Embed Size (px)
Citation preview

Optical measurementof partially specular surfaces by combining
pattern projection and deflectometrytechniques
Marc Sandner
Vortrag zur Masterarbeit im Studiengang Elektro‐ und Informationstechnik
Vertiefungsrichtung Photonik an der Fernuniversität Hagen

2
1. Einleitung: Geometrische Optik, Reflexion an Oberflächen
2. Geometrisch‐optische Phasenmesstechniken (GOP)
3. Rauschabschätzung bei GOP‐Messungen
4. Motivation
5. Kombinierte GOP : Hybridreflektometrie
6. Messbeispiele
7. Zusammenfassung, Fazit und Ausblick

Einleitung: Geometrische Optik
3
Geometrische Optik, Strahlenoptik:
Betrachtung eines Lichtwellenfeldes als Strahl(Polarisation & Phase werden nicht betrachtet)
λ

Einleitung: Reflexion an Oberflächen
4
Reflexionsgesetz:
θi = − θr

Reflexionsverhalten ist abhängig von Oberflächenrauheit:
Ideal glatte Oberfläche:
Ideal matteOberfläche:
HybrideOberfläche:
Spiegel Papier Technische Oberfläche
GerichteteReflexion
StreuungReflexion+ Streuung
Einleitung: Reflexion an Oberflächen
5

Geometrisch‐optische Phasenmesstechniken (GOP)
6
GOP:
Geometrisch‐optische Phasenmesstechniken
• Physikalisches Modell: Strahlenoptik
• Phasenmessung:
• Signalquelle liefert flächige, sinusförmige Intensitätsmuster
• Messobjekt moduliert das Muster
• Aufnahme des modulierten Musters mit Kamera
• Ermittlung der Musterposition (Phase), geometrisch‐optische Berechnung der Oberflächengeometrie

Geometrisch‐optische Phasenmesstechniken (GOP)
7
Geometrisch‐optische Phasenmessung:

Geometrisch‐optische Phasenmesstechniken (GOP)
8
Aufgenommene Helligkeitsverteilung
Geometrisch‐optische Phasenmessung
255
0
g

Geometrisch‐optische Phasenmesstechniken (GOP)
8
Aufgenommene Helligkeitsverteilung
Geometrisch‐optische Phasenmessung
255
0
g

Geometrisch‐optische Phasenmesstechniken (GOP)
8
Aufgenommene Helligkeitsverteilung
Geometrisch‐optische Phasenmessung
255
0
g

Geometrisch‐optische Phasenmesstechniken (GOP)
8
Aufgenommene Helligkeitsverteilung
Geometrisch‐optische Phasenmessung
255
0
g

Geometrisch‐optische Phasenmesstechniken (GOP)
8
Phasenkarte
Geometrisch‐optische Phasenmessung
2 π
0
φ

Geometrisch‐optische Phasenmesstechniken (GOP)
8
Demodulierte Phasenkarte
Geometrisch‐optische Phasenmessung
10 π
0
φ

Geometrisch‐optische Phasenmesstechniken (GOP)
9
Nach: Beyerer et al: Automatische Sichtprüfung: Grundlagen, Methoden und Praxis der
Bildgewinnung und Bildauswertung. Berlin: Springer, 2012
Optical 3Dmetrologytechniques
Triangulation
Intensity
Optical path length
Optical phase
Time of flight
active
passive
Pattern phase
Fringe Projection (FP)
Phase Measuring Deflectometry (PMD)
Line / Pattern Projection
Moiré
Photogrammetry
Light‐field imaging
…
Confocal microscopy
…
Interferometry
…
LiDAR

Streifenprojektion
• Muster wird projiziert, Objekt streut Licht
• Objektform wird berechnetaus Phasenmessung
• Messunsicherheit: Einige µm.
GOP: Streifenprojektion
10

Streifenprojektion
• Muster wird projiziert, Objekt streut Licht
• Objektform wird berechnetaus Phasenmessung
• Messunsicherheit: Einige µm.
GOP: Streifenprojektion
10

(Phasenmessende) Deflektometrie
• Muster auf Monitor,Objekt reflektiert Licht
• Oberflächennormale durch Interpretation der Phasenmessung
• Messunsicherheit: Einige Hundert nm.
GOP: Deflektometrie
11

(Phasenmessende) Deflektometrie
• Muster auf Monitor,Objekt reflektiert Licht
• Oberflächennormale durch Interpretation der Phasenmessung
• Messunsicherheit: Einige Hundert nm.
GOP: Deflektometrie
11

Deflektometrisches Problem
Keine eindeutige Oberflächennormalenverteilungaus Phasendaten.
GOP: Deflektometrie
12

Deflektometrisches Problem
Keine eindeutige Oberflächennormalenverteilungaus Phasendaten.
GOP: Deflektometrie
12

Regularisierung mittels Referenzabstand (RDR) ‐ Ansatz:
Abstand d eines einzelnen Punktes bekannt.
Realisierung: • Manuelle Justierung (d ≈ 250 µm)• Messung mit Distanzsensor (d ≈ 1 µm, Preis = 10k€)
GOP: Deflektometrie
13

GOP: Deflektometrie
Einfluß der Abstands d zur Referenzhöhe auf dem Messfehler:
Bei manueller Justierung (d ≈ 250 µm)Messfehler der Grobform von ca. 1 µm.
Formdifferenzbild:
Sandner, M. et al.: Absolut – Abstandsreferenz für die Streifenreflexionstechnik zur Verringerung systematischer
Messfehler, DGaO Proceedings 2011
14
0 nm
880 nm

Regularisierung mittels IniShape (ISR) ‐ Ansatz:
Grobform des Objektes ist bekannt.
• Keine manuelle Justierung nötig• Objektform muss vor der Messung bekannt sein!
GOP: Deflektometrie
15

Regularisierung mittels IniShape (ISR) ‐ Ansatz:
Grobform des Objektes ist bekannt.
• Keine manuelle Justierung nötig• Objektform muss vor der Messung bekannt sein!
GOP: Deflektometrie
15

Rauschabschätzung bei GOP‐Messungen
16
Messrauschen kann aus Einzelmessung berechnet werden 1,Streifenmodulation M ist ausschlaggebender Parameter 2 :
Signal‐Rausch‐Abstand: φφσ
1 Fischer, M. et al: Vorhersage des Phasenrauschens in optischen Messsystemen mit strukturierter Beleuchtung, tm ‐
Technisches Messen 79, 2012
2 Bothe, T.: Grundlegende Untersuchungen zur Formerfassung mit einem neuartigen Prinzip der
Streifenprojektion und Realisierung in einer kompakten 3D‐Kamera. (Dissertation), BIAS‐Verlag, 2008

Rauschabschätzung bei GOP‐Messungen
Abhängigkeit der Streifenmodulation M von Objektrauheit Ra
17
0.001
0.010
0.100
1.000
0.01 0.1 1 10
Average fringe m
odulation M
Nominal average Roughness Ra / µm
Average M (PMD)Average M (FP)

0.00
0.05
0.10
0.15
0.20
0.25
0 100 200 300 400 500 600 700 800
Average fringe m
odulation M
Fringe Period P / pixel
Average M (PMD)Average M (FP)
Rauschabschätzung bei GOP‐Messungen
Abhängigkeit der Streifenmodulation M von Streifenperiode P
18

Motivation
19
Geometrisch‐optische Phasenmesstechniken (GOP) :
• Streifenprojektion (FP)
• Deflektometrie (PMD)
Eigenschaften: Hochpräzise, schnell, berührungslos, robust.

Motivation
20
Vielseitig einsetzbar.
Einsatz von GOP für:
• Diffus streuende Oberflächen (FP)
• Gerichtet reflektierende Oberflächen (PMD)

Motivation
20
Vielseitig einsetzbar.
Einsatz von GOP für:
• Diffus streuende Oberflächen (FP)
• Gerichtet reflektierende Oberflächen (PMD)
Eingeschränkte Verwendbarkeit für Oberflächen mit unbekannten oder lokal variierenden Reflexionseigenschaften!

Motivation
20
Vielseitig einsetzbar.
Einsatz von GOP für:
• Diffus streuende Oberflächen (FP)
• Gerichtet reflektierende Oberflächen (PMD)
Eingeschränkte Verwendbarkeit für Oberflächen mit unbekannten oder lokal variierenden Reflexionseigenschaften!
Kombination der Messtechniken

Kombinierte GOP: Hybridreflektometrie
Hybridreflektometrie:
• Kombinierter FP / PMD ‐ Aufbau
• Fusion der Messdaten
21

Kombinierte GOP: Hybridreflektometrie
Hybridreflektometrie Testaufbau:
Senke:Messkamera
Senke : Hilfskamera für
Streifenprojektions‐Messung
Quelle: MustergeberTFT‐Monitor
Quelle : MustergeberProjektor
22

Kombinierte GOP: Hybridreflektometrie
Messprozess:
23

Kombinierte GOP: Hybridreflektometrie
Messprozess:
1. Streifenprojektions‐Messung
23

Kombinierte GOP: Hybridreflektometrie
Messprozess:
1. Streifenprojektions‐Messung
2. Deflektometrie‐Messung
23

Kombinierte GOP: Hybridreflektometrie
Datenfusion (HR‐Regularisierung):
Verwendung der Formdaten aus FP‐Messungzur Normalenbestimmung aus PMD‐Messung
Hiermit iterative Berechnung der Form:
• Berechnung der Normalenverteilung mittels Systemkalibrierung
• Berechnung der Form aus Integration der Normalenverteilung
• Abgleich der berechneten Form mit initialen FP ‐ Formdaten
24

Messungen
Messungen mit FP, PMD (HRR, ISR, RDR)
Testobjekte:Oberflächen mit hybridem Reflexionsverhalten(streunend und gerichtet reflektierend)
I. Stetige Oberflächen mit örtlich homogenen Reflexionsverhalten:
a. Plane Oberfläche (Invar)
b. Hohlspiegel (Al)
II. Freiformobjekt (Al) mit örtlich variierendem Reflexionsverhaltenund unstetiger Oberfläche
Schätzer für Wiederholpräzision:Standardabweichung aus je 3 Messungen
25

Messbeispiel (Ia) : Ebene Oberfläche
26
Stetige Oberfläche mit örtlich homogener Reflektivität (Ia):
• Ebene metallische Oberfläche (Invar)
• Referenzabstand: z = ‐10 mm

Messbeispiel (Ia) : Ebene Oberfläche
27
Streifenmodulation M für Phasenmessung mit
Streifenprojektion (FP, Kamera 1) und Deflektometrie (PMD):
Streifenbreite:
FP: 12 Pixel PMD: 240 Pixel
24 %
6 %
M (FP)
14 %
6 %
M (PMD)

Messbeispiel (Ia) : Ebene Oberfläche
28
Streifenprojektion: Gemessene Form z, Tiefpassgefiltert & Original
z (FPg) z (FP)
‐13 µm +13 µm

Messbeispiel (Ia) : Ebene Oberfläche
29
Form z von Streifenprojektion und Deflektometrie (HDR, ISR, RDR)
‐13 µm +13 µm
z (FPg)
z (ISR) z (RDR)
z (HDR)

z (ISR ‐ FPg)
Messbeispiel (Ia) : Ebene Oberfläche
30
Differenz zu Form z von Streifenprojektionsmessung:
‐8 µm +8 µm
z (RDR ‐ FPg)
z (HDR ‐ FPg)

Messbeispiel (Ia) : Ebene Oberfläche
31
Standardabweichung σzp , d.h.Wiederholpräzision der Form z
für Streifenprojektion und Deflektometrie
0.00 µm
σzp (FP)
4.00 µm
0.65 µm
σzp (HDR)
0.77 µm
0.00 µm
σzp (RDR)
0.07 µm
7.10 µm
σzp (ISR)
7.25 µm

Messbeispiel (Ib) : Hohlspiegel
32
Stetige Oberfläche mit örtlich homogener Reflektivität (Ib):
• Diamantgedrehter sphärischer Spiegel, r = 200 mm (Al)
• Variation des Referenzabstands: z = {‐10 mm, 0 mm, 10 mm}

Messbeispiel (Ib) : Hohlspiegel
33
Stetige Oberfläche mit örtlich homogener Reflektivität (Ib):

Messbeispiel (Ib) : Hohlspiegel
34
Streifenmodulation M für Phasenmessung mit
Streifenprojektion (FP, Kamera 1,2) und Deflektometrie (PMD):
Streifenbreite:
FP: 50 Pixel PMD: 100 Pixel
40 %
30 %
M (PMD)
30 %
0 %
M (FP)

Residuen der Form z von Streifenprojektion und Deflektometrie (HDR, ISR, RDR) nach Abzug einer Sphäre aus numerischem Fit:
‐0.35 µm
z (ISR)
0.35 µm
‐0.35 µm
z (HDR)
0.35 µm
Messbeispiel (Ib) : Hohlspiegel
35
‐0.35 µm
z (RDR)
0.35 µm
‐35 µm
z (FP)
35 µm

Messbeispiel (Ib) : Hohlspiegel
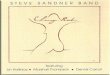
36
Aus Messdaten ermittelter Radius der Oberfläche:

Messbeispiel (Ib) : Hohlspiegel
37
Aus Messdaten ermittelter Radius der Oberfläche:
Geringste Differenz zu nominellen Radius
für Daten aus HRR‐Messung

Messbeispiel (II) : Freiform
38
Unstetige Oberfläche mit örtlich variierender Reflektivität (II):
• Unstetige Freiformoberfläche (Al) mit Regionen R1, R2, R3, R4
• Referenzabstand: z = 0 mm

Messbeispiel (II) : Freiform
39
Streifenmodulation M für Phasenmessung mit
Streifenprojektion (FP, Kamera 1,2) und Deflektometrie (PMD):
Streifenbreite:
FP: 24 Pixel PMD: 24 Pixel
40 %
0 %
M (PMD)
40 %
0 %
M (FP)

Form z aus Streifenprojektionsmessung:
Histogramm:
Messbeispiel (II) : Freiform
40
‐1.3 mm
z (FP)
2.1 mm

Wiederholpräzision der Form z für Streifenprojektionsmessung:
Messbeispiel (II) : Freiform
41
0 µm
σzp (FP)
20 µm

Hybridreflektometrie ‐ Auswertung:
Vorverarbeitung der FP‐Formdaten:
• Interpolation fehlender Formdaten als gültigen Daten (Nicht abgeschattet, Standardabweichung < 7 µm)
HRR‐Auswertung:
• Individuelle Auswertung der gültigen Bereiche R1, R3 und R4
Messbeispiel (II) : Freiform
42

Form z in gültigen Bereichen R1, R3 und R4
aus Hybridreflektometriemessung:
Messbeispiel (II) : Freiform
43
‐1.3 mm
z (HRR)
2.1 mm

Wiederholpräzision der Form z für Hybridreflektometriemessung
in den Bereichen R1, R3 und R4:
Messbeispiel (II) : Freiform
44
0.60 µm
σzp (HRR)
0.66 µm
0.89 µm
σzp (HRR)
0.96 µm
0.95 µm
σzp (HRR)
1.02 µm

Residuen der Form z aus HRR‐Messung nach Abzug einer Sphäre aus numerischem Fit (rFit = 379,047 mm ± 0,007 mm),
Messbeispiel (II) : Freiform
45
‐1.8 µm
z (HRR)
1.8 µm

Vergleich Hybridreflektometriemessung
zu mechanischer Messung (Messschieber):
Maximale Abweichung der Flächenschwerpunkte von 23 µm
Messbeispiel (II) : Freiform
46
RegionHeight z in reference to R3:
Deviation of HRR measurement to mechanical measurement
R1 23 µm ± 80 µm
R2 9 µm ± 81 µm
R4 16 µm ± 80 µm

Formdatenaus kombinierter Messung :
Deflektometrie‐Messdaten (HRR)
Streifenprojektions‐Messdaten
Messbeispiel (II) : Freiform
47
‐1.3 mm
z (HRR, FP)
2.1 mm

Zusammenfassung
48
• Hybridreflektometrie:Kombination von Messdaten aus Streifenprojektions‐ (FP) und (1‐Kamera‐basierter) deflektometrischer (PMD) Messung
• Hybridreflektometrie‐Regularisierung (HRR): Bestimmung der Normalenverteilung auf einer Oberflächedurch Interpretation von Phasenmessdaten aus PMDmittels Formdaten aus FP

Zusammenfassung
49
Mit HRR erzielte Messergebnisse:
• Verbesserte Auflösung in Formdaten im Vergleich zu Streifenprojektion (FP), vergleichbar mit anderen 1‐Kamera PMD‐Ansätzen (RDR, ISR)
• Messbeispiel Hohlspiegel: Beste Treue zu nominellen Radius im Vergleich zu FP sowie RDR ‐ PMD, ISR ‐ PMD
• Geringere Anforderungen an Objektoberfläche:• Lokal unstetige Oberflächen messbar• Kein Justierung des Objekts notwendig• Unbekannte Formen messbar
im Gegensatz zu anderen 1‐Kamera PMD‐Ansätzen (RDR, ISR)

Zusammenfassung
50
Regularisierungs‐methode
Fixpunkt(RDR)
Ini‐Shape (ISR)
Hybridreflektometrie(HRR)
Lokal unstetige Oberflächen x x ✓UnbekannteObjektform ✓ x ✓Unbekannte
Objektposition x ✓ ✓

Fazit
51
Erste Formmessungen mittels neuartiger HRR‐basierten
Deflektometrie wurden erfolgreich demonstriert.
Hybridreflektometrie hat ein großes Potenzial
für die Messung von teilreflektierenden Oberflächen.

Ausblick
52
• Datenfusion:
• Entwicklung einer Metrik für die Güte von FP und PMD‐Messungen (u.a. aus Streifenmodulation) im Bezug auf erzeugte Formdaten
• Entwickelung eines Least‐Squares‐basierten Ansatzes zur Datenfusion; Gewichtung von FP, PMD‐Phasendaten mittels Messdatengüte
• Entwicklung einer kombinierten Systemgeometrie‐Kalibrierung
• Automatisierte Anpassung der Musterperioden



Rauschabschätzung bei GOP‐Messungen
Lokale Streifenmodulation M:
Streifenprojektions ‐Messung Deflektometrie ‐Messung

Rauschabschätzung bei GOP‐Messungen
Lokale Streifenmodulation M:
M (Streifenprojektion) M (Deflektometrie)

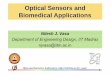
Normalenintegration (HRR)
Shape data zFPfrom FP measurement
Integration Loop
Calculate (x,y) from z and rays of sight
Calculate normals from ϕPMD, system geometry
and (x,y,z)
Calculate gradientsfrom (x,y,z) and normals
z ≔ Integrate (gradients)
Add offset:z ≔ z + zFP
Point cloud (zPMD , zPMD , zPMD )from HRR evaluated PMD measurement
Input: ϕPMD , z ≔ zFP , zFP≔ average(zFP)
Phase ϕPMD
from PMD measurement
Last loop iteration?
Output: zPMD ≔ z
NO YES
Calculate (xPMD, yPMD) from zPMD and rays of sight

Messbeispiel (Ib) : Hohlspiegel
Aus Messdaten ermittelter Radius der Oberfläche:
dz1 =
dz,Ref – 10 mm
dz2 =
dz,Ref
dz3 =
dz,Ref + 10 mm
rfit / mm (FP) 199.866 ± 0.006 199.878 ± 0.006 199.639 ± 0.012
rfit / mm (HRR) 200.096 ± 0.002 200.197 ± 0.015 200.232 ± 0.003
rfit / mm (ISR) 200.767 ± 0.007 200.843 ± 0.002 200.868 ± 0.022
rfit / mm (RDR) 193.407 ± 0.002 200.278 ± 0.006 207.920 ± 0.005

Dateninterpolation (FP)
Eingabe‐bild
Eingabe‐maske
Ausgabe‐maske
Ausgabe‐bild