Embed Size (px)
Citation preview
Research ArticleA Cost-Efficient Autonomous Air Defense System forNational Security
Fazle Rabby Khan 1 Md Muhabullah 1 Roksana Islam 1
Mohammad Monirujjaman Khan 1 Mehedi Masud 2 Sultan Aljahdali 2
Avinash Kaur 3 and Parminder Singh 3
1Electrical and Computer Engineering Department North South University Dhaka 1229 Bangladesh2Department of Computer Science College of Computers and Information Technology Taif University P O Box 11099Taif 21944 Saudi Arabia3School of Computer Science and Engineering Lovely Professional University Phagwara India
Correspondence should be addressed to Mehedi Masud mmasudtuedusa
Received 22 March 2021 Revised 16 May 2021 Accepted 18 June 2021 Published 25 June 2021
Academic Editor Jialiang Peng
Copyright copy 2021 Fazle Rabby Khan et al (is is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
In a country air defense systems are designed to reduce threats efficiently An air defense system is a fundamental part of anycountry because it provides national security (is study presents an autonomous air defense system (AADS) development thatwill automatically detect aerial threats (eg drones) and target them without any human intervention(e AADS is implementedusing radar camera and laser gun (e radar system dynamically emits microwaves and detects moving objects around it Ittriggers the camera system if it senses the frequency of any aerial threat (e camera receives the radarrsquos signal and detects using aneural network algorithm whether it is a threat or not Neural network algorithms are used for the detection and classification ofobjects (e laser gun locks its target if the live video feed classifies an object as a more than 75 threat In the detection stage anaverage loss of 0184961 was achieved using YOLOv3 and 0155 using the Faster-RCNN (is system will ensure that no humanerrors are made while detecting threats in a region and improve national safety
1 Introduction
(e autonomous air defense system (AADS) is an integrateddefensive unit capable of detecting aerial threats and re-ducing the manpower needed to defend the country Cur-rently Bangladesh military uses tanks armored vehiclesartillery and rocket projectors for defense (ese require alot of human resources and training which are costly andinefficient respectively At present military personnels arefacing several problems due to the existing defense systemrsquosrigidity Most importantly tanks artilleries and othermachines require around three to four people to use [1] It isexpensive as it needs training and it is inefficient as wellAdditionally the people who operate these machines can gothrough many disturbances depending on the area andaerial threats are harder to target since they are moving
objects As a result the chance of human errors may increaseto a great extent while shooting the targets Last to cope withthe latest electronic warfare the autonomous air defensesystem is a must for national security
We need this system to compete with global defenseindustries as it is currently being deployed in other coun-tries Also this system can be exported to other countriesand increase foreign exchange (is system can be deployedin frigates tanks towers or even aircraft to block incominghits
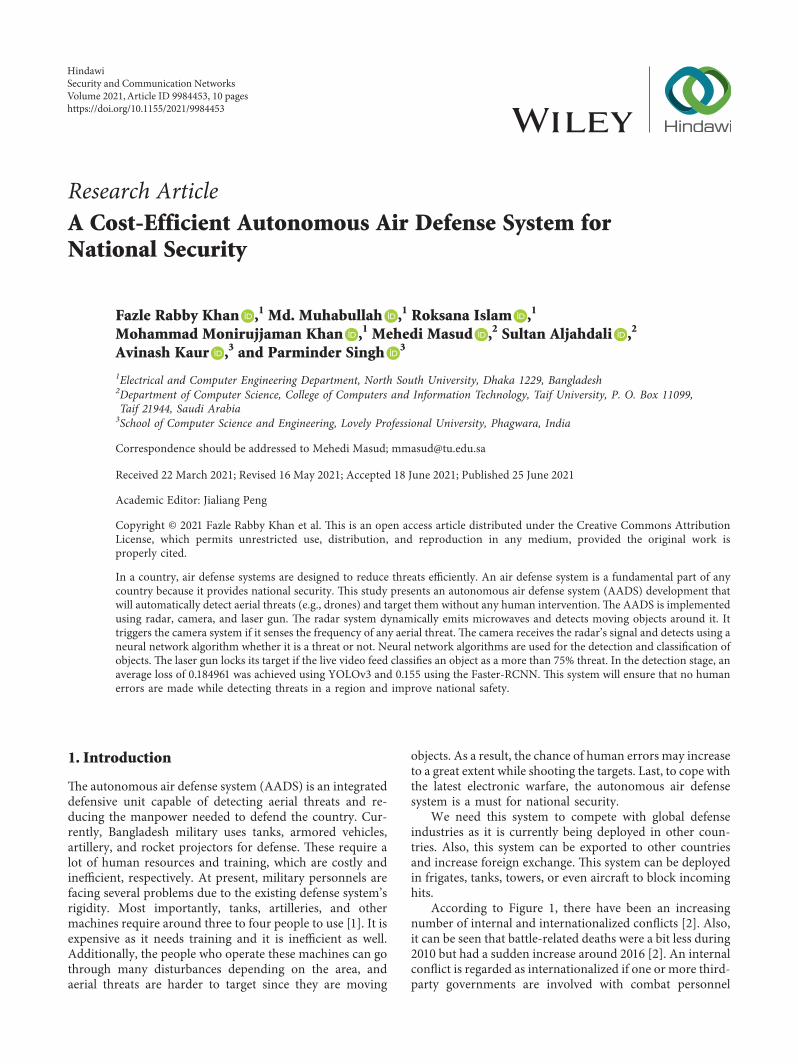
According to Figure 1 there have been an increasingnumber of internal and internationalized conflicts [2] Alsoit can be seen that battle-related deaths were a bit less during2010 but had a sudden increase around 2016 [2] An internalconflict is regarded as internationalized if one or more third-party governments are involved with combat personnel
HindawiSecurity and Communication NetworksVolume 2021 Article ID 9984453 10 pageshttpsdoiorg10115520219984453
supporting the objective of either side [2] From the re-search it is also evident that countries are only increasing thenumber of troops sent to other countries for battling con-flicts It shows urgency for Bangladesh to find efficient waysto prevent these conflicts [2] and the importance of anautomated system to handle this situation
(e study is organized as follows Section 2 describes theexisting works related to the AADS Section 3 presentsmethods which include procedures and algorithms fortraining and detection Section 4 describes the result andanalysis and Section 5 presents the conclusion
2 Related Works
At the moment all defense systems have manual controlsover the systems Eventhough many sensors and radars areused for detection now there are fewer implementations ofsystems with cameras locating the targets and automaticallyfiring them by image processing
In [3] thermal cameras and acoustic sensors are used todetect and track drones automatically Sensor fusion hasbeen used to make the system more robust and avoid falsedetection but they did not use any deep learning methods(e study by Unlu et al [4] presents YOLO convolutionalneural network-based autonomous drone surveillance andtracking architecture (ermal images are used to classifydrones into 4 categories (drone bird plane and back-ground) In [5] synthetic radar data and real image data areused to track a moving target Tracking performance isimproved using data fusion and agile edge processing In [6]PTZ (pan tilt zoom) camera and optical and thermalsensors are used to detect boats YOLOv3 is used on theCOCO dataset for detecting boats In [7] YOLOv3 andFaster-RCNN are used to detect power transmission towersAlso this study indicates that Faster-RCNN has better de-tection performance and YOLOv3 has better detectionspeed which can be used in real-time object detection [7] In[8] a dual camera is used to develop a multiple target
zooming system Cameras used for this system are wide-viewcameras and ultrafast mirror drive pan-tilt cameras [8]
In [9] turrets on the tanks can be controlled via eyemovements and blinking Images of the eyes are taken ascontrols so that four people are no longer needed and it iseasier to control the system In [10] camera surveillance isused to look for targets and remote controls are used to targetthe threats Lots of kinematics are used in this system In [11]an automatic detection of the target using a camera at thegunrsquos point is proposed (ey use image processing tech-niques to detect targets from a distance from pictures that thegun points to In [12] a very similar proposal for automat-ically detecting missiles using image processing and targetingaerial threats is proposed(e study by Anwar et al [13] is themost recent study that proposes an automatic targetingsystem for gun turrets using deep learning methods
(e last system that was proposed did not have anyautomatic detection of nearby objects It still needs manuallymoving the camera towards the target for detection Oursystem proposes a radar that detects any nearby movingobjects (e camera will automatically point towards thetarget for detection and verify whether the target is a droneor not
(e authors in [14ndash16] illustrates that secure data replicasin distributed management of identity and authorizationpolicies in smart city applications can be mitigated byblockchain technology In [15] a novel algorithm usingsynergetic neural networks to ensure the robustness andsecurity of digital image watermarking is proposed In [17] aninnovative infrastructure of secure scenario combining In-ternet of (ings (IoT) with cloud computing which operatesin a wireless-mobile 6G network for managing big data onsmart buildings is proposed Authors in [18 19] focus on thesecurity architecture of the Internet of (ings (IoT) Radiofrequency identification (RFID) and wireless sensor network(WSN) can be the enabling factors in IoT development In[20] the multifeature fusion paradigm of images is presentedand helps describe the image pattern more clearly (e study[21] shows that if digital fingerprint image quality degrades toa certain level it decreases the fingerprint recognition ac-curacy Unlike fingerprint recognition accuracy the objectdetection accuracy of YOLOv3 depends on how much areathe object covers in a particular image In [22] four-imageencryption scheme is proposed as an image encryptiontechnique that can protect usersrsquo privacy in online platformssuch as cloud computing or social networks
(is study focuses on building autonomous air defensesystems combining deep learning methods alongside a cheapcamera and microwave sensors (e performance betweenthe Faster-RCNN and YOLOv3 has been considered and thereal-time detection speed is given the most priority Mi-crowave radar sensors are used for the early detection ofdrones
3 Method and Methodology
(e AADS is a system that would provide safety from in-coming aerial threats (eg drones) by locking targets (isdevice would detect and classify incoming aerial intruders by
01950 1960 1970 1980 1990 2000 2010 2018
10
20
30
Num
ber o
f con
flict
s 40
50
Extrasystemic conflict
Interstate conflict
Internal conflict
Int internal conflict
Figure 1 Number of national and international conflicts
2 Security and Communication Networks
image processing lock multiple targets at a time and shootsequentially nearby threats (e area coverage by the AADSwill be 360 degrees(is device will work in a short range (20meters) and can also be used for a particular area orbuildingrsquos safety system
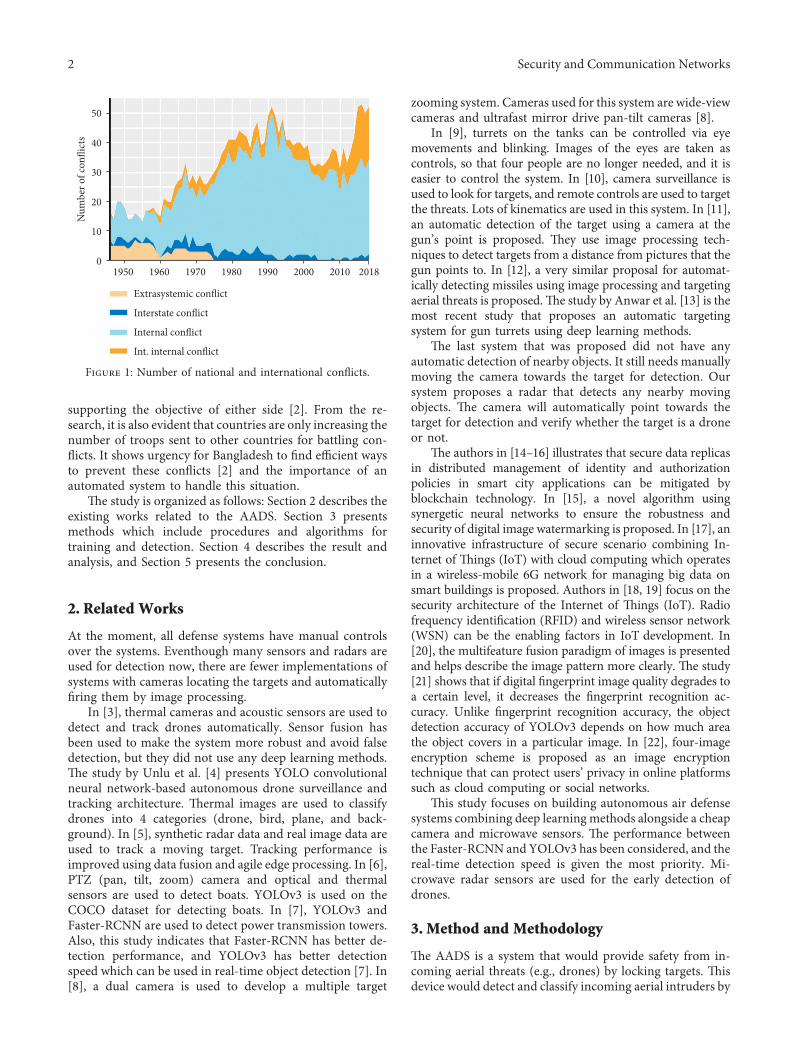
31 Procedure At first a radar system will be integrated bythe radar modules for getting early warnings to the systemand direction (is custom radar system can detect aerialmovement After the detection our camera and gunlaserwill be activated and turned in that direction Only droneswill be classified and detected for this device and will notpoint to innocent birds humans or any natural beings (edevice will check whether the classified object is a drone ornot When this device detects and classifies the drone thetarget will be locked Finally a laser gun will pointfire themoving drones (e operation of the AADS is shown as aflowchart in Figure 2
We used an HB100 X-band microwave sensor and anRCWL-0516 microwave radar sensor module as shown inFigure 3 RCWL-0516 radar module only gave the result ofthe detected object However we needed a radar module todetermine the frequency ofmoving objects FromHB100 wegot the frequency of moving objects
(e pi camera has been used for drone detection andclassification (is camera can be used to take pictures forimage processing and identify whether the object is a droneor not For moving the camera and laser we have used 2servo motors One is used to rotate horizontally and theother is used to rotate vertically(erefore the coverage areaof the AADS will be 360 degrees
32 YOLO (You Only Look Once) Algorithm (e AADSuses the YOLOv3 algorithm for drone detection and clas-sification(e architecture of the YOLOv3 algorithm is shownin Figure 4 For feature extraction we have used Darknet-53It has 53 convolutional layers which is an improved version ofYOLOv2 Darknet-19 1times 1 and 3times 3 convolutional layersare used in YOLOv3 At first it resizes the image then runs aconvolutional neural network (CNN) to an image and at theend the resulting detection is constrained by the confidenceof the model [24] Batch normalization and stride-2 con-volutions are used in YOLOv3 Inputs are normalized bybatch normalization within the deep network [23] In filtersize 3times 32 here ldquo2rdquo is represented by stride-2 It basicallyresizes the input into half For example if the input size is256times 256 then the output size will be 128times128
For bounding box prediction 4 coordinates are used topredict for each bounding box Coordinates for eachbounding boxes are tx ty tw th (e cell in which thebounding boxrsquos center falls is offset from the top left cornerof the image by (cx cy) [23] (e width and height of thebounding box are calculated by k-means which are pw andph bx by bw bh are the actual coordinates of the predictionbounding box which can be determined using the formula
bx σ tx( 1113857 + cx
by σ ty1113872 1113873 + cy
bw pwetw
bh pheth
(1)
33 Faster-RCNN (e Faster-RCNN [25] is a state-of-the-art object detection algorithm that is based on deep neuralnetworks In recent years it is used widely because of itsefficiency taking less time for testing and better perfor-mance For the AADS the Faster-RCNN is also used forreal-time object detection for fast detection of drones (eFaster-RCNN is an improvisation of the Fast-RCNN [26]which had a computational bottleneck in the region proposalnetwork (RPN)(e RPN is the first stage of the RCNN [27]where regions of an object could be found which is alsoknown as regions of interest (ROI) (en features areextracted using different architectures (VGG or ResNet) ofconvolutional neural networks (CNN) (e architectureused in this system for detecting drones is the Faster-RCNNResNet-50 FPN consisting of 50 layers [28 29] Figure 5shows the Faster-RCNN architecture (e ROI pooling layeris the classification process and takes as input the region ofinterests and convolutional features It generates a boundingbox of the objects as well as their class names
Shoot
Rotate camera and laser gun to that direction
Radar scanning
Detection from RADAR
Camera ON
Classify nearest object
Check object= drone
No
No
Yes
Yes (if exists)
Move to nextnearest object
Lock target and point laser gun
Figure 2 Flowchart of the AADS
Security and Communication Networks 3
34 Training and Detection (e dataset collected of dronesconsists of 1359 images from the Kaggle dataset [30] (enthose images were labeled into ldquotxtrdquo format using ldquolabelingrdquofor the YOLOv3 algorithm At first a pretrained coco modelwas fetched for built-in classes (in total 80 classes) (en acustom object detector for drone detection was trained inldquoGoogle Colabrdquo(is custom object detector model was builtfor one class (drone) Also 2000 iterations were completedfor the drone class
4 Result and Analysis
(eAADS was tested on 20 of total image data completelydifferent from the training dataset We achieved a low av-erage loss of 0184961 for our custom object (drone) detectorusing the YOLOv3 algorithm Loss is defined as a badprediction in image processing (e number of losses in-dicates the bad prediction in every image A training modelhas an overfitting problemwhen the loss is zero A high valueof loss also causes errors in prediction (erefore the valueof loss should be close to zero ldquoGoogle Colabrdquo has been used
(a) (b)
Figure 3 Microwave radar sensor module (a) HB100 X-band microwave sensor (b) RCWL-0516 microwave radar sensor module
Filters Size Output
Somax
Type
1times
2times
8times
8times
4times
128 3 times 3Convolutional
256 3 times 3Convolutional
512 3 times 3Convolutional
512 1 times 1Convolutional
256 1 times 1Convolutional
64 1 times 1Convolutional
128 1 times 1Convolutional
128 3 times 32 64 times 64Convolutional
256 3 times 32 32 times 32Convolutional
512 3 times 32 16 times 16Convolutional
1024 3 times 32 8 times 8Convolutional
1024 3 times 3Convolutional
GlobalAvgpool1000Connected
128 times 128Residual
64 times 64Residual
32 times 32Residual
16 times 16Residual
8 times 8Residual
64 3 times 3Convolutional32 1 times 1Convolutional64 3 times 32 128 times 128Convolutional32 3 times 3 256 times 256Convolutional
Figure 4 Architecture of Darknet-53
Region proposal network
Proposals
Classifier
ROI pooling
Feature maps
Conv layers
Image
Figure 5 Faster-RCNN network
4 Security and Communication Networks
to train the model During the training period we generatedthe graph of loss dynamically in ldquoGoogle Colabrdquo (e totalloss chart for the YOLOv3 algorithm is shown in Figure 6Initially the loss was 5 After 2000 completed iterations theloss dropped from 5 to 01 (approximately)
A Faster-RCNN algorithm was also applied to ourdataset to compare the result between YOLOv3 and Faster-RCNN Again the AADS was tested on 20 different imagedata and it achieved a low average loss of 0155 for thecustom object (drone) detector Initially the loss was 0151and the final loss was 0155 (e total loss chart is shown inFigure 7
From Figures 6 and 7 we can see that the Faster-RCNNhas better detection performance than YOLOv3 But forreal-time moving objects YOLOv3 is faster (erefore wechose the model of YOLOv3 for the AADS over the Faster-RCNN(e AADS was able to detect and classify drones andlock the target successfully as shown in Figure 8 (e ro-tation of servos towards the X-axis and Y-axis was alsotested (e AADS was able to move in any direction usingservos and track moving drones towards it (e customdrone detector model was tested using test image data and itcan classify drones successfully in Figure 8
(e two radar modules HB100X and RCWL-0516 detectusing the Doppler radar principle [31 32] Both of them have
different detection distances HB100X can sense 2ndash16 metersand RCWL-0516 can sense 5ndash7 meters [31 32] (ese twomodules were used in parallel to get the absolute movingobjectrsquos data RCWL-0516 sets a Boolean variable TRUE andHB100X measures the distance and velocity of its target ifany object passes through within range (ese values aregenerated by the following Doppler equation
Fd 2VFt
c1113874 1113875Cos θ (2)
where Fd stands for the Doppler frequency V is the velocityof the target Ft stands for the transmitting frequency c is thespeed of light (3times108msec) and θ is the angle between themoving target direction and the axis of the module [33]Transmit frequency (Ft) for HB100 is 10525GHz Wecalculated the speed by using the frequency received fromHB100 (e following equations (equations (3) and (4)) areused to calculate the speed
speedkm
h1113888 1113889
hz
1949 (3)
speedm
h1113874 1113875
hz
3136 (4)
000Current avg loss = 01394 Iteration = 2000 Approx time left = 029 hours
200 400 600 800 1000 1200
Iteration number
1400 1600 1800 2000
In cfg max_batches = 2000
05
10
15
20
25
35
30
40
45Lo
ss
Figure 6 Loss chart for YOLOv3 (e overall loss was 018496
Security and Communication Networks 5
(e radar system is smart enough to work efficiently Itignores the output if the objectrsquos velocity is between 20 and30 mph as it is the average velocity of birds [34]
From RCWL-0516 we got the output that only detectsthe movement For any object moving towards its range(5ndash9m) the radar module can easily detect moving objectsFigure 9 shows the output received from the RCWL-0516microwave radar sensor module
Similarly from the HB100 X-bandmicrowave sensor wegot the detected dronersquos output and the measured Dopplerfrequency Figure 10 shows the output received from theHB100 radar module (2) and (3) are used to calculate thespeed of moving drones
(e purpose of using these radar modules (RCWL-0516and HB100) is to get an early warning of moving aerialthreats In the AADS radar received signals from movingobjects and then the camera and laser gun started theirfunction(e camera was used to classify the object whetherit was a drone or not (e camera and the laser get activatedonly after getting the positive signal from the radar systemSo the AADS does not need to turn the camera and laser onall the time(e radar modules we used were very cheap andrequired less power to run compared to the camera and laser(us the AADS can provide all-time security with less
power which indicates less cost As the camera remained offduring its idle period the life span of the AADS will alsoincrease Table 1 provides the comparison with otherarticles
(e AADS was built with a pan-tilt kit (e laser andcamera were connected on the top of the frame connectedwith a Y-axis rotating servo (horizontal) (e X-axis servowas connected vertically which allowed the upper portion ofthe AADS to move right or left Radar modules wereconnected with Raspberry Pi (e AADS is shown inFigure 9
Some drones are built using electric motors and plasticWe could have used the thermal camera for detection in theAADS as shown in Figures 11 and 12 But in the case ofdetecting plastic drones it will not be effective (e com-petency of small drones is increasing which is alarmingDrones are nowadays integrated with cameras infrareddetectors thermal detectors and many smart sensors andare being used for surveillance and bombing It is difficult tomaintain privacy in the drone-filled age Competitorsthieves or even just neighbors could be spying on everymove using a remote-controlled flying camera All thesekinds of problems can be prevented using the AADS (eAADS is able to detect the smallest drones within its range
0130
0 5 10 15 20 25 30
0135
0140
0145
0150
0155
Figure 7 Loss chart for the Faster-RCNN (e overall loss was 0155
(a)
1400
0 250 500 750 1000 1250 1500 1750 2000
1200
1000
800
600
400
200
0
Drone
(b)
Figure 8 (a) Drone detection using YOLOv3 (b) Drone detection using the Faster-RCNN
6 Security and Communication Networks
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
supporting the objective of either side [2] From the re-search it is also evident that countries are only increasing thenumber of troops sent to other countries for battling con-flicts It shows urgency for Bangladesh to find efficient waysto prevent these conflicts [2] and the importance of anautomated system to handle this situation
(e study is organized as follows Section 2 describes theexisting works related to the AADS Section 3 presentsmethods which include procedures and algorithms fortraining and detection Section 4 describes the result andanalysis and Section 5 presents the conclusion
2 Related Works
At the moment all defense systems have manual controlsover the systems Eventhough many sensors and radars areused for detection now there are fewer implementations ofsystems with cameras locating the targets and automaticallyfiring them by image processing
In [3] thermal cameras and acoustic sensors are used todetect and track drones automatically Sensor fusion hasbeen used to make the system more robust and avoid falsedetection but they did not use any deep learning methods(e study by Unlu et al [4] presents YOLO convolutionalneural network-based autonomous drone surveillance andtracking architecture (ermal images are used to classifydrones into 4 categories (drone bird plane and back-ground) In [5] synthetic radar data and real image data areused to track a moving target Tracking performance isimproved using data fusion and agile edge processing In [6]PTZ (pan tilt zoom) camera and optical and thermalsensors are used to detect boats YOLOv3 is used on theCOCO dataset for detecting boats In [7] YOLOv3 andFaster-RCNN are used to detect power transmission towersAlso this study indicates that Faster-RCNN has better de-tection performance and YOLOv3 has better detectionspeed which can be used in real-time object detection [7] In[8] a dual camera is used to develop a multiple target
zooming system Cameras used for this system are wide-viewcameras and ultrafast mirror drive pan-tilt cameras [8]
In [9] turrets on the tanks can be controlled via eyemovements and blinking Images of the eyes are taken ascontrols so that four people are no longer needed and it iseasier to control the system In [10] camera surveillance isused to look for targets and remote controls are used to targetthe threats Lots of kinematics are used in this system In [11]an automatic detection of the target using a camera at thegunrsquos point is proposed (ey use image processing tech-niques to detect targets from a distance from pictures that thegun points to In [12] a very similar proposal for automat-ically detecting missiles using image processing and targetingaerial threats is proposed(e study by Anwar et al [13] is themost recent study that proposes an automatic targetingsystem for gun turrets using deep learning methods
(e last system that was proposed did not have anyautomatic detection of nearby objects It still needs manuallymoving the camera towards the target for detection Oursystem proposes a radar that detects any nearby movingobjects (e camera will automatically point towards thetarget for detection and verify whether the target is a droneor not
(e authors in [14ndash16] illustrates that secure data replicasin distributed management of identity and authorizationpolicies in smart city applications can be mitigated byblockchain technology In [15] a novel algorithm usingsynergetic neural networks to ensure the robustness andsecurity of digital image watermarking is proposed In [17] aninnovative infrastructure of secure scenario combining In-ternet of (ings (IoT) with cloud computing which operatesin a wireless-mobile 6G network for managing big data onsmart buildings is proposed Authors in [18 19] focus on thesecurity architecture of the Internet of (ings (IoT) Radiofrequency identification (RFID) and wireless sensor network(WSN) can be the enabling factors in IoT development In[20] the multifeature fusion paradigm of images is presentedand helps describe the image pattern more clearly (e study[21] shows that if digital fingerprint image quality degrades toa certain level it decreases the fingerprint recognition ac-curacy Unlike fingerprint recognition accuracy the objectdetection accuracy of YOLOv3 depends on how much areathe object covers in a particular image In [22] four-imageencryption scheme is proposed as an image encryptiontechnique that can protect usersrsquo privacy in online platformssuch as cloud computing or social networks
(is study focuses on building autonomous air defensesystems combining deep learning methods alongside a cheapcamera and microwave sensors (e performance betweenthe Faster-RCNN and YOLOv3 has been considered and thereal-time detection speed is given the most priority Mi-crowave radar sensors are used for the early detection ofdrones
3 Method and Methodology
(e AADS is a system that would provide safety from in-coming aerial threats (eg drones) by locking targets (isdevice would detect and classify incoming aerial intruders by
01950 1960 1970 1980 1990 2000 2010 2018
10
20
30
Num
ber o
f con
flict
s 40
50
Extrasystemic conflict
Interstate conflict
Internal conflict
Int internal conflict
Figure 1 Number of national and international conflicts
2 Security and Communication Networks
image processing lock multiple targets at a time and shootsequentially nearby threats (e area coverage by the AADSwill be 360 degrees(is device will work in a short range (20meters) and can also be used for a particular area orbuildingrsquos safety system
31 Procedure At first a radar system will be integrated bythe radar modules for getting early warnings to the systemand direction (is custom radar system can detect aerialmovement After the detection our camera and gunlaserwill be activated and turned in that direction Only droneswill be classified and detected for this device and will notpoint to innocent birds humans or any natural beings (edevice will check whether the classified object is a drone ornot When this device detects and classifies the drone thetarget will be locked Finally a laser gun will pointfire themoving drones (e operation of the AADS is shown as aflowchart in Figure 2
We used an HB100 X-band microwave sensor and anRCWL-0516 microwave radar sensor module as shown inFigure 3 RCWL-0516 radar module only gave the result ofthe detected object However we needed a radar module todetermine the frequency ofmoving objects FromHB100 wegot the frequency of moving objects
(e pi camera has been used for drone detection andclassification (is camera can be used to take pictures forimage processing and identify whether the object is a droneor not For moving the camera and laser we have used 2servo motors One is used to rotate horizontally and theother is used to rotate vertically(erefore the coverage areaof the AADS will be 360 degrees
32 YOLO (You Only Look Once) Algorithm (e AADSuses the YOLOv3 algorithm for drone detection and clas-sification(e architecture of the YOLOv3 algorithm is shownin Figure 4 For feature extraction we have used Darknet-53It has 53 convolutional layers which is an improved version ofYOLOv2 Darknet-19 1times 1 and 3times 3 convolutional layersare used in YOLOv3 At first it resizes the image then runs aconvolutional neural network (CNN) to an image and at theend the resulting detection is constrained by the confidenceof the model [24] Batch normalization and stride-2 con-volutions are used in YOLOv3 Inputs are normalized bybatch normalization within the deep network [23] In filtersize 3times 32 here ldquo2rdquo is represented by stride-2 It basicallyresizes the input into half For example if the input size is256times 256 then the output size will be 128times128
For bounding box prediction 4 coordinates are used topredict for each bounding box Coordinates for eachbounding boxes are tx ty tw th (e cell in which thebounding boxrsquos center falls is offset from the top left cornerof the image by (cx cy) [23] (e width and height of thebounding box are calculated by k-means which are pw andph bx by bw bh are the actual coordinates of the predictionbounding box which can be determined using the formula
bx σ tx( 1113857 + cx
by σ ty1113872 1113873 + cy
bw pwetw
bh pheth
(1)
33 Faster-RCNN (e Faster-RCNN [25] is a state-of-the-art object detection algorithm that is based on deep neuralnetworks In recent years it is used widely because of itsefficiency taking less time for testing and better perfor-mance For the AADS the Faster-RCNN is also used forreal-time object detection for fast detection of drones (eFaster-RCNN is an improvisation of the Fast-RCNN [26]which had a computational bottleneck in the region proposalnetwork (RPN)(e RPN is the first stage of the RCNN [27]where regions of an object could be found which is alsoknown as regions of interest (ROI) (en features areextracted using different architectures (VGG or ResNet) ofconvolutional neural networks (CNN) (e architectureused in this system for detecting drones is the Faster-RCNNResNet-50 FPN consisting of 50 layers [28 29] Figure 5shows the Faster-RCNN architecture (e ROI pooling layeris the classification process and takes as input the region ofinterests and convolutional features It generates a boundingbox of the objects as well as their class names
Shoot
Rotate camera and laser gun to that direction
Radar scanning
Detection from RADAR
Camera ON
Classify nearest object
Check object= drone
No
No
Yes
Yes (if exists)
Move to nextnearest object
Lock target and point laser gun
Figure 2 Flowchart of the AADS
Security and Communication Networks 3
34 Training and Detection (e dataset collected of dronesconsists of 1359 images from the Kaggle dataset [30] (enthose images were labeled into ldquotxtrdquo format using ldquolabelingrdquofor the YOLOv3 algorithm At first a pretrained coco modelwas fetched for built-in classes (in total 80 classes) (en acustom object detector for drone detection was trained inldquoGoogle Colabrdquo(is custom object detector model was builtfor one class (drone) Also 2000 iterations were completedfor the drone class
4 Result and Analysis
(eAADS was tested on 20 of total image data completelydifferent from the training dataset We achieved a low av-erage loss of 0184961 for our custom object (drone) detectorusing the YOLOv3 algorithm Loss is defined as a badprediction in image processing (e number of losses in-dicates the bad prediction in every image A training modelhas an overfitting problemwhen the loss is zero A high valueof loss also causes errors in prediction (erefore the valueof loss should be close to zero ldquoGoogle Colabrdquo has been used
(a) (b)
Figure 3 Microwave radar sensor module (a) HB100 X-band microwave sensor (b) RCWL-0516 microwave radar sensor module
Filters Size Output
Somax
Type
1times
2times
8times
8times
4times
128 3 times 3Convolutional
256 3 times 3Convolutional
512 3 times 3Convolutional
512 1 times 1Convolutional
256 1 times 1Convolutional
64 1 times 1Convolutional
128 1 times 1Convolutional
128 3 times 32 64 times 64Convolutional
256 3 times 32 32 times 32Convolutional
512 3 times 32 16 times 16Convolutional
1024 3 times 32 8 times 8Convolutional
1024 3 times 3Convolutional
GlobalAvgpool1000Connected
128 times 128Residual
64 times 64Residual
32 times 32Residual
16 times 16Residual
8 times 8Residual
64 3 times 3Convolutional32 1 times 1Convolutional64 3 times 32 128 times 128Convolutional32 3 times 3 256 times 256Convolutional
Figure 4 Architecture of Darknet-53
Region proposal network
Proposals
Classifier
ROI pooling
Feature maps
Conv layers
Image
Figure 5 Faster-RCNN network
4 Security and Communication Networks
to train the model During the training period we generatedthe graph of loss dynamically in ldquoGoogle Colabrdquo (e totalloss chart for the YOLOv3 algorithm is shown in Figure 6Initially the loss was 5 After 2000 completed iterations theloss dropped from 5 to 01 (approximately)
A Faster-RCNN algorithm was also applied to ourdataset to compare the result between YOLOv3 and Faster-RCNN Again the AADS was tested on 20 different imagedata and it achieved a low average loss of 0155 for thecustom object (drone) detector Initially the loss was 0151and the final loss was 0155 (e total loss chart is shown inFigure 7
From Figures 6 and 7 we can see that the Faster-RCNNhas better detection performance than YOLOv3 But forreal-time moving objects YOLOv3 is faster (erefore wechose the model of YOLOv3 for the AADS over the Faster-RCNN(e AADS was able to detect and classify drones andlock the target successfully as shown in Figure 8 (e ro-tation of servos towards the X-axis and Y-axis was alsotested (e AADS was able to move in any direction usingservos and track moving drones towards it (e customdrone detector model was tested using test image data and itcan classify drones successfully in Figure 8
(e two radar modules HB100X and RCWL-0516 detectusing the Doppler radar principle [31 32] Both of them have
different detection distances HB100X can sense 2ndash16 metersand RCWL-0516 can sense 5ndash7 meters [31 32] (ese twomodules were used in parallel to get the absolute movingobjectrsquos data RCWL-0516 sets a Boolean variable TRUE andHB100X measures the distance and velocity of its target ifany object passes through within range (ese values aregenerated by the following Doppler equation
Fd 2VFt
c1113874 1113875Cos θ (2)
where Fd stands for the Doppler frequency V is the velocityof the target Ft stands for the transmitting frequency c is thespeed of light (3times108msec) and θ is the angle between themoving target direction and the axis of the module [33]Transmit frequency (Ft) for HB100 is 10525GHz Wecalculated the speed by using the frequency received fromHB100 (e following equations (equations (3) and (4)) areused to calculate the speed
speedkm
h1113888 1113889
hz
1949 (3)
speedm
h1113874 1113875
hz
3136 (4)
000Current avg loss = 01394 Iteration = 2000 Approx time left = 029 hours
200 400 600 800 1000 1200
Iteration number
1400 1600 1800 2000
In cfg max_batches = 2000
05
10
15
20
25
35
30
40
45Lo
ss
Figure 6 Loss chart for YOLOv3 (e overall loss was 018496
Security and Communication Networks 5
(e radar system is smart enough to work efficiently Itignores the output if the objectrsquos velocity is between 20 and30 mph as it is the average velocity of birds [34]
From RCWL-0516 we got the output that only detectsthe movement For any object moving towards its range(5ndash9m) the radar module can easily detect moving objectsFigure 9 shows the output received from the RCWL-0516microwave radar sensor module
Similarly from the HB100 X-bandmicrowave sensor wegot the detected dronersquos output and the measured Dopplerfrequency Figure 10 shows the output received from theHB100 radar module (2) and (3) are used to calculate thespeed of moving drones
(e purpose of using these radar modules (RCWL-0516and HB100) is to get an early warning of moving aerialthreats In the AADS radar received signals from movingobjects and then the camera and laser gun started theirfunction(e camera was used to classify the object whetherit was a drone or not (e camera and the laser get activatedonly after getting the positive signal from the radar systemSo the AADS does not need to turn the camera and laser onall the time(e radar modules we used were very cheap andrequired less power to run compared to the camera and laser(us the AADS can provide all-time security with less
power which indicates less cost As the camera remained offduring its idle period the life span of the AADS will alsoincrease Table 1 provides the comparison with otherarticles
(e AADS was built with a pan-tilt kit (e laser andcamera were connected on the top of the frame connectedwith a Y-axis rotating servo (horizontal) (e X-axis servowas connected vertically which allowed the upper portion ofthe AADS to move right or left Radar modules wereconnected with Raspberry Pi (e AADS is shown inFigure 9
Some drones are built using electric motors and plasticWe could have used the thermal camera for detection in theAADS as shown in Figures 11 and 12 But in the case ofdetecting plastic drones it will not be effective (e com-petency of small drones is increasing which is alarmingDrones are nowadays integrated with cameras infrareddetectors thermal detectors and many smart sensors andare being used for surveillance and bombing It is difficult tomaintain privacy in the drone-filled age Competitorsthieves or even just neighbors could be spying on everymove using a remote-controlled flying camera All thesekinds of problems can be prevented using the AADS (eAADS is able to detect the smallest drones within its range
0130
0 5 10 15 20 25 30
0135
0140
0145
0150
0155
Figure 7 Loss chart for the Faster-RCNN (e overall loss was 0155
(a)
1400
0 250 500 750 1000 1250 1500 1750 2000
1200
1000
800
600
400
200
0
Drone
(b)
Figure 8 (a) Drone detection using YOLOv3 (b) Drone detection using the Faster-RCNN
6 Security and Communication Networks
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
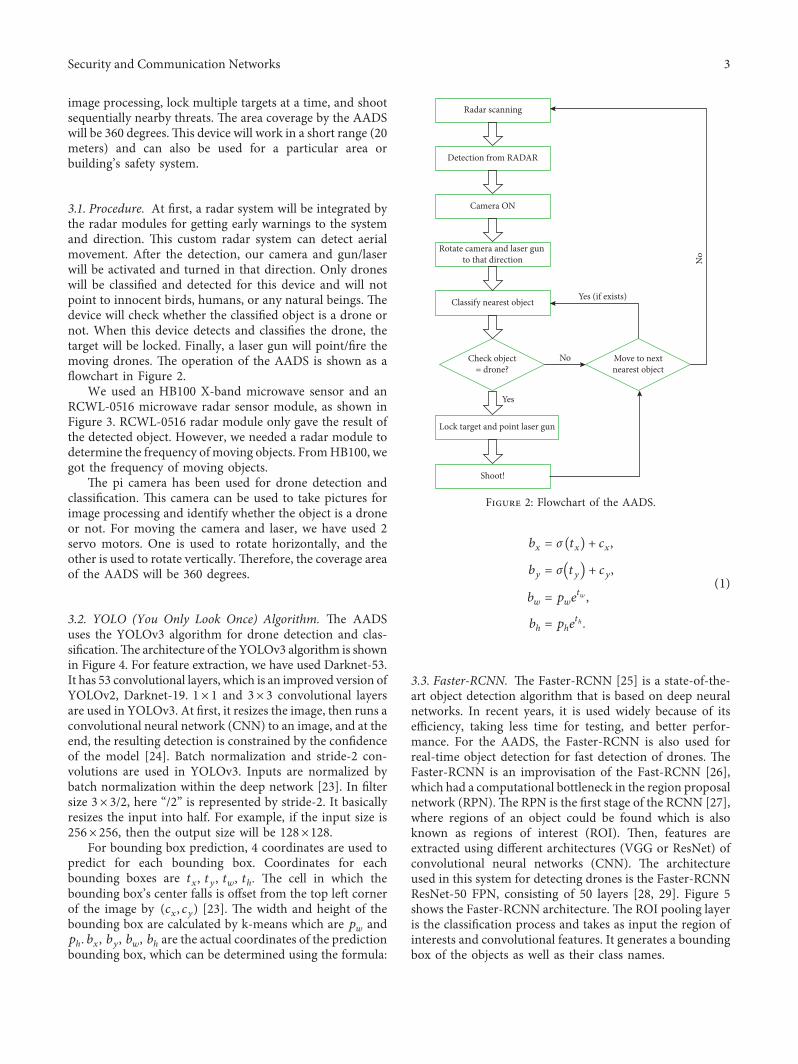
image processing lock multiple targets at a time and shootsequentially nearby threats (e area coverage by the AADSwill be 360 degrees(is device will work in a short range (20meters) and can also be used for a particular area orbuildingrsquos safety system
31 Procedure At first a radar system will be integrated bythe radar modules for getting early warnings to the systemand direction (is custom radar system can detect aerialmovement After the detection our camera and gunlaserwill be activated and turned in that direction Only droneswill be classified and detected for this device and will notpoint to innocent birds humans or any natural beings (edevice will check whether the classified object is a drone ornot When this device detects and classifies the drone thetarget will be locked Finally a laser gun will pointfire themoving drones (e operation of the AADS is shown as aflowchart in Figure 2
We used an HB100 X-band microwave sensor and anRCWL-0516 microwave radar sensor module as shown inFigure 3 RCWL-0516 radar module only gave the result ofthe detected object However we needed a radar module todetermine the frequency ofmoving objects FromHB100 wegot the frequency of moving objects
(e pi camera has been used for drone detection andclassification (is camera can be used to take pictures forimage processing and identify whether the object is a droneor not For moving the camera and laser we have used 2servo motors One is used to rotate horizontally and theother is used to rotate vertically(erefore the coverage areaof the AADS will be 360 degrees
32 YOLO (You Only Look Once) Algorithm (e AADSuses the YOLOv3 algorithm for drone detection and clas-sification(e architecture of the YOLOv3 algorithm is shownin Figure 4 For feature extraction we have used Darknet-53It has 53 convolutional layers which is an improved version ofYOLOv2 Darknet-19 1times 1 and 3times 3 convolutional layersare used in YOLOv3 At first it resizes the image then runs aconvolutional neural network (CNN) to an image and at theend the resulting detection is constrained by the confidenceof the model [24] Batch normalization and stride-2 con-volutions are used in YOLOv3 Inputs are normalized bybatch normalization within the deep network [23] In filtersize 3times 32 here ldquo2rdquo is represented by stride-2 It basicallyresizes the input into half For example if the input size is256times 256 then the output size will be 128times128
For bounding box prediction 4 coordinates are used topredict for each bounding box Coordinates for eachbounding boxes are tx ty tw th (e cell in which thebounding boxrsquos center falls is offset from the top left cornerof the image by (cx cy) [23] (e width and height of thebounding box are calculated by k-means which are pw andph bx by bw bh are the actual coordinates of the predictionbounding box which can be determined using the formula
bx σ tx( 1113857 + cx
by σ ty1113872 1113873 + cy
bw pwetw
bh pheth
(1)
33 Faster-RCNN (e Faster-RCNN [25] is a state-of-the-art object detection algorithm that is based on deep neuralnetworks In recent years it is used widely because of itsefficiency taking less time for testing and better perfor-mance For the AADS the Faster-RCNN is also used forreal-time object detection for fast detection of drones (eFaster-RCNN is an improvisation of the Fast-RCNN [26]which had a computational bottleneck in the region proposalnetwork (RPN)(e RPN is the first stage of the RCNN [27]where regions of an object could be found which is alsoknown as regions of interest (ROI) (en features areextracted using different architectures (VGG or ResNet) ofconvolutional neural networks (CNN) (e architectureused in this system for detecting drones is the Faster-RCNNResNet-50 FPN consisting of 50 layers [28 29] Figure 5shows the Faster-RCNN architecture (e ROI pooling layeris the classification process and takes as input the region ofinterests and convolutional features It generates a boundingbox of the objects as well as their class names
Shoot
Rotate camera and laser gun to that direction
Radar scanning
Detection from RADAR
Camera ON
Classify nearest object
Check object= drone
No
No
Yes
Yes (if exists)
Move to nextnearest object
Lock target and point laser gun
Figure 2 Flowchart of the AADS
Security and Communication Networks 3
34 Training and Detection (e dataset collected of dronesconsists of 1359 images from the Kaggle dataset [30] (enthose images were labeled into ldquotxtrdquo format using ldquolabelingrdquofor the YOLOv3 algorithm At first a pretrained coco modelwas fetched for built-in classes (in total 80 classes) (en acustom object detector for drone detection was trained inldquoGoogle Colabrdquo(is custom object detector model was builtfor one class (drone) Also 2000 iterations were completedfor the drone class
4 Result and Analysis
(eAADS was tested on 20 of total image data completelydifferent from the training dataset We achieved a low av-erage loss of 0184961 for our custom object (drone) detectorusing the YOLOv3 algorithm Loss is defined as a badprediction in image processing (e number of losses in-dicates the bad prediction in every image A training modelhas an overfitting problemwhen the loss is zero A high valueof loss also causes errors in prediction (erefore the valueof loss should be close to zero ldquoGoogle Colabrdquo has been used
(a) (b)
Figure 3 Microwave radar sensor module (a) HB100 X-band microwave sensor (b) RCWL-0516 microwave radar sensor module
Filters Size Output
Somax
Type
1times
2times
8times
8times
4times
128 3 times 3Convolutional
256 3 times 3Convolutional
512 3 times 3Convolutional
512 1 times 1Convolutional
256 1 times 1Convolutional
64 1 times 1Convolutional
128 1 times 1Convolutional
128 3 times 32 64 times 64Convolutional
256 3 times 32 32 times 32Convolutional
512 3 times 32 16 times 16Convolutional
1024 3 times 32 8 times 8Convolutional
1024 3 times 3Convolutional
GlobalAvgpool1000Connected
128 times 128Residual
64 times 64Residual
32 times 32Residual
16 times 16Residual
8 times 8Residual
64 3 times 3Convolutional32 1 times 1Convolutional64 3 times 32 128 times 128Convolutional32 3 times 3 256 times 256Convolutional
Figure 4 Architecture of Darknet-53
Region proposal network
Proposals
Classifier
ROI pooling
Feature maps
Conv layers
Image
Figure 5 Faster-RCNN network
4 Security and Communication Networks
to train the model During the training period we generatedthe graph of loss dynamically in ldquoGoogle Colabrdquo (e totalloss chart for the YOLOv3 algorithm is shown in Figure 6Initially the loss was 5 After 2000 completed iterations theloss dropped from 5 to 01 (approximately)
A Faster-RCNN algorithm was also applied to ourdataset to compare the result between YOLOv3 and Faster-RCNN Again the AADS was tested on 20 different imagedata and it achieved a low average loss of 0155 for thecustom object (drone) detector Initially the loss was 0151and the final loss was 0155 (e total loss chart is shown inFigure 7
From Figures 6 and 7 we can see that the Faster-RCNNhas better detection performance than YOLOv3 But forreal-time moving objects YOLOv3 is faster (erefore wechose the model of YOLOv3 for the AADS over the Faster-RCNN(e AADS was able to detect and classify drones andlock the target successfully as shown in Figure 8 (e ro-tation of servos towards the X-axis and Y-axis was alsotested (e AADS was able to move in any direction usingservos and track moving drones towards it (e customdrone detector model was tested using test image data and itcan classify drones successfully in Figure 8
(e two radar modules HB100X and RCWL-0516 detectusing the Doppler radar principle [31 32] Both of them have
different detection distances HB100X can sense 2ndash16 metersand RCWL-0516 can sense 5ndash7 meters [31 32] (ese twomodules were used in parallel to get the absolute movingobjectrsquos data RCWL-0516 sets a Boolean variable TRUE andHB100X measures the distance and velocity of its target ifany object passes through within range (ese values aregenerated by the following Doppler equation
Fd 2VFt
c1113874 1113875Cos θ (2)
where Fd stands for the Doppler frequency V is the velocityof the target Ft stands for the transmitting frequency c is thespeed of light (3times108msec) and θ is the angle between themoving target direction and the axis of the module [33]Transmit frequency (Ft) for HB100 is 10525GHz Wecalculated the speed by using the frequency received fromHB100 (e following equations (equations (3) and (4)) areused to calculate the speed
speedkm
h1113888 1113889
hz
1949 (3)
speedm
h1113874 1113875
hz
3136 (4)
000Current avg loss = 01394 Iteration = 2000 Approx time left = 029 hours
200 400 600 800 1000 1200
Iteration number
1400 1600 1800 2000
In cfg max_batches = 2000
05
10
15
20
25
35
30
40
45Lo
ss
Figure 6 Loss chart for YOLOv3 (e overall loss was 018496
Security and Communication Networks 5
(e radar system is smart enough to work efficiently Itignores the output if the objectrsquos velocity is between 20 and30 mph as it is the average velocity of birds [34]
From RCWL-0516 we got the output that only detectsthe movement For any object moving towards its range(5ndash9m) the radar module can easily detect moving objectsFigure 9 shows the output received from the RCWL-0516microwave radar sensor module
Similarly from the HB100 X-bandmicrowave sensor wegot the detected dronersquos output and the measured Dopplerfrequency Figure 10 shows the output received from theHB100 radar module (2) and (3) are used to calculate thespeed of moving drones
(e purpose of using these radar modules (RCWL-0516and HB100) is to get an early warning of moving aerialthreats In the AADS radar received signals from movingobjects and then the camera and laser gun started theirfunction(e camera was used to classify the object whetherit was a drone or not (e camera and the laser get activatedonly after getting the positive signal from the radar systemSo the AADS does not need to turn the camera and laser onall the time(e radar modules we used were very cheap andrequired less power to run compared to the camera and laser(us the AADS can provide all-time security with less
power which indicates less cost As the camera remained offduring its idle period the life span of the AADS will alsoincrease Table 1 provides the comparison with otherarticles
(e AADS was built with a pan-tilt kit (e laser andcamera were connected on the top of the frame connectedwith a Y-axis rotating servo (horizontal) (e X-axis servowas connected vertically which allowed the upper portion ofthe AADS to move right or left Radar modules wereconnected with Raspberry Pi (e AADS is shown inFigure 9
Some drones are built using electric motors and plasticWe could have used the thermal camera for detection in theAADS as shown in Figures 11 and 12 But in the case ofdetecting plastic drones it will not be effective (e com-petency of small drones is increasing which is alarmingDrones are nowadays integrated with cameras infrareddetectors thermal detectors and many smart sensors andare being used for surveillance and bombing It is difficult tomaintain privacy in the drone-filled age Competitorsthieves or even just neighbors could be spying on everymove using a remote-controlled flying camera All thesekinds of problems can be prevented using the AADS (eAADS is able to detect the smallest drones within its range
0130
0 5 10 15 20 25 30
0135
0140
0145
0150
0155
Figure 7 Loss chart for the Faster-RCNN (e overall loss was 0155
(a)
1400
0 250 500 750 1000 1250 1500 1750 2000
1200
1000
800
600
400
200
0
Drone
(b)
Figure 8 (a) Drone detection using YOLOv3 (b) Drone detection using the Faster-RCNN
6 Security and Communication Networks
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
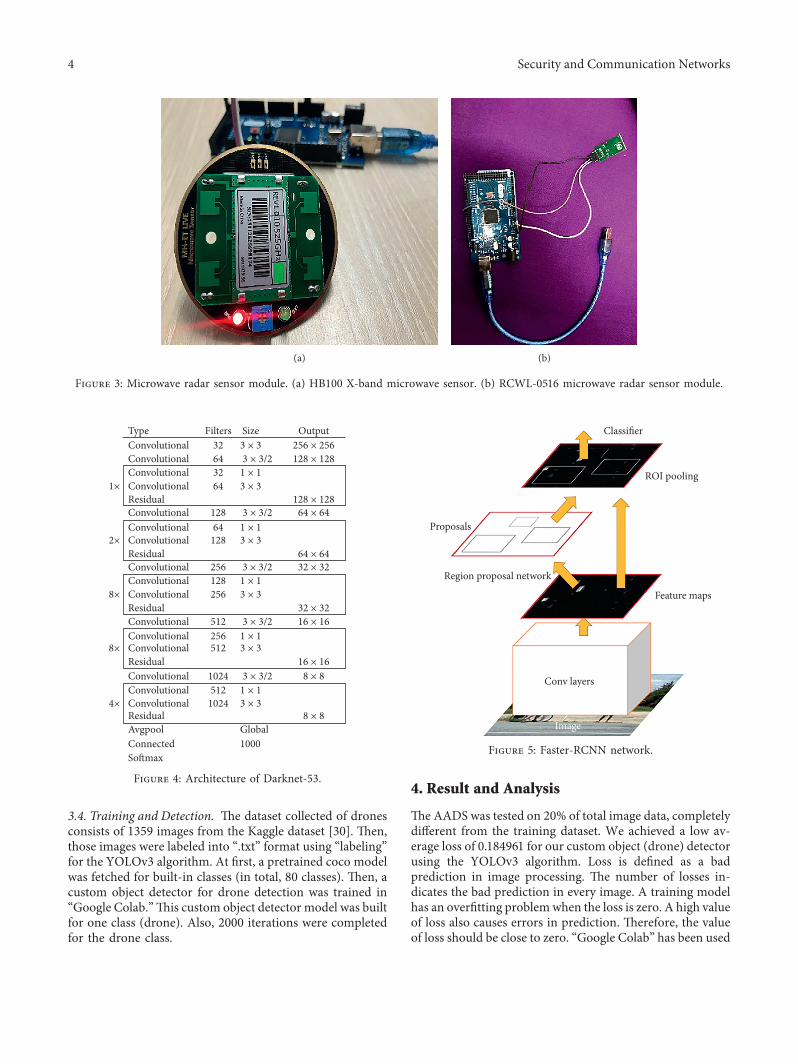
34 Training and Detection (e dataset collected of dronesconsists of 1359 images from the Kaggle dataset [30] (enthose images were labeled into ldquotxtrdquo format using ldquolabelingrdquofor the YOLOv3 algorithm At first a pretrained coco modelwas fetched for built-in classes (in total 80 classes) (en acustom object detector for drone detection was trained inldquoGoogle Colabrdquo(is custom object detector model was builtfor one class (drone) Also 2000 iterations were completedfor the drone class
4 Result and Analysis
(eAADS was tested on 20 of total image data completelydifferent from the training dataset We achieved a low av-erage loss of 0184961 for our custom object (drone) detectorusing the YOLOv3 algorithm Loss is defined as a badprediction in image processing (e number of losses in-dicates the bad prediction in every image A training modelhas an overfitting problemwhen the loss is zero A high valueof loss also causes errors in prediction (erefore the valueof loss should be close to zero ldquoGoogle Colabrdquo has been used
(a) (b)
Figure 3 Microwave radar sensor module (a) HB100 X-band microwave sensor (b) RCWL-0516 microwave radar sensor module
Filters Size Output
Somax
Type
1times
2times
8times
8times
4times
128 3 times 3Convolutional
256 3 times 3Convolutional
512 3 times 3Convolutional
512 1 times 1Convolutional
256 1 times 1Convolutional
64 1 times 1Convolutional
128 1 times 1Convolutional
128 3 times 32 64 times 64Convolutional
256 3 times 32 32 times 32Convolutional
512 3 times 32 16 times 16Convolutional
1024 3 times 32 8 times 8Convolutional
1024 3 times 3Convolutional
GlobalAvgpool1000Connected
128 times 128Residual
64 times 64Residual
32 times 32Residual
16 times 16Residual
8 times 8Residual
64 3 times 3Convolutional32 1 times 1Convolutional64 3 times 32 128 times 128Convolutional32 3 times 3 256 times 256Convolutional
Figure 4 Architecture of Darknet-53
Region proposal network
Proposals
Classifier
ROI pooling
Feature maps
Conv layers
Image
Figure 5 Faster-RCNN network
4 Security and Communication Networks
to train the model During the training period we generatedthe graph of loss dynamically in ldquoGoogle Colabrdquo (e totalloss chart for the YOLOv3 algorithm is shown in Figure 6Initially the loss was 5 After 2000 completed iterations theloss dropped from 5 to 01 (approximately)
A Faster-RCNN algorithm was also applied to ourdataset to compare the result between YOLOv3 and Faster-RCNN Again the AADS was tested on 20 different imagedata and it achieved a low average loss of 0155 for thecustom object (drone) detector Initially the loss was 0151and the final loss was 0155 (e total loss chart is shown inFigure 7
From Figures 6 and 7 we can see that the Faster-RCNNhas better detection performance than YOLOv3 But forreal-time moving objects YOLOv3 is faster (erefore wechose the model of YOLOv3 for the AADS over the Faster-RCNN(e AADS was able to detect and classify drones andlock the target successfully as shown in Figure 8 (e ro-tation of servos towards the X-axis and Y-axis was alsotested (e AADS was able to move in any direction usingservos and track moving drones towards it (e customdrone detector model was tested using test image data and itcan classify drones successfully in Figure 8
(e two radar modules HB100X and RCWL-0516 detectusing the Doppler radar principle [31 32] Both of them have
different detection distances HB100X can sense 2ndash16 metersand RCWL-0516 can sense 5ndash7 meters [31 32] (ese twomodules were used in parallel to get the absolute movingobjectrsquos data RCWL-0516 sets a Boolean variable TRUE andHB100X measures the distance and velocity of its target ifany object passes through within range (ese values aregenerated by the following Doppler equation
Fd 2VFt
c1113874 1113875Cos θ (2)
where Fd stands for the Doppler frequency V is the velocityof the target Ft stands for the transmitting frequency c is thespeed of light (3times108msec) and θ is the angle between themoving target direction and the axis of the module [33]Transmit frequency (Ft) for HB100 is 10525GHz Wecalculated the speed by using the frequency received fromHB100 (e following equations (equations (3) and (4)) areused to calculate the speed
speedkm
h1113888 1113889
hz
1949 (3)
speedm
h1113874 1113875
hz
3136 (4)
000Current avg loss = 01394 Iteration = 2000 Approx time left = 029 hours
200 400 600 800 1000 1200
Iteration number
1400 1600 1800 2000
In cfg max_batches = 2000
05
10
15
20
25
35
30
40
45Lo
ss
Figure 6 Loss chart for YOLOv3 (e overall loss was 018496
Security and Communication Networks 5
(e radar system is smart enough to work efficiently Itignores the output if the objectrsquos velocity is between 20 and30 mph as it is the average velocity of birds [34]
From RCWL-0516 we got the output that only detectsthe movement For any object moving towards its range(5ndash9m) the radar module can easily detect moving objectsFigure 9 shows the output received from the RCWL-0516microwave radar sensor module
Similarly from the HB100 X-bandmicrowave sensor wegot the detected dronersquos output and the measured Dopplerfrequency Figure 10 shows the output received from theHB100 radar module (2) and (3) are used to calculate thespeed of moving drones
(e purpose of using these radar modules (RCWL-0516and HB100) is to get an early warning of moving aerialthreats In the AADS radar received signals from movingobjects and then the camera and laser gun started theirfunction(e camera was used to classify the object whetherit was a drone or not (e camera and the laser get activatedonly after getting the positive signal from the radar systemSo the AADS does not need to turn the camera and laser onall the time(e radar modules we used were very cheap andrequired less power to run compared to the camera and laser(us the AADS can provide all-time security with less
power which indicates less cost As the camera remained offduring its idle period the life span of the AADS will alsoincrease Table 1 provides the comparison with otherarticles
(e AADS was built with a pan-tilt kit (e laser andcamera were connected on the top of the frame connectedwith a Y-axis rotating servo (horizontal) (e X-axis servowas connected vertically which allowed the upper portion ofthe AADS to move right or left Radar modules wereconnected with Raspberry Pi (e AADS is shown inFigure 9
Some drones are built using electric motors and plasticWe could have used the thermal camera for detection in theAADS as shown in Figures 11 and 12 But in the case ofdetecting plastic drones it will not be effective (e com-petency of small drones is increasing which is alarmingDrones are nowadays integrated with cameras infrareddetectors thermal detectors and many smart sensors andare being used for surveillance and bombing It is difficult tomaintain privacy in the drone-filled age Competitorsthieves or even just neighbors could be spying on everymove using a remote-controlled flying camera All thesekinds of problems can be prevented using the AADS (eAADS is able to detect the smallest drones within its range
0130
0 5 10 15 20 25 30
0135
0140
0145
0150
0155
Figure 7 Loss chart for the Faster-RCNN (e overall loss was 0155
(a)
1400
0 250 500 750 1000 1250 1500 1750 2000
1200
1000
800
600
400
200
0
Drone
(b)
Figure 8 (a) Drone detection using YOLOv3 (b) Drone detection using the Faster-RCNN
6 Security and Communication Networks
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
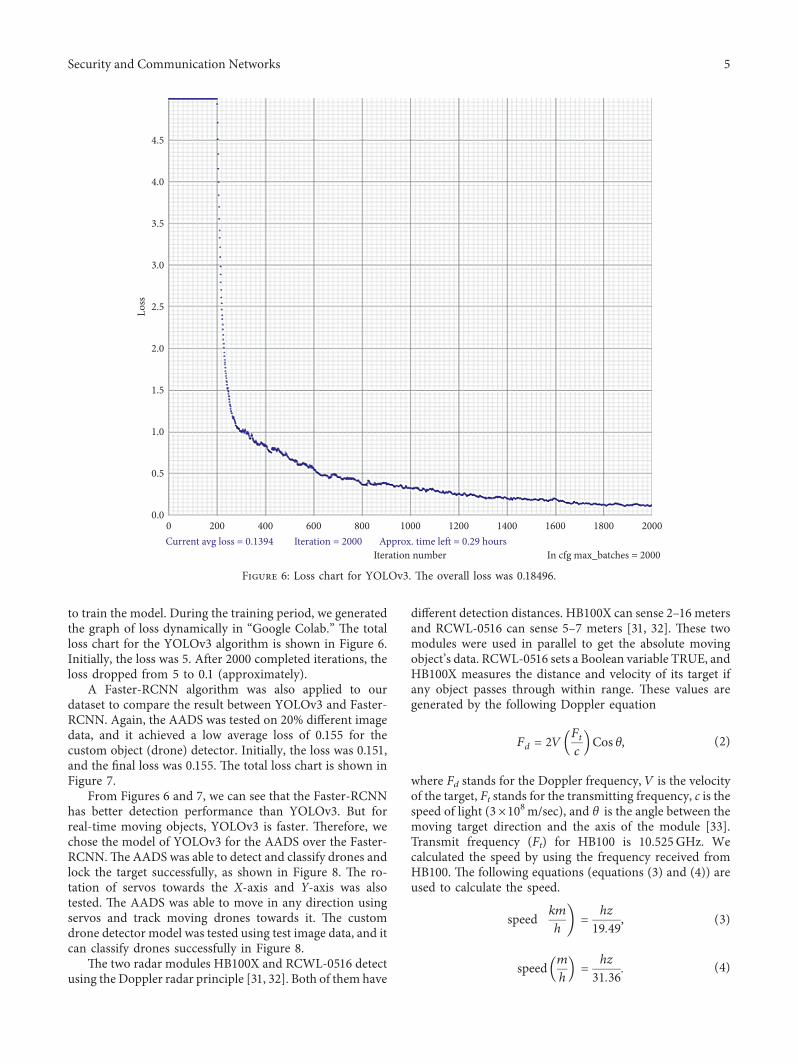
to train the model During the training period we generatedthe graph of loss dynamically in ldquoGoogle Colabrdquo (e totalloss chart for the YOLOv3 algorithm is shown in Figure 6Initially the loss was 5 After 2000 completed iterations theloss dropped from 5 to 01 (approximately)
A Faster-RCNN algorithm was also applied to ourdataset to compare the result between YOLOv3 and Faster-RCNN Again the AADS was tested on 20 different imagedata and it achieved a low average loss of 0155 for thecustom object (drone) detector Initially the loss was 0151and the final loss was 0155 (e total loss chart is shown inFigure 7
From Figures 6 and 7 we can see that the Faster-RCNNhas better detection performance than YOLOv3 But forreal-time moving objects YOLOv3 is faster (erefore wechose the model of YOLOv3 for the AADS over the Faster-RCNN(e AADS was able to detect and classify drones andlock the target successfully as shown in Figure 8 (e ro-tation of servos towards the X-axis and Y-axis was alsotested (e AADS was able to move in any direction usingservos and track moving drones towards it (e customdrone detector model was tested using test image data and itcan classify drones successfully in Figure 8
(e two radar modules HB100X and RCWL-0516 detectusing the Doppler radar principle [31 32] Both of them have
different detection distances HB100X can sense 2ndash16 metersand RCWL-0516 can sense 5ndash7 meters [31 32] (ese twomodules were used in parallel to get the absolute movingobjectrsquos data RCWL-0516 sets a Boolean variable TRUE andHB100X measures the distance and velocity of its target ifany object passes through within range (ese values aregenerated by the following Doppler equation
Fd 2VFt
c1113874 1113875Cos θ (2)
where Fd stands for the Doppler frequency V is the velocityof the target Ft stands for the transmitting frequency c is thespeed of light (3times108msec) and θ is the angle between themoving target direction and the axis of the module [33]Transmit frequency (Ft) for HB100 is 10525GHz Wecalculated the speed by using the frequency received fromHB100 (e following equations (equations (3) and (4)) areused to calculate the speed
speedkm
h1113888 1113889
hz
1949 (3)
speedm
h1113874 1113875
hz
3136 (4)
000Current avg loss = 01394 Iteration = 2000 Approx time left = 029 hours
200 400 600 800 1000 1200
Iteration number
1400 1600 1800 2000
In cfg max_batches = 2000
05
10
15
20
25
35
30
40
45Lo
ss
Figure 6 Loss chart for YOLOv3 (e overall loss was 018496
Security and Communication Networks 5
(e radar system is smart enough to work efficiently Itignores the output if the objectrsquos velocity is between 20 and30 mph as it is the average velocity of birds [34]
From RCWL-0516 we got the output that only detectsthe movement For any object moving towards its range(5ndash9m) the radar module can easily detect moving objectsFigure 9 shows the output received from the RCWL-0516microwave radar sensor module
Similarly from the HB100 X-bandmicrowave sensor wegot the detected dronersquos output and the measured Dopplerfrequency Figure 10 shows the output received from theHB100 radar module (2) and (3) are used to calculate thespeed of moving drones
(e purpose of using these radar modules (RCWL-0516and HB100) is to get an early warning of moving aerialthreats In the AADS radar received signals from movingobjects and then the camera and laser gun started theirfunction(e camera was used to classify the object whetherit was a drone or not (e camera and the laser get activatedonly after getting the positive signal from the radar systemSo the AADS does not need to turn the camera and laser onall the time(e radar modules we used were very cheap andrequired less power to run compared to the camera and laser(us the AADS can provide all-time security with less
power which indicates less cost As the camera remained offduring its idle period the life span of the AADS will alsoincrease Table 1 provides the comparison with otherarticles
(e AADS was built with a pan-tilt kit (e laser andcamera were connected on the top of the frame connectedwith a Y-axis rotating servo (horizontal) (e X-axis servowas connected vertically which allowed the upper portion ofthe AADS to move right or left Radar modules wereconnected with Raspberry Pi (e AADS is shown inFigure 9
Some drones are built using electric motors and plasticWe could have used the thermal camera for detection in theAADS as shown in Figures 11 and 12 But in the case ofdetecting plastic drones it will not be effective (e com-petency of small drones is increasing which is alarmingDrones are nowadays integrated with cameras infrareddetectors thermal detectors and many smart sensors andare being used for surveillance and bombing It is difficult tomaintain privacy in the drone-filled age Competitorsthieves or even just neighbors could be spying on everymove using a remote-controlled flying camera All thesekinds of problems can be prevented using the AADS (eAADS is able to detect the smallest drones within its range
0130
0 5 10 15 20 25 30
0135
0140
0145
0150
0155
Figure 7 Loss chart for the Faster-RCNN (e overall loss was 0155
(a)
1400
0 250 500 750 1000 1250 1500 1750 2000
1200
1000
800
600
400
200
0
Drone
(b)
Figure 8 (a) Drone detection using YOLOv3 (b) Drone detection using the Faster-RCNN
6 Security and Communication Networks
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
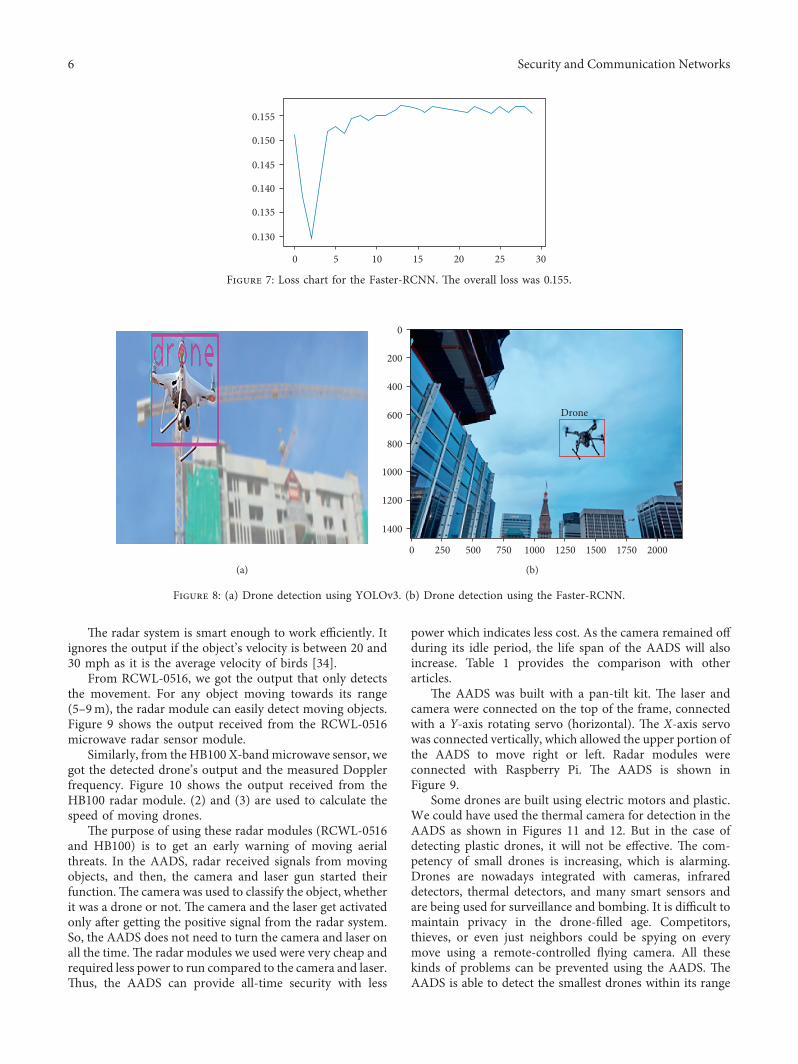
(e radar system is smart enough to work efficiently Itignores the output if the objectrsquos velocity is between 20 and30 mph as it is the average velocity of birds [34]
From RCWL-0516 we got the output that only detectsthe movement For any object moving towards its range(5ndash9m) the radar module can easily detect moving objectsFigure 9 shows the output received from the RCWL-0516microwave radar sensor module
Similarly from the HB100 X-bandmicrowave sensor wegot the detected dronersquos output and the measured Dopplerfrequency Figure 10 shows the output received from theHB100 radar module (2) and (3) are used to calculate thespeed of moving drones
(e purpose of using these radar modules (RCWL-0516and HB100) is to get an early warning of moving aerialthreats In the AADS radar received signals from movingobjects and then the camera and laser gun started theirfunction(e camera was used to classify the object whetherit was a drone or not (e camera and the laser get activatedonly after getting the positive signal from the radar systemSo the AADS does not need to turn the camera and laser onall the time(e radar modules we used were very cheap andrequired less power to run compared to the camera and laser(us the AADS can provide all-time security with less
power which indicates less cost As the camera remained offduring its idle period the life span of the AADS will alsoincrease Table 1 provides the comparison with otherarticles
(e AADS was built with a pan-tilt kit (e laser andcamera were connected on the top of the frame connectedwith a Y-axis rotating servo (horizontal) (e X-axis servowas connected vertically which allowed the upper portion ofthe AADS to move right or left Radar modules wereconnected with Raspberry Pi (e AADS is shown inFigure 9
Some drones are built using electric motors and plasticWe could have used the thermal camera for detection in theAADS as shown in Figures 11 and 12 But in the case ofdetecting plastic drones it will not be effective (e com-petency of small drones is increasing which is alarmingDrones are nowadays integrated with cameras infrareddetectors thermal detectors and many smart sensors andare being used for surveillance and bombing It is difficult tomaintain privacy in the drone-filled age Competitorsthieves or even just neighbors could be spying on everymove using a remote-controlled flying camera All thesekinds of problems can be prevented using the AADS (eAADS is able to detect the smallest drones within its range
0130
0 5 10 15 20 25 30
0135
0140
0145
0150
0155
Figure 7 Loss chart for the Faster-RCNN (e overall loss was 0155
(a)
1400
0 250 500 750 1000 1250 1500 1750 2000
1200
1000
800
600
400
200
0
Drone
(b)
Figure 8 (a) Drone detection using YOLOv3 (b) Drone detection using the Faster-RCNN
6 Security and Communication Networks
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
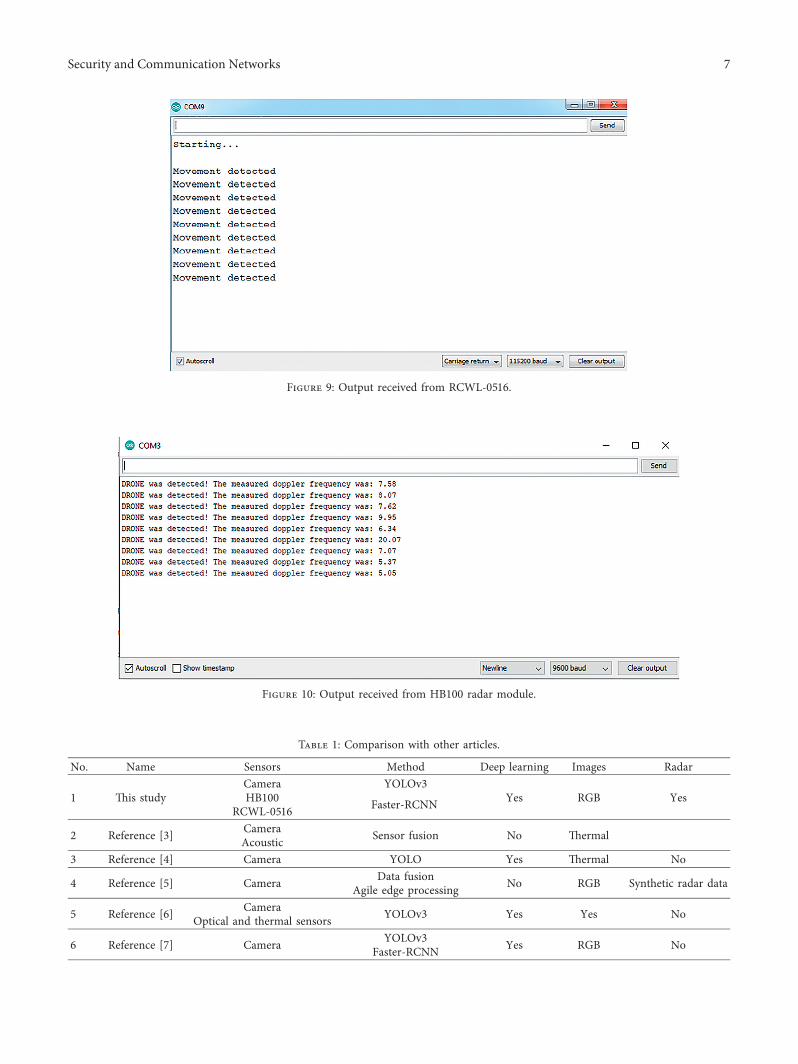
Figure 9 Output received from RCWL-0516
Figure 10 Output received from HB100 radar module
Table 1 Comparison with other articles
No Name Sensors Method Deep learning Images Radar
1 (is studyCamera YOLOv3
Yes RGB YesHB100 Faster-RCNNRCWL-0516
2 Reference [3] Camera Sensor fusion No (ermalAcoustic3 Reference [4] Camera YOLO Yes (ermal No
4 Reference [5] Camera Data fusion No RGB Synthetic radar dataAgile edge processing
5 Reference [6] Camera YOLOv3 Yes Yes NoOptical and thermal sensors
6 Reference [7] Camera YOLOv3 Yes RGB NoFaster-RCNN
Security and Communication Networks 7
and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks

and can be used as a strong defensive unit against sur-veillance drones (ese drones are coated with plastic andstealthy materials which are difficult to detect for traditionalradio wave radars But that would not work if a drone isprogrammed to fly without radio uplinks and downlinksSince we used microwave Doppler radar detecting amovable object is our first task and the camera is to de-termine whether it is a drone or not afterward However theold-fashioned Doppler radar is more effective against these
stealth drones (erefore all kinds of mini drones plasticdrones and drones coated with other elements (eg artificialleather) can be detected easily using this system
5 Conclusion
(e AADS is a modern technology that is very much neededin Bangladesh because of several efficiency and trainingproblems Recently Bangladesh army tested their newlyimported Swiss air defense system named Oerlikon TwinGun GDF009 [35] (is defense system is similar to theAADS prototype from some standpoints such as hardwaredesign and the electronic components used are costly and aswell as not fully automated because four persons are neededto operate this system (e cost of the AADS is only around25000 BDT (e cost is very low compared to the existingsystem such as Oerlikon Twin Gun because of the availabilityof parts and cheap Doppler modules
However to recover these problems and gain efficiencythe AADS prototype was developed to compete with globaldefense industries To ensure national security secure re-stricted areas from invasion our AADS can be deployed Ifwe think economically this system can save military ex-penses and be exported to earn substantial foreign currency(is system is also quite versatile as it can be deployed indifferent weapons such as frigates tanks and towers Also itcan be used to predict the position of moving objects such asdrones and planes However the most important fact aboutthe AADS prototype is that it was developed with the currentcenturyrsquos latest technologies We used the YOLOv3 algo-rithm for detecting the target which is considered one of thefastest detection algorithms and it proved its efficiencycompared to the Faster-RCNN for detecting real-timemoving objects (e AADS is smarter than all other tradi-tional air defense guns because of its autonomic activitiesportability and accuracy We made this prototype versionbecause of our low budget and we hope to develop theoriginal AADS with more innovative features in the future
Data Availability
(e data used to support the findings of this study are freelyavailable at httpswwwkagglecomdasmehdixtrdrone-dataset-uav
Conflicts of Interest
(e authors declare that they have no conflicts of interest
Acknowledgments
(e authors would like to thank for the support from TaifUniversity Taif Saudi Arabia Taif University ResearchersSupporting Project number (TURSP-202073)
Pi camera
Laser
Servo for rotatingY-axis
Servo for rotatingX-axis
Figure 11 AADS (autonomous air defense system)
Figure 12 Main prototype of the AADS (autonomous air defensesystem)
8 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks
References
[1] R G Vickers ldquoGun turretsrdquo 1967 httpspatentimagesstoragegoogleapiscomb97cf943f8b6588314d4US3348451pdf In United States Patent Office [Online]Available
[2] R Strand and N Urdal ldquoTrends in armed conflict1946ndash2018rdquo in Conflict Trends 3-2019PRIO Oslo Norway2019 httpswwwprioorgutilityDownloadFileashxid=1858amptype=publicationfile [Online] Available
[3] F Svanstrom C Englund and F Alonso-Fernandez ldquoReal-time drone detection and tracking with visible thermal andacoustic sensorsrdquo in Proceedings of the International Con-ference on Pattern Recognition (ICPR) Milan Italy January2021
[4] E Unlu E Zenou N Riviere and P E Dupouy ldquoAn au-tonomous drone surveillance and tracking architecturerdquo IPSJTransactions on Computer Vision and Applications vol 11pp 1ndash13 2019
[5] P Tsiantis S A Purryag and I Kyriakides ldquoTarget trackingusing radar and image IoT nodesrdquo in Proceedings of the 16thIEEE International Conference on Distributed Computing inSensor Systems (DCOSS) pp 418ndash422 Marina del Rey CAUSA May 2020
[6] C P Simonsen F M (iesson Oslash Holtskog and R GadeldquoDetecting and locating boats using a PTZ camera with bothoptical and thermal sensorsrdquo in Proceedings of the 15th In-ternational Joint Conference on Computer Vision Imaging andComputer Graphics cs lteory and Appplications VISIGRAPPpp 395ndash403 Valletta Malta February 2020
[7] H Wang G Yang E Li Y Tian M Zhao and Z LiangldquoHigh-voltage power transmission tower detection based onfaster R-CNN and YOLO-V3rdquo in Proceedings of the 2019Chinese Control Conference (CCC) pp 8750ndash8755 Guangz-hou China July 2019
[8] S K Sivanath S A Muralikrishnan P (othadri andV Raja ldquoEyeball and blink-controlled firing system formilitary tank using labviewrdquo in Proceeding of the 2012 4thInternationalConference on Intelligent Human Computer In-teraction (IHCI) pp 1ndash4 IEEE Kharagpur India Decenber2012
[9] S Hu K Shimasaki M Jiang T Takaki and I Ishii ldquoA dual-camera-based ultrafast tracking system for simultaneousmulti-target zoomingrdquo in Proceedings of the IEEE Interna-tional Conference on Robotics and Biomimetics (ROBIO)pp 521ndash526 Dali China December 2019
[10] R Bisewski and P K Atrey ldquoToward a remote-controlledweapon equipped camera surveillance systemrdquo in Proceedingsof the Tools with Artificial Intelligence (ICTAI) 2011 23rd IEEEInternational Conference on pp 1087ndash1092 IEEE BocaRaton FL USA November 2011
[11] E Iflachah D Purnomo and I A Sulistijono ldquoCoil gun turretcontrol using a camerardquo EEPIS Final Project 2011
[12] A Garg and R Raziur Rouf K N Hafiz M Sharna andN Hasan Automated detection locking and hitting a fastmoving aerial object by image processing (suitable for guidedmissile)rdquo IOSR Journal of Electronics and CommunicationEngineering vol 11 no 4 pp 60ndash68 2016
[13] M K Anwar A Risnumawan A Darmawan M N Tamaraand D S Purnomo ldquoDeep multilayer network for automatictargeting system of gun turretrdquo in Proceedings of the 2017International Electronics Symposium on Engineering Tech-nology and Applications (IES-ETA) pp 134ndash139 SurabayaIndonesia September 2017
[14] P Singh M Masud M S Hossain and A Kaur ldquoBlockchainand homomorphic encryption-based privacy-preserving dataaggregation model in smart gridrdquo Computers amp ElectricalEngineering vol 93 2021
[15] D Li L Deng B B Gupta H Wang and C Chang ldquoA novelCNN based security guaranteed image watermarking gen-eration scenario for smart city applicationsrdquo InformationSciences vol 479 pp 432ndash447 2018
[16] P Singh M Masud M Shamim Hossain et al ldquoCross-do-main secure data sharing using blockchain for industrial IoTrdquoJournal of Parallel and Distributed Computing 2021 In press
[17] C L Stergiou K E Psannis and B B Gupta ldquoIoT-based bigdata secure management in the fog over a 6G wireless net-workrdquo IEEE Internet of ltings Journal vol 8 no 7pp 5164ndash5171 2021
[18] M Masud G S Gaba K Choudhary M S HossainM F Alhamid and G Muhammad ldquoLightweight and ano-nymity-preserving user authentication scheme for IoT-basedhealthcarerdquo IEEE Internet of ltings Journal 2021 inpress
[19] M Masud G S Gaba S Alqahtani et al ldquoA lightweight androbust secure key establishment protocol for Internet ofmedical things in COVID-19 patients carerdquo IEEE Internet ofltings Journal vol 99 2020
[20] H Wang Z Li L Yang B B Gupta and C Chang ldquoVisualsaliency guided complex image retrievalrdquo Pattern RecognitionLetters vol 130 pp 64ndash72 2020
[21] M A Alsmirat F Al-Alem M Al-Ayyoub Y Jararweh andB Gupta ldquoImpact of digital fingerprint image quality on thefingerprint recognition accuracyrdquo Multimedia Tools andApplications vol 78 no 3 pp 3649ndash3688 2019
[22] S Ibrahim H Alhumyani M Masud et al ldquoFramework forefficient medical image encryption using dynamic S-boxesand chaotic mapsrdquo IEEE Access vol 8 Article ID 1604332020
[23] A Farhadi and R Joseph ldquoYolov3 an incremental im-provementrdquo in Proceedings of the Computer Vision andPattern Recognition Salt Lake UT USA June 2018
[24] J Redmon S Divvala R Girshick and A Farhadi ldquoYou onlylook once unifiedreal-time object detectionrdquo in Proceedingsof the IEEE Conference on Computer Vision and PatternRecognition (CVPR) pp 779ndash788 Las Vegas NV USA June2016
[25] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo InIEEE Transactions on Pattern Analysis and Machine Intelli-gence vol 39 no 6 pp 1137ndash1149 2017
[26] R Girshick ldquoFast R-CNNrdquo in Proceedings of the 2015 IEEEInternational Conference on Computer Vision (ICCV)pp 1440ndash1448 Santiago Chile December 2015
[27] R Girshick J Donahue T Darrell and J Malik ldquoRegion-based convolutional networks for accurate object detectionand segmentationrdquo In IEEE Transactions on Pattern Analysisand Machine Intelligence vol 38 no 1 pp 142ndash158 2016
[28] S Ren K He R Girshick and J Sun ldquoFaster R-CNNTowardsreal-time object detection with region proposal networksrdquo inProceedings of the Neural Information Proceesing Systemvol 1 pp 91ndash99 Montreal Canada December 2015
[29] K He X Zhang S Ren and J Sun ldquoDeep residual learningfor image recognitionrdquo in Proceedings of the 2016 IEEEConference on Computer Vision and Pattern Recognitionpp 770ndash778 Las Vegas NV USA June 2016
[30] httpswwwkagglecomdasmehdixtrdrone-dataset-uavKaggle dataset [Online]
Security and Communication Networks 9
[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks

[31] Spark Fruit Electronics ldquoHB100 X 10525GHZ microwavesensor 2-16M Doppler radar human body induction switchmodule for arduinordquo 2020 httpssparkfruitphproductmh-et-live-hb100-x-10-525ghz-microwave-sensor [online]Available
[32] T K Hareendran ldquoHow to get started with a microwave radarmotion sensorrdquo [Online] Availablehttpswwwelectroschematicscomget-started-microwave-radar-motion-sensor 2017
[33] httpswwwlimpkinfrpublicHB100HB100_Microwave_Sensor_Application_Notepdf AgilSense 2020 [Online]Available
[34] E Moore and C Ryan ldquoHow fast do birds fly httpswwwjaysbirdbarncomfast-birds-fly [Online] Available
[35] Newsroom ldquoSkyguard anti-aircraft gun to boost bangladesharmyrsquos air defense capabilityrdquo in Bangladesh ArmyDhakaBangladesh[Online] Available httpsbdnewsnetcombangladeshbdmilitaryskyguard-anti-aircraft-gun-to-boost-bangladesh-armys-air-defense-capability 2019
10 Security and Communication Networks

























![From Vision to Actions - Towards Adaptive & Autonomous Humanoid Robots [PhD Defense]](https://img.pdfslide.net/doc/110x75/547e7784b4af9fb9158b56ca/from-vision-to-actions-towards-adaptive-autonomous-humanoid-robots-phd-defense.jpg)


