Embed Size (px)
Citation preview
CS100433
2D and 3D TransformationJunqiao Zhao 赵君峤
Department of Computer Science and Technology
College of Electronics and Information Engineering
Tongji University
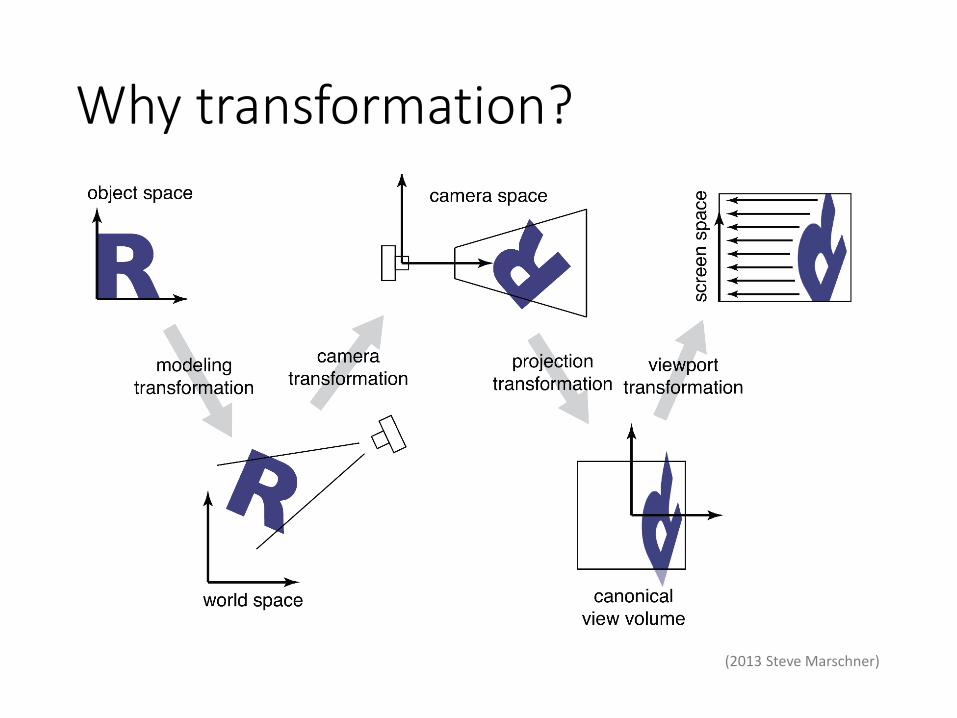
Why transformation?
(2013 Steve Marschner)
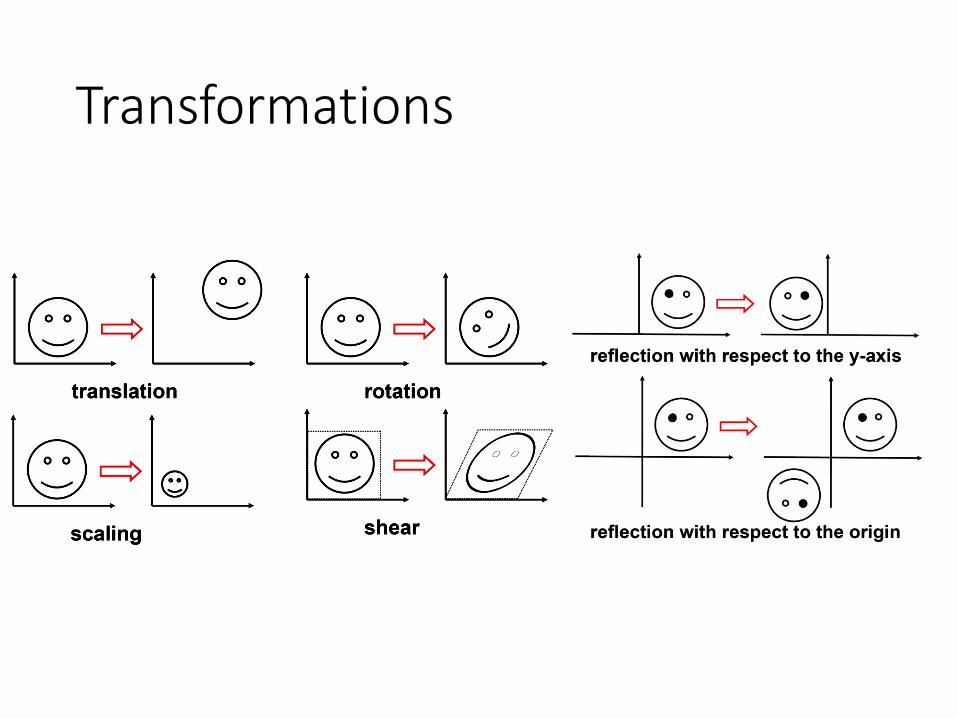
Transformations
Translation
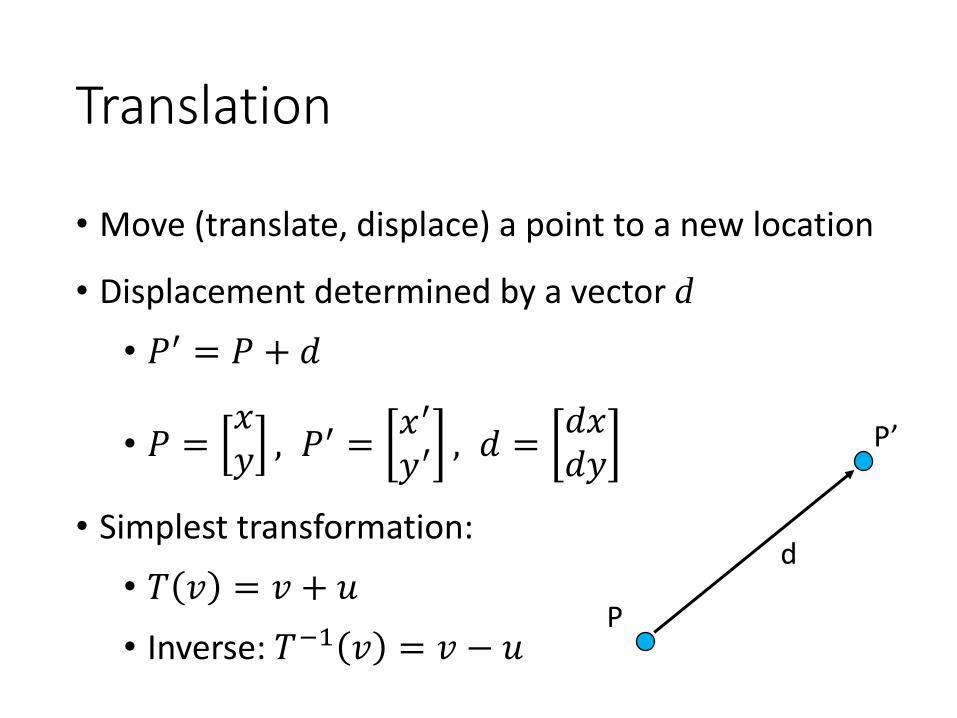
• Move (translate, displace) a point to a new location
• Displacement determined by a vector d
• 𝑃′ = 𝑃 + 𝑑
• 𝑃 =𝑥𝑦 , 𝑃′ =
𝑥′
𝑦′, 𝑑 =
𝑑𝑥𝑑𝑦
• Simplest transformation:
• 𝑇 𝑣 = 𝑣 + 𝑢
• Inverse: 𝑇−1 𝑣 = 𝑣 − 𝑢P
P’
d
Linear Transformations
• Such transformations are linear:• 𝑇 𝑣 + 𝑢 = 𝑇(𝑣) + 𝑇(𝑢)
• 𝑇 𝛼𝑣 = 𝛼𝑇(𝑣)
• 𝑇 𝛼𝑣 + 𝛽𝑢 = 𝛼𝑇 𝑣 + 𝛽𝑇(𝑢)
• Linear Transformations can be represented in matrix form
• Rotation, scale, shear, reflection are all linear
• Is translation linear?
2D Linear Transformations
• 𝑇 𝑣 = 𝑀𝑣 =𝑎 𝑏𝑐 𝑑
𝑥𝑦
𝑣
• M is a 2x2 transformation matrix• Uniform scale
• Non-uniform scale
• Rotation
• Shear
• Reflection
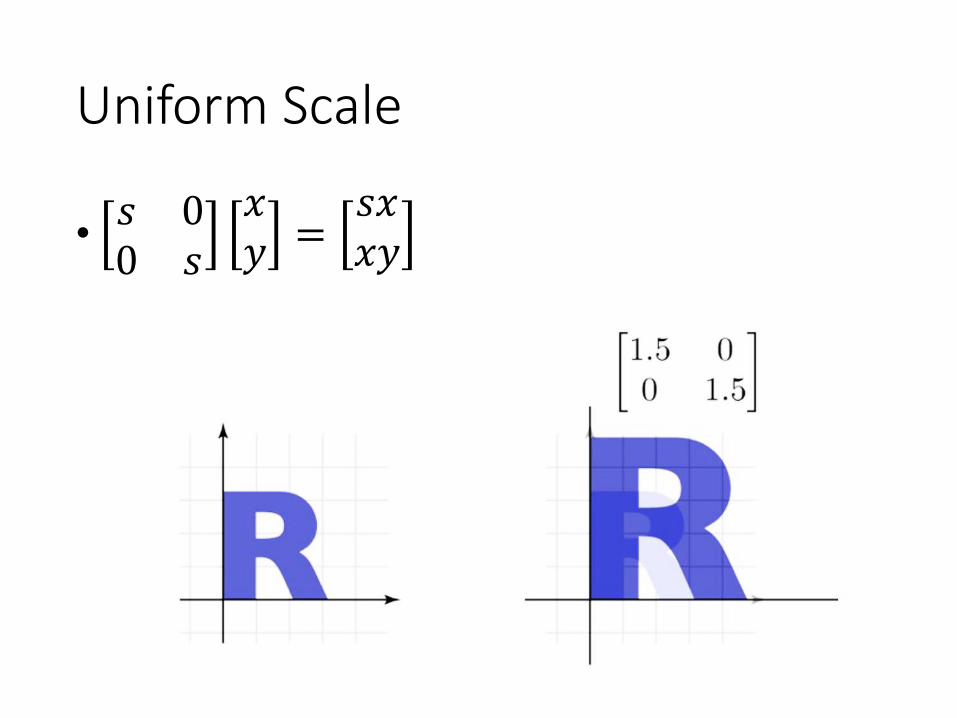
Uniform Scale
•𝑠 00 𝑠
𝑥𝑦 =
𝑠𝑥𝑥𝑦
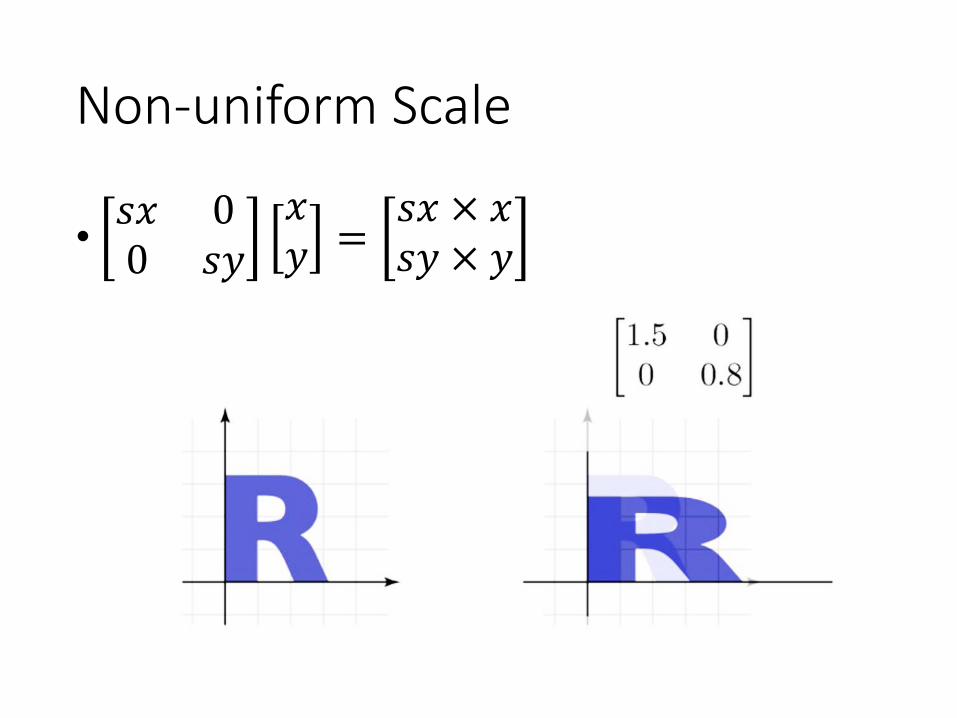
Non-uniform Scale
•𝑠𝑥 00 𝑠𝑦
𝑥𝑦 =
𝑠𝑥 × 𝑥𝑠𝑦 × 𝑦
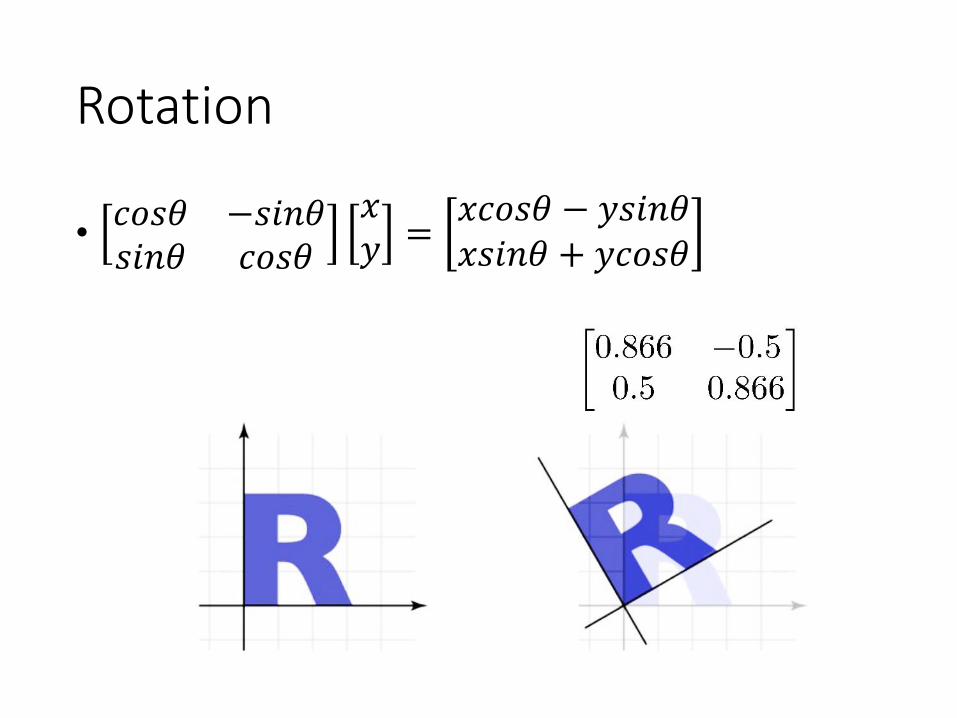
Rotation
•𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃
𝑥𝑦 =
𝑥𝑐𝑜𝑠𝜃 − 𝑦𝑠𝑖𝑛𝜃𝑥𝑠𝑖𝑛𝜃 + 𝑦𝑐𝑜𝑠𝜃
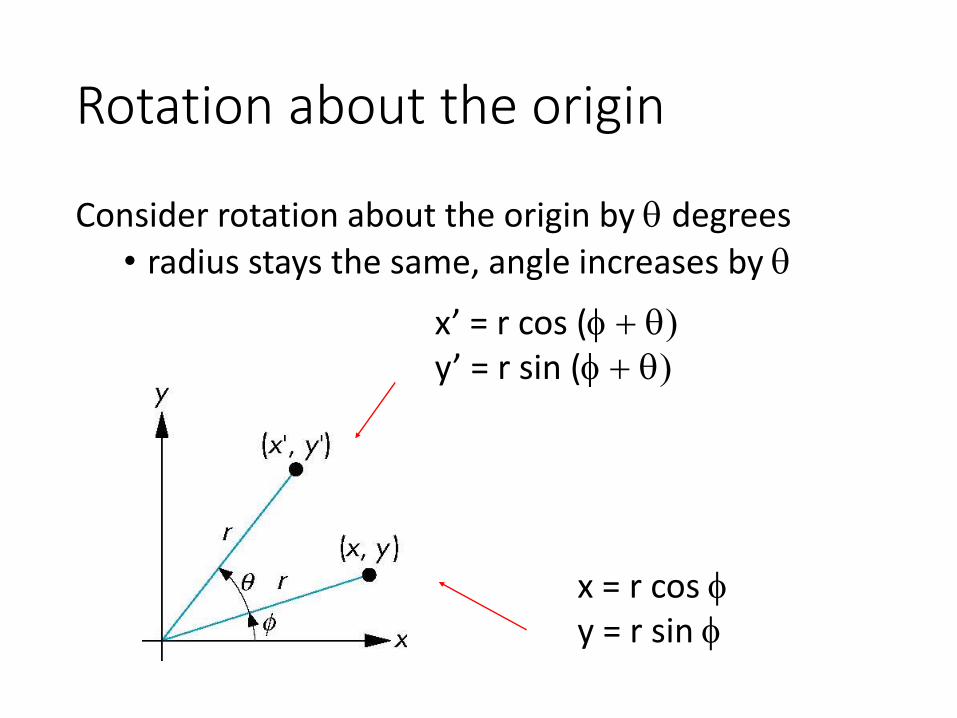
Rotation about the origin
Consider rotation about the origin by q degrees
• radius stays the same, angle increases by q
x = r cos fy = r sin f
x’ = r cos (f + q)
y’ = r sin (f + q)
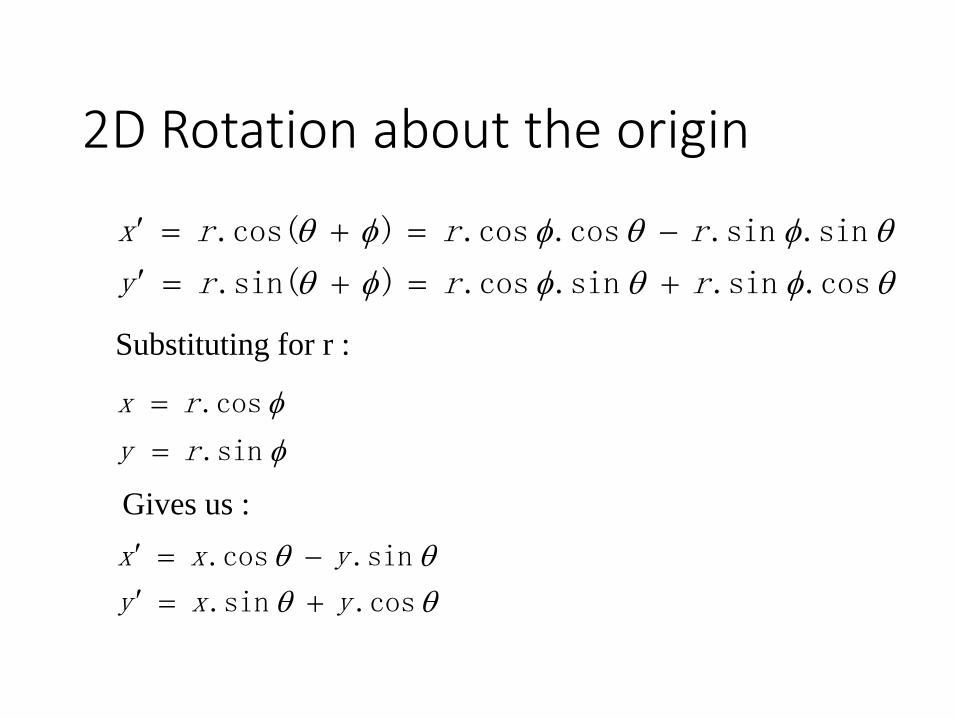
2D Rotation about the origin
f
f
sin.
cos.
ry
rx
=
=
qfqffq
qfqffq
cos.sin.sin.cos.)sin(.
sin.sin.cos.cos.)cos(.
rrry
rrrx
+=+=
−=+=
Substituting for r :
Gives us :
cos.sin.
sin.cos.
yxy
yxx
+=
−=
Rewriting in Matrix form
cos.sin.
sin.cos.
yxy
yxx
+=
−=
Rewriting in matrix form gives us :
−=
y
x
y
x.
cossin
sincos
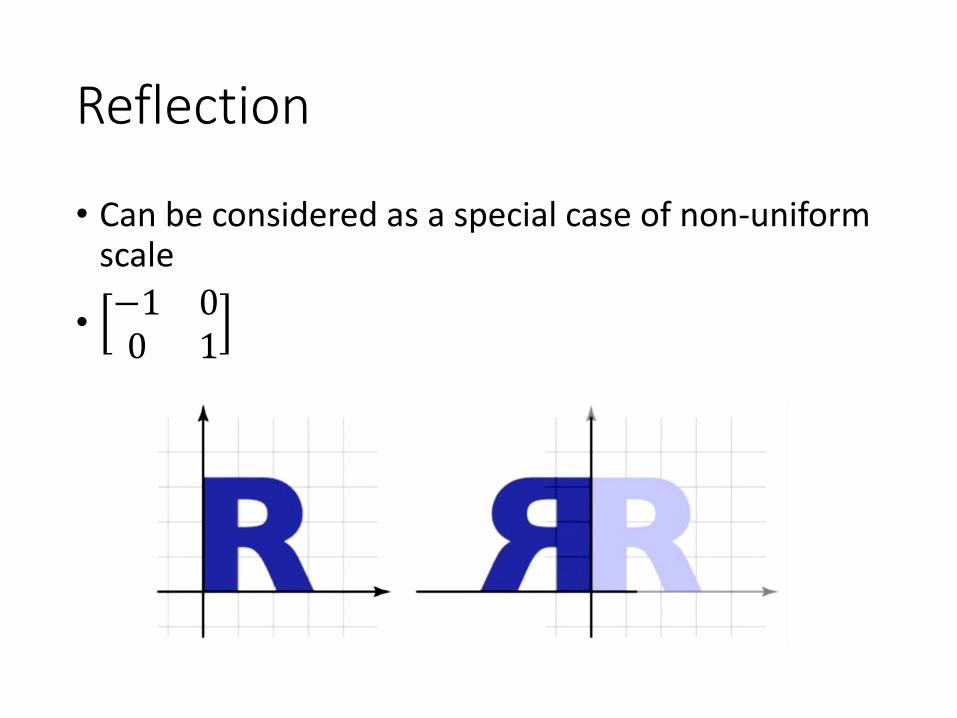
Reflection
• Can be considered as a special case of non-uniform scale
•−1 00 1
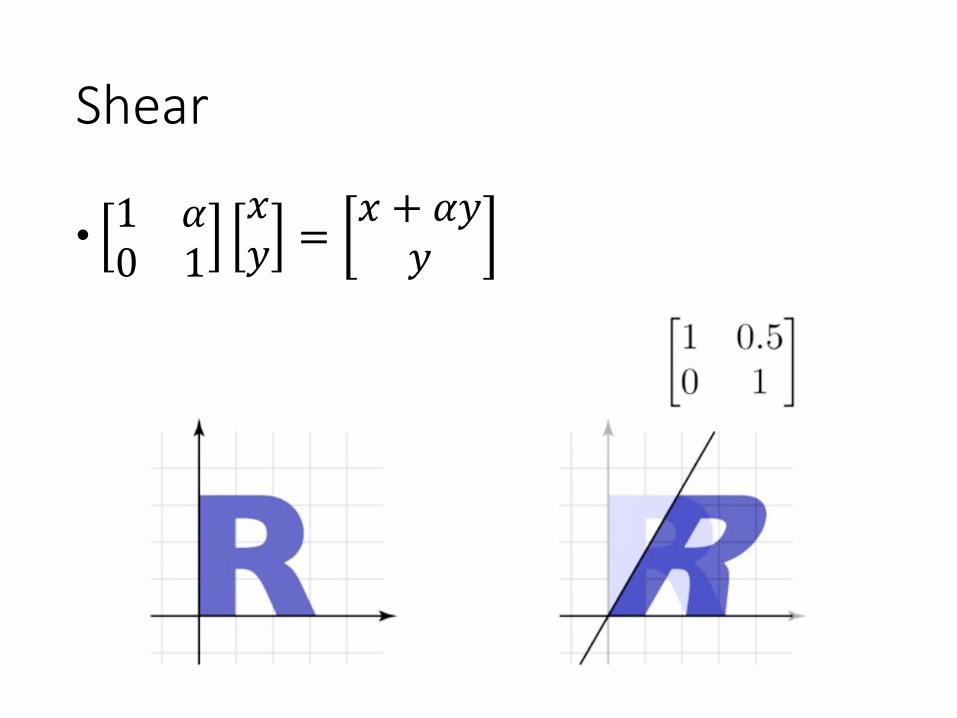
Shear
•1 𝛼0 1
𝑥𝑦 =
𝑥 + 𝛼𝑦𝑦
• Questions?
How to animate a bicycle?
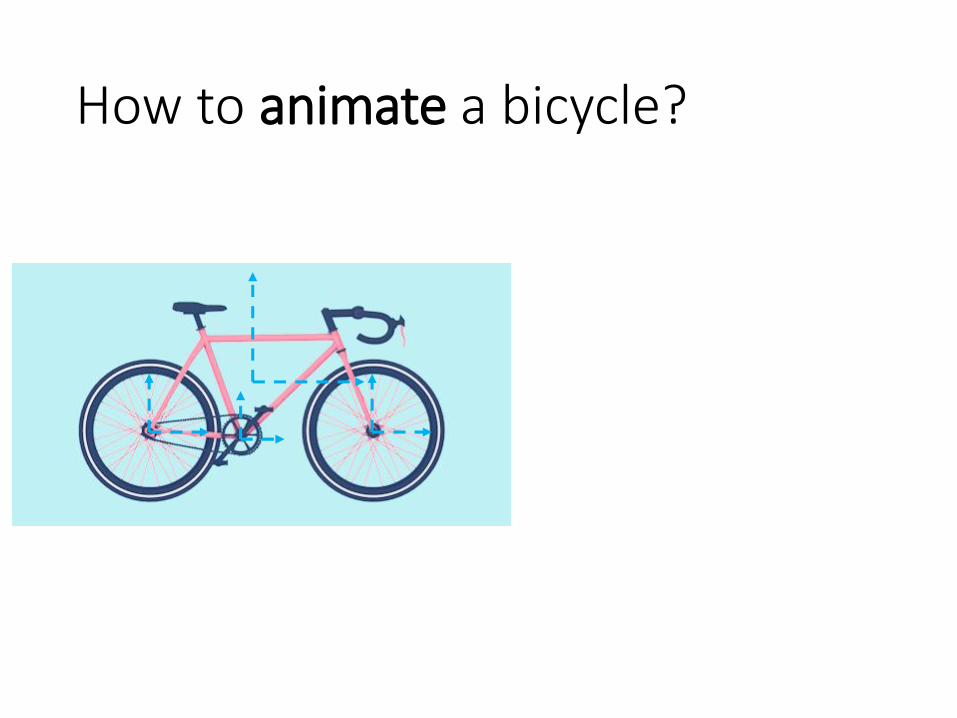
How to animate a bicycle?
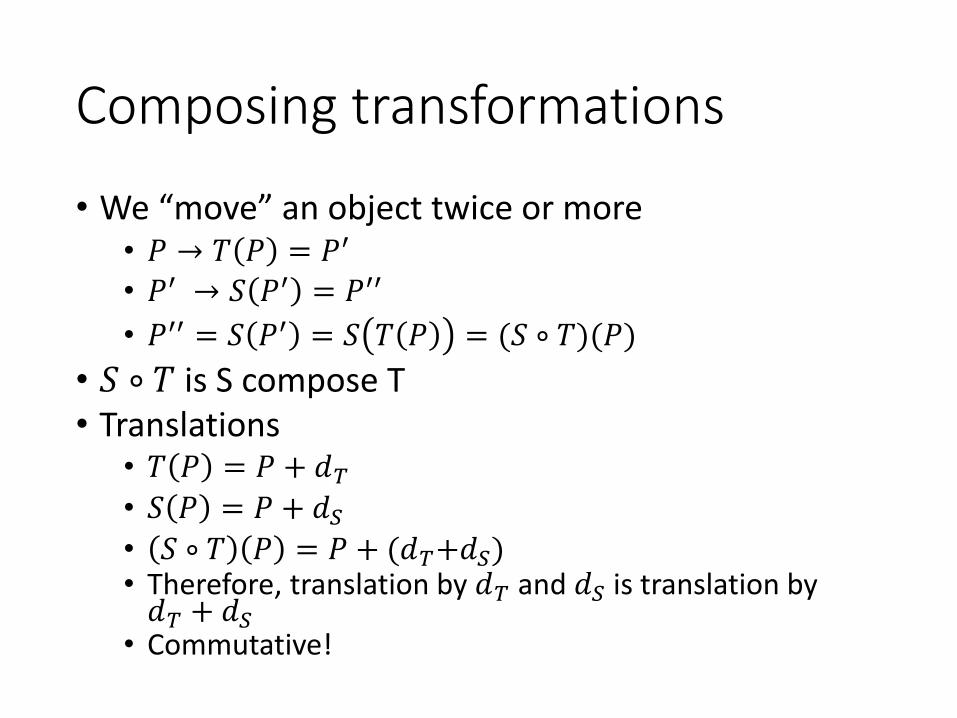
Composing transformations
• We “move” an object twice or more• 𝑃 → 𝑇 𝑃 = 𝑃′
• 𝑃′ → 𝑆 𝑃′ = 𝑃′′
• 𝑃′′ = 𝑆 𝑃′ = 𝑆 𝑇 𝑃 = (𝑆 ∘ 𝑇)(𝑃)
• 𝑆 ∘ 𝑇 is S compose T• Translations
• 𝑇 𝑃 = 𝑃 + 𝑑𝑇• 𝑆 𝑃 = 𝑃 + 𝑑𝑆• 𝑆 ∘ 𝑇 𝑃 = 𝑃 + (𝑑𝑇+𝑑𝑆)• Therefore, translation by 𝑑𝑇 and 𝑑𝑆 is translation by 𝑑𝑇 + 𝑑𝑆
• Commutative!
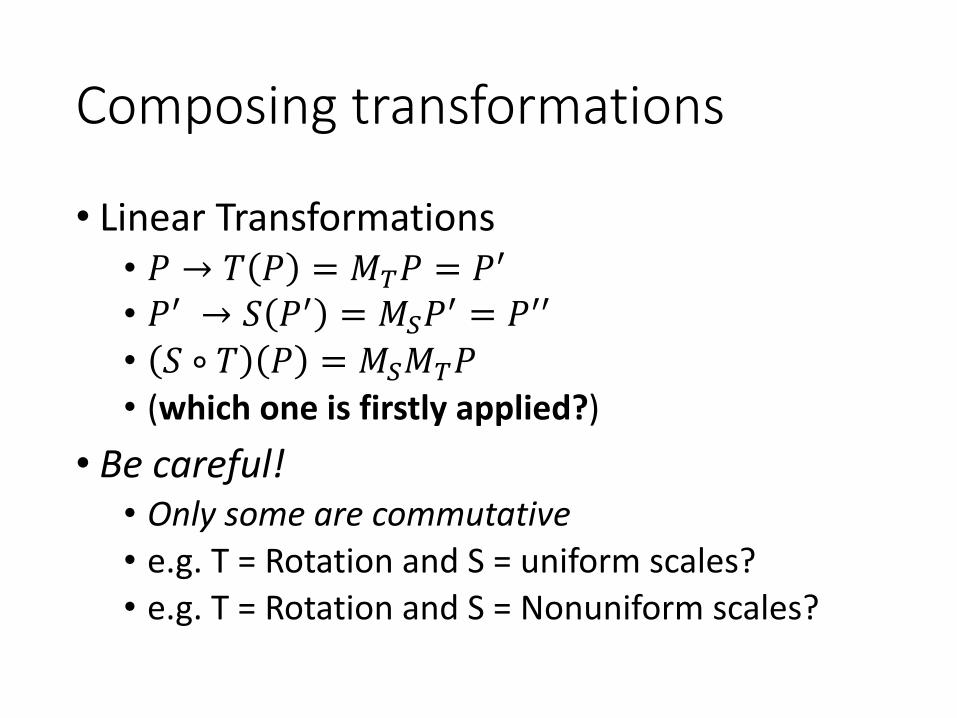
Composing transformations
• Linear Transformations• 𝑃 → 𝑇 𝑃 = 𝑀𝑇𝑃 = 𝑃′
• 𝑃′ → 𝑆 𝑃′ = 𝑀𝑆𝑃′ = 𝑃′′
• 𝑆 ∘ 𝑇 𝑃 = 𝑀𝑆𝑀𝑇𝑃
• (which one is firstly applied?)
• Be careful!• Only some are commutative
• e.g. T = Rotation and S = uniform scales?
• e.g. T = Rotation and S = Nonuniform scales?
Composing transformations
• Translation together with linear transformations - Affine transformation
• Applications require a single framework
• 𝑇 𝑃 = 𝑀𝑇𝑃 + 𝑑𝑇• 𝑆 𝑃 = 𝑀𝑆𝑃 + 𝑑𝑆• 𝑆 ∘ 𝑇 𝑃 = 𝑀𝑆 𝑀𝑇𝑃 + 𝑑𝑇 + 𝑑𝑆 = 𝑀𝑆𝑀𝑇𝑃+𝑀𝑆𝑑𝑇 + 𝑑𝑆
• Not elegant!
Homogeneous coordinates
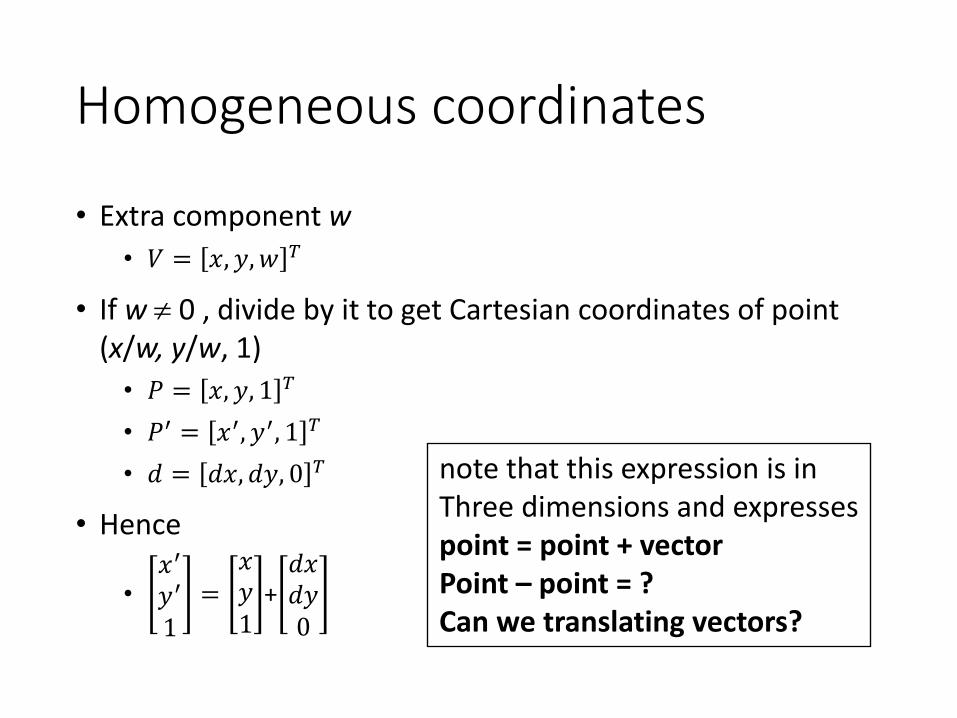
• Extra component w
• 𝑉 = 𝑥, 𝑦, 𝑤 𝑇
• If w 0 , divide by it to get Cartesian coordinates of point (x/w, y/w, 1)
• 𝑃 = 𝑥, 𝑦, 1 𝑇
• 𝑃′ = 𝑥′, 𝑦′, 1 𝑇
• 𝑑 = 𝑑𝑥, 𝑑𝑦, 0 𝑇
• Hence
•𝑥′
𝑦′
1
=𝑥𝑦1
+𝑑𝑥𝑑𝑦0
note that this expression is in Three dimensions and expressespoint = point + vectorPoint – point = ?Can we translating vectors?
Translation Matrix
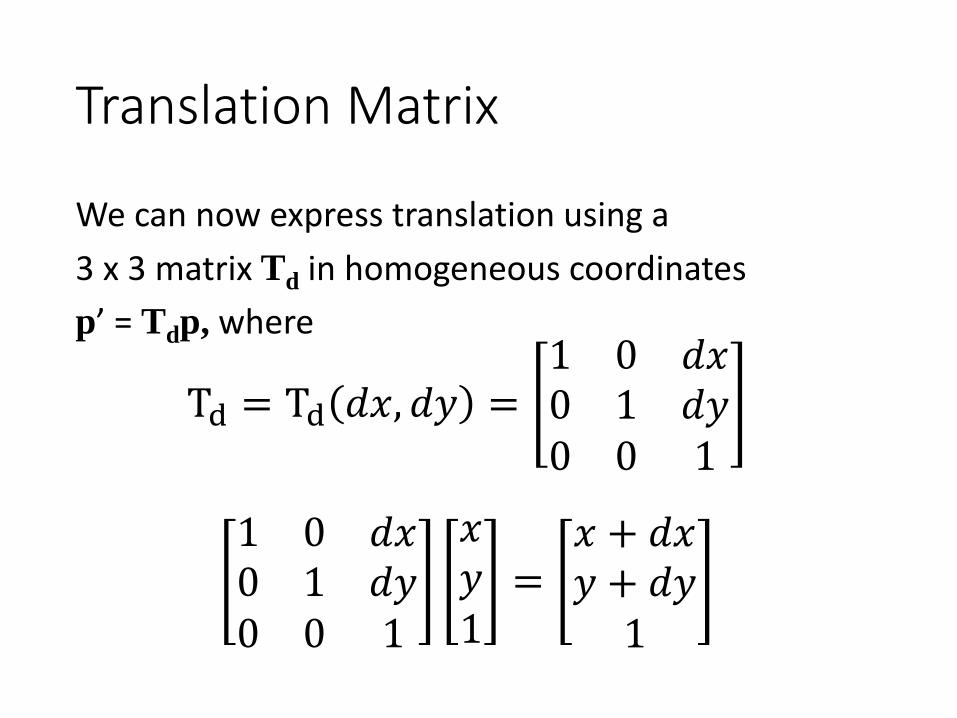
We can now express translation using a
3 x 3 matrix Td in homogeneous coordinates
p’ = Tdp, where
Td = Td 𝑑𝑥, 𝑑𝑦 =1 0 𝑑𝑥0 1 𝑑𝑦0 0 1
1 0 𝑑𝑥0 1 𝑑𝑦0 0 1
𝑥𝑦1
=𝑥 + 𝑑𝑥𝑦 + 𝑑𝑦
1
Properties of translations
• 𝑇 0,0 = 𝐼
• 𝑇 𝑠𝑥, 𝑠𝑦 ⋅ 𝑇 𝑡𝑥, 𝑡𝑦 = 𝑇 𝑠𝑥 + 𝑡𝑥, 𝑠𝑦 + 𝑡𝑦
• 𝑇 𝑠𝑥, 𝑠𝑦 ⋅ 𝑇 𝑡𝑥, 𝑡𝑦 = 𝑇 𝑡𝑥, 𝑡𝑦 ⋅ 𝑇 𝑠𝑥, 𝑠𝑦
• 𝑇−1 𝑠𝑥, 𝑠𝑦 = 𝑇 −𝑠𝑥, −𝑠𝑦
• Note : translation matrices are commutative.
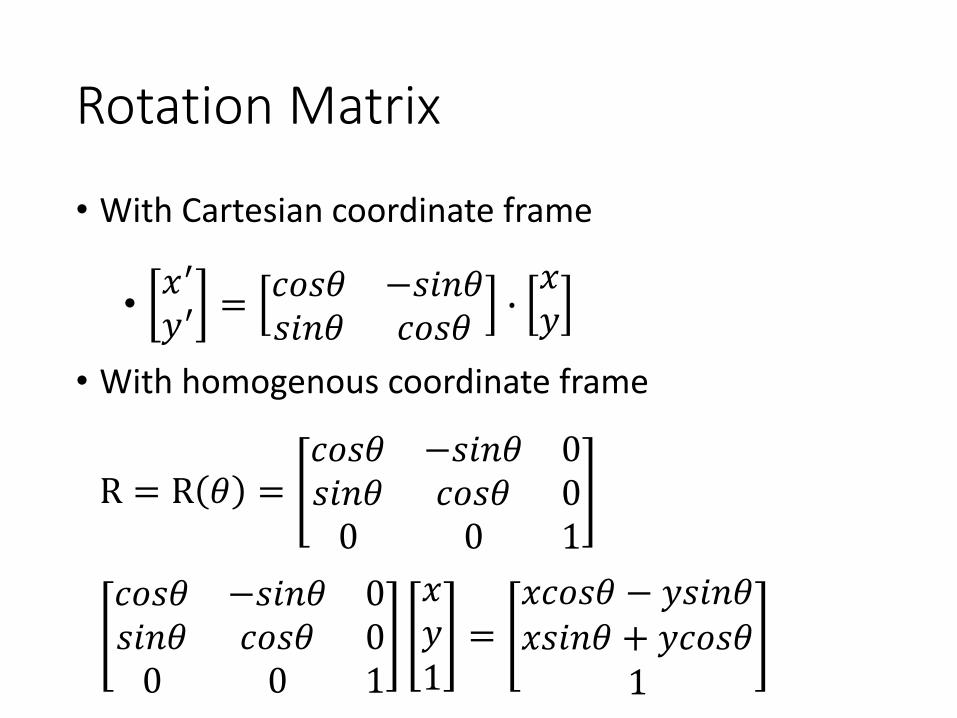
Rotation Matrix
• With Cartesian coordinate frame
•𝑥′
𝑦′=
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃
∙𝑥𝑦
• With homogenous coordinate frame
R = R 𝜃 =𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 0𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 00 0 1
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃 0𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 00 0 1
𝑥𝑦1
=𝑥𝑐𝑜𝑠𝜃 − 𝑦𝑠𝑖𝑛𝜃𝑥𝑠𝑖𝑛𝜃 + 𝑦𝑐𝑜𝑠𝜃
1
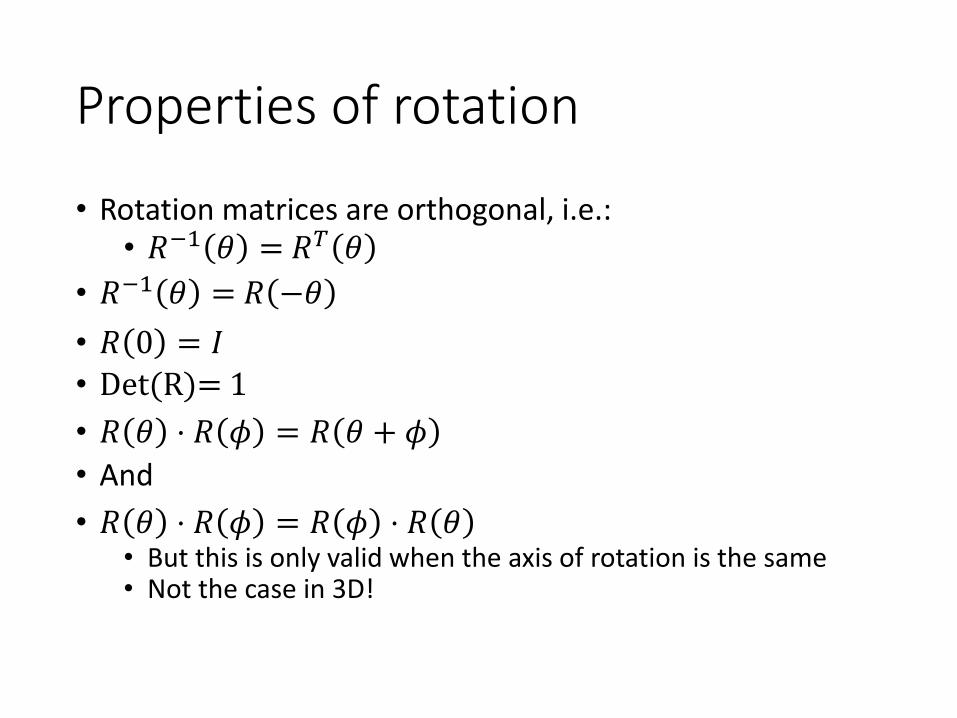
Properties of rotation
• Rotation matrices are orthogonal, i.e.:• 𝑅−1 𝜃 = 𝑅𝑇 𝜃
• 𝑅−1 𝜃 = 𝑅 −𝜃
• 𝑅 0 = 𝐼
• Det(R)= 1
• 𝑅 𝜃 ⋅ 𝑅 𝜙 = 𝑅 𝜃 + 𝜙
• And
• 𝑅 𝜃 ⋅ 𝑅 𝜙 = 𝑅 𝜙 ⋅ 𝑅 𝜃• But this is only valid when the axis of rotation is the same• Not the case in 3D!
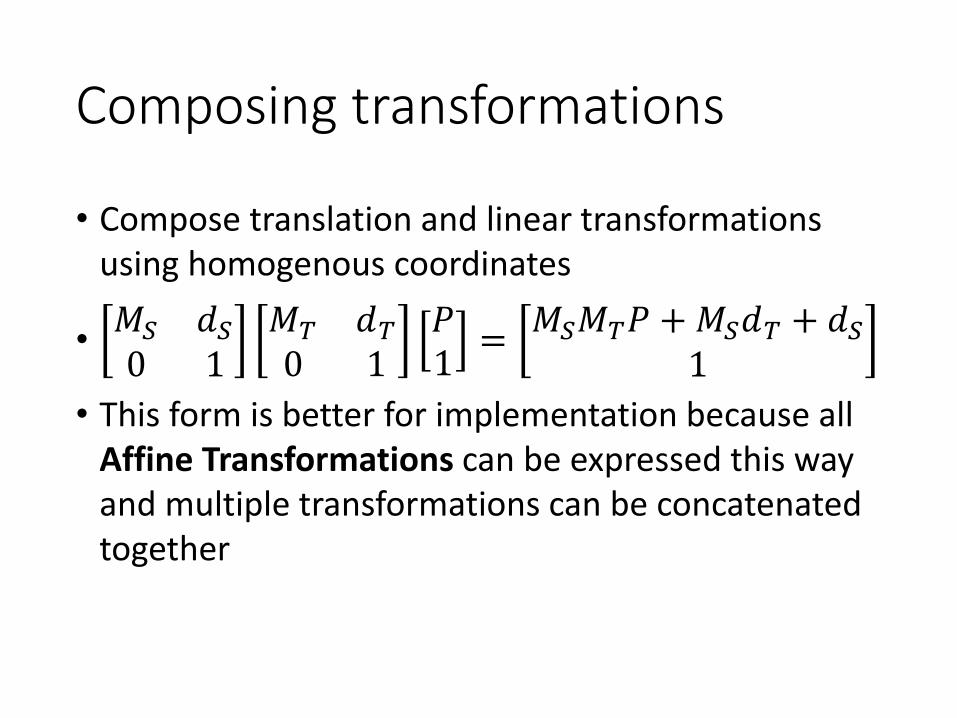
Composing transformations
• Compose translation and linear transformations using homogenous coordinates
•𝑀𝑆 𝑑𝑆0 1
𝑀𝑇 𝑑𝑇0 1
𝑃1
=𝑀𝑆𝑀𝑇𝑃 +𝑀𝑆𝑑𝑇 + 𝑑𝑆
1
• This form is better for implementation because all Affine Transformations can be expressed this way and multiple transformations can be concatenated together
• Questions?
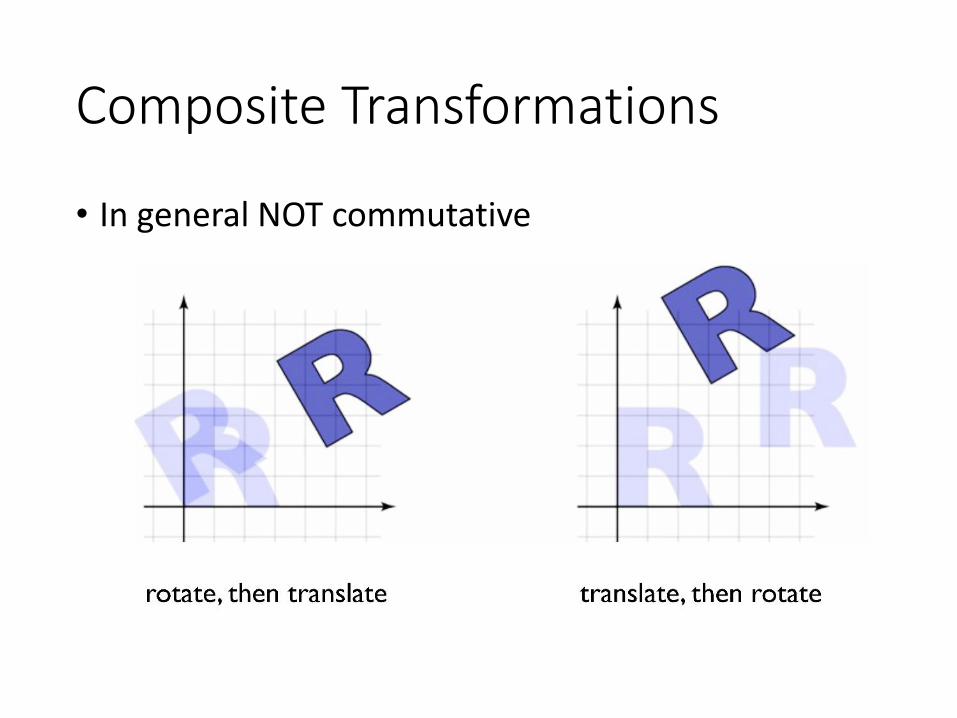
Composite Transformations
• In general NOT commutative
Non-commutative Composition
02/10/09 Lecture 429
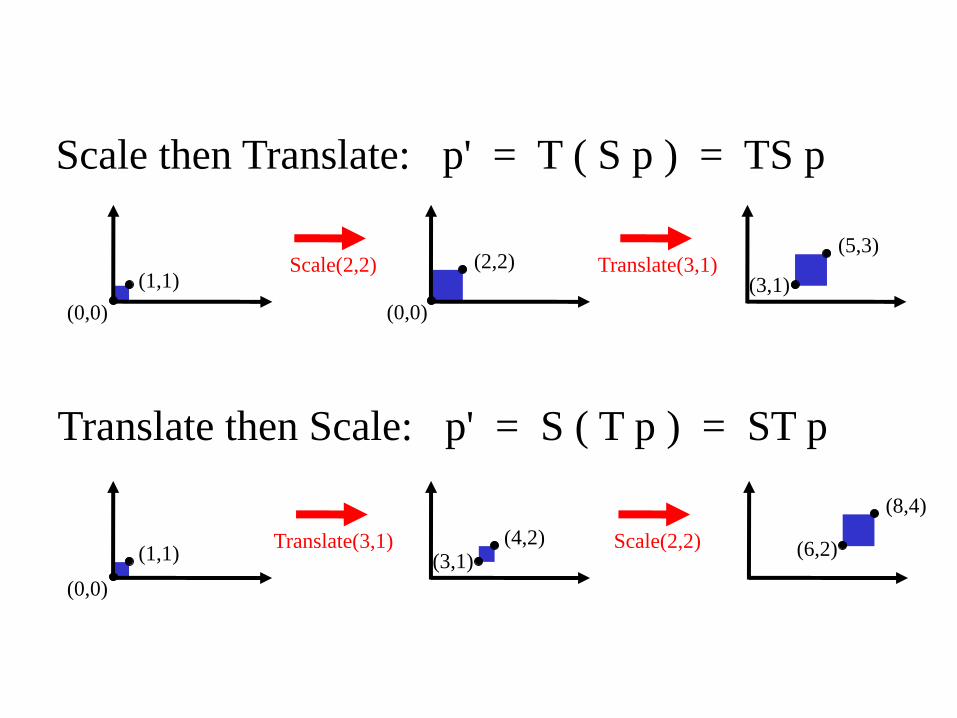
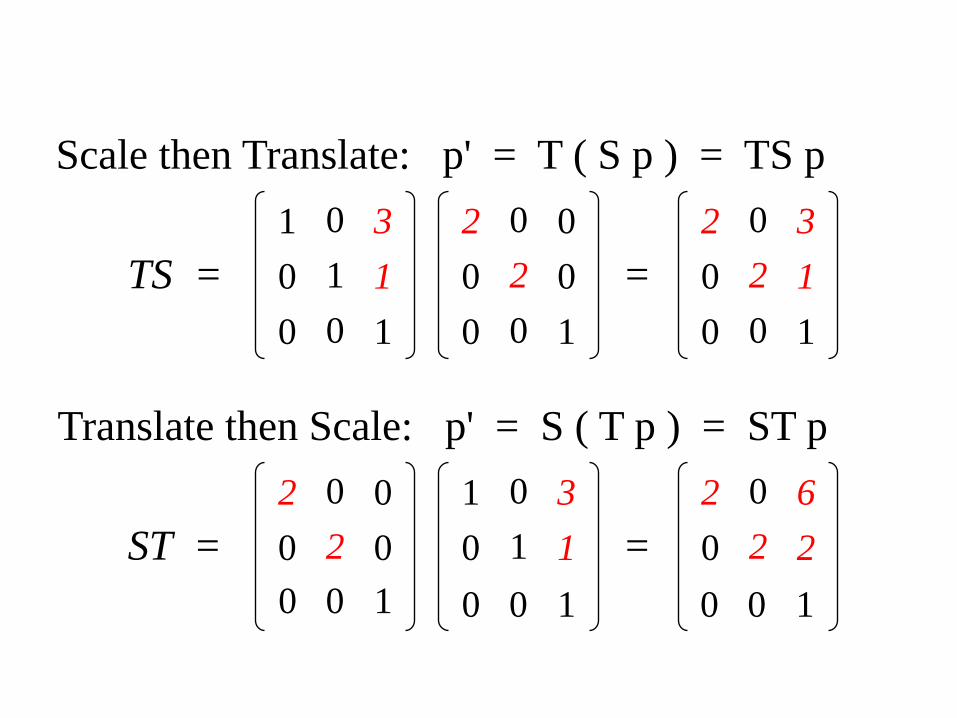
Scale then Translate: p' = T ( S p ) = TS p
Translate then Scale: p' = S ( T p ) = ST p
(0,0)
(1,1)(4,2)
(3,1)
(8,4)
(6,2)
(0,0)
(1,1)(2,2)
(0,0)
(5,3)
(3,1)Scale(2,2) Translate(3,1)
Translate(3,1) Scale(2,2)
Non-commutative Composition
02/10/09 Lecture 430
TS =
2
0
0
0
2
0
0
0
1
1
0
0
0
1
0
3
1
1
ST =
2
0
0
2
0
0
1
0
0
1
3
1
Scale then Translate: p' = T ( S p ) = TS p
2
0
0
0
2
0
3
1
1
2
0
0
2
6
2
=
=
Translate then Scale: p' = S ( T p ) = ST p
0 0 1 0 0 1 0 0 1
Properties of Affine transformations
• Rotation and translation• Angles and distances are preserved
• Unit cube is always unit cube
• Rigid-Body transformations or rigid motion
• Rotation, translation and scale.• Angles & distances not preserved.
• But parallel lines are.
• Questions?
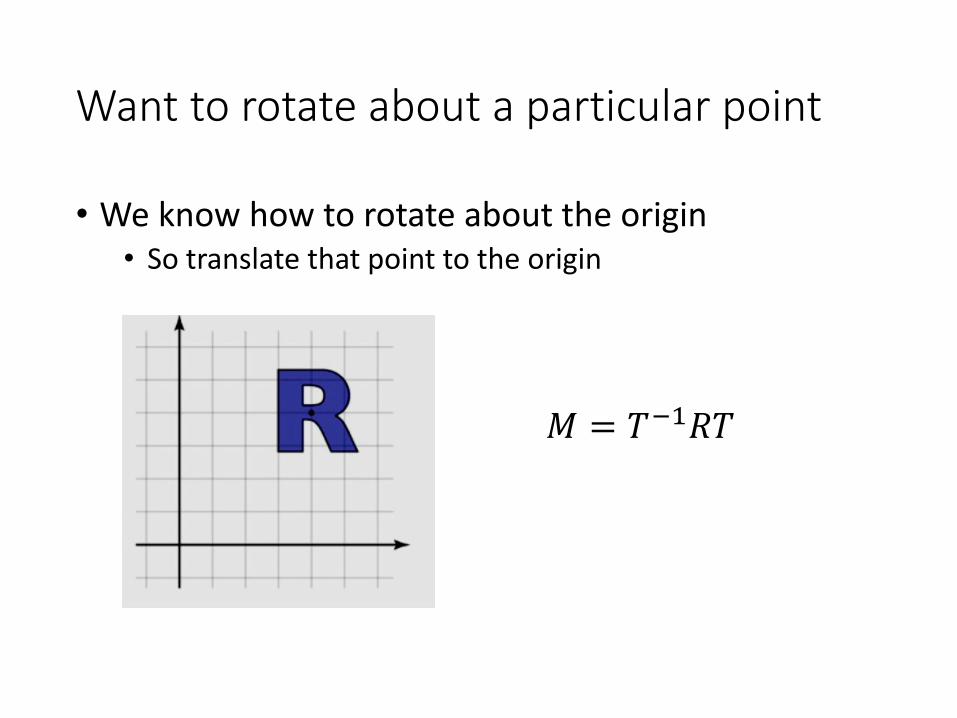
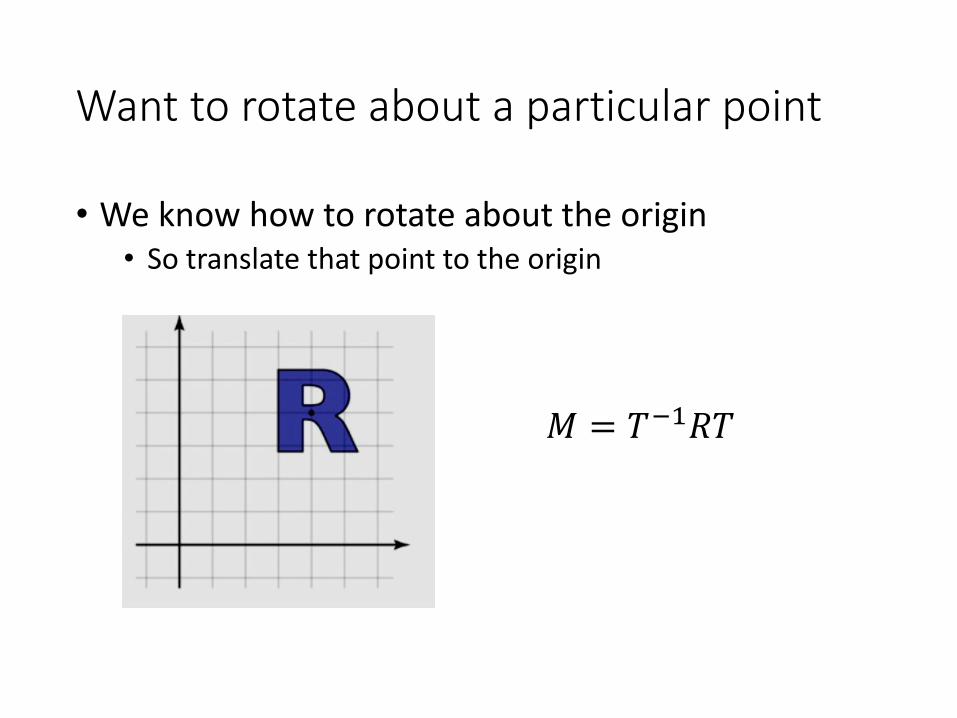
Want to rotate about a particular point
• We know how to rotate about the origin• So translate that point to the origin
𝑀 = 𝑇−1𝑅𝑇
Transformations of local coordinate systems
• Have been discussing transformations as transforming points
• Always need to think the transformation in the world coordinate system
• Sometimes this might not be convenient• i.e. rotating objects at its location
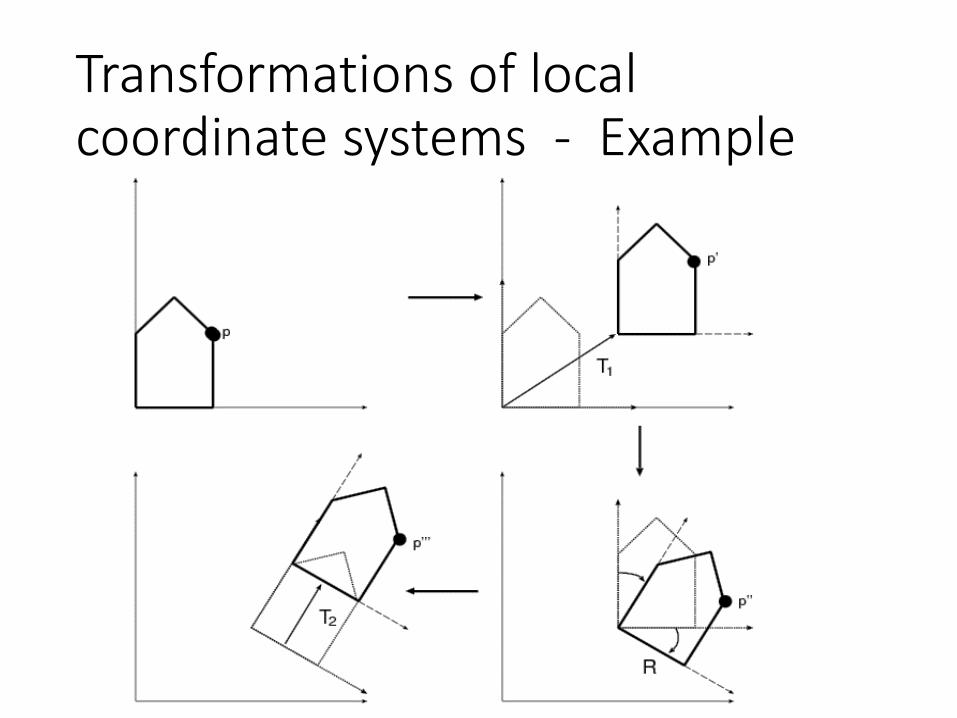
Transformations of local coordinate systems - Example
Transformations of local coordinate systems - Example
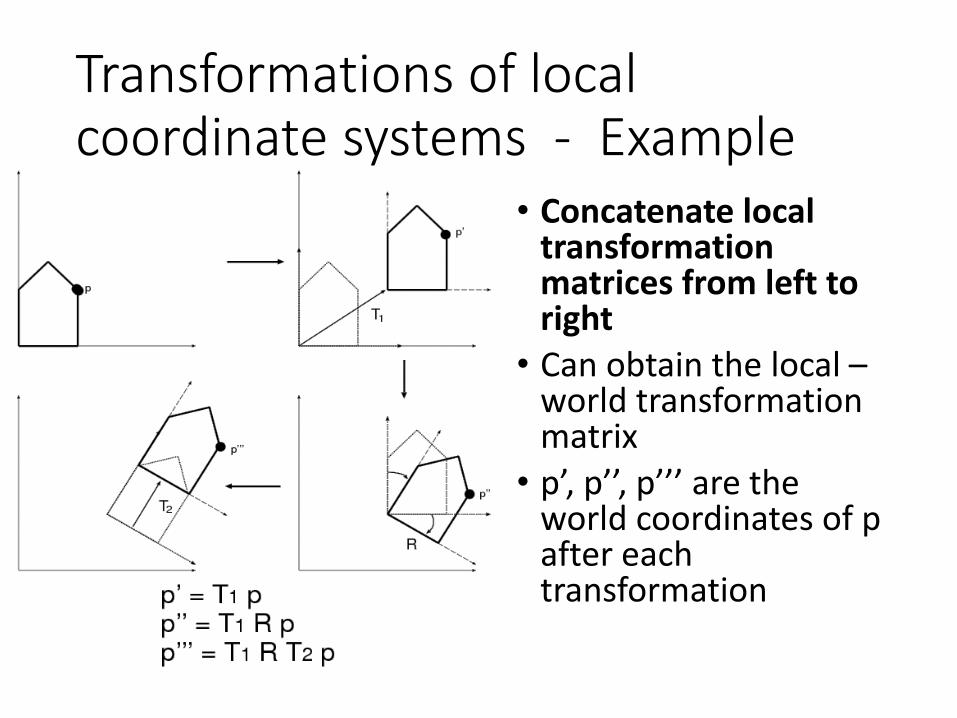
• Concatenate local transformation matrices from left to right
• Can obtain the local –world transformationmatrix
• p’, p’’, p’’’ are the world coordinates of p after each transformation
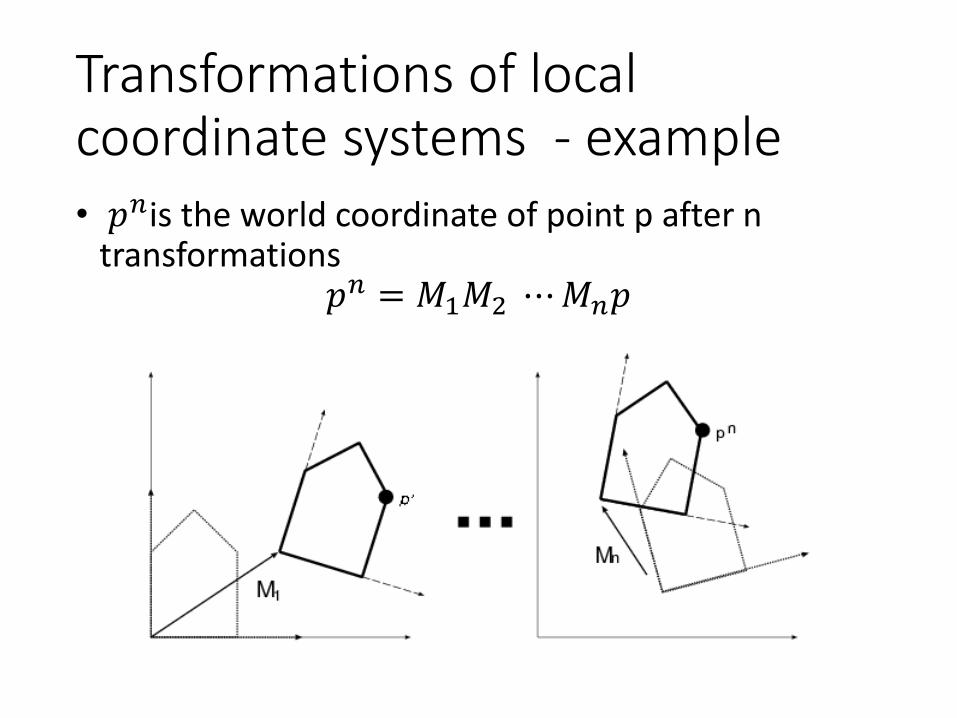
Transformations of local coordinate systems - example• 𝑝𝑛is the world coordinate of point p after n
transformations𝑝𝑛 = 𝑀1𝑀2 ⋯𝑀𝑛𝑝
Want to rotate about a particular point
• We know how to rotate about the origin• So translate that point to the origin
𝑀 = 𝑇−1𝑅𝑇
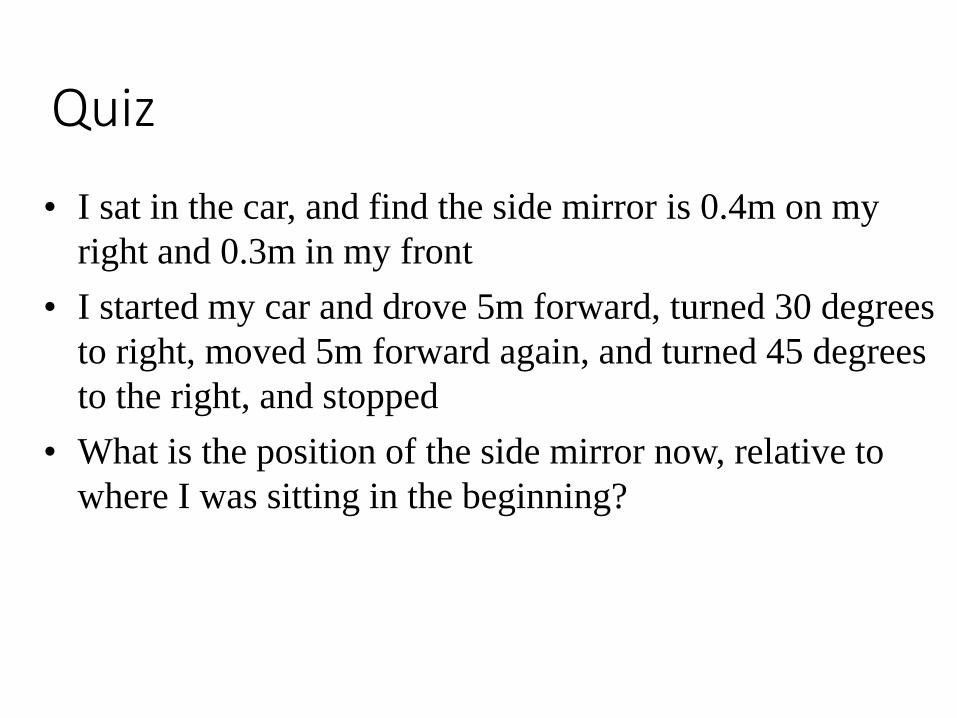
Quiz
• I sat in the car, and find the side mirror is 0.4m on my
right and 0.3m in my front
• I started my car and drove 5m forward, turned 30 degrees
to right, moved 5m forward again, and turned 45 degrees
to the right, and stopped
• What is the position of the side mirror now, relative to
where I was sitting in the beginning?
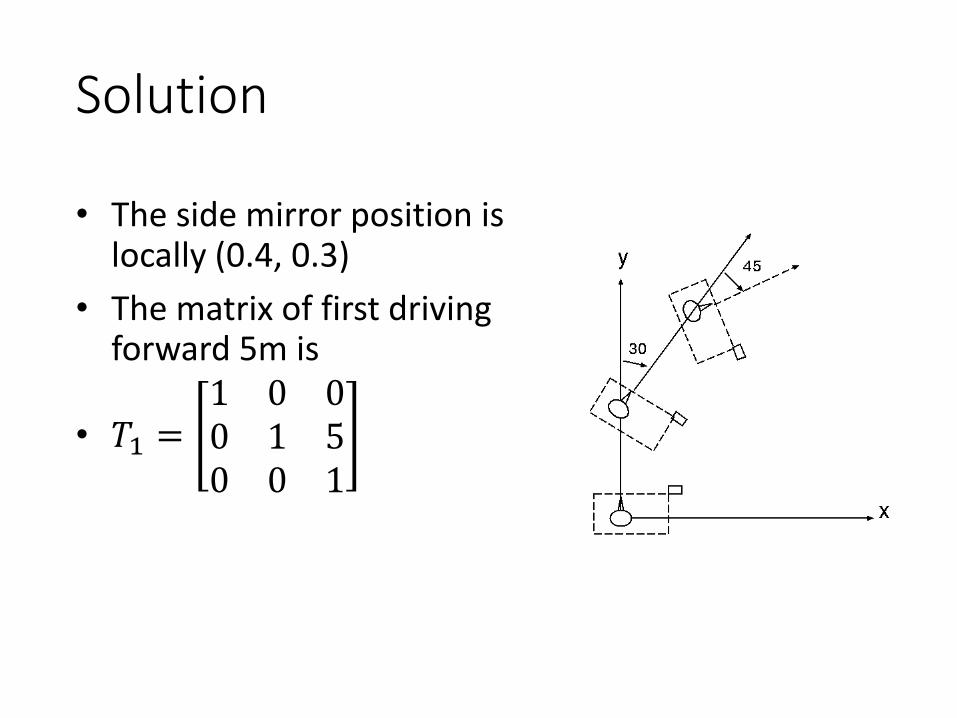
Solution
• The side mirror position is locally (0.4, 0.3)
• The matrix of first driving forward 5m is
• 𝑇1 =1 0 00 1 50 0 1
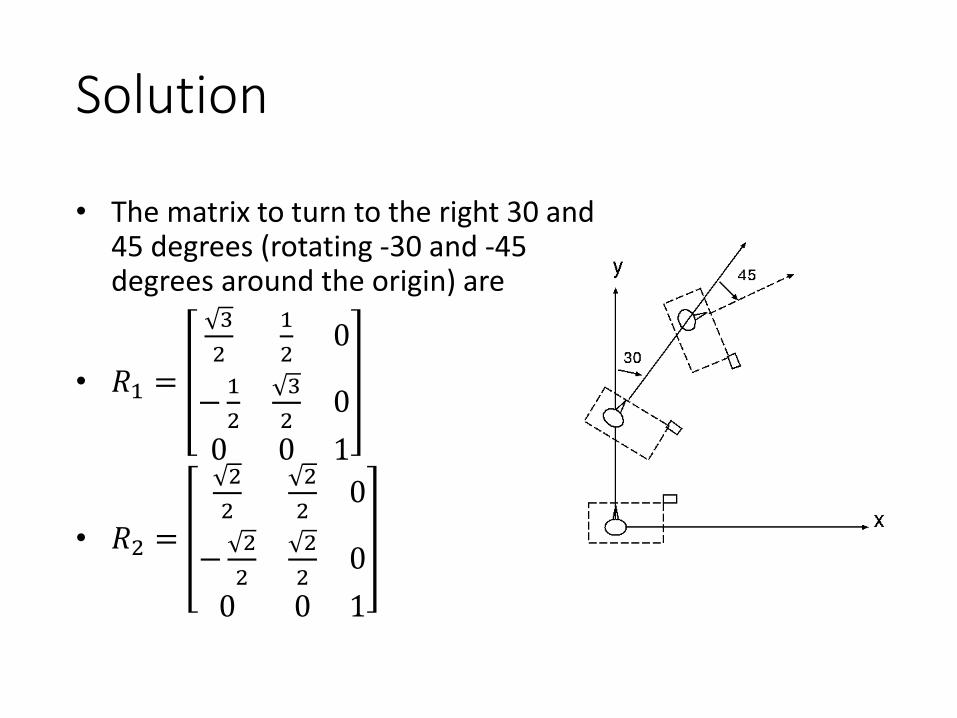
Solution
• The matrix to turn to the right 30 and 45 degrees (rotating -30 and -45 degrees around the origin) are
• 𝑅1 =
3
2
1
20
−1
2
3
20
0 0 1
• 𝑅2 =
2
2
2
20
−2
2
2
20
0 0 1
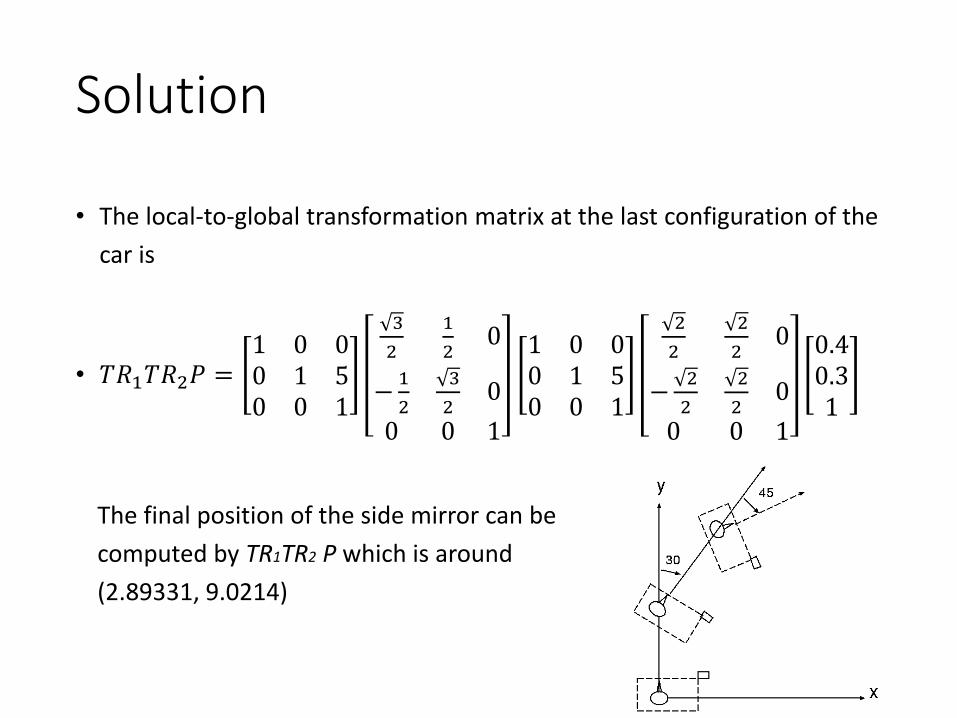
Solution
• The local-to-global transformation matrix at the last configuration of the
car is
• 𝑇𝑅1𝑇𝑅2𝑃 =1 0 00 1 50 0 1
3
2
1
20
−1
2
3
20
0 0 1
1 0 00 1 50 0 1
2
2
2
20
−2
2
2
20
0 0 1
0.40.31
The final position of the side mirror can be
computed by TR1TR2 P which is around
(2.89331, 9.0214)
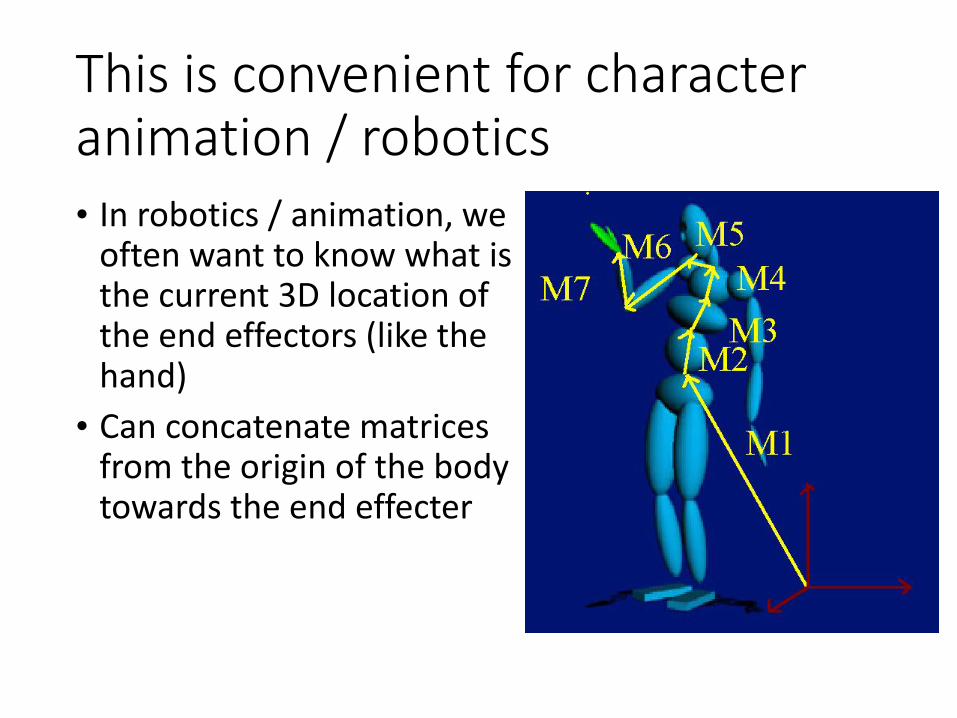
This is convenient for character animation / robotics • In robotics / animation, we
often want to know what is the current 3D location of the end effectors (like the hand)
• Can concatenate matricesfrom the origin of the body towards the end effecter
How to implement?
• Queue?
• Stack?
• Tree?
• Questions?
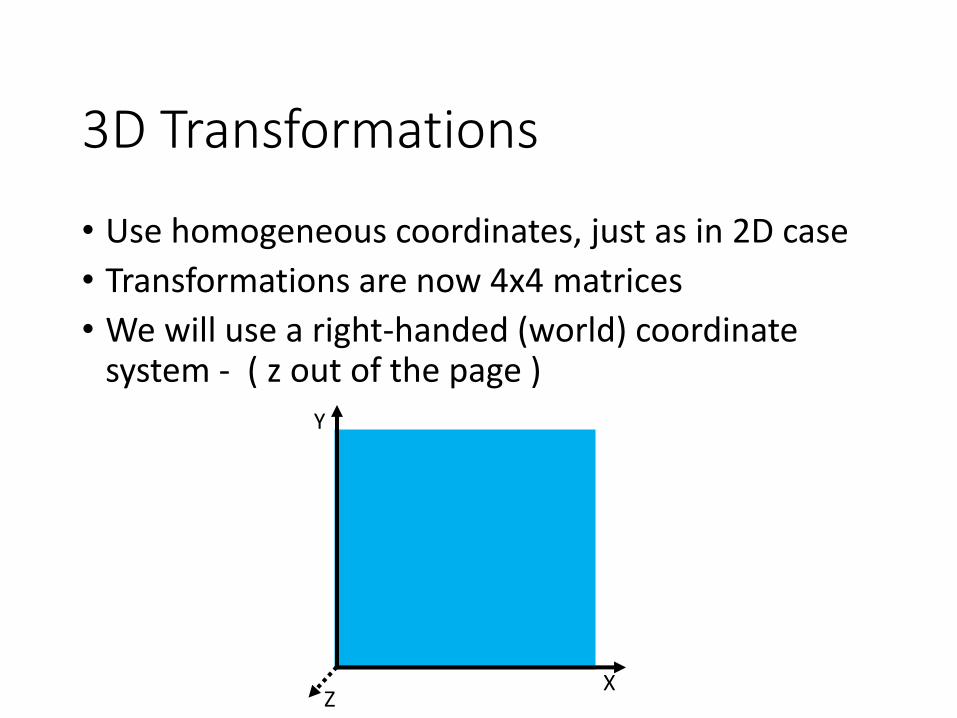
3D Transformations
• Use homogeneous coordinates, just as in 2D case
• Transformations are now 4x4 matrices
• We will use a right-handed (world) coordinate system - ( z out of the page )
X
Y
Z
Translation
•
𝑥′
𝑦′
𝑧′
1
=
1 00 1
0 𝑑𝑥0 𝑑𝑦
0 00 0
1 𝑑𝑧0 1
𝑥𝑦𝑧1
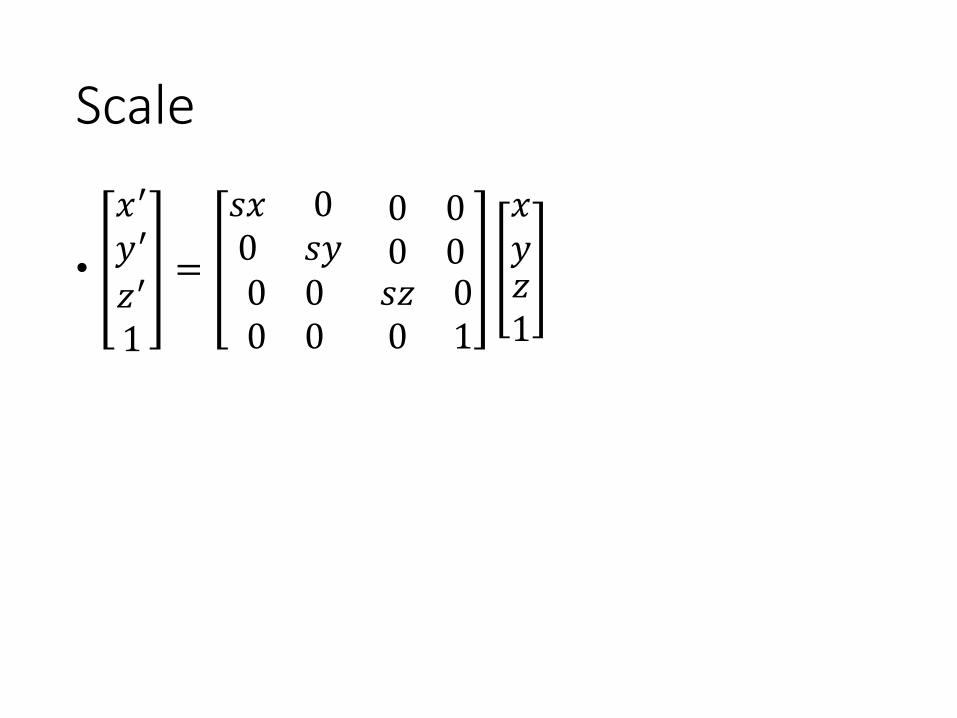
Scale
•
𝑥′
𝑦′
𝑧′
1
=
𝑠𝑥 00 𝑠𝑦
0 00 0
0 00 0
𝑠𝑧 00 1
𝑥𝑦𝑧1
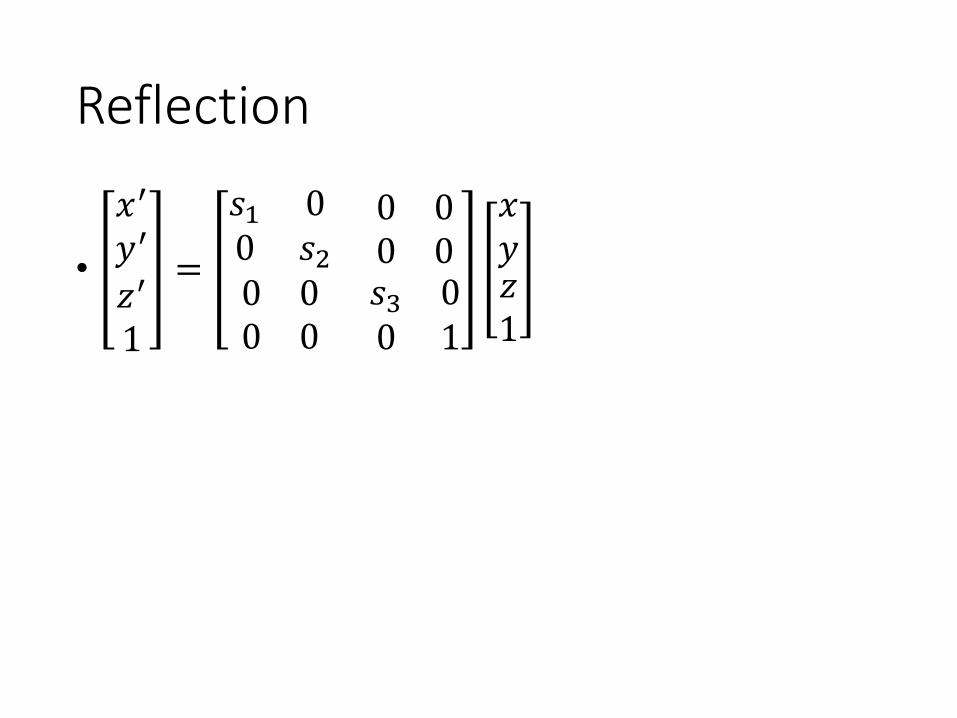
Reflection
•
𝑥′
𝑦′
𝑧′
1
=
𝑠1 00 𝑠2
0 00 0
0 00 0
𝑠3 00 1
𝑥𝑦𝑧1
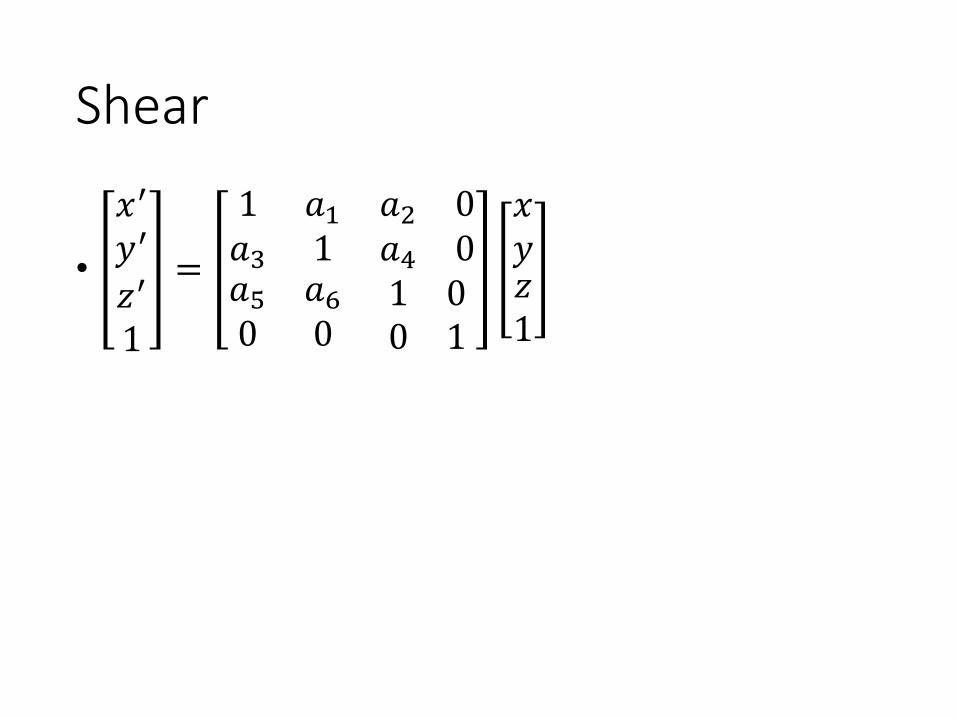
Shear
•
𝑥′
𝑦′
𝑧′
1
=
1 𝑎1𝑎3 1
𝑎2 0𝑎4 0
𝑎5 𝑎60 0
1 00 1
𝑥𝑦𝑧1
General Rotation Matrices
• Rotation in 2D?• Around an arbitrary point
• Rotation in 3D?• Around an arbitrary axis
• There are many more 3D rotations than 2D
Specifying Rotations
• In 2D, just an angle 𝜃
• In 3D, is more complex• Basic rotation about origin: Axis and angle
• Convention: positive rotation is CCW (right handed)
• Many ways• Directly through
• Euler angles: 3 angles about 3 axes
• Indirectly through frame transformations
• Quaternions
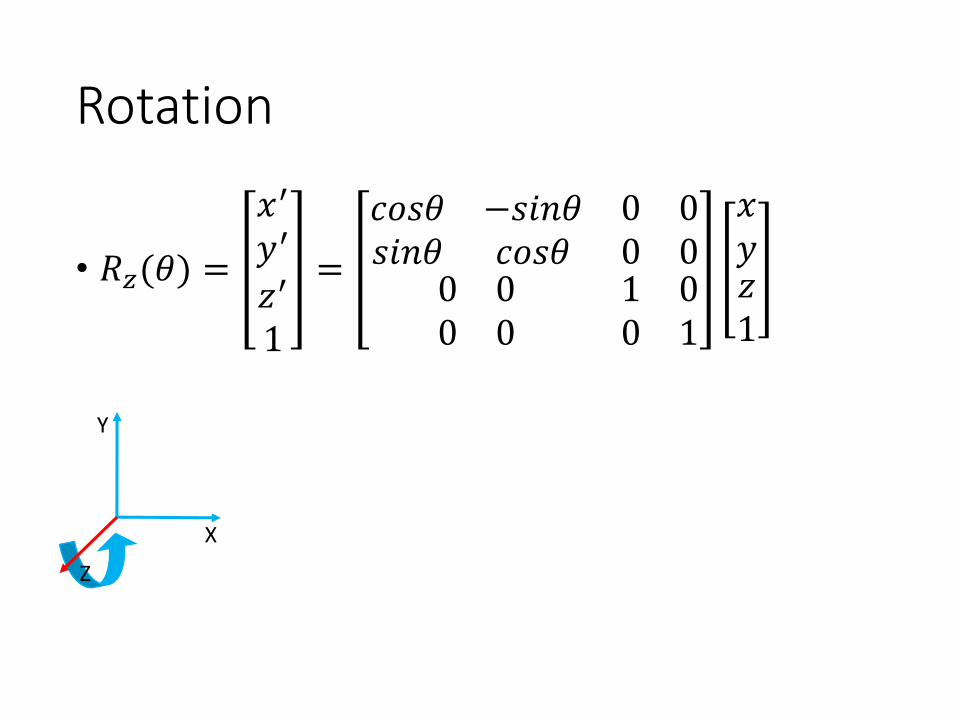
Rotation
• 𝑅𝑧(𝜃) =
𝑥′
𝑦′
𝑧′
1
=
𝑐𝑜𝑠𝜃 −𝑠𝑖𝑛𝜃𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃
0 00 0
0 00 0
1 00 1
𝑥𝑦𝑧1
X
Y
Z
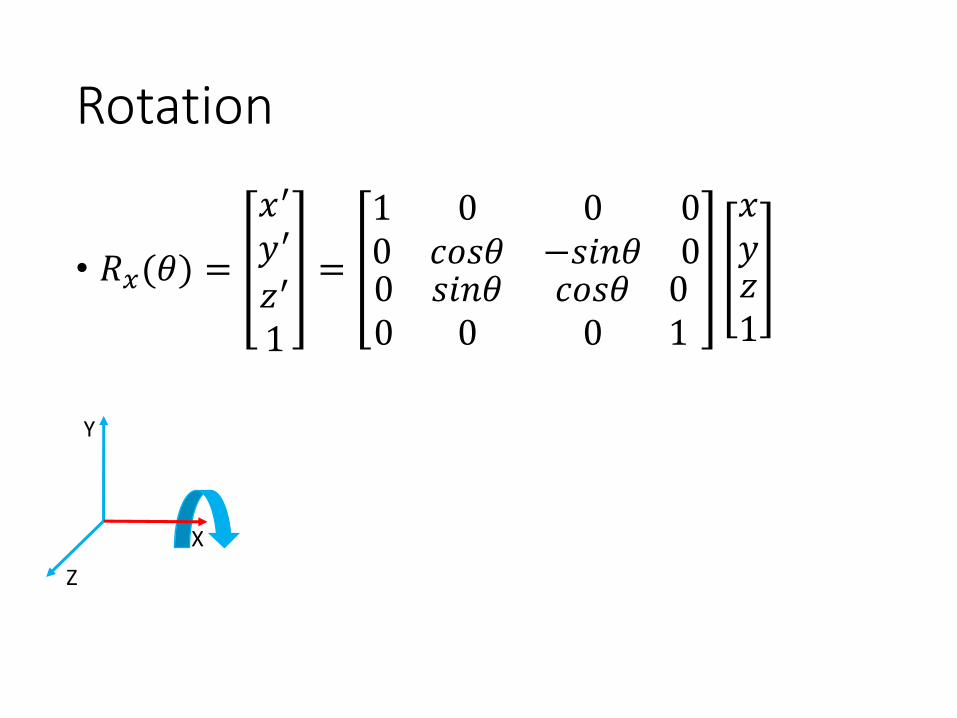
Rotation
• 𝑅𝑥(𝜃) =
𝑥′
𝑦′
𝑧′
1
=
1 00 𝑐𝑜𝑠𝜃
0 0−𝑠𝑖𝑛𝜃 0
0 𝑠𝑖𝑛𝜃0 0
𝑐𝑜𝑠𝜃 00 1
𝑥𝑦𝑧1
X
Y
Z
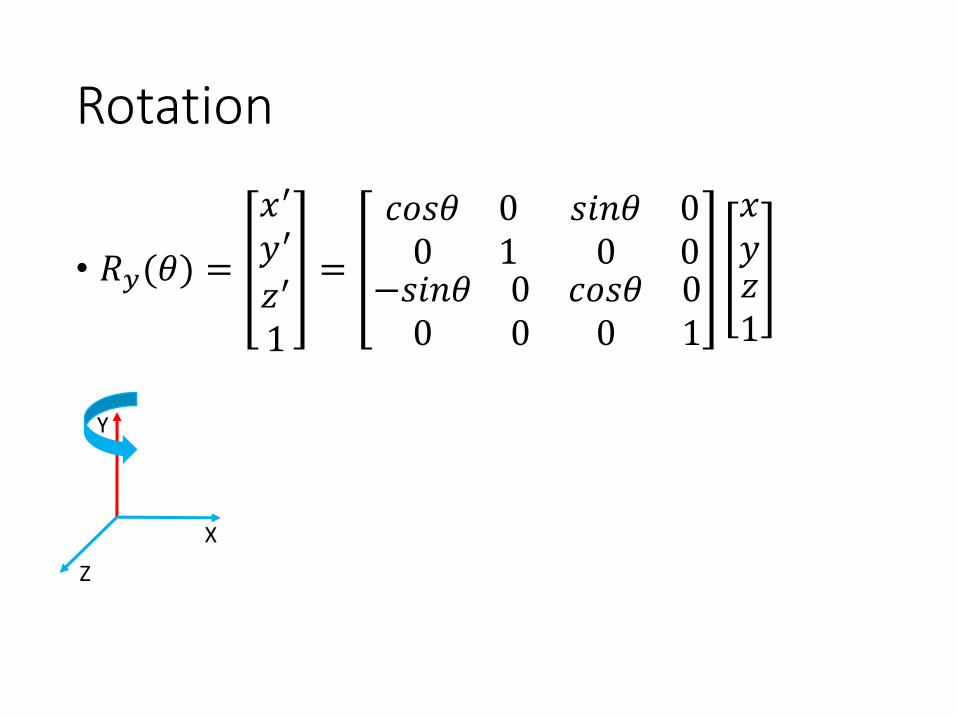
Rotation
• 𝑅𝑦(𝜃) =
𝑥′
𝑦′
𝑧′
1
=
𝑐𝑜𝑠𝜃 00 1
𝑠𝑖𝑛𝜃 00 0
−𝑠𝑖𝑛𝜃 00 0
𝑐𝑜𝑠𝜃 00 1
𝑥𝑦𝑧1
X
Y
Z
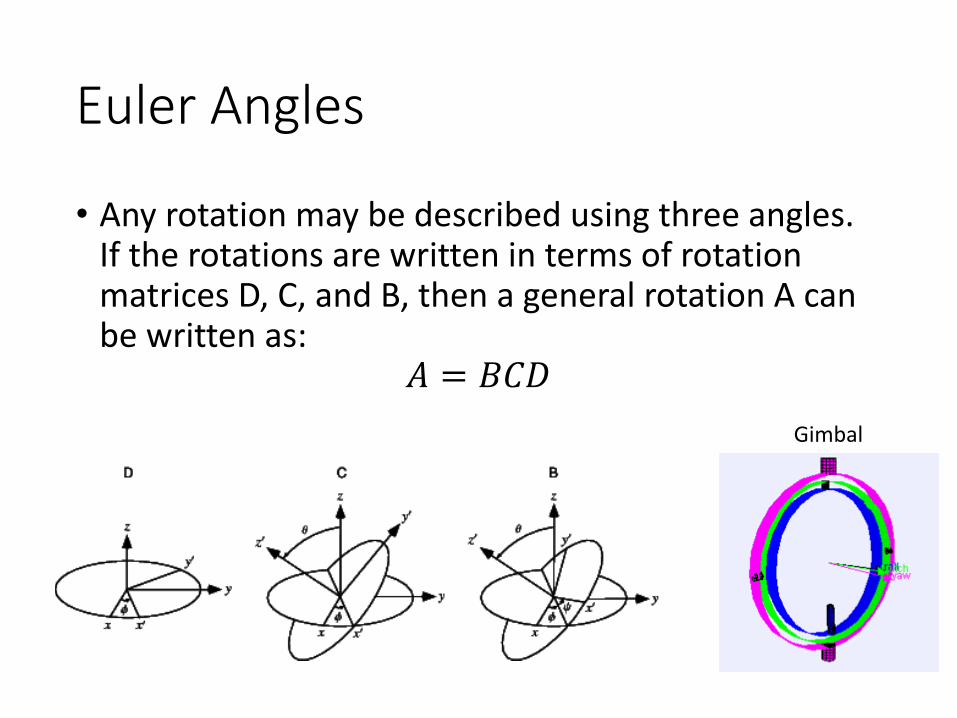
Euler Angles
• Any rotation may be described using three angles. If the rotations are written in terms of rotation matrices D, C, and B, then a general rotation A can be written as:
𝐴 = 𝐵𝐶𝐷
Gimbal
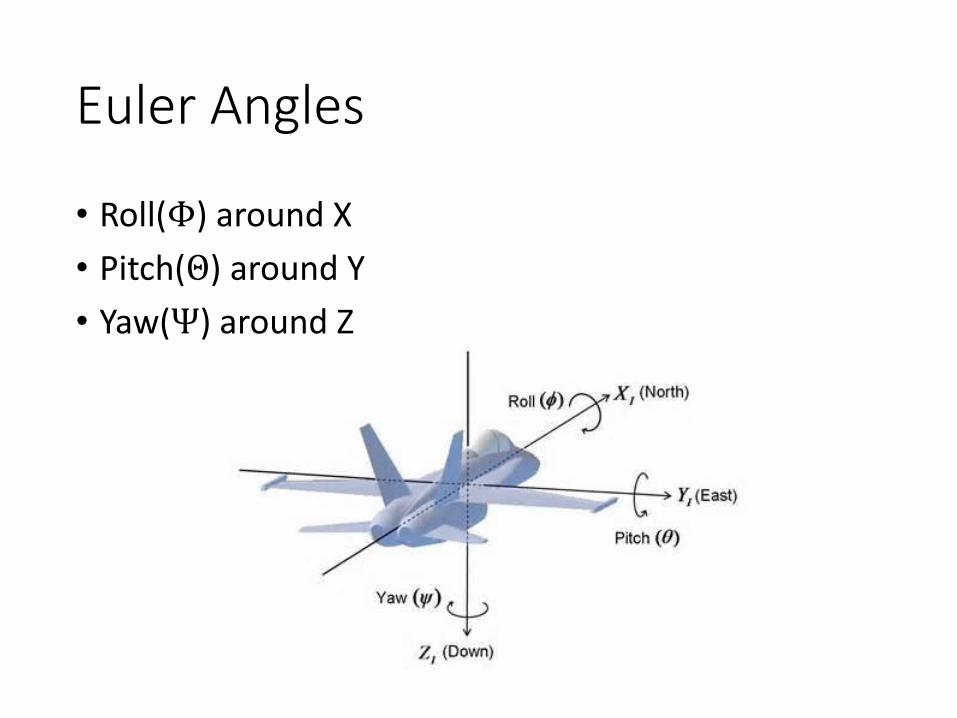
Euler Angles
• Roll(Φ) around X
• Pitch(Θ) around Y
• Yaw(Ψ) around Z
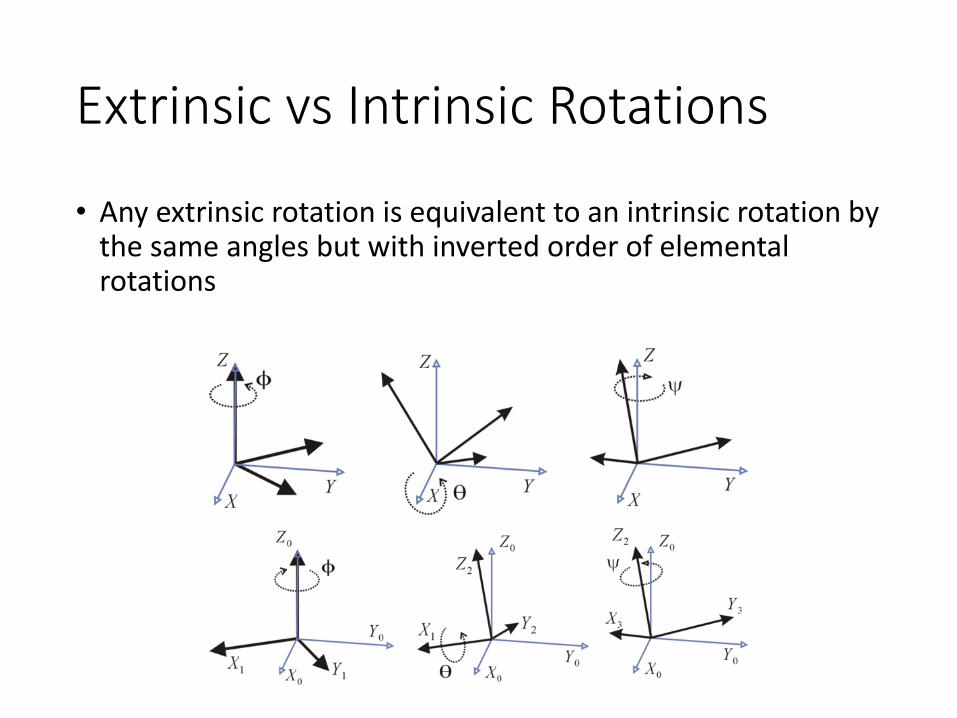
Extrinsic vs Intrinsic Rotations
• Any extrinsic rotation is equivalent to an intrinsic rotation by the same angles but with inverted order of elemental rotations
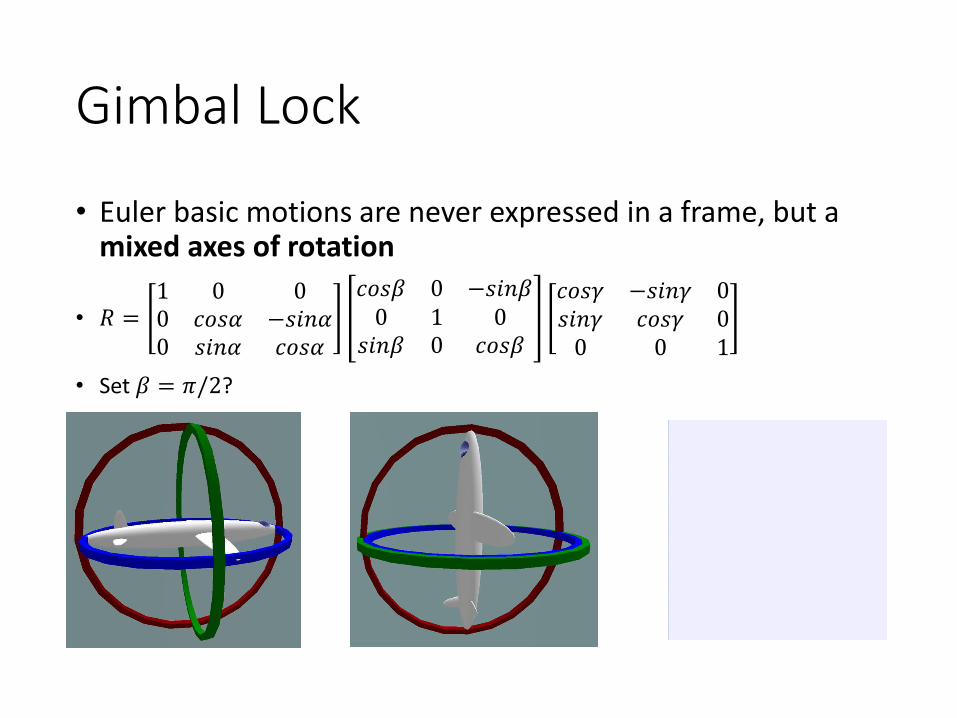
Gimbal Lock
• Euler basic motions are never expressed in a frame, but a mixed axes of rotation
• 𝑅 =1 0 00 𝑐𝑜𝑠𝛼 −𝑠𝑖𝑛𝛼0 𝑠𝑖𝑛𝛼 𝑐𝑜𝑠𝛼
𝑐𝑜𝑠𝛽 0 −𝑠𝑖𝑛𝛽0 1 0
𝑠𝑖𝑛𝛽 0 𝑐𝑜𝑠𝛽
𝑐𝑜𝑠𝛾 −𝑠𝑖𝑛𝛾 0𝑠𝑖𝑛𝛾 𝑐𝑜𝑠𝛾 00 0 1
• Set 𝛽 = 𝜋/2?
Matrices for Axis-angle Rotations
• Ruler angles are for coordinates axes• What if we want rotation about some random
axis?
• Compute by composing elementary transforms• Transform rotation axis to align with x axis
• Apply rotation
• Inverse transform back into position
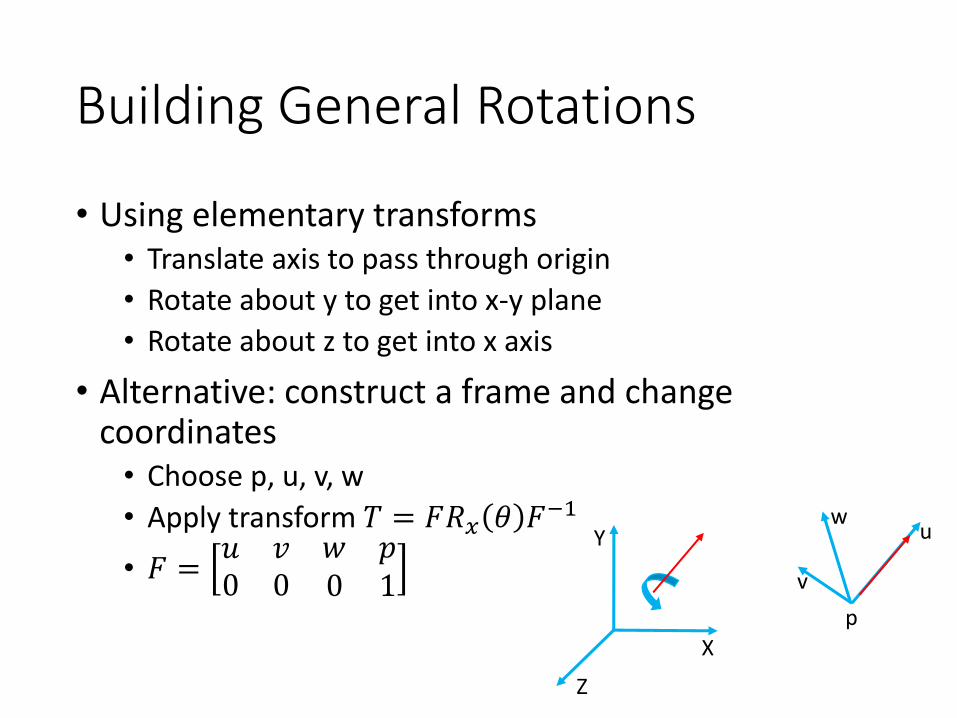
• Using elementary transforms• Translate axis to pass through origin
• Rotate about y to get into x-y plane
• Rotate about z to get into x axis
• Alternative: construct a frame and change coordinates• Choose p, u, v, w
• Apply transform 𝑇 = 𝐹𝑅𝑥 𝜃 𝐹−1
• 𝐹 =𝑢 𝑣0 0
𝑤 𝑝0 1
Building General Rotations
X
Y
Z
u
v
w
p
Quaternions
• Compare to Euler angles and Rotation matrices• Can avoid the gimbal lock
• Can smoothly interpolate over a sphere
• Representation• A quaternion is composed of one real element and three
complex elements
𝑞 = 𝑞0+𝑞1𝑖+𝑞2𝑗+𝑞3𝑘
𝑖2 = 𝑗2 = 𝑘2 = −1𝑖𝑗 = 𝑘, 𝑗𝑖 = −𝑘𝑗𝑘 = 𝑖, 𝑘𝑗 = −𝑖𝑘𝑖 = 𝑗, 𝑖𝑘 = −𝑗
Quaternions
• A rotation through an angle of 𝜃 around the axis
defined by a unit vector 𝑛 = 𝑛𝑥, 𝑛𝑦 , 𝑛𝑧𝑇
can be represented by a quaternion:
• Rotation matrix, Rotation Axis, Euler Angle and Quaternions are exchangeable.
𝑞= 𝑐𝑜𝑠𝜃
2, 𝑛𝑥 𝑠𝑖𝑛
𝜃
2, 𝑛𝑦 𝑠𝑖𝑛
𝜃
2, 𝑛𝑧 𝑠𝑖𝑛
𝜃
2
𝑇
• Questions?
Transformations with GLM
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>
…
glm::vec4 vec(1.0f, 0.0f, 0.0f, 1.0f);
glm::mat4 trans = glm::mat4(1.0f);
trans = glm::translate(trans, glm::vec3(1.0f, 1.0f, 0.0f));
trans = glm::rotate(trans, glm::radians(90.0f), glm::vec3(0.0, 0.0, 1.0));
vec = trans * vec;
References
• Ed Angel, CS/EECE 433 Computer Graphics, University of New Mexico
• Durand and Cuter, MIT EECS 6.837
• Steve Marschner, CS4620/5620 Computer Graphics, Cornell
• Tom Thorne, COMPUTER GRAPHICS, The University of Edinburgh
• Elif Tosun, Computer Graphics, The University of New York
• Lin Zhang, Computer Graphics, Tongji Unviersity










![Revision and Exam Tips - New SMART website · =====trtrt]=-tr-trtrtrtrtrtr-tr F 1F]ilflfrritfltrft tr-trtr=tr tr=tr==tr tr-tlF-lflft 71 trtr=trtrtr=tr trtrtrtrtr=trtr trtrtrtrtr==tr](https://img.pdfslide.net/doc/110x75/5ed679a2e7ed90307a0783ea/revision-and-exam-tips-new-smart-trtrt-tr-trtrtrtrtrtr-tr-f-1filflfrritfltrft.jpg)
![trtr trn tru tr[] ujosephschwartzdermatology.com/wp-content/uploads/... · trtr UEI trtr E] utr E] Y-ES tr tr B D tr tr tr tr tr NO tr EI tr u u u EI E tr OlherSystemic: Diobetes](https://img.pdfslide.net/doc/110x75/5f655dabeca5702d4204d061/trtr-trn-tru-tr-ujosep-trtr-uei-trtr-e-utr-e-y-es-tr-tr-b-d-tr-tr-tr-tr-tr-no.jpg)