Embed Size (px)
Citation preview
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
1
Abstract—This paper presents a new centralized adaptive
under-frequency load shedding controller that is integrated with
a distribution state estimator to improve the frequency stability
of islanded microgrids. Whilst under-frequency load shedding is
a well-established corrective emergency frequency control action,
it is not entirely suitable for use in microgrids with low inertia
and a limited number of measurement devices. The novel
centralized controller presented in this paper overcomes these
challenges by incorporating a distribution state estimator to
estimate the power consumption of the demand. In parallel to
this, the actual active power imbalance in the microgrid is
estimated by simultaneously monitoring the system frequency
and its rate of change. The centralized controller uses these two
variables to determine the correct amount of load to be shed. The
performance of the proposed controller has been validated using
computer simulations of the actual distribution network in
Malaysia. These simulation results show the effectiveness of the
proposed centralized controller for preventing power system
instabilities, which might lead to cascading outages and even a
complete blackout in microgrids that have been
disconnected/islanded, from the main grid.
Index Terms—Centralized under-frequency load shedding,
distribution network, distributed resource, distribution state
estimator, islanding operation, microgrid.
ACRONYMS AND ABBREVIATIONS
CAULSC Centralized Adaptive Under-frequency Load
Shedding Controller
COI the equivalent Centre of Inertia
DR Distributed Resource
DSE Distribution State Estimator
DSEM Distribution State Estimator Module
DMS Distribution Management System
ECM Event Calculator Module
FCM Frequency Calculator Module
LSCM Load Shedding Controller Module
PCC Point of Common Coupling
Mazaher Karimi, Peter Wall and Vladimir Terzija are with School of
Electrical and Electronic Engineering, The University of Manchester, Manchester, M13 9PL, UK. (E-mail: [email protected],
[email protected] and [email protected]).
Hazlie Mokhlis are with Department of Electrical Engineering, Faculty of Engineering, University of Malaya, Kuala Lumpur, 50603, Malaysia. (E-mail:
PMU Phasor Measurement Unit
ROCOF Rate of Change of Frequency
UFLS Under-Frequency Load Shedding
I. INTRODUCTION
HE islanded operation of a microgrid enables the
continued supply of power to customers during any
interruption of the supply from the main grid. This is achieved
by using the available Distributed Resource (DR) in the
distribution system to supply electrical power whenever the
main grid is disconnected. With this approach in mind, in
2011 a guide for the design and operation of islanded systems
with a high penetration of DR when integrated with the main
electric power system (IEEE Standard 1547.4-2011) was
approved [1].
However, even with such a guide, operating DRs in an
islanded microgrid poses a number of issues, foremost of
which is the risk of frequency instability. When a distribution
network is islanded it will continue to experience fluctuations
in load and generation but will not have the support of the rest
of the system, leaving it much more vulnerable to frequency
and voltage excursions. For DRs with low inertia, such as mini
hydro, the system frequency will fall very quickly and the
speed controllers (governors) of the DRs may not be able to
maintain the stability of the microgrid. Therefore, the use of
load shedding to stabilize the frequency of an islanded
microgrid may be necessary.
The most common load shedding technique applied by
power utilities is decentralized conventional under-frequency
load shedding (UFLS), which disconnects certain predefined
loads or feeders based on certain frequency threshold values
and with a predefined delay. The main flaw of this predefined
load shedding is that it lacks an estimate of the load power
imbalance in the system, which means that the amount of load
to be shed is based on an assumed system state and size of
imbalance and not the actual system conditions. Therefore, in
practice, the scheme will tend to either over shed or under
shed, both of which can have undesirable consequences. Over
shedding is a particular threat to the stability of low inertia
systems because they will experience a larger initial Rate of
Change of Frequency (ROCOF) after the shedding, which may
cause the maloperation of loss of mains or other ROCOF
based protection.
A New Centralized Adaptive Under-Frequency
Load Shedding Controller for Microgrids based
on a Distribution State Estimator
M. Karimi, Member, IEEE, P. Wall, Member, IEEE, H. Mokhlis, Member, IEEE,
V. Terzija, Fellow, IEEE
T

0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
2
The problem of load power imbalance estimation has been
widely investigated [1-4]. Hence, adaptive load shedding
schemes have been introduced that improve upon conventional
load shedding by only shedding the required amount of load,
which is calculated in real time by assessing the actual rate of
change of the system frequency (df/dt - ROCOF) [5, 6].
However, ROCOF can be difficult to measure accurately,
especially when the measurement point is close to a
disturbance, induction machines or dynamic loads. In [7], an
interesting simulation based study is presented to quantify the
level of performance for traditional UFLS scheme in different
operating conditions.
Adaptive UFLS schemes can be further improved by using
a centralized UFLS controller and power system automation
and communication devices to shed the correct amount of load
at the correct locations [6, 8, 9]. Various UFLS schemes that
depend on modern communication devices have been
investigated in the open literature [10-12]. In [13, 14] voltage
dependent load modeling was incorporated to enhance the
active power imbalance estimation. Other research has been
conducted into the use of combinational load shedding
methods that can address voltage stability issues as part of
adaptive UFLS. In [15], an adaptive UFLS scheme that
combines event-based and response-based methods is
proposed for an islanded distribution system. However, its
efficacy relies on a significant number of measurement
devices, which makes the scheme uneconomical for practical
application.
In practice, distribution systems have a limited number of
measurement devices that are commonly located at the main
substations, i.e. not at the load buses that must be monitored
by the centralized controller. In order to address this
limitation, a Distribution State Estimator (DSE) [16-20] can be
used to determine the loading (active and reactive power) and
voltage at those buses where measurements are not available.
The reduced number of measurements available in DSE, when
compared to a transmission state estimator, means that the use
of pseudo measurements is commonplace. Pseudo
measurements can be obtained using approximate methods
such as load forecasting or historical data.
In this paper, a new Centralized Adaptive Under-frequency
Load Shedding Controller (CAULSC) based on UFLS and
DSE is proposed for microgrids with DRs. This extends on the
work presented in [15] by using DSE to mitigate the
dependence of the centralized controller on excessive
investment in new measurement devices. The proposed
CAULSC can significantly contribute to the frequency
stability of islanded microgrids. This has been demonstrated
through a number of different case studies of generator
tripping, load increases and loss of the main grid connection
for part of the distribution network in Malaysia.
II. LOAD FREQUENCY CONTROL IN POWER SYSTEMS
Load frequency control is responsible for ensuring the
frequency stability of power systems. Because of the random
nature of the demand, a power system is never in an entirely
balanced state and the system frequency will decrease if there
is an excess of load and increase if there is an excess of
generation. Hence, the system frequency reflects the
imbalance between generation and load and must be closely
controlled within a specific range for the following reasons:
The proper operation of many electrical motors and
numerous customer applications depend on the frequency
of supply being close to the nominal value
Modern electronic devices use the frequency of their
supply as a foundation for timing various processes.
The performance of many of the auxiliary services of a
generator are frequency dependent and if they under-
perform the power station output may be reduced or
generator tripping could occur.
In order to maintain a satisfactory frequency the speed of
the generators must be precisely controlled, since they dictate
the system’s frequency and inefficient control would increase
the cost of operating the power system. When the shaft
decelerates (accelerates) a proportional decrease (increase) in
the frequency will occur.
In a generator, the prime mover is generally equipped with a
governor that monitors the shaft speed and decreases
(increases) the torque applied to the shaft if the speed is below
(above) the reference speed. The governor acts to limit the
frequency deviation by providing primary control after a
disturbance but does not act to return the frequency to its
nominal value. To return the system frequency to the nominal
value a secondary regulation is required; this involves the set
point of the generator being changed to decrease (increase) the
output power of the generator for a given speed.
Therefore, the size of the frequency deviation after a given
disturbance depends on the amount of governor response and
spinning reserve that is available in the system. If the
deviation is allowed to become too large then the under/over
frequency protection of the generators will be forced to
disconnect them from the system to prevent them from being
damaged. In the case of an over frequency this generator
tripping constitutes negative feedback, as losing a generator
will cause the frequency to fall. However, in the case of an
under-frequency it will constitute positive feedback and the
loss of each generator will only exacerbate the severity of the
deviation. The tripping of generators should not be viewed as
a desirable strategy for controlling over-frequencies, but the
contrasting nature of the feedback in each scenario does mean
that under-frequency conditions tend to be a greater threat to
system stability. Under-frequency load shedding is an
effective corrective measure for limiting frequency deviations
below nominal frequency to an acceptable range and
preventing generator tripping. Therefore, it is important to
coordinate the under-frequency protection of generators with
the under-frequency load shedding, i.e. the load shedding must
operate prior to the generator under-frequency protection if
system collapse is to be averted.
III. CENTRALIZED ADAPTIVE UNDER-FREQUENCY LOAD
SHEDDING CONTROLLER (CAULSC) FOR MICROGRIDS
In this paper, a CAULSC is proposed based on UFLS and
DSE to improve the frequency stability of microgrids with
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
3
significant penetrations of DR when they are operated as
isolated islands. The CAULSC is modular in nature and
consists of the following four major modules:
(a) Event Calculator Module (ECM),
(b) Frequency Calculator Module (FCM),
(c) Distribution State Estimator Module (DSEM) and
(d) Load Shedding Controller Module (LSCM).
The proposed controller has two modes of operation: (a)
Event based (b) Response based. The event based mode is
used to contain the frequency deviation after two types of
event (i) when the microgrid is islanded from the grid, (ii)
when one of the generators in the microgrid is disconnected
and the microgrid has already been islanded. When operating
in the event based mode the power imbalance is determined
using power flow measurements from the Point of Common
Coupling (PCC) (point of connection to the main grid) (i) or
the generator that has been disconnected (ii). The response
based mode allows the controller to react to sudden increases
in load demand in an islanded microgrid. The response based
mode determines the power imbalance based on the ROCOF
measured after the disturbance and the microgrid inertia [21].
For both modes of operation the proposed controller
separates the load shedding into four stages that are triggered
by applying user defined thresholds to the frequency of the
center of inertia (fc). The thresholds used here are 49.5 Hz,
49.0 Hz, 48.5 Hz and 48.0 Hz. The first stage of the load
shedding also has a second threshold that is applied to the
ROCOF. Specifically, this first stage will be performed if the
df/dt<=0 for 140 ms and the system frequency f < 49.5 Hz.
The power imbalance, ΔP, is used to calculate the necessary
level of shedding, Pshed, and each stage sheds a user defined
percentage of this imbalance. In the example presented here
the stages shed the following percentage of the imbalance
70 %, 15 %, 10 % and 5 %. The loads shed are selected based
on the load demand estimated by the DSEM and the priority of
the loads, i.e. low priority loads are shed first.
The proposed load shedding scheme will not shed load
equal to the power imbalance created by the disturbance.
Using four stages of load shedding increases the opportunity
for the primary frequency response to contribute to containing
the deviation, which is preferable to increased shedding. The
first stage is the largest stage in order to quickly limit the
ROCOF and prevent a severe frequency drop from occurring
in the microgrid. This large initial shedding is preferable in
microgrids, as their low inertia and limited primary response
resources can cause them to experience large swings in
frequency. Furthermore, operating at reduced frequency is a
particular threat to microgrids, as their low inertia and small
size (in terms of MW load) means that they can be vulnerable
to load changes causing noticeable changes in frequency.
If, after the first stage of shedding, the frequency has not
recovered to above 49.5 Hz then further stages of load
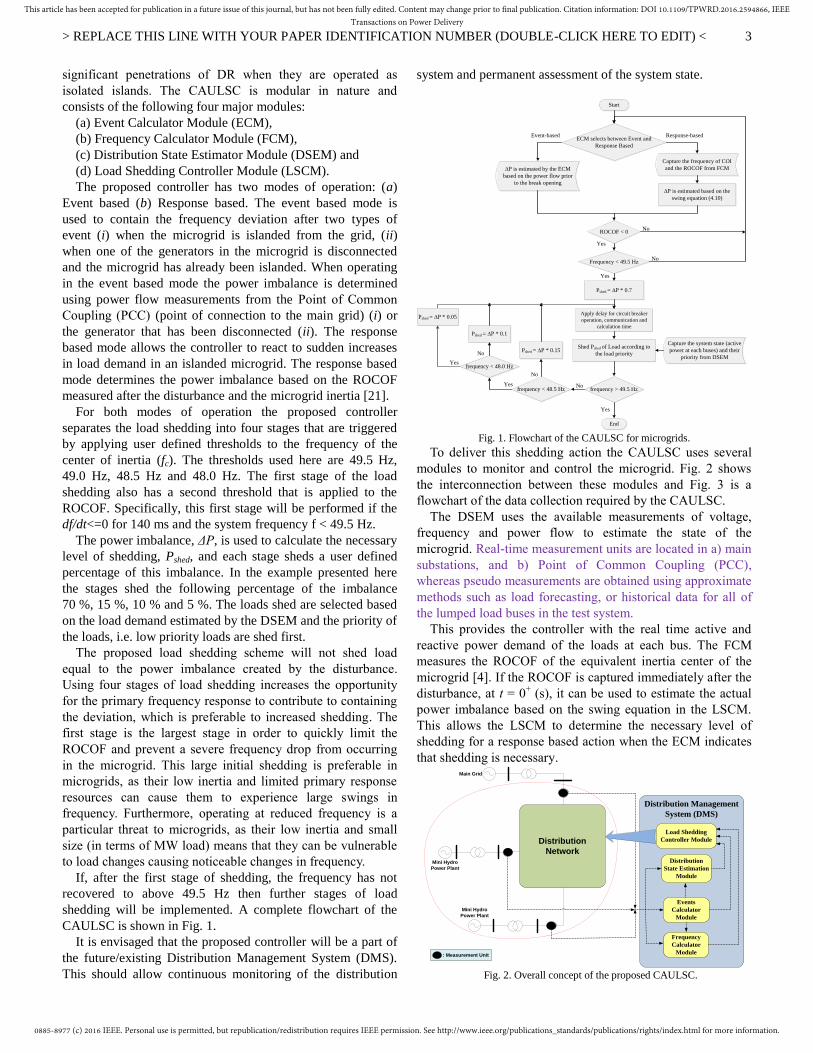
shedding will be implemented. A complete flowchart of the
CAULSC is shown in Fig. 1.
It is envisaged that the proposed controller will be a part of
the future/existing Distribution Management System (DMS).
This should allow continuous monitoring of the distribution
system and permanent assessment of the system state.
Fig. 1. Flowchart of the CAULSC for microgrids.
To deliver this shedding action the CAULSC uses several
modules to monitor and control the microgrid. Fig. 2 shows
the interconnection between these modules and Fig. 3 is a
flowchart of the data collection required by the CAULSC.
The DSEM uses the available measurements of voltage,
frequency and power flow to estimate the state of the
microgrid. Real-time measurement units are located in a) main
substations, and b) Point of Common Coupling (PCC),
whereas pseudo measurements are obtained using approximate
methods such as load forecasting, or historical data for all of
the lumped load buses in the test system.
This provides the controller with the real time active and
reactive power demand of the loads at each bus. The FCM
measures the ROCOF of the equivalent inertia center of the
microgrid [4]. If the ROCOF is captured immediately after the
disturbance, at t = 0+ (s), it can be used to estimate the actual
power imbalance based on the swing equation in the LSCM.
This allows the LSCM to determine the necessary level of
shedding for a response based action when the ECM indicates
that shedding is necessary. Main Grid
Frequency
Calculator
Module
Load Shedding
Controller ModuleDistribution
NetworkDistribution
State Estimation
Module
Distribution Management
System (DMS)
Mini Hydro
Power Plant
Mini Hydro
Power Plant
Events
Calculator
Module
: Measurement Unit
Fig. 2. Overall concept of the proposed CAULSC.
Start
Yes
No
ECM selects between Event and
Response Based
∆P is estimated by the ECM
based on the power flow prior
to the break opening
Response-basedEvent-based
ROCOF < 0
Frequency < 49.5 Hz
Apply delay for circuit breaker
operation, communication and
calculation time
Yes
No
Shed Pshed of Load according to
the load priority
Capture the system state (active
power at each buses) and their
priority from DSEM
Yes
frequency > 49.5 Hzfrequency < 48.5 Hz
frequency < 48.0 Hz
Yes
Yes
No
No
No
End
Pshed = ∆P * 0.7
Pshed = ∆P * 0.15
Pshed = ∆P * 0.1
Pshed = ∆P * 0.05
Capture the frequency of COI
and the ROCOF from FCM
∆P is estimated based on the
swing equation (4.10)
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
4
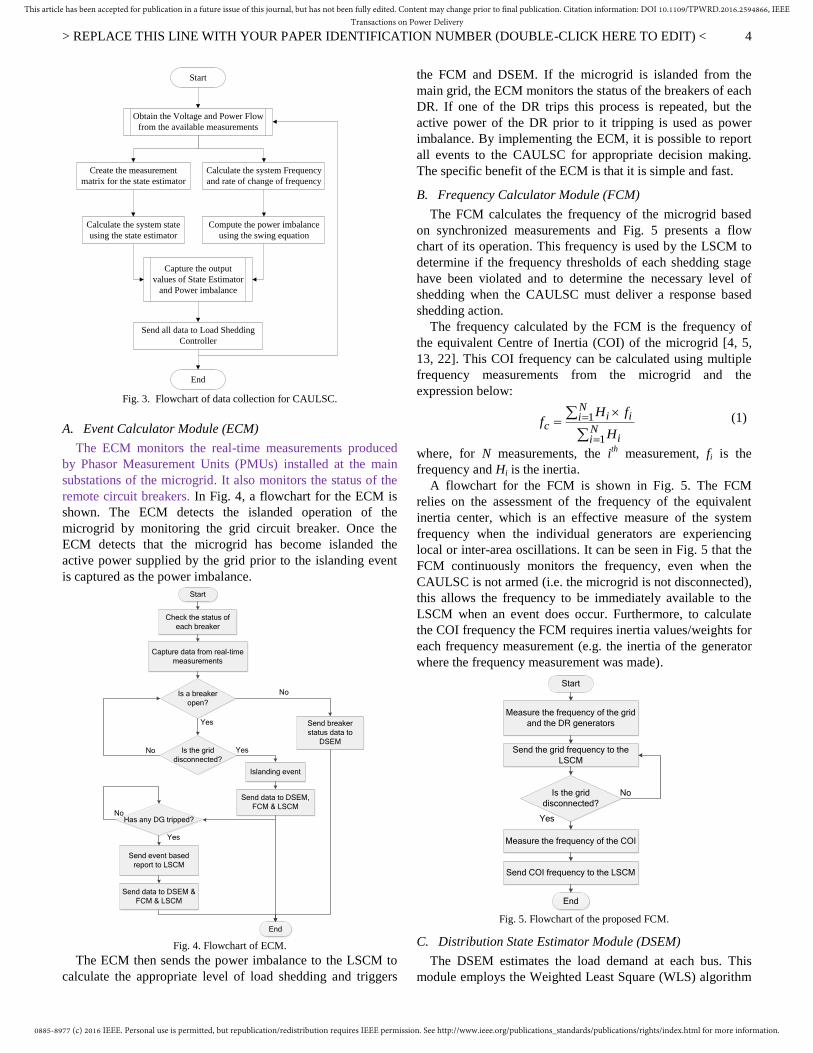
Fig. 3. Flowchart of data collection for CAULSC.
A. Event Calculator Module (ECM)
The ECM monitors the real-time measurements produced
by Phasor Measurement Units (PMUs) installed at the main
substations of the microgrid. It also monitors the status of the
remote circuit breakers. In Fig. 4, a flowchart for the ECM is
shown. The ECM detects the islanded operation of the
microgrid by monitoring the grid circuit breaker. Once the
ECM detects that the microgrid has become islanded the
active power supplied by the grid prior to the islanding event
is captured as the power imbalance.
Start
End
Capture data from real-time
measurements
Is a breaker
open?
Yes
No
Check the status of
each breaker
Is the grid
disconnected?
Send breaker
status data to
DSEM
Yes
No
YesNo
Has any DG tripped?
Islanding event
Send data to DSEM,
FCM & LSCM
Send event based
report to LSCM
Send data to DSEM &
FCM & LSCM
Fig. 4. Flowchart of ECM.
The ECM then sends the power imbalance to the LSCM to
calculate the appropriate level of load shedding and triggers
the FCM and DSEM. If the microgrid is islanded from the
main grid, the ECM monitors the status of the breakers of each
DR. If one of the DR trips this process is repeated, but the
active power of the DR prior to it tripping is used as power
imbalance. By implementing the ECM, it is possible to report
all events to the CAULSC for appropriate decision making.
The specific benefit of the ECM is that it is simple and fast.
B. Frequency Calculator Module (FCM)
The FCM calculates the frequency of the microgrid based
on synchronized measurements and Fig. 5 presents a flow
chart of its operation. This frequency is used by the LSCM to
determine if the frequency thresholds of each shedding stage
have been violated and to determine the necessary level of
shedding when the CAULSC must deliver a response based
shedding action.
The frequency calculated by the FCM is the frequency of
the equivalent Centre of Inertia (COI) of the microgrid [4, 5,
13, 22]. This COI frequency can be calculated using multiple
frequency measurements from the microgrid and the
expression below:
1
1
Ni ii
c Nii
H ff
H
(1)
where, for N measurements, the ith
measurement, fi is the
frequency and Hi is the inertia.
A flowchart for the FCM is shown in Fig. 5. The FCM
relies on the assessment of the frequency of the equivalent
inertia center, which is an effective measure of the system
frequency when the individual generators are experiencing
local or inter-area oscillations. It can be seen in Fig. 5 that the
FCM continuously monitors the frequency, even when the
CAULSC is not armed (i.e. the microgrid is not disconnected),
this allows the frequency to be immediately available to the
LSCM when an event does occur. Furthermore, to calculate
the COI frequency the FCM requires inertia values/weights for
each frequency measurement (e.g. the inertia of the generator
where the frequency measurement was made).
Start
Measure the frequency of the grid
and the DR generators
Yes
NoIs the grid
disconnected?
Send the grid frequency to the
LSCM
End
Measure the frequency of the COI
Send COI frequency to the LSCM
Fig. 5. Flowchart of the proposed FCM.
C. Distribution State Estimator Module (DSEM)
The DSEM estimates the load demand at each bus. This
module employs the Weighted Least Square (WLS) algorithm
Start
Create the measurement
matrix for the state estimator
Obtain the Voltage and Power Flow
from the available measurements
Calculate the system Frequency
and rate of change of frequency
Compute the power imbalance
using the swing equation
Calculate the system state
using the state estimator
Capture the output
values of State Estimator
and Power imbalance
End
Send all data to Load Shedding
Controller

0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
5
for DSE. The WLS algorithm uses weights to ensure that more
accurate measurements are more significant in the estimation
process, i.e. they have higher weights. The mx1 vector of
measurements for the DSE, Z, is presented in (2).
( ) , 1, 2,...,i i iZ h x r i m (2)
where, X is the state vector of the system, hi(x) is the nonlinear
function of the system state and ri is the assumed error vector
with a standard Gaussian distribution of zero mean and σi2
variance. The error vector of (2) is defined in (3) and this can
be minimized using the objective function given in (4).
( ), 1, 2,...,i i ir Z h x i m (3)
2
1
( ( ))( )
mi i
i ii
Z h xJ x
R
(4)
where, Rii is a diagonal matrix of [1/σ12, 1/σ2
2, …, 1/σm
2] and
σm2 is the variance of the m
th measurement error. Then, the
state vector, X, can be obtained by solving (5), iteratively.
11
( ) ( ) ( )
Tk k k
G x x H x R Z h x
(5)
where, H(x) is the Jacobian matrix of the nonlinear function
(Jacobian matrix of hi(x)) and G(x) is the Gain matrix, which
is formulated in (6):
1
( ) ( ) ( )
Tk k
G x H x R H x
(6)
The proposed DSE finds the optimal estimate of the power
system state by minimizing the error vector. The measurement
matrix of the proposed DSE is composed of a variety of
measurements such as line power flows, bus power injections,
bus voltage magnitudes and line current flows. However,
constructing the measurement matrix requires the combination
of real-time measurements and pseudo measurements. In this
method, pseudo measurements have been used to improve the
convergence properties of the DSE. The problem of the sparse
nature of h(x) is also solved by using pseudo measurements.
The real and reactive power injection equations at bus i, Pi
and Qi, are defined as follows:
1
( cos sin )m
i i ij ij ij ij jj
P V G B V
(7)
1
( sin cos )m
i i ij ij ij ij jj
Q V G B V
(8)
where, Gij is the conductance between bus i and bus j, Bij is the
susceptance between bus i and bus j, Vi is the voltage
magnitude at bus i and ij is the phase angle between the
voltages at bus i and bus j.
The real and reactive power flow equations, Pij and Qij,
between bus i and bus j are defined as follows:
)sincos()( 0
2
ijijijijjiiijiij BGVVGGVP (9)
)cossin()( 0
2
ijijijijjiiijiij BGVVBBVQ (10)
In order to solve (5), the power flows and injections are
used to build the measurement matrix (hi(x)).
A flowchart of the execution of the DSEM is depicted in
Fig. 6. It should be noted that the injections at each bus are
updated using load models and the new calculated values of
the voltage magnitudes and angles. Finally, the estimated
value of the power consumption at each bus is sent to the
LSCM to ensure the correct amount of load is shed.
Fig .6. Flowchart of the proposed DSEM.
D. Load Shedding Controller Module (LSCM)
The load shedding controller module is responsible for
estimating the power imbalance in the microgrid. When
delivering an event based load shedding action the LSCM uses
the pre-event power flow on the element that has been lost
(e.g. the point of connection to the main system, PCC, or a
monitored generator) as the power imbalance.
When delivering a response based load shedding action the
LSCM uses the COI ROCOF to estimate the power imbalance
according to the following formula [4, 5].
t
c
n
Ni i
d
df
f
HP
12
(11)
where, ΔP is the power imbalance, Hi is the inertia constant of
the ith
generator, fn is the rated frequency, fc is the frequency of
the center of inertia, and N is the number of generators.
The LSCM determines the power imbalance immediately;
however, the load shedding action is only initialized when the
ROCOF is less than zero and the system frequency is below
49.5 Hz. During the simulation presented here a delay time of
100 ms is included to account for the delays involved in
communication, calculation and circuit breaker operation [15].
An important feature of the LSCM is that it sheds the loads
according to a priority sequence, i.e. the lower priority loads
are shed first (the loads have been classified as vital, semi-
vital and non-vital).
Start
End
Real-time
Measurements Data
Pseudo
Measurements Data
Initial V & Ѳ
Iteration=1
Tolerance=ε
Construct h(x)
Measurement Matrix
Calculate R Matrix
(Weight Matrix)
Calculate Jacobian
Matrix
Construct Gm
Matrix
Calculate
HT*R
-1*(Z-h(x))
Compute ∆x
|∆x|<CriterionIteration<Max
Iteration
No
Yes
Iteration = Iteration+1
Yes
No
Compute New
Value of V & Ѳ
Not ConvergeConverge
Calculate new P&Q with new
value of voltages by
coordination of load modeling
Update new voltages and
angles for next iteration
Change P&Q
values in
Data Base
Apply reading and
communication delay
time (100 ms)
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
6
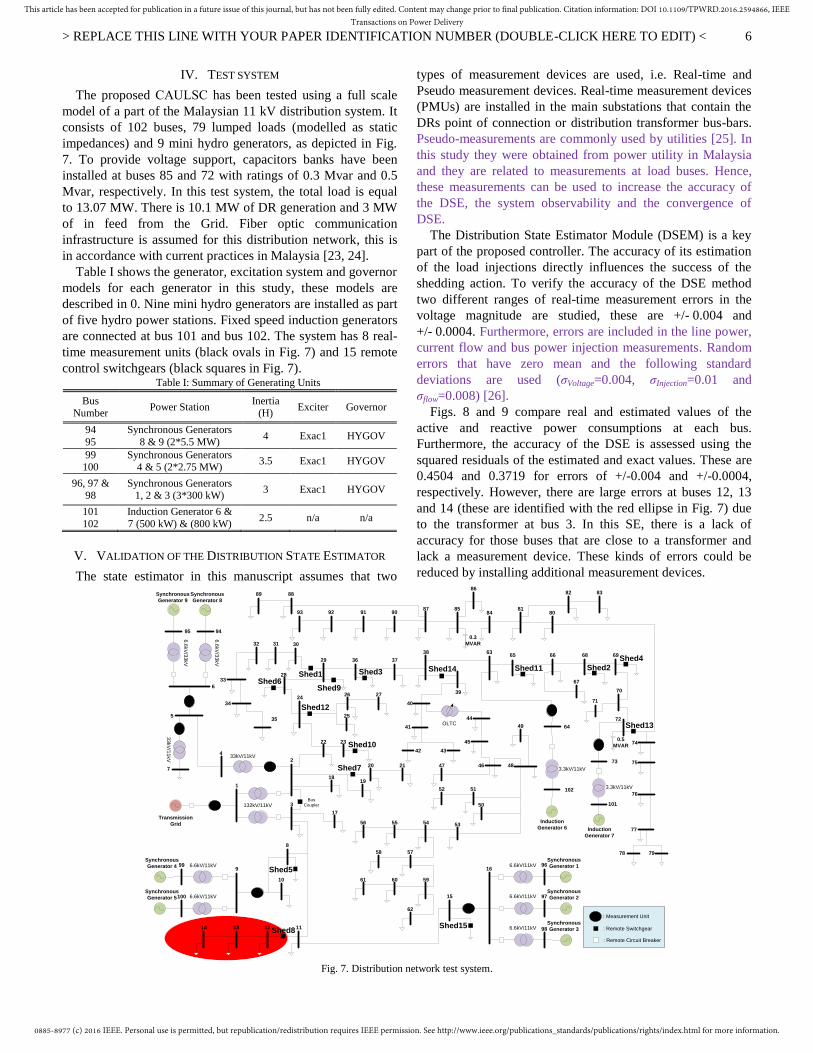
IV. TEST SYSTEM
The proposed CAULSC has been tested using a full scale
model of a part of the Malaysian 11 kV distribution system. It
consists of 102 buses, 79 lumped loads (modelled as static
impedances) and 9 mini hydro generators, as depicted in Fig.
7. To provide voltage support, capacitors banks have been
installed at buses 85 and 72 with ratings of 0.3 Mvar and 0.5
Mvar, respectively. In this test system, the total load is equal
to 13.07 MW. There is 10.1 MW of DR generation and 3 MW
of in feed from the Grid. Fiber optic communication
infrastructure is assumed for this distribution network, this is
in accordance with current practices in Malaysia [23, 24].
Table I shows the generator, excitation system and governor
models for each generator in this study, these models are
described in 0. Nine mini hydro generators are installed as part
of five hydro power stations. Fixed speed induction generators
are connected at bus 101 and bus 102. The system has 8 real-
time measurement units (black ovals in Fig. 7) and 15 remote
control switchgears (black squares in Fig. 7). Table I: Summary of Generating Units
Bus Number
Power Station Inertia
(H) Exciter Governor
94
95
Synchronous Generators
8 & 9 (2*5.5 MW) 4 Exac1 HYGOV
99 100
Synchronous Generators 4 & 5 (2*2.75 MW)
3.5 Exac1 HYGOV
96, 97 & 98
Synchronous Generators 1, 2 & 3 (3*300 kW)
3 Exac1 HYGOV
101
102
Induction Generator 6 &
7 (500 kW) & (800 kW) 2.5 n/a n/a
V. VALIDATION OF THE DISTRIBUTION STATE ESTIMATOR
The state estimator in this manuscript assumes that two
types of measurement devices are used, i.e. Real-time and
Pseudo measurement devices. Real-time measurement devices
(PMUs) are installed in the main substations that contain the
DRs point of connection or distribution transformer bus-bars.
Pseudo-measurements are commonly used by utilities [25]. In
this study they were obtained from power utility in Malaysia
and they are related to measurements at load buses. Hence,
these measurements can be used to increase the accuracy of
the DSE, the system observability and the convergence of
DSE.
The Distribution State Estimator Module (DSEM) is a key
part of the proposed controller. The accuracy of its estimation
of the load injections directly influences the success of the
shedding action. To verify the accuracy of the DSE method
two different ranges of real-time measurement errors in the
voltage magnitude are studied, these are +/- 0.004 and
+/- 0.0004. Furthermore, errors are included in the line power,
current flow and bus power injection measurements. Random
errors that have zero mean and the following standard
deviations are used (σVoltage=0.004, σInjection=0.01 and
σflow=0.008) [26].
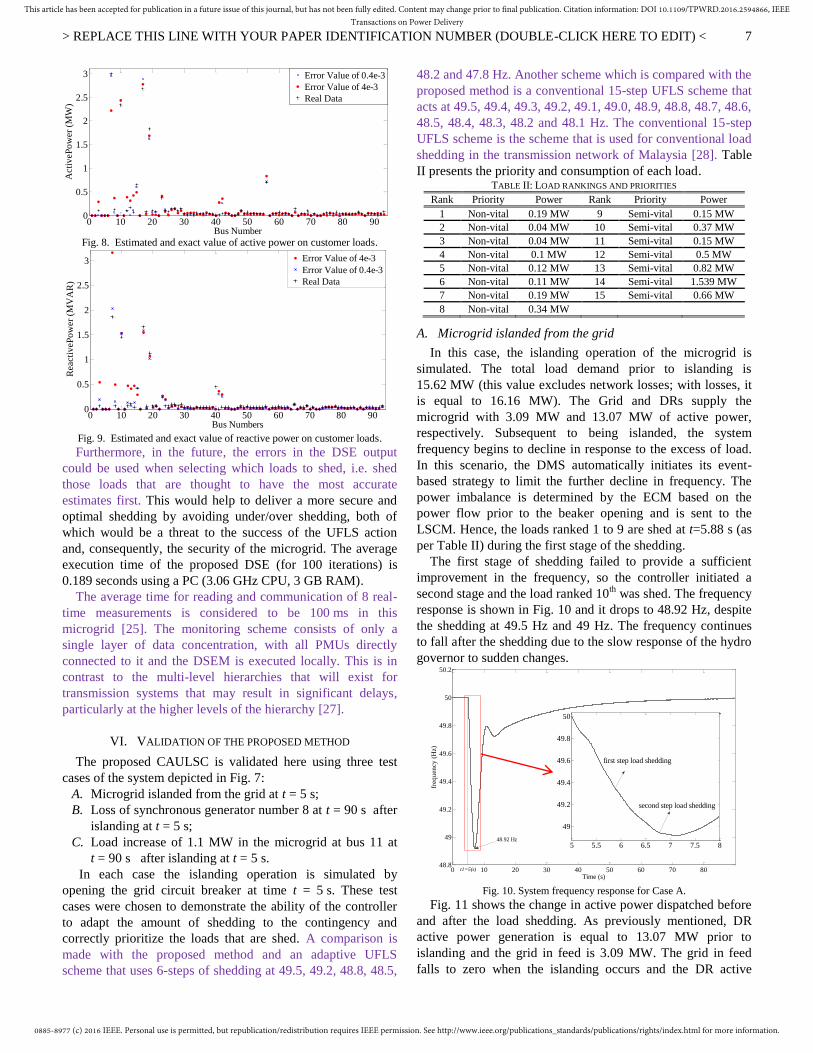
Figs. 8 and 9 compare real and estimated values of the
active and reactive power consumptions at each bus.
Furthermore, the accuracy of the DSE is assessed using the
squared residuals of the estimated and exact values. These are
0.4504 and 0.3719 for errors of +/-0.004 and +/-0.0004,
respectively. However, there are large errors at buses 12, 13
and 14 (these are identified with the red ellipse in Fig. 7) due
to the transformer at bus 3. In this SE, there is a lack of
accuracy for those buses that are close to a transformer and
lack a measurement device. These kinds of errors could be
reduced by installing additional measurement devices.
Fig. 7. Distribution network test system.
17Transmission
Grid
132kV/11kV 3
1
2
Synchronous
Generator 1
Synchronous
Generator 2
6.6kV/11kV
6.6kV/11kV
Synchronous
Generator 36.6kV/11kV
96
97
98
16
15
11121314
Synchronous
Generator 4
Synchronous
Generator 5
6.6kV/11kV
6.6kV/11kV
99
100
9
10
8
1819
20 21
22 23
24
25
28
26 27
29
303132
34
35
36 37
38
39
40
41
42 43
44
45
484647
49
50
5152
53545556
5758
596061
62
63
Induction
Generator 6
3.3kV/11kV
102
64
65 66 68
67
69
70
71
72
3.3kV/11kV
101
73
87909192
77
78 79
76
75
74
Induction
Generator 7
8081
8485
93
82 8386
8889Synchronous
Generator 8
Synchronous
Generator 96
.6kV
/33
kV
6.6
kV
/33
kV
9495
6
5
33
kV
/11kV
7
33kV/11kV
33
Shed7
Shed10
Shed12
Shed6Shed1 Shed3
Shed13
Bus
Coupler
Shed11 Shed2
Shed4
Shed14
Shed8Shed15
Shed5
4
: Measurement Unit
: Remote Switchgear
: Remote Circuit Breaker
0.3
MVAR
0.5
MVAR
OLTC
Shed9
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
7
Fig. 8. Estimated and exact value of active power on customer loads.
Fig. 9. Estimated and exact value of reactive power on customer loads.
Furthermore, in the future, the errors in the DSE output
could be used when selecting which loads to shed, i.e. shed
those loads that are thought to have the most accurate
estimates first. This would help to deliver a more secure and
optimal shedding by avoiding under/over shedding, both of
which would be a threat to the success of the UFLS action
and, consequently, the security of the microgrid. The average
execution time of the proposed DSE (for 100 iterations) is
0.189 seconds using a PC (3.06 GHz CPU, 3 GB RAM).
The average time for reading and communication of 8 real-
time measurements is considered to be 100 ms in this
microgrid [25]. The monitoring scheme consists of only a
single layer of data concentration, with all PMUs directly
connected to it and the DSEM is executed locally. This is in
contrast to the multi-level hierarchies that will exist for
transmission systems that may result in significant delays,
particularly at the higher levels of the hierarchy [27].
VI. VALIDATION OF THE PROPOSED METHOD
The proposed CAULSC is validated here using three test
cases of the system depicted in Fig. 7:
A. Microgrid islanded from the grid at t = 5 s;
B. Loss of synchronous generator number 8 at t = 90 s after
islanding at t = 5 s;
C. Load increase of 1.1 MW in the microgrid at bus 11 at
t = 90 s after islanding at t = 5 s.
In each case the islanding operation is simulated by
opening the grid circuit breaker at time t = 5 s. These test
cases were chosen to demonstrate the ability of the controller
to adapt the amount of shedding to the contingency and
correctly prioritize the loads that are shed. A comparison is
made with the proposed method and an adaptive UFLS
scheme that uses 6-steps of shedding at 49.5, 49.2, 48.8, 48.5,
48.2 and 47.8 Hz. Another scheme which is compared with the
proposed method is a conventional 15-step UFLS scheme that
acts at 49.5, 49.4, 49.3, 49.2, 49.1, 49.0, 48.9, 48.8, 48.7, 48.6,
48.5, 48.4, 48.3, 48.2 and 48.1 Hz. The conventional 15-step
UFLS scheme is the scheme that is used for conventional load
shedding in the transmission network of Malaysia [28]. Table
II presents the priority and consumption of each load. TABLE II: LOAD RANKINGS AND PRIORITIES
Rank Priority Power Rank Priority Power
1 Non-vital 0.19 MW 9 Semi-vital 0.15 MW
2 Non-vital 0.04 MW 10 Semi-vital 0.37 MW
3 Non-vital 0.04 MW 11 Semi-vital 0.15 MW
4 Non-vital 0.1 MW 12 Semi-vital 0.5 MW
5 Non-vital 0.12 MW 13 Semi-vital 0.82 MW
6 Non-vital 0.11 MW 14 Semi-vital 1.539 MW
7 Non-vital 0.19 MW 15 Semi-vital 0.66 MW
8 Non-vital 0.34 MW
A. Microgrid islanded from the grid
In this case, the islanding operation of the microgrid is
simulated. The total load demand prior to islanding is
15.62 MW (this value excludes network losses; with losses, it
is equal to 16.16 MW). The Grid and DRs supply the
microgrid with 3.09 MW and 13.07 MW of active power,
respectively. Subsequent to being islanded, the system
frequency begins to decline in response to the excess of load.
In this scenario, the DMS automatically initiates its event-
based strategy to limit the further decline in frequency. The
power imbalance is determined by the ECM based on the
power flow prior to the beaker opening and is sent to the
LSCM. Hence, the loads ranked 1 to 9 are shed at t=5.88 s (as
per Table II) during the first stage of the shedding.
The first stage of shedding failed to provide a sufficient
improvement in the frequency, so the controller initiated a
second stage and the load ranked 10th
was shed. The frequency
response is shown in Fig. 10 and it drops to 48.92 Hz, despite
the shedding at 49.5 Hz and 49 Hz. The frequency continues
to fall after the shedding due to the slow response of the hydro
governor to sudden changes.
Fig. 10. System frequency response for Case A.
Fig. 11 shows the change in active power dispatched before
and after the load shedding. As previously mentioned, DR
active power generation is equal to 13.07 MW prior to
islanding and the grid in feed is 3.09 MW. The grid in feed
falls to zero when the islanding occurs and the DR active
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5
2
2.5
3
Bus Number
Act
iveP
ow
er (
MW
)
Error Value of 0.4e-3
Error Value of 4e-3
Real Data
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5
2
2.5
3
Bus Numbers
Rea
ctiv
ePo
wer
(M
VA
R)
Error Value of 4e-3
Error Value of 0.4e-3
Real Data
0 10 20 30 40 50 60 70 8048.8
49
49.2
49.4
49.6
49.8
50
50.2
Time (s)
freq
uen
cy (
Hz)
48.92 Hz
t1=5(s)
5 5.5 6 6.5 7 7.5 8
49
49.2
49.4
49.6
49.8
50
first step load shedding
second step load shedding

0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
8
power generation is increased to compensate. The LSCM
sheds 1.66 MW of load in two steps, as in Fig. 11.
Fig. 11. DR and grid active power generation for Case A.
B. Loss of synchronous generator after islanding
The loss of one generator (DR 8) is simulated at t2 = 90s
when the system was islanded, as described in Case A. The
frequency response is shown in Fig. 12. After the generation
loss, the ECM detects the event and the DMS disconnects the
loads ranked 11 through to 14 in the first stage of shedding
and the load ranked 15th
in the second stage of shedding, the
loads ranked 1 to 10 were previously disconnected in Case A.
The minimum system frequency after the disturbance was 48.9
Hz and it returned to above 49.5 Hz within 5 seconds.
Fig. 13 presents the active power generation of the DRs in
the microgrid. After the generator trips (DR 8 at t2 = 90 s) the
active power generation of the DRs in the microgrid is
11.09 MW. When DR 8 is tripped the distribution network
loses 4.18 MW of its active power generation (around 30% of
the microgrid load). The loss of so much generation has a
significant impact on the operation of the islanded microgrid.
A comparison of the proposed scheme with the adaptive 6-
step UFLS scheme and the conventional 15-step UFLS
scheme are shown in Fig. 14. The proposed scheme limits the
frequency deviation after the islanding event to 48.92 Hz,
whereas the adaptive 6-step and conventional 15-step UFLS
allow deviations of 48.78 Hz and 48.59 Hz, respectively. After
the generator trip (DR 8 at t2 = 90s), system frequency falls to
48.9, 48.11 and 47.60 Hz for the proposed, adaptive and
conventional load shedding schemes, respectively. The
amount of load shed for each method is presented in Table III.
Fig. 15 shows the system frequency versus ROCOF for the
simulation time period. It can be seen that for both large
disturbances the CAULSC takes an effective control action
when the system frequency goes below 49.5 Hz (frequencies
less than 49.5 Hz are marked in red in this figure) and the
system frequency returns to the acceptable range. TABLE III: LOAD SHEDDING FOR CASE B
Cases Power
Imbalance
Proposed Load
Shedding
Scheme
Load
Shedding
(6-Step)
Load
Shedding
(15-Step)
Islanding
event 3.09 MW 1.66 MW 1.8 MW 1.28 MW
Generator
tripping 4.18 MW 3.67 MW 3.519 MW 4.04 MW
Fig. 12. System frequency response for Case B.
Fig. 13. Active power generation for Case B.
Fig. 14. Comparison of system frequency response.
Fig. 15. System frequency and ROCOF for Case B, the yellow planes mark
the security limits of the microgrid frequency.
0 10 20 30 40 50 60 70 800
2
4
6
8
10
12
14
16
Time (s)
Act
ive
Po
wer
(M
W)
P = 3.09 MW
P = 14.31 MW
fisrt step load
shedding
P = 13.07 MW
second step
load shedding
0 20 40 60 80 100 120 140 160 18048.8
49
49.2
49.4
49.6
49.8
50
50.2
Time (s)
freq
uen
cy (
Hz)
48.9 Hz
t1=5(s) t2=90(s)
DR tripping
0 20 40 60 80 100 120 140 160 1800
2
4
6
8
10
12
14
16
Time (s)
Act
ive
Po
wer
(M
W)
DRs Active Power
Grid Active Power
11.09 MW
t2=90(s)t1=5(s)
14.31 MW
90 90.5 91 91.5
49
49.2
49.4
49.6
49.8
50
Time (s)
freq
uen
cy (
Hz) first step load shedding
second step load shedding
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
9
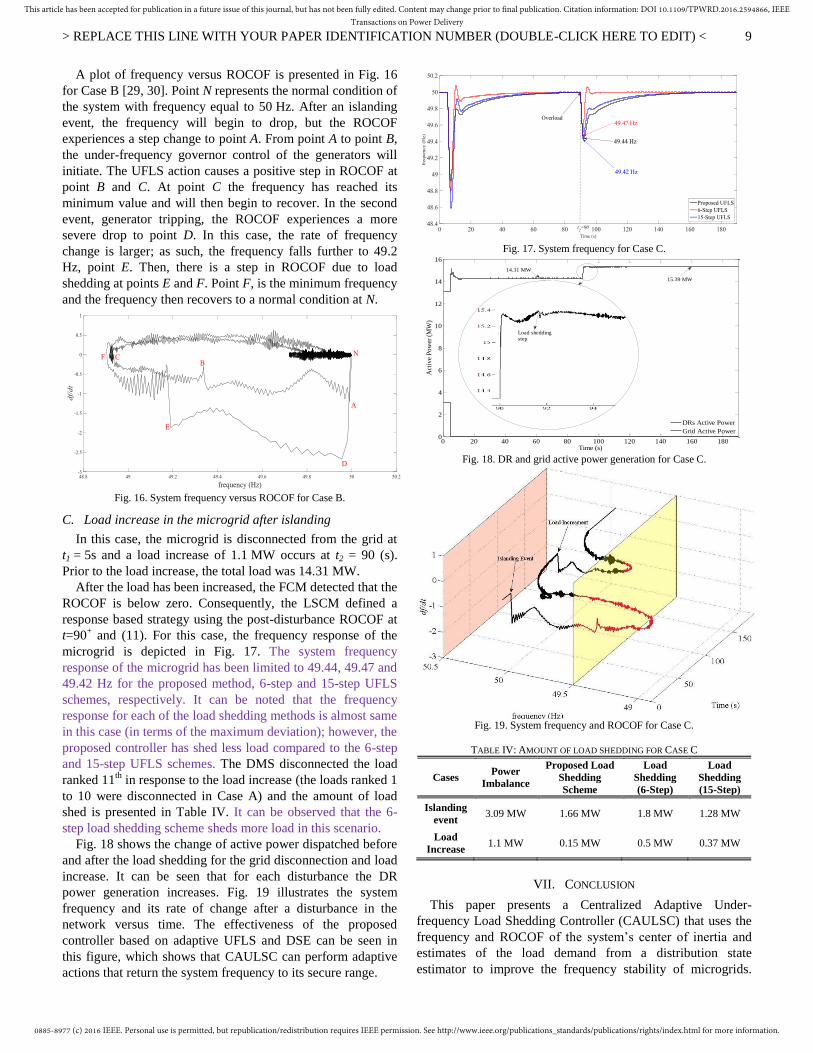
A plot of frequency versus ROCOF is presented in Fig. 16
for Case B [29, 30]. Point N represents the normal condition of
the system with frequency equal to 50 Hz. After an islanding
event, the frequency will begin to drop, but the ROCOF
experiences a step change to point A. From point A to point B,
the under-frequency governor control of the generators will
initiate. The UFLS action causes a positive step in ROCOF at
point B and C. At point C the frequency has reached its
minimum value and will then begin to recover. In the second
event, generator tripping, the ROCOF experiences a more
severe drop to point D. In this case, the rate of frequency
change is larger; as such, the frequency falls further to 49.2
Hz, point E. Then, there is a step in ROCOF due to load
shedding at points E and F. Point F, is the minimum frequency
and the frequency then recovers to a normal condition at N.
Fig. 16. System frequency versus ROCOF for Case B.
C. Load increase in the microgrid after islanding
In this case, the microgrid is disconnected from the grid at
t1 = 5s and a load increase of 1.1 MW occurs at t2 = 90 (s).
Prior to the load increase, the total load was 14.31 MW.
After the load has been increased, the FCM detected that the
ROCOF is below zero. Consequently, the LSCM defined a
response based strategy using the post-disturbance ROCOF at
t=90+ and (11). For this case, the frequency response of the
microgrid is depicted in Fig. 17. The system frequency
response of the microgrid has been limited to 49.44, 49.47 and
49.42 Hz for the proposed method, 6-step and 15-step UFLS
schemes, respectively. It can be noted that the frequency
response for each of the load shedding methods is almost same
in this case (in terms of the maximum deviation); however, the
proposed controller has shed less load compared to the 6-step
and 15-step UFLS schemes. The DMS disconnected the load
ranked 11th
in response to the load increase (the loads ranked 1
to 10 were disconnected in Case A) and the amount of load
shed is presented in Table IV. It can be observed that the 6-
step load shedding scheme sheds more load in this scenario.
Fig. 18 shows the change of active power dispatched before
and after the load shedding for the grid disconnection and load
increase. It can be seen that for each disturbance the DR
power generation increases. Fig. 19 illustrates the system
frequency and its rate of change after a disturbance in the
network versus time. The effectiveness of the proposed
controller based on adaptive UFLS and DSE can be seen in
this figure, which shows that CAULSC can perform adaptive
actions that return the system frequency to its secure range.
Fig. 17. System frequency for Case C.
Fig. 18. DR and grid active power generation for Case C.
Fig. 19. System frequency and ROCOF for Case C.
TABLE IV: AMOUNT OF LOAD SHEDDING FOR CASE C
Cases Power
Imbalance
Proposed Load
Shedding
Scheme
Load
Shedding
(6-Step)
Load
Shedding
(15-Step)
Islanding
event 3.09 MW 1.66 MW 1.8 MW 1.28 MW
Load
Increase 1.1 MW 0.15 MW 0.5 MW 0.37 MW
VII. CONCLUSION
This paper presents a Centralized Adaptive Under-
frequency Load Shedding Controller (CAULSC) that uses the
frequency and ROCOF of the system’s center of inertia and
estimates of the load demand from a distribution state
estimator to improve the frequency stability of microgrids.
0 20 40 60 80 100 120 140 160 1800
2
4
6
8
10
12
14
16
Time (s)
Act
ive
Po
wer
(M
W)
DRs Active Power
Grid Active Power
14.31 MW
15.39 MW
Load sheddingstep
0885-8977 (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRD.2016.2594866, IEEETransactions on Power Delivery
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
10
CAULSC estimates the power imbalance in the system to
adapt the amount of load shedding to the severity of the
contingency. Furthermore, it selects the loads to be shed based
on the priority of the loads, i.e. it sheds low priority loads first.
A distribution state estimator (DSE) is used here to
overcome the dependency of existing microgrid adaptive load
shedding schemes on the extensive deployment of new
measurement devices. The results presented in Section V
suggest that the accuracy of contemporary DSE methods,
when supported by very few measurements, will be sufficient
to provide the necessary accuracy for the proposed controller,
even in the presence of high levels of errors. The DSE used
here is applicable for mini-hydro type DR, which have a
slower response than most other DR. However, significant
work is required in the field of DSE to address the issues of
intermittency and the fast response of inverter based DR.
The case studies presented show that CAULSC successfully
protects the microgrid from dangerous frequency deviations
by selecting a suitable level of shedding for both a generation
loss and a load increase after the islanding of the microgrid.
Future work on adapting the total load shed and more
intelligent ways to set the shed levels of each stage are
recommended for microgrids load shedding. It is likely that
the nature of microgrids will mean that these approaches will
need to differ from those used at the bulk transmission level.
However, given the scale of the research undertaken in the
field of UFLS for transmission systems, an essential aspect of
this future work will be understanding the extent to which the
previous learning can be applied to microgrids.
If microgrids are to form an effective part of modern power
systems then it is vital that they can survive being islanded
from the main grid and continue to operate in a secure fashion
after the loss of their grid connection. Adaptive controllers,
like the proposed CAULSC, implemented in the distribution
management system will play a key role in achieving this.
REFERENCES
[1] J. Tang, J. Liu, F. Ponci, and A. Monti, "Adaptive load shedding based on combined frequency and voltage stability assessment using
synchrophasor measurements," Power Systems, IEEE Transactions on,
vol. 28, pp. 2035-2047, 2013. [2] "IEEE Recommended Practice for Utility Interface of Photovoltaic
(PV) Systems," IEEE Std 929-2000, 2000.
[3] "IEEE standard for interconnecting distributed resources with electric power systems," New York, NY: Institute of Electrical and Electronics
Engineers, 2003.
[4] V. V. Terzija, "Adaptive underfrequency load shedding based on the magnitude of the disturbance estimation," Power Systems, IEEE
Transactions on, vol. 21, pp. 1260-1266, 2006.
[5] V. Terzija and H. Koglin, "Adaptive underfrequency load shedding integrated with a frequency estimation numerical algorithm," in
Generation, Transmission and Distribution, IEE Proceedings-, 2002,
pp. 713-718. [6] D. Xu and A. A. Girgis, "Optimal load shedding strategy in power
systems with distributed generation," in Power Engineering Society
Winter Meeting, 2001. IEEE, 2001, pp. 788-793. [7] J. Bogovic, U. Rudez, and R. Mihalic, "Probability-based approach for
parametrisation of traditional underfrequency load-shedding schemes,"
Generation, Transmission & Distribution, IET, vol. 9, pp. 2625-2632, 2015.
[8] D. Hazarika and A. Sinha, "Method for optimal load shedding in case
of generation deficiency in a power system," International Journal of Electrical Power & Energy Systems, vol. 20, pp. 411-420, 1998.
[9] P. Wang and R. Billinton, "Optimum load-shedding technique to
reduce the total customer interruption cost in a distribution system," in Generation, Transmission and Distribution, IEE Proceedings-, 2000,
pp. 51-56.
[10] F. Shokooh, J. Dai, S. Shokooh, J. Tastet, H. Castro, T. Khandelwal, et al., "Intelligent load shedding," IEEE Industry Applications Magazine,
vol. 2, pp. 44-53, 2011.
[11] F. Shokooh, J. Dai, S. Shokooh, J. Taster, H. Castro, T. Khandelwal, et al., "An intelligent load shedding (ILS) system application in a large
industrial facility," in Industry Applications Conference, 2005.
Fourtieth IAS Annual Meeting. Conference Record of the 2005, 2005, pp. 417-425.
[12] D. Andersson, P. Elmersson, A. Juntti, Z. Gajic, D. Karlsson, and L.
Fabiano, "Intelligent load shedding to counteract power system instability," in Transmission and Distribution Conference and
Exposition: Latin America, 2004 IEEE/PES, 2004, pp. 570-574.
[13] U. Rudez and R. Mihalic, "Monitoring the first frequency derivative to improve adaptive underfrequency load-shedding schemes," Power
Systems, IEEE Transactions on, vol. 26, pp. 839-846, 2011.
[14] U. Rudez and R. Mihalic, "Analysis of underfrequency load shedding
using a frequency gradient," Power Delivery, IEEE Transactions on,
vol. 26, pp. 565-575, 2011.
[15] M. Karimi, H. Mohamad, H. Mokhlis, and A. Bakar, "Under-frequency load shedding scheme for islanded distribution network connected with
mini hydro," International Journal of Electrical Power & Energy
Systems, vol. 42, pp. 127-138, 2012. [16] F. C. Schweppe and J. Wildes, "Power system static-state estimation,
Part I: Exact model," Power Apparatus and Systems, IEEE Transactions on, pp. 120-125, 1970.
[17] F. C. Schweppe and D. B. Rom, "Power system static-state estimation,
Part II: Approximate model," power apparatus and systems, ieee transactions on, pp. 125-130, 1970.
[18] F. Schweepe, "Power System Static State Estimation, Part III:
Implementation," ed: IEEE Transaction on Power Apparatus and Systems, 1970.
[19] D. Thukaram, J. Jerome, and C. Surapong, "A robust three-phase state
estimation algorithm for distribution networks," Electric Power Systems Research, vol. 55, pp. 191-200, 2000.
[20] G. Valverde, A. T. Saric, and V. Terzija, "Stochastic monitoring of
distribution networks including correlated input variables," IEEE transactions on power delivery, vol. 28, pp. 246-255, 2013.
[21] P. Wall and V. Terzija, "Simultaneous estimation of the time of
disturbance and inertia in power systems," Power Delivery, IEEE Transactions on, vol. 29, pp. 2018-2031, 2014.
[22] M. Giroletti, M. Farina, and R. Scattolini, "A hybrid frequency/power
based method for industrial load shedding," International Journal of Electrical Power & Energy Systems, vol. 35, pp. 194-200, 2012.
[23] "Technical Guidebook for the Connection of Generation to the
Distribution Network," TNB Research Sdn. Bhd., 2005. [24] Smart Grid Communications Requirements Report 10-05-2010.
Available:
http://energy.gov/sites/prod/files/gcprod/documents/Smart_Grid_Communications_Requirements_Report_10-05-2010.pdf
[25] B. Naduvathuparambil, M. Valenti, and A. Feliachi, "Communication
delays in wide-area measurement systems," in Southeastern Symposium
on System Theory, 2002, pp. 118-122.
[26] L. Zhao and A. Abur, "Multi area state estimation using synchronized
phasor measurements," IEEE Transactions on Power Systems, vol. 20, pp. 611-617, 2005.
[27] "IEEE Standard for Synchrophasor Data Transfer for Power Systems,"
IEEE Std C37.118.2-2011 (Revision of IEEE Std C37.118-2005), pp. 1-53, 2011.
[28] A. Zin, H. M. Hafiz, and M. Aziz, "A review of under-frequency load
shedding scheme on TNB system," in Power and Energy Conference, 2004. PECon 2004. Proceedings. National, 2004, pp. 170-174.
[29] V. Chuvychin, N. Gurov, S. Venkata, and R. Brown, "An adaptive
approach to load shedding and spinning reserve control during underfrequency conditions," Power Systems, IEEE Transactions on,
vol. 11, pp. 1805-1810, 1996.
[30] U. Rudez and R. Mihalic, "Predictive underfrequency load shedding scheme for islanded power systems with renewable generation,"
Electric Power Systems Research, vol. 126, pp. 21-28, 2015.




























