Embed Size (px)
Citation preview

December 5, 2003 1
Mars and Beyond: NASA’s Software Challenges in the 21st Century
Dr. Michael R. LowryNASA Ames Research Center

December 5, 2003 2
Outline
• NASA’s Mission• Role of Software within NASA’s Mission• The Challenge: Enable Dependable SW-based Systems• Technical Challenges
– Scaling !– System-software barrier – Software is opaque and brittle in the large
• Reasons for Optimism

December 5, 2003 3
NASA’s Vision• To improve life here• To extend life to there• To find life beyond
NASA’s Mission• To understand and protect our home planet• To explore the universe and search for life• To inspire the next generation of explorers
…as only NASA can
5 Strategic Enterprises
One NASA
SpaceScience
EarthScience
Biological& Physical Research HEDS
AerospaceTechnology
December 5, 2003 4
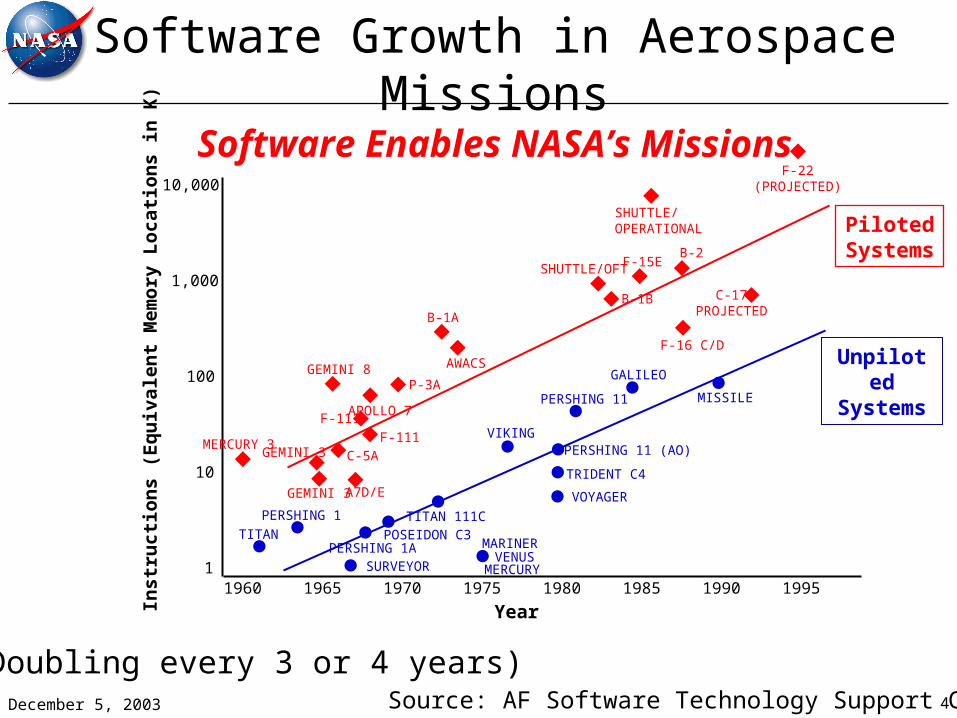
Software Growth in Aerospace MissionsSoftware Enables NASA’s Missions
1960 1965 1970 1975 1980 1985 1990 19951
10
100
1,000
10,000
Inst
ruct
ion
s (E
qu
ival
ent
Mem
ory
Lo
cati
on
s in
K)
Year
Source: AF Software Technology Support Center
TITAN
VENUSMERCURY
PERSHING 1
SURVEYORPERSHING 1A
POSEIDON C3TITAN 111C
VIKING
PERSHING 11
GALILEO
MISSILE
PERSHING 11 (AO)
TRIDENT C4
VOYAGER
MARINER
UnpilotedSystems
C-17PROJECTED
C-5A
A7D/E
F-111
P-3A
B-1A
AWACS
B-1B
F-15EB-2
F-16 C/D
F-22(PROJECTED)
F-111
GEMINI 3
PilotedSystems
GEMINI 3
APOLLO 7
GEMINI 8
SHUTTLE/OFT
MERCURY 3
SHUTTLE/OPERATIONAL
(Doubling every 3 or 4 years)

December 5, 2003 5
The Challenge: Software Risk Factors
Linear Complex
Tight
Loose
INTERACTIONS
COUPLING
Post Office
Most manufacturing
Junior college
Trade schools
Nuclear plant
Military early-warning
Space missions
Chemical plants
Aircraft
Universities
MiningR&D firms
Military actions
Power grids
Airways
Dams
Rail transport
Marine transport

December 5, 2003 6
Mars Climate Orbiter
• Launched– 11 Dec 1998
• Mission– interplanetary weather satellite– communications relay for Mars
Polar Lander
• Fate:– Arrived 23 Sept 1999– No signal received after initial
orbit insertion
• Cause:– Faulty navigation data caused by
failure to convert imperial to metric units

December 5, 2003 7
MCO Events
• Locus of error– Ground software file called “Small Forces” gives thruster performance data
– This data is used to process telemetry from the spacecraft• Spacecraft signals each Angular Momentum Desaturation (AMD) maneuver• Small Forces data used to compute effect on trajectory• Software underestimated effect by factor of 4.45
• Cause of error– Small Forces Data given in Pounds-seconds (lbf-s)
– The specification called for Newton-seconds (N-s)
• Result of error– As spacecraft approaches orbit insertion, trajectory is corrected
• Aimed for periapse of 226km on first orbit
– Estimates were adjusted as the spacecraft approached orbit insertion:• 1 week prior: first periapse estimated at 150-170km• 1 hour prior: this was down to 110km• Minimum periapse considered survivable is 80km
– MCO entered Mars occultation 49 seconds earlier than predicted• Signal was never regained after the predicted 21 minute occultation• Subsequent analysis estimates first periapse of 57km

December 5, 2003 8
Contributing Factors
• First 4 months, AMD data unusable due to file format errors
– Navigators calculated the data by hand
– File format fixed by April 1999
– Anomalies in the computed trajectory became apparent almost immediately
• Limited ability to investigate the anomalies:– Thrust effects measured along Earth-spacecraft
line of sight using doppler shift
– AMD thrusts are mainly perpendicular to line of sight
• Failure to communicate between teams:– E.g. Issue tracking system not properly used by
navigation team• Anomalies were not properly investigated
• Inadequate staffing– Operations team were monitoring three missions
simultaneously (MGS, MCO and MPL)
• Operations Navigation team unfamiliar with spacecraft
– Different team from the development and test team
– This team did not fully understand the significance of the anomalies
– Assumed familiarity with previous mission (Global Surveyor) was sufficient:
• did not understand why AMD was performed 10-14 times more often
• (MCO has asymmetric solar panels, whereas MGS had symmetric panels)
• Inadequate Testing– Software Interface Specification was not used
during unit testing of small forces software
– End-to-end test of ground software was never completed
– Ground software was not considered “mission critical” so didn’t have independent V&V
• Inadequate Reviews– Key personnel missing from critical design
reviews

December 5, 2003 9
Analysis
• Software size, S, increasing exponentially(doubling every three or four years)
• Errors, cost over-runs, schedule slip due primarily to non-local dependencies during integration (SN , with N<2, best calibration: N=1.2 )
Source: Professor Barry Boehm, Author of Software Cost Modeling
SW Size
Errors

December 5, 2003 10
Predicted Errors as LOC Grows:Current SW Practices/Technology
0.025
0.4
6.3
100
0.01
0.1
1
10
100
10K 100K 1M 10M
Lines of Code
Predicted Errors
Errors = e SN; where S is the number of modules (LOC/M), and error rate e = 1/10,000
Cassini MPL

December 5, 2003 11
Future Mars Exploration: MSL and MSR

December 5, 2003 12
Beyond Mars: JIMO and TPF

December 5, 2003 13
Technical Challenges and Opportunities
• System-software barrier – (Verification is easy, validation is hard)
• Software is transparent and malleable in the small…– But opaque and brittle in the large
• General-purpose software dependability tools work well in the small– But fail to scale to systems in the large.
But there is Reason for OptimismAlign software architectures with system analysisSuccess of formal methods in related field of digital hardware
Scaling through specialization
Divide and Conquer: compositional reasoning
Beyond correctness: exploiting the lattice between true and false for software understanding
Providing the research community with realistic experimental testbeds at scale
December 5, 2003 14
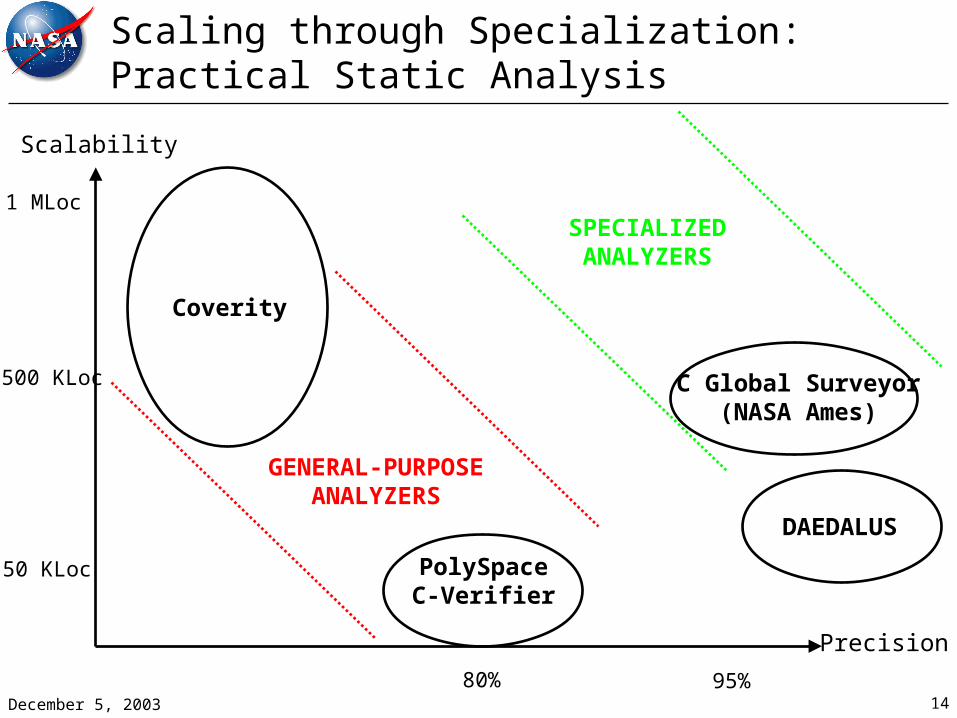
Scaling through Specialization:Practical Static Analysis
PolySpaceC-Verifier
C Global Surveyor(NASA Ames)
DAEDALUS
Coverity
Scalability
Precision
1 MLoc
500 KLoc
50 KLoc
80% 95%
GENERAL-PURPOSEANALYZERS
SPECIALIZEDANALYZERS

December 5, 2003 15
void add(Object o) { buffer[head] = o; head = (head+1)%size;}
Object take() { tail=(tail+1)%size; return buffer[tail];}
Code with Transient Error
Hard to Show ErrorTesting cannot reliably show
the error appearing, since it may require specific
environment actions (inputs) or scheduling (for concurrency errors)
Hard to Find Cause of the Error
Once we know a way to show the error it is difficult to
localize the root cause of the error
+
void add(Object o) { buffer[head] = o; head = (head+1)%size;}
Object take() { tail=(tail+1)%size; return buffer[tail];}
SoftwareModel Checker
JPF
void add(Object o) { buffer[head] = o; head = (head+1)%size;}
Object take() { tail=(tail+1)%size; return buffer[tail];}
Produces Error Trace
ErrorExplanation
Localize Causeof the Error
A model checker can automatically find a trace that show the error appearing
Now we can automatically find an explanation for the error from the error trace produced by the model checker and the original program
The algorithm uses model checking to first find similar traces that also cause the error (negatives) and
traces that do not cause the error (positives)
Set of PositivesTraces that don’t show
the error
Set of NegativesTraces that show different
versions of the errorAnalysis
Explaining the Cause of an Error
1. Source code similarities to explain control errors• code that appear only in negatives• all negatives, and, • only and all negatives (causal)
2. Data invariants – explains errors in data3. Minimal transformations to create a negative from a positive – show the essence of an error

December 5, 2003 16( = “unknown yet”)
Our novel symbolic execution framework:- extends model checking to programs that have complex inputs with unbounded (very large) data- automates test input generation
Generalized Symbolic Execution for Model Checking and Testing
input program
Model checking
Program instrumentation
Decision procedures
instrumented program
correctness specification
continue/backtrack
counterexample(s)/test suite
[heap+constraint+thread scheduling]
Framework:
Future mission software: - concurrent - complex, dynamically allocated data structures (e.g., lists or trees)- highly interactive:
- with complex inputs - large environment
- should be extremely reliable
- testing: - requires manual input - typically done for a few nominal input cases- not good at finding concurrency bugs- not good at dealing with complex data structures
void Executive::startExecutive(){ runThreads(); …}void Executive::executePlan(…) { while(!empty) executeCurrentPlanNode();} …
Rover Executive
execute action
environment/rover status
Input plan
complex input structure
large environment data
concurrency,dynamic data (lists, trees)
- model checking: - automatic, good at finding concurrency bugs - not good at dealing with complex data structures - feasible only with a small environment
- and a small set of input values
Current practice in checking complex software:
- modular architecture: can use different model checkers/decision procedures
class Node { int elem; Node next; Node deleteFirst() { if (elem < 10) return next; else if (elem < 0) assert(false); … } }
Code
Analysis of “deleteFirst” with our framework
-“simulate” the code using symbolic values instead of program data; enumerate the input structures lazily
e0 ≥ 10 /\ e0<0
e0 < 10 e0 ≥ 10
true false
true
FALSE
Precondition: acyclic list
Numeric Constraints
Decision Procedures
Structural Constraints
Lazy initialization+Enumerate all structures
e0nulle0
e0
e0 e1

December 5, 2003 17
System-Level Verification
code code
Design
Implementation
check
monitor
architecture description + module specifications
check (system-level) integration properties based on module specificationsmodule hierarchy and interfaces used for incremental abstractionarchitectural patterns potentially reusablegenerate module/environment assumptions
check implementation modules against their design specifications
monitor properties that cannot be verified
monitor environment assumptions

December 5, 2003 18
Module Verification
• Modules may require context information to satisfy a property
• Assumption || Module ╞ Property (assume – guarantee reasoning)
Environment
Module
a b c
Property
Assumption
• Developer encodes them
• Abstractions of environment, if known
how are assumptions obtained?
• Automatically generate exact assumption A– for any environment E
(E || Module ╞ Property) IFF E╞ A
• Demonstrated on Rover example
Automated Software Engineering 2002

December 5, 2003 19
Mission Manager Viewpoint
Asking the Right QuestionsWhen can we stop testing?What process should we use?What is the value of formal methods?
Qualitative Correlative Model
Peer Review superior to testing for incorrect spec
Model Checking for uncertain environments
Quantitative Predictive ModelMission trade studies: how muchcost for acceptable riskDevelopment: optimize use ofAssurance technologiesMission: increase use of CPUcycles for software monitoring

December 5, 2003 20
HDCP Goals
The overall mission of the HDCP project is to increase the ability of NASA to engineer highly dependable software systems
Method:– Science of Dependability:
• Develop better ways to measure and predict software dependability– What are the potential measurables for the various
attributes?– How can we move past the present surrogates and
approach the artifact more directly?– Empirical evaluation
• of NASA and NASA-contractor dependability problems
• of technologies and engineering principles to address the problems
– Testbeds• Development of realistic testbeds for empirical evaluation of
technologies and attributes.
– Intervention technologies

December 5, 2003 21
Active MDS Testbed Projects
• Golden Gate Project– Demonstrate that RT-Java is suitable for mission systems– Drive MDS/RTSJ rover at JavaOne– Collaborators: Champlin, Giovannoni
• SCRover Project– Develop rover testbed– Collection defect and process data for experience base– Collaborators: Boehm, Madachy, Medvidovic, Port
• Dependability cases– Develop dependability cases for time management and software
architectures– Collaborators: Goodenough, Weinstock, Maxion, Hudak
• Analysis of MDS architectural style– Analysis based on MDS use architectural-components types– Collaborators: Garlan
• Process improvement– Data collection from mainline MDS and SCRover development efforts– Collaborators: Johnson, Port

December 5, 2003 22
MDS in 1 Minute
Approach
Product line practice to exploit commonalities across missions:
An information and control architecture to which missions/products conform
A systems engineering process that is analytical, disciplined, and methodical
Reusable and adaptable framework software
Problem Domain
Mission information, control, and operations of physical systems
• Developed for unmanned space science missions
• Scope includes flight, ground and simulation/test
• Applicable to robots that operate autonomously to achieve goals specified by humans
• Architecturally suited for complex systems where “everything affects everything”
MDS ProductsMDS Products Unified flight, ground and test architecture
Orderly systems engineering methodology
Frameworks (C++ and Java)
Processes, tools, and documentation
Examples
Reusable software

December 5, 2003 23
Component-BasedArchitecture
• Handles interactionsamong elementsof the system software
• Inward looking• Addresses software
engineering issues
State-BasedArchitecture
• Handles interactionsamong elementsof the system under control
• Outward looking• Addresses systems
engineering issues
Managing Interactions
• Complex interactions make software difficult– Elements that work separately often fail to work together– Combinatorics of interaction is staggering, so it’s not easy to get right– This is a major source of unreliability
• There are two approaches to this in MDS:
“A unified approach to managing interactions is essential”

December 5, 2003 24
MDS is…
State-Based ArchitectureState variables hold state values, including degree of uncertainty
Estimators interpret measurement and command evidence to estimate state
Controllers issue commands, striving to achieve goals
Hardware proxies provide access to hardware busses, devices, instruments
Models express mission-specific relations among states, commands, and measurements
A goal is a constraint on the value of a state variable over a time interval
Key Features: Systems analysis/design organized around states and models State control architecturally separated from state determination System operated via specifications of intent: goals on state

December 5, 2003 25
From theory to flight...
JPL Transition Path
• Mars Smart Lander (MSL) Technology Infusion– Scheduled Launch: 2009– MSL has baselined MDS technology
• System engineering• Software frameworks
– MSL Technology Gates• PMSR August, 2004• Integrated demo June, 2005• PDR February, 2006
• MSL sample technology categories– Software architecture with infused technologies– Verification and Validation tools and
methodologies– Processes and supporting tools– Cost modeling for system engineering, software
adaptation and autonomy validationMDS compatible technologies are directly relevant to MSL

December 5, 2003 26
Conclusions
• System-software barrier – (Verification is easy, validation is hard)
• Software is transparent and malleable in the small…– But opaque and brittle in the large
• General-purpose software dependability tools work well in the small– But fail to scale to systems in the large.
But there is Reason for OptimismAlign software architectures with system analysisSuccess of formal methods in related field of digital hardware
Scaling through specialization
Divide and Conquer: compositional reasoning
Beyond correctness: exploiting the lattice between true and false for software understanding
Providing the research community with realistic experimental testbeds at scale