Embed Size (px)
Citation preview

Computational Aeroacoustics: Overview and Numerical Methods
Tim ColoniusCalifornia Institute of Technology
Pasadena, CA 91125 [email protected]
Contents
1 Overview of CAA 21.1 Goals of CAA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Direct Numerical Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Turbulence and acoustic source modeling . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Numerical Methods 152.1 Finite-difference schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2 Dispersion and dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3 Optimized schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4 Spurious waves, artificial viscosity, and filtering . . . . . . . . . . . . . . . . . . . . . 202.5 Boundary closures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.6 Time marching schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.7 Computational efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.8 Other issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.9 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.10 Outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Abstract
In these lecture notes, we discuss the goals of computational aeroacoustics (CAA) and thenumerical techniques that have been developed to achieve them. We first survey the scientificand engineering issues that have motivated computational approaches to aeroacoustic prob-lems over the past few decades, and define choices of flow model and numerical algorithmsthat are appropriate to the differing goals and applications. Next we examine numericalalgorithms for computation of aerodynamic sound in detail, with the aim of acquainting thestudent with ssues that drive the design of algorithms. In order to keep these notes as briefas possible, no attempt is made to survey the extensive literature on CAA. The student mayconsult recent reviews of CAA [1, 2] for a more complete summary of the field and completereferences to the archival literature.
1

1 Overview of CAA
1.1 Goals of CAA
An overall goal of computational aeroacoustics is to predict the sound radiated by turbulentflow, and perhaps more importantly, to investigate strategies by which noise could be re-duced. The challenge is the enormous range of applications and their complexity. Difficultiesarise because (i) the flows of interest are usually turbulent and involve a range of length andtime scales that are difficult to resolve in a computation, (ii) the flows of interest stem fromcomplex engineering systems (e.g. the complete exhaust system of an aircraft engine), (iii)the physics are complicated when additional features such as shock waves, multiphase flow,chemical reactions, and so on are present, and (iv) the fact that all of these complexities canoccur in the same application!
Like all difficult engineering problems, this complexity must be broken down into simplerunit problems, many of which are in themselves quite challenging. One can put these unitproblems into different but overlapping categories:
• The development of accurate and robust computational methods for solving flow equa-tions (either Navier-Stokes or modeled equations)
• The use of computations (in conjunction with experiments) to investigate fundamentalmechanisms of sound generation
• The use of computation (in conjunction with experiments and theory) to derive simplermodels of turbulence or sound generation processes
• The integration of theory, models, and computation into predictive tools that can beused for engineering design, optimization, and noise reduction strategies.
An important aspect of these categories is that only one of them (the first) only involvescomputation and even there, there are issues that cannot be resolved without recourse to thephysics of the underlying fluid dynamic processes. It is important to recognize that progressin CAA requires progress in experiments, theory, and modeling. Computational approachesto complex problems that ignore (or wish away) the physical challenges are doomed toproduce nothing but pretty pictures. On the other hand, computational approaches to unitproblems can provide insights that drive the modeling and theory to ever more practicaland complex predictions. Prandtl is often quoted as saying “There is nothing more practicalthan a good theory.”
1.2 Direct Numerical Simulation
Sound generation, propagation, scattering, etc. are all described in the continuum limit(comprising the vast majority of relevant applications) by the compressible equations forconservation of mass, momentum, and energy, together with constitutive models (e.g. New-tonian Fluid, Fourier’s law), equations of state, chemical reactions, etc. These relations must
2

be closed by appropriate boundary conditions (solid surfaces, fluid interfaces) and, in addi-tion, initial or boundary data must often be supplied. We will not dwell on these equationssince the objective of these notes is to introduce the student to the overall issues, and theycan be found in standard texts of fluid dynamics.
Once the equations are assembled, we have exhausted the principles that physics hassupplied to us in order to solve the problem. Can we then turn the mathematical crank andsolve them? The answer is yes and no. We can certainly use numerical analysis to discretizethe equations and then solve them by computer. However, as we discuss here, accuratesolution would in most cases require computer resources far in excess of what will exist inour lifetimes.
1.2.1 Turbulence scales and DNS
By Direct Numerical Simulation (DNS), we imply that all relevant scales of the true motionof the fluid are adequately resolved in a computation. Only first principles (continuummechanics) are used to derive the equations, and, in turn, numerical analysis is used toguarantee that the approximate discretized solution is close enough to the true continuoussolution. This latter aspect is know as verification of the numerical solution. In addition, wemust ensure that any auxiliary data (e.g initial and boundary conditions), simplifications,etc. are adequate for the problem at hand; this is usually accomplished by comparing theresult to a related experiment and is termed validation.
Turbulence is characterized by disorganized motion over a range of length and time-scales. The concept of an energy cascade wherein an equilibrium exists between drawingenergy from mean flow gradients (production) and dissipating that energy at the smallestscales allows one to estimate the range of scales for a given flow. The smallest Kolmogorovlength scale, η, is a motion whose length scale and related velocity fluctuation are suchthey form a Reynolds number of order unity so that they are rapidly diffused. The largestscales are essentially set by the extent of the turbulent flow, and are often characterizedin terms of an integral scale, L, that is a measure of the extent over which the motion iscoherent, as gauged by two-point correlations of the velocity, and the magnitude of velocityfluctuations, u′. In turbulent thin shear layers (e.g. mixing layers and jets) it is proportionalto the thickness of the layer, δ, and u′ is proportional to the mean flow velocity or velocitydifference, U . Equating production and dissipation results in an estimate:
η
L=
1
Re34L
(1)
where Re = u′Lν∼ Uδ
ν.
In a DNS, we must resolve length scales as small as η and as large as L. Thus the gridspacing, ∆x must be small like η and the extent of the domain large like L, so that in anycoordinate:
N ∼ L
η∼ Re
34L
3

We must also integrate the equations over time. Generally in compressible flow there is aCourant number that limits the maximum time step for stable and accurate results:
Cmax =a∆t
∆x∼ O(1)
where a is the speed of sound. We must integrate for a total time of several turnover timesof the largest scales, estimated by L
u′ with time step ∆t. We therefore obtain an estimate forthe total computational work to resolve a region of turbulence:
number of operations ∼ N4 ∼ Re3L
M
where M = u′
ais the relevant Mach number. Thus at high Re and/or low M , the number of
operations required is staggering. We note that computing a portion of any radiated acousticfield requires even more operations; this is discussed in the next subsection.
There is, of course, a minimum ReL for which turbulence persists and by the early 1980’s,computers were large and fast enough to allow barely turbulent flows to be computed. Forchannel flow, as an example, this amounts to a Reynolds number of several thousand basedon the gap width and average velocity. Flows relevant to CAA have Reynolds numbers atleast 1000 times higher. Computers have become exponentially faster in the intervening yearsaccording to Moore’s law, and by now we can achieve Reynolds numbers about 10 times whatwas possible in the early 80’s. At that pace a turbulent jet with a Reynolds number of 106
would be feasible in about 60 to 80 years1.This indicates a real need for models that permit some features of a flow to be com-
puted without fully resolving all the scales. Such turbulence models are discussed in thenext subsection, and, for CAA, the presence of the any model for the turbulence also hasramifications for the sound generation process. That is to say, we will often also need tomodel the acoustic sources since they are no longer resolved directly by the numerics.
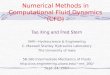
Our estimates here are crude, and do not take account of a constant of proportionalityin our scaling laws. In real flows like turbulent jets, this constant may itself be a largenumber, especially for flows that are geometrically complex such as the exhaust system of ajet aircraft. Even the jet itself, downstream of the nozzle, consists of 4 distinct regions–thenear nozzle turbulent boundary layers, the annular mixing layer surrounding the potentialcore, and the fully developed jet further downstream (see Figure 1).
1.2.2 Implications of acoustic inefficiency and wavelength
Some features of sound generation, namely acoustic inefficiency and the inherent wavelengthmismatch between flow and acoustic scales at low Mach number, require additional con-sideration beyond resolving the range of turbulence scales. A principle contribution of theLighthill theory is to highlight the role of compact sources wherein retarded-time variations
1Provided of course the Moore’s law can be extrapolated that far, which is perhaps unlikely without aparadigm shift in processor design
4

Dj
Uj
θoPotential core
Mixing layer
Fully developed jet
Uc(x) x
δ(x)
Figure 1: Schematic of a turbulent jet. Reprinted from [2] with permission from Elsevier.
over the turbulent source region can be neglected in estimating the far field sound, andthe delicate cancellation in acoustic sources lead to a tiny fraction of the flow energy beingradiated in the form of sound.
Acoustic inefficiency places demands on the numerical method above and beyond therequirements for resolution of turbulent scales discussed above. Since sound waves are small,we must be careful to use sufficiently accurate discretizations so that the acoustic wavesgenerated by the flow are resolved and allowed to propagate to the far field (or computa-tional boundary). If equivalent acoustic sources are to be computed, we must also ensure,for example, that sufficient accuracy is achieved in the computation so that errors in sourcecalculation do not overwhelm the acoustic field. These constraints have led to some special-ized high-order-accurate, low dissipation numerical methods used in CAA and these are thetopic of section 2.
The compact source approximation at low Mach number implies that the time-scale (orfrequency) of the turbulence is preserved in the acoustic far field, but that the acoustic fieldhas a length-scale (wavelength, λ) that is bigger than the turbulence scale (e.g. Crighton[3]):
λ
L∼ 1
M
Thus if our computational domain is to include about a wavelength of the radiated sound,then our estimate for total computational resources is increased to:
number of operations ∼ N4 ∼ Re3L
M4
and, like high Re, it is simply not feasible to compute any significant portion of the acousticfield for small M (e.g. underwater acoustics).
Such a compact source description is not always appropriate at high subsonic to super-sonic flow conditions, but more detailed analysis [2] reveals that the acoustic wavelength is
5

still much longer than the turbulence integral scale at high subsonic Mach number. For alaboratory scale turbulent jet with M = 0.9 (unheated) for example (Figure 1), it can beestimated that the acoustic wavelength corresponding to the peak radiated frequency at 30degrees to the jet axis is about 20 times the integral scale two diameters downstream of thenozzle. For sound radiated to 90 degrees, the wavelength to integral scale ratio is about 10times the integral scale. The integral scale is approximately equal to the shear layer thicknessat this streamwise position, and thus even at M = 0.9, there is still a large mismatch thatrequires an extensive computation domain to resolve a portion of the radiated sound.
Just as the range of length scales associated with turbulence drives us to consider turbu-lence models, the acoustic inefficiency and wavelength mismatch drive us to consider whetherwe can somehow compute the turbulence with DNS at low Mach number (perhaps even withincompressible flow equations) and then use equivalent sources from acoustic analog theories(e.g. Lighthill) to compute, independently, the far-field sound. In many flows including jets,the acoustic waves themselves have no significant effect on the flow itself, and such a splitseems reasonable. This is the basis then of so-called hybrid methods for CAA, which arediscussed in more detail in subsection 1.3.3.
1.2.3 Boundary conditions (BC) and inflow forcing
Another complication with directly computing a flow together with its radiated sound is theneed to impose BC that accurately reflect the physics of the flow. Often, only a portion of arelevant flow can be computed, for example the portion of a turbulent jet downstream of thenozzle lip, but only extending to perhaps 12 diameters downstream in the fully developedportion of the jet. Outflow BC are then required at the downstream boundary that allowturbulent flow structures to leave the domain. It is essential (and nontrivial) that this occurwith producing acoustic reflections that could be larger than the flow generated sound.Similarly, at upstream and normal boundaries, we must allow the acoustic waves in thedomain to cleanly exit without producing sizable reflections that would contaminate thecomputation. Such nonreflecting and outflow BC were in fact a pacing item in CAA formany years, and even though several accurate techniques are now available, they can bedifficult to use in practice. The entire issue of BC is therefore discussed in greater detail inanother lecture in this series.
An additional issue arises at the inflow boundary in the above example. There areeither turbulent or laminar boundary layers developing inside the nozzle upstream of thecomputation. For the former case, we would need to specify some fluctuations at the inflowboundary that suitably approximate the true turbulent fluctuations. Of course, if it werea simple matter to “make up” accurate turbulence fluctuations than the whole topic ofturbulence modeling would a simpler matter (which it is not!). Indeed, the issue is genericto DNS of turbulent flows in general, and a variety of techniques have been developed.While it is beyond the scope of these notes to describe these, we note that they involveforcing the flow with disturbances through the inflow boundary, or perhaps in a small regionjust upstream of the “physical” portion of the computational domain (e.g. [4]). In eithercase, it is important that these fluctuations are specified in a manner such that they do
6

not act as spurious sources of acoustic waves. For a region, one can require the imposedfluctuations to be divergence free, and this greatly lessens any sound produced directly bythe forcing. It should also be noted that there will exist a development length over whichthe inlet forcing relaxes to a more realistic turbulent flow. This portion of the computationneeds to be “sacrificed” in the sense that the flow will not be physical in this region.
A somewhat more computationally intensive method of specifying inflow disturbancesis to “feed” results from another turbulence simulation through the inflow boundary. Forexample, Freund [5] computed turbulence in a periodic annular mixing region to obtainaccurate turbulence fluctuations with a set boundary layer thickness to generate a databasethat could be used to excite the inflow of a corresponding spatially evolving jet.
For laminar incoming boundary layers (and these can exist even at high Reynolds numberswhen the nozzle contraction ratio is large), the specification of inflow is considerably simpler.There is a caveat, however. Computations tend to be “quieter” than experiments in the senseof external disturbances. If laminar upstream boundary layers are not seeded with (small)disturbances, they can obtain unnaturally long laminar runs (with low flow spreading rate)before transitioning to turbulence. For the jet, for example, this results in an unrealisticallylong potential core. Thus inlet perturbations are typically added at or near the inflowboundary in order to excite natural instabilities in the initially laminar shear layer. Often it isuseful to use eigenfunctions from linear stability theory as the form of these seed disturbances.
1.2.4 Domain extensions for far-field sound
At progressively larger distances from the near-field unsteady flow region, fluctuation levelsare decaying and at a certain distance nonlinear effects become negligible (except for radiatedweak shock waves). At this point, pressure fluctuations are generally governed by a linearwave equation (provided that there is at most uniform flow or something close to it outsidethe source region). A corollary of the wave equation is that in this far-field region, theacoustic waves at any point may be expressed in terms of an integral of the the time historyof the pressure on a surface surrounding all sources. Such a Kirchhoff Surface thereforeallows the flow computation to be truncated at a point where fluctuations become linear2.
The methodology can be carried out in two ways. Linearized equations (linearized Eulerequations or their reduction to a wave equation) can be discretized on a grid surroundingthe flow computation grid, with data from the flow computation specified along the common(Kirchhoff) surface. More traditionally, an integral formulation of the wave equation is usedand evaluated with numerical quadrature. Brentner [6] discusses some of the common sourcesof error in such quadrature.
Sometimes it is not possible to define a closed surface around all the sources, for examplewhen a computational domain ends with unsteady flow passing through an outflow BC.Errors will be incurred if the surface is drawn through the flow (which obviously does notsatisfy the wave equation) [7, 8], or if it left open [9]. An alternative is to use an integralformulation due to Ffowcs Williams and Hawkings (Ff-H) [10, 11] that has been shown
2This assumes that an accurate BC for the flow solver can be posed at this surface, as discussed insection 2.9
7

in certain cases to retain accuracy even when the boundary is drawn through a nonlinearflow region. Note that the Ff-H surface is also used in connection with hybrid methods asdiscussed below.
1.2.5 DNS Examples
Before turning to modeling issues in the next subsection, it is useful to present a brief resumeof those flows that have and are being computed with DNS discussed in this section. Herewe include only those computations where the noise was directly captured in the simulation,and for which no turbulence or noise source models were used (those issues are discussed insection 1.3. These flows fall into two categories, depending on the level of physical realism.In the first category are model problems, often two-dimensional, which may be physicallyunrealizable but which can be used to address fundamental issues of aeroacoustic theory, or toprovide benchmark problems for development of future algorithms. In the second are actualturbulent flows computed by DNS which can be directly validated against experiment andused as databases for modeling studies. This list is meant to be illustrative, not exhaustive.
• Model problems:
1. Interaction of vortices, including co-rotating vortices [12], collisions of vortex rings[13].
2. Vortex pairing in mixing layers [14, 15] and jets [16] and with mixing layer withadjoint-based control [17].
3. Mach wave radiation from supersonic jets [5, 18, 19, 20].
4. Shock vortex interaction [21, 22, 23, 24, 25, 26].
5. Jet screech and shock-associated noise [27, 28]
6. Flow over open cavity [29, 30, 31, 32]
• Turbulent flows:
1. Jet [5, 4]
2. Vortex ring [33]
1.3 Turbulence and acoustic source modeling
1.3.1 Turbulence modeling
As discussed in the last section, it is presently impossible to simulate flow at high Reynoldsnumber using DNS. Alternatives to DNS include Large Eddy Simulation (LES) and ReynoldsAveraged Navier-Stokes equations RANS. LES takes the approach of filtering out scalesbelow a cutoff, ∆, in equations of motion, whereas RANS takes the approach of averagingvelocities and other flow quantities over a long time, or over a large ensemble of realizations.Both LES and RANS result in an unclosed term in the resulting equations that cannot even
8

in principle be exactly recovered from the remaining filtered or averaged variables. A widerange of models are available that provide this Reynolds or Leonard stress, in the case ofRANS and LES, respectively. It should be noted that when the LES equations are solvednumerically, the scale cutoff ∆ must be at a minimum the grid spacing, ∆x. However,the dynamics of these smallest computed scales is not correct owing to truncation error.Whether or not ∆ is made larger than ∆x depends on the particular model employed, butregardless of this, it should be assumed that the smallest motions represented on the grid(and in particular their sound radiation) are effected by discretization errors.
There are obviously complex issues and trade offs involved in choosing a particular clo-sure. The main objective of this section is to acquaint the student with those CAA issuesthat arise above and beyond the normal requirements and capabilities of the models. Thesehave principally to do with three inter-related issues:
1. Whether any of the sound generation process is “directly” captured by the modeledequations
2. Whether an additional model (above and beyond the closure) can be supplied to modelthe missing acoustic sources
3. Whether the closure model leads to unphysical acoustic radiation
RANS in its simplest form seeks the time-averaged flow field and thus resolves no acousticgeneration or radiation, except possibly stationary Mach waves in supersonic flow. Therethe issue turns completely to modeling of the acoustic source in terms of the mean flow andwhatever statistics are represented by the model, usually the turbulence kinetic energy, kand the dissipation, ε. LES, on the other hand, resolves the energetic (large) scales of motionand presumably captures with that some portion of the radiated sound. Sound radiationfrom small scales is missing, although without further analysis it is unclear what portionof the total acoustic spectrum this might represent. Further details about this are givenbelow. The final issue about whether the closure leads to nonphysical noise sources hasreceived comparably little attention in the literature. It can be shown that they do representequivalent sound sources in a traditional acoustic analogy framework (Lighthill) [34], andsome estimates for acoustic output of the SGS terms have been made for isotropic turbulence[35, 36]. On the other hand, several existing LES models seem to show good correspondencebetween the resolved portion of the acoustic spectrum and experiment or model spectra.This agreement suggests that at least with the particular models employed, direct radiationfrom the SGS models is not a major contributor to the overall sound.
For the case of a turbulent jet it is possible to make estimates for what portion of theacoustic spectrum would be resolved for a particular LES grid resolution [2]. Using anempirical model of the three-dimensional energy spectrum, Lele estimates that over theinertial range, the typical eddy frequency scales like:
f
fo
∼(
Lo
L
) 23
9

where f is the frequency, L is the length scale of the eddy, and Lo and fo are the length scaleand frequency of the integral scale (peak in energy spectrum). For example if LES places32 points per integral scale, then we can resolve frequencies relative integral scale to the upto 32
23 ≈ 10. With 128 points, this goes up to around 25. However, this assumes that the
eddies are well-represented all the way to the grid-scale, which as noted above is not thecase in an actual computation. Better estimates reduce 10 and 25 to 5 and 13, respectively,when high-order-accurate numerical methods are used [2]. Note also that the estimate is fora single integral scale. A typical computation would involve a flow region many times theintegral scale in extent.
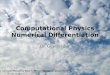
A nice illustration of the analysis is provided in the work of Bodony and Lele [37] and isreproduced in figure 2. The impact of using finer resolution in LES is to fill in a portion of the“missing” spectra This higher-frequency sound that is difficult to resolve can be important in
St10-2 10-1 100
40
60
80
100
SPL
Figure 2: Predicted far-field noise spectrum from LES of an unheated, Mj = 0.9 jet byBodony & Lele [37]; LES with 106 points; LES with 105 points; Empiricaljet noise spectra from Tam. Figure reproduced from [2] with permission from Elsevier
applications, particular in jet noise where metrics like “Perceived noise level” are used thatpenalize the high frequencies that people find most annoying. Thus even with LES, it may benecessary in some applications to supply a model for the “missing” sound generated by thesmallest scales. Efforts toward that goal are being made by several groups [38, 39, 40, 41].
1.3.2 Noise source modeling
Aside from noise source models for SGS terms in LES, the development of more generalmodels characterizing the acoustic sources in turbulent flows remains a important goal,especially in the context of employing RANS to supply mean velocity, turbulence kineticenergy and dissipation as inputs to the models. Available codes include the JeNo (forJet Noise) and MGBK software developed at NASA Glenn Research Center [42]. Thesemodels generally seek to represent the two-point, two-time correlation functions needed tostatistically model the Lighthill source.
Without delving into the details, it is worth mentioning an important application of DNS(and perhaps LES) results in this context. That is in providing a detailed database of boththe turbulent fluctuations and the far-field sound that can be used to examine statistical noisesource models. The statistics required for the noise sources are quite difficult to measure
10

experimentally, especially in high speed flows. Indeed, Freund [43] has used his simulationsof the M = 0.9, Re=3600 turbulent jet to examine in detail statistics associated with thecorrelation functions. Even though the Reynolds numbers reached in simulation are low,some correlations derived from the data may hold at much higher Reynolds number [43]
1.3.3 Hybrid methods
Especially for low Mach number flows, it is advantageous to develop methods that do not di-rectly capture the radiated sound but instead rely on a second calculation, or post-processingstep, to predict the noise. In some cases this step may be carried out concurrently with theflow simulation, but generally by hybrid methods we mean ones for which the flow fielditself is evolved independently of the acoustic radiation. Two related approaches have beendeveloped and are summarized in figure 3.
VKI Lecture Series 44Tim ColoniusCaltech
Hybrid Methods (II)
Flow ComputationCompressible/Incompressible
DNS/LES
Acoustic AnalogyEquivalent
Source
EquationSplitting(singular
Perturbation)
Directsolution onoverlapping
FD mesh
Green’s Functionsolution of
wave equation
Secondary AcousticComputation
Figure 3: A guide to hybrid methods
Acoustic-analogy-based methods The equivalent sources for an acoustic analogy arecomputed from data from DNS or LES simulations of the turbulent near-field region. Anyacoustic analogy can in principle be used, including Lighthill [44], Lilley [45], recent gener-alized acoustic analogies by Goldstein [46]. The wave operator (for example in Lighthill’sequation) is then inverted either in integral form with an appropriate Green’s function, orby direct finite-difference solution. For low Mach number, it is usually appropriate to makecompact source assumptions in evaluating the Green’s function integrals, and this can beimportant numerically since small quadrature errors could in principle prevent appropriatequadrupole cancellations.
While these methods are most effective for low Mach number flows, where the acousticCourant constraint requires tiny time steps, they can in principle be applied to higher Machnumbers, provided of course that compact source assumptions are relaxed. However, onemust evaluate whether it makes sense to do so, since a direct computation that resolves thesound generation at moderate subsonic Mach number may be less expensive and prone to
11

error. No general analysis has been done to determine at which Mach number one approachbecomes less expensive than the other. Incompressible solvers typically involve iterations ona Poisson equation to determine the pressure (i.e. to satisfy the divergence-free constraint),which must be balanced against the larger number of variables and smaller time-steps of acompressible solver. For example, a fully compressible flow solver at M=0.5 together witha highly stretched mesh near the far-field boundary would probably be competitive with anincompressible flow solver in terms of total computational time required.
As a practical matter it is necessary to ensure that the equivalent source terms decaysufficiently towards the computational boundaries. In cases where outflow of organizeddisturbances from the flow domain elevates the source-terms to a significant level at theboundary, it is necessary to adequately treat this aspect, since frozen convection of a dis-turbance at subsonic speed either into or out of the computational domain should not be asource of sound [47].
The choice of Green’s function depends on the particular left-hand-side linear operator,examples:
1. The standard wave equation (e.g. Lighthill). The flow outside the domain must bequiescent or uniform flow (with a change in reference frame). Refractions effects in thenear field are “lumped” in with the acoustic sources.
2. The third-order wave equation for parallel shear flows (e.g. Lilley). The base flowis a parallel shear flow and the wave operator includes effects of refraction consistentwith that flow. Any refraction due to sound interaction with more general velocitygradients is lumped in with the acoustic source. If the parallel flow is inflectional, thenunbounded instability waves (i.e. Kelvin-Helmholtz) will also be a solution. These canlead to numerical difficulties or ambiguities in evaluating the sound and a variety ofmethods are being developed to suppress the instability-wave solution [48, 49, 50, 51].
3. Generalizations to more general (non-parallel) base states that result in the LinearizedEuler Equations (LEE) [48, 49] or other operators [46, 52] on the left-hand-side of theacoustic analogy. If mean flow spreading is included in the operator, the instability-wave solution is bounded and can be taken as a particular solution driven by thesources [53].
The Green’s function is obtained by replacing the right-hand-side source with a deltafunction and finding a solution to the left-hand-side operator. The Green’s function is thenconvolved with the right-hand-side source. Beyond this, there are additional issues andchoices that arise in finding the Green’s function:
1. If there are solid surfaces, then a Green’s function that satisfies appropriate acousticBC on these surfaces can be used. In this case the convolution will be an integral overthe volume including the sources.
2. A free-space Green’s function may be used in which case convolution will be an integralover the volume and apparent sources on the solid surfaces.
12

3. The Ffowcs Williams-Hawkings approach [10] may be used wherein a generalizedGreen’s formula is used to express the solution to the wave equation in terms of sur-face integrals over the body-surfaces immersed in the flow, integrals over other surfacesneeded to enclose the integration domain, and volume integrals over the volume sourcedistributions, see general derivation in Crighton et al. [54]. A review of this method,particularly from a viewpoint of use with CAA, has been provided by Lyrintzis [7].
4. An adjoint formulation (Tam & Aurialt [55]) can be used where the role of source andobserver in the acoustic field are interchanged so that the Green’s function is found bysolution of a scattering problem rather than a source problem. When the left-hand-sideoperator is the linearized Euler equations, this can lead to a computational advantageas it reduces the number of Green’s functions that must be found from 3 to 1 [55].
Incompressible/acoustic split Several groups (e.g. [56, 57]) have proposed computationalmethods for predicting the radiated noise without an explicit use of an acoustic analogy. Thegeneral idea of these methods is to compute the unsteady flow responsible for the noise withincompressible equations and then overlay a simplified set of compressible flow equations topredict the radiated noise. The derivation of these methods lacks full rigor since the singularperturbation of the compressible equations [58, 3], in the limit of small Mach numbers, isnot recognized in the derivation. It is interesting that Goldstein’s [46] generalized acousticanalogy may provide a framework useful in rationalizing methods that invoke a split betweenthe flow and the acoustic variables.
1.3.4 Summary and research directions
The computational approaches discussed above are summarized in graphical form in figure 4.All elements of this matrix of methods are currently being developed by researchers in CAAand represent important unit problems in attacking noise prediction generally.
The only completely unambiguous way to predict sound radiated by turbulent flow isby DNS, which as discussed here is restricted to sufficiently low Reynolds number so thatpractical engineering problems cannot be solved. This motivates modeling approaches forboth the turbulence (LES,RANS) and the acoustic sources, or that portion of them that isnot directly resolved by the flow computation.
The development of these models is likely to drive a majority of work in CAA in theyears to come. However, we see a strong role for employing DNS and LES of simpler, lowerReynolds number flows–both model problems and full-blown DNS of turbulence. A summaryof conclusions drawn from recent DNS computations is provided by Colonius & Lele [2]. Wesummarize the sorts of issues that DNS and LES can help resolve here.
1. Study simple model flows to try to learn how flows generate sound
2. Study canonical turbulent flows in order to measure equivalent sources for acousticanalogy, perform a priori tests of modeled sources in order to validate assumptionsand approximations therein
13

RANS/URANS
Hybridmethods
(DES, NLDE)
DNS
LES
VortexMethods,
Reduced-orderModels
No
Yes
No
Yes
!No
Yes
!
SubgridModel?
TurbulenceModel?
Subgridnoise
sourcemodels?
Empiricalnoise
sourcemodels?
Yes
No
Extractacousticsources?
NoDomain Extension(Kirchhoff/Ff-H,
direct far-field, equationset matching, etc)
Yes
Flowparameters,geometry
AcousticAnalogySources
Lighthill(integral or differential)
LilleyGeneralized
SolutionMethods• Green’s function(wave eq.)• Differential (wave eq. or LEE)• Adjoint Green’sFunction (LEE)
Scaling Laws
!
Implicit sub-grid model
Implicit sub-grid model
Flow computationmust be
compressible
NoisePrediction
InflowExcitation
Model
ProblemSetup
Acoustic SourceModeling
TurbulenceModeling
Flow computation Acousticcomputation
Figure 4: A hierarchy of noise prediction methods. Reprinted from [2] with permission fromElsevier.
14

3. Provide data for turbulence correlations related to aeroacoustic theory
4. Provide benchmarks against which hybrid/modeled methods may be compared
2 Numerical Methods
A variety of accurate and robust numerical methods have been developed for sound genera-tion and propagation propagation problems. As discussed above, acoustic inefficiency givesrise to waves whose amplitudes are small compared to near-field fluctuations; these wavesmay also need to propagate over substantial distances within the flow. Two key features ofmost CAA discretization schemes are therefore (i) high-order-accurate and optimized schemessuch that the solution is adequately resolved with as few grid points as possible, and (ii) lownumerical dissipation (or artificial viscosity) such that waves are not adversely attenuated.These same features also fulfill the requirements necessary of a good discretization schemefor DNS and LES where a range of scales need to be resolved, it is advantageous to usehigh-order-accurate methods.
The present notes are an attempt to give the basic rationale for high-order-accurate andoptimized methods in CAA, and to discuss some of the issues that arise in implementingthem. For a more detailed account of these issues, see [2]. The 4 workshops on bench-mark problems in CAA that have been sponsored by NASA [59] also provide a wealth ofinformation regarding current practices and issues in CAA.
Other things being equal, the best choice of discretization for a given geometry and accu-racy requirement is the one that is most computationally efficient, i.e. the one that requiresthe smallest computing time for a given error tolerance. Other factors that determine thebest choice of method include ease of implementation (and especially imposition of BC),efficiency of parallelization, memory requirements, and the potential for straightforward im-plementation in different geometries and flow configurations. The trade-offs between theseissues have generally favored finite difference (FD) methods (especially high-order-accurateand optimized methods), but a variety of other methods are also useful. In particular, spec-tral (or pseudo-spectral) schemes are useful for flows possessing one or more homogeneousdirections, combined with a finite-difference or alternative discretization of the inhomoge-neous direction. Round jets, for example, are naturally described in cylindrical coordinatesand Fourier-spectral methods for the azimuthal direction is a good choice. Spectral methodsare generally efficient (more so than the schemes discussed below) for these cases. However,their implementation in inhomogeneous flow directions with BC discussed in section 2.9is not advised. Finite element and spectral element methods have been developed for thecompressible Euler and Navier-Stokes equations, particularly the Discontinuous Galerkin(DG) method (e.g. [60]) has been examined by a number of investigators for CAA problems[61, 62, 63, 64, 65, 66, 67, 68]. Finite-volume schemes on grids where fluxes are staggeredwith respect to the conserved variables are also attractive schemes for CAA, and staggeredschemes for spectral element [61] and finite difference [69] discretizations have recently beenextended to compressible flows. Such schemes confer an advantage especially in LES calcu-
15

lations, in that they can be arranged to admit a discrete integral conservation law similarto the continuous equations. Vortex particle methods, either together with acoustic analogy[70, 71], or with recent extensions to compressible flow [72] can also be used in aeroacous-tic computations. Flows involving shock waves require special attention, and their spatialdiscretization will be discussed in a subsequent lecture (Pirozzoli) in this series.
2.1 Finite-difference schemes
FD schemes have been used for a majority of problems in CAA, which stems from theirflexibility and ease of use on structured grids, as well as their ability to extend to high-order-accuracy with little additional complication. A centered FD scheme for the first derivativeon a uniform mesh is written:
Nα∑j=1
αj
(f ′i+j + f ′i−j
)+ f ′i =
1
h
( Na∑j=1
aj
(fi+j − fi−j
))+ O(hn). (2)
The independent variable at the nodes is xi = h(i − 1) for 1 ≤ i ≤ N , and the functionvalues at the nodes are fi = f(xi), and the values of the derivative are f ′i = ∂f
∂x(xi). The
stencil refers to the maximal number of points required to compute the derivative at a pointj (max(Na, Nα)) and a centered scheme is one for which the stencil extends equally to the leftand right of the point j. Biased or upwind schemes are similar but have a unique coefficientaj and αj for each −Na < j < Na and −Nα < j < Nα, respectively.
If Nα = 0 then the scheme is called explicit. Implicit schemes (also Pade or compact FD),by contrast, have Nα 6= 0 and require the solution of a system of equations to determinethe derivatives of all nodes 1 ≤ i ≤ N simultaneously. Provided Nα = 1 or 2, efficientschemes for finding the solution of the resulting tri- and penta-diagonal matrices can beused. Conventionally, the coefficients αj and aj are chosen to give the largest possibleexponent, n, in the truncation error, for given stencil width (i.e. choice of Nα and Na). ByTaylor series expansion of Equation (2), the maximum possible exponent is given by:
nmax = 2(Na + Nα), (3)
provided that Na ≥ 1. Table 1 gives coefficients for several centered schemes that have beenused in CAA studies.
The leading order error term in Equation (2) is a measure of the actual error for asymp-totically small h and also involves high-order derivatives of the underlying function. Othermeasures of the error can be more instructive, in particular wave propagation errors discussedA natural way to investigate the wave propagation characteristics is through a Fourier mod-ified wavenumber analysis. Fourier analysis of numerical approximations to PDE dates backto the 1940s and the pioneering work of von Neumann. The analysis is strictly applicableonly to systems with periodic BC, but this is not a serious limitation since we can usuallyinterpret the results as applying locally in a given non-periodic problem. If a domain oflength L is discretized with N uniformly spaced points on x ∈ [0, L) (with h = L
N), the
16

Scheme α1 α2 a1 a2 a3 Order (n)E2 - - 1/2 - - 2E4 - - 2/3 −1/12 - 4E6 - - 3/4 −3/20 1/60 6C4 1/4 - 3/4 - - 4C6 1/3 - 7/9 1/36 - 6
DRP - - (496− 15π)/42c (1725π − 5632)/84c (272− 85π)/14c 4LUI See caption 6
Table 1: Coefficients of explicit second, forth, and sixth-order schemes,compact forth andsixth order schemes, and the optimized schemes of Tam & Webb [73] (DRP; where c =45π − 128) and Lui & Lele [74] (LUI; where the constants are: α1 = 0.5381301488732363,α2 = 0.06663310123881123, a1 = 1.367577724399269/2, a2 = 0.8234281701082790/4, a3 =0.018520783486686603/6)
discrete Fourier transform (DFT) of f (denoted by f) is:
fj =1
N
N∑m=1
fie−ikjxm , j = −N/2, · · · , N/2− 1 (4)
where the wavenumber is kj = 2πj/L and xm = (m− 1)h. The inverse transform is
fm =
N/2−1∑j=−N/2
fjeikjxm , m = 1, · · · , N (5)
It may be shown that the jth component of the DFT of ∂f∂x
, denoted f ′j is simply ikj fj.
Taking the DFT of Equation (2) gives the approximate value of f ′j, which we denote (f ′j)fd,as:
(f ′j)fd = iK(kjh)fj (6)
where
K(z) =
∑Na
n=1 2an sin (nz)
1 +∑Nα
n=1 2αn cos (nz)(7)
is the so-called “modified wavenumber.” Note that kjh takes on values between −π and π asj varies between −N/2 and N/2. For kjh = π, the period of the wave is 2h (and, generally,the number of points per wavelength, Nλ, is 2π
kj). Higher wavenumbers cannot be represented
on the grid, and their energy is aliased onto the resolved wavenumbers.Modified wavenumber curves are plotted in Figure 5 for the FD schemes of Table 1. Exact
differentiation would result in a modified wavenumber relation K(z) = z. The error betweenthe exact and modified wavenumber, ε(z) = (K(z)− z)/z is also plotted in Figure 5. For agiven error, we can estimate the required number of grid points per wavelength required fora given scheme (kjh = 2πjh/L). As the desired error is reduced, low-order schemes requiresignificantly larger numbers of grid points per wavelength.
17

0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
kh / π
K (
kh
) /
πE2E4E6DRPC4C6LUI
10 100
10 -5
10 -4
10 -3
10 -2
10 -1
10 0
2N λ
| ε (k
h) |
E2E4E6DRPC4C6LUI
Figure 5: The modified wavenumber (left) and the relative error between the exact andmodified wavenumber (right). Reprinted from [2] with permission from Elsevier.
2.2 Dispersion and dissipation
When used in linear hyperbolic PDE, FD schemes admit a simple interpretation in terms ofmodified wave propagation characteristics. A useful toy model that demonstrates most ofthe effects is the advection equation:
ut + cux = 0. (8)
where c is a constant with units of speed, and the equation admits simple waves with u =u(x − ct). When the one-dimensional Euler equations are linearized about a constant baseflow, they can be decoupled into a system of equations of the form of Equation (8). On infiniteor periodic domains, the solutions of Equation (8) may be decomposed into their Fouriercomponents in both x and t. That is, we set u(x, t) = ueikxe−iωt + c.c. Then nontrivialsolutions to Equation (8) may only be obtained when the dispersion relation:
ω = ck (9)
is satisfied. Since all Fourier components of the solution travel with the same constant phasespeed, ω
k= c, waveforms comprised of a superposition of modes retain their shape as the
propagate, and are therefore called non-dispersive. There is no physical viscosity and wavesare not attenuated (dissipated). If a finite-difference scheme is used in Equation (8), weobtain a modified dispersion relation:
ωh
c= K(kh) (10)
and the phase speed of disturbances is now given by:
cp
c=
ω
ck=
K(kh)
kh(11)
18

Different Fourier components travel with different phase speeds and such a system is termeddispersive, since the waveform will be altered as the wave propagates [75, 76]. Groupsof waves with Fourier components whose wavenumbers are near k propagate at the groupvelocity,
cg
c=
1
c
∂ω
∂k= K ′(kh) (12)
where the prime denotes differentiation with respect to the argument, kh. Group velocitiesfor FD schemes are shown in Figure 6. An important feature of the plot is that, for a givenfrequency, there are now two discrete waves. The one with the long wavelength correspondsto the physical or smooth solution in the limit of h → 0. The one with short wavelengthhas no physical counterpart and is termed a spurious wave. In physical space, these wavesappear as “wiggles” in the contours or “sawtooth” on a line plot.
0.0 0.2 0.4 0.6 0.8 1.0-4
-3
-2
-1
0
1
kh / π
c g /
c E2E4E6DRPC4C6LUI
Figure 6: The group velocity for several FD schemes. Reprinted from [2] with permissionfrom Elsevier.
An important observation from Figure 6 is that the spurious waves propagate in an oppo-site sense to the physical waves. Upstream propagating spurious waves may readily be seenin supersonic flow computations even though all wave motion is (physically) downstream.We can define two useful quantities from the figure as well. The first is kc which is thewavenumber beyond which waves are spurious, and ωc which is the maximum frequencythat can be propagated on the mesh. It is important to notice that kch 6= π.
Amplitude at a particular wavenumber is dispersed, but with the centered FD, there isstill no attenuation of a given Fourier component. Wave “energy” is conserved. By contrast,when biased FD schemes are used, the modified dispersion relation will result in complexfrequencies, ω. If a scheme is appropriately “upwinded”, meaning the stencil is biased inthe direction of positive c, then the imaginary part is negative and waves are attenuated ordissipated as they propagate. If the scheme is “downwind” biased, ωi is positive and thesolution blows up. Thus only upwind FD schemes are permitted generally. In systems of PDE
19

that can have propagation velocities in different direction, this requires that the variablesbe approximately decoupled into “upstream” and “downstream” components before theycan be differenced. Various upwind schemes have been considered for CAA applications(e.g. [77, 78]). A drawback of upwind schemes is that there is significant dissipation of thehighest resolved wavenumbers that can only be reduced by increasing the stencil size.
2.3 Optimized schemes
The coefficients of the FD scheme discussed above were chosen to give the lowest trunca-tion error, asymptotically for small h, via a Taylor series expansion. For finite grid size,h, it is also possible to reduce the error in the modified wavenumber by optimizing thecoefficients. Typically some of the coefficients are still chosen to give a particular order-of-accuracy by Taylor series expansion, and the remaining coefficients to reduce error in themodified wavenumber. Lele [79] and Lui & Lele[74] derived optimized schemes by requir-ing the modified wavenumber to be equal to exact differentiation at certain wavenumbers.Tam and Webb [73] derived “dispersion-relation-preserving” (DRP) schemes by minimizingthe integral of the error in modified wavenumber with respect to the remaining coefficients.Coefficients for the optimized schemes are given in Table 1 and modified wavenumbers andgroup velocities plotted in figures 5 and 6, respectively.
Recently, Pirozzoli [80] has extended the idea of optimized schemes to consider optimallyefficient schemes, in the sense of minimizing the computational cost of achieving a particularaccuracy goal. These schemes are discussed below in the context of computational efficiency.
2.4 Spurious waves, artificial viscosity, and filtering
As discussed above, centered FD schemes yield two solutions for the wavenumber for a givenfrequency: the small wavenumber smooth solution has propagation characteristics similar tothe underlying PDE, while the high wavenumber (near π) spurious solution propagates witha group velocity of the wrong sign. In a computation, spurious waves may be produced inseveral ways:
1. Initial conditions (IC). Any energy at wavenumbers kh > kch present in the initialcondition will propagate as spurious waves. For this reason, it is preferable to start witha well-resolved initial condition. In practice, however, it may be difficult to constructand there will inevitably be unphysical initial transients as the specified IC relaxesto an approximate solution of the governing equations. For some simple flows likevortices, vortex rings, etc., an approximate steady laminar solution can often be foundthat minimizes such transients. In other cases, it is possible to use filtering or artificialviscosity at early stages to remove poorly resolved waves.
2. Nonlinear cascade to small scales in DNS and LES. The nonlinear terms in thegoverning equations naturally produce finer scales (higher wavenumbers). In a DNScalculation, physical viscosity should be the only mechanism that supplies dissipation
20

to the small scales. The presence of spurious waves in DNS calculations, therefore, isan indication of poor resolution. While artificial dissipation can be used to eliminatethem, it imposes, in essence, a grid-dependent turbulence model. For LES, the effectsof spurious waves are not well understood at present. Typically, the “resolved” partof the energy spectrum is defined to be all kh < π, and the information from all thesescales is used to determine the magnitude of subgrid-scale dissipation. An interestinganalysis of the problem is presented by Ghosal [81].
3. Shock waves and nonlinear steepening of waves. The internal structure of theshock wave is, except for very weak shocks, on the order of the mean free path and itis never possible to resolve it directly on the mesh. Unless appropriate shock capturingmethods are used the shock wave will result in severe generation of spurious waves thattypically lead to instability and the generation of negative temperatures or densities.On the other hand, shock capturing methods can be unacceptably dissipative, so anappropriate balance must be made. Some preferred methods for handling shock wavesare discussed in another lecture in this series (Pirozzoli).
4. Grid stretching, generalized coordinates, and/or overset grids. These featuresof practical codes couple the smooth and spurious wavenumber solutions. Modifiedwavenumber analysis [2] can be used to determine ways to minimize spurious waves.
5. Boundary closures/boundary conditions. Boundary closures and boundary con-ditions, both discussed below, lead to coupling of smooth and spurious waves and greatcare must be taken to minimize the generation of spurious waves near boundaries
With the exception of boundary closures, all of the aforementioned processes generatespurious waves due to insufficient resolution of relevant length scales in a given problem.We discuss now some ways in which they may be suppressed, but we must recognize at theoutset we are on shaky ground in doing so. If we are not resolving all the scales then weare no longer finding a converged solution to the governing equations, and in this sense weare no longer in the realm of DNS, but rather we are introducing a turbulence model aboveand beyond any physical model (e.g. LES, RANS) that we may already have introduced.Techniques to suppress spurious waves are typically based on either:
1. Artificial viscosity introduced by using upwind schemes (e.g. [77, 78]).
2. Explicit artificial viscosity terms added to the governing equations (e.g. [82, 83]).
3. Filtering the numerical solution at discrete time intervals (e.g. [84, 85]).
The aforementioned references are given as examples, see [2] for a more complete discussion.In summary, artificial dissipation, artificial viscosity, and filtering of the dependent vari-
ables may all be used to control the generation and growth of spurious waves. In nonlinearcalculations, such schemes amount to ad hoc turbulence models (or shock-capturing schemes).It is preferable to use mesh refinement, higher-quality grids, and higher-quality BC, etc. asa first line of attack.
21

2.5 Boundary closures
The FD stencil, Equation (2) cannot be applied to points closer to the computational bound-ary than max(Na, Nα) grid points away. In order to compute the derivatives near the bound-ary, one or several special FD formulas must be developed to close the set of discrete equa-tions, say for the first derivative (e.g. [79, 73]). These boundary closures as we call themhere are related, sometimes in a complicated way, to the more general issue of posing physi-cal (and ultimately discretized) BC for the equations being solved (e.g. Navier-Stokes), seeFigure 7. The common approach is to ignore this relation, but this can lead to complications.
Tim ColoniusCaltech
VKI Lecture Series: Computational Aeroacoustics
10
Boundary closure2
ContinuousEquations
(e.g. Navier-Stokes)
Continuous Boundary Conditions
Discretized boundaryConditions, TimeMarching scheme
Interior pointsFD formulae,
Time marchingscheme
Closed setof discrete equations
Boundary/near-boundary
FD closures
Well posed?
Stable?
Figure 7: Coupling of BC and boundary closures
The standard approach is to decouple the boundary closure from the (physical) BC. Spe-cialized biased (upwind/downwind) schemes for the boundary and near boundary nodes arederived. Second, any derivatives normal to the boundary that appear in the (continuous) BCare replaced with one-sided differences. Near-boundary nodes are treated with the interiorequations and derivatives are approximated with one-sided or biased schemes. Decouplingthe BCs and boundary closures can lead to instability in the final system of discrete equa-tions. There are two types of stability that can be important [86]: Lax stability determineswhether the solution remains bounded as the mesh size ∆x → 0 at a fixed time, and thesecond is that the error does not grow without bound in time. The G-K-S theory [87] showshow Lax stability can be analyzed in terms of normal modes on semi-infinite or finite do-mains. Requiring that the error does not grow without bound in time requires asymptoticstability, which for the semi-discrete case implies that there can be no eigenvalues of thespatial discretization operator in the right half of the complex plane (or on the imaginaryaxis in the degenerate case). Carpenter et al. [88] have stressed the desirability of havingschemes that are both Lax and asymptotically stable.
In the simplest example, Equation (8), one can derive suitable boundary closures andcheck the system of linear ODEs for asymptotic stability (e.g. [79, 89]). Eigenvalues must befound numerically, for a specif grid size, but it is not usually difficult extrapolate results tolarger grids. It can be difficult to retain both high accuracy and stability near the boundary.
22

In many problems, there are uncertainties or other errors near the boundary, and accuracyis usually deemed of secondary importance to stability. This is especially true when bufferlayers (see Section 2.9.5) are used. If the governing PDE is sufficiently simple (e.g. scalaradvection in multidimensional problems) It is also possible to derive stable closures (bothLax and asymptotic) directly [88, 90, 91, 92]. Generalizations of this approach include one-dimensional systems of nonlinear equations [93] and generalized curvilinear coordinates formultidimensional, scalar, linear hyperbolic equations [94]. Further generalizations may bepossible possible. However, it should be noted that for even the linearized Euler equationsin 2 or 3 dimensions, the specification of BCs is considerably more complex than in thesesimple examples. Finally, an alternative approach to the boundary closure/stability problemthat we call discretely nonreflecting BC and are discussed in Section 2.9.
2.6 Time marching schemes
Thus far we have discussed FD formulas for spatial discretization of the continuous equations.When coupled to boundary closures and BCs, this results in a so-called semi-discretizationof the governing equations, a large system of nonlinear ODE (with time as the continuousvariable). It is possible to follow a different derivation, where discretization in time andspace is considered together, a prominent example from gasdynamics being the Lax-Wendroffapproach. While this offers greater flexibility, it also requires greater care because consistencyis not guaranteed (as it is in the semi-discrete approach). Consistency means that the Taylorseries expansion of the discretized equations is equivalent to the original PDE in the limitwhere the spatial grid size and time step go to zero independently.
With the semi-discrete approach we can apply a large variety of time-marching schemesto the resulting system of nonlinear ODE. Time marching methods can be categorized intoexplicit schemes, where the right-hand-sides of the ODE are written as a linear combinationof its value at the present and previous time level(s), and implicit schemes, where the right-hand-side depends on the next time level, and thus requires the solution of a large system of(generally nonlinear) algebraic equations. Typically, implicit schemes are then treated withiterative or approximate factorization methods. Implicit methods are most useful in stiffproblems where it is desirable (and appropriate) to suppress certain “fast” components ofthe solution, either on physical grounds that they are not relevant or on numerical groundswhen they can be identified with irrelevant or poorly resolve components of the solution, orwhen only the steady state solution is desired. Aside from low-Mach number flows wheresuppression of high frequency acoustic waves is desirable (e.g. [95]), implicit schemes mayalso be useful to suppress fast modes associated with geometrical or coordinate systemsingularities for example flows near corners [96, 83, 85].
For explicit time marching, two standard formulations are Runge-Kutta methods (RK)and Linear Multi-step methods (LM). These methods differ in the way information propa-gates forward in time: the RK method is a so-called “one-root” method; integration proceedsforward from any point without using prior behavior of the solution. LM methods dependson multiple past instances in time, and, in general contain a superposition of a physicallycorrect solution (i.e. one that tends to the correct solution as the time step goes to zero)
23

and a spurious solutions that must be suppressed by choosing a time step small enoughso that they are damped in time. LM methods are not self-starting, since they depend onprevious time levels. Lower order LM methods are then required for the first few steps. TheDRP scheme of Tam uses an optimized (see below) LM scheme for CAA; advantages anddisadvantages of LM versus RK schemes are discussed in [2]. A majority of work in CAAhas used RK methods and so we discuss them in more detail here.
For RK methods, linear stability and, in particular, the maximum time-step for stabil-ity, can be analyzed in principle by finding the eigenvalues of the linearized system of ODEresulting from semi-discretization. For even moderate-sized grids this is of course, more ex-pensive than time-marching the equations and it is helpful to rely on simpler model problemsto gauge stability and maximum time-step. A typical analysis is to separately consider one-dimensional advection (Equation (8)) and one-dimensional diffusion (Equation (15)), bothwith periodic BC.
For Equation (8), the eigenvalues of the right-hand-side of the (linear) ODE are pureimaginary when centered FD schemes are used. In that case the minimum time step is givenby a Courant condition:
CFL =c∆t
h<
c1
Kmax
, (13)
where c1 is a constant depending on the RK method, and Kmax is the maximum value ofthe modified (nondimensional) wavenumber of the FD scheme, as defined in Section 2.7.The value of c1 is 1.7 and 2.8 for standard third- and forth-order Runge-Kutta schemes,respectively. For a purely diffusive model problem like Equation (15), the eigenvalues arepure real, and negative, and
ν∆t
h2<
c2
Kmax2
, (14)
where c2 is a constant equal to about 2.5 and 2.8 for RK3 and RK4, respectively, and Kmax2
is the maximum modified wavenumber of the second derivative operator (defined analogouslyto that for the first derivative).
For more complicated equations, these constraints are only a guide to what might beexpected. Generally, if c is interpreted as the maximum possible speed of propagation (e.g.the locally maximal value of u+a) and h the minimum grid spacing, then the above estimatesare found to be applicable.
While a majority of work has used the so-called standard third- and forth-order RKschemes, it is possible to optimize the coefficients of the time advancement to minimize wavepropagation errors. That is, time-marching causes dispersion and dissipation of wavenumbercomponents above and beyond that of the spatial discretization scheme. Some example aregiven in [97, 98, 99, 80].
2.7 Computational efficiency
Any FD scheme with at least first-order accuracy will be able to achieve an arbitrarily lowerror with a sufficiently refined grid. Higher-order and optimized schemes achieve lower errors
24

than low-order schemes for a given mesh size, but with increased computational expense (i.e.a higher operation count). All other things being equal, we should choose the scheme withthe fewest operations for a given level of accuracy. Colonius and Lele [2] provide such ananalysis which is summarized here. Before proceeding it is worth keeping in mind thatsecondary issues that arise are (i) memory requirements, and (ii) efficiency of parallelization.Memory is typically not a limiting factor with modern equipment, but parallelization is. Asa first pass, we ignore this issue and return to it briefly later.
In order to fairly compare different schemes, a measure of the error must be specified andthe computational cost to achieve that error estimated. The error in modified wavenumberprovides a useful measure, since we would expect that overall error in any particular problemto be a weighted integral of the errors in individual wavenumber components of the solution.Suppose that a given wavelength (λ = 2π
k) is discretized with Nλ points. Then the scaled
wavenumber is kh and the error can be read off plots like Figure 5. When scaled withthe operation count per grid point, Nλ is thus a measure the total “cost” of a computinga derivative for a particular wavelength. Of course, the operation count can also dependon factors that are difficult to control, such as the computer architecture, the skill of theprogrammer, optimization level of the compiler, etc. The operation count (cost) per nodewas assessed in [2] both theoretically as well as by numerical experiment, and the resultswere very close. Aside from operation count, however, one also account for the impact ofthe spatial discretization on the time step that can be used for a particular problem. Quitegenerally one may assume that the time step is limited by a Courant constraint for bothaccuracy and stability, so that the time step scales directly with the grid spacing, with aconstant factor (Section 2.6) determined by the maximum value of the modified wavenumber.
In Figure 8, the error in the modified wavenumber (absolute value), versus the estimatedcost for several explicit, compact, and optimized FD schemes is displayed. Operation countsfor the particular schemes presented may be found in ref [2]. Using the figure, we canascertain which scheme has the lowest cost for a given error, and how many grid points perwavelength should be used with that scheme in order to achieve that accuracy and cost. Forexample for an error of 30%, the second-order explicit FD scheme is the most efficient andrequires about 5 points per wavelength. If the error is 1%, than the scheme with lowest cost isthe DRP scheme, again using a minimum of about 5 points per wavelength. It is interestingthat most schemes cross over somewhere around an error of 1%. For errors smaller thanabout 1%, the optimized pentadiagonal scheme of Lui and Lele is the most efficient, despitethe fact that it has (by far) the highest operation count and requires the smallest time stepsince it has the largest value of Kmax. In general, it appears that optimization of schemes isuseful from the point of view of efficiency.
Pirozzoli [80] has taken the analysis a step further and directly optimizes the coefficientsof the FD scheme in order to increase the efficiency of the scheme. Since the maximumtime-step enters into the problem, the coefficients of an explicit time marching method aresimultaneously optimized, see also Section 2.6. While such schemes have not yet been widelyused, they offer great promise at reducing computational costs significantly while achievinga desired accuracy goal.
25

e2e4e6drpc4c6Lui
10 -5
10 -4
10 -3
10 -2
10 -1
10 0
23
5
10
20
40
100
Normalized Cost (arbitrary logarithmic scale)
Err
or in
mod
ifed
wav
enum
ber
Points per wavelength
1 10 100
1 10 100
Figure 8: The relative error in modified wavenumber and number of grid points requiredper wavelength, as a function of the normalized cost of computing a unit of physical time.Reprinted from [2] with permission from Elsevier
26

For compact schemes, there is an additional penalty that is not reflected in the aboveassessment, namely parallel implementation requires greater communication, per grid pointthan explicit methods. This is due to the coupled linear system of tri- or penta-diagonalequations that must be solved to determine the derivatives along a line of grid points in anycoordinate direction. While this favors (slightly in practice) explicit schemes, an additionalconsideration is that the compact schemes have a smaller overall stencil width, for a givenaccuracy, and thus require fewer special FD boundary closures. As noted above, it canbe difficult to derive these specialized boundary and near-boundary schemes such that theoverall system of discrete equations is stable.
2.8 Other issues
We provide a brief discussion of other issues related to the choice of FD scheme and whichcan also be analyzed using the modified wavenumber concepts introduced above:
1. Viscous and second-derivative terms. Second derivative FD operators can be derivedin an analogous manner to those first-derivative schemes discussed above. Optimizedschemes are possible [79]. The modified wavenumber for centered schemes is purelyimaginary and, in a simple diffusion model like:
ut = νuxx (15)
wavenumbers would be purely damped. It is preferable to use second-derivative oper-ators that lead to finite modified wavenumber for the highest wavenumber kh = π, sothese waves are attenuated, as opposed to two repeated applications of a first derivativeoperator that would yield zero damping at kh = π.
2. Grid stretching/generalized curvilinear coordinates. Colonius and Lele [2] show howthe modified wavenumber concept can be used to analyze how non-uniform (stretched)meshes and general curvilinear coordinates. An important aspect of the analysis is thatstretched grids can lead to internal reflection of waves if they are insufficiently resolvedon the mesh. The reflected “wave energy” is independent of the rate of stretchingand only depends on the ratio of initial to final grid spacing and the resolution of theincident wave. Figure 9 shows this process graphically.
3. Anisotropy in multidimensional computations. Acoustic waves (at least in uniformflow) propagate with a phase speed equal to the speed of sound in the direct normal tothe wavefront. By contrast, FD solutions give rise to anisotropic (coordinate directiondependent) propagation velocities. These additional errors can also be analyzed usingthe modified wavenumber.
27

}}Transmitted left running
spurious waves
Transmitted right running physical waves
Reflected Wavesk
K( k )
kc
χFine Mesh Transition Coarse Mesh
K( k c ) / R
π0
Cg > 0
Cg < 0
Figure 9: Schematic diagram depicting the reflection of waves on a stretched mesh. Reprintedfrom [2] with permission from Elsevier.
2.9 Boundary Conditions
The imposition of accurate and robust BC has been one of the most challenging aspects ofCAA. The good news is that there are by now a variety of techniques that are good enough toallow a wide range of flows to be reliably computed. The bad news is that these conditionsare not always straightforward to implement in new codes or when problem setups change.One may approach the problem in three phases: (i) derivation of appropriate BC (an exercisein both physics and numerical analysis), (ii) discretization/coupling with the interior FD (orother) scheme, and (iii) testing/tuning the conditions for particular flows of interest. Manytimes one must result to trial and error in all phases of the problem, and, unfortunately,details about BC implementation are omitted from papers in the archival literature.
The purpose of these notes is to give a broad overview of the subject as it is relevant toCAA, as well as to demonstrate some specific techniques because they are good, or popular,or both. We avoid any detailed discussion of the more difficult aspects of the mathematics,including proofs of well-posedness, etc. More detailed reviews are available, see [100, 101,102, 103, 104].
2.9.1 Artificial BC: physics and modeling issues
Our first exposure to BC when we study linear and constant coefficient PDE may lead usto the mistaken impression that BC are primarily a mathematical construct and that theyare somehow “given” from on high in any particular problem. We learn that we must becareful not to under or over-constrain the PDE (i.e. lead to a well-posed problem), and that
28

boundary/initial conditions on different portions of a space-time domain must be compatible.Such issues are, of course, at play in more complicated equations, but an additional difficultyis that the appropriate physical BC is not always obvious.
The principle difficulty occurs when we get greedy and insist on somehow truncating acomputational domain at a boundary that does not correspond to a real interface betweentwo materials or that does not extend indefinitely far from the region of interest. We usuallydo this for computational advantage, i.e. to minimize the region of space that must begridded, or when we feel that a particular region of flow can be reasonably neglected.
Thus the types of boundaries relevant to CAA are:
1. True boundaries such as rigid surfaces, or interfaces between materials, or “infinity”.
2. Far-field boundaries where disturbances are decaying. It makes sense to determineways in which the domain may be truncated and the simpler physics associated withlinear wave propagation may be used to determine a suitable closure, for example byspecifying that any incoming waves are zero. These are so-called nonreflecting (NRBC)or radiation BC.
3. Inflow boundaries where we wish to specify the flow so that we need not considerthe details about how the flow upstream of that point was generated or evolved. Ina turbulent jet, for example, we may wish to neglect altogether the flow within thenozzle and concentrate our computational resources on the evolution of the jet.
4. Outflow boundaries where we wish to truncate the domain because the flow downstreamof that point doesn’t interest us, or we feel that it will not have a significant upstreameffect and are doing so to limit the computational expense.
At the top of this list are the most physically straightforward–in principle any interfacebetween two materials (in the continuum limit) is governed by requirement that mass, mo-mentum, and energy are conserved. Treatment of far-field boundaries where disturbancesbecome linear is a fairly straightforward problem in applied mathematics, at least if the baseflow in which the disturbances propagate is uniform. As we progress down, the problemsbecome more open ended. For example, there may not be physical principles to determinewhen the flow upstream or downstream can be neglected. The problem becomes one of mod-eling. At best, we can only check a posteriori or validate by comparison with experimentsto ensure that our model is suitable.
Complicating the situation further are numerical issues associated with accurately im-plementing the physical BC. These are not limited to the more difficult inflow/outflow con-ditions. Even imposition of the no-slip BC in the discretized Navier-Stokes equations canlead to ambiguities and non-physical effects.
2.9.2 Classification of techniques for inflow/outflow and far-field boundaries
Figure 10 presents an overview of relevant models for inflow/outflow and far-field boundariesused in CAA. At the top, from left to right are increasingly simple models of the flow andthe decision tree for when such models are appropriate.
29

Artificial BCs: Flow chart
Navier-Stokes(DNS/LES) Euler eq. Lin. Euler
ViscosityImpt?
ViscousCorrectionsto Euler BC
Smalldisturb?
PML
CharacteristicNon-reflecting/
Radiation
Uniformbase flow?
Unif. FlowLin. Euler or
Wave equation.
Ad hoc.bufferlayers
NO YES YES
YES NO NO
4
Figure 10: Classification of techniques for inflow/outflow and far-field BC.
It is often the case that the flow can be idealized as linear near a far-field boundary. Ifthe flow is also uniform at that point, a variety of analytically-based BC for a truncateddomain can be derived based on solutions of the Euler equations linearized about a uni-form flow in the region exterior to the computational domain (which we hereafter refer to asUFLEE for uniform-flow linearized Euler equations). These so-called nonreflecting or radia-tion conditions are discussed in Section 2.9.3. Another technique suitable in this case is theperfectly matched layer (PML), which seeks to accomplish the same goal as the nonreflectingconditions, but requires a “sacrificial region” or buffer between the physical portion of thecomputational domain and the boundary. These conditions are also appropriate for inflowingand outflowing disturbances, but strictly only when the disturbances are small departuresfrom a uniform state. Some attempts to apply them (in an approximate way) to locallynon-uniform flows have been partially successful and will be briefly mentioned.
When the flow is nonuniform, or when the disturbance level is large, then different BCare needed. In the latter case, it is no longer appropriate to view the flow as a “base flow”and “disturbances” and more general techniques for the Euler or Navier-Stokes equationsare needed. So-called characteristic BC are probably the most popular choice in this case,but they generally lead to significant reflections of outgoing waves and flow. A differentstrategy, sometimes used in combination with characteristic BC is to use a buffer layer,wherein additional terms are added to the governing equations, usually to diffuse the flowbefore interaction with the boundary. These buffer layers are superficially similar to thePML, but they work in more general circumstances. They can generally also be applied tosimpler (linearized) flow regions, where one typically finds they are less accurate than PMLfor a fixed buffer size (or computational expense). Another pitfall of these buffer layers is
30

that they have parameters than must generally be tuned for a particular flow.
2.9.3 Nonreflecting BC, radiation BC, and PML for inviscid disturbances touniform flow
We summarize the issues and benefits of these three approaches:
1. Nonreflecting conditions (NRBC). In a single spatial dimension, the characteristics ofhyperbolic systems of equations are trajectories in the x − t plane along which theamplitude of waves is governed by an ODE. The sign of the velocity of the wavedetermines whether the wave is incoming at an artificially boundary (and thereforemust be specified). The term nonreflecting then implies that any incoming wavesshould be set to zero. In two and three dimensions the characteristics are surfacesor hyper-surfaces, and do not give rise to a local decomposition of the solution intoincoming and outgoing waves, with the result that any statement of “zero incomingwaves” must be non-local, i.e. involve integrals over the computational boundaryand/or the interior volume and/or time. For problems governed by the simple waveequation, or in electromagnetics, such non-local BC can be implemented directly intocomputations, see the discussion in [100, 101, 102]. For UFLEE, nonlocal approaches[105, 106] can also be developed but they are generally much more computationalintensive than local conditions and have not been favored in CAA.
Thus a primary research thrust has thus been finding ways to specify approximatelyNRBC that are purely local, in the sense that they are represented by PDE ratherthan integral equations. A useful way of doing this is to decompose the solution intoFourier/Laplace modes, as was first considered for the wave equation[107, 108] andlater generalized to LEE. for the Euler equations by Giles[109, 110, 111]. Such tech-niques are appropriate for (at least locally) planar boundaries. The general procedureis as follows. One first decomposes the solution into Fourier space in the direction(s)along the plane boundary and Laplace space in time, and attempts to decomposethe resulting system of coupled ODE into incoming and outgoing waves. When sucha decoupling exists, then the resulting decoupled equations are analogous to ODEfor the one-dimensional characteristic amplitudes. Once the incoming wave ampli-tudes are specified (zero usually being the appropriate incoming wave amplitude forthe nonreflecting case), then one must inverse Fourier/Laplace transform the result-ing BC to apply them in real space. In order to generate local BC, the conditionsin Fourier/Laplace space are replaced by a rational function approximation. Thenthe inverse Fourier-Laplace transform will result in a PDE to be satisfied along theboundary. Technical difficulties encountered in early efforts [109] have by and largebeen worked out [110, 111]. For example, insuring well-posedness of the BC that inturn imposes restrictions on the specific rational function approximations that may beused. It is also essential to recognize that for certain wavenumber/frequency combi-nations the UFLEE have a defective eigensystem, i.e. two characteristics become one.At edges (3D) or corners (2D) of non-periodic rectangular domains one requires a set
31

of compatibility conditions that would blend the differing approximations made on theintersecting boundaries. However, no general formulation of such conditions has beenfound. Some ad hoc procedures are discussed by [104].
Only the lowest-order conditions (i.e one-dimensional, and modified Giles conditions)have been applied to problems linearized about a nonuniform base state. In the generalcase with multiple artificial boundaries, stability for the continuous problem with non-constant coefficients does not follow from stability of the constant coefficient case.Moreover, simply replacing the constant base flow coefficients in the BC by their localvalues at a point in the flow would be correct when the length scale of the disturbances ismuch smaller than any variation of the base state (i.e. the high frequency limit). Thereare many problems of interest for which this could lead to large errors. For example,linear instability waves in a shear flow are low frequency disturbances. Essentially anyadvective disturbances that has a significant non-acoustic pressure fluctuations will leadto significant acoustic reflection at a downstream boundary. Extension of nonreflectingBC to nonuniform mean flows remains an important area of future research.
2. Radiation conditions. Asymptotic expansions with distance from a source region as thelarge parameter are the basis of radiation BC. The technique was originally developedfor the simple wave equation [112, 113]. The first term is equivalent to the classicalSommerfeld radiation condition, but applied at a finite distance rather than at infinity.For UFLEE, Bayliss & Turkel also derived conditions suitable for the outflow andcharacteristic boundaries (where the mean flow is identically zero). Tam & Webb [73]have extended the analysis to inflow boundaries, but only for the first term in theexpansion. This one-term expansion can suffer inaccuracies whenever the source is notcentered within the domain (or when the domain is not large enough), because theasymptotic expansion converges only slowly in the general case. Tam & Dong [114]allow for a nonuniform mean flow on the boundary by replacing the linear perturbationsin the BC with departures from the base flow. As in the Fourier/Laplace BC, this isa high-frequency approximation that is not expected to be accurate at inflow/outflowboundaries in shear flows.
3. Perfectly matched layer (PML). The perfectly matched layer (PML), which was origi-nally formulated for electromagnetic radiation problems [115], as extended to UFLEEby Hu [116]. The PML is a buffer layer adjacent to the edge of the computational do-main, in which the fluid properties are altered in a manner that forces waves to decayin all directions of propagation. The goal is similar to cruder buffer layer techniquesdiscussed below, but for UFLEE it can be accomplished in a more rigorous (and ulti-mately less computationally expensive way) using analytical solutions to the UFLEE(see, for example, [117]). After a decade of development, well-posed (stable) layerscan now be obtained under general uniform flows [117, 118, 119]. Unlike the hierarchyof nonreflecting and radiation conditions, there are parameters that must be tuned tooptimize the performance of PML. These include the layer thickness, and a profile thatcontrols the amount of absorption over the layer. Recently, Hagstrom & Nazarov [120]
32

extended PML to disturbances to parallel shear flows. There are some difficulties withestablishing the free parameters in order to damp physical instabilities associated withthe mean velocity profile, but promising results have been obtained [121] and furtherinvestigation is clearly warranted.
We close the discussion by noting that the BC discussed above are derived for the continuousequations of motion, and must be suitably discretized and implemented together with thenumerical method for advancing the equations of motion at the interior grid points. Aswas noted in Section 2.5, boundary closures for FD formula are intimately coupled withimplementation of the BC. Spurious solutions propagate with negative group velocity and BCcan be a principle source of such waves in practical computations. Some research [122, 123,124, 110] has sought to develop nonreflecting BC directly for the discretized FD equations.While this appears to be a viable approach, there are at present some serious restrictionsthat prevent their general use in CAA. A further discussion of the relevant issues may befound in [2].
2.9.4 Characteristic BCs for nonlinear Euler and Navier-Stokes equations
A starting point for nonlinear BC is one-dimensional flow. In that case, accurate nonlinear,nonreflecting BC from the classical method of characteristics solution [125]. That is, it ispossible to locally identify and decouple, even in the nonlinear case, left-going and right-going waves. Three characteristic curves (in x− t) can be identified whose slopes are λ1 = u,λ2 = u + a, and λ3 = u − a. BC are required for any characteristic crossing into thecomputational domain (based on the sign of λ). The integrated values of the dependentvariables along the characteristic curves are known as Riemann invariants, and these BCare usually referred to by that name, or by the term characteristic BC. The BC discussedabove are exact only for one-dimensional problems, but may be used as an approximation inmultidimensional flow. Thompson [126, 127] proposed a similar BC in the multidimensionalcase. Thompson’s BC are similar a the one-dimensional version of the linearized NRBCdiscussed above, but there is a fundamental difference. In nonlinear case, the incomingcharacteristics must carry information about the entire flow, not just disturbances to a basestate. In a nonlinear flow, the characteristic velocities u, u + a, u− a may change signs overportions of a given boundary, and in time. In rare cases a complete solution of the (nonlinear)Euler equations in the exterior could be used to compute nominal incoming characteristics,but they usually must be specified based on minimal information about the exterior problem.
For the inflow, one might wish to impose a target velocity profile, as well as perhaps tem-perature or another thermodynamic variable. The traditional approach is to simply imposeDirichlet BC on the correct number of variables, four in the case of inviscid subsonic inflow(in three dimensions). Such BC have been studied extensively and proofs of well-posednessexist (in many cases for both inviscid and viscous cases) for a number of different specifica-tions. Poinsot & Lele [128] describe a method that combines Dirichlet BC for velocity andtemperature and Thompson-style analysis for the remaining L needed to close the continu-ity equation. The problem is that all the Dirichlet BC are badly reflective for the upstream
33

propagating acoustic wave, forcing, as they do, fluctuations in certain acoustic variables tozero. Imposing the one-dimensional characteristics will be equivalent, upon linearization,to the one-dimensional nonreflecting BC and therefore at least transparent to plane wavespropagating directly upstream, but imposing velocities and density perturbations to zerowill be perfectly reflecting even for plane waves. A much less reflective inflow can, however,be constructed if more information is specified about the incoming flow. Sometimes theinflow will be laminar with relatively small amplitude disturbances, for which linearizationof the incoming characteristics is appropriate. Then only the perturbed incoming character-istics are set to zero; incoming characteristics for the base flow state then comprise the fullincoming characteristic.
At a subsonic outflow, one BC is required in the inviscid case, and a sole incomingcharacteristic needs to be specified. If linearization about a uniform state is appropriate (itseldom is) then the incoming perturbed characteristic can be set to zero. In the majority ofsituations, however, fluctuations are not small, and an appropriate base state for linearizationis not known a priori. If the entire nonlinear incoming characteristic is set to zero, there isnothing to prevent the time-averaged pressure from drifting, especially if characteristic BCare also imposed at the inflow [129, 128]. On physical grounds, the upstream propagatingcharacteristic would provide whatever acoustic impedance is needed to fix the pressure fardownstream. A simple Dirichlet condition p = p∞ would rectify this (as is the standardpractice in many CFD codes), but this corresponds to a badly reflective boundary–perfectlyreflective for plane acoustic waves. Rudy & Strikwerda [129] proposed a modification wherea term is added to the incoming characteristic to penalize any drift away from p∞.
For viscous flows, the required number of inflow and outflow BC is different from theinviscid case [130, 131]; additional constraints (beyond the inviscid ones) typically take theform of requiring certain gradients of the dependent variables (or combinations of them) tobe zero at the boundaries. Poinsot & Lele [128] provide a way to implement such viscousconditions in the characteristic variable framework.
2.9.5 Various buffer layers
While the conditions discussed thus far are often suitable for far-field and inflow BC, theyall fail badly (see Section 2.9.6) at an outflow where large-amplitude flow disturbances mustpass. It is difficult to even establish a clear definition of what a BC should do in such aflow configuration, and we must obviously exercise caution in not truncating the domainso severely that we leave out dynamically important regions of the flow. For the purposesof this discussion, then, we restrict our attention to cases where it can be established, byphysical arguments or a posteriori validation, that the flow within a certain region will berelatively insensitive to the detailed evolution of the flow downstream of the boundary.
In this section we examine absorbing layers where the flow physics are modified in a finiteregion upstream of the outflow boundary. In many cases the modifications may also be usedat inflow and free-field boundaries. Some of the ideas were originally introduced by Israeli &Orszag [132] in the context of linear wave equations. In the intervening years, the techniquesdiscussed above have rendered these techniques obsolete for linear problems, but the basic
34

ideas still inspired a number of techniques that are widely in nonlinear computation.
1. Damping. Absorbing layer treatments typically provide for damping of disturbancesprior to interaction with an artificial BC. This is done most simply by adding a lineardamping coefficient (or penalty term) to the governing equations as
qt + N(q) = −σ(x) (q − qo) , (16)
where q is the vector of dependent variables, N(q) a possibly nonlinear operator, σ(x)is a spatially varying damping coefficient, and qo is some nominal state (zero if theequations are linear) about which disturbances are defined. In most cases σ is selectedto blend smoothly between zero in the physical domain and a positive value in the layer.Disturbances are damped exponentially during their residence in the layer; σ is madelarge enough to attenuate the disturbances by the desired amount prior to interactionwith the boundary. Whatever disturbances are reflected by the boundary are returnedbut similarly damped as they propagate back through the layer before reaching thedomain as reflection error. Compared with PML, this is a crude approach. In PML,the specific damping terms are added in a way such as to make the buffer regionitself transparent (nonreflecting) as disturbances propagate into it. With this simpledamping term, the layer must typically be made much larger so that σ(x) is gradualenough to prevent internal reflection of the waves; in typical problems the number ofgrid points must exceed by a factor of 2 or 3 the length scale of the largest disturbanceexpected to penetrate the layer. The efficacy of the approach can be enhanced by usingthe best possible BC at the outer edge of the buffer. Characteristic BC discussed inthe last section are a common choice.
2. Artificial Convection. If the flow is supersonic near the boundaries, then BC aresimplified since all characteristics are incoming at the inflow boundary and outgoing atthe outflow boundary. Ta’asan and Nark [133] added an artificial convection term tothe equations to cause the flow to be supersonic in a layer near the inflow and outflowboundaries. In the outflow case, any waves that are not reflected by the internalboundary of the layer will not produce reflections at the outer boundary. Waves thatare reflected are can be partly damped by a linear damping term as discussed above[134]. Provided the damping and convection are applied smoothly, reflections canbe made small. A similar approach [135] modifies convection speeds by slowing-downoperators. The concept is to allow for long residence times in the layer so that dampingis effective. As in PML, the effectiveness of these ad hoc absorbing layers is stronglydependent on the width of the layer. They involve, however, an even greater numberof parameters and profiles than PML that must be determined empirically.
3. Grid stretching. One can in principle obviate the need for BC by mapping the infinitedomain to a finite one (which could be closed by specifying any fluctuations to vanish).For PDE with smooth (i.e. non-radiating/advecting) solutions, such as normal bound-aries in incompressible flow, such a technique is useful provided some care is taken in
35

choosing an appropriate mapping. However, for radiating/advecting flows, waves withfixed or slowly varying wavelength propagate into the region of mesh stretching, wherethey become progressively more poorly resolved until they can no longer be supportedby the discretization. An analysis of wave propagation through nonuniform meshes [2]shows that such waves will be completely internally reflected when the grid stretchingis infinite. If, of the other hand, a mechanism is provided to dissipate disturbancesas they propagate through the mesh stretching, for example by artificial viscosity orfiltering [136, 137], then the dispersion associated with grid stretching can actually bean advantage, since the residence time in the region of grid stretching can be madeindefinitely long by providing more gradual stretching.
4. Fringe methods and windowing. In the fringe method originally developed for spatiallyevolving boundary layers by Spalart [138] and widely applied thereafter, the need forany inflow and outflow artificial BC is obviated by using periodic BC and an absorbinglayer to modify the flow near the boundary before it is recycled back as inflow. A lineardamping coefficient analogous to that in Equation (16) is added to the right-hand-sideof the momentum equations. A slightly different approach to using periodic BC withan absorbing layer is the spatial windowing of the equations proposed in Guo et al.[139] and revisited recently by Schlatter et al. [140]. Here the governing equations arewindowed:
w(x)qt + w(x)f(q)x = 0 or qt + (w(x)f(q))x = w′(x)f(q), (17)
where the one-dimensional case is written here for simplicity. Here w(x) is the windowfunction, which is zero at the edges of the domain, rises to unity over the fringe andis unity in the interior. q = w(x)q are windowed variables. Provided that the windowfunction meets certain differentiability and periodicity constraints [139], similar tothose on S(x), then a Fourier spectral expansion for q is appropriate and spectralaccuracy is retained. In general, q cannot be exactly recovered from q since w(x) = 0at the boundary. In fact, there is a strong analogy between modeling the effect ofwindowing with the traditional turbulence modeling problem [141]. In turbulencemodeling, the concern is with disturbances that become (as the result of nonlinearprocesses) too fine to be represented on the mesh in physical space. It is well knownthat dealiasing (i.e. by using the Galerkin method or by explicit dealiasing of thenonlinear terms) allows this energy transferred to small scales to be removed fromthe computation, but in a process that is not in general a good model for the trueenergy cascade. In LES, for example, the governing equations are filtered, and asub-grid model is supplied, in essence, to recover the unfiltered variables (needed inthe nonlinear terms) from the filtered ones. Some recent work provides models toclose the windowed variables [140, 141]. Results [141] from model problems showreasonably good transparency of the boundary using the so-called super-grid model.Some comparisons with other BC are provided in the next section. Colonius and Ran[141] also show that the super-grid model requires only two scalar parameters, numberof points across the layer, the second is maximum slope of the windowing function,
36

w(x) across the fringe. Properly scaled, there is only a small range of values that canbe chosen for the slope, and the results are not particularly sensitive to the choice.
2.9.6 Some comparisons of accuracy and robustness
We close the discussion of BC by providing some comparisons that allow the reader toassess the accuracy of some of the BCs discussed above on model problems. Many othercomparisons may be found in the literature (see [2, 142, 143] and references therein). Adifficulty in comparing BC is assessing whether any error is caused by the formulation ofthe (continuous) BC, or because of errors associated with the boundary closures or otherimplementation issues. Some previous comparisons were made using dissipative numerics(upwind-biased or explicit artificial viscosity or filtering), but these can suppress long-timeinstabilities associated with the BC, leading to an accurate solution, but with a loss ofgenerality since the BC cannot be applied independently of the choice of damping. In theexamples we give, we use non-dissipative FD schemes to solve the either the UFLEE, or thecomplete nonlinear Navier-Stokes equations in two dimensions with a 4th-order compact FDscheme or with a spectral method in the case of the super-grid BC. Further details regardingthe tests are given in [2].
In Figure 11 we perform a standard acoustic wave propagation test with an initiallycircular pressure pulse centered in the computational domain. The center of the pulse istaken as the origin in the radiation BC [73]. Results are shown in Figure 11 for the followingmethods: local Fourier/Laplace BCs with (0,0) and (2,2) Pade approximants for the squareroot, simple one-dimensional layer widths. The (0,0) Fourier/Laplace BC is identical tothe “modified” BC proposed by Giles [109]. For this test, radiation conditions performbest especially at early times. In our implementation, the radiation conditions resulted ina slow long-time instability that was not reported in previous comparisons [73, 142]. Atearlier times the maximum errors of the (0,0) and (2,2) Fourier/Laplace BC are about afactor of 2 higher than the radiation BC, while maximum error for the characteristic BCare about an order of magnitude higher than the others. The PML layer with 30 pointsgives similar error to the (2,2) Pade Fourier Laplace condition. At the earliest times whenthe initial pulse is just leaving the computational domain, the (2,2) Fourier/Laplace has amuch smaller error than the (0,0) approximation (Giles), and is similar in magnitude to theradiation BC. At later times most of the waves remaining in the computational domain arepropagating nearly tangent to the boundaries, which is the worst-case situation for any ofthe Fourier/Laplace BC. If we repeat this problem, but offset the initial pulse from the centerof the domain, we see that the accuracy of the radiation BC is degraded. This is shown inFigure 11(b,c), where the initial pulse has been offset a distance of 5α in the +x1 direction.Now the (0, 0) Fourier/Laplace and radiation BCs show similar maximum errors, but the(2, 2) Fourier/Laplace now has a lower maximum error by about a factor of 2, and is roughlyequivalent to the 30 point PML layer. Obviously when the center of any pulse is known apriori, optimal performance of the radiation BC could again be achieved by simply shiftingthe origin of the equations, but this is not likely to be known in practice. In the third test,we initialize the computation with u, v and p set to a different pseudo-random (uniform
37

probability between 0 and 1) at each point (including boundary) in the domain. We thenmeasure the sum of the root-mean-square values of u, v, and p (rather than the differencewith any exact solution) as a function of time. This provides an indication of “worst case”performance the of the BCs, and measures their ability to effectively remove vortical andacoustic disturbances at a variety of wavelengths and angles of incidence from the boundary.The results are presented in Figure 11(e,f). In this test, the (2, 2) Fourier/Laplace BC givesa substantial advantage over the (0, 0) and one-dimensional characteristic BCs, and even the30 point PML. Finally, in Figure 11(g) we compare PML with the super-grid BC discussedin the previous section. The comparison shows that super-grid delivers smaller errors withequivalent computational expense.
In Figure 12, a zero-circulation vortex propagated through an outflow boundary in anotherwise uniform flow. The exact solution (close to exact for a slight viscosity) is thatthe vortex propagates with constant speed, unaltered by the uniform flow. Two linearizedBC were used: the Giles [109] outflow condition, where in the linear case outgoing vorticityproduces no incoming acoustic wave, and the modified Giles condition, which producesincoming acoustic waves proportional to the amplitude of the vortex. The results, shownin Figure 12, demonstrate that when the induced velocity from the vortex is a significantfraction of the uniform velocity, nonlinear reflections are as significant as linear reflectionsfrom the less-accurate BC. Results from the super-grid BC show an error much smaller thanlinearized BC when the strength of the vortex exceeds about 2% of the uniform flow speed.
Further examples of BC performance will be given in the lectures.
2.10 Outlook
We close this section on numerical methods for CAA by noting some areas of current devel-opment and opportunities for future work in CAA.
1. Complex geometry. In general, the high-order-accurate and optimized schemes dis-cussed here are limited to curvilinear (body-fitted) coordinate systems, and indeed insome cases to simpler Cartesian coordinate systems. Methods that overcome theselimitations are desirable. Different approaches that are being studied are (i) achievinghigher order of accuracy (or better wave propagation characteristics) on unstructuredmeshes, (ii) extensions of immersed boundary and interface methods developed for in-compressible flow to compressible flow, especially in conjunction with adaptive meshrefinement techniques, and (iii) higher-order-accurate patching of overlapping (andperhaps moving) grids.
2. BC. Approaches are needed to (i) develop more efficient buffer layers that require fewermesh points and tunable parameters for nonlinear Euler and Navier-Stokes computa-tions, and (ii) implementation of high-order-accurate non-reflecting BC and PML tolinear disturbances in non-uniform flows. Less glamorous but clearly important is aneed to better documentation implementation issues for existing techniques and toprovide more careful accuracy comparisons between different methods.
38

50 100 150 200 25010
-7
10-6
10-5
10-4
Err
or
t a / L
50 100 150 200 25010
-7
10-6
10-5
10-4
t a / L
Radiation1D CharacteristicGilesLocal Pade (2,2)
N = 10N = 20N = 30
50 100 150 200 25010
-7
10-6
10-5
10-4
t a / L
Err
or PML
50 100 150 200 25010
-7
10-6
10-5
10-4
Err
ort a / L
N = 10N = 20N = 30
PML
50 100 150 200 25010
-7
10-6
10-5
10-4
Err
or
t a / L
Radiation1D CharacteristicGilesLocal Pade (2,2)
1D CharacteristicGilesLocal Pade (2,2)
50 100 150 200 25010
-7
10-6
10-5
10-4
Err
or
t a / L
N = 10N = 20N = 30
PML
(a) (b)
(c) (d)
(e) (f)
Err
or
50 100 150 200 25010
-7
10-6
10-5
10-4
t a / L
Err
or
PMLSuper-grid
N = 10N = 20N = 30
(g)
Figure 11: Performance of linearized BC on test problems. (a,b) Centered acoustic pulse;(c,d) Off-centered acoustic pulse; (e,f) Random initial condition; (g) comparison of PMLwith super-grid BC for the centered acoustic pulse case. Reprinted from [2] with permissionfrom Elsevier.
39

10-3 10-2 10-1 100 10110-6
10-5
10-4
10-3
10-2
10-1
Incident vortex strength (Vmax / U)R
efle
cted
aco
usti
c w
ave
stre
ngth
(v'
max
/ U
)
Figure 12: Performance of linearized outflow BC for propagation of a nonlinear vortex (char-acterized by its maximum induced velocity, Vmax) in a uniform flow, uo. The maximum nor-mal velocity in the acoustic reflection, v′max is plotted. The Giles condition would, in linearcalculation, produce no reflection. For reference, the super-grid model (see Section 2.9.5) isalso plotted. Giles [109] ( • ); Modified Giles ( ); Colonius and Ran [141] super-grid buffer( N ). Reprinted from [2] with permission from Elsevier.
3. Hybrid methods. Unified approaches to equation spitting and acoustic analogy (a goodstarting point is Goldstein’s recent generalized acoustic analogy [46]) are needed torationalize existing splitting approaches and to develop more reliable approaches forflows that involve interaction of acoustic waves with flow gradients.
4. Shock capturing. Good progress is being made, but good shock capturing algorithmsstill tend to be overly dissipative from the point of view of turbulence fluctuations andsound. Hybrid methods that adaptively turn shock capturing schemes on and off whenneeded as well as finely tuned artificial viscosity models are two approaches that arecurrently being studied.
5. LES. Computational and modeling issues relevant to CAA include (i) the developmentof SGS noise source models, and (ii) the development of CAA algorithms that discretelyconserve mass, momentum, kinetic energy, etc. so that poorly resolved disturbances donot “pile up” at the grid cutoff scale. There is also a need for advanced flow diagnosticsso that LES models can be validated against representative experiments that documentboth the turbulent flow and the far field sound.
6. DNS. Numerical methods and computer resources permit a direct approach to com-puting a turbulent flow and the radiated sound at low to moderate Reynolds numbers.Surprisingly few computations of turbulent flows (as opposed to simpler model prob-lems) have actually been undertaken. While these computations are not directly usefulfor engineering prediction, they are recommended since they provide a rich databasethat can be used to investigate a range of physical and numerical issues in aeroacoustics.
40

References
[1] M. Wang, J.B. Freund, and S.K. Lele. Computational prediction of flow-generatedsound. Ann. Rev. Fluid Mech., 38:483–512, 2006.
[2] T. Colonius and S.K. Lele. Computational aeroacoustics: Progress in nonlinear prob-lems of sound generation. Progress in Aerospace Sciences, 40(6):345–416, 2004.
[3] D. G. Crighton. Basic principles of aerodynamic noise generation. Progress inAerospace Sciences, 16(1):31–96, 1975.
[4] J. B. Freund. Noise sources in a low-Reynolds-number turbulent jet at Mach 0.9. J.Fluid Mech., 438:277–305, 2001.
[5] J. B. Freund, S. K. Lele, and P. Moin. Direct numerical simulation of a Mach 1.92turbulent jet and its sound field. AIAA J., 38(11):2023–2031, 2000.
[6] K. S. Brentner. Numerical algorithms for acoustic integrals with examples for rotornoise prediction. AIAA J., 35:625–630, 1997.
[7] A. S. Lyrintzis. Integral methods in computational aeroacoustics. In Proceedings ofCEAS Workshop ‘From CFD to CAA’., Athens, Greece, 2002.
[8] K. S. Brentner and F. Farassat. Modeling aerodynamically generated sound of heli-copter rotors. Prog. Aerospace Sci., 39:83–120, 2003.
[9] J. B. Freund, S. K. Lele, and P. Moin. Calculation of the radiated sound field usingan open Kirchhoff surface. AIAA J., 34(5):909–916, 1996.
[10] J. E. Ffowcs Williams and D. L. Hawkings. Sound generation by turbulence andsurfaces in arbitrary motion. Proc. R. Soc. Lond. A, 264:321–342, 1969.
[11] K. S. Brentner and F. Farassat. An analytical comparison of the acoustic analogy andKirchhoff formulations for moving surfaces. AIAA J., 36:1379–1386, 1998.
[12] Brian E. Mitchell, Sanjiva K. Lele, and Parviz Moin. Direct computation of the soundfrom a compressible co-rotating vortex pair. J. Fluid Mech., 285:181–202, 1995.
[13] O. Inoue, Y. Hattori, and T. Sasaki. Sound generation by coaxial collision of twovortex rings. J. Fluid Mech., 424:327–365, 2000.
[14] T. Colonius, S. K. Lele, and P. Moin. Sound generation in a mixing layer. J. FluidMech., 330:375–409, 1997.
[15] C. Bogey, C. Bailly, and D. Juve. Numerical simulation of sound generated by vortexpairing in a mixing layer. AIAA J., 38(12):2210–2218, 2000.
41

[16] B. E. Mitchell, S. K. Lele, and P. Moin. Direct computation of the sound generatedby vortex pairing in an axisymmetric jet. J. Fluid Mech., 383:113–142, 1999.
[17] M. Wei and J. B. Freund. A noise-controlled free shear flow. J. Fluid Mech., 546:123–152, 2006.
[18] B. E. Mitchell, S. K. Lele, and P. Moin. Direct computation of Mach wave radiationin an axisymmetric supersonic jet. AIAA J., 35(10):1574–1580, 1997.
[19] R. Mankbadi, R. Hixon, S. H. Shih, and L. A. Povinelli. Use of linearized Eulerequations for supersonic jet noise prediction. AIAA J., 36(2):140–147, 1998.
[20] K. Mohseni, T. Colonius, and J. B. Freund. An evaluation of linear instability wavesas sources of sound in a supersonic turbulent jet. Physics of Fluids, 14(10):3593–3600,2002.
[21] K. R. Meadows, A. Kumar, and M. Y. Hussaini. Computational study on the interac-tion between a vortex and a shock wave. AIAA J., 29:174–179, 1991.
[22] J. L. Ellzey, M. R. Henneke, J. M. Picone, and E. S. Oran. The interaction of a shockwith a vortex: shock distortion and the production of acoustic waves. Phys. Fluids,7:172–184, 1995.
[23] K. R. Meadows and D. A. Caughey. The role of shock motion and deformation in thegeneration of shock noise. AIAA Paper 96-1777, 1996.
[24] F. Grasso and S. Pirozzoli. Simulations and analysis of the coupling process of com-pressible vortex pairs: free evolution and shock induced coupling. Phys. Fluids,13(5):1343–1366, 2001.
[25] O. Inoue and Y. Hattori. Sound generation by shock-vortex interactions. J. FluidMech., 380:81–116, 1999.
[26] O. Inoue and Y. Takahashi. Successive generation of sounds by shock-strong vortexinteraction. Phys. Fluids, 12(12):3229–3234, 2000.
[27] T. Manning and S. K. Lele. Numerical investigation of sound generation in supersonicjet screech. AIAA/CEAS Paper 2000-2081, 2000.
[28] C. Lui and S. K. Lele. A numerical investigation of broadband shock noise. AIAAPaper 2002-0074, 2002.
[29] C. W. Rowley, T. Colonius, and A.J. Basu. On self-sustained oscillations in two-dimensional compressible flow over rectangular cavities. J. Fluid Mech., 455:315–346,2002.
[30] C. M. Shieh and P. J. Morris. Parallel numerical simulation of subsonic cavity noise.AIAA Paper 99-1891, 1999.
42

[31] C. M. Shieh and P. J. Morris. Parallel computational aeroacoustic simulation of tur-bulent subsonic cavity flow. AIAA Paper 2000-1914, 2000.
[32] X. Gloerfelt, C. Bailly, and D. Juve. Direct computation of the noise radiated by asubsonic cavity flow and application of integral methods. J. Sound Vib., 266:119–146,2003.
[33] H. Ran and T. Colonius. Numerical simulation of sound radiated by a turbulent vortexring. AIAA Paper 2004-2918, 2004.
[34] B. J. Boersma and S. K. Lele. Large eddy simulation of compressible turbulent jets.In Annual Research Briefs, pages 365–377. Center for Turbulence Research, StanfordUniversity, 1999.
[35] C. Seror, P. Sagaut, C. Bailly, , and D. Juve. Subgrid scale contribution to noiseproduction in decaying isotropic turbulence. AIAA J., 38(10):1795–1803, 2000.
[36] C. Seror, P. Sagaut, C. Bailly, and D. Juve. On the radiated noise computed bylarge-eddy simulation. Phys. Fluids, 13(2):476–487, 2001.
[37] D. Bodony and S. K. Lele. Jet noise prediction of cold and hot subsonic jets usinglarge- eddy simulation. AIAA Paper 2004-3022, 2004.
[38] D. J. Bodony and S. K. Lele. Spatial scale decomposition of shear layer turbulenceand the sound sources associated with the missing scales in a large-eddy simulation.AIAA Paper 2002-2454, 2002.
[39] D. J. Bodony and S. K. Lele. A statistical subgrid scale noise model: formulation.AIAA Paper 2003-3252, 2003.
[40] R. Rubinstein and Y. Zhou. The frequency spectrum of sound radiated by isotropicturbulence. Phys. Lett. A, 267:379–383, 2000.
[41] R. Rubinstein and Y. Zhou. Characterization of sound radiation by unresolved scalesof motion in computational aeroacoustics. Eur. J. Mech. B: Fluids, 21:105–111, 2002.
[42] http://www.grc.nasa.gov/WWW/Acoustics/analysis/software/jetnoise.htm.
[43] J.B. Freund. Noise-source turbulence statistics and the noise from a Mach 0.9 jet.Phys. Fluids, 15(6):1788–1799, 2003.
[44] M. J. Lighthill. On sound generated aerodynamically: I. General theory. Proc. RoyalSoc. Lond. A, 211:564–587, 1952.
[45] G. M. Lilley. On the noise from jets. Technical Report CP-131, AGARD, 1974.
[46] M. E. Goldstein. A generalized acoustic analogy. J. Fluid Mech., 488:315–333, 2003.
43

[47] M. Wang, S. K. Lele, and P. Moin. Computation of quadrupole noise using acousticanalogy. AIAA J., 34(11):2247–4344, November 1996.
[48] C. Bogey, C. Bailly, and D. Juve. Computation of flow noise using source terms inlinearized Euler’s equation. AIAA J., 40:235–243, 2002.
[49] R. Ewert, M. Meinke, and W. Schroder. Comparison of source term formulations fora hybrid CFD/CAA method. AIAA Paper 2001-2200, 2001.
[50] R. Ewert, M. Meinke, and W. Schroder. Acoustic perturbation equations based onflow decomposition via source filtering. J. Comput. Phys., 188(2):365–398, 2003.
[51] K. Ehrenfried, C. Meyer, and A. Dillmann. Simulation of sound propagation in bound-ary layers based on Mohring’s acoustic analogy. AIAA Paper 2003-3272, 2003.
[52] M. E. Goldstein. An exact form of Lilley’s equation with a velocityquadrupole/temperature dipole source term. J. Fluid Mech., 443:231–236, 2001.
[53] M. E. Goldstein and L. M. Handler. The role of instability waves in predicting jetnoise. AIAA Paper 2003-3256, 2003.
[54] D. G. Crighton, A. P. Dowling, J. E. Ffowcs Williams, M. Heckl, and F. G. Leppington.Modern methods in analytical acoustics - Lecture Notes. Springer Verlag, 1992.
[55] C. K. W. Tam and L. Auriault. Jet mixing noise from fine-scale turbulence. AIAA J.,37(2):145–153, 1999.
[56] J. C. Hardin and D. S. Pope. An acoustic/viscous splitting technique for computationalaeroacoustics. Theor. Comput. Fluid Dyn., 6:323–340, 1994.
[57] W. Z. Shen and J. N. Sorensen. Comment on the aeroacoustic formulation of hardinand pope. AIAA J., 37:141–143, 1999.
[58] S. C. Crow. Aerodynamic sound emission as a singular perturbation problem. Studiesin Applied Math, 49:355–368, 1970.
[59] NASA/Ohio Aerospace Institute. Computational Aeroacoustics Workshop on Bench-mark Problems, Cleveland, Ohio, 1995,1996,2000,2003.
[60] B. Cockburn, G. Karniadakis, and C.-W. Shu, editors. Discontinuous Galerkin meth-ods: theory, computational, and applications. Springer, 2000.
[61] D. A. Kopriva. A staggered-grid multidomain spectral method for the compressiblenavier-stokes equations. J. Comput. Phys., 143(1):125–158, 1998.
[62] D. Stanescu and W. G. Habashi. Validation of a 3d multidomain spectral method forfan noise prediction. AIAA/CEAS Paper 98-2266, 1998.
44

[63] W. H Lin, A. Hadid, E. Ascoli, and A. Darian. Computations of aeroacoustic solutionsby a legendre spectral element method. AIAA/CEAS Paper 99-1944, 1999.
[64] D Ait-Ali Yahia, M. P. Robichaud, D. Stanescu, and W. G. Habashi. Spectral elementgrid generation and nonlinear computations for noise radiation from aircraft engines.AIAA/CEAS Paper 98-1832, 1999.
[65] S. S. Collis. Multiscale methods for turbulence simulation and control. In 32nd Com-putational Fluid Dynamics Lecture Series, number 034. von Karman Institute, 2002.
[66] H. L. Atkins and C. W. Shu. Quadrature-free implementation of discontinuous Galerkinmethod for hyperbolic equations. AIAA J., 36:775–782, 1998.
[67] C. P. A. Blom, R. Hagmeijer, and A. Biesheuvel. Three-dimensional quadrature-freediscontinuous Galerkin method for computational aeroacoustics. AIAA Paper 2001-2198.
[68] S. S. Collis and K. Ghayour. Discontinuous Galerkin methods for compressible DNS. InProceedings of FEDSM’03, number 45632 in FEDSM2003, Honolulu, HI, 2003. ASME.
[69] S. Nagarajan, S. K. Lele, and J. H. Ferziger. A robust high-order compact method forlarge eddy simulation. J. Comput. Phys., 191:392–419, 2003.
[70] O. M. Knio and L. Ting. Vortical flow outside a sphere and sound generation. SIAMJournal on Applied Mathematics, 57(4):972–981, 1997.
[71] O. M. Knio, L. Collorec, and D. Juve. Numerical study of sound emission by 2Dregular and chaotic vortex configurations. J. Comput. Phys., 116(2):226–246, 1995.
[72] J. D. Eldredge, T. Colonius, and A. Leonard. A vortex particle method for two-dimensional compressible flow. J. Comput. Phys., 179(2):371–399, 2002.
[73] C. K. W. Tam and J. C. Webb. Dispersion-relation-preserving finite-difference schemesfor computational acoustics. J. Comput. Phys., 107(2):262–281, 1993.
[74] C. Lui and S. K. Lele. Direct numerical simulation of spatially developing, compress-ible, turbulent mixing layers. AIAA Paper 2001-0291, 2001.
[75] L. N. Trefethen. Group velocity in finite difference schemes. S.I.A.M. Review,24(2):113–136, 1982.
[76] R. Vichnevetsky. Wave propagation analysis of difference schemes for hyperbolic equa-tions: A review. Int. J. Num. Meth. Fluids, 7:409–452, 1987.
[77] R. Hixon and E. Turkel. Compact implicit MacCormack-type schemes with high ac-curacy. J. Comput. Phys., 158(1):51–70, 2000. see also J. Comput. Phys. 163(2):547.
45

[78] M. Zhuang and R. E. Chen. Optimized upwind dispersion-relation-preserving finitedifference scheme for computational aeroacoustics. AIAA J., 36(11):2146–2148, 1998.
[79] S. K. Lele. Compact finite-difference schemes with spectral-like resolution. J. Comput.Phys., 103(1):16–42, 1992.
[80] S. Pirozzoli. Performance analysis and optimization of finite difference schemes forwave propagation problems. J. Comput. Phys., 2006. submitted.
[81] S. Ghosal. An analysis of numerical errors in large-eddy simulations of turbulence. J.Comput. Phys., 125(1):187–206, 1996.
[82] C. K. W Tam, J. C. Webb, and Z. Dong. A study of the short wave components incomputational acoustics. Journal of Computational Acoustics, 1(1):1–30, 1993.
[83] M. F. Barone and Lele S. K. A numerical technique for trailing edge acoustic scatteringproblems. AIAA Paper 2002-0026, 2003.
[84] M. R. Visbal and D. V. Gaitonde. High-order accurate methods for unsteady vorticalflows on curvilinear meshes. AIAA Paper 98-0131, 1998.
[85] D. V. Gaitonde and M. R. Visbal. Further development of a Navier-Stokes solutionprocedure based on higher-order formulas. AIAA Paper 99-0557, 1999.
[86] M. H. Carpenter, D. Gottlieb, and S. Abarbanel. The stability of numerical bound-ary treatments for compact high-order finite-difference schemes. J. Comput. Phys.,108(2):272–295, 1993.
[87] B. Gustafsson, H. -O. Kreiss, and A. Sundstrom. Stability theory of difference approx-imations for mixed initial boundary-value problems. 2. Math. Comp., 26(119):649,1972.
[88] M. H. Carpenter, D. Gottlieb, and S. Abarbanel. Time-stable boundary-conditions forfinite-difference schemes solving hyperbolic systems-methodology and application tohigh-order compact schemes. J. Comput. Phys., 111(2):220–236, 1994.
[89] R. Hixon. Prefactored small-stencil compact schemes. J. Comput. Phys., 165(2):522–541, 2000.
[90] S. S. Abarbanel and A. E. Chertock. Strict stability of high-order compact implicitfinite-difference schemes: The role of boundary conditions for hyperbolic PDEs, I. J.Comput. Phys., 160(1):42–66, 2000.
[91] S. S. Abarbanel, A. E. Chertock, and A. Yefet. Strict stability of high-order com-pact implicit finite-difference schemes: The role of boundary conditions for hyperbolicPDEs, II. J. Comput. Phys., 160(1):67–87, 2000.
46

[92] T. Hagstrom. Experiments with stable, high-order difference approximations to hy-perbolic initial-boundary value problems. In A. Bermudez, D. Gomez, C. Hazard,P. Joly, and J. Roberts, editors, Proceedings of the Fifth International Conference onMathematical and Numerical Aspects of Wave Propagation Phenomena. SIAM, 2000.
[93] J. Nordstrom and M. H. Carpenter. Boundary and interface conditions for high-orderfinite-difference methods applied to the Euler and Navier-Stokes equations. J. Comput.Phys., 148:621–645, 1999.
[94] J. Nordstrom and M. H. Carpenter. High-order finite-difference methods, multidimen-sional linear problems, and curvilinear coordinates. J. Comput. Phys., 173:149–174,2001.
[95] C. Wall, C. D. Pierce, and P. Moin. A semi-implicit method for resolution of acousticwaves in low Mach number flows. J. Comput. Phys., 181(2):545–563, 2002.
[96] S. S. Collis and S.K. Lele. A computational investigation of receptivity in high-speedflow near a swept leading edge. Technical Report TF-71, Department of MechanicalEngineering, Stanford University, 1997.
[97] D. W. Zingg, H. Lomax, and H. M. Jurgens. Optimized finite-difference schemes forwave propagation. AIAA Paper 93-0459, 1993.
[98] F. Q. Hu, M. Y. Hussaini, and J. Manthey. Low-dissipation and low-dispersion Runge-Kutta schemes for computational acoustics. J. Comput. Phys., 124:177–191, 1996.
[99] D. Stanescu and W. G. Habashi. 2N-storage Runge-Kutta schemes for acoustics. J.Comput. Phys., 143:674–681, 1998.
[100] D. Givoli. Non-reflecting boundary conditions. J. Comput. Phys., 94:1–29, 1991.
[101] S. V. Tsynkov. Numerical solution of problems on unbounded domains. AppliedNumerical Mathematics, 27(4):465–532, 1998.
[102] T. Hagstrom. Radiation boundary conditions for the numerical simulation of waves.Acta Numerica, 8:47–106, 1999.
[103] C. K. W. Tam. Advances in numerical boundary conditions for computational aeroa-coustics. AIAA Paper 97-1774, 1997.
[104] T. Colonius. Modeling artificial boundary conditions for compressible flow. Ann. Rev.Fluid Mech., 36:315–345, 2004.
[105] S. Tsynkov, S. Abarbanel, J. Nordstrom, V. Ryaben’kii, and V. Vatsa. Global artificialboundary conditions for computation of external flows with jets. AIAA J., 38(11):2014–2022, 2000.
47

[106] I. L. Sofronov. Non-reflecting inflow and outflow in a wind tunnel for transonic time-accurate simulation. J. Math. Anal. Appl., 221:92–115, 1998.
[107] B. Engquist and A. Majda. Absorbing boundary conditions for the numerical simula-tion of waves. Math. Comp., 31(139):629–651, 1977.
[108] B. Engquist and A. Majda. Radiation boundary conditions for acoustic and elasticwave calculations. Comm. Pure Appl. Math., 32:313–357, 1979.
[109] M. B. Giles. Nonreflecting boundary-conditions for Euler equation calculations. AIAAJ., 28(12):2050–2058, 1990.
[110] C. W. Rowley and T. Colonius. Discretely nonreflecting boundary conditions for linearhyperbolic systems. J. Comput. Phys., 157(2):500–538, 2000.
[111] T. Hagstrom and J. Goodrich. Accurate radiation boundary conditions for the lin-earized Euler equations in Cartesian domains. SIAM J. Sci. Comput., 24(3):770–795,2002.
[112] A. Bayliss and E. Turkel. Radiation boundary conditions for wave-like equations.Communications on Pure and Applied Mathematics, 33(6):707–725, 1980.
[113] A. Bayliss and E. Turkel. Far field boundary conditions for compressible flows. J.Comput. Phys., 48(2):182–199, 1982.
[114] C. K. W. Tam and Z. Dong. Radiation and outflow boundary conditions for directcomputation of acoustic and flow disturbances in a nonuniform mean flow. J. Comput.Acoust., 4(2):175–201, 1996.
[115] J. P. Berenger. A perfectly matched layer for the absorption of electromagnetic waves.J. Comput. Phys., 114(2):185–200, 1994.
[116] F. Q. Hu. On absorbing boundary conditions for linearized euler equations by a per-fectly matched layer. J. Comput. Phys., 129(1):201–219, 1996.
[117] S. Abarbanel, D. Gottlieb, and J.S. Hesthaven. Well-posed perfectly matched layersfor advective acoustics. J. Comput. Phys., 154(2):266–283, 1999.
[118] F. Q. Hu. A stable, perfectly matched layer for linearized Euler equations in unsplitphysical variables. J. Comput. Phys., 173:455–480, 2001.
[119] T. Hagstrom. New results on absorbing layers and radiation boundary conditions. InM. Ainsworth, D. Duncan, P. Davies, and P. Martin, editors, Computational Methodsin Wave Propagation in Direct Scattering. Springer, 2003. In press.
[120] T. Hagstrom and I. Nazarov. Absorbing layers and radiation boundary conditions forjet flow simulations. AIAA Paper 2002-2606, 2002.
48

[121] T. Hagstrom and I. Nazarov. In Proceedings of the 4th Computational AeroacousticsWorkshop on Benchmark Problems, October 2003. In press, NASA CP.
[122] R. Vichnevetsky and E. C. Pariser. High order numerical Sommerfeld boundary con-ditions: Theory and experiments. Computations and Mathematics with Applications,11:67–78, 1985.
[123] R. Vichnevetsky. Invariance theorems concerning reflection at numerical boundaries.Journal of Computational Physics, 63:268–282, 1986.
[124] T. Colonius. Numerically nonreflecting boundary and interface conditions for com-pressible flow and aeroacoustic computations. AIAA J., 35(7):1126–1133, 1997.
[125] G. W. Hedstrom. Nonreflecting boundary conditions for nonlinear hyperbolic systems.J. Comput. Phys., 30:222–237, 1979.
[126] K. W. Thompson. Time dependent boundary conditions for hyperbolic systems. J.Comput. Phys., 68:1–24, 1987.
[127] K. W. Thompson. Time dependent boundary conditions for hyperbolic systems ii. J.Comput. Phys., 89(2):439–461, 1990.
[128] T. Poinsot and S. K. Lele. Boundary conditions for direct simulation of compressibleviscous flows. J. Comput. Phys., 101:104–129, 1992.
[129] D. H. Rudy and J. C. Strikwerda. A nonreflecting outflow boundary condition forsubsonic Naveier-Stokes calculations. J. Comput. Phys., 36:55–70, 1980.
[130] J. C. Strikwerda. Initial boundary value problems for incompletely parabolic systems.Comm. Pure Appl. Math., 30:797–822, 1977.
[131] J. Oliger and A. Sundstrom. Theoretical and practical aspects of some initial boundary-value problems in fluid-dynamics. SIAM J. Appl. Math., 35(3):419–446, 1978.
[132] M. Israeli and S. A. Orszag. Approximation of radiation boundary conditions. J.Comput. Phys., 41:115–135, 1981.
[133] S. Ta’asan and D. M. Nark. An absorbing buffer zone technique for acoustic wavepropagation. AIAA Paper 95-0146, 1995.
[134] J. B. Freund. Proposed inflow/outflow boundary condition for direct computation ofaerodynamic sound. AIAA J., 35(4):740–742, 1997.
[135] S. Karni. Far-field filtering operators for supression of reflections from artificial bound-aries. SIAM J. Numer. Anal., 33(3):1014–1047, 1996.
[136] M. Rai and P. Moin. Direct simulations of turbulent flow using finite-differenceschemes. J. Comput. Phys., 96:15–53, 1991.
49

[137] T. Colonius, S. K. Lele, and P. Moin. Boundary conditions for direct computation ofaerodynamic sound generation. AIAA J., 31(9):1574–1582, 1993.
[138] P. R. Spalart. Direct numerical study of leading edge contamination. In Fluid Dynamicsof Three-Dimensional Turbulent Shear Flows and Transition, volume AGARD-CP-438,pages 5.1–5.13, 1988.
[139] Y. Guo, N. A. Adams, and L. Kleiser. Direct numerical simulation of transition in aspatially growing compressible boundary layer using a new fourier method. In P. R.Voke, L. Kleiser, and J. -P. Chollet, editors, Direct and Large-Eddy Simulation, vol-ume I, pages 249–259. Kluwer Academic Publishers, 1994.
[140] P. Schlatter, N. A. Adams, and L. Kleiser. Periodic boundary treatment for non-periodic flow geometries. J. Comput. Phys., 2003. submitted.
[141] T. Colonius and H. Ran. A super-grid-scale model for simulating compressible flow onunbounded domains. J. Comput. Phys., 182(1):191–212, 2002.
[142] R. Hixon, S.-H Shih, and Reda R. Mankbadi. Evaluation of boundary conditions forcomputational aeroacoustics. AIAA J., 33(11):2006–2012, November 1995.
[143] C. K. W. Tam. Advances in numerical boundary conditions for computational aeroa-coustics. AIAA Paper 97-1774, 1997.
50










![A Parallel Compact Multi-dimensional Numerical … PARALLEL COMPACT MULTI-DIMENSIONAL NUMERICAL ALGORITHM WITH AEROACOUSTICS APPLICATIONS ALEX POVITSKY* AND PHILIP .]. MORRIS ¢ Abstract](https://img.pdfslide.net/doc/110x75/5aeb54fa7f8b9ae5318d9568/a-parallel-compact-multi-dimensional-numerical-parallel-compact-multi-dimensional.jpg)