-
CHE3162 Lecture 8
Introduction To Feedback Control Loops
Chapter 7&8: Marlin Chapter 7: Seborg Chapter 6-1: Smith
& Corripio
-
Learning Objectives
Introduce feedback control and important terms
Understand a feedback block diagram and relationship to real
world
Intro to PID control
-
CHE3162: where are we up to?
So far, we have studied system responses A disturbance (step
change,sine wave) enters
our process Shown how process responds, depending on
1st order, 2nd order, dead time, etc Ultimately, we want process
control
Incoming disturbances have MINIMAL effect on process outputs
Next step on to controlling the responses!
-
Plot
Time (sec)
0 1 2 3 4 5 6 7 8 9 10
-2.0
-1.5
-1.0
-.5
0
.5
1.0
1.5
2.0
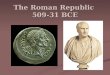
Control benefits:Reducing variability
1 5 9
0
Plot
Time (sec)
0 2 3 4 6 7 8 10
-2.0
-1.5
-1.0
-.5
.5
1.0
1.5
2.0
Time Good
control
-
Control of Tank Level
Want to keep constant tank level
Flowrate of inlet stream is fluctuating
Denn. Chem Eng Intro
-
Control of Tank Level
Inlet flowrate initially steady at q*
Temporary step change in inlet flowrate occurs
Inlet flowrate increases by Q* then returns to original
value
No Control: Tank level increases then plateaus
With Control: level increases but by less and returns to close
to original level
Denn. Chem Eng Intro
-
Constant inlet fluctuations Inlet varying
constantly As a result, tank
level will also vary (without control)
Simple control (solid line) significantly reduces tank level
changes
Inlet flowrate to tank
Tank level without and with control
Denn. Chem Eng Intro
-
A FEEDBACK Control System Temperature control of a heat
exchanger
Cold fluid
Hot fluid
Steam Sensor & Transmitter
Steam or condensate
exhaust
Controller
Valve
Set point
Feedback loop
Temperature, flow changes are DISTURBANCES
Exercise: Find another disturbance variable
-
Cold fluid Steam or
condensate exhaust
Piping and Instrument Diagram (P&ID)
Heat exchanger temperature control
Field mounted instrument
Panel mounted controller
Hot fluid
Steam
TC 101
TT 101
SP
Computer control
-
PROCESS (Heat exchanger)
T F
Feedback Control System Block Diagram
VALVE Controller U
Measuring element (sensor)
Tm
DISTURBANCE D
+ + Ts E
+ -
All variables are functions of time. On the diagram we represent
them as Laplace transforms of CHANGES
Error detector
Summing point
-
PROCESS (Heat exchanger)
T F
Feedback Control System Block Diagram
VALVE Controller U
Measuring element (sensor)
Tm
DISTURBANCE D
+ + Ts E
+ -
Each block is described mathematically by a TRANSFER
FUNCTION
Error detector
U/E = Gc(s) Summing point
-
The Sensor and the Valve
A level measuring sensor usually has a fast response so its time
constant is small and can be neglected (ie., = 0)
The sensor TF is just a gain: Km = Measurement Gain (or Ks)
A control valve is usually a pneumatic valve & can be
represented by a 1st order TF
mm K
TT
=
sv1vK
UF
+= Typical V = 1 sec-1 min
(depends on valve size)
-
Closed Loop Block Diagram
TF of the
Process
Controller TF decides what to do
about the error
Error=SP-MC
TF of the final control element e.g. a 1st
order valve
Setpoint
SP
GM (s)
GD (s)
TF of the Measuring device
CV(s)
(or Y(s) T(s)etc)
D(s) TF of the disturbance
-
Closed loop feedback control
Marlin
Shortcut: CV = forward SP (1 + around the loop)
PROCESS Gp
CV F VALVE
Gv Controller
Gc
U
Measuring sensor Gs (or Gm)
Tm
DISTURBANCE Gd
D
+ + SP E
+ -
Controller
Process equipment
See Tute 4 Q5 for how to derive these two TF responses
-
Controllers
A controller calculates an output signal based on the measured
error and a control algorithm Error = Setpoint Measured value
A simple controller: Proportional Control Output is proportional
to the error u(t) = Kc*e(t) + u(0)
Kc is called the (proportional) gain u(0) is the output when
error = 0
cKEU
=
-
Cold fluid T change
Hot fluid
Steam
TC 101
TT 101
SP
Proportional Temperature Control using an FODT Model
Use steam flow Fs to control T at TSP
Incoming temp disturbance TD
Assume FODT models for: T/Fs T/TD
Start with a Proportional Controller for TC101
TSP
T
TD
Fs
U
-
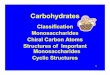
Temperature Control of a Heat Exchanger Block Diagram
Gp T Fs
Gv Kc U
Km Tm
Gd TD
+ +
TSP E +
-
oC/oC
oC/(kg/min)
oC/oC (kg/min)/%
%/oC
Fast response
Exercise: Confirm that the product of all gains around the loop
is dimensionless
-
Temperature Control of a Heat Exchanger Block Diagram
4e-2s 1 + 15s
T Fs 0.5 1 +0.5s Kc
U
Km = 1 Tm
1e-s 1+5s
TD
+ +
Ts E +
-
Time units: minutes oC/oC
oC/(kg/min)
oC/oC (kg/min)/%
%/oC
Fast response
Exercise: Confirm that the product of all gains around the loop
is dimensionless
-
PID response matches common sense
If a big error occurs: You need a big response Proportional
P
But there is still a remaining error: Adjust until you eliminate
error Integral I
Rapid change rapid response required Derivative D
+++= u(0)]dtdee(t)dt
iT1[e(t)cKu(t) d
-
PID algorithm
PID algorithm considers the weighting of the following types of
corrections: Proportional P - Corrections based on the present
error
e(t) Integral I - Corrections based on the sum of the past
errors (integral of e(t)) Derivative D - Corrections based on
future predictions of
errors, using the rate of change of errors over time (de/dt)
+++= u(0)]dtdee(t)dt
iT1[e(t)cKu(t) d
-
PID Transfer Function
++= s
sTK
EU
dI
c 11
Laplace transform
+++= u(0)]dtdee(t)dt
iT1[e(t)cKu(t) d
U is the controller output E is the difference between SP &
the measured value
Kc = controller gain TI = Integral time d = derivative time
L
-
Typical responses
Seborg
-
Feedback control loop: CV and MV responses
Marlin
-
Error integrals
Smith & Corropio
-
Definition of Open Loop
Gp Y F
Gv U
Gm Ym
+ Gc
SP E +
-
Gd D
+
Open loop = no controller Controller is either off,
disconnected, or in manual
Controller
-
Auto and Manual Control modes
Each controller can be set to auto (on) or manual which means
off
Auto mode: Controller output depends on e(t), controller
constants, and type of controller used. ( PI vs. PID etc.)
Manual Mode: Controller output is adjusted manually. Manual Mode
is very useful when unusual conditions exist:
plant start-up plant shut-down emergencies
Percentage of controllers "on manual ?? (30% in 2001, Honeywell
survey)
Seborg
-
Definition of Closed Loop
Gp Y F
Gv U
Gm Ym
+ Gc
SP E +
-
Gd D
+
This is CLOSED-LOOP
With control
-
Setpoint Change Closed Loop Servo Control
Gp CV Fs
Gv U
GS Tm
+ Gc
SP E +
-
Gd D
+
Make a SP change, triggers error between T & TSP, so loop
adjusts valve to drive T towards TSP
-
Disturbance Change Closed Loop Regulatory Control
Gp CV Fs
Gv U
Gm Tm
+ Gc
SP E +
-
Gd D
+
Regulates any disturbances Disturbance upsets T Results in
difference between T and TSP Controller sees error, adjusts valve
to fix it
-
Proportional Control
Controller output signal is proportional to the error input
signal
u(t) = Kc*e(t) + u(0) Kc is called the (proportional) gain u(0)
is the output when error = 0 Called offset (or manual reset or
bias)
cKEU
=
-
Controller Gain Kc
Controller gain Kc is a number that we can set Used by the
controller during each control calculation
can be adjusted to make the controller output changes as
sensitive as desired to deviations from the set point;
the sign of Kc can be chosen to make the controller output
increase (or decrease) as the error signal increases.
Positive Kc = direct acting controller ie if temp is too high,
valve open the opened.
Negative Kc = reverse acting controller. If temp is too high,
then close the valve.
-
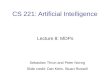
Typical responses after a disturbance step change
Seborg
CHE3162 Lecture 8Learning ObjectivesCHE3162: where are we up
to?Slide Number 4Control of Tank LevelControl of Tank LevelConstant
inlet fluctuationsA FEEDBACK Control SystemTemperature control of a
heat exchangerPiping and Instrument Diagram (P&ID) Heat
exchanger temperature controlFeedback Control SystemBlock
DiagramFeedback Control SystemBlock DiagramThe Sensor and the
ValveClosed Loop Block DiagramClosed loop feedback
controlControllersProportional Temperature Control using an FODT
ModelTemperature Control of aHeat Exchanger Block
DiagramTemperature Control of aHeat Exchanger Block DiagramPID
response matches common sensePID algorithmPID Transfer
FunctionTypical responsesFeedback control loop:CV and MV
responsesError integralsDefinition of Open LoopAuto and Manual
Control modesDefinition of Closed LoopSetpoint Change Closed Loop
Servo ControlDisturbance Change Closed Loop Regulatory
ControlProportional ControlController Gain KcSlide Number 35Typical
responses after a disturbance step change