Embed Size (px)
Citation preview
SWARM ROBOTICS
Steering self-organized robot flocks through externallyguided individuals
Hande Celikkanat • Erol Sahin
Received: 15 August 2009 / Accepted: 26 February 2010
� Springer-Verlag London Limited 2010
Abstract In this paper, we study how a self-organized
mobile robot flock can be steered toward a desired direc-
tion through externally guiding some of its members.
Specifically, we propose a behavior by extending a previ-
ously developed flocking behavior to steer self-organized
flocks in both physical and simulated mobile robots. We
quantitatively measure the performance of the proposed
behavior under different parameter settings using three
metrics, namely, (1) the mutual information metric, adop-
ted from Information Theory, to measure the information
shared between the individuals during steering, (2) the
accuracy metric from directional statistics to measure
the angular deviation of the direction of the flock from the
desired direction, and (3) the ratio of the largest aggregate
to the whole flock and the ratio of informed individuals
remaining with the largest aggregate, as a metric of flock
cohesion. We conducted a systematic set of experiments
using both physical and simulated robots, analyzed the
transient and steady-state characteristics of steered flock-
ing, and evaluate the parameter conditions under which a
swarm can be successfully steered. We show that the
experimental results are qualitatively in accordance with
the ones that were predicted in Couzin et al. model (Nat-
ure, 433:513–516, 2005) and relate the quantitative dif-
ferences to the differences between the models.
Keywords Swarm robotics � Self-organization �Flocking
1 Introduction
The coordination and control of large numbers of robots is
a challenge that defies most classical approaches to single-
robot control. Swarm robotics [7, 11], which takes its
inspiration from natural swarms such as ant colonies, aims
to tackle this challenge by analyzing the coordination
mechanisms that underly the self-organized operation of
natural swarms [4] and using them to ‘‘engineer’’ self-
organization in large groups of robots.
Self-organized systems are touted for their robustness
and scalability through their reliance on local interactions
[2]. However, the local interactions that lead to the emer-
gence of self-organization also make it difficult for an
external user to impose full control over the system. For
instance, the problem of making a flock of sheep follow a
desired trail is completely different, and we claim more
difficult, than the problem of making a single sheep do the
same. In the first case, the non-linear local interactions
among the sheep would give the flock a ‘‘mind of its own’’
and this limits the amount and extent of control an external
user can exert.
Most of the ongoing studies in swarm robotics (see [7–9,
11] for a collection of papers) have focused on developing
and analyzing coordination strategies that lead to self-
organization in groups of robots. In these studies, the
limitations of controllability due to the use of the self-
organization approach have been neglected so far, leaving
the question of how useful the approach can be in real-
world use, unanswered.
In this study, we are interested in how and to what extent
we can control the behavior of a swarm robotic system.
Specifically, we extend the flocking behavior proposed in
[53] by informing some of the robots about the preferred
direction in which we wish the swarm to move. The
H. Celikkanat � E. Sahin (&)
Kovan Research Lab., Department of Computer Eng,
Middle East Technical University, Ankara, Turkey
e-mail: [email protected]; [email protected]
H. Celikkanat
e-mail: [email protected]
123
Neural Comput & Applic
DOI 10.1007/s00521-010-0355-y

informed robots do not signal that they are ‘‘informed’’ and
instead guide the rest of the swarm by their tendency to
move in the preferred direction. We present the results of
experiments on both physical and simulated robots, and we
analyze the conditions that a self-organized flock of robots
can be effectively guided by a minority of informed robots
within the flock.
1.1 External control of swarm systems
A number of previous studies have investigated how the
behavior of swarms can be externally guided or influenced.
In an interesting study, Vaughan et al. [55] used a robotic
sheepdog to herd a duck flock to a predefined goal point.
Using an overhead camera system to track the position and
the orientation of the robot, as well as the size and center of
mass of the duck flock, they were able to compute the
instantaneous direction of motion for the robot to guide the
ducks to a desired goal point. In [24], Lien et al. studied
how a flock can be steered toward a desired path by an
external shepherd, and they proposed a set of strategies to
develop and improve behaviors such as herding, covering,
and patrolling, using simulated agents. In a later study [25],
the approach was extended to the case of multiple shep-
herds which have no means of explicit communication. In
[21], Kazadi and Chang studied the conditions under which
a swarm can be vulnerable to perturbations generated by
adversarial agents which aim to control the overall
behavior of the swarm.
1.2 Control of swarm systems via informed individuals
A different approach toward the control of swarms is to
embed externally controlled individuals. In this approach,
these embedded individuals affect the decision or the
steering of the swarm toward a desired direction via only
their local interactions and without explicitly signaling
their status. In [32], Correll et al. explored how a cow herd
can be controlled by changing the behaviors of some
individuals. Specifically, the authors devised and imple-
mented a mountable device that induces stress on cows,
which in return increases their tendency to aggregate, by
moving toward the herd center. It was shown that, by
stressing a fraction of the cows, the herd can be guided
toward a final goal position. The authors used a stress
model that propagates within a radius of detection, and
decays in time which was then used to analyze the per-
formance of the method with respect to parameters such as
the number of stressed cows, the radius of detection. Ward
et al. [57] proposed that decision making in swarms may
depend on quorum responses and used replica conspecifics
to manipulate a binary (left/right direction) preference task
in fish. The results indicated a quorum response, which was
shown to decrease the likelihood of amplifying a wrong
choice made by a small number of individuals through
indiscriminative mimicry of others. Furthermore, as the
group size increased, the non-linear quorum response
became more accurate than independent decision making
or weak linear response. Halloy et al. [15] manipulated the
collective shelter selection process of cockroaches with
robots that were socially integrated into the group. When
the robots were programmed to prefer darker shelters like
the cockroaches, robots and cockroaches would select a
common shelter, suggesting a collective decision making in
the mixed society. In contrast, when the robots were pro-
grammed to prefer lighter shelters, in most cases, they were
able to lead the whole group to prefer the lighter shelter
despite being in a minority.
Reebs [40] studied the foraging behavior of fish schools
and showed that a minority of informed individuals can
guide the whole school. In this study, 12 golden shiners
were trained in a tank to find food in a brightly lit corner. It
was shown that the flock was still guided toward the correct
corner, despite the replacement of informed individuals
(specifically 7, 9, and 11 individuals were removed) with
naive (a.k.a untrained) ones. The probability of choosing
the correct corner was shown to be proportional to the
number of informed individuals in the group. Similarly,
Seeley et al. [47] investigated the flight of honey bee
swarms in order to move to a new nest site when the hive
becomes too crowded. They have shown that only 5% of
the swarm members visit the new nest site prior to swarm
lift-off and are therefore aware of the goal direction. Such a
small ratio of informed individuals therefore seems capable
of guiding the rest of the swarm.
In Romey [42], the authors investigated on a model the
dependence of a flock’s trajectory on varying behavioral
rules of individuals, depending on interagent distance,
agents’ speeds, biases (indicating leadership), and ran-
domness. The model showed that, more ‘‘repulsive’’ indi-
viduals tended to localize at central regions, whereas
increasing the number of such agents resulted in a higher
group turning rate and a slower total velocity. Increased
variety in the individual speeds, although did not disturb
group cohesion, diminished the total forward velocity.
When individuals with occasional random behaviors were
introduced, the first few affected the group trajectory more
significantly than the rest. At reasonable amounts of noise,
the overall effect on the trajectory was small. Finally, few
agents (1 or 2 in a flock of 8) with minor biases toward a
preferred direction had a strong influence on the trajectory.
Increasing the number of such individuals decreased the
turning rate, while at the same time, increasing the degree
of compliance with the preferred direction.
Couzin et al. [6] proposed a model to explain how a
minority of informed individuals affect the decision-making
Neural Comput & Applic
123

process in animal flocks. In their model, the naive indi-
viduals arranged their positions and alignments according
to their neighbors, whereas the informed ones used also the
desired direction information. The simulations of the model
showed that the accuracy of the flock increased with the size
of flock and with the importance given to the desired
direction information. This study is one of the main inspi-
rations behind the work reported in this paper, and its
relation to our work is further discussed in Sect. 6.
1.3 Flocking
In a seminal study [41], Reynolds showed that flocking
behavior can emerge from local interactions, and he was
able to obtain realistic looking flocking behavior in com-
puter animation. In this study, Reynolds assumed that the
individuals could sense the bearing, range and orientation
of their neighbors. The simulated boids (short for bird-oid)
were able to flock by (1) avoiding collisions, (2) aligning
their headings with nearby flockmates, and (3) moving to
the center of their nearby flockmates. Kwong and Jacob
[23] further developed this behavior to include an addi-
tional goal vector and a random noise vector. They used
evolutionary techniques to adapt the weights of these five
behaviors, the maximum acceleration and the optimal
distance between the boids, resulting in a variety of
behaviors such as ring and figure-eight formations. In [27],
the effect of the dynamically changing neighborhood
relations on these formations was studied, and the swarms
were trained to imitate given average neighbor count pro-
files to produce complex behaviors. In [28], a game plat-
form was designed on this model, where a user tries to herd
the swarm by controlling one of the agents. In [19], an
extension to the L-systems were proposed, in which the
L-system is not realized by a single agent, but by a swarm
of agents. The agents’ behavior is determined by the given
model, whose parameters are determined by the specific
L-system grammar.
In [17], the authors investigated varying density distri-
butions of fish schools on a realistic individual-based
model, where individuals are allowed to have varying
lengths, representing small and large fish. When the indi-
viduals prefer being in close proximity with their ‘‘kins’’,
agent groups form in arbitrary locations. When the agents
prefer being in the proximity of similar sized agents,
concentric size groups form, with smaller fish occupying
the center. When the small agents avoid large agents, the
tendency reverses, with large agents being in the center and
small agents occupying the periphery. Finally, under all
conditions, the density is high at the front of the flock, due
to high turning rates of the leading individuals.
In multi-robotic systems, Mataric [30] claimed to
achieve flocking in a group of robots, in the form of
collective homing. She showed that by combining safe-
wandering, aggregation, dispersion, and homing behaviors,
a group of robots (which can localize themselves by sta-
tionary beacons and broadcast this information) can
‘‘flock’’ toward a homing direction. Later, Kelly and
Keating [22] used robots that were able to sense the relative
range and bearing of neighbors by a custom-made infrared
(IR) system. The group of robots first elected a leader
through a negotiation phase that took place through wire-
less communication. Then, the leader wandered in the
environment and the rest of the group followed. In a more
recent study, Hayes and Tabatabaei [16] proposed a lead-
erless flocking algorithm, for a group of robots that were
assumed to sense the range and bearing of their neighbors
to compute the center-of-mass (CoM) of the group, and its
heading toward a goal. The proposed behavior consisted of
collision avoidance and velocity-matching flock centering
behaviors. The CoM was used for the cohesion of the
group, and the change in CoM was used to align the robots.
Although the algorithm was implemented on the Webots
simulator, the authors had to emulate the sensors using an
overhead camera system on physical robots. Nembrini
et al. [34] developed a set of behaviors to achieve aggre-
gation, collective obstacle avoidance, and collective taxis
toward a beacon. The behaviors were developed on a
swarm of seven physical robots that were equipped with a
set of IR sensors for obstacle detection, an omni-directional
IR system for robot detection and a wireless communica-
tion system. Although the simulations were successful, the
experiments with physical robots were reported to suffer
from the shortcomings of the hardware.
Recently, Turgut et al. [52, 53] presented a self-orga-
nized flocking behavior for a robot swarm, without using
emulated sensors [16], a priori knowledge of the goal
direction [30, 35], or a leader [22] to guide the flock. It was
shown that the flock can self-organize to move toward a
common direction in a completely distributed way using
only local interactions among the individuals. The pro-
posed behavior was able to make a group of robots (both
physical and simulated) move straight in open environment
and avoid obstacles on the path of the flock.
1.4 Modeling studies in statistical physics
and control theory
In addition to Couzin et al.’s study [6], there has also been
studies toward modeling flocks within statistical physics
and control theory. In a seminal work, Vicsek et al. [56]
proposed the self-driven particles (SDP) model to study the
emergence of the self-aligned motion of massless particles
under local interactions to explain phenomenon observed
in biological systems [3]. The SDP model uses massless
particles which move at constant speed in a square region
Neural Comput & Applic
123

with periodic boundary conditions. The heading of each
particle is updated to the average heading of its neighbors
within its local interaction range perturbed by noise. The
results of simulations revealed that particles undergo a
phase transition from an unaligned state (all particles
moving in different directions) to an aligned state (all
particles moving in the same direction) above a certain
density or below a certain noise value [10]. The emergence
of global alignment from only local interactions of the
particles seemed to contradict the Mermin–Wagner theo-
rem [31], which stated that ordered phase (aligned state in
the SDP) cannot emerge in one- or two-dimensional sys-
tems having local interactions at non-zero temperatures
(corresponding to the existence of noise in the SDP) unless
long-range interactions exist.
In a subsequent study [50], Toner and Tu extended the
work of Vicsek et al. to propose a ‘‘quantitative theory of
flocking’’. In this study, the authors claimed that flocks are
‘‘a non-equilibrium dynamical system’’ and hence are not
constrained by the predictions of the Mermin–Wagner
theorem. They provided a theoretical analysis of how
flocks can break symmetry by moving toward an arbitrary
direction as a whole. Recently, Nagry et al. [33] argued
that the diffusion and relative displacement of the particles
among each other would provide the long-range interac-
tions required for the global alignment. In a recent follow-up
to this discussion, Aldana et al. [1] proposed the vectorial
network model (VNM), in which stationary particles
updated their headings to the average of their neighbors
perturbed by noise. However, unlike the SDP model, the
neighbors of a particle are not only picked up randomly
from the local neighborhood but also randomly from the
entire group. It was shown that the system would undergo a
phase transition from an unaligned to an aligned state when
there is at least one random neighbor in the neighboring set
of particles and the noise is also below the critical value. In
the case of totally local neighbors, the system stays in an
unaligned state unless noise is set to zero in accordance
with the predictions of the Mermin–Wagner theorem [31].
Gregoire et al. [14] extended the SDP model by adding an
attraction/repulsion term based on the local bearing and
range measurement of neighboring particles to generate
cohesive motion in open space. In this model, the heading
of each particle is updated to the weighted sum of the
heading adjustment (with the inclusion of a noise term) and
attraction/repulsion terms. In simulations, coherently
moving clusters in open space were achieved by the proper
selection of the coefficients of these terms. In a recent
study, Huepe et al. [18] investigated the underlying
dynamics of the original [56] and extended [14] SDP
models. They found that compared to the extended model,
the original SDP model creates high and unrealistic local
density values during the unaligned-to-aligned state phase
transition and is not suitable for modeling natural or robotic
swarms.
Within control theory, interest in the control and
analysis of flocking has also been on the rise recently.
Jadbabaie et al. [20] investigated the stability conditions of
the aligned motion of particles in the SDP model, neglecting
the effect of noise on the heading calculation. They showed
that stability is ensured when the neighboring graph remains
connected within a finite time interval, with time divided
into infinitely many irregular intervals. A more relaxed
condition is also proposed, indicating stable motion even if
none of the neighboring graphs is connected but the union
remains connected within a finite time interval. Tanner
et al. [48, 49] proposed a stable control law for flocking in
free space based on range, bearing, and velocity informa-
tion of neighbors of a robot in close proximity. They
considered two cases. In the fixed-topology case, neighbors
are assumed to be fixed, whereas in the dynamic-topology
case, the neighbors are assumed to vary in time (it is
assumed that the flock remains connected despite changes
in the connectivity). The proposed control law included an
attraction/repulsion term (similar to the one used in [14])
depending on local distance measurement, and an align-
ment term depending on local velocity measurement in
both cases. The authors proved the existence of stable
flocking for both cases using Graph Theory and Lyapu-
nov’s stability theorem.
In [36], Olfati-Saber proposed a ‘‘theoretical framework
for the design and analysis of distributed flocking algo-
rithms’’ for particles that are assumed to sense the positions
of their local neighbors in a noise-free way. He approached
the problem as a distributed consensus problem [37]
where the particles aim to agree on a common velocity
vector. The author proposed three algorithms for flocking:
two for open-space flocking and one for flocking in envi-
ronments containing obstacles to be avoided. The first
algorithm consisted of a gradient-based attraction/repulsion
term and a velocity-matching term and was shown to be
equivalent to Reynolds’ behaviors [41]. The authors have
shown that this algorithm was ‘‘insufficient for creation of
flocking behavior’’ in large groups leading to regular
fragmentation. In the second algorithm, the authors
extended the first algorithm by including a third term which
acted as a moving rendezvous point to provide the flock
with a common objective. The third algorithm extended the
second algorithm with obstacle avoidance by modeling
obstacles as virtual agents that move on their periphery. It
was proven that the second and third algorithms can gen-
erate stable flocking. It should be noted that this result is
consistent with the predictions of the Mermin–Wagner
theorem.
The modeling studies reviewed earlier have used models
of individuals that are largely unrealistic and at least an
Neural Comput & Applic
123
order of magnitude simpler than the models of physical
robots. First, these models have exclusively used massless-
[1, 6, 10, 14, 31, 33, 50, 56] or mass-particle [20, 36, 48,
49] models neglecting the effect of physical size in flock-
ing. Second, individuals are assumed to sense the heading
and range, or position (and velocity) of their neighbors.
This assumption, dating back to Reynolds, has proven to be
too problematic to implement on robots and has been the
main reason behind the lag in ‘‘implementing’’ flocking on
robots (see [52] for a complete discussion). Third, sensing
and actuation noise is neglected in some of the studies. It’s
especially interesting to note that studies in control theory
[20, 36, 48, 49] have almost exclusively neglected heading
noise, despite the existence of studies that relate this noise
to the emergence of flocking in statistical physics [1, 10,
14, 31, 33, 50, 56]. For instance, in studies within control
theory, individuals within the flock are assumed to sense,
communicate, and act synchronously and without any
delays, whereas in real world, robots operate asynchro-
nously and there exist both deterministic and stochastic
delays in their sensing, actuation, and communication. We
argue that the modeling studies stand on too many
assumptions and that the assumptions that they make differ
from each other, and heir applicability to robotic systems
remains a difficult challenge.
The study reported in this paper builds on our prior work
reported in [52, 53] and aims to understand how and to
what extent a mobile robot flock can be steered through
externally guided individuals within the flock. Specifically,
we extend the flocking behavior such that the flock, instead
of wandering aimlessly, tries to follow a desired direction
of motion that is externally provided by a user. Our
approach is mainly inspired by the works of [6, 40] and
[43] on the decision-making mechanisms. A preliminary
version of this work was published in [5].
2 Experimental platforms
2.1 Kobot robotic platform
Kobot is a CD-sized (12 cm diameter) mobile robot plat-
form that is developed specifically for swarm robotic
studies [52]. It has two differentially driven motors and
infrared (IR) sensors around its base. An IEEE 802.15.4/
ZigBee compliant wireless communication module with a
range of *20 m indoors is used for communication.
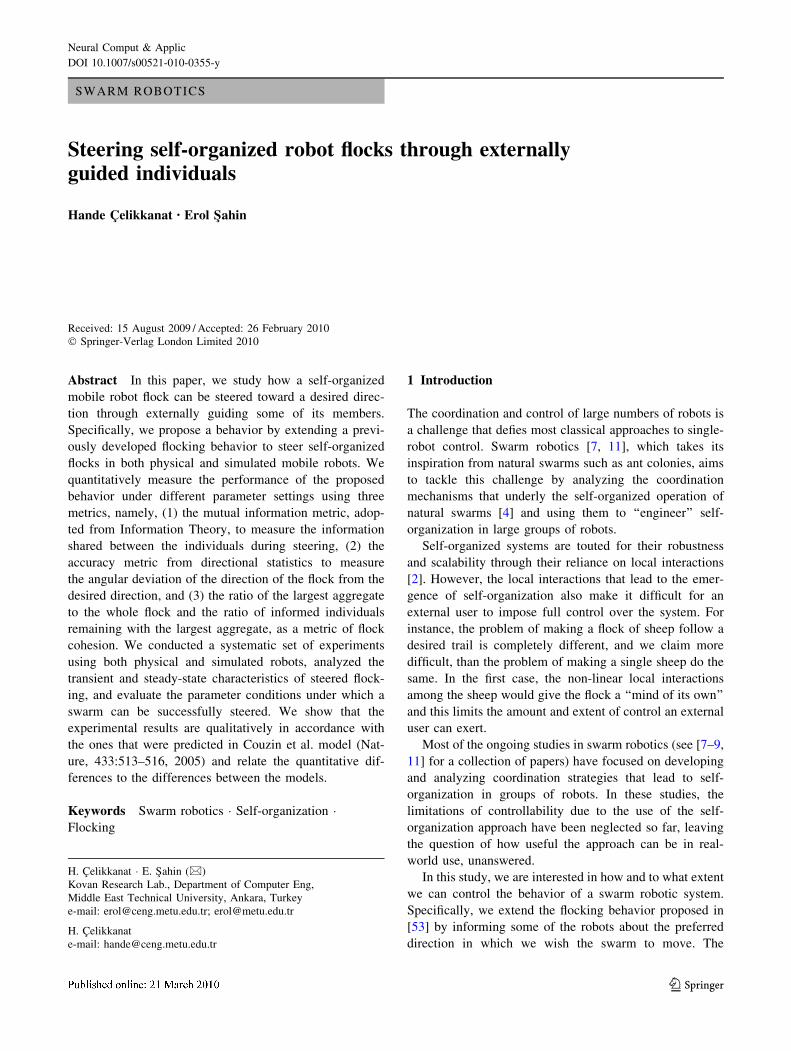
2.1.1 Infrared short-range sensing system
The infrared short-range sensing system (IRSS) is com-
posed of 8 IR sensors placed at 45� intervals around the
base (Fig. 1a). The sensors can sense artifacts within a
range of *20 cm at seven discrete levels at 18 Hz and also
distinguish kin-robots from other obstacles. Specifically,
the output of the kth sensor is a 2-tuple (ok, rk). ok 2f0; 1; . . .; 7g denotes the detection level to the object being
sensed (ok = 1 and ok = 7 indicate, respectively, a far and
nearby object. ok = 0 indicates no object is detected by the
sensor), and rk [ {0, 1} indicates whether the sensed
object is another kin-robot (rk = 1) or an ordinary obstacle
(rk = 0).
2.1.2 Virtual heading sensor
The virtual heading sensor (VHS), composed of a digital
compass and a wireless communication module, allows
the robots to sense the approximate relative orientations
of nearby robots. Specifically, the heading of the robot
with respect to the sensed North is measured in a
clockwise direction through the digital compass (Fig. 1b).
The robot broadcasts its heading information to other
robots within its communication range using the wireless
communication module. At the same time, the robot also
receives the heading information broadcasted by other
robots. The headings of the neighboring robots are con-
verted to the local reference frame of the robot by vec-
torial subtraction of the robot’s own heading. In effect,
the VHS virtually senses the relative headings of the
neighboring robots. This information can then be used for
aligning the robot with its neighbors. We would like to
note that the VHS does not assume the sensing of the
absolute North direction.
(a) (b)
Fig. 1 a The scaled sketch of Kobot. The rectangles indicate the IR
sensors located around the base. The discretized gray blob emanating
from the front IR sensor shows the sensing range of the sensor. b The
body-fixed reference frame. The x-axis coincides with the rotation
axis of the wheels. The forward velocity (u) is the velocity of the
robot along its y-axis. x is the angular velocity. vR and vL are the
velocities of the right and left motors. The heading of the robot, as
measured by the virtual heading sensor (VHS), is h, which is the angle
of the y-axis with the sensed North direction (ns). l is the distance
between the wheels
Neural Comput & Applic
123

2.2 The simulation environment
A physics-based simulator, called the Controllable-Swarm
Simulator (CoSS) [52], shown in Fig. 2b, was used for
conducting experiments with more robots than physically
available and for longer durations than possible in our
physical experimental setups. CoSS is developed using the
ODE (Open Dynamics Engine, URL: http://www.ode.org)
physics engine. In a previous study [52], we have verified
that the experimental results obtained within CoSS are in
agreement with the ones obtained from Kobots.
The IRSS is modeled in the simulator according to
systematic experiments [52]. Meanwhile, the VHS is
modeled using three parameters, namely, the range of the
communication, the number of robots whose broadcasted
heading values can be received at one control step (referred
to as the VHS neighbors), and the noise in the VHS. The
range and the number of VHS neighbors are set to 20 m
and 20, respectively. The noise on the VHS with the vec-
torial noise model [14] by adding a random noise vector to
the heading measurements of each robot:
h0 ¼ \feih þ geinog
where h is the actual heading, g is the magnitude of the
noise vector, and no is its direction chosen from a Gaussian
distribution described by Nðl ¼ h; r ¼ �p2Þ: \ð:Þ calcu-
lates the argument of the resulting vector.
3 The steered flocking behavior
The steered flocking behavior is expressed as a weighted
vector sum of three terms:
a ¼ hþ b pþ c d
khþ b pþ c dk ð1Þ
where h is the heading alignment vector, p is the proximal
control vector, and d is the preferred direction vector. a is
the resultant desired heading vector, according to which a
robot calculates its own direction of motion. The relative
importance of the terms is controlled by b [ [0, ?), the
weight of the proximal control vector, and c [ [0, ?), the
weight of the direction preference vector.
3.1 Heading alignment
The heading alignment term, h, tries to align the robot with
the average heading of its neighbors and is calculated as:
h ¼P
j2N eihj
kP
j2N eihjk
where N denotes the set of VHS neighbors, hj is the
heading of the jth neighbor converted to the body-fixed
reference frame, and k � k calculates the Euclidean norm.
The heading values of the neighbors are obtained by the
VHS which collects the broadcasted heading values. These
values are then converted to the robot’s body-fixed refer-
ence frame by hj ¼ p2� ðhglobal
j � hÞ, where h is the robot’s
own heading measurement.
3.2 Proximal control
The proximal control term uses the IRSS readings to
maintain cohesion within the flock, as well as to prevent
collisions between the robots and with obstacles. To this
end, the kth IR sensor is assumed to generate a virtual
force, fk, which is defined as:
fk ¼�ðok�odesÞ2
C if ok � odes
ðok�odesÞ2C otherwise
(
ð2Þ
where C is a scaling constant (10 for rk = 1, 35 for rk = 0).
The proximal control vector, p, is computed as the
vector sum of the forces acting through the eight IR
sensors:
p ¼ 1
8
X
k
fkei/k ð3Þ
where k 2 f0; 1; . . .; 7g is the index of the sensor which is
located at /k ¼ p4k with the x-axis of the body-fixed ref-
erence frame.
Fig. 2 a A photo of 7 Kobots.
The digital compass modules
are placed on top of the plastic
masts of the robots in order to
minimize electromagnetic
interference from the body.
b A snapshot from CoSS
Neural Comput & Applic
123

3.3 Direction preference
The direction preference vector, d, acts as a bias to
incorporate external guidance and is calculated as:
d ¼ dp � ac
where ac is the current heading vector of the robot coin-
cident with the y-axis of the body-fixed reference frame
and dp is the desired heading direction.
The weight of the direction preference term (c) is set to
0 in naive individuals and to a non-zero positive value in
informed ones.
3.4 Motion control
At each control step, a robot updates its forward (u), and
angular (x) velocities using the instantaneous desired
heading vector, a. The forward speed is calculated as:
u ¼ ða � acÞumax if a � ac� 0
0 otherwise
�
ð4Þ
where a and ac denote the desired and current heading
vectors, modulating the umax the maximum forward
velocity of the robot.
x ¼ ð\ac � \aÞKp ð5Þ
where Kp is the proportionality constant of the controller.
The rotational speeds of the right and left motors
(Fig. 1b) are calculated as:
NR ¼ u� x2
l� � 60
2pr; NL ¼ uþ x
2l
� � 60
2pr
where NR and NL are the rotational speeds (rotations per
minute) of the right and left motors, respectively, l is the
distance between the wheels of the robot (meters), u is the
forward velocity (meters per second) and x is the angular
velocity (radians per second).
4 Metrics
We propose three metrics to quantify the performance
steered flocking: namely, (1) the mutual information met-
ric, used for analyzing the time evolution of information
sharing between the informed and the naive robots, (2) the
accuracy of the flock in following the desired direction, and
(3) the ratio of the largest aggregate to the whole flock and
the ratio of informed individuals remaining with the largest
aggregate, as a metric of flock cohesion.
4.1 Mutual information
The use of the mutual information concept in multi-agent
systems, was first suggested by Parunak et al. [39] as a
measure of correlation, through which the concepts of
coherent, collaborative, cooperative, competitive, and
coordinated can be defined. Recently, Sperati et al. [44]
used the mutual information between robots as a fitness
function to evolve coordinated behavior in a robot swarm.
They showed that maximizing mutual information in a
task-independent manner as the fitness function would
result in the emergence of coordination among the robots.
Sporns and Lungarella [45] used information theoretic
metrics, including mutual information, complexity, and
integration (the latter two metrics due to [51]) for evolving
coordinated behavior in a simulated creature. In all these
works, mutual information was shown to be a very effec-
tive, task-independent metric of shared information.
4.1.1 Formal definition
The mutual information gives ‘‘the reduction in uncertainty
of one variable due to knowledge of another. If knowledge
of Y reduces our uncertainty of X, then we say Y carries
information about X’’ [12]. Thus, it can be utilized as a
measure of the information transferred from an informed
robot to a naive one during flocking.
Mutual information is defined in terms of information
entropy. Adopting the notation of Feldman [12] and indi-
cating a discrete random variable with the capital letter X,
which can take values x 2 X , the mutual information is
defined as:
MI½X; Y� ¼ H½X� þ H½Y � � H½XY�¼ H½X� � H½XjY �¼ H½Y � � H½YjX�
where H[X] denotes the marginal information entropy of X,
H[XY] denotes the joint entropy of X and Y, and H[X|Y]
denotes the conditional entropy of X given Y. The complete
derivation is included in the ‘‘Appendix’’.
The mutual information metric has a number of favor-
able properties. First, MI[X, Y] is zero when there is no
statistical dependence between the two variables, in which
case H[XY] = H[X] ? H[Y], indicating no shared infor-
mation. Moreover, it is also zero when the marginal
entropies of the two variables H[X] and H[Y] are zero,
when there is already no uncertainty about either of the
variables. It is non-negative and bounded by some finite
maximum value. It is symmetric, that is MI[X, Y] =
MI[Y, X], agreeing with our intuition that information
sharing must be two-way. It has the capability of capturing
non-linear statistical dependencies, unlike other widely
utilized metrics such as Euclidean distance, the Pearson
coefficient, or covariance [44, 46]. For instance, quoting
from Steuer et al. [46], ‘‘a vanishing mutual information
does imply that two variables are independent, while for
Neural Comput & Applic
123

the Pearson correlation this does not hold’’. Finally, it can
be calculated as a function of time; therefore, it can be used
to analyze the time evolution of shared information in a
dynamical system.
4.1.2 Methodology
In this study, we measure the mutual information between
a (randomly chosen) informed and a (randomly chosen)
naive robot. We calculate the shared ‘‘information’’ in
terms of these robots’ ability to move in the same direction.
Specifically, we denote the heading values of the informed
robot and the naive robot by the random variable X and Y,
respectively. The state space of X and Y is infinite and must
be discretized. Parunak and Brueckner [38] pointed to the
importance of not dividing an infinite state space into too
many states, in which case the possibility of observing two
random variables in the same state would be ‘‘vanishingly
small’’. Another issue is the concern of statistical signifi-
cance when trying to obtain the probability distribution of a
random variable from a finite number of observations. In
[26], it was suggested that three times more samples than
the possible states of a variable must be observed for a
faithful estimation of the probability distribution of the
variable. In light of these concerns, we divide the unit
circle into 8 discrete intervals of p/4 radians, and therefore
the number of states that an informed-naive robot pair can
be in becomes 8 9 8. We conduct 200 [ 3 9 8 9 8
experiments for estimating the probability distributions,
which provides us with a safe range for estimating the joint
probability distribution. In order to capture the dynamic
aspects of the shared information, we calculate the proba-
bility distributions p(X), p(Y), and p(X, Y) separately at
each time step. Our expectation is that X and Y will be
independent of each other at the initial phases of the
experiments and will become correlated as time advances,
provided that the necessary conditions are supplied.
Finally, we would like to note that the maximum value of
the mutual information metric, determined by the quanti-
zation of the heading state, is 3 (see ‘‘Appendix’’).
4.1.3 Finite size effects
A final issue about the calculation of the mutual informa-
tion is the bias introduced by the observation of a finite
number of samples. It was pointed out that when the
entropy of a random variable is estimated from the obser-
vation of a finite number of samples, the estimation is
‘‘systematically biased downwards’’ [13] and that this bias
can be removed from the estimated entropies [46] as:
H½X� ¼ ~H½X� þ a� 1
2 � b
where ~H½X� is the estimated entropy, a is the number of
discretized states of the random variable X, b is the number
of observed samples, and H[X] is the true entropy.
4.2 Accuracy
The mutual information metric can only measure the
degree of alignment between the informed and naive robots
and has no notion of the desired direction. Therefore, it
cannot distinguish whether a commonly converged upon
direction is also aligned with the desired direction. Toward
this end, we adopt the accuracy metric of Couzin et al. [6]
to measure the flock’s degree of alignment with the desired
direction.
4.2.1 Formal definition
The accuracy metric depends on the angular deviation of
the direction of the flock from the desired direction. The
angular deviation is analogous to the standard deviation
from linear statistics for inherently directional data, and the
accuracy metric can be defined as:
Accuracy ¼ 1� S00=2
where S0
0denotes the angular deviation of a group of
vectors from a desired direction. The complete derivation
is included in the ‘‘Appendix’’. The accuracy metric
becomes 1 when the angular deviation is minimum and 0
when the angular deviation is maximum. We expect the
accuracy metric to be as high as possible in a desired
scenario.
4.2.2 Methodology
The accuracy is calculated via two different methods. In
the steady- state analyses, the direction of motion is cal-
culated for each experiment. The direction of motion is
defined as the direction vector between the position of the
center of mass at times t and tf, where time t marks a
moment in the steady-state phase and tf is the end of the
experiment. Therefore, we do not consider the transient
dynamics of the system, and only consider the converged
direction of motion.
Once the direction of motion is calculated for all
experiments conducted with a certain parameter set, we
compute the angular deviation, where each sample vector
corresponds to the direction of motion in one experiment.
We then calculate a single steady-state accuracy value
which measures the overall performance in all the
experiments.
In the transient analyses, we vectorially sum the heading
values of individual robots and obtain the average heading
of the flock at each time step in every experiment. In order
Neural Comput & Applic
123

to calculate the angular deviation at each time step, we take
the average heading vector of the flock at each experiment
as a sample vector. We thus plot the time evolution of the
accuracy associated with these experiments. In Kobot
experiments, the tracking of the center of mass of the flock
of a moving flock was not possible and hence we used
the scheme used in the transient analyses, by collecting the
heading values of individual robots and extracting the
accuracy from the average heading of the flock. Since
the accuracy metric is already a measure of variance, error
bars are not shown in the plots.
4.3 Largest aggregate
The cohesiveness of the flock can be captured by analyzing
connected aggregates. Specifically we used the ratio of the
largest aggregate to the whole flock and the ratio of
informed individuals remaining with the largest aggregate
(denoted by /), as a combined metric of flock cohesion.
4.3.1 Formal definition
Assuming that the swarm is represented by a graph
G ¼ ðV; EÞ, the set of vertices V ¼ 1; 2; . . .; n denote the
robots. The set of edges E � fði; jÞ : i; j 2 V; i 6¼ jg con-
tains the pair (i, j) if robots i and j are within IR sensing
range of each other. The partitioning of the graph into
connected aggregates is then conducted as in Algorithm 1.
Algorithm 1 The clustering algorithm
1: initialize n aggregates with Ai ¼ fvig2: while 9Ai;Aj such that i 6¼ j; k 2 Ai; l 2 Ajðk; lÞ 2 E do
3: merge Ai and Aj
4: end while
5 Experimental results
We implemented the steered flocking behavior using the
following behavioral parameters on both simulated and
physical robots: namely, b = 4, umax = 7cm/s, Kp = 0.5,
odes set to 3 for kin-robots and 0 for obstacles. The sensi-
tivity analysis for these parameters had previously been
conducted in [52], and the optimal parameter set is utilized
here. In the simulations, the g parameter, which sets the
amount of heading noise in VHS, is set to 1. We denote the
ratio of informed robots in the flock as q. We will now
present three experiments conducted with physical and
simulated robots in order to provide a preliminary dem-
onstration of the behavior before moving on to quantitative
evaluations. In these experiments, we set the weight of the
direction preference vector c = 1.
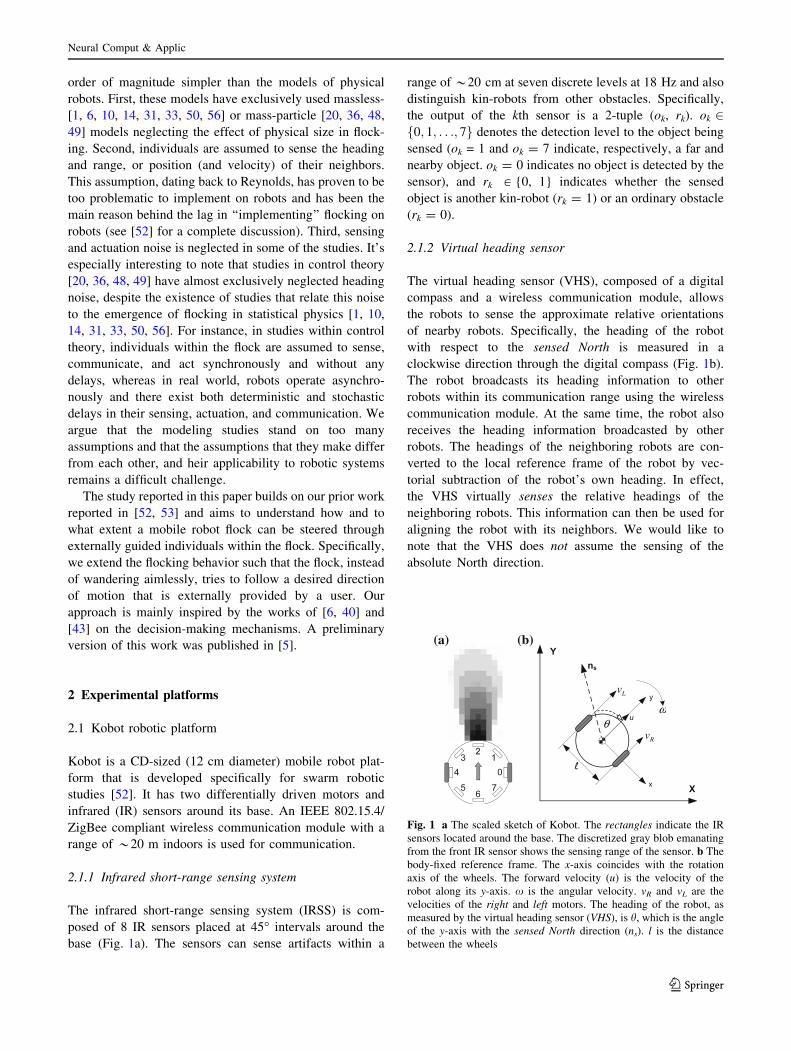
Figure 3 shows snapshots from a sample scenario with
Kobots. Initially, all the robots in the group are naive (hence
no preferred direction), and the flock self-organizes to move
as a whole toward the upper right part of the view as shown
in the leftmost snapshot. Then, at the time of the second
snapshot, 4 of the 7 Kobots are ‘‘informed’’ by an external
user that the preferred direction of motion is 90� to the right
of their individual current headings. Since the Kobots have
already aligned their headings previously, this creates the
effect of their all turning to the same direction simulta-
neously. Through the local interactions of these informed
robots, the flock is steered to move toward the lower right
part of the view as can be seen in the last snapshot.
In order to demonstrate the transient performance of the
behavior in complying with the extreme changes in the
preferred directions, we conducted three experiments using
Kobots with the informed robot ratio q set to 2/7, 4/7, and
7/7. In these experiments, the preferred directions of the
informed Kobots are reversed every 30 s. The headings of
all the robots during each of these experiments are shown
in circular plots in Fig. 4. As expected, with each reversal
of preferred direction, the flock goes through a transition,
which can be seen as tails within the circular bands. As q,
the ratio of informed robots, increases the tails become
shorter, indicating that the flock becomes aligned with the
preferred direction faster.
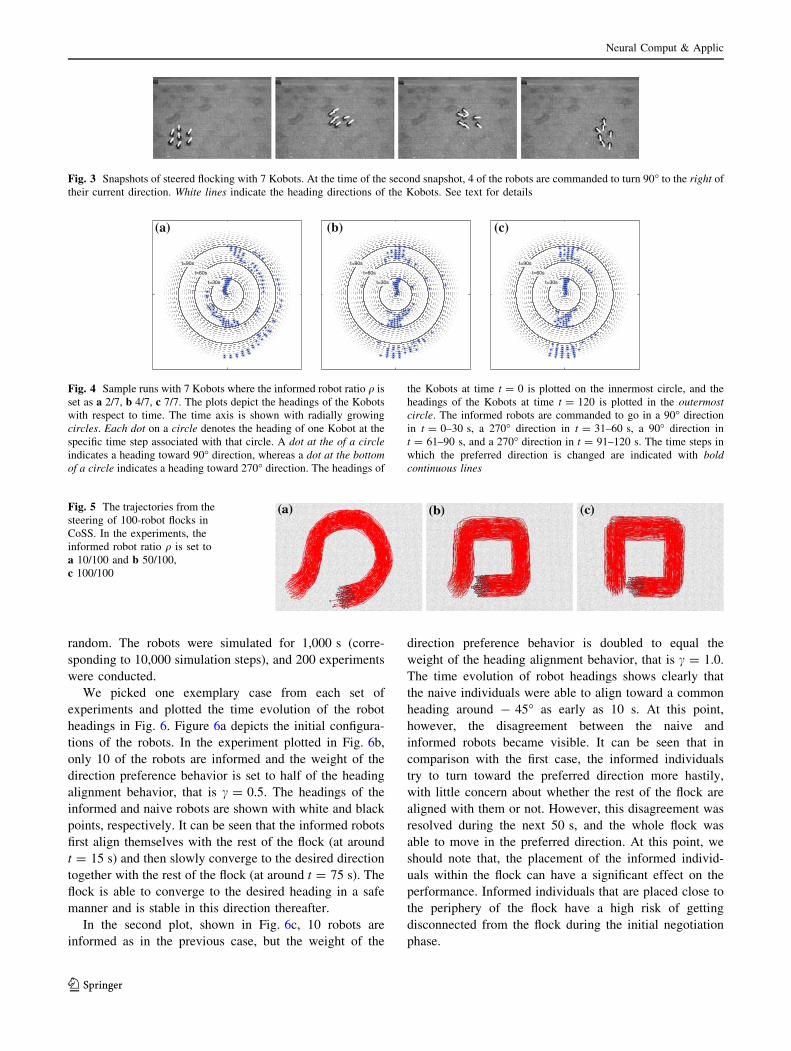
Figure 5 shows the recorded robot trajectories from the
steering of 100-robot flocks in CoSS with the informed
robot ratio q set as (a) 10/100, (b) 50/100, (c) 100/100. The
direction preference vectors for informed robots are set to
90� (indicating upwards) 0� (indicating left), 270� (indi-
cating downwards), and 180� (indicating right) at times 0,
120, 240, and 360 s, respectively. The small, black circles
show the robots, whereas the (red) traces indicate their
trajectories. It can be seen that in all three cases, the flock
can be steered along the desired direction, despite the ratio
of informed robots being as low as q = 10/100 in the first
case. As expected, the response to changes in the preferred
direction is more rapid in the q = 50/100 and q = 100/100
cases.
5.1 Transient characteristics
We analyze the transient characteristics of steered flocking
using 100 simulated robots in four sets of experiments,
namely, set 1: [q = 10/100, c = 0.5], set 2: [q = 10/100,
c = 1.0], set 3: [q = 1/100, c = 1.0], and set 4: [q =
1/100, c = 10.0]. The robots were initialized in a hexag-
onal formation with 25 cm inter-robot distances at random
orientations and the desired heading for the informed
robots was set as 90�. The informed robots were picked at
Neural Comput & Applic
123
random. The robots were simulated for 1,000 s (corre-
sponding to 10,000 simulation steps), and 200 experiments
were conducted.
We picked one exemplary case from each set of
experiments and plotted the time evolution of the robot
headings in Fig. 6. Figure 6a depicts the initial configura-
tions of the robots. In the experiment plotted in Fig. 6b,
only 10 of the robots are informed and the weight of the
direction preference behavior is set to half of the heading
alignment behavior, that is c = 0.5. The headings of the
informed and naive robots are shown with white and black
points, respectively. It can be seen that the informed robots
first align themselves with the rest of the flock (at around
t = 15 s) and then slowly converge to the desired direction
together with the rest of the flock (at around t = 75 s). The
flock is able to converge to the desired heading in a safe
manner and is stable in this direction thereafter.
In the second plot, shown in Fig. 6c, 10 robots are
informed as in the previous case, but the weight of the
direction preference behavior is doubled to equal the
weight of the heading alignment behavior, that is c = 1.0.
The time evolution of robot headings shows clearly that
the naive individuals were able to align toward a common
heading around - 45� as early as 10 s. At this point,
however, the disagreement between the naive and
informed robots became visible. It can be seen that in
comparison with the first case, the informed individuals
try to turn toward the preferred direction more hastily,
with little concern about whether the rest of the flock are
aligned with them or not. However, this disagreement was
resolved during the next 50 s, and the whole flock was
able to move in the preferred direction. At this point, we
should note that, the placement of the informed individ-
uals within the flock can have a significant effect on the
performance. Informed individuals that are placed close to
the periphery of the flock have a high risk of getting
disconnected from the flock during the initial negotiation
phase.
Fig. 3 Snapshots of steered flocking with 7 Kobots. At the time of the second snapshot, 4 of the robots are commanded to turn 90� to the right of
their current direction. White lines indicate the heading directions of the Kobots. See text for details
(a) (b) (c)
Fig. 4 Sample runs with 7 Kobots where the informed robot ratio q is
set as a 2/7, b 4/7, c 7/7. The plots depict the headings of the Kobots
with respect to time. The time axis is shown with radially growing
circles. Each dot on a circle denotes the heading of one Kobot at the
specific time step associated with that circle. A dot at the of a circleindicates a heading toward 90� direction, whereas a dot at the bottomof a circle indicates a heading toward 270� direction. The headings of
the Kobots at time t = 0 is plotted on the innermost circle, and the
headings of the Kobots at time t = 120 is plotted in the outermostcircle. The informed robots are commanded to go in a 90� direction
in t = 0–30 s, a 270� direction in t = 31–60 s, a 90� direction in
t = 61–90 s, and a 270� direction in t = 91–120 s. The time steps in
which the preferred direction is changed are indicated with boldcontinuous lines
Fig. 5 The trajectories from the
steering of 100-robot flocks in
CoSS. In the experiments, the
informed robot ratio q is set to
a 10/100 and b 50/100,
c 100/100
Neural Comput & Applic
123
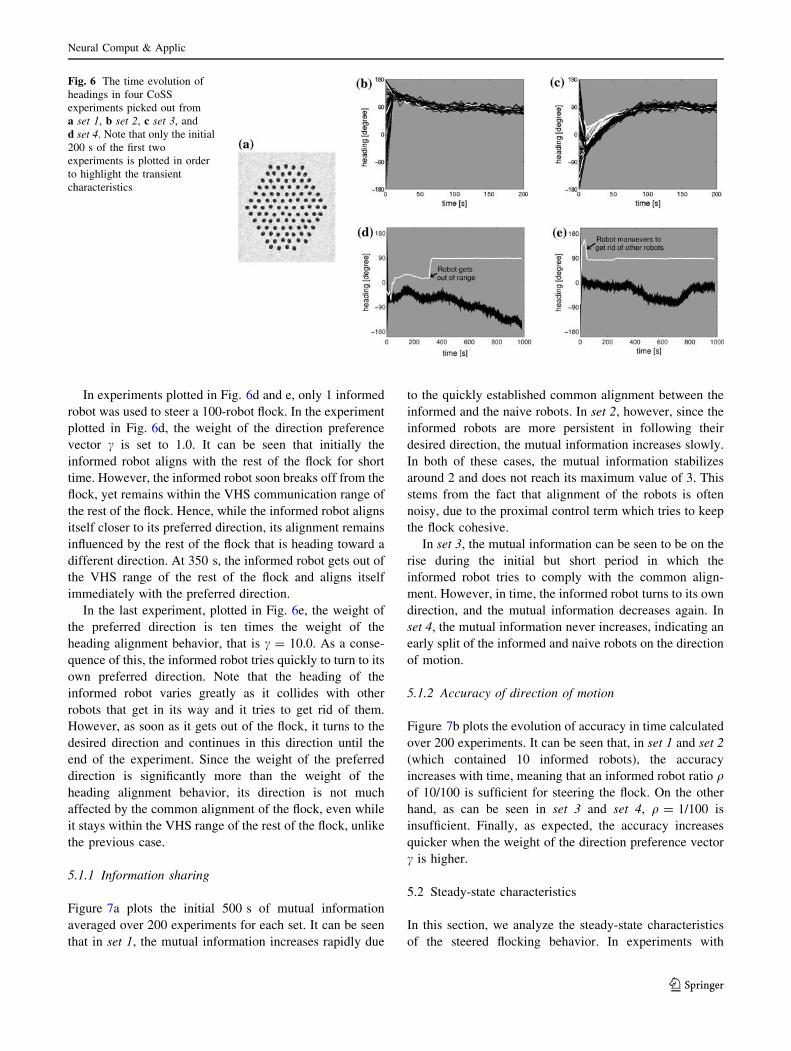
In experiments plotted in Fig. 6d and e, only 1 informed
robot was used to steer a 100-robot flock. In the experiment
plotted in Fig. 6d, the weight of the direction preference
vector c is set to 1.0. It can be seen that initially the
informed robot aligns with the rest of the flock for short
time. However, the informed robot soon breaks off from the
flock, yet remains within the VHS communication range of
the rest of the flock. Hence, while the informed robot aligns
itself closer to its preferred direction, its alignment remains
influenced by the rest of the flock that is heading toward a
different direction. At 350 s, the informed robot gets out of
the VHS range of the rest of the flock and aligns itself
immediately with the preferred direction.
In the last experiment, plotted in Fig. 6e, the weight of
the preferred direction is ten times the weight of the
heading alignment behavior, that is c = 10.0. As a conse-
quence of this, the informed robot tries quickly to turn to its
own preferred direction. Note that the heading of the
informed robot varies greatly as it collides with other
robots that get in its way and it tries to get rid of them.
However, as soon as it gets out of the flock, it turns to the
desired direction and continues in this direction until the
end of the experiment. Since the weight of the preferred
direction is significantly more than the weight of the
heading alignment behavior, its direction is not much
affected by the common alignment of the flock, even while
it stays within the VHS range of the rest of the flock, unlike
the previous case.
5.1.1 Information sharing
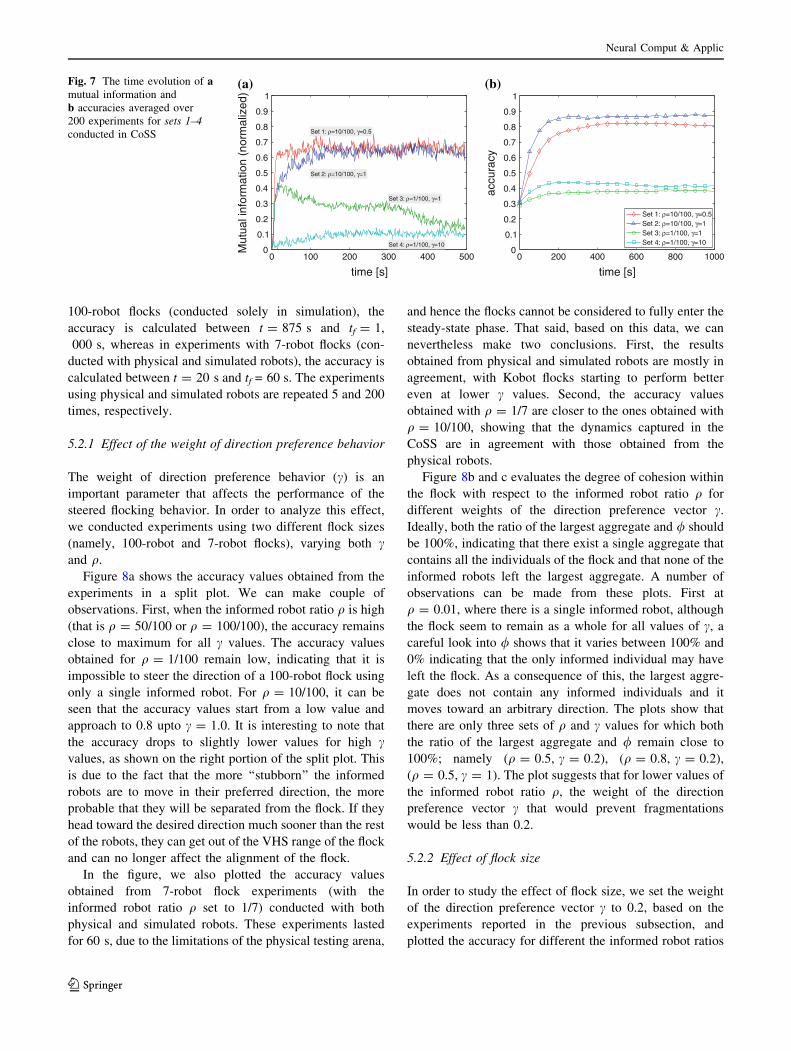
Figure 7a plots the initial 500 s of mutual information
averaged over 200 experiments for each set. It can be seen
that in set 1, the mutual information increases rapidly due
to the quickly established common alignment between the
informed and the naive robots. In set 2, however, since the
informed robots are more persistent in following their
desired direction, the mutual information increases slowly.
In both of these cases, the mutual information stabilizes
around 2 and does not reach its maximum value of 3. This
stems from the fact that alignment of the robots is often
noisy, due to the proximal control term which tries to keep
the flock cohesive.
In set 3, the mutual information can be seen to be on the
rise during the initial but short period in which the
informed robot tries to comply with the common align-
ment. However, in time, the informed robot turns to its own
direction, and the mutual information decreases again. In
set 4, the mutual information never increases, indicating an
early split of the informed and naive robots on the direction
of motion.
5.1.2 Accuracy of direction of motion
Figure 7b plots the evolution of accuracy in time calculated
over 200 experiments. It can be seen that, in set 1 and set 2
(which contained 10 informed robots), the accuracy
increases with time, meaning that an informed robot ratio qof 10/100 is sufficient for steering the flock. On the other
hand, as can be seen in set 3 and set 4, q = 1/100 is
insufficient. Finally, as expected, the accuracy increases
quicker when the weight of the direction preference vector
c is higher.
5.2 Steady-state characteristics
In this section, we analyze the steady-state characteristics
of the steered flocking behavior. In experiments with
Fig. 6 The time evolution of
headings in four CoSS
experiments picked out from
a set 1, b set 2, c set 3, and
d set 4. Note that only the initial
200 s of the first two
experiments is plotted in order
to highlight the transient
characteristics
Neural Comput & Applic
123
100-robot flocks (conducted solely in simulation), the
accuracy is calculated between t = 875 s and tf = 1,
000 s, whereas in experiments with 7-robot flocks (con-
ducted with physical and simulated robots), the accuracy is
calculated between t = 20 s and tf = 60 s. The experiments
using physical and simulated robots are repeated 5 and 200
times, respectively.
5.2.1 Effect of the weight of direction preference behavior
The weight of direction preference behavior (c) is an
important parameter that affects the performance of the
steered flocking behavior. In order to analyze this effect,
we conducted experiments using two different flock sizes
(namely, 100-robot and 7-robot flocks), varying both cand q.
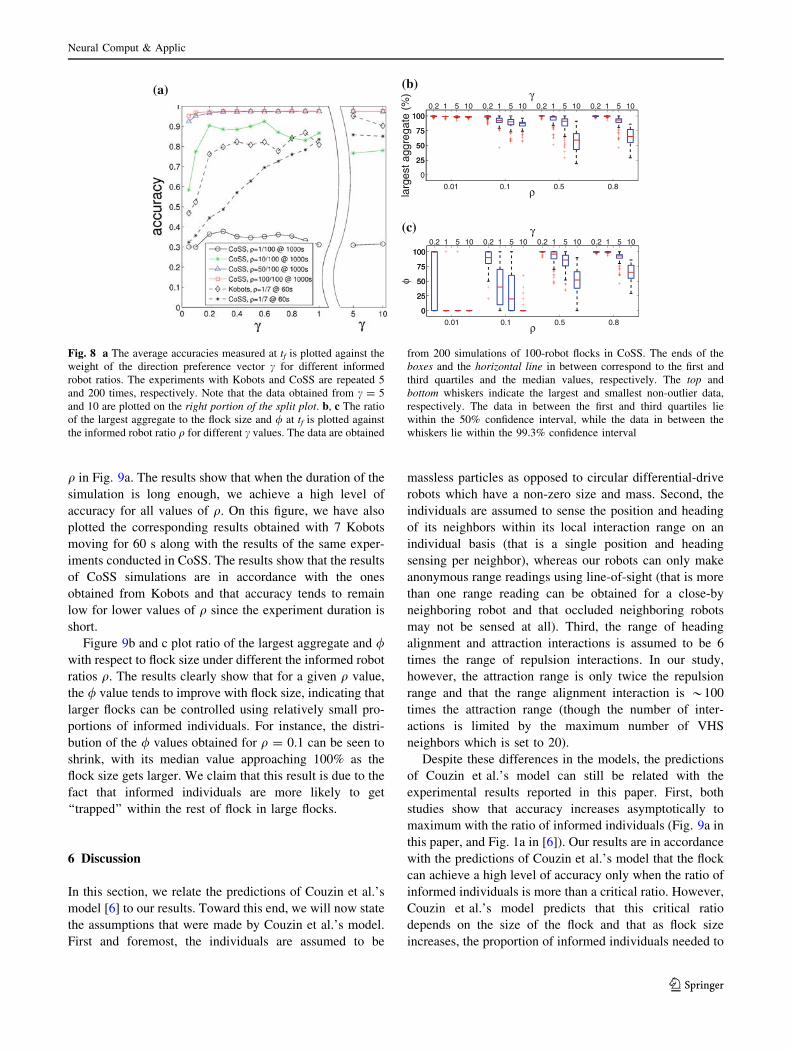
Figure 8a shows the accuracy values obtained from the
experiments in a split plot. We can make couple of
observations. First, when the informed robot ratio q is high
(that is q = 50/100 or q = 100/100), the accuracy remains
close to maximum for all c values. The accuracy values
obtained for q = 1/100 remain low, indicating that it is
impossible to steer the direction of a 100-robot flock using
only a single informed robot. For q = 10/100, it can be
seen that the accuracy values start from a low value and
approach to 0.8 upto c = 1.0. It is interesting to note that
the accuracy drops to slightly lower values for high cvalues, as shown on the right portion of the split plot. This
is due to the fact that the more ‘‘stubborn’’ the informed
robots are to move in their preferred direction, the more
probable that they will be separated from the flock. If they
head toward the desired direction much sooner than the rest
of the robots, they can get out of the VHS range of the flock
and can no longer affect the alignment of the flock.
In the figure, we also plotted the accuracy values
obtained from 7-robot flock experiments (with the
informed robot ratio q set to 1/7) conducted with both
physical and simulated robots. These experiments lasted
for 60 s, due to the limitations of the physical testing arena,
and hence the flocks cannot be considered to fully enter the
steady-state phase. That said, based on this data, we can
nevertheless make two conclusions. First, the results
obtained from physical and simulated robots are mostly in
agreement, with Kobot flocks starting to perform better
even at lower c values. Second, the accuracy values
obtained with q = 1/7 are closer to the ones obtained with
q = 10/100, showing that the dynamics captured in the
CoSS are in agreement with those obtained from the
physical robots.
Figure 8b and c evaluates the degree of cohesion within
the flock with respect to the informed robot ratio q for
different weights of the direction preference vector c.
Ideally, both the ratio of the largest aggregate and / should
be 100%, indicating that there exist a single aggregate that
contains all the individuals of the flock and that none of the
informed robots left the largest aggregate. A number of
observations can be made from these plots. First at
q = 0.01, where there is a single informed robot, although
the flock seem to remain as a whole for all values of c, a
careful look into / shows that it varies between 100% and
0% indicating that the only informed individual may have
left the flock. As a consequence of this, the largest aggre-
gate does not contain any informed individuals and it
moves toward an arbitrary direction. The plots show that
there are only three sets of q and c values for which both
the ratio of the largest aggregate and / remain close to
100%; namely (q = 0.5, c = 0.2), (q = 0.8, c = 0.2),
(q = 0.5, c = 1). The plot suggests that for lower values of
the informed robot ratio q, the weight of the direction
preference vector c that would prevent fragmentations
would be less than 0.2.
5.2.2 Effect of flock size
In order to study the effect of flock size, we set the weight
of the direction preference vector c to 0.2, based on the
experiments reported in the previous subsection, and
plotted the accuracy for different the informed robot ratios
(a) (b)Fig. 7 The time evolution of amutual information and
b accuracies averaged over
200 experiments for sets 1–4conducted in CoSS
Neural Comput & Applic
123
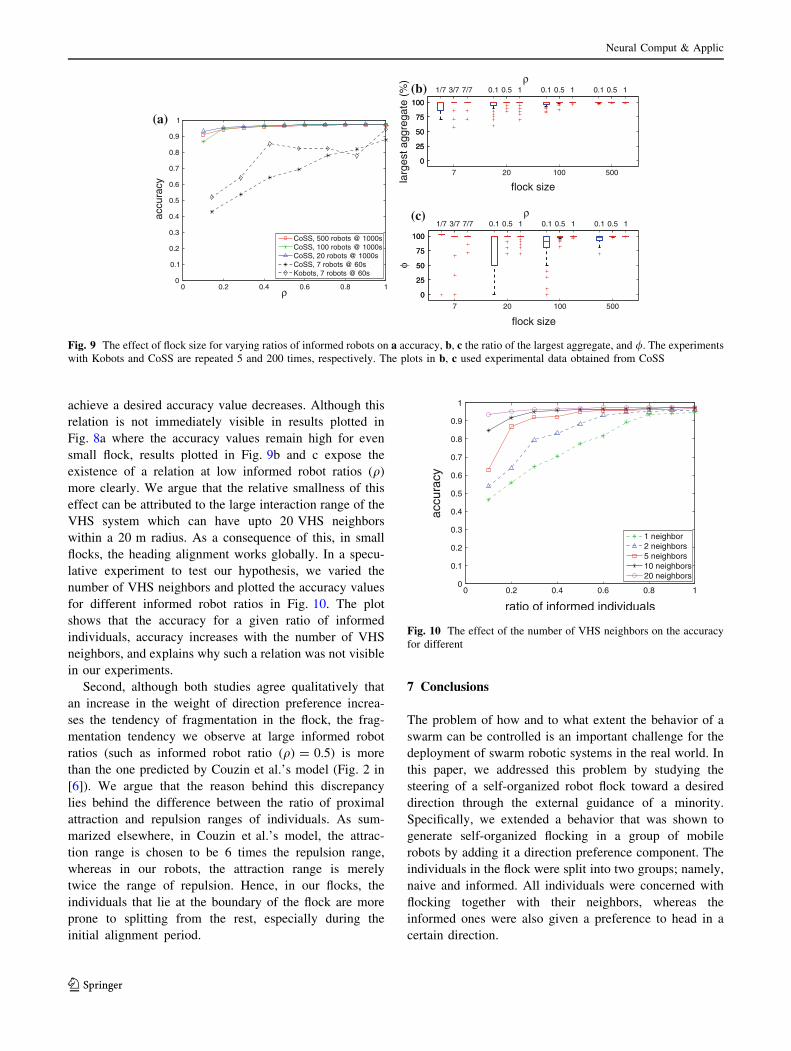
q in Fig. 9a. The results show that when the duration of the
simulation is long enough, we achieve a high level of
accuracy for all values of q. On this figure, we have also
plotted the corresponding results obtained with 7 Kobots
moving for 60 s along with the results of the same exper-
iments conducted in CoSS. The results show that the results
of CoSS simulations are in accordance with the ones
obtained from Kobots and that accuracy tends to remain
low for lower values of q since the experiment duration is
short.
Figure 9b and c plot ratio of the largest aggregate and /with respect to flock size under different the informed robot
ratios q. The results clearly show that for a given q value,
the / value tends to improve with flock size, indicating that
larger flocks can be controlled using relatively small pro-
portions of informed individuals. For instance, the distri-
bution of the / values obtained for q = 0.1 can be seen to
shrink, with its median value approaching 100% as the
flock size gets larger. We claim that this result is due to the
fact that informed individuals are more likely to get
‘‘trapped’’ within the rest of flock in large flocks.
6 Discussion
In this section, we relate the predictions of Couzin et al.’s
model [6] to our results. Toward this end, we will now state
the assumptions that were made by Couzin et al.’s model.
First and foremost, the individuals are assumed to be
massless particles as opposed to circular differential-drive
robots which have a non-zero size and mass. Second, the
individuals are assumed to sense the position and heading
of its neighbors within its local interaction range on an
individual basis (that is a single position and heading
sensing per neighbor), whereas our robots can only make
anonymous range readings using line-of-sight (that is more
than one range reading can be obtained for a close-by
neighboring robot and that occluded neighboring robots
may not be sensed at all). Third, the range of heading
alignment and attraction interactions is assumed to be 6
times the range of repulsion interactions. In our study,
however, the attraction range is only twice the repulsion
range and that the range alignment interaction is *100
times the attraction range (though the number of inter-
actions is limited by the maximum number of VHS
neighbors which is set to 20).
Despite these differences in the models, the predictions
of Couzin et al.’s model can still be related with the
experimental results reported in this paper. First, both
studies show that accuracy increases asymptotically to
maximum with the ratio of informed individuals (Fig. 9a in
this paper, and Fig. 1a in [6]). Our results are in accordance
with the predictions of Couzin et al.’s model that the flock
can achieve a high level of accuracy only when the ratio of
informed individuals is more than a critical ratio. However,
Couzin et al.’s model predicts that this critical ratio
depends on the size of the flock and that as flock size
increases, the proportion of informed individuals needed to
(a) (b)
(c)
Fig. 8 a The average accuracies measured at tf is plotted against the
weight of the direction preference vector c for different informed
robot ratios. The experiments with Kobots and CoSS are repeated 5
and 200 times, respectively. Note that the data obtained from c = 5
and 10 are plotted on the right portion of the split plot. b, c The ratio
of the largest aggregate to the flock size and / at tf is plotted against
the informed robot ratio q for different c values. The data are obtained
from 200 simulations of 100-robot flocks in CoSS. The ends of the
boxes and the horizontal line in between correspond to the first and
third quartiles and the median values, respectively. The top and
bottom whiskers indicate the largest and smallest non-outlier data,
respectively. The data in between the first and third quartiles lie
within the 50% confidence interval, while the data in between the
whiskers lie within the 99.3% confidence interval
Neural Comput & Applic
123
achieve a desired accuracy value decreases. Although this
relation is not immediately visible in results plotted in
Fig. 8a where the accuracy values remain high for even
small flock, results plotted in Fig. 9b and c expose the
existence of a relation at low informed robot ratios (q)
more clearly. We argue that the relative smallness of this
effect can be attributed to the large interaction range of the
VHS system which can have upto 20 VHS neighbors
within a 20 m radius. As a consequence of this, in small
flocks, the heading alignment works globally. In a specu-
lative experiment to test our hypothesis, we varied the
number of VHS neighbors and plotted the accuracy values
for different informed robot ratios in Fig. 10. The plot
shows that the accuracy for a given ratio of informed
individuals, accuracy increases with the number of VHS
neighbors, and explains why such a relation was not visible
in our experiments.
Second, although both studies agree qualitatively that
an increase in the weight of direction preference increa-
ses the tendency of fragmentation in the flock, the frag-
mentation tendency we observe at large informed robot
ratios (such as informed robot ratio (q) = 0.5) is more
than the one predicted by Couzin et al.’s model (Fig. 2 in
[6]). We argue that the reason behind this discrepancy
lies behind the difference between the ratio of proximal
attraction and repulsion ranges of individuals. As sum-
marized elsewhere, in Couzin et al.’s model, the attrac-
tion range is chosen to be 6 times the repulsion range,
whereas in our robots, the attraction range is merely
twice the range of repulsion. Hence, in our flocks, the
individuals that lie at the boundary of the flock are more
prone to splitting from the rest, especially during the
initial alignment period.
7 Conclusions
The problem of how and to what extent the behavior of a
swarm can be controlled is an important challenge for the
deployment of swarm robotic systems in the real world. In
this paper, we addressed this problem by studying the
steering of a self-organized robot flock toward a desired
direction through the external guidance of a minority.
Specifically, we extended a behavior that was shown to
generate self-organized flocking in a group of mobile
robots by adding it a direction preference component. The
individuals in the flock were split into two groups; namely,
naive and informed. All individuals were concerned with
flocking together with their neighbors, whereas the
informed ones were also given a preference to head in a
certain direction.
(a)
(b)
(c)
Fig. 9 The effect of flock size for varying ratios of informed robots on a accuracy, b, c the ratio of the largest aggregate, and /. The experiments
with Kobots and CoSS are repeated 5 and 200 times, respectively. The plots in b, c used experimental data obtained from CoSS
Fig. 10 The effect of the number of VHS neighbors on the accuracy
for different
Neural Comput & Applic
123

In this case, the tendency to flock together represented
the underlying self-organized dynamics of the swarm,
whereas the preference of some individuals to head in a
certain direction represented the dynamics induced by
external control. These two dynamics conflict with each
other, and the tension between them was analyzed to
determine the extent of external control that can be
applied. To this end, we proposed to use three metrics in
our analysis: (1) The ratio of the largest aggregate to the
whole flock and the ratio of informed individuals
remaining with the largest aggregate were used as a
combined metric of how well the underlying self-orga-
nized flocking dynamics was preserved. (2) The accuracy
metric measuring how the flock was aligned with the
preferred direction of informed individuals was used to
quantify the performance of the dynamics induced by
external control. (3) The mutual information metric to
quantify the extent of interaction between these two
dynamics. Based on these metrics, a flock can be said to
be steer-able if it can maintain its cohesion as a single
aggregate containing most of the informed individuals and
yet turn its heading toward the preferred direction, max-
imizing the mutual information between its informed and
naive individuals.
We conducted a series of experiments conducted with
physical robots and in physics-based simulation. Specifi-
cally we varied the weight of the direction preference
behavior, the ratio of informed individuals as well as the
size of the flock, and analyzed the extent of steer-ability of
flocks. From these experiments, we can draw a number of
conclusions. First, the steer-ability of a flock of a given size
is determined by the ratio of informed individuals as well
as the weight of the direction preference behavior. It is
shown to improve with the ratio of informed individuals in
the group as expected. When the weight of the direction
preference behavior is small, although the flock can
maintain its cohesion, the responsiveness of the flock to
turn into a desired direction decreases, along with the
accuracy of the flock at steady state. On the other hand,
when the weight becomes too large, then the flock can no
longer maintain its cohesion, since the informed individu-
als are likely to split away from the group. Therefore, there
exists an optimum value for the weight of the direction
preference behavior for a given ratio of informed individ-
uals. Second, for a given ratio of informed individuals, the
steer-ability of the flock increases with the size of the flock.
Although it may seem surprising at a first glance, this result
stems from the physical embodiment of the individuals and
that informed individuals are more likely to get ‘‘trapped?
in large flocks. Third, the steer-ability of a given flock
increases with the number of neighbors individuals per-
ceive for alignment (a.k.a number of VHS neighbors),
since it increases the mutual information between informed
and naive individuals.
This study can be extended on a number of fronts. First,
the flocking behavior can be modified to improve the
strength of cohesion by creating a virtual ‘‘surface tension’’
on the periphery of the flock. Second, the informed indi-
viduals can compute the mutual information between
themselves and the rest of the flock using VHS and use it to
adapt the weight of their direction preference behavior
during steering. Third, the ‘‘unacknowledged leadership’’
constraint, which was inspired from related studies in
biology, can be removed in swarm robotic systems in order
to improve the controllability of the flock. Fourth, the
dynamics of steering, in the presence of individuals with
different preferred directions needs to be investigated. In
addition to these, the dynamics of the flocking needs to be
analyzed from a theoretical perspective. Toward this end,
we have already extended the VNM model that was
developed in Statistical Physics (briefly reviewed in Sect.
1.1) to model the phase transition of the robots from an
unordered state (where all the robots have different head-
ings) to an ordered state (where all robots are aligned) in
the existence of noise [54]. We plan to extend this model to
the phase (which starts automatically after all the robots are
aligned), where the robots start moving together.
Acknowledgments This work is funded by TUB_ITAK (Turkish
Scientific and Technical Council) through the ‘‘KAR_IYER: Kontrol
Edilebilir Robot Ogulları’’ project with number 104E066. Addition-
ally, Hande Celikkanat acknowledges the partial support of the
TUB_ITAK graduate student fellowship. The simulations have been
performed on the High Performance Computing Center of the
Department of Computer Engineering, Middle East Technical
University.
Appendix
Mutual Information: Adopting the notation of Feldman
[12] and indicating a discrete random variable with the
capital letter X, which can take values x 2 X , the infor-
mation entropy is defined as:
H½X� ¼ �X
x2XpðxÞ � log2 pðxÞ
where p(x) is the probability that X will take the value of x.
H[X] is also called the marginal entropy of X, since it
depends on only the marginal probability of one random
variable. The marginal entropy of the random variable X is
zero if X always assumes the same value with p(X = x0) = 1
and maximum if X assumes all possible states with equal
probability. Having defined the marginal entropy of a
single random variable, this definition is easily extended to
the joint entropy of two random variables:
Neural Comput & Applic
123

H½XY � ¼ �X
x2X
X
y2Ypðx; yÞ � log2 pðx; yÞ
as well as the conditional entropy of these two random
variables:
H½XjY � ¼ �X
x2X
X
y2Ypðx; yÞ � log2 pðxjyÞ
where p(x, y) is the joint probability that X will take the
value of x and Y will take the value of y, and p(x | y) is the
conditional probability that X will take the value of x given
that Y takes the value of y. Thus, the conditional entropy is
the entropy of X, given that Y is known.
Then, the mutual information MI[X, Y] is defined as:
MI½X; Y � ¼ �X
x2X
X
y2Ypðx; yÞ � log2
pðxÞ:pðyÞpðx; yÞ
or equivalently,
MI½X; Y� ¼ H½X� þ H½Y � � H½XY�¼ H½X� � H½XjY �¼ H½Y � � H½YjX�:
When p(x|y) becomes 1, the mutual information
MI[X, Y] is maximized to be H[X]. Note that, the value
of H[X] depends on the discretization of x. For instance, if
the value of random variable x is discretized into 8, then
p(x) becomes 18
leading to H½X� ¼ �8 � 18� log2
18¼ 3:
Angular Deviation: The angular deviation is calculated
as follows [29]. Let h1...hn denote a set of unit vectors
whose angular deviation is to be calculated. Then, their
(normalized) mean vector is the vector from (0, 0) to
ð �C; �SÞ, where
�C ¼ 1
n
Xn
i¼1
cos hi; �S ¼ 1
n
Xn
i¼1
sin hi:
Let �R ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�S2 þ �C2p
be the length of this normalized mean
vector and �x0 be its angle with the x-axis such that:
�C ¼ �R cos �x0; �S ¼ �R sin �x0:
Then, the angular deviation of these vectors around their
normalized mean vector is given by:
S0 ¼ 1� �R:
This intuitively means that the more aligned the vectors
are, i.e, the less the angular deviation is, the longer is the
mean vector. On the other hand, if they are scattered
around the unit circle in a random manner, then their vector
sum results in a shorter mean vector, denoting a greater
angular deviation from the mean.
The angular deviation around a specific direction can be
calculated as an extension of this formulation by letting adenote the angle of the desired direction with the x-axis. Then
�C0 ¼ �R cosð�x0 � aÞ; �S0 ¼ �R sinð�x0 � aÞ
give the components of the mean vector in the desired
direction, and
S00 ¼ 1� �C0
gives the angular deviation around this direction. In the
accuracy calculations, we utilize this extended formulation
which gives the angular deviation around the desired
direction of the flock.
References
1. Aldana M, Huepe C (2003) Phase transitions in self-driven many-
particle systems and related non-equilibrium models: a network
approach. J Statis Phys 112(1/2):135–153
2. Bonabeau E, Dorigo M, Theraulaz G (ed) (1999) Swarm intelli-
gence from natural to artificial systems, vol 4433. Oxford
University Press, USA
3. Buhl J, Sumpter DJT, Couzin I, Hale J, Despland E, Miller E,
Simpson SJ (2006) From disorder to order in marching locusts.
Science 312(5778):1402–1406
4. Camazine S, Deneubourg J-L, Franks NR, Sneyd J, Theraulaz G,
Bonabeau E (2001) Self-organization in biological systems.
Princeton University Press, New Jersey
5. Celikkanat H, Turgut AE, Sahin E (2008) Guiding a robot flock
via informed robots. In: Asama H, Kurokawa H, Ota J, Sekiyama
K (eds) Proceedings of the 9th international symposium on dis-
tributed autonomous robotic systems (DARS 2008). Springer,
Berlin, pp 215–225
6. Couzin ID, Krause J, Franks NR, Levin SA (2005) Effective
leadership and decision-making in animal groups on the move.
Nature 433:513–516
7. Sahin E, Spears W (eds) (2005) Swarm robotics workshop: state-
of-the-art survey, vol 3342. Springer, Berlin
8. Sahin E, Winfield A (2008) Special issue: swarm robotics.
Swarm Intelligence 2(2–4):69–72
9. Sahin E, Winfield A, Spears W (eds) (2007) Swarm robotics:
second SAB 2006 international workshop, vol 4433. Springer,
Berlin
10. Czirok A, Stanley HE, Vicsek T (1997) Spontaneously ordered
motion of self-propelled particles. J Phys A Math Gen 30:1375–
1385
11. Dorigo M, Sahin E (2004) Special issue: swarm robotics. Auton
Robots 17(2-3):111–113
12. Feldman D (2002) A brief introduction to: information theory,
excess entropy and computational mechanics. Technical report,
Department of Physics, University of California
13. Grassberger P (1988) Finite sample corrections to entropy and
dimension estimates. Phys Lett A 128:369–373
14. Gregoire G, Chate H, Tu Y (2003) Moving and staying together
without a leader. Physica D 181:157–170
15. Halloy J, Sempo G, Caprari G, Rivault C, Asadpour M, Tache F,
Said I, Durier V, Canonge S, Ame JM, Detrain C, Correll N,
Martinoli A, Mondada F, Siegwart R, Deneubourg JL (2007)
Social integration of robots into groups of cockroaches to control
self-organized choices. Science 318:1155–1158
16. Hayes A, Dormiani-Tabatabaei P (2002) Self-organized flocking
with agent failure: off-line optimization and demonstration with
real robots. In: Proceedings of the IEEE international conference
on robotics and automation. pp 3900–3905
Neural Comput & Applic
123
17. Hemelrijk CK, Kunz H (2005) Density distribution and size
sorting in sh schools: an individual-based model. Behav Ecol
16:178–187
18. Huepe C, Aldana M (2008) New tools for characterizing
swarming systems: a comparison of minimal models. Physica A
387:2809–2822
19. Jacob C, von Mammen S (2007) Swarm grammars: growing
dynamic structures in 3d agent spaces. Digit Creativ 18(1):54–64
20. Jadbabaie A, Lin J, Morse A (2003) Coordination of groups of
mobile autonomous agents using nearest neighbor rules. IEEE
Trans Autom Contr 48(6):988–1001
21. Kazadi S, Chang J (2008) Hijacking swarms. In: Proceedings of
the 11th IASTED international conference on intelligent systems
and control. pp 228–234
22. Kelly I, Keating D (1996) Flocking by the fusion of sonar and
active infrared sensors on physical autonomous robots. In: Pro-
ceedings of the 3rd international conference on mechatronics and
machine vision in practice, vol 1. pp 14–17
23. Kwong H, Jacob C (2003) Evolutionary exploration of dynamic
swarm behaviour. In: Proceedings of the congress on evolution-
ary computation. pp 662–669
24. Lien JM, Bayazit OB, Sowell RT, Rodrıguez S, Amato NM
(2004) Shepherding behaviors. In: Proceedings of the IEEE
conference on robotics and automation. pp 4159 – 4164
25. Lien JM, Rodrıguez S, Malric J-P, Amato NM (2005) Shep-
herding behaviors with multiple shepherds. In: Proceedings of the
IEEE conference on robotics and automation. pp 3402–3407
26. Lungarella M, Pegors T, Bulwinkle D, Sporns O (2005) Methods
for quantifying the information structure of sensory and motor
data. Neuroinformatics 3(3):243–262
27. von Mammen S, Jacob C (2008) The spatiality of swarmsquan-
titative analysis of dynamic interaction networks. In: Proceedings
of artificial life. pp 662–669
28. von Mammen S, Jacob C (2009) Swarming for Games: immer-
sion in complex systems. Springer, Berlin, pp 293–302
29. Mardia KV (1972) Statistics of directional data. Academic Press,
London
30. Mataric MJ (1994) Interaction and intelligent behavior. Ph.D.
thesis, MIT
31. Mermin ND, Wagner H (1966) Absence of ferromagnetism
or antiferromagnetism in one- or two-dimensional isotropic
Heisenberg models. Phys Rev Lett 17(22):1133–1136
32. Correll NMS, Rus D (2008) Social control of herd animals by
integration of artificially controlled congeners. In: Proceedings of
the 10th international conference on simulation of adaptive
behavior, LNAI, vol 5040. Springer, pp 437–447
33. Nagry M, Daruka I, Vicsek T (2007) New aspects of the
continuous phase transition in the scalar noise model (snm) of
collective motion. Physica A 373:445–454
34. Nembrini J (2005) Minimalist coherent swarming of wireless
networked autonomous mobile robots. Ph.D. thesis, University of
the West of England
35. Nembrini J, Winfield AFT, Melhuish C (2002) Minimalist
coherent swarming of wireless networked autonomous mobile
robots. In: Proceedings of the 7th international conference on the
simulation of adaptive behavior conference, vol 7. pp 273–382
36. Olfati-Saber R (2006) Flocking for multi-agent dynamic systems:
algorithms and theory. IEEE Trans Autom Contr 51(3):401–420
37. Olfati-Saber R, Murray R (2004) Consensus problems in net-
works of agents with switching topology and time-delays. IEEE
Trans Autom Contr 49(9):1520–1533
38. Parunak HVD, Brueckner S (2001) Entropy and self-organization
in multi-agent systems. In: Proceedings of the 5th international
conference on autonomous agents. pp 124–130
39. Parunak HVD, Brueckner S, Fleischer M, Odell J (2002) Co-x:
defining what agents do together. In: Proceedings of the AAMAS’02,
workshop on teamwork and coalition formation. pp 62–69
40. Reebs SG (2000) Can a minority of informed leaders determine
the foraging movements of a fish shoal? Anim Behav 59:403–409
41. Reynolds C (1987) Flocks, herds and schools: a distributed
behavioral model. In: Proceedings of SIGGRAPH’87. ACM
Press, pp 25–34
42. Romey WL (1996) Individual differences make a difference in
the trajectories of simulated schools of fish. Ecol Model 92:65–77
43. Shi H, Wang L, Chu T (2006) Virtual leader approach to coor-
dinated control of multiple mobile agents with asymmetric
interactions. Physica D 213:51–65
44. Sperati V, Trianni V, Nolfi S (2008) Evolving coordinated group
behaviours through maximization of mean mutual information.
Swarm Intell 2(2–4):73–95
45. Sporns O, Lungarella M (2006) Evolving coordinated behavior
by maximizing information structure. In: Rocha L et al (eds)
Artificial life X. MIT Press, Cambridge
46. Steuer RE, Kurths J, Daub CO, Weise J, Selbig J (2002) The
mutual information: detecting and evaluating dependencies
between variables. In: Proceedings of the European conference
on computational biology. pp 231–240
47. Seeley TDRA, Morse PKV (1979) The natural history of the
flight of honey bee swarms. Psyche 86(2–3):103–113
48. Tanner HG, Jadbabaie A, Pappas GJ (2003) Stable flocking of
mobile agents part i: fixed topology. In: Proceedings of the 42nd
IEEE conference on decision and control, vol 2. IEEE Press,
New Jersey, pp 2010–2015
49. Tanner HG, Jadbabaie A, Pappas GJ (2003) Stable flocking of
mobile agents part ii: dynamic topology. In: Proceedings of 42nd
IEEE conference on decision and control, vol 2. IEEE Press, New
Jersey, pp 2016–2021
50. Toner J, Tu Y (1998) Flocks, herds, and schools: a quantitative
theory of flocking. Phys Rev E 58(4):4828–4858
51. Tononi G, Sporns O, Edelman GM (1994) A measure for brain
complexity: relating functional segregation and integration in the
nervous system. Proc Nat Acad Sci 91:5033–5037
52. Turgut AE, Celikkanat H, Gokce F, Sahin E (2008) Self-organizedflocking in mobile robot swarms. Swarm Intell 2(2–4):97–120
53. Turgut AE, Celikkanat H, Gokce F, Sahin, E (2008) Self-orga-
nized flocking with a mobile robot swarm. In: Proceedings of the
7th international conference on autonomous agents and multi-
agent systems. pp 39–46
54. Turgut AE, Huepe C, Celikkanat H, Gokce F, Sahin E (2008)
Modeling phase transition in self-organized mobile robot flocks.
In: Proceedings of the sixth international conference on ant
colony optimization and swarm intelligence, LNCS, vol 5217.
Springer, London, pp 108–119
55. Vaughan R, Sumpter N, Henderson J, Frost A, Cameraon S
(2000) Experiments in automatic flock control. Rob Auton Syst
31:109–117
56. Vicsek T, Czirok A, Ben-Jacob E, Cohen I, Shochet O (1995)
Novel type of phase transition in a system of self-driven particles.
Phys Rev Lett 75(6):1226–1229
57. Ward AJW, Sumpter DJT, Couzin ID, Hart PJB, Krause J (2008)
Quorum decision-making facilitates information transfer in fish
schools. Proc Nat Acad Sci 105(19):6948–6953
Neural Comput & Applic
123




























