Embed Size (px)
Citation preview

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Lyapunov-Exponent als (In-)Stabilitätsmaß
Daniel Härtl
27. Juni 2006

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Inhalt
1 EinführungMotivationDynamische SystemeSinguläre Punkte
2 Diskrete dynamische SystemeDefinition des Lyapunov-ExponentenBedeutung des Lyapunov-ExponentenBeispiel: Die logistsche Abbildung
3 Kontinuierliche dynamische SystemeDer 1-dimensionale FallDer mehrdimensionale FallBedeutung der Lyapunov-ExponentenBeispiel: Der gedämpfte harmonische Oszillator
4 Zusammenfassung

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Inhalt
1 EinführungMotivationDynamische SystemeSinguläre Punkte
2 Diskrete dynamische SystemeDefinition des Lyapunov-ExponentenBedeutung des Lyapunov-ExponentenBeispiel: Die logistsche Abbildung
3 Kontinuierliche dynamische SystemeDer 1-dimensionale FallDer mehrdimensionale FallBedeutung der Lyapunov-ExponentenBeispiel: Der gedämpfte harmonische Oszillator
4 Zusammenfassung

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Inhalt
1 EinführungMotivationDynamische SystemeSinguläre Punkte
2 Diskrete dynamische SystemeDefinition des Lyapunov-ExponentenBedeutung des Lyapunov-ExponentenBeispiel: Die logistsche Abbildung
3 Kontinuierliche dynamische SystemeDer 1-dimensionale FallDer mehrdimensionale FallBedeutung der Lyapunov-ExponentenBeispiel: Der gedämpfte harmonische Oszillator
4 Zusammenfassung

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Inhalt
1 EinführungMotivationDynamische SystemeSinguläre Punkte
2 Diskrete dynamische SystemeDefinition des Lyapunov-ExponentenBedeutung des Lyapunov-ExponentenBeispiel: Die logistsche Abbildung
3 Kontinuierliche dynamische SystemeDer 1-dimensionale FallDer mehrdimensionale FallBedeutung der Lyapunov-ExponentenBeispiel: Der gedämpfte harmonische Oszillator
4 Zusammenfassung

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Motivation
Henri Poincaré (1912)“Es kann vorkommen, dass kleine Unterschiede in denAnfangsbedingungen große im Endergebnis zur Folge haben.(...) Vorhersage wird unmöglich und wir haben ein zufälligesPhänomen.”
Beispiele:Pendel über MagnetenBouncing BallPopulationsdynamik

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Motivation
Henri Poincaré (1912)“Es kann vorkommen, dass kleine Unterschiede in denAnfangsbedingungen große im Endergebnis zur Folge haben.(...) Vorhersage wird unmöglich und wir haben ein zufälligesPhänomen.”
Beispiele:Pendel über MagnetenBouncing BallPopulationsdynamik

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Das Sinai-Billiard
Wir betrachten ein Modell-Billiard-Spiel mit einer Kugel unterfolgenden Annahmen:
Es gibt keine Reibung.An den Banden gilt das Reflexionsgesetz.
Kleinste Abweichungen in den Anfangsbedingungen führen zuvöllig verschiedenen Bahnen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Das Sinai-Billiard
Wir betrachten ein Modell-Billiard-Spiel mit einer Kugel unterfolgenden Annahmen:
Es gibt keine Reibung.An den Banden gilt das Reflexionsgesetz.
Kleinste Abweichungen in den Anfangsbedingungen führen zuvöllig verschiedenen Bahnen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Das Sinai-Billiard
Wir betrachten ein Modell-Billiard-Spiel mit einer Kugel unterfolgenden Annahmen:
Es gibt keine Reibung.An den Banden gilt das Reflexionsgesetz.
Kleinste Abweichungen in den Anfangsbedingungen führen zuvöllig verschiedenen Bahnen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Dynamische Systeme im m-dim. Phasenraum
Ein physikalisches System wird durch zeitabhängigeSystemgrößen xi(t), (i = 1 . . . m), beschrieben. Kurz x(t).
Falls t kontinuierlich ist, so wird die zeitliche Änderung vonx(t) beschrieben durch
dxdt
= F (x). (1)
F heißt Fluß des DGL-Systems.
Wenn t diskret ist, so wird die zeitliche Entwicklung von xbestimmt durch
xn+1 = f (xn). (2)
Der Fluß F und die Abbildung f können zusätzlich noch vonParametern p abhängen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Dynamische Systeme im m-dim. Phasenraum
Ein physikalisches System wird durch zeitabhängigeSystemgrößen xi(t), (i = 1 . . . m), beschrieben. Kurz x(t).
Falls t kontinuierlich ist, so wird die zeitliche Änderung vonx(t) beschrieben durch
dxdt
= F (x). (1)
F heißt Fluß des DGL-Systems.
Wenn t diskret ist, so wird die zeitliche Entwicklung von xbestimmt durch
xn+1 = f (xn). (2)
Der Fluß F und die Abbildung f können zusätzlich noch vonParametern p abhängen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Dynamische Systeme im m-dim. Phasenraum
Ein physikalisches System wird durch zeitabhängigeSystemgrößen xi(t), (i = 1 . . . m), beschrieben. Kurz x(t).
Falls t kontinuierlich ist, so wird die zeitliche Änderung vonx(t) beschrieben durch
dxdt
= F (x). (1)
F heißt Fluß des DGL-Systems.
Wenn t diskret ist, so wird die zeitliche Entwicklung von xbestimmt durch
xn+1 = f (xn). (2)
Der Fluß F und die Abbildung f können zusätzlich noch vonParametern p abhängen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Dynamische Systeme im m-dim. Phasenraum
Ein physikalisches System wird durch zeitabhängigeSystemgrößen xi(t), (i = 1 . . . m), beschrieben. Kurz x(t).
Falls t kontinuierlich ist, so wird die zeitliche Änderung vonx(t) beschrieben durch
dxdt
= F (x , p). (1)
F heißt Fluß des DGL-Systems.
Wenn t diskret ist, so wird die zeitliche Entwicklung von xbestimmt durch
xn+1 = f (xn, p). (2)
Der Fluß F und die Abbildung f können zusätzlich noch vonParametern p abhängen.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Singuläre Punkte in dynamischen Systemen
Die singulären Punkte im kontinuierlichen Fall sind gegebendurch
F (x) = 0.
Bei den singulären Punkten kann es sich um Knoten-, Sattel-,Wirbel- oder Strudelpunkte handeln.
Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Singuläre Punkte in dynamischen Systemen
Für diskrete Zeitparameter ergeben sich die singulären Punkteaus
f (xn) = xn.
Die Stabilitätseigenschaften der singulären Punktecharakterisieren ein dynamisches System nur lokal.
Im Folgendem wird der Lyapunov-Exponent als Maß fürdie (In-)Stabilität von Trajektorien definiert.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Singuläre Punkte in dynamischen Systemen
Für diskrete Zeitparameter ergeben sich die singulären Punkteaus
f (xn) = xn.
Die Stabilitätseigenschaften der singulären Punktecharakterisieren ein dynamisches System nur lokal.
Im Folgendem wird der Lyapunov-Exponent als Maß fürdie (In-)Stabilität von Trajektorien definiert.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Singuläre Punkte in dynamischen Systemen
Für diskrete Zeitparameter ergeben sich die singulären Punkteaus
f (xn) = xn.
Die Stabilitätseigenschaften der singulären Punktecharakterisieren ein dynamisches System nur lokal.
Im Folgendem wird der Lyapunov-Exponent als Maß fürdie (In-)Stabilität von Trajektorien definiert.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Definition des Lyapunov-Exponenten
Wir betrachten ein diskretes 1-dim. dynamisches System
xn+1 = f (xn)
mit den Anfangszuständen x0 und x0 + ε, (ε � 1).
Nach n Iterationen ergibt sich für diese f n(x0) bzw.f n(x0 + ε).
Der Lyanpunov-Exponent λ(x0) misst, wie sich derAbstand zwischen x0 und x0 + ε exponentiell verändert.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Definition des Lyapunov-Exponenten
Wir betrachten ein diskretes 1-dim. dynamisches System
xn+1 = f (xn)
mit den Anfangszuständen x0 und x0 + ε, (ε � 1).
Nach n Iterationen ergibt sich für diese f n(x0) bzw.f n(x0 + ε).
Der Lyanpunov-Exponent λ(x0) misst, wie sich derAbstand zwischen x0 und x0 + ε exponentiell verändert.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Definition des Lyapunov-Exponenten
Wir betrachten ein diskretes 1-dim. dynamisches System
xn+1 = f (xn)
mit den Anfangszuständen x0 und x0 + ε, (ε � 1).
Nach n Iterationen ergibt sich für diese f n(x0) bzw.f n(x0 + ε).
Der Lyanpunov-Exponent λ(x0) misst, wie sich derAbstand zwischen x0 und x0 + ε exponentiell verändert.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Also gilt:
ε · exp(nλ(x0)) = |f n(x0 + ε)− f n(x0)|
λ(x0) =1n· log
∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣Definition des Lyapunov-Exponenten (diskret, 1-dim.)
λ(x0) = limn→∞
limε→0
1n
log∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣= lim
n→∞
1n
log∣∣∣∣df n(x)
dx
∣∣∣∣x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Also gilt:
ε · exp(nλ(x0)) = |f n(x0 + ε)− f n(x0)|
λ(x0) =1n· log
∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣Definition des Lyapunov-Exponenten (diskret, 1-dim.)
λ(x0) = limn→∞
limε→0
1n
log∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣= lim
n→∞
1n
log∣∣∣∣df n(x)
dx
∣∣∣∣x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Also gilt:
ε · exp(nλ(x0)) = |f n(x0 + ε)− f n(x0)|
λ(x0) =1n· log
∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣Definition des Lyapunov-Exponenten (diskret, 1-dim.)
λ(x0) = limn→∞
limε→0
1n
log∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣= lim
n→∞
1n
log∣∣∣∣df n(x)
dx
∣∣∣∣x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Also gilt:
ε · exp(nλ(x0)) = |f n(x0 + ε)− f n(x0)|
λ(x0) =1n· log
∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣Definition des Lyapunov-Exponenten (diskret, 1-dim.)
λ(x0) = limn→∞
limε→0
1n
log∣∣∣∣ f n(x0 + ε)− f n(x0)
ε
∣∣∣∣= lim
n→∞
1n
log∣∣∣∣df n(x)
dx
∣∣∣∣x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Umformung
Mit Kettenregel und vollständiger Induktion folgt:
ddx
f 2(x)
∣∣∣∣x0
=d
dxf [f (x)]
∣∣∣∣x0
= f ′[f (x0)]f ′(x0) = f ′(x1)f ′(x0),
ddx
f n(x)
∣∣∣∣x0
=n−1∏i=0
f ′(xi).
Eingesetzt in Formel (3) 1 erhält man
λ(x0) = limn→∞
1n
log
∣∣∣∣∣n−1∏i=0
f ′(xi)
∣∣∣∣∣ = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ . (4)
1
λ(x0) = limn→∞
1n
log˛df n(x)
dx
˛x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Umformung
Mit Kettenregel und vollständiger Induktion folgt:
ddx
f 2(x)
∣∣∣∣x0
=d
dxf [f (x)]
∣∣∣∣x0
= f ′[f (x0)]f ′(x0) = f ′(x1)f ′(x0),
ddx
f n(x)
∣∣∣∣x0
=n−1∏i=0
f ′(xi).
Eingesetzt in Formel (3) 1 erhält man
λ(x0) = limn→∞
1n
log
∣∣∣∣∣n−1∏i=0
f ′(xi)
∣∣∣∣∣ = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ . (4)
1
λ(x0) = limn→∞
1n
log˛df n(x)
dx
˛x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Umformung
Mit Kettenregel und vollständiger Induktion folgt:
ddx
f 2(x)
∣∣∣∣x0
=d
dxf [f (x)]
∣∣∣∣x0
= f ′[f (x0)]f ′(x0) = f ′(x1)f ′(x0),
ddx
f n(x)
∣∣∣∣x0
=n−1∏i=0
f ′(xi).
Eingesetzt in Formel (3) 1 erhält man
λ(x0) = limn→∞
1n
log
∣∣∣∣∣n−1∏i=0
f ′(xi)
∣∣∣∣∣ = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ . (4)
1
λ(x0) = limn→∞
1n
log˛df n(x)
dx
˛x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Umformung
Mit Kettenregel und vollständiger Induktion folgt:
ddx
f 2(x)
∣∣∣∣x0
=d
dxf [f (x)]
∣∣∣∣x0
= f ′[f (x0)]f ′(x0) = f ′(x1)f ′(x0),
ddx
f n(x)
∣∣∣∣x0
=n−1∏i=0
f ′(xi).
Eingesetzt in Formel (3) 1 erhält man
λ(x0) = limn→∞
1n
log
∣∣∣∣∣n−1∏i=0
f ′(xi)
∣∣∣∣∣ = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ . (4)
1
λ(x0) = limn→∞
1n
log˛df n(x)
dx
˛x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Umformung
Mit Kettenregel und vollständiger Induktion folgt:
ddx
f 2(x)
∣∣∣∣x0
=d
dxf [f (x)]
∣∣∣∣x0
= f ′[f (x0)]f ′(x0) = f ′(x1)f ′(x0),
ddx
f n(x)
∣∣∣∣x0
=n−1∏i=0
f ′(xi).
Eingesetzt in Formel (3) 1 erhält man
λ(x0) = limn→∞
1n
log
∣∣∣∣∣n−1∏i=0
f ′(xi)
∣∣∣∣∣ = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ . (4)
1
λ(x0) = limn→∞
1n
log˛df n(x)
dx
˛x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Umformung
Mit Kettenregel und vollständiger Induktion folgt:
ddx
f 2(x)
∣∣∣∣x0
=d
dxf [f (x)]
∣∣∣∣x0
= f ′[f (x0)]f ′(x0) = f ′(x1)f ′(x0),
ddx
f n(x)
∣∣∣∣x0
=n−1∏i=0
f ′(xi).
Eingesetzt in Formel (3) 1 erhält man
λ(x0) = limn→∞
1n
log
∣∣∣∣∣n−1∏i=0
f ′(xi)
∣∣∣∣∣ = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ . (4)
1
λ(x0) = limn→∞
1n
log˛df n(x)
dx
˛x0
(3)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Bedeutung
Damit ist offensichtlich:λ(x0) < 0: Trajektorie ist asymptotisch stabil.λ(x0) = 0: Trajektorie ist Lyapunov-stabil.λ(x0) > 0: Trajektorie ist instabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Die logistische Abbildung
Die quadratische Abbildung f (x , p) = p · x(1− x) definiert dasdynamische System
xn+1 = p · xn(1− xn). (5)
Anwendung:Populationswachstum auf beschränktem Gebiet (1845,Verhulst)Sparkonto mit selbstbegrenzender Zinsrate (1984, Peitgenund Richter)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Die logistische Abbildung
Die quadratische Abbildung f (x , p) = p · x(1− x) definiert dasdynamische System
xn+1 = p · xn(1− xn). (5)
Anwendung:Populationswachstum auf beschränktem Gebiet (1845,Verhulst)Sparkonto mit selbstbegrenzender Zinsrate (1984, Peitgenund Richter)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
xn+1 = 2x(1− x)
Unabhängig vom Startwert x0 ∈ (0 . . . 1) streben alleTrajektorien gegen den singulären Punkt 0.5:
limn→∞
= 0.5
Der Punkt 0.5 ist Attraktor, das System ist stabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
xn+1 = 2x(1− x)
Unabhängig vom Startwert x0 ∈ (0 . . . 1) streben alleTrajektorien gegen den singulären Punkt 0.5:
limn→∞
= 0.5
Der Punkt 0.5 ist Attraktor, das System ist stabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
xn+1 = 2x(1− x)
Unabhängig vom Startwert x0 ∈ (0 . . . 1) streben alleTrajektorien gegen den singulären Punkt 0.5:
limn→∞
= 0.5
Der Punkt 0.5 ist Attraktor, das System ist stabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
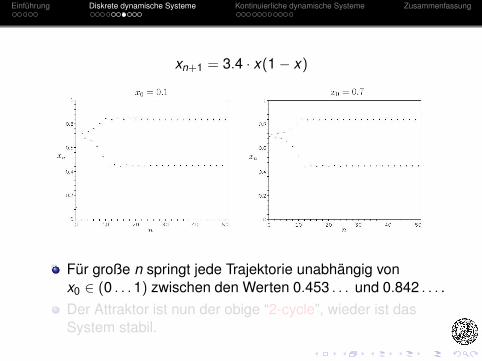
xn+1 = 3.4 · x(1− x)
Für große n springt jede Trajektorie unabhängig vonx0 ∈ (0 . . . 1) zwischen den Werten 0.453 . . . und 0.842 . . . .Der Attraktor ist nun der obige “2-cycle”, wieder ist dasSystem stabil.
Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
xn+1 = 3.4 · x(1− x)
Für große n springt jede Trajektorie unabhängig vonx0 ∈ (0 . . . 1) zwischen den Werten 0.453 . . . und 0.842 . . . .Der Attraktor ist nun der obige “2-cycle”, wieder ist dasSystem stabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
xn+1 = 3.4 · x(1− x)
Für große n springt jede Trajektorie unabhängig vonx0 ∈ (0 . . . 1) zwischen den Werten 0.453 . . . und 0.842 . . . .Der Attraktor ist nun der obige “2-cycle”, wieder ist dasSystem stabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Attraktor ist abhängig vom Parameter p.Wir wählen x0 = 0.7 fest und tragen x301 . . . x400 gegen pauf.
Für p / 3.55 kommt es zu Bifurkationen: zuerst tretenPunktattraktoren auf, dann “2-cycles”, “4-cycles”,. . . (Periodenverdoppelung)Für p ' 3.55 zeigen die Trajektorien keinKonvergenzverhalten.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Attraktor ist abhängig vom Parameter p.Wir wählen x0 = 0.7 fest und tragen x301 . . . x400 gegen pauf.
Für p / 3.55 kommt es zu Bifurkationen: zuerst tretenPunktattraktoren auf, dann “2-cycles”, “4-cycles”,. . . (Periodenverdoppelung)Für p ' 3.55 zeigen die Trajektorien keinKonvergenzverhalten.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Attraktor ist abhängig vom Parameter p.Wir wählen x0 = 0.7 fest und tragen x301 . . . x400 gegen pauf.
Für p / 3.55 kommt es zu Bifurkationen: zuerst tretenPunktattraktoren auf, dann “2-cycles”, “4-cycles”,. . . (Periodenverdoppelung)Für p ' 3.55 zeigen die Trajektorien keinKonvergenzverhalten.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Berechnung des Lyapunov-Exponenten
Der Lyapunov-Exponent kann hier mit Formel (4)berechnet werden:
λ(x0) = limn→∞
1n
n−1∑i=0
log∣∣f ′(xi)
∣∣ ≈ 1400
399∑i=0
log∣∣f ′(xi)
∣∣ ..
Man erhält folgendes Diagramm (x0 = 0.7)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Lyapunov-Exponent für 1-dim. kont. Systeme
Das dynamische System ist gegeben durch
dx(t)dt
= F (x).
Wähle zwei Trajektorien x(t) und y(t) mit den Startwertenx(0) = x0 und y(0) = y0 = x0 + ε, ε � 1, d.h.Notation:
x(t) = x(t , x0),
y(t) = x(t , x0 + ε).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Lyapunov-Exponent für 1-dim. kont. Systeme
Das dynamische System ist gegeben durch
dx(t)dt
= F (x).
Wähle zwei Trajektorien x(t) und y(t) mit den Startwertenx(0) = x0 und y(0) = y0 = x0 + ε, ε � 1, d.h.Notation:
x(t) = x(t , x0),
y(t) = x(t , x0 + ε).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Lyapunov-Exponent für 1-dim. kont. Systeme
Das dynamische System ist gegeben durch
dx(t)dt
= F (x).
Wähle zwei Trajektorien x(t) und y(t) mit den Startwertenx(0) = x0 und y(0) = y0 = x0 + ε, ε � 1, d.h.Notation:
x(t) = x(t , x0),
y(t) = x(t , x0 + ε).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
ε · exp(λ(x0)t) = |x(t , x0 + ε)− x(t , x0)|
λ(x0) = limt→∞
limε→0
1t
log∣∣∣∣x(t , x0 + ε)− x(t , x0)
ε
∣∣∣∣ (6)
Definition des Lyapunov-Exponenten (kont., 1-dim.)
λ(x0) = limt→∞
1t
log∣∣∣∣∂x(t , x0)
∂x0
∣∣∣∣ . (7)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
ε · exp(λ(x0)t) = |x(t , x0 + ε)− x(t , x0)|
λ(x0) = limt→∞
limε→0
1t
log∣∣∣∣x(t , x0 + ε)− x(t , x0)
ε
∣∣∣∣ (6)
Definition des Lyapunov-Exponenten (kont., 1-dim.)
λ(x0) = limt→∞
1t
log∣∣∣∣∂x(t , x0)
∂x0
∣∣∣∣ . (7)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
ε · exp(λ(x0)t) = |x(t , x0 + ε)− x(t , x0)|
λ(x0) = limt→∞
limε→0
1t
log∣∣∣∣x(t , x0 + ε)− x(t , x0)
ε
∣∣∣∣ (6)
Definition des Lyapunov-Exponenten (kont., 1-dim.)
λ(x0) = limt→∞
1t
log∣∣∣∣∂x(t , x0)
∂x0
∣∣∣∣ . (7)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
ε · exp(λ(x0)t) = |x(t , x0 + ε)− x(t , x0)|
λ(x0) = limt→∞
limε→0
1t
log∣∣∣∣x(t , x0 + ε)− x(t , x0)
ε
∣∣∣∣ (6)
Definition des Lyapunov-Exponenten (kont., 1-dim.)
λ(x0) = limt→∞
1t
log∣∣∣∣∂x(t , x0)
∂x0
∣∣∣∣ . (7)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Alternative Herleitung
y(t) = x(t) + ε(t)F (y(t)) = y(t) = x(t) + ε(t) = F (x(t) + ε(t))
Entwicklung bis zur ersten Ordnung in ε(t) liefert:
F (x(t) + ε(t)) ≈ F (x(t)) +∂F (x(t))
∂x(t)ε(t).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Alternative Herleitung
y(t) = x(t) + ε(t)F (y(t)) = y(t) = x(t) + ε(t) = F (x(t) + ε(t))
Entwicklung bis zur ersten Ordnung in ε(t) liefert:
F (x(t) + ε(t)) ≈ F (x(t)) +∂F (x(t))
∂x(t)ε(t).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Alternative Herleitung
y(t) = x(t) + ε(t)F (y(t)) = y(t) = x(t) + ε(t) = F (x(t) + ε(t))
Entwicklung bis zur ersten Ordnung in ε(t) liefert:
F (x(t) + ε(t)) ≈ F (x(t)) +∂F (x(t))
∂x(t)ε(t).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Alternative Herleitung
y(t) = x(t) + ε(t)
F (y(t)) = y(t) = x(t) + ε(t) = F (x(t)) +∂F (x(t))
∂x(t)ε(t)
Entwicklung bis zur ersten Ordnung in ε(t) liefert:
F (x(t) + ε(t)) ≈ F (x(t)) +∂F (x(t))
∂x(t)ε(t).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Alternative Herleitung
y(t) = x(t) + ε(t)
F (y(t)) = y(t) = F (x(t)) + ε(t) = F (x(t)) +∂F (x(t))
∂x(t)ε(t)
Entwicklung bis zur ersten Ordnung in ε(t) liefert:
F (x(t) + ε(t)) ≈ F (x(t)) +∂F (x(t))
∂x(t)ε(t).
Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (8)
mit der Lösungε(t) = Y (t) · ε0.
Eingesetzt in Formel (6) 2 ergibt sich
λ(x0) = limt→∞
limε0→0
1t
log∣∣∣∣ε(t)ε0
∣∣∣∣ .
Lyapunov-Exponent (kont., 1-dim.)
λ(x0) = limt→∞
1t
log |Y (t)| (9)
2
λ(x0) = limt→∞
limε0→0
1t
log˛x(t , x0 + ε0) − x(t , x0)
ε0
˛(6)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (8)
mit der Lösungε(t) = Y (t) · ε0.
Eingesetzt in Formel (6) 2 ergibt sich
λ(x0) = limt→∞
limε0→0
1t
log∣∣∣∣ε(t)ε0
∣∣∣∣ .
Lyapunov-Exponent (kont., 1-dim.)
λ(x0) = limt→∞
1t
log |Y (t)| (9)
2
λ(x0) = limt→∞
limε0→0
1t
log˛x(t , x0 + ε0) − x(t , x0)
ε0
˛(6)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (8)
mit der Lösungε(t) = Y (t) · ε0.
Eingesetzt in Formel (6) 2 ergibt sich
λ(x0) = limt→∞
limε0→0
1t
log∣∣∣∣ε(t)ε0
∣∣∣∣ .
Lyapunov-Exponent (kont., 1-dim.)
λ(x0) = limt→∞
1t
log |Y (t)| (9)
2
λ(x0) = limt→∞
limε0→0
1t
log˛x(t , x0 + ε0) − x(t , x0)
ε0
˛(6)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (8)
mit der Lösungε(t) = Y (t) · ε0.
Eingesetzt in Formel (6) 2 ergibt sich
λ(x0) = limt→∞
limε0→0
1t
log∣∣∣∣ε(t)ε0
∣∣∣∣ .
Lyapunov-Exponent (kont., 1-dim.)
λ(x0) = limt→∞
1t
log |Y (t)| (9)
2
λ(x0) = limt→∞
limε0→0
1t
log˛x(t , x0 + ε0) − x(t , x0)
ε0
˛(6)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (8)
mit der Lösungε(t) = Y (t) · ε0.
Eingesetzt in Formel (6) 2 ergibt sich
λ(x0) = limt→∞
limε0→0
1t
log∣∣∣∣ε(t)ε0
∣∣∣∣ .
Lyapunov-Exponent (kont., 1-dim.)
λ(x0) = limt→∞
1t
log |Y (t)| (9)
2
λ(x0) = limt→∞
limε0→0
1t
log˛x(t , x0 + ε0) − x(t , x0)
ε0
˛(6)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Lyapunov-Exponent für m-dim. kont. Systeme
Wähle zwei Trajektorien x(t) und y(t) = x(t) + ε(t).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (10)
mit der Lösungε(t) = Y (t) · ε0.
Y(t) heißt Matrixfundamentallösung.
Eine analoge Rechnung zum 1-dim. Fall führt zu den
Lyapunov-Exponenten (kont., m-dim.)
λ(x0)i = limt→∞
1t
log ‖Y(t) · ei‖. (11)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (10)
mit der Lösungε(t) = Y (t) · ε0.
Y(t) heißt Matrixfundamentallösung.
Eine analoge Rechnung zum 1-dim. Fall führt zu den
Lyapunov-Exponenten (kont., m-dim.)
λ(x0)i = limt→∞
1t
log ‖Y(t) · ei‖. (11)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Man erhält die Variationsgleichung
ε(t) =∂F (x(t))
∂x(t)ε(t) (10)
mit der Lösungε(t) = Y (t) · ε0.
Y(t) heißt Matrixfundamentallösung.
Eine analoge Rechnung zum 1-dim. Fall führt zu den
Lyapunov-Exponenten (kont., m-dim.)
λ(x0)i = limt→∞
1t
log ‖Y(t) · ei‖. (11)
Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Bedeutung des Lyapunov-Exponenten
Im m-dimensionalen Fall gibt es m Lyapunov-Exponenten.Diese werden der Größe nach geordnet:
λ1 ≥ λ2 ≥ · · · ≥ λm
λ = λ1 wird Lyapunov-Exponent des m-dim. dynamischenSystems genannt.Der Lyapunov-Exponent misst, wie sich zwei zumZeitpunkt t0 benachbarte Trajektorien exponentiellentfernen.
Damit gilt:λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Bedeutung des Lyapunov-Exponenten
Im m-dimensionalen Fall gibt es m Lyapunov-Exponenten.Diese werden der Größe nach geordnet:
λ1 ≥ λ2 ≥ · · · ≥ λm
λ = λ1 wird Lyapunov-Exponent des m-dim. dynamischenSystems genannt.Der Lyapunov-Exponent misst, wie sich zwei zumZeitpunkt t0 benachbarte Trajektorien exponentiellentfernen.
Damit gilt:λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Bedeutung des Lyapunov-Exponenten
Im m-dimensionalen Fall gibt es m Lyapunov-Exponenten.Diese werden der Größe nach geordnet:
λ1 ≥ λ2 ≥ · · · ≥ λm
λ = λ1 wird Lyapunov-Exponent des m-dim. dynamischenSystems genannt.Der Lyapunov-Exponent misst, wie sich zwei zumZeitpunkt t0 benachbarte Trajektorien exponentiellentfernen.
Damit gilt:λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Bedeutung des Lyapunov-Exponenten
Im m-dimensionalen Fall gibt es m Lyapunov-Exponenten.Diese werden der Größe nach geordnet:
λ1 ≥ λ2 ≥ · · · ≥ λm
λ = λ1 wird Lyapunov-Exponent des m-dim. dynamischenSystems genannt.Der Lyapunov-Exponent misst, wie sich zwei zumZeitpunkt t0 benachbarte Trajektorien exponentiellentfernen.
Damit gilt:λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Der gedämpfte harmonische Oszillator
Die Bewegungsgleichung ist gegeben durch
x + 2γx + ω2x = 0.
Das dynamische System lautet:
x = vv = −2γv − ω2x
F =
(v
−2γv − ω2x
)⇒ ∂F
∂x=
(0 1−ω2 −2γ
)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Der gedämpfte harmonische Oszillator
Die Bewegungsgleichung ist gegeben durch
x + 2γx + ω2x = 0.
Das dynamische System lautet:
x = vv = −2γv − ω2x
F =
(v
−2γv − ω2x
)⇒ ∂F
∂x=
(0 1−ω2 −2γ
)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Beispiel: Der gedämpfte harmonische Oszillator
Die Bewegungsgleichung ist gegeben durch
x + 2γx + ω2x = 0.
Das dynamische System lautet:
x = vv = −2γv − ω2x
F =
(v
−2γv − ω2x
)⇒ ∂F
∂x=
(0 1−ω2 −2γ
)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Damit lautet die Variationsgleichung
ε(t) =
(0 1−ω2 −2γ
)· ε0.
Da ∂F∂x hier zeitunahängig ist, lautet die Lösung der
Variationsgleichung
ε(t) = exp(
∂F∂x
· t)· ε0.
Die Matrixfundamentallösung Y(t) ist also gegeben durch
Y(t) = exp(
∂F∂x
· t)
= exp((
0 1−ω2 −2γ
)· t
).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Damit lautet die Variationsgleichung
ε(t) =
(0 1−ω2 −2γ
)· ε0.
Da ∂F∂x hier zeitunahängig ist, lautet die Lösung der
Variationsgleichung
ε(t) = exp(
∂F∂x
· t)· ε0.
Die Matrixfundamentallösung Y(t) ist also gegeben durch
Y(t) = exp(
∂F∂x
· t)
= exp((
0 1−ω2 −2γ
)· t
).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Damit lautet die Variationsgleichung
ε(t) =
(0 1−ω2 −2γ
)· ε0.
Da ∂F∂x hier zeitunahängig ist, lautet die Lösung der
Variationsgleichung
ε(t) = exp(
∂F∂x
· t)· ε0.
Die Matrixfundamentallösung Y(t) ist also gegeben durch
Y(t) = exp(
∂F∂x
· t)
= exp((
0 1−ω2 −2γ
)· t
).

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Die Lyapunov-Exponenten berechnen sich dann mit Hilfe vonFormel (11). 3
Man erhält für die Lyapunov-Exponenten in Abhängigkeit vonder Dämpfung:
γ = 0 λ1,2 = 0
γ2 ≤ ω2 λ1,2 = −γ
λ1 = −γ +√
γ2 − ω2γ2 > ω2
λ2 = −γ −√
γ2 − ω2
3
λ(x0)i = limt→∞
1t
log ‖Y(t) · ei‖ (11)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Die Lyapunov-Exponenten berechnen sich dann mit Hilfe vonFormel (11). 3
Man erhält für die Lyapunov-Exponenten in Abhängigkeit vonder Dämpfung:
γ = 0 λ1,2 = 0
γ2 ≤ ω2 λ1,2 = −γ
λ1 = −γ +√
γ2 − ω2γ2 > ω2
λ2 = −γ −√
γ2 − ω2
3
λ(x0)i = limt→∞
1t
log ‖Y(t) · ei‖ (11)

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Der Lyapunov-Exponent ist immer negativ. Damit ist dasSystem stabil.
Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Zusammenfassung und Ausblick
Der Lyapunov-Exponent gibt Auskunft über die Stabilitätvon Trajektorien im Phasenraum.λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.
Es gibt weitere mathematische Begriffe um (In-)Stabilitätzu charakterisieren, z.B. Hausdorff-Dimension,topologische Entropie, . . .
Die Berechnung der Lyapunov-Exponenten ist nur inwenigen Fällen analytisch möglich. Es gibt jedoch eineVielzahl von numerischen Verfahren.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Zusammenfassung und Ausblick
Der Lyapunov-Exponent gibt Auskunft über die Stabilitätvon Trajektorien im Phasenraum.λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.
Es gibt weitere mathematische Begriffe um (In-)Stabilitätzu charakterisieren, z.B. Hausdorff-Dimension,topologische Entropie, . . .
Die Berechnung der Lyapunov-Exponenten ist nur inwenigen Fällen analytisch möglich. Es gibt jedoch eineVielzahl von numerischen Verfahren.

Einführung Diskrete dynamische Systeme Kontinuierliche dynamische Systeme Zusammenfassung
Zusammenfassung und Ausblick
Der Lyapunov-Exponent gibt Auskunft über die Stabilitätvon Trajektorien im Phasenraum.λ < 0 : Trajektorie ist asymtotisch stabil.λ = 0 : Trajektorie ist Lyapunov-stabil.λ > 0 : Trajektorie ist instabil.
Es gibt weitere mathematische Begriffe um (In-)Stabilitätzu charakterisieren, z.B. Hausdorff-Dimension,topologische Entropie, . . .
Die Berechnung der Lyapunov-Exponenten ist nur inwenigen Fällen analytisch möglich. Es gibt jedoch eineVielzahl von numerischen Verfahren.





























