Embed Size (px)
Citation preview
42 Oilfield Review
Changing the Way We Drill
Walt AldredJim BelaskieRustam IsangulovCambridge, England
Barry CrockettBobby EdmondsonCameron, Texas, USA
Fred FlorenceM/D TotcoCedar Park, Texas
Sundaram SrinivasanSugar Land, Texas
For help in preparation of this article, thanks to Emma JaneBloor and Andy Hendricks, Sugar Land, Texas. We alsothank Joe Fuentes and Wade Wiley, Cameron, Texas, for theircontribution to the remote automated drilling project.PERFORM, PowerDrive, PowerDrive Xceed, PowerDriveXtra and PowerPulse are marks of Schlumberger. IronRoughneck is a mark of Varco LP. VisiWear is a mark of VisiWear Corporation.
Automated drilling systems decrease risk to rig personnel, reduce costs and
improve efficiency. Operating these systems remotely will be the next progression
in a maturing oil and gas industry, allowing operators to utilize their most qualified
experts at any location to monitor and control drilling operations.
On November 19, 2004, a remote command sentacross the Atlantic Ocean from Cambridge,England, successfully changed a drilling opera-tion in Cameron, Texas, and in the process, mayhave changed the way wells are drilled in thefuture. This achievement was not a stand-aloneevent; it was supported by the collaboration ofexperts, enabling technologies and a long historyof innovative developments in drilling automation.
As industries advance and mature, automationenters almost every level of operation. Automationenables companies to achieve consistency in bothprocesses and products, improve safety andefficiency, and reduce risk and costs. Automation
breakthroughs have allowed companies to bemore competitive by replacing manual andcognitive tasks done by humans with thoseperformed by machines. A prime example of theindispensability of automation is in automobilemanufacturing, because machines do repetitivetasks better and faster with highly consistentresults. In addition, automation removes humansfrom inherently dangerous tasks, such as welding.
Automation is also evident in the commercialaviation industry, which has undergone a majortransformation since the 1970s. Increasedpassenger counts and cargo loading led to moreairlines, more planes and more congestion in the
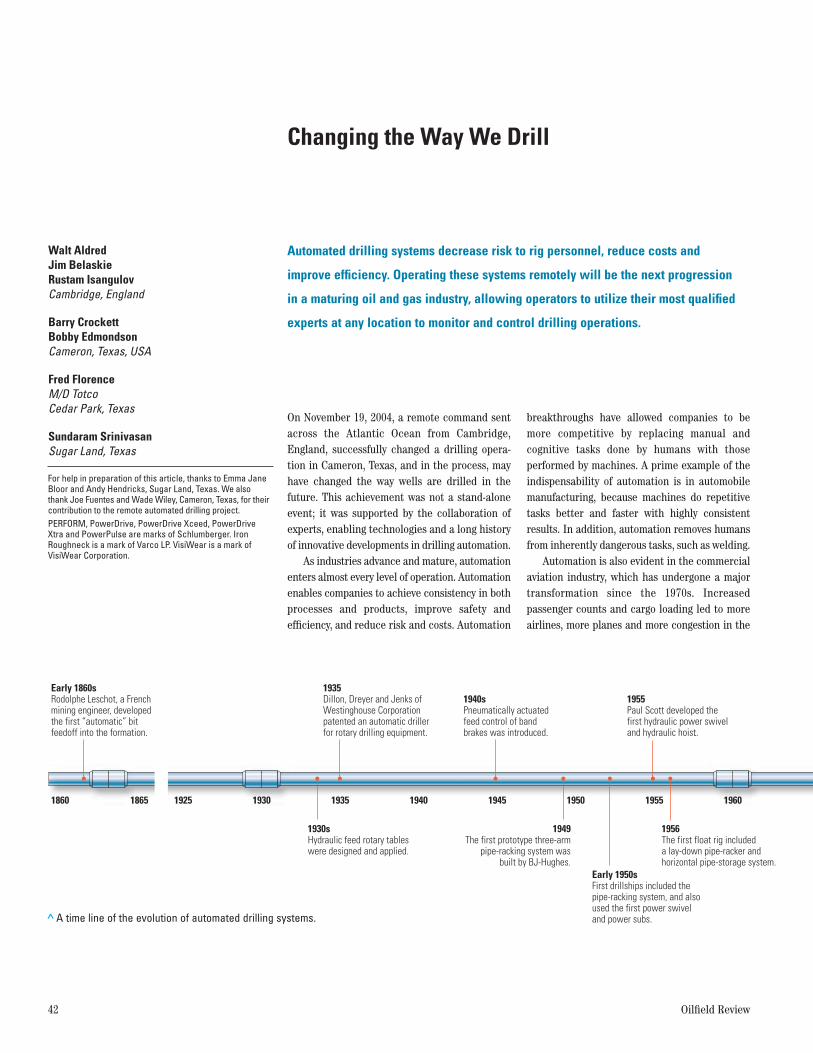
Early 1860sRodolphe Leschot, a Frenchmining engineer, developedthe first “automatic” bitfeedoff into the formation.
1949The first prototype three-arm
pipe-racking system wasbuilt by BJ-Hughes.
Early 1950sFirst drillships included thepipe-racking system, and alsoused the first power swiveland power subs.
1955Paul Scott developed thefirst hydraulic power swiveland hydraulic hoist..
1930sHydraulic feed rotary tableswere designed and applied.
1940sPneumatically actuatedfeed control of bandbrakes was introduced.
1956The first float rig includeda lay-down pipe-racker andhorizontal pipe-storage system.
1860 1865 1930 1935 1940 1945 1950 1955 19601925
1935Dillon, Dreyer and Jenks ofWestinghouse Corporationpatented an automatic drillerfor rotary drilling equipment.
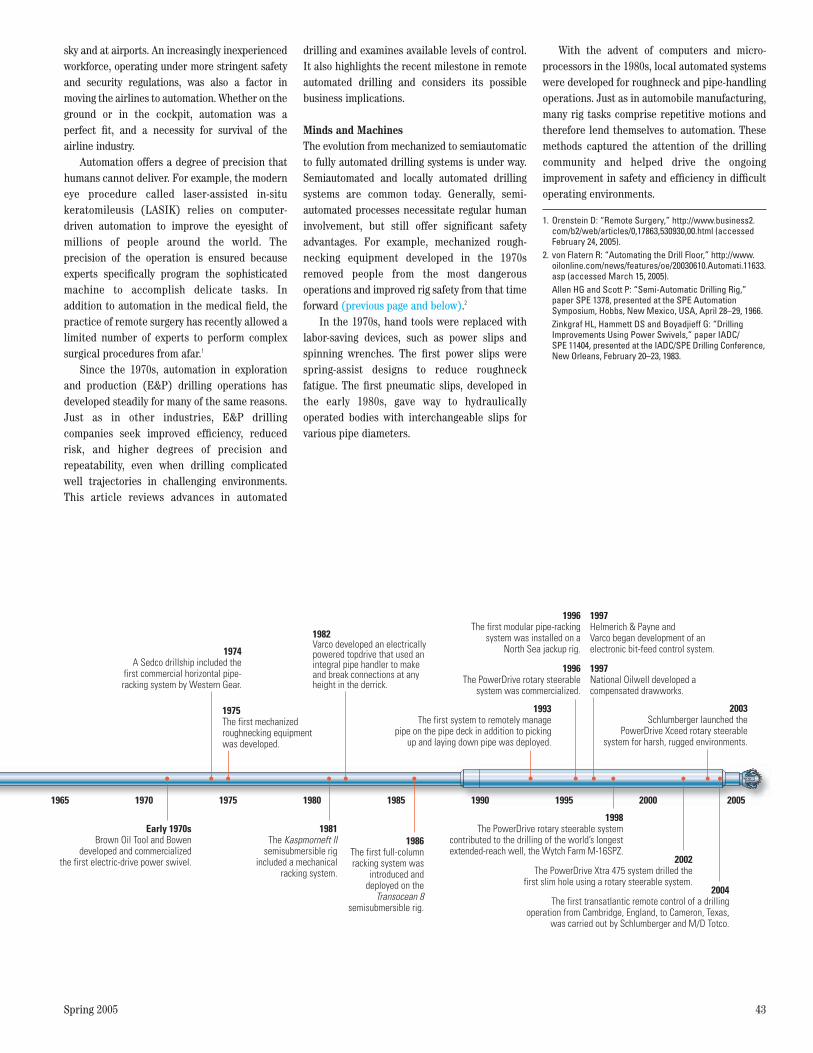
> A time line of the evolution of automated drilling systems.
Spring 2005 43
sky and at airports. An increasingly inexperiencedworkforce, operating under more stringent safetyand security regulations, was also a factor inmoving the airlines to automation. Whether on theground or in the cockpit, automation was a perfect fit, and a necessity for survival of theairline industry.
Automation offers a degree of precision thathumans cannot deliver. For example, the moderneye procedure called laser-assisted in-situkeratomileusis (LASIK) relies on computer-driven automation to improve the eyesight ofmillions of people around the world. Theprecision of the operation is ensured becauseexperts specifically program the sophisticatedmachine to accomplish delicate tasks. Inaddition to automation in the medical field, thepractice of remote surgery has recently allowed alimited number of experts to perform complexsurgical procedures from afar.1
Since the 1970s, automation in explorationand production (E&P) drilling operations hasdeveloped steadily for many of the same reasons.Just as in other industries, E&P drillingcompanies seek improved efficiency, reducedrisk, and higher degrees of precision andrepeatability, even when drilling complicatedwell trajectories in challenging environments.This article reviews advances in automated
drilling and examines available levels of control.It also highlights the recent milestone in remoteautomated drilling and considers its possiblebusiness implications.
Minds and MachinesThe evolution from mechanized to semiautomaticto fully automated drilling systems is under way.Semiautomated and locally automated drillingsystems are common today. Generally, semi-automated processes necessitate regular humaninvolvement, but still offer significant safetyadvantages. For example, mechanized rough-necking equipment developed in the 1970sremoved people from the most dangerousoperations and improved rig safety from that timeforward (previous page and below).2
In the 1970s, hand tools were replaced withlabor-saving devices, such as power slips andspinning wrenches. The first power slips werespring-assist designs to reduce roughneckfatigue. The first pneumatic slips, developed inthe early 1980s, gave way to hydraulicallyoperated bodies with interchangeable slips forvarious pipe diameters.
With the advent of computers and micro-processors in the 1980s, local automated systemswere developed for roughneck and pipe-handlingoperations. Just as in automobile manufacturing,many rig tasks comprise repetitive motions andtherefore lend themselves to automation. Thesemethods captured the attention of the drillingcommunity and helped drive the ongoingimprovement in safety and efficiency in difficultoperating environments.
1. Orenstein D: “Remote Surgery,” http://www.business2.com/b2/web/articles/0,17863,530930,00.html (accessedFebruary 24, 2005).
2. von Flatern R: “Automating the Drill Floor,” http://www.oilonline.com/news/features/oe/20030610.Automati.11633.asp (accessed March 15, 2005).Allen HG and Scott P: “Semi-Automatic Drilling Rig,”paper SPE 1378, presented at the SPE Automation Symposium, Hobbs, New Mexico, USA, April 28–29, 1966.Zinkgraf HL, Hammett DS and Boyadjieff G: “DrillingImprovements Using Power Swivels,” paper IADC/SPE 11404, presented at the IADC/SPE Drilling Conference,New Orleans, February 20–23, 1983.
Early 1970sBrown Oil Tool and Bowen
developed and commercializedthe first electric-drive power swivel.
1974A Sedco drillship included the
first commercial horizontal pipe-racking system by Western Gear.
1975The first mechanizedroughnecking equipmentwas developed.
1981The Kaspmorneft II
semisubmersible rigincluded a mechanical
racking system.
1986The first full-columnracking system was
introduced anddeployed on the
Transocean 8semisubmersible rig.
1993The first system to remotely manage
pipe on the pipe deck in addition to pickingup and laying down pipe was deployed.
1996The first modular pipe-racking
system was installed on aNorth Sea jackup rig.
1997Helmerich & Payne andVarco began development of anelectronic bit-feed control system.
1997National Oilwell developed acompensated drawworks.
2002The PowerDrive Xtra 475 system drilled the
first slim hole using a rotary steerable system.
2003Schlumberger launched the
PowerDrive Xceed rotary steerablesystem for harsh, rugged environments.
2004The first transatlantic remote control of a drilling
operation from Cambridge, England, to Cameron, Texas,was carried out by Schlumberger and M/D Totco.
1982Varco developed an electricallypowered topdrive that used anintegral pipe handler to makeand break connections at anyheight in the derrick.
1965 1970 1975 1980 1985 1990 1995 2000 2005
1996The PowerDrive rotary steerable
system was commercialized.
1998The PowerDrive rotary steerable system
contributed to the drilling of the world’s longestextended-reach well, the Wytch Farm M-16SPZ.

Varco introduced the Iron Roughneck in thelate 1980s, first as an extension of power tongsfor drillpipe only. Casing tongs were added next.In the latest designs, the machine size wasreduced to fit on land rigs, allowing automationto reach a wider market.
Developments in automated rig systems have primarily focused on reducing personnelexposure to fatigue and risk during pipe-handlingactivities. These activities still require humaninput and supervision from a local controlconsole or drilling control room.3 Over time,significant advances in automating roughneckand pipe-racking tasks have decreased risk in more dangerous operating environments, suchas on semisubmersible rigs floating in rough seas (above).
Pipe-racking machines were developed first totrip and rack stands of drillpipe. Offline standbuilding allowed faster drilling operations bymaking up the bottomhole assembly (BHA) whiledrilling. Dual-operation deepwater rigs have twopenetrations through the rig floor to enablerunning drilling riser and surface casingsimultaneously. With pipe-rackers, the need for
someone in the derrick disappeared, but remotelyoperated elevators were required. With more rigautomation, control systems were ergonomicallydesigned to allow the driller and assistant drillerto coordinate drill-floor activities and monitor allfacets of the drilling operation.
Fully automated rig systems, which mustfunction without rig personnel and specialists onsite, require extensive monitoring and controlcapabilities. These systems potentially offersignificant advantages in deepwater subseaenvironments, but a fully automated rig remainsa challenge for the future.4 Although initialefforts to reduce rig manpower had only limitedsuccess, recently, the industry has beeninterested in monitoring several operations froma remote facility staffed with experiencedsupport personnel who can assist relatively newdrilling crews.
Automated drilling systems address themechanics of drilling in the subsurface, andtripping in and out of a wellbore.5 These systemsrequire real-time surface and downhole data toeffectively control drilling processes, and haverecently become more practical as oil and gas
monitoring and control technologies continue toadvance. This increased real-time data avail-ability promotes early detection of drillingproblems, which can now be mitigated by humanintervention, or in the future, by automatedsystems using simulations and models.6
Under ControlJudicious and effective control of complexdrilling processes requires data, experience andexpertise. Automatic drilling control can beaccomplished by surface or downhole actions. Inthe 1970s, the first semiautomatic systems weresurface controlled and required drillers tomanually set standard drilling parameters suchas weight on bit (WOB), torque, rotations perminute (rpm) and pump pressure. Generally,these early systems had serious reliabilityproblems, did a poor job of controlling drillingparameters, and were not able to set andmaintain the rate of penetration (ROP).
As time passed, several different methodswere used for automatic feed control—thegradual application of weight to the bit tofacilitate the cutting and penetration ofsubsurface strata. Feed control is accomplishedthrough the use of the brake on the rig floor. Asearly as the 1940s, the automated actuation of rigbraking systems was accomplished pneumatically.However, drillers using manual systems over-whelmingly outperformed these semiautomaticsystems. Eventually, with improved valve designand integrated system testing, pneumatic controlsystems became successful.
Throughout the 1980s and 1990s, systemcapabilities were boosted by increased computerpower and by the quantity and quality ofmeasurements-while-drilling (MWD) data. Thesedata provided crucial information on drillingconditions and helped pave the way forautomated rig systems capable of controllingdrilling parameters, including ROP (next page).Multiparameter control systems by Wildcat andVarco were built to regulate the payout of drillline based on desired WOB, ROP, torque andstandpipe pressure. The standpipe pressure wasrepresentative of the position of the drill bitrelative to the bottom of the hole, which is criticalfor horizontal and extended-reach drilling.
In addition, the combination of a newproportional current-regulated electric brakecontroller, developed by the Baylor Company, andclutch-type and disk brakes manufactured byEaton and National Oilwell, respectively, gavemore precise braking than self-energizing bandbrakes. New control algorithms by Varco, anadvanced data acquisition system developed by
44 Oilfield Review
> An automated rig floor. Mechanization and automation of driller and roughneck operations havereduced exposure of rig personnel to hazards during pipe-handling duties, increased efficiency onthe rig floor and in drilling, and improved borehole quality. Mechanized roughneck equipment (left)makes up drillpipe and casing joints. Dual-operations automated pipe-racking (upper right) retrievesand stacks double or triple stands of drillpipe and the required bottomhole assembly (BHA), andcasing. Automated system consoles allow drillers to monitor and control all facets of drillingoperations (lower right).

Spring 2005 45
M/D Totco and similar systems by Hitec andothers, enabled improved control of brakingtorque. This advance brought improved bit-feedcontrol to new automated drilling systems, whichsoon significantly outperformed drillers usingmanual systems.7
As the performance of automated drillingsystems continued to improve, the systemsoftware became increasingly complex and moredifficult to use and troubleshoot. It becamenecessary to design software that would simplifycontrol and remove the need to have a skilleddriller operate the system. The new software alsoautomated the changing, or tuning, of drillingparameters within practical limits. Much of thistuning was required because of changingformation characteristics as the bit drilledsubsurface strata. Extensive modeling of thedynamic rig system led to the development ofimproved software control, which incorporatedformation models to control WOB and ROP.
Faster response time to changes facilitatedfine-tuning, which produced smoother appli-cation of the bit to the formation. This reducedvibration, extending the life of BHA tools andbits, and improving fullbore core recovery. Thistechnology produced more consistent drillingpractices than were possible with humans at thecontrols, leading to improved borehole quality,formation evaluation and cementing. Mistakesmade by human drillers when tripping in and outof the borehole, such as accidental fracturingand swabbing of formations, were also decreasedas automation took hold. Improved automationwas tested in south Texas, USA, on a Helmerich &Payne (H&P) drilling rig equipped withautomated drilling hardware and software. Thisfirst-generation system drilled wells faster, with37% less rotating time, and used 34% fewer bitsthan nonautomated rigs in the same area.8
An essential component of improving bothsurface and downhole control was having moreinformation at hand to direct control decisions.An expanding array of important data alsobecame available from logging-while-drilling(LWD) and pressure-while-drilling (PWD) tools.9
Geologists and engineers can now ascertainformation properties to direct a well path foroptimal hydrocarbon production and recovery.Real-time annular pressure data can be used todetermine equivalent circulating density (ECD),which helps drilling engineers assess wellboreinstability, lost-circulation problems and hole-cleaning efficiency. These capabilities areespecially important in extended-reach wells. Inaddition, PWD data, along with dipole shearsonic data, have been used in soft-sediment
reservoirs to determine rock-strength param-eters for predicting sand production.10 Real-timemonitoring of crucial drilling data reduces riskwhile drilling wells by bringing step-changeimprovements to prevent stuck pipe, fishing jobsand loss of wellbores.
New information along with advances inrotary steerable drilling technology have
improved drilling efficiency, directional drillingcontrol and hole quality. In addition, problemsassociated with stuck pipe, casing installationand hole cleaning have been reduced.11 Newtechnologies, such as PowerDrive rotarysteerable systems, have improved directionaldrilling capability because of the immediateresponse to high-level commands sent downhole
3. Harbour WD, Kracik J and Ford D: “An Ergonomic, Process Oriented Approach to Driller’s Consoles,” paper IADC/SPE 39330, presented at the IADC/SPEDrilling Conference, Dallas, March 3–6, 1998.Reid D: “The Development of Automated Drilling Rigs,”paper IADC/SPE 39373, presented at the IADC/SPEDrilling Conference, Dallas, March 3–6, 1998.Hansen MD and Abrahamsen E: “Improving Safety Performance Through Rig Mechanization,” paperSPE/IADC 67705, presented at the SPE/IADC Drilling Conference, Amsterdam, February 27–March 1, 2001.
4. For more on fully automated rig systems: http://www.kingdomdrilling.co.uk/drillops/openwater/OW9.pdf(accessed March 9, 2005).
5. Murray D, Montgomery D and Florence F: “Risk Mitigation Technique for Advanced Rig Control Systems,”paper IADC/SPE 72329, presented at the IADC/SPE Middle East Drilling Technology Conference, Bahrain,October 22–24, 2001.Hofschröer M: “Automated Drilling Application for Gaining Higher Efficiency on Extended Reach Wells,”paper SPE/IADC 85336, presented at the SPE/IADC Middle East Drilling Technology Conference and Exhibition, Abu Dhabi, UAE, October 20–22, 2003.
6. Rommetveit R, Bjørkevoll KS, Halsey GW, Larsen HF,Merlo A, Nossaman LN, Sweep MN, Silseth KM and Ødegaard SI: “Drilltronics: An Integrated System forReal-Time Optimization of the Drilling Process,” paperIADC/SPE 87124, presented at the IADC/SPE Drilling Conference, Dallas, March 2–4, 2004.
7. Boyadjieff G, Murray D, Orr A, Porche M and Thompson P:“Design Considerations and Field Performance of anAdvanced Automatic Driller,” paper SPE/IADC 79827, presented at the SPE/IADC Drilling Conference, Amsterdam, February 19–21, 2003.
8. Boyadjieff et al, reference 7.9. Mallary CR, Varco M and Quinn D: “Using Pressure-
While-Drilling Measurements to Solve Extended-ReachDrilling Problems on Alaska’s North Slope,” paper SPE 54592, presented at the SPE Western Regional Meeting, Anchorage, May 26–27, 1999.
10. Bratton T, Bricout V, Lam R, Plona T, Sinha B, Tagbor Kand Venkitaraman A: “Rock Strength Parameters fromAnnular Pressure While Drilling and Dipole Sonic Dispersion Analysis,” Transactions of the SPWLA 45thAnnual Logging Symposium, Noordwijk, The Netherlands,June 6–9, 2004, paper O.
11. Williams M: “Better Turns for Rotary Steerable Drilling,” Oilfield Review 16, no. 1 (Spring 2004): 4–9.Tribe IR, Burns L, Howell PD and Dickson R: “PreciseWell Placement with Rotary Steerable Systems and Logging-While-Drilling Measurements,” SPE Drilling &Completion 18, no. 1 (March 2003): 42–49.Brusco G, Lewis P and Williams M: “Drilling StraightDown,” Oilfield Review 16, no. 3 (Autumn 2004): 14–17.Copercini P, Soliman F, El Gamal M, Longstreet W, Rodd J, Sarssam M, McCourt I, Persad B and Williams M: “Powering Up to Drill Down,” OilfieldReview 16, no. 4 (Winter 2004/2005): 4–9.
> Automated drillers. Automated weight-on-bit (WOB) control isaccomplished by modifying the manual rig brake system through the use ofa pneumatically controlled cable and pulley system. The automated systemcan be overridden to resume manual operations. The first autodrillerscontrolled the payout of the drill line to maintain a constant weight on bit.Horizontal and extended-reach drilling, with most of the drillstring weight onthe bottom of the hole, required payout control based on standpipe pressure.The newest systems use electronic control.
Liftunit
Liftline
Flexibleshaft Drawworks
Air filter
Air supply
On-off valve
Brake lever
Drum unit
Spring
Pump pressure
Weight-on-bit
Multiparameter Automated Drilling System
to the system-control unit with real-timefeedback from MWD and LWD measurements.Commands are sent downhole using changingflow-rate patterns, and data are returned upholethrough the mud column as pulses using ruggedtelemetry tools, such as the PowerPulse MWDtelemetry system.
Remotely PossibleThe next step in automated drilling will be tocontrol the process from afar. Computer andsatellite telecommunications technologies haveadvanced to the point where monitoring andcontrol systems are now common inhydrocarbon-production operations around theworld. Local remote-control operations, alsocalled local automations, exist today on moderndrilling rigs for automated pipe-handling,topdrive and integrated drill-floor operations.12
To date, long-distance remote data commun-ications in drilling operations have been usedexclusively for monitoring and reporting.
Local remote-control operations reducedmanpower requirements and risk to personnel.Initial designs moved the operator from the drillfloor into an environmentally controlled cabin outof harm’s way. Recognizing that the life-styleassociated with working on a drilling rig isdemanding, companies have found it easier andmore beneficial to hire and retain employees ifthey could work from an office environment, doingmany of the same tasks remotely. For example,technicians can now test and analyze equipmentperformance from the safety of an office. Remotesystems are also being used to automaticallyinstall applications and virus-software updates forrig-based software. More importantly, these newcapabilities allow drilling experts to track and
analyze historical drilling data and statistics,which helps rig companies and operatorsformulate improved procedures that increaseefficiency and reduce operating costs.13
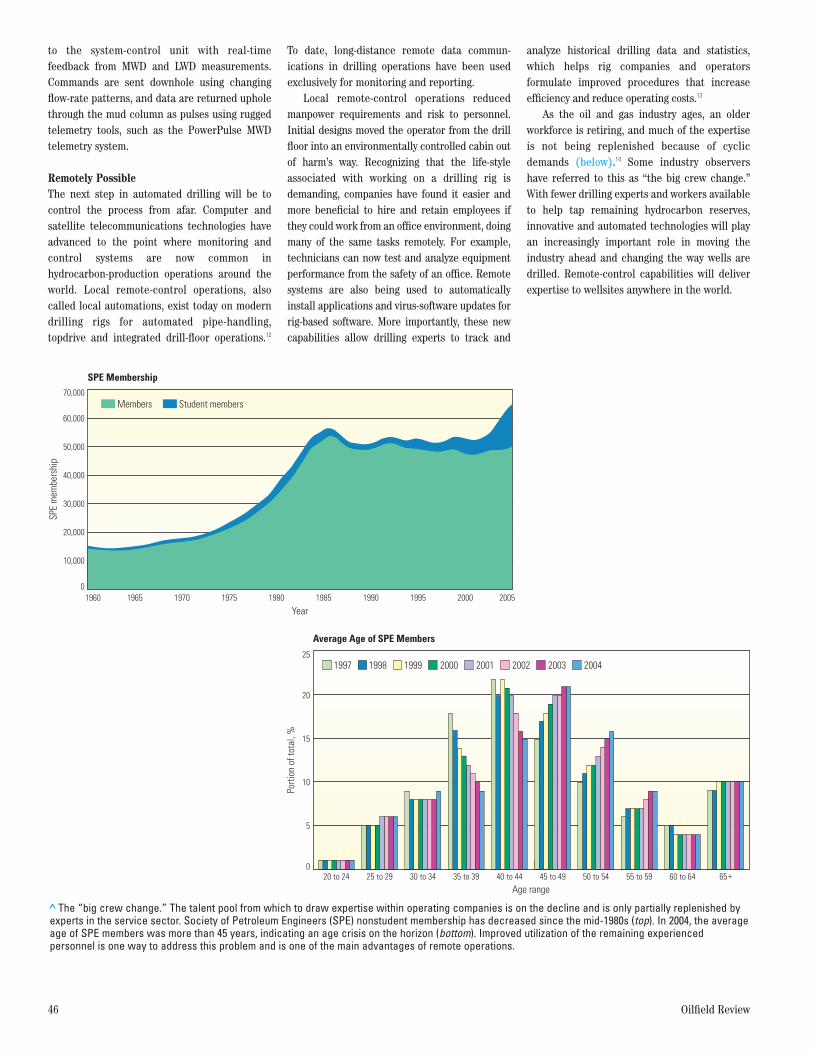
As the oil and gas industry ages, an olderworkforce is retiring, and much of the expertiseis not being replenished because of cyclicdemands (below).14 Some industry observershave referred to this as “the big crew change.”With fewer drilling experts and workers availableto help tap remaining hydrocarbon reserves,innovative and automated technologies will playan increasingly important role in moving theindustry ahead and changing the way wells aredrilled. Remote-control capabilities will deliverexpertise to wellsites anywhere in the world.
46 Oilfield Review
> The “big crew change.” The talent pool from which to draw expertise within operating companies is on the decline and is only partially replenished byexperts in the service sector. Society of Petroleum Engineers (SPE) nonstudent membership has decreased since the mid-1980s (top). In 2004, the averageage of SPE members was more than 45 years, indicating an age crisis on the horizon (bottom). Improved utilization of the remaining experiencedpersonnel is one way to address this problem and is one of the main advantages of remote operations.
1997 1998 1999 2000 2001 2002 2003 2004
Porti
on o
f tot
al, % 15
0
10
5
20
25
20 to 24 25 to 29 30 to 34 35 to 39 40 to 44 45 to 49 50 to 54 55 to 59 60 to 64 65+
Age range
Average Age of SPE Members
SPE Membership
Members Student members
10,000
20,000
30,000
40,000
50,000
60,000
70,000
0
SPE
mem
bers
hip
1960 1965 1970 1975 1980 1985 1990 1995 2000 2005
Year

Spring 2005 47
Transatlantic WavesTo realize the full power of remote-controloperations, drilling professionals must have thecapability to apply their expertise from anywherein the world. This concept became reality onNovember 19, 2004, when a command to changea pump rate, sent by scientists at SchlumbergerCambridge Research (SCR) in England, wasreceived and executed by a drilling rig at the Schlumberger Cameron Test Facility in Texas (above).
From almost 5,000 miles [8,000 km] away,drilling parameters, such as WOB, rpm and flowrate, were adjusted remotely, marking the firsttransatlantic control of a drilling operation. This
achievement was a result of months ofcollaboration with M/D Totco and teamworkbetween the SCR remote-drilling project membersand the Cameron engineering and rig staff.
Along with the collaborative aspects, thesuccess of the project also depended on keytechnical requirements. Significant expertisewas required in deciding what parameters wouldbe controlled remotely and how the desiredactions would physically take place. M/D Totcoinstalled crucial systems at the Cameron site—the automated driller hardware that physicallycontrols the existing brake system, and theautomated rig controller, which directs the inputand output control of key electrical systems on
the rig. Vital communication systems also wereinstalled, such as a VisiWear wireless video-communication system and a camera on thedrilling floor. Effective communications throughhigh-quality and reliable videoconferencingproved extremely valuable to team membersduring the course of this project.
12. Gaddy D: “Remote-Controlled Operations to BenefitDrilling Industry,” http://www.kingdomdrilling.co.uk/drillops/drill_operations/equipment/RAR01.pdf (accessedMarch 9, 2005).
13. Gaddy, reference 12.14. Membership demographics for the Society of Petroleum
Engineers (SPE) can be found at http://www.spe.org/spe/jsp/basic/0,2396,1104_1848_0,00.html (accessed April 6,2005) and http://www.mmsa.net/Publications/EducationEthicsA_lheinze.pdf (accessed April 4, 2005).
> Transatlantic remote control. On November 19, 2004, the first transatlantic remote-control drilling command was sent from Schlumberger CambridgeResearch (SCR), in England, to a drilling rig in Cameron, Texas. A command to change pump rate was issued by SCR scientists and sent through a secureintranet using a prototype application. The command was received and carried out at the Cameron site. An important part of the procedure included audioand video confirmation from the drilling rig that the command and all subsequent commands were properly executed. Data were sent continuously everythree seconds and every 0.5 ft [0.15 m] with minimal lag times. All transmitted commands required a four-second acknowledgment routine during testing.
Cambridge,England
Cameron,Texas
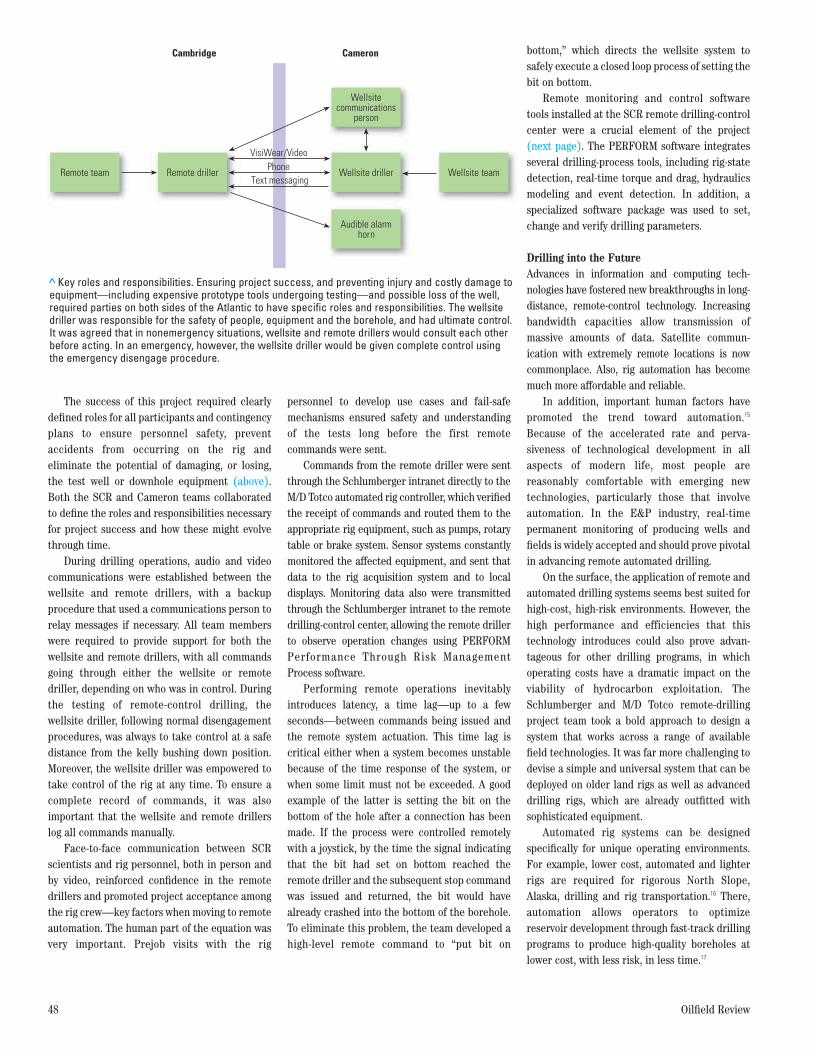
The success of this project required clearlydefined roles for all participants and contingencyplans to ensure personnel safety, preventaccidents from occurring on the rig andeliminate the potential of damaging, or losing,the test well or downhole equipment (above).Both the SCR and Cameron teams collaboratedto define the roles and responsibilities necessaryfor project success and how these might evolvethrough time.
During drilling operations, audio and videocommunications were established between thewellsite and remote drillers, with a backupprocedure that used a communications person torelay messages if necessary. All team memberswere required to provide support for both thewellsite and remote drillers, with all commandsgoing through either the wellsite or remotedriller, depending on who was in control. Duringthe testing of remote-control drilling, thewellsite driller, following normal disengagementprocedures, was always to take control at a safedistance from the kelly bushing down position.Moreover, the wellsite driller was empowered totake control of the rig at any time. To ensure acomplete record of commands, it was alsoimportant that the wellsite and remote drillerslog all commands manually.
Face-to-face communication between SCRscientists and rig personnel, both in person andby video, reinforced confidence in the remotedrillers and promoted project acceptance amongthe rig crew—key factors when moving to remoteautomation. The human part of the equation wasvery important. Prejob visits with the rig
personnel to develop use cases and fail-safemechanisms ensured safety and understandingof the tests long before the first remotecommands were sent.
Commands from the remote driller were sentthrough the Schlumberger intranet directly to theM/D Totco automated rig controller, which verifiedthe receipt of commands and routed them to theappropriate rig equipment, such as pumps, rotarytable or brake system. Sensor systems constantlymonitored the affected equipment, and sent thatdata to the rig acquisition system and to localdisplays. Monitoring data also were transmittedthrough the Schlumberger intranet to the remotedrilling-control center, allowing the remote drillerto observe operation changes using PERFORMPerformance Through Risk Management Process software.
Performing remote operations inevitablyintroduces latency, a time lag—up to a fewseconds—between commands being issued andthe remote system actuation. This time lag iscritical either when a system becomes unstablebecause of the time response of the system, orwhen some limit must not be exceeded. A goodexample of the latter is setting the bit on thebottom of the hole after a connection has beenmade. If the process were controlled remotelywith a joystick, by the time the signal indicatingthat the bit had set on bottom reached theremote driller and the subsequent stop commandwas issued and returned, the bit would havealready crashed into the bottom of the borehole.To eliminate this problem, the team developed ahigh-level remote command to “put bit on
bottom,” which directs the wellsite system tosafely execute a closed loop process of setting thebit on bottom.
Remote monitoring and control softwaretools installed at the SCR remote drilling-controlcenter were a crucial element of the project (next page). The PERFORM software integratesseveral drilling-process tools, including rig-statedetection, real-time torque and drag, hydraulicsmodeling and event detection. In addition, aspecialized software package was used to set,change and verify drilling parameters.
Drilling into the FutureAdvances in information and computing tech-nologies have fostered new breakthroughs in long-distance, remote-control technology. Increasingbandwidth capacities allow transmission ofmassive amounts of data. Satellite commun-ication with extremely remote locations is nowcommonplace. Also, rig automation has becomemuch more affordable and reliable.
In addition, important human factors havepromoted the trend toward automation.15
Because of the accelerated rate and perva-siveness of technological development in allaspects of modern life, most people arereasonably comfortable with emerging newtechnologies, particularly those that involveautomation. In the E&P industry, real-timepermanent monitoring of producing wells andfields is widely accepted and should prove pivotalin advancing remote automated drilling.
On the surface, the application of remote andautomated drilling systems seems best suited forhigh-cost, high-risk environments. However, thehigh performance and efficiencies that thistechnology introduces could also prove advan-tageous for other drilling programs, in whichoperating costs have a dramatic impact on theviability of hydrocarbon exploitation. TheSchlumberger and M/D Totco remote-drillingproject team took a bold approach to design asystem that works across a range of availablefield technologies. It was far more challenging todevise a simple and universal system that can bedeployed on older land rigs as well as advanceddrilling rigs, which are already outfitted withsophisticated equipment.
Automated rig systems can be designedspecifically for unique operating environments.For example, lower cost, automated and lighterrigs are required for rigorous North Slope,Alaska, drilling and rig transportation.16 There,automation allows operators to optimizereservoir development through fast-track drillingprograms to produce high-quality boreholes atlower cost, with less risk, in less time.17
48 Oilfield Review
> Key roles and responsibilities. Ensuring project success, and preventing injury and costly damage toequipment—including expensive prototype tools undergoing testing—and possible loss of the well,required parties on both sides of the Atlantic to have specific roles and responsibilities. The wellsitedriller was responsible for the safety of people, equipment and the borehole, and had ultimate control.It was agreed that in nonemergency situations, wellsite and remote drillers would consult each otherbefore acting. In an emergency, however, the wellsite driller would be given complete control usingthe emergency disengage procedure.
Cambridge Cameron
Remote team Remote driller
Wellsitecommunications
person
Wellsite driller Wellsite team
VisiWear/VideoPhone
Text messaging
Audible alarmhorn

Spring 2005 49
This new way to drill wells will allow qualifiedpeople across multiple disciplines to havegreater involvement in drilling decisions. It willalso reduce logistical costs and minimizetransportation-related risks. Combined withongoing efforts in collaboration and visuali-zation, remote automated drilling has thepotential to move the industry forwardsignificantly. However, those from other E&Pdisciplines can become involved in actual drillingprocesses only when they are adequately cross-trained and have acquired both knowledge andexperience in drilling.
Intertwined with the progression andapplication of remote automated processes is theall-important human element.18 Although theyanticipated skepticism from the drillingcommunity, the remote-drilling project membersat SCR were buoyed by the drillers’ wideacceptance and eagerness to move the remote-drilling project forward. This acceptance waslargely because the rig personnel were directly
involved in use-case developments and fail-safedesigns that covered all operational scenarios.Other human factors have yet to be encountered.Can we anticipate the possible dynamics andmitigate the potential downfalls of having asingle expert at a remote location managingseveral drilling operations at once? Will weunderestimate the complexity of drilling andrevert back to simplified and ineffective modelsand control systems?
The marriage of automation and remote-control capabilities in drilling operations furtherreduces wellsite personnel exposure tohazardous environments and bolsters efficiencygains already realized in automation. Thesynergy of automation and remote-controlcapabilities utilizes expertise at central locationsmore efficiently by placing experts at thecontrols of multiple and simultaneous drillingoperations. Remote collaboration also brings theopportunity to directly incorporate morecrossdisciplinary knowledge into decision
making, for example, in subsurface targetselection and directional drilling processes.
In the future, remote automated operationscould directly connect drilling operations to mechanical earth- and reservoir-modeling software tools, which are not practical to run andsupport on drilling rigs but could be run fromcentralized control facilities onshore. This mightalso enable automated real-time control, simu-lation and model updating under the watchfuleye of experts.
Drilling takes place in some of the mosthostile environments on earth. Out of necessity,well drilling has become a precise science. Andwhile the industry must depend on a decreasingnumber of drilling professionals, it isstrengthened by technological advances thathelp accomplish the vital task of drilling wellswith greater precision and efficiency, anddecreased risk and cost. Remote control fromafar is the next step in automated drillingoperations, but reaching that goal will requireuniversal acceptance and ownership by thedrilling community. Just as complex tasks havebeen performed remotely by other industries,remote automated drilling, with its obviousbenefits, will inevitably change the way we drill. —MGG
> A wall of information and communication. The remote drilling-control center at SCR in Cambridge,England, is equipped with multiple screens to facilitate complete monitoring and analysis of drilling,MWD and LWD data. The control room also supports full videoconferencing capabilities. Data andcommunications are transmitted through the Schlumberger intranet.
15. Wilson J and Stanton N: “Safety and PerformanceEnhancement in Drilling Operations by Human FactorsIntervention,” http://www.hse.gov.uk/research/rrpdf/rr264.pdf (accessed March 20, 2005).
16. Dunn MD, Archey PJ, Opstad EA, Miller ME and Otake T:“Design, Specification, and Construction of a Light, Automated Drilling System (LADS),” paper IADC/SPE 74451, presented at the IADC/SPE Drilling Conference, Dallas, February 26–28, 2002.
17. Hofschröer, reference 5.18. Whyte JA: “Adding the Human Factor to Rig Anti-
Collision Systems: A New Technology Explored,” paperSPE 84352, presented at the SPE Annual Technical Conference and Exhibition, Denver, October 5–8, 2003.