Embed Size (px)
Citation preview

SPATIAL COGNITION AND COMPUTATION,vol(issue), 1–endCopyright c© YYYY, Lawrence Erlbaum Associates, Inc.
Ontological Modularity and Spatial Diversity
John Bateman∗ Stefano Borgo∗∗ Klaus Luttich∗Claudio Masolo∗∗ Till Mossakowski∗∗∗
∗Universitat Bremen, Bremen, Germany∗∗Laboratory for Applied Ontology (ISTC-CNR), Trento, Italy
∗∗∗DFKI Lab Bremen, Bremen, Germany
In this paper we propose that adequate treatments of space need to bemultiperspectival and related to sound foundational ontologies. To supportthis, we show that natural spatial descriptions commonly appeal to diversetheories of space and these need to be formally combined to be fullyinterpreted. Our account draws particularly on the foundational ontologyDOLCE and the algebraic specification language CASL. We show how thestructuring mechanisms of CASL suggest mechanisms for both building andcombining multiperspectival ontologies of space. We also suggest that thesemechanisms provide a natural link both with currently emerging cognitiveprinciples such as blending and with developments in ontology mediationand mapping.
Keywords: Ontology, Spatial Ontology, Navigation, Spatial Language, Spa-tial Semantics, Algebraic Specifications, Modularity, Way-finding
1 Introduction
Much is now known about a rich assortment of spatially-relevant phenomena andframeworks. We have available entire families of formal calculi for qualitativereasoning about space, ranging from treatments of pure regions and their con-nections (RCC: Randell et al., 1992) to orientation calculi (including Double-cross (Freksa, 1992) and the STARm family of calculi (Renz and Mitra, 2004)), tohybrid systems combining objects of distinct dimensionalities or qualitative and
Authors are given in alphabetical order. Correspondence concerning this article should be addressed to:John Bateman, FB10 Sprach- und Literaturwissenschaften, University of BremenPostfach 330440, 28334 Bremen, Germany

2 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
quantitative information (Egenhofer and Rodrıguez, 1999; Gerevini and Renz,1998). We have formalizations of route knowledge (e.g., Werner et al., 2000;Krieg-Bruckner et al., 2005) and some good understandings of the kinds of ref-erence frames that people adopt when describing and, arguably, conceptualizingspace (e.g., Levinson, 1996; Eschenbach, 1999). We even have a range of distinctkinds of spatial entities at hand, including relative places (Donnelly, 2005), nichesand sites (Smith and Varzi, 1999), anchors (Galton and Hood, 2005), bound-aries (Smith and Varzi, 2000) and many more. In short, the problem is fast becom-ing not one ofhavingformalizations of space, spatial entities and spatial attributes,but far more what to do with the very large number of possible alternatives (andtheir combinations) that are on offer.
This surfeit of possibilities should be an advantage, as we can pick ratherprecisely-tuned spatial descriptions as appropriate for the solution of various tasks.We might also beneficially ask questions concerning which aspects of the descrip-tions find empirical support as cognitively-plausible models and which do not.However current practice is somewhat different. The existence of alternative, per-haps competing, descriptions is in many cases placed on one side while a particu-lar descriptive alternative is explored further. The problem ofcombiningdisparatedescriptions remains a significant open issue.
In this paper, the issue of combining alternative perspectives on space is ourcentral focus. We argue that it is natural that a broad range of diverse spatialaccounts have developed since that is precisely how humans go about dealingwith space. By focusing on natural language formulations of certain spatially-embedded tasks, such as route instructions, spatial configuration descriptions andverbalized way-finding activities, for example, we show that it is extremely rareto find an utterance that doesnot combine contributions from distinct theories ofspace. Somewhat more far-reachingly, we suggest that this is a common featureof language as such: linguistic formulations have as one of their functions therole of combining distinct realms of world-modelling. On the one hand, this re-lates naturally to notions of conceptual spaces and the prominent role currentlybeing given to theblendingof such spaces (Fauconnier and Turner, 2003); on theother hand, it makes direct contact to current efforts in ontological engineering toachieve and manage heterogeneous ontological components where there may bemultiple co-existing formalizations that need to be combined.
Our primary goal in this paper will then be to set out how we can capture thekinds of informal theory-combinations concerning space that we see in naturallanguage utterances by employing a properly formalized treatment ofontologicalmodularity. This can move us towards frameworks that provide the benefits andpartial solutions of all of the spatial frameworks mentioned above without compro-mising their intrinsic integrity. We also suggest that formally relating ontologicalmodules is a fundamental component of ontological engineering that goes beyondpractical requirements set by, for example, re-use. Indeed, any ontological treat-

SPATIAL AND ONTOLOGICAL MODULARITY 3
ment of an area may turn out to require formally related but distinct ontologicalmodules to be defined simply by virtue of the intrinsic multiperspectivalism ofsensible treatments of our everyday reality.
The backbone of our approach is accordingly provided by a solid foundationin ontological engineering. The criteria adopted for deciding when informationbelongs together and how it is to be articulated draws on ontological considera-tions, both in terms of the actual categories adopted and in terms of the kinds ofmethodologies applied during development. Our starting point will be the De-scriptive Ontology for Linguistic and Conceptual Engineering (DOLCE: Masoloet al., 2003) and we apply the organizational principles of OntoClean (Guarinoand Welty, 2004) throughout. We will demonstrate that a framework of this kindprovides a natural home for the distinct sources and organisations of knowledgewith which we are concerned.
Our selected area of illustrative application, route descriptions and navigationinvolving spatial configurations and relationships, provides ample examples ofhow relations and entities can take on quite different forms, with differing prop-erties and consequences for inference, depending on how they are utilised. Inthis area we have differences that are due not only to broadly different concep-tualizations for various tasks, such as for example, the diverse requirements ofrepresenting designed environments from their designer’s perspectivevs. theiruser’s perspectives (cf. Timpf, 2002), but also to the involvement of ontologicallydistinct realms, such as time, space and physical objects. We aim to explain thesedivergent ‘properties’ by referring to distinct cleanly defined ontological moduleswhich are then combined as needed.
Formally, we adopt the proposals of Luttich and Mossakowski (2004) and Krieg-Bruckner et al. (2005) and use the logical specification language, CASL (CommonAlgebraic Specification Language: Mosses, 2004), for ontology specification. Inthis framework, inter-ontology relationships can be captured as explicit theorymorphisms (or certain diagrams of these, see Zimmermann et al. (2006)). Thisplaces our work within a growing ontological tradition where category theoryis being explored for relating ontologies as theories. This approach has a rela-tively long tradition in Geographic Information Science approaches to ontology,largely driven by the very clear need to relate diverse geographic perspectiveson the world (cf. Frank, 1999, 2001; Fonseca et al., 2002); it is also receivingcloser attention in the formal ontology community more generally (cf. Uscholdet al., 1998; Krotzsch et al., 2005; Hitzler et al., 2006; Zimmermann et al., 2006).Our principal contributions to this tradition are then:(i) to argue for a thoroughaxiomatic integration with established foundational ontologies,(ii) to provide asingle framework for specifying and structuring relationships between ontologi-cal modules that range from simple renamings up to full theory morphisms acrosscomponents expressed in differing logics,(iii) to illustrate an integrated devel-opment environment that enables specifications to be developed, maintained and

4 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
verified using standardly available automatic and semi-automatic theorem provers,and (iv) to relate the abstract specifications developed to the concrete require-ments of applications requiring spatial understanding and spatial dialogue.
We structure the paper as follows. In Section 2, we begin with a brief informalmotivation of the need to combine ontological modules drawing on linguistic ev-idence; this draws on a range of established data and empirical experimentationthat has collectively aimed at revealing how speakers and hearers naturally dealwith spatial problems of various kinds. Then, having motivated ontological mod-ularity in broad terms, we set out in Section 3 the ontological foundations for ourapproach and the generic position of space within this. In Section 4, we first showhow the large-scale structuring techniques of CASL can be used for defining dis-tinct ontological modules and set out in more detail some treatments of space andspatially-relevant categories. We then show how CASL provides sophisticatedmechanisms for relating modules in ways appropriate for the diversity needed. InSection 5 we build on this foundation to present a detailed example in which somedistinct spatial interpretations must be combined to solve a spatial task. Finally,in Section 6, we briefly summarize our results and suggest further directions forthe future.
2 Ontological diversity in natural utterances
Consider the following rather unexceptional way-finding utterance:
Go from Bremen to Trento, crossing the Italian border at Brennero.
Despite its simplicity, closer examination reveals that a semantically diverse rangeof entities is being invoked. In particular, the first clause, ‘go from Bremen toTrento’, is a simple path description, while the second clause, ‘cross the Italianborder at Brennero’, talks instead of a movement across a boundary between twoextended spatial regions. Moreover, digging deeper, we can separate out the useof the names ‘Bremen’, ‘Trento’ and ‘Brennero’ as identifying points on a pathdescription, and ‘Italy’ as naming a geopolitical region. In each case, a range ofspatial relationships is being brought into play. These relationships can draw fromthe entities explicitly named to a greater or lesser degree. Bremen and Trento asnamed cities are being invoked somewhat minimally in the path description: i.e.,very little of their physical properties of being extended collections of buildings,streets, parks, etc. finds its way into the semantics relevant for understanding theexample. And, conversely, particular physical objects can find their way into avariety of relationships. This is shown in the following collection:
This road runs from Bremen to TrentoThis road divides Germany from Austria
Go along the road until the churchGo across the road to the church

SPATIAL AND ONTOLOGICAL MODULARITY 5
Here some physically identifiable object is used first as a path, or link, betweentwo named entities, second as a boundary between two regions, third as a shapethat can be followed parallel to a main axis, and fourth as a shape that can betraversed orthogonally to the main axis;1 such shifts have received considerablediscussion in the linguistic literature on spatial language (cf. Talmy, 2006).
One approach in ontology to capturing what is going on in the above sentencesis the direct one of saying, for example, that a road is also a connectorand adividing line and a path that is followed, or that a church is a building with afront and a locationand a landmark. But such a move has serious problems inthat it confuses distinct entities, each with their own distinctive properties andexistence. A conjunctive combination or logical extension of the theory of any ofthese with the theories of the others is potentially problematic because there is noguarantee, and indeed in general no reason to expect, that the combined theoryis self-consistent. An example of this from Geographic Information Systems iswhere a body of water might be classified according to distinct interest groupsas a source of drinking water, a recreational area, a boundary between differentland-animal habitats, and a link in a traffic network served by a ferry (cf. Fonsecaet al., 2002; Kuhn and Raubal, 2003). The logical properties of a boundary and alink are almost opposite: a boundary divides, a link connects.
The problematic nature of these kinds of potentially contradictory classifica-tions has been handled in a number of ways in the literature, ranging from simpleunion of diverging properties (e.g., by multiple inheritance) to more sophisticatedtreatments in terms ofroles. For Fonsecaet al., for example, roles become a gen-eral way of incorporating perspectives or contexts into an ontological account. Asthey themselves note, however, this involves a substantial extension of the notionof role. A more complete treatment is still required. Here we follow more inthe tradition illustrated by Kuhn & Raubal and others, and pursue formalizationsof relations between perspectives considered as theories. In particular, we investi-gate the use of ontological modules and views between such modules as providinga general account of the flexibility of relationships clearly necessary for dealingwith space and spatial representations.
3 Formal ontology, axiomatization, DOLCE and space
In the previous section we motivated the need for an ontological system that canconsistently manage several types of entities (and their relationships) and that isverifiable. Since our goal is not specific to a particular application and since themain notions we are dealing with (space, object, location) are widely used in (pos-sibly) any domain, we now posit two general requirements: the ontology shouldbe (i) formal, i.e., available as a logical theory (to make possible consistency
1We note here that although temporal issues are also involved, particularly in navigation, our dis-cussion here will focus on the spatial aspects almost exclusively due to length constraints.

6 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
checks and faithful implementations) and(ii) foundational(to provide an overallframework where, in principle, the disparate entities we need to consider can findroom). Among the ontologies in the literature, only a few have been developedaddressing (more or less satisfactorily) these requirements. Among these we findDOLCE, the Descriptive Ontology for Linguistic and Cognitive Engineering (Ma-solo et al., 2003); GFO, the General Formal Ontology (Heller and Herre, 2004);BFO, the Basic Formal Ontology (Smith and Grenon, 2004; Thomas et al., 2004);and OPENCYC (Cycorp, 2004). A comprehensive overview of the individualpositions taken in these accounts is given in Farrar and Bateman (2004). Further-more, from Section 2 we see that an ontological system apt for our task must alsoallow for different representations and perspectives about space. We thus add athird requirement:(iii) the ontology shouldnot be committedto a specific view ofspace and spatial qualities. When we consider the third requirement, we find thatDOLCE is the only (formal and foundational) system that provides a frameworkin which alternative space and quality representations can co-exist. We have thusdecided to adopt DOLCE as the underlying ontological system for our work.
DOLCE is a first-order axiomatic theory that formalizes a set of quite generalcategories (top-level), a framework where other categories can be introduced (de-pending, for instance, on application concerns), and some guidelines on how toformalize new categories. It provides most of what is necessary when attemptingto formalize a domain in which spatial representations are required. Here we de-scribe only the part relative to qualities of physical objects since this suffices forour present goals. Although we have all the formal elements necessary to dealwith time, for the sake of simplicity in this paper we do not consider temporalchanges of physical objects. Thus, we drop temporal parameters in the fragmentof DOLCE that we describe. A complete description of the system is given in Ma-solo et al. (2003).
Physical objects, like a building, a train, a tunnel, a mountain and a forest,form the DOLCE category of physical endurants, i.e., those objects which have alocation in space (and time). People differentiate physical endurants because ofa variety of aspects and characteristics such as color, weight, smell, size, shape,temperature, etc. Technically, these distinctions are represented in DOLCE viathe notions ofindividual quality, quality-typeandquality-space.
Individual qualities (e.g. “the color of my car” and “the weight of John”)inherein specific individuals, i.e. they existentially depend on specific individuals (mycar and John, respectively). The color of my car and, for example, the color ofyour car aredifferent individual qualities even if both cars happen to be Ferrari-red: the first quality is necessarily related to my car while the latter is only relatedto your car. In this paper, we focus only on those qualities that are inherent in phys-ical endurants; in DOLCE these are calledphysical qualities. Individual physicalqualities, or simply qualities, are grouped into categories according to the aspectsof the objects they represent. These categories are calledquality-types: the color

SPATIAL AND ONTOLOGICAL MODULARITY 7
quality-type collects all the individual qualities about color, the weight-qualitytype all the individual qualities about weight, etc.
Qualities in the same quality-type can be compared according to differentquality-spacesthat reflect “subjective” (context dependent, qualitative, etc.) points ofview. Each quality-space consists of a set of individuals calledpositionsthat areorganized by means of one or morestructural relations(e.g. order, metric, topo-logical, etc.). Individual qualities are then mapped to positions: qualities thatshare the same position are considered to be indistinguishable. For example, theweight of two amounts of salt may be indistinguishable in the quality-space as-sociated with a baby scale but not in the one associated with a precision balance.In the first case, the two individual weights are mapped to the same position (say20.10 grams), while in the second case to two distinct weights (say 20.10001grams and 20.10002 grams). In this sense, positions represent the capacity ofa specific quality-space to distinguish individual qualities; by means of differentquality-spaces it is possible to choose the needed quantitative/qualitative degreesof similarity, i.e. the requiredgranularities.
The extension of DOLCE presented in Masolo and Borgo (2005) allows eachquality-type to be associated with one or more pairwise disjoint quality-spaces(which depend on culture, instruments of investigation etc.). This extension isfundamental for our present discussion. However, in contrast to this extension,we do not require here that an individual quality is necessarily mapped toall thequality-spaces associated with its quality-type. This is important in order to allowfor partial information. For example, we might have the position of “the weightof John” in the quality-space associated with a baby scale but not in the one asso-ciated with a precision balance. If both positions are given, then the informationrelative to the same individual quality (and therefore to the same physical en-durant) can becombined, i.e. a link between these positions belonging to differentquality-spaces can be established “from the bottom”. Alternatively, information indifferent quality-spaces can be combined “from the top” by systematically link-ing the positions in different spaces on the basis of external knowledge that wehave about the structures of the spaces themselves. Knowing the precision and thescales of the two balances in the previous example, it is possible to introduce amorphism between the associated quality-spaces. In Section 4 we will introducethe formal mechanism we have adopted to express these two ways of combininginformation, and in Section 5 we will apply them to a specific example.
This approach to qualities and quality-spaces provides a particularly effectiveset of mechanisms for addressingphysical spaceand spatial information. Differ-ently from other foundational ontologies, DOLCE does not commit to a specificnotion of physical space. That is, each physical endurant has aspatial location(anindividual quality) that can be mapped to different positions belonging to quality-spaces corresponding to specific views on physical space (e.g. topological, Eu-clidean, mereological, metric and so on). The spatial location is then considered

8 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
as just one among the characteristics of physical endurants. Using this approachto space representation, different ways of structuring the spatial quality-type canbe consistently used in the same formalism. Some quality-spaces associated withthe spatial location quality-type may be atomic and others atomless; some maysatisfy complex mathematical properties and others just basic principles. Spatialoperators, like the mereological sum of positions, may be defined in some spacesand not in others, and so on.
We now briefly show how DOLCE (and its extensions) formalizes the notionsintroduced above.
Formally, we writePED(x) to mean thatx is in thePED category. i.e. “x isa physical endurant”. Similarly, we usePQ for the category of physical qualitiesandPQi for the quality-typei (wherei can be color, weight etc.). Then, expres-sionsPQ(x) andPQcolor(x) stand for “x is a physical quality” and “x is a colorquality”, respectively. The inherence relation between a qualityx and its (unique)physical enduranty (axioms (A1) and (A2)) is writteninh(x, y)2. Physical quali-ties existentially depend on physical objects (A3) and, given a quality-typei, it isrequired that an endurant can only have one quality of that type (A4). Among thequality-types we consider at least the spatial location (SL) and we assume that allphysical endurants have an individual quality inSL (A5).
(A1) inh(x, y) → PQ(x) ∧ PED(y)
(A2) inh(x, y) ∧ inh(x, y′) → y = y′
(A3) PQ(x) → ∃y(inh(x, y))
(A4) inh(x, y) ∧ inh(x′, y) ∧ PQi(x) ∧ PQi(x′) → x = x′
(A5) PED(x) → ∃y(inh(y, x) ∧ SL(y)).
We writepos(x, y) to mean “x is a position (in a quality-space) of the qualityy” (A6).3 The set of all physical positions (i.e. positions associated with physicalqualities) is indicated withPP while the set of the positions for a quality-typeiin the quality-spacej is indicated byPP j
i .4 The formula
PQcolor(y) ∧ pos(x, y) ∧ pos(x′, y) ∧ PP rgbcolor(x) ∧ PP cymk
color (x′)
tells us that the object having color qualityy has locationx in the RGB color spaceand has locationx′ in the CYMK color space.5 Each position must live in a singlespace (A7) and, within a single space, the position is unique (A8).
2In the original version of DOLCE this relation is writtendqt.3In the original version of DOLCE this relation is writtenql and has a temporal argument that it is
omitted here because change in time is not being considered.4In the original version of DOLCE physical positions are called physical regions and are written
PR. We avoid this usage here in order to achieve a more perspicuous terminological distinctionbetween spatial regions and the abstract formal spaces involved in qualities.
5We should note here that there is no mention of qualia in this extension of DOLCE; we leave themaside to simplify the formalization since they do not play a role central to our account here.

SPATIAL AND ONTOLOGICAL MODULARITY 9
(A6) pos(x, y) → PP (x) ∧ PQ(y)
(A7) if j 6= k then¬∃x(PP ji (x) ∧ PP k
i (x))
(A8) pos(x, y) ∧ pos(x′, y) ∧ PP ji (x) ∧ PP j
i (x′) → x = x′.
As already noted, to allow partial information, we do not require that
PQi(x) →∧
j(∃y(pos(y, x) ∧ PP ji (y))).
The weaker position
PQi(x) →∨
j(∃y(pos(y, x) ∧ PP ji (y)))
could be more acceptable, but we prefer an even weaker commitment acceptingqualities without any position, i.e., we just strengthen (A6) assuming:
PQi(x) ∧ pos(y, x) →∨
j(PP ji (y)).
The general framework introduced is illustrated in Figure 1. Note thatinh is aninjective function and thatpos is a (partial) function.
PP 11
PQ1
pos22eeeeeeeeeeeeeeeeee
pos ,,YYYYYYYYYYYYYYYYY ...
PP 1m1
PEDvv
inh
llllllllllllllllllii
inhSSSSSSSSSSSSSSSSSS
......
PPn1
PQn
pos22eeeeeeeeeeeeeeeee
pos ,,YYYYYYYYYYYYYYYYY ...
PPnmn
Figure 1.: The DOLCE mechanism of quality-type and quality-spaces.
Considered formally it might appear that qualities can be avoided by introduc-ing (partial) functions, one for each quality-space, that directly link physical en-durants to positions as suggested in Figure 2. As discussed in Masolo and Borgo(2005), however, it would then be impossible to express the fact that, for exam-ple, the quality-spaces with positions inPP 1
1 , . . . , PP 1m1
describe different pointsof view on thesameaspect of physical endurants, like the RGB and the CYMKcolor spaces. In contrast, the quality-spaces with positions inPP 1
1 andPPn1 de-
scribe different characteristics of endurants, like color and weight for example.

10 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
By means of quality-types, it is possible in DOLCE to “cluster” all the quality-spaces relative to the same aspect. An equivalence relation between positionscould simulate this clustering, but we prefer the former approach because it pro-vides an ontological “interpretation/explanation” of the clustering. In addition, wecan note that it is possible only in our approach to represent the fact that a physicalendurant has a quality of a specific type (for example, that it has a color-quality)even though no positions of that quality are provided in any quality-space. Thisprovides a mechanism to represent very general properties of endurants (for ex-ample the fact that they are colored, independently of which color they have) thatcan be useful in applications.
PP 11
...
PP 1m1
PED
pos11
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjpos1m1
11ccccccccccccccccccccccccccccccccccposn
1
--\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
posnmn
**UUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUU...
PPn1
...
PPnmn
Figure 2.: Avoiding qualities.
Taking all these issues into account, in the following sections we explore howto use quality-spaces and to relate them for the application considered in this pa-per. The general goal is to combine information that is captured in two (or more)different spaces about the same quality-type or that comes from spaces about dif-ferent quality-types.
4 Large-scale structuring for ontological modules with CASL
Having introduced our ontological position and the possibility that DOLCE offersfor capturing multiple perspectives on space, we show in this section how this canbe formally structured in terms of ontological modules defined using the CommonAlgebraic Specification Language, CASL (Mosses, 2004). To do this, we firstintroduce the basic language constructs relevant for richly axiomatized ontologiesas originally proposed by Luttich and Mossakowski (2004) and then go on to show

SPATIAL AND ONTOLOGICAL MODULARITY 11
how the basic CASL language construct of theviewsupports the specification oftheory morphisms that bring different ontological modules into relation with oneanother.
4.1 Ontology specifications and modules
CASL is described in detail in, for example, Mosses (2004); here we focus partic-ularly on the use of CASL for ontology specification and proceed by means of abrief example. In the following specification taken from our current work involv-ing formalization of the DOLCE ontology as a CASL specification, we can see thebasic structuring mechanisms provided. This specification constructs the axiom-atization of qualities introduced in the previous section and contains componentspecifications, bracketed withinspec. . .endkeywords. Each CASL specificationcan be seen as a logical theory.
specQUALITY TYPE[sortsq, Elem] =pred inh : q× Elem % (A1)%∀ x, x′ : q; y, y′ : Elem• inh(x, y) ∧ inh(x, y′) ⇒ y = y′ % (A2)%• inh(x, y) ∧ inh(x′, y) ⇒ x = x′ % (A3)%• ∃ y : Elem• inh(x, y) % (A4)%
end
specSTRONGQUALITY TYPE[sortsq, Elem] =QUALITY TYPE[sortsq, Elem]
then ∀ y : Elem• ∃ x : q • inh(x, y) % (A4 a)%end
specQUALITY SPACE[sortss, q] =pred pos: s× q % (A6)%∀ x, x′ : s; y : q • pos(x, y) ∧ pos(x′, y) ⇒ x = x′ % (A7-A8)%
end
specPARTHOOD =PARTIAL ORDER with <= 7→ P
end
The first specification, QUALITY TYPE, sets up the basic property of qualitiesof being unique to the entities that they inhere in by stating appropriate axioms onthe predicate inheres (inh). We also declare at this point some sorts (types), whichare interpreted loosely as any sets, and the typing of the predicate. The correct typ-ing of each predicate in a CASL specification is statically checked by the CASLdevelopment environment, Hets (Mossakowski et al., 2007). Clearly further basic

12 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
properties of theinh relation can be axiomatized here as required. QUALITY -TYPE is extended (extension is marked by the keywordthen) to the specificationSTRONGQUALITY TYPE. These quality types are qualities that arerequired toinhere in particular entities. This allows us later to state that each physical en-durant necessarily has a spatial location. The third specification QUALITY SPACE
defines theposition relation (pos). Finally, we userenaming(written using thekeywordwith ) to define the usual ontological mereological notion of PARTHOOD
on the basis of the standard CASL theory PARTIAL ORDER: the <= relation ofthe partial order is renamed as theP of parthood; we also show the definition ofPARTIAL ORDER below when we discuss theory morphisms. Renaming of speci-fications, in particular in combination with their union (written using the keywordand) allows specifications to be re-used and avoids their repetition (as demon-strated by the specification APPLICATIONQUALITIES in Section 5 below).
Combining specifications in this way corresponds to a strong notion of onto-logical modularity. Our specification of DOLCE consists of many such modules,expressed in terms of individual specifications/theories. These are then combinedin a single composite specification via union. This kind of modularity is of con-siderable benefit when working with large axiomatized ontologies since it allowsconsistency and other properties to be checked on the smallest possible extracts ofthe ontology before proceeding to their combination. Ontological modules of thisnature are therefore components of a single combined ontology and so can also betermed sub-ontologies. Naturally, such modules can be re-used to build other on-tologies and provide a formalized and implemented rendering of the well-knownproposal to consider ontologies in terms of a ‘lattice of theories’ as promulgatedby John Sowa and others.
4.2 Relations between modules as theory morphisms
Constructing composite specifications by means of union and extension is not yetsufficient for capturing the account of space set out within DOLCE in the previoussection. Here there is a different kind of modularity at work. We have seen thatDOLCE supports the formalization ofalternativeperspectives on space and otherqualities. In general, these perspectives may draw on quite different characteri-zations that would resist simple composition. To formalize these notions, eachspaceSi described in Section 3 above is nevertheless formalized as a, possiblycomposite, CASL theory. However, particularly in the context of the SFB/TR8Collaborative Research Center on Spatial Cognition, we now have access to abroadening range of spatial calculi receiving a formalization in CASL. These varyacross Doublecross, RCC5, RCC8, Route Graphs, and several others (cf. Wolfland Mossakowski, 2005; Krieg-Bruckner and Shi, 2006). Although we may stillrefer to these theories as sub-ontologies, in one particular sense they can also beseen as alternativeontologies. Each such theory corresponds to a particular candi-

SPATIAL AND ONTOLOGICAL MODULARITY 13
date characterization of the world and soeachsuch theory represents a candidate‘ontology’ of space.
This directly relates the mechanisms that we employ for relating such alterna-tives to the broader case of considering relations between distinct ontologies ingeneral. The definition and inter-relation of ontologies as such is currently beingseen as a crucial problem for the development of ontologically-based semantictreatments, such as, for example, for the semantic web and its inescapable het-erogeneity in contents, forms and intentions. Its relevance for relating distinctkinds of spatially-relevant information has also recently been argued in terms ofsemantic reference systems by Kuhn and Raubal (2003). The issue itself is an oldone, however, going back to the earliest attempts to provide re-usable ontologicalcomponents for ontological engineering. Current work within the ontology com-munity focusing on sophisticated re-use is moving to richer and more formalisedframeworks, such as the Information Flow Framework developed mathematicallyby Barwise and Seligman (1997) and promoted for ontology use by Kent (2000).There are now an increasing number of proponents of this and similarly strongmathematical accounts for the problem of combining and re-using ontologies. Ourown approach therefore falls within this new ‘tradition’.
The essential construct provided by CASL for supporting this aspect of ourontology work is theview. Views provide a means for defining a logical inter-pretation of a source theory in terms of a target theory. The constraint on theirdefinition is that the axioms of the source specification, when translated along theview, must be provable in the target specification. This amounts to an interpreta-tion of theories in the sense of logic.
Establishing views between specifications allows for theories to be proved thatbind specifications together in general. Thus, any knowledge that we have aboutone domain is then generally applicable to the other. The following shows this inaction and also sets up some of the constructs we will use in our example below.We first provide some quite generic specifications concerning basic relations withwide application: the mathematical notions of pre-orders and partial orders. Wethen also provide a specification for the notion ofconnectionas used in connectioncalculi and other treatments of space (for more details of this, see, for example,Casati and Varzi, 1999).
specPREORDER =sort Elempred <= : Elem× Elem∀ x, y, z : Elem• x <= x % (refl)%• x <= z if x<= y∧ y <= z % (trans)%
end
specPARTIAL ORDER =

14 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
PREORDER
then ∀ x, y : Elem• x = y if x <= y∧ y <= x % (antisym)%end
specCONNECTION =sort Elempred connected : Elem× Elem∀ r, s : Elem• r connected r % (refl connected)%• s connected r⇒ r connected s % (sym connected)%• s= r ⇔ ∀ z : Elem• z connected r⇔ z connected s % (equal regions)%
end
We can then establish a general relationship between the theory of connectionand the theory of partial orders by providing and then proving the following view.
view CONNECTION INDUCES PARTIAL ORDER :PARTIAL ORDER to{CONNECTION
then pred <= (x, y : Elem) ⇔∀ z : Elem• z connected x⇒ z connected y % (<= def)%
}end
Given this we know that we can move between the theory of connection and thetheory of partial order at will: results proved of one can be used of the other. Theproof statuses shown in Figure 3 and explained below demonstrate the view as awhole has been proved and can be relied upon in subsequent specifications.
Work with CASL specifications proceeds via the development tool Hets(Mossakowski et al., 2007). The primary user interface of Hets is formed bythe Structure Graph, which shows dependencies between specifications and theproof statuses of their component theories. In Figure 3 we see an extract ofthe Structure Graph of the specifications for our examples in this paper. Eachnamed node represents the final theory of a structured specification and eachunnamed node represents intermediate steps.6 The unnamed node below CON-NECTION in the graph, for example, is the extension of CONNECTION with thepredicate ‘ ≤ ’ defined in terms ofconnectedas needed for the view CON-NECTION INDUCES PARTIAL ORDER we have just given.
Arrows always point in the direction of development; here there are two dif-ferent types shown: (1) Dark (black) arrows denote the usual extension and unionof specifications; and (2) light grey (green) arrows denote views. Some of thegrey arrows are introduced on the fly for the instantiation of generic specifica-tions like DISTANCE (defined below) and those leading to the grey (red) node
6Views may also have intermediate specifications.

SPATIAL AND ONTOLOGICAL MODULARITY 15
Figure 3.: Structure Graph of the CityExample library with some inspectors
below CONNECTION and PARTIAL ORDER. The arrows and nodes indicate proofstatuses and outstanding proof obligations. These can be examined directly byactivating associated inspectors. Some inspectors for edges, showing signaturemorphisms, and for nodes, displaying theories—both derived automatically fromthe specification—are also shown in Figure 3. The thick arrows with open headsconnect the opened inspection windows to their corresponding nodes or arrows.
Hets allows for the automatic decomposition of views into theorems. Some ofthem can be proved on the structured level, which Hets can perform automatically,while others have to be shown with some automatic or semi-automatic theoremprover executed by Hets. The window shown in the lower right of the figure is usedfor the delegation of goals to the chosen prover. In the figure as displayed, all theselected goals have just been proved (in this case by the standard theorem proverSPASS) as shown by the[+] in front of the goal names. This means that theproof obligations for the view have been discharged: pre-order and partial orderhave been shown in terms of connection and so the view holds. After achieving aproof, Hets shows and stores the proofs in a uniform way so that they can be re-used in subsequent development. In this way, it is possible to build up composite

16 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
theories in which diverse spatial perspectives have been formally combined asrequired butwithoutcompromising the ontological modularity of the components.
We can then move on to provide further details more specific to space andwhich will be used in our example below. First, we provide a specification ofnavigation networks defined on the basis ofroute graphs. Krieg-Bruckner et al.(2005) have already provided a generic specification of route graphs; this hasbeen augmented further by an axiomatization of orientation calculi, particularlyDoublecross, by Krieg-Bruckner and Shi (2006). For present purposes, we focusonly on the linked graph-like aspect of the representation by defining route graphsto be a specialization of linked lists. This allows apathto be defined as a particularkind of linked list from one node to another as follows:
specROUTEGRAPH =L INKEDL IST [sort node
pred link : node× node]then %def
pred path: node× node∀ x, y : node• path(x, x) % (refl path)%• path(x,y) ⇔ ∃ L : List[node] • LinkedList(x :: (L ++ [ y ])) % (path def)%
end
L INKEDL IST is itself defined in the usual way that lists are specified and so willnot be spelled out explicitly here. Relevant is only the use of aparameterizedspecification, shown by the square brackets, that makes available its nodes andlinks for the subsequent definition of paths. We then relate links and paths assuch, and without reference to other theories, as follows:
specWEAKROUTEGRAPH =sort nodepreds link, path: node× node∀ x, y, z : node• path(x, x) % (path refl)%• link(x, y) ⇒ path(x, y) % (links are paths)%• link(x, y) ∧ path(y, z) ⇒ path(x, z) % (link prefix of path yields path)%
end
This structured and modular definition of route graphs (which could then beaugmented further as required, for example by relating to particular spatial calculi)also allows a further simple example of the utility of expressing views betweentheories. First, we combine our specification of route graphs based on linked listsand the weaker specification7 that relates links to paths:
7It is weaker because it does not preclude e.g. that thepath predicate holds everywhere.

SPATIAL AND ONTOLOGICAL MODULARITY 17
view PATHAPPROXIMATION :WEAKROUTEGRAPH to ROUTEGRAPH
end
This (proved) view establishes that the two specifications are in important respectsinterchangeable. We can then use the weak route graph for theory proving whenthe more complex specification is not required. This kind of modularity is usedto good effect below since it pre-structures and simplifies the sets of axioms thatneed to be considered when proving theorems automatically.
Then, we establish a result concerning properties of route graphs in general byspecifying and proving a view between route graphs and pre-orders:
view PATH ON ROUTEGRAPH IS A PREORDER :PREORDER to ROUTEGRAPH = <= 7→ path
end
This informs us that all theorems provable with respect to the pre-order are alsoprovable with respect to path. We can subsequently rely on this for developmentand specification in that any attempt to construct a route graph that does not up-hold this property will not be consistent with what has been established this far.Moreover, we can employ such general constraints to aid in combining informa-tion sources: in order to maintain the overall consistency of a route graph, it maybe necessary, for example, to combine certain nodes or to posit the existence ofundiscovered nodes. Finally, we employ this view in the next section for simpleway-finding.
5 Putting it all together (while keeping it all apart)
In this section, we present a single running example that involves a set of routeinstructions that necessarily involves combinations of information from variousperspectives. Our main aim is to show how a modularized ontological frame-work can cover the necessary information without in any way compromising themodelling of the individual areas. The relations constructed between areas of on-tological specification, which, as we described above, may be regarded either asontology submodules or alternative ontologies depending on the particular areaaddressed, are of several different kinds. At the most basic level, specificationswill be brought together by relating particular instances; slightly more abstractare relations between specifications brought about either by renamings of rela-tions and entities or by unions of modules; and most abstract still are the generalrelations between alternative perspectives achieved by specifying morphisms be-tween theories. The least abstract hold for particular elements that we are makingstatements about; the most abstract provide theories about how distinct areas ofspecification necessarily correspond and so hold for all elements that may be de-scribed using the theories brought into relationship with one another.

18 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
The example is as follows. It is seen as a possible answer to be generated by aninformation system when asked by its user to provide a way-finding description toa branch of the user’s bank. It is our goal to provide a sufficiently detailed and on-tologically motivated specification of the situation so as to support the generationof such responses automatically.
The closest branch of your bank is in Chinatown. Take the subwayhere and get off at Tung Station. It’s the only station in that area.There are three banks that are not so far from the station. I suggestyou to go to the one behind Jiang Square. You can recognize it easilybecause it is a red building.
The example is constructed in order to bring out a reasonable range of complex-ities but without requiring explanations that would be beyond the detail possiblein this paper. However, based on our analyses of a variety of route instructioncorpora, we can state that the example is not particularly odd concerning the com-bination of information that it requires. There is precisely the mix of spatial infor-mation of different kinds as well as other physical qualities that supports landmarkidentification.
Chinatown
Bank1red
Bank2green Bank3
red
Tung-Station
s2
Jiang-Square
F
s4
CentralStation
Figure 4.: The spatial situation handled in our example
The spatial situation that is assumed for our example is shown in Figure 4.Here we see the assumed starting point (the subway station ‘Central Station’)linked via a navigation network to the target subway station (‘Tung Station’) thatlies within the city administrative region ‘Chinatown’. In addition to the banks,which are shown with a partially discriminating physical quality of color, there is

SPATIAL AND ONTOLOGICAL MODULARITY 19
an alternative route via a fountain (marked by ‘F’)—this is in the world but wasnot used in the description.
A location quality space defines a particular perspective on space, i.e., a partic-ular range of possible positions for the qualities involved. In a region-based space,the possible positions are given by regions, their connections and subregions; ina route-graph based space, the possible positions are given by nodes in the routenetwork. Physical objects are therefore positioned with a range of diverse spatialperspectives. Often, relating between these is not possible ‘directly’ and compos-ite mappings from one space to another may need to be constructed. A centralfeature of our account will be how we use physical endurants (e.g., a bank or asquare) to bring together positions within distinct quality spaces.
Our description of the example will proceed as follows. We set out the spec-ification that is required to capture the relevant aspects of the world—these areformed from a combination of generic foundational information imported fromour ontological basis and particular entities specific to the described domain. Onthe basis of this specification, we will then show that the way-finding descriptionto be generated can beprovedas a theorem following from the specification usingthe support tools introduced in the previous section.
We can start by setting up the notion of an administrative area in a city as fol-lows. A CITYAREA is defined by using CONNECTION from above; the elementsthat may be connected then yield CITYAREAs. A specification CITYAREA PARTHOOD
then combines information from both CITYAREA and PARTHOOD, again with ap-propriate import and renaming of the required entities by means of parameteriza-tion.
specCITYAREA =CONNECTION with Elem 7→ CityArea
end
specCITYAREA PARTHOOD [PARTHOOD with Elem 7→ CityArea[k1]][CITYAREA with CityArea 7→ CityArea[k2]] =
free typeAreas::= sorts CityArea[k1], CityArea[k2]and PARTHOOD with Elem 7→ Areas, P 7→ isInend
A free type declaration imposes a fixed (non-loose) interpretation to a sort; here,Areas is declared to be the disjoint union ofCityArea[k1 ] andCityArea[k2 ].Following these specifications we can talk of (and prove theorems about) cityareas as being in other city areas (isIn) and as being connected.
We also require a way of talking about qualitative distance for our example.This further perspective on space we introduce very simply as follows; again, it isto be emphasized that this can be further complicated or augmented as required.
specDISTANCE[sort Elem] =

20 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
free typeDistance::= coincide| near | not so far | farop distance: Elem× Elem→ Distance, comm∀ x, y, z : Elem• distance(x, y) = coincide if x= y % (distance0)%
end
Here, thefree type declares an enumeration type consisting of exactly four ele-ments.distanceis declared to be a commutative binary operation. And, to permitus to talk about distance between city areas, we combine these into a MAP speci-fication thus:
specMAP =DISTANCE[CITYAREA fit sort Elem 7→ CityArea]
end
The next stage is to specify the basic ‘ground facts’ of the example. In generalthis is a relatively simple process because it draws directly on the foundationalontology and the categories that it provides. Most relevant for us here is the sit-uation when we have available descriptions that rely ondistinct quality spaces.As we saw in Section 2 above, natural language descriptions can draw on a di-verse range of kinds of space—we can take this flexibility over into our modellingdirectly. Thus the following specification states that we have the strong qual-ity types of color and spatial location. We have one kind of color quality space(RGB) and several spatial quality spaces: two that are instantiations of kinds ofroute graphs—one for the subway stations and one for the city entities; and twothat are built on city areas—one for buildings and the other for administrative ar-eas. The basic entities of the domain are also defined at this point: stations andbanks are buildings, buildings are physical endurants, etc. The remaining partsof the specification—for example, stating that physical endurants (PED) are sub-types of endurants (ED), etc.—are given by DOLCE; we include them here tomake the example locally complete because we use precisely these specificationsin the automatic proofs reported on below.
specAPPLICATIONQUALITIES =STRONGQUALITY TYPE [sortsColor,PEDfit q 7→ Color, Elem 7→ PED]
and QUALITY SPACE [sortsRGB, Color fit q 7→ Color, s 7→ RGB]and STRONGQUALITY TYPE [sortsSL, PEDfit q 7→ SL, Elem 7→ PED]and QUALITY SPACE [sortsnode[sub], SLfit q 7→ SL, s 7→ node[sub]]and QUALITY SPACE [sortsnode[city], SLfit q 7→ SL, s 7→ node[city]]and QUALITY SPACE [sortsCityArea[Building], SL
fit q 7→ SL, s 7→ CityArea[Building]]and QUALITY SPACE [sortsCityArea[Area], SL
fit q 7→ SL, s 7→ CityArea[Area]]then sorts Station,Bank< Building; Building, Square, Fountain< PED;

SPATIAL AND ONTOLOGICAL MODULARITY 21
PED< ED; SL, Color < PQ; PQ< QT;node[sub], node[city], CityArea[Building], CityArea[Area] < S;RGB< CR; CR, S< PP
predspos: S× SL;pos: CR× Color
∀ x : SL• ∃ y : S• pos(y, x) % (A7 S)%∀ x : Color • ∃ y : CR• pos(y, x) % (A7 cl)%
end
Within this overall structure we now identify the particular entities involved andtheir properties. Particular nodes are located in particular types of route graphs,particular spatial locations are identified via position in spatial quality spaces,particular colors are given via position in color quality spaces, etc. The individualqualities and relations necessary for our example are given in the following spec-ifications; their connection with the entities in which they inhere follows below.The reader can readily confirm that the information contained here is essentiallylocal and could be provided straightforwardly for the situation depicted graphi-cally in Figure 4 above. The appended parts of the variable names (e.g.,sl inB1 sl) are a mnemonic device to show the kind of information involved (e.g., thespatial location of building 1): this, of course, plays no role for the formal prop-erties of the specifications defined. Nodes in, for example, a route-graph derivedspecification only receive positions within a route-graph derived quality space,and so on.
specSUBWAY RG OF DOMAIN =QUALITY SPACE [WEAKROUTEGRAPH then sort SLfit q 7→ SL, s 7→ node]
then ops Central Stationns, s1 ns, s2 ns, TungStationns, s4 ns: node;Central Stationsl, s1 sl, s2 sl, TungStationsl, s4 sl : SL
• link(s1 ns, Central Stationns)• link(Central Stationns, s2 ns)• link(Central Stationns, TungStationns)• link(s2 ns, TungStationns)• link(TungStationns, s4 ns)• pos(Central Stationns, Central Stationsl)• pos(s1 ns, s1 sl)• pos(s2 ns, s2 sl)• pos(TungStationns, TungStationsl)• pos(s4 ns, s4 sl)
end
specCHINATOWNRG OF DOMAIN =QUALITY SPACE [WEAKROUTEGRAPH then sort SLfit q 7→ SL, s 7→ node]
then ops TungStationnc, Sqnc, B1 nc, B2 nc, B3 nc : node;TungStationsl, B1 sl, B2 sl, B3 sl, Sqsl : SL

22 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
• link(TungStationnc, Sqnc)• link(Sqnc, B1 nc) % (link Sq B1)%• link(TungStationnc, B2 nc)• link(TungStationnc, B3 nc)• pos(TungStationnc, TungStationsl)• pos(B1 nc, B1 sl) % (pos B1)%• pos(B2 nc, B2 sl)• pos(B3 nc, B3 sl)• pos(Sqnc, Sqsl) % (pos Sq)%
end
specMAP OF DOMAIN =QUALITY SPACE[M AP then sort SLfit q 7→ SL, s 7→ CityArea]
then ops B1 sl, B2 sl, B3 sl, s2 sl, TungStationsl, s4 sl : SL;B1 creg,B2 creg,B3 creg, TungStationcreg,s2 creg, s4 creg:CityArea
• pos(s2 creg, s2 sl)• pos(TungStationcreg, TungStationsl)• pos(s4 creg, s4 sl)• pos(B1 creg, B1 sl)• pos(B2 creg, B2 sl)• pos(B3 creg, B3 sl)• distance(B1 creg, TungStationcreg) = not so far• distance(B2 creg, TungStationcreg) = not so far• distance(B3 creg, TungStationcreg) = not so far
end
specCOLORS OF DOMAIN =QUALITY SPACE[sortsColor, RGBfit q 7→ Color, s 7→ RGB]
then ops B1 co, B2 co, B3 co : Colorfree typeRGB::= red | green| blue| grey• pos(red, B1 co)• pos(red, B3 co)• pos(green, B2 co)
end
specAREAS OF DOMAIN =CITYAREA
then ops Chinatown, NotChinatown: CityArea• ¬ Chinatown= NotChinatown % (Chinatown is distinct from NotChinatown)%• Chinatown connected NotChinatown % (Chinaton con. NotChinatown)%• ∃ x : CityArea• ¬ x = Chinatown∧ ¬ x = NotChinatown
% (existence of an area apart from Chinatown and NotChinatown)% %implied

SPATIAL AND ONTOLOGICAL MODULARITY 23
end
We bind together particular elements of the disparate perspectives in severalways. For route-graph derived spaces we specify transitions that provide a simpleconnection between route graphs (analogous to thetransfersdescribed betweenroute graphs in Krieg-Bruckner et al. (2005)).
specROUTEGRAPHTRANSITION [ROUTEGRAPH with node7→ node[1]][ROUTEGRAPH with node7→ node[2]] =
free typenodes::= sorts node[1], node[2]and ROUTEGRAPH with node7→ nodesend
specWEAKROUTEGRAPHTRANSITION
[WEAKROUTEGRAPH with node7→ node[1]][WEAKROUTEGRAPH with node7→ node[2]] =
free typenodes::= sorts node[1], node[2]and WEAKROUTEGRAPH with node7→ nodesend
We then apply this specification to bring together distinct route graph nodes asfollows.
specSUBWAY CONNECTED CHINATOWN OF DOMAIN =WEAKROUTEGRAPHTRANSITION [SUBWAY RG OF DOMAIN
with node7→ node[sub]][CHINATOWNRG OF DOMAIN
with node7→ node[city]]then • link(TungStationns: node[sub], TungStationnc : node[city])end
This combines the notion of Tung Station as a node in a subway network and TungStation as a node in a network of navigation paths around the city (presumably viaroads, walkways, etc.). Note that at this point in the specification, we do not knowanything further that relates the two entities.
We combine the areas that buildings occupy in the city with their respective ad-ministrative areas with the following specifications. First we establish a morphismbetween the city area map and parthood in order to reason about the administrativeareas and to specifyisIn relations. This is very similar to the view relating part-hood and connection illustrated in Section 4 above. Then we relate city regionsidentified by buildings with their containing administrative areas.
view MAP OF DOMAIN INDUCES PARTHOOD :{PARTHOOD with Elem 7→ CityArea[k1]} to{MAP OF DOMAIN with CityArea 7→ CityArea[Building]
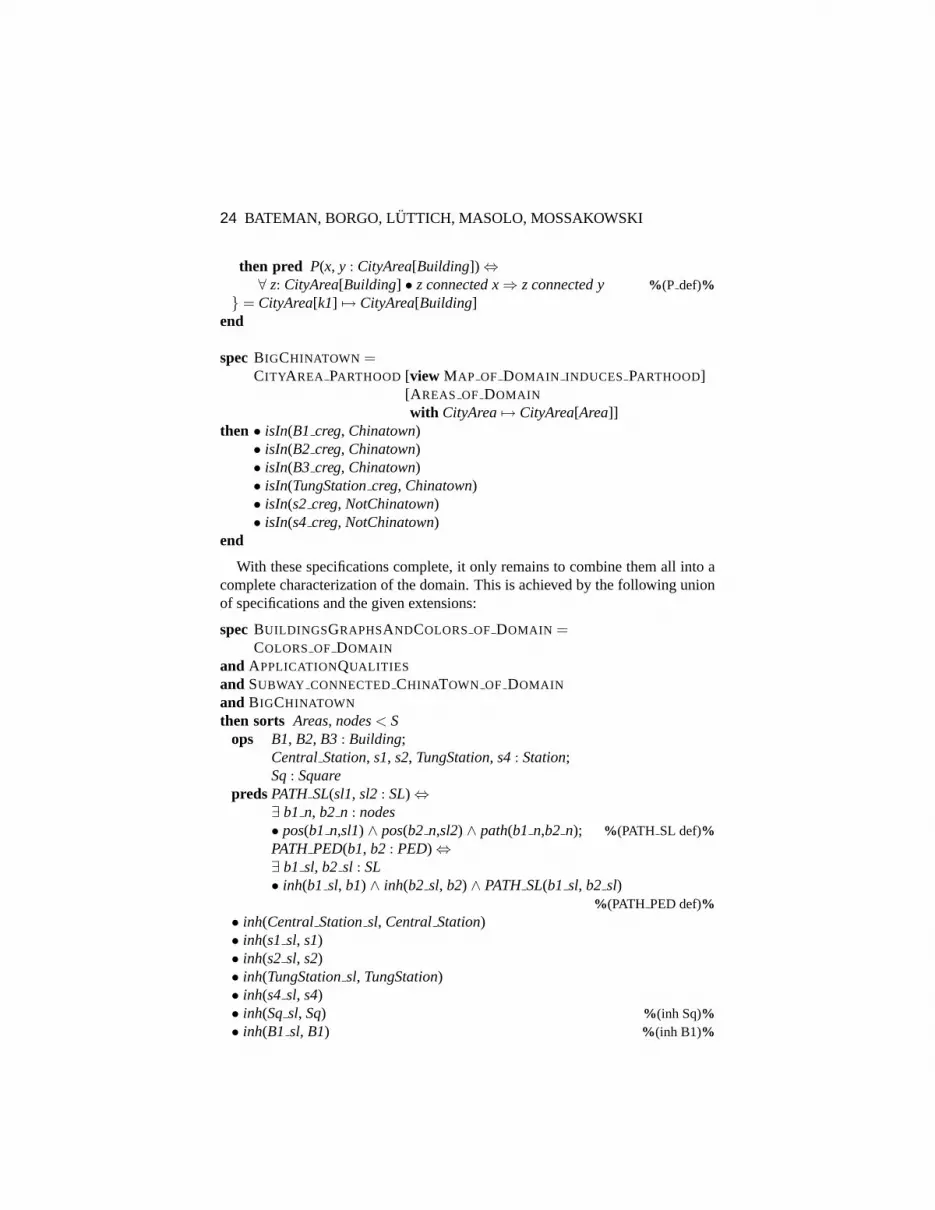
24 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
then pred P(x, y : CityArea[Building]) ⇔∀ z: CityArea[Building] • z connected x⇒ z connected y % (P def)%
} = CityArea[k1] 7→ CityArea[Building]end
specBIGCHINATOWN =CITYAREA PARTHOOD [view MAP OF DOMAIN INDUCES PARTHOOD]
[A REAS OF DOMAIN
with CityArea 7→ CityArea[Area]]then • isIn(B1 creg, Chinatown)
• isIn(B2 creg, Chinatown)• isIn(B3 creg, Chinatown)• isIn(TungStationcreg, Chinatown)• isIn(s2 creg, NotChinatown)• isIn(s4 creg, NotChinatown)
end
With these specifications complete, it only remains to combine them all into acomplete characterization of the domain. This is achieved by the following unionof specifications and the given extensions:
specBUILDINGSGRAPHSANDCOLORS OF DOMAIN =COLORS OF DOMAIN
and APPLICATIONQUALITIES
and SUBWAY CONNECTED CHINATOWN OF DOMAIN
and BIGCHINATOWN
then sorts Areas, nodes< Sops B1, B2, B3 : Building;
Central Station, s1, s2, TungStation, s4: Station;Sq: Square
predsPATH SL(sl1, sl2 : SL) ⇔∃ b1 n, b2 n : nodes• pos(b1 n,sl1) ∧ pos(b2 n,sl2) ∧ path(b1 n,b2 n); % (PATH SL def)%PATH PED(b1, b2 : PED) ⇔∃ b1 sl, b2 sl : SL• inh(b1 sl, b1) ∧ inh(b2 sl, b2) ∧ PATH SL(b1 sl, b2 sl)
% (PATH PED def)%• inh(Central Stationsl, Central Station)• inh(s1 sl, s1)• inh(s2 sl, s2)• inh(TungStationsl, TungStation)• inh(s4 sl, s4)• inh(Sqsl, Sq) % (inh Sq)%• inh(B1 sl, B1) % (inh B1)%

SPATIAL AND ONTOLOGICAL MODULARITY 25
• inh(B2 sl, B2)• inh(B3 sl, B3)• inh(B1 co, B1)• inh(B2 co, B2)• inh(B3 co, B3)
end
By these means, the entire structure of the domain has been set up (largely im-ported from the foundational ontology), the particular qualities and their typesnecessary have been specified, paths linking particular entities have been estab-lished, and the relations between the physical endurants of the domain and theirqualities given. Loading the entire specification into Hets gives a complete struc-tured theory of the domain that has been statically typed checked. Remainingproof obligations that are entailed by the specification are also indicated and ad-dressed at this point. The extract from a Structure Graph shown in Figure 3 wasdrawn from this complete specification.
Using the account for reasoning about the domain then proceeds by establish-ing theorems that are to be proved or disproved with respect to the specification.In order to answer our initial question in this example, therefore, we provide atheorem that describes the information need of the user. At present we rely onthe linking of CASL and a collection of automatic and semi-automatic theoremprovers provided by Hets. In general, and for future applications, we will exploreusing more specialized reasoners for particular problem areas, such as graph nav-igation, spatial reasoners, and so on. Even without this specialization, the genericreasoners are still able both to provide proofs for theorems stated within our spec-ification and to deliver particular solutions. These can, in general, require theoriesfrom different domains to be ‘combined’.
For the current example, we would want to prove the theorem that there is apath from the Central Station, which is the starting point, and the building the usershould try to get to; i.e., we need to prove:
∃ x : Building• PATH PED(Central Station, x)
wherex is also a building hosting a bank of the required type. When passedto an automatic theorem prover, the structure of our specification then naturallyleads it to bring distinct domains together in the search for a proof. The defi-nition of PATH PED given above states that this predicate holds when there isa PATH SL holding between the spatial locations that inhere in the physical en-durants involved. The definition ofPATH SLthen holds when the spatial locationsrelated have positions (in some quality space) such that the positions satisfy thepathpredicate. In general, finding solutions here will depend on the mathematicalstructure of the quality spaces involved. We can, however, prove statements aboutpaths using the general result of the previous section that a view holds between

26 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
paths in a route graph and the pre-order relation. While the formal specification interms of linked lists may not deliver the most performance efficient result, it is cer-tainly sufficient for establishing the correctness or otherwise of the specificationand does, in fact, in this case produce several possible solutions.
Finding the particular solution to present to a user would then involve severalfurther issues from way-finding and route instruction—all of which can be suc-cessively added to the account given here. Precisely which information is selectedis dependent on the physical qualities that are available for forming landmarkdescriptions, the length of the paths to be admitted, the possibility of discriminat-ing between similar entities in the description, and so on. The dialogue systemswith which we are working currently, for example, frequently require dynamicallycomposed theorems of these kinds to be resolved. We can ascertain, for example,that the simpler route description “get out at Tung Station and go to the red build-ing that is not too far away” wouldnotbe sufficient because the following impliedstatements are proved when given to a theorem prover (concretely in this case,SPASS):
specSOMEDOMAIN THEOREMS=BUILDINGSGRAPHSANDCOLORS OF DOMAIN
thenpredsquery1(x : Building; c1 : CityArea[Building]) ⇔
(∃ cl : Color • inh(cl, x) ∧ pos(red, cl))∧ ∃ cr : CityArea[Building]• (∃ sl : SL• inh(sl, x) ∧ pos(cr, sl))∧ distance(c1, cr) = not so far
• query1(B1, TungStationcreg) % (query1 B1)% %implied• ¬ query1(B2, TungStationcreg) % (not query1 B2)% %implied• query1(B3, TungStationcreg) % (query1 B3)% %implied
The predicatequery1is used as shorthand to pick out some building that is redand ‘not too far’ from some city region. The proof status of the subsequent threetheorems shows that this holds with respect to the Tung Station city region for bothbuildings B1 and B3 and not for building B2. Further discriminating informationtherefore needs to be found—for example, that a given path must be followed(e.g., reaching the square first) or that the building is in a particular city area (e.g.,Chinatown).
Finally, the following theorem has a unique solution, the bank that we are tryingto describe a path to, and so our path description is complete:
specSOMEDOMAIN THEOREMS(cont’d)=BUILDINGSGRAPHSANDCOLORS OF DOMAIN
thenpredsquery1· · · [see above]
query2(x : Building; c1 : CityArea[Building]) ⇔

SPATIAL AND ONTOLOGICAL MODULARITY 27
query1(x, c1)∧ ∃ x nc : node[city]• (∃ x sl : SL• inh(x sl, x) ∧ pos(x nc, x sl))∧ path(s2 ns, Sqnc) ∧ path(Sqnc, x nc)
% (s2 to red building notso far away of TungStation, behind a Sq)%• ∃ x : Building• (∃ sl : SL; ca : CityArea[Building]• inh(sl, TungStation) ∧ pos(ca, sl) ∧ query2(x, ca))∧ (∃ sl : SL; ca : CityArea[Building]• inh(sl, TungStation) ∧ pos(ca, sl) ∧ isIn(ca, Chinatown))
∧ PATH PED(Central Station, x)% (path from CentralStation to a Building in Chinatown which is red and
not so far from TungStation and behind a Square)% %impliedend
6 Conclusions and Outlook
The mechanisms we have illustrated here provide a well founded means of ground-ing issues arising in spatial reasoning and communication within an ontologicallysophisticated specification system. We have shown how it is possible to build upa specification in which distinct perspectives on space can be characterized andrelated to other kinds of entities necessary for interacting in the spatial domain.We have illustrated several distinct mechanisms for relating distinct ontologicalmodules, ranging from entity-to-entity renamings to general theories that allowback-and-forth mappings across theories. These are all combined in a structurallyclean specification framework.
There is, however, clearly very much more to do. We are working on both theformal underpinnings of specifying and discovering theory morphisms and theuse of the kinds of specifications we have seen in actual spatial dialogue systems.Many of the particular specifications and theorems we have used as illustrationshere will in the end need to be produced automatically, either by directly importingontological specifications and theory-mapping results or by providing semanticinterpretations of natural language dialogue acts. These extensions will also finda natural home, however, in the broad ontological axiomatic framework we havedescribed.
The use of stronger modularization strategies for ontologies in order to bring re-use issues under control is also currently gaining considerable importance in othercontexts, such as that of the Semantic Web. Cuenca Grau et al. (2006) describe,for example, some of the benefits and problems of decomposing an ontology intosubmodules related by connective mappings. Their suggestion that optimizationscan result from the fact that the different modules may even adopt different logicsis very similar to some of the motivations that underlie our own work. Moreover,

28 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
whereas their proposed framework involves different members of the descriptionlogic family, in our approach we are not restricted in this way and can considerrelations ranging more broadly across any kind of logic supported by CASL andthe development environment. In general, ontology modules may be combinedin a variety of ways, ranging from the simplest and most widespread relation ofontology inclusion to more complex inter-ontology relationships.
We can also usefully relate what we have described in this paper to manythreads currently being followed in the semantic and ontology mapping commu-nities in general. In Stuckenschmidt and Uschold (2005), for example, severalpositions are set out and problems identified. The explicit answers given in ourframework to questions such as the nature of semantic mappings, their status asfirst class entities, and their organisation and role in an overall account provideconcrete proposals for the issues raised. We have linked particular formalizationsof space to ways of talking about space and have shown how those formalizationsmay be placed in relation to one another in terms of declaratively specified theorymorphisms. This allows information to be followed through different combina-tions and to be accumulated in order to reason about spatial problems. We alsosee the combined theories that are produced by views as standing as one possibleinstantiation of the formal theory of blends proposed by Goguen (1999). Herewe have suggested, for example, that a spatial perspective in terms of nodes in agraph can be related, or blended, with a view in terms of areas. In our currentwork, we are exploring the nature of these combinations in more detail as well asconsidering how the selection of particular blends over others is indicated by taskand dialogue information.
In summary, we have shown how the kinds of specifications developed heremake direct use of and extend well researched and developed foundational on-tologies. We see the flexibility and logical foundation of our approach and itscombinationwith practical application brought about by exploring particular for-malizations of space for supporting intelligent spatial behavior as an extremelypromising way of moving beyond purely theoretical discussion of several criticalissues.
Acknowledgments.This cooperative work between Bremen and Trento was sup-ported by theDeutsche Akademische Austausch Dienst(DAAD) and theMin-istero dell’Istruzione, dell’Universita e della Ricerca(MIUR) within the jointlyorganized VIGONI cooperation program (Projekt D/04/42045: “ALT-INFO”).Bateman, Luttich and Mossakowski also gratefully acknowledge the support oftheDeutsche Forschungsgemeinschaft(DFG) through the Collaborative ResearchCenter SFB/TR 8 “Spatial Cognition”. The authors also thank three anonymousreviewers for their extensive and very helpful comments.

SPATIAL AND ONTOLOGICAL MODULARITY 29
References
Barwise, J. and Seligman, J. (1997).Information flow: the logic of distributedsystems. Number 44 in Cambridge Tracts in Theoretical Computer Science.Cambridge University Press.
Casati, R. and Varzi, A. C. (1999).Parts and places: the structures of spatialrepresentation. MIT Press (Bradford Books), Cambridge, MA and London.
Cuenca Grau, B., Parsia, B., and Sirin, E. (2006). Combining OWL ontologiesusingE-connections.Journal of Web Semantics.
Cycorp (2004). Opencyc 0.7.0. Technical report.
Donnelly, M. (2005). Relative places.Applied Ontology, 1(1):55–75.
Egenhofer, M. and Rodrıguez, A. (1999). Relation algebras over containers andsurfaces: An ontological study of a room space.Spatial Cognition and Compu-tation, 1(2):155–180.
Eschenbach, C. (1999). Geometric structures of frames of reference and naturallanguage semantics.Spatial Cognition and Computation, 1(4):329–348.
Farrar, S. and Bateman, J. (2004). General ontology baseline. SFB/TR8 internalreport I1-[OntoSpace]: D1, Collaborative Research Center for Spatial Cogni-tion, University of Bremen, Germany.
Fauconnier, G. and Turner, M. (2003).The Way We Think: Conceptual Blendingand the Mind’s Hidden Complexities. Basic Books, New York.
Fonseca, F., Egenhofer, M., Davis, C., and Camara, G. (2002). Semantic granular-ity in ontology-driven geographic information systems.Annals of Mathematicsand Artificial Intelligence, 36(1–2):121–151.
Frank, A. U. (1999). One step up the abstraction ladder: Combining algebras- from functional pieces to a whole. In Freksa, C. and Mark, D. M., edi-tors,Spatial Information Theory: Cognitive and Computational Foundations ofGeographic Information Science, International Conference COSIT ’99, Stade,Germany, August 25-29, 1999, Proceedings, pages 95–107.
Frank, A. U. (2001). Tiers of ontology and consistency constraints in geograph-ical information systems.International Journal of Geographical InformationScience, 15(7):667–678.
Freksa, C. (1992). Using orientation information for qualitative spatial reasoning.In Frank, A. U., Campari, I., and Formentini, U., editors,Theories and methodsof spatio-temporal reasoning in geographic space, volume 639 ofLNCS, pages162–178. Springer, Berlin.

30 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
Galton, A. and Hood, J. (2005). Anchoring: A new approach to handling indeter-minate location in GIS. In Cohn, A. G. and Mark, D. M., editors,Proceedingsof Spatial Information Theory: International Conference, COSIT 2005, pages1–13. Springer-Verlag.
Gerevini, A. and Renz, J. (1998). Combining topological and qualitative sizeconstraints for spatial reasoning. InProceedings of the 4th international con-ference on principles and practice of constraint programming (CP’98), Berlin.Springer-Verlag.
Goguen, J. (1999). An introduction to algebraic semiotics, with applications touser interface design. In Nehaniv, C., editor,Computation for metaphors, anal-ogy and agents, number 1562 in LNAI, pages 242–291. Springer, Berlin.
Guarino, N. and Welty, C. (2004). An overview of OntoClean. In Staab, S. andStuder, R., editors,Handbook on Ontologies. Springer-Verlag, Heidelberg andBerlin.
Heller, B. and Herre, H. (2004). General ontological language GOL: A formalframework for building and representing ontologies. Technical Report 7, Insti-tute for Medical Informatics, Leipzig, Germany. In collaboration with PatrykBurek, Frank Loebe and Hannes Michalek.
Hitzler, P., Krotzsch, M., Ehrig, M., and Sure, Y. (2006). What is ontology merg-ing? - a category-theoretical perspective using pushouts. InProceedings ofC&O’06 Contexts and ontologies: theory, practice and applications.
Kent, R. E. (2000). The information flow foundation for conceptual knowledgeorganization. InProceedings of the 6th. international conference of the inter-national society for knowledge organization (ISKO), Toronto, Canada.
Krieg-Bruckner, B., Frese, U., Luttich, K., Mandel, C., Mossakowski, T., andRoss, R. (2005). Specification of an Ontology for Route Graphs. In Freksa, C.,Knauff, M., Krieg-Bruckner, B., Nebel, B., and Barkowsky, T., editors,SpatialCognition IV: Reasoning, Action, Interaction. International Conference SpatialCognition 2004, Frauenchiemsee, Germany, October 2004, Proceedings, pages390–412, Berlin, Heidelberg. Springer.
Krieg-Bruckner, B. and Shi, H. (2006). Orientation calculi and route graphs:Towards semantic representations for route descriptions. In Raubal, M., Miller,H., Frank, A., and Goodchild, M., editors,Geographic Information Science- Fourth International Conference, GIScience 2006, number 4197 in LectureNotes in Computer Science. Springer, Berlin.
Krotzsch, M., Hitzler, P., Ehrig, M., and Sure, Y. (2005). Category theory inontology research: Concrete gain from an abstract approach. Technical report,AIFB, Universitat Karlsruhe, Karlsruhe.

SPATIAL AND ONTOLOGICAL MODULARITY 31
Kuhn, W. and Raubal, M. (2003). Implementing semantic reference systems. InM.F.Gould, editor,6th AGILE Conference on Geographic Information Science.
Levinson, S. (1996). Frames of reference and Molyneux’s question: Crosslinguis-tic evidence. In Bloom, P., Peterson, M., Nadel, L., and Garrett, M., editors,Language and Space, pages 109–169. MIT Press, Cambridge, MA.
Luttich, K. and Mossakowski, T. (2004). Specification of ontologies in CASL.In Varzi, A. C. and Vieu, L., editors,Proceedings of the International Confer-ence on Formal Ontology in Information Systems (FOIS-2004), pages 140–150,Amsterdam. IOS PRess.
Masolo, C. and Borgo, S. (2005). Qualities in formal ontology. In Hitzler, P.,Lutz, C., and Stumme, G., editors,Foundational Aspects of Ontologies (FOnt2005) Workshop at KI 2005, pages 2–16, Koblenz, Germany.
Masolo, C., Borgo, S., Gangemi, A., Guarino, N., and Oltramari, A. (2003).Ontologies library (final). WonderWeb Deliverable D18, ISTC-CNR, Padova,Italy.
Mossakowski, T., Maeder, C., and Luttich, K. (2007). The Heterogeneous ToolSet. In Grumberg, O. and Huth, M., editors,Thirteenth International Confer-ence on Tools and Algorithms for the Construction and Analysis of Systems(TACAS 2007). Tool available atwww.tzi.de/cofi/hets , University ofBremen.
Mosses, P. D., editor (2004).CASL Reference Manual. Number 2960 in LNCS.Springer, Berlin.
Randell, D., Cui, Z., and Cohn, A. (1992). A spatial logic based on regions andconnection. InProceedings of the 3rd. International Conference on KnowledgeRepresentation and Reasoning, pages 165–176, San Mateo. Morgan Kaufmann.
Renz, J. and Mitra, D. (2004). Qualitative direction calculi with arbitrary gran-ularity. In Zhang, C., Guesgen, H. W., and Yeap, W. K., editors,Proceedingsof the 8th Pacific Rim International Conference on Artificial Intelligence on AI(PRICAI), pages 65–74. Springer-Verlag.
Smith, B. and Grenon, P. (2004). The cornucopia of formal-ontological relations.Dialectica, 58(3):279–296.
Smith, B. and Varzi, A. C. (1999). The Niche.Nous, 33(2):214–238.
Smith, B. and Varzi, A. C. (2000). Fiat and bona fide boundaries.Philosophy andphenomenological research, 60(2):401–420.
32 BATEMAN, BORGO, LUTTICH, MASOLO, MOSSAKOWSKI
Stuckenschmidt, H. and Uschold, M. (2005). Representation of semanticmappings. In Kalfoglou, Y., Schorlemmer, M., Sheth, A., Staab, S., andUschold, M., editors,Semantic Interoperability and Integration, number04391 in Dagstuhl Seminar Proceedings, Dagstuhl, Germany. InternationalesBegegnungs- und Forschungszentrum fur Informatik (IBFI), Schloss Dagstuhl,Germany.
Talmy, L. (2006). The fundamental system of spatial schemas in language. InHampe, B., editor,From perception to meaning: image schemas in cognitivelinguistics, pages 37–47. Mouton de Gruyter, Berlin.
Thomas, B., Maureen, D., and Barry, S. (2004). Endurants and perdurants indirectly depicting ontologies.AI Communications, 17(4):247–258.
Timpf, S. (2002). Ontologies of wayfinding: a traveler’s perspective.Networksand Economics, 2(1):9–22.
Uschold, M., Clark, P., Healy, M., Williamson, K., and Woods, S. (1998). An ex-periment in ontology re-use. InProceedings of the 1998 Banff Knowledge Ac-quisition for Knowledge Based Systems Workshop (KAW98), Calgary, Canada.
Werner, S., Krieg-Bruckner, B., and Herrmann, T. (2000). Modelling naviga-tional knowledge by route graphs. In Freksa, C., Brauer, W., Habel, C., andWender, K., editors,Spatial Cognition II - Integrating Abstract Theories, Em-pirical Studies, Formal Methods, and Practical Applications, pages 295–316.Springer, Berlin.
Wolfl, S. and Mossakowski, T. (2005). CASL specifications of qualitative calculi.In Cohn, A. G. and Mark, D. M., editors,Proceedings of Spatial InformationTheory: International Conference, COSIT 2005, number 3693 in LNCS, pages200–217, Berlin. Springer.
Zimmermann, A., Krotzsch, M., Euzenat, J., and Hitzler, P. (2006). Formalizingontology alignment and its operations with category theory. In Bennett, B. andFellbaum, C., editors,International Conference on Formal Ontology in Infor-mation Systems (FOIS 2006), volume 150 ofFrontiers in Artificial Intelligenceand Applications. IOS Press, Amsterdam.





























