-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
1/13
E L S E V I E R Fuzzy Sets and Systems 69 (1995) 15 27U Z Z Ys e
ts n d s y s t e m s
F u z z y l o g i c a n d a u t o n o m o u s v e h i c l e sE x
p e r i m e n t s i n u l t r a s o n i c v i s i o n
M . P o l o n i , G . U l i v i , M . endittelliDipartimento di
ln/ormatica e Sistemistica. Uniuersitlt degli Studi di Roma 'La
Sapienza , Italy
Received September 1993: revised March 1994
A b s t r a c t
The opportunities offered by fuzzy logic to build maps for robot
navigation are investigated. Characteristics of pointsof the space
(occupied, free, uncertain, etc.) are easily expressed through set
theoretical operations. Real-world experi-ments validate the
approach. The experimental set-up is based on modified Polaroid
ultrasonic sensors; however, theapproach can be easily extended to
incorporate other kinds of sensors.Keywords. Data analysis methods;
Linguistic modeling; Robotics
1 I n t r o d u c t i o n
Use of mobile r obots is spreading in many fields of
application. Typical examples are submarine andspatial exp loratio
n [21, 11, 9], surveillance of industri al installations, rescue
missions in dange rous environ-ments (radiations, chemical
contamination). More common applications are, for example, internal
maildelivery, partially autonomous wheel-chairs for disabled [-20],
intelligent Automatic Guidance Vehicles(AGVs) for floor-shops
[2].
Despite the differences a mong these applications, an au
tonomous vehicle always needs a navigation system todetermine a
suitable path to its target and a sensory system to acquire
knowledge about the crossed environment.
Cons ide r the simplified functional structure of a naviga tion
system depicted in Fig. 1. At the beginning themap can be totally
or partially unknown. The lowest level is constituted by the
measuring processes thatsupply rough information coming from each
sensor, typically the distance of the nearest obstacle
(Sensors).Inf orma tio n is suitably merged and used to build or
upgrade the map of the traveled environ ment (Mapreconstruction).
The map is used to implement the navigation strategy. It can also
be interpreted by otherlevels of the structure, trying to identify
the shape and possibly the nature of the objects on the scene
(Mapinterpretation) to devise more complex strategies [18]. In this
case the map could contain other details on theenvironment as, for
example, the colors of the obstacles.
* Corresponding author. Correspondence address: ELITE
Foundation, Promenade 9. 52076 Aachen, Germany.0165-0114/95/ 09.50
CO 1995 ElsevierScience B.V. All rights reservedSSDI
0165-0114(94)00237-1
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
2/13
16 M. Poloni et al. / Fuzzy Sets and Syste ms 69 1995) 15 27
Navigat ion S tra teg iesMapnterpretation
Map Reconstruct ionSensors
F i g 1 S t r u c t u r e o f a n a v i g a t i o n s y s t e
m
W h e n f ul l a u t o n o m y i s p u r s u e d i n a h i g hl
y u n s t r u c t u r e d e n v i r o n m e n t , s o p h i s t i c
a te d s e n s o r s a r e ty p i c a ll yu s e d , e .g . v i d e
o c a m e r a s ; h o w e v e r , t h i s s o l u t i o n r e q u i
r e s a n e x p e n s i v e h a r d w a r e a n d a c o m p l e x s
o f t w a r e .
I n s i m p l e r a p p l i c a t i o n s t h e e n v i r o n m
e n t c a n b e a s s u m e d p l a n a r a n d s o m e a p r i o r
i k n o w l e d g e o n t h eo b s t a c l e n a t u r e i s a v a
i l a b l e , ty p i c a l l y t h a t t h e y a r e p r i s m a t
i c . I n t h e s e c a s es , u l t r a s o n i c U S ) s e n s o
r s a r e o f te nu s e d a s t h e y a r e c h e a p , l i g h t a
n d r e l i a b l e .
B e s i d e t h e s e p o s i t i v e c h a r a c t e r is t i c
s , U S s e n s o r s s h o w a l s o t w o m a i n d r a w b a c k
s . F i r s t, t h e w i d e a n g l e o fr a d i a t i o n c a u s
e s l a r g e u n c e r t a i n t i e s o n t h e a n g u l a r l o
c a t i o n o f t h e o b s t a c l e t h a t o r i g i n a t e s t
h e e c h o . S e c o n d ,t h e u l t r a s o n i c b e a m i s e
a s i ly r e fl e c t e d w h e n i t h i t s a s u r f a c e w i
th a l a r g e a n g l e o f i n c id e n c e . A f t e r s o mer e
f le c t i o n s it c a n f i n d a p a t h t o r e t u r n b a c k
t o t h e s e n s o r o r i t c a n g o l o s t. T h e r e f o r e
, t h e m e a s u r e d d i s t a n c ec a n b e q u i t e l o n g
e r t h a n t h e o n e o f th e n e a r e s t o b j e c t .
A w e l l - k n o w n a p p l i c a t i o n o f u l t r a s o n
i c s e n s o r s i n t h i s a r e a is d e s c r i b e d i n [ 5
] w h e r e t h e u n c e r t a i n t i e s h a v eb e e n m a n a
g e d i n a s t o c h a s t i c s e t t i n g .
S t o c h a s t i c m e t h o d o l o g i e s [ 6, 4 ] c a n p r
o d u c e r e l i ab l e r es u l ts f r o m u n c e r t a i n r e
a d i n g s w h e n a h i g h n u m b e ro f d a t a i s a v a i l
a b l e a n d t h e y a r e w e l l d i s t r i b u t e d i n t h e
e x p l o r e d a r e a . I n t h i s c a s e a v e r a g i n g c a
n r e d u c e t h eo v e r a l l u n c e r t a i n t y s h o w n b
y t h e f i n a l m a p . C l e a r l y , w i t h a l i m i t e d n
u m b e r o f m e a s u r e s t h e r e s u l t s a r e n o t s og
o o d ; i n d e e d , f u r t h e r s t u d i e s h a v e b e e n c
a r r i e d o u t t o i m p r o v e t h e e f fi c ie n c y o f m a
p b u i l d i n g . I n [ 7 ] t h e a n g l eo f i n c i d e n c e
i s e s t i m a t e d t o d e r i v e t h e p r o b a b i l i t y o
f a m u l t i p l e r e f le c t io n , in [ 1 2 ] t y p i c a l e
n v i r o n m e n tc o n f i g u r a t i o n s e .g . c o r n e r s
) a r e c l as s i fi e d a n d u s e d t o i m p r o v e th e m a
p a c c u r a c y .
A d i f fe r e n t a p p r o a c h t o u n c e r t a in ty h a n
d l i n g i s p r o v id e d b y t h e t h e o r y o f f u z z y s
e ts , w h ic h a l l o w s a g r e a tf lex ib i li ty in the t r
ea tm en t of in fo rm a t io n see e.g. [10 , 23 , 1 ]) . Th is
theo ry has a l r e ady be en used in the f ie ld ofn a v ig a t i
o n o f mo b i l e r o b o t s [ 1 3, 1 8 ], e s p e c ia l l y i n
t h e h ig h e s t l a y e r s o f t h e n a v ig a t i o n s t r u
c tu r e s c e n e i n t e r p r e t a -t i o n p a r t i c u l a r
l y fo r s ce n e s d e r i v e d b y c a m e r a s ) a n d p a th
p l a n n in g h a v e b e e n e x t en s iv e ly s t u d i e d s
ee [ 14 , 1 5 , 8 ] ).
T h i s p a p e r i s a n e x p l o r a t i o n o f t h e p o s
s ib i li t ie s o f fe r ed b y t h i s t h e o r y f o r m a p r
e c o n s t r u c t i o n f r o m s o n a rd a t a b u t o t h e r
k i n d s o f r a n g e f i n d e r s c a n b e c o n s i d e r e d
s i m p l y m o d i f y i n g t h e d e s c r i p t i o n o f t h e
u n c e r t a i n t i e st h e y i n t r o d u c e , n a m e l y t
h e s e n s o r u n c e r t a i n t y m o d e l .
A f t e r a b r i e f i n t r o d u c t i o n o f t h e u s e d
n o t a t i o n s a n d o p e r a t o r s , t h e s e n s o r c h a
r a c te r i s ti c s a r e o u t l i n e d a n d a nu n c e r t a
in ty m o d e l d e r i v e d . A s in [ 5 ] , me a s u r e s a r e
u s e d t o b u i l d tw o ma p s . T h e f i r s t c o n c e r n s
t h e f r e e a r e a s , t h eo t h e r t h e o c c u p i e d o n
e s . B o t h m a p s s p e ci f y o u r d e g r e e o f b e l ie f
a b o u t t h e s t a t u s o f e a c h p o i n t o f t h e s p a
ce .F u z z y l o g ic is u s e d t o g i v e a f o r m a l d e s c
r i p t i o n o f t h e m a n i p u l a t i o n s o f t h e m a p s
; t h is a l l o w s t o c a r r y o u t s e v e ra lc h a r a c t
e ri s t i c s o f t h e e n v i r o n m e n t . T h e o p e r a t
i o n s a r e d e s c r i b e d i n n a t u r a l l a n g u a g e a
n d e a s il y f o r m u l a t e du s in g f u z z y s e t o p e r
a to r s . A d e s c r i p t i o n o f t h e e x p e r im e n ta l
s e t - u p a n d o f t h e o b t a in e d r e s u l ts c o n c lu
d e t h e p a p e r .
2 N o t a t i o n s a n d o p e r a t or sG i v e n a c r i s p
u n iv e r s a l s e t U a n d d e n o t i n g b y u i t s g e n e
r i c e l e me n t , a f u z z y s e t A _ ~ U w i l l b e i d e n
t i f ie d b y
i t s m e m b e r s h i p f u n c t i o n :A u ) : u ~ [ 0 , 1 ]
.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
3/13
M . P o l o n i e t a l. / F u z z ) , S e t s a n d S y s t e m
s 6 9 1 9 9 5 ) 1 5 - 2 7 7
I n t h e p a p e r , r e c t a n g u l a r b i d i m e n s i o
n a l m a p s a r e c o n s i d e r e d . T h e r e f o r e , t h e
u n i v e r s a l se t a n d i ts e le m e n t sa r e , r e s p e c
t i v e l y , s p e c i f i e d a s U = X x Y a n d u = ( x , y ) ,
b e i n g x a n d y t h e Ca r t e s i a n c o o r d i n a t e s o
f a p o i n t i nt h e m a p a n d X a n d Y t h e i r r a n g e s
.
E a c h p o i n t c a n b e e i th e r e m p t y o r o c c u p i
ed , ' a c ri s p p r o p e r t y . H o w e v e r , b e c a u s e o
f t h e m e a s u r i n gu n c e r t a i n t i e s , w e c a n e x
p r e s s o n l y a d e g r e e o f b e l i e f a b o u t t h e s e
p r o p e r t i e s . A s e x p l a i n e d l a t er , t w o f u z
z y s e tsa r e u s e d t o e x p r e s s e m p t i n e s s a n d f
u ll n e ss :
E x , y ) : X Y ~ [ 0 , 1 ] , O x , y ) : X x Y - - , [ 0 , 1 ]
.S e v e r a l l o g ic a l o p e r a t i o n s a r e d e f i n e d
f o r t h e s e f u z z y s e ts b y t r i v i a l e x t e n s i o
n o f t h e u n i d i m e n s i o n a l o n e s .
T h e s e t c o m p l e m e n t a t i o n i s i m p l e m e n t
e d , a s u s u a l , b yc A u ) ) = 1 - A u ) . 1 )
A s f o r t h e i n t e r s e c t i o n , b o t h t h e a l g e
b r a i c p r o d u c ti A u ) , B u ) ) = A u ) n B u ) = A u ) *
B u ) (2)
a n d t h e b o u n d e d p r o d u c ti A u ) , B u ) ) = A u )
c~ B u ) = m a x ( 0 , A u ) + B u ) - 1) (3)
a r e u s e d .B y D e M o r g a n l a w , se t u n i o n i s d
e f i n e d , r e s p e c t iv e l y , a s t h e a l g e b r a i c
s u m :
u A u ), B u ) ) = A u ) w B u ) = A u ) + B u ) - A u ) * B u )
(4)a n d t h e b o u n d e d s u m
u A u ) , S u ) ) = A u ) w S u ) = mi n ( 1 , A u ) + B u ) ) .
(5)I n t h e f o l l o w i n g , w e s h a l l r e f e r t o t h e
c o u p l e s ( 2 , 4 ) a n d ( 3 , 5 ) , r e s p e c t i v e l y ,
a s A P a n d BS c o u p l e s .I n th i s p a p e r a l s o p a r
a m e t e r i z e d u n i o n o p e r a t o r s h a s b e e n c o n
s i d e r e d , d u e , r e s p e c ti v e l y , t o D o m b i a n
d
Ya ger [3 , 10, 22] :1E 1+ A ~ - I -t- B ~ - - I
fo r 2 E (0 , ~ ) an dm i n [ 1, ~ /A ( u ) p + B u ) P 1
wi th p > 0 .
(6)
(7)
3 S e n s o r m o d e l i n g an d m a p b u i l d in gG e n e r
a l l y a n u l t r a s o n i c s e n s o r i s c o m p o s e d b y
t w o f u n d a m e n t a l e l e m e n t s : t h e a c o u s t i c
t r a n s d u c e r a n d
a r a n g i n g c i r c u i t b o a r d . I t w o r k s i n a s
i m p l e w a y : a p a c k e t o f u l t r a s o n i c w a v e s i
s g e n e r a t e d a n d t h e r e s u l ti n ge c h o i s d e t e
c t e d . T h e t i m e b e t w e e n t h e t r a n s m i s s i o n
a n d t h e r e c e p t i o n o f t h e p a c k e t is p r o p o r
t i o n a l t o t h ed i s t a n c e o f th e o b s t a c l e . M o
r e s o p h i s t i c a t e d t e c h n i q u e s c o u l d b e u s
e d , i n c l u d i n g r e a l - t im e s i gn a l p r o c e s s
in g ;h o w e v e r , t h i s w o u l d r e q u i r e e x p e n s i
v e c o m p u t a t i o n d e v i c e s .
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
4/13
18 M . P o l o n i e t a l. / F u z z y S e t s a t t d S y s t
e m s 6 9 1 9 9 5 ) 1 5 2 7We assume a typical office-like
environment, occupied by prismatic obstacles extending indefinitely
in the
vertical direction. Therefore, the poin ts of an ideal map are
either empty or occupied .The measur ing process, however,
introduces several kinds of uncertainties, mainly related to the
character-
istics of the used sensor. One source of uncertainty is given by
the non-zer o width of the r adiation cone (about30 for the used
ones), making it impossible to know exactly the angular position of
the object whichoriginated the echo; for example the first three
cases in Fig. 2 all give the same result. Moreover, the beammay go
easily lost or it may be reflected more than once before coming
back to the sensor as shown by thelast case in the same figure. As
a consequence, each point of the real map can be assumed empty or
occupiedwith a certain degree of belief and the two conditions are
not mutually exclusive. Very low degrees of belieffor both att
ributes in a point denote a lacking of information, while two very
high values imply a contradic -tion due, e.g. to a poor accuracy of
the measures.
In the process of map building several bidimensional fuzzy sets
are determined by iteratively mappi ng thesensor model on the grid.
Indeed, the final map itself results to be a fuzzy set. All these
are defined overa bidimensional universal set corresponding, in our
experiments, to a square with 10 m sides. F or c ompu ta-tional
reasons, the square is subdivided in 100 x 100 square cells. This
approach is well suited to describe bysimple linguistic statements
the ope rations necessary to derive a navigatio n map and m oreov
er its grid-basednature complies with the implementation of path
planning algorithms.
The choice of a suitable sensor model (more exactly: of the
whole sensor-environment interaction) is ofparamount importance for
the overall performance. It should describe all the phenomena
involved in themeasuring process. In the authors ' opinion, a
precise numeric appro ach e.g. based on an accurate analysisof the
shape of the radiation lobe - is useless because of the level of
the overall uncertainty. Here onlyqualitative (linguistic)
descriptions of the different phenomena are used and expressed in
terms of simplefunctions.a. Neglecting beam reflections, a single
measure provides the inf ormation that one or more obstacles
are
located somewhere on the 30 arc of circumfe rence of radius r
(the measur ed distance). Hence, there isa possibility for each of
the cells near the arc to belong to the set (o of the occup ied
ones. A simpleparabola models this phenomenon:
I / 'qo p) =< \ ~p I J Vp: ]p -r I< A p ,otherwise, 8
)where r is the distance meas ured by the US sensor, with a range
between 0.3 and 8 m, p is the radialdistance of the cell from the
sensor, and A p is an estimate of the overall accuracy. Among the
factorscontri butin g to the fuzziness of the concept of near are
the errors affecting the measures and the mapdiscretiz ation, i.e.
the sensor and the obstacle(s) are generally loca ted off the cell
centers.
V V i/4 : /a ) b ) c ) d )
Fig. 2. Typical uncertainties with ultrasonic sensors.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
5/13
M. Pohm i e t a l . / Fuzz ) , S e t s and Sys tems 69 (199 5)
15 27 19T w o r e m a r k s a r e i n o r d e r : ( a) t h e s u m
o f t h e o c c u p a t i o n p o s s i b i l it i e s o f t h e c
el ls n e a r t h e a r c is n o t e q u a l t oo n e b e c a u s e
o n e o r m o r e c el ls m a y b e o c c u p i e d ; (b ) t h e r
e p e t i ti o n o f t h e s a m e m e a s u r e c a n r e d u c e
o n l ya l i t t l e t h e o v e r a l l u n c e r t a i n t y w h
i c h m a i n l y d e p e n d s o n n o n - s t o c h a s t i c f a
c t o r s .
b . C e l l s i n s i d e t h e c i r c u l a r s e c t o r o f
r a d i u s r s h o w a n e v i d e n c e t o b e f re e f r o m o
b s t a c l e s , s o th e y b e l o n g t o t h es e t ~ o f th e
e m p t y c e ll s. T h i s is s i m p l y e x p r e s s e d b
y
10 V p < r - - A pg b ( P ) = o t h e r w i s e . ( 9)c . R e
f l e c t i o n s m o d i f y o u r b e l i e f a b o u t t h e s t
a t u s o f t h e e x p l o r e d c e l ls . A s re f l e c te d b
e a m s m a k e a l o n g e r f ly
t h a n d i r e ct o n e s , th e s i m p l es t w a y t o t a c
k l e w i th t h i s p h e n o m e n o n is t o g r a d u a l l y r
e d u c e o u r b e l ie f f r o ma m a x i m u m t o a m i n i m u
m a c c o r d i n g t o th e d is t an c e p :
g c ( p ) = r a i n ( l , h x e -h 2 p + h3) . ( 10)P a r a m e
t e r h 3 r e p r e s e n t s t h e m i n i m u m d e g r e e o f b
e li ef , h i , h 2 a r e u s e d t o i n t e r p o l a t e b e t w
e e n t h e t w ov a l u e s a n d t a k e i n t o a c c o u n t a
v e r a g e d i s t an c e s i n t h e e n v i r o n m e n t .
d . T h e w a v e i n t e n s i t y d e c r e a s e s f a r f r
o m t h e b e a m a x i s a n d r e a c h e s z e r o a t t h e b o
r d e r s o f t h e lo b e . T h e r e f o r e ,t h e b e l i e f o
f e a c h a s s e r t i o n is h i g h e r f o r th e c e ll s n e
a r e r t o t h e b e a m a x is . T h e c e l ls o u t s i d e t h
e l o b e d o n o tc h a n g e t h e i r a t t r i b u t e s .
g a(~ 9 ) = ~ 1 - - ( 1 2 , 9 ) 2 V ~ 9 : ~ l < ~ / 1 2 , (
11)~ o t h e r w i s e .e . E v e n i n i d ea l s i t u a t i o n
a s in g l e m e a s u r e i s n o t s u f fi c ie n t t o g a i n
c e r t a i n t y o n t h e s t a t u s o f a c el l. I n d e e d e
a c h
c el l is t o b e v i e w e d s e v e ra l t i m e s a n d i ts
o c c u p a n c y a n d e m p t i n e s s r e s u lt f r o m t h e
u n i o n o f m a n ym e a s u r e s . T h e w e i g h t o f t h e
e l e m e n t a r y a c q u i s i t i o n i s g i v e n b y t w o c
o e f fi c ie n t s : k s a n d k ~ ,, r e s p e c ti v e l y , f o
re m p t i n e s s a n d o c c u p a n c y .W i t h t h e u s e d s
e n s o r s , t h e v a l u e s o f t h e p a r a m e t e r s a r e
, r e s p e c ti v e l y : A p = 0 .15, k,o = 0 .5, ks = 0 .1,
hi = 1.2, h = 1, h 3 = 0.1 .G i v e n a c el l l o c a t e d a t
a d i s t a n c e p f r o m t h e r a n g e f i n d e r a n d a n a
n g l e 0 f r o m i t s a x is , it s p o ss i b i li t ie s t o b
e
e m p t y o r o c c u p i e d a r e o b t a i n e d b y a d d i
n g t h e p r e v i o u s v a lu e s . 1 F o r c o m p u t a t i o
n a l r e a s o n s, t h e a lg e b r a i cp r o d u c t is us e d
, h o w e v e r , i t c o u l d b e s u b s t it u t e d b y o t h
e r o p e r a t o r s :
~ ' ( 0 , p ) = k E g b g c g , t , ( 12)o'(0, p) = k o , g . g
c g d . ( 13)
T h e p r i m e d e n o t e s t h a t t h e se m e m b e r s h i
p f u n c t i o n s a re r e fe r re d t o p o l a r c o o r d i n
a t e s , t h e s a m e w a y t h e ya r e r e p r e s e n t e d (
n o r m a l i z e d ) i n F i g . 3 i n th e s a m p l e c a s e o
f a m e a s u r e d d i s t a n c e e q u a l t o 2 .9 m .
T o b u i l d t h e m a p s e v er a l m e a s u r e s a r e t a
k e n f r o m k n o w n p o i n t s in th e c o n s i d e r e d e n
v i r o n m e n t . H e r e w ew i ll n e g l e c t t h e w a y t h
e r o b o t r e a c h e s t h e s e p o i n t s . H o w e v e r , a
s it w il l b e c o m e c l e a r i n t h e s e q u e l, t h e m a
pc a n b e r e c o n s t r u c t e d s t e p b y s te p , a s th e
r o b o t m o v e s a m o n g t h e f re e c el ls .F o r e a c h r
e a d i n g k t h e t w o s u r f a c e s e ' ( O , p ) a n d o 9 '
( O , p ) a r e p r o j e c t e d o n t h e c e ll s o f t h e C a
r t e s i a n m a pu s i n g a r e c u r s i v e a l g o r i t h m
w h o s e c o m p l e x i t y i s l i n e a r in t h e n u m b e r
o f i n t e r e s t e d c e ll s. T h e o u t p u t s o f t h ep r
o j e c t i o n s a r e t w o f u z z y s e ts e k ( i , j ) a n d
o ( i , j ) , b e i n g i, j t h e i n d i c e s o f t h e c e l l
m a t r i x .
1These functions are used to generate a fuzzy set from a
measure. This fuzzification stage is quite different from that
generally used infuzzy co ntrol.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
6/13
2 0 M . P o l o n i e t a l . / F u z z y S e t s a n d , ~ v s
t em s 6 9 1 9 9 5 ) 1 5 2 7
1' 1
2 I
2 1
F i g . 3. S e n s o r c e r t a i n t i e s f o r e m p t y l
ef t) a n d o c c u p i e d c e l l s r i g h t) in a t y p i c a l
c a s e .
T h e p i e c e s o f i n f o r m a t i o n c o n c e r n i n g
t h e e m p t y a n d t h e o c c u p i e d c e l ls a r e s e p a
r a t e l y c o l le c t e d d u r i n g t h em e a s u r i n g p r
o c e s s u s i n g a u n i o n o p e r a t o r . T h e a s s o c i
a t i v e p r o p e r t y o f th e s e o p e r a t o r s a l lo w s
u s i n g t w o f u z z yse ts E i , j ) a n d O i , j ) a s a c c
u m u l a t o r s . A s a c o n s e q u e n c e t h e p r o c e d u
r e c a n b e u s e d a l s o w h i l e t h e r o b o t i sm o v i
n g . A t t h e e n d o f t h e p r o c e s s t h e t w o s e t s a
s s u m e t h e v a l u e s :
E i , j ) = ~ ) e k i , j) , (14)O i , j ) = ~ J ~ O k i ,j ),
(15)
b e i n g th e u n i o n p e r f o r m e d o v e r a ll th e a v
a i l a b l e m e a s u r e s . F o r t h is o p e r a t i o n D o
m b i ' s u n i o n (6 ) h a s b e e nu s e d . I n f a c t t h e m
a x o p e r a t o r i s n o t s u i t a b l e i n t h i s c o n t e
x t a s it d o e s n o t a l l o w t o t h e f i n al b e l ie f t
o s u m u pa l l t h e a v a i l a b l e i n f o r m a t i o n . O
t h e r o p e r a t o r s ( e.g . Y a g e r o n e s ( 7) ) s a t u
r a t e , i.e . t h e y g i v e f o r m a l c e r t a i n t ya f te
r a c e r t a in n u m b e r o f c o n c o r d a n t m e a s u r e
s . T h e c h o s e n u n i o n f a m i ly o n l y a s y m p t o t
i c a l l y r ea c h e sc e r t a i n t y ; in t h i s s en s e it
i s m o r e a p p r o p r i a t e f o r o u r p u r p o s e s . F i
g s . 4 a n d 5 r e f er a s i m p l e c o m p a r i s o n : t h e
ys h o w h o w t h e d e g r e e o f b e l i e f i n c r e a s e s
f o r a g i v e n c el l i n t h e c a s e t h a t t h e m e a s u
r e s c o n t i n u o u s l y g i v ea c e r t a i n t y e q u a l
t o 0 . 1. W i t h t h e c h o s e n v a l u e s f o r p a r a m e
t e r s p a n d 2 t h e t w o f a m i l i es o f c u r v e s s h o
w s i m i l a rv a l u es f o r a s m a l l n u m b e r o f m e a s
u r e s .
I n t e r e s t in g c o m p a r i s o n s a m o n g t h e s e a
n d o t h e r p a r a m e t r i c u n i o n o p e r a t o r s c a n
b e f o u n d i n [1 9 , 2 2 ].T h e t w o o b t a i n e d s e ts (
m a p s ) o f t h e e m p t y c e l l s a n d o f t h e o c c u p i
e d o n e s c a n b e c o m b i n e d i n s e v er a l w a y s
( f r o m n o w o n , t h e l in g u i s t ic a t t r i b u t e
s w h i c h a s s u m e a f o r m a l m e a n i n g w i ll b e sl a
n te d ) . T h e i r i n t e r s e c t i o n , f o re x a m p l e ,
r e p r e s e n t s t h e s e t o f c e ll s f o r w h i c h t h e
m e a s u r e s a r e a m b i g u o u s , w i t h t h e m e m b e r
s h i p v a l u e s g i v in ga d e g r e e o f c o n t r a d i c t
i o n :
C i ,j ) = E i , j ) ~ O i, j ) . (16)T h e s e t o f t h e u n
e x p l o r e d c e l l s c a n b e o b t a i n e d a s
Q i , j ) = f f , i , j) r n O i , j ) , (17)w h e r e t h e o v
e r b a r i n d i c a t e s s e t c o m p l e m e n t a t i o n
.
T h e k i n d o f e l a b o r a t i o n d e p e n d s o n t h e
a p p l i c a t io n . I f t h e m a i n t a s k o f t h e r o b o
t is to b u i l d a n a c c u r a t em a p , t h e n t h e c o n t
r a d i c t o r y c e l l s s h o u l d b e e x p l o r e d f i r s
t . F o r n a v i g a t i o n p u r p o s e s , w h a t i s n e e d
e d i sa c o n s e r v a t iv e m a p o f t h e f r e e cells M i ,
j ) . A c c o r d i n g l y , t h is m a p c a n b e b u i lt b y s
u b t r a c t i n g t h e a m b i g u o u sc e l l s f r o m th e e
m p t y o n e s :
M i , j ) = E i , j ) ca C i ,j ) , (18)
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
7/13
M . P o l o n i e t a l. / F u z z y S e t s a n d S y s t e m s
6 9 1 9 9 5 ) 1 5 - 2 7 2 1
0 9
0 8
0 7
0 6
0 5
0 4
0 3
0 2
0 1
01i : i i i i " "
2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 0 l l 0 2 0 0
o . . . . . . . . . . . i . . . . . . . . . . . . ~ . . . . . .
. . . . . .. : . . . . . . . . . . . ~ . . . . .. . . . .. . . .. ~
. . . . . . . . . . . . . . . . . . . . . . . . i . . . . . . . . .
. . . . i . . . . .
o . . . . . . . i i i i i
o , . . . . ~ . . . . . . i i . . .. . . . . . . . . . . . . .
i0 . 6 . . . . . . . . . i . . . . . . . . .. . . . . . i . . . . .
. . . . . . . . . . . . . . . . . . . . i . . . . . . . .. . . . .
. . i . . . . . . . . .. . . . . . ~ . . . . . . . . .. . . . . . .
. . . . . . . .. . . . . . i . . . . . . . .. . . . . . . . i . . .
. . . . . . . . . . .
0 . 5 . . . . . . . . . . . . . . . . . . . . . . f . . . . . .
. . . . . . . . : . . . . . . . . . . . . t . . . . . . . . . . . .
. ~ . . . . . . . . . . . . ~ . . . ~
0 . 3 . . . . . . . . . i . . . .. . . .. . .. . . . i . . . ..
. . .. . .. . . ~ . . . . . . . . . . . ~ . . . . . . . . . . . - .
. . . . . . . . . ~ . . . . . . . . . . . . . . . . . . . . . . . .
. . . i . . . . . . . . . . . . . . i . . . . . . . . . . . .
..
0 . 2 . . . . . i . . . . . . . . . i . . . . . . . . . . . i .
. . . . . . . . i . . . .. . . .. . . .. i . . . . . . . . . i . .
. . . . . . i . . . . . . . i . . . . . . . . . . i ............o.~
.............. .............. ................... .... .... ...
..~- ........~............
............................................
Fig. 4. Certain ty accumulation according to D om bi
union(certainty vs. iterations). Fig. 5. Certain ty accumulation
according to Y ager union(certainty vs. iterations).
A m o r e c o n s e r v a t i v e m a p c a n b e o b t a i n e
d g e t t i n g r i d a l s o o f t h e o c c u p i e d c e ll s .
F o r m a l l y , th i s c a n b ee x p r e s s e d a s
M i , j ) = E i , j ) ~ O i , j ) c~ C i ,j ) . (19 )T h e r e s
u l ts o b t a i n e d w i t h t h e s e t w o f o r m u l a t i o
n s h a v e b e e n c o m p a r e d i n t h e n e x t se c t io n .
A s f o r t h e s ett h e o r e t i c a l o p e r a t i o n s , b o
t h t h e c o u p l e o f e q u a t i o n s ( 2 ), ( 4) a n d ( 3)
, ( 5) h a v e b e e n u s e d .
4 . E x p e r i m e n t a l s e t - u p
T h e u s e d u l t r a s o n i c s e n s o r is a c o m m e r c
i a l d e v i c e f r o m P o l a r o i d C o r p o r a t i o n [ 1
6, 1 7 ]. It i s c o m p o s e d o ft w o f u n d a m e n t a l e l
e m e n t s : t h e a c o u s t i c t r a n s d u c e r w i t h t h
e a s s o c i a t e d a n a l o g e l e c t ro n i c s a n d a r a
n g i n gc i r c u i t b o a r d .
T h e d e v i c e e m i t s a c h i r p s i g n a l o f 1 m s d
u r a t i o n , m a d e o f 56 p u l s es a t a f r e q u e n c y o
f 49 .4 1 k H z . T h e m a i nr e d i a t i o n l o b e c o v e r
s a s o l i d a n g l e o f a b o u t 3 0 a t - 3 8 d B .
T h e s t a n d a r d P o l a r o i d ' s r a n g i n g s y s t
e m i s a b l e t o d e t e c t th e p r e s e n c e o f o b j e c
t s i n a r a n g e f r o m 3 0 c m t o1 0 m .
T o o b t a i n b e t t e r p e r f o r m a n c e s a n e w r a
n g i n g c i r c u i t h a s b e e n d e s i g n e d , w h i c h i
s a b l e t o d r i v e e i g h t se n s o r s.N o t e , h o w e v
e r , t h a t o n l y o n e s e n s o r a t a t i m e c a n b e f
ir e d t o a v o i d c r o s s - i n t e r f e r e n c e p r o b l
e m s .
U s i n g t h e s u g g e s t i o n s g i v e n i n [ 1 6 ], t h
e m i n i m u m r a n g e h a s b e e n l o w e r e d t o 1 0 c m a
n d i t i s p o s s i b l e n o wt o s e l ec t t w o d i f f er e
n t t y p e s o f r es o l u t i o n : h i g h ( ~ 1 c m ) a n d l
o w ( 4 .5 c m ). A t h i g h r e s o l u t i o n , t h e m a x i m
u md i s t a n c e t h a t c a n b e m e a s u r e d i s a b o u t
6 0 c m .
T h e b o a r d h a s b e en i n te r f ac e d t o a H e w l e t
t P a c k a r d 1 6 M H z V E C T R A 3 8 6S X c o m p u t e r b y
m e a n s o fa B u r r - B r o w n 3 2 b i t p a r a l l e l c o m
m u n i c a t i o n c a r d . D a t a e x c h a n g e i s b a s e d
o n a 1 6 b i t b u s : o n e b y t e is f o rb o a r d c o n t r o
l , w h i l e t h e o t h e r c o n t a i n s t h e n u m e r i c a
l d a t a p r o p o r t i o n a l t o t h e d i s t a n c e c o v e
r e d b y th ea c o u s t i c w a v e . T h e e i g h t b i t s o f
c o n t r o l a r e c o n f i g u r e d a s f o ll o w s : t h r e
e a r e f o r t h e a d d r e s s e s o f th e u l t r a s o n i cs
e n s o r s, t h r e e a r e f o r c o o r d i n a t i o n w i t h
o t h e r s e n s o r y s y s t e m s o r f o r fu t u r e b o a r
d c a p a b i l i t ie s , t w o g i ve s ,r e s p e c t i v e l y
, t h e s t a r t s i g n a l f o r th e U S p u l s e a n d t h e
d e s i r e d r e s o l u t i o n ( h i g h / l o w ) .
T h e P C s e le c ts a n d f ir e s t h e s e n s o r s , c o l
l ec t s t h e r e s u l ts a n d e l a b o r a t e s t h e m a p s
b y m e a n s o f t h ea l g o r i t h m s d e f i n e d i n t h e
f o l l o w i n g . A s k e t c h o f t h e e x p e r i m e n t a l
s e t - u p i s g i v e n i n F i g . 6.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
8/13
2 2 M. Poloni et al. / Fuzzy Sets and Syste ms 69 1995) 15
27
9O
O
Dig i t a l 6 0ln te f f a c e Ca r d 5 0C m m a n d s ( 8 b i
t) J 1 D a t a (8 b i t ) 4 0
[ Cus tomlnterface oard I 3 0
. . . 1 0U l t r a s o n i c S e n s o r s r r a y
0 1 0 1 i
2 0
).1
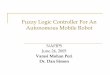
4 0 6 0 8 0 1 0 0F i g . 6 . E x p e r i m e n t a l e t- u p .
F i g . 7 . M a p o f th e o c c u p i e d ce l ls .
In the presented experiment s only one sensor is used, which is
rotat ed 9 at each measure until a 360 scanis performed. Larger
steps have been tried, but they gave worse results. The sensor is
mounted on a trolley at1.3 m above the floor. Each measure takes
about 0.25 s. Several independent readings from the same
positionare averaged to reduce the effects of the tr ansduce r
sensitivity fluctuations.
All the software is implemented in C language. The main
functions include the low-level sensor interfaces,the pro jection
of ~ (0, p) and d( 0, p) on the Cartesian frame, the accumul ation
accordi ng to (14), (15), andfinally the ma p building. The
execution of the whole pr ogr am for eight measuring points last a
bout 1.25 s onthe aforesaid machine.
5 E x p e r i m e n t a l r e s u l tsThe described map building
system has been tested in a corrido r of our departm ent. This is
rather long and
narrow, with several book cabinets located by the walls, so that
beams are easily reflected. Halfway thecorridor there is a widening
where a slim irregular obstacle has been added. The ultrasonic
sensor has beenmanual ly placed in eight known locations and 40
measures have been taken f rom each of them to cover thewhole
circle. The chosen test-environment is coherent with our research
goal, i.e. a mobile robot capable ofreconstr ucting a nd navigating
in an u nkn own office-like environment. It emphasizes the issues
of reflection,reconstruction of convex and concave corners and of
the resolution of narrow walk-through passages thatcan be hidden
from the ar c-shaped response of the sensor. In the following the
maps are represented bycontour plots; the level lines are generally
drawn at 0.3, 0.5 and 0.7. No scaling or normalization has
beenapplied during data processing.
The overall maps of the o upied and of the empty cells are
given, respectively, in the con tour plots of Figs.7 and 8. Using a
value 0.6 of)+ in the Do mbi s union, the values of the member ship
functions of the two m apsrange, respectively, between 0 and 0.85
and between 0 and 0.88. The actual map of the corridor and of
theobstacle is superimposed to the plots and the locations of the
points of measure are marked with asterisks.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
9/13
M . P o l o n i e t a l . / F u z z y S e t s a n d S y s t e m
s 6 9 1 9 9 5 ) 1 5 2 7 23
90 9080 80
50 t~ P4030 3020 2010 1 0 ~
a20 40 60 80 1O0 20 40 60 80Fig . 8. M ap of the em pty ce l ls
. Fig . 9 . M ap f rom Eq. (19) and BS opera tors .
100
[0
1020 40 60 80 1O0
Fig . 10. M ap f rom Eq. (19) and AP opera tors .
10090807 0 l ~ .605040302010
/9~3
20 40 60 80 100Fig . 11. M ap f rom Eq. (18) and BS opera tors
.
T h e f ir s t o f t h e t w o m a p s i s c l u t t e r e d b y
m a n y b e a m s p u r i o u s r e f l e c ti o n s , re v e a l e
d b y m i s s e d w a l ls e .g .i n 4 5 - 6 5 , 2 0 - 3 0 ) . T h
e e f f ec t o f t h e l o b e w i d t h i s e v i d e n t n e a r
t h e c o r n e r s w h e r e a r c s h a p e d a r t i f a c t s a
p p e a re.g. 5 5 - 8 0 , 4 0 - 5 0 ). T o m a k e t h e se p h e n
o m e n a m o r e e v i d e n t a c o n t o u r l in e a t 0 .1 h a
s b e e n a d d e d . T h e m a p o f
t h e e m p t y c el ls is c o m p a c t a n d s e e m s a g o o
d r e p r e s e n t a t i o n o f t h e c o r ri d o r . H o w e v
e r , n o t e t h a t e v e n t h ec o n t o u r l i n e 0 .7 , w h
i c h e n c l o s e s a n a r e a a l m o s t ) c e r t a i n l y
fr ee , i n 6 5 , 5 0 - 8 0 ) i s b e h i n d t h e a c t u a l w a
l l.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
10/13
24 M . P o l o n i e t a l . / F u z z y S e t s a n d S y s t e
m s 6 9 1 9 9 5 ) 1 5 2 7M o r e o v e r , t h e l a r g e d i s t
a n c e a m o n g t h e c o n t o u r l i n es d e n o t e a la c k
o f r e s o l u t i o n . T h i s i s o n e o f t h e m a i nq u a
l i t y i n d i c e s c o n s i d e r e d i n th e f o ll o w i n g
, t h e o t h e r o n e b e i n g o b v i o u s l y t h e r e li a
b i l it y o f t h e n a v i g a t i o nm a p .
W e t e s t e d t h e fo u r c o m b i n a t i o n s o b t a i n
e d i m p l e m e n t i n g E q s . (1 8) a n d ( 19 ) b y b o t h
A P a n d B S o p e r a t o r s .A l l t h e c o m b i n a t i o n
s g i v e g o o d r e s u l t s e s p e c ia l l y c o n s i d e r
i n g t h e s m a l l n u m b e r o f m e a s u r e s . N o t e t h
a t a l l th em a p s r a n g e b e t w e e n 0 a n d 0 . 8 8 .T h
e b e s t r e s u l t s h a v e b e e n o b t a i n e d u s i n g E
q . (1 9) a n d t h e B S c o u p l e o f o p e r a t o r s . T h e
r e s u l t i n g m a p i sg i v e n i n F ig . 9. I t c a n b e c
o m p a r e d w i t h F i g . 1 0, o b t a i n e d b y t h e s a m
e e q u a t i o n b u t u s i n g t h e A P c o u p l e .N o t e i
n t h e f o r m e r m a p t h e s h a r p n e s s o f t h e d e t e
c t e d w a l l s in p a r t i c u l a r o n t h e r i g h t s i d
e o f t h e c o r r i d o r , a l s ot h e d o o r s b e t w e e n
t h e b o o k c a b i n e t s a r e w e l l d r a w n . T h e c o n
t o u r l i n e a t 0 . 5 i s a l w a y s c o n t a i n e d i n t h
e s a f ez o n e , e x c e p t f o r a sma l l a r e a n e a r t h
e p o in t ( 65 , 5 2 ).
I n t h e l a t t e r m a p t h e l ev e l l i ne s a re g e n e
r a l l y m o r e d i s t a n t a n d t h e o b s t a c l e r e s u
l t s q u i t e l a r g e r t h a n i n t h ep r e v i o u s m a p
a n d i s a l m o s t c o n n e c t e d t o t h e w a l l .
T h e ( s m a l l ) i m p r o v e m e n t s o f t h e B S c o u
p l e o v e r t h e A P o n e , c a n b e a t t r i b u t e d t o t
h e d if f e re n t s t r e n g t h o ft h e t w o i m p l e m e n
t a t i o n s o f t h e i n t e rs e c ti o n :
iBs(a ,b)
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
11/13
M . P o l o n i e t a l . / F u z z y S e t s a n d S y s t e m
s 6 9 1 9 9 5 ) 1 5 - - 2 7 5
2 0
1 5
1 0
2 5 5 7 5 i0 12 5 15 17 5Fig. 13. En larged view from Eq. (19)
and AP operators.
2 0
S i m i l a r c o n c lu s i o n s c a n b e d r a w n b y o b s
e r v i n g t h e t h r e e e n l a r g e d v i e w s o f t h e r e
g io n c o n t a i n i n g t h ec e n t r a l o b s t a c l e , sh
o w n , r e sp e c t i v e ly , i n F ig s . 1 2 1 4 i n t h e s a
me o r d e r a s b e f o r e . I n p a r t i c u l a r , i n t h e
f ir s td e n s i t y p l o t t h e o b s t a c l e a p p e a r s v
e r y w e l l o u t l i n e d a n d s u f f i c i e n t l y s e p a
r a t e d f r o m t h e w a l l .
6 C o n c l u s i o n s
A n ew a p p r o a c h i s p r o p o s e d t o b u i l d m a p s
f o r a u t o n o m o u s m o b i l e ro b o t s . F u z z y s et t
h e o r y h a s b e e ns u c c e s sf u l ly u s e d t o m a n a g
e t h e u n c e r t a i n t i e s r e s u l t i n g f r o m t h e c
h a r a c t e r i s t i c s o f t y p i c a l s e n s o rs . M o r
e o v e r ,i t a l l o w s t o d e s c r i b e , in a v e r y n a t
u r a l w a y , t h e o p e r a t i o n s n e c e s s a r y t o e x
t r a c t s p e c i fi c t y p e s o f i n f o r m a t i o nf r o m
t h e m a p s .
A p r o t o t y p e s y s t e m h a s b e e n r e a l iz e d in
o u r l a b o r a t o r y , u s i n g t h e w e l l - k n o w n P o
l a r o i d u l t r a s o n i c s e ns o r s.I t h a s b e e n s u
c c e s sf u l ly te s t e d a n d h a s s h o w n t h e a d v a n
t a g e s o f t h e d e s c r i b e d a p p r o a c h . T h e q u a
l i t y o f t h eo b t a i n e d m a p s is n o t e w o r t h y , i
n p a r t i c u l a r i f c o m p a r e d w i t h t h a t o f o t h
e r m a p s p r e s e n t ed i n th e l i te r a tu r e .T h e p r
o p o s e d s t r u c t u r e c a n b e a l s o u s e d t o in c l
u d e i n f o r m a t i o n d e r i v i n g f r o m d i f fe r e n
t k i n d s o f d e v i c es . A sa m a t t e r o f f a ct , o n l
y t h e m o d e l i n g o f t h e u n c e r t a i n t i e s t h e y
i n t r o d u c e i s r e q u i r e d . A l s o i n c r e m e n t a
l m a pb u i ld i n g , t y p ic a l o f r o b o t s n a v i g a t
i n g i n a n u n k n o w n e n v i r o n m e n t , c a n b e e as
i ly a ll o c a t e d in t h e p r o p o s e df r a m e w o r k . T
h e u s e o f a N O M A D 2 0 0 m o b i l e u n i t is p r o v i d
i n g t h e w a y t o t e s t t h e a p p r o a c h i n a r e a l c
as e .F u r t h e r r e s e a rc h e s in o u r l a b o r a t o r y
i n c l u d e t h e s ea r c h o f a n o p t i m a l p a t h o n a
f u z zy m a p . T h i s is a ni n t r i g u i n g p r o b l e m a
s t h e u s u a l d e f i n i t i o n s o f o p t i m a l i t y , e
.g . t h e s h o r t e s t p a t h , a r e d i ff i cu l t to a p p
l y i np r e s e n c e o f u n c e r t a in t y , a s i n t h e ca
s e o f s e n s o r - b a s e d r e c o n s t r u c t i o n o f t h
e e n v i r o n m e n t . N e w m e t h o d s a r e
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
12/13
26 M . P o h m i e t a l . / F u z z ) S e t s a n d S y s t e m
s 6 9 ( 1 9 9 5 ) 1 5 2 7
2 0
1 5
1 0
2 5 5 7 5 i0 12 5 15 17 5 20Fig. 14 . Enlarge d view f rom Eq.
(18) and BS opera tors .
r e q u i r e d : a v i a b l e p o s s i b i l i t y is a t r a
d e - o f f b e t w e e n l e n g t h a n d r is k ; t h i s a g a
i n c a l ls fo r a f u z z y a p p r o a c h .A m o n g t h e a l
g o r i t h m s u n d e r i n v e s t i g a t i o n s t h e r e a r
e b o t h g r a p h - s e a r c h i n g (e .g . A * ) a n d p o t e
n t i a l b a s e do n e s .
cknowledgmentsT h i s w o r k h a s b e e n p a r t i a l l y s
u p p o r t e d b y M . U . R . S . T . 4 0 f u n ds .
References[ 1 ] H . Ba nde me r a nd W. Na t he r , F u z z y D
a t a A n a l y s i s (Kluw er Academ ic Publ ishers , Dord recht ,
1992) .[2] I .J. Co x and G .T. Wilfong, A u t o n o m o u s R o b
o t V e h ic l es (Springer, Berlin, 1990).[3] J . Dom bi , A
genera l c lass of fuzzy opera tors , the d e morg an c lass of
fuzzy opera tors and fuzziness meas ure induced by fuzzyopera tors
, F u z z y S e t s a n d S y s t e m s 8 [1982).[ 4 ] H . F . Dur
r a n t - W hy t e , I n t e g r a t i o n C o o r d i n a t i o n
a n d C o n t r o l c ~f M u l t i - s e n s o r R o b o t S y s t
e m s , Vol. SECS 36, In t e rn a t i o n a l S e r i e s i n
E n g i n e e r i n g a n d C o m p u t e r S c i e n e e (Kluw
er Academ ic Publ ishers , Norw el l , MA, 1988).[5] A. El fes and
H.P. Moravec , High resolut ion maps f rom wide angle sonar , I E E
E l n t e r n a t . C o n j . o n R o b o t i c s a n d A u t o m a
t i o n ,St. Louis, M O, (1985) pp. 116 121.[6] G.D. Hager , T a s
k - D i r e c t e d S e n s o r F u s i o n a n d P l a nn i n g :
A C o m p u t a t i o n a l A p p r o a c h , Vol. SECS 99, In t e
rn a t i o n a l S e r i e s i n
E n g i n e e r i n g a n d C o m p u t e r S c i e n c e (Kluw
er Academ ic Publishers, Norw el l , MA, 1990).[ 7 ] J . Hwa n , L
. Don g a nd W. Cho , Phys i c a ll y ba s e d s e ns o r mode l i
ng f o r a s ona r ma p i n a s pe c u l a r e nv i r o nm e n t I
E E E l n t e r n a t . C o n f
o n R o b o t i c s a n d A u t o m a t i o n , Nice, Fra nce
(1992) pp. 1714~1719.
-
8/13/2019 (1995) Fuzzy Logic and Autonomous Vehicles -
Experiments in Ultrasonic Vision
13/13
M . P o l o n i e t a l. / F u z z ) , S e t s a n d S y s t e m
s 6 9 ( 1 9 9 5 ) 1 5 2 7 27[8] J.M. Keller and R. Krishnapuram,
Fuzzy sets methods in compute r vision, in: R. Yager and L.A.
Zadeh, Eds., A n I n t r o d u c t i o n t o
F u z z y L o g i c A p p l i c a t i o n s i n I n t e l l i g
e n t S y s t e m s Kluwer Academic Publishers, Dordrecht,
1992).[9] A. Kemurdjian, V. Granov and U. Mishkinyuk, Small
marsokhod configuration, I E E E l n t e r n a t . C o n f o n R o
b o t i c s a n d A u t o m a t i o nNice, France 1992) pp.
165-168.
[10] G.J. Klir and T.A. Folger, F u z z y S e t s , U n c e r t
a i n t y a n d I n J b r m a t i o n Prentice-Hall, Englewood
Cliffs, N J, 1988).[11] E. Krotkov and R. Simmons, Performance of a
six-legged planetary rover: Power, posi tioning and autonomous
walking, I E E E
l n t e r n a t . C o n f . o n R o b o t i c s a n d A u t o m
a t i o n , Nice, France 1992) pp. 169 174.[12] R. Kuc and M.W.
Siegel, Physically based simulation model for acoustic sensor robot
navigation, I E E E T r a n s . P a t t e r n A n a l y s i sM a c
h i n e I n t e l l i g e n c e PAMI-9 6) 1987) 766 778.
[13] Y. Maeda et al., Hierarchical control for autonomous mobile
robo ts with behaviour decision fuzzy algorithm, IEEE In ter na t .
C on f .o n R o b o t i c s a n d A u t o m a t i o n , Nice,
France 1992).
[14] C. Pal and J. Bezdek, F u z z y M o d e l s f i~ r P a t t
e r n R e c o g n i t i o n 1EEE Press, New York, 1991).[15] S.K.
Pal, Fuzziness, image information and scene analysis, in: R. Yager
and L.A. Zadeh, Eds., A n I n t r o d u c t i o n t o F u z z y L o
g i c
Appl i ca t ions in In t e l l i gen t Sys t ems Kluwer Academic
Publishers, Dordrecht, 1992).[16] Polaroid Corporation, P o l a r o
i d U l t r a s o n i c R a n g i n g S y s t e m H a n d b o o k A
p p l i c a t i o n N o t e s ~ T e c h n i c a l P a p e r s .[17]
Polaroid Corporation, U l t r a s o n i c R a n g i n g S y s t e m
.[18] F.G. Pin and H. Watanabe et al., Autonomous navigation of a
mobile robot using custom designed qualitative reasoning vlsi
chips,
I E E E I n t e r n a t . C o n f . o n R o b o t i c s a n d A
u t o m a t i o n , Nice, France 1992).[19] H. Prade and D. Dubois,
A review of fuzzy set aggregation connectives, Inform. Sci . 36
1985).[20] A. Pruski and C. Bourkis, The vahm project: a coopera
tion between an autonomous mobile platform and a disabled person, I
E E E
ln ter na t . C on f . on Robot i cs and Au tomat ion , Nice,
France 1992).[21] B. Wilcox and L. Matthies et al., Robot ic
vehicles for planeta ry exploration, I E E E l n t e r n a t . C o
n j . o n R o b o t i e s a n d A u t o m a t i o n ,Nice, France
1992) pp. 175 180.
[22] R.R. Yager, On a general class of fuzzy connectives, I n t
e r n a t . J . F u z z y S e t s a n d S y s t e m s 4 1980).[23]
H.J. Zimmermann, F u z z y S e t T h e o r y a n d I t s A p p l i
c a t i o n s Kluwer Academic Publishers, Dordrecht, 1991).