Embed Size (px)
Citation preview

Draft Accepted for Publication in Color Research and Applications-Wiley-2015
1
Physics-Based Spectral Sharpening through Filter-Chart
Calibration
Mohamed Abdellatif
Faculty of Engineering and Technology,
Future University in Egypt, Cairo, Egypt
Abstract: The spectral overlap of color-sampling filters increases errors when using a
Diagonal Matrix Transform, DMT, for color correction and reduces color distinction.
Spectral sharpening is a transformation of colors that was introduced to reduce color-
constancy errors when the colors are collected through spectrally overlapping filters. The
earlier color constancy methods improved color precision when the illuminant color is
changed, but they overlooked the color distinction. In this paper, we introduce a new spectral
sharpening technique that has a good compromise of color precision and distinction, based on
real physical constraints. The spectral overlap is measured through observing a gray reference
chart with a set of real and spectrally disjoint filters selected by the user. The new sharpening
method enables to sharpen colors obtained by a sensor without knowing the camera response
functions. Experiments with real images showed that the colors sharpened by the new method
have good levels of color precision and distinction as well. The color-constancy performance
is compared with the data-based sharpening method in terms of both precision and
distinction.
Keywords: Spectral sharpening, filter-chart spectral sharpening, data-based sharpening,
accuracy–precision evaluation, color distinction, decorrelation stretch, color constancy.
INTRODUCTION
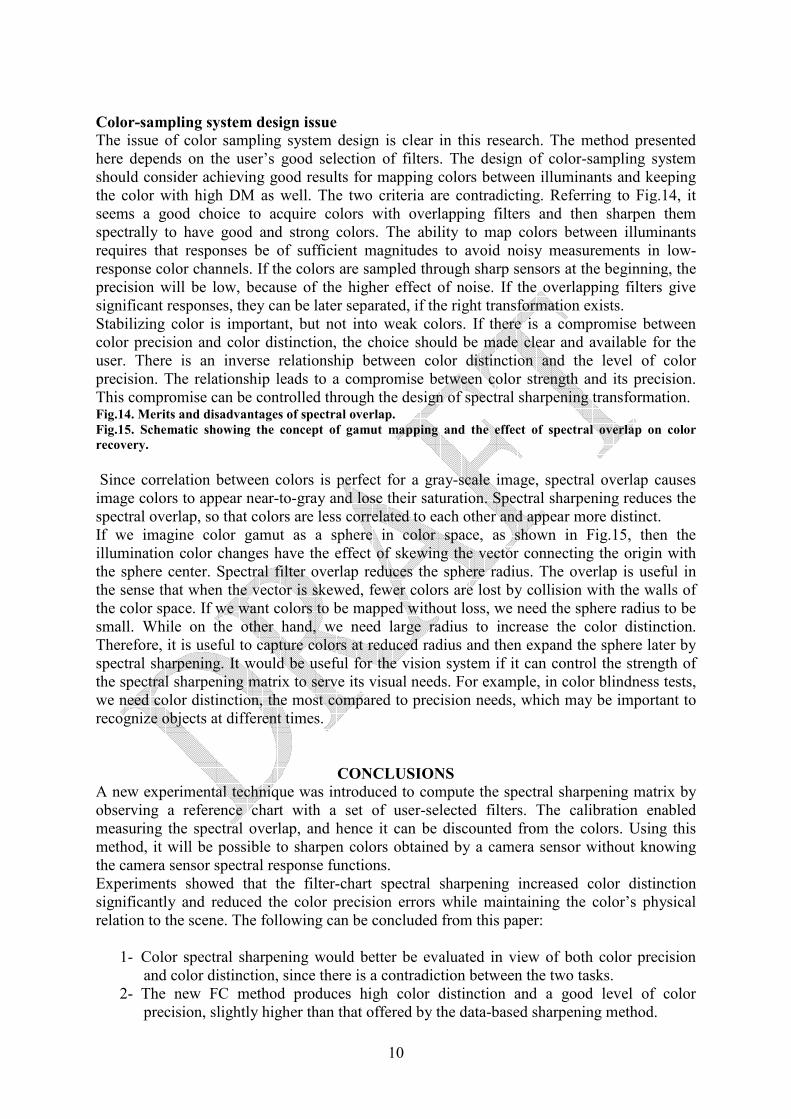
Color responses in an image captured by a camera are strongly affected by the spectral
response functions of the camera sensors [1, 2]. When camera sensors are spectrally
overlapping, as shown in Fig.1, the produced colors have less distinction, and are near to gray
color. Moreover, overlapping filters increase errors for color constancy algorithms when
using DMT for color correction. Spectral sharpening is a linear transformation for the color
responses made to reduce errors when using DMT color-constancy algorithms as proposed in
[1]. Spectral sharpening can also produce enhanced colors for vision algorithms (requiring
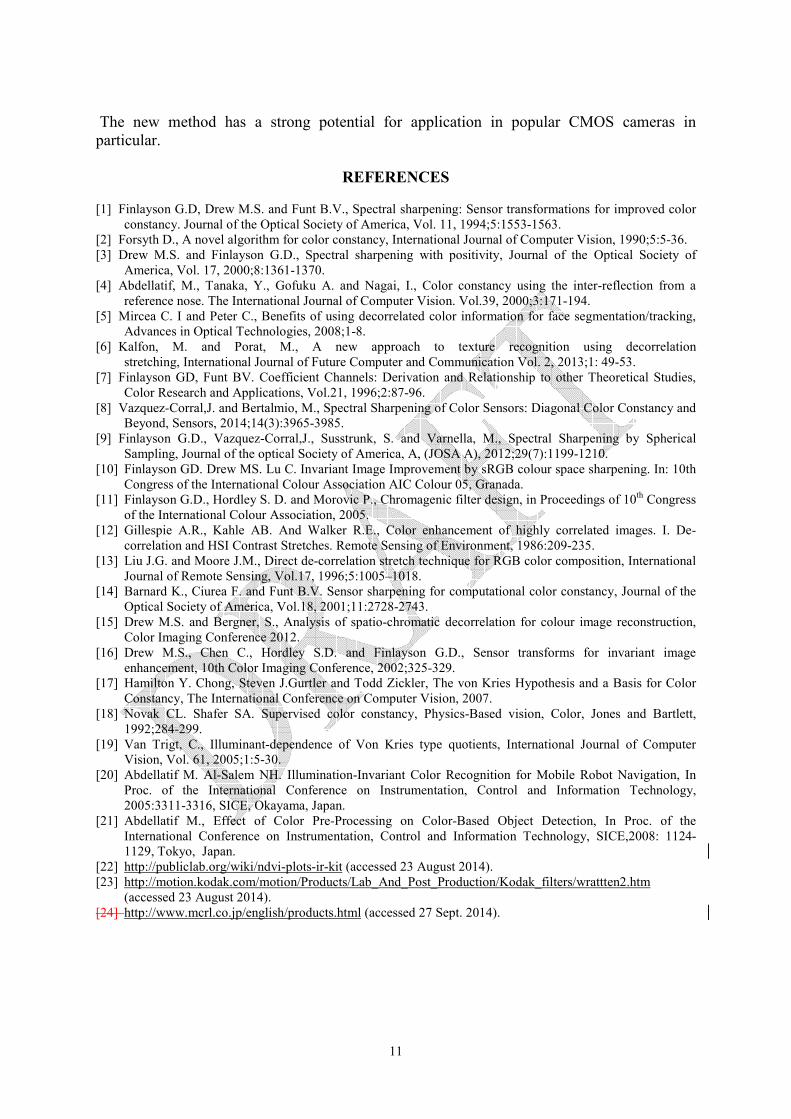
color-constancy preprocessing) or enhanced colors for display or printing. Figure 2 shows
color processes involving spectral sharpening. Fig.1 Response functions of spectrally a) overlapping, b) disjoint filters, and c) sharpening concept.
Fig.2. Color processes and applications.
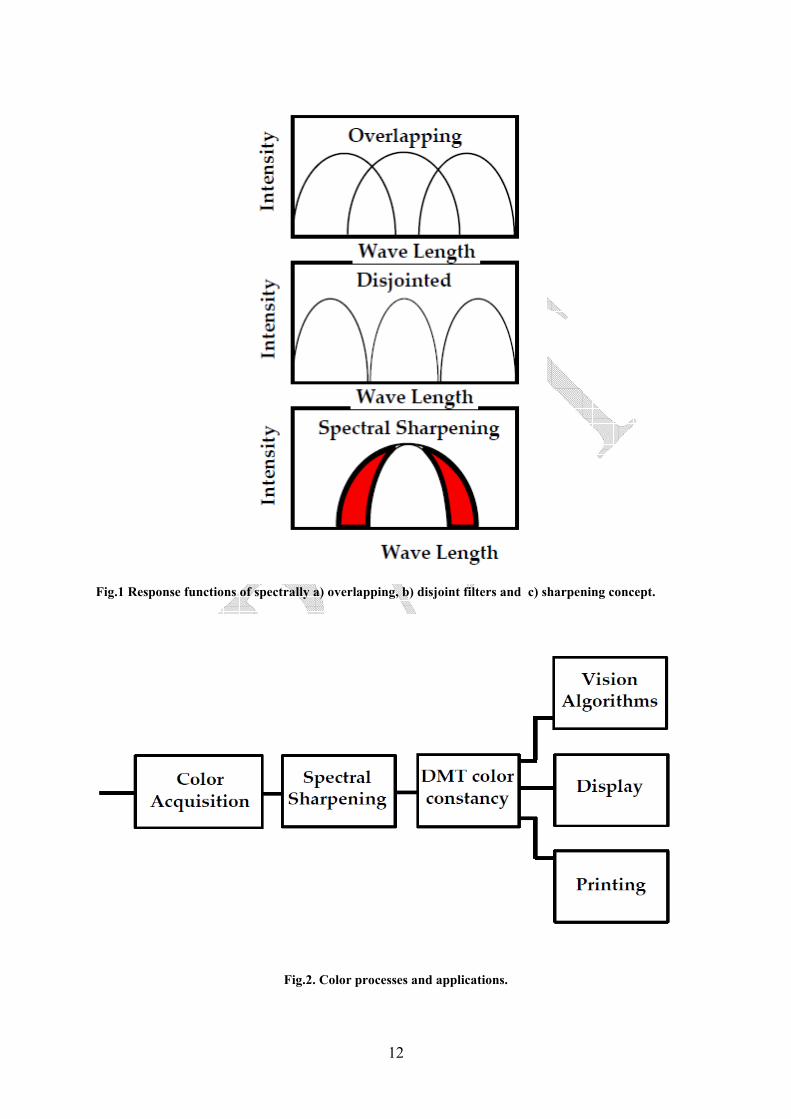
Fig.3. Definition of color accuracy and precision.
Precision and accuracy are two important color constancy evaluation metrics as reported in
[4] and illustrated in Fig.3, where accuracy expresses the proximity of measurement to the
true value, while precision is the repeatability of the measurement. Precision describes the
color vector variance against changes of the illumination color, while accuracy cares about
the quality of the stabilized color and measures its closeness to a canonical interpretation of
the color. Color constancy is classically evaluated through color precision when illumination
color is changed in the scene. This paper introduces the term “Precision” to describe the
commonly used metric to evaluate color constancy. In fact most color constancy work use
precision metric without naming it explicitly as “precision” [1]. It was shown in [4] that while
colors can be mapped to a very precise but wrong color, this is surely not the objective of
color constancy. We argue that color constancy evaluation should consider both precision and
2
distinction as well. Distinction is defined here as the variance of color vector responses from
the mean (not through illumination color variation) normalized by the color vector length.
Distinction here will be used instead of accuracy, since it is the needed visual function from
accurate colors. Therefore, we will evaluate color constancy through both “precision and
distinction,” rather than the current wisdom of considering “precision” only.
Using spectral sharpening had been reported in the literature [5, 6] to improve the image
segmentation by up to 7% [5]. Other applications include display enhancement, using color
for detecting objects such as the human face [5].
The objective of increasing color distinction will be defined as to increase the color vector
variance and hence color differences in the image to the extent that can be related to real
color physics, or in other words, that can be obtained by another set of real filters. The need
for spectral sharpening is strong, in particular for ubiquitous CMOS cameras, where the
potential of spectral sharpening can be well exploited, since their sensors have significant
spectral overlap.
Several spectral sharpening methods were presented in the literature using various constraints
to derive the spectral sharpening matrix [1, 3, 7, and 8]. Finlayson [1] proposed three
methods for computing the sharpening matrix, namely, Sensor-Based, SB, Data-Based, DB,
and an optimal method. The SB technique requires knowledge of the camera sensor response
functions to derive the new filters, while the DB technique requires knowledge of the color
observations for a set of surface colors subject to two different illumination colors. The data-
based sharpening is based on minimizing the color-constancy errors when colors are mapped
to a canonical appearance through the DMT method. Further constraints on the dimensional
representation of surface and illuminant colors were used to reach an optimal solution. In
Finlayson’s work, color constancy was mainly evaluated through the precision metric. The
sharpening methods presented in [1] were reported to deliver negative color responses for
some image colors and were modified later to enforce positivity [3].
Spherical sampling was proposed as a tool to design the sharpened filters based on the human
cone characteristics [9]. Sharpening was also used to derive an invariant image in [10].
Another approach uses chromagenic cameras, where an extra filter is used to obtain a new
image, which gives illumination color clues when compared to the basic color image. The
camera was used to develop the chromagenic algorithm for illumination detection and to
solve for color constancy [11].
Decorrelation Stretching, DS, is widely used for multispectral image processing [12,13], and
considering it as a spectral sharpening technique, it is the only approach that considers color
distinction. In this method, principal component analysis is used to reduce the correlation
between color channels. The DS method improves color distinction, but the sharpening
transformation is not fixed, and varies depending on the image contents [13]. DS also
amplifies the color noise in the image severely. These problems are manifestations of the fact
that DS is purely mathematical and does not employ real physical constraints. The DS
method may be suitable for display enhancement, but not as a physical measurement tool,
since it goes far beyond the physical limits for spectral sharpening to increase visibility of
color differences, even though such differences do not exist in reality.
In this paper, we are inspired by the following argument: Suppose you wanted the camera
that behaved as though it had physical sensors inspired by filters that you have. This requires
constructing a mapping from images of a real camera to images that are like ones taken with
the filter inspired sensors. Then, we need to measure the effectiveness of sharpened sensors
which should tell us that the filter inspired sensors are good, and that the mapping is good.
3
In this article, we are going to introduce an experimental method to achieve this target. The
spectral overlap will be directly measured by using a set of user-selected and spectrally
disjoint filters, together with a gray reference multi-patch chart to obtain the spectral
sharpening transformation. We call this the “Filter-Chart“ method.
The new method is related to SB-sharpening [1] in the core idea, but differs in two aspects.
First, the new method does not require explicit knowledge of the camera sensor functions,
since this knowledge is implicitly exploited through the calibration process. Second, the new
sensor functions are selected by the user and are not virtual.
The work is also related to DB-sharpening; the difference is that DB method finds a
sharpening transformation that is optimized for better color mapping among illuminants and
hence improves precision, while the new method have a good compromise of both precision
and distinction through employing physical constraints.
The paper is arranged as follows: The next section presents briefly the problem formulation.
The new filter-chart (FC) sharpening method is then described in detail. Experiments on real
images and comparison to the DB method are then presented. The performance of the new
method working on real color images is then discussed and concluded.
PROBLEM FORMULATION
The color vector at a pixel can be modeled as (Boldface indicates vector quantities):
( ) ( ) ( )∫= λλλλ dFSEii
...op , (1)
where ( )λE is the incident radiation to the surface, ( )λS is the surface reflectance function,
( )λiF is the spectral response function of the ith sampling filters, λ is the wavelength of light,
superscript o refers to original,
op is the measured color vector with three entries each
corresponding to one filter. The colors are usually corrected in color-constancy algorithms
using a diagonal matrix D, as follows: o
pp .Dc = , (2)
where D is the diagonal matrix whose elements are the correction coefficients for
independent color channels, and the superscript c refers to the corrected colors.
The concept of spectral sharpening aims to perform a linear transformation of colors prior to
correction, so that the diagonal correction works better using the formula o
pp ..TDsc = , (3)
where T is the sharpening matrix, and the superscript sc
refers to sharpened and then corrected
colors.
FC SPECTRAL SHARPENING CALIBRATION
The camera calibration setup consists of the chart of 11 reference patches. Kodak Wratten
filters No. 25 (red), 58 (green), and 47 (blue) are inserted in front of the camera during
calibration. These filters are selected as reference, since they have little spectral overlap and
are responsive only to the visible spectrum. It should be noted that the new filters should be
selected to cover the whole visible spectrum without gaps to be able to represent as many
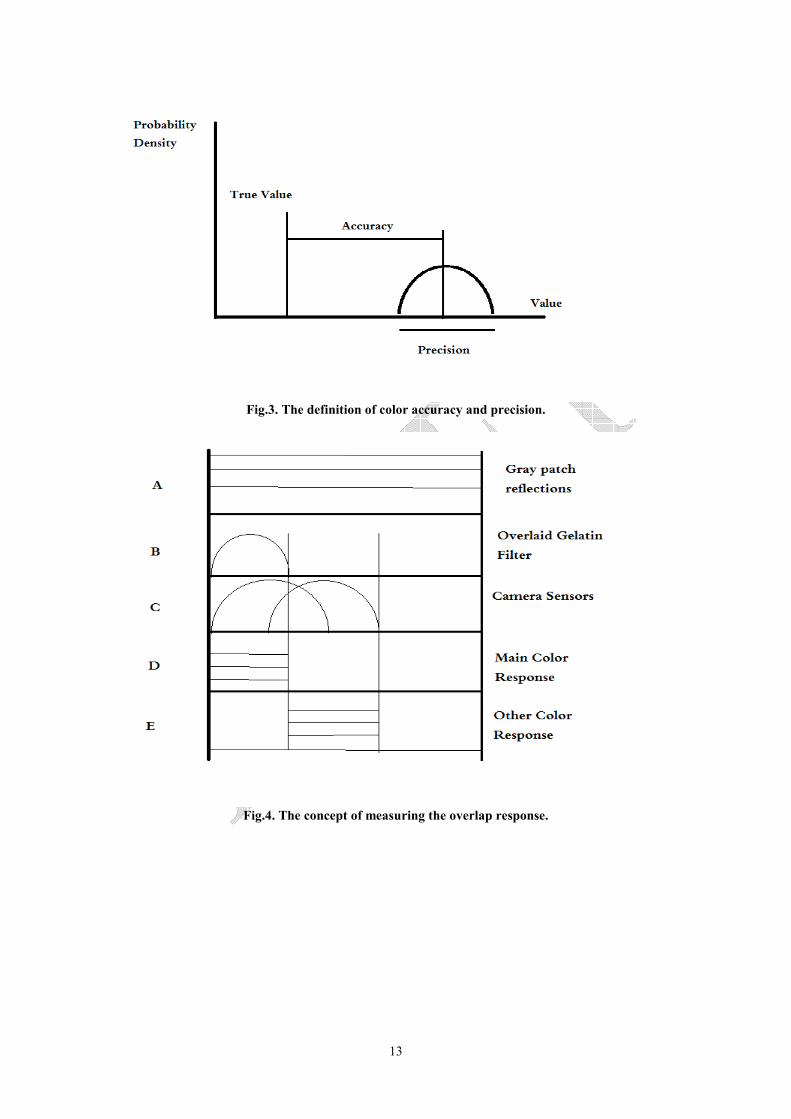
colors as possible. Fig.4. Concept of measuring the overlap response.
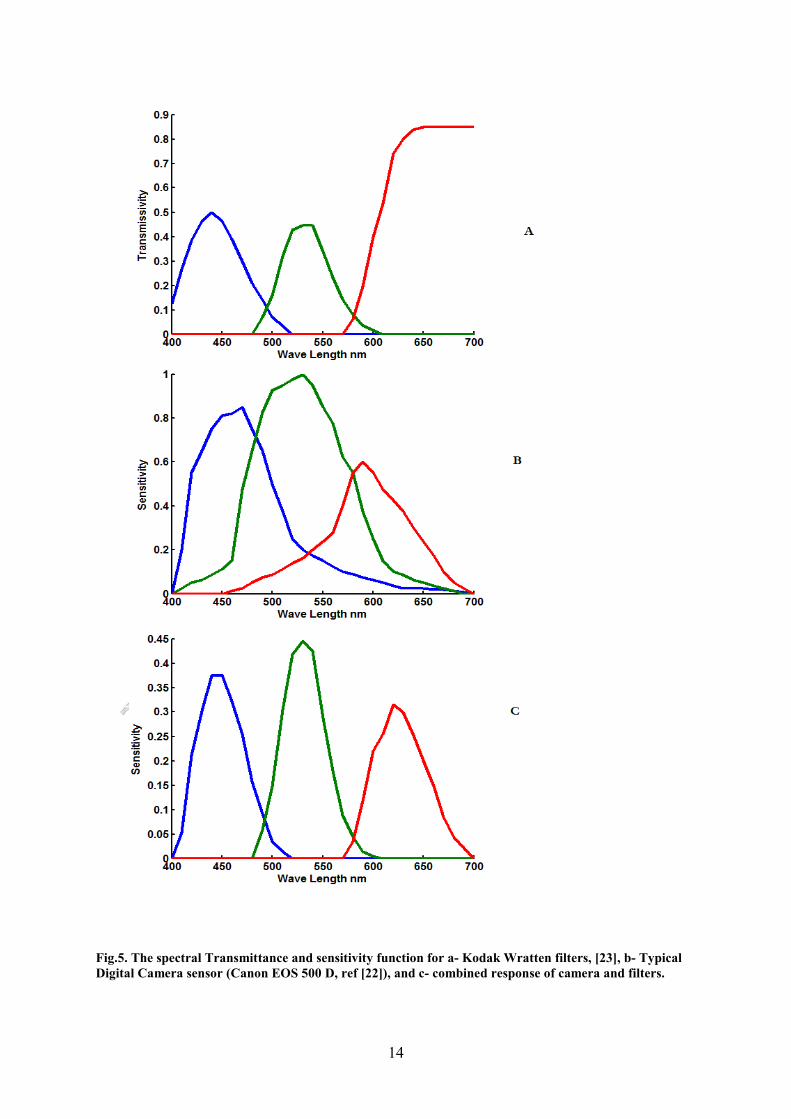
Fig.5. The spectral Transmittance and sensitivity function for A- Kodak Wratten filters, [23], B- Typical
Digital Camera sensor (Canon EOS 500 D, ref [22]), and C- combined response of camera and filters.
Table I. Sample color responses when using color filters
4
The concept of measuring the spectral overlap can be explained through considering two
simple overlapping filters (only two filters just for explanation, but they are really three) as
shown in Fig.4.
When observing a gray patch, the spectrum input to both sensors is spectrally flat as shown in
Fig.4.a. To separate them spectrally means that we need to assign a spectral range for each,
such that they do not overlap (imagine this is to be done by adding a vertical line between
them). When they are overlapping, each one responds to a region of the other and collects
response from it. Then, to remove the overlap, we will overlay a real filter, which responds,
for example, to the spectral range of the left sensor. This incoming reflection is filtered by
Gelatin filter as in Fig.4.b, which only let go spectrum according to its response function. The
input spectrum is then sampled through the camera filters shown in Fig.4.c. This spectrum
will be sampled into different responses in the main filter colors as shown in Fig.4.d, and will
also have responses in other color channels. Then, we measure the response from both
sensors: the left one’s response is within the limits. The response from the right sensor in this
case represents its overlap with the main filter, and the response should exactly be discounted
from the right sensor response to obtain its response in its own spectral range only. The
response from the other channel in this case represents its overlap with the main filter, and
their response should exactly be discounted from the right sensor response to obtain its
response in its own spectral range only. It is assumed that color channels are not saturated,
and therefore, the imaging model is valid.
In Fig.5A, the transmittance of the selected Kodak Wratten filters are shown, and the spectral
sensitivity of a typical Digital camera (Canon EOS 500 D, ref [22]), where we can observe
significant filter spectral overlap, and C- the combined response of the camera and filters. It
is clear that adding the filters forces filter to be spectrally disjoint. In fact we wish to see
image colors as if captured by sensors with sensitivity functions as that of Fig.5.C.
We observe several gray patches with different intensities in a chart containing reference gray
patches of different intensities supplied by Murakami Color Research Laboratory, Tokyo,
Japan, 1995, chart type GS-2L [24]. The responses of each two colors, R–G, R–B, and G–B,
are plotted in Fig.6, and then the slopes of the lines are computed. The three darkest gray
patches were excluded because of noisy response and camera nonlinearity in this region of
the curve. The overlap is the color response itself in Fig.6. This overlap is quantified, relative
to the main color response to compute the entries of the sharpening matrix.
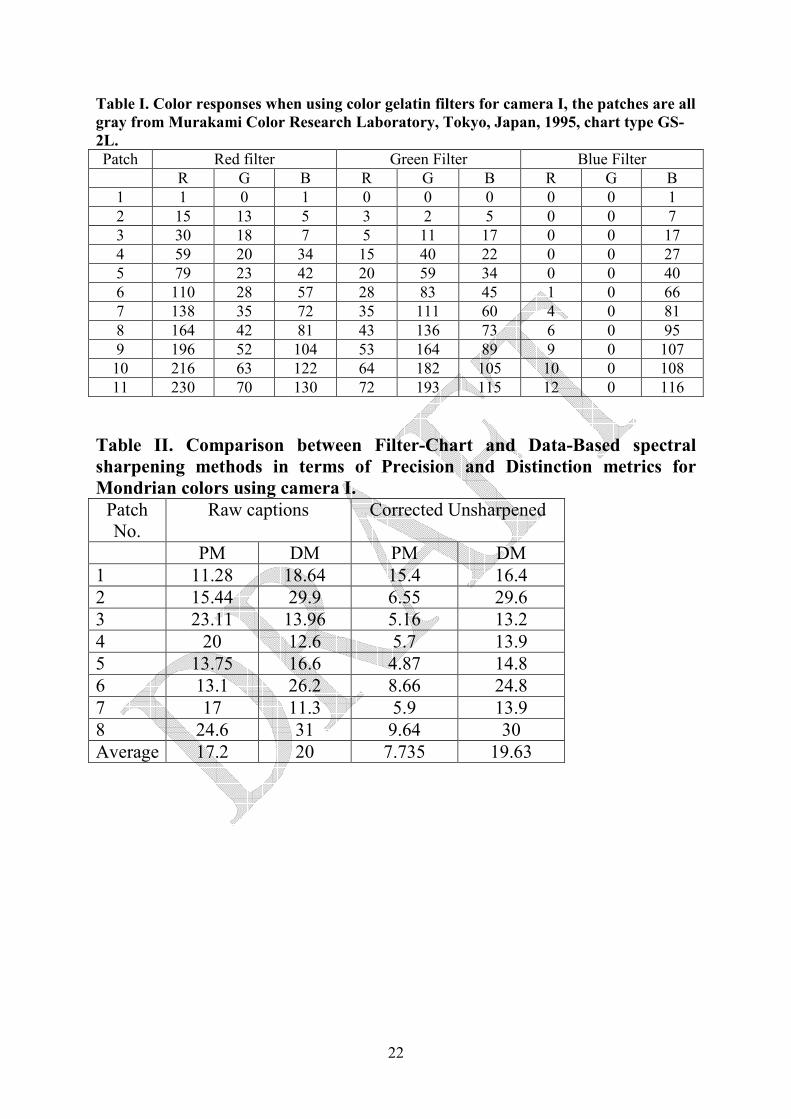
Table I shows the responses of the reference patches when viewed through the filters for
camera number I (Toshiba Satellite M645-S4110 laptop computer camera). A disjoint camera
sensor is expected to respond only in one color channel and should not respond in other
channels. This case is observed for the blue filter case, where there are almost no responses in
the red and green channels. This clearly means that both red and green sensors never gain
response from the band of the blue filter.
For the green color, it can be observed that the blue channel has significant response, which
means that the blue channel receives input in the green filter band. If we can discount this
blue filter response, then we are sure that the blue response comes only from its blue band
and contains no input from the green. This is our basic physical concept for spectral
sharpening.
It can also be observed that both the green and the blue channels respond in the red filter
case. These responses weaken the main color saturation, and it is required to reduce the color
responses other than the main. In the new method, this response will be quantified relative to
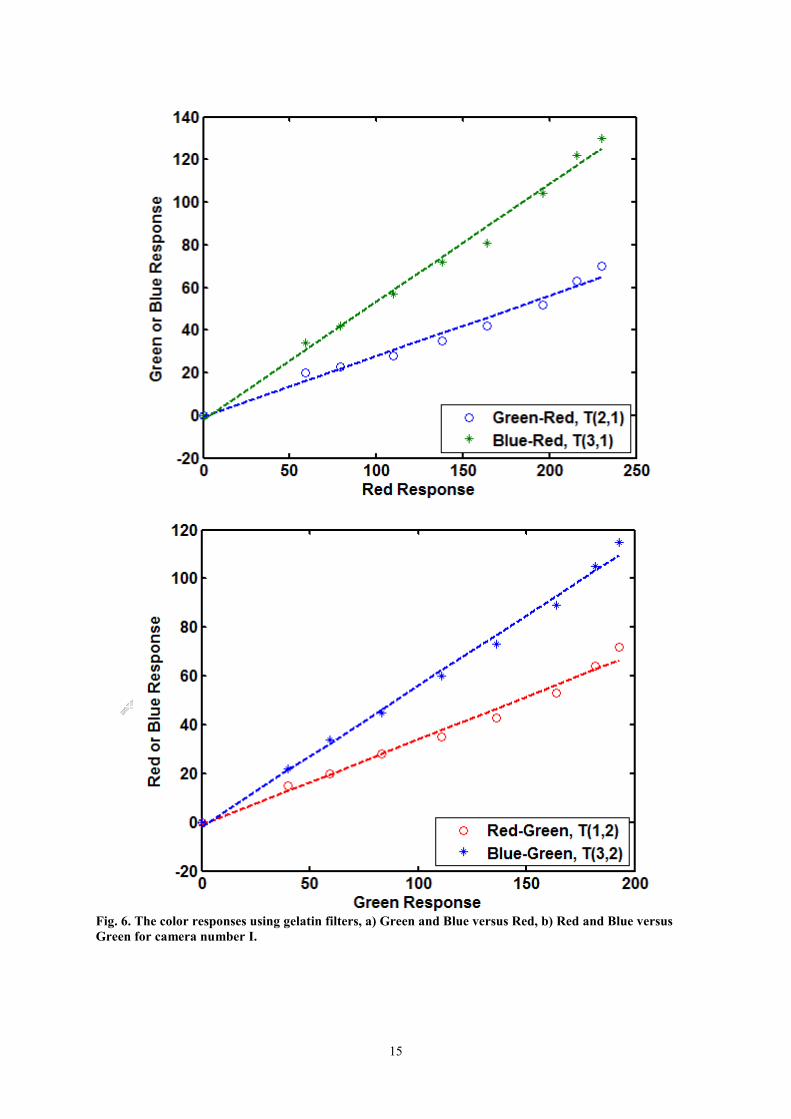
the main color response and discounted from the color channels. Fig. 6. Color responses using gelatin filters, the sensor responses are registered while gelatin filter is held
in front of the camera, a) Green and Blue versus Red, b) Red and Blue versus Green for camera I.
We will now describe the method of computing the entries of the spectral sharpening matrix.
5
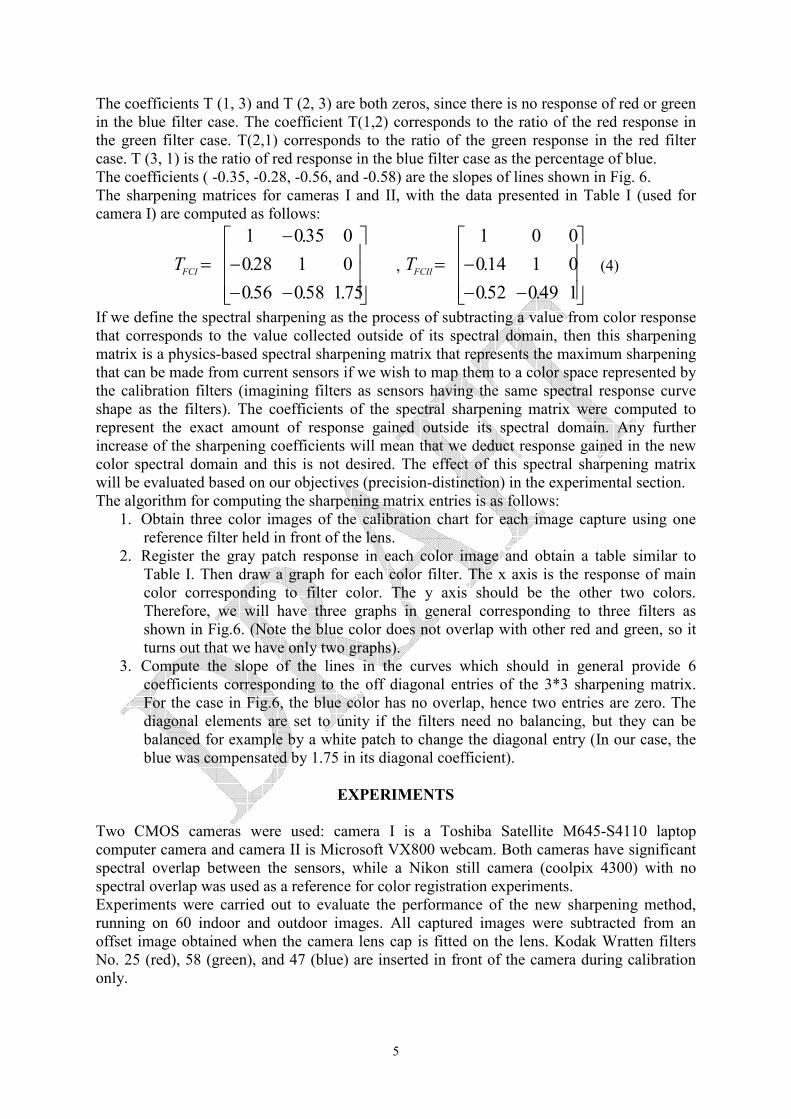
The coefficients T (1, 3) and T (2, 3) are both zeros, since there is no response of red or green
in the blue filter case. The coefficient T(1,2) corresponds to the ratio of the red response in
the green filter case. T(2,1) corresponds to the ratio of the green response in the red filter
case. T (3, 1) is the ratio of red response in the blue filter case as the percentage of blue.
The coefficients ( -0.35, -0.28, -0.56, and -0.58) are the slopes of lines shown in Fig. 6.
The sharpening matrices for cameras I and II, with the data presented in Table I (used for
camera I) are computed as follows:
−−
−
−
=
75.158.056.0
0128.0
035.01
FCIT ,
−−
−=
149.052.0
0114.0
001
FCIIT (4)
If we define the spectral sharpening as the process of subtracting a value from color response
that corresponds to the value collected outside of its spectral domain, then this sharpening
matrix is a physics-based spectral sharpening matrix that represents the maximum sharpening
that can be made from current sensors if we wish to map them to a color space represented by
the calibration filters (imagining filters as sensors having the same spectral response curve
shape as the filters). The coefficients of the spectral sharpening matrix were computed to
represent the exact amount of response gained outside its spectral domain. Any further
increase of the sharpening coefficients will mean that we deduct response gained in the new
color spectral domain and this is not desired. The effect of this spectral sharpening matrix
will be evaluated based on our objectives (precision-distinction) in the experimental section.
The algorithm for computing the sharpening matrix entries is as follows:
1. Obtain three color images of the calibration chart for each image capture using one
reference filter held in front of the lens.
2. Register the gray patch response in each color image and obtain a table similar to
Table I. Then draw a graph for each color filter. The x axis is the response of main
color corresponding to filter color. The y axis should be the other two colors.
Therefore, we will have three graphs in general corresponding to three filters as
shown in Fig.6. (Note the blue color does not overlap with other red and green, so it
turns out that we have only two graphs).
3. Compute the slope of the lines in the curves which should in general provide 6
coefficients corresponding to the off diagonal entries of the 3*3 sharpening matrix.
For the case in Fig.6, the blue color has no overlap, hence two entries are zero. The
diagonal elements are set to unity if the filters need no balancing, but they can be
balanced for example by a white patch to change the diagonal entry (In our case, the
blue was compensated by 1.75 in its diagonal coefficient).
EXPERIMENTS
Two CMOS cameras were used: camera I is a Toshiba Satellite M645-S4110 laptop
computer camera and camera II is Microsoft VX800 webcam. Both cameras have significant
spectral overlap between the sensors, while a Nikon still camera (coolpix 4300) with no
spectral overlap was used as a reference for color registration experiments.
Experiments were carried out to evaluate the performance of the new sharpening method,
running on 60 indoor and outdoor images. All captured images were subtracted from an
offset image obtained when the camera lens cap is fitted on the lens. Kodak Wratten filters
No. 25 (red), 58 (green), and 47 (blue) are inserted in front of the camera during calibration
only.
6
The cameras were controlled during all experiments, so that the automatic white balance is
not activated. For outdoor captions, the blue color was saturated, and this complicated the
sharpening process, since it violates the assumption mentioned earlier. Therefore, the images
were balanced by changing the color temperature setting of manual white balance from 3000
K used for indoor to 6000 K to keep the original image colors within the sensor range.
Calibration was repeated after this change, and a new sharpening matrix was computed, but it
did not change significantly. It should be noted that the camera color should be linear and the
color vector should pass through the origin of RGB color space at (0,0,0) without offset,
which introduces serious errors when using diagonal transformations. Our cameras can be
approximated to be linear if we exclude the low-intensity region below 50. Therefore, the
regions were excluded, and the calibration was fitted to a line passing through the origin.
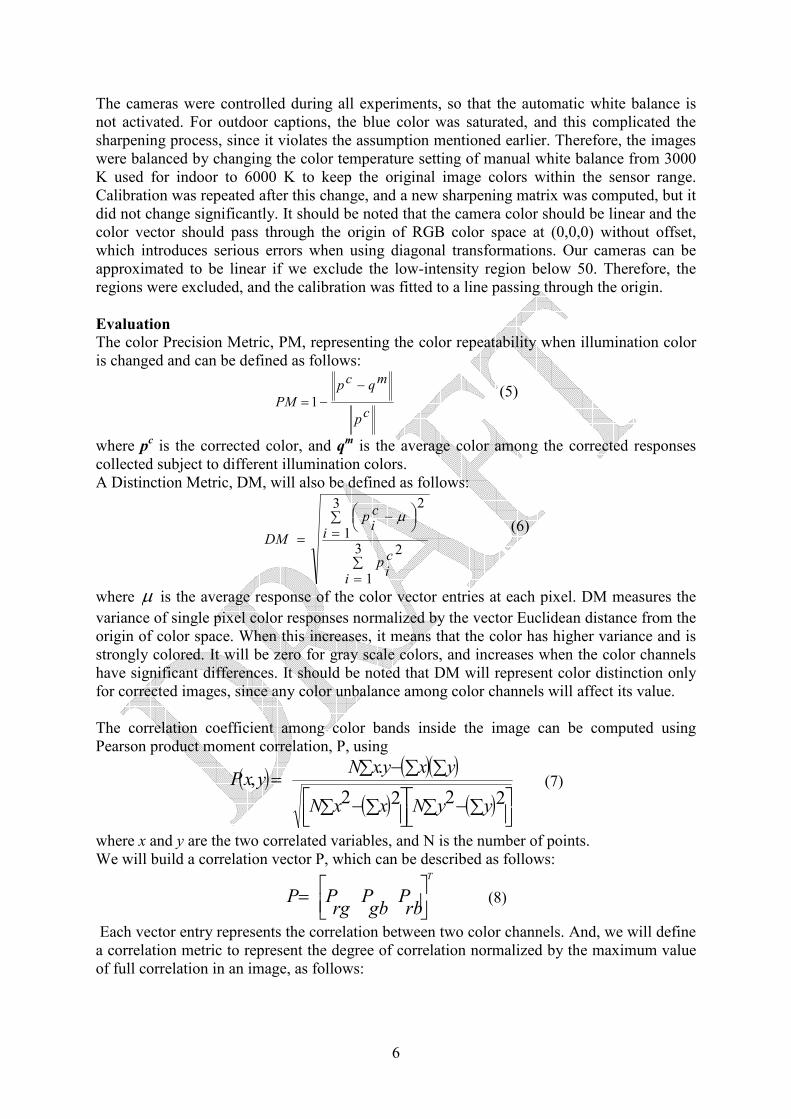
Evaluation
The color Precision Metric, PM, representing the color repeatability when illumination color
is changed and can be defined as follows:
cp
mqcp
PM
−−=1
(5)
where pc is the corrected color, and q
m is the average color among the corrected responses
collected subject to different illumination colors.
A Distinction Metric, DM, will also be defined as follows:
∑=
∑=
−
=3
1
2
3
1
2
i
ci
p
i
ci
p
DM
µ (6)
where µ is the average response of the color vector entries at each pixel. DM measures the
variance of single pixel color responses normalized by the vector Euclidean distance from the
origin of color space. When this increases, it means that the color has higher variance and is
strongly colored. It will be zero for gray scale colors, and increases when the color channels
have significant differences. It should be noted that DM will represent color distinction only
for corrected images, since any color unbalance among color channels will affect its value.
The correlation coefficient among color bands inside the image can be computed using
Pearson product moment correlation, P, using
( ) ( )( )
( ) ( )
∑ ∑−
∑ ∑−
∑ ∑∑−=
2222
.,
yyNxxN
yxyxNyxP (7)
where x and y are the two correlated variables, and N is the number of points.
We will build a correlation vector P, which can be described as follows: T
rbP
gbP
rgPP
= (8)
Each vector entry represents the correlation between two color channels. And, we will define
a correlation metric to represent the degree of correlation normalized by the maximum value
of full correlation in an image, as follows:
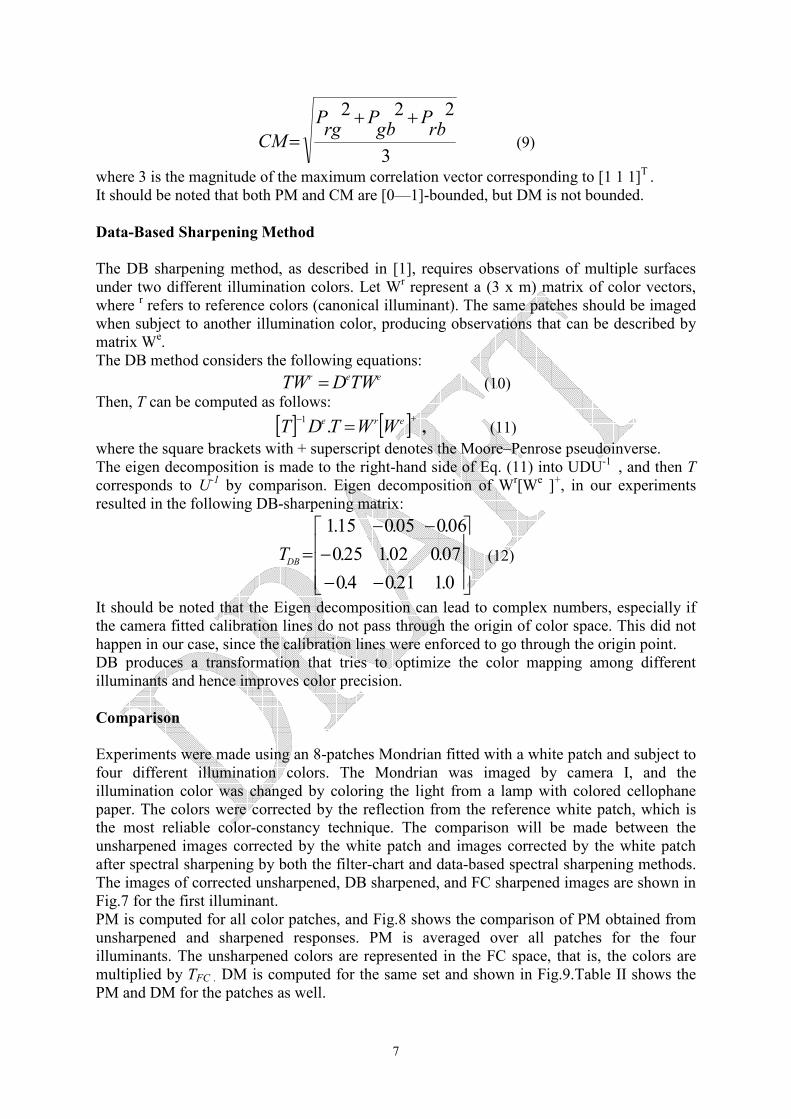
7
3
222rb
Pgb
Prg
P
CM
++= (9)
where 3 is the magnitude of the maximum correlation vector corresponding to [1 1 1]T
.
It should be noted that both PM and CM are [0—1]-bounded, but DM is not bounded.
Data-Based Sharpening Method
The DB sharpening method, as described in [1], requires observations of multiple surfaces
under two different illumination colors. Let Wr represent a (3 x m) matrix of color vectors,
where r refers to reference colors (canonical illuminant). The same patches should be imaged
when subject to another illumination color, producing observations that can be described by
matrix We.
The DB method considers the following equations: eer TWDTW = (10)
Then, T can be computed as follows:
[ ] [ ]+− = ere WWTDT .1
, (11)
where the square brackets with + superscript denotes the Moore–Penrose pseudoinverse.
The eigen decomposition is made to the right-hand side of Eq. (11) into UDU-1
, and then T
corresponds to U-1
by comparison. Eigen decomposition of Wr[W
e ]
+, in our experiments
resulted in the following DB-sharpening matrix:
−−
−
−−
=
0.121.04.0
07.002.125.0
06.005.015.1
DBT (12)
It should be noted that the Eigen decomposition can lead to complex numbers, especially if
the camera fitted calibration lines do not pass through the origin of color space. This did not
happen in our case, since the calibration lines were enforced to go through the origin point.
DB produces a transformation that tries to optimize the color mapping among different
illuminants and hence improves color precision.
Comparison
Experiments were made using an 8-patches Mondrian fitted with a white patch and subject to
four different illumination colors. The Mondrian was imaged by camera I, and the
illumination color was changed by coloring the light from a lamp with colored cellophane
paper. The colors were corrected by the reflection from the reference white patch, which is
the most reliable color-constancy technique. The comparison will be made between the
unsharpened images corrected by the white patch and images corrected by the white patch
after spectral sharpening by both the filter-chart and data-based spectral sharpening methods.
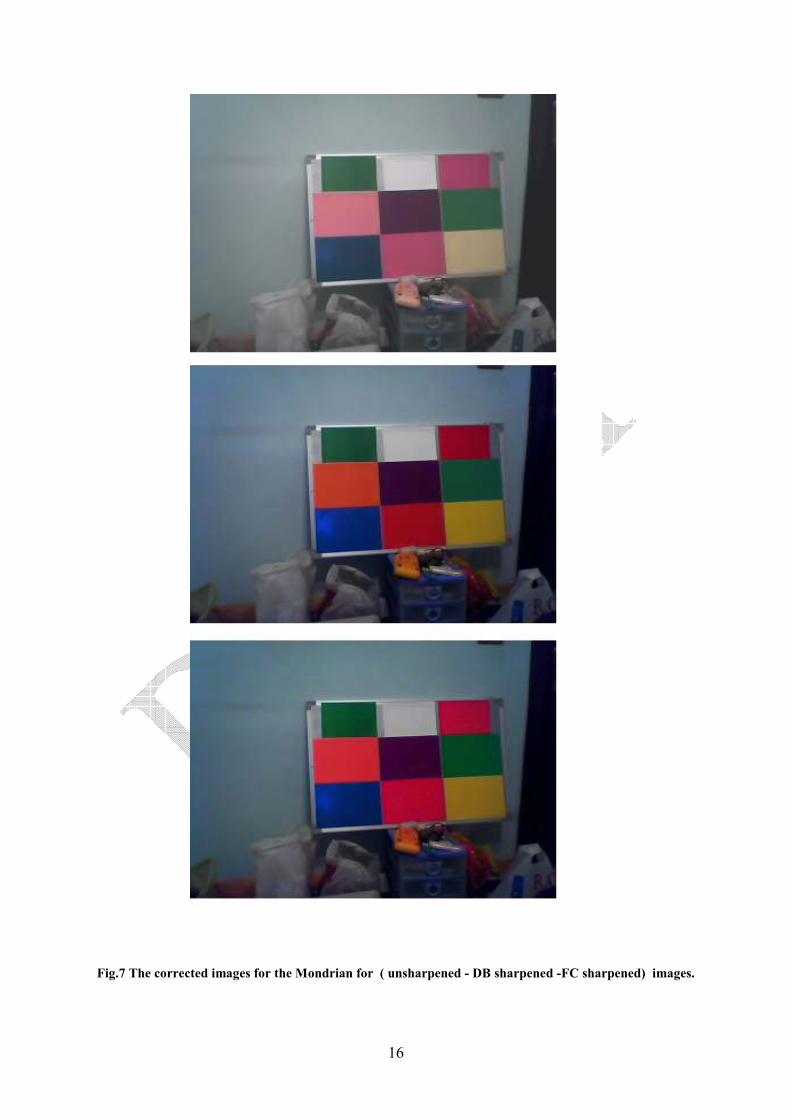
The images of corrected unsharpened, DB sharpened, and FC sharpened images are shown in
Fig.7 for the first illuminant.
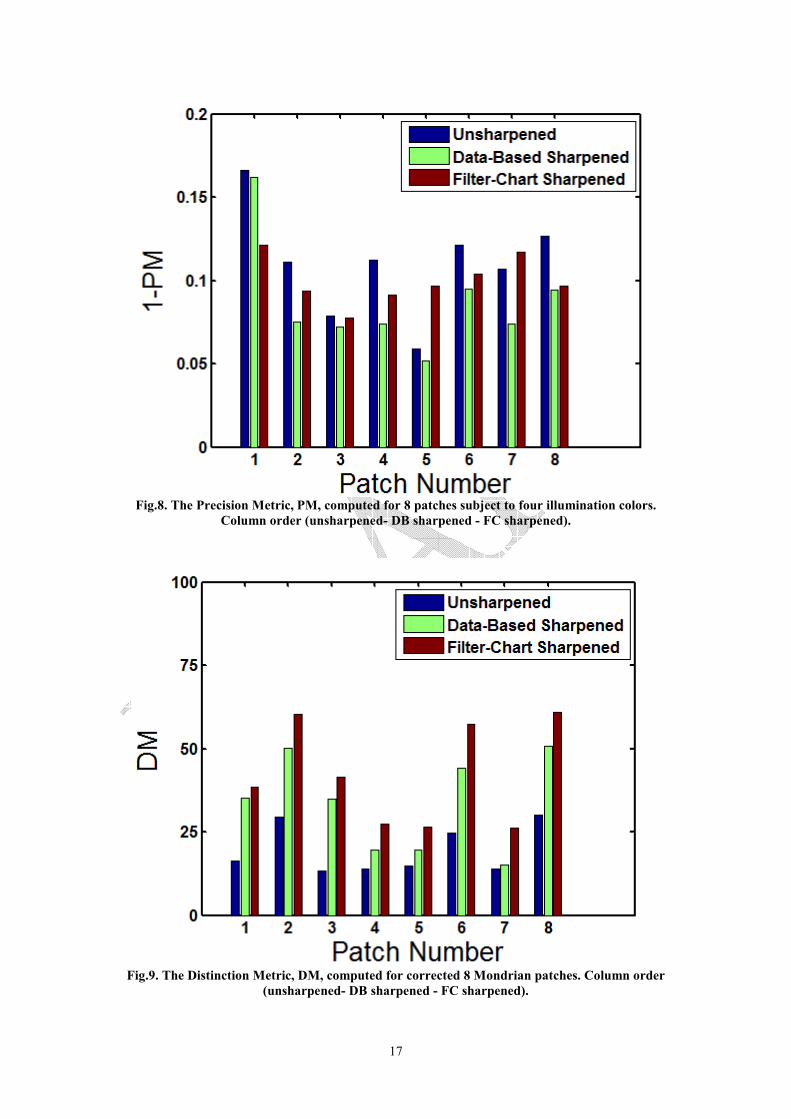
PM is computed for all color patches, and Fig.8 shows the comparison of PM obtained from
unsharpened and sharpened responses. PM is averaged over all patches for the four
illuminants. The unsharpened colors are represented in the FC space, that is, the colors are
multiplied by TFC . DM is computed for the same set and shown in Fig.9.Table II shows the
PM and DM for the patches as well.

8
We can observe that spectral sharpening decreases the precision errors, PM whether done by
the DB or FC methods. The precision errors are on the average of 11 % when represented in
the FC space, but it is 7.735 when represented in the original color space. This is surprising,
because the precision errors are increased by spectral sharpening if each is represented in its
own color space. The results reported in [1] were compared in the unsharpened sensors space.
In our own view, the comparison should be made with reference to new sharpened colors,
since they are the colors we will deal with in further applications. The second reason is that
using real images colors, some colors provide low response, which is a nonlinear region in
most cameras, and this will be the prevailing case, since sharpening will make some color
responses to decrease, while others increase. We also observe that the average PM is almost
the same for both the DB and FC methods. FC results have higher DM, which is a result of
stronger sharpening.
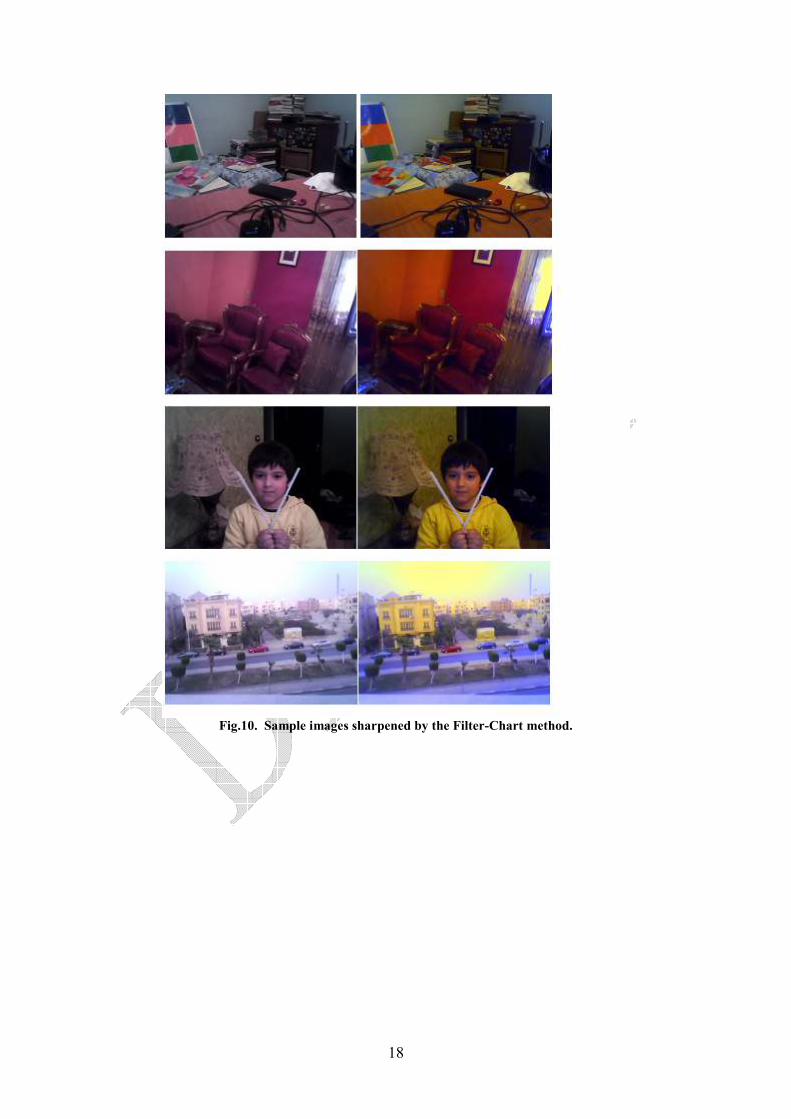
Several experiments were made to apply the FC sharpening method to real indoor and
outdoor images. Sample sharpened images are shown in Fig.10, captured by camera II, where
the left side shows original images and the right shows sharpened images. The first three
images show indoor scene, while the third shows an outdoor scene. The sharpened colors are
consistent with what was realized by human observers as color names. For example, the
orange patch in the first image, the red and orange wall colors in the second image; the shirt
and the skin color of the third image is more saturated and is consistent with the perceived
colors in reality. The outdoor image also shows original building color and strong red car
color.
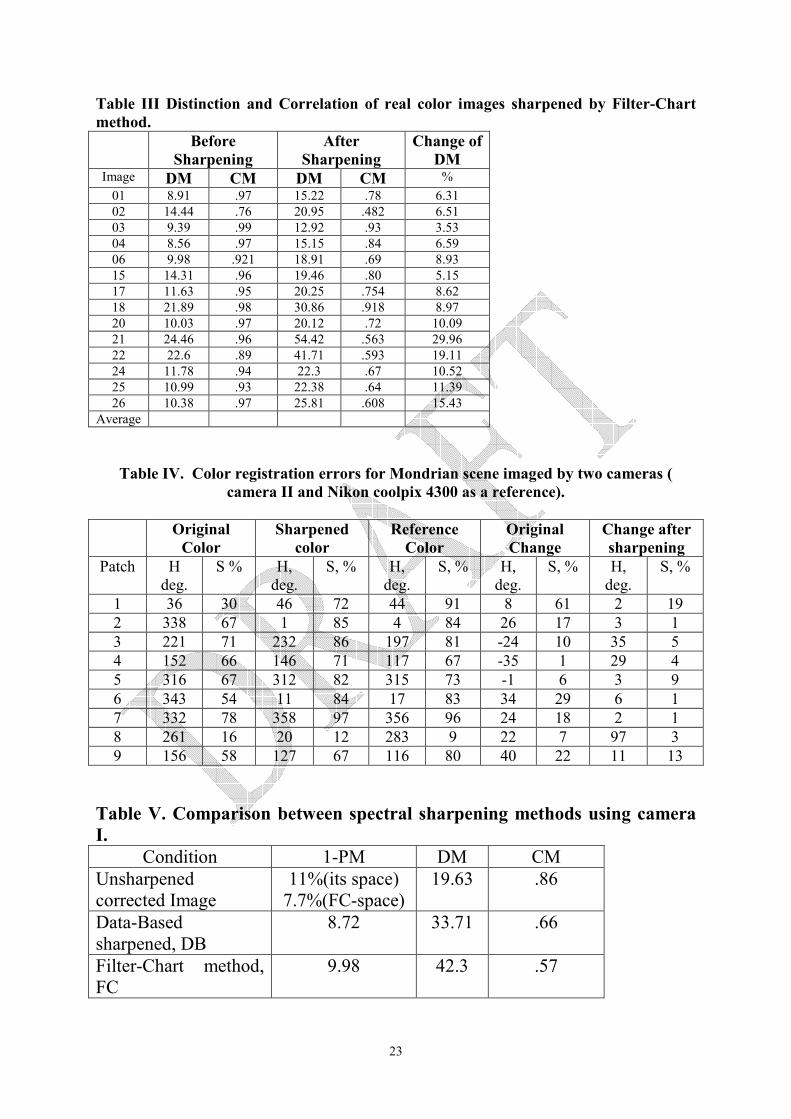
DM and CM were measured for unsharpened and FC-sharpened images, and the results are
summarized in Table III. It can be observed that sharpened color images have higher DM and
lower CM. The highest distinction metric is produced by the FC method.
Fig.7 The corrected images for the Mondrian ( unsharpened–DB-sharpened–FC-sharpened) images.
Fig.8. The Precision Metric, PM, computed for 8 patches subject to four illumination colors.
Column order (unsharpened–DB-sharpened–FC-sharpened).
Fig.9. The Distinction Metric, DM, computed for corrected 8 Mondrian patches. Column order
(unsharpened–DB-sharpened–FC-sharpened).
Table II. Comparison between spectral sharpening methods in terms of PM and DM.
Fig.10. Sample images sharpened by the FC method.
Table III Distinction and Correlation of real color images sharpened by FC method.
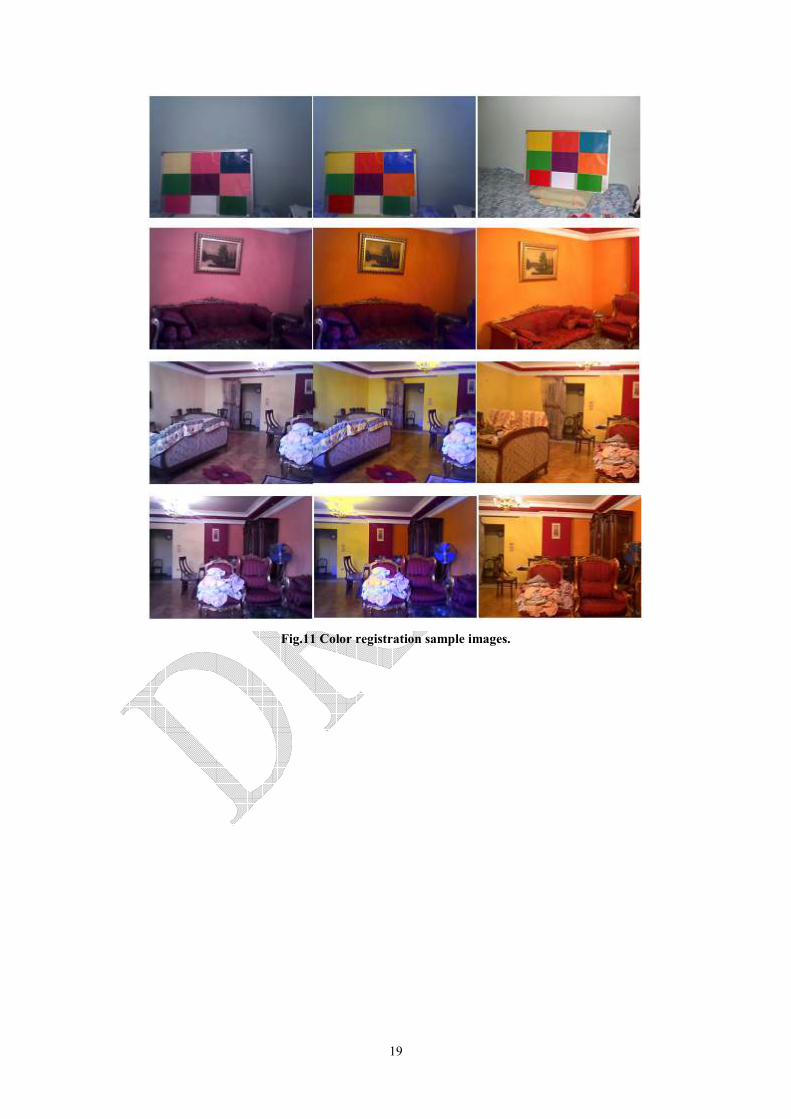
Registration
One interesting application for color spectral sharpening is color registration among different
cameras. We conducted experiments to compare colors captured by camera II and Nikon
coolpix 4300 camera as a reference. Figure 11 shows sample indoor images arranged
horizontally as original, FC-sharpened, and reference colors. It is clear that both sharpened
and reference colors are close to each other, compared to the original colors. Table IV
summarizes the registration errors for the color patches shown in the Mondrian image of
Fig.11.a. The table shows the hue and saturation for each color patch as measured by camera
II in the original, sharpened colors, and the colors from the reference camera. The HIS system
is used in this comparison, since it is perceptually uniform and convenient for human users.
The HIS parameters can be computed from RGB as follows:
( )
−−
−=
)2(
3arctan
BGR
BGH ,
( )
−=I
BGRS
,,min1 , 3/)( BGRI ++= (13)
It is clear from the table that the color registration error is reduced for the sharpened colors,
and the effect is significant for the orange and yellow colors in particular. The same effect
was observed in other images of indoor scenes.
9
Fig.11. Color registration sample images.
Table IV. Color registration error for Mondrian scene.
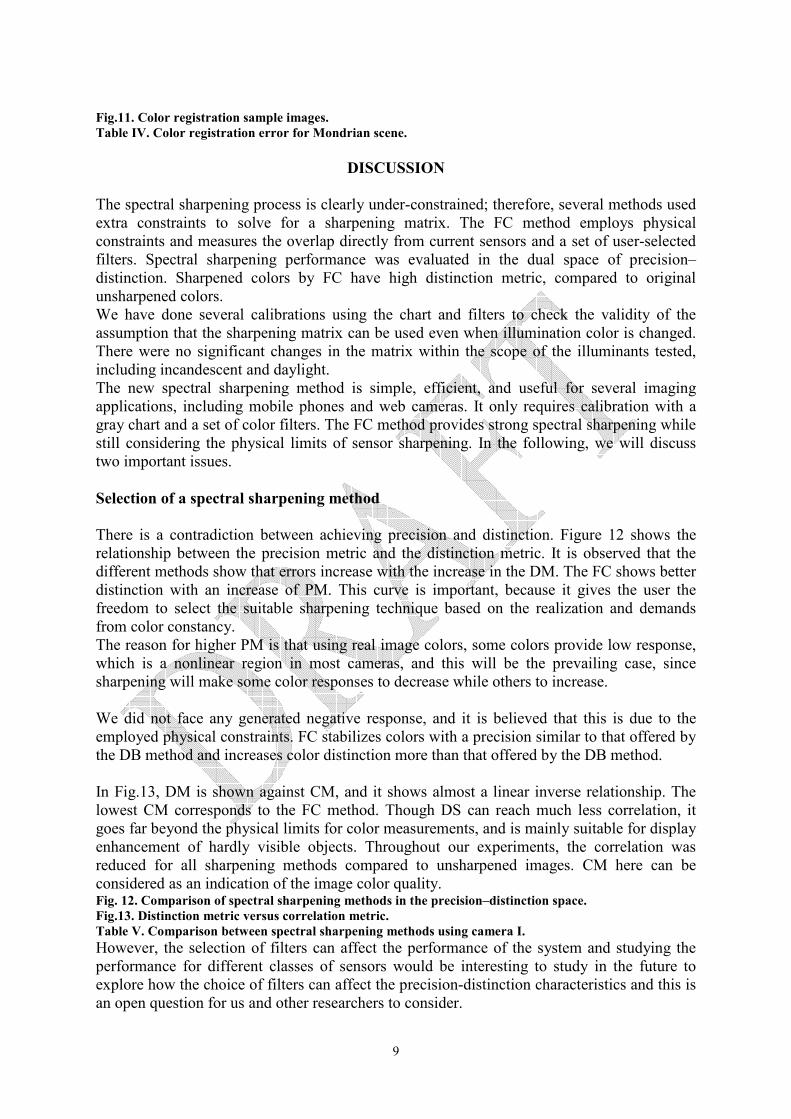
DISCUSSION
The spectral sharpening process is clearly under-constrained; therefore, several methods used
extra constraints to solve for a sharpening matrix. The FC method employs physical
constraints and measures the overlap directly from current sensors and a set of user-selected
filters. Spectral sharpening performance was evaluated in the dual space of precision–
distinction. Sharpened colors by FC have high distinction metric, compared to original
unsharpened colors.
We have done several calibrations using the chart and filters to check the validity of the
assumption that the sharpening matrix can be used even when illumination color is changed.
There were no significant changes in the matrix within the scope of the illuminants tested,
including incandescent and daylight.
The new spectral sharpening method is simple, efficient, and useful for several imaging
applications, including mobile phones and web cameras. It only requires calibration with a
gray chart and a set of color filters. The FC method provides strong spectral sharpening while
still considering the physical limits of sensor sharpening. In the following, we will discuss
two important issues.
Selection of a spectral sharpening method
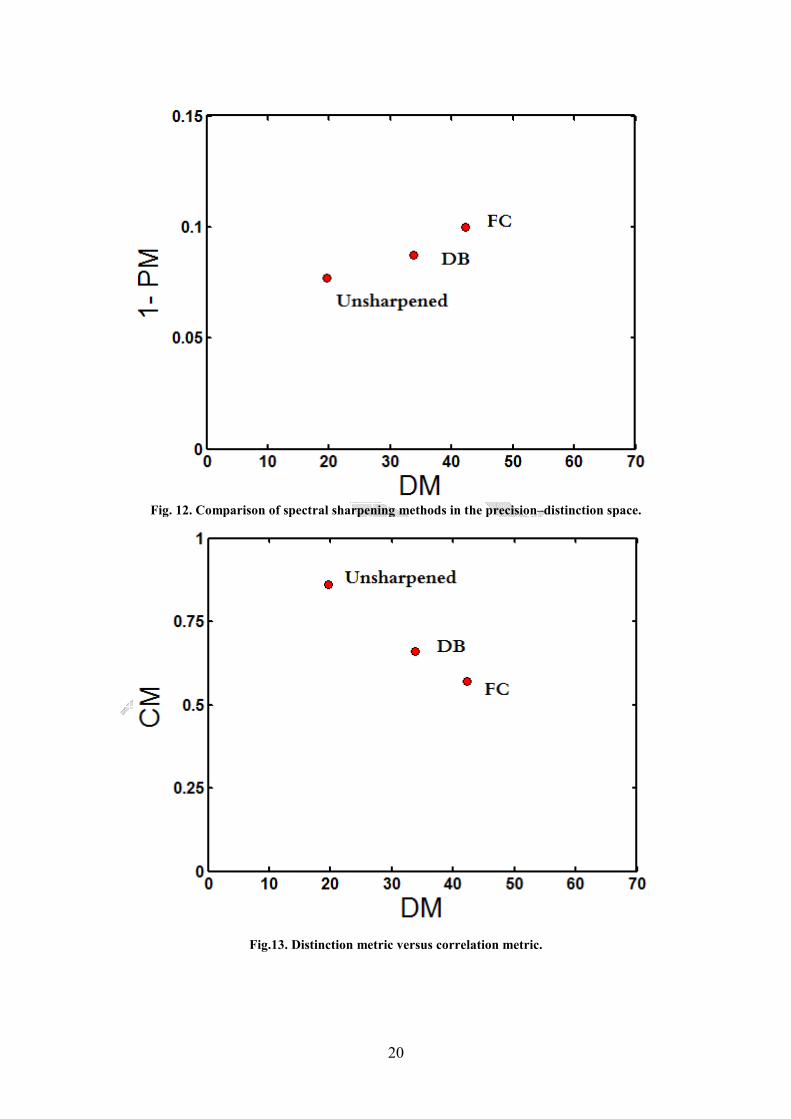
There is a contradiction between achieving precision and distinction. Figure 12 shows the
relationship between the precision metric and the distinction metric. It is observed that the
different methods show that errors increase with the increase in the DM. The FC shows better
distinction with an increase of PM. This curve is important, because it gives the user the
freedom to select the suitable sharpening technique based on the realization and demands
from color constancy.
The reason for higher PM is that using real image colors, some colors provide low response,
which is a nonlinear region in most cameras, and this will be the prevailing case, since
sharpening will make some color responses to decrease while others to increase.
We did not face any generated negative response, and it is believed that this is due to the
employed physical constraints. FC stabilizes colors with a precision similar to that offered by
the DB method and increases color distinction more than that offered by the DB method.
In Fig.13, DM is shown against CM, and it shows almost a linear inverse relationship. The
lowest CM corresponds to the FC method. Though DS can reach much less correlation, it
goes far beyond the physical limits for color measurements, and is mainly suitable for display
enhancement of hardly visible objects. Throughout our experiments, the correlation was
reduced for all sharpening methods compared to unsharpened images. CM here can be
considered as an indication of the image color quality. Fig. 12. Comparison of spectral sharpening methods in the precision–distinction space.
Fig.13. Distinction metric versus correlation metric.
Table V. Comparison between spectral sharpening methods using camera I.
However, the selection of filters can affect the performance of the system and studying the
performance for different classes of sensors would be interesting to study in the future to
explore how the choice of filters can affect the precision-distinction characteristics and this is
an open question for us and other researchers to consider.
10
Color-sampling system design issue
The issue of color sampling system design is clear in this research. The method presented
here depends on the user’s good selection of filters. The design of color-sampling system
should consider achieving good results for mapping colors between illuminants and keeping
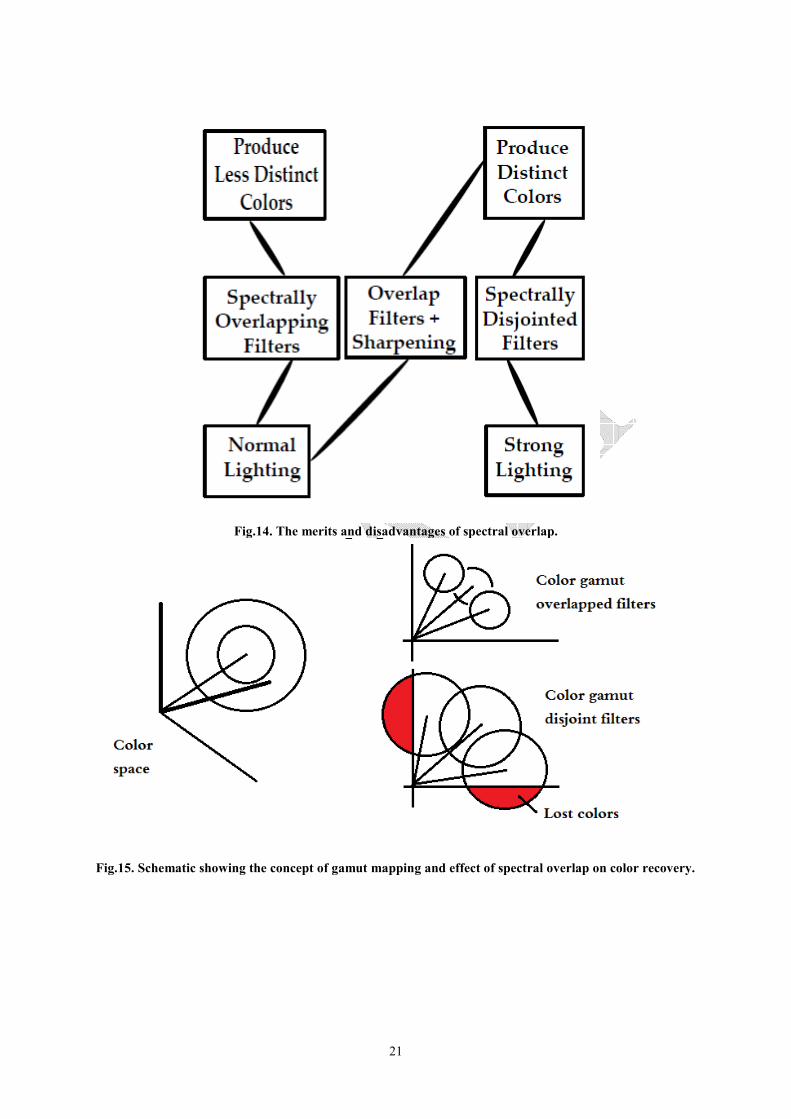
the color with high DM as well. The two criteria are contradicting. Referring to Fig.14, it
seems a good choice to acquire colors with overlapping filters and then sharpen them
spectrally to have good and strong colors. The ability to map colors between illuminants
requires that responses be of sufficient magnitudes to avoid noisy measurements in low-
response color channels. If the colors are sampled through sharp sensors at the beginning, the
precision will be low, because of the higher effect of noise. If the overlapping filters give
significant responses, they can be later separated, if the right transformation exists.
Stabilizing color is important, but not into weak colors. If there is a compromise between
color precision and color distinction, the choice should be made clear and available for the
user. There is an inverse relationship between color distinction and the level of color
precision. The relationship leads to a compromise between color strength and its precision.
This compromise can be controlled through the design of spectral sharpening transformation. Fig.14. Merits and disadvantages of spectral overlap.
Fig.15. Schematic showing the concept of gamut mapping and the effect of spectral overlap on color
recovery.
Since correlation between colors is perfect for a gray-scale image, spectral overlap causes
image colors to appear near-to-gray and lose their saturation. Spectral sharpening reduces the
spectral overlap, so that colors are less correlated to each other and appear more distinct.
If we imagine color gamut as a sphere in color space, as shown in Fig.15, then the
illumination color changes have the effect of skewing the vector connecting the origin with
the sphere center. Spectral filter overlap reduces the sphere radius. The overlap is useful in
the sense that when the vector is skewed, fewer colors are lost by collision with the walls of
the color space. If we want colors to be mapped without loss, we need the sphere radius to be
small. While on the other hand, we need large radius to increase the color distinction.
Therefore, it is useful to capture colors at reduced radius and then expand the sphere later by
spectral sharpening. It would be useful for the vision system if it can control the strength of
the spectral sharpening matrix to serve its visual needs. For example, in color blindness tests,
we need color distinction, the most compared to precision needs, which may be important to
recognize objects at different times.
CONCLUSIONS
A new experimental technique was introduced to compute the spectral sharpening matrix by
observing a reference chart with a set of user-selected filters. The calibration enabled
measuring the spectral overlap, and hence it can be discounted from the colors. Using this
method, it will be possible to sharpen colors obtained by a camera sensor without knowing
the camera sensor spectral response functions.
Experiments showed that the filter-chart spectral sharpening increased color distinction
significantly and reduced the color precision errors while maintaining the color’s physical
relation to the scene. The following can be concluded from this paper:
1- Color spectral sharpening would better be evaluated in view of both color precision
and color distinction, since there is a contradiction between the two tasks.
2- The new FC method produces high color distinction and a good level of color
precision, slightly higher than that offered by the data-based sharpening method.
11
The new method has a strong potential for application in popular CMOS cameras in
particular.
REFERENCES
[1] Finlayson G.D, Drew M.S. and Funt B.V., Spectral sharpening: Sensor transformations for improved color
constancy. Journal of the Optical Society of America, Vol. 11, 1994;5:1553-1563.
[2] Forsyth D., A novel algorithm for color constancy, International Journal of Computer Vision, 1990;5:5-36.
[3] Drew M.S. and Finlayson G.D., Spectral sharpening with positivity, Journal of the Optical Society of
America, Vol. 17, 2000;8:1361-1370.
[4] Abdellatif, M., Tanaka, Y., Gofuku A. and Nagai, I., Color constancy using the inter-reflection from a
reference nose. The International Journal of Computer Vision. Vol.39, 2000;3:171-194.
[5] Mircea C. I and Peter C., Benefits of using decorrelated color information for face segmentation/tracking,
Advances in Optical Technologies, 2008;1-8.
[6] Kalfon, M. and Porat, M., A new approach to texture recognition using decorrelation
stretching, International Journal of Future Computer and Communication Vol. 2, 2013;1: 49-53.
[7] Finlayson GD, Funt BV. Coefficient Channels: Derivation and Relationship to other Theoretical Studies,
Color Research and Applications, Vol.21, 1996;2:87-96.
[8] Vazquez-Corral,J. and Bertalmio, M., Spectral Sharpening of Color Sensors: Diagonal Color Constancy and
Beyond, Sensors, 2014;14(3):3965-3985.
[9] Finlayson G.D., Vazquez-Corral,J., Susstrunk, S. and Varnella, M., Spectral Sharpening by Spherical
Sampling, Journal of the optical Society of America, A, (JOSA A), 2012;29(7):1199-1210.
[10] Finlayson GD. Drew MS. Lu C. Invariant Image Improvement by sRGB colour space sharpening. In: 10th
Congress of the International Colour Association AIC Colour 05, Granada.
[11] Finlayson G.D., Hordley S. D. and Morovic P., Chromagenic filter design, in Proceedings of 10th
Congress
of the International Colour Association, 2005.
[12] Gillespie A.R., Kahle AB. And Walker R.E., Color enhancement of highly correlated images. I. De-
correlation and HSI Contrast Stretches. Remote Sensing of Environment, 1986:209-235.
[13] Liu J.G. and Moore J.M., Direct de-correlation stretch technique for RGB color composition, International
Journal of Remote Sensing, Vol.17, 1996;5:1005–1018.
[14] Barnard K., Ciurea F. and Funt B.V. Sensor sharpening for computational color constancy, Journal of the
Optical Society of America, Vol.18, 2001;11:2728-2743.
[15] Drew M.S. and Bergner, S., Analysis of spatio-chromatic decorrelation for colour image reconstruction,
Color Imaging Conference 2012.
[16] Drew M.S., Chen C., Hordley S.D. and Finlayson G.D., Sensor transforms for invariant image
enhancement, 10th Color Imaging Conference, 2002;325-329.
[17] Hamilton Y. Chong, Steven J.Gurtler and Todd Zickler, The von Kries Hypothesis and a Basis for Color
Constancy, The International Conference on Computer Vision, 2007.
[18] Novak CL. Shafer SA. Supervised color constancy, Physics-Based vision, Color, Jones and Bartlett,
1992;284-299.
[19] Van Trigt, C., Illuminant-dependence of Von Kries type quotients, International Journal of Computer
Vision, Vol. 61, 2005;1:5-30.
[20] Abdellatif M. Al-Salem NH. Illumination-Invariant Color Recognition for Mobile Robot Navigation, In
Proc. of the International Conference on Instrumentation, Control and Information Technology,
2005:3311-3316, SICE, Okayama, Japan.
[21] Abdellatif M., Effect of Color Pre-Processing on Color-Based Object Detection, In Proc. of the
International Conference on Instrumentation, Control and Information Technology, SICE,2008: 1124-
1129, Tokyo, Japan.
[22] http://publiclab.org/wiki/ndvi-plots-ir-kit (accessed 23 August 2014).
[23] http://motion.kodak.com/motion/Products/Lab_And_Post_Production/Kodak_filters/wrattten2.htm
(accessed 23 August 2014).
[24] http://www.mcrl.co.jp/english/products.html (accessed 27 Sept. 2014).
12
Fig.1 Response functions of spectrally a) overlapping, b) disjoint filters and c) sharpening concept.
Fig.2. Color processes and applications.
13
Fig.3. The definition of color accuracy and precision.
Fig.4. The concept of measuring the overlap response.
14
Fig.5. The spectral Transmittance and sensitivity function for a- Kodak Wratten filters, [23], b- Typical
Digital Camera sensor (Canon EOS 500 D, ref [22]), and c- combined response of camera and filters.
15
Fig. 6. The color responses using gelatin filters, a) Green and Blue versus Red, b) Red and Blue versus
Green for camera number I.
16
Fig.7 The corrected images for the Mondrian for ( unsharpened - DB sharpened -FC sharpened) images.
17
Fig.8. The Precision Metric, PM, computed for 8 patches subject to four illumination colors.
Column order (unsharpened- DB sharpened - FC sharpened).
Fig.9. The Distinction Metric, DM, computed for corrected 8 Mondrian patches. Column order
(unsharpened- DB sharpened - FC sharpened).
18
Fig.10. Sample images sharpened by the Filter-Chart method.
19
Fig.11 Color registration sample images.
20
Fig. 12. Comparison of spectral sharpening methods in the precision–distinction space.
Fig.13. Distinction metric versus correlation metric.
21
Fig.14. The merits and disadvantages of spectral overlap.
Fig.15. Schematic showing the concept of gamut mapping and effect of spectral overlap on color recovery.
22
Table I. Color responses when using color gelatin filters for camera I, the patches are all
gray from Murakami Color Research Laboratory, Tokyo, Japan, 1995, chart type GS-
2L.
Patch Red filter Green Filter Blue Filter
R G B R G B R G B
1 1 0 1 0 0 0 0 0 1
2 15 13 5 3 2 5 0 0 7
3 30 18 7 5 11 17 0 0 17
4 59 20 34 15 40 22 0 0 27
5 79 23 42 20 59 34 0 0 40
6 110 28 57 28 83 45 1 0 66
7 138 35 72 35 111 60 4 0 81
8 164 42 81 43 136 73 6 0 95
9 196 52 104 53 164 89 9 0 107
10 216 63 122 64 182 105 10 0 108
11 230 70 130 72 193 115 12 0 116
Table II. Comparison between Filter-Chart and Data-Based spectral
sharpening methods in terms of Precision and Distinction metrics for
Mondrian colors using camera I.
Patch
No.
Raw captions Corrected Unsharpened
PM DM PM DM
1 11.28 18.64 15.4 16.4
2 15.44 29.9 6.55 29.6
3 23.11 13.96 5.16 13.2
4 20 12.6 5.7 13.9
5 13.75 16.6 4.87 14.8
6 13.1 26.2 8.66 24.8
7 17 11.3 5.9 13.9
8 24.6 31 9.64 30
Average 17.2 20 7.735 19.63
23
Table III Distinction and Correlation of real color images sharpened by Filter-Chart
method.
Before
Sharpening
After
Sharpening
Change of
DM Image DM CM DM CM %
01 8.91 .97 15.22 .78 6.31
02 14.44 .76 20.95 .482 6.51
03 9.39 .99 12.92 .93 3.53
04 8.56 .97 15.15 .84 6.59
06 9.98 .921 18.91 .69 8.93
15 14.31 .96 19.46 .80 5.15
17 11.63 .95 20.25 .754 8.62
18 21.89 .98 30.86 .918 8.97
20 10.03 .97 20.12 .72 10.09
21 24.46 .96 54.42 .563 29.96
22 22.6 .89 41.71 .593 19.11
24 11.78 .94 22.3 .67 10.52
25 10.99 .93 22.38 .64 11.39
26 10.38 .97 25.81 .608 15.43
Average
Table IV. Color registration errors for Mondrian scene imaged by two cameras (
camera II and Nikon coolpix 4300 as a reference).
Original
Color
Sharpened
color
Reference
Color
Original
Change
Change after
sharpening
Patch H
deg.
S % H,
deg.
S, % H,
deg.
S, % H,
deg.
S, % H,
deg.
S, %
1 36 30 46 72 44 91 8 61 2 19
2 338 67 1 85 4 84 26 17 3 1
3 221 71 232 86 197 81 -24 10 35 5
4 152 66 146 71 117 67 -35 1 29 4
5 316 67 312 82 315 73 -1 6 3 9
6 343 54 11 84 17 83 34 29 6 1
7 332 78 358 97 356 96 24 18 2 1
8 261 16 20 12 283 9 22 7 97 3
9 156 58 127 67 116 80 40 22 11 13
Table V. Comparison between spectral sharpening methods using camera
I.
Condition 1-PM DM CM
Unsharpened
corrected Image
11%(its space)
7.7%(FC-space)
19.63 .86
Data-Based
sharpened, DB
8.72 33.71 .66
Filter-Chart method,
FC
9.98 42.3 .57