-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
1/8
I12 IEEE TRANSACTIONS O N INDUSTRIAL ELECTRONICS, VOL. 39, NO. 2
, APRIL 1992
A Phase/Frequency-Locked Controller forStepping Servo Control
Systems
Jung-Chien Li and Guan-Chyun Hsieh , Member, IEEE
Abstract-A phase-controlled oscillator (PCO), composed ofan
adaptive digital-pumped controller (ADPC) and a voltage-controlled
oscillator (VCO), is proposed as a novel steppingmotor driver.
Therefore, a phase-locked stepping servomecha-nism (PLSS) is
established and the PC O can provide an accurateand stable pulse
train to adaptively drive the stepping motor.System modeling,
analysis, stability investigation, design, andimplementation are
all conducted. Computer simulation andexperiment result indicate
that the performance of the PL SS isclose to the theoretical
prediction. Some speed responses for40-1000 r/min are examined in
the real PLSS. A good speedregulation of kO.15 r/min is achieved.
An adaptive line densityselector can be used t o improve the system
performance.I . INTRODUCTION
ECENT LY the stepping servomechanism plays an im-R ortant role
due to the demand for speed and positioncontrol. It performs
especially well in the low-speed range.The driving signal for the
stepping motor is a train of pulses,which is easily combined with
the digital system. The devel-opment of the microprocessor makes
this servo system per-form better. However, most of the control
strategies up todate usually use the digital code as the reference
input. Inorder to achieve a better and more reliable performance,
thecontroller design must be more complicated.This paper proposes a
phase-controlled oscillator (PCO) asthe controller for the
phase-locked stepping servomechanism(PLSS), based on the
phase-locked technique with real-timeadaptive control capability.
The PCO controller consists ofan adaptive digital-pumped controller
(ADPC) [4] and avoltage-controlled oscillator (VCO) The PCO
provides aphase-locked range of [ -2 n , 2n1, within which the
associ-ated train of pulses will be used as the driving signal for
thePLSS.Because the PCO controller employs the multirate sam-pling
technique with the linear quantization property, thespeed of the
servo system can be linearly and stably con-
trolled. Because the phase-locked technique can provide avery
wide lock-in range, the VCO does not have to provide aconstant
control profile. It can adaptively provide the opti-mum control
signal. This phase-locked servo system provesto be adaptive,
accurate, reliable, and practical.The param eters considered are
multisampling rate N,um pvoltage P, ampling period T , and VCO gain
K ,. Thispaper employs the Laplace and z transformations for
PLSSsimulation and analy sis [ 5 ] . In stability analysis, the
system iscomplicated since the stepping motor is at least of
secondorder. Consequently, the computer-aided graphical methodcan
be used for controller design. We propose a practicalexample to
verify the simulation result. The speed range ofthe presented PLSS
lies in 40-1000 r/min where a speedregulation of f .15 r/min is
achieved. It is obvious that thissystem contributes to the
low-speed range. It is also con-firmed that the digital
phase-locked technique [l], [4] can besatisfactorily applied to
motor speed control.
11. BASIC CHEMEF THE PC OFig. 1shows the PCO in the PLSS. The
PCO consists ofan ADPC and a VCO so that the driving frequency for
thestepping motor is proportional to the phase error. The de-tailed
ADPC scheme can be seen in [4]. If the VCO operatesin the linear
region, it can be viewed a s a constant gain K,.From [4], we have
the mathematical model of the ADPCas
T = T I NManuscript received July 15, 1991; revised November 17,
1991. Thiswork was supported by National Science Council, Taipei,
Taiwan, R.O.C.J.-C. Li is with the Department of Electronic
Engineering, NationalProject no. NSC79-0404-E011-17.
8, is the phase error, and V, is the output voltage of
theADPC.Taiwan Ocean U niversity, Keelung, Taiwan, R.O.C .Taiwan
Institute of Technology, Taipei, Taiwan, R.O.C.G.-C. Hsieh is with
the Department of Electronic Engineering, NationalIEEE Log Number
9106875.
111. MODELINGF THE STEPPING OTORFrom [lo], we have
0278-0046/92$03.00 0 992 IEEE
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
2/8
LI AND HSIEH: A PHASEIFREQUENCY-LOCKED CONTROLLER 1 I3
wiroi I II * Adaptive 1,D i g i t a l - P u m p - - t
VCOhase
I
Phase-Controlled Oscillator, PCO- 7- - - - - - - - - - - - - - -
-
1em,Stepping -Motor
-ig. 1. PCO in the PLSSk , -+ 0 leads to With the z
transformation, we obtain
L,z2 + L 2 z+ L ,( z - 1)(z2 2 D c o s ( E T ) z + D 2 )GH ( Z )
= A
where-- D
L , = 2bDEcos(ET) - 2b E + cETSince the real pole s = - / Lp
lies in the negative U axisfar from the origin, its effect can be
neglected. Thus, (4) canbe simplified as + 2 b2D in ( E T )- cD sin
( E T ) (9 )L 2 = 2bE - ~ c D E T c o s ( E T ) 2bD2E- 4b2D in ( E
T )+ 2 CD in ( E T ) ( I O )( 5 )% ( S ) - 4,D
J- -4 s ) s2 + -s + L , = cD2ET+ 2 bD2E - 2 bDE COS ( E T )+ 2
b2D in ( E T ) - cD sin ( E T ) . (1 1)Equation (5) may be
rewritten as The forward gain isK m-- TNPK,K, 1 - e p s TG(s )= .
(12)(6)s ) -&(s) s2+ 2bs + c 2 a s(s2 + 2bs + C )
whereb =the parameter related to the rotational inertia andC =th
e magnetic and electric parameter.Km/c =th e dc gain of the
stepping motor, including the
With the z transformation, we obtainN J + N2G ( z )= - 2- 2 D c
o s ( E T ) z+ D2viscous braking coefficient.
where27r factor.f; =the input frequency.U , =the output
speed.
N, E - DE co s ( E T )- bD sin ( E T )N2 = D2 E- DE co s ( E T )
+ bD sin ( E T ) . (14)(15)
Thu s, the closed -loop transfer fu nction will beIV .
MATHEMATICALnalysis of the PLSSphase error, i.e ., in the
phase-locked range. The linearequivalent model can then be derived
as Fig. 2 [4], where nnumber of pulses produced by the optical
encoder during onerevolution of the step ping motor.
G (4-uppose that the system is in the steady state with smallis
the line density of the optical encoder, which denotes the
4 2)T ( z )=-, ( z ) - 1 + G H ( z )
A C ( Z 1) N , z + N2- n ( Z 3 + Qiz2 Q z Z e3From Fig. 2, we
have the loop gain wherenTNPK,K, 1 - e p s T Q , = 2 AbDE co s ( E
T )+ AcET + 2 Ab2 D in ( E T )
- 2AbE - AcDs in(ET) - 2 D c o s ( E T ) - 1 (17)H ( s ) = . ( 7
)2 n s2(s2+ 2bs + C )
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
3/8
114 IEEE TRANSACTIONS ON INDUST RIAL ELECTRONICS, VOL. 39 , NO.
2 , APRIL 1992
Fig. 2. Linear equivalent model of the PLSS.
Q2 = 2 AbE - 2 AcDETcos ( E T )- 4Ab2D in ( E T )+D2 - 2 AbD2E+
2 AcD sin ( E T )+ 2 D co s ( E T )(18)
Q3 2 AbD2E - D2 - 2 AbDE cos ( E T )+ AcD2ET+ 2 Ab2D in ( E T )
- Ac D sin ( E T ) (19)and
(20)( 2 1 )
1 / 2E = ( e - b 2 )D = e - b Tn TNPK K ,A = 2c2En '
Now consider the characteristic equation 1 + G H (z ) = 0 ,which
leads toz3+ [2AbDEcos(ET)- 2AbE
+AcET + 2 Ab2D in ( E T )-Ac D sin ( E T ) - 2D co s ( E T ) -
11z 2+ [2AbE - 2 AbD2E+ D2- 2 AcDET co s ( E T )- 4 A b 2 D s i n (
E T ) + 2 D c o s ( E T )+2 AcD sin ( E T ) ]+ [ -D2 + 2 AbD2E - 2
AbDE cos ( E T )+AcD2ET+ 2 Ab2D in ( E T ) - AcD sin ( E T ) ]
= 0. (23)In order to consider the stability of the PLSS, we
employ thebilinear transformation z = (1 + s)/(l - s) with T =2 n /
n w and then apply the Routh-Hurwitz criterion. There-fore.
u0s3+ U,? + u 2 s+ U, = 0 (24)
whereU, = 2 - BcE/nw - [BcDEcos (E /n w) ]/ nw
-4BbD2E + 2D2-BcD2E/nw+ 4BbE + 4 0 cos (E l nu )- 8 B b 2 D s i
n ( E / n o ) + 4BcDsin (E/nw)> 0 (25)
( B = NPK,K, /2c2Enw)U , = 4 - BcE/nw + 2BcDEcos (E /n w) /n w+
8BbD2E
- 8BbDEcos (E ln w )+ 3BcD2E/nw- 40 '+8Bb2Dsin (E/nw)- 4BcDsin
(E/nw)> 0
(26)U, = BcE/nw + [2BcDEcos (E /n o) ] / nw
- 3BcD2E/nw- 4BbE + 2 - 4BbD2E+ 2D2 - 4Dcos (E ln u)+8BbDEcos (E
ln w) > 0 (27)U, = BcE/nw - [2BcDEcos (E/ nw )] /n w+ BcD2E/nw
> 0 (28)
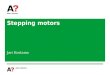
U,U? u,q. (29)For a given n , we can compute U,, U , , U,, U,,
andU ,U 2- U,U, as functions of U . Using (25)-(29),we candetermine
U,,, above which the system is stable. Fig. 3illustrates this
computation for n = 200/32 = 6.25. It isclearly seen that U,," =
165 r/min for n = 6.25. Therefore,we can compute U,,, as a function
of n fo r n = 6.25, 12.5,25 , 50, 100, and 200. Fig. 4 shows this
result. It can beobserved that the larger the line density n , the
lower theminimum speed U,,, that ensures the stable operation.
Now consider a phase ramp input O,(t)= Rtu,(t) for(16).From [ 5
] , this is a type 1 system, and the steady-stateerror isRess= -K
,
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
4/8
LI
100
Stab le region
I ! / , / , /[60 -40
AND HSIEH: A PHASEJFREQUENCY-LOCKED CONTROLLER
3
0-1-2 -- 3 -
-
- 4
- 5 --
0 20 4 0 G O 00 100 120 140 1 G O I 8 0o ( r pn i )
Fig. 3 . Computation of U,,,," for n = 6.25
11s
nFig. 4 . U,,, versus n
where and circuit hardware. The software is written by the Turbo
Clanguage. Its main functions include accept and display speed,read
the speed, etc. As to the PC O controller, we may selectthe device
and hardware design according to the specifica-tions such as speed
resolution, maximum overshoot, steady-state error, rise time, and
settling time.Speed resolution is determined by the jump voltage P
. Th esensitivity of T (z ) with respect to P is
1T z-*1K , = - im [ ( z - l ) G H ( z)]
(3 1)Constant steady-state phase error means zero
steadystatespeed error .
- A (& + L2 + L3)T[l + D 2 2 D c o s ( E T ) ] '
V . PLSS DESIGNThe objective of this system is to investigate
the control ofthe motor speed. The stepping motor is a nonlinear
devicewith high orders. This system contains computer software
where T(z) = N ( z ) / D ( z ) c"X from (16). T%en
z3+ [ - 1 - 2 D c o s ( E T ) ] z 2 + [ D 2 + D c o s ( E T ) ]
z - D2z3+ Q , z 2+ Q 2 z+ Q3s ,T'z) = (33)
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
5/8
I I6 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 39, NO.
2, APRIL 1992
The speed variation is directly affected by P. P must beselected
for the motor input frequency to vary within f Hzrange. The product
NP determines the maximum outputvoltage of the ADPC, which is
normally between 5 and30 V.In designing the PCO, the selection of N
nd P is veryimportant. After the two parameters are determined
accord-ing to the design procedure, we sub stitute them into
thetransfer function to check if the system response satisfies
thespecificatio ns. If not, we sea rch anoth er set of N and
Pvalues until the specif ications are met.The PLSS design procedure
can be stated as follows.
Step 1) Determine the maximum range of the PCOoutput frequency
according to the steppingmotor parameters, system speed range,
step-ping motor and driver gain K,, and VCOgain K , .Choose the
possible line density n. Determinewmin according to Fig. 3. Compute
Tma,2 n / n u m i nIn step 1, the maximum output voltage of theADPC
is the product NP, here P is deter-mined by the permissible motor
speed varia-tion during each pumping period TIN. heforward gain of
the servo system can be de-fined as
Step 2)
Step 3)
NPK,K,2 n c (34)dc =
Therefore, the speed can be derived asw = Gdc8e (35)
where2x"N8 e = -.
For minimum 8e , we have N' = 1 and the jump voltage P.Thus, the
speed jump is
which shows that A w is proportional to P. N can bedetermined by
P and NP.The controller parameters can be derived fromstep 1 to
step 3. With the derived steppingmotor and controller, design the
phase compara-tor, ADPC, VCO, waveshaping circuit, and thehardware
circuit of the com puter interface.The controller parameters
computed from step 1to step 3 are used as the data for
computersimulation. We can do the ex periment with step4, and find
the optimum line density n .Step 6) The computer simulation of the
PLSS can bestated as:Step 6-1)Use P, N, , K,, K,, b, c , and n
tocompute the closed-loop transfer function from(16).
Step 4)
Step 5)
Step 6-2) We use the phase-ramp input to simulate thespeed
response and compare with the systemrequirements, such as speed
resolution, maxi-mum overshoot, settling time, and
steady-stateresponse.Step 6-3) If the specifications can be met,
the design isfinished. Otherwise, we return to step 1 andrepeat
again.VI. D ESIG N xample, Simulation, and Experiment
Suppose that the parameters of the stepping motor areb = 30
rad/s and c = 2000 (rad/s)*. There are 200 steps foreach rotation.
Now the system employed is half-step excita-tion and the driver and
stepping motor dc gain is Km c =(2n /400) = 0.0157. Th at is, when
a frequency of 400 Hz isused as the input, the motor will rotate at
a speed of 1 r/s. Inthe hardware used, the optical encoder produces
200 pulsesduring one rotation. Thus the maximum line density is n
=200. The PCO requires that when we have a phase-rampinput, the
steady-state error should be less than 2%, themaximum overshoot be
less than l o % , rise time be less than2 s, settling time be less
than 3 s, permissible speed jump beless than 0.0471 rad /s, and
speed range be 40-1000 r/min.The VCO has a gain of K, 454 Hz/V.
Consequently,the maximum output voltage of the ADPC is NP =
(1000r/min 2nrad)/(454 Hz/V * 0.0157 60) = 14.68 V. Wechoose NP o
be 15 V. PK,Km/c 0.0471 rad/s. Thenchoose P = 6m V and N =
2500.Fig. 5 shows the block diagram of the PLSS. We have
Phase comparator: It consists of the MC4044 fre-quency-phase
comparator IC and some digital logicgates. R denotes the reference
phase and V denotes thevariable phase. If R leads V , U will
produce pulseoutputs and D keeps high potential. On the other
hand,if V leads R , will produce pulse outputs and Ukeeps high
potential.Sampler: It consists of a NOT gate and a NAND gate,etc.
N3 s just the multisampling rate N. t sam ples theD (o r U,
epending on which keeps high potential)signal and provides this
sampled signal as a clock pulseto the Up terminal of the counter if
R leads V (or tothe D, terminal if V leads R) .ADPC: It is composed
of a 74193 IC counter and a12-b D/A converter AD7541. In order to
increasesystem resolution, the D/A converter used in this sys-tem
is a 12-b IC. Then w e use three 4-b 74193 countersin cascade. If
the clock pulse appears at the Up (or Dw)terminal, the counter will
count up (or down). ThenAD7541 must be power supplied by the 7812
regulationIC, which provides a stable saturation voltage of V,,,
=24.6 V. Therefore the D/A converter can provide2 '* = 4096 output
voltage levels. Thus, the jump volt-age is P = 24.6V/4096 = 6 mV as
desired.VCO and t NI:he VCO comprises LM331 VCO IC(with linear
response) and pA741 (operational ampli-fier) so that better
resolution can be achieved. Thecontrol voltage of the VCO is
designed at 0.02V (for
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
6/8
LI AN D HSIEH: A PHASE/FREQUENCY-LOCKED CONTROLLER 117
7 4 , 9 i I 7 4 7 6
I T + "1 S T E P P I XMOTOR(U. - -+ Ni + N I MICROPRGCESSOR
DRIVER -1U. ____c < ( U ,P ~ I Ms 8n .x I 10 3 8932 OIEZP C / 4
T X2SS4 1 9 3 1 7 4 7 6~
F l L P - F O L PGSC
D I G I T A LMO D IFIER *
k M Hz 7 4 7 6
Fig. 5 . Block diagram of the PLSS where N , = 10, N 2 = 30-320,
andN3 = 20-50.
171 Hz output frequency) - 16.03V (for 72.83 kHzoutput
frequency). In order to operate with the steppingmotor, a frequency
divider circuit ( +N , , N, 10) isincluded that consists of 74193
and 7476. Thus, K , =5) Driver: It is PMM-CS-803C-1. We need only
providethe pulse signal at the input terminal. It provides
half-step and two-phase excitations, clockwise (CW) andcountercloc
kwise (CCW ) rotations, etc. The drivingsignal derived from the VCO
and + N , circuit is ampli-fied and fee ds the driver inpu t
terminal.6) Stepping motor: It is a 103-89 32-01E 2 hybrid
PMstepping motor, with two-phase windings and a stepangle of
1.8"/step (200 steps constitute one rotation).
An optical encoder E680200C3J is mounted that in-cludes A and B
terminals that generate 200 pulses with90" phase difference during
one rotation, and a Cterminal that generates one pulse during one
rotation.
7) Wa veshapin g circuit: Because the stepping motor ro-tates in
a stepping manner, the vibration may occur.The pulse w aveform
generated by the optical encoder israther complicated. The
waveshaping circuit is used toimprove such a waveform. It uses
optocoupler IC'sMCT2 for noise isolation, relays for CW/C CW
isola-tion, and monostable multivibrators (one shots) withflipflops
for waveshaping.8) Microprocessor and frequency generator: The
fre-quency generator consists of an 8-MHz temperature-compensated
crystal oscillator and a programmable di-
vider, whose divisors N2 an d N 3 come from themicroprocessor.
This circuit generates the referencefrequency and the multisampling
frequency. The micro-processor related circuit includes the PC/AT,
multi-function interface cards, and a few buffers. As soon as
(72830 - 171)/(16.03 - 0.02)/10 = 454 Hz/V.
the speed command comes from the keyboard, theprogram computes
the correct N2 and N3 values,which go to the programmable divider
through ports Aand B. The optical encoder output waveforms go to
themicroprocessor through port C. The program countsthe number of
pulses during some fixed time intervaland obtains the output
speed.This system becomes unstable when the PCO is not in
thephase-locked range of [- a , + 2 a] , i .e. , when 1 0, I > 2
ain Fig. 2. From (34) and (35), 0, = 2 a l eads to w =NPK,Km/c,
hich is the upper speed limit wH, eyondwhich the system is
unstable. From the data of our example,we have wH = (PK,Km / c ) N
= (0.0471 rad/s) * 2500 =
117.75 rad/s = 1124 r/min. From Fig. 4, the lower speedlimit is
w L = 40 r/min. Thus, the speed range 40-1000r/min in our
experiment is stable, and this is the reason whywe choose these
comparatively modest operating speeds.The digital modifier provides
the freque ncy-divide r func-tion for the output waveform of the
optical encoder. Thus wehave n = 200, 100, 50, 25, 12.5 , and6.25.
W euse n = 10 0to find the suitable values of b and c for different
speedranges. Furthermore, we can find the appropriate line densityn
for different speed ranges to obtain the optimum speedresponse. The
re sult is show n in Table I.From Fig. 4, as far as the stability
is concerned, n is smallfor high-speed rotation and large for
low-speed rotation. Inorder to explain the effect of n, three
families of speedresponses for IOW-,middle-, and high-speed
rotations withadequate n's are examined and depicted in Figs. 6-8,
respec-tively. It is clearly seen that the simulation and
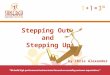
experimentresults are very close.Fig. 7 shows the speed response s
for 60-120 r/min (withn = 25 and 50) and 60-180 r/min (with n = 25
and 50),
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
7/8
118
Fig. I
IEEE TRANSACTIONSON INDUSTRIAL ELECTRONICS, VOL. 39, NO . 2,
APRIL 1992
00070 -GO504 0.30
1
for 0-60 rpmfor 0-90 rpm iSimulation : !xperiment : o o o for
0-60 rpmx for 0-90 rpm In 0.2 0. 4 0.6 0.8 1 1. 2 1.4 I . GTime
(sec)
Fig. 6 . Speed responses for 0-60 r/min and 0-90 r/min (with n =
200) .130
12 0
1 10
100
90 Simulation : ~ n = 2 5..........
Experiment : o n = 25x x x n = 5 0
0 0.2 0.4 0.6 0.8 1 1 .2 1.4 1.GTime (sec)(a)
Simulation : ~ n = 25n = 50......~~~~Experiment : o o o n =
25
x x x n = 5 0
0 0.2 0.4 0.G 0.u I 1.2 I .4 1. G
Simulation : ~ n = 25n = 50.....~Experiment : o o o n = 25
x x x n = 5 0
0 0.2 0.4 0.G 0.u I 1.2 I .4 1. GTime ( s e c )
(b)(a) Speed responses for 60-120 r/min (with n = 25 and 50). (b
) Speed responses for 60-180 r/min (with n = 25 and 50) .
-
8/3/2019 A Phase-frequency-locked Controller for Stepping Servo
Control Systems
8/8
LJ AND HSIEH: A PHASE/FREQUENCU-LOCKED CONTROLLER I19
5 0 0 , I- I45 0
400 I k IQ
a
20 0jnI ^10 0501/0
Ifor 60-360 rpmfor 60-480 rpmimulation : ___Experiment : o Q 0
for 60-360 rpm
Y x x for 60-480 rpm
5of0 0. 2 0.4 0. G 0. u 1 I .2 I .. I 1 .GT ime ( s e c )
Speed responses for 60-360 r /min and 60-480 r /min (withig. 8.
n = 6.25) .
TABLE ISUITABLE, c , A N D n
Speed Range (r /min ) b , (rad/s) C , ((radls)*) n40-60 50
15000-9000 20070-90 40 4500-2500 200120-180 30 2400- 1200
50.25210-300 20 900-500 25, 12.5
420-480 9 180- 140 6.25330-390 10 425-200 12 A6 .2 5
respectively. The steady-state speed error is less than
0.15r/min. It is clearly indicated that in each case the rise
timefor n = 25 is shorter than that for n = 50, but the
overshootfor n = 25 is larger than that for n = 50. Remarkably,
thesettling times are nearly the same. According to the
threefamilies of speed responses mentioned above, it is
concludedthat the determination of n is very important. It is found
thatfrom Figs. 6 -8 , with an adequa te selection of n, horter
risetime, smaller overshoot, and nearly the same settling timecan
be obtained over the controlled speed range. The risetimes are all
within 0.15-0.4 s, the overshoots are below5%, and the settling
times are no more than 0.7 s. As aresult, if an adaptive n selector
is carefully built according tothe speed and stability
requirements, a better performancecan be obtained in this system.
This adaptive n selector canbe easily formed by using an optical
encoder followed by aprogrammable divider.
VII. CONCLUSIONSWe have proposed a PCO, which consists of an
ADPC anda VCO. We build the mathematical model of the stepping
motor and PCO, from which N, P , T , stability investiga-tion,
and design procedure can be determined. The steady-state speed
error can be kept within kO.15 r/min over thecontrolled speed
range. The larger the line density, the lower
the minimum stable speed. Under the steady rotation condi-tion,
small line density corresponds to small rise time andlarge
overshoot. We must find the appropriate line densityunder different
speed ranges to obtain the optimum speedresponse. Therefore, an
adaptive n selector can be used.ACKNOWLEDGMENT
The authors are very grateful to R . N . Jou for his help
insimulation and experiment.REFERENCES
J . Tal, Speed control by phase-locked servo systems-new
possibilityand limitation, IEEE Trans. Ind. Electron. Contr.
Instrum., vol .IECI-24, pp. 118-125, Feb. 1977.DC M otors, Speed Co
ntrols, Servo Systems, 4th ed., EngineeringHandbook, Electro Craft
Corp., 1978.F. M . Gardner, Phaselock Techniques, 2nd ed. New York:
Wiley,1979.G. C . Hsieh , Y. P. Wu, C. H. Lee, and C. H. Liu, An
adaptivedigital pump controller for phase-locked servo systems,
IEEE Trans.Ind. Electron, vol. IE-34, pp. 379-386, Aug. 1987.B. C.
Kuo, Digital Control Systems. New York: Holt, Rinehart andWiston,
1980.I . J. Nagrath and M . Gopal, Confrol Systems Engineering. Ne
wYork: Wiley, 1982.A. Hughes and P. J . Lawrenson, Electromagnetic
damping instepping motor, IEE Proc . , vol. 122, no . 8, pp.
819-824, 1975.A. Hughes, Parameters governing the dynamic
performance ofpermanent-magnet stepping motor, in Proc . Sixth
Annual Symp o-sium of IMCSD, 1977, pp. 39-47.P . Lawrenson, A.
Hughes, and P. P. Acarnley, Starting/stoppingrates of stepping
motors, improvem ent and prediction, in Proc. Int.Conf. on Stepping
Motors and Systems, 1976, pp. 54-60.Y . K. Hsu, Principles and
Applications of Stepping Motors (inChinese). Taipei: Chuan-Hua Book
Co., 1990.J.-C. Li, G.-C. Hsieh, and R.-N. Jou, A study on stepping
servocontrol system by phase-locked technique, in Proc. IEEE I n t
.Conf. on Industrial Electronics, Control, and
Instrumentation,Kobe, Japan, Oct. 1991, pp. 366-370.