Embed Size (px)
Citation preview
______ ______
Computed Tomography (part II)
Yao Wang Polytechnic University, Brooklyn, NY 11201
Based on J. L. Prince and J. M. Links, Medical Imaging Signals and Systems, and lecture notes by Prince. Figures are from the textbook.
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 2
Last Lecture • Instrumentation
– CT Generations – X-ray source and collimation – CT detectors
• Image Formation – Line integrals – Parallel Ray Reconstruction
• Radon transform • Back projection • Filtered backprojection • Convolution backprojection • Implementation issues
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 3
This Lecture • Review of Parallel Ray Projection and Reconstruction • Practical implementation with samples • Fan Beam Reconstruction • Signal to Noise in CT
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 4
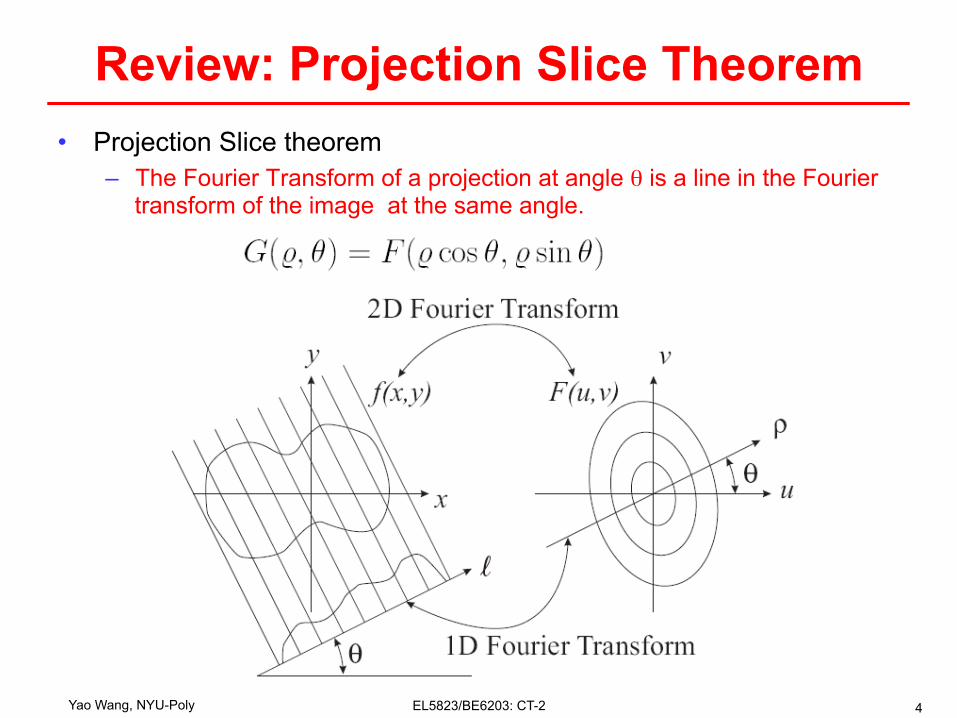
Review: Projection Slice Theorem • Projection Slice theorem
– The Fourier Transform of a projection at angle θ is a line in the Fourier transform of the image at the same angle.
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 5
Reconstruction Algorithm for Parallel Projections
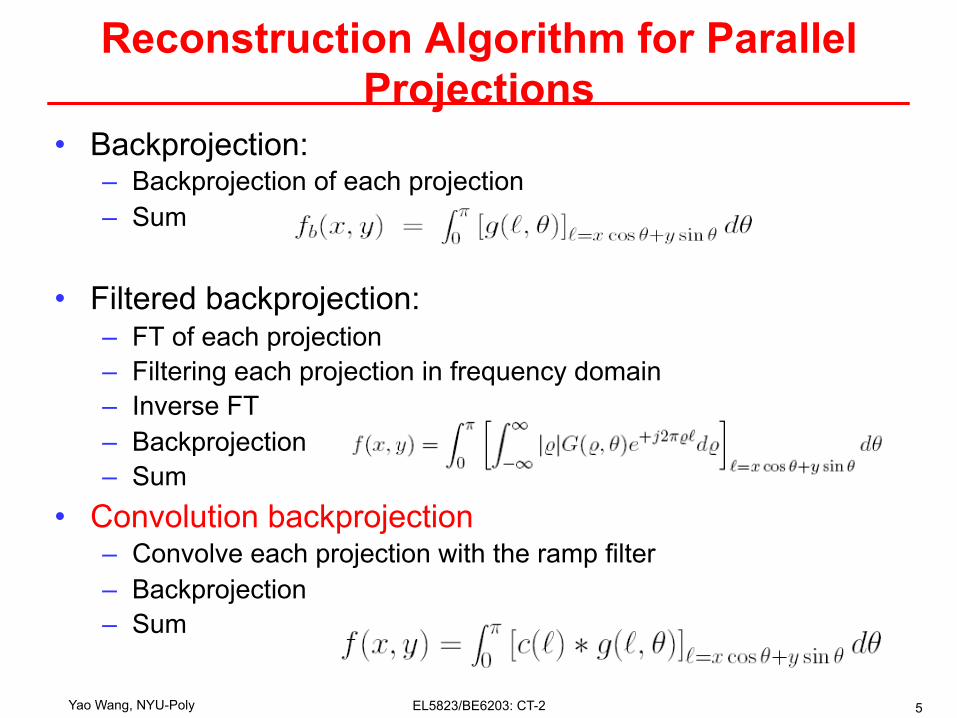
• Backprojection: – Backprojection of each projection – Sum
• Filtered backprojection: – FT of each projection – Filtering each projection in frequency domain – Inverse FT – Backprojection – Sum
• Convolution backprojection – Convolve each projection with the ramp filter – Backprojection – Sum
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 6
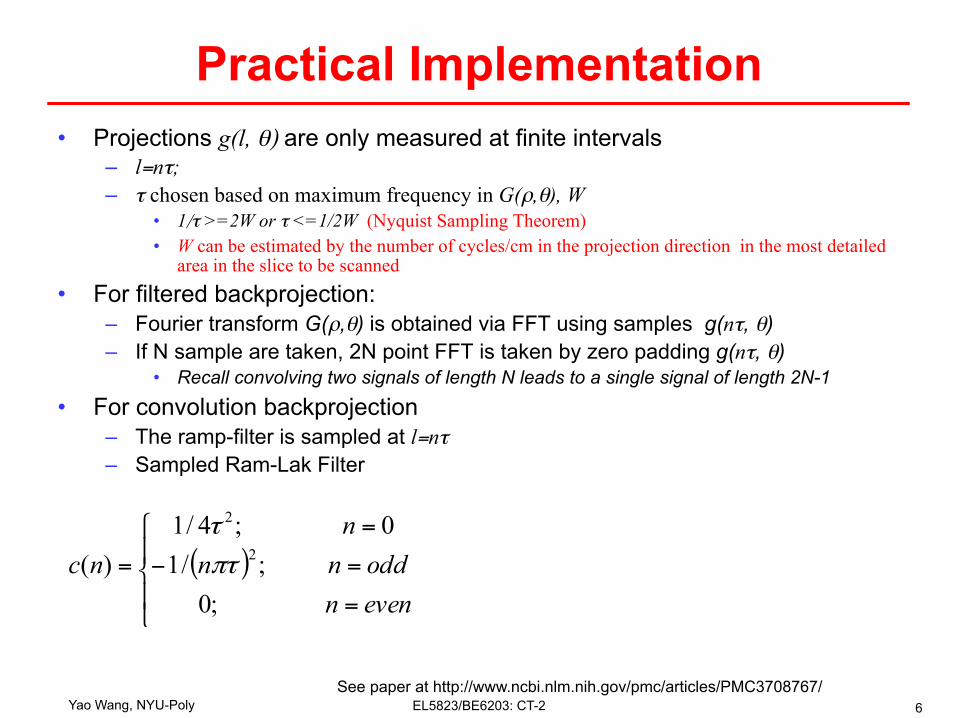
Practical Implementation • Projections g(l, θ) are only measured at finite intervals
– l=nτ; – τ chosen based on maximum frequency in G(ρ,θ), W
• 1/τ >=2W or τ <=1/2W (Nyquist Sampling Theorem)
• W can be estimated by the number of cycles/cm in the projection direction in the most detailed area in the slice to be scanned
• For filtered backprojection: – Fourier transform G(ρ,θ) is obtained via FFT using samples g(nτ, θ) – If N sample are taken, 2N point FFT is taken by zero padding g(nτ, θ)
• Recall convolving two signals of length N leads to a single signal of length 2N-1
• For convolution backprojection – The ramp-filter is sampled at l=nτ – Sampled Ram-Lak Filter
( )⎪⎩
⎪⎨
⎧
=
=−
=
=
evennoddnn
nnc
;0;/1
0;4/1)( 2
2
πτ
τ
See paper at http://www.ncbi.nlm.nih.gov/pmc/articles/PMC3708767/
Practical Implementation of Filter Backprojection
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 7
Shi and Luo BioMedical Engineering OnLine 2013, 12:50 Page 3 of 15http://www.biomedical-engineering-online.com/content/12/1/50
Then the unknown f (x, y) can be reconstructed by the inverse Fourier transform (IFT)or the dual Radon transform as following
f̂ (x, y) =! !
0
! !
"!F(" cos # , " sin #)|"| exp(i2!"(x cos # + y sin #))d"d#
=! !
0
! !
"!S# (")|"| exp(i2!"t)d"d# ,
where f̂ (x, y) denotes the reconstructed image; t = x cos # + y sin # ; |"| is known as
“ramp” filter in the frequency domain. It is well-known that f̂ (x, y) will be identical withf (x, y) almost everywhere according to the properties of FT and IFT.
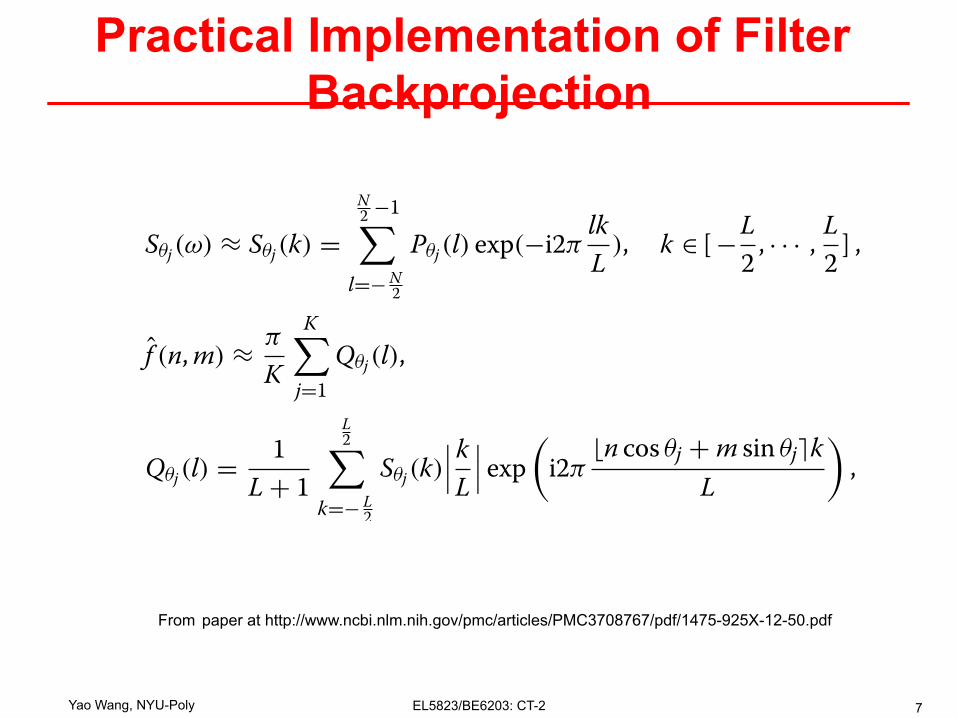
In practice, the projection data and reconstructed images have to be discretized torecord, calculate and display. For the discrete projection data, P#j(l), l # [ "N
2 , · · · , N2 ], the
discrete Fourier transform (DFT) and inverse DFT (IDFT) are employed to approximate(continuous) FT and IFT, respectively. They are
S#j(") $ S#j(k) =N2 "1"
l=" N2
P#j(l) exp("i2!lkL ), k # [ "L
2 , · · · , L2 ] ,
f̂ (n, m) $ !
K
K"
j=1Q#j(l),
Q#j(l) = 1L + 1
L2"
k=" L2
S#j(k)###kL
### exp$
i2!%n cos #j + m sin #j&k
L
%,
(2)
where N is a positive even integer denotes the number of projection data; L is an eveninteger that is equal to or larger than the maximum number of the discrete projectiondata at all directions; %x& denotes the nearest integer of x; #j, j # [1, · · · , K], denote thediscretized scanning angle, and K is the number of the scanning angles. The discretizedramp filter, | k
L |, is named as the reconstruction filter in this paper.For the continuous systems, Radon and inverse Radon transforms are solid and per-
fect in the mathematics principle [8-10]. However, it necessarily produces non-negligibledegradation when the projection data are discrete (finite) and Radon and inverse Radontransforms have to be discretized in calculation. Many scholars have studied this prob-lem. In [15], a multilevel back-projection method had been presented to improve thecomputational speed. The point-spread-function (PSF) convolution techniques had beenproposed to reduce blurring. By those approaches the image quality was similar with orsuperior to that using the standard FBP technique. In [16], the spline interpolation andramp filtering had been combined to improve the standard FBP algorithm, by which theimage quality could also be improved somewhat.
The question can be summarized as how to reduce the degradation caused by the dis-cretizing process. Since the degradation cannot be removed completely, the questioncan also be simplified as how to design the optimal reconstruction filter for the discreteinverse Radon transform. In this paper, we try to solve this question in a quite differ-ent way. First, the discrete image model and discrete projection model are employed insimulating the scanning procedure. The DFT of projection data is regarded as a special
From paper at http://www.ncbi.nlm.nih.gov/pmc/articles/PMC3708767/pdf/1475-925X-12-50.pdf
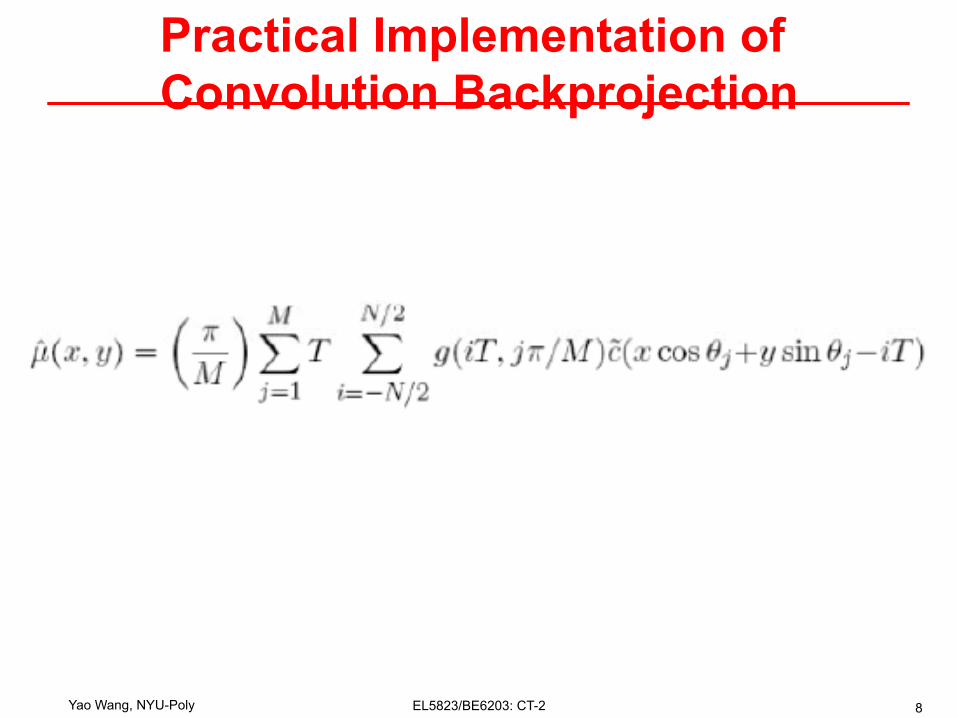
Practical Implementation of Convolution Backprojection
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 8
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 9
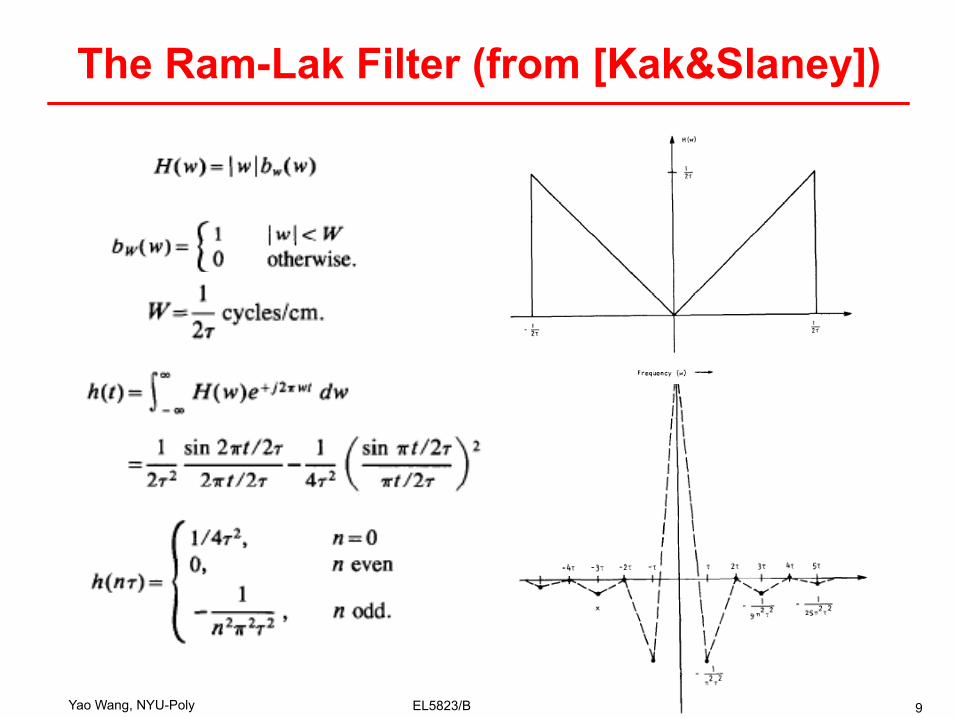
The Ram-Lak Filter (from [Kak&Slaney])
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 10
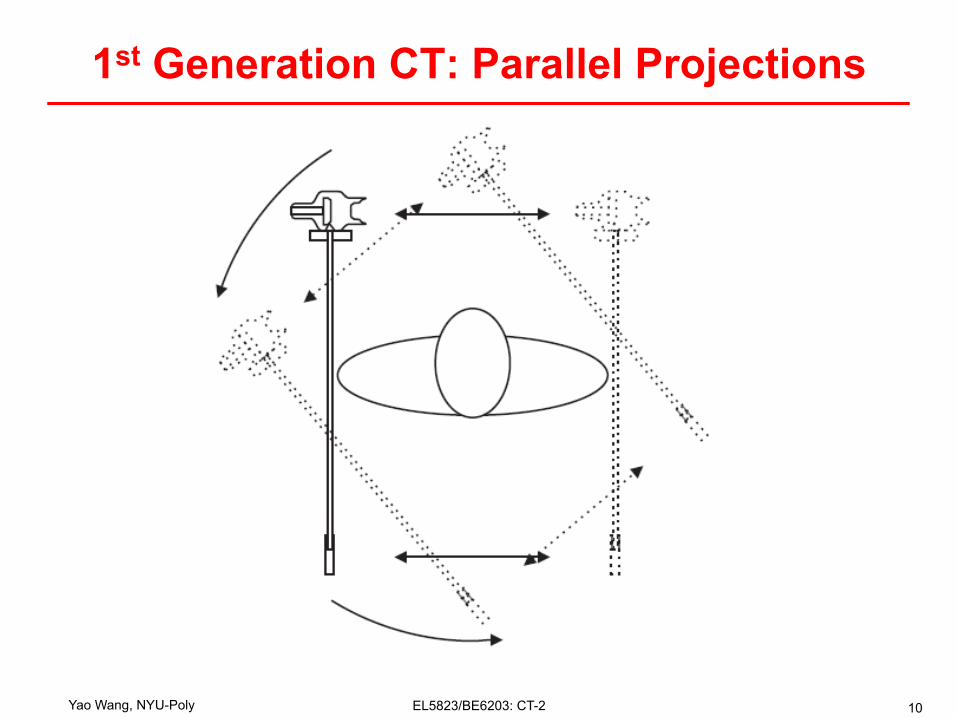
1st Generation CT: Parallel Projections
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 11
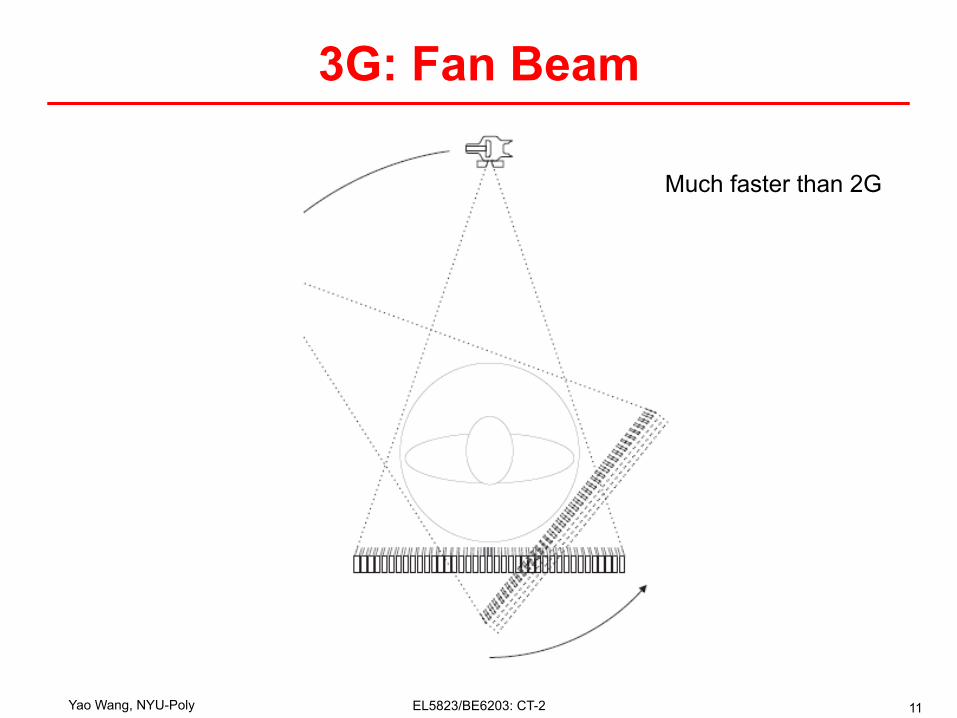
3G: Fan Beam
Much faster than 2G
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 12
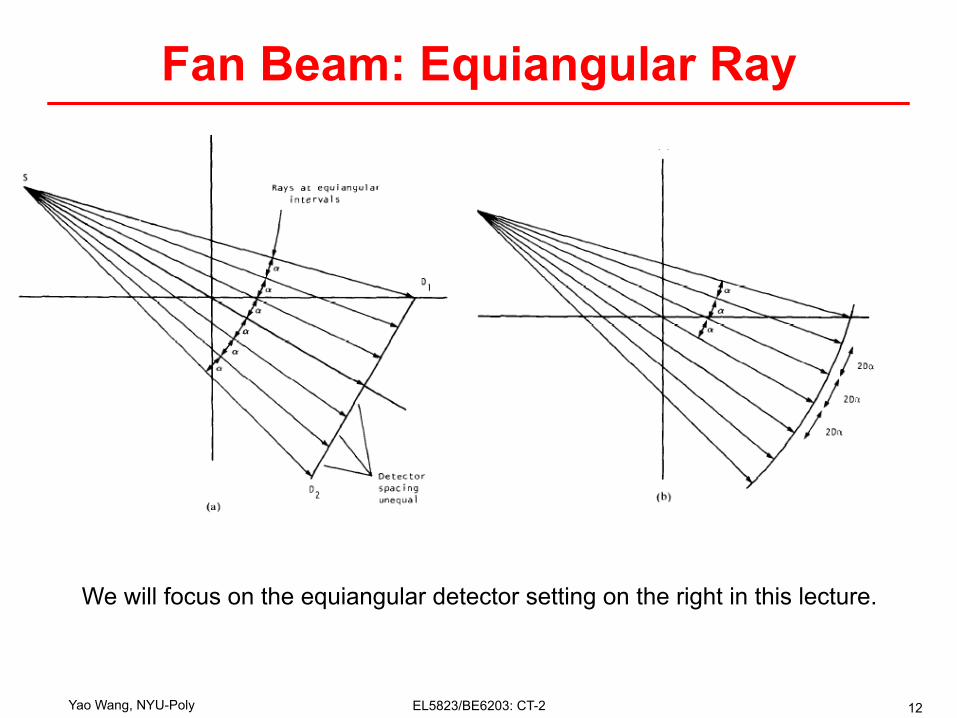
Fan Beam: Equiangular Ray
We will focus on the equiangular detector setting on the right in this lecture.
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 13
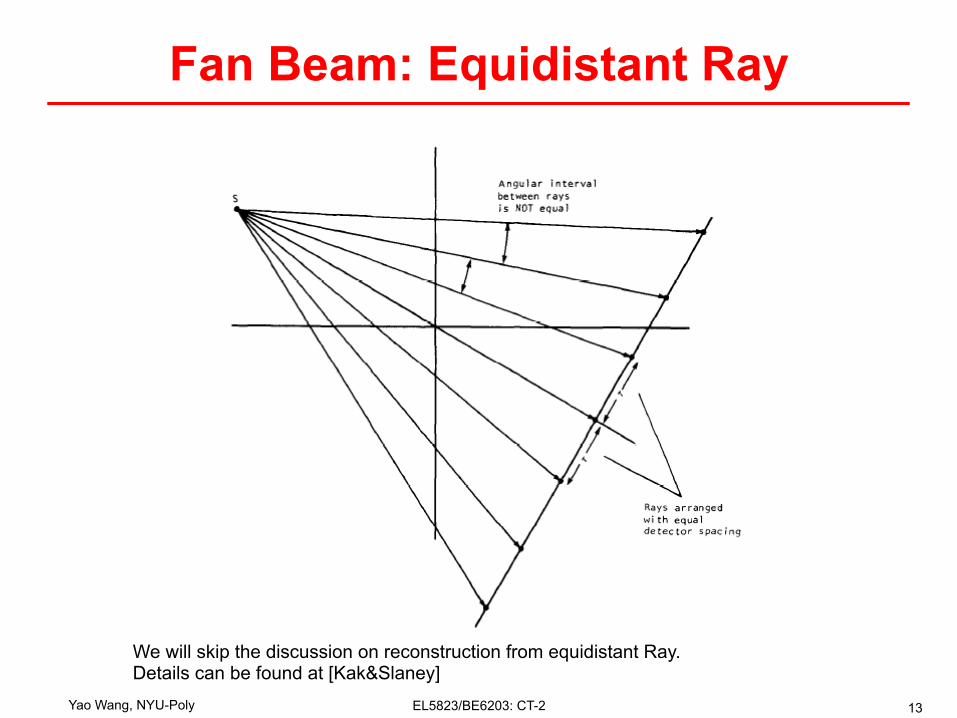
Fan Beam: Equidistant Ray
We will skip the discussion on reconstruction from equidistant Ray. Details can be found at [Kak&Slaney]
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 14
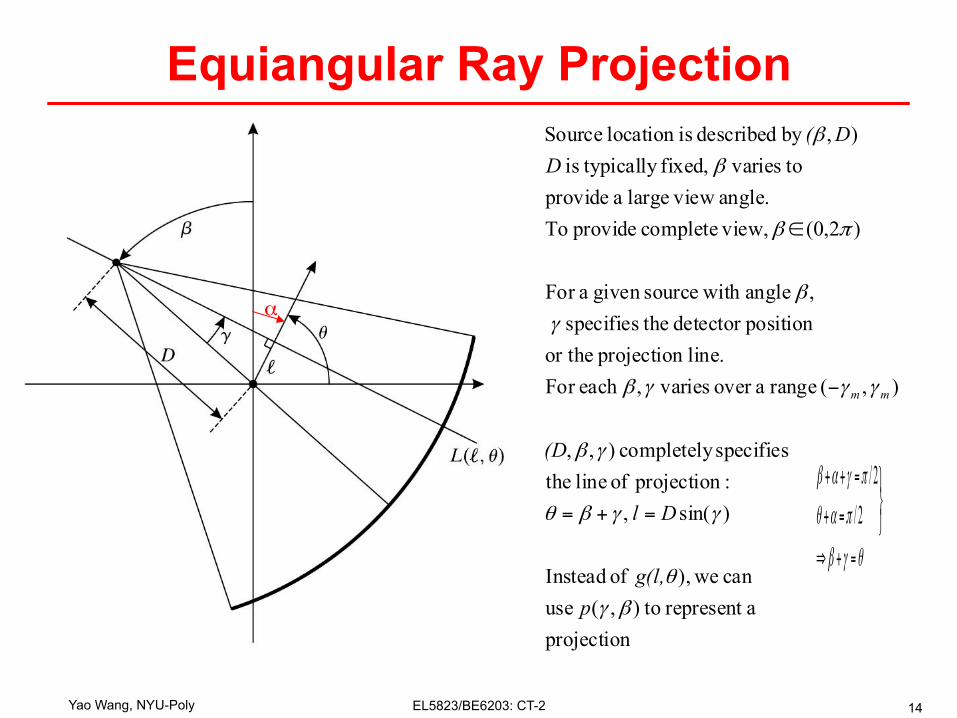
Equiangular Ray Projection
projection arepresent to),( use
can we), of Instead
)sin(,:projection of line the
specifies completely ),,
),( range aover varies,each For line. projection or the
position detector thespecifies , angle with sourcegiven aFor
)2,0( view,complete provide Toangle. viewlarge a provide
to varies fixed, typicallyis ),by described islocation Source
βγ
θ
γγβθ
γβ
γγγβ
γ
β
πβ
β
β
pg(l,
Dl
(D
DD(
mm
=+=
−
∈
θγβ
παθ
πγαβ
=+⇒⎭⎬⎫
=+
=++
2/2/
α
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 15
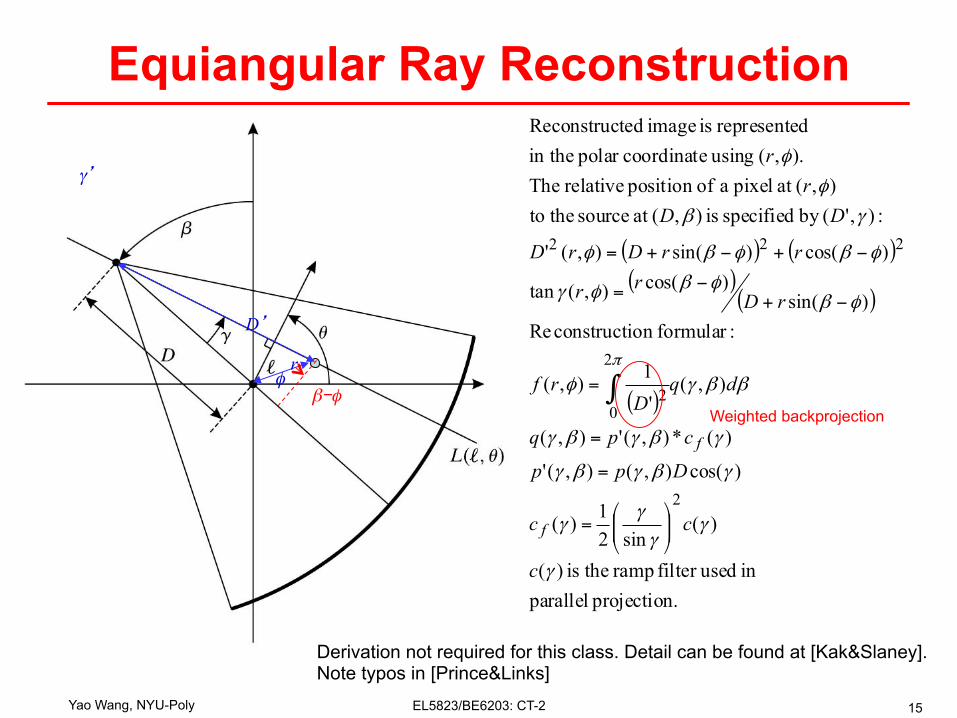
Equiangular Ray Reconstruction
D’
r φ
( ) ( )( )
( )
( )
.projection parallelin usedfilter ramp theis )(
)(sin2
1)(
)cos(),(),('
)(*),('),(
),('
1),(
:formularon constructiRe)sin(
)cos(),(tan
)cos()sin(),('
:),'(by specified is ),(at source theto),(at pixel a ofposition relative The
).,( using coordinatepolar in thedrepresente is image tedReconstruc
2
2
02
222
γ
γγ
γγ
γβγβγ
γβγβγ
ββγφ
φβφβφγ
φβφβφ
γβ
φ
φ
π
c
cc
Dpp
cpq
dqD
rf
rDrr
rrDrD
DDr
r
f
f
⎟⎟⎠
⎞⎜⎜⎝
⎛=
=
=
=
−+−=
−+−+=
∫
γ’
Derivation not required for this class. Detail can be found at [Kak&Slaney]. Note typos in [Prince&Links]
β-φ Weighted backprojection
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 16
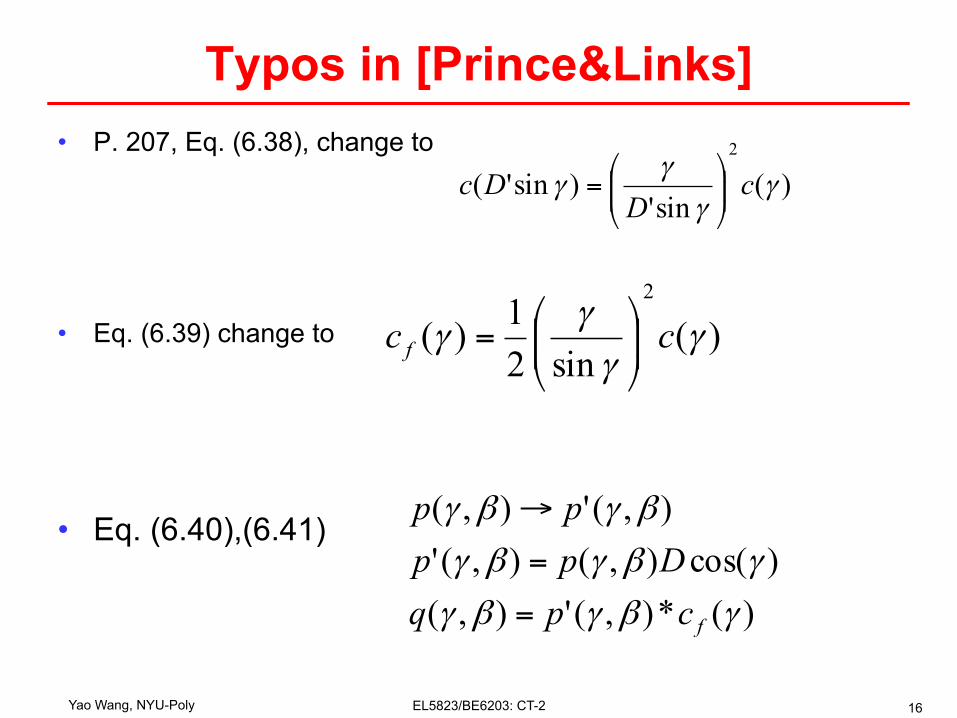
Typos in [Prince&Links] • P. 207, Eq. (6.38), change to
• Eq. (6.39) change to
• Eq. (6.40),(6.41)
)(sin'
)sin'(2
γγ
γγ c
DDc ⎟⎟
⎠
⎞⎜⎜⎝
⎛=
)(sin2
1)(2
γγ
γγ cc f ⎟⎟
⎠
⎞⎜⎜⎝
⎛=
)(*),('),()cos(),(),('
),('),(
γβγβγ
γβγβγ
βγβγ
fcpqDpp
pp
=
=
→
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 17
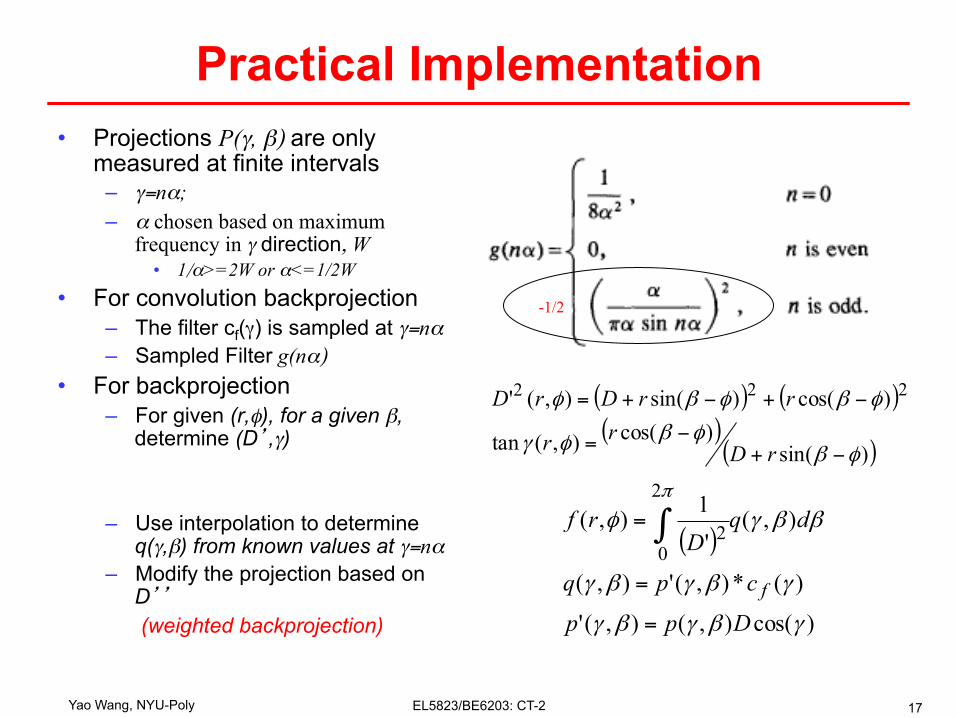
Practical Implementation • Projections P(γ, β) are only
measured at finite intervals – γ=nα; – α chosen based on maximum
frequency in γ direction, W • 1/α>=2W or α<=1/2W
• For convolution backprojection – The filter cf(γ) is sampled at γ=nα – Sampled Filter g(nα)
• For backprojection – For given (r,φ), for a given β,
determine (D’,γ)
– Use interpolation to determine q(γ,β) from known values at γ=nα
– Modify the projection based on D’’
(weighted backprojection)
( ) ( )( )
( ))sin()cos(),(tan
)cos()sin(),(' 222
φβφβφγ
φβφβφ
−+−=
−+−+=
rDrr
rrDrD
( )
)cos(),(),('
)(*),('),(
),('1),(
2
02
γβγβγ
γβγβγ
ββγφπ
Dpp
cpq
dqD
rf
f
=
=
= ∫
-1/2
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 18
Matlab Functions for Fan Beam CT • Relevant functions:
– fanbeam(), ifanbeam()

Yao Wang, NYU-Poly EL5823/BE6203: CT-2 19
CT Quality Evaluation • Blurring Effect • SNR

Yao Wang, NYU-Poly EL5823/BE6203: CT-2 20
Effect of Area Detector • Practical detector integrates the detected photons over
an area • Mathematically, the detector can be characterized by an
indicator function s(l) (aka impulse response) • The measured projection g’(l,θ) is related to “real”
projection g(l,θ) by – g’(l,θ)= g(l,θ) * s(l) – G’(ρ,θ)= G(ρ,θ) S(ρ)
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 21
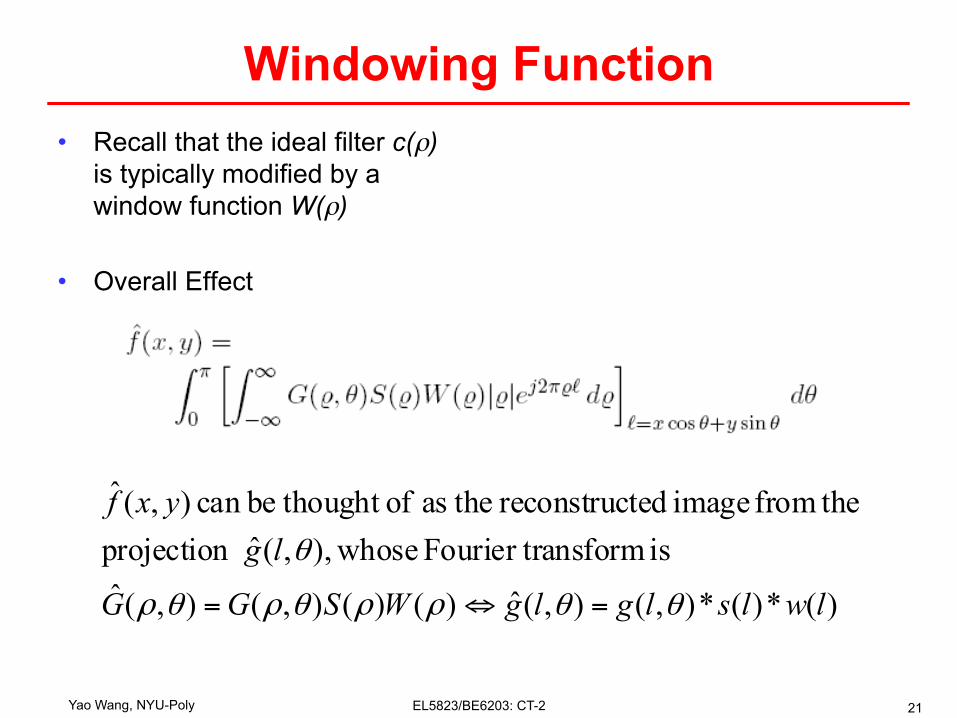
Windowing Function • Recall that the ideal filter c(ρ)
is typically modified by a window function W(ρ)
• Overall Effect
)(*)(*),(),(ˆ)()(),(),(ˆ is ansformFourier tr whose),,(ˆ projection
thefrom image tedreconstruc theas of thought becan ),(ˆ
lwlslglgWSGG
lgyxf
θθρρθρθρ
θ
=⇔=
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 22
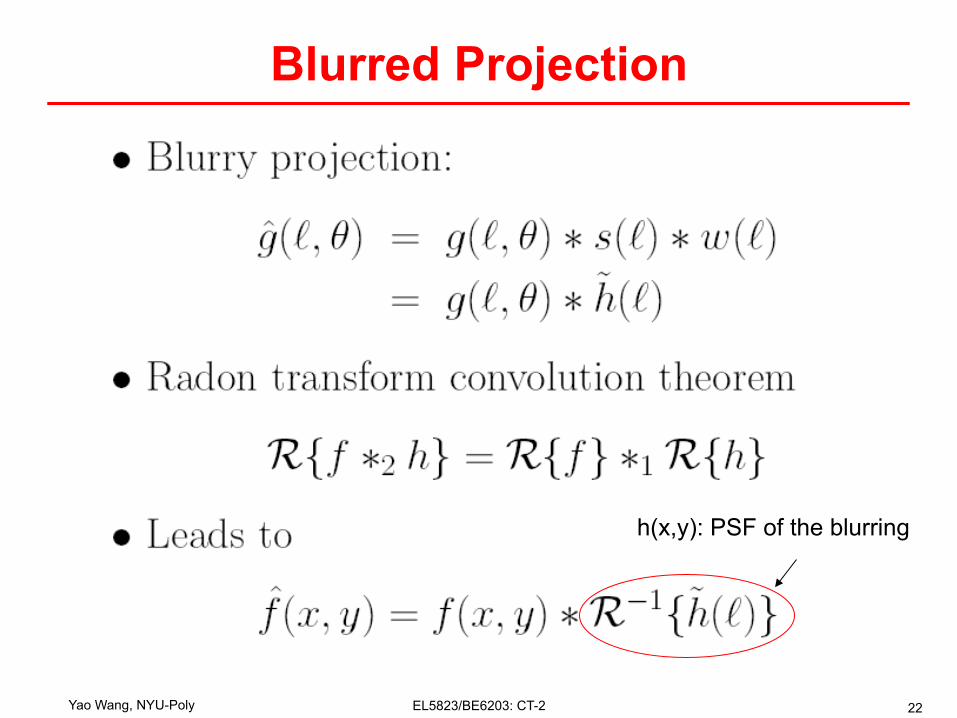
Blurred Projection
h(x,y): PSF of the blurring
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 23
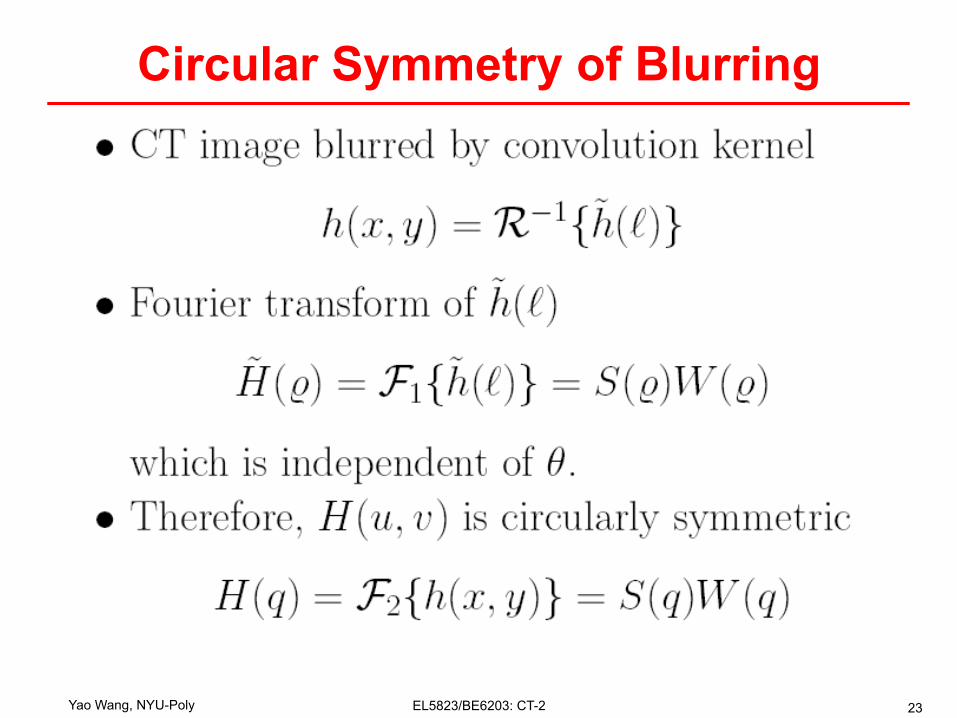
Circular Symmetry of Blurring
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 24
PSF given by Hankel Transform
222 yxr +=
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 25
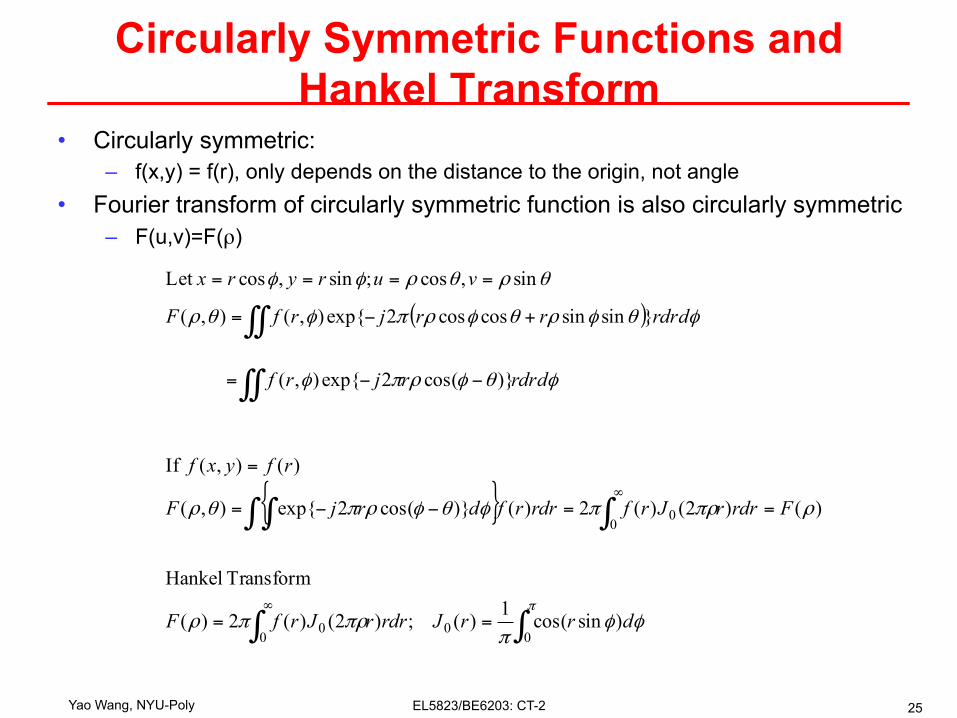
Circularly Symmetric Functions and Hankel Transform
• Circularly symmetric: – f(x,y) = f(r), only depends on the distance to the origin, not angle
• Fourier transform of circularly symmetric function is also circularly symmetric – F(u,v)=F(ρ)
( )
{ }
∫∫
∫∫ ∫
∫∫
∫∫
==
==−−=
=
−−=
+−=
====
∞
∞
πφφ
ππρπρ
ρπρπφθφρπθρ
φθφρπφ
φθφρθφρπφθρ
θρθρφφ
00
00
00
)sincos(1)(;)2()(2)(
Transform Hankel
)()2()(2)()}cos(2exp{),(
)(),( If
)}cos(2exp{),(
}sinsincoscos2exp{),(),(
sin,cos;sin,cosLet
drrJrdrrJrfF
FrdrrJrfrdrrfdrjF
rfyxf
rdrdrjrf
rdrdrrjrfF
vuryrx
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 26
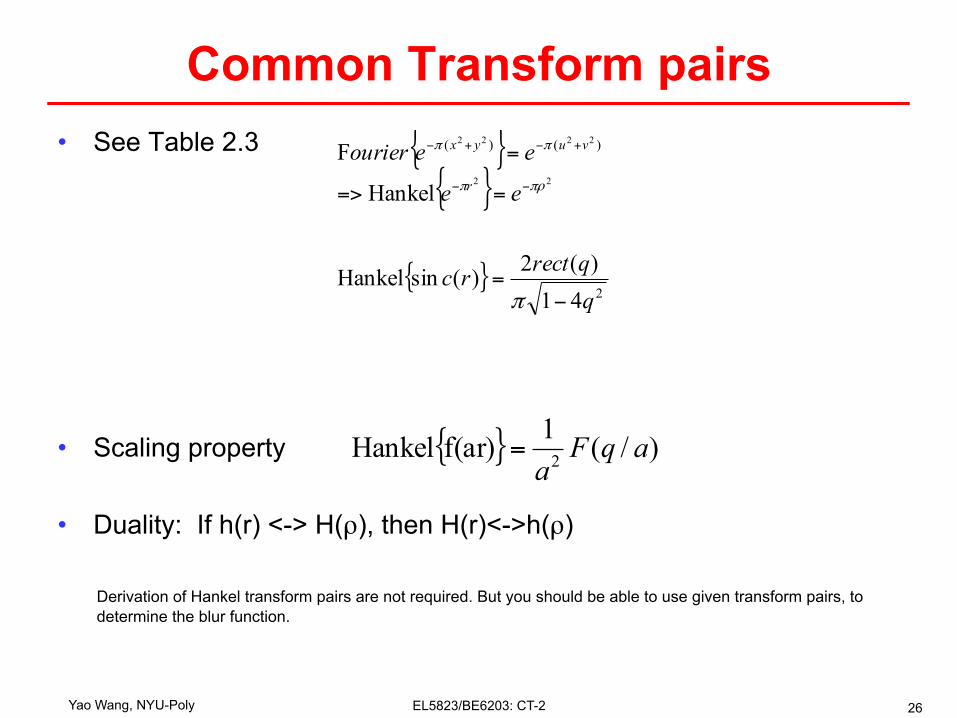
Common Transform pairs • See Table 2.3
• Scaling property
• Duality: If h(r) <-> H(ρ), then H(r)<->h(ρ)
{ } )/(1f(ar)Hankel 2 aqFa
=
{ }{ }
{ }2
)()(
41)(2)(sinHankel
Hankel
F22
2222
qqrectrc
ee
eeourierr
vuyx
−=
==>
=−−
+−+−
π
πρπ
ππ
Derivation of Hankel transform pairs are not required. But you should be able to use given transform pairs, to determine the blur function.
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 27
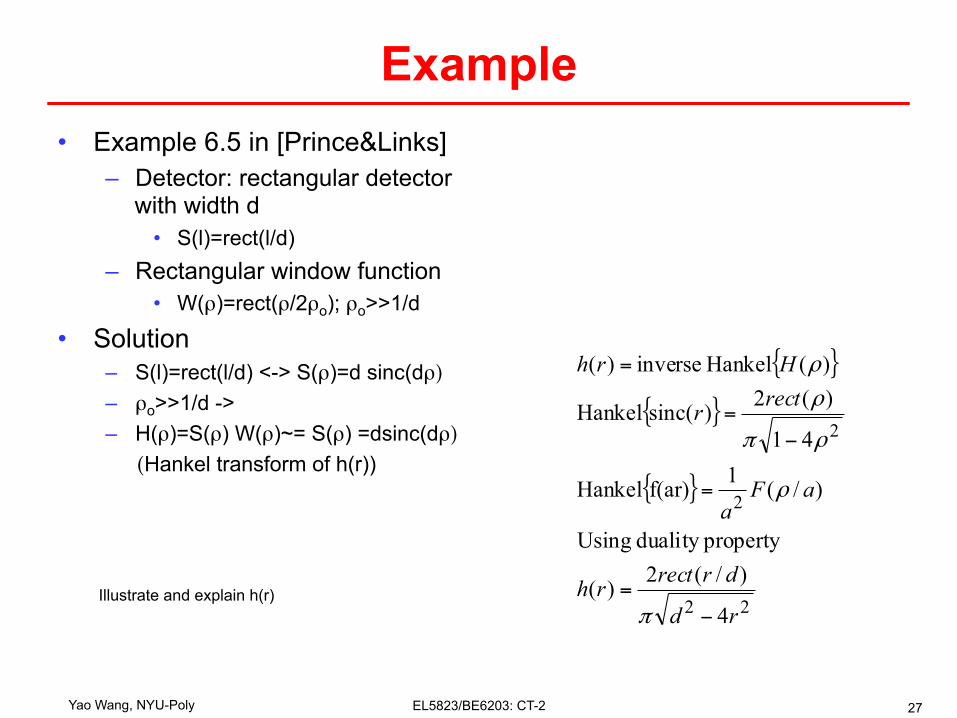
Example • Example 6.5 in [Prince&Links]
– Detector: rectangular detector with width d
• S(l)=rect(l/d) – Rectangular window function
• W(ρ)=rect(ρ/2ρo); ρo>>1/d
• Solution – S(l)=rect(l/d) <-> S(ρ)=d sinc(dρ)
– ρo>>1/d -> – H(ρ)=S(ρ) W(ρ)~= S(ρ) =dsinc(dρ)
(Hankel transform of h(r))
{ }
{ }
{ }
22
2
2
4
)/(2)(
propertyduality Using
)/(1f(ar)Hankel
41
)(2)(sincHankel
)(Hankel inverse)(
rd
drrectrh
aFa
rectr
Hrh
−=
=
−=
=
π
ρ
ρπ
ρ
ρ
Illustrate and explain h(r)
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 28
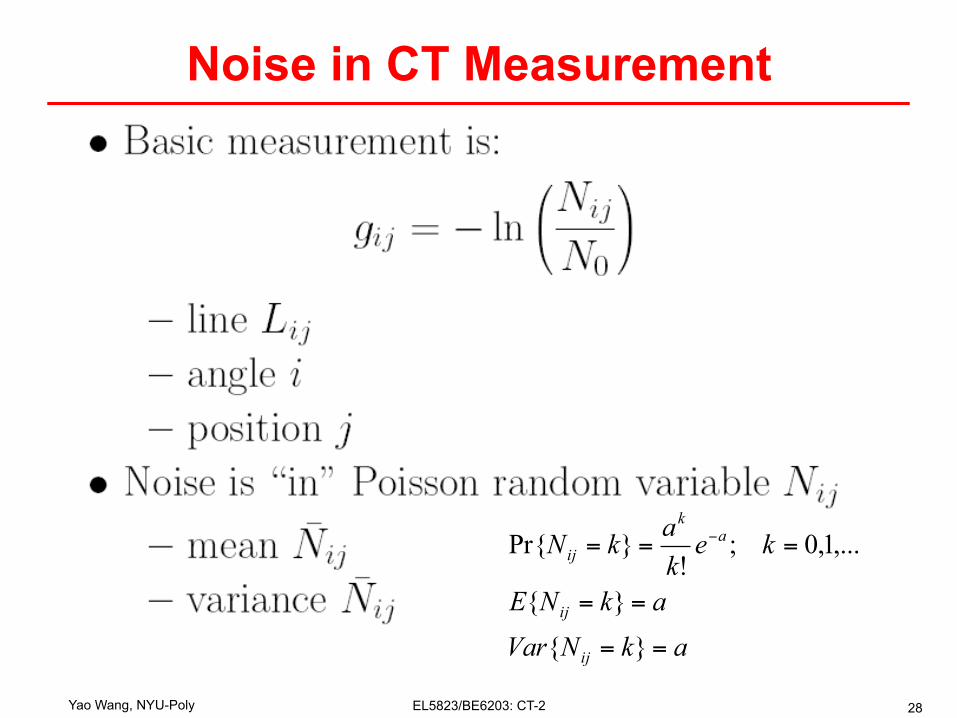
Noise in CT Measurement
akNVarakNE
kekakN
ij
ij
ak
ij
==
==
=== −
}{
}{
,...1,0;!
}Pr{
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 29
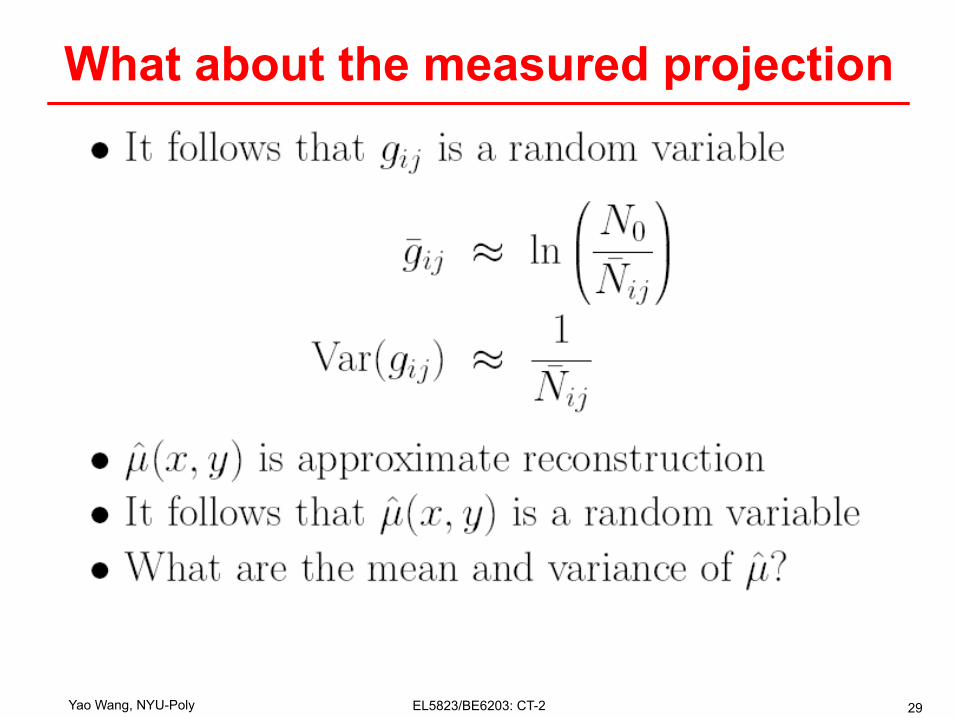
What about the measured projection
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 30
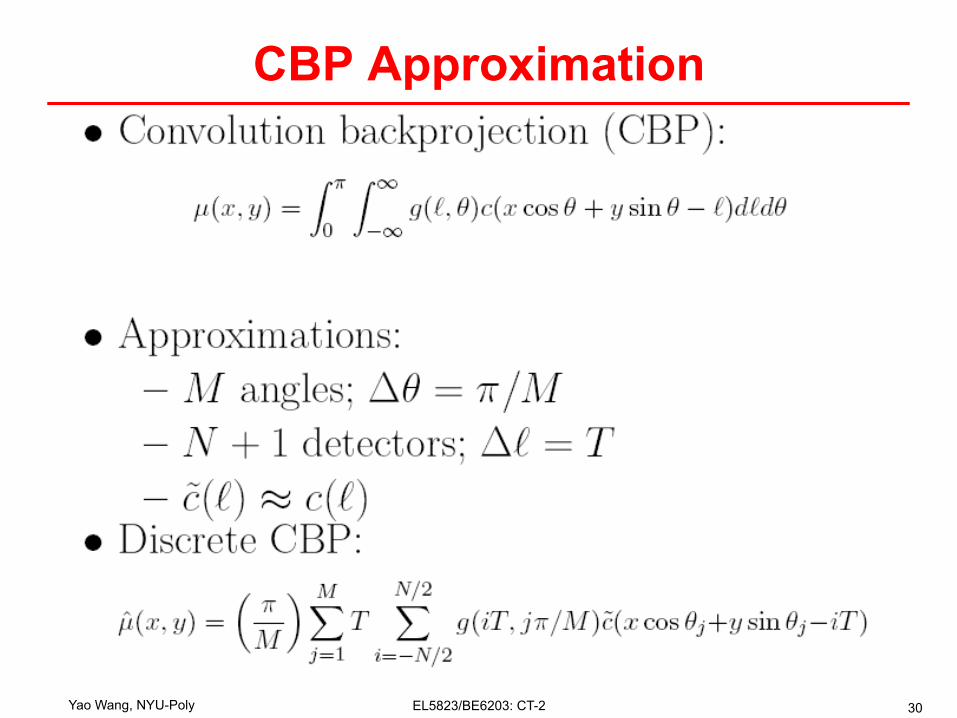
CBP Approximation
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 31
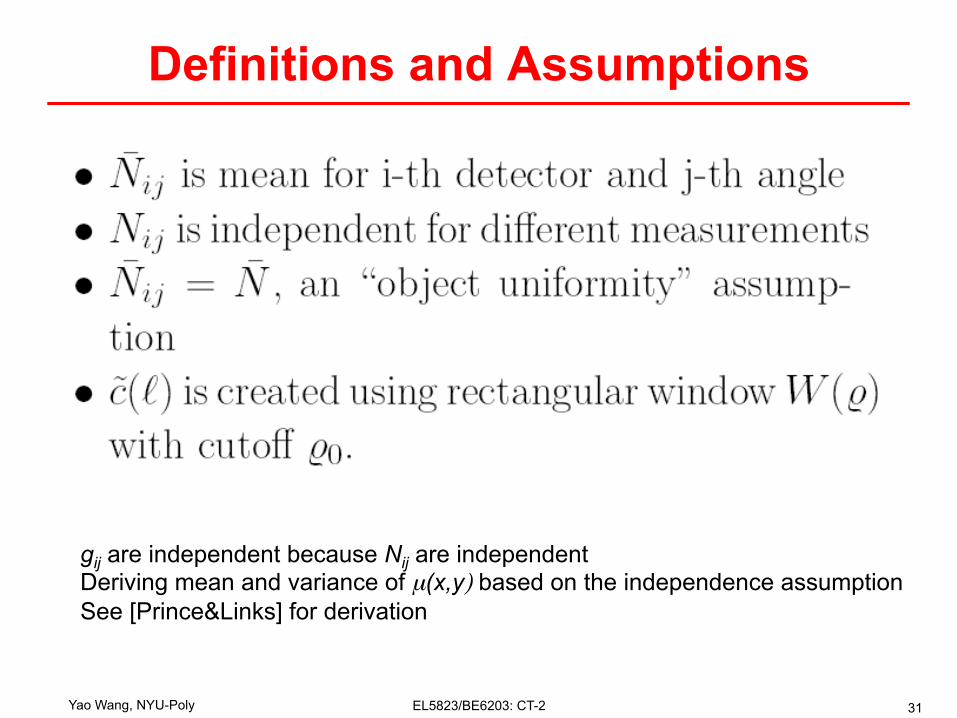
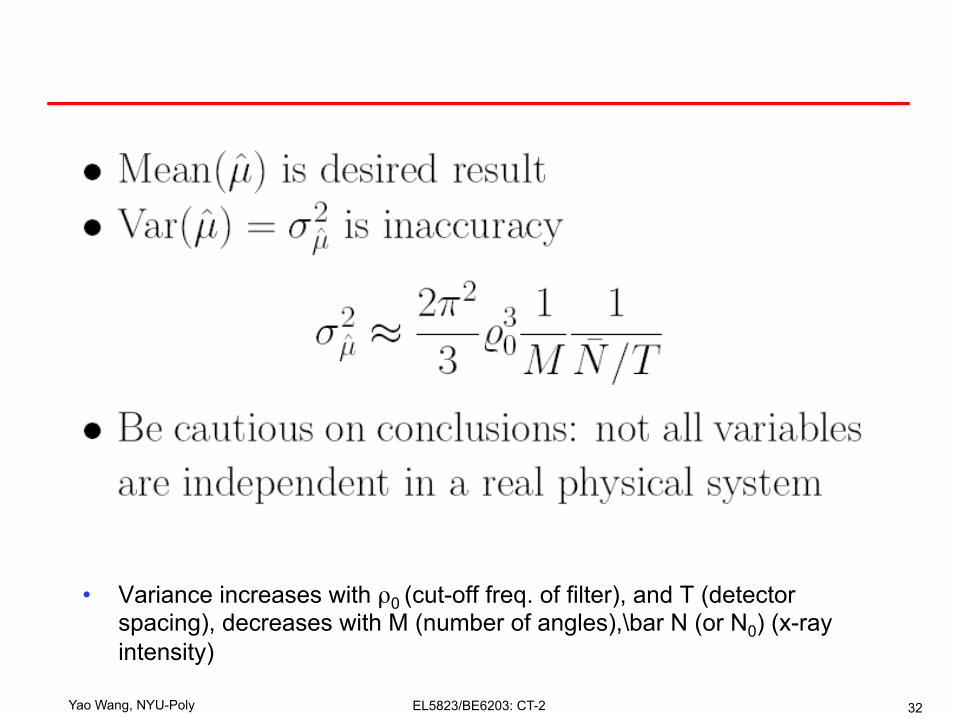
Definitions and Assumptions
gij are independent because Nij are independent Deriving mean and variance of µ(x,y) based on the independence assumption See [Prince&Links] for derivation
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 32
• Variance increases with ρ0 (cut-off freq. of filter), and T (detector spacing), decreases with M (number of angles),\bar N (or N0) (x-ray intensity)
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 33
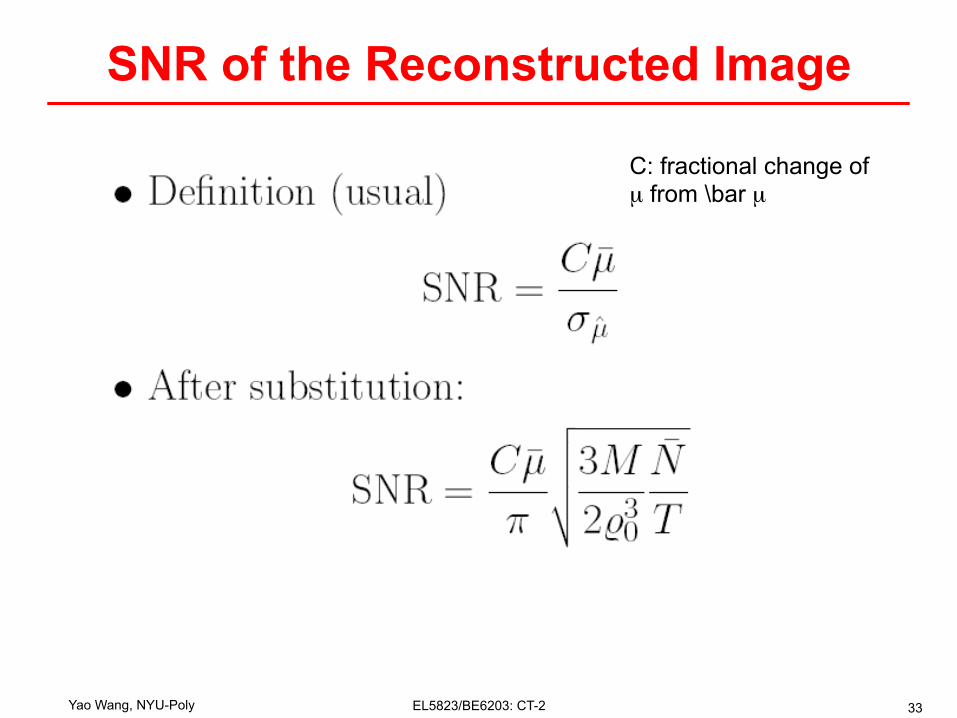
SNR of the Reconstructed Image
C: fractional change of µ from \bar µ
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 34
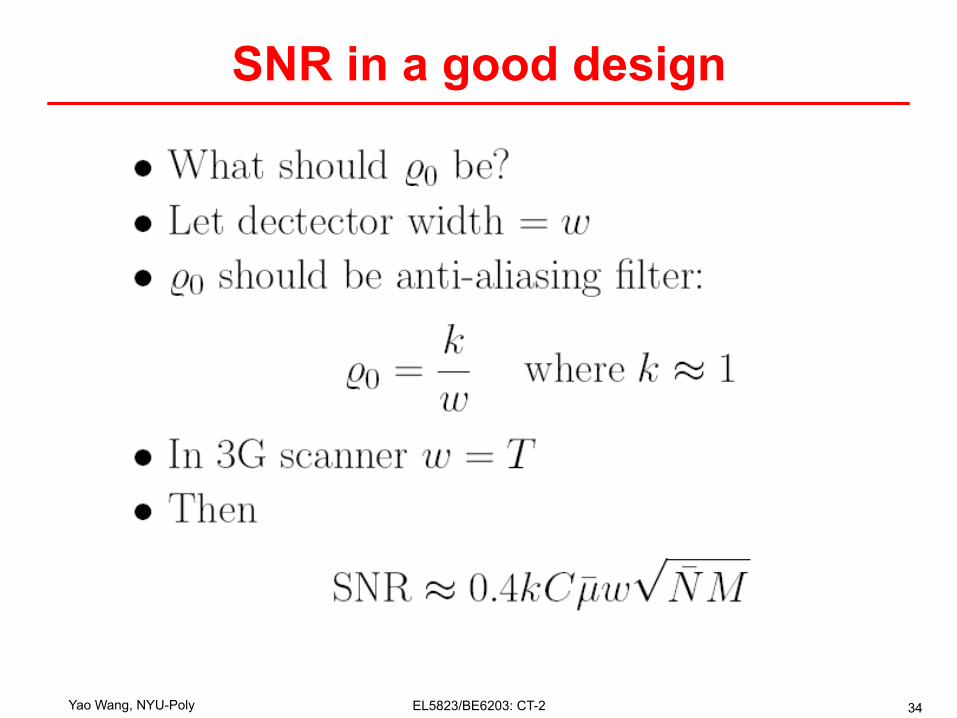
SNR in a good design
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 35
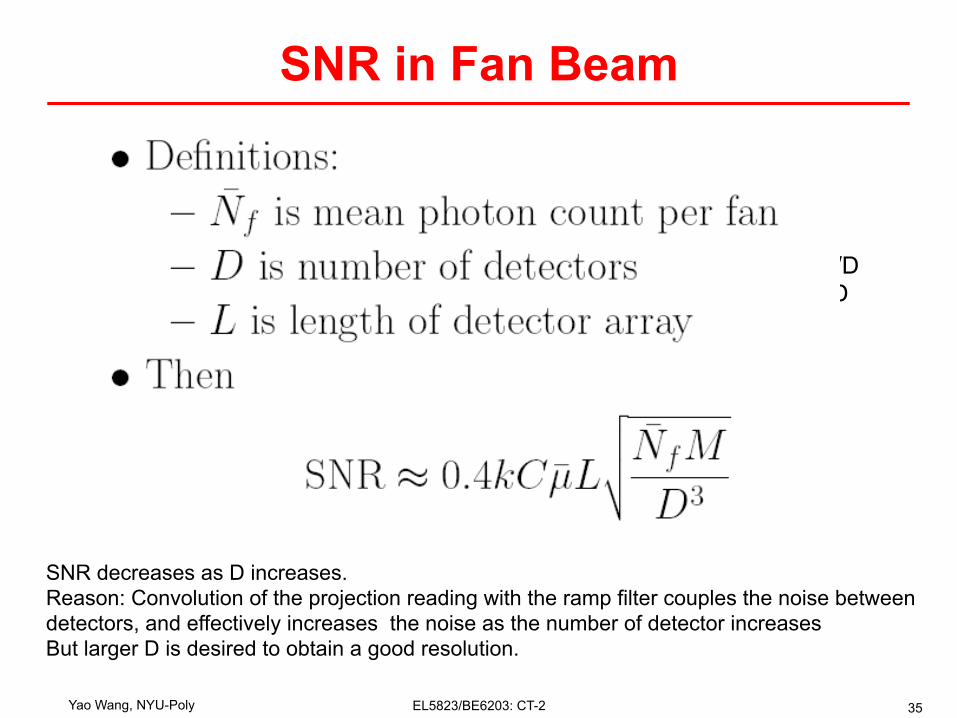
SNR in Fan Beam
N=Nf/D w=L/D
SNR decreases as D increases. Reason: Convolution of the projection reading with the ramp filter couples the noise between detectors, and effectively increases the noise as the number of detector increases But larger D is desired to obtain a good resolution.

Yao Wang, NYU-Poly EL5823/BE6203: CT-2 36
Rule of Thumb
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 37
Aliasing Artifacts • Nyquist Sampling theorem:
– If the maximum freq of a signal is fmax, it should be sampled with a freq fs>=2max, or sampling interval T<=1/2fmax
– If sampled at a lower freq. without pre-filtering, aliasing will occur • High freq. content fold over to low freq
– Prefilter to lower fmax, and then sample
• If the number of samples in each projection (D) or the number of projection angles (M) are not sufficiently dense, the reconstructed image will have streak artifacts – Caused by aliasing – Practical detectors are area detectors and perform pre-filtering
implicitly

Yao Wang, NYU-Poly EL5823/BE6203: CT-2 38
From [Kak&Slaney] Fig. 5.1
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 39
Summary • Parallel projection reconstruction
– Backprojection summation – Fourier method (projection slice theorem) – Filtered backprojection – Convolution backprojection – Practical implementation: using finite samples
• Fan beam projection and reconstruction – Weighted backprojection
• Blurring due to non-ideal filters and detectors – Approximate the overall effect by a filter:
• h(l)=w(l)*s(l); H(ρ)=W(ρ) S(ρ) – Circularly symmetric functions and Hankel transform
• Equivalent spatial domain filter h(r)=inverse Hankel {H(q)} • Noise in measurement and reconstructed image
– Factors influencing the SNR of reconstructed image • Average X-ray intensity, Number of angles (M), number of samples per angle (D), filter
cut-off ρo
• Impact of number of projection angles and samples on reconstruction image quality
– Nyquist sampling theorem – Streak artifacts
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 40
Reference • Prince and Links, Medical Imaging Signals and Systems, Chap 6. • A. C. Kak and M. Slaney, Principles of Computerized Tomographic Imaging.
Originally published by IEEE, 1998. E-copy available at http://www.slaney.org/pct/
– Chap 3 Contain detailed derivation of reconstruction algorithms both for parallel and fan beam projections. Have discussions both in continuous domain and implementation with sampled discrete signals.
– Chap 5 discusses noise in measurement and reconstructed image. – Chap 5 also covers aliasing effect with more mathematical interpretations
• A useful lecture note from Prof. Fessler – http://web.eecs.umich.edu/~fessler/course/516/l/c-tomo.pdf
• Lecture note by Prof. Parra – http://bme.ccny.cuny.edu/faculty/parra/teaching/med-imaging/lecture4.pdf – http://bme.ccny.cuny.edu/faculty/parra/teaching/med-imaging/lecture5.pdf
• For more discussion on aliasing due to under sampling – https://engineering.purdue.edu/~malcolm/pct/CTI_Ch05.pdf
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 41
Homework • Reading:
– Prince and Links, Medical Imaging Signals and Systems, Chap 6, Sec.6.3.4-6.5
• Note down all the corrections for Ch. 6 on your copy of the textbook based on the provided errata.
• Problems for Chap 6 of the text book: – P.6.9 – P.6.10 (part e is not required) – P.6.13.
• Hint: solution for part (a) should be
– P.6.17 – P.6.19 – P.6.20
( )( )
⎪⎩
⎪⎨
⎧
≤≤−
≤≤−+
=
otherwiseallalala
lg0
2/02/302/2/3
)60,( µ
µ
Yao Wang, NYU-Poly EL5823/BE6203: CT-2 42
Computer Assignment 1. Learn how do ‘fanbeam’.’ifanbeam’ work; summarize their
functionalities. Type ‘demos’ on the command line, then select ‘toolbox -> image processing -> transform -> reconstructing an image from projection data’. Alternatively, you can use ‘help’ for each particular function.
2. Write a MATLAB program that 1) generate a phantom image (you can use a standard phantom provided by MATLAB or construct your own), 2) produce equiangular fan beam projections; 3) reconstruct the phantom using filtered backprojection algorithm; Your program should allow the user to specify the number of fan beams, and the number of projections per fan beam, the angular spacing between the projections. Run your program with different number of projections for the same view angle, and with different view angles, and compare the quality. Use the same filter and interpolation algorithm for all the comparisons. Compare the reconstructed image quality obtained with different number of view angles and number of projections per view angle. Also, compare the image quality with those obtained with parallel projections for the same phantom image when the same total number of measurements are used (from your last assignment). You can use the “fanbeam()” and “ifanbeam()” functions in MATLAB.