Embed Size (px)
Citation preview

Randomized decode-and-forward strategiesfor two-way relay networks
Saeed Bagheri, Francesco Verde, Donatella Darsena, and Anna Scaglione
Abstract
Randomized space-time block coding (RSTBC) is a decentralized cooperative technique that ensures diversity
gains through the recruitment of multiple uncoordinated relays, with virtually no signaling overhead. In this paper,
RSTBC is applied to two-way relaying wireless networks which, when two terminals want to send a message
to each other, can potentially improve the network throughput by allowing them to exchange data over two or
three time slots via bidirectional relay communications. Specifically, two decode-and-forward relaying strategies
are considered which take up only two time slots. In the former scheme, if joint maximum likelihood decoding
of the symbol blocks transmitted by the two terminals is reliable, the relays perform RSTBC of the sum of the
estimated symbol vectors. In the latter scheme, Bayesian interference cancellation is performed at the relays by
subtracting from the received signal the (hard) estimate of the first reliably decoded symbol block (with the other
one treated as noise): if the decoding of only one symbol block is reliable, the relay carries out RSTBC of the
estimated symbol vector; on the other hand, if both the symbol blocks are decoded reliably, the relay performs
RSTBC of the sum of the estimated symbol vectors. A variant of the second randomized forwarding scheme is
also proposed for three-time-slot relaying. The diversity orders achievable through the three proposed schemes are
calculated and the obtained theoretical results are validated by means of Monte Carlo numerical simulations.
Index Terms
Decode-and-forward relaying, diversity analysis, interference cancellation, maximum likelihood (ML) detec-
tion, space-time randomized coding, two-way cooperation.
I. INTRODUCTION
In ad hoc network applications or in distributed large scale wireless networks, several methods were
proposed to exploit spatial diversity without using multiple antenna structures [1], [2], [3], [4], [5]. This
This work was presented in part at the 44th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove (California), USA,November 7-10, 2010.
S. Bagheri and A. Scaglione are with the Department of Electrical and Computer Engineering, University of California, Davis, CA 95616-5294, USA [e-mail: (sabagheri, ascaglione)@ucdavis.edu]. F. Verde is with the Department of Biomedical, Electronic and TelecommunicationEngineering (DIBET), University Federico II, Naples I-80125, Italy (e-mail: [email protected]). D. Darsena is with the Department forTechnologies (DIT), Parthenope University, Naples I-80143, Italy (e-mail: [email protected]).

1
can be achieved by gaining benefit from the presence of multiple nodes distributed in space, which may
cooperatively serve as relay stations. One possible approach for involving more than one cooperative
relay without a significant loss in spectral efficiency is to use space-time block coding (STBC) among
the relays [3], [4], [5]. However, the use of conventional STBC rules [6] in a distributed fashion is
a challenging design problem since coordination among the source, the destination, and the relays is
strictly needed before using a specific STBC, which is typically designed for a fixed number of transmit
antennas. Unfortunately, due to the distributed and ad hoc nature of cooperative links, the number of
virtual antennas (i.e., cooperating nodes) is generally unknown and randomly time-varying.
With reference to decode-and-forward relaying, randomized STBC (RSTBC) was proposed in [7], [8],
which decentralizes the transmission since a preliminary coordination among all the participants in the
cooperative phase is not required. Recently, relying on the idea of RSTBC, a decentralized amplify-and-
forward cooperation protocol has been also proposed in [9]. However, the randomized designs in [7], [8],
[9] are targeted at a one-way relay network, i.e., unidirectional communications via relays are considered.
Two-way communication has recently aroused great interest due to its potential of significantly en-
hancing the network throughput when two terminals want to exchange information to each other [10].
Relaying schemes for two-way wireless networks have been recently proposed in [11], [12] based on
linear dispersion (LD) STBC [5]. With appropriate code design, the achievable diversity order of these
schemes is equal to the number of active relays N if the total power P used in the whole network is
very large, i.e., log(P) ≫ log[log(P)], and the length K of the source symbol blocks is greater than N .
More recently, a full decentralized two-way decode-and-forward relaying scheme over two time slots has
been proposed in [13]; however, the proposed approach is based on the assumption that the two terminals
employ a single antenna and each relay is equipped with two antennas. Moreover, the theoretical analyses
carried out in all the aforementioned papers do not account for the fact that, due to the error-free detection
constraint, the set of relays that are responsible for retransmission in the second time slot is random.
Herein, we focus on decode-and-forward two-way relaying protocols using two and three time slots. In
two-time-slot protocols, the terminals are allowed to transmit simultaneously, which requires a single
slot. In three-time-slot schemes, the two terminals transmit to the relays over the first and second time

2
slot, respectively. In both cases, the relays subsequently forward a linear combination of the two decoded
symbol blocks, which involves an additional slot and, finally, each terminal can recover the desired symbol
vector by cancelling from the received signal the contribution corresponding to its own message.
In this paper, we propose three randomized relaying schemes which are fully decentralized and we
analyze their diversity performances by explicitly taken into account the randomness in the cooperating
set. The idea is that to combining two way relay codes with RSTBC. With reference to two-time-slot
relaying, the first protocol is based on joint ML detection of the symbol blocks at the relays which
transmit in the second time slot only if both the source symbol vectors are detected reliably, whereas
in the second one the relays performs Bayesian interference cancellation and retransmit not only if both
the two symbol blocks are correctly detected, but also if only one symbol blocks is detected reliably.
The third proposed scheme is a variant of the second aforementioned forwarding protocol when the two
terminal nodes can communicate over three time slots. Moreover, we calculate theoretically the diversity
order of each of these schemes and we show that, as in [7], the diversity order min{L,N}, where L
is the number of virtual antennas, can be achieved in all the three protocols, although for the second
proposed scheme this is true only up to a certain very large signal-to-noise ratio (SNR) threshold.
The rest of the paper is organized as follows. Section II describes the network model. In Section III,
the first and second proposed schemes, which are based on joint ML detection at the relays and Bayesian
interference cancellation at the relays, respectively, are introduced and analyzed. Section IV reports the
design and analysis of the third proposed scheme using three time slots. Numerical Monte Carlo results in
terms of symbol-error-probability (SEP) are presented in Section V, followed by conclusions in Section VI.
Notation: The fields of complex, real, and integer numbers are denoted with C, R, and Z, respectively;
matrices [vectors] are denoted with upper [lower] case boldface letters (e.g., A or a); the field of m×n
complex [real] matrices is denoted as Cm×n [Rm×n], with Cm [Rm] used as a shorthand for Cm×1
[Rm×1]; the superscripts ∗, T , H , and −1 denote the conjugate, the transpose, the Hermitian (conjugate
transpose), and the inverse of a matrix, respectively; min{x, y} [max{x, y}] is the minimum [maximum]
value between x ∈ R and y ∈ R; U(x) denotes the unit step function, i.e., U(x) = 1 if x ≥ 0, zero
otherwise, the cardinality of a set A is denoted by |A|; 0m ∈ Rm, Om×n ∈ Rm×n, and Im ∈ Rm×m

3
denote the null vector, the null matrix, and the identity matrix, respectively; rank(A) and det(A) denote
the rank and the determinant of the matrix A, respectively; ∥a∥ is the Euclidean norm of a ∈ Cn; |A|k+
denotes the product of the k ≤ n smallest positive eigenvalues of the Hermitian matrix A ∈ Cn×n;
P (A) denotes the probability that an event A occurs; the operator E[·] denotes ensemble averaging and a
circular symmetric complex Gaussian random vector x ∈ Cn with mean µ ∈ Cn and covariance matrix
K ∈ Cn×n is denoted as x ∼ CN (µ,K); the function Φ(n;A1, A2, . . . , AN) is defined as
Φ(n;A1, A2, . . . , AN) ,∑
C ⊆ {1, 2, . . . , N}with |C| = n
(∏i∈C
Ai
)[∏i/∈C
(1− Ai)
],
where the sum is done with respect to all the subsets C of {0, 1, . . . , N} having cardinality n, whereas
0 ≤ Ai ≤ 1, for i ∈ {1, 2, . . . , N}, and∑N
i=1 Ai = 1, Φ(.) is the probability of having n successful trials
of the Poisson binomial distribution; the average probability of error for a communication system over
a fading channel usually behaves as Pe(SNR) ≤ Gc SNR−d∗ [14], where SNR stands for signal-to-noise
ratio without fading, Gc is called the coding gain, and the diversity order is defined as follows
d∗ , limSNR→+∞
− log[Pe(SNR)]log(SNR)
,
and it is said that the system achieves diversity order d if d ≤ d∗.
II. NETWORK MODEL
We consider a two-way wireless network (see Fig. 1) composed of two terminal nodes Tm, with
m ∈ {1, 2}, and N randomly distributed relay nodes Ri, with i ∈ {1, 2, . . . , N}. The two terminals
transmit information through the relays to each other and all the nodes in the network have a single
transmit/receive antenna.
The transmitted blocks of source symbols at the two terminals have size K and are expressed as
sm , [s(1)m , s
(2)m , . . . , s
(K)m ]T ∈ CK , for m ∈ {1, 2}, which are composed of independent and identically
distributed (i.i.d.) zero-mean unit-variance symbols assuming equiprobable values drawn from a finite
alphabet A. In addition, we assume that the average power of terminal Tm is Pm and, for a fair comparison
and simplicity, that the total average power on all the relays is PR and each relay node has equal average
power PR/N . Hence, the total average power available in the network is P = P1 + P2 + PR.
4
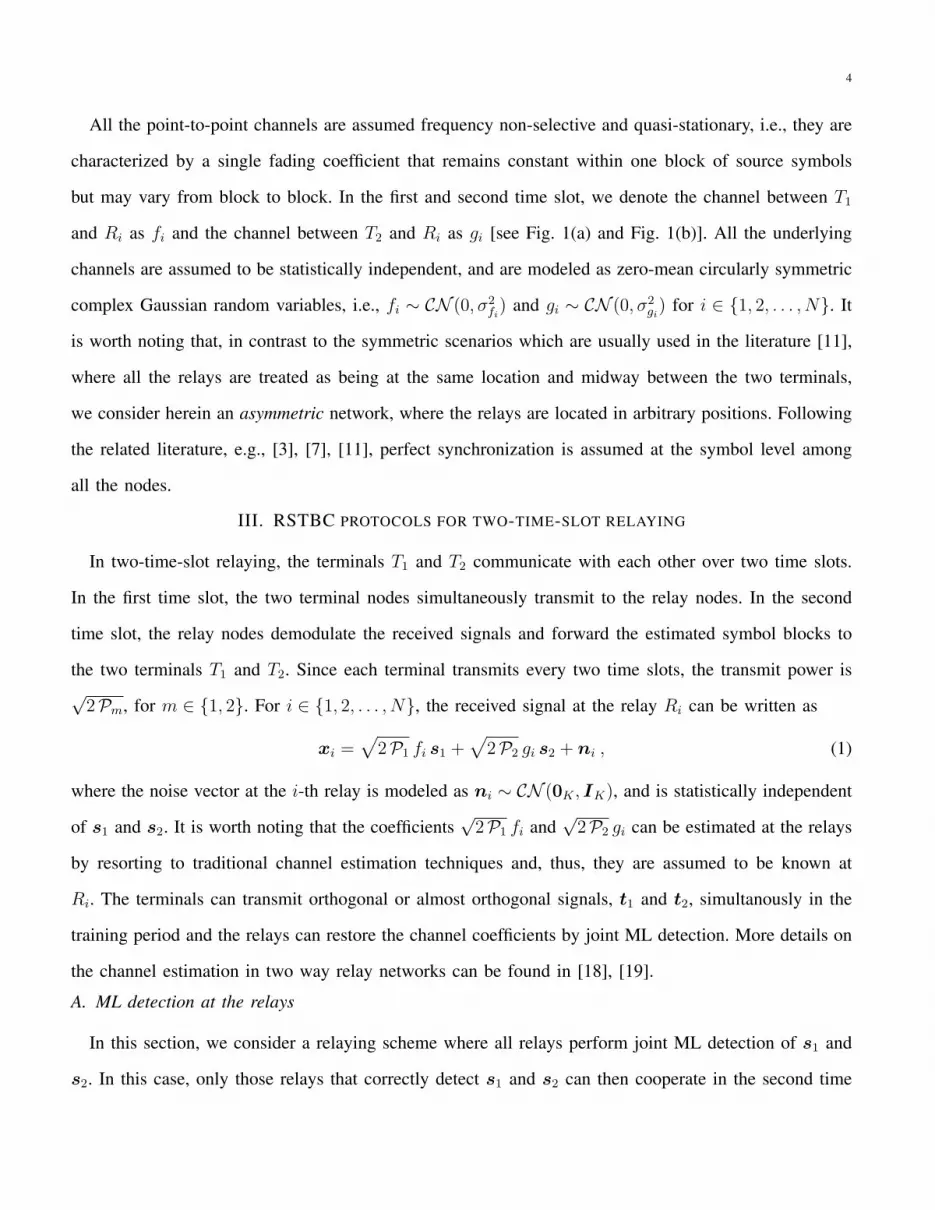
All the point-to-point channels are assumed frequency non-selective and quasi-stationary, i.e., they are
characterized by a single fading coefficient that remains constant within one block of source symbols
but may vary from block to block. In the first and second time slot, we denote the channel between T1
and Ri as fi and the channel between T2 and Ri as gi [see Fig. 1(a) and Fig. 1(b)]. All the underlying
channels are assumed to be statistically independent, and are modeled as zero-mean circularly symmetric
complex Gaussian random variables, i.e., fi ∼ CN (0, σ2fi) and gi ∼ CN (0, σ2
gi) for i ∈ {1, 2, . . . , N}. It
is worth noting that, in contrast to the symmetric scenarios which are usually used in the literature [11],
where all the relays are treated as being at the same location and midway between the two terminals,
we consider herein an asymmetric network, where the relays are located in arbitrary positions. Following
the related literature, e.g., [3], [7], [11], perfect synchronization is assumed at the symbol level among
all the nodes.
III. RSTBC PROTOCOLS FOR TWO-TIME-SLOT RELAYING
In two-time-slot relaying, the terminals T1 and T2 communicate with each other over two time slots.
In the first time slot, the two terminal nodes simultaneously transmit to the relay nodes. In the second
time slot, the relay nodes demodulate the received signals and forward the estimated symbol blocks to
the two terminals T1 and T2. Since each terminal transmits every two time slots, the transmit power is√2Pm, for m ∈ {1, 2}. For i ∈ {1, 2, . . . , N}, the received signal at the relay Ri can be written as
xi =√
2P1 fi s1 +√2P2 gi s2 + ni , (1)
where the noise vector at the i-th relay is modeled as ni ∼ CN (0K , IK), and is statistically independent
of s1 and s2. It is worth noting that the coefficients√2P1 fi and
√2P2 gi can be estimated at the relays
by resorting to traditional channel estimation techniques and, thus, they are assumed to be known at
Ri. The terminals can transmit orthogonal or almost orthogonal signals, t1 and t2, simultanously in the
training period and the relays can restore the channel coefficients by joint ML detection. More details on
the channel estimation in two way relay networks can be found in [18], [19].
A. ML detection at the relays
In this section, we consider a relaying scheme where all relays perform joint ML detection of s1 and
s2. In this case, only those relays that correctly detect s1 and s2 can then cooperate in the second time

5
slot, by simultaneously forwarding the detected symbols to the two terminals using RSTBC.
1) First time slot: Under the assumption that√2P1 fi and
√2P2 gi are perfectly known at the ith
relay, nonlinear joint ML detection (JMLD) of both s1 and s2 from (1) can be performed as the optimum
multiuser detection. Note that (1) represents an under-determined mathematical problem, i.e., each relay
has to decode 2K unknowns while it has only K data points. Even though (1) could be efficiently solved
using generalized sphere decoder [20], the high decoding complexity could be a practical issue. In fact,
the high complexity of nonlinear ML detection generally avoids its use in practical systems specialy with
large K and constellation size. Moreover, the error probability of the under-determined system (1), even
with optimum joint ML decoding, is still high (in comparison with the single user case). To find the
SEP at relay Ri, we rewrite (1) as xi = S hi + ni, where S , [s1, s2] ∈ CK×2 is taken from a set
A of |A|2K different symbol matrices and hi , [√2P1 fi,
√2P2 gi]
T ∈ C2. In the sequel, an element
of A is referred to as S(k), with k ∈ {1, 2, . . . , |A|2K}. Joint ML detection of s1 and s2 amounts to
Si = argminS∈A ∥xi − S hi∥2 and the corresponding SEP can be upper bounded by using the union
bound [15] as
Pi(e) ≤1
|A|2K
|A|2K∑k=1
|A|2K∑ℓ = 1ℓ = k
P [S(k) → S(ℓ) at Ri] ≤ (|A|2K − 1) maxk, ℓ ∈ {1, 2, . . . , |A|2K}
ℓ = k
Pi[S(k) → S(ℓ) at Ri] ,
(2)
where Pi[S(k) → S(ℓ) at Ri] is the pairwise error probability (PEP), which is the probability that S(ℓ)
is detected at the relay Ri when S(k) is transmitted. By using the Chernoff inequality [15], one has
Pi[S(k) → S(ℓ) at Ri] ≤ exp
[−1
4hH
i M (k,ℓ) hi
], where
M (k,ℓ) , [S(k) − S(ℓ)]H [S(k) − S(ℓ)] =
m(k,ℓ)11 m
(k,ℓ)12
m(k,ℓ)21 m
(k,ℓ)22
∈ C2×2 . (3)
We observe that Pi[S(k) → S(ℓ) at Ri] is maximized, with respect to k and ℓ, when S(k) and S(ℓ) differs
only in one symbol. If this different symbol is in s1, then m(k,ℓ)11 = d2min and m
(k,ℓ)12 = m
(k,ℓ)21 = m
(k,ℓ)22 = 0,
where dmin denotes the minimum distance between the symbols in A. Similarly, if the different symbol

6
is in s2, then m(k,ℓ)22 = d2min and m
(k,ℓ)11 = m
(k,ℓ)12 = m
(k,ℓ)21 = 0. Consequently, we can write
maxk, ℓ ∈ {1, 2, . . . , |A|2K}
ℓ = k
Pi[S(k) → S(ℓ) at Ri] ≤ max
{e−1
2d2min P1 |fi|2
, e−1
2d2min P2 |gi|2}
. (4)
It is seen from (2) and (4) that, besides |A|, K, and dmin, the largest value of Pi(e) is dictated by
Zi , min{P1 |fi|2,P2 |gi|2}. Thus, we say that relay Ri can reliably detect both s1 and s2 if Zi ≥ τ , where
τ > 0 is a pre-determined threshold. In the proposed scheme, all the relay nodes that reliably detected both
s1 and s2 cooperate in order to transmit the source symbols to the destinations. This error-free constraint
renders the number of active relays M in the second time slot a discrete random variable which can
assume the values {0, 1, . . . , N}. Since all the underlying channels are statistically independent and the
relays make decisions independently of each other, it follows that, for n ∈ {0, 1, . . . , N}, the probability
mass function (pmf) of M is given by P (M = n) = Φ(n;P1, P2, . . . , PN) where Pi , P (Zi ≥ τ) is the
probability of cooperation for the ith relay. To completely specify the pmf of M , we have to calculate
Pi. Let us define Xi , P1 |fi|2 and Yi , P2 |gi|2. The random variables Xi and Yi have exponential
distributions with parameters L(i)1 = 1/(P1 σ
2fi) and L
(i)2 = 1/(P2 σ
2gi), respectively. The random variable
Zi is the minimum of two independent exponential random variables and its cumulative distribution
function (CDF) is FZi(τ) = 1− e−[L
(i)1 +L
(i)2 ] τ . Thus, we have
Pi = 1− FZi(τ) = e−[L
(i)1 +L
(i)2 ] τ . (5)
P (M = n) is a Poisson binomial distribution and its value can be calculated from a recursive formula
[22]
P (M = n) =
∏N
i=1 (1− pi) n = 0
1n
∑ki=1 (−1)i−1P (M = n− i)T (i) n > 0
(6)
where T (i) =N∑j=1
(pj
1−pj
)i. Another way to compute this probability, more efficiently, is to use discrete
Fourier transform [23]. Then, this probability can be written as follows
P (M = n) =1
N + 1
N∑l=0
Cnl
N∏i=1
(1 + (C l − 1)pi
)(7)
where C = exp(− 2iπ
n+1
).

7
As a special case, when σ2fi
and σ2gi
do not depend on i, i.e., all the relays are at the same location,
the pmf P (M = n) boils down to a binomial distribution.
It is noteworthy that the choice of the threshold τ is a design parameter. Indeed, if τ ≪ min{P1 σ2fi,P2 σ
2gi},
there will be a high probability of cooperation, i.e., Pi ≈ 1; in particular, in the high SNR regime, i.e.,
when P1,P2 → +∞, it results that Pi → 1. On the other hand, if τ ≫ max{P1 σ2fi,P2 σ
2gi}, there will
be a low probability of cooperation, i.e., Pi ≈ 0. The impact of τ on the performance of the considered
scheme is numerically investigated in Section V.
2) Second time slot: Each cooperating node, which reliably detected both s1 and s2, applies a deter-
ministic space-time block code to the detected signals, thus obtaining the code matrices G(sm) ∈ CP×L,
for m ∈ {1, 2}, where L is the number of virtual antennas and P ≥ K is the block length transmitted by
each antenna. The random vectors s1 and s2 are drawn from a set A of |A|K different symbol vectors.
Hereinafter, a particular element of the set A will be referred to as s(k), with k ∈ {1, 2, . . . , |A|K}. Without
considering any specific code structure, we only assume that code matrix satisfies the rank criterion [6],
which states that, for any pair G(k) , G(s(k)) and G(ℓ) , G(s(ℓ)), where s(k), s(ℓ) ∈ A with k = ℓ,
the matrix G(k) − G(ℓ) is full rank, i.e., its rank is min{P,L}. Let ri ∈ CL denote the randomization
vector that contains the linear combination coefficients for the i-th node, in the proposed scheme, the
relay Ri transmits the block β [G(s1)+G(s2)] ri to the two terminals during the second time slot, where
β ,√(2PR)/N denotes the scaling factor used by the relays in order to satisfy the average power
constraint.1 Another possiblity is to transmit√2β [G(s1 ⊕ s2)] ri, where ⊕ denotes the XOR operator.
The terminal Tm can decode s1 ⊕ s2 ∈ A and extract its intended signal simply by perfoming XOR
of the decoded signal with sm. Here, we only consider the first case, since the performance analysis is
almost the same, and we compare the performance of both schemes in Section V. For convenience, the
deterministic code is normalized such that E[GH(sm)G(sm)] = 12IL, for m ∈ {1, 2}, and, moreover, we
impose that E[∥ri∥2] = 1. In the following, we only consider the received signal at the second terminal,
1In principle, each relay node may use two different and independent randomization vectors with identical distributions to performrandomization of the code of the demodulated symbols, i.e., the i-th relay might transmit β [G(s1) ri,1 + G(s2) ri,2] to the two terminalsat the second time slot. However, it can be seen that two different randomization vectors do not provide any benefits in this scheme.

8
which is given by
y2 = βM∑i=1
g′i [G(s1) + G(s2)] ri +w2 = β [G(s1) + G(s2)] Rg′ +w2 , (8)
where the noise vector at the second terminal is modeled as w2 ∼ CN (0P , IP ), which is statistically
independent of s1, s2, and ri. Moreover, the matrix R , [r1, r2, . . . , rM ] ∈ CL×M collects all the
randomization coefficients of the active relays, whereas g′ ∈ CM gathers the channel coefficients between
the M cooperative nodes and terminal T2 which, under our assumptions, is a zero-mean complex circularly
symmetric Gaussian vector, with diagonal autocorrelation matrix Σg′ , E[g′ (g′)H ] ∈ RM×M . We observe
that the effective channel vector g′ , βRg′ ∈ CL can be estimated at the terminal T2 by resorting to
training-based techniques and, thus, it assumed to be known at T2.
Since s2 is also known at T2, ML decoding can be used at the receiver to recover s1. Under the
assumption that g′ is perfectly known, the ML decoding of s1 can be easily obtained from (8) as follows
s1 = argmins1∈A
∥y2 − [G(s1) + G(s2)] g′∥2 = argmins1∈A
∥y2 − G(s1) g′∥2 , (9)
where y2 , y2−G(s2) g′. At this point, the evaluation of the average SEP at the output of the ML detector
of the terminal T2 is similar to that of a one-way relay network employing RSTBC [7]. Conditioned on
M > 1, we summarize the average performance of the scheme at hand in the lemma:
Lemma 1: Let M = n, for n ∈ {1, 2, . . . , N}, and η(n) , min{L, n}. Assume that the matrix R is
full-rank with probability one, i.e., rank(R) = η(n), and E[|RRH |−1η(n)+ ] is finite. The expected value
P 2(e |M = n) of the SEP at the terminal T2 over the sample space of the pair {R, g′} is bounded as
P 2(e |M = n) ≤ Gc(n) γ−η(n) , (10)
where γ , β2 is the SNR at T2 without fading and Gc(n) , Γ(n) E[|RRH |−1η(n)+ ], with
Γ(n) , 4η(n) (|A|K − 1)[mink, ℓ ∈ {1, 2, . . . , |A|K}
ℓ = k
{|Q(k,ℓ)|η(n)+}]|Σg′|η(n)+
(11)
and Q(k,ℓ) , [G(k) − G(ℓ)]H [G(k) − G(ℓ)] ∈ CL×L.
Proof: See [7].

9
We observe from (10) that, given M = n > 1, the randomized two-way relaying scheme with joint ML
demodulation at the relays has maximum diversity order η(n) = min{L, n} if the conditions in Lemma 1
are satisfied. However, due to the randomness in the number of active relays in the second time slot,
such diversity order is not completely representative of the actual system performance.
By virtue of the total probability theorem [15] and accounting for (10), we obtain the following upper
bound on the average (with respect to R, g′, and M ) SEP P 2(e) at the output of the ML detector of the
second terminal:
P 2(e) =N∑
n=0
P 2(e |M = n)P (M = n) ≤(1− 1
|A|K
)P (M = 0)+
N∑n=1
Gc(n) γ−η(n) P (M = n), (12)
where P 2(e |M = 0) is the SEP at the receiver when none of the relays cooperate. If M = 0, the received
signal (8) contains noise only and, in this case, the terminal can only draw at random one symbol vector
from the set A, thus making a correct decision with probability 1/|A|K . The upper bound in (12) in the
high SNR region which, since P1, P2, and PR are monotonically increasing functions of P , is equivalent
to take the limit as P approaches positive infinity. Since Pi → 1 as P1,P2 → +∞ by virtue of (5), it
follows that limP→+∞ P (M = n) = 1 for n = N , zero otherwise. Consequently, we obtain
limP→+∞
− log[P 2(e)]
log(P)= η(N) , (13)
which shows that the maximum diversity order is min{L,N}.
The diversity scheme considered in this subsection requires that the relays perform joint ML detection
of the source blocks s1 and s2. For those systems with simple relay units such as wireless sensor networks
and practical ad hoc or multihop wireless networks, this processing may be too computationally expensive
for large value of K and/or |A|. In the next subsection, we investigate the diversity performance of a
suboptimal scheme, which involves a less processing burden at the relays.
B. Bayesian interference cancellation (BIC) at the relays
In the previous subsection, we assumed that each relay node cooperates only if it has correctly detected
both the symbol vectors s1 and s2. However, due to fading effects, some relay nodes might be more likely
to detect one symbol block correctly rather than both of them. Therefore, in this section, we propose a

10
relaying scheme where relay nodes cooperate using RSTBC not only if they have reliably detected both
s1 and s2, but also if they have correctly detected only one of s1 and s2.
1) First time slot: The computation of Si in Subsection III-A can be reduced if one of the symbol
vectors, s1 or s2, can be canceled out. Therefore, we consider a scheme where s1 and s2 in (1) are
sequentially detected one at a time, by treating the other symbol vector as unknown interference. Let
SINR(i)m and SNR(i)
m denote the signal-to-interference-plus-noise ratio (SINR) and the SNR, respectively,
at relay Ri corresponding to the symbol vector sm, for m ∈ {1, 2}. Accounting for (1), one has
SINR(i)1 ,
E[∥∥√2P1 fi s1
∥∥2]E[∥∥√2P2 gi s2 + ni
∥∥2] =2P1 |fi|2
2P2 |gi|2 + 1=
2Xi
2Yi + 1, (14)
SNR(i)1 ,
E[∥∥√2P1 fi s1
∥∥2]E[∥ni∥2
] = 2P1 |fi|2 = 2Xi , (15)
where we recall that the coefficients√2P1 fi and
√2P2 gi are known at Ri. Similarly, SINR(i)
2 , 2Yi
2Xi+1
and SNR(i)2 , 2Yi are defined. The candidate relays initially attempt to firstly detect the symbol block
with the highest SINR. For instance, if SINR(i)1 ≥ SINR(i)
2 , then s1 is tentatively detected at the relay
Ri, by treating s2 as unknown interference. More precisely, from a Bayesian point of view, this means
that, instead of using the fact that s2 belongs to the set A, we simply recall that E[s2] = 0K and
E[s2 sH2 ] = IK ; then, the prior for s2 is taken to the maximum entropy distribution satisfying such
constraints, which turns out to be the Gaussian distribution CN (0K , IK) [16]. In this case, we say that
Ri can reliably detect s1 if SINR(i)1 ≥ τ , where τ > 0 is a pre-determined threshold:2 if Ri can reliably
detect s1, it adopts the decision rule:
si,1 = argmins1∈A
∥∥∥xi −√
2P1 fi s1
∥∥∥2 , (16)
and attempts to detect s2 afterwards; otherwise, if SINR(i)1 < τ , the ith relay is unable to correctly
demodulate both s1 and s2 and, thus, it will be inactive in the second time slot. In particular, when
SINR(i)1 ≥ SINR(i)
2 and SINR(i)1 ≥ τ , we say that Ri can reliably detect s2 if SNR(i)
2 ≥ τ ; in this case,
2With a slight abuse of notation, we denote with τ the threshold for all the three proposed relaying scheme; in principle, the thresholdused for such protocols may be different.

11
an estimate of s2 is determined according to the decision rule:
si,2 = argmins2∈A
∥∥∥xi −√2P1 fi si,1 −
√2P2 gi s2
∥∥∥2 , (17)
and the relay is capable of correctly detecting both s1 and s2. On the other hand, if SNR(i)2 < τ , only s1
can be detected reliably. A similar algorithm is used at the relay Ri when SINR(i)2 > SINR(i)
1 . Henceforth,
in the proposed scheme, some relay nodes may only detect s1 reliably, some other nodes might only
detect s2 correctly, and some nodes could reliably detect both of them.
Let D1, D2 and D1,2 denote the set of relays that have detected only s1, only s2, and both symbol
vectors, respectively. Due to the error-free constraints, the cardinalities of these sets are random variables,
which depend on the available power in the network and τ . In this respect, let us define the sets B1 ,
{b1,1, . . . , b1,M1} = D1∪D1,2 and B2 , {b2,1, . . . , b2,M2} = D2∪D1,2, where the number of relay nodes that
reliably detected sm is denoted by Mm, for m ∈ {1, 2}. In general, M1 and M2 are two discrete random
variables which can assume the values {0, 1, . . . , N}. Since all the underlying channels are statistically
independent by assumption and the relays make decisions independently of each other, it follows that, for
nm ∈ {0, 1, . . . , N}, the pmf of Mm can be expressed as P (Mm = nm) = Φ(nm;P(1)Bm
, P(2)Bm
, . . . , P(N)Bm
),
where P(i)Bm
is the probability that the ith relay belongs to Bm, with m ∈ {1, 2}. In the case of τ ≥ 1, the
probability P(i)Bm
is calculated in Appendix A. As a special case, when σ2fi
and σ2gi
do not depend on i,
i.e., all the relays are at the same location, the pmf P (Mm = nm) ends up to a binomial distribution. Let
us focus on the situation when P1 = P2 = P/4 and PR = P/2, which is the optimal power allocation
for some centralized relaying schemes [11]. In this case, it is interesting to observe that, in the high SNR
region, i.e., as P goes to positive infinity, one has (see Appendix A)
P(i)
B1, lim
P→+∞P
(i)B1
=σ2fi
σ2fi+ σ2
giτ+
σ2gi
σ2gi+ σ2
fiτ. (18)
In words, the probability that the relay Ri reliably detects s1 does not approach to one in the high SNR
region: indeed, the exact value of P(i)
B1depends on the decoding threshold τ , as well as on the ratio σ2
fi/σ2
gi,
which depends on the distance of relay node i to two terminals. The impact of τ on the performance of
the considered scheme is numerically investigated in Section V.

12
2) Second time slot: Each relay transmits a random linear combination of the columns of the deter-
ministic space-time code matrix of the symbol block(s) detected correctly. More precisely, if the relay
Ri reliably detected the only vector sm, with m ∈ {1, 2}, it transmits the block G(sm) ri to the two
terminals T1 and T2 during the second time slot, where the code matrix G(·) and the randomization vector
ri have been defined in Subsection III-A. On the other hand, if both s1 and s2 were reliably detected at
the relay Ri, the block [G(s1) + G(s2)] ri is transmitted to T1 and T2 during the second time slot. It is
worth noting that the relay nodes that detect only one symbol vector transmit with half of their available
power. This fact simplifies the performance analysis of this scheme and the results can be considered as
a lower bound for the performance of the original scheme where each cooperative node transmits with
its full available power. Thus, we can write the received signals at the terminal T2 as follows
y2 = β
∑i∈D1
g′i G(s1) ri +∑i∈D2
g′i G(s2) ri +∑i∈D1,2
g′i [G(s1) + G(s2)] ri
+w2 , (19)
where β and w2 have been defined in Subsection III-A. Due to symmetry, the expression of received
signal at the terminal T1 is omitted. Eq. (19) can be more compactly written as
y2 = β
[∑i∈B1
g′i G(s1) ri +∑i∈B2
g′i G(s2) ri
]+w2 = β [G(s1)R1 g
′1 + G(s2)R2 g
′2] +w2 , (20)
where Rm , [rbm,1 , rbm,2 , . . . , rbm,Mm] ∈ CL×Mm and g′
m , [g′bm,1, g′bm,2
, . . . , g′bm,Mm] ∈ CMm is a zero-
mean complex circularly symmetric Gaussian vector, with diagonal autocorrelation matrix given by Σg′m,
E[g′m (g′
m)H ] ∈ RMm×Mm , for m ∈ {1, 2}. Hereinafter, let Mm = nm for nm ∈ {0, 1, . . . , N}, we assume
that Rm is full-rank with probability one, i.e., rank(Rm) = η(nm) = min{L, nm}, and E[|Rm RHm|−1
η(nm)+ ]
is finite. We underline that T2 can estimate the partial effective channel vectors g′1 , βR1 g
′1 ∈ CL and
g′2 , βR2 g
′2 ∈ CL via training and, thus, they are assumed to be known at the terminal T2.
Since s2 is also known at T2, under the assumption that g′1 and g′
2 are perfectly acquired, the ML
decoder at T2 can be obtained by solving the optimization problem:
s1 = argmins1∈A
∥y2 − G(s1) g′1 − G(s2) g′
2∥2= argmin
s1∈A∥y2 − G(s1) g′
1∥2, (21)
where y2 , y2 − G(s2) g′2. It is apparent that the decision rule (21) is similar to that reported in (9).
Consequently, reasoning as done in Subsection III-A, it is seen that the expected value P 2(e |M1 = n1)

13
of the probability of symbol error over the sample space of the pair {R1, g′1} is bounded as
P 2(e |M1 = n1) ≤ Gc,1(n1) γ−η(n1) , for n1 ∈ {1, 2, . . . , N} , (22)
with Gc,1(n1) , Γ1(n1) E[|R1 RH1 |−1
η(n1)+], where Γ1(n1) is obtained from (11) by replacing η(n) and
Σg′ with η(n1) and Σg′1, respectively. Hence, given Mm = nm > 1, the randomized two-way relaying
scheme with interference cancellation at the relays has maximum diversity order η(nm) = min{L, nm}.
However, it is more interesting to also average the performance with respect to M1. To this goal, by
invoking the total probability theorem [15] and accounting for (22), we obtain the following upper bound
on the average (with respect to R1, g′1, and M1) SEP P 2(e) at the output of the ML detector of T2:
P 2(e) =N∑
n1=0
P 2(e |M1 = n1)P (M1 = n1)
≤ Pub2 (e) ,
(1− 1
|A|K
)P (M1 = 0) +
N∑n1=1
Gc,1(n1) γ−η(n1) P (M1 = n1) , (23)
where P 2(e |M1 = 0) = 1− P 2(c |M1 = 0) is the SEP at the receiver when none of the relays reliably
detected s1, with P 2(c |M1 = 0) = 1/|A|K . As previously done, let us focus on the special case when
P1 = P2 = P/4 and PR = P/2, which implies that γ = P/N . It is evident that, in this case, since P(i)B1
does not converge to one as P → +∞ and, thus, one has P (M1 = 0) =∏N
i=1
[1− P
(i)Bm
]= 0, the upper
bound on P 2(e) is a constant in the high SNR regime, i..e,
limP→+∞
Pub2 (e) =
(1− 1
|A|K
) N∏i=1
[1− P
(i)
B1
], (24)
where P(i)
B1is given by (18). This fact implies that the diversity order of the considered scheme is zero
and the system performance exhibits a SEP floor for high enough SNR values. However, Theorem 1
shows that there exists a threshold γth, which is very large in practical situations, such that, for values of
SNR less than γth, the maximum diversity order equal to min{L,N} is achieved.
Remark 1: We have to mention that many existing AF based TWR protocols can achieve zero-
approaching error prpbability, while the proposed scheme here shows a SEP floor. The reason is that
AF based TWR protocols assume that a specific set of nodes is designated to cooperate. In many cases
the cost of such designation is ignored. The purpose of this paper is to focus on the physical layer

14
performance of the randomized scheme, which does not require such designation. However, it is possible
to incorporate control signals that may prevent the situation that gives rise to the error floor to occur.
Namely, it is possible to include a control signal sent at unison from the group of the cooperative nodes
that acknowledge their willingness to cooperate. The lack of such response can inform the source and
destination that there are no available relays in the second phase. The analysis of such protocol is beyond
the scope of this paper. For more details on such control signals and protocols one may want to see [21].
Theorem 1: Suppose that P1 = P2 = P/4 and PR = P/2. The relaying scheme with interference
cancellation at the relays achieves the diversity order min{L,N} up to a threshold γth for the SNR. This
threshold is approximately lower bounded as γth ≥ γlbth , with
γlbth =
Γ1(N) E[|R1RH1 |−1
min{L,N}+ ] Υ
1−(1− 1
|A|K
) ∏Ni=1
[1− P
(i)
B1
]
1/L
, (25)
where P(i)
B1is defined in (18) and
Υ ,
∑N
n1=LΦ(n1;P(1)
B1, P
(2)
B1, . . . , P
(N)
B1) , for N ≥ L;∏N
i=1 P(i)
B1, for L > N ,
(26)
and Φ(·) is defined in footnote I.
Proof: See Appendix B.
When N ≥ L, the expression of Υ in (26) can be simplified for large N . Indeed, as an application of the
central limit theorem, since M1 can also be seen as the sum of independent Bernoulli random variables
(which have finite mean and variance), its CDF approaches that of a Gaussian random variable for large
N . Specifically, let µ1 ,∑N
i=1 P(i)
B1and σ2
1 ,∑N
i=1 P(i)
B1(1− P
(i)
B1), for large N , one has
Φ(n1;P(1)
B1, P
(2)
B1, . . . , P
(N)
B1) ≈ 1√
2 πσ21
e− (n1−µ1)
2
2σ21 . (27)
Consequently, for N ≥ L and large N , one obtains
Υ ≈ 1√2 πσ2
1
N∑n1=L
e− (n1−µ1)
2
2σ21 . (28)
The result of Theorem 1 can be further on explicated by assuming a specific randomization rule. For
instance,3 if we assume that the entries of R1 are i.i.d. circular symmetric complex Gaussian random
3Other randomization rules can be used [7], such as real Gaussian, uniform phase, real/complex spherical distribution, antenna selection.

15
variables with zero mean and variance 1/L, by invoking well-known results regarding the joint probability
density function of the eigenvalues of a matrix having central Wishart distribution, one has (see, e.g., [7])
E[|R1RH1 |−1
min{L,N}+ ] =(|N − L| − 1)!
(max(N,L)− 1)!, with N = L . (29)
It is shown in Section V that γlbth takes on large values which are well beyond the SNR range of practical
interest. Hence, the loss of diversity of the considered scheme is basically a problem of theoretical interest,
and has limited impact on the actual system performance.
3) Summary of results for i.i.d. channel coefficients: In this subsection, we ignore the large scale
pathloss and consider the case of i.i.d. Rayleigh faded channel coefficients and derive the results for this
special case. From (48), for i.i.d. channel case with unit variance, we have
P(i)B1
=1
1 + τexp
(− τ
2P1
)+
1
1 + τexp
[− τ
2P1
− τ(τ + 1)
2P2
]. (30)
which results in PB1 , limP→+∞ P(i)B1
= 21+ τ
. This asymptotic probability does not depend on the relay
index. Then γlbth can be written as
γlbth =
Γ1(N) E[|R1RH1 |−1
min{L,N}+ ] Υ
1−(1− 1
|A|K
) (τ−1τ+1
)N
1/L
, (31)
where
Υ ,
∑N
n1=L
(Nn1
)(PB1)
n1(1− PB1)N−n1 , for N ≥ L;(
21+τ
)N, for L > N ,
(32)
For N ≥ L, we can obtain Υ by applying order statistics and reach an integral formula instead of
a summation as Υ = N !(L−1)!(N−L)!
∫ PB1
0uL−1(1 − u)N−Lu. For N ≫ L, by approximating binoimal
distribution by the normal distribution, we can approximate Υ by G((L+0.5)(1+τ)−2N√
2N(τ−1)
). Thus, we can
simplify γlbth as
γlbth ≈ 4
E[|R1RH1 |−1
L+ ]
min k, ℓℓ = k
{|Q(k,ℓ)|L+}
1/L([
1 +
(1− 1
|A|K
) (τ − 1
τ + 1
)N](|A|K − 1)Υ
)1/L
(33)

16
IV. RSTBC PROTOCOL FOR THREE-TIME-SLOT RELAYING
In three-time-slot relaying, the communication between terminals T1 and T2 consumes three time slots.
In the first time slot, terminal T1 transmits s1 to the relay nodes. In the second time slot, the other
terminal T2 transmits s2 to the relay nodes. In the third time slot, each relay utilizes the ML rule to
detect the received symbol block at the first and second time slots and, then, they jointly forward the
estimated symbol vectors to the two terminal nodes. For i ∈ {1, 2, . . . , N}, the received signals in the
first and second time slots at the relay Ri can be written, respectively, as
xi,1 =√
3P1 fi s1 + ni,1 and xi,2 =√3P2 gi s2 + ni,2 , (34)
where ni,1 and ni,2 are i.i.d. with distribution CN (0K , IK) and, moreover, are statistically independent
of s1 and s2. As in Section III, the coefficients√3P1 fi and
√3P2 gi are assumed to be known at Ri.
Let Pi,1(e) and Pi,2(e) denote the SEP at the output of the ML detector of the relay Ri in the first and
second time slots, respectively, one has (see [15])
Pi,1(e) ≈ 4
(1− 1√
|A|
)Q
(√9Xi
|A| − 1
)and Pi,2(e) ≈ 4
(1− 1√
|A|
)Q
(√9Yi
|A| − 1
), (35)
where Q(x) , (1/√2π)
∫ +∞x
e−u2/2 du denotes the Q-function, whereas Xi = P1 |fi|2 and Yi = P2 |gi|2
have been already defined in Subsection III-B. We say that relay Ri can reliably detect s1 if Xi ≥ τ ,
where τ > 0 is a pre-determined threshold; similarly, it can reliably detect s2 if Yi ≥ τ . The probability
P(i)Bm
that the ith relay belongs to Bm can be expressed as P(i)Bm
= e−L(i)m τ . It is worth mentioning that, in
this scheme, detectors at the relay nodes do not suffer from interference. As a result, by comparing P(i)Bm
with (5) and the expression of P(i)Bm
calculated in Appendix A, the probability of cooperation is higher
than the probability of cooperation in two-time-slot relaying schemes.
In the third time slot, as in Subsection III-B, each relay based on what it has decoded correctly,
transmits a random linear combination of the columns of an orthogonal space-time code G(·), by using
the randomization vector ri. From this point on, the signal model at the terminal T2 and the corresponding
SEP analysis strictly follow the treatment developed in Subsection III-B for the second time slot. Thus,
under the same assumptions, we directly report the following final result: the average (with respect to all

17
the fading channels, randomization coefficients, and the number of active relays in the cooperative slot)
SEP P 2(e) at the output of the ML detector of the second terminal can be upper bounded as
P 2(e) ≤(1− 1
|A|K
)P (M1 = 0) +
N∑n1=1
Gc,1(n1) γ−η(n1) P (M1 = n1) , (36)
where γ , β2 is the SNR at T2 without fading, with β ,√
(3PR)/N denoting the scaling factor used
by the relays in order to satisfy the average power constraint. To calculate the diversity order of the
proposed three-time-slot scheme, we have to evaluate the upper bound in (36) in the high SNR region
which, since P1, P2, and PR are monotonically increasing functions of P , is equivalent to take the limit
as P → +∞. Since P(i)Bm
→ 1 as P1,P2 → +∞, it follows that
limP→+∞
− log[P 2(e)]
log(P)= η(N) , (37)
which shows that the maximum diversity order is min{L,N}.
V. NUMERICAL PERFORMANCE ANALYSIS
In this section, we present the performance of the proposed randomized distributed space-time codes.
We obtain the average SEP (ASEP) through the Monte Carlo method, by comparing the performance of
the proposed randomized schemes for different values of N and τ , as well as for different randomization
rules (see [7] for details). We only consider the ASEP for terminal T2. The Alamouti space-time code
[17] is used with L = 2 and, to equalize the data rate, QPSK modulation is employed at T1 and T2
for the two-time-slot case, whereas 8-PSK is used in the case of the three-time-slot relaying. In the
xOy Cartesian coordinate system, the relays are distributed randomly and independently in a circle with
center at origin O and radius 2, with the two terminals located at the positions (−1, 0) and (1, 0). We set
P1 = P2 = P/4 and PR = P/2 in the case of two time slots, whereas P1 = P2 = P/3 and PR = P/3
for three-time-slot relaying. Thus, the SNR at T2 is γ = P/N in both cases. The variance of the channel
coefficient characterizing the link between two nodes is modeled as ρ−2, where ρ is the distance. In
simulations, for a fair comparison, we assume that in BIC scheme, the relays that have decoded only one
signal use their full available power in the second time slot. For comparison, we have also considered
the case where relay nodes transmit the XOR of their decoded signals at the second time slot. We have

18
to mention that in BIC scheme, this is possible when only the relays that have decoded both signals
cooperate in the second time slot.
A. ABER versus the decoding threshold τ for two-time-slot relaying
Figs. 2 and 3 illustrate the ASEP versus the threshold τ when the SNR is fixed and is equal to 30
dB, for N = 3 potential relays. For both the RSTBC schemes with JMLD and BIC at the relays, the
ASEP increases when τ raises since, according to (5), the probability of cooperation Pi is a decreasing
function of τ ; it can be also seen that the uniform spherical randomization rule results in the lowest
ASEP while the complex Gaussian randomization one results in the highest ASEP. In both figures, the
best performance is achieved when τ = 1, that is, few reliable (in the SEP sense) relays are not preferable
with respect to a greater number of less reliable relays.
B. ABER versus SNR and the number of potential relay nodes N for two-time-slot relaying
In this experiment, we fix τ = 1.8 and we compare the performance of the proposed schemes as a
function of the SNR. Figs. 4 and 5 illustrate the performance of the RSTBC scheme with JMLD at the
relays and JMLD with XOR for N = 3 and N = 6, respectively. As predicated in Subection III-A, the
diversity order equal to min{L,N} = 2 is achieved in this scheme for both N = 3 and N = 6. The
uniform spherical randomization performs slightly better than the other randomization rules when N = 3,
but for the case where N = 6, all randomization rules perform almost the same. The ASEP is slightly
smaller for N = 6 in comparison with the case where N = 3 for the same SNR. The performance of
the JMLD with XOR shows 3dB improvement for both N = 3 and N = 6. The reason is that the relays
that cooperate transmit one symbol instead of the sum of two symbols. Thus, the received signal at the
receiver has twice the power of the received signal in the other case.
The ASEP of the RSTBC scheme with BIC at the relays and their counterpart with XOR is shown in
Figs. 6 and 7, for N = 3 and N = 6, respectively. The results obtained from simulation are compared
with analytical results in Table I. As mentioned in Subsection III-B, for both cases we can verify that
the scheme achieves the diversity order min{L,N} = 2 up to the mentioned thresholds. Moreover, by
comparing Fig. 6 with Fig. 7, we observe that the ASEP is smaller for N = 6 for the same SNR.
Increasing the number of potential relays decreases the ASEP, but when N >> L, increasing N only

19
slightly decreases the ASEP. We also observe that for N = 3, BIC with XOR transmission in the second
time slot has worse performance at the lower SNRs and its performance is almost as the same as BIC in
higher SNRs or even better. This is because for small N , in low SNR, the chance of decodnig both signal
is small. Thus, BIC with XOR has higher ASEP. When the SNR grows, the chance of decoding both
signals at a relay increases and the performance of the BIC with XOR improves because the cooperating
nodes only retransmit one symbol instead of sum of two symbols. Another important factor is that in
BIC the relay nodes that only decoded one signal cooperate, while in BIC with XOR, they do not assist
the transmission. The behavior of ASEP in these two schemes is because of the aggregation of these two
effects. These effects can not be observed clearly when N = 3.
The BIC as a suboptimum decoding strategy has larger ASEP in comparison with JMLD. Both schemes
show the same diversity order equal to min{L,N}, but the BIC shows a floor in the ASEP and it achieves
the diversity order up to a threshold.
C. ABER versus the SNR and the number of potential relay nodes N for three-time-slot relaying
Figs. 8 and 9 illustrate the performance of the proposed three-time-slot relaying scheme versus the
SNR for N = 3 and N = 6, respectively. Such a scheme achieves the diversity order of 2 too. For both
N = 3 and N = 6, this scheme using three time slots performs worse than the RSTBC two-time-slot
protocol with JMLD at the relays; whereas, up to the SNR threshold γlbth , its performance is slightly better
than that of the proposed RSTBC two-time-slot scheme with BIC at the relays for N = 3, paying instead
a noticeable performance penalty when N = 6.
VI. CONCLUSIONS
In this paper, we studied two-way wireless relaying protocols using RSTBC at relays and analyze
the performance of the proposed two- and three-time-slots relaying schemes. More specifically, the first
proposed scheme with joint ML detection at the relays takes up only two time slots and achieves the
diversity order min{L,N}, but it requires more complex detectors at the relay nodes. We proposed another
two-time-slot protocol where the relays perform Bayesian interference cancellation, which achieves the
same diversity order up to a threshold for the SNR that, however, assumes very large values in practice.

20
Finally, a variant of the second scheme is proposed for three-time-slot relaying, whose diversity order is
min{L,N}, but a smaller maximum sum-rates can be achieved for large values of N .
APPENDIX A
Calculation of P (i)Bm
: Since D1, D2, and D1,2 are disjoint sets, the probability that the ith relay node
belongs to the set Bm is P(i)Bm
= P(i)Dm
+ P(i)D1,2
, for m ∈ {1, 2}, where P(i)D1
, P [Ri ∈ D1], P(i)D2
, P [Ri ∈
D2], and P(i)D1,2
, P [Ri ∈ D1,2]. Since all the relays resort to interference cancellation for demodulating
the source blocks s1 and s2, these probabilities can be explicitly written as
P(i)D1
= P[(SINR(i)
1 ≥ SINR(i)2 ) ∩ (SINR(i)
1 ≥ τ) ∩ (SNR(i)2 < τ)
], (38)
P(i)D2
= P[(SINR(i)
2 > SINR(i)1 ) ∩ (SINR(i)
2 ≥ τ) ∩ (SNR(i)1 < τ)
], (39)
P(i)D1,2
= P[(SINR(i)
1 ≥ SINR(i)2 ) ∩ (SINR(i)
1 ≥ τ) ∩ (SNR(i)2 ≥ τ)
]+ P
[(SINR(i)
2 > SINR(i)1 ) ∩ (SINR(i)
2 ≥ τ) ∩ (SNR(i)1 ≥ τ)
]. (40)
Since we are interested in the high SNR regime, we assume that τ ≥ 1. This assumption simplifies the
expressions in (38)–(40), which can be rewritten as follows
P(i)D1
= P[(SINR(i)
1 ≥ τ) ∩ (SNR(i)2 < τ)
]= P
[(Xi ≥ τ Yi +
τ
2
)∩(Yi <
τ
2
)], (41)
P(i)D2
= P[(SINR(i)
2 ≥ τ) ∩ (SNR(i)1 < τ)
]= P
[(Yi ≥ τ Xi +
τ
2
)∩(Xi <
τ
2
)], (42)
P(i)D1,2
= P[(SINR(i)
1 ≥ τ) ∩ (SNR(i)2 ≥ τ)
]+ P
[(SINR(i)
2 ≥ τ) ∩ (SNR(i)1 ≥ τ)
]= P
[(Xi ≥ τ Yi +
τ
2
)∩(Yi ≥
τ
2
)]+ P
[(Yi ≥ τ Xi +
τ
2
)∩(Xi ≥
τ
2
)], (43)
where we have also used (14)–(15) and their counterparts SINR(i)2 and SNR(i)
2 . At this point, we recall
that, since fi ∼ CN (0, σ2fi) and gi ∼ CN (0, σ2
gi), the random variables Xi , P1 |fi|2 and Yi ,
P2 |gi|2 are independent and have exponential distributions with parameters L(i)1 = 1/(P1 σ
2fi) and L
(i)2 =
1/(P2 σ2gi), respectively. Due to the symmetry of these probabilities, it can be easily shown that P (i)
D1=
f(P1,P2;σ2fi, σ2
gi), P (i)
D2= f(P2,P1;σ
2gi, σ2
fi), and P
(i)D1,2
= g(P1,P2; σ2fi, σ2
gi) + g(P2,P1; σ
2gi, σ2
fi), where
f(P1,P2; σ2fi, σ2
gi) ,
∫ ∫S1
1
P1P2 σ2fiσ2gi
e− x
P1 σ2fi e
− y
P2 σ2gi U(x)U(y) dx dy , (44)
g(P1,P2; σ2fi, σ2
gi) ,
∫ ∫S2
1
P1P2 σ2fiσ2gi
e− x
P1 σ2fi e
− y
P2 σ2gi U(x)U(y) dx dy , (45)

21
with S1 , {(x, y) ∈ R2 : x ≥ τ y + τ/2, y < τ/2} and S2 , {(x, y) ∈ R2 : x ≥ τ y + τ/2, y ≥ τ/2}.
Calculation of the integrals in (44) and (45) leads to the following results:
f(P1,P2;σ2fi, σ2
gi) =
σ2fi
σ2fi+ σ2
giP2 τP1
{exp
(− τ
2P1 σ2fi
)− exp
[− τ
2P2 σ2gi
− τ(τ + 1)
2P1 σ2fi
]}, (46)
g(P1,P2;σ2fi, σ2
gi) =
σ2fi
σ2fi+ σ2
giP2 τP1
exp
[− τ
2P2 σ2gi
− τ(τ + 1)
2P1 σ2fi
], (47)
from which readily follows that P (i)B1
= k(P1,P2; σ2fi, σ2
gi) and P
(i)B2
= k(P2,P1;σ2gi, σ2
fi), where
k(P1,P2;σ2fi, σ2
gi) =
σ2fi
σ2fi+ σ2
giP2 τP1
exp
(− τ
2P1 σ2fi
)+
σ2gi
σ2gi+ σ2
fiP1 τP2
exp
[− τ
2P1 σ2fi
− τ(τ + 1)
2P2 σ2gi
]. (48)
APPENDIX B
Proof of Theorem 1: To derive a lower bound on the SNR threshold γth over which the considered
scheme loses diversity, let us consider the following “diversity” function d(γ) , − log[Pub2 (e)]
log(γ), where
γ = P/N and Pub2 (e) is defined in (23). It should be observed that if one takes the limit of d(γ) as
γ → +∞, one obtains the diversity order of the system, which turns out to be zero. Our aim is to study the
behavior of d(γ) for (finite) large values of γ, i.e., we assume that 1 ≪ γ < +∞. For such values of γ, we
approximate P(i)B1
with P(i)
B1given by (18), i.e., P (i)
B1≈ P
(i)
B1. Moreover, for simplicity of notation, we define
the (positive) coefficients a0 ,(1− 1
|A|K
) ∏Ni=1
[1− P
(i)
B1
], an1 , Gc,1(n1) Φ(n1;P
(1)
B1, P
(2)
B1, . . . , P
(N)
B1),
and aL ,∑N
n1=L an1 . It follows that d(γ) = min{L,N} − η(γ), with
η(γ) ,log[a0 γ
min{L,N} +∑min{L,N}−1
n1=1 an1 γmin{L,N}−n + amin{L,N}
]log(γ)
≈log[a0 γ
min{L,N} + amin{L,N}]
log(γ),
(49)
where the approximation holds for γ ≫ 1. At this point, to calculate a lower bound γlbth on γth, we
have to study for which value of γ it results that η(γ) = min{L,N}, whose solution is given by
γlbth =
(amin{L,N}
1−a0
)1/min{L,N}. Eq. (25) easily follows by substituting a0, aL, and aN in γlb
th , and observing
that: (i) for N ≥ L, the factor Gc,1(n1) is independent of n1, since η(n1) = min{L, n1} = L, for
n1 ∈ {L,L+ 1, . . . , N}; (ii) for L > N , the factor Gc,1(N) clearly depends only on N .

22
REFERENCES
[1] J.N. Laneman and G.W. Wornell, “Distributed space-time block coded protocols for exploiting cooperative diversity inwireless networks,” IEEE Trans. Inf. Theory, vol. 49, pp. 2415–2425, Oct. 2003.
[2] A. Sendonaris, E. Erkip, and B. Aazhang, “User cooperation diversity – Part I & II,” IEEE Trans. Commun., vol. 51, pp.1927–1948, Nov. 2003.
[3] J.N. Laneman, D. Tse, and G.W. Wornell, “Cooperative diversity in wireless networks: efficient protocols and outagebehavior,” IEEE Trans. Inf. Theory, vol. 50, pp. 3062–3080, Sept. 2004.
[4] S. Yiu, R. Schober, and L. Lampe, “Distributed space-time block coding,” IEEE Trans. Commun., vol. 54, pp. 1195–1206,July 2006.
[5] Y. Jing and B. Hassibi, “Distributed space-time coding in wireless relay networks,” IEEE Trans. Wireless Commun., vol.5, pp. 3524–3536, Dec. 2006.
[6] V. Tarokh, H. Jafarkhani, and A. Calderbank, “Space-time block codes from orthogonal designs,” IEEE Trans. Inf. Theory,vol. 45, pp. 1456-1467, July 1999.
[7] B. Sirkeci-Mergen and A. Scaglione, “Randomized space-time coding for distributed cooperative communication”, IEEETrans. Signal Process., vol. 55, pp. 5003-5017, Oct. 2007.
[8] M. Sharp, A. Scaglione, and B. Sirkeci-Mergen, “Randomized cooperation in asynchronous dispersive links”, IEEE Trans.Commun., vol. 57, pp. 64–68, Jan. 2009.
[9] F. Verde and A. Scaglione, “Randomized space-time block coding for distributed amplify-and-forward cooperative relays”,Proc. of IEEE Int. Conf. Acoustics, Speech and Signal Process. (ICASSP), Dallas, Texas, Mar. 2010, pp. 3030-3033.
[10] S. Katti, S. Gollakota, and D. Katabi, “Embracing wireless interference: analog network coding”, Proc. of IEEE(SIGCOMM), Kyoto, Japan, Aug. 2007, pp. 397–408.
[11] T. Cui, F. Gao, T. Ho, and A. Nallanathan, “Distributed space-time coding for two-way wireless relay networks”, IEEETrans. Signal Process., vol. 57, pp. 658-671, Feb. 2009.
[12] P. Popovski and H. Yomo, “Physical Network Coding in Two-Way Wireless Relay Channels”, Communications, 2007.ICC ’07. IEEE Int. Conf. on , vol., no., pp.707-712, 24-28 June 2007.
[13] F. Verde and A. Scaglione, “Decentralized space-time block coding for two-way relay networks”, Proc. of 11th IEEEWorkshop Signal Process. Advances in Wireless Commun. (SPAWC), Marrakech, Morocco, June 2010.
[14] D. Tse and P. Viswanath, Fundamentals of Wireless Communication, Cambridge University Press, 2005.[15] J.G. Proakis, Digital Communications. New York: McGraw-Hill, 2001.[16] J.O. Berger, Statistical decision theory and Bayesian analysis. New York: Springer-Verlag, 1985.[17] S.M. Alamouti, “A simple transmit diversity technique for wireless communications,” IEEE J. Select. Areas Commun.,
vol. 16, pp. 1451–1458, Oct. 1998.[18] F. Gao, R. Zhang, and Y.C. Liang, “Optimal Channel Estimation and Training Design for Two-Way Relay Networks”,
IEEE Trans. Commun., vol. 57, pp. 3024–3033, Oct. 2009.[19] B. Jiang, F. Gao, X. Gao, and A. Nallanathan, “Channel Estimation and Training Design for Two-Way Relay Networks
with Power Allocation”, IEEE Trans. Wireless. Commun., vol. 9, pp. 2022–2032, June. 2010.[20] T. Cui and C. Tellambura, “An efficient generalized sphere decoder for rank-deficient MIMO systems”, IEEE Commun.
Lett., vol. 9, pp. 423–425, May. 2005.[21] P. Liu, C. Nie, E. Erkip and S.S. Panwar, “Robust Cooperative Relaying in a Wireless LAN: Cross-Layer Design and
Performance Analysis”, Proc. of Global Communications Conference. (GLOBECOM), Honolulu, Hawaii, USA, 2009.[22] X. H. Chen, A. P. Dempster and J. S. Liu, “Weighted finite population sampling to maximize entropy”, Biometrika 81
(3): pp. 457–469, 1994[23] M. Fernandez and S. Williams, “Closed-Form Expression for the Poisson-Binomial Probability Density Function”, IEEE
Trans. Aerospace and Electronic Systems., vol. 46, No. 2 pp. 803–817, April. 2010.

23
T1
R1
R2
RN
T2
Relays
Terminal 1 Terminal 2
f1
f2
fN
g1
g2
gN
(a) First time-slot
T1
R1
R2
RN
T2
Relays
Terminal 1 Terminal 2
f1
f2
fN
g1
g2
gN
(b) Second time-slot
Fig. 1. Wireless two-way relay network model for two-time-slot protocols. (a) First time-slot: transmission from terminals to relays. (b)
Second time-slot: transmission from relays to terminals.

24
1 1.5 2 2.5 3 3.5 4 4.5 510
−3
10−2
10−1
τ
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Joint ML detection in two−time−slot with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical Randomization
Fig. 2. ASEP versus τ for the RSTBC scheme with joint ML detection at the relays (N = 3, SNR = 30 dB).

25
1 1.5 2 2.5 3 3.5 4 4.5 510
−3
10−2
10−1
100
τ
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Bayesian interference cancellation in two−time−slot with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical Randomization
Fig. 3. ASEP versus τ for the RSTBC scheme with Bayesian interference cancellation at the relays (N = 3, SNR = 30 dB).
TABLE I
COMPARISON OF SIMULATION WITH ANALYTICAL RESULTS OF BAYESIAN INTERFERENCE CANCELLATION
Simulation Analytical value
Asymptotic SEP, N = 3 1.91× 10−3 1.89× 10−3
Asymptotic SEP, N = 6 3.58× 10−5 3.569× 10−5
γ lbth , N = 3 35dB 34.28dB
γ lbth , N = 6 40dB 36.98dB

26
0 10 20 30 40 5010
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
SNR(dB)
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Joint ML detection in two−time−slot with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical RandomizationComplex Gaussian Randomization with XORUniform Phase Randomization with XORUniform Spherical Randomization with XOR
Fig. 4. ASEP versus SNR for the RSTBC scheme with joint ML detection at the relays (N = 3, τ = 1.8).

27
0 10 20 30 40 5010
−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
SNR(dB)
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Joint ML detection in two−time−slot with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical RandomizationComplex Gaussian Randomization with XORUniform Phase Randomization with XORUniform Spherical Randomization with XOR
Fig. 5. ASEP versus SNR for the RSTBC scheme with joint ML detection at the relays (N = 6, τ = 1.8).

28
0 5 10 15 20 25 30 35 40 45 50 5510
−3
10−2
10−1
100
SNR(dB)
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Bayesian interference cancellation in two−time−slot with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical RandomizationComplex Gaussian Randomization with XORUniform Phase Randomization with XORUniform Spherical Randomization with XOR
Fig. 6. ASEP versus SNR for the RSTBC scheme with Bayesian interference cancellation at the relays (N = 3, τ = 1.8).

29
0 5 10 15 20 25 30 35 40 45 50 5510
−5
10−4
10−3
10−2
10−1
100
SNR(dB)
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Bayesian interference cancellation in two−time−slot with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical RandomizationComplex Gaussian Randomization with XORUniform Phase Randomization with XORUniform Spherical Randomization with XOR
Fig. 7. ASEP versus SNR for the RSTBC scheme with Bayesian interference cancellation at the relays (N = 6, τ = 1.8).

30
0 10 20 30 40 5010
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
SNR(dB)
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Three−time−slot relaying with Alamouti coding
Complex Gaussian Randomization
Uniform Phase Randomization
Uniform Spherical Randomization
Fig. 8. ASEP versus SNR for the RSTBC scheme with three-time-slot relaying (N = 3, τ = 1.8).

31
0 10 20 30 40 5010
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
SNR(dB)
Ave
rage
Sym
bol E
rror
Pro
babi
lity
Three−time−slot relaying with Alamouti coding
Complex Gaussian RandomizationUniform Phase RandomizationUniform Spherical Randomization
Fig. 9. ASEP versus SNR for the RSTBC scheme with three-time-slot relaying (N = 6, τ = 1.8).





























