Embed Size (px)
Citation preview

Figure 4 shows the variation of I P2 I with the distance from the shell in the cross sections 01 = ~]2 (curve 1),
0 ~ = 0 (curve 2), and 0 a = 3~r/2 (curve 3). For comparison, curve 4 shows the variation of I P2 ] when there is no boundary
surface. Calculations were performed for k x R = 2n and H = 2 R. The graphs show that the period of variation of the �9
pressure ha the cross section 0~ = 3~/2 is approximately half the wavelength, in the cross section 0 1 = 0 it is 1Vz times
the wavelength, and in the cross section 0 1 = ~r/2 the character of the variation of the pressure is comparable with the case of no boundary surface.
Figure 5 illustrates the dependence of I P2 I at point A outside the surface of the shell on the dimensionless wave
number of the radiator for H = 2 R (curve 1), for H = R (curve 2), and also in the absence of a boundary (curve 3). The presence of a boundary changes both the period and magnitude of the resonances. The period and magnitude of the reso- nances increase when the shell approaches the boundary.
LITERATURE CITED
1. V.N. Buivol, Vibrations and Stability of Deformable Systems in a Fluid [in Russian], Naukova Dumka, Kiev (1975). 2. G. Watson, A Treatise on the Theory of Bessel Functions, Cambridge University, Cambridge (1948). 3. A .N. Guz' and V. T. Golovchan, Diffraction of Elastic Waves in Multiply Connected Bodies [in Russian], Naukova
Dumka, Kiev (1972). 4. V.G. Savin, I. I. Chernushenko, and N. A. Shul'ga, "Influence of a composite cylindrical shell on the acoustic field
of a converter," Prikl. Mekh., 15, 110-114 (1979). 5. E .L . Shenderov, Wave Problems of Hydroacoustics [in Russian], Sudostroenie, Leningrad (1972).
A STUDY OF SHOCK WAVES BASED ON
GENERALIZED THERMODYNAMICS
Ts. P. Ivanov UDC 534.21
Models of thermoelastic media in which heat propagates with a finite velocity were obtained on the basis of the modified Fourier law in [8, 14], and by means of a generalized inequafity of entropy variation in [10, 1 1]. These approaches lead to different models, each of them having its specific features. Analysis of the stationary wave process in a linear and unbounded thermoelastic medium is carried out for these models in [2, 6]. Propagation of longitudinal shock waves in a nonlinear medium was investigated in [1, 5, 7, 13]. In the present paper the structure of longitudinal shock waves is treated by means of solutions with constant profiles. To solve the one-dimensional problem, equations of state and their derivatives, which are nonlinear in the deformation gradient and linear in temperature, are used.
I. Basic Equations and Discontinuity Conditions
The basic system of equations is taken in the form
~' __-~ P0V; q' + P0To~ = 0; v" = e; Toq q- q = - - kT ' ;
poT0~i ~- a "b uToe - b c T -t- hT"; cr = (k .q- 21.0 e q- ve z ~ ~ (T q- ~ " ) ,
(1.1)
where e = u'; v = fl ; u(X, t) is the displacement along the X axis at moment of time t; the prime denotes a/3K, and the dot over the function is a/at; a is the Lagrange stress; q is the Lagrange heat flow; n is the specific entropy; T is the temperature change with respect to the initial absolute temperature To; and Po is the initial density.
Geometric and physical nonlinearities are taken into account through the constant .u. Putting in (1.1) r o = 0, we ob- tain a model based on the generalized inequa, fity of entropy change. The mechanical and thermal constants in this model satisfy the inequalities
k > 0 ; c > 0 ; h > 0 ; ~ 0 ; 3~.q- 2 1 ~ 0 ; r ~q=0. (1.2)
University of Sofia. Translated from Prikladnaya Mekhanika, Vol. 17, No. 9, pp. 27-33, September, 1981. Original article submitted May 4, 1979.
792 0038-5298/81/1709-0792507.50 �9 1982 P lenum Publ i sh ing C o r p o r a t i o n

The model including the modified Fourier taw is obtained from (1.1) for h = c~ = 0, and the constants satisfy the inequalities
k > 0 ; c > 0 ; v o > 0 ; ~ 0 ; 3 X + 2 1 ~ > 0 ; x=#0. (1.3)
We point out that expressions (1.2) follow from the generalized inequality of entropy change and from uniqueness theorems of solutions of the linearized system (1.t) for r o = 0 [9]. Inequalities (1.3) do not guarantee the satisfaction of the Clausius-Duhem inequality, but follow only from uniqueness theorems for the linearized system [3].
The discontinuity of the function f(X, t) at the point X(t), reached by the wavefront at time t, is denoted by
[[1 = f_ - - t+; f_ = l im f (X, t); f+ = lira f (X, t). X-* X(t) X.~X(t) X< X(t) X>X(t)
The kinematic compatibility condition for discontinuities of this function is the following:
d ffl dX (0 [h = - - V WI + - i f / - ; V = a--Y- '
where V is the wavefront velocity.
Following the usual procedure [1, 4], we obtain from (1.1)
-%[q] + [q] = - - k j r ' l ; p0ro [~]] = • [~] + c [ T ] + h [T];
[o] = (~, + 2Ix + v [e] + 2 r e + ) [el - - u (IT] + a [7"]); (1.4)
[ e l + p o V [ v ] = 0 ; [ql =poToV [~l]; [ v l + V [ s l - - 0 ; k[Tl = '%V [q].
For r o = 0 we find from (1.4)
[7"1 = 0; (hV 2 ~ k) [T'I =• [81; (1.5)
(VZ k ) ( V Z _ X + 2~t + v [~1 + 2 w + p 0 ) auzT~ = -0-~ "
The corresponding equations for the case h = a = 0 are
( ! . 6 )
[kT - - zaVq] -~- 0; (k - - xocV ~) [T] = To• 2 [s]; (1.7)
It was shown in [13] that for r 0 = 0 the system of equations (1.1) is hyperbolic when ), + 2g + 2re > 0, while the
condition of mechanical stability of a shock wave propagating in an undeformed medium is of the form v[e] > 0. By
similar arguments for waves in a deformed medium we obtain the same stability condition. It can also be shown that for system (1.1), when h = ~ = 0, the hyperbolicity conditions of the system and the mechanical stability of shock waves coin- cide with the corresponding conditions for a system with r 0 = 0.
2. S o l u t i o n s w i t h C o n s t a n t Wave Prof i l e s
We seek a solution of system (1.1) with r o = 0, depending on X and t only via the variable ~ = X - Vt, where
V ~ 0 is a constant representing the profile velocity of motion. The system can be written in the form
a ' - 4 - p 0 V v ' = 0 ; v ' + V d = O ; q = - - k T ' ; (r--(~-{-2fl)~-{-v~ 2 -
- - • + axVT'; h Va' + ccxq" - - V [h (~ + 2is + 2v~) + cz• ~" + Vx (h - - az) T" = 0, (2.1)
where the prime denotes d/d~.
After integration and several transformations we obtain
a ----- p o V ~ ; q --~ 7 - kT)o ~--- (~ + 2Ix) s + vs 2 - - x T ~ ~ q;
793

{ f {\ L,/r j \
l i/ \l Fig. 1
i
hV6 + a• - - V [h (7` + 2{x + re) + au2T0] e + V~ (h - - ca) T = 0. (2 .2 )
The integrat ion constants are chosen as follows: Fo r ~ ~ + oo the fol lowing equalit ies are valid: o = e = q = T = 0~while for
~ _oo we have the equalities o = o*, T = T*, q = 0, e = e* ~ 0 or the inverse. In that case
o* ~ p0VZs*; o* = (7` --I- 2~t q- re*) a * . gT*;
h V & - - V {h (7, + 21~ + re*) + c~• e* + Vx (h - - ca) T* = 0,
and, consequent ly ,
I t fol lows f rom relations (2.2) that
~8" = p0V~-- (7 ̀+.2~ + x@T~ (2.3)
(hV 2 - - k) v (ei - - ~) e . (2 .4 ) T ~ k z + • ~ ( c a - h ) '
Here
d~ k dT - - 2 (hV ~ - - k) (e~ - - e) d'--~ = - - q de cVe ( e* - - 8) (2.5)
/ au2ToV2~ 2~82 = re, = po V2 - - {7` + 21~ + (2.6)
while the denomina tor in (2.5) vanishes for e = 0 and e = e*, and the numera tor vanishes for e = %.
F rom Eqs. (2.3) and (2.6) we obtain
~ T ~ V ~ ( a - h ) + k~2T~
e* - - ~2 ___ 1 + 2~p (V~); qo (V 2) ~--- e~ (hV 2 - - k) [p0V 2 - - (7 ̀+ 2r~)] - - a• z "
(2.7)
When 0 < V 2 < V~ and V 2 > V~, where 0 < V~ < V~ are the roots o f the equat ion
(hV 2 - - k) [90V z - - (L + 2p)l - - a• V2 ~- 0, (2.8)
we have ~(V 2) > 0 (Fig. 1) and the profi le reverses, since the numera tor vanishes for e = e 2 , located be tween 0 and e*.
The profile is rectified by int roducing the appropriate discont inui ty (1.5). It is chosen in such a manner that [T] =
0. A discont inui ty profile is also obtained for V~ < V 2 < V 2 if V 2 and V~ are the positive roots o f the equat ion ~0(V 2) =
- I / 2 ( then ( e * - e 2 ) / 2 > 0). We point ou t that this equa t ion does no t always have positive roots, so that for some media
this interval can exist, while for elastic ones it will not. In the first case for V 2 = V 2 and V 2 = V 2 the profile has a weak dis-
cont inui ty for e = e*; since e 2 = e* (e is cont inuous as a funct ion o f ~; however, its derivative is discont inuous at e = e*). A
weak discont inui ty also occurs for V 2 = V 2 and V 2 = V~. It is obta ined for e = 0, since then e 2 = 0. Taking into account
794

E ~
a
~ d
g
)- i
E0 L
o [ f
h
Fig. 2
that r e* > 0 and r e* < 0, respectively, for V 2 > (X + 2t~)/O o + XZTo/CO o and V 2 < (X + 2ta)/p o + g2To/cP o, but
v (e* - - 50 > 0 and v (5" - - et),< 0, respectively, for V 2 > k/h and V 2 < k/h, and, besides, that k/h is in one of the intervals
~_~o2~ g 'T0~_~ ( k ) 1), one can draw (V~, V~) or (V~4 , V~), while (X + 2t~)/p o +~ 2Ticp0 is in the other (since cp at" cpo ) cp = -
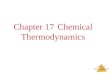
the following conclusion for V = 0: the shock profile on Fig. 2a corresponds to V 2 < V~ and v > 0, and on Fig. 2b, to 2 k
V 2 < V~ and v < 0; for Va < V z < V~ < -h- the profiles are shown in Fig. 2c-d for p > 0 and v < 0, respectively; when
k 2 V ~ V~, the profiles for v > 0 and v < 0 are shown in Fig. 2e-f; the shock profiles in Fig. 2g-h were obtained ~ - < V 3 < <
for V 2 > V~ and v > 0 or v <: 0, where we introduced the notation 50 ~--- 51-- 8" .
Since it follows from (2.4) that T = 0 for e = 0 and e = e 1 and the T values for e = e* and e = eo are also equal,
then IT] = 0 for all discontinuities. The conditions at the discontinuity (1.5), (1.6) are satisfied for each of the cases con-
sidered, since [5 ]@25+=e , and since
d T d T d T de c V v (5* ~ 8) ~ (2.9) a--}- = ~ ~ --A- ~ = k,, + ,,v~ (c= - h) "
A continuous profile is obtained for ( e * - % ) / % < 0, i.e., for V~< V~< V~ and V~< V z < V] (if r 2) = - 1 / 2 has no posi-
tive roots, then V ~ < V Z < Vg), since in this case the numerator has no zeros in the interval between 0 and e*. Here one
must eliminate the velocity V 2 = (X + 2tz)/p 0 + • o, since for it e* = 0, and there exists no solution with a constant profile.
For a continuous profile e tends to 0 or e* exponentially, while ~ tends to +oo. The transition region has no exact width, but it can be estimated by various methods [4], e.g.,
t [e*] (2.10)
Taking into account that a maximum of I de/d~l is achieved for
e ~__.__.: 82 ( 1 /"5~ ~ e*~ - - 1 / 5,'"')' (2.11)
we obtain
= (_hv~ - ~) [l + V - l - ~ (v~)], cV [ 1 q- q~ (VZ)]
(2.12)
If the width l is small in comparison with other characteristic lengths, the sharp change in e can approximate the discontinuity satisfactorily.
Halting at the solution with a constant wave profile for the case h = o~ = 0, the system can be written in the form
(~ q- 2~ -q- 2re) e" - - ~T" .q- poVo" ~-- 0; tr q- Vs' ~--- 0;
%Vq" ~ kT" .~- q; xToVs" n t- c V T ' ~ q" = O, (2.13)
795

where the prime denotes d/d~.
After integration under the same conditions at infmity as in the preceding case, we obtain
(L + 21~ + ve-- PoV2)8-- ~T ~--O; %Vq" -- kT" -~-.q;
uToV8 + cVT - - q = 0; (k + 21~ + ~s* - - po V~) 8" - - • -~-- 0; (2.1 4)
~Toe* + cT* = O.
Equations (2.3)-(2.12) and alt their consequences are then valid if the function T is replaced by T - (%V/k)q, and h and
o~ by ro c mad r o, respectively. A study of wave profiles as a function of velocity V of its motion leads to the same results;
the conclusions concerning the forms of shock profiles, shown on Fig. 2, are similar. Now, however, conditions (1.7) are satisfied at the discontinuity.
We have classical tnermoelasticity if in system (1.1) and in all subsequent equations one puts r o = h = ol = 0. In this case we have
Po Po cP0
while the velocities V~ and V42 do not exist, and ~(V 2) -~ 0 when V 2 tends to + oo. Consequently, only the first four shock
waves shown on Fig. 2 are possible.
3. Thermodynamic Validity of Shock Profiles
From the generalized inequality for entropy production [14]
q ' p o ~ + ( _ ~ ) ~ 0 ; r 1 ", + ~-~T (3.1)
we obtain
where t3 and 7 are constants.
Taking into account that
q+ ( to] + o + ) = [q] - - ~ [r [.1 = [~1 - - ([q~l + o + ) In] - - n+ [~1, (3.3)
we determine [q] from the first of Eqs. (1.1) and the energy conservation equation
p0 ~ = oo' - - q'.
Here # -~ ~ - - ~1 qp , and a is the specific internal energy�9
Then
[q] =PoV [~ + ~] + [ or]
and we obtain
(3.4)
(3.5)
V ([pnq~] -t- p0~l+ [r -t- ~ [vz] - - q+ 1 [av])~<0. (3.6) t l+
For the model under consideration we have [12]
1 c ~ ;, ,az + ~ a 2-~,-~o +2- -~-0 T'~" (3.7) P~ + ~ 2 -~e2 + 3 e3--• --r o )T~,__ I [czh + ya)]/, 2 1 a,k
From (3.2)-(3.7) and the second of Eqs. ( t .5) we then write for the case r o = 0 the final form of the condition for thermodynamic validity
Vv[e] (--e~ [e] + 31-- [el2 e+ [ e ] ) ~ 0. (3.8)
796

ft is aIways satisfied, since the condition for mechanical stability, satisfied for all profiles on Fig. 2, would be u[e] > 0, and in all cases we had V > 0, i.e., the profiles move toward increasing X.
We point out that for the cases under consideration the condition for mechanical stability and thermodynamic con- vexity does not impose any further restrictions.
In classical thermoelasticity we have the same condition for thermodynamic validity of (3.8) for %, selected from (2.6) for .~ = 0, leading to the same results. In this case the system is of mixed hyperbolic-parabolic type, and the conditions for mechanical stability do not exist.
When h = c~ = 0 the mechanical stability condition is satisfied for all profiles on Fig. 2. The Clausius-Duhem in- equality for this model reduces to qT' ~ 0. Determining T and q from (2.14) and using the corresponding expression for d~/de, we obtain that this inequality is always satisfied. The thermodynamic validity condition has the form (3.6) if
= T o + T, and the expression for po,I, is taken in the form (3.7), where all terms containing ]" are omitted. Finally, the condition for thermodynamic validity is:
{ ( 1 [el) 2 (k_%cv,)~ N'~}~<0. V v Is] - - e~ [el + -~" [el z + 8+ 1 %NzkToVZ (3.9)
Since the expression m the brackets is always negative, and V > 0 for all profiles (Fig. 2), inequality (3.9) is always satisfied.
LITERATURE CITED
1. D. Bland, Nonlinear Dynamical Theory of Elasticity [Russian translation], Mir, Moscow (1972). 2. Ts. P. Ivanov and Yu. K. Engel'brekht, "Models of thermoelasticity with account of the finite velocity of heat
propagation," Inzh.-Fiz. Zh., 35,344-351 (1978). 3. Ya. S. Podstrigacn and Yu. M. Kolyano, Generalized Thermodynamics [in Russian], Naukova Dumka, Kiev (1976). 4. G.B. Whitham, Linear and Nonlinear Waves, Wiley, New York (1974). 5. Yu. K. (Sngel'brekht, "Theory of one-dimensional waves in nonlinear dissipative media," Mekh. Polim., No. 1, 41-48
(1976). 6. Yu. K. Engel'brekht and Ts. P. Ivanov, "Relative thermal-mechanic behavior in a model with a boundary velocity for
fuel propagation," in: Theoretical and Applied Mechanics, Proc. Third National Congress, Sofia, 1977 [in Bulgarian], Vol. 1, pp. 403-408.
7. C.E. Beevers, "Stability of waves and shock structure in generalized thermoelasticity at low temperature," Acta Mech., IJ , No. 1, 55-68 (1973).
8. N. Fox, "Generalized thermoelasticity," Int. J. Eng. Sci., 7 ,437-446 (1969). 9. A.E. Green, "Note on linear thermoelasticity," Mathematika, 19, No. 1, 69-75 (1972). 10. A. E. Green and N. Laws, "On the entropy production inequality," Arch. Rat. Mech. Anal., 45, No. 4, 47-53 (1972). 11. A. E. Green and K. A. Lindsay, "Thermoelasticity," J. Elast., 2, No. 1, 1-7 (1972). 12. Ts. P. Ivanov, "Thermoviscoelasticity with a temperature rate dependence," Theor. Appl. Mech., 5, No. 2, 85-91 (1974). 13. Ts. P. Ivanov, "Waves of discontinuities in temperature rate dependent thermoviscoelasticity and thermoelasticity," in:
Nonlinear Deformation Waves [in Russian], Vol. 2, Tallin (1978), pp. 78-81. 14. H. W. Lord and I. A. Shulman, "Generalized dynamic theory of thermoelasticity," J. Mech. Phys. Solids, 15, 299-309
(1967).
797