Embed Size (px)
Citation preview

Boeing Defense, Space & SecurityPhantomWorks
Autonomous Systems: The Future in Aerospace
Kevin A. Wise, Ph.D.Senior Technical Fellow, The Boeing Company
NAE-AAES Convocation24 April 2017

BDS | PhantomWorks
A Disruptive Surge in Autonomy
• Automotive industry moving quickly• Predictions for 90% of Autos to be
autonomous by 2030• Reliable low cost sensor
development• Collaborative Autonomy
• New companies building autonomous aircraft at record pace
• Strong competition to be first to bring internet to new markets
• Ground/air package delivery
Autonomous Systems| 2
BDS | PhantomWorks
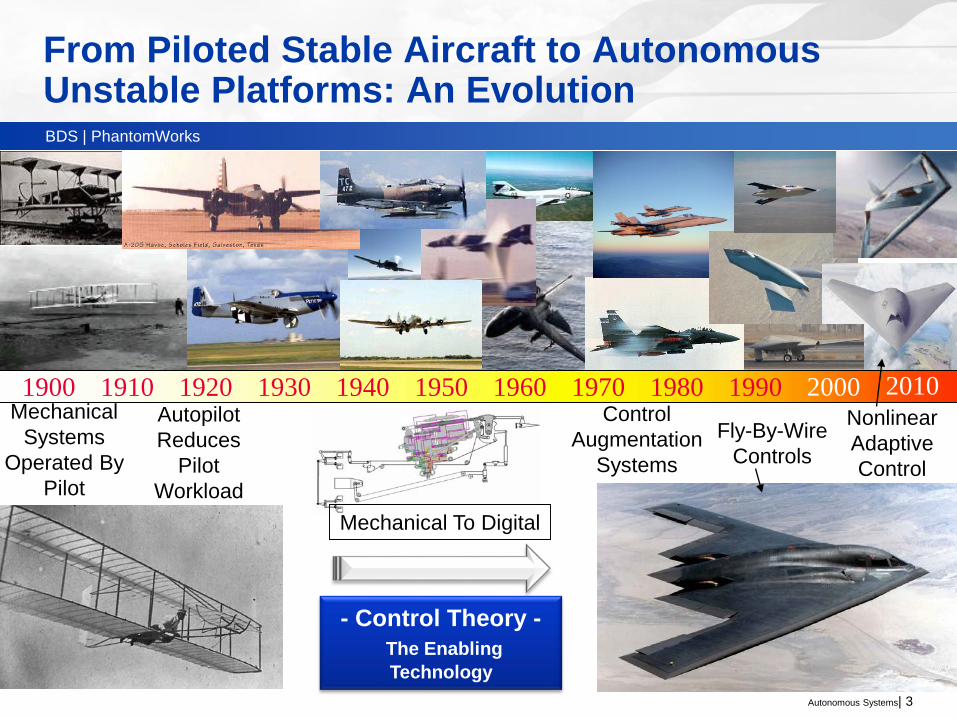
From Piloted Stable Aircraft to Autonomous Unstable Platforms: An Evolution
NonlinearAdaptiveControl
Mechanical Systems
Operated By Pilot
Autopilot Reduces
Pilot Workload
Fly-By-WireControls
Control Augmentation
Systems
1900 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010
Autonomous Systems| 3
Mechanical To Digital
- Control Theory -The Enabling Technology
BDS | PhantomWorks
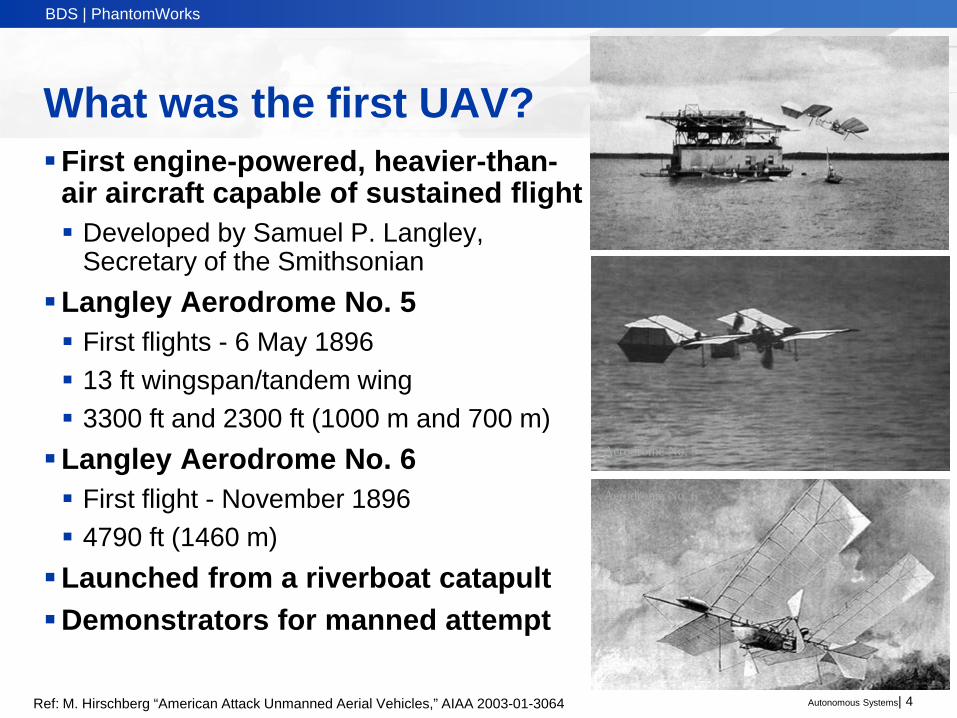
What was the first UAV?First engine-powered, heavier-than-
air aircraft capable of sustained flight Developed by Samuel P. Langley,
Secretary of the SmithsonianLangley Aerodrome No. 5 First flights - 6 May 1896 13 ft wingspan/tandem wing 3300 ft and 2300 ft (1000 m and 700 m)Langley Aerodrome No. 6 First flight - November 1896 4790 ft (1460 m) Launched from a riverboat catapultDemonstrators for manned attempt
Aerodrome No. 5
Aerodrome No. 6
Autonomous Systems| 4Ref: M. Hirschberg “American Attack Unmanned Aerial Vehicles,” AIAA 2003-01-3064
BDS | PhantomWorks
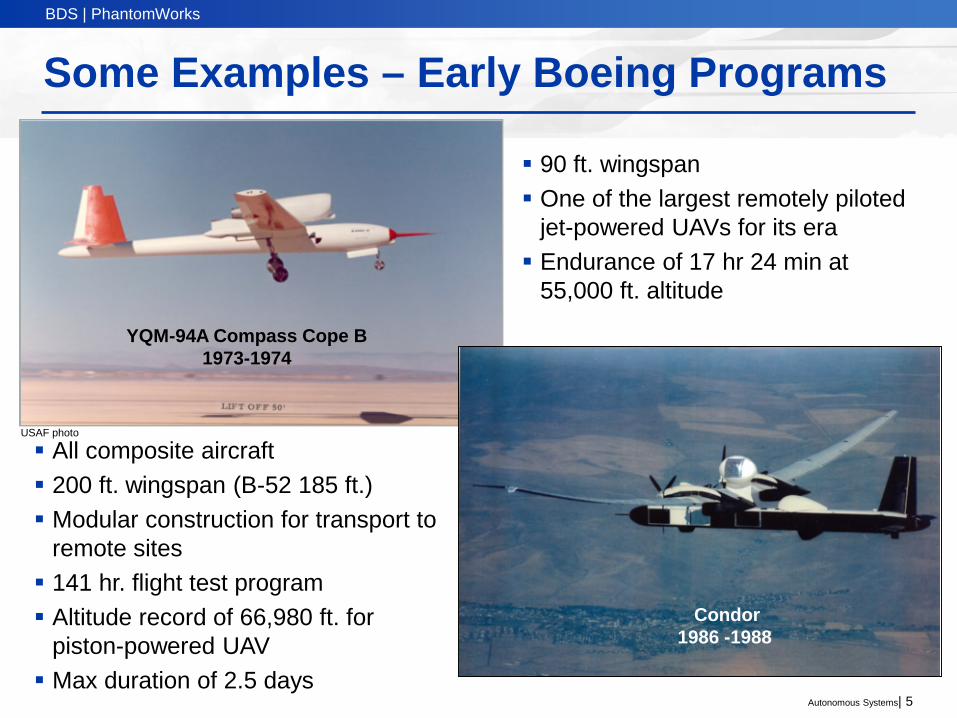
Some Examples – Early Boeing Programs
YQM-94A Compass Cope B1973-1974
Condor1986 -1988
90 ft. wingspan One of the largest remotely piloted
jet-powered UAVs for its era Endurance of 17 hr 24 min at
55,000 ft. altitude
All composite aircraft 200 ft. wingspan (B-52 185 ft.) Modular construction for transport to
remote sites 141 hr. flight test program Altitude record of 66,980 ft. for
piston-powered UAV Max duration of 2.5 days
USAF photo
Autonomous Systems| 5
BDS | PhantomWorks
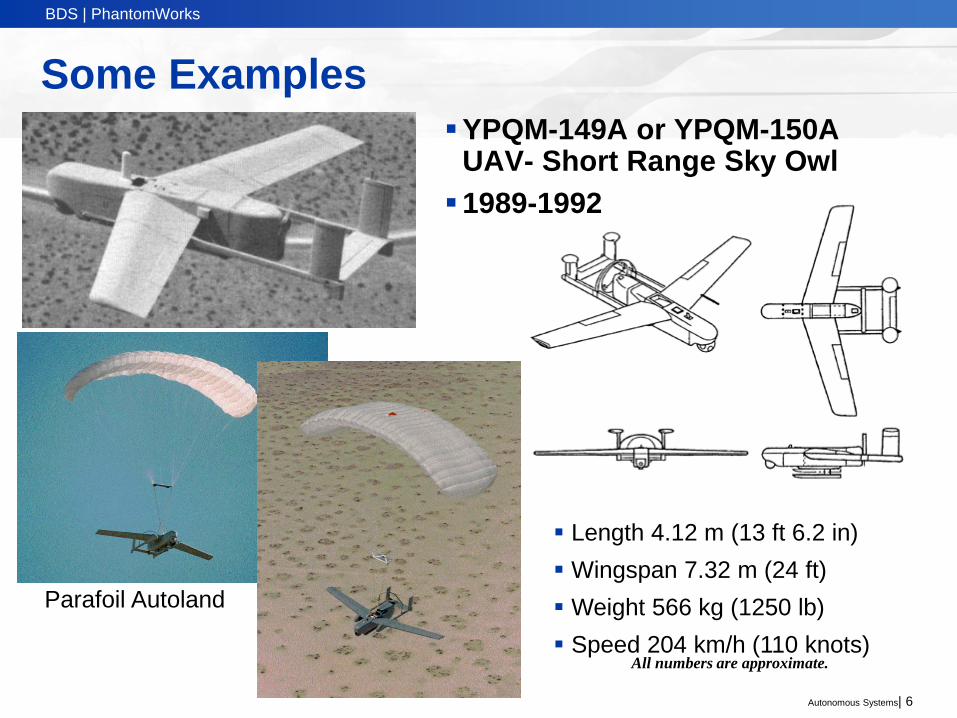
Some ExamplesYPQM-149A or YPQM-150A
UAV- Short Range Sky Owl1989-1992
Length 4.12 m (13 ft 6.2 in) Wingspan 7.32 m (24 ft) Weight 566 kg (1250 lb) Speed 204 km/h (110 knots)
Parafoil Autoland
All numbers are approximate.
Autonomous Systems| 6
BDS | PhantomWorks
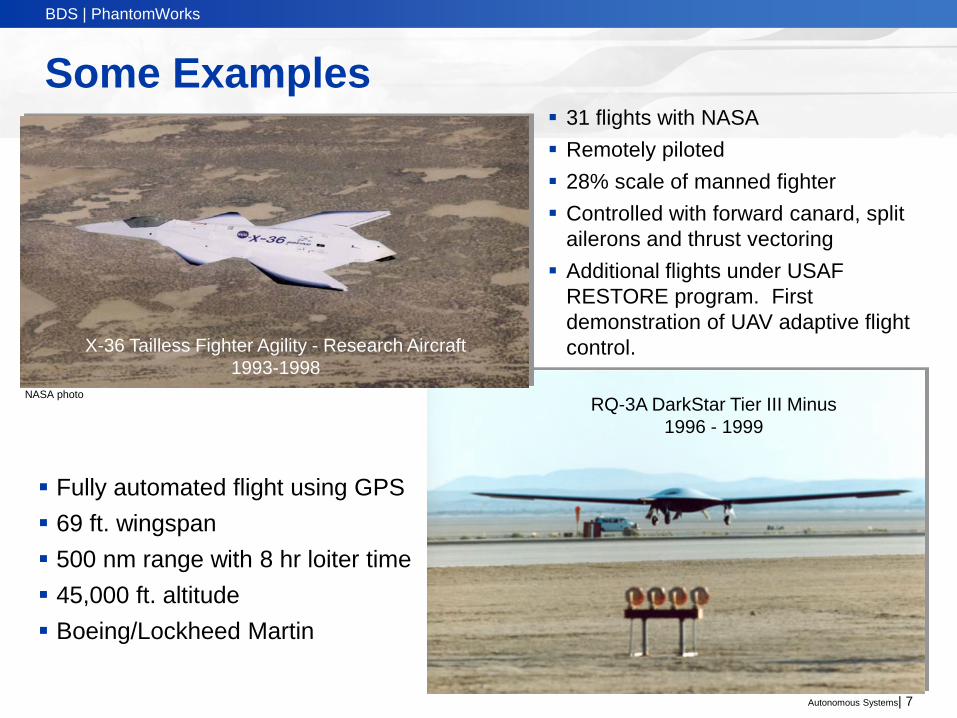
Some Examples
RQ-3A DarkStar Tier III Minus 1996 - 1999
Fully automated flight using GPS 69 ft. wingspan 500 nm range with 8 hr loiter time 45,000 ft. altitude Boeing/Lockheed Martin
31 flights with NASA Remotely piloted 28% scale of manned fighter Controlled with forward canard, split
ailerons and thrust vectoring Additional flights under USAF
RESTORE program. First demonstration of UAV adaptive flight control.X-36 Tailless Fighter Agility - Research Aircraft
1993-1998NASA photo
Autonomous Systems| 7
BDS | PhantomWorks
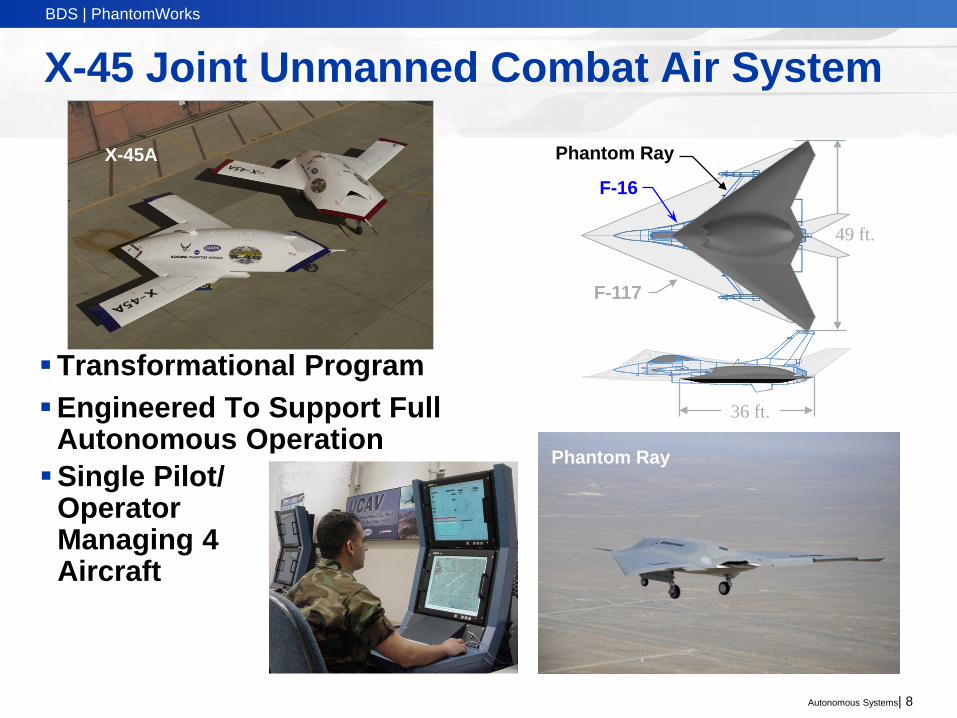
X-45 Joint Unmanned Combat Air System
Autonomous Systems| 8
Transformational ProgramEngineered To Support Full
Autonomous Operation
X-45A
49 ft.
F-16
Phantom Ray
F-117
36 ft.
Phantom RaySingle Pilot/
Operator Managing 4 Aircraft
BDS | PhantomWorks
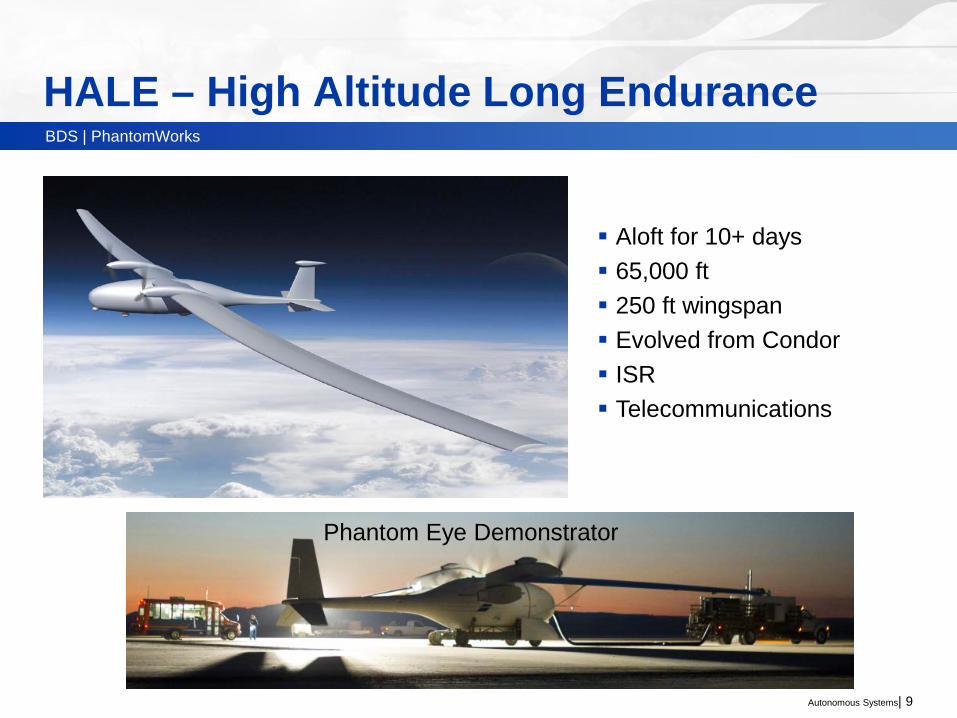
Aloft for 10+ days 65,000 ft 250 ft wingspan Evolved from Condor ISR Telecommunications
HALE – High Altitude Long Endurance
Autonomous Systems| 9
Phantom Eye Demonstrator
BDS | PhantomWorks
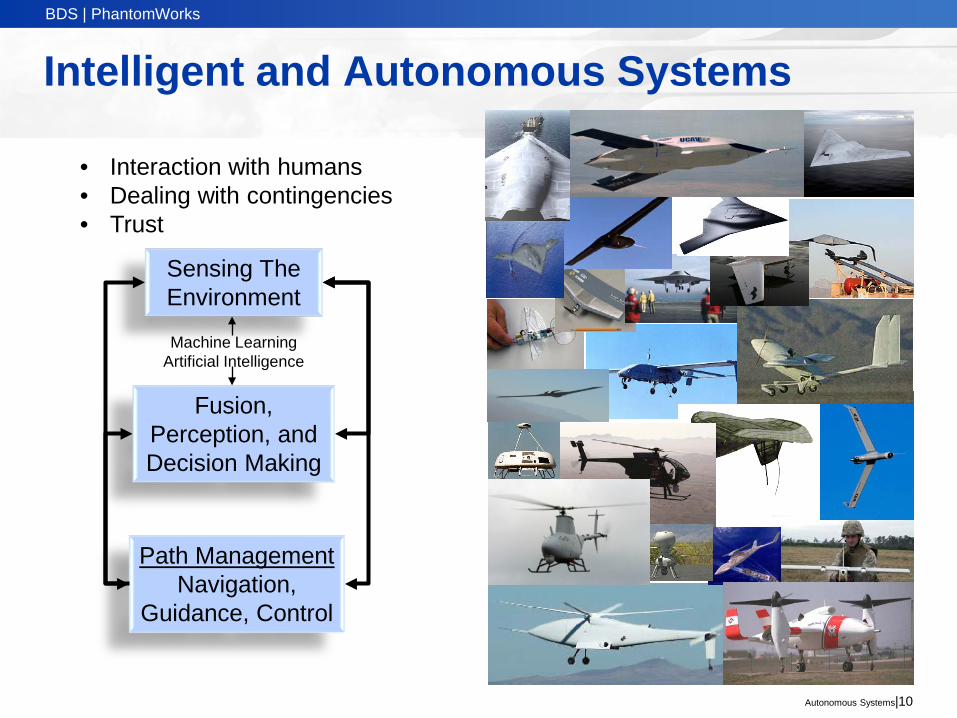
Intelligent and Autonomous Systems
Sensing The Environment
Fusion, Perception, and Decision Making
Path ManagementNavigation,
Guidance, Control
• Interaction with humans• Dealing with contingencies• Trust
Autonomous Systems|10
Machine LearningArtificial Intelligence
BDS | PhantomWorks
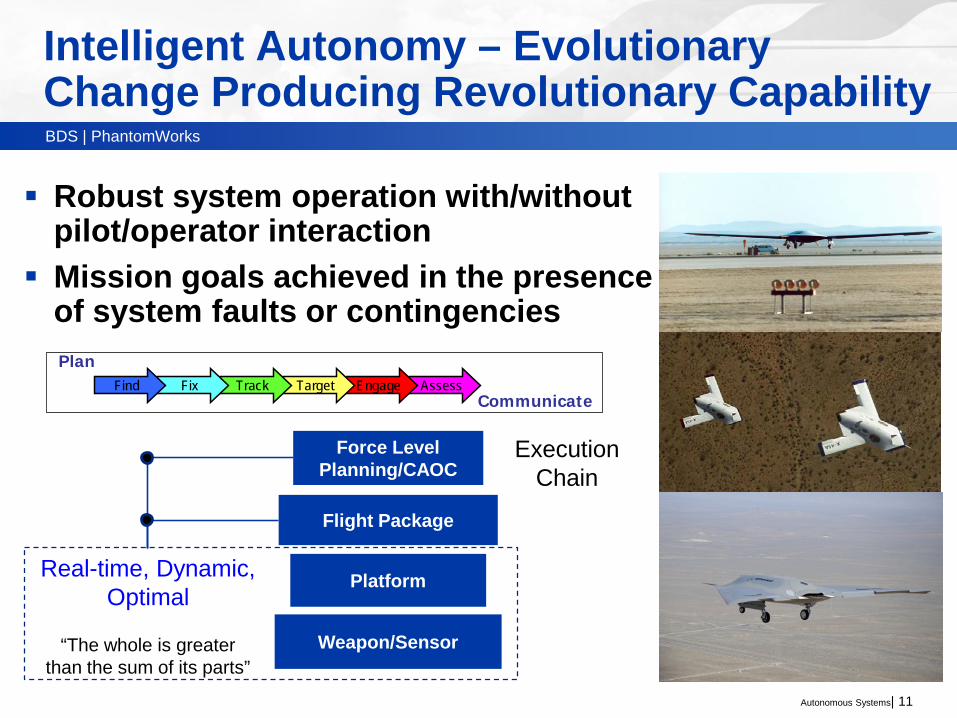
Intelligent Autonomy – Evolutionary Change Producing Revolutionary Capability
Robust system operation with/without pilot/operator interaction
Mission goals achieved in the presence of system faults or contingencies
Force Level Planning/CAOC
Flight Package
Weapon/Sensor
Platform
Execution Chain
Real-time, Dynamic,Optimal
AssessEngageTargetTrackFixFindPlan
Communicate
“The whole is greater than the sum of its parts”
Autonomous Systems| 11
BDS | PhantomWorks
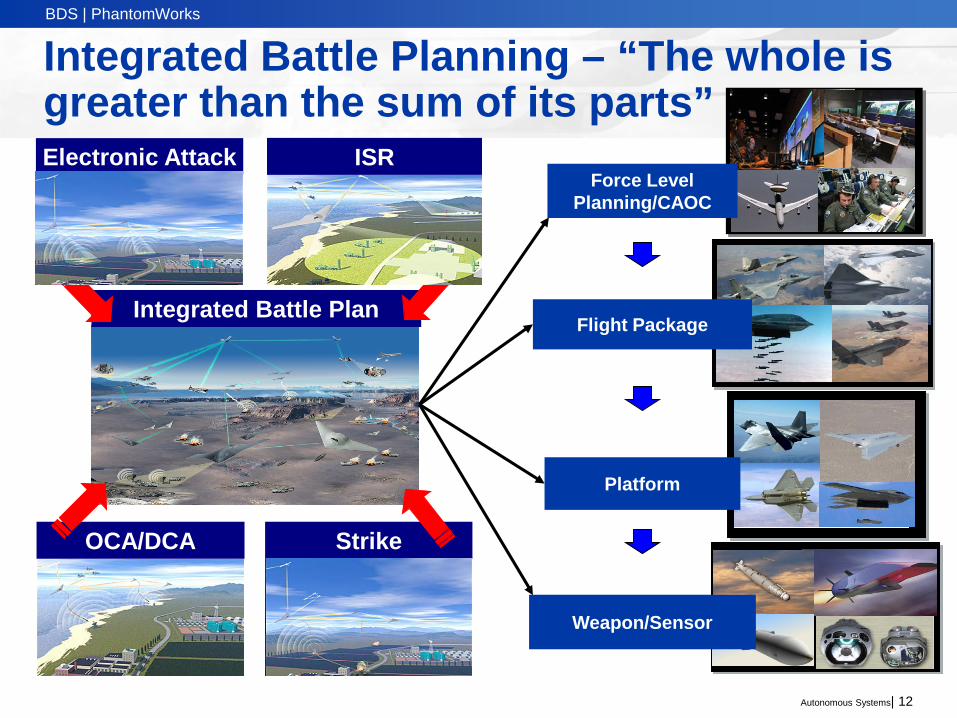
Integrated Battle Planning – “The whole is greater than the sum of its parts”Electronic Attack ISR
Strike
Integrated Battle Plan
OCA/DCA
Force Level Planning/CAOC
Flight Package
Weapon/Sensor
Platform
Autonomous Systems| 12
BDS | PhantomWorks
5K5K
5K5K
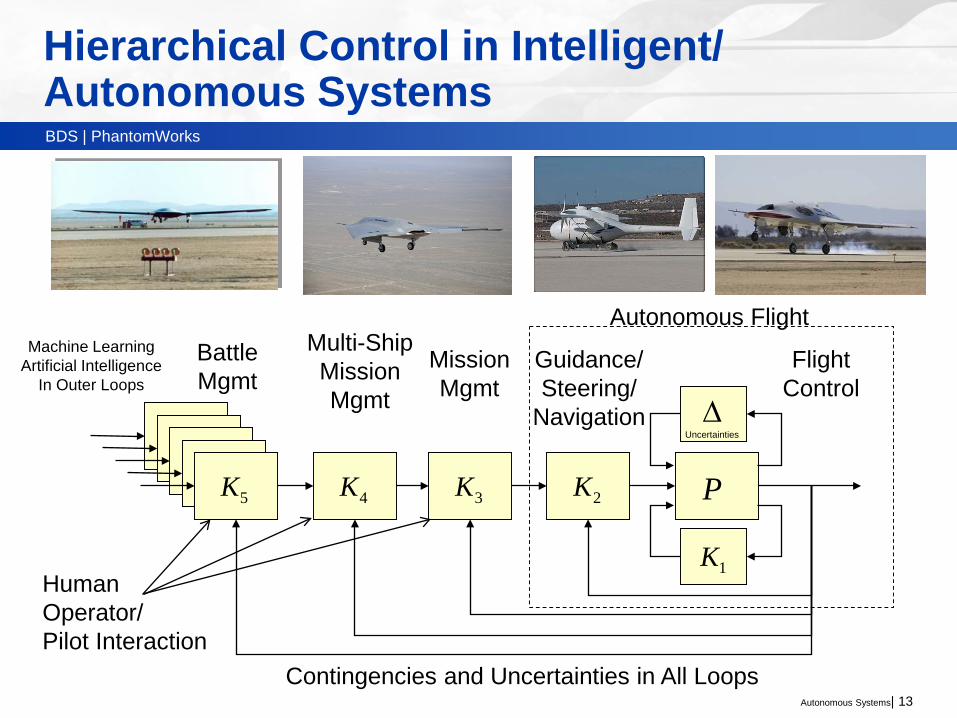
Hierarchical Control in Intelligent/ Autonomous Systems
P
∆
1K
Uncertainties
Flight Control
Guidance/ Steering/
Navigation
MissionMgmt
Multi-Ship Mission Mgmt
Battle Mgmt
2K3K4K5K
HumanOperator/Pilot Interaction
Autonomous Flight
Contingencies and Uncertainties in All LoopsAutonomous Systems| 13
Machine LearningArtificial Intelligence
In Outer Loops
BDS | PhantomWorks
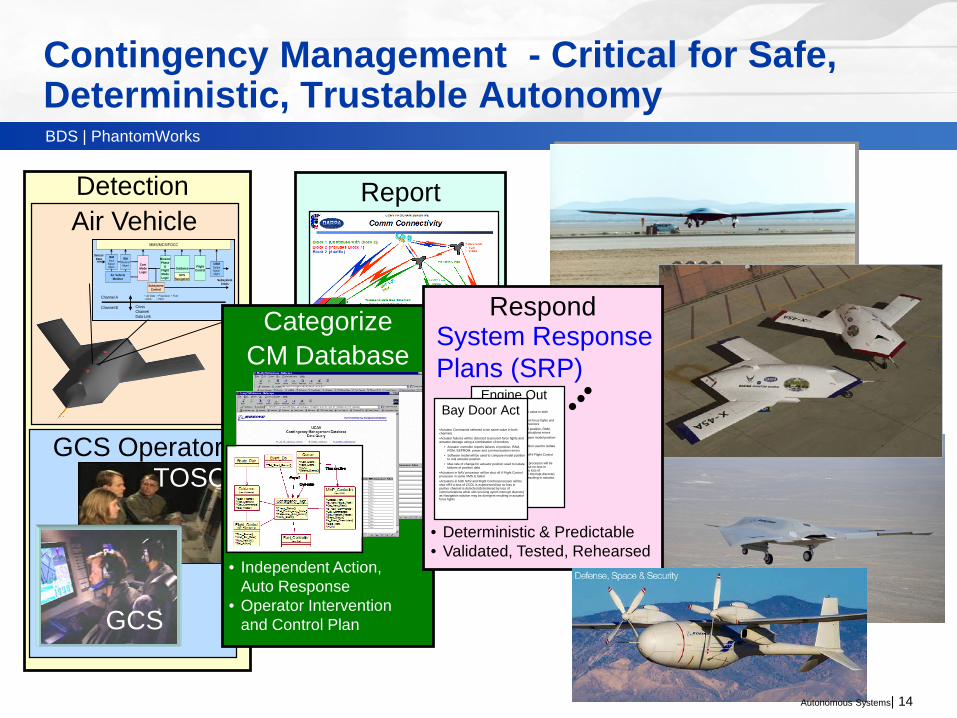
Contingency Management - Critical for Safe, Deterministic, Trustable Autonomy
Detection ReportAir Vehicle
GCS Operator
MCC
GCS
TOSC
MMS/MCS/FOCC
MissionPhase
&FlightModeLogic
Guidance FlightControl
OSMOutputSignal Mgmt
ISMInput
Signal Mgmt
RMRedundMgmt
Air VehicleMonitor
SensorData
ContModeLogic
SubsystemControl
• Air Data• ECS
• Propulsion• PDU
• FuelChannel A
Channel B CrossChannelData Link
SubsystemCmds
GPSNavigation
CategorizeCM Database
• Independent Action, Auto Response
• Operator Intervention and Control Plan
RespondSystem Response Plans (SRP)
Engine Out ••••Actuator Commands selected to be same value in bothchannels•Actuator failures will be detected to prevent force fights andactuator damage using a combination of monitors
• Actuator controller reports failures of position, RAM,ROM, EEPROM, power and communications errors
• Software model will be used to compare model positionto real actuator position
• Max rate of change for actuator position used to isolatefailures of position data
•Actuators in NAV processor will be shut off if Flight Controlprocessor in same VMS is failed•Actuators in both NAV and Flight Control processor will beshut off if a loss of CCDL is experienced but no loss inpartner channel is detected (determined by loss ofcommunications while still receiving synch interrupt discrete)as Navigation solution may be divergent resulting in actuatorforce fights
Bay Door Act •Actuator Commands selected to be same value in bothchannels•Actuator failures will be detected to prevent force fights andactuator damage using a combination of monitors
• Actuator controller reports failures of position, RAM,ROM, EEPROM, power and communications errors
• Software model will be used to compare model positionto real actuator position
• Max rate of change for actuator position used to isolatefailures of position data
•Actuators in NAV processor will be shut off if Flight Controlprocessor in same VMS is failed•Actuators in both NAV and Flight Control processor will beshut off if a loss of CCDL is experienced but no loss inpartner channel is detected (determined by loss ofcommunications while still receiving synch interrupt discrete)as Navigation solution may be divergent resulting in actuatorforce fights
• Deterministic & Predictable• Validated, Tested, Rehearsed
Autonomous Systems| 14
BDS | PhantomWorks
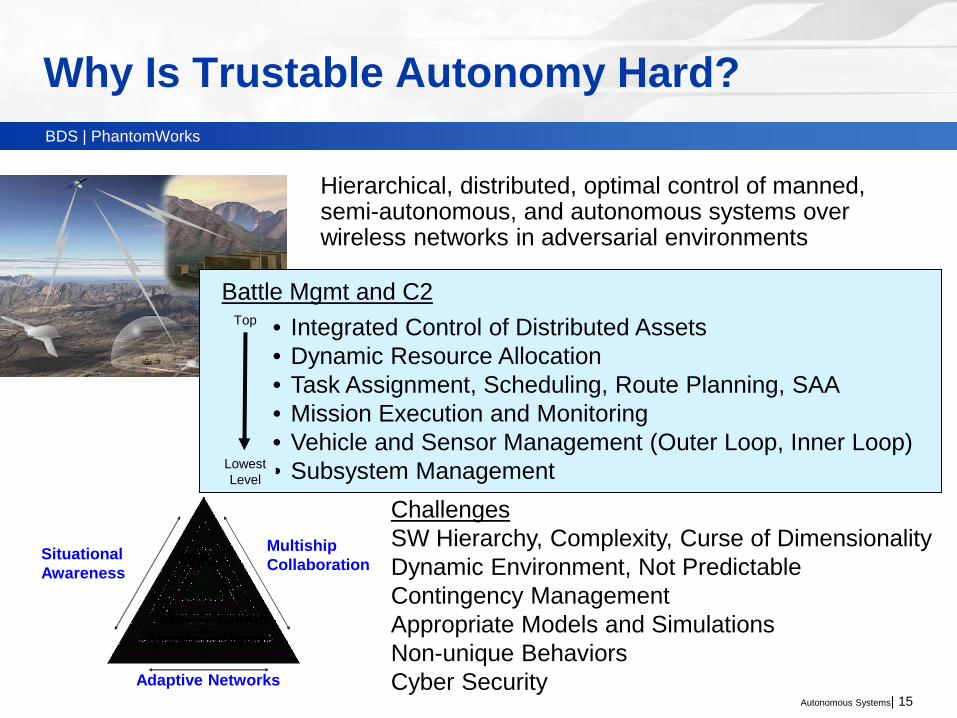
Why Is Trustable Autonomy Hard?
Battle Mgmt and C2• Integrated Control of Distributed Assets• Dynamic Resource Allocation• Task Assignment, Scheduling, Route Planning, SAA• Mission Execution and Monitoring• Vehicle and Sensor Management (Outer Loop, Inner Loop)• Subsystem Management
Top
LowestLevel
Hierarchical, distributed, optimal control of manned, semi-autonomous, and autonomous systems over wireless networks in adversarial environments
CommMgmt
Situational Awareness
Multiship Collaboration
Adaptive Networks
BMC2
InfoMgmt
ChallengesSW Hierarchy, Complexity, Curse of DimensionalityDynamic Environment, Not PredictableContingency ManagementAppropriate Models and SimulationsNon-unique BehaviorsCyber Security
Autonomous Systems| 15
BDS | PhantomWorks
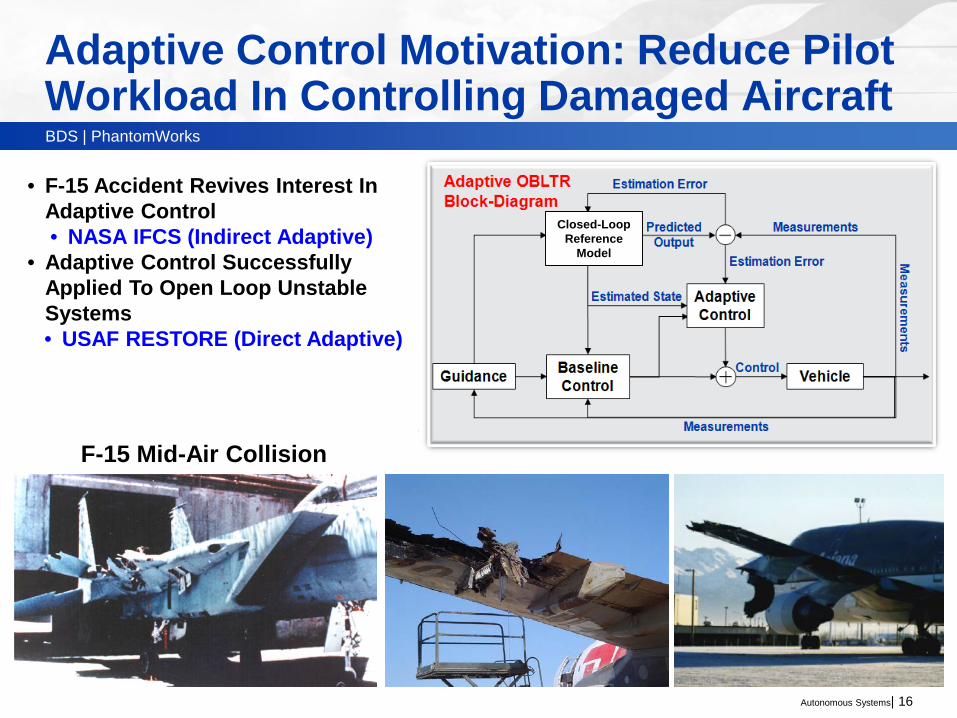
Adaptive Control Motivation: Reduce Pilot Workload In Controlling Damaged Aircraft
F-15 Mid-Air CollisionA-300 Missile Attack B-747 Engine Failure
• F-15 Accident Revives Interest In Adaptive Control• NASA IFCS (Indirect Adaptive)
• Adaptive Control Successfully Applied To Open Loop Unstable Systems• USAF RESTORE (Direct Adaptive)
Autonomous Systems| 16
Closed-LoopReference
Model
BDS | PhantomWorks
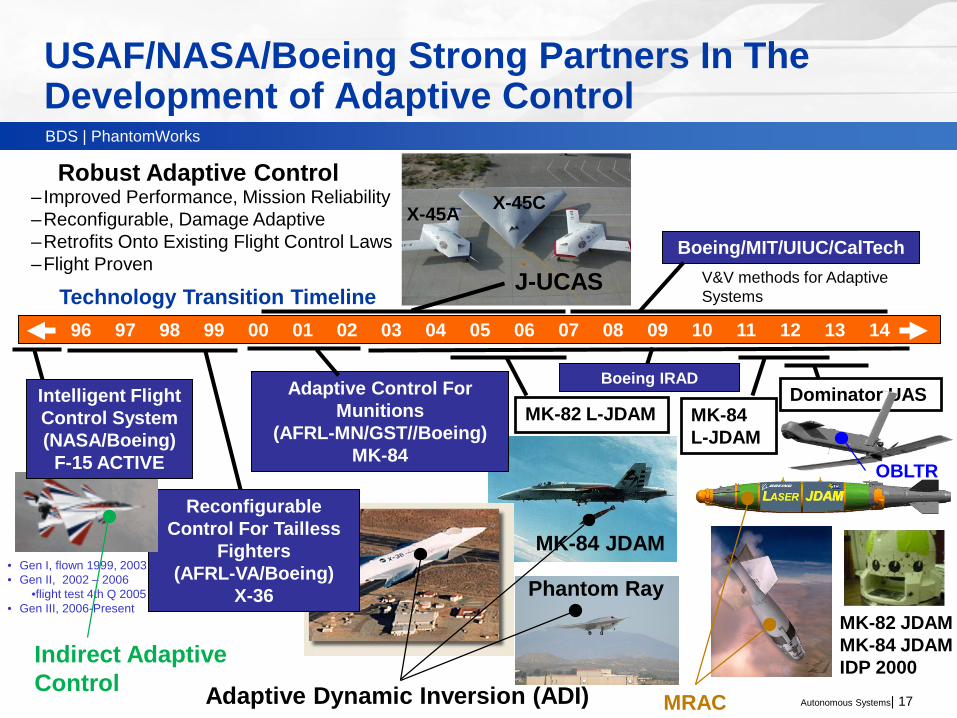
USAF/NASA/Boeing Strong Partners In The Development of Adaptive Control
–Improved Performance, Mission Reliability–Reconfigurable, Damage Adaptive–Retrofits Onto Existing Flight Control Laws–Flight Proven
96 97 98 99 00 01 02 03 04
MK-82 L-JDAM
Reconfigurable Control For Tailless
Fighters (AFRL-VA/Boeing)
X-36
MK-84 JDAM
Adaptive Control For Munitions
(AFRL-MN/GST//Boeing)MK-84
05
Robust Adaptive Control
Technology Transition Timeline
X-45CX-45A
J-UCAS
06 07 13
Boeing IRAD
MK-84L-JDAM
MK-82 JDAMMK-84 JDAMIDP 2000
08 09 10 11 12
Intelligent Flight Control System (NASA/Boeing)
F-15 ACTIVE
• Gen I, flown 1999, 2003• Gen II, 2002 – 2006
•flight test 4th Q 2005• Gen III, 2006-Present
Boeing/MIT/UIUC/CalTechV&V methods for Adaptive Systems
Phantom Ray
14
Dominator UAS
MRAC
OBLTR
Indirect Adaptive Control Adaptive Dynamic Inversion (ADI) Autonomous Systems| 17

BDS | PhantomWorks
An Adaptive Control Challenge: Very Flexible Aircraft
Output Feedback Control Architectures Needed For New VFA Aircraft DesignsDesire Model Based Flight Control Design
Large Uncertainties Require Robust Adaptive Control, x Ax Bu y Cx= + =
Big HALE
Vulture400 ft span
250 ft span
800 State ModelsFlex Modes < 1 Hz
Large DeflectionsMust Control Shape
Helios
Autonomous Systems| 18
BDS | PhantomWorks
Copyright © 2014 Boeing. All rights reserved.
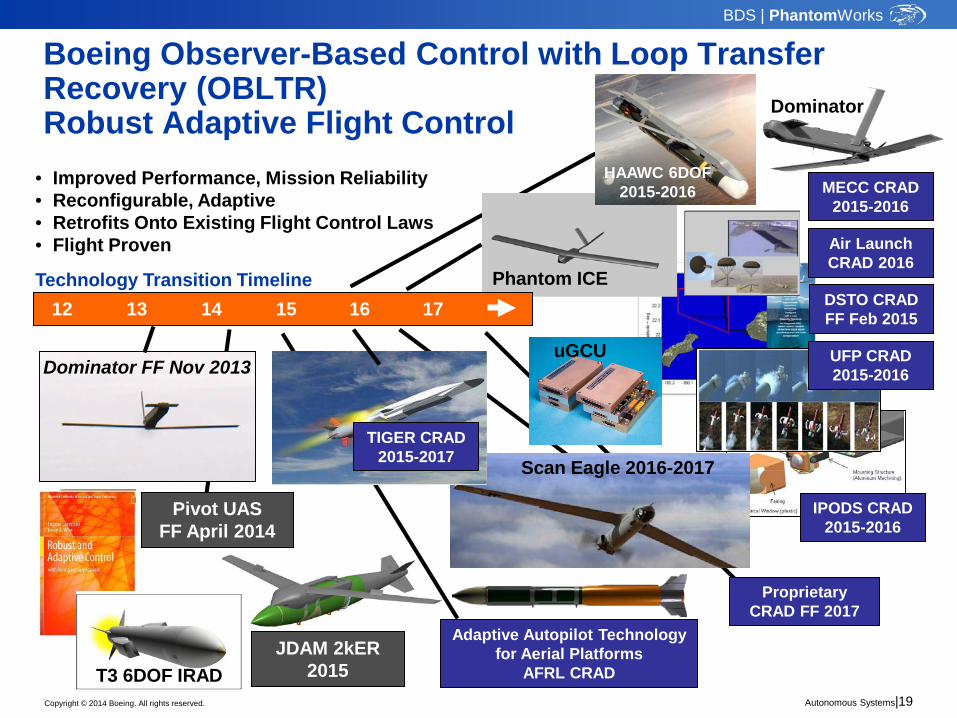
Boeing Observer-Based Control with Loop Transfer Recovery (OBLTR)Robust Adaptive Flight Control
Technology Transition Timeline
SDB
X-45
1312 14
GBU-57 MOP• Improved Performance, Mission Reliability• Reconfigurable, Adaptive• Retrofits Onto Existing Flight Control Laws• Flight Proven
15 16 17
Pivot UASFF April 2014
Dominator FF Nov 2013 UFP CRAD2015-2016
IPODS CRAD2015-2016
Adaptive Autopilot Technology for Aerial Platforms
AFRL CRAD
Proprietary CRAD FF 2017
JDAM 2kER2015
HAAWC 6DOF2015-2016
T3 6DOF IRAD
Air Launch CRAD 2016
DSTO CRADFF Feb 2015
MECC CRAD2015-2016
Scan Eagle 2016-2017
uGCU
Phantom ICE
Dominator
TIGER CRAD2015-2017
Autonomous Systems|19
BDS | PhantomWorks
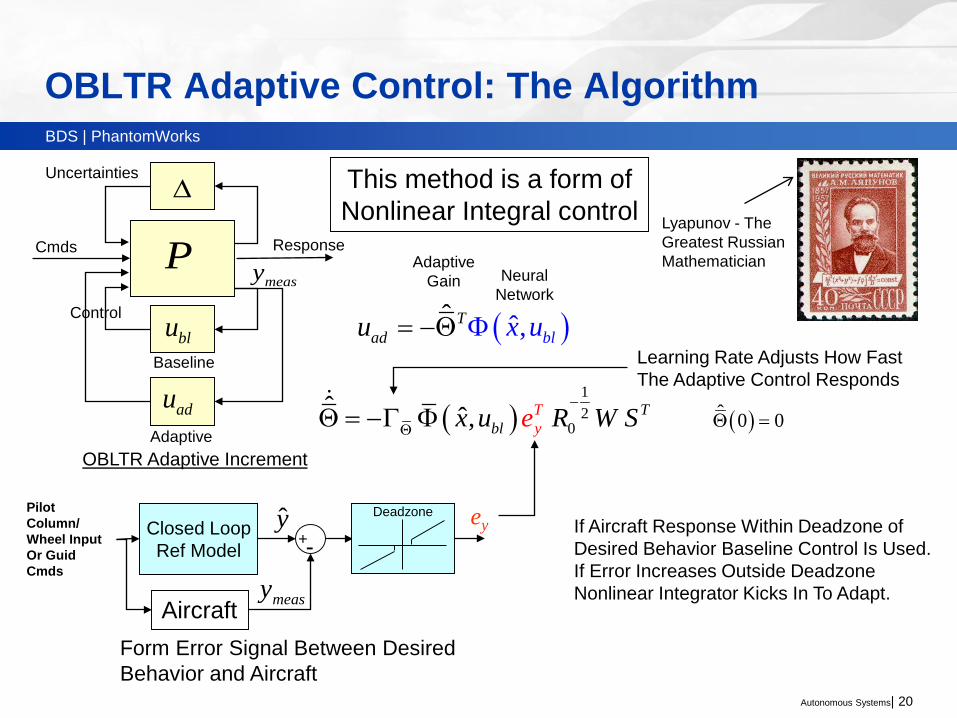
OBLTR Adaptive Control: The Algorithm
( )ˆ ˆ,Tad blx uu = −Θ Φ
OBLTR Adaptive Increment
Learning Rate Adjusts How Fast The Adaptive Control Responds
Control
This method is a form of Nonlinear Integral control
( )ˆ 0 0Θ =
Form Error Signal Between Desired Behavior and Aircraft
Closed LoopRef Model
Pilot Column/Wheel InputOr Guid Cmds
Aircraft
ey+-
DeadzoneIf Aircraft Response Within Deadzone of Desired Behavior Baseline Control Is Used. If Error Increases Outside Deadzone Nonlinear Integrator Kicks In To Adapt.
measyP
∆
blu
adu
Cmds Response
Uncertainties
Baseline
Adaptive
Lyapunov - The Greatest Russian Mathematician
( )12
0ˆ ˆ, T
bT
l yx u Re W S−
ΘΘ = −Γ Φ
y
measy
Autonomous Systems| 20
AdaptiveGain Neural
Network
BDS | PhantomWorks
Summary
Autonomous Systems| 21
100+ Years Of Unmanned Aircraft. There Here To Stay– New roles/missions for commercial operation– GAFA all developing capabilities
Intelligent Autonomy– Automotive industry developing autonomous capabilities at a fast pace– Aerospace applications emerging
Adaptive Control– Improved safety if something goes wrong/fails– Automotive and Aerospace applications emerging









![IN REVIEW, SPECIAL ISSUE ON NEURODYNAMIC SYSTEMS FOR ... · Control systems using machine learning models are popular in robotics, autonomous and aerospace systems [11], [12] but](https://img.pdfslide.net/doc/110x75/5ea232d59a07911cb20aaac9/in-review-special-issue-on-neurodynamic-systems-for-control-systems-using-machine.jpg)



















