Embed Size (px)
Citation preview

USMOS 2015 ODTÜ, ANKARA
ARACA MONTELİ İLERİ BAKAN YERE NÜFUZ EDEN RADAR
SİSTEMLERİNİN ZUSF YÖNTEMİ İLE MODELLENMESİ
M. Burak Özakın(a), Serkan Aksoy (a),
A. Serdar Türk (b) , M. Dağcan Şentürk (b)
(a) Gebze Teknik Üniversitesi, Elektronik Mühendisliği Bölümü
[email protected], [email protected]
(b) Yıldız Teknik Üniversitesi, Elektrik-Elektronik Mühendisliği Bölümü
[email protected], [email protected]
ÖZ
Toprakta gömülü cisimlerin tespit ve teşhisi için Yere Nüfuz Eden Radar (YNR)
sistemleri sivil ve askeri alanlarda yoğun olarak kullanılmaktadır. Gömülü patlayıcıların
klasik YNR’lere (anteni toprağa dik) göre menzilde daha erken tespit ve teşhisinin
yapılabilmesi için bu sistemler araca ileri bakacak şekilde monte edilmektedir.
YNR’lerde tespit ve teşhis performansı kullanılan antenle ilişkili olduğundan, farklı
antenler için sistemin elektromanyetik modellenmesi önemlidir. İleri Bakan YNR (İB-
YNR) probleminde gerek kaynakların geniş bandlı olması ve gerekse anten ve
cisimlerin karmaşık geometrileri nedeniyle analitik çözümler çoğu kez mümkün
değildir. Bu nedenle sayısal yöntemler kullanılır. Bu çalışmada, araca monteli bir İB-
YNR sistemi için tasarlanan çok geniş bandlı Horn, Vivaldi ve Horn beslemeli
Reflektör antenleri için sistemin tespit başarımı sayısal bir yöntem olan üç boyutlu
Zaman Uzayı Sonlu Farklar, ZUSF (Finite Difference Time Domain, FDTD) yöntemi
ile araştırılmıştır. Problem uzayında verici/alıcı anten, toprak ve toprakta gömülü iletken
bir küp cisim bulunmaktadır. İB-YNR problemi açık uzay problemi olduğundan
problem uzayı soğurucu sınır koşulu (PML) ile sonlandırılmıştır. Antenlerin hava-
toprak ara yüzüne göre üç farklı açıda (düşük, orta (Brewster) ve yüksek) yerleştirilmesi
durumunda, yatay eksende konumsal saçılan alanların hesaplanması ile sistemin tespit
başarımı incelenmiştir. Buna göre Brewster açısında antenlerin kullanımı ile menzilde
daha erken tespit yapabildiği gösterilmiştir.
Anahtar Kelimeler: Araca Monteli Yere Nüfuz Eden Radar, Çok Geniş Bandlı Anten,
Erken Tespit Sistemleri, Gömülü Patlayıcılar, Zaman Uzayı Sonlu Farklar Yöntemi.
156

USMOS 2015 ODTÜ, ANKARA
VEHICLE MOUNTED FORWARD LOOKING GROUND
PENETRATING RADAR SYSTEMS MODELLING
BY USING FDTD METHOD
ABSTRACT
Ground Penetrating Radar (GPR) systems are frequently used in the civilian and
military applications for detection and discrimination of buried objects. Unlike classical
GPR systems whose antennas are normal to the ground, these systems are mounted on
the vehicle like forward looking form for early detection of buried explosives. Because
detection and discrimination performance of GPR depend on its antennas,
electromagnetic modeling of the system for different antennas is quite important.
Analytical solutions are mostly impossible for Forward Looking GPR (FL-GPR)
problem because of wide-band sources and complex shaped geometry of
antennas/objects. For this reason, numerical methods are used. In this work, detection
performance of the vehicle mounted FL-GPR system is investigated by a numerical
method of three-dimensional Finite Difference Time Domain (FDTD) for wide-band
Horn, Vivaldi and Horn-fed Reflector antennas. Receiver/transmitter antenna, soil and a
buried cubic conductive object are included within the problem space. The numerical
problem space is terminated by a PML type absorbing boundary condition because the
FL-GPR problem is an open-space problem. Detection performance of the system is
investigated by calculation of scattered field range distribution along a horizontal axis
for three different angles (low, medium (Brewster angle), and high) of antennas which
are located at air-soil interface. Accordingly, the Brewster angle shows better
performance for early detection.
Keywords: Buried Explosives, Early Detection Systems, Finite Difference Time
Domain Method, Vehicle Mounted Forward Looking Ground Penetrating Radar, Wide-
Band Antenna.
157

USMOS 2015 ODTÜ, ANKARA
1 GİRİŞ
Toprak altı yapısının araştırılması ve gömülü cisimlerin tespiti yoğun araştırılan
konulardır. Bu amaç için kullanılan Yere Nüfuz Eden Radar, YNR (Ground Penetrating
Radar, GPR) sistemleri elektromanyetik sistemler olup, bu sistemlerin gelişimi geniş
çapta mühendislik ve bilimsel araştırmalar gerektirmektedir. Elektromanyetik dalgaların
kayıplı ortamlarda yayılması, anten teknolojisi, radar sistem tasarımı ve işaret/görüntü
işleme konuları bunların başlıcalarıdır. YNR teknolojisinde donanım özellikleri hedefin
türüne, yapısına ve gömülü bulunduğu ortama göre optimize edilmelidir [1].
Günümüzde YNR sistemleri sivil ve askeri olmak üzere bina/yapı tahribatsız testi,
yol/tünel kalite değerlendirmesi, yer altı boşluk, boru, kablolar ve kara mayınlarının
tespiti vb. geniş uygulama alanı bulmuştur. YNR sistemleri insanlı/insansız bir araca
monte edilerek antenin ileriye bakacak şekilde konumlandırılması ile, menzilde erken
tespit ve teşhis araştırmaları yapılmış ve bu sistemler İleri Bakan YNR, İB-YNR
(Forward-Looking GPR, FL-GPR) olarak isimlendirilmiştir. İB-YNR sistemlerinin
geliştirilmesi için yapılan prototipler ve bunların testleri ekonomik olarak maliyetli ve
zaman alıcıdır. Ayrıca farklı senaryoların uygulanması için test ortamının oluşturulması
zor ve sıkıntılı olduğundan modelleme ve simülasyon çalışmaları kritik önem
taşımaktadır.
İB-YNR probleminde gerek kaynakların geniş bandlı olması ve gerekse anten ve
cisimlerin karmaşık geometrileri nedeni ile analitik çözümler son derece zor veya
mümkün değildir. Bu nedenle sayısal çözümler öne çıkmaktadır. Bu kapsamda Zaman
Uzayı Sonlu Farklar, ZUSF (Finite Difference Time Domain, FDTD) yöntemi çözüm
için yoğun olarak kullanılmaktadır [2]. Bu yöntemin kullanılmasında İB-YNR problemi
bir açık uzay (open space) problemi olduğundan, sayısal problem uzayının Soğurucu
Sınır Koşulu (Absorbing Boundary Condition) ile sonlandırılması gereklidir. Böylece
açık uzay şartları benzetim ortamında sağlanmış olmaktadır [3].
Bu çalışmada araca monteli bir İB-YNR sistemi için tasarlanan üç farklı ve çok geniş
bandlı (Horn, Vivaldi ve Horn beslemeli Reflektör) antenin tespit başarımı analizi üç
boyutlu ZUSF yöntemi tabanlı XFDTD yazılım paketi kullanılarak incelenmiştir [4].
Antenlerin hava-toprak ara yüzüne göre göre üç farklı açıda (düşük, orta (Brewster) ve
yüksek) yerleştirilmesi durumunda, yatay eksende konumsal saçılan alan dağılımının
hesaplanması ile sistemin erken tespit başarımı incelenmiştir.
158

USMOS 2015 ODTÜ, ANKARA
2 YERE NÜFUZ EDEN RADAR
YNR sistemleri elektromanyetik dalgaların farklı ortamlarla etkileşimi prensibine
dayanmaktadır. Farklı elektriksel ortamlarla karşılaşan elektromanyetik dalgaların
enerjisinin bir kısmı söz konusu ortama belli bir açıyla nüfuz eder, geri kalan kısmı da
yansıyarak geri döner. Yansıyarak geri dönen işaret bize farklı bir katmanın/cismin
varlığını gösterir. Ortamın elektromanyetik parametreleri saçılmanın oluşmasında
önemli rol oynar. Şekil 1’de temel bir YNR sitemi blok şeması ve yayılım ortamı
gösterilmiştir.
Şekil 1. Temel bir YNR sistemi blok şeması ve yayılım ortamı.
Şekil 1’e göre D vericiden alıcıya doğrudan iletilen işareti, G hava-toprak arayüzünden
geri yansıyarak alıcıya ulaşan işareti, S ise gömülü cisimden saçılan işareti gösterir.
YNR sistemlerinin başarılı olması için tasarım aşamasında İşaret/Gürültü oranı, Hedefin
yatay çözünürlüğü, Derinlik çözünürlüğü vb. parametreler öngörülmelidir. Bunlarla
birlikte menzil, havadan toprağa geçiş kaybı, topraktan havaya geçiş kaybı, yayılım
kaybı, hedef saçılma kaybı, ortam zayıflama kaybı, parazitler vb. ek parametrelerin de
değerlendirilmesi gerekmektedir.
Bahsedilenler kapsamında YNR probleminin benzetimi Maxwell denklemlerinin verilen
başlangıç ve sınır koşulları altında çözümünden ibarettir. Bu denklemlerin çözümü
kanonik geometriler için analitik olarak elde edilebilmekle beraber, karmaşık
geometriler ve farklı ortam parametreleri için zor olduğundan, sayısal (nümerik) olarak
elde edilir. Bu amaçla geliştirilen yöntemlerden bazıları Sonlu Farklar yöntemi, Sonlu
Elemanlar yöntemi ve Momentler yöntemidir. Özel olarak YNR sistemlerinin benzetimi
için geniş bandlı çözümlere ihtiyaç duyulacağından, zaman uzayı çözümleri önem
kazanmaktadır. Bunlardan biri olan ZUSF çözümleri tam dalga (full wave) çözüm
sağladığından, yukarıda bahsedilen tüm etkileri çözümünde barındırmaktadır [3].
159

USMOS 2015 ODTÜ, ANKARA
3 ZAMAN UZAYI SONLU FARKLAR YÖNTEMİ
Zaman Uzayı Sonlu Farklar, ZUSF (Finite Difference Time Domain, FDTD) yöntemi
elektromanyetik problemlerin çözümünde yaygın olarak kullanılmaktadır. ZUSF
toprağın katmanlı ve heterojen modellenmesi ile birlikte, toprak katmanlarının
elektromanyetik parametrelerinin benzetim senaryolarına göre değiştirilebilmesine ve
geniş bandlı kaynakların uygulanmasına imkân sağlayan bir yöntem olduğundan,
gerçekçi YNR benzetimlerinde sık tercih edilmektedir [2], [3].
3.1 Maxwell Denklemleri ve ZUSF Yöntemi
ZUSF yöntemi temelde analitik türevlerin ve bilinmeyen alanların zaman ve konumda
ayrıklaştırılarak zamanda en ileride olanın önceki zamanda yer alan alanlardan iteratif
olarak hesaplanması mantığına dayanır. Örneğin ikinci Maxwell denklemi için
∇ × 𝑯(𝒓, 𝑡) =𝜕
𝜕𝑡𝑫(𝒓, 𝑡) + 𝑱(𝒓, 𝑡) (1)
ifadesinde zamana ve konuma bağlı türev ve alanlar ayrıklaştırılarak bir Yee hücresine
yerleştirilir. Konum ve zaman türevleri sonlu merkezi farklar ile alınarak
𝐸𝑥|𝑖+
12,𝑗,𝑘
𝑛+1 =∆𝑡
𝜀
[ 𝐻𝑧|
𝑖+12,𝑗+1,𝑘
𝑛+12 − 𝐻𝑧|
𝑖+12,𝑗,𝑘
𝑛+12
∆𝑦−
𝐻𝑦|𝑖+
12,𝑗,𝑘+1
𝑛+12 − 𝐻𝑦|
𝑖+12,𝑗,𝑘
𝑛+12
∆𝑧− 𝐽𝑥|
𝑖+12,𝑗,𝑘
𝑛+12
]
+ 𝐸𝑥|𝑖+
12,𝑗,𝑘
𝑛 (2)
şeklinde güncelleme denklemi elde edilir. Burada ∆𝑡 birim zaman adımı, ∆𝑦 ve ∆𝑧
ayrıklaştırılmış uzayın sırasıyla 𝑦 ve 𝑧 ekseni yönündeki birim hücre uzunluklarıdır.
Buradan, zamanda en ileride olan alan üzerinden ve her bir bileşen için ZUSF
güncelleme denklemi elde edilmiş olur. Yukarıda elde edilen denkleme benzer olarak
diğer alan bileşenleri için de güncelleme denklemleri elde edilebilir [3].
3.2 Sayısal Kararlılık
Sınırlı Giriş için Sınırlı Çıkış anlamına gelen sayısal kararlılık kapsamında ZUSF
yönteminin kararlılığı
∆𝑡 ≤1
𝑐[
1
∆𝑥2+
1
∆𝑦2+
1
∆𝑧2]−
12 (3)
olmak üzere Courant–Friedrich–Levy kararlılık koşuluna bağlıdır. Burada 𝑐
elektromanyetik dalganın yayılım hızını gösterir.
160

USMOS 2015 ODTÜ, ANKARA
4 İB-YNR SİSTEMLERİNİN ZUSF İLE MODELLENMESİ
Bu kısımda üç boyutta ve toprakla açılı durumda geniş bandlı Horn anten, Vivaldi anten
ve Horn beslemeli Reflektör anten için benzetim sonuçları verilecektir. Sonuçlar her bir
anten için düşük, orta (Brewster) ve yüksek açıda
- Problem uzayının dikey kesitinde toplam elektrik alan dağılımı,
- Alıcı antende indüklenen (alınan) elektrik alanların her birinin zaman uzayı
değişimleri üzerinden hesaplanan konumsal saçılan alanlar
kapsamında ele alınarak, İB-YNR antenlerinin erken tespit başarımı ön görülmeye
çalışılacaktır. Yeterli matematiksel doğruluk sağlanması için kaynağın en yüksek
frekans bileşenine karşılık gelen dalga boyu üzerinden birim hücre uzunlukları
belirlenerek sayısal dispersiyon hataları azaltılmıştır.
4.1 Sayısal Problem Uzayı
İB-YNR problemi için gerçekte üç boyutlu olan ZUSF sayısal problem uzayının iki
boyutlu şematik görünümü Şekil 2’de verilmiştir. Buna göre hava-toprak ara yüzüne
farklı açılarla yerleştirilen anten ile dikdörtgen kesitli iletken gömülü bir cisim için
ZUSF benzetimleri yapılmıştır. Antenin bulunduğu hava bölgesi boş uzay (free space)
ve iletken cismin bulunduğu toprak dielektrik ortam olarak modellenmiştir. Antenlerin
geometrik bakımından daha doğru modellenmesi için sayısal problem uzayı homojen
olmayan şekilde ızgaralanmıştır. Yani antenin bulunduğu bölge daha sık, diğer bölgeler
ise daha seyrek modellenmiştir.
Şekil 2. Homojen olmayan ızgarlama ile İleri Bakan YNR ZUSF benzetim problemi
geometrisinin iki boyutlu şematik gösterilimi.
161

USMOS 2015 ODTÜ, ANKARA
Şekil 2’ye göre antenler hava-toprak ara yüzünden sabit bir yükseklikte tutularak yatay
menzil boyunca eş adımlarla hareket ettirilip saçılan alanlar toplanmaktadır. Antenlerin
hava-toprak ara yüzeyi ile üç farklı açı yapması durumunda incelemeler yapılmıştır.
Gömülü cisim 𝑥 ekseni (menzil) boyunca yaklaşık 1.4’üncü metrede yerleştirilmiştir.
Bu kapsamda, örneğin geniş bandlı Vivaldi anten için sayısal problem uzayı
parametreleri Tablo 1’de ve ZUSF parametreleri de Tablo 2’de verilmiştir.
Tablo 1. İB-YNR Problem Uzayı Parametreleri.
Problem uzayı fiziksel boyutları (𝐿𝑥 × 𝐿𝑦 × 𝐿𝑧) 2.5 × 0.4 × 0.75 m3
Gömülü cisim fiziksel boyutları (𝑙𝑥 × 𝑙𝑦 × 𝑙𝑧) 0.06 × 0.06 × 0.06 m3
Vivaldi antenin merkez koordinatları (𝑥𝑎 × 𝑦𝑎 × 𝑧𝑎) 0.2 m × 0.2 m × 0.55 m
Anten merkez koordinatı ile toprak mesafesi 30 cm
Gömülü cismin merkez koordinatları (𝑥𝑐 × 𝑦𝑐 × 𝑧𝑐) 1.4 m × 0.2 m × 0.09 m
Hava bağıl dielektrik sabiti, 𝜀𝑟ℎ𝑎𝑣𝑎 1
Toprak bağıl dielektrik sabiti, 𝜀𝑟𝑡𝑜𝑝𝑟𝑎𝑘
2.5
Hava, toprak ve cismin bağıl manyetik sabiti, 𝜇𝑟 1
Hava ve toprağın elektriksel iletkenliği, 𝜎 0 S/m
Cisim elektriksel iletkenliği, 𝜎𝑐𝑖𝑠𝑖𝑚 5.8 × 107 S/m
Tablo 1’de verilen anten merkez koordinatları, anten beslemesinin dipol modeli olarak
uygulandığı anten adaptör koordinat merkezini göstermektedir. Yine gömülü iletken
cisim merkez koordinatı da kübik kesitli iletken cismin ağırlık merkezine karşılık gelen
koordinatlarına denk gelmektedir.
Tablo 2. İB-YNR için ZUSF Parametreleri.
Homojen birim hücre boyutları (∆𝑥 × ∆𝑦 × ∆𝑧) 2 × 2 × 2 mm3
Homojen olmayan birim hücre boyutları (∆𝑥 × ∆𝑦 × ∆𝑧) 0.5 × 0.5 × 0.5 mm3
Problem uzayı hücre sayısı (𝑁𝑥 × 𝑁𝑦 × 𝑁𝑧) 1639 × 446 × 794
Vivaldi antenin merkez hücre numaraları (𝑖𝑎 × 𝑗𝑎 × 𝑘𝑎) 300 × 223 × 450
Gömülü cismin merkez hücre numaraları (𝑖𝑐 × 𝑗𝑐 × 𝑘𝑐) 1120 × 223 × 60
Birim zaman adımı, ∆𝑡 9.62 × 10−13 sn
Toplam zaman iterasyonu sayısı, 𝑛 15000
Yaklaşık hafıza gereksinimi 20.2 GB
Yaklaşık toplam hesap süresi (Tek bir konum için) 30 saat
Kullanılan bilgisayar işlemci modeli ve hızı Z 800 HP İş İst.
162

USMOS 2015 ODTÜ, ANKARA
Homojen ızgaralama durumunda hesap süresi, hafıza ihtiyacı vb. yaklaşık % 30
civarında azalmaktadır. Buna karşın geometrik model daha kaba ızgaralanmaktadır. Bu
durum özelikle anten iç yapısının detaylı olması nedeni ile tercih edilmemelidir.
Özel olarak yatayda düşük açı 25 derece, orta (Brewster) açı 32 derece ve yüksek açı 40
derece olarak alınmıştır. Bu kapsamda orta açı θB = tan−1(√ε2/ε1) formülü gereği
yüzey normali ile 58 dereceye tekabül eden Brewster (orta) açısı olarak seçilmiştir.
4.2 Antenlerin Sayısal Olarak Modellenmesi ve Uyarılmaları
Geniş bandlı Horn, Vivaldi ve Horn beslemeli Reflektör antenlerin sayısal problem
uzayındaki üç boyutlu ızgaralı görünümleri ve uyarılmaları (beslemesi) Şekil 3’de
gösterilmiştir. Yapılan tüm benzetimlerde antenler dipol modeli tekniği kullanılarak 0 −
15 GHz frekans spektrumuna sahip çok geniş bandlı (ultra wide-band) Gaussian türü
zaman bağımlılığa sahip dipol kaynak ile uyarılmıştır. Buradaki dipol modeli tekniğinde
dipol kaynağın eksi kutbunu antenin veya koaksiyel kablonun şasesine, artı kutbunun
ise koaksiyel kablonun canlı ucuna yerleştirilmesi ile uyarım gerçekleştirilmektedir.
Geniş bandlı Horn ve Horn beslemeli Reflektör anten bir adet beslemeye sahipken
Vivaldi anten iki adet beslemeye sahiptir. Vivaldi antendeki bu iki besleme yerinden
aynı kaynak türü ile eş zamanlı uyarım yapılmıştır.
Antenlerin geometrik modellerindeki ince detayların gerçeğe yakın olacak şekilde doğru
modellenebilmesi için homojen olmayan ızgaralama tekniği kullanıldığı Şekil 3’de yer
alan beslemelerin gösterildiği kesit görüntülerinden de anlaşılabilir. Bazı yerler daha sık
ızgaralanmışken bazı yerler daha seyrek ızgaralanmıştır. Bu homojen olmayan
ızgaralama tekniği ile hem cisimler doğruya yakın bir şekilde modellenmiş olur hem de
toplam hafıza ihtiyacı optimize edilir.
163

USMOS 2015 ODTÜ, ANKARA
a) Geniş bandlı Horn anten ve beslemesi.
b) Vivaldi anten ve beslemesi.
c) Horn beslemeli Reflektör anten ve beslemesi.
Şekil 3. Geniş bandlı Horn, Vivaldi ve Horn beslemeli Reflektör antenlerin sayısal
problem uzayındaki ızgaralanmış görünümleri ve uyarılmaları (beslenmesi).
Eş zamanlı besleme
164

USMOS 2015 ODTÜ, ANKARA
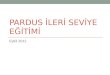
4.3 Toplam Elektrik Alanın İki Boyutta Konumsal Dağılımları
Üç boyutta ZUSF yöntemi ile çözülen İB-YNR problemindeki Geniş bandlı Horn,
Vivaldi ve Horn beslemeli Reflektör antenlerin orta (Brewster) açıdayken problem
uzayında anlık (6000’inci zaman adımında) bir kesit görüntüsü alınarak iki boyuttaki
alan dağılımları Şekil 4’de gösterilmiştir. Sonuçlara bakıldığında, toprağın etkisi ve
cisimden saçılmalar açıkça görülebilmektedir.
Gen
iş B
and
lı H
orn
Viv
ald
i
Ho
rn b
esle
mel
i R
efle
ktö
r
Şekil 4. Geniş bandlı Horn, Vivaldi ve Horn beslemeli Reflektör antenin orta (Brewster)
açıda gömülü iletken cisim ile toplam elektrik alanın konumsal dağılımı.
165

USMOS 2015 ODTÜ, ANKARA
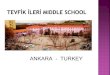
4.4 Saçılan Alanların Konumsal Dağılımları
Saçılan alanların hesabında çıkartma (substraction) tekniği kullanılmıştır. Yani saçılan
alanlar, toplam alandan gelen (incident) alanın çıkartılması ile elde edilmiştir. Bu durum
her bir konum için gelen alanın da bilinmesini (hesaplanmasını) gerektirmektedir. ZUSF
yönteminde prensip olarak aynı anda saçılan ve toplam alanın hesaplanma imkânı
Toplam Alan – Saçılan Alan (Total Field – Scattered Field) formülasyonu gereği
mümkün olmasına rağmen, bu tekniğin gömülü cisim içeren katmanlı ve kaynağı
düzlemsel dalga olmayan (anten türü) problemlerde uygulanması pratik değildir. Bu
nedenle gelen alanın bilinmesi için problem uzayında hiçbir saçıcı cisim (scatterer) yok
iken (yani sadece anten var iken) hesap yapılmasına ihtiyaç duyulmuştur [3]. Bu durum
hesap süresinin iki katına çıkmasına neden olmaktadır.
Gen
iş b
and
lı H
orn
Viv
ald
i H
orn
bes
lem
eli
Ref
lek
tör
Düşük Açı Orta (Brewster) Açı Yüksek Açı
Şekil 5. Geniş bandlı Horn, Vivaldi ve Horn beslemeli Reflektör antenlerin düşük, orta
(Brewster) ve yüksek açıda, gömülü iletken cisimden saçılan elektrik alanın toplam
bileşeni |Etoplam(f)|’in maksimum değeri üzerinden konumsal saçılan alan değişimi.
Şekil 5’ya göre veriler toplam elektrik alanın ilgili frekans bandında maksimum genlik
değerleri için hesaplanmıştır. Burada her bir anten 20 cm adım aralıklarla hareket
ettirilmiştir. İletken cisim 7’inci adımda gömülü olduğundan, İB-YNR sisteminin
iletken cismi 7’inci adımdan daha önce tespit etmesi sistemin erken tespit başarı
kriteridir (⨂ simgesi ile 7’inci adım öncesi muhtemel tespit konumları, ● simgesi ile
166

USMOS 2015 ODTÜ, ANKARA
7’inci adım konumu işaretlenmiştir). Antenlere çok yakın konumlarda (5’inci konum
öncesi) topraktan direkt yansımalar nedeni ile tespit yapılmayacağı varsayılmıştır. Bu
kapsamda her bir anten başarımı aşağıda açıklanmıştır:
- Geniş bandlı Horn anten: Düşük açıda bir, orta açıda bir ve iki, yüksek açıda iki adım
önce cismin tespiti mümkün olabilmektedir. Genel olarak iki adım önce tespit prensip
olarak mümkün olmakla beraber, daha başarılı tespit algoritmasına ihtiyaç duyulabilir.
Özel olarak 7’inci adıma yakın bölgedeki Brewster açısında yüksek genlik değerleri
elde edilmiş ve tespit açısından daha etkin (net rezonans karakteristiği) bir saçılan alan
dağılımı gözlenmiştir.
- Vivaldi anten: Düşük açıda iki, orta açıda bir ve üç, yüksek açıda iki ve üç adım öncesi
tespit mümkündür. İki ve daha fazla adım öncesinde tespit için klasik bir tespit
algoritması yeterli görünmektedir. Özel olarak 7’inci adıma yakın bölgedeki Brewster
açısında rezonans davranışı genişlemiştir.
- Horn Beslemeli Reflektör anten: Kabaca düşük açıda iki ve üç, orta açıda iki ve üç,
yüksek açıda dört adım öncesi tespit mümkündür. İki ve daha fazla adım öncesinde
tespit için klasik bir tespit algoritması yeterli görünmektedir. Özel olarak 7’inci adıma
yakın bölgedeki Brewster açısında rezonans davranışı genliği azalmıştır.
5 SONUÇ
Sonuçlar her bir antenin farklı durumlarda kendine has avantaj ve dezavantajları
olduğunu göstermektedir. Ama genel olarak alan dağılımının detayı bakımından en
etkin antenin Vivaldi türü anten ve açının da Brewster açısı olduğu söylenebilir. Bunun
yanında uygulanacak tespit algoritmasının anten performansı kapsamında tespit
başarımın önemli ölçüde etkileneceği açıktır. Tüm bunlar göz önüne alındığında, İB-
YNR konusunda çok daha fazla araştırmanın yapılması gerektiği sonucuna varılabilir.
Hâlihazırda İB-YNR sistemlerinin çok yaygın olmamasının sebebi söz bahsedilen
zorluklar olarak düşünülmektedir.
Bu çalışma, TÜBİTAK tarafından 110E220 numaralı 1001 projesi ile desteklenmiştir.
6 KAYNAKÇA
[1] Daniels D.J., (1996), Surface Penetrating Radars, The Institution of Electrical Engineers, London,
UK.
[2] Öztürk E., Başaran E., Aksoy S., (2011), Numerical Modeling of Ground Penetrating Radar,
SubChapter in Subsurface Sensing Book from J. Wiley & Sons Inc.
[3] Aksoy S., (2015), Zaman Uzayı Sonlu Farklar Yöntemi, Ders Notları, Elektronik Mühendisliği
Bölümü, Gebze Teknik Üniversitesi, Gebze, Kocaeli, Türkiye.
[4] XFdtd® EM Simulation Software, Remcom, http://www.remcom.com/xf7
167