Embed Size (px)
Citation preview
FILENAME: CAP.6 MACCHINE ASINCRONE.DOC - REV: 18/12/03 9.02 - PAGES: 62
CAPITOLO 6 MACCHINE ASINCRONE
6.1 GENERALITÀ E CENNI COSTRUTTIVI
La macchina asincrona, detta anche ad induzione, è la macchina elettrica rotante più diffusa: viene costruita per potenze che vanno da poche centinaia di W fino ad alcuni MW nella versione trifase, e da qualche W ad alcuni kW nelle realizzazioni monofase.
La macchina asincrona può assolvere a diverse funzioni. Oltre a quella di motore e generatore (sebbene quest’ultima sia da considerarsi eccezionale) può essere impiegata, con opportune disposizioni costruttive che non ne alterano la sostanza, anche come variatore di tensione, variatore di fase, convertitore di frequenza. Tuttavia l’impiego più comune della macchina asincrona è quello come motore: si può dire che circa il 90% dei motori utilizzati nelle industrie sono asincroni. Ciò è dovuto alla semplicità di costruzione, robustezza, relativo basso costo e vari pregi di funzionamento. Tra i pregi vi è la notevole attitudine del motore asincrono a sopportare sovraccarichi temporanei, anche notevolissimi se istantanei, a differenza dei motori sincroni. Questi ultimi, infatti, perdono il passo e si arrestano se sovraccaricati oltre il limite di stabilità.
I principali difetti del motore asincrono sono: - velocità non facilmente controllabile; - corrente di spunto elevata (da 5 ad 8 volte la corrente nominale); - basso fattore di potenza soprattutto a carichi bassi. Tuttavia l’unico vero inconveniente che vieta l’uso dei motori asincroni in talune applicazioni è la impossibilità
di regolarne la velocità con un sistema diretto, semplice ed economicamente conveniente: nella pratica i motori asincroni non sono usati nei casi in cui necessita una velocità rigorosamente costante ed in quelli in cui è necessario avere una velocità regolabile. C’è da osservare, però, che oggi l’elettronica di potenza con il suo avanzato sviluppo ha reso possibile la realizzazione a più basso costo di apparecchiature statiche di controllo e ha quindi consentito l’impiego del motore asincrono anche negli azionamenti a velocità variabile.
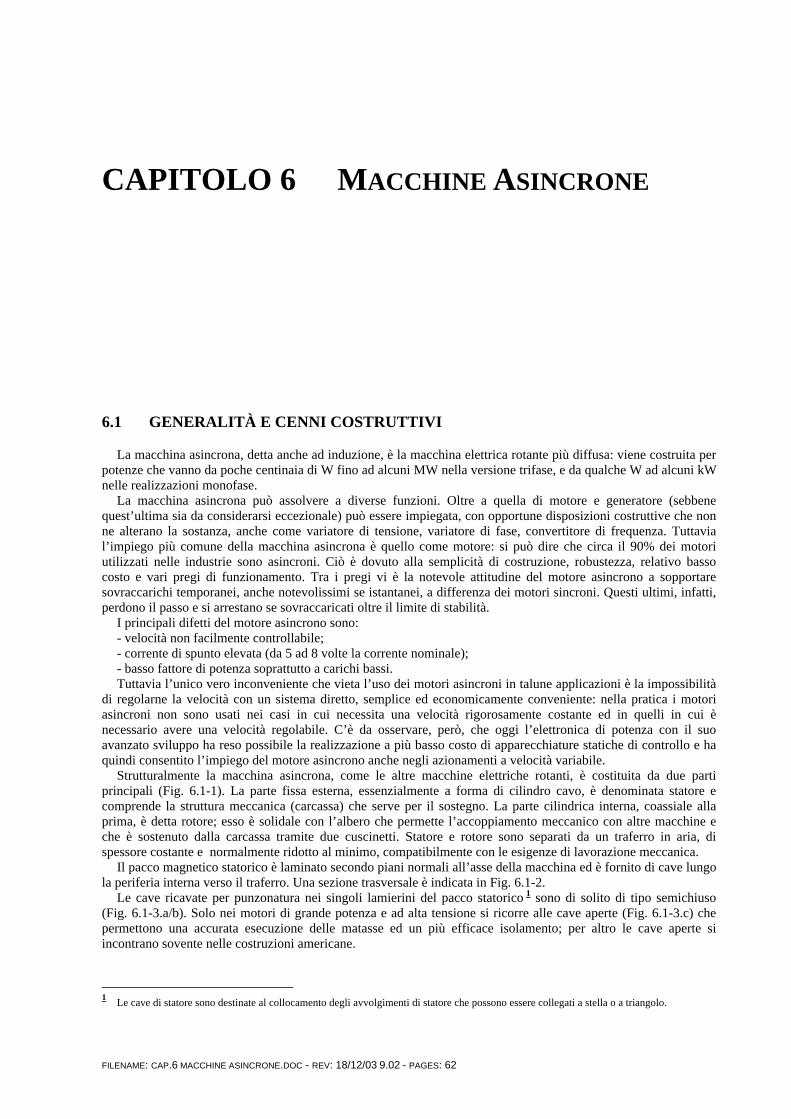
Strutturalmente la macchina asincrona, come le altre macchine elettriche rotanti, è costituita da due parti principali (Fig. 6.1-1). La parte fissa esterna, essenzialmente a forma di cilindro cavo, è denominata statore e comprende la struttura meccanica (carcassa) che serve per il sostegno. La parte cilindrica interna, coassiale alla prima, è detta rotore; esso è solidale con l’albero che permette l’accoppiamento meccanico con altre macchine e che è sostenuto dalla carcassa tramite due cuscinetti. Statore e rotore sono separati da un traferro in aria, di spessore costante e normalmente ridotto al minimo, compatibilmente con le esigenze di lavorazione meccanica.
Il pacco magnetico statorico è laminato secondo piani normali all’asse della macchina ed è fornito di cave lungo la periferia interna verso il traferro. Una sezione trasversale è indicata in Fig. 6.1-2.
Le cave ricavate per punzonatura nei singoli lamierini del pacco statorico 1 sono di solito di tipo semichiuso (Fig. 6.1-3.a/b). Solo nei motori di grande potenza e ad alta tensione si ricorre alle cave aperte (Fig. 6.1-3.c) che permettono una accurata esecuzione delle matasse ed un più efficace isolamento; per altro le cave aperte si incontrano sovente nelle costruzioni americane.
1 Le cave di statore sono destinate al collocamento degli avvolgimenti di statore che possono essere collegati a stella o a triangolo.
160 Generalità e Cenni Costruttivi
statore rotore
traferro
albero
S S
N
N
Asse
Asse interpolare
polare
a b c Fig. 6.1-1 Fig. 6.1-2 Fig. 6.1-3
Per quanto riguarda il rotore, le cui fasi sono generalmente in corto circuito, si distinguono le seguenti strutture.
Rotore di tipo avvolto È costituito da una struttura magnetica, simile a quella dello
statore, calettata sull’albero. Anche i lamierini rotorici, per macchine di piccola e media potenza, sono ottenuti alla punzonatrice automatica che, contemporaneamente al disco, trancia le cave, il foro e gli eventuali altri fori e scanalature.
In ogni caso le cave sono distribuite uniformemente lungo la periferia esterna dei lamierini verso il traferro.
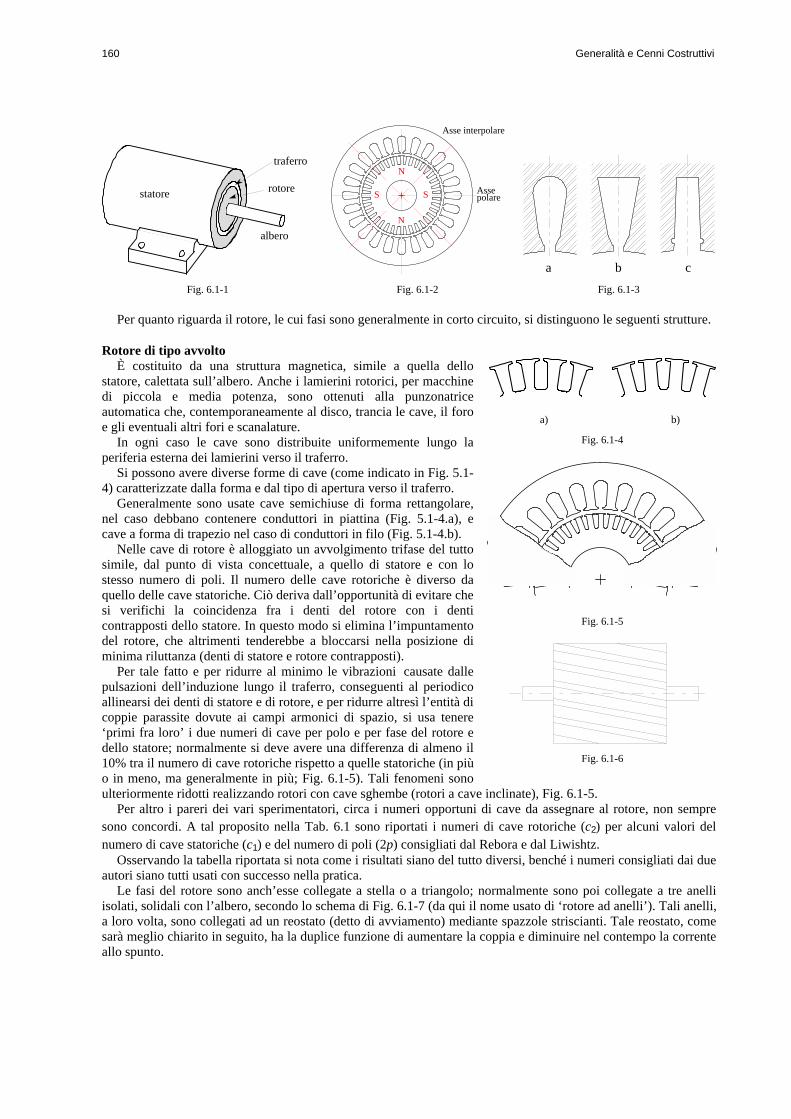
Si possono avere diverse forme di cave (come indicato in Fig. 5.1-4) caratterizzate dalla forma e dal tipo di apertura verso il traferro.
Generalmente sono usate cave semichiuse di forma rettangolare, nel caso debbano contenere conduttori in piattina (Fig. 5.1-4.a), e cave a forma di trapezio nel caso di conduttori in filo (Fig. 5.1-4.b).
Nelle cave di rotore è alloggiato un avvolgimento trifase del tutto simile, dal punto di vista concettuale, a quello di statore e con lo stesso numero di poli. Il numero delle cave rotoriche è diverso da quello delle cave statoriche. Ciò deriva dall’opportunità di evitare che si verifichi la coincidenza fra i denti del rotore con i denti contrapposti dello statore. In questo modo si elimina l’impuntamento del rotore, che altrimenti tenderebbe a bloccarsi nella posizione di minima riluttanza (denti di statore e rotore contrapposti).
Per tale fatto e per ridurre al minimo le vibrazioni causate dalle pulsazioni dell’induzione lungo il traferro, conseguenti al periodico allinearsi dei denti di statore e di rotore, e per ridurre altresì l’entità di coppie parassite dovute ai campi armonici di spazio, si usa tenere ‘primi fra loro’ i due numeri di cave per polo e per fase del rotore e dello statore; normalmente si deve avere una differenza di almeno il 10% tra il numero di cave rotoriche rispetto a quelle statoriche (in più o in meno, ma generalmente in più; Fig. 6.1-5). Tali fenomeni sono ulteriormente ridotti realizzando rotori con cave sghembe (rotori a cave inclinate), Fig. 6.1-5.
Per altro i pareri dei vari sperimentatori, circa i numeri opportuni di cave da assegnare al rotore, non sempre sono concordi. A tal proposito nella Tab. 6.1 sono riportati i numeri di cave rotoriche (c2) per alcuni valori del numero di cave statoriche (c1) e del numero di poli (2p) consigliati dal Rebora e dal Liwishtz.
Osservando la tabella riportata si nota come i risultati siano del tutto diversi, benché i numeri consigliati dai due autori siano tutti usati con successo nella pratica.
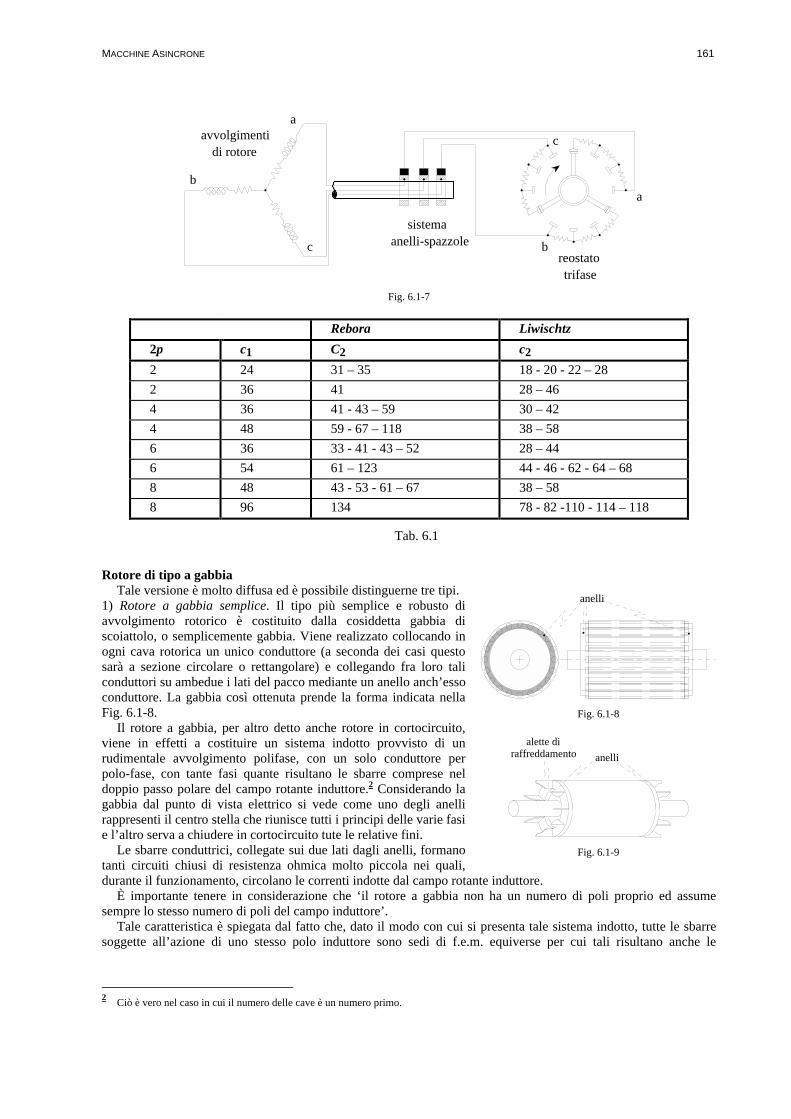
Le fasi del rotore sono anch’esse collegate a stella o a triangolo; normalmente sono poi collegate a tre anelli isolati, solidali con l’albero, secondo lo schema di Fig. 6.1-7 (da qui il nome usato di ‘rotore ad anelli’). Tali anelli, a loro volta, sono collegati ad un reostato (detto di avviamento) mediante spazzole striscianti. Tale reostato, come sarà meglio chiarito in seguito, ha la duplice funzione di aumentare la coppia e diminuire nel contempo la corrente allo spunto.
a) b)
Fig. 6.1-4
Fig. 6.1-5
Fig. 6.1-6
MACCHINE ASINCRONE 161
! ! !
!
!
!
!
!!
!
!
!!
sistemaanelli-spazzole
avvolgimentidi rotore
reostatotrifase
a
b
c
a
b
c
Fig. 6.1-7
Rebora Liwischtz 2p c1 C2 c2 2 24 31 – 35 18 - 20 - 22 – 28 2 36 41 28 – 46 4 36 41 - 43 – 59 30 – 42 4 48 59 - 67 – 118 38 – 58 6 36 33 - 41 - 43 – 52 28 – 44 6 54 61 – 123 44 - 46 - 62 - 64 – 68 8 48 43 - 53 - 61 – 67 38 – 58 8 96 134 78 - 82 -110 - 114 – 118
Tab. 6.1
Rotore di tipo a gabbia Tale versione è molto diffusa ed è possibile distinguerne tre tipi.
1) Rotore a gabbia semplice. Il tipo più semplice e robusto di avvolgimento rotorico è costituito dalla cosiddetta gabbia di scoiattolo, o semplicemente gabbia. Viene realizzato collocando in ogni cava rotorica un unico conduttore (a seconda dei casi questo sarà a sezione circolare o rettangolare) e collegando fra loro tali conduttori su ambedue i lati del pacco mediante un anello anch’esso conduttore. La gabbia così ottenuta prende la forma indicata nella Fig. 6.1-8.
Il rotore a gabbia, per altro detto anche rotore in cortocircuito, viene in effetti a costituire un sistema indotto provvisto di un rudimentale avvolgimento polifase, con un solo conduttore per polo-fase, con tante fasi quante risultano le sbarre comprese nel doppio passo polare del campo rotante induttore.2 Considerando la gabbia dal punto di vista elettrico si vede come uno degli anelli rappresenti il centro stella che riunisce tutti i principi delle varie fasi e l’altro serva a chiudere in cortocircuito tute le relative fini.
Le sbarre conduttrici, collegate sui due lati dagli anelli, formano tanti circuiti chiusi di resistenza ohmica molto piccola nei quali, durante il funzionamento, circolano le correnti indotte dal campo rotante induttore.
È importante tenere in considerazione che ‘il rotore a gabbia non ha un numero di poli proprio ed assume sempre lo stesso numero di poli del campo induttore’.
Tale caratteristica è spiegata dal fatto che, dato il modo con cui si presenta tale sistema indotto, tutte le sbarre soggette all’azione di uno stesso polo induttore sono sedi di f.e.m. equiverse per cui tali risultano anche le
2 Ciò è vero nel caso in cui il numero delle cave è un numero primo.
anelli
!! !
Fig. 6.1-8
anellialette di
raffreddamento
Fig. 6.1-9
162 Generalità e Cenni Costruttivi
rispettive correnti. In sostanza si può dire che uno stesso rotore a gabbia si adegua all’eventuale variazione del numero dei poli dello statore.
I materiali impiegati nella costruzione delle gabbie sono in genere il rame e l’alluminio. In taluni casi gli anelli che collegano le sbarre di rame possono essere di bronzo o di ottone. Le sbarre in rame sono in genere a sezione circolare nei motori di piccola e media potenza.
Le gabbie in rame, un tempo le uniche usate, sono state oggi quasi completamente sostituite, specie nei motori di piccola potenza, da quelle in alluminio fuso ottenute per colata o per lo più col procedimento di pressofusione. Il procedimento di pressofusione è specialmente conveniente per costruzioni in serie poiché risulta più economico e la fusione riesce più compatta. In ogni caso le gabbie sono fuse in un unico pezzo comprendente le sbarre, gli anelli laterali di cortocircuito e le eventuali alette di raffreddamento che fanno in tal modo corpo con l’anello (Fig. 6.1-9).
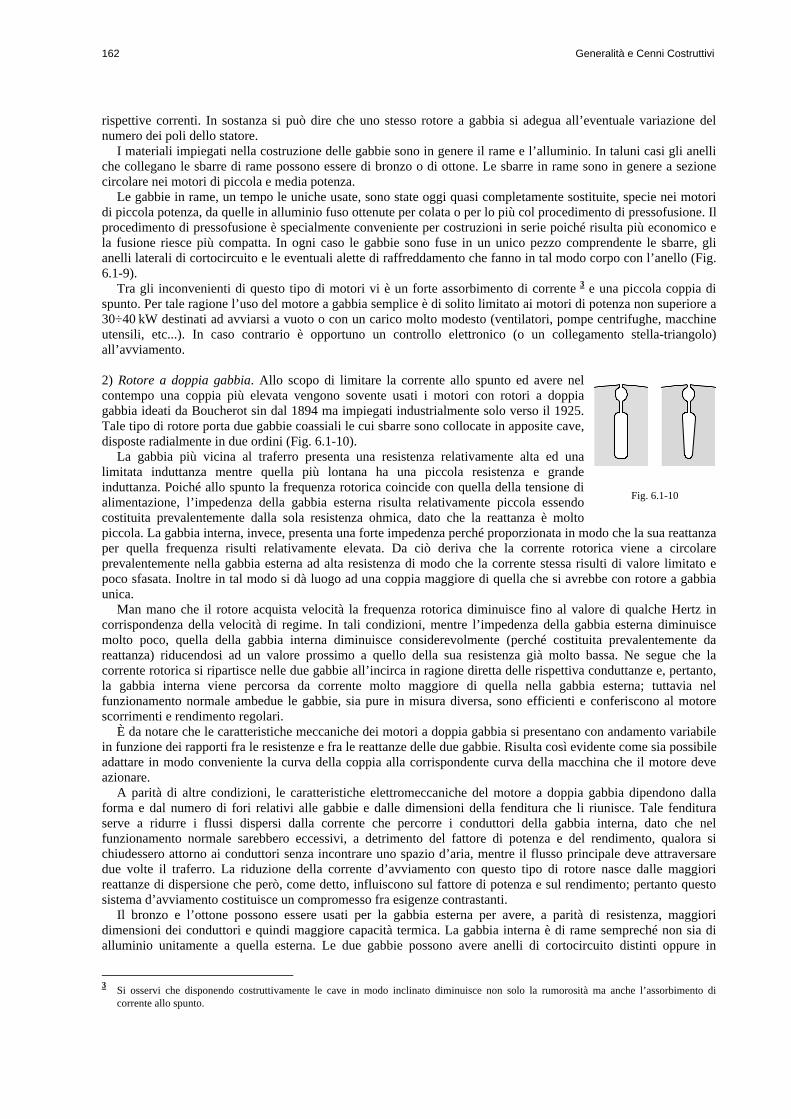
Tra gli inconvenienti di questo tipo di motori vi è un forte assorbimento di corrente 3 e una piccola coppia di spunto. Per tale ragione l’uso del motore a gabbia semplice è di solito limitato ai motori di potenza non superiore a 30÷40 kW destinati ad avviarsi a vuoto o con un carico molto modesto (ventilatori, pompe centrifughe, macchine utensili, etc...). In caso contrario è opportuno un controllo elettronico (o un collegamento stella-triangolo) all’avviamento. 2) Rotore a doppia gabbia. Allo scopo di limitare la corrente allo spunto ed avere nel contempo una coppia più elevata vengono sovente usati i motori con rotori a doppia gabbia ideati da Boucherot sin dal 1894 ma impiegati industrialmente solo verso il 1925. Tale tipo di rotore porta due gabbie coassiali le cui sbarre sono collocate in apposite cave, disposte radialmente in due ordini (Fig. 6.1-10).
La gabbia più vicina al traferro presenta una resistenza relativamente alta ed una limitata induttanza mentre quella più lontana ha una piccola resistenza e grande induttanza. Poiché allo spunto la frequenza rotorica coincide con quella della tensione di alimentazione, l’impedenza della gabbia esterna risulta relativamente piccola essendo costituita prevalentemente dalla sola resistenza ohmica, dato che la reattanza è molto piccola. La gabbia interna, invece, presenta una forte impedenza perché proporzionata in modo che la sua reattanza per quella frequenza risulti relativamente elevata. Da ciò deriva che la corrente rotorica viene a circolare prevalentemente nella gabbia esterna ad alta resistenza di modo che la corrente stessa risulti di valore limitato e poco sfasata. Inoltre in tal modo si dà luogo ad una coppia maggiore di quella che si avrebbe con rotore a gabbia unica.
Man mano che il rotore acquista velocità la frequenza rotorica diminuisce fino al valore di qualche Hertz in corrispondenza della velocità di regime. In tali condizioni, mentre l’impedenza della gabbia esterna diminuisce molto poco, quella della gabbia interna diminuisce considerevolmente (perché costituita prevalentemente da reattanza) riducendosi ad un valore prossimo a quello della sua resistenza già molto bassa. Ne segue che la corrente rotorica si ripartisce nelle due gabbie all’incirca in ragione diretta delle rispettiva conduttanze e, pertanto, la gabbia interna viene percorsa da corrente molto maggiore di quella nella gabbia esterna; tuttavia nel funzionamento normale ambedue le gabbie, sia pure in misura diversa, sono efficienti e conferiscono al motore scorrimenti e rendimento regolari.
È da notare che le caratteristiche meccaniche dei motori a doppia gabbia si presentano con andamento variabile in funzione dei rapporti fra le resistenze e fra le reattanze delle due gabbie. Risulta così evidente come sia possibile adattare in modo conveniente la curva della coppia alla corrispondente curva della macchina che il motore deve azionare.
A parità di altre condizioni, le caratteristiche elettromeccaniche del motore a doppia gabbia dipendono dalla forma e dal numero di fori relativi alle gabbie e dalle dimensioni della fenditura che li riunisce. Tale fenditura serve a ridurre i flussi dispersi dalla corrente che percorre i conduttori della gabbia interna, dato che nel funzionamento normale sarebbero eccessivi, a detrimento del fattore di potenza e del rendimento, qualora si chiudessero attorno ai conduttori senza incontrare uno spazio d’aria, mentre il flusso principale deve attraversare due volte il traferro. La riduzione della corrente d’avviamento con questo tipo di rotore nasce dalle maggiori reattanze di dispersione che però, come detto, influiscono sul fattore di potenza e sul rendimento; pertanto questo sistema d’avviamento costituisce un compromesso fra esigenze contrastanti.
Il bronzo e l’ottone possono essere usati per la gabbia esterna per avere, a parità di resistenza, maggiori dimensioni dei conduttori e quindi maggiore capacità termica. La gabbia interna è di rame sempreché non sia di alluminio unitamente a quella esterna. Le due gabbie possono avere anelli di cortocircuito distinti oppure in
3 Si osservi che disponendo costruttivamente le cave in modo inclinato diminuisce non solo la rumorosità ma anche l’assorbimento di
corrente allo spunto.
Fig. 6.1-10
MACCHINE ASINCRONE 163
comune; la prima soluzione è però migliore in considerazione di un più sicuro collegamento fra sbarre ed anelli in vista delle maggiori dilatazioni termiche delle sbarre della gabbia esterna durante le fasi di avviamento.
Anche gli anelli possono essere di lega di rame di resistività più elevata così da assumere, con le maggiori dimensioni, maggiore capacità termica. Tuttavia molto spesso, specie nei motori di piccola potenza, le due gabbie sono in alluminio; esse sono ottenute col procedimento di pressofusione in unico pezzo che comprende le sbarre, gli istmi nelle fessure fra cave interne ed esterne, gli anelli di cortocircuito (in questo caso in comune alle due gabbie) e le eventuali alette di ventilazione.
Il motore a doppia gabbia ha, rispetto ad uno a gabbia semplice, un fattore di potenza più basso ed una minore capacità di sovraccarico. Tali svantaggi, in verità poco sentiti se il motore è ben progettato, sono causati dalla maggiore distanza dell’avvolgimento induttore (statorico) dalla gabbia interna (quella che dà il maggiore contributo di coppia in funzionamento normale) originante una maggiore dispersione. I motori a doppia gabbia vengono in genere costruiti per potenze non superiori ai 150÷200 kW.
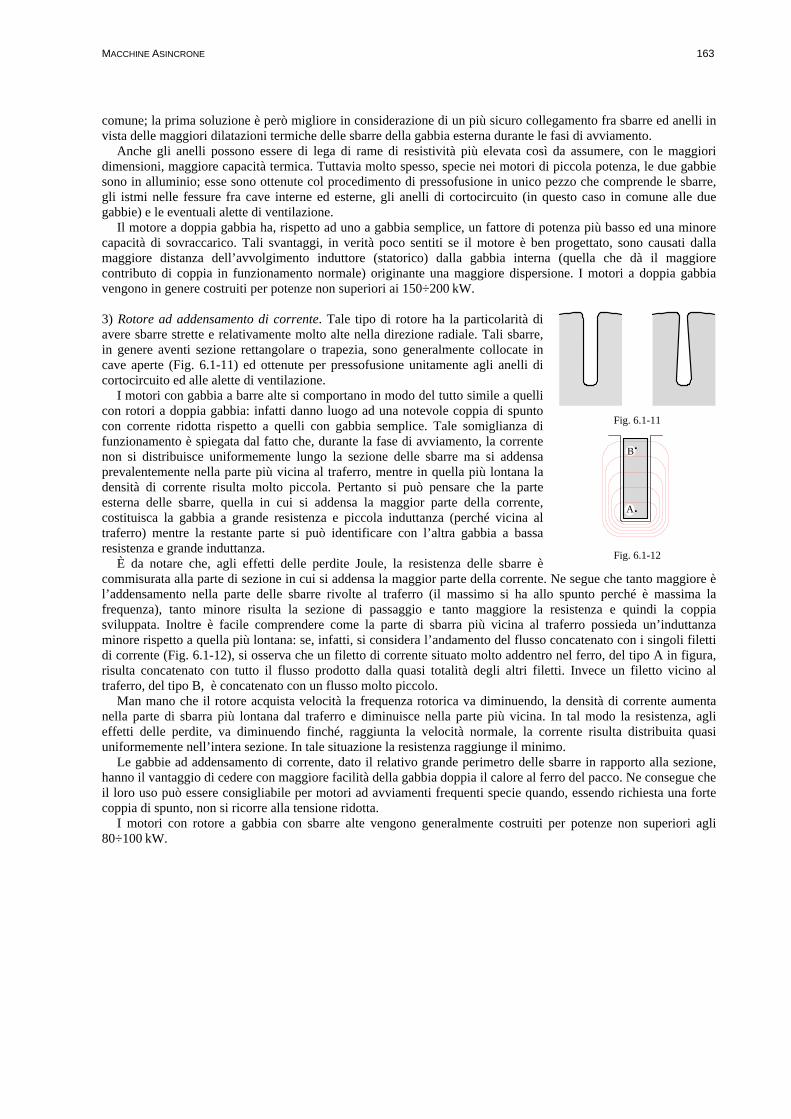
3) Rotore ad addensamento di corrente. Tale tipo di rotore ha la particolarità di avere sbarre strette e relativamente molto alte nella direzione radiale. Tali sbarre, in genere aventi sezione rettangolare o trapezia, sono generalmente collocate in cave aperte (Fig. 6.1-11) ed ottenute per pressofusione unitamente agli anelli di cortocircuito ed alle alette di ventilazione.
I motori con gabbia a barre alte si comportano in modo del tutto simile a quelli con rotori a doppia gabbia: infatti danno luogo ad una notevole coppia di spunto con corrente ridotta rispetto a quelli con gabbia semplice. Tale somiglianza di funzionamento è spiegata dal fatto che, durante la fase di avviamento, la corrente non si distribuisce uniformemente lungo la sezione delle sbarre ma si addensa prevalentemente nella parte più vicina al traferro, mentre in quella più lontana la densità di corrente risulta molto piccola. Pertanto si può pensare che la parte esterna delle sbarre, quella in cui si addensa la maggior parte della corrente, costituisca la gabbia a grande resistenza e piccola induttanza (perché vicina al traferro) mentre la restante parte si può identificare con l’altra gabbia a bassa resistenza e grande induttanza.
È da notare che, agli effetti delle perdite Joule, la resistenza delle sbarre è commisurata alla parte di sezione in cui si addensa la maggior parte della corrente. Ne segue che tanto maggiore è l’addensamento nella parte delle sbarre rivolte al traferro (il massimo si ha allo spunto perché è massima la frequenza), tanto minore risulta la sezione di passaggio e tanto maggiore la resistenza e quindi la coppia sviluppata. Inoltre è facile comprendere come la parte di sbarra più vicina al traferro possieda un’induttanza minore rispetto a quella più lontana: se, infatti, si considera l’andamento del flusso concatenato con i singoli filetti di corrente (Fig. 6.1-12), si osserva che un filetto di corrente situato molto addentro nel ferro, del tipo A in figura, risulta concatenato con tutto il flusso prodotto dalla quasi totalità degli altri filetti. Invece un filetto vicino al traferro, del tipo B, è concatenato con un flusso molto piccolo.
Man mano che il rotore acquista velocità la frequenza rotorica va diminuendo, la densità di corrente aumenta nella parte di sbarra più lontana dal traferro e diminuisce nella parte più vicina. In tal modo la resistenza, agli effetti delle perdite, va diminuendo finché, raggiunta la velocità normale, la corrente risulta distribuita quasi uniformemente nell’intera sezione. In tale situazione la resistenza raggiunge il minimo.
Le gabbie ad addensamento di corrente, dato il relativo grande perimetro delle sbarre in rapporto alla sezione, hanno il vantaggio di cedere con maggiore facilità della gabbia doppia il calore al ferro del pacco. Ne consegue che il loro uso può essere consigliabile per motori ad avviamenti frequenti specie quando, essendo richiesta una forte coppia di spunto, non si ricorre alla tensione ridotta.
I motori con rotore a gabbia con sbarre alte vengono generalmente costruiti per potenze non superiori agli 80÷100 kW.
Fig. 6.1-11
!A
!B
Fig. 6.1-12

164 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
6.2 MODELLO STATICO E RETE EQUIVALENTE DELLA MACCHINA ASINCRONA TRIFASE CON ROTORE AVVOLTO
Si vuole determinare un modello matematico statico e la relativa rete equivalente della macchina asincrona con rotore avvolto. Con il termine statico si indica una condizione di regime sia meccanico, velocità angolare del rotore costante, che elettrico, grandezze elettriche sinusoidali. Si farà riferimento ad avvolgimenti di statore e di rotore ideali e collegati a stella.
Per meglio comprendere il funzionamento della macchina asincrona verrà prima analizzata la condizione operativa con rotore fermo e fasi di rotore aperte, verrà poi studiato il funzionamento con rotore fermo e fasi di rotore in corto circuito e sarà infine analizzato il funzionamento della macchina con rotore in movimento.
6.2.1 MACCHINA ASINCRONA A ROTORE BLOCCATO: FUNZIONAMENTO A VUOTO
Si consideri una macchina asincrona con gli avvolgimenti di statore alimentati da un sistema trifase simmetrico di tensioni a frequenza costante. Il rotore sia fermo e le fasi rotoriche aperte. In Fig. 6.2-1 è riportata schematicamente una sezione trasversale di una macchina asincrona trifase. Nelle ipotesi sopra dette la macchina si comporta come un trasformatore trifase a vuoto: lo statore è il primario e il rotore fermo è il secondario.
Si trascurino per il momento le resistenze degli avvolgimenti, i flussi dispersi e le perdite nel circuito magnetico.
Nella condizione di funzionamento descritta e con le ipotesi fatte, lo statore assorbe le seguenti correnti magnetizzanti: 4
( ) ( )( ) ( )( ) ( )34osˆ
32cosˆ
cosˆ
π−α+ω=
π−α+ω=
α+ω=
µµ
µµ
µµ
ssc
ssb
ssa
tcIti
tIti
tIti
(6.2-1)
Il sistema equilibrato delle correnti magnetizzanti (6.2-1) produce un’onda sinusoidale di f.m.m. al traferro che ruota con velocità angolare meccanica ω/p, detta velocità sincrona. Se il riferimento angolare fisso viene scelto in modo tale che ϑm = 0 individui la posizione dell'asse magnetico della fase a di statore, tale onda è rappresentata dalla funzione:
( ) ( ) ( )F Fs s s s s st t n I tϑ ω α ϑ ω α ϑµ, $ cos $ cos= + − = + −32
3 22
(6.2-2)
essendo Iµs il valore efficace delle correnti magnetizzanti. È stato visto che a tale f.m.m. rotante si può associare un fasore in fase con quello della corrente della prima
fase:
& $ &Fs s an I=32 µ (6.2-3)
con &I Ia ss
µ µα= e j .
Alla f.m.m. rotante corrisponde una distribuzione di induzione magnetica rotante al traferro:
4 Le correnti magnetizzanti di una macchina asincrona trifase formano un sistema equilibrato dato che i circuiti magnetici relativi ai
corrispondenti tre flussi sono identici. D’altra parte la forma d’onda della corrente magnetizzante è quasi sinusoidale poiché, a causa della presenza del traferro, le armoniche di corrente non possono essere di entità apprezzabile.
asse magnetico fase a
a
a'
b'
b
c'
c
!
! !
!
!
!
ϑ m = 0
asse magnetico fase A
A
A'B
B'
CC'
ϑ mA
Fig. 6.2-1

MACCHINE ASINCRONE 165
( ) ( ) ( ) ( )B t t n I t B tse
se
s s s s sϑµδ ϑ
µδ ω α ϑ ω α ϑµ, , $ $= = + − = + −0 03 2
2F cos cos (6.2-4)
rappresentabile anch’essa con un fasore in fase con quello della corrente della prima fase:
& & $ &B n Ise
se
s a= =µδ
µδ µ
0 032F (6.2-5)
È stato inoltre trovato che il flusso concatenato mutuo con la fase a è:
λ π ω α µδ
π ω α
µδ
π ω α µδ
π ω α
µ
µ µ
am s s s se
s s s
es s s
es s s
t r L n B t r L n n I t
r L n I t r L n I t
( ) = + = + =
= + = +
22
2 3 22 2
3 22
32
0
0 2 0 2
$ $ cos( ) $ $ cos( )
$ cos( ) $ $ cos( ) (6.2-6)
Il flusso concatenato con la fase a è quindi in fase con la corrente della fase a (lo stesso è vero anche per le altre fasi). I fasori che rappresentano la corrente iµa(t) e il flusso concatenato λam(t) sono quindi in fase:
& $ & &Λame
s a s ar L n I L I= =32
0 2µδ
πµ δ µ (6.2-7)
Nella (5.2-7) la Lδs è l'induttanza di magnetizzazione della macchina riferita allo statore:
L r L n r L Np
Np
r Lse
se
se
e
seδ
µδ
π µδ π
π µδ π
= = =32
3 44 2
32
40 2 02
2
2
20
2
2$ (6.2-8)
avendo sostituito $n Npsse= 4
2π, valida per un avvolgimento reale.
È necessario puntualizzare alcuni aspetti sull'induttanza di magnetizzazione appena definita. In primo luogo, pur essendo una induttanza di fase (è la costante di proporzionalità tra il flusso concatenato di fase e la corrente di fase) essa tiene implicitamente conto del fatto che l'avvolgimento è trifase. Basti pensare che il campo rotante dipende dalla compresenza delle tre correnti. Nel caso fosse presente una sola corrente si troverebbe infatti una induttanza di magnetizzazione pari a 2Lδs /3 ed il campo sarebbe alternativo.
In secondo luogo la Lδs è dovuta esclusivamente alla riluttanza del traferro in quanto, nel passare dalla f.m.m. all'induzione magnetica, si è considerata infinita la permeabilità del ferro. In effetti la relazione tra flusso concatenato e corrente è quello di Fig. 6.2-2 e la Lδs rappresenta il rapporto tra flusso concatenato e corrente nel tratto lineare, in cui, essendo il ferro non saturo, la totale riluttanza del circuito magnetico è praticamente coincidente con quella del traferro.
Per quanto riguarda il fasore della f.e.m. indotta nella fase a dal flusso principale si ha (C.d.U.):
& &Ea am0 = jωΛ (6.2-9)
Se si trascura la saturazione si ottiene:
& & & &E L I X Ia am s a s a0 = = =j j jω ω δ µ δ µΛ (6.2-10)
In presenza di saturazione si usa la (5.2-9) considerando il legame corrente-flusso concatenato di Fig. 5.2-2 o si può porre:
& & & &E L I X Ia am s a s a0 = = =j j jω ω µ µ µ µΛ( (
(6.2-11)
in cui (L sµ , che rappresenta l'induttanza di magnetizzazione riferita allo statore di tutto il circuito magnetico,
dipende dallo stato di saturazione magnetica e non è pertanto costante. Si consideri ora la fase A di rotore, il cui asse magnetico sia nella posizione angolare ϑmA. Il flusso con essa
concatenato è pari a:
O
[Wb]Λ
[A]Iµ Fig. 6.2-2

166 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
ϑ = 0
asse magneticodi
asse magneticodi (t )i a
mA ϑ
ϑ
(t )i A
ϑ = 0m,r ϑm,r
m
m
Fig. 6.2-3
λ π ω α ϑ µδ
π ω α ϑ
µδ
π ω α ϑ µδ
π ω α ϑ
µ
µ µ
Am r s s mA re
s s s mA
er s s s mA
er s s s mA
t r L n B t p r L n n I t p
r L n n I t p r L n n I t p
( ) = + − = + − =
= + − = + −
22
2 3 22 2
3 22
32
0
0 0
$ $ cos( ) $ $ cos( )
$ $ cos( ) $ $ $ cos( ) (6.2-12)
Il flusso concatenato con la fase A di rotore è quindi in ritardo rispetto alla corrente della fase a di statore di un angolo elettrico pϑmA a causa del non allineamento dei due assi magnetici (Fig. 6.2-3). Il fasore di tale flusso può essere espresso come:
& &Λ Am rs apM I mA= −
µϑe j (6.2-13)
avendo definito l’induttanza mutua:
MI
r L n n r L N Np
N Np
r L NN
LrsAm
a er s
e
re se
e
re se re
ses= = = = =Λ
µδ
µδ
π µδ π
π µδ π
32
3 44 2
32
40 02
2 20
2$ $ (6.2-14)
Sulla base della (5.2-14) e della (5.2-13) si può scrivere:
& &Λ Amre
ses a
pNN L I mA= −
δ µϑe j (6.2-15)
Per quanto riguarda il fasore della f.e.m. indotta nella fase A di rotore dal flusso principale si ha (C.d.U.):
AmAE Λω= && j0 (6.2-16)
Se si trascura la saturazione si ottiene:
& & & &E NN
L I NN
X IA Amre
ses a
p re
ses a
pmA mA0 = = =− −j j e j ej jω ω δ µ
ϑδ µ
ϑΛ (6.2-17)
In presenza di saturazione si usa la (5.2-16) considerando il legame corrente-flusso concatenato di Fig. 5.2-2 o si può porre:
& & & &ENN L I
NN X IA Am
re
ses a
p re
ses a
pmA mA0 = = =− −j j e j ej jω ω µ µ
ϑµ µ
ϑΛ( (
(6.2-18)
Sia in presenza che in assenza di saturazione il rapporto tra le f.e.m. indotte vale:
&
&EE
NN ka
A
se
re
pv
pmA mA0
0= =e ej jϑ ϑ (6.2-19)
avendo indicato con
k NNv
se
re= (6.2-20)

MACCHINE ASINCRONE 167
il rapporto tra il numero di spire equivalenti di statore e quello di rotore.
Si è quindi trovato che le f.e.m. indotte non sono tra loro in fase a causa del non allineamento degli assi magnetici delle fasi di rotore con quelli di statore.
Per come è stato scelto il riferimento angolare infatti, il fasore del flusso concatenato &Λam è in fase con quello della corrente &I aµ e
quello del flusso principale &Φm0 ed il fasore della f.e.m. &Ea0 è pertanto sempre in anticipo di π/2 rispetto a tali fasori.
Al contrario, il flusso concatenato mutuo con la fase A di rotore &Λ Am può assumere qualsiasi posizione rispetto al flusso mutuo &Φm0 , essendo in ritardo rispetto ad esso dell’angolo elettrico pϑmA.
Poiché la f.e.m. indotta nella fase A di rotore 0AE& è sempre in
anticipo di π/2 rispetto a &Λ Am , lo stesso sfasamento si ritrova tra le f.e.m. indotte. La situazione è illustrata in Fig. 6.2-4.
Poiché non sono presenti cadute di tensione sugli avvolgimenti, la tensione di alimentazione è uguale alla f.e.m. indotta dal flusso principale. Con riferimento alla fase a si ottengono quindi le seguenti equazioni:
asamaa IXEV µµΛω &(
&&& jj === 0 (6.2-21)
&
&EE
ka
Av
p mA0
0= e j ϑ (6.2-22)
alle quali corrisponde la rete di Fig. 6.2-5 ed il diagramma dei fasori di Fig. 6.2-6.
Il flusso finora considerato è quello mutuo, cioè quello che attraversando il traferro si concatena con gli avvolgimenti di rotore (linee di flusso 2 di Fig. 6.2-7). Le correnti di statore generano però anche dei flussi che si richiudono senza attraversare il traferro e che, non concatenandosi con gli avvolgimenti di rotore, sono flussi dispersi (linee di flusso 1 di Fig. 6.2-7).
Tali flussi si concatenano con i conduttori della fase che li genera e si svolgono principalmente in aria. Ne segue che il flusso che si concatena con la fase che lo genera risulta essere con buona appros-simazione proporzionale alla corrente che circola nella fase stessa.
Pertanto, con riferimento alla fase a di statore, si potrà scrivere:
λ µad ds at L i t( ) ( )= (6.2-23)
in cui Lds è l’induttanza di dispersione di statore, costante e considerata uguale per le tre fasi. Se si considera inoltre la resistenza elettrica della fase Rs, la tensione di alimentazione di fase è pari alla somma
della f.e.m. indotta dal flusso principale, della caduta di tensione sull'induttanza di dispersione e della caduta di tensione sulla resistenza. In regime sinusoidale si ottiene quindi il seguente bilancio delle tensioni:
( )& & & & & &V R I L I E R X I Ea s a ds a a s ds a a= + + = + +µ µ µωj j0 0 (6.2-24)
con
& &E X Ia s a0 = j(
µ µ (6.2-25)
Per il bilancio delle tensioni di rotore si ha:
& &V EA A= 0 (6.2-26)
con
α
Λ am!
I!
Re
Im
a Λ Am!
ϑ mAp
α ϑmAp−
EA!
Ea!
Φm!
00
0
ϑmAp µ
ss
Fig. 6.2-4
X s
k v
VA!
Va!
Ea!
EA!
I a!
! !
0 0
(
e j p mAϑ
µ
µ
Fig. 6.2-5
Φm!
Ea!
I!
0
Λ am!
EA!
0Va
!
ϑmAp
=
0aµ
Fig. 6.2-6
1 1 12 2
2: linee di flusso mutuo1: linee di flusso disperso
ϕ mϕ d
Fig. 6.2-7
168 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
&&
EE
kAa
vp mA00=
e j ϑ (6.2-27)
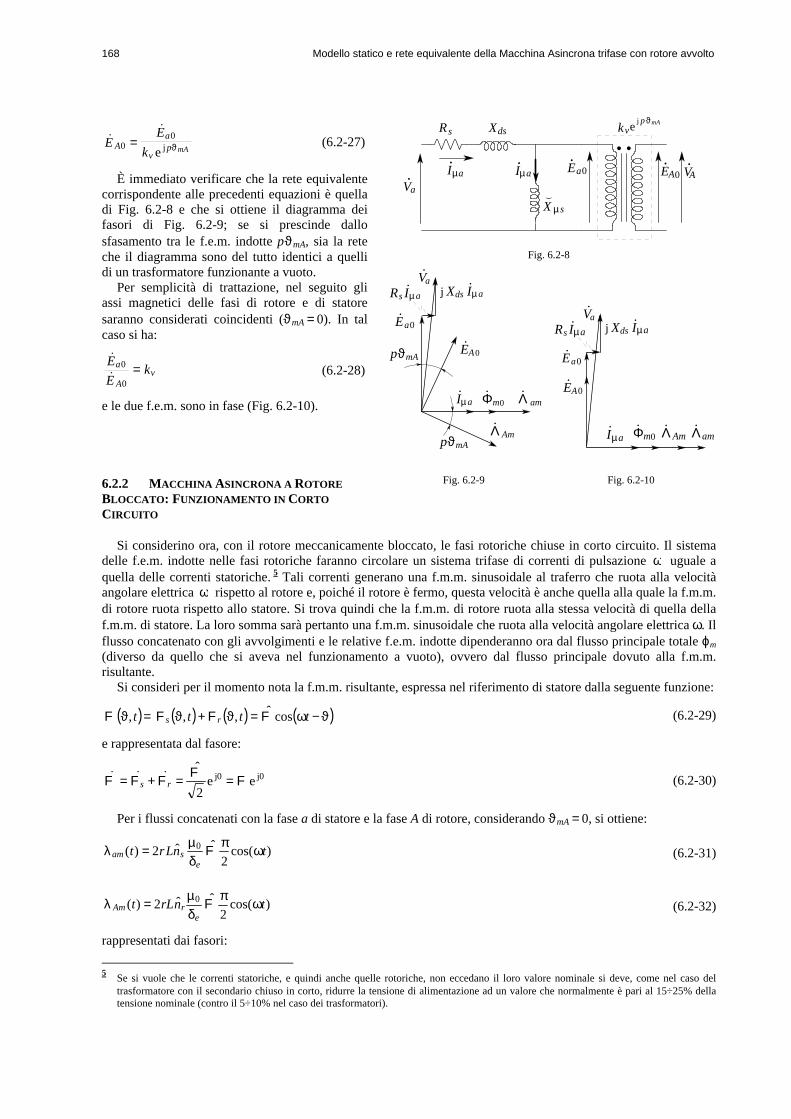
È immediato verificare che la rete equivalente corrispondente alle precedenti equazioni è quella di Fig. 6.2-8 e che si ottiene il diagramma dei fasori di Fig. 6.2-9; se si prescinde dallo sfasamento tra le f.e.m. indotte pϑmA, sia la rete che il diagramma sono del tutto identici a quelli di un trasformatore funzionante a vuoto.
Per semplicità di trattazione, nel seguito gli assi magnetici delle fasi di rotore e di statore saranno considerati coincidenti (ϑmA = 0). In tal caso si ha:
&
&EE
ka
Av
0
0= (6.2-28)
e le due f.e.m. sono in fase (Fig. 6.2-10).
6.2.2 MACCHINA ASINCRONA A ROTORE BLOCCATO: FUNZIONAMENTO IN CORTO CIRCUITO
Si considerino ora, con il rotore meccanicamente bloccato, le fasi rotoriche chiuse in corto circuito. Il sistema delle f.e.m. indotte nelle fasi rotoriche faranno circolare un sistema trifase di correnti di pulsazione ω uguale a quella delle correnti statoriche. 5 Tali correnti generano una f.m.m. sinusoidale al traferro che ruota alla velocità angolare elettrica ω rispetto al rotore e, poiché il rotore è fermo, questa velocità è anche quella alla quale la f.m.m. di rotore ruota rispetto allo statore. Si trova quindi che la f.m.m. di rotore ruota alla stessa velocità di quella della f.m.m. di statore. La loro somma sarà pertanto una f.m.m. sinusoidale che ruota alla velocità angolare elettrica ω. Il flusso concatenato con gli avvolgimenti e le relative f.e.m. indotte dipenderanno ora dal flusso principale totale ϕm (diverso da quello che si aveva nel funzionamento a vuoto), ovvero dal flusso principale dovuto alla f.m.m. risultante.
Si consideri per il momento nota la f.m.m. risultante, espressa nel riferimento di statore dalla seguente funzione:
( ) ( ) ( ) ( )ϑ−ω=ϑ+ϑϑ tttt rs cosˆ,,, FFF=F (6.2-29)
e rappresentata dal fasore:
0j0j ee2
ˆFFFFF ==+= rs
&&& (6.2-30)
Per i flussi concatenati con la fase a di statore e la fase A di rotore, considerando ϑmA = 0, si ottiene:
)cos(2
ˆˆ2)( 0 tnLrte
sam ωπδµ=λ F (6.2-31)
)cos(2
ˆˆ2)( 0 tnrLte
rAm ωπδµ=λ F (6.2-32)
rappresentati dai fasori: 5 Se si vuole che le correnti statoriche, e quindi anche quelle rotoriche, non eccedano il loro valore nominale si deve, come nel caso del
trasformatore con il secondario chiuso in corto, ridurre la tensione di alimentazione ad un valore che normalmente è pari al 15÷25% della tensione nominale (contro il 5÷10% nel caso dei trasformatori).
Rs Xds kv
VA!
Va!
Ea!
EA!
I!
! !
0 0
X(
I!
e j p mAϑ
aµ aµ
sµ
Fig. 6.2-8
Φm!
Ea!
Va!
Rs I!
j ds I!
X
0
I!
EA!
0ϑmAp
0
Λ Am!
Λ am!
ϑmAp
aµ
aµaµ
Φm!
Ea!
Va!
Rs I!
j ds I!
X
0
I!
EA!
0
0 Λ Am!
Λ am!
aµaµ
aµ
Fig. 6.2-9 Fig. 6.2-10

MACCHINE ASINCRONE 169
FFF &&&s
ses
esam L
nnrLnrL δ=π
δµ=π
δµ=Λ ˆ3
22
ˆ2e2
ˆ
2ˆ2 00j0 (6.2-33)
FFF &&&rs
ser
erAm nL
nnrLnrL ˆ
ˆ32
2ˆ2e
2
ˆ
2ˆ2 2
00j0δ=π
δµ=π
δµ=Λ (6.2-34)
Per quanto riguarda le f.e.m. indotte si hanno pertanto i seguenti fasori (Fig. 6.2-11):
F&&&s
sama L
nE δω=Λω=
ˆ32jj (6.2-35)
F&&&rs
sAmA nL
nE ˆ
ˆ32jj 2 δω=Λω= (6.2-36)
Ovviamente vale ancora:
vre
se
r
s
A
a kNN
nn
EE === ˆ
ˆ&
& (6.2-37)
Poiché le fasi di rotore sono chiuse in corto circuito, la f.e.m. AE&
farà circolare una corrente di fase AI& che dipenderà dall’impedenza della fase di rotore:
drrdrrr XRLRZ jj +=ω+=& (6.2-38)
essendo Rr la resistenza elettrica della fase di rotore e Ldr6
l’induttanza di dispersione di rotore, relativa al flusso di rotore che non si concatena con gli avvolgimenti di statore (flusso disperso di rotore).
Indicando con
( )rdrr RXarctn=γ (6.2-39)
l’angolo caratteristico di rZ& , per il verso di riferimento scelto (Fig. 6.2-12), il fasore della corrente della fase A di rotore:
)2/(je r
r
A
r
AA Z
EZEI γ+π−=−=&
&& (6.2-40)
è in ritardo di rγ rispetto a AE&− (Fig. 6.2-13). La f.m.m. rotante generata dalle tre correnti di rotore è quindi rappresentata dal fasore (pϑmA = 0):
Arr In && ˆ23=F (6.2-41)
in fase con la corrente AI& (Fig. 6.2-13).
6 Anche le correnti di rotore danno luogo a flussi che non si concatenano con gli avvolgimenti di statore.
ϕmϕds
ϕdr
! ! !
++++ ++++ ++++
AE&aE&
F& AmΛ& amΛ&
Fig. 6.2-11
kv
Ea!
EA!
! !
R r drX
IA!
k i
Fig. 6.2-12
F!
Ea!
Λ am!
EA!
Λ Am!
EA!
−
IA!
γrF
!
r
F!
r−
F!
s
Fig. 6.2-13
F
ϑ
( )ϑ,ts F ( )ϑ,tr
F ( )ϑ,t
Fig. 6.2-14

170 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
Normalmente la reattanza di dispersione del rotore è più grande della resistenza (Xdr > 2Rr) e l’angolo γr risulta essere pertanto maggiore di 60°-70°. La f.m.m. di rotore è quindi quasi in opposizione di fase rispetto alla f.m.m. di statore e la loro somma è relativamente piccola. Tale situazione è rappresentata in termini di onde al traferro in Fig. 6.2-14.
Esprimendo anche la f.m.m. generata dalle correnti di statore in funzione della corrente della fase a:
ass In && ˆ23=F (6.2-42)
si ottiene:
Arasrs InIn &&&&& ˆ23ˆ
23 +=+ FF=F (6.2-43)
As
r
sa I
nn
nI &
&&
2/ˆ32/ˆ3
2/ˆ3−= F (6.2-44)
che mette in evidenza come la corrente statorica sia costituita da due componenti: la componente magnetizzante:
2/ˆ3 sa n
I F&& =µ (6.2-45)
e la componente:
Ai
As
rA I
kI
nnI &&& 1ˆˆ
−=−=′ (6.2-46)
che rappresenta la ‘componente di carico’ della corrente statorica, ovvero la corrente di rotore riportata allo statore.
Nel caso in cui il numero delle fasi di statore è ms e quello delle fasi di rotore è mr si ha:
Ai
Ass
rrA I
kI
nmnmI &&& 1
2/ˆ2/ˆ
−=−=′ (6.2-47)
con
vr
s
rer
ses
rr
ssi k
mm
NmNm
nmnmk === ˆˆ
(6.2-48)
Il rapporto in corrente è uguale a quello in tensione soltanto nel caso in cui lo statore ed il rotore abbiano lo stesso numero di fasi.
Poste le precedenti definizioni, la (5.2-44) si scrive:
Aaa III ′+= µ&&& (6.2-49)
Ai fini della deduzione della rete equivalente, se si sostituisce (eq. (5.2-45)):
as In µ= && ˆ23F (6.2-50)
nella (5.2-35), si ottiene:
asasss
ss
a ILInLn
Ln
E µδµδδ ω=ω=ω= &&&& jˆ23
ˆ32jˆ3
2j F (6.2-51)
ovvero, considerando la saturazione:
asasa IXILE µµµµ =ω= &(
&(
& jj (6.2-52)
In conclusione, con riferimento alla fase a di statore ed alla fase A di rotore, le equazioni che descrivono il funzionamento della macchina a rotore bloccato ed in corto circuito sono le seguenti:

MACCHINE ASINCRONE 171
( )( )
+=
++=
++=
µaAa
AAdrr
aadssa
III
EIXR
EIXRV
&&&
&&
&&&
'
j0
j
(6.2-53)
Le equazioni scritte sono praticamente simili a quelle già viste per il trasformatore con il secondario in corto circuito.
Nelle condizioni descritte la macchina asincrona si comporta come un trasformatore trifase in corto circuito. È opportuno comunque sottolineare il fatto che mentre nel trasformatore trifase vi sono tre flussi distinti, uno per ogni fase, nella macchina asincrona vi è un unico flusso rotante che concatena successivamente conduttori appartenenti a fasi diverse.
Le equazioni (6.2-53) insieme alla (6.2-52) sono rappresentate dalla rete equivalente di Fig. 6.2-15 e ad esse corrisponde il diagramma dei fasori di Fig. 6.2-16.
Utilizzando il rapporto in tensione kv ed il rapporto in corrente ki si può dedurre la rete equivalente con le grandezze rotoriche riferite allo statore. A tale scopo è sufficiente osservare che per le tensioni si ha semplicemente:
′ = =& & &E k E EA v A a (6.2-54)
Quando si riduce allo statore la resistenza rotorica Rr occorre tener presente che le perdite nel rame rotorico devono risultare invariate; di conseguenza deve risultare:
rAsrAr RImRIm ′′= 22 (6.2-55)
da cui:
rA
A
s
rr R
II
mmR
2
′
=′ (6.2-56)
che per la (6.2-46) diventa:
rtrvirvr
srv
r
s
s
rr RkRkkRk
mmRk
mm
mmR 22
2
===
=′ (6.2-57)
con vit kkk = . Per la riduzione allo statore della reattanza di dispersione
Xdr è sufficiente osservare che l’angolo caratteristico dell’impedenza di rotore γr deve risultare indipendente da tale riduzione; pertanto deve essere:
r
dr
r
drr R
XRX
′′
==γ )tan( (6.2-58)
da cui:
rrdrdr RRXX ′=′ (6.2-59)
che, per la (5.2-57), diventa:
Rs Xds kv
Ea!
EA!
Ia!
! !
X(
I!
R r drX
IA!
k iI'A!
aµ
sµ
Va!
Fig. 6.2-15
Ea!
Φm!
EA!
EA!
−
IA!
γr
I'A!
I a!
Ia!
Ia!
Rs
Ia!
X dsjVa
!
IA!
Rr
IA!
X drj
µ
Fig. 6.2-16
Rs Xds
Va!
Ea!
E'A!
Ia!
X(
I!
R'r drX'I'A!
=aµ
sµ
Fig. 6.2-17
Ea!
Φm!
E'A!
I'A!
I!
Ia!
Ia!
Rs
Ia!
X dsjVa
!
I'A!
R'r
I'A!
X'drj
=
aµ Fig. 6.2-18

172 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
drtdr XkX 2=′ (6.2-60)
Il fattore di riduzione per le reattanze è quindi lo stesso di quello delle resistenze. Tenendo conto di quanto sopra detto, la rete equivalente della macchina asincrona a rotore bloccato di Fig. 6.2-
15, riferendo le grandezze rotoriche allo statore, si modifica in quella di Fig. 6.2-17, alla quale corrisponde il diagramma dei fasori di Fig. 6.2-18.
6.2.3 LA MACCHINA ASINCRONA CON ROTORE IN MOVIMENTO
Si supponga che il rotore di una macchina asincrona, alimentata con una terna simmetrica diretta di tensione, sia fermo ma libero di ruotare.
Il campo rotante alla velocità sincrona generato dalle correnti di statore, concatenandosi con le spire dell’avvolgimento rotorico, vi induce f.e.m. che nelle fasi rotoriche, chiuse in corto circuito, faranno circolare una terna equilibrata di correnti. I conduttori attivi di rotore, essendo percorsi da correnti e immersi nel campo magnetico di statore, risultano quindi sollecitati da una forza diretta tangenzialmente al rotore e di verso tale, per la legge di Lenz, da opporsi al moto relativo tra campo rotante e rotore. Complessivamente il rotore risulta sollecitato da una coppia diretta nello stesso verso di rotazione del campo rotante. Risulta infatti evidente che, partendo dalla posizione di riposo, per ridurre il movimento relativo tra campo rotante statorico e rotore occorre che quest’ultimo ruoti nello stesso verso del campo rotante.
In conclusione si può affermare che il rotore sarà sollecitato da una coppia che, se risulterà superiore alla coppia resistente dovuta all’attrito, alla ventilazione e ad un’eventuale coppia del carico meccanico, farà girare il rotore nello stesso verso del campo rotante di statore.
La velocità di rotazione ωm risulterà in ogni caso inferiore a quella del campo rotante stesso: infatti se il rotore raggiungesse la velocità sincrona ω/p si annullerebbe il movimento relativo tra campo e rotore e di conseguenza sarebbero nulle le f.e.m. indotte, le correnti e la coppia motrice, indispensabile per controbilanciare la coppia resistente. Il fatto che il rotore abbia una velocità diversa da quella del campo rotante statorico si esprime dicendo che tra i due c’è uno ‘scorrimento’:
ωω−ω=
ωω−ω= mm p
pps (6.2-61)
Dalla (6.2-62) si può ricavare la velocità meccanica del rotore in funzione dello scorrimento e della velocità meccanica sincrona ω/p:
psm ω−=ω )1( (6.2-62)
Se si indica con ns il numero di giri al minuto sincrono del campo rotante e con n il numero di giri al minuto del rotore, si avrà:
pns
ωπ
=260 (6.2-63)
mn ωπ
=260 (6.2-64)
e le relazioni (6.2-62) e (6.2-63) possono essere scritte:
s
s
nnns −= (6.2-65)
snsn )1( −= (6.2-66)
n
s
0 nsns−
012
ωmω /pω /p−
Fig. 6.2-19

MACCHINE ASINCRONE 173
Dalla relazione (6.2-66) si ottiene quindi che quando il rotore ruota alla velocità sincrona (n = ns) lo scorrimento vale zero, mentre quando il rotore è fermo (n = 0), lo scorrimento è unitario. La corrispondenza tra n ed s può essere rappresentata graficamente dalla Fig. 5.2-19.
Si supponga che il rotore ruoti ad una generica velocità ωm, alla quale corrisponda uno scorrimento s. Le correnti di rotore generano anche in questo caso un’onda sinusoidale di f.m.m. rotante a p coppie polari ( )Fr tϑ , . Si può pertanto porre:
( ) ( ) ( )ttt rs ,,, ϑ+ϑϑ FF=F (6.2-67)
Ci si pone ora il problema di passare dalla relazione (6.2-68), sempre valida, alla corrispondente relazione in termini di fasori:
rs FF=F &&& + (6.2-68)
Ciò è lecito soltanto se le f.m.m. di statore e di rotore ruotano alla stessa velocità. Soltanto in tal caso la loro somma è pari ad un’onda sinusoidale di f.m.m. che ruota ancora alla stessa velocità.
Si ipotizzi che tale condizione sia verificata e che quindi si abbia una f.m.m. risultante che ruota, rispetto allo statore, alla stessa velocità della f.m.m. di statore ω/p (unica velocità nota a priori).
È stato trovato che in questa situazione la pulsazione elettrica delle f.e.m. indotte nell’avvolgimento rotante è pari a sω. Ovviamente le correnti di rotore, essendo dovute a tali f.e.m. indotte, avranno la stessa pulsazione sω e generano quindi una f.m.m. rotante, rispetto al rotore, con velocità meccanica s⋅(ω/p).
Per determinare la velocità di rotazione della Fr(ϑ ,t) rispetto allo statore, è necessario sommare alla velocità relativa s⋅(ω/p), quella del rotore stesso ωm (velocità del riferimento):
ppspsps m ω=ω−+ω=ω+ω )()1()()(
La f.m.m. generata dalle correnti di rotore ruota quindi alla velocità sincrona e ciò è vero qualunque sia la velocità di rotazione del rotore ωm.
Poiché le f.m.m. di statore e di rotore ruotano alla stessa velocità meccanica ω/p, anche la loro risultante ruota alla stessa velocità e quindi è verificata l’ipotesi di partenza.
Per quanto riguarda lo statore quindi non è cambiato nulla rispetto al caso di rotore fermo. Infatti con la fase a di statore si concatena ancora un flusso rappresentato dal fasore:
FFF &&&s
ses
esam L
nnrLnrL δ=π
δµ=π
δµ=Λ ˆ3
22
ˆ2e2
ˆ
2ˆ2 00j0 (6.2-69)
in fase con quello della f.m.m. risultante F& e per la f.e.m. indotta si ottiene ancora:
F&&&s
sama L
nE δω=Λω=
ˆ32jj (6.2-70)
L’equazione dell’equilibrio delle tensioni di statore è inoltre ancora:
( ) aadssa EIXRV &&& ++= j (6.2-71)
Per quanto riguarda il rotore, al contrario, il fatto che esso ruoti alla velocità ωm comporta delle modifiche nell’equazione dell’equilibrio delle tensioni rispetto al caso di rotore fermo.
In primo luogo è necessario tener presente che la pulsazione delle grandezze indotte nel rotore è sω e che quindi la relativa frequenza è sf , con f = ω/2π frequenza delle grandezze di statore. Non è pertanto possibile fare riferimento ad un’unica rete equivalente in cui compaiono sia grandezze di statore che quelle di rotore, essendo le frequenze diverse.
È stato inoltre trovato che la rotazione del rotore influisce anche sul valore efficace delle f.e.m. indotte nelle fasi di rotore. Il valore efficace della f.e.m. indotta nella fasi di rotore allo scorrimento s è infatti pari a:
sEsE =)( (6.2-72)
essendo E (= kv Ea) il valore efficace della f.e.m. indotta a rotore fermo (s = 1). L’impedenza di una fase di rotore dipende dalla pulsazione elettrica delle grandezze indotte e quindi dallo
scorrimento:

174 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
drrdrrdrrr sXRLsRsXRsZ jj)(j)( +=ω+=+=& (6.2-73)
avendo considerato la resistenza di rotore costante al variare della frequenza. Con riferimento alla fase A, la corrente di rotore è quindi pari a:
drr
A
r
AA sXR
sEsZsEsI
j)(
)()()(
+−=−=&
&
&& (6.2-74)
in cui i fasori rappresentano grandezze sinusoidali di pulsazione sω.
La f.e.m. indotta )(sEA& e la reattanza di dispersione Xdr(s) = sXdr sono parametri che dipendono dalla velocità
del rotore, ossia dallo scorrimento s; per tale ragione sono rispettivamente denominati ‘tensione di scorrimento’ e ‘reattanza di scorrimento’.
Alle equazioni (5.2-71) e (6.2-74) corrispondono i due circuiti separati di Fig. 5.2-20. Poiché nel piano dei fasori le grandezze di pulsazione ω sono rappresentate da fasori fissi, la )(sEA
& , di
pulsazione sω = ω −pωm, ruota in tale piano con velocità − pωm (lo stesso vale per la )(sI A& ). Considerando 0=t
nell’istante in cui la )(sEA& è in fase con la f.e.m. indotta a rotore fermo AE& e tenendo conto della (6.2-72) si può
porre:
tpAA
mEssE ω−= je)( && (6.2-75)
in cui AE& rappresenta una funzione sinusoidale di pulsazione ω e )(sEA& ne rappresenta una di pulsazione sω.
Sostituendo la (6.2-75) nella (6.2-74) si ottiene:
drr
tpA
A sXREssI
m
je)(
j
+−=
ω−&& (6.2-76)
Dividendo numeratore e denominatore della (6.2-76) per s e dividendo entrambi i termini per e j− p tmω si ottiene:
drr
AA
tpA XsR
EIsI m
je)( j
+−
==ω&
&& (6.2-77)
Il fasore tpAA
msII ω= je)(&& rappresenta una grandezza sinusoidale di pulsazione ω (è fisso nel piano dei fasori
poiché )(sI A& ruota con velocità − pωm). Poiché AI& e AE& sono grandezze relative al funzionamento a rotore
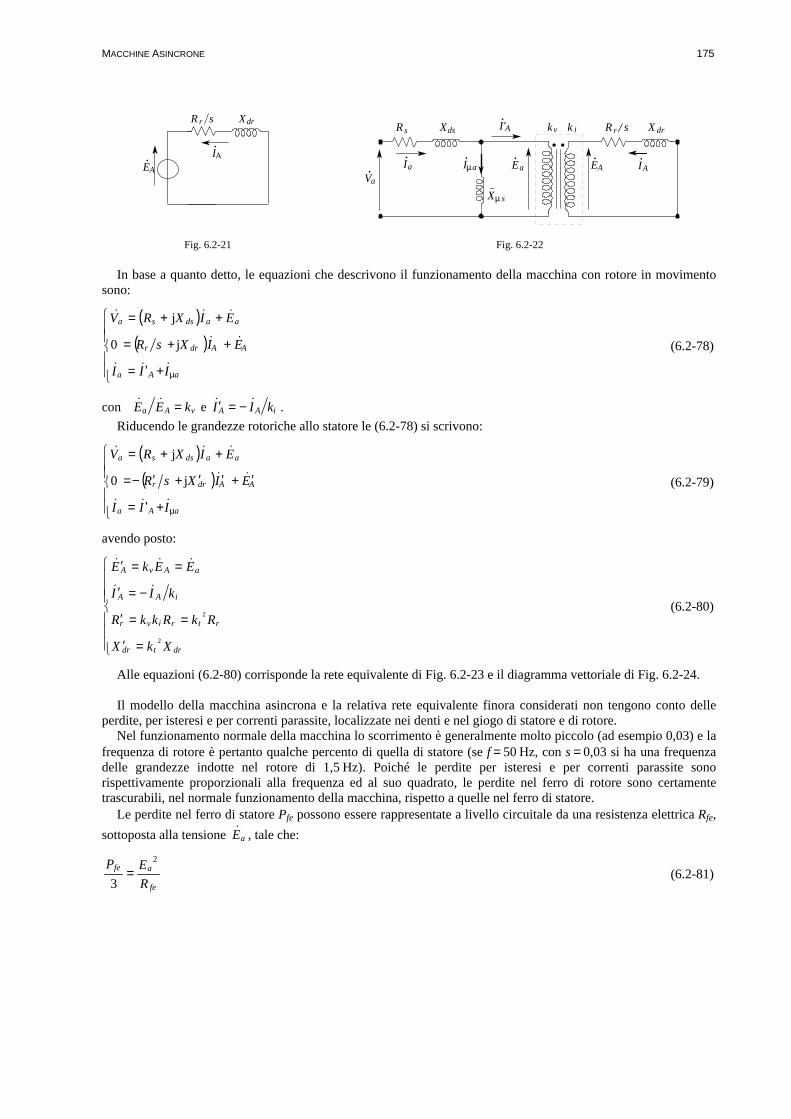
fermo, la relazione (6.2-77) può essere interpretata nel seguente modo: “la corrente che fluisce in una fase di rotore in movimento, ossia quando questo presenta lo scorrimento s, è uguale alla corrente che fluirebbe, a parità di tensione e di frequenza di alimentazione, nella stessa fase del rotore supposto fermo, dopo averne variata la resistenza da Rr a Rr/s”. Per tale motivo la corrente data dalla (6.2-77) si definisce anche ‘corrente di rotore riportata a rotore fermo’. In base a tale considerazione la rete equivalente della fase di rotore diventa quella di Fig. 6.2-21 in cui le grandezze rappresentate dai fasori hanno pulsazione ω.
Tale rete mette in evidenza che è possibile ricondurre lo studio della macchina asincrona in moto a quello di una macchina asincrona con rotore bloccato avente resistenza delle fasi rotoriche pari a Rr/s.
Poiché tutte le grandezze hanno pulsazione ω, è possibile scrivere delle relazioni in cui compaiono contemporaneamente grandezze di statore e grandezze di rotore e ricavare un’unica rete equivalente. Tale rete risulta essere uguale a quella trovata nel caso di rotore fermo, tranne che per il valore della resistenza di rotore (Fig. 6.2-22).
Rs Xds
Va! Ea
!
Ia!
A( )I
R
E! A
!
r drXs
s( )s
Fig. 6.2-20
MACCHINE ASINCRONE 175
I
R
EA!
A!
r drXs
Rs Xds kv
Va!
Ea!
EA!
Ia!
! !
X(
I!
R r drX
IA!
k iI'A!
s/
aµ
sµ
Fig. 6.2-21 Fig. 6.2-22
In base a quanto detto, le equazioni che descrivono il funzionamento della macchina con rotore in movimento sono:
( )( )
+=
++=
++=
µaAa
AAdrr
aadssa
III
EIXsR
EIXRV
&&&
&&
&&&
'
j0
j
(6.2-78)
con vAa kEE =&& e iAA kII && −=′ . Riducendo le grandezze rotoriche allo statore le (6.2-78) si scrivono:
( )( )
+=
′+′′+′−=
++=
µaAa
AAdrr
aadssa
III
EIXsR
EIXRV
&&&
&&
&&&
'
j0
j
(6.2-79)
avendo posto:
=′
==′
−=′
==′
drtdr
rtrivr
iAA
aAvA
XkX
RkRkkR
kII
EEkE
2
2
&&
&&&
(6.2-80)
Alle equazioni (6.2-80) corrisponde la rete equivalente di Fig. 6.2-23 e il diagramma vettoriale di Fig. 6.2-24. Il modello della macchina asincrona e la relativa rete equivalente finora considerati non tengono conto delle
perdite, per isteresi e per correnti parassite, localizzate nei denti e nel giogo di statore e di rotore. Nel funzionamento normale della macchina lo scorrimento è generalmente molto piccolo (ad esempio 0,03) e la
frequenza di rotore è pertanto qualche percento di quella di statore (se f = 50 Hz, con s = 0,03 si ha una frequenza delle grandezze indotte nel rotore di 1,5 Hz). Poiché le perdite per isteresi e per correnti parassite sono rispettivamente proporzionali alla frequenza ed al suo quadrato, le perdite nel ferro di rotore sono certamente trascurabili, nel normale funzionamento della macchina, rispetto a quelle nel ferro di statore.
Le perdite nel ferro di statore Pfe possono essere rappresentate a livello circuitale da una resistenza elettrica Rfe, sottoposta alla tensione aE& , tale che:
fe
afe
REP 2
3= (6.2-81)

176 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore avvolto
Rs Xds
Va!
Ea!
E'A!
Ia!
X(
I!
drX'I'A!
=
R'r s/
aµ
sµ
R
E a!
Φm!
E'A!
I'A!
I!
Ia!
Ia!
s
Ia!
XdsjVa!
I'A!R'rI'A
!
X'drj= s
aµ
Fig. 6.2-23 Fig. 6.2-24
La rete equivalente completa è quella di Fig. 6.2-25, alla quale corrispondono il diagramma dei fasori di Fig. 6.2-26 e le seguenti relazioni:
( )( )
+′=′+′′+′−=
++=
msrs
rrdrr
ssdsss
IIIEIXsR
EIXRV
&&&
&&
&&&
j0j
(6.2-82)
con
s
s
fe
ssfsms
XE
REIII
µµ +=+= (
&&&&&
j (6.2-83)
Si noti che sia nelle Fig. 6.2-25 e Fig. 6.2-26 che nelle relazioni (6.2-83) il pedice a è stato sostituito con s (statore) e il pedice A è stato sostituito con r (rotore) in quanto la rete equivalente è valida ovviamente per la generica fase della macchina.
La rete equivalente di Fig. 5.2-25 è utilizzata nel caso in cui è richiesto anche il calcolo delle perdite per valutare la prestazione della macchina da un punto di vista energetico (calcolo del rendimento). Per calcolare le altre grandezze (corrente assorbita, coppia, ecc.) è tuttavia possibile trascurare la resistenza Rfe senza introdurre errori rilevanti. Ciò è giustificato dai valori tipici dei parametri della rete equivalente, in particolare dal valore tipico della Rfe. I valori in p.u. dei parametri della rete equivalente, riferiti all'impedenza base (rapporto tra la tensione di fase nominale e la corrente di fase nominale), valgono:
06,001,0 ÷=′≅ rs RR ; 13,005,0 ÷=′≅ drds XX ; 51÷=µsX ;
sfe XR µ≅ 10
I valori più piccoli si riferiscono a macchine di qualche kW di potenza nominale ed i più grandi a macchine di alcune centinaia di kW. Il valore unitario per la reattanza di magnetizzazione si riferisce a macchine molto piccole.
È immediato verificare che la corrente assorbita dalla Rfe è soltanto qualche percento della corrente nominale. Inoltre tale corrente comporta delle variazioni sulle altre grandezze elettriche e sulla coppia del tutto trascurabili.
Se si considera ad esempio un motore asincrono di media potenza con i seguenti valori in p.u. dei parametri della rete equivalente:
03,0=′≅ rs RR , 09,0=′≅ drds XX , 4=µsX , 40=feR
e si trascura la resistenza Rfe, allo scorrimento nominale si commettono i seguenti errori percentuali:
2% =∆ sI , 07,0% =′∆ rI , 56,0%0 =∆I , 13,0% =∆C .
Rs Xds
Es!
E'r!Is
!
drX'I'r!
=
R'r s/
Rfe X s(
Ifs!
I!
Ims!
sµ
µ
Vs!
Fig. 6.2-25
R
E s!
Φm!
E'r!
I'r!
I!
Is!
Is!
s
Is!
XdsjVs!
I'r!R'r
I'r!
X'drj=
s
Ifs!
sµ
Ims!
Fig. 6.2-26

MACCHINE ASINCRONE 177
Osservazione. Le reti equivalenti con le quali si rappresenta la macchina asincrona presentano delle incertezze in quanto i parametri che vi figurano non sono a rigore costanti. Infatti, a parte la variazione della resistenza ohmica degli avvolgimenti per effetto della temperatura, i parametri possono variare con le condizioni di carico per effetto soprattutto della saturazione. Ad esempio la saturazione della corona statorica in prossimità dei denti influenza il flusso di dispersione e quindi le rispettive reattanze di dispersione. Inoltre il valore della reattanza magnetizzante Xµs dipende dalla saturazione del circuito magnetico principale, così come la perdita nel nucleo ferromagnetico non è una semplice funzione del flusso al traferro, poiché la densità di flusso varia da punto a punto nella struttura magnetica della macchina. È evidente che la causa principale della incertezza è dovuta alla saturazione. Nella progettazione di tali macchine, normalmente, le reattanze vengono calcolate in base all’ipotesi di permeabilità infinita e successivamente tale valore viene corretto attraverso un opportuno fattore che tenga conto dell’effetto della saturazione.
178 Modello statico e rete equivalente della Macchina Asincrona trifase con rotore a gabbia
6.3 MODELLO STATICO E RETE EQUIVALENTE DELLA MACCHINA ASINCRONA TRIFASE CON ROTORE A GABBIA
Il modello matematico e la relativa rete equivalente, determinati per la macchina asincrona con rotore avvolto, sono validi anche nel caso di rotore a gabbia se si riportano le grandezze della gabbia al numero di spire equivalenti di statore Nse in modo opportuno.
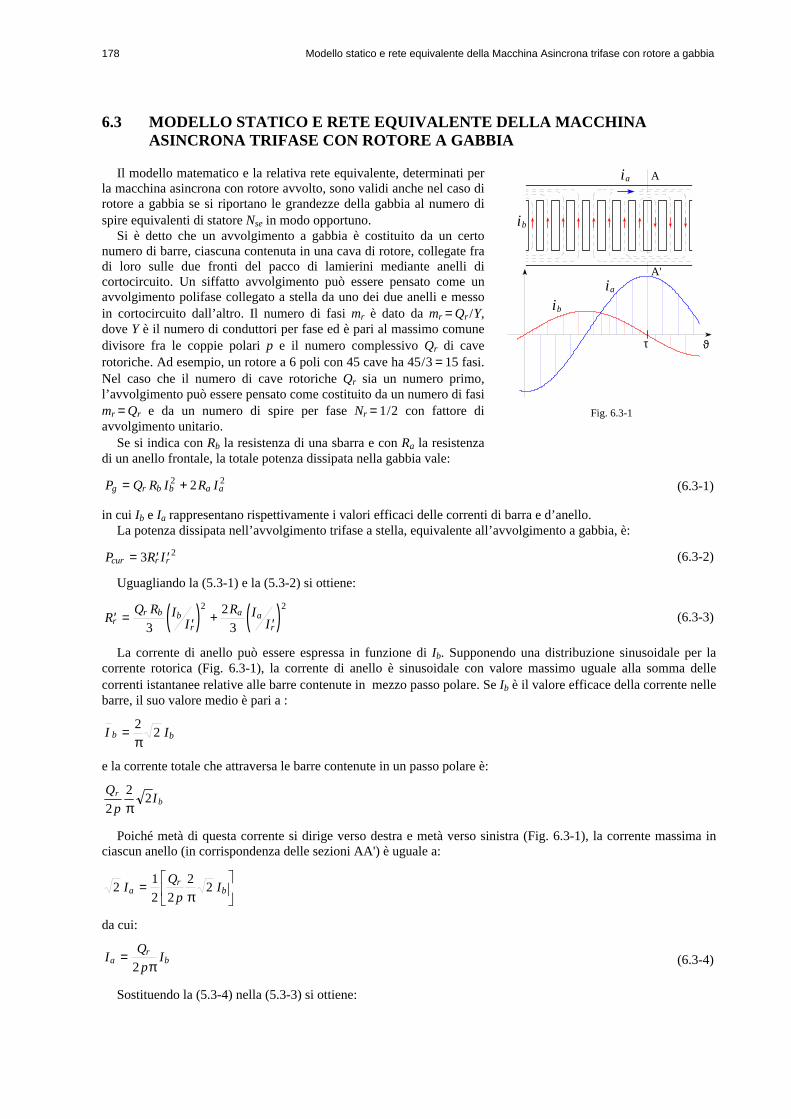
Si è detto che un avvolgimento a gabbia è costituito da un certo numero di barre, ciascuna contenuta in una cava di rotore, collegate fra di loro sulle due fronti del pacco di lamierini mediante anelli di cortocircuito. Un siffatto avvolgimento può essere pensato come un avvolgimento polifase collegato a stella da uno dei due anelli e messo in cortocircuito dall’altro. Il numero di fasi mr è dato da mr = Qr /Y, dove Y è il numero di conduttori per fase ed è pari al massimo comune divisore fra le coppie polari p e il numero complessivo Qr di cave rotoriche. Ad esempio, un rotore a 6 poli con 45 cave ha 45/3 = 15 fasi. Nel caso che il numero di cave rotoriche Qr sia un numero primo, l’avvolgimento può essere pensato come costituito da un numero di fasi mr = Qr e da un numero di spire per fase Nr = 1/2 con fattore di avvolgimento unitario.
Se si indica con Rb la resistenza di una sbarra e con Ra la resistenza di un anello frontale, la totale potenza dissipata nella gabbia vale:
P Q R I R Ig r b b a a= +2 22 (6.3-1)
in cui Ib e Ia rappresentano rispettivamente i valori efficaci delle correnti di barra e d’anello. La potenza dissipata nell’avvolgimento trifase a stella, equivalente all’avvolgimento a gabbia, è:
P R Icur r r= ′ ′3 2 (6.3-2)
Uguagliando la (5.3-1) e la (5.3-2) si ottiene:
( ) ( )′ = ′ + ′R Q R II
R IIr
r b br
a ar3
23
2 2 (6.3-3)
La corrente di anello può essere espressa in funzione di Ib. Supponendo una distribuzione sinusoidale per la corrente rotorica (Fig. 6.3-1), la corrente di anello è sinusoidale con valore massimo uguale alla somma delle correnti istantanee relative alle barre contenute in mezzo passo polare. Se Ib è il valore efficace della corrente nelle barre, il suo valore medio è pari a :
I Ib b= 2 2π
e la corrente totale che attraversa le barre contenute in un passo polare è:
br Ip
Q 222 π
Poiché metà di questa corrente si dirige verso destra e metà verso sinistra (Fig. 6.3-1), la corrente massima in ciascun anello (in corrispondenza delle sezioni AA') è uguale a:
2 12 2
2 2I Qp
Iar
b=
π
da cui:
I Qp
Iar
b=2 π
(6.3-4)
Sostituendo la (5.3-4) nella (5.3-3) si ottiene:
ϑτ
ib
ia
ib
ia A
A'
Fig. 6.3-1

MACCHINE ASINCRONE 179
′ = +
′
R Q R R Qp
IIr
rb
a r b
r32
3 2
2 2
π (6.3-5)
Poiché ( )2rb II ′ è pari a ki
2 , si ottiene:
′ = +
R Q R R Qp
krr
ba r
i32
3 2
22
π (6.3-6)
con
k m nm ni
s s
r r=
$
$ (6.3-7)
Nel caso di avvolgimento di statore reale con Ns spire in serie per fase, si ha:
$ ,n Np
K Nps
se as s= =42
42
1
π π
Analogamente, per il rotore si ha:
$ ,n Np
K Npr
re ar r= =42
42
1
π π
Per la gabbia, se Qr è un numero primo, $nr può essere calcolato considerando Kar,1 = 1 e Nr = 1/2:
$n Np prre= =4
24 1
212π π
(6.3-8)
Considerando inoltre ms = 3 e mr = Qr, per il rapporto delle correnti si ottiene:
k m nm n
K Np Q
p K NQi
s s
r r
as s
r
as s
r= = =
$
$, ,3 4
21
44 61 1
ππ (6.3-9)
Sostituendo infine k K NQ
ias s
r
2 12 2
236= , nella (5.3-6), si ottiene:
π+=
π
+=′ ar
br
sasrab
r
r
sasr R
pQR
QNK
pQRRQ
QNKR 22
221,
2
2
221,
212
232
336 (6.3-10)
Per quanto riguarda la riduzione allo statore della reattanza di dispersione è sufficiente osservare che la corrente I′r, percorrendo le ms = 3 fasi dell’avvolgimento equivalente, deve dissipare la stessa potenza reattiva dell’avvolgimento originale. Pertanto, considerando la sola reattanza di barra Xdb, si ottiene:
3 2 2′ ′ =X I Q X Idr r r db b
da cui:
′ =′
=X Q II
X K NQ
Xdrr b
rdb
as s
rdb3
122
12 2
, (6.3-11)
Avendo riportato le grandezze della gabbia all'avvolgimento trifase di statore, si può utilizzare il modello determinato per il rotore avvolto anche per la macchina asincrona con rotore a gabbia.

180 Bilancio energetico
6.4 BILANCIO ENERGETICO
Il bilancio energetico della macchina asincrona può essere definito a partire dalla rete equivalente riportata in Fig. 5.4-1. In tale rete, oltre alle induttanze relative al flusso disperso ed a quello mutuo, sono presenti altri tre bipoli (Rs, Rfe e R′r /s) che, essendo resistivi, sono relativi a tre potenze attive. È noto che Rs e Rfe tengono conto delle perdite per effetto Joule nell’avvolgimento di statore Pcus e le perdite nel ferro di statore Pfe. È interessante definire la potenza attiva relativa alla resistenza variabile R′r /s. A tale scopo si consideri la macchina asincrona funzionante da motore.
La macchina assorbe una potenza elettrica dalla rete di alimentazione:
P V Ie s s s= 3 cos( )γ (6.4-1)
avendo indicato con γs l’angolo di sfasamento tra tensione e corrente di statore. Per il principio di conservazione dell’energia, se alla potenza Pe si sottraggono le perdite per effetto Joule di
statore Pcus = 3RsI 2s e le perdite nel ferro di statore Pfe, la restante potenza deve coincidere con quella trasferita
dallo statore al rotore tramite la coppia elettromagnetica C. Tale potenza, detta potenza sincrona Psr, è quindi esprimibile come prodotto tra la coppia e la velocità angolare meccanica dei campi magnetici, ovvero la velocità sincrona ω/p:
Pp
Csr = ω (6.4-2)
L’unico bipolo resistivo presente nella rete equivalente che può “assorbire” tale potenza è R′r /s, quindi si ha:
P Rs
Isrr
r= ′ ′3 2 (6.4-3)
Dalle (5.4-2) e (5.4-3) si ottiene la seguente espressione della coppia elettromagnetica:
C p Rs
Irr= ′ ′3 2
ω (6.4-4)
che permette di calcolare la coppia in regime permanente a partire dalla corrente di rotore. Se si considera ora il bilancio energetico del rotore, parte della potenza da esso assorbita Psr viene dissipata per
effetto Joule negli avvolgimenti di rotore o nella gabbia:
P R Icur r r= ′ ′3 2 (6.4-5)
La restante parte è la potenza meccanica, esprimibile come prodotto tra la coppia elettromagnetica C e la velocità angolare meccanica del rotore ωm:
P P P Cm sr cur m= − = ω (6.4-6)
Sostituendo la (5.4-3) e la (5.4-5) nella (5.4-6) si ottiene:
P Rs
I R I R ss
Imr
r r r r r= ′ ′ − ′ ′ = ′ − ′3 3 3 12 2 2( ) (6.4-7)
dalla quale appare evidente che la potenza meccanica sviluppata per fase è pari alla potenza dissipata sulla resistenza R′r(1−s) /s e che quindi la resistenza R′r /s può essere scomposta nella resistenza R′r (perdite per effetto
Rs Xds
Vs! Es
!
E'r!I s
!
drX'I'r!
=
R'r s/
Rfe X(
Ifs!
I!
Ims!
sµ
sµ
−
Rs Xds
Vs! Es
!
E'r!Is
!
drX'I'r!
=
R'r
Rfe X(
Ifs!
I!
Ims!
sµ
!
ss1
!
A
B
R'r
sµ
Fig. 6.4-1 Fig. 6.4-2
MACCHINE ASINCRONE 181
Joule) e nella resistenza R′r(s) = R′r(1−s) /s (potenza meccanica). La rete di Fig. 6.4-1 può essere pertanto modificata in quella di Fig. 6.4-2.
È necessario infine considerare la coppia dovuta agli attriti meccanici ed alla ventilazione Ca,v, negativa rispetto alla velocità angolare del rotore, che determina le perdite per attrito e ventilazione:
P Ca v m a v, ,= ω (6.4-8)
La coppia utile è pertanto data, nel funzionamento da motore, dalla differenza tra la coppia elettromagnetica e la coppia di attrito e ventilazione; 7 la potenza meccanica utile è pari a:
P C Cu m a v= −ω ( ), (6.4-9)
Poiché la rete equivalente non tiene conto della peraltro modesta potenza perduta per attrito e ventilazione, tale potenza viene spesso trascurata o la relativa coppia viene inglobata nella coppia resistente.
In alternativa è possibile tener conto delle perdite per attrito e ventilazione nella rete equivalente introducendo il concetto di perdite rotazionali, definite come:
P P Prot fe a v= + , (6.4-10)
In tal caso, la resistenza Rfe va sostituita con la resistenza R0 (di valore ovviamente minore) che tiene conto delle totali perdite rotazionali e non solo delle perdite nel ferro.
In entrambi i casi, si può continuare in tal modo a far riferimento alla coppia elettromagnetica ed alla potenza meccanica Pm come coppia e potenza utile.
È utile sottolineare che sia la potenza Pcur che la potenza Pm possono essere espresse in funzione dello scorrimento e della potenza sincrona. È immediato infatti verificare le seguenti espressioni:
srcur sPP = (6.4-11)
P s Pm sr= −( )1 (6.4-12)
dalle quali risulta evidente che la quantità (1−s) esprime di fatto il rendimento rotorico. La rete equivalente di Fig. 6.4-2 può essere paragonata a quella di un trasformatore con il secondario chiuso su
un carico variabile puramente ohmico R′r(s). Essa consente inoltre di comprendere in modo qualitativo il funzionamento della macchina asincrona. Infatti se la macchina è a rotore fermo (cioè ωm = 0 e quindi s = 1) si ha che R′r(s) = 0. In tale situazione la rete equivalente presenta un cortocircuito tra i morsetti A e B. Per tale ragione la condizione (e la prova) di corto circuito con rotore bloccato viene spesso chiamata di ‘corto circuito’.
Se la macchina funziona in assenza di coppia resistente, se è quindi presente solo la coppia dovuta agli attriti e alla ventilazione, la velocità del rotore è molto vicina a quella di sincronismo per cui lo scorrimento ha un valore prossimo a zero. Ciò significa che R′r(s) = ∞, ossia tanto la macchina che la rete ad essa equivalente sono ‘a vuoto’.
Se, a partire dalla condizione di vuoto, è applicata all’albero una coppia resistente Cr il rotore tende a rallentare. La riduzione della velocità del rotore causa un aumento dello scorrimento s e la conseguente riduzione della resistenza R′r(s). Ciò determina un aumento della corrente I ′r fino ad un valore tale per cui la coppia elettromagnetica è sufficiente ad equilibrare la coppia resistente. Una volta raggiunto l’equilibrio la macchina funziona a regime con un preciso valore dello scorrimento s. Infatti ad ogni condizione di carico corrisponde un unico valore dello scorrimento.
Quanto detto può essere verificato considerando che, dato il valore dello scorrimento, possono essere univocamente determinate le seguenti quantità:
- potenza elettrica assorbita: )cos(3 ssse IVP γ=
- perdite nell’avvolgimento statorico: 23 sscus IRP =
- perdite nel ferro: fe
sfe R
EP2
3=
- potenza sincrona: PRs Isrr
r=′
′3 2
7 Quando la coppia elettromagnetica è concorde con la velocità del rotore la coppia di attrito e ventilazione si sottrae, nel caso contrario, ad
esempio in fase di frenatura, si somma.

182 Bilancio energetico
- perdite nell’avvolgimento rotorico: P R Icur r r= ′ ′3 2
- potenza meccanica: 2)1(3 rrm Is
sRP ′−′=
Inoltre, note le perdite per attrito e ventilazione, può essere calcolata la potenza utile:
P P Pu m a v= − ,
ed il rendimento:
e
p
e
pe
e
u
PP
PPP
PP ∑∑ −=
−==η 1
avendo indicato con ∑ pP la somma di tutte le perdite. Il bilancio energetico della macchina asincrona funzionante da motore è schematizzato in Fig. 6.4-3.
Pe PmP
Pcus Pfe Pa,vPcur
Statore Rotore
sr!
!
!
Pu
Fig. 6.4-3

MACCHINE ASINCRONE 183
6.5 CARATTERISTICA MECCANICA
La caratteristica meccanica rappresenta la funzione coppia-velocità angolare meccanica del rotore. Nel caso della macchina asincrona con caratteristica meccanica si intende anche la funzione coppia-scorrimento.
Il calcolo della coppia elettromagnetica della macchina asincrona può essere sviluppato a partire dall’espressione:
23 rr I
sRpC ′′
ω= (6.5-1)
andando a calcolare la corrente & ′Ir tramite la rete equivalente di Fig. 6.5-1, in cui vengono trascurate le perdite nel ferro e la reattanza di magnetizzazione è considerata costante (si trascura la saturazione magnetica).
Per ottenere un’espressione semplice della corrente di rotore si applichi il teorema di Thevenin (Fig. 6.5-2) a sinistra dei punti A e B del circuito di Fig. 6.5-1:
)(jj
0sdss
ssAB XXR
XVV
µ
µ
++= &&
[ ]22
2
22
2
)()(j
)()(j)j(jj
sdss
sdsdsss
sdss
ss
sdss
dssseqeqeq
XXRXXXRX
XXRXR
XXRXRXXRZ
µ
µµ
µ
µ
µ
µ
++++
+++
=++
+=+=&
Essendo )(<< sdss XXR µ+ , si ottiene:
sssds
ssAB Vk
XXXVV &&& =+
≅µ
µ0 (6.5-2)
[ ] [ ]2
22
2
2
2
2
)()(j
)()(j
)( sds
sdsdsssss
sds
sdsdsss
sds
sseq
XXXXXRXRk
XXXXXRX
XXXRZ
µ
µµ
µ
µµ
µ
µ
+++
+=+
+++
+≅& (6.5-3)
con:
sds
ss XX
Xkµ
µ
+= (6.5-4)
Essendo )(<<2sdsdss XXXR µ+ , si ottiene:
dsssssds
sdssseq XkRk
XXX
XRkZ j)(
j 22 +=+
+≅µ
µ& (6.5-5)
Per il calcolo della corrente di rotore si può quindi utilizzare la rete equivalente di Fig. 6.5-3, dalla quale si ottiene:
drss
ssr
XsRRkVkI
j)( 2 +′+=′
&& (6.5-6)
R eq Xeq
V!
drX'
I'r!
R'rA
B
/s
AB0
!
!
Rs Xds drX'
I'r!
R'r /s
ksV!
s
ks ks2
Fig. 6.5-2: Modifica della rete equivalente secondo il teorema
di Thevenin. Fig. 6.5-3: Rete equivalente semplificata
Rs Xds
Vs!
Es!
E'r!
Is!
drX'
I'r!
=
R'r
X
I!
sµ
!
!
A
B
/s
sµ
!
!
!
!
Fig. 6.5-1

184 Caratteristica meccanica
222
22
)/()(
drss
ssr
XsRRkVkI
+′+=′ (6.5-7)
con:
drdssd XXkX ′+= (6.5-8)
Sostituendo la (5.5-7) nella (5.5-1), per la coppia elettromagnetica si ha:
( ) 222
2
/
)(3)(drss
ssr
XsRRk
Vks
RpsC+′+
′ω
= (6.5-9)
Si vuole ora studiare, per una fissata tensione di alimentazione, la funzione C(s). In primo luogo si ha:
)/( 0per )/( 0per )/( 0per
0)(0)(0)(
pspsps
sCsCsC
m
m
m
ω>ω<ω=ω=ω<ω>
<=>
(6.5-10)
Ovvero: – se la velocità del rotore è minore della velocità sincrona (velocità meccanica del campo), la macchina produce
una coppia concorde con la velocità meccanica sincrona; – se la velocità del rotore è uguale a quella sincrona, la macchina non produce coppia; – se la velocità del rotore è maggiore della velocità sincrona, la macchina genera una coppia negativa rispetto alla
velocità meccanica sincrona. Annullando la derivata della coppia rispetto allo scorrimento si ottengono inoltre i due valori di scorrimento per
i quali si ha la coppia massima e la coppia minima:
zR
XRk
Rs r
dss
rM
′=
+
′=
222 )(; M
r
dss
rm s
zR
XRk
Rs −=′
−=+
′−=
222 )( (6.5-11)
con 222 )( dss XRkz += .
Sostituendo sM e sm nella funzione della coppia si trovano i seguenti valori per la coppia massima e la coppia minima:
++ω
=+ω
=++ω
=ssdss
ss
ss
ss
dss
ssM
RkXRk
VkpRkz
VkpXzRk
VkzpC2222
2
2
2
222
2
)(2
)(3)(2
)(3)(
)(3 (6.5-12)
−+ω
−=−ω
−=+−ω
−=ssdss
ss
ss
ss
dss
ssm
RkXRk
VkpRkz
VkpXzRk
VkzpC2222
2
2
2
222
2
)(2
)(3)(2
)(3)(
)(3 (6.5-13)
Si osserva che la resistenza rotorica influenza gli scorrimenti sM e sm ma non i valori di coppia massima e minima e che questi ultimi non sono uguali, in valore assoluto, a causa della resistenza statorica.
L’andamento qualitativo della funzione C(s) può essere determinato nel seguente modo. Quando il valore assoluto di s è molto piccolo, ks
2Rs può essere trascurato rispetto a R′r /s ed il termine Xd2 può essere trascurato
rispetto a (R′r /s)2; dall'espressione della coppia si ottiene pertanto:
sRVkpsC
r
ss
′ω≅
2)(3)( (6.5-14)
la quale mostra che, in prossimità di s = 0, la coppia è funzione lineare dello scorrimento ed è quindi rappresentabile con una retta (Fig. 5.5-4).
Quando il valore assoluto di s è grande, si può ritenere R′r /s trascurabile rispetto a ks2Rs e pertanto dalla (5.5-9) si
ricava:

MACCHINE ASINCRONE 185
sR
XRkVkpsC r
dss
sx ′+ω
≅ 222
2
)()(3)( (6.5-15)
che mostra come la curva della coppia, per s grande, possa essere rappresentata da un’iperbole (Fig. 5.5-4). Ponendo s = 1 nella (5.5-9) si ottiene inoltre il valore della coppia all'avviamento (ωm = 0), detta anche coppia
di spunto:
( ) 222
2
avv)(3
drss
ssr
XRRk
VkRpC+′+
′ω
= (6.5-16)
Essendo nella pratica ( ) 222drss XRRk <<′+ , si può scrivere:
22
2
avv)(3 sr
d
ssr VRK
XVkRpC ′=′
ω≅ (6.5-17)
Si noti che la coppia di avviamento risulta proporzionale alla resistenza del rotore ed al quadrato della tensione di alimentazione. Ciò spiega perché in caso di abbassamenti della tensione i motori ad induzione non si avviano o stentano ad avviarsi, con il pericolo di bruciare l’avvolgimento se non viene aperto l'interruttore di macchina (l'elevata corrente di spunto continua a circolare negli avvolgimenti).
L'espressione della coppia in funzione dello scorrimento può essere scritta in modo più compatto. Si consideri il rapporto tra la funzione C(s) e il suo valore massimo:
( ) 222
22)(
drss
ssr
M XsRRk
RkzsR
CsC
+′+
+′= (6.5-18)
Sostituendo zsR Mr =′ e ponendo:
zRk ss
2
=χ (6.5-19)
si ottiene:
χ+++χ=
2)1(2)(ssssC
sC
MMM (6.5-20)
ovvero:
χ+++χ=
2)1(2)(
ssssCsC
MM
M (6.5-21)
Se si trascura inoltre ss Rk 2 rispetto a dX ( 0=χ ) si ottiene un'espressione approssimata molto compatta per la coppia:
0.5 1 s
C
sM
CM
Cm
Cavv
sm
Fig. 6.5-4: Coppia in funzione dello scorrimento.
186 Caratteristica meccanica
ssssCsC
MM
M
+≅ 2)( (6.5-22)
Essendo la (6.5-22) una funzione dispari, si trova che il valore assoluto della coppia minima è uguale al valore massimo; si sarebbe pervenuti allo stesso risultato trascurando ss Rk 2 nelle (5.5-9), (5.5-11), (5.5-12) e (5.5-13):
( ) 22
2
/)(3)(
dr
ssr
XsRVk
sRpsC
+′′
ω= (6.5-23)
d
rmM
XRss
′=−= (6.5-24)
d
ssmM X
VkpCC2
)(32
ω=−= (6.5-25)
Dalla (6.5-22) è inoltre immediato scrivere l'equazione della retta con la quale approssimare la coppia per piccoli valori dello scorrimento ( ssss MM << ):
ssCsC
M
M2)( ≅ (6.5-26)
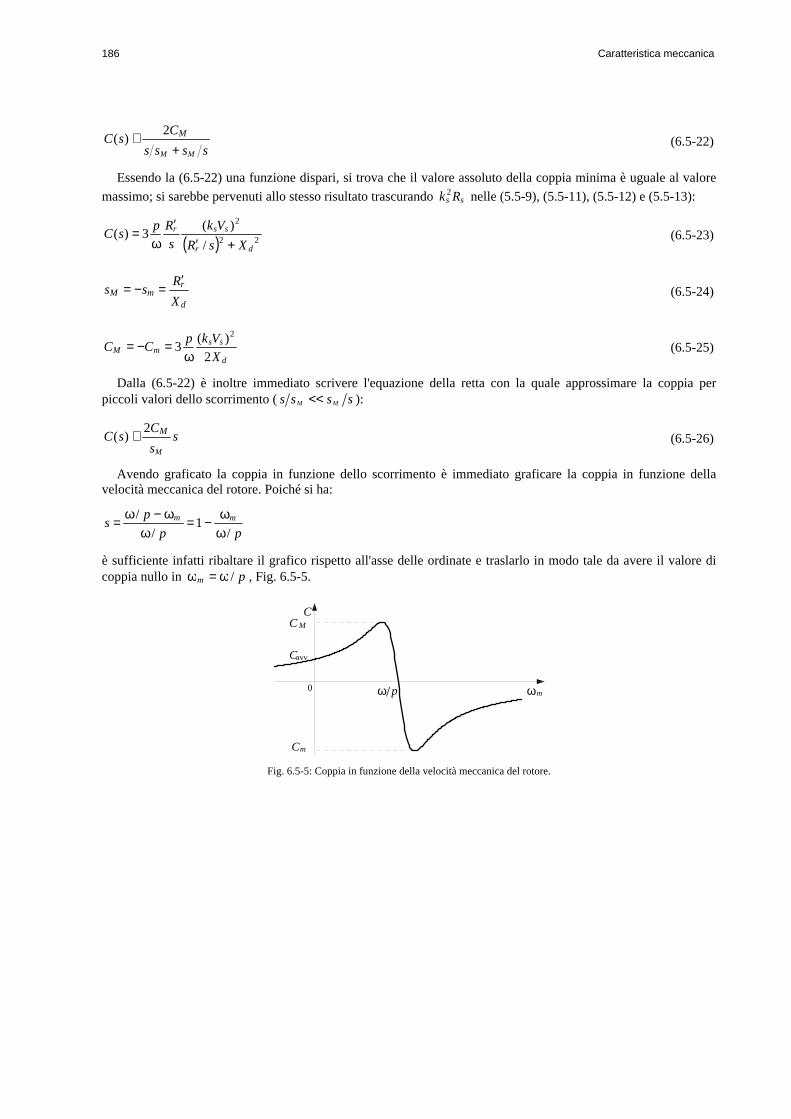
Avendo graficato la coppia in funzione dello scorrimento è immediato graficare la coppia in funzione della velocità meccanica del rotore. Poiché si ha:
ppps mm
/1
//
ωω−=
ωω−ω=
è sufficiente infatti ribaltare il grafico rispetto all'asse delle ordinate e traslarlo in modo tale da avere il valore di coppia nullo in pm /ω=ω , Fig. 6.5-5.
ω
CC M
Cm
Cavv
0 mω/p
Fig. 6.5-5: Coppia in funzione della velocità meccanica del rotore.

MACCHINE ASINCRONE 187
6.6 TIPI DI FUNZIONAMENTO DELLA MACCHINA ASINCRONA
Le macchine asincrone, benché siano generalmente impiegate come motori, possono funzionare anche come generatori e freni.
Prima di analizzare singolarmente i suddetti tipi di funzionamento è opportuno richiamarne le definizioni. A tal fine in Fig. 6.6-1 sono illustrati, in ciascuno dei tre casi, i versi dei flussi di potenza che la macchina scambia con la rete, tramite i morsetti dell’avvolgimento statorico (potenza attiva), e con un utilizzatore o con un motore primo, tramite l’accoppiamento meccanico dell’albero.
Il primo caso (Fig. 6.6-1.a) è relativo al funzionamento da motore: in esso la macchina asincrona assorbe potenza elettrica Pe dalla rete di alimentazione e la converte (a meno delle perdite) in potenza meccanica Pm, fornita all’utilizzatore per mezzo dell’albero.
Il secondo caso (Fig. 6.6-1.b) si riferisce al funzionamento da generatore ed è caratterizzato da flussi di potenza invertiti rispetto al caso precedente. Infatti in questo tipo di funzionamento la macchina assorbe potenza meccanica dal motore primo e la converte (a meno delle perdite) in potenza elettrica attiva che viene erogata alla rete.
L’ultimo caso infine (Fig. 6.6-1.c) si riferisce al funzionamento da freno, nel quale la macchina riceve potenza sia dalla rete che dall’utilizzatore e la dissipa in perdite interne alla macchina stessa.
Con le convezioni finora utilizzate per le potenze, potenza elettrica positiva quando assorbita dalla macchina e potenza meccanica positiva quando erogata dalla macchina, i tre tipi di funzionamento sono caratterizzati dalle seguenti condizioni:
0 0 >> me PP Funzionamento da motore
0 0 << me PP Funzionamento da generatore
0 0 <> me PP Funzionamento da freno
(6.6-1)
Si vogliono ora individuare gli intervalli di velocità, ovvero di scorrimento, per i quali si realizzano i suddetti tipi di funzionamento per la macchina asincrona. A tal fine, in accordo con la (5.6-1), è sufficiente studiare il segno delle funzioni Pm(s) e di Pe(s).
La potenza meccanica è pari a:
2)1(3 rrm Is
sRP ′−′= (6.6-2)
ed il suo segno coincide pertanto con quello del fattore (1−s) /s. È immediato ricavare gli intervalli di positività e negatività della potenza meccanica:
)0( 10per 0 psP mm ω<ω<<<>
) e 0( 1 e 0per 0 pssP mmm ω>ω<ω><<
riportati in Fig. 6.6-2.
ω
s
0
0 1
m ω/p
−R'r s' s"
PePm
− −−−− −
+ ++ + +
+
C
F F G F M F
Rsks2( )
PePp Pm
Pe Pp Pm
Pe Pp Pm
> 0> 0> 0
< 0 > 0
> 0
< 0
< 0> 0
Motore
Generatore
Freno
U
MP
U
!
!!
!
!!
!
!!
a
b
c Fig. 6.6-1

188 Tipi di funzionamento della macchina asincrona
Fig. 6.6-2
Trascurando le perdite nel ferro e facendo riferimento al circuito di Thevenin di Fig. 6.5-3, la potenza elettrica assorbita dalla macchina è pari a:
( ) 223 rrsse IsRRkP ′′+=
Lo studio del segno di Pe si riconduce quindi a quello del segno del binomio (ks2Rs+R′r /s). Si dimostra
facilmente che Pe è positiva per s > 0 e per s < −R′r /(ks2Rs) ≅ − 1, come indicato in Fig. 6.6-2. In realtà l’intervallo di
negatività è leggermente meno ampio di quello trovato a causa delle perdite nel ferro. In Fig. 6.6-2 l’intervallo di negatività effettivo è indicato con s′< s < s″.
Confrontando gli intervalli di positività e negatività ricavati per Pe e Pm si deducono, tenuto conto delle (5.6-1), i seguenti intervalli di funzionamento:
motore per 10 << s
generatore per )0()1)(( 2 <′′<<′<−≅′− sssRkR ssr
freno per 1>s , ))(1( 2ssr RkRss ′−≅−>′<
(6.6-3)
Per quanto riguarda il funzionamento da freno è opportuno puntualizzare meglio alcuni aspetti particolari. Affinché la frenatura sia efficace è necessario che le perdite nella macchina siano alimentate prevalentemente dalla potenza meccanica e solo in minima parte dalla potenza elettrica. Al contrario la macchina dissiperebbe molta potenza elettrica senza sviluppare una elevata azione frenante, quantificata dalla potenza meccanica assorbita. Per valutare l’azione frenante è necessario analizzare come varia in funzione dello scorrimento la funzione β(s), definita come rapporto tra la potenza meccanica assorbita e le perdite totali, pari alla somma della potenza meccanica assorbita e della potenza elettrica assorbita. Poiché nel funzionamento da freno la potenza meccanica è negativa tale rapporto è pari a:
ss
I)sRRk(IR
s)s(
IRs)s(
PP)s(β
rr
ssrr
rr
p
m
21−=
′′+3+′′1−3
′′1−3=−=
222
2
(6.6-4)
in cui si è supposto ssr RkR 2≅′ . Ovviamente quanto più elevato è β(s) e tanto più efficace è la frenatura. Dall’andamento di β(s) di Fig. 6.6-3
risulta quindi evidente che la macchina si comporta effettivamente da freno per scorrimenti minori di -1, o meglio per )( 2
ssr RkRs ′−< . Per scorrimenti maggiori di 1, al contrario, la potenza meccanica assorbita è modesta mentre è elevata quella elettrica, pari a (1-β(s)) in p.u. rispetto alle perdite.
In effetti per s = −1 la potenza elettrica non è effettivamente nulla, come risulta dalla Fig. 6.6-3. Per tale valore
di scorrimento infatti la macchina assorbe la potenza dissipata del ferro che in questa analisi è stata trascurata. L’analisi effettuata rimane tuttavia valida per quanto riguarda le conclusioni generali fatte sull’efficacia del funzionamento da freno.
Gli intervalli di funzionamento della macchina asincrona sono indicati in Fig. 6.6-2, in cui, per completezza,
-4 -3 -2 -1 0 1 2 3 4-0.5
0
0.5
1
1.5
s
β
Fig. 6.6-3
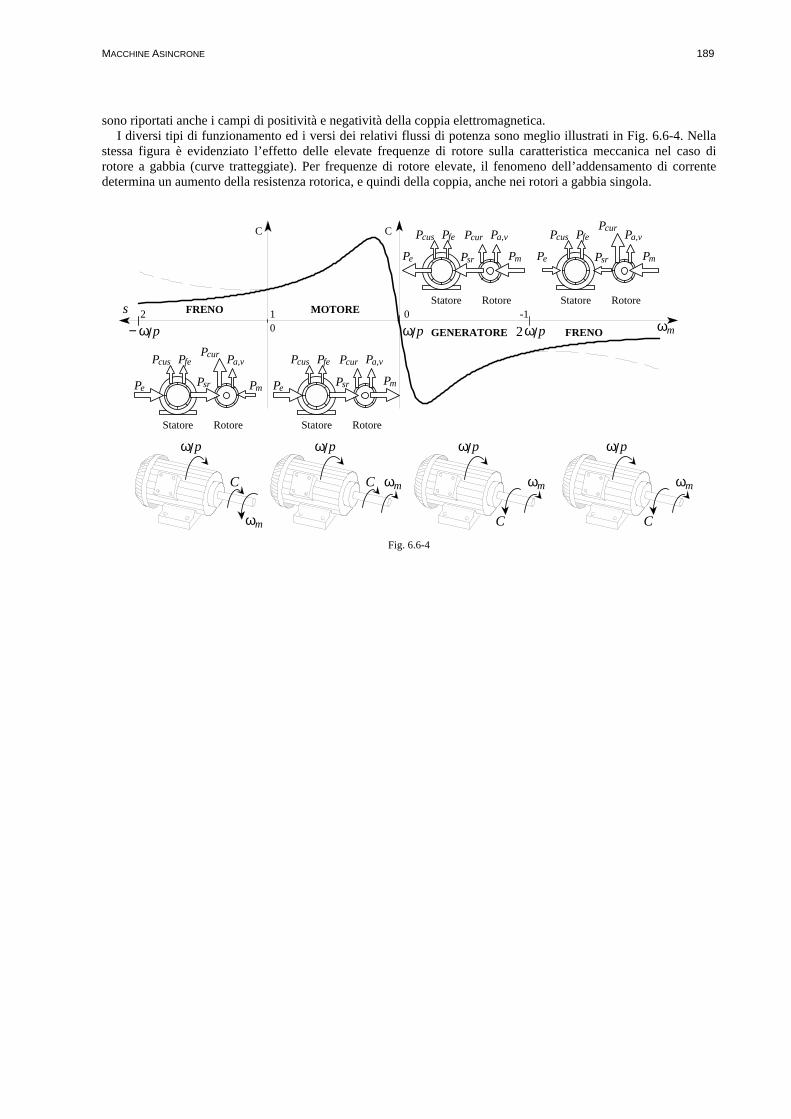
MACCHINE ASINCRONE 189
sono riportati anche i campi di positività e negatività della coppia elettromagnetica. I diversi tipi di funzionamento ed i versi dei relativi flussi di potenza sono meglio illustrati in Fig. 6.6-4. Nella
stessa figura è evidenziato l’effetto delle elevate frequenze di rotore sulla caratteristica meccanica nel caso di rotore a gabbia (curve tratteggiate). Per frequenze di rotore elevate, il fenomeno dell’addensamento di corrente determina un aumento della resistenza rotorica, e quindi della coppia, anche nei rotori a gabbia singola.
0
C
2
FRENO MOTORE
GENERATORE
Statore Rotore
Pe PmPsr
Pcus Pfe Pa,vPcur
Pe PmP
Pcus Pfe Pa,vPcur
Pe PmP
Pcus Pfe Pa,vPcur
Statore Rotore
Statore Rotore
C C
C
sr
sr
s 012
C
-1
C
Pe PmP
Pcus Pfe Pa,vPcur
Statore Rotore
sr
FRENO ωm
ω/p
ωmωmωm
ωm
ω/pω/pω/p
ω/p ω/pω/p−
Fig. 6.6-4

190 Motori Asincroni
6.7 MOTORI ASINCRONI
Si consideri una macchina asincrona trifase con il rotore fermo e si colleghino le fasi di statore alla linea di alimentazione. L’interazione tra il campo magnetico di statore e quello di rotore determina una coppia il cui valore, essendo il rotore fermo, è pari alla coppia di avviamento Cavv. Se tale valore è maggiore della coppia resistente applicata all’albero il rotore si mette in rotazione nello stesso verso dei due campi magnetici, con una accelerazione proporzionale alla differenza tra coppia motrice e resistente. La velocità del sistema continua ad aumentare fino ad un valore per il quale la coppia motrice e quella resistente sono uguali (le due coppie sono ovviamente discordi). Se si riportano nello stesso piano le caratteristiche meccaniche della macchina asincrona e del carico, il punto di equilibrio (velocità costante) corrisponde alla loro intersezione 8. Supponendo di aver scelto la macchina ideale per il carico assegnato, al punto di equilibrio corrispondono i valori nominali di coppia e di scorrimento Cn e sn (Fig. 6.7-1). Lo scorrimento nominale sn varia normalmente tra 0,01 e 0,05 ed è tale per cui il rapporto Cm /Cn, ossia il rapporto tra la coppia massima e quella nominale, sia compreso tra 1,5 e 2,5. Tale rapporto esprime la capacità di sovraccarico della motore ed indica di quanto può aumentare la coppia resistente senza che il motore si fermi.
Soddisfatte determinate condizioni, la macchina si porta quindi automaticamente a funzionare da motore nel tratto della caratteristica compresa fra gli scorrimenti s = 0 e s = sn.
Dal grafico di Fig. 6.7-1 è possibile anche stabilire se il funzionamento del sistema è stabile o meno. A tal fine si riconosce facilmente che il funzionamento è stabile se, in corrispondenza dell’intersezione tra le curve C(s) e Cr(s), risulta:
sC
sC r
dd
dd > (6.7-1)
ove il primo e il secondo membro rappresentano rispettivamente le derivate rispetto allo scorrimento della coppia del motore asincrono e della coppia resistente.
Dalla (6.7-1) si deduce infatti che ad un incremento ds positivo dello scorrimento (corrispondente ad una diminuzione della velocità imputabile ad una perturbazione accidentale qualsiasi) fa riscontro l’insorgere di una eccedenza d(C− Cr) della coppia motrice su quella resistente cosicché, al termine della perturbazione, il motore tende ad aumentare la propria velocità ripristinando la situazione di equilibrio iniziale. Analogamente un ds negativo determina un’eccedenza della coppia resistente su quella motrice cosicché nasce un’azione di rallentamento che tende a ripristinare lo stato iniziale.
In accordo a questo criterio e non considerando improbabili caratteristiche di carico, con riferimento alla Fig. 6.7-2, i punti 1 e 2 sono stabili, i punti 4 e 5 sono instabili ed il punto 3 è critico.
Si deve inoltre osservare che per scorrimenti compresi tra s = 0 e s = sM la caratteristica meccanica C(s) è in genere molto ripida cosicché ad elevate variazioni della coppia resistente corrispondono modeste variazioni di velocità del motore. Questo comportamento è simile a quello del motore a corrente continua eccitato in derivazione ed alimentato a tensione costante.
0 0.5 1
CCM
s
Cavv
sn sM
CnCr
0ωm 0 0.5 1
C
s
!
!
!
!
!1
2
3
4
5
Fig. 6.7-1 Fig. 6.7-2
8 In effetti il transitorio è leggermente più complesso in quanto il punto di equilibrio viene raggiunto dopo alcune oscillazioni smorzate di
velocità e di coppia.

MACCHINE ASINCRONE 191
6.7.1 CARATTERISTICHE DI FUNZIONAMENTO A REGIME DEL MOTORE ASINCRONO
È stato visto che la macchina asincrona funziona da motore per scorrimenti compresi tra 0 ed 1. Nel funzionamento a regime però (escludendo quindi i transitori) il valore di scorrimento è compreso tra s0 ed sn, avendo indicato con s0 il piccolo valore di scorrimento che si ha nel funzionamento a vuoto e con sn il valore di scorrimento nominale. A vuoto lo scorrimento è molto piccolo perché la potenza utile è nulla e la corrente di rotore è molto piccola, dovendo sviluppare una coppia pari a quella dovuta all’attrito ed alla ventilazione. In tali condizioni il fattore di potenza è piuttosto piccolo perché la corrente assorbita dalla macchina è costituita principalmente dalla corrente magnetizzante. La corrente in fase con la tensione è quella relativa alle sole perdite rotazionali. Per piccoli motori il fattore di potenza a vuoto può arrivare a 0,25. All’aumentare della potenza nominale del motore il fattore di potenza a vuoto tende a diminuire e può arrivare a 0,1. Anche il valore della corrente a vuoto dipende dalla potenza nominale della macchina. Il valore p.u. della corrente a vuoto decresce all’aumentare della potenza nominale (0,25÷0,3 per grandi motori, 0,5 o più elevato per piccoli motori). Nel funzionamento a vuoto si ha inoltre una coppia utile nulla e quindi il rendimento è pari a 0.
All’aumentare della potenza meccanica erogata dalla macchina lo scorrimento di funzionamento e la corrente assorbita aumentano fino ai valori sn, e In ( 1=I
)), corrispondenti alla potenza nominale ( 1=mP
)). Lo scorrimento
nominale dipende dal tipo di macchina e dalla potenza nominale ed assume valori compresi tra 0,004 (motori di potenza superiore a 1 MW) e 0,03÷0,04 (motori da qualche kW). A pieno carico il fattore di potenza assume valori compresi tra 0,8 e 0,9 mentre il rendimento può variare in un intervallo piuttosto ampio a seconda del tipo di macchina e della potenza nominale. Si possono avere rendimenti a pieno carico compresi tra 0,7 (piccoli motori) e 0.98 (grandi motori).
In Fig. 6.7-3 sono mostrati gli andamenti del rendimento, del fattore di potenza e dei valori in p.u. della corrente e della coppia in funzione della potenza erogata in p.u. di un motore asincrono. Il rendimento assume il valore massimo per un valore di potenza erogata non molto più piccolo della potenza nominale, per il quale, come nei trasformatori, le perdite negli avvolgimenti sono circa uguali a quelle rotazionali.
È bene infine tener presente che a parità di potenza nominale la macchina asincrona che ha la massima velocità sincrona (p = 1) è vantaggiosa sotto molti punti di vista rispetto a quelle più lente. A titolo di esempio, nella Tab. 6.2 sono riportati i valori orientativi di alcuni dati signicativi di due motori di uguale potenza nominale e diverso numero di coppie polari. Il confronto risulta favorevole al motore più veloce sia da un punto di vista tecnico che da un punto di vista economico. Dal peso delle due macchine si può infatti dedurre che quella lenta costerà sicuramente più del doppio della veloce.
Potenza nominale kW 7,5 7,5 Coppie polari 1 4 Fattore di potenza a pieno carico 0,89 0,82 Rendimento a pieno carico 0,87 0.83 Coppia all’avviamento p.u. 1,5 1,3 Peso kg 50 110
Tab. 6.2
0
0.25
0.5
0.75
1
0 0.2 0.4 0.6 0.8 1
η
cos( )φ
C
I
Pm
)
)
)
Fig. 6.7-3

192 Motori Asincroni
6.7.2 L’AVVIAMENTO DEI MOTORI ASINCRONI
L’avviamento dei motori asincroni presenta un problema di tipo elettrico ed uno di tipo meccanico che non sono tuttavia indipendenti.
Il problema elettrico consiste nell’elevata corrente di spunto assorbita dalla macchina, che può valere anche 8 volte la corrente nominale. Il va-lore della corrente di avviamento è calcolato in prima approssimazione in modo molto semplice, trascurando la corrente magnetizzante (Fig. 6.7-4)9
)(j)(,
drdsrs
nsavv XXRR
VI
′++′+≅
&& ;
22
,
)()( drdsrs
nsavv
XXRR
VI
′++′+≅
L’espressione della corrente di avviamento è giustificata dalle seguenti considerazioni. Nel funzionamento a carico nominale la corrente magnetizzante è inferiore alla corrente a vuoto (E < E0), in genere inferiore al 50% della corrente nominale. In corto circuito la corrente assorbita è molto più grande della corrente nominale mentre, essendo la f.e.m. indotta in prima approssimazione pari alla metà della tensione di alimentazione, la corrente magnetizzante è più piccola di quella a carico nominale. La corrente magnetizzante in corto circuito è pertanto trascurabile ai fini del calcolo della corrente di avviamento.
All’aumentare della velocità del sistema da zero al valore nominale la corrente diminuisce fino a raggiungere il valore nominale.
L’aspetto meccanico dell’avviamento riguarda la coppia di avviamento che è proporzionale alla resistenza di rotore ed al quadrato della tensione di alimentazione:
2avv srVRKC ′≅ (6.7-2)
Affinché il sistema si avvii è necessario che tale coppia sia maggiore della coppia resistente, ovvero della coppia del carico e di quella dovuta alle perdite per attrito e ventilazione. Se tale condizione non è soddisfatta il sistema non si avvia ed il persistere dell’elevata corrente di avviamento danneggerebbe il motore se non si intervenisse aprendo l’interruttore di macchina. Si consideri inoltre che il tempo necessario per avviare il sistema ovviamente diminuisce all’aumentare della coppia motrice e quindi nella quasi totalità delle applicazioni è opportuno avere una coppia motrice quanto più possibile elevata.
Per quanto riguarda la coppia di avviamento si deve ricordare che il rendimento a regime è tanto più elevato quanto è più piccolo lo scorrimento di funzionamento, ovvero quanto è più elevata la derivata della caratteristica elettromeccanica per piccoli scorrimenti. Per piccoli valori dello scorrimento la caratteristica elettromeccanica può essere approssimata con la retta (Fig. 6.7-5):
9 In effetti la corrente di avviamento presenta un transitorio elettrico con una componente unidirezionale smorzata. Ipotizzando di chiudere
l’interruttore di macchina al tempo t = 0 e considerando la seguente espressione della tensione di alimentazione nominale di fase:
)cos(ˆ)( ,, tVtv nsns ω=
si ottiene:
ϕ−ϕ−ω= ϕ
ω−)tan(, e)cos()cos(
ˆ)(
tns
avv tZ
Vti con ( ) ( )22
drdsrs XXRRZ ′++′+= e
′+′+
=ϕrs
drds
RRXX
arctg .
Poiché la costante di tempo)(
)tan(
rs
drds
RRXX
′+ω′+
=ω
ϕ=τ è piccola, la componente unidirezionale decade molto rapidamente e si può
considerare la sola componente alternata:
)cos(ˆ
)( , ϕ−ω= tZ
Vti ns
avv
che in termini di fasori è:
)(j)(,
drdsrs
nsavv XXRR
VI′++′+
≅&
& ; 22
,
)()( drdsrs
nsavv
XXRR
VI′++′+
≅
Rs Xds
Vs,n!
I!
drX'R'r!
!
avv
Fig. 6.7-4
( / )
0 s
C
R'rΨ = arctn K
Fig. 6.7-5

MACCHINE ASINCRONE 193
ssCsC
M
M2)( ≅ (6.7-3)
la cui derivata è:
MsC
ssC M2)tan(
d)(d =Ψ= (6.7-4)
Tenendo presente le espressioni della coppia massima e dello scorrimento per il quale si ha tale coppia:
)(2)(3
)(2
)(3 2
2
2222
2
zRkVkp
XRkRk
VkpCss
ss
dssss
ssM +ω
=
++ω
= (6.7-5)
zR
XRk
Rs r
dss
rM
′=
+
′=
222 )( (6.7-6)
la derivata della caratteristica risulta essere inversamente proporzionale alla resistenza di rotore:
rrssss
MR
KRzRk
zVkpsC
ssC
M ′=
′+ω== 11
)()(32
d)(d
22 (6.7-7)
Per ottenere quindi elevati valori del rendimento la resistenza di rotore deve essere piccola. Dalla (6.7-2) si deduce pertanto che macchine ad elevato rendimento hanno bassi valori della coppia di avviamento.
In secondo luogo, poiché la coppia di avviamento dipende dal quadrato della tensione di alimentazione, una pur piccola diminuzione di quest’ultima grandezza comporterebbe una elevata riduzione della coppia di avviamento. Ciò rende ancora più importante il problema dell’elevato valore della corrente di spunto. La rete di alimentazione infatti non è un generatore ideale di tensione ed all’aumentare della corrente assorbita aumentano le cadute e diminuisce la tensione ai morsetti del motore.
In conclusione all’avviamento del motore asincrono è necessario limitare la corrente assorbita dalla rete ed avere allo stesso tempo una coppia quanto più elevata possibile. Si vedrà che tali obiettivi sono in alcuni casi contrastanti.
6.7.2.a Motori con rotore avvolto
Nel caso di rotore di tipo avvolto, la coppia di spunto può essere variata a piacere variando il valore della resistenza di rotore tramite un reostato esterno messo in serie agli avvolgimenti di rotore. Una variazione della resistenza di rotore infatti, pur lasciando inalterato il valore di coppia massima (eq. (6.7-5)), comporta una variazione dello scorrimento per cui si ha tale valore di coppia (eq. (6.7-6)).
Con un opportuno valore di resistenza di rotore si può far coincidere la coppia di spunto con quella massima, (Fig. 6.7-6). È sufficiente infatti imporre che lo scorrimento sM sia pari ad 1.
Indicando con R′x il valore, moltiplicato per kt2 = kvki,
della resistenza esterna collegata in serie con una generica fase di rotore, dalla (6.7-6) si ottiene:
rdrdssrx RXRX)Rk(RzR ′−≅′−+=′−=′ 222 (6.7-8)
avendo trascurato 22 )( ss Rk rispetto a 2dX .
Man mano che la velocità del sistema aumenta si può inoltre diminuire la resistenza del reostato in modo tale che l’intero transitorio avvenga sempre con un valore di coppia pari a quello massimo.
Nelle applicazioni pratiche si usano però delle variazioni a gradino della resistenza aggiuntiva, come mostrato
0 0.5 1
CCM
s
R'x R'r≅ −dX
R'x = 0
Cr
Fig. 6.7-6: Situazione in cui la coppia massima si ha
all'avviamento.

194 Motori Asincroni
in Fig. 6.7-7, in cui è mostrato un reostato a tre gradini.10 In tal caso, durante l’avviamento, il punto di funzionamento percorre la spezzata in tratto continuo di Fig. 6.7-8 e la coppia si mantiene sempre a valori di poco inferiori alla coppia massima.
I valori, riportati allo statore, delle resistenze R′i necessarie per avere la coppia massima negli scorrimenti si sono sempre calcolati tramite la (6.7-6):
rdirdssii RXsRXRksR ′−≅′−+=′ 222 )( (6.7-9)
Il metodo descritto presenta anche il vantaggio di ridurre la corrente di avviamento e quindi risolve entrambi i problemi precedentemente discussi.
! ! !
!
!
!
!
!!
!
!
!!
sistemaanelli-spazzole
avvolgimentidi rotore
reostatotrifase
a
b
c
a
b
c
0 1 s
CC M
Cr
s1s2s3
Fig. 6.7-7 Fig. 6.7-8
6.7.2.b Motori con rotori a gabbia
Nel caso di rotori a gabbia le fasi dell’avvolgimento trifase equivalente alla gabbia di rotore non sono ovviamente accessibili e risultano pertanto sempre in cortocircuito. La caratteristica elettromeccanica di tali motori è unica e determinata dal progetto delle macchine. Poiché al crescere della potenza nominale aumenta anche il rendimento, i motori più grandi, con resistenza di rotore relativamente piccola, hanno una coppia di avviamento in p.u. più bassa ed una corrente di spunto in p.u. più elevata rispetto ai motori di piccola potenza. Motori di potenza inferiore a 10 kW non richiedono generalmente particolari accorgimenti per l’avviamento. Per i motori di potenza maggiore, al contrario, è necessario limitare la corrente di spunto. Ciò viene ottenuto riducendo la tensione di alimentazione durante l’avviamento. In tal modo si determina anche una elevata diminuzione della già modesta coppia di avviamento, proporzionale al quadrato della tensione, e questa tecnica può essere utilizzata soltanto quando la coppia resistente a basse velocità è molto piccola (ventilatori e pompe centrifughe). Per ridurre la tensione di alimentazione viene utizzato un autotrasformatore o il cosiddetto sistema di avviamento stella-triangolo o, ormai da diversi anni, un avviatore a tiristori a parzializzazione della tensione.
Avviamento con autotrasformatore Si consideri un motore asincrono che avviato alla tensione nominale assorba dalla rete di alimentazione una
corrente di spunto:
cc
n
drdsrs
navv Z
V
XXRR
VI =′++′+
≅22 )()(
essendo Vn la tensione stellata della rete e Zcc l’impedenza a rotore fermo di una delle fasi, considerate a stella. Quando il motore viene avviato tramite un autotrasformatore di rapporto Ka (Fig. 6.7-9), alla tensione Vn/Ka, la
corrente di avviamento assorbita dal motore è pari a:
a
avv
cc
anMavv K
IZ
KVI ==′ /,
10 I reostati manuali sono attualmente sostituiti da sistemi automatici di avviamento che, utilizzando teleruttori assoggettati a segnali di
velocità, inseriscono gli appropriati valori di resistenza aggiuntiva nelle fasi di rotore.
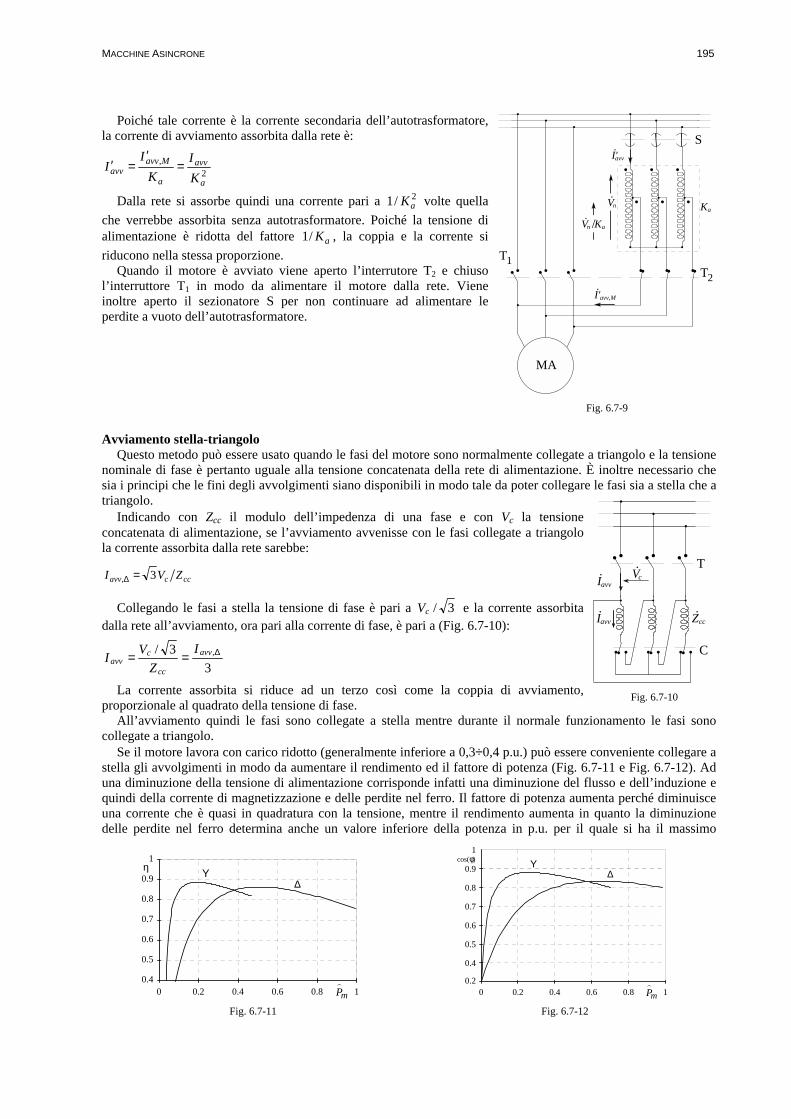
MACCHINE ASINCRONE 195
Poiché tale corrente è la corrente secondaria dell’autotrasformatore, la corrente di avviamento assorbita dalla rete è:
2,
a
avv
a
Mavvavv K
IK
II =
′=′
Dalla rete si assorbe quindi una corrente pari a 2/1 aK volte quella che verrebbe assorbita senza autotrasformatore. Poiché la tensione di alimentazione è ridotta del fattore aK/1 , la coppia e la corrente si riducono nella stessa proporzione.
Quando il motore è avviato viene aperto l’interrutore T2 e chiuso l’interruttore T1 in modo da alimentare il motore dalla rete. Viene inoltre aperto il sezionatore S per non continuare ad alimentare le perdite a vuoto dell’autotrasformatore.
Avviamento stella-triangolo Questo metodo può essere usato quando le fasi del motore sono normalmente collegate a triangolo e la tensione
nominale di fase è pertanto uguale alla tensione concatenata della rete di alimentazione. È inoltre necessario che sia i principi che le fini degli avvolgimenti siano disponibili in modo tale da poter collegare le fasi sia a stella che a triangolo.
Indicando con Zcc il modulo dell’impedenza di una fase e con Vc la tensione concatenata di alimentazione, se l’avviamento avvenisse con le fasi collegate a triangolo la corrente assorbita dalla rete sarebbe:
cccavv ZVI 3, =∆
Collegando le fasi a stella la tensione di fase è pari a 3/cV e la corrente assorbita dalla rete all’avviamento, ora pari alla corrente di fase, è pari a (Fig. 6.7-10):
33/ ,∆== avv
cc
cavv
IZ
VI
La corrente assorbita si riduce ad un terzo così come la coppia di avviamento, proporzionale al quadrato della tensione di fase.
All’avviamento quindi le fasi sono collegate a stella mentre durante il normale funzionamento le fasi sono collegate a triangolo.
Se il motore lavora con carico ridotto (generalmente inferiore a 0,3÷0,4 p.u.) può essere conveniente collegare a stella gli avvolgimenti in modo da aumentare il rendimento ed il fattore di potenza (Fig. 6.7-11 e Fig. 6.7-12). Ad una diminuzione della tensione di alimentazione corrisponde infatti una diminuzione del flusso e dell’induzione e quindi della corrente di magnetizzazione e delle perdite nel ferro. Il fattore di potenza aumenta perché diminuisce una corrente che è quasi in quadratura con la tensione, mentre il rendimento aumenta in quanto la diminuzione delle perdite nel ferro determina anche un valore inferiore della potenza in p.u. per il quale si ha il massimo
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
Vn!
Vn!
Ka
! ! !! ! ! !! ! ! !
!
!
!
/Ka
I'avv,M!
I'avv!
T1T2
S
MA
Fig. 6.7-9
Vc!
Zcc
!
! ! !! !
!
!
!
Iavv
T
! !!
! ! ! ! ! !
!
! !
!
C
!
Iavv!
Fig. 6.7-10
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
η
)Pm
Y∆
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
cos( )φ
)Pm
0.2
Y∆
Fig. 6.7-11 Fig. 6.7-12
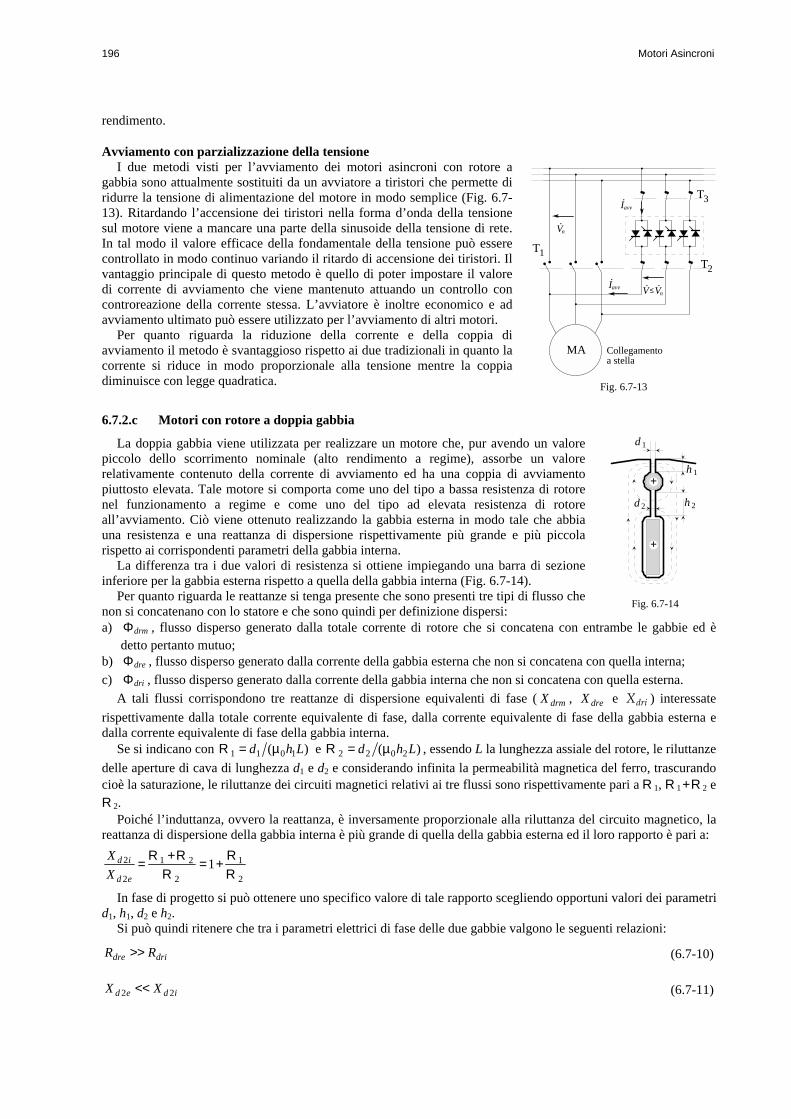
196 Motori Asincroni
rendimento.
Avviamento con parzializzazione della tensione I due metodi visti per l’avviamento dei motori asincroni con rotore a
gabbia sono attualmente sostituiti da un avviatore a tiristori che permette di ridurre la tensione di alimentazione del motore in modo semplice (Fig. 6.7-13). Ritardando l’accensione dei tiristori nella forma d’onda della tensione sul motore viene a mancare una parte della sinusoide della tensione di rete. In tal modo il valore efficace della fondamentale della tensione può essere controllato in modo continuo variando il ritardo di accensione dei tiristori. Il vantaggio principale di questo metodo è quello di poter impostare il valore di corrente di avviamento che viene mantenuto attuando un controllo con controreazione della corrente stessa. L’avviatore è inoltre economico e ad avviamento ultimato può essere utilizzato per l’avviamento di altri motori.
Per quanto riguarda la riduzione della corrente e della coppia di avviamento il metodo è svantaggioso rispetto ai due tradizionali in quanto la corrente si riduce in modo proporzionale alla tensione mentre la coppia diminuisce con legge quadratica.
6.7.2.c Motori con rotore a doppia gabbia
La doppia gabbia viene utilizzata per realizzare un motore che, pur avendo un valore piccolo dello scorrimento nominale (alto rendimento a regime), assorbe un valore relativamente contenuto della corrente di avviamento ed ha una coppia di avviamento piuttosto elevata. Tale motore si comporta come uno del tipo a bassa resistenza di rotore nel funzionamento a regime e come uno del tipo ad elevata resistenza di rotore all’avviamento. Ciò viene ottenuto realizzando la gabbia esterna in modo tale che abbia una resistenza e una reattanza di dispersione rispettivamente più grande e più piccola rispetto ai corrispondenti parametri della gabbia interna.
La differenza tra i due valori di resistenza si ottiene impiegando una barra di sezione inferiore per la gabbia esterna rispetto a quella della gabbia interna (Fig. 6.7-14).
Per quanto riguarda le reattanze si tenga presente che sono presenti tre tipi di flusso che non si concatenano con lo statore e che sono quindi per definizione dispersi: a) drmΦ , flusso disperso generato dalla totale corrente di rotore che si concatena con entrambe le gabbie ed è
detto pertanto mutuo; b) dreΦ , flusso disperso generato dalla corrente della gabbia esterna che non si concatena con quella interna; c) driΦ , flusso disperso generato dalla corrente della gabbia interna che non si concatena con quella esterna.
A tali flussi corrispondono tre reattanze di dispersione equivalenti di fase ( drmX , dreX e driX ) interessate rispettivamente dalla totale corrente equivalente di fase, dalla corrente equivalente di fase della gabbia esterna e dalla corrente equivalente di fase della gabbia interna.
Se si indicano con )( 1011 Lhd µ=R e )( 2022 Lhd µ=R , essendo L la lunghezza assiale del rotore, le riluttanze delle aperture di cava di lunghezza d1 e d2 e considerando infinita la permeabilità magnetica del ferro, trascurando cioè la saturazione, le riluttanze dei circuiti magnetici relativi ai tre flussi sono rispettivamente pari a R1, R1+R2 e R2.
Poiché l’induttanza, ovvero la reattanza, è inversamente proporzionale alla riluttanza del circuito magnetico, la reattanza di dispersione della gabbia interna è più grande di quella della gabbia esterna ed il loro rapporto è pari a:
2
1
2
21
2
2 1RR
RRR +=+=
ed
id
XX
In fase di progetto si può ottenere uno specifico valore di tale rapporto scegliendo opportuni valori dei parametri d1, h1, d2 e h2.
Si può quindi ritenere che tra i parametri elettrici di fase delle due gabbie valgono le seguenti relazioni:
dridre RR >> (6.7-10)
ided XX 22 << (6.7-11)
!
!
!
!
!
!
!
Vn!
! ! !! ! ! !! ! ! !
!
!
!
Iavv!
Iavv!
T1T2
MA
!
!
!
!
!
!
!! ! !! ! T3
V!
Vn!
≤
Collegamentoa stella
Fig. 6.7-13
d 1
d 2
h 1
h 2
+
+
Fig. 6.7-14

MACCHINE ASINCRONE 197
Per quanto riguarda la rete equivalente del motore a doppia gabbia si tenga presente che, a meno della caduta di tensione sulla reattanza di dispersione mutua drmX dovuta alla totale corrente di rotore, i rami elettrici relativi alle due gabbie sono sottoposti alla stessa f.e.m. indotta dal flusso principale. La rete equivalente riferita allo statore è pertanto quella di Fig. 6.7-15.
Rs Xds
Vs! Es
!
E'r!Is
!
drmX'I'r!
=
Rfe X(
Ifs!
I!
Ims!
sµ
!
s!
R're
sµ
dreX' I're!
I'ri!
sR'ri
driX'
ω
CC avv
O mω/p
Ci
Ce
Fig. 6.7-15 Fig. 6.7-16
Analogamente a quanto fatto per la macchina con rotore ad una sola gabbia, tramite la rete equivalente è possibile studiare il funzionamento del motore a doppia gabbia al variare dello scorrimento.
In Fig. 6.7-16 è mostrata una tipica caratteristica meccanica dei motori a doppia gabbia, dalla quale risulta evidente l’elevato valore della coppia di avviamento. Nella stessa figura sono riportati i contributi delle due gabbie alla coppia risultante. È tuttavia opportuno sottolineare che Ce e Ci non corrispondono alle caratteristiche meccaniche delle singole gabbie in quanto esse non sono né magneticamente né elettricamente indipendenti.
In Fig. 6.7-17 è riportato il luogo geometrico descritto dall’estremo della corrente di statore al variare dello scorrimento, ovvero quello che nel caso di rotore a singola gabbia risulterà essere circolare.
Senza risolvere la rete equivalente al variare dello scorrimento, per analizzare qualitativamente il comportamento del motore a doppia gabbia è sufficiente considerare il funzionamento all’avviamento e quello a regime (piccoli scorrimenti).
In primo luogo è opportuno tener presente che sulla base delle relazioni (6.7-10) e (6.7-11) è possibile trascurare la reattanza di dispersione della gabbia esterna rispetto alla resistenza. I loro valori sono infatti rispettivamente più piccoli e più grandi dei corrispondenti parametri della gabbia interna, che a loro volta sono dello stesso ordine di grandezza. In prima approssimazione si può pertanto porre:
sRZ rere =& (6.7-12)
dririri jXsRZ +=& (6.7-13)
All’avviamento (s = 1) l’impedenza della gabbia interna è più grande di quella della gabbia esterna a causa della reattanza di dispersione. La maggior parte della corrente di rotore fluisce pertanto nella gabbia esterna che, essendo ad elevata resistenza, dà luogo ad una elevata coppia di spunto, limitando al contempo la corrente di avviamento.
Per piccoli scorrimenti, al contrario, la reattanza di dispersione Xdri è trascurabile rispetto all’elevato valore Rri/s e la ripartizione della corrente di rotore dipende quasi esclusivamente dai valori delle resistenze delle due gabbie che sono in parallelo. Nelle due gabbie si ha circa la stessa densità di corrente, la resistenza equivalente è piccola, essendo data dal parallelo delle due resistenze, e la macchina lavora con bassi scorrimenti ed elevati rendimenti.
6.7.2.d Motori con rotore a barre alte (addensamento di corrente)
La gabbia a barre alte permette di ottenere una resistenza di rotore fortemente dipendente dalla frequenza, in modo tale da avere un valore piccolo a regime (rendimento elevato) ed un valore più elevato all’avviamento.
Si consideri la barra alta di Fig. 6.7-18, in cui è evidenziato l’andamento qualitativo del flusso disperso dovuto alla corrente di barra. È evidente che la parte di barra prossima al fondo della cava (punto A) concatena una
s = 1
s = 0,5s = 0,1
s = 0s =
O Re
Im
∞
Vsj
Fig. 6.7-17

198 Motori Asincroni
maggior quantità di flusso disperso rispetto alla parte più vicina al traferro (punto B). Se si divide idealmente la barra in n parti di uguale sezione, da un punto di vista elettrico la barra può essere pensata come il parallelo di n bipoli ohmico-induttivi di uguale resistenza (Fig. 6.7-19). Per quanto detto sul flusso concatenato l’induttanza dei bipoli non è uguale e cresce man mano che si considerano parti di barra più interne al rotore.
A regime la frequenza di rotore è molto bassa e le reattanze dei bipoli sono trascurabili rispetto alle resistenze. L’impedenza della barra si riduce praticamente ad una resistenza pari al parallelo delle n resistenze R. All’avviamento, al contrario, la frequenza di rotore è pari a quella di statore e l’effetto induttivo è dominante rispetto a quello resistivo. La corrente nel bipolo rappresentativo della parte di barra vicina al traferro sarà la più elevata perché tale bipolo ha la minima induttanza, mentre nel bipolo rappresentativo della parte di barra più interna la corrente sarà molto più piccola. Nel continuo, ciò significa che la densità di corrente nella barra è alta in prossimità del traferro e molto bassa nel fondo della cava. La corrente pertanto interessa una superficie della barra inferiore a quella geometrica e la resistenza è quindi più elevata di quella che si avrebbe in corrente continua o a frequenze molto basse.
Questo fenomeno permette quindi un tipo di funzionamento che si avvicina a quello del motore a doppia gabbia e spesso il progetto è tale per cui si cerca non tanto di aumentare la coppia di spunto, quanto di limitare la corrente di avviamento.
!A
!BJ
x
= 50 Hzfs
fsf <<
R L1
R
R
L2
Ln
!
!
!
!
!
!
! !
R Li Li > Li −1
ω
ω
ω
ω
Fig. 6.7-18 Fig. 6.7-19
6.7.3 CLASSIFICAZIONE NEMA DEI MOTORI ASINCRONI
La National Electrical Manufacturers’ Association (NEMA) americana classifica i motori asincroni con rotore non avvolto in base alla caratteristica meccanica ed alla corrente di spunto. I motori sono distinti in quattro classi (Fig. 6.7-20).
Motori di tipo A I motori di tipo A sono caratterizzati da una gabbia a bassa resistenza e pertanto il loro scorrimento nominale è
compreso tra 0,015 e 0,05. Il valore della coppia di avviamento non si discosta molto da quello della coppia nominale (0,7÷1,3 p.u.), la corrente di avviamento può anche essere superiore a 8 p.u. e la coppia massima è superiore a 2 p.u. Data l’elevata corrente di spunto, quelli di potenza superiore a 7,5 kW non vengono avviati a piena tensione e sono quindi adatti per carichi meccanici con basse coppie di avviamento (ventilatori e pompe centrifughe).
Motori di tipo B La caratteristica meccanica dei motori di tipo B è simile a quella del tipo A con l’eccezione della coppia
massima che è inferiore. Ciò è dovuto ad una più elevata reattanza di dispersione, necessaria per limitare la corrente di spunto. Tale corrente risulta infatti pari a 0,75 volte la corrente di spunto dei motori di tipo A, a parità di coppia di avviamento. Anche in questo caso lo scorrimento nominale è inferiore a 0,05. Questa classe ricopre la maggior parte delle applicazione per le quali non è richiesta una elevata coppia di spunto. Il rotore è a barre alte o a doppia gabbia con valori della resistenza della gabbia esterna non molto elevati.
Motori di tipo C Il rotore dei motori di tipo C è a doppia gabbia con un elevato valore della resistenza della gabbia esterna. Ciò
permette di ottenere una elevata coppia di spunto (2÷2,5 p.u.) ed una limitata corrente di avviamento. In genere il valore dello scorrimento nominale è leggermente superiore a quello delle classi precedenti, ma è comunque inferiore a 0,05. Questo tipo di motore è usato in tutte le applicazioni per le quali è richiesta una elevata coppia di avviamento (compressori, pompe alternative, ecc.).

MACCHINE ASINCRONE 199
Motori di tipo D Questi motori sono caratterizzati da una elevata resistenza della gabbia che permette di avere la coppia massima
per elevati valori di scorrimento (in Fig. 6.7-20 la coppia massima si ha per s = 1), elevata coppia di spunto (2,7 p.u.) e limitata corrente di avviamento. Ciò determina tuttavia un valore dello scorrimento nominale molto elevato (0,08÷0,15) e quindi un basso rendimento.
L’elevato valore della resistenza della gabbia è ottenuto anche utilizzando materiali con resistività più elevata di quella del rame o dell’alluminio (ad esempio bronzi). A parità di potenza sono motori più grandi, e quindi più costosi, dei precedenti a causa dell’elevato calore che deve essere smaltito dal rotore. Trovano applicazione nei casi in cui è richiesto un avviamento molto rapido (da zero alla velocità nominale la coppia è sempre molto alta). Abbinati a volani vengono utilizzati nelle applicazioni per le quali vengono richiesti picchi di potenza molto elevati e periodici (presse e taglierine).11
0.2 0.4 0.6 0.8 1
1
2
0
B
C
DC)
A
( )ωm / ω/p Fig. 6.7-20
11 La pressa è un tipico esempio di carico periodico, per il quale è richiesto un elevato valore di potenza per un breve intervallo di tempo.
Dimensionare il motore per il picco di potenza richiesto dalla pressa porterebbe ad utilizzare motori molto grandi che opererebbero quasi sempre a carichi bassi. Il motore viene invece dimensionato per la potenza media, risparmiando notevolmente sul costo d’impianto, ed i picchi di potenza vengono alimentati tramite l’energia cinetica accumulata in un volano. Poiché l’energia cinetica è proporzionale al quadrato della velocità, la restituzione di tale energia da parte del volano avviene con una elevata riduzione della velocità del sistema in un breve intervallo di tempo. Compito del motore asincrono è quello di accelerare di nuovo il sistema in modo tale da poter ripetere il ciclo. Il motore di tipo D si presta molto bene a questo tipo di funzionamento perché gli elevati valori di coppia che si hanno a basse velocità permettono buone accelerazioni del volano, riducendo gli intervalli di tempo tra pressature successive.

200 Funzionamento da Generatore
6.8 FUNZIONAMENTO DA GENERATORE
È stato detto che nell’intervallo di scorrimento (−R′r /(ks2Rs) ≅ − 1< )s′< s < s″(< 0), ovvero nell’intervallo di
velocità (ω/p<)ω″m< ωm < ω′m(<2ω/p), la macchina asincrona si comporta da generatore, in quanto assorbe potenza meccanica ed eroga potenza elettrica (attiva). Si vogliono ora determinare le condizioni reali, elettriche e meccaniche, che si devono verificare affinché la macchina possa erogare potenza elettrica.
Si consideri una macchina asincrona, alimentata da una rete di potenza infinita, funzionante da motore a vuoto, con una velocità quindi prossima a quella sincrona ω/p e uno scorrimento positivo molto piccolo (punto A di Fig. 6.8-1). Affinché la macchina possa funzionare da generatore, si devono raggiungere valori negativi dello scorrimento; la velocità meccanica deve cioè essere maggiore di quella sincrona. Ciò è ovviamente possibile soltanto se il rotore viene accelerato tramite un motore primo. Continuando a considerare come verso di riferimento per la coppia del motore primo quello della coppia resistente (coppia positiva quando opposta al verso della velocità sincrona), il motore primo, per accelerare il rotore, dovrà fornire un valore di coppia negativo, indicato in Fig. 6.8-1 con CMP. Il rotore accelera e raggiunge la velocità per la quale il valore della coppia elettromagnetica è uguale a CMP (punto B di Fig. 6.8-1), la velocità è maggiore di quella sincrona e lo scorrimento è pertanto negativo.
Per semplicità è conveniente considerare il parametro s positivo e farlo precedere dal segno meno. In tal caso la rete equivalente riferita allo statore della macchina asincrona funzionante da generatore è quella di Fig. 6.8-2, in cui l’intera resistenza di una fase di rotore è pari a −R′r /s. Le equazioni che ne descrivono il funzionamento a regime sono pertanto:
( )
+′=
′+′
′+
′−−=
++=
msrs
rdrr
sdss
III
EIXs
REIXRV
r
ss
&&&
&&
&&&
j0
j
(6.8-1)
Per determinare il relativo diagramma dei fasori è necessario determinare in primo luogo la relazione di fase tra la f.e.m. indotta di rotore )( sr EE && ≡′ e la corrente di rotore rI ′& . A tale scopo si espliciti la corrente di rotore tramite la seconda delle (6.8-1):
[ ]BAEba
bba
aEbaba
baEba
EXsR
EI rrrr
drr
rr jj
)j)(j(j
jj 2222 −−′=
+−
+−′=
−−+−
−−′=+−′
=′+′−
′=′ &&&
&&& (6.8-2)
La (6.8-2) mostra chiaramente che la corrente di rotore è pari alla somma di una componente in opposizione di fase rispetto alla rE′& ( rEA ′− & ) e di una componente in quadratura, in ritardo, rispetto alla rE′& ( rEB ′− &j ), come mostrato in Fig. 6.8-3.
In Fig. 6.8-4 è mostrato il diagramma dei fasori completo, mentre in Fig. 6.8-5 è mostrato come la componente della corrente di statore lungo la direzione della tensione di statore sia negativa, a riprova che la potenza elettrica attiva è negativa e quindi erogata dalla macchina.
Dalla Fig. 6.8-5 è inoltre evidente che anche nel funzionamento da generatore la corrente di statore è in ritardo rispetto alla tensione ai morsetti. Ciò sta ad indicare che, qualunque sia il tipo di funzionamento, la macchina asincrona assorbe sempre potenza reattiva; tale potenza è necessaria per mantenere il flusso principale (e i flussi dispersi), senza il quale la macchina non potrebbe funzionare in quanto non sarebbero presenti le f.e.m. indotte. Ciò dipende dal fatto che la macchina asincrona, essendo sprovvista di un proprio sistema di eccitazione, deve necessariamente assorbire la corrente magnetizzante attraverso i morsetti di macchina.
ω
C
CMP
0 mω/p!
!
A
B
Rs Xds
Vs! Es
!
E'r!Is
!
drX'I'r!
=
R'r s/
Rfe X s(
Ifs!
I!
Ims!
sµ
µ
−
Fig. 6.8-1 Fig. 6.8-2
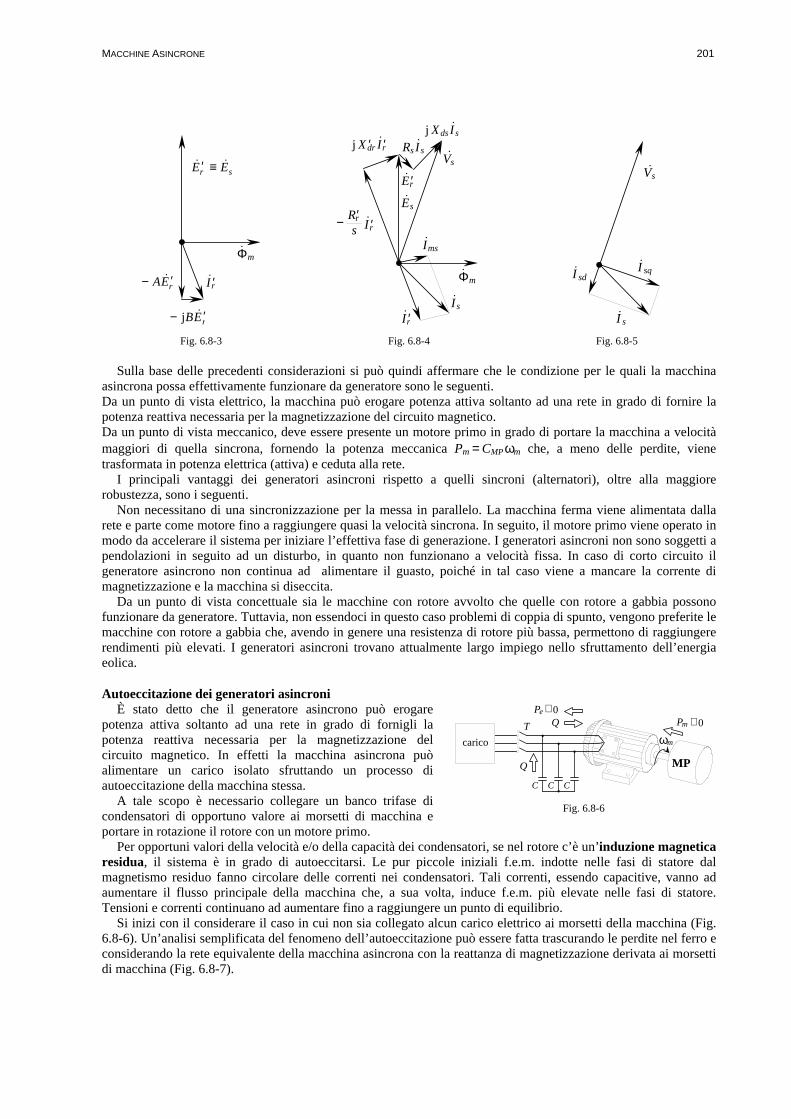
MACCHINE ASINCRONE 201
Sulla base delle precedenti considerazioni si può quindi affermare che le condizione per le quali la macchina asincrona possa effettivamente funzionare da generatore sono le seguenti. Da un punto di vista elettrico, la macchina può erogare potenza attiva soltanto ad una rete in grado di fornire la potenza reattiva necessaria per la magnetizzazione del circuito magnetico. Da un punto di vista meccanico, deve essere presente un motore primo in grado di portare la macchina a velocità maggiori di quella sincrona, fornendo la potenza meccanica Pm = CMPωm che, a meno delle perdite, viene trasformata in potenza elettrica (attiva) e ceduta alla rete.
I principali vantaggi dei generatori asincroni rispetto a quelli sincroni (alternatori), oltre alla maggiore robustezza, sono i seguenti.
Non necessitano di una sincronizzazione per la messa in parallelo. La macchina ferma viene alimentata dalla rete e parte come motore fino a raggiungere quasi la velocità sincrona. In seguito, il motore primo viene operato in modo da accelerare il sistema per iniziare l’effettiva fase di generazione. I generatori asincroni non sono soggetti a pendolazioni in seguito ad un disturbo, in quanto non funzionano a velocità fissa. In caso di corto circuito il generatore asincrono non continua ad alimentare il guasto, poiché in tal caso viene a mancare la corrente di magnetizzazione e la macchina si diseccita.
Da un punto di vista concettuale sia le macchine con rotore avvolto che quelle con rotore a gabbia possono funzionare da generatore. Tuttavia, non essendoci in questo caso problemi di coppia di spunto, vengono preferite le macchine con rotore a gabbia che, avendo in genere una resistenza di rotore più bassa, permettono di raggiungere rendimenti più elevati. I generatori asincroni trovano attualmente largo impiego nello sfruttamento dell’energia eolica.
Autoeccitazione dei generatori asincroni È stato detto che il generatore asincrono può erogare
potenza attiva soltanto ad una rete in grado di fornigli la potenza reattiva necessaria per la magnetizzazione del circuito magnetico. In effetti la macchina asincrona può alimentare un carico isolato sfruttando un processo di autoeccitazione della macchina stessa.
A tale scopo è necessario collegare un banco trifase di condensatori di opportuno valore ai morsetti di macchina e portare in rotazione il rotore con un motore primo.
Per opportuni valori della velocità e/o della capacità dei condensatori, se nel rotore c’è un’induzione magnetica residua, il sistema è in grado di autoeccitarsi. Le pur piccole iniziali f.e.m. indotte nelle fasi di statore dal magnetismo residuo fanno circolare delle correnti nei condensatori. Tali correnti, essendo capacitive, vanno ad aumentare il flusso principale della macchina che, a sua volta, induce f.e.m. più elevate nelle fasi di statore. Tensioni e correnti continuano ad aumentare fino a raggiungere un punto di equilibrio.
Si inizi con il considerare il caso in cui non sia collegato alcun carico elettrico ai morsetti della macchina (Fig. 6.8-6). Un’analisi semplificata del fenomeno dell’autoeccitazione può essere fatta trascurando le perdite nel ferro e considerando la rete equivalente della macchina asincrona con la reattanza di magnetizzazione derivata ai morsetti di macchina (Fig. 6.8-7).
B
Φ
A &′Ir
sr EE && ≡′
rE ′− &
rE ′− &j
&m
&Vs
&Ims
&′Ir
& ′Er
&Es
j ′ ′X Idr r&
j X Ids s&
R Is s&
− ′′
Rs Ir
r&
&Φm
&Is
&Vs
&I sq
&I s
&I sd
Fig. 6.8-3 Fig. 6.8-4 Fig. 6.8-5
PePm 0
MP!
!
!
carico ω≅
0≅
Q
QTm
CC C!
Fig. 6.8-6

202 Funzionamento da Generatore
R
Rs Lds
Es!
r
drL
I!
's
r '
'Is!
!
!
!
!
L
I!
sµ
µ
R 'r+ jω( + )
1 s+s−jωj− 1
ωC
Ic!
Vs!
Es!
s
!
!
L
I!
sµ
µjωj− 1ωC
Ic!
Vs!
Fig. 6.8-7 Fig. 6.8-8
Considerando che la potenza attiva erogata dalla macchina è nulla e che le perdite nel rame sono piccole, la
potenza meccanica assorbita dalla macchina 3(1+s) / (−s)R′r I′r2 è trascurabile. Ciò significa che lo scorrimento e la corrente di rotore sono praticamente nulli, ovvero che la resistenza (1+s) / (−s)R′r è molto elevata.
Per la pulsazione elettrica delle grandezze di statore si ha pertanto:
mpω≅ω
ed è quindi imposta dalla velocità meccanica. Essendo inoltre I′r ≅ 0, la rete può essere semplificata come in Fig. 6.8-8, dalla quale si ottiene:
−=
ω≅ω==
ω−≅
ω−==
µ
µµµµ
Cs
ssmssss
Cm
Css
II
ILpILEV
ICp
IC
EV
&&
&(
&(
&&
&&&&
jj
1j1j
ovvero, in termini di valori efficaci:
ω≅
ω≅
µµ
µ
ssms
sm
s
ILpV
ICp
V
(
1 (6.8-3)
Il fenomeno dell’autoeccitazione si evolve e raggiunge un punto di equilibrio (I *µs, V *
s) quando sono verificate
contemporaneamente le relazioni (6.8-3), ovvero nel punto di intersezione tra la retta sm
s ICp
V µω≅ 1 e la
caratteristica non lineare della macchina )( sssms IfILpV µµµ =ω≅(
(Fig. 6.8-9).
Dalla Fig. 6.8-9 si nota anche che l’autoeccitazione può avvenire soltanto se l’angolo
1= 1−
Cωptanα
mè
minore dell’angolo critico cα , relativo al valore non saturo dell’induttanza di magnetizzazione (induttanza del solo traferro, )Lp(tan smc δωα 1−= ). L’autoeccitazione è quindi possibile soltanto se è verificata la seguente disuguaglianza:
smm
LpCp δω<
ω1
ovvero:
sm
LpC
δ>ω 2
2 1 (6.8-4)
Dalla relazione (6.8-4) si ottiene che ad ogni valore di capacità C
corrisponde un valore critico di velocità meccanica, s
critm CLp δ=ω 11
, ,
Vs
Ip C
s
m
µ
ω
I sµ
f I s( )µ
αα c
!
p L Im s sω δ µ
I sµ*
Vs*
O
Fig. 6.8-9
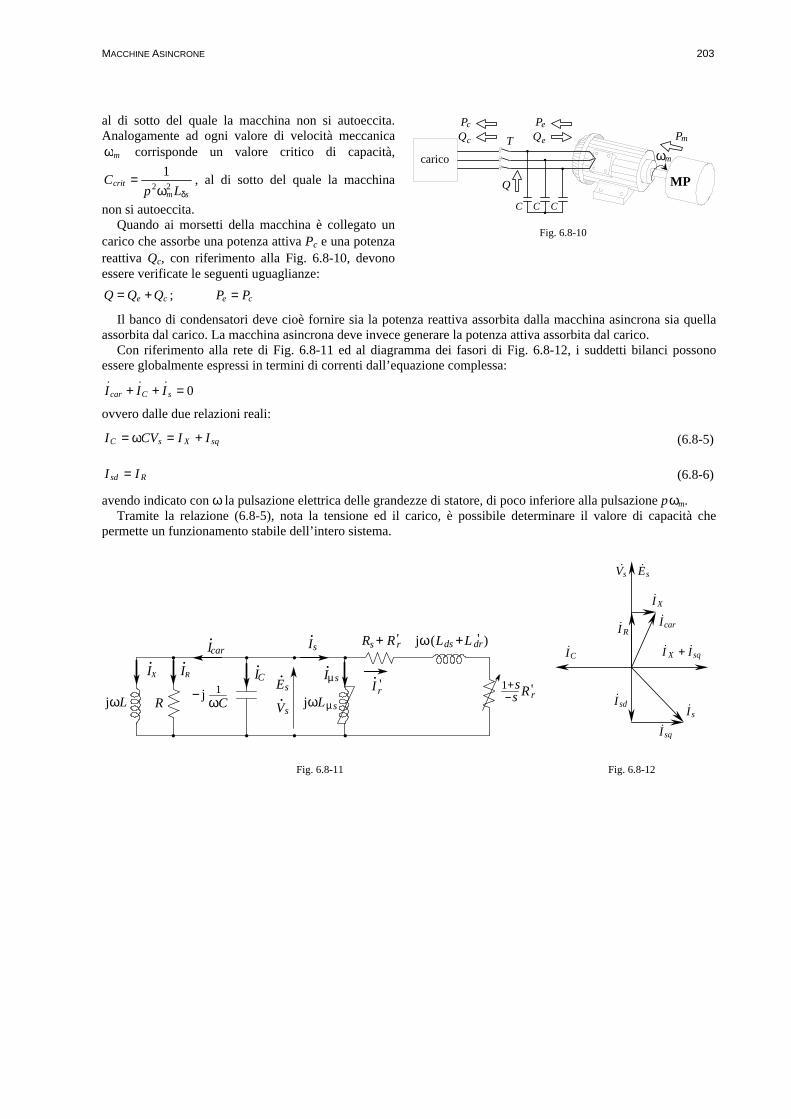
MACCHINE ASINCRONE 203
al di sotto del quale la macchina non si autoeccita. Analogamente ad ogni valore di velocità meccanica
mω corrisponde un valore critico di capacità,
smcrit
LpC
δω= 22
1 , al di sotto del quale la macchina
non si autoeccita. Quando ai morsetti della macchina è collegato un
carico che assorbe una potenza attiva Pc e una potenza reattiva Qc, con riferimento alla Fig. 6.8-10, devono essere verificate le seguenti uguaglianze:
ce QQQ += ; ce PP =
Il banco di condensatori deve cioè fornire sia la potenza reattiva assorbita dalla macchina asincrona sia quella assorbita dal carico. La macchina asincrona deve invece generare la potenza attiva assorbita dal carico.
Con riferimento alla rete di Fig. 6.8-11 ed al diagramma dei fasori di Fig. 6.8-12, i suddetti bilanci possono essere globalmente espressi in termini di correnti dall’equazione complessa:
0=++ sCcar III &&&
ovvero dalle due relazioni reali:
sqXsC IICVI +=ω= (6.8-5)
Rsd II = (6.8-6)
avendo indicato con ω la pulsazione elettrica delle grandezze di statore, di poco inferiore alla pulsazione pωm. Tramite la relazione (6.8-5), nota la tensione ed il carico, è possibile determinare il valore di capacità che
permette un funzionamento stabile dell’intero sistema.
R
Rs Lds
Es!
r
drL
I!
's
r '
'Is!
!
!
!
!
L
I!
sµ
µ
R 'r+ jω( + )
1 s+s−jωj− 1
ωC
IC!
!
!
!
!
IR!
IX!
RLjω Vs!
Icar!
&Vs
&I sd
&Es
&I s
&Icar&I R
&I sq
& &I IX sq+&IC
&I X
Fig. 6.8-11 Fig. 6.8-12
PePm
MP!
!
CC C!
!
carico ω
Q
QTm
e
PcQc
Fig. 6.8-10
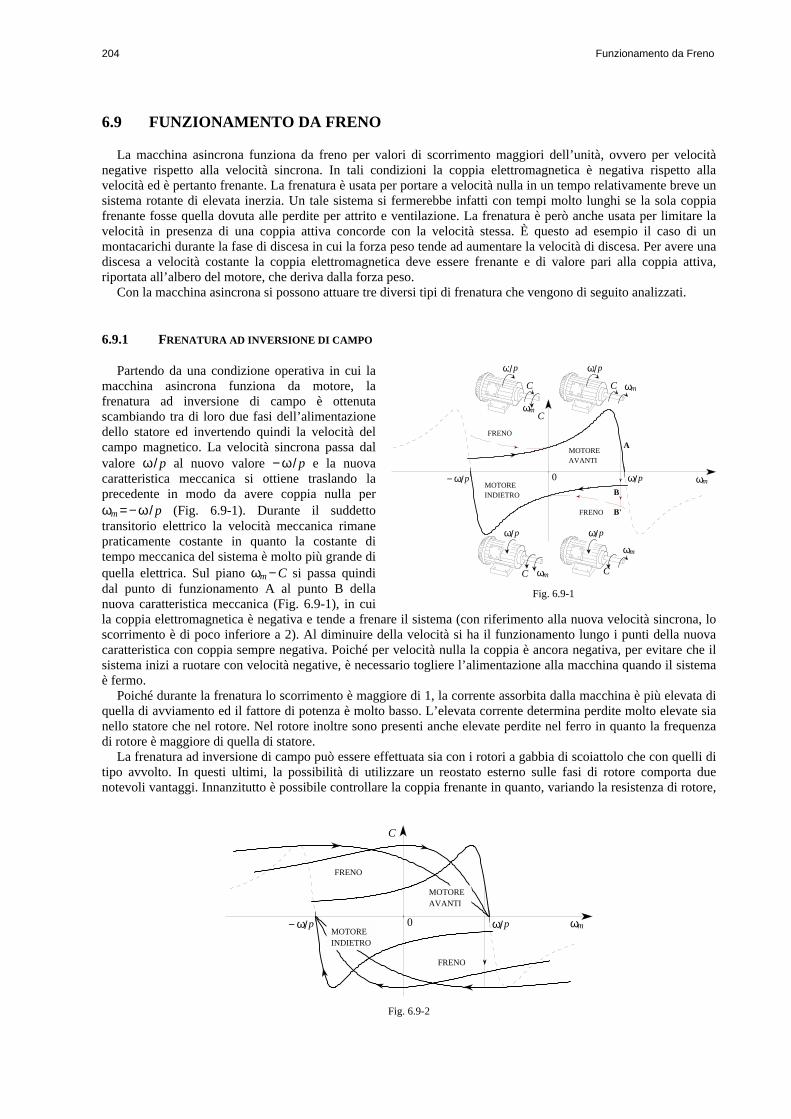
204 Funzionamento da Freno
6.9 FUNZIONAMENTO DA FRENO
La macchina asincrona funziona da freno per valori di scorrimento maggiori dell’unità, ovvero per velocità negative rispetto alla velocità sincrona. In tali condizioni la coppia elettromagnetica è negativa rispetto alla velocità ed è pertanto frenante. La frenatura è usata per portare a velocità nulla in un tempo relativamente breve un sistema rotante di elevata inerzia. Un tale sistema si fermerebbe infatti con tempi molto lunghi se la sola coppia frenante fosse quella dovuta alle perdite per attrito e ventilazione. La frenatura è però anche usata per limitare la velocità in presenza di una coppia attiva concorde con la velocità stessa. È questo ad esempio il caso di un montacarichi durante la fase di discesa in cui la forza peso tende ad aumentare la velocità di discesa. Per avere una discesa a velocità costante la coppia elettromagnetica deve essere frenante e di valore pari alla coppia attiva, riportata all’albero del motore, che deriva dalla forza peso.
Con la macchina asincrona si possono attuare tre diversi tipi di frenatura che vengono di seguito analizzati.
6.9.1 FRENATURA AD INVERSIONE DI CAMPO
Partendo da una condizione operativa in cui la macchina asincrona funziona da motore, la frenatura ad inversione di campo è ottenuta scambiando tra di loro due fasi dell’alimentazione dello statore ed invertendo quindi la velocità del campo magnetico. La velocità sincrona passa dal valore ω /p al nuovo valore − ω /p e la nuova caratteristica meccanica si ottiene traslando la precedente in modo da avere coppia nulla per ωm = − ω /p (Fig. 6.9-1). Durante il suddetto transitorio elettrico la velocità meccanica rimane praticamente costante in quanto la costante di tempo meccanica del sistema è molto più grande di quella elettrica. Sul piano ωm −C si passa quindi dal punto di funzionamento A al punto B della nuova caratteristica meccanica (Fig. 6.9-1), in cui la coppia elettromagnetica è negativa e tende a frenare il sistema (con riferimento alla nuova velocità sincrona, lo scorrimento è di poco inferiore a 2). Al diminuire della velocità si ha il funzionamento lungo i punti della nuova caratteristica con coppia sempre negativa. Poiché per velocità nulla la coppia è ancora negativa, per evitare che il sistema inizi a ruotare con velocità negative, è necessario togliere l’alimentazione alla macchina quando il sistema è fermo.
Poiché durante la frenatura lo scorrimento è maggiore di 1, la corrente assorbita dalla macchina è più elevata di quella di avviamento ed il fattore di potenza è molto basso. L’elevata corrente determina perdite molto elevate sia nello statore che nel rotore. Nel rotore inoltre sono presenti anche elevate perdite nel ferro in quanto la frequenza di rotore è maggiore di quella di statore.
La frenatura ad inversione di campo può essere effettuata sia con i rotori a gabbia di scoiattolo che con quelli di tipo avvolto. In questi ultimi, la possibilità di utilizzare un reostato esterno sulle fasi di rotore comporta due notevoli vantaggi. Innanzitutto è possibile controllare la coppia frenante in quanto, variando la resistenza di rotore,
0
C
−
FRENO
MOTORE
ωm
C
CC
C
AVANTI
FRENO
MOTOREINDIETRO
ω p/ ω p/
ωm
ωmω p/ω p/
ω p/ ω p/ωm
ωm
A
B
B'
Fig. 6.9-1
0
C
FRENO
MOTOREAVANTI
FRENO
MOTOREINDIETRO
ωm− ω p/ ω p/
Fig. 6.9-2
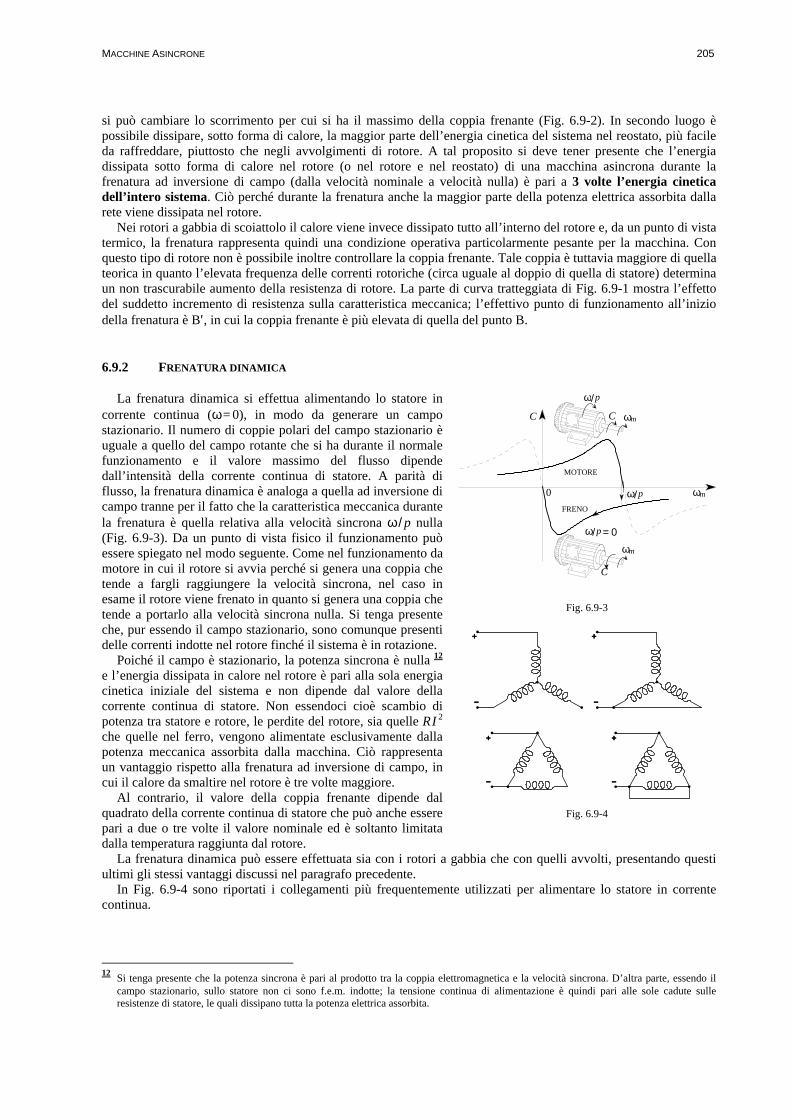
MACCHINE ASINCRONE 205
si può cambiare lo scorrimento per cui si ha il massimo della coppia frenante (Fig. 6.9-2). In secondo luogo è possibile dissipare, sotto forma di calore, la maggior parte dell’energia cinetica del sistema nel reostato, più facile da raffreddare, piuttosto che negli avvolgimenti di rotore. A tal proposito si deve tener presente che l’energia dissipata sotto forma di calore nel rotore (o nel rotore e nel reostato) di una macchina asincrona durante la frenatura ad inversione di campo (dalla velocità nominale a velocità nulla) è pari a 3 volte l’energia cinetica dell’intero sistema. Ciò perché durante la frenatura anche la maggior parte della potenza elettrica assorbita dalla rete viene dissipata nel rotore.
Nei rotori a gabbia di scoiattolo il calore viene invece dissipato tutto all’interno del rotore e, da un punto di vista termico, la frenatura rappresenta quindi una condizione operativa particolarmente pesante per la macchina. Con questo tipo di rotore non è possibile inoltre controllare la coppia frenante. Tale coppia è tuttavia maggiore di quella teorica in quanto l’elevata frequenza delle correnti rotoriche (circa uguale al doppio di quella di statore) determina un non trascurabile aumento della resistenza di rotore. La parte di curva tratteggiata di Fig. 6.9-1 mostra l’effetto del suddetto incremento di resistenza sulla caratteristica meccanica; l’effettivo punto di funzionamento all’inizio della frenatura è B′, in cui la coppia frenante è più elevata di quella del punto B.
6.9.2 FRENATURA DINAMICA
La frenatura dinamica si effettua alimentando lo statore in corrente continua (ω= 0), in modo da generare un campo stazionario. Il numero di coppie polari del campo stazionario è uguale a quello del campo rotante che si ha durante il normale funzionamento e il valore massimo del flusso dipende dall’intensità della corrente continua di statore. A parità di flusso, la frenatura dinamica è analoga a quella ad inversione di campo tranne per il fatto che la caratteristica meccanica durante la frenatura è quella relativa alla velocità sincrona ω /p nulla (Fig. 6.9-3). Da un punto di vista fisico il funzionamento può essere spiegato nel modo seguente. Come nel funzionamento da motore in cui il rotore si avvia perché si genera una coppia che tende a fargli raggiungere la velocità sincrona, nel caso in esame il rotore viene frenato in quanto si genera una coppia che tende a portarlo alla velocità sincrona nulla. Si tenga presente che, pur essendo il campo stazionario, sono comunque presenti delle correnti indotte nel rotore finché il sistema è in rotazione.
Poiché il campo è stazionario, la potenza sincrona è nulla 12 e l’energia dissipata in calore nel rotore è pari alla sola energia cinetica iniziale del sistema e non dipende dal valore della corrente continua di statore. Non essendoci cioè scambio di potenza tra statore e rotore, le perdite del rotore, sia quelle RI 2 che quelle nel ferro, vengono alimentate esclusivamente dalla potenza meccanica assorbita dalla macchina. Ciò rappresenta un vantaggio rispetto alla frenatura ad inversione di campo, in cui il calore da smaltire nel rotore è tre volte maggiore.
Al contrario, il valore della coppia frenante dipende dal quadrato della corrente continua di statore che può anche essere pari a due o tre volte il valore nominale ed è soltanto limitata dalla temperatura raggiunta dal rotore.
La frenatura dinamica può essere effettuata sia con i rotori a gabbia che con quelli avvolti, presentando questi ultimi gli stessi vantaggi discussi nel paragrafo precedente.
In Fig. 6.9-4 sono riportati i collegamenti più frequentemente utilizzati per alimentare lo statore in corrente continua.
12 Si tenga presente che la potenza sincrona è pari al prodotto tra la coppia elettromagnetica e la velocità sincrona. D’altra parte, essendo il
campo stazionario, sullo statore non ci sono f.e.m. indotte; la tensione continua di alimentazione è quindi pari alle sole cadute sulle resistenze di statore, le quali dissipano tutta la potenza elettrica assorbita.
0
C
FRENO
MOTORE
C
ω p/
ωm
ωmω p/
C
ω p/ωm
= 0
Fig. 6.9-3
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!++++
−−−−
++++
−−−−
++++
−−−−
++++
−−−−
Fig. 6.9-4

206 Funzionamento da Freno
6.9.3 FRENATURA A RECUPERO
Parte dell’energia cinetica del sistema può essere convertita in energia elettrica e restituita alla rete di alimentazione. Anche nel funzionamento da generatore la coppia elettromagnetica è infatti negativa rispetto al verso di rotazione e ciò determina un effetto frenante sul sistema. È stato visto che la macchina asincrona funziona da generatore in un intervallo di velocità interno all’intervallo (ω/p, 2ω/p), ovvero per scorrimenti negativi maggiori di –1. Considerando un normale funzionamento da motore, è noto che la velocità non può in nessun caso superare la velocità sincrona ω/p e la macchina non può pertanto funzionare da generatore. Tale funzionamento può essere tuttavia ottenuto diminuendo istantaneamente la velocità sincrona tramite un aumento del numero di coppie polari. Ciò è realizzabile dotando lo statore di avvolgimenti formati da diverse parti che, a seconda di come vengono collegate, danno luogo a campi rotanti con diverse coppie polari (in genere, per contenere il costo aggiuntivo rispetto ai normali avvolgimenti, si usano due soli valori del numero di coppie polari). Indicando con p1 il numero di coppie polari minore, durante il normale funzionamento da motore la velocità del sistema è leggermente inferiore a ω/p1 (Fig. 6.9-5).
Per effettuare la frenatura a recupero si collegano le parti degli avvolgimenti di statore in modo da realizzare un campo con un numero di coppie polari p2 maggiore di p1, ottenendo quindi la velocità sincrona ω/p2 minore di ω/p1. In tal modo lo scorrimento assume un valore negativo e la macchina inizia a generare energia elettrica a scapito dell’energia cinetica dell’interno sistema. A meno del rendimento, l’energia elettrica generata è circa uguale alla variazione di energia cinetica [ ]2
22
1 )()()21( ppJ ω−ω , essendo J il momento di inerzia dell’intero sistema riportato all’albero della macchina asincrona. 13
La frenatura a recupero può essere effettuata soltanto con rotori di tipo a gabbia, che si adeguano automaticamente al numero di coppie polari del campo induttore, ed è utilizzata nei sistemi di sollevamento.
13 Se 21 2 pp ω>ω l’energia cinetica [ ]2
22
1 )2()()21( ppJ ω−ω viene dissipata e non convertita in energia elettrica, in quanto
nell’intervallo ),2( 12 pp ωω si ha il funzionamento da freno. L’energia recuperata a meno delle perdite in questo caso è
[ ]22 )(3)21( pJ ω .
0
C
m
GENERATORE
MOTORE
12 ω p/ω p/ ω
Fig. 6.9-5

MACCHINE ASINCRONE 207
6.10 DIAGRAMMA CIRCOLARE
Per rappresentare i possibili funzionamenti della macchina asincrona è utilizzato il diagramma circolare, dal quale è possibile valutare i valori delle grandezze che ne caratterizzano il funzionamento per ogni condizione operativa, ovvero per ogni valore dello scorrimento.
Il diagramma circolare trae origine dal fatto che, considerando una macchina asincrona alimentata a tensione costante, l’estremo della corrente di rotore rI ′& si muove su una circonferenza al variare dello scorrimento. Ciò può essere dimostrato considerando la rete equivalente di Thevenin riportata in Fig. 6.10-1, dalla quale si ottiene:
d
ss
drss
ss
drdssrss
ssr
XsRVk
XsRRkVk
XXksRRkVkI
j)(j)/(
)(j)/(
2
2
+=
+′+=
=′++′+
=′
&&
&&
(6.10-1)
Dalla (6.10-2) si ottiene:
d
ssr
dr X
VkIX
sRI&
&& j)(j −=′−′ (6.10-2)
Il secondo termine della (6.10-2) è un fasore che non dipende dallo scorrimento ed è in ritardo di 90° rispetto alla tensione. Al
variare dello scorrimento si ha pertanto che la somma tra il fasore rI ′& ed il fasore rd
IX
sR ′− &)(j , ad esso ortogonale, è
costante. Ciò sta ad indicare che l’estremo del fasore rI ′& è un punto di una circonferenza di diametro d
ss
XVk . Il
diagramma dei fasori per un generico valore dello scorrimento è riportato in Fig. 6.10-2, nella quale sono anche evidenziati due punti particolari della circonferenza: F0 e F-1. Il primo punto, in cui la corrente è nulla, è relativo al valore infinito di )(sR e quindi allo scorrimento pari a zero. Il secondo, in cui la corrente è massima e sfasata di
90° rispetto alla tensione, corrisponde a 0)( =sR , ovvero a 12 −≅′
−=ss
r
RkRs .
Per la corrente di statore si ha:
rmss III ′+= &&& (6.10-3)
in cui msI& è la corrente magnetizzante, che dipende dalla condizione operativa della macchina, ovvero dallo scorrimento, in quanto la f.e.m. indotta cambia al variare della corrente assorbita a causa delle diverse cadute di tensione sull’avvolgimento di statore. In prima approssimazione è però possibile trascurare tali variazioni e considerare msI& costante, pari al valore della corrente assorbita dalla macchina nel funzionamento a vuoto 0sI& 14.
Si può quindi porre:
s
ssss
sdss
ssms X
VkRVk
XRXRVII
µµ+≅
++==
j)j//()j( 000
&&&&& (6.10-4)
e fare pertanto riferimento alla rete equivalente di Fig. 6.10-3.
14 Poiché il diagramma circolare viene spesso costruito a partire da dati sperimentali, con il termine “corrente a vuoto” si intende la corrente
che la macchina assorbe nel funzionamento con coppia resistente nulla. A causa della coppia per attrito e ventilazione, la velocità non è però quella sincrona e la corrente di rotore, pur essendo in genere molto piccola, non è nulla. La corrente assorbita è quindi maggiore della corrente che si avrebbe con scorrimento nullo a causa delle perdite per attrito e ventilazione. In questo caso la resistenza da considerare in parallelo alla reattanza di magnetizzazione è ovviamente la R0, che tiene conto delle totali perdite rotazionali (perdite nel ferro e perdite per attrito e ventilazione).
Rs Xds drX'
I'r!
R'r /s
ksV!
s
ks ks2
Fig. 6.10-1
rI ′&
1−F!
!
!
F
rγ
0F
ssVk &
d
ss
XVk−&
j
rd
IX
sR ′− &)(j
Fig. 6.10-2
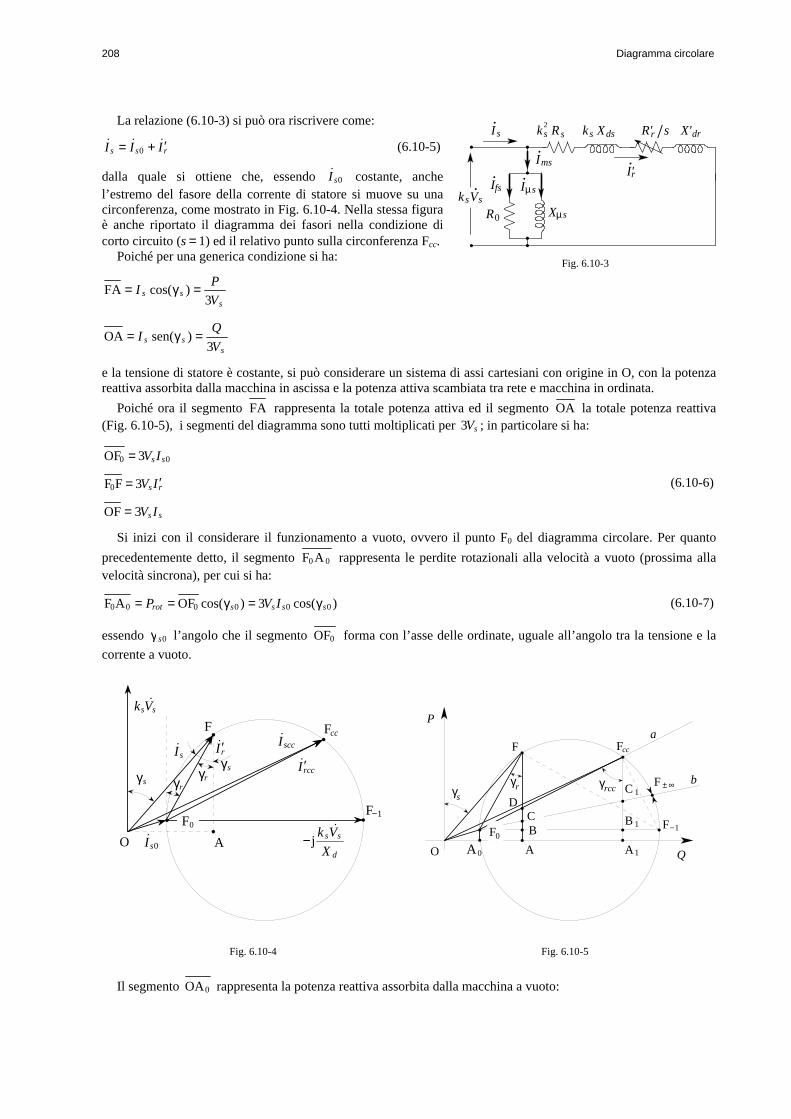
208 Diagramma circolare
La relazione (6.10-3) si può ora riscrivere come:
rss III ′+= &&&0 (6.10-5)
dalla quale si ottiene che, essendo 0sI& costante, anche l’estremo del fasore della corrente di statore si muove su una circonferenza, come mostrato in Fig. 6.10-4. Nella stessa figura è anche riportato il diagramma dei fasori nella condizione di corto circuito (s = 1) ed il relativo punto sulla circonferenza Fcc.
Poiché per una generica condizione si ha:
sss V
PI3
)cos(FA =γ=
sss V
QI3
)sen(OA =γ=
e la tensione di statore è costante, si può considerare un sistema di assi cartesiani con origine in O, con la potenza reattiva assorbita dalla macchina in ascissa e la potenza attiva scambiata tra rete e macchina in ordinata.
Poiché ora il segmento FA rappresenta la totale potenza attiva ed il segmento OA la totale potenza reattiva (Fig. 6.10-5), i segmenti del diagramma sono tutti moltiplicati per sV3 ; in particolare si ha:
00 3OF ss IV=
rs IV ′= 3FF0
ss IV3OF =
(6.10-6)
Si inizi con il considerare il funzionamento a vuoto, ovvero il punto F0 del diagramma circolare. Per quanto precedentemente detto, il segmento 00 AF rappresenta le perdite rotazionali alla velocità a vuoto (prossima alla velocità sincrona), per cui si ha:
)cos(3)cos(OFAF 000000 ssssrot IVP γ=γ== (6.10-7)
essendo 0sγ l’angolo che il segmento 0OF forma con l’asse delle ordinate, uguale all’angolo tra la tensione e la corrente a vuoto.
k
F!
1−F!
!
!
F
sγ
0FO A
!
ssVk &
sI& sccI&
rccI ′&rI ′&
d
ss
XV&j−0sI&
sγrγ
rγ
cc
Q
P
!
1−F
∞±F!
!
!
!
F
sγ!
!
!
A
B
C
0FO
1
1
1
!
!
AB
!
!
CD
!
A0
rγ rccγ
a
b
Fcc
Fig. 6.10-4 Fig. 6.10-5
Il segmento 0OA rappresenta la potenza reattiva assorbita dalla macchina a vuoto:
R0 X
Ifs!
I!
Ims!
sµ
sµ
Rs Xds drX'
I'r!
R'r /s
ksV!
s
ks ks2
!
!
!
!
!!
I s!
Fig. 6.10-3

MACCHINE ASINCRONE 209
)sen(3)sen(OFOA 000000 ssss IVQ γ=γ== (6.10-8)
Si consideri ora il punto di funzionamento Fcc rappresentativo del funzionamento a rotore fermo (corto circuito). Il segmento 1AFcc rappresenta la potenza attiva assorbita e quindi, essendo la potenza meccanica nulla, dissipata dalla macchina:
)cos(3)cos(OFAF 1 sccsccsscccccc IV γ=γ= (6.10-9)
Indicando con B1 il punto di intersezione tra 1AFcc e 1-0 FF si trova che 11AB è uguale alle perdite rotazionali a vuoto. A rotore fermo le perdite di attrito e ventilazione sono nulle. Sono tuttavia presenti le perdite nel ferro di rotore, che sono invece nulle a vuoto. Si può assumere quindi che le perdite rotazionali siano costanti al variare della velocità. Con tale assunzione, il segmento 1BFcc rappresenta le perdite negli avvolgimenti; si ha infatti:
)cos(3)cos(FFBF 0,,1 rccrccsrccccrcccuscccucc IVPP γ′=γ=+= (6.10-10)
Poiché si ha: 22
, 3 rccssscccu IRkP ′=
2, 3 rccrrcccu IRP ′′=
conoscendo i valori della resistenza di statore e di quella di rotore è possibile dividere il segmento 1BFcc con un punto C1 tale che:
22,11 3BC rccssscccu IRkP ′==
2′′3== rccrrcc,cucc IRP1CF
In una generica condizione di funzionamento rappresentata dal punto F si ha:
)cos(3)cos(OFFA ssss IVP γ=γ==
)sen(3)sen(OFOA ssss IVQ γ=γ==
)cos(3)cos(OFBA 0000 ssssrot IVP γ=γ==
Si considerino le rette a e b, passanti rispettivamente per i punti F0 e Fcc, F0 e C1; esse intersecano il segmento FA nei punti D e C. Il segmento FB , pari alla potenza assorbita dalla macchina meno le perdite rotazionali, risulta quindi diviso in diverse parti che devono rappresentare altrettante potenze.
In primo luogo si dimostra che il segmento DB è uguale alla potenza dissipata negli avvolgimenti.
Considerando infatti i due triangoli simili 0FBD∆
e 01 FBF∆
cc si ottiene:
10
0
1 BFBF
BFDB =cc
ovvero:
22
10
0,
10
011
10
0 )(3BFBF
BFBFBF
BFBFDB rccrsscccu IRRkP ′′+=== (6.10-11)
Poiché si ha:
)sen(3)sen(FFBF 00 rrsr IV γ′=γ=
)sen(3)sen(FFBF 010 rccrccsrcccc IV γ′=γ=
il rapporto tra i due segmenti vale:

210 Diagramma circolare
)sen()sen(
BFBF
10
0
rccrcc
rr
II
γ′γ′
= (6.10-12)
Dai triangoli 1-0 FFF∆
e 1-0 FFF cc∆
si ottiene inoltre:
1-01-0
0
FF3
FFFF)sen( rs
rIV ′
==γ
1-01-0
0
FF3
FFFF)sen( rccscc
rccIV ′
==γ
Il rapporto 10
0
BFBF vale pertanto:
2
2
10
0
BFBF
rcc
r
II′′
= (6.10-13)
Sostituendo infine la (6.10-13) nella (6.10-11), si ha:
currssrccrssrcc
rrccrss PIRRkIRRk
IIIRRk =′′+=′′+′′
=′′+= 22222
222
10
0 )(3)(3)(3BFBFDB (6.10-14)
ovvero il segmento DB è uguale alla potenza dissipata negli avvolgimenti nella generica condizione operativa considerata.
Si dimostra inoltre che il punto C divide il segmento DB in due parti che rappresentano le perdite negli avvolgimenti di statore e quelle negli avvolgimenti di rotore. Considerando infatti le due rette parallele FA e FccA1 tagliate dalle rette a, b e F0Fcc, si ottiene:
1
11
BFBC
DBCB
cc=
scurssrrssrccrss
rccsscu
cccu
scccu
cc
PIRkIRRkIRRk
IRkPPP
,2222
22
22
,
,
1
11 3)(3)(3
3DBBFBCCB =′=′′+
′′+′
=== (6.10-15)
rcurr PIR ,23DC =′′= (6.10-16)
Poiché il segmento
prcuscurot PPPP =++=++= ,,DCCBBADA
rappresenta tutta la potenza dissipata, il segmento FD deve necessariamente rappresentare la potenza meccanica. Si ha infatti:
mp PPP =−=−= DAFAFD
Il segmento
)(CBBAFAFC , pCPPPP srscurot ω⋅==−−=−−= (6.10-17)
rappresenta la potenza sincrona ed è quindi proporzionale alla coppia elettromagnetica. Sulla base di quanto dimostrato si può definire la retta a come retta della potenza meccanica, in quanto la
distanza verticale di un qualsiasi punto della circonferenza da essa rappresenta tale potenza. Se il punto si trova al di sopra della retta a la potenza meccanica è positiva e quindi è erogata , se il punto è al di sotto della retta a la potenza meccanica è negativa e quindi è assorbita dalla macchina. Tutti i punti al di sopra della retta a sono relativi al funzionamento da motore e sono infatti caratterizzati da valori di scorrimento compresi tra 0 e 1.
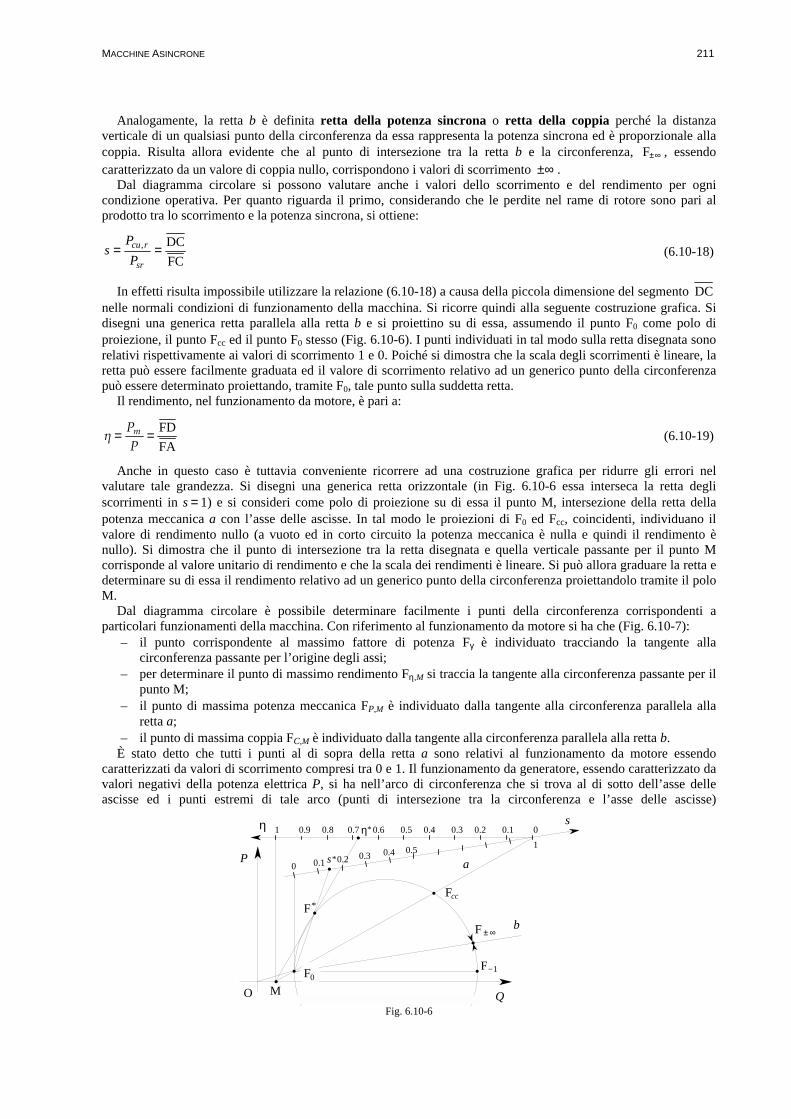
MACCHINE ASINCRONE 211
Analogamente, la retta b è definita retta della potenza sincrona o retta della coppia perché la distanza verticale di un qualsiasi punto della circonferenza da essa rappresenta la potenza sincrona ed è proporzionale alla coppia. Risulta allora evidente che al punto di intersezione tra la retta b e la circonferenza, ∞±F , essendo caratterizzato da un valore di coppia nullo, corrispondono i valori di scorrimento ±∞ .
Dal diagramma circolare si possono valutare anche i valori dello scorrimento e del rendimento per ogni condizione operativa. Per quanto riguarda il primo, considerando che le perdite nel rame di rotore sono pari al prodotto tra lo scorrimento e la potenza sincrona, si ottiene:
FCDC, ==
sr
rcu
PP
s (6.10-18)
In effetti risulta impossibile utilizzare la relazione (6.10-18) a causa della piccola dimensione del segmento DC nelle normali condizioni di funzionamento della macchina. Si ricorre quindi alla seguente costruzione grafica. Si disegni una generica retta parallela alla retta b e si proiettino su di essa, assumendo il punto F0 come polo di proiezione, il punto Fcc ed il punto F0 stesso (Fig. 6.10-6). I punti individuati in tal modo sulla retta disegnata sono relativi rispettivamente ai valori di scorrimento 1 e 0. Poiché si dimostra che la scala degli scorrimenti è lineare, la retta può essere facilmente graduata ed il valore di scorrimento relativo ad un generico punto della circonferenza può essere determinato proiettando, tramite F0, tale punto sulla suddetta retta.
Il rendimento, nel funzionamento da motore, è pari a:
FAFD==
PPη m (6.10-19)
Anche in questo caso è tuttavia conveniente ricorrere ad una costruzione grafica per ridurre gli errori nel valutare tale grandezza. Si disegni una generica retta orizzontale (in Fig. 6.10-6 essa interseca la retta degli scorrimenti in s = 1) e si consideri come polo di proiezione su di essa il punto M, intersezione della retta della potenza meccanica a con l’asse delle ascisse. In tal modo le proiezioni di F0 ed Fcc, coincidenti, individuano il valore di rendimento nullo (a vuoto ed in corto circuito la potenza meccanica è nulla e quindi il rendimento è nullo). Si dimostra che il punto di intersezione tra la retta disegnata e quella verticale passante per il punto M corrisponde al valore unitario di rendimento e che la scala dei rendimenti è lineare. Si può allora graduare la retta e determinare su di essa il rendimento relativo ad un generico punto della circonferenza proiettandolo tramite il polo M.
Dal diagramma circolare è possibile determinare facilmente i punti della circonferenza corrispondenti a particolari funzionamenti della macchina. Con riferimento al funzionamento da motore si ha che (Fig. 6.10-7):
– il punto corrispondente al massimo fattore di potenza Fγ è individuato tracciando la tangente alla circonferenza passante per l’origine degli assi;
– per determinare il punto di massimo rendimento Fη,M si traccia la tangente alla circonferenza passante per il punto M;
– il punto di massima potenza meccanica FP,M è individuato dalla tangente alla circonferenza parallela alla retta a;
– il punto di massima coppia FC,M è individuato dalla tangente alla circonferenza parallela alla retta b. È stato detto che tutti i punti al di sopra della retta a sono relativi al funzionamento da motore essendo
caratterizzati da valori di scorrimento compresi tra 0 e 1. Il funzionamento da generatore, essendo caratterizzato da valori negativi della potenza elettrica P, si ha nell’arco di circonferenza che si trova al di sotto dell’asse delle ascisse ed i punti estremi di tale arco (punti di intersezione tra la circonferenza e l’asse delle ascisse)
Q
P
!
1−F
∞±F!
!
!
!0F
O
a
b
sη 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
0 0.1 0.2 0.3 0.4 0.5 1
Fcc
F
!
!
*
η*
s*
M!
Fig. 6.10-6

212 Diagramma circolare
corrispondono ai valori di scorrimento s′ ed s″ già definiti nel paragrafo 5.6. Nel restante arco di circonferenza 1FFF −∞±
)cc si ha il funzionamento da freno. Considerando infatti un punto F di
tale arco (Fig. 6.10-8) si ha che il segmento DF rappresenta la potenza meccanica assorbita dalla macchina (il punto F si trova al di sotto del punto D), il segmento FA rappresenta la potenza elettrica assorbita ed il segmento DA le totali perdite, uguali alla somma delle due potenze assorbite. È inoltre immediato verificare che la frenatura più efficace si ha nell’intorno del punto F−1, in quanto la potenza elettrica è piccola e quella meccanica è molto elevata; le perdite vengono quindi alimentate quasi esclusivamente dalla potenza meccanica. Man mano che il punto di funzionamento si avvicina a Fcc la macchina dissipa sempre più potenza elettrica e diminuisce l’azione frenante (decresce la potenza meccanica assorbita).
Q
P
!
1−F
∞±F!
!
!
!
F
s,mγ
0FO
a
b
!
!
b'a'
Pm,MCMγ
FP,MFC,M
Fcc
ηη 0!
M!
M
!Fη ,M
Q
P
!
1−F
∞±F!
!
!
!
F
!
!
A
B
C
0F
O
! Da
b
Fcc
!
Fig. 6.10-7 Fig. 6.10-8
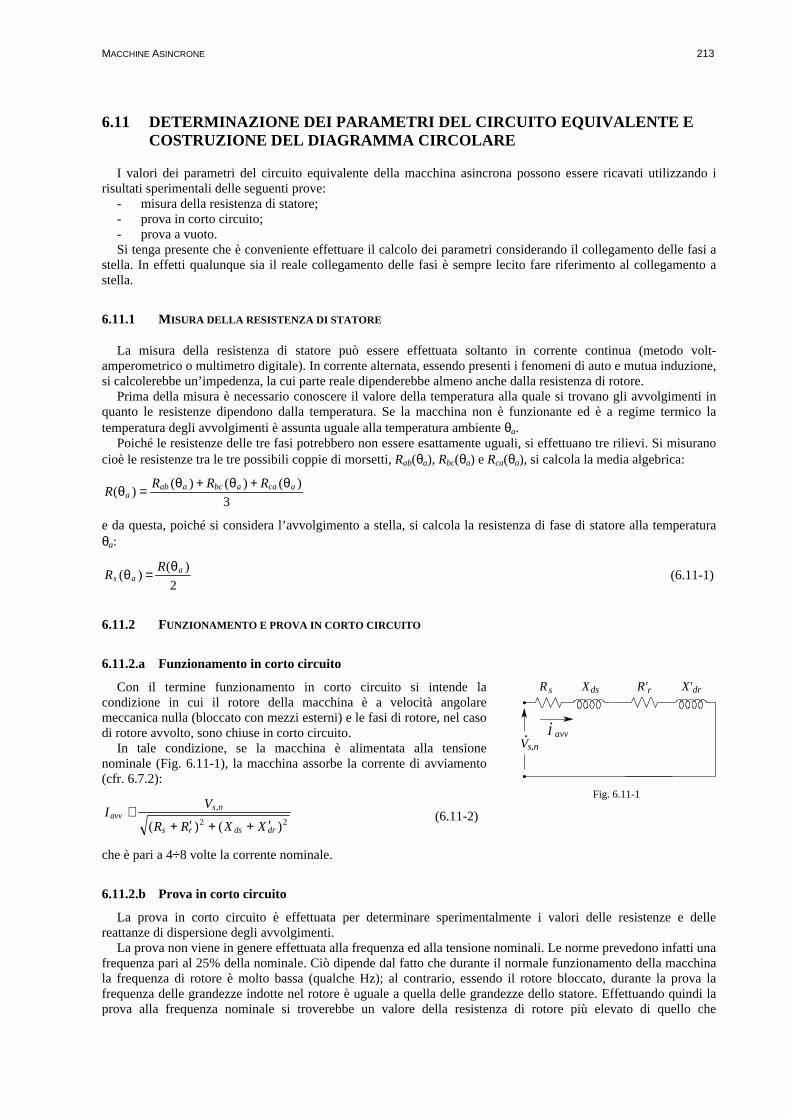
MACCHINE ASINCRONE 213
6.11 DETERMINAZIONE DEI PARAMETRI DEL CIRCUITO EQUIVALENTE E COSTRUZIONE DEL DIAGRAMMA CIRCOLARE
I valori dei parametri del circuito equivalente della macchina asincrona possono essere ricavati utilizzando i risultati sperimentali delle seguenti prove:
- misura della resistenza di statore; - prova in corto circuito; - prova a vuoto. Si tenga presente che è conveniente effettuare il calcolo dei parametri considerando il collegamento delle fasi a
stella. In effetti qualunque sia il reale collegamento delle fasi è sempre lecito fare riferimento al collegamento a stella.
6.11.1 MISURA DELLA RESISTENZA DI STATORE
La misura della resistenza di statore può essere effettuata soltanto in corrente continua (metodo volt-amperometrico o multimetro digitale). In corrente alternata, essendo presenti i fenomeni di auto e mutua induzione, si calcolerebbe un’impedenza, la cui parte reale dipenderebbe almeno anche dalla resistenza di rotore.
Prima della misura è necessario conoscere il valore della temperatura alla quale si trovano gli avvolgimenti in quanto le resistenze dipendono dalla temperatura. Se la macchina non è funzionante ed è a regime termico la temperatura degli avvolgimenti è assunta uguale alla temperatura ambiente θa.
Poiché le resistenze delle tre fasi potrebbero non essere esattamente uguali, si effettuano tre rilievi. Si misurano cioè le resistenze tra le tre possibili coppie di morsetti, Rab(θa), Rbc(θa) e Rca(θa), si calcola la media algebrica:
3)()()()( acaabcaab
aRRRR θ+θ+θ=θ
e da questa, poiché si considera l’avvolgimento a stella, si calcola la resistenza di fase di statore alla temperatura θa:
2)()( a
asRR θ=θ (6.11-1)
6.11.2 FUNZIONAMENTO E PROVA IN CORTO CIRCUITO
6.11.2.a Funzionamento in corto circuito
Con il termine funzionamento in corto circuito si intende la condizione in cui il rotore della macchina è a velocità angolare meccanica nulla (bloccato con mezzi esterni) e le fasi di rotore, nel caso di rotore avvolto, sono chiuse in corto circuito.
In tale condizione, se la macchina è alimentata alla tensione nominale (Fig. 6.11-1), la macchina assorbe la corrente di avviamento (cfr. 6.7.2):
22
,
)()( drdsrs
nsavv
XXRR
VI′++′+
≅ (6.11-2)
che è pari a 4÷8 volte la corrente nominale.
6.11.2.b Prova in corto circuito
La prova in corto circuito è effettuata per determinare sperimentalmente i valori delle resistenze e delle reattanze di dispersione degli avvolgimenti.
La prova non viene in genere effettuata alla frequenza ed alla tensione nominali. Le norme prevedono infatti una frequenza pari al 25% della nominale. Ciò dipende dal fatto che durante il normale funzionamento della macchina la frequenza di rotore è molto bassa (qualche Hz); al contrario, essendo il rotore bloccato, durante la prova la frequenza delle grandezze indotte nel rotore è uguale a quella delle grandezze dello statore. Effettuando quindi la prova alla frequenza nominale si troverebbe un valore della resistenza di rotore più elevato di quello che
Rs Xds
Vs,n!
I!
drX'R'r!
!
avv
Fig. 6.11-1
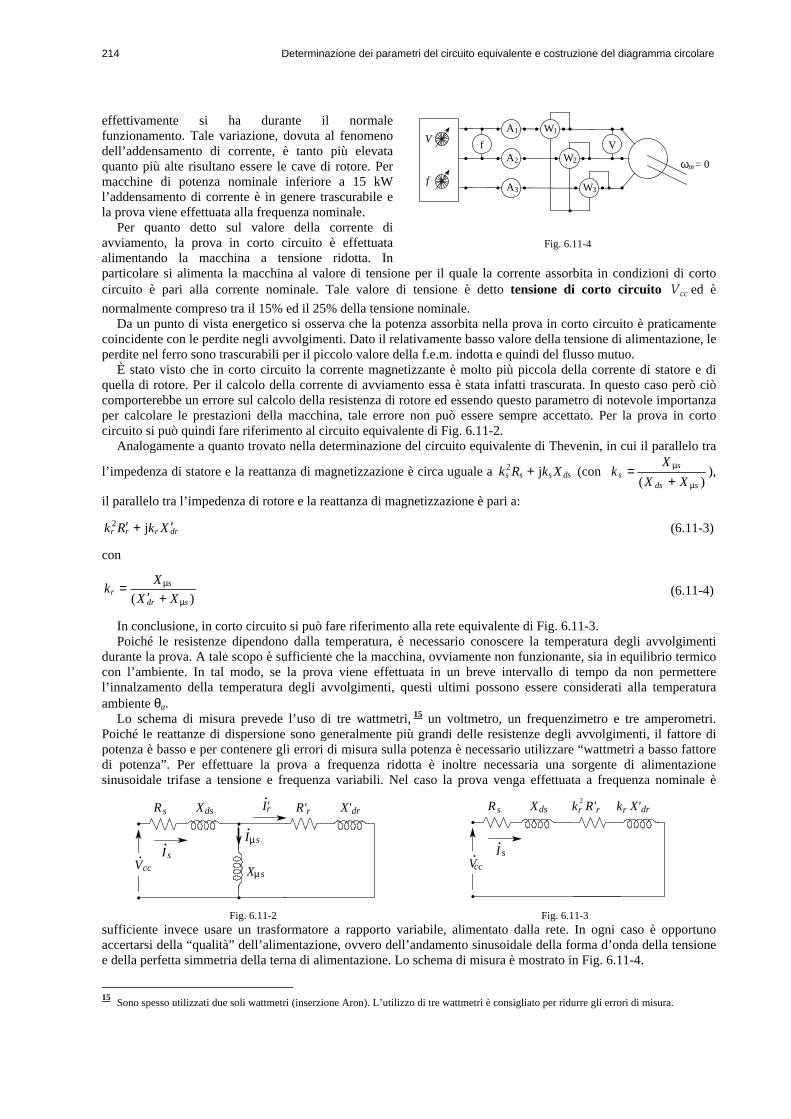
214 Determinazione dei parametri del circuito equivalente e costruzione del diagramma circolare
effettivamente si ha durante il normale funzionamento. Tale variazione, dovuta al fenomeno dell’addensamento di corrente, è tanto più elevata quanto più alte risultano essere le cave di rotore. Per macchine di potenza nominale inferiore a 15 kW l’addensamento di corrente è in genere trascurabile e la prova viene effettuata alla frequenza nominale.
Per quanto detto sul valore della corrente di avviamento, la prova in corto circuito è effettuata alimentando la macchina a tensione ridotta. In particolare si alimenta la macchina al valore di tensione per il quale la corrente assorbita in condizioni di corto circuito è pari alla corrente nominale. Tale valore di tensione è detto tensione di corto circuito ccV ed è normalmente compreso tra il 15% ed il 25% della tensione nominale.
Da un punto di vista energetico si osserva che la potenza assorbita nella prova in corto circuito è praticamente coincidente con le perdite negli avvolgimenti. Dato il relativamente basso valore della tensione di alimentazione, le perdite nel ferro sono trascurabili per il piccolo valore della f.e.m. indotta e quindi del flusso mutuo.
È stato visto che in corto circuito la corrente magnetizzante è molto più piccola della corrente di statore e di quella di rotore. Per il calcolo della corrente di avviamento essa è stata infatti trascurata. In questo caso però ciò comporterebbe un errore sul calcolo della resistenza di rotore ed essendo questo parametro di notevole importanza per calcolare le prestazioni della macchina, tale errore non può essere sempre accettato. Per la prova in corto circuito si può quindi fare riferimento al circuito equivalente di Fig. 6.11-2.
Analogamente a quanto trovato nella determinazione del circuito equivalente di Thevenin, in cui il parallelo tra
l’impedenza di statore e la reattanza di magnetizzazione è circa uguale a dssss XkRk j2 + (con )( sds
ss XX
Xk
µ
µ
+= ),
il parallelo tra l’impedenza di rotore e la reattanza di magnetizzazione è pari a:
drrrr XkRk ′+′ j2 (6.11-3)
con
)( sdr
sr XX
Xkµ
µ
+′= (6.11-4)
In conclusione, in corto circuito si può fare riferimento alla rete equivalente di Fig. 6.11-3. Poiché le resistenze dipendono dalla temperatura, è necessario conoscere la temperatura degli avvolgimenti
durante la prova. A tale scopo è sufficiente che la macchina, ovviamente non funzionante, sia in equilibrio termico con l’ambiente. In tal modo, se la prova viene effettuata in un breve intervallo di tempo da non permettere l’innalzamento della temperatura degli avvolgimenti, questi ultimi possono essere considerati alla temperatura ambiente θa.
Lo schema di misura prevede l’uso di tre wattmetri, 15 un voltmetro, un frequenzimetro e tre amperometri. Poiché le reattanze di dispersione sono generalmente più grandi delle resistenze degli avvolgimenti, il fattore di potenza è basso e per contenere gli errori di misura sulla potenza è necessario utilizzare “wattmetri a basso fattore di potenza”. Per effettuare la prova a frequenza ridotta è inoltre necessaria una sorgente di alimentazione sinusoidale trifase a tensione e frequenza variabili. Nel caso la prova venga effettuata a frequenza nominale è
sufficiente invece usare un trasformatore a rapporto variabile, alimentato dalla rete. In ogni caso è opportuno accertarsi della “qualità” dell’alimentazione, ovvero dell’andamento sinusoidale della forma d’onda della tensione e della perfetta simmetria della terna di alimentazione. Lo schema di misura è mostrato in Fig. 6.11-4.
15 Sono spesso utilizzati due soli wattmetri (inserzione Aron). L’utilizzo di tre wattmetri è consigliato per ridurre gli errori di misura.
Rs Xds
Vcc!
I s!
drX'I'r!
R'r
X
I!
sµ
sµ
!
! !
!
Rs Xds
Vcc!
I!
drX'R'r!
!
kr2 kr
s
Fig. 6.11-2 Fig. 6.11-3
!
!
!! ! ! ! !
!
A WV
! ! !
! !
!
1
A2
A3
1
!ωm= 0
V
f
!
f!
!
! W2 !
! W3 !
!
!
!
Fig. 6.11-4

MACCHINE ASINCRONE 215
Durante la prova si misurano:
– la potenza elettrica assorbita dalla macchina Pcc;
– la tensione concatenata di alimentazione √3Vcc;
– la corrente assorbita dalla macchina Is (prossima a quella nominale). Poiché è stato detto che le perdite nel ferro sono trascurabili, si ha:
[ ] 222 )()()(3 sarrassacccc IRkRIRP θ′+θ=θ= (6.11-5)
22 3)()()(
s
ccarrasacc
IPRkRR =θ′+θ=θ (6.11-6)
Poiché la resistenza di statore )( asR θ è nota, si ottiene:
)()()(2asaccarr RRRk θ−θ=θ′ (6.11-7)
Dalla rete equivalente di Fig. 6.11-3 risulta inoltre:
s
ccpdrrpdsarraspccaccapcc I
VfXkfXRkRfXRfZ =′++θ′+θ=+θ=θ 22222 ))()(())()(()()(),( (6.11-8)
2
2
222 3)(),()()()(
−
=θ−θ=′+=s
cc
s
ccaccapccpdrrpdspcc
IP
IVRfZfXkfXfX (6.11-9)
essendo fp la frequenza alla quale è effettuata la prova di corto circuito.
Si riportano infine le reattanze di dispersione alla frequenza nominale della macchina nf :
)()( pnpccdrrdscc fffXXkXX ⋅=′+= (6.11-10)
La suddivisione della reattanza di dispersione ccX nelle parti spettanti allo statore ed al rotore può essere fatta soltanto sulla base di dati ottenibili con prove non sempre effettuabili in normali laboratori di collaudo. Le norme IEEE prevedono di dividere la reattanza di dispersione in base alla classe del motore secondo la Tab. 6.3. Dato che la suddivisione è empirica, risulta ovvio che non ha senso considerare il fattore kr (di poco inferiore all’unità) che moltiplica la reattanza di rotore ed è quindi possibile porre:
drdscc XXX ′+= (6.11-11)
Dalla Tab. 6.3 è quindi possibile determinare i valori di dsX e drX ′ . Tramite la misura della resistenza di statore e la prova in corto circuito sono stati calcolati quindi i seguenti
valori: )( asR θ , )(2arr Rk θ′ , dsX e drX ′ .
Classe motore ccds XX / ccdr XX /′ Rotore avvolto 0,5 0,5
A 0,5 0,5 B 0,4 0,6 C 0,3 0,7 D 0,5 0,5
Tab. 6.3

216 Determinazione dei parametri del circuito equivalente e costruzione del diagramma circolare
6.11.3 FUNZIONAMENTO E PROVA A VUOTO
6.11.3.a Funzionamento a vuoto
Con il termine funzionamento a vuoto del motore asincrono si intende la condizione operativa in cui la macchina, alimentata alla tensione nominale, non è collegata ad alcun carico meccanico, ovvero la coppia resistente è nulla. In tali condizioni la velocità meccanica è prossima a quella sincrona e lo scorrimento, s0, è molto piccolo. La corrente di rotore è anch’essa molto piccola ed è in fase con la f.e.m. indotta a vuoto in quanto la reattanza di dispersione del rotore è trascurabile rispetto al valore di resistenza R′r / s0 (Fig. 6.11-5 e Fig. 6.11-6). Il piccolo valore della corrente di rotore è quello necessario ad ottenere un valore di coppia uguale alla coppia di attrito e ventilazione. La resistenza ottenuta dal parallelo tra la resistenza Rfe e la resistenza R′r / s0 ed indicata con R0 in Fig. 6.11-7 è quella che tiene conto delle perdite rotazionali (Prot = Pfe + Pa,v).
La corrente assorbita dalla macchina è pari a: 16
ms
s
s
ssR
nss
ZE
XE
REII
ZV
I s &
&&&&&
&
&& 00
0
00
0
,0 j0 =+=+==
µµ (6.11-12)
essendo 0Z& l’impedenza a vuoto della macchina:
msdsstottot ZXRXRZ && ++=+= )j(j 000 (6.11-13)
con
)j//()(j 0 smmms XRXRZ µ=+=& (6.11-14)
Lo sfasamento tra la tensione di alimentazione e la corrente assorbita a vuoto, ovvero l’angolo γ0 (Fig. 6.11-6) è compreso generalmente tra i 70° e gli 80°.
È immediato verificare che la rete equivalente corrispondente al funzionamento a vuoto è del tutto identica a quella di un trasformatore funzionante a vuoto.
C’è da sottolineare, però, una notevole differenza dal punto di vista quantitativo. La presenza di un traferro relativamente grande fa sì che in una macchina asincrona la corrente a vuoto sia compresa tra il 25% e il 50% della corrente nominale 17, a differenza di quanto si riscontra nei trasformatori per i quali la corrente a vuoto è compresa tra 0,5% e 5% della corrente nominale. Inoltre, dato che la resistenza dell’avvolgimento è relativamente più grande che nei trasformatori, la caduta di tensione nell’avvolgimento statorico di una macchina asincrona funzionante a vuoto costituisce il 2÷5% della tensione nominale della macchina, mentre nei trasformatori in funzionamento a vuoto essa generalmente non supera lo 0,1÷0,4% della tensione nominale. A causa dei relativamente elevati valori della corrente a vuoto e della resistenza di statore, le perdite nell’avvolgimento di statore a vuoto non possono essere trascurate, come viene fatto normalmente nei trasformatori. La potenza assorbita a vuoto è quindi uguale alla somma delle perdite nell’avvolgimento di statore e delle perdite rotazionali:
rotss PIRP += 200 3 (6.11-15)
Rs Xds
Vs,n! Es
!I s!
I'r!
R'r s/
Rfe X s
Ifs!
I!
Ims!
sµ
µ
00
00
0
00
′
REs
!
Φm!
Is
Is!
s
Is!
XdsjVs,n!
Ims!
0
0
!
0
0
0
0
0rI&γ0
Rs Xds
Es!I s
!
R X s
IR!
I!
I s!
sµ
µ
00
0
00
0
Z!
ms}Vs,n!
Fig. 6.11-5 Fig. 6.11-6 Fig. 6.11-7
16 sX µ è il particolare valore che sX µ
( assume a vuoto con tensione nominale ed è pertanto una costante. Per tale motivo l’impedenza di
magnetizzazione e l’impedenza a vuoto sono costanti in quanto sono relative ad una determinata condizione operativa. 17 In macchine molto piccole la corrente a vuoto può arrivare a valori anche molto più elevati del 50% della corrente nominale.

MACCHINE ASINCRONE 217
6.11.3.b Prova a vuoto
Lo schema di misura prevede l’uso di tre wattmetri (cfr. nota 15), un voltmetro e tre amperometri. Poiché nel funzionamento a vuoto il fattore di potenza è basso, per contenere gli errori di misura sulla potenza è necessario utilizzare “wattmetri a basso fattore di potenza”. È inoltre necessario un trasformatore a rapporto variabile per alimentare la macchina in prova con diversi valori di tensione. Se non viene usata le rete come sorgente è necessario inoltre misurare la frequenza dell’alimentazione per accertarsi che corrisponda alla frequenza nominale della macchina in prova. In ogni caso è opportuno accertarsi della “qualità” dell’alimentazione ovvero dell’andamento sinusoidale della forma d’onda delle tensioni e della perfetta simmetria della terna di alimentazione. Lo schema di misura è mostrato in Fig. 6.11-8.
Per ridurre le incertezze di misura di tipo casuale vengono effettuate diverse misure della potenza attiva assorbita, delle correnti assorbite e della tensione di alimentazione per valori in p.u. di quest’ultima grandezza che vanno da 0,5 a circa 1,2. In tal modo si determinano le funzioni I = I(V) e P = P(V) con il metodo di interpolazione per minimi quadrati e, tramite esse, si calcolano i valori della corrente a vuoto Is0 e della potenza assorbita P0 in corrispondenza del valore nominale della tensione (Fig. 6.11-9). Poiché la potenza dissipata sulla resistenza di statore non può essere trascurata, occorre misurare il valore di tale resistenza immediatamente al termine delle misure. Il valore misurato è considerato valido per tutti i punti di misura se la temperatura della macchina non varia durante il tempo della prova. Affinché la temperatura rimanga costante per tutti i punti di misura è necessario che la macchina raggiunga il regime termico corrispondente al funzionamento a vuoto prima di effettuare i rilievi.
Durante le prove si misurano:
- la potenza elettrica assorbita dalla macchina P;
- la tensione concatenata di alimentazione √3V;
- la corrente assorbita dalla macchina I. Come valore di corrente I si considera la media aritmetica dei tre valori misurati sulle tre fasi. La potenza attiva
assorbita P è pari alla somma dei valori misurati con i tre wattmetri. A partire dai valori misurati, con la tecnica poc’anzi esposta, si calcolano i valori della corrente a vuoto Is0 e
della potenza assorbita P0 in corrispondenza del valore nominale della tensione Vn, dai quali è possibile determinare gli ulteriori parametri della rete equivalente.
In primo luogo si calcola l’impedenza a vuoto alla temperatura di prova θp, la sua reale e la sua parte immaginaria:
0
2220
200 )())(()()(
s
nmdsmpstotptotp I
VXXRRXRZ =+++θ=+θ=θ (6.11-16)
20
00
3/)()(s
mpsptotI
PRRR =+θ=θ (6.11-17)
20
200 )()( ptotpmdstot RZXXX θ−θ=+= (6.11-18)
Indicando quindi con )( psR θ il valore misurato della resistenza di statore alla temperatura di prova, si calcola la parte reale dell’impedenza di magnetizzazione:
)()(0 psptotm RRR θ−θ= (6.11-19)
!
!
! !A
RETE ! ! !
! !
1
A2
A3
Cr = 0
!! ! !
!
WV!
1
!
!
! W2 !
! W3 !
!
!
!O V
I,P
Vn
I0
P0!
! !
!!
! xxx
xx
x
Fig. 6.11-8 Fig. 6.11-9

218 Determinazione dei parametri del circuito equivalente e costruzione del diagramma circolare
Essendo nota la reattanza di dispersione dello statore dalla prova in corto circuito, è inoltre possibile calcolare la parte immaginaria dell’impedenza di magnetizzazione:
dstotm XXX −= 0 (6.11-20)
Rimane infine da calcolare la resistenza rotorica riportata allo statore a partire dal valore )(2arr Rk θ′ , noto dalla
prova in corto circuito. Dai valori dei parametri serie dell’impedenza di magnetizzazione (Rm e Xm) si calcolano i parametri della
schematizzazione in parallelo:
+=
+=
µm
mms
m
mm
XXRX
RXRR
22
22
0
(6.11-21)
Essendo noto il valore della reattanza di dispersione del rotore (dalla prova in corto circuito), si calcola il rapporto:
)( sdr
sr XX
Xkµ
µ
+′= (6.11-22)
ed il valore della resistenza rotorica riportata allo statore alla temperatura ambiente della prova in corto circuito:
2
2 )]([)(r
arrar
kRkR θ′
=θ′ (6.11-23)
6.11.4 COSTRUZIONE DEL DIAGRAMMA CIRCOLARE
Per la costruzione del diagramma circolare, valido per la tensione nominale, è necessaria la conoscenza dei valori delle seguenti grandezze:
– potenza attiva e potenza reattiva assorbite a vuoto alla tensione nominale (P0, Q0);
– potenza attiva e potenza reattiva assorbite a rotore bloccato ed in corto circuito alla tensione nominale;
– resistenze sR e rR′ e rapporto ks. Le potenze assorbite a vuoto sono quelle determinate tramite la prova a vuoto. Per quanto riguarda le potenze
assorbite in corto circuito bisogna tener presente che quelle determinate con la prova in corto circuito sono relative alla tensione di corto circuito e non alla tensione nominale. Il riporto di tali potenze alla tensione nominale può essere fatto sulla base delle seguenti considerazioni:
– le resistenze sR e rR′ non dipendono dalla tensione di alimentazione;
– le reattanze di dispersione dsX e drX ′ sono relative a flussi i cui circuiti magnetici non sono saturabili e sono pertanto costanti al variare della corrente;
– la reattanza sX µ rimane praticamente costante. È stato infatti visto che in corto circuito il flusso mutuo è notevolmente inferiore rispetto a quello che si ha nel normale funzionamento. In tali condizioni quindi il circuito magnetico non raggiunge la saturazione neanche alla tensione nominale e la reattanza di magnetizzazione è pari alla reattanza del solo traferro (costante).
Si può allora ritenere che in corto circuito l’impedenza della macchina rimanga praticamente costante, almeno
fino alla tensione di alimentazione nominale, e che la corrente aumenti linearmente con la tensione. Poiché le potenze assorbite dipendono dal quadrato della corrente, per il loro riporto alla tensione nominale si ottiene 18:
18 Nel caso in cui la prova in corto circuito sia effettuata a frequenza ridotta è necessario effettuare anche il riporto della potenza reattiva alla
frequenza nominale.

MACCHINE ASINCRONE 219
2
)()(
⋅=cc
nccccncc V
VVPVP (6.11-24)
2
)()(
⋅=cc
nccccncc V
VVQVQ (6.11-25)
Ai fini della costruzione del diagramma circolare sono ora noti i punti F0(Q0,P0) e Fcc(Qcc(Vn),Pcc(Vn)) ed è noto che il centro della corconferenza si trova sulla retta di equazione P = P0. Il centro della circonferenza è allora individuato come punto di intersezione tra l’asse della corda ccFF0 e la retta P = P0. La circonferenza risulta quindi definita dal centro C e dai due suoi punti F0 e Fcc (Fig. 6.11-10).
La separazione delle perdite degli avvolgimenti è fatta dividendo il segmento 0)(BF PVP ncccc −= sulla base della seguente proporzione:
rss
ss
cc RRkRk
′+= 2
2
BFDB (6.11-26)
dalla quale si ottiene:
)P)V(P(RRk
RkRRk
Rkncc
rss
sscc
rss
ss02
2
2
2−⋅
′+=
′+= BFDB (6.11-27)
Individuato il punto D, si può tracciare la retta della potenza sincrona o della coppia b, che interseca la circonferenza nel punto di scorrimento ±∞.
Q
P
!
1−F
∞±F!
!!
!
!
!
A
BC0F
O
a
b
Fcc
!
D
Fig. 6.11-10
220 Determinazione dei parametri del circuito equivalente e costruzione del diagramma circolare
PPPaaagggiiinnnaaa bbbiiiaaannncccaaa





























