Embed Size (px)
Citation preview

Abstract— In this paper, we present an adhesion mechanism
that can be used for underwater climbing robots and
manipulators. The proposed design is inspired from tube feet of
sea urchins, which use a combination of suction by extra soft
sucker pads with assist of chemical adhesive materials. An
experimental analysis of the bioinspired adhesive suckers (in
single and array fashion) was performed and the obtained
results show a repeatable increase in generated forces by single
soft suckers, as compared with commercial sucker clamps. The
main advantage of this sucker is its capability of adapting to the
rough surfaces and to perform attachment. The other features
of the sucker are its simple design, ease of manufacturing, and
the capability of miniaturization for miniature robotic
applications.
I. INTRODUCTION
NDERWATER biological adhesion mechanisms are
strong sources of inspiration for robotic researchers for
the development of innovative underwater robots and
manipulators. When endowing robots with adhesion
capability, they can be able to climb surfaces, grasp and
manipulate objects, and in swimming robots that need to
stay in a fixed position for a special task, adhesion helps
them to withstand the underwater hydrodynamic forces.
Several investigations were addressed in order to understand
underwater adhesion principles and also, in order to apply
them in robotics. Anatomical studies and 3D reconstruction
of octopus suckers [2] were recently addressed in order to
understand their adhesion strategy, while simulation of
octopus suckers were reported [1]. Moreover, a climbing
robot based on sucker principle by using SMA actuators was
reported [3]. Bellows-type sucker was also studied for
underwater application based on bio-inspired principles [4].
There are different techniques used by marine animals.
The well-known techniques can be classified in three groups.
First, suction based adhesions like octopus[5] or leech [6];
second, adhesion based on chemical adhesive, like
mussels[7]; and, third combination of chemical adhesives
and suction like limpets [8],[9].
Sea urchins (Fig. 1, left) are a wonderful group of marine
animals, that can, temporarily, attach to a wide range of
substrates, move, and manipulate food, by using numbers of
Manuscript received January 31, 2012.
A. Sadeghi is with The BioRobotics Institute, Scuola Superiore Sant’Anna,
Pisa, Italy and with the Center for Micro-BioRobotics@SSSA, Istituto
Italiano di Tecnologia, Pontedera, Italy (corresponding author: phone:
0039-050-883493; fax: 0039-050-883101; e-mail: [email protected]).
L. Beccai (e-mail: [email protected]) and B. Mazzolai (e-mail:
[email protected]) are with the Center for Micro-
BioRobotics@SSSA, Istituto Italiano di Tecnologia, Pontedera, Italy.
external, extra soft elements (Fig. 1, right), which are called
tube feet [10]. These small, spiny and spherical shape marine
animals which belong to the Echinoderms (Phylum
Echinodermata) inhabit the ocean at all depths. Their
adhesive tube feet allow sea urchins to anchor to sea
substrates resisting to hydrodynamic generated forces, which
are produced by ocean strong waves [10]. The attachment
strengths for a special kind of sea urchins are reported
between 23.4 (±2.0) N and 46.3 (± 2.4) N as function of
their body size [11]. Moreover, in [10] the attachment
strength of sea urchins is reported as up to 100N. Based on
the external morphology of tube feet, they are classified into
six types: disc-ending, penicillate, knob-ending, lamellate,
digitate, and ramified [10]. Methods of attachment and
detachment in disc-ending tube feet have been studied by
several groups and two main different models were
proposed. One model explains the mechanism of both
attachment and detachment based on the chemical reaction
of secretions injected by tube feet on the substratum. This
theory focuses on mucus glands and structure of foot print
[12], [13]. The adhesive material works like twin glues and
adhesion is produced by a combination of due gland
adhesives [10], [12]. Instead, detachment happens by adding
a de-adhesive secretion to the surface [10], [12], [14]. The
second model is based on negative pressure, and assisted by
mucus secretion, and is explained in detail in the next
section [15],[16],[17].
In this work, we have considered the intriguing adhesion
techniques of tube feet, specifically of the disc-ending type,
as a source of inspiration to design and develop innovative
adhesion mechanisms for underwater robotic application. In
particular, we report on the design and development of a
simple active sucker that produces negative pressure inspired
by tube feet. We focused attention on the role of soft
materials and artificial mucus necessary to produce the
required force for sucker adhesion. Our final goal is to
implement a group of suckers which work better than
Design and Development of Innovative Adhesive Suckers Inspired
by the Tube Feet of Sea Urchins
A. Sadeghi, L. Beccai, Member, IEEE, B. Mazzolai, Member, IEEE
U
Fig. 1 Left, sea urchin is climbing aquarium wall; right, adhesive or disc
ended tube feet.
The Fourth IEEE RAS/EMBS International Conferenceon Biomedical Robotics and BiomechatronicsRoma, Italy. June 24-27, 2012
978-1-4577-1198-5/12/$26.00 ©2012 IEEE 617
existing suckers in terms of behavior on rough and cracked
surfaces.
II. BIO-INSPIRATION AND DESIGN
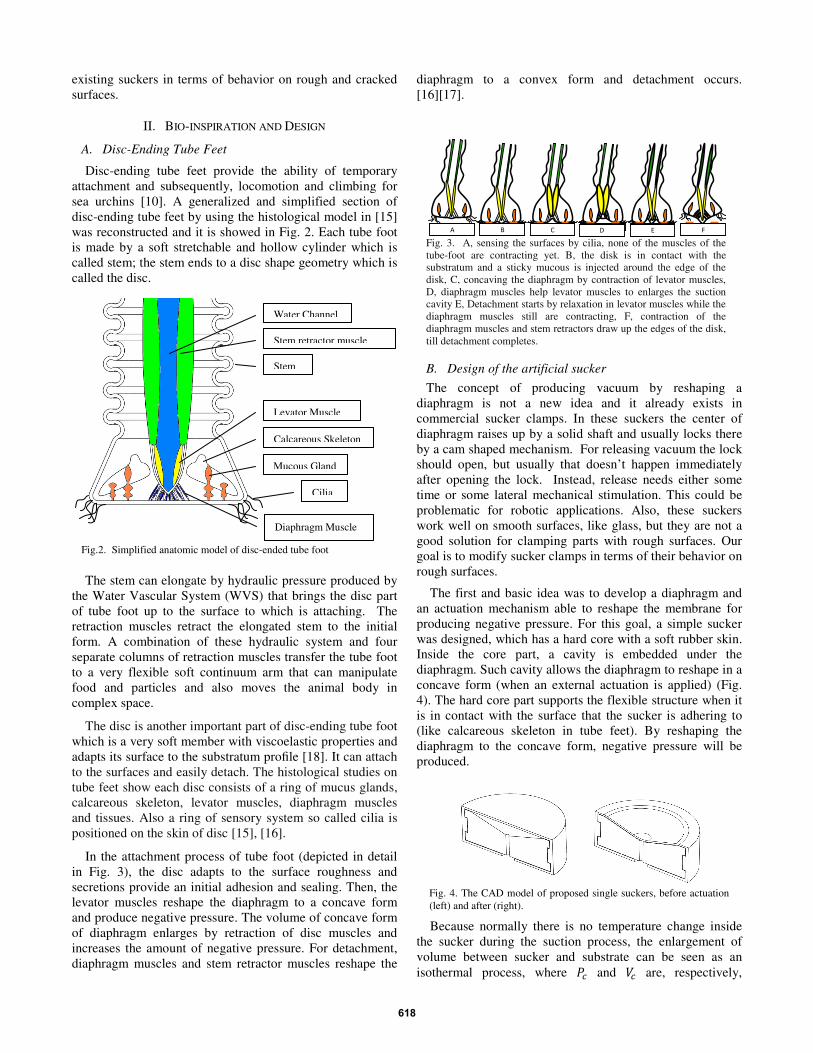
A. Disc-Ending Tube Feet
Disc-ending tube feet provide the ability of temporary
attachment and subsequently, locomotion and climbing for
sea urchins [10]. A generalized and simplified section of
disc-ending tube feet by using the histological model in [15]
was reconstructed and it is showed in Fig. 2. Each tube foot
is made by a soft stretchable and hollow cylinder which is
called stem; the stem ends to a disc shape geometry which is
called the disc.
The stem can elongate by hydraulic pressure produced by
the Water Vascular System (WVS) that brings the disc part
of tube foot up to the surface to which is attaching. The
retraction muscles retract the elongated stem to the initial
form. A combination of these hydraulic system and four
separate columns of retraction muscles transfer the tube foot
to a very flexible soft continuum arm that can manipulate
food and particles and also moves the animal body in
complex space.
The disc is another important part of disc-ending tube foot
which is a very soft member with viscoelastic properties and
adapts its surface to the substratum profile [18]. It can attach
to the surfaces and easily detach. The histological studies on
tube feet show each disc consists of a ring of mucus glands,
calcareous skeleton, levator muscles, diaphragm muscles
and tissues. Also a ring of sensory system so called cilia is
positioned on the skin of disc [15], [16].
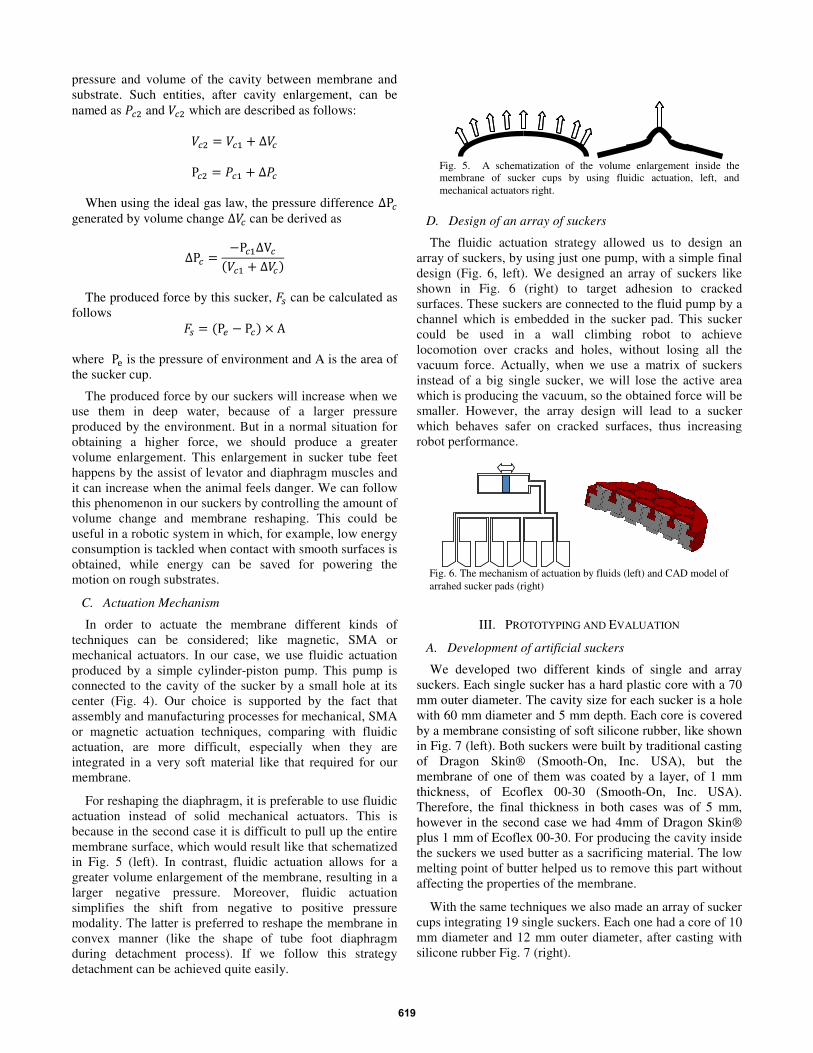
In the attachment process of tube foot (depicted in detail
in Fig. 3), the disc adapts to the surface roughness and
secretions provide an initial adhesion and sealing. Then, the
levator muscles reshape the diaphragm to a concave form
and produce negative pressure. The volume of concave form
of diaphragm enlarges by retraction of disc muscles and
increases the amount of negative pressure. For detachment,
diaphragm muscles and stem retractor muscles reshape the
diaphragm to a convex form and detachment occurs.
[16][17].
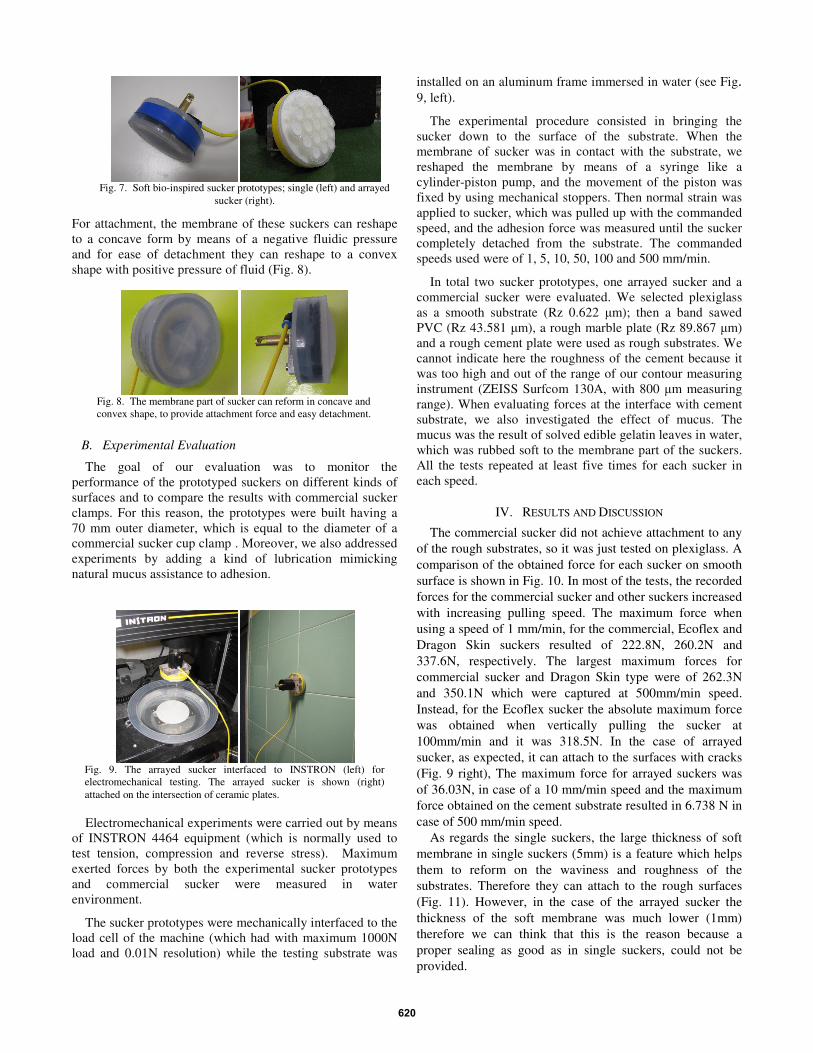
B. Design of the artificial sucker
The concept of producing vacuum by reshaping a
diaphragm is not a new idea and it already exists in
commercial sucker clamps. In these suckers the center of
diaphragm raises up by a solid shaft and usually locks there
by a cam shaped mechanism. For releasing vacuum the lock
should open, but usually that doesn’t happen immediately
after opening the lock. Instead, release needs either some
time or some lateral mechanical stimulation. This could be
problematic for robotic applications. Also, these suckers
work well on smooth surfaces, like glass, but they are not a
good solution for clamping parts with rough surfaces. Our
goal is to modify sucker clamps in terms of their behavior on
rough surfaces.
The first and basic idea was to develop a diaphragm and
an actuation mechanism able to reshape the membrane for
producing negative pressure. For this goal, a simple sucker
was designed, which has a hard core with a soft rubber skin.
Inside the core part, a cavity is embedded under the
diaphragm. Such cavity allows the diaphragm to reshape in a
concave form (when an external actuation is applied) (Fig.
4). The hard core part supports the flexible structure when it
is in contact with the surface that the sucker is adhering to
(like calcareous skeleton in tube feet). By reshaping the
diaphragm to the concave form, negative pressure will be
produced.
Because normally there is no temperature change inside
the sucker during the suction process, the enlargement of
volume between sucker and substrate can be seen as an
isothermal process, where �� and �� are, respectively,
Fig. 4. The CAD model of proposed single suckers, before actuation
(left) and after (right).
Fig. 3. A, sensing the surfaces by cilia, none of the muscles of the
tube-foot are contracting yet. B, the disk is in contact with the
substratum and a sticky mucous is injected around the edge of the
disk, C, concaving the diaphragm by contraction of levator muscles,
D, diaphragm muscles help levator muscles to enlarges the suction
cavity E, Detachment starts by relaxation in levator muscles while the
diaphragm muscles still are contracting, F, contraction of the
diaphragm muscles and stem retractors draw up the edges of the disk,
till detachment completes.
A B C E F D
Fig.2. Simplified anatomic model of disc-ended tube foot
Diaphragm Muscle
Water Channel
Stem retractor muscle
Levator Muscle
Mucous Gland
Cilia
Stem
Calcareous Skeleton
618
pressure and volume of the cavity between membrane and
substrate. Such entities, after cavity enlargement, can be
named as ��� and ��� which are described as follows:
��� � ��� � ∆��
P�� � ��� � ∆��
When using the ideal gas law, the pressure difference ∆P�
generated by volume change ∆�� can be derived as
∆P� �P��∆V�
���� � ∆��
The produced force by this sucker, �� can be calculated as
follows
�� � �P� P� � A
where P� is the pressure of environment and A is the area of
the sucker cup.
The produced force by our suckers will increase when we
use them in deep water, because of a larger pressure
produced by the environment. But in a normal situation for
obtaining a higher force, we should produce a greater
volume enlargement. This enlargement in sucker tube feet
happens by the assist of levator and diaphragm muscles and
it can increase when the animal feels danger. We can follow
this phenomenon in our suckers by controlling the amount of
volume change and membrane reshaping. This could be
useful in a robotic system in which, for example, low energy
consumption is tackled when contact with smooth surfaces is
obtained, while energy can be saved for powering the
motion on rough substrates.
C. Actuation Mechanism
In order to actuate the membrane different kinds of
techniques can be considered; like magnetic, SMA or
mechanical actuators. In our case, we use fluidic actuation
produced by a simple cylinder-piston pump. This pump is
connected to the cavity of the sucker by a small hole at its
center (Fig. 4). Our choice is supported by the fact that
assembly and manufacturing processes for mechanical, SMA
or magnetic actuation techniques, comparing with fluidic
actuation, are more difficult, especially when they are
integrated in a very soft material like that required for our
membrane.
For reshaping the diaphragm, it is preferable to use fluidic
actuation instead of solid mechanical actuators. This is
because in the second case it is difficult to pull up the entire
membrane surface, which would result like that schematized
in Fig. 5 (left). In contrast, fluidic actuation allows for a
greater volume enlargement of the membrane, resulting in a
larger negative pressure. Moreover, fluidic actuation
simplifies the shift from negative to positive pressure
modality. The latter is preferred to reshape the membrane in
convex manner (like the shape of tube foot diaphragm
during detachment process). If we follow this strategy
detachment can be achieved quite easily.
D. Design of an array of suckers
The fluidic actuation strategy allowed us to design an
array of suckers, by using just one pump, with a simple final
design (Fig. 6, left). We designed an array of suckers like
shown in Fig. 6 (right) to target adhesion to cracked
surfaces. These suckers are connected to the fluid pump by a
channel which is embedded in the sucker pad. This sucker
could be used in a wall climbing robot to achieve
locomotion over cracks and holes, without losing all the
vacuum force. Actually, when we use a matrix of suckers
instead of a big single sucker, we will lose the active area
which is producing the vacuum, so the obtained force will be
smaller. However, the array design will lead to a sucker
which behaves safer on cracked surfaces, thus increasing
robot performance.
III. PROTOTYPING AND EVALUATION
A. Development of artificial suckers
We developed two different kinds of single and array
suckers. Each single sucker has a hard plastic core with a 70
mm outer diameter. The cavity size for each sucker is a hole
with 60 mm diameter and 5 mm depth. Each core is covered
by a membrane consisting of soft silicone rubber, like shown
in Fig. 7 (left). Both suckers were built by traditional casting
of Dragon Skin® (Smooth-On, Inc. USA), but the
membrane of one of them was coated by a layer, of 1 mm
thickness, of Ecoflex 00-30 (Smooth-On, Inc. USA).
Therefore, the final thickness in both cases was of 5 mm,
however in the second case we had 4mm of Dragon Skin®
plus 1 mm of Ecoflex 00-30. For producing the cavity inside
the suckers we used butter as a sacrificing material. The low
melting point of butter helped us to remove this part without
affecting the properties of the membrane.
With the same techniques we also made an array of sucker
cups integrating 19 single suckers. Each one had a core of 10
mm diameter and 12 mm outer diameter, after casting with
silicone rubber Fig. 7 (right).
Fig. 6. The mechanism of actuation by fluids (left) and CAD model of
arrahed sucker pads (right)
Fig. 5. A schematization of the volume enlargement inside the
membrane of sucker cups by using fluidic actuation, left, and
mechanical actuators right.
619
For attachment, the membrane of these suckers can reshape
to a concave form by means of a negative fluidic pressure
and for ease of detachment they can reshape to a convex
shape with positive pressure of fluid (Fig. 8).
B. Experimental Evaluation
The goal of our evaluation was to monitor the
performance of the prototyped suckers on different kinds of
surfaces and to compare the results with commercial sucker
clamps. For this reason, the prototypes were built having a
70 mm outer diameter, which is equal to the diameter of a
commercial sucker cup clamp . Moreover, we also addressed
experiments by adding a kind of lubrication mimicking
natural mucus assistance to adhesion.
Electromechanical experiments were carried out by means
of INSTRON 4464 equipment (which is normally used to
test tension, compression and reverse stress). Maximum
exerted forces by both the experimental sucker prototypes
and commercial sucker were measured in water
environment.
The sucker prototypes were mechanically interfaced to the
load cell of the machine (which had with maximum 1000N
load and 0.01N resolution) while the testing substrate was
installed on an aluminum frame immersed in water (see Fig. 9, left).
The experimental procedure consisted in bringing the
sucker down to the surface of the substrate. When the
membrane of sucker was in contact with the substrate, we
reshaped the membrane by means of a syringe like a
cylinder-piston pump, and the movement of the piston was
fixed by using mechanical stoppers. Then normal strain was
applied to sucker, which was pulled up with the commanded
speed, and the adhesion force was measured until the sucker
completely detached from the substrate. The commanded
speeds used were of 1, 5, 10, 50, 100 and 500 mm/min.
In total two sucker prototypes, one arrayed sucker and a
commercial sucker were evaluated. We selected plexiglass
as a smooth substrate (Rz 0.622 µm); then a band sawed
PVC (Rz 43.581 µm), a rough marble plate (Rz 89.867 µm)
and a rough cement plate were used as rough substrates. We
cannot indicate here the roughness of the cement because it
was too high and out of the range of our contour measuring
instrument (ZEISS Surfcom 130A, with 800 µm measuring
range). When evaluating forces at the interface with cement
substrate, we also investigated the effect of mucus. The
mucus was the result of solved edible gelatin leaves in water,
which was rubbed soft to the membrane part of the suckers.
All the tests repeated at least five times for each sucker in
each speed.
IV. RESULTS AND DISCUSSION
The commercial sucker did not achieve attachment to any
of the rough substrates, so it was just tested on plexiglass. A
comparison of the obtained force for each sucker on smooth
surface is shown in Fig. 10. In most of the tests, the recorded
forces for the commercial sucker and other suckers increased
with increasing pulling speed. The maximum force when
using a speed of 1 mm/min, for the commercial, Ecoflex and
Dragon Skin suckers resulted of 222.8N, 260.2N and
337.6N, respectively. The largest maximum forces for
commercial sucker and Dragon Skin type were of 262.3N
and 350.1N which were captured at 500mm/min speed.
Instead, for the Ecoflex sucker the absolute maximum force
was obtained when vertically pulling the sucker at
100mm/min and it was 318.5N. In the case of arrayed
sucker, as expected, it can attach to the surfaces with cracks
(Fig. 9 right), The maximum force for arrayed suckers was
of 36.03N, in case of a 10 mm/min speed and the maximum
force obtained on the cement substrate resulted in 6.738 N in
case of 500 mm/min speed.
As regards the single suckers, the large thickness of soft
membrane in single suckers (5mm) is a feature which helps
them to reform on the waviness and roughness of the
substrates. Therefore they can attach to the rough surfaces
(Fig. 11). However, in the case of the arrayed sucker the
thickness of the soft membrane was much lower (1mm)
therefore we can think that this is the reason because a
proper sealing as good as in single suckers, could not be
provided.
Fig. 9. The arrayed sucker interfaced to INSTRON (left) for
electromechanical testing. The arrayed sucker is shown (right)
attached on the intersection of ceramic plates.
Fig. 8. The membrane part of sucker can reform in concave and
convex shape, to provide attachment force and easy detachment.
Fig. 7. Soft bio-inspired sucker prototypes; single (left) and arrayed
sucker (right).
620
These results show how the single soft suckers had a
better performance than commercial suckers. In addition to
the bioinspired design, the main reason is that the amount of
volume change created by the fluidic actuation in the single
soft sucker prototypes, as previously explained (see Fig. 5),
is larger than the one created in commercial sucker when
performing adhesion. Therefore, the generated forces are
higher.
The results of tests on band-sawed substrate (with an
oriented roughness), marble and cement, respectively are
shown in Fig. 12, 13 and 14. As it could be expected, the
charts show that, soft suckers can produce negative pressure
and attachment force on rough surfaces. This capability is
provided, because the soft materials can adapt to the
roughness of substrate and decrease the speed of leakage of
water to the vacuum chamber. In particular, Fig. 14 shows
how, when mucus is used on top of the cement substrates,
the soft sucker prototypes (disregarding of the soft material
they are made of) implement higher adhesion forces.
During the tests of the Dragon Skin sucker, for all the
speeds except for 500 mm/min, the process of detachment
started with a slipping, from the peripheral region towards
the center. On a first analysis, one could thing that this
process could have unexpected effects depending on the
frictional characteristics of the sucker/substrate interface.
Instead, at 500mm/min speed, the detachment process
occurred suddenly by making a kind of explosion sound.
This same phenomenon was obtained also for the Ecoflex
sucker at all the speeds, and also for Dragon Skin as well,
after adding gelatin mucus to the attachment process. This
shows that the membrane in the Ecoflex type sucker (which
is more flexible than the Dragon Skin one), adapts better on
the substrate roughness and with the assist of gelatin mucus
provides a better sealing.
V. CONCLUSION
The process of attachment and detachment in adhesive
tube feet in sea urchins was investigated. Taking inspiration
from such natural mechanism, the concept of increasing the
softness of sucker pads and adding a thin layer of mucus
between sucker membrane and substrate for obtaining
stronger attachment, was proposed, implemented and tested.
The obtained results showed a repeatable increase in
generated forces by single soft suckers, as compared with
commercial sucker clamps. By adding mucus to the
0
50
100
150
200
250
300
350
1 5 10 50 100 500
Forc
e[N
]
Speed mm/min
Cement-Ecoflex
Cement-
Ecoflex+Mucus
Cement-Dragon
Cement-
Dragon+mucus
Fig 14. Results of pulling force of soft sucker prototypes interfaced to
cement substrate alone, and with artificial mucus on top.
0
50
100
150
200
250
300
350
400
1 5 10 50 100 500
Fo
rce
[N
]
Speed [mm/min]
Dragon Skin
Ecoflex
Fig. 13. The average values of maximum forces in each speed for
Dragon Skin and Ecoflex suckers on marble substrate
0
50
100
150
200
250
300
350
400
1 5 10 50 100 500
Fo
rce
[N]
speed[mm/min]
Dragon skin
Ecoflex
Fig. 12. The average values of maximum forces in each speed for
Dragon Skin and Ecoflex suckers on band sawed plastic substrate
Fig. 11. Sucker cup shown when lifting a rough brick.
0
100
200
300
400
1 5 10 50 100 500
Forc
e[N
]
Speed [mm/min]
Comercial Dragon Skin Ecoflex
Fig. 10. Results of pulling force of suckers interfaced to smooth
plexiglass as substrate.
621
attachment process the obtained forces were the following.
As regards the Dragon Skin sucker type, the forces increased
from 6.6% (for a 500mm/min pulling speed) to 66.38% (for
a 1 mm/min pulling speed). As regards the Ecoflex sucker
type, the forces increased from 29.2% (for a 500mm/min
speed) to a 232% (for a 1mm/min speed). The proposed
sucker is simple for final design and manufacturing process
and it can be miniaturized. This potentiality is shown, for
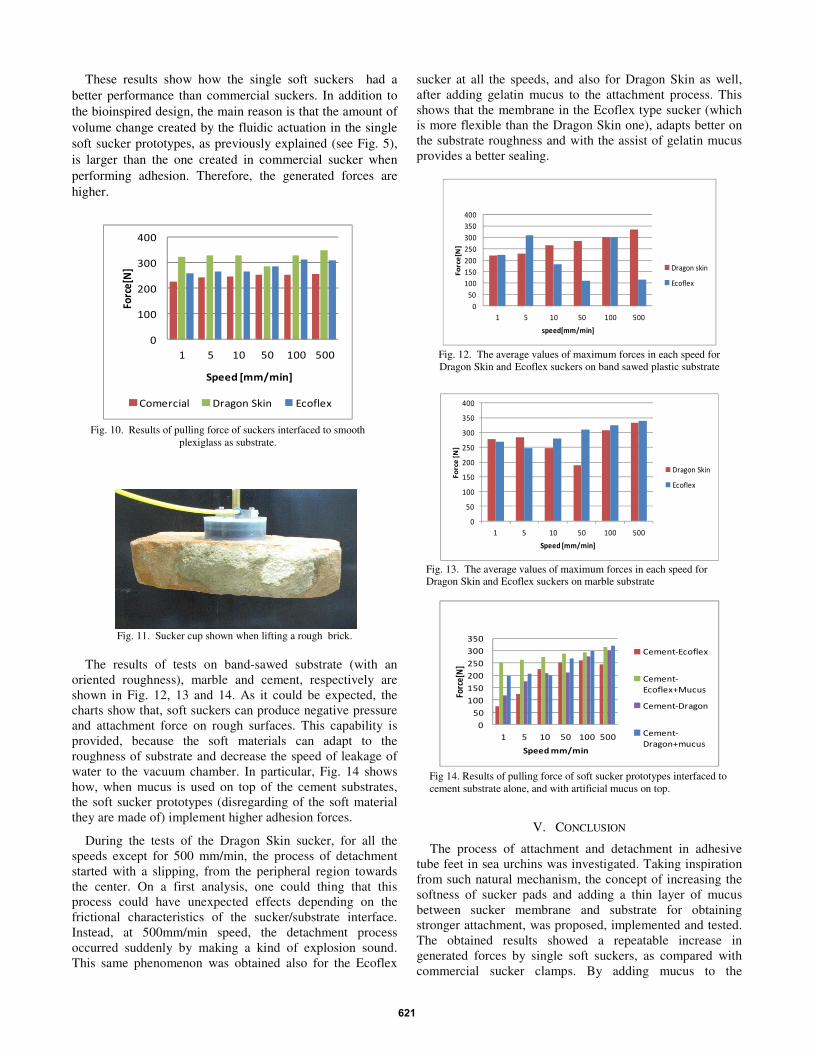
example, in Fig. 15. Here we depict a miniature arrayed
sucker system, embodying the proposed bio-inspired sucker
mechanism, with suckers having millimetric diameter.
As future work, we plan to increase the flexibility of
whole the body in arrayed suckers, in order to increase the
ability of matching with waviness and roughness in the
substrates. Also a mechanism for controlled dispensing of
the secretion will be designed and integrated in the sucker
system. We also plan to investigate the application of this
adhesion and detachment mechanism when integrated in soft
continuum arms. Such potential application is shown by the
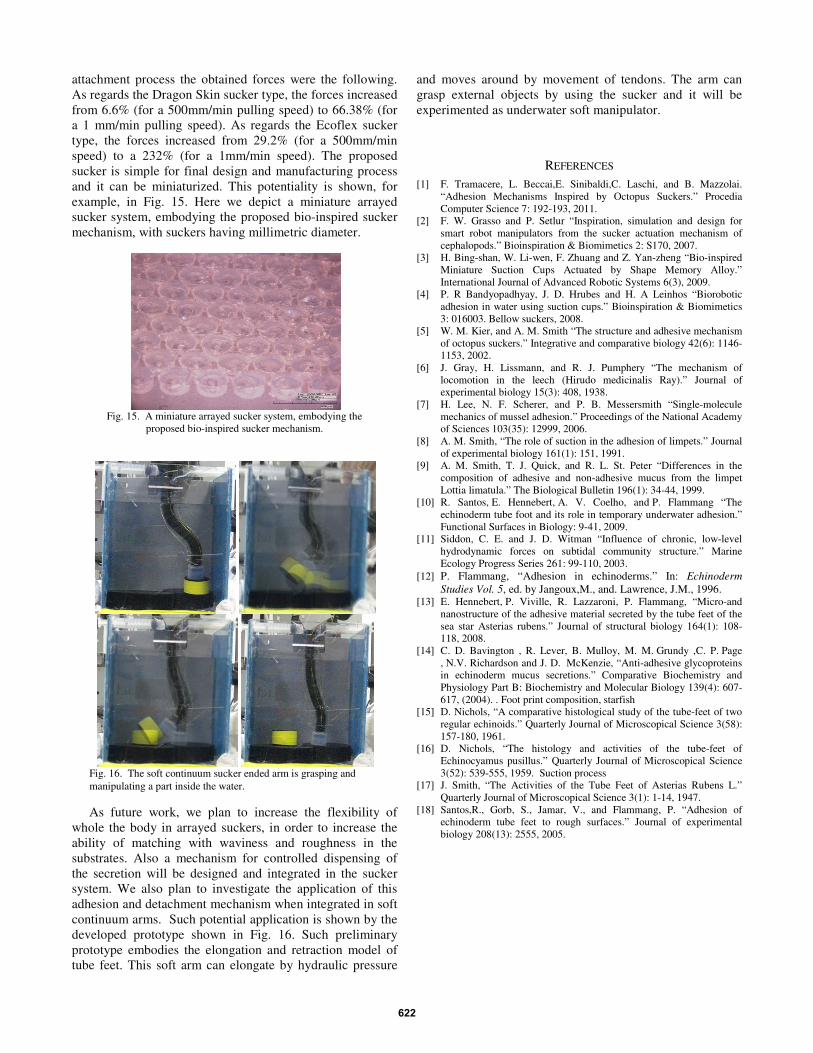
developed prototype shown in Fig. 16. Such preliminary
prototype embodies the elongation and retraction model of
tube feet. This soft arm can elongate by hydraulic pressure
and moves around by movement of tendons. The arm can
grasp external objects by using the sucker and it will be
experimented as underwater soft manipulator.
REFERENCES
[1] F. Tramacere, L. Beccai,E. Sinibaldi,C. Laschi, and B. Mazzolai.
“Adhesion Mechanisms Inspired by Octopus Suckers.” Procedia
Computer Science 7: 192-193, 2011.
[2] F. W. Grasso and P. Setlur “Inspiration, simulation and design for
smart robot manipulators from the sucker actuation mechanism of
cephalopods.” Bioinspiration & Biomimetics 2: S170, 2007.
[3] H. Bing-shan, W. Li-wen, F. Zhuang and Z. Yan-zheng “Bio-inspired
Miniature Suction Cups Actuated by Shape Memory Alloy.”
International Journal of Advanced Robotic Systems 6(3), 2009.
[4] P. R Bandyopadhyay, J. D. Hrubes and H. A Leinhos “Biorobotic
adhesion in water using suction cups.” Bioinspiration & Biomimetics
3: 016003. Bellow suckers, 2008.
[5] W. M. Kier, and A. M. Smith “The structure and adhesive mechanism
of octopus suckers.” Integrative and comparative biology 42(6): 1146-
1153, 2002.
[6] J. Gray, H. Lissmann, and R. J. Pumphery “The mechanism of
locomotion in the leech (Hirudo medicinalis Ray).” Journal of
experimental biology 15(3): 408, 1938.
[7] H. Lee, N. F. Scherer, and P. B. Messersmith “Single-molecule
mechanics of mussel adhesion.” Proceedings of the National Academy
of Sciences 103(35): 12999, 2006.
[8] A. M. Smith, “The role of suction in the adhesion of limpets.” Journal
of experimental biology 161(1): 151, 1991.
[9] A. M. Smith, T. J. Quick, and R. L. St. Peter “Differences in the
composition of adhesive and non-adhesive mucus from the limpet
Lottia limatula.” The Biological Bulletin 196(1): 34-44, 1999.
[10] R. Santos, E. Hennebert, A. V. Coelho, and P. Flammang “The
echinoderm tube foot and its role in temporary underwater adhesion.”
Functional Surfaces in Biology: 9-41, 2009.
[11] Siddon, C. E. and J. D. Witman “Influence of chronic, low-level
hydrodynamic forces on subtidal community structure.” Marine
Ecology Progress Series 261: 99-110, 2003.
[12] P. Flammang, “Adhesion in echinoderms.” In: Echinoderm
Studies Vol. 5, ed. by Jangoux,M., and. Lawrence, J.M., 1996. [13] E. Hennebert, P. Viville, R. Lazzaroni, P. Flammang, “Micro-and
nanostructure of the adhesive material secreted by the tube feet of the
sea star Asterias rubens.” Journal of structural biology 164(1): 108-
118, 2008.
[14] C. D. Bavington , R. Lever, B. Mulloy, M. M. Grundy ,C. P. Page
, N.V. Richardson and J. D. McKenzie, “Anti-adhesive glycoproteins
in echinoderm mucus secretions.” Comparative Biochemistry and
Physiology Part B: Biochemistry and Molecular Biology 139(4): 607-
617, (2004). . Foot print composition, starfish
[15] D. Nichols, “A comparative histological study of the tube-feet of two
regular echinoids.” Quarterly Journal of Microscopical Science 3(58):
157-180, 1961.
[16] D. Nichols, “The histology and activities of the tube-feet of
Echinocyamus pusillus.” Quarterly Journal of Microscopical Science
3(52): 539-555, 1959. Suction process
[17] J. Smith, “The Activities of the Tube Feet of Asterias Rubens L.”
Quarterly Journal of Microscopical Science 3(1): 1-14, 1947.
[18] Santos,R., Gorb, S., Jamar, V., and Flammang, P. “Adhesion of
echinoderm tube feet to rough surfaces.” Journal of experimental
biology 208(13): 2555, 2005.
Fig. 16. The soft continuum sucker ended arm is grasping and
manipulating a part inside the water.
Fig. 15. A miniature arrayed sucker system, embodying the
proposed bio-inspired sucker mechanism.
622