Embed Size (px)
Citation preview

Nuclear Instruments and Methods 205 (1983) 511-516 511 North-Holland Publishing Company
D E S I G N A N D I M P L E M E N T A T I O N O F A S I M P L E N U C L E A R P O W E R P L A N T S I M U L A T O R
W i l l i a m H. M I L L E R
Associate Professor, Nuclear Engineering, 1026 Engineering, University of Missouri, Columbia, MO 65211, U.S.A.
Received 12 January 1982 and in revised form 2 June 1982
A simple PWR nuclear power plant simulator has been designed and implemented on a minicomputer system. The system is intended for students use in understanding the power operation of a nuclear power plant. A PDP- 11 minicomputer calculates reactor parameters in real time, uses a graphics terminal to display the results and a keyboard and joystick for control functions. Plant parameters calculated by the model include the core reactivity (based upon control rod positions, soluble boron concentration and reactivity feedback effects), the total core power, the axial core power distribution, the temperature and pressure in the primary and secondary coolant loops, etc.
1. Introduction
With the increased emphasis currently being placed on operator t raining in the nuclear power industry, nuclear power p lant simulators are receiving a great deal of a t tent ion. Recently, Combus t ion Engineering [1] has developed a " C o m p a c t Low Cost Nuclear Simula- tor" which utilizes a CRT, a micro-processor and a te lephone link to a large computer facility. Al though this system is relatively simple in concept (i.e. the use of a keyboard for control and a C R T for display) the model is much more involved than is necessary for classroom use. The development of a relatively simple mathemat ica l model which could be executed in a small compute r interfaced to a video-graphics terminal would be useful for educat ing students. Such a system has been designed as a class project in NE-365, Nuclear Power Engineering, at the Universi ty of Missouri, Col- umbia.
2. Methodology
Simulator designs always require trade-offs between the accuracy of the model and t ime l imitat ions for real t ime operation. This is part icularly true for this project where a relatively slow min icomputer is being used for all calculations. It was initially assumed that a t ime step interval of approximately 15 seconds for calculat ing new plant parameters would give the "ope ra to r " rela- tively cont inuous informat ion on the plant, would ap- proximately simulate the t ranspor t delay associated with P W R systems and would still provide sufficient com- puter time for calculations. The following assumpt ions and equations were developed to meet this t iming criteria.
0 1 6 7 - 5 0 8 7 / 8 3 / 0 0 0 0 - 0 0 0 0 / $ 0 3 . 0 0 © 1983 Nor th -Hol l and
A modified point kinetics equat ion is used to calcu- late the neut ron density (assumed to be propor t ional to core power) as a funct ion of core reactivity and time:
[ fl-p(ti-')fl--~i {)~p(t~)At)lfl_p(t~) n ( t , ) = n ( , , ,) exp l , (1)
where
n(l i_ 1 ) = neut ron density from the previous time step, n(t~) = new neu t ron density, At = time step interval,
fl, ;k = one delayed group neut ron fract ion and decay constant , p(ti-1) = reactivity for the previous t ime step,
P(t i) = reactivity for the new time step. No te that the second term of the usual point kinetics reactivity equat ion is not used since At is large and the first term is modified to account for sequential step reactivity changes. The core reactivity is calculated from simple, first order derivatives from a reference condi t ion at the middle of an equil ibrium cycle at 100% power:
P = Apb . . . . ( n r e f -- B ) + A p p . . . . ( q r e f - q¢)
4
-[-Aptemp(Tre f - Tp) -]- E Apc G ' i=1
where Apb ...... App . . . . .
Aptemp
Bref, qref, Tref
(2)
= the reactivity derivatives with re- spect to soluble boron, core power and pr imary coolant temperature, respectively;
= reference condi t ions of soluble boron concentra t ion, core power

512 14CH. M i l l e r / A simple nuclear power plant simulator
and primary coolant temperature, respectively;
B, q~, Tp = actual soluble boron, core power and primary coolant temperature, respectively, at the current time step;
,Jp~, = rod worth as a function of rod position.
Control rod worths are calculated using a representative differential rod worth curve normalized to the total worth given for the four maneuvering rod banks.
The axial core power distribution is approximated at six axial positions using simple nodal equations as used in the F L A R E code by Delp et al. [2]. The reactivity of each axial core segment is calculated based upon rod positions only. Thermal feedback effects are not in- cluded in this calculation.
To model the primary and secondary coolant loops, many assumptions were necessary to simplify the calcu- lational model and yet provide a realistic system re- sponse to transients. These assumptions include:
(1) The temperatures in the primary and secondary loops can be represented by single, average tempera- tures Tp and T~, respectively.
(2) An automatic control system is assumed for the turbine which establishes secondary coolant flow and turbine inlet pressure. This control system operates such that: (a) the water level in the steam generator remains constant; (b) the steam quality (or superheat) to the turbine is constant.
(3) Since the steam generator water level is assumed constant, the heat transfer coefficient in the steam gen- erator is a constant, U~g.
(4) Condenser conditions (i.e. inlet and outlet pres- sure and temperature) remain constant at all times.
(5) Since condenser conditions are assumed to re- main constant, the effective mass of water in the sec- ondary can be represented by the mass of coolant from the outlet of the feedwater pump to the inlet to the condenser. This effective mass is used in the heat bal- ance equations for determining changes in temperature.
(6) The ratio of the power delivered to the turbine to the heat rejected by the condenser is constant.
Simple equations can now be written for the coolant loops. First, the rate of heat transfer through the steam generator, q~, can be determined (based upon assump- tion 3) by
q~ = U~g(Tp- 77~ ) , (3)
where Tp is primary coolant loop temperature and 77. ` secondary coolant loop temperature. U~g is initially evaluated by setting qsg, Tp, and 77, to their correspond- ing values at 100% power. If q¢ is the core power and qt the turbine demand (including the heat rejected by the condenser), then two heat balance equations can be written as
( q~ -- q~g)At =
( q~g - qt ) A t =
where
t, and t i _ 1
mpCp[ Tp( ti ) - Tp( t i_ l)], (4)
(5)
= the time at the current and previous time step, respectively,
',3t = t i - ti ~, time step interval, m p = mass of coolant in the primary loop, m~ = effective mass (see assumption 5) of the
secondary coolant loop, Cp = specific heat of water (different values
may be used for the primary and sec- ondary coolant loops),
Eq. (3)-(5) can then be solved for Tp(ti) and T~(t,). Based upon assumption 2b, the pressure in the sec-
ondary (that is the pressure of steam delivered to the turbine) can be determined from the secondary temper- ature such that constant quality (or superheat) is main- tained:
where ,. =
P , . r e , 77,.ro~ =
( A p / A t ) s =
(6)
secondary pressure, the secondary pressure and temperature at reference conditions (typically 100% power), linear, first order approximation to the change in pressure corresponding to a change in temperature which maintains constant steam quality (or superheat).
Finally, the pressure in the primary coolant loop is calculated using the thermal coefficient of expansion for the water in the primary loop and the volume of water in the primary loop, and assuming ideal gas laws for the steam "bubble" in the upper half of the pressurizer. Thus, the primary loop pressure, pp is given by
Pref Pp = (7)
- ( -Trof)'mp
where Pref, Vref, Tref = the primary pressure, the steam volume
in the pressurizer and the primary coolant temperature, respectively, at reference conditions (typically 100% power),
( A v / A T ) = linear, first order derivative for the change in primary coolant specific volume as a function of temperature.
These equations provide the basic model for simu- lation. It should be noted that the assumptions used to develop these equations limit the operating range of the simulator to "normal" conditions from hot zero power to full power. No fault or accident conditions can be simulated. As discussed below, the simulator does pro-

W.H. Miller/A simple nuclear power plant simulator 513
vide alarm and scram set points which may be en- countered during power transients, but loss-of-coolant accidents, loss-of-load conditions, etc., are not included on the current model.
The modelling equations have not been written to include the transport delays (i.e., the time required for coolant water to move from the reactor to the steam generator, etc.) in the system. The equations do ex- plicitly model delays associated with the thermal heat capacity of the primary and secondary loops, which is an important effect. Transport delays are implicitly included in the relatively long time step of 15 s (for successive solutions to the plant conditions) which is comparable in magnitude to the total transport time in a PWR. Although this treatment is not rigorous, the resulting effect is realistic. As will be seen in section 5 later, the simulator reactor power will oscillate due to natural feedback effects at a frequency of approxi- mately two to four minutes, which is typical of a real power plant.
3. Operator interface
Fig. 1 is a picture of the minicomputer system used for this simulator. Fig. 2 shows a close-up of the CRT output which gives a schematic of the plant and lists all important reactor parameters. These parameters are up- dated every 15 s, reflecting the most recent calculation of the model. The output on the screen includes a plot of the axial power distribution and graphically shows the position of each of the control rod banks. Included at the bottom of the screen are seven alarm and scram functions for primary coolant temperature, primary coolant pressure, secondary coolant temperature, sec- ondary coolant pressure, excess positive reactivity, pres- surizer water level and axial power offset. A hard copy listing of all plant parameters at each time step is also provided for analysis at the end of a run.
The "opera tor" has control of three basic functions: turbine demand, control rod positions (three maneuver- ing rod banks and one part length rod bank) and soluble boron feed and bleed. By placing the "joy-st ick" at various specified positions on the screen, functions are controlled. Turbine demand can be changed to any desired level, but the model limits the rate of power change (typically 5% per minute). Control rods are moved up or down at the standard rates specified for the control rod drive mechanisms. Soluble boron can also be varied based upon standard chemical shim feed and bleed rates. No automatic reactor control system is included in the model so the operator is responsible for maintaining reactor power.
4. Implementation
This simulator model is implemented on a PDP-I 1 minicomputer interfaced to an EYECOM graphics
Fig. 1. PDP-I 1 minicomputer with EYECOM vidio-graphics terminal. Fig. 2. CRT display of simulator output.

514 HC H. Mil ler /A simple nuclear power plant simulator
terminal (which also serves as the console device). The computer has 24K of memory and uses the RT-11 operating system. All software is programmed in FOR- T R A N with subroutines for various functions: graphic display, operator input, core parameters, secondary parameters, etc. M A I N sets plant parameters and requests input
variables (i.e. initial power, hard-copy out- put option, etc.),
I N I T draws the schematic of the power plant, O P R A T R reads the joystick location from the screen
and initiates the appropriate control func- tion, calculates primary and secondary coolant loop parameters, calculates core reactivity and updates core flux, lists pertinent plant parameters on the CRT screen, establishes a constant time interval for each iteration. If time is left after performing the calculations for a new time step, the pro-
T H E R M O
C O R E
O U T P U T
T I M O U T
gram waits. If too much time is required, a message is printed and the program stops.
It is felt that this simulator could be programmed on any small computer. The core requirements are not great and most of the software is associated with input from the joystick and output to the CRT screen (which will be machine specific). Equations used in the CORE and T H E R M O subroutines are described in section 2 and are not difficult to program. A micro-computer could be used although programming in the BASIC language might be too slow for reasonable (i.e. 15 s) time intervals. A minimum micro-computer requirement may be the use of a F O R T R A N compiler.
(Software for the PDP-1 I / E Y E C O M system is avail- able from the author upon request.)
5. Resul ts
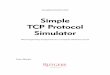
To demonstrate the operation of the simulator, the results of two transients are shown in figs. 3 and 4. The first transient is the result of lowering the turbine de-
I 0 0 %
o 90 0..
b .
u. 8 0 o I.--
z w u
'~ 70
• /TURBINE DEMAND
O W E R
I , I , I , I
4- ' 0
I .-
l , -
IJJ
I
o
- I
it,.. Q .
6 04 L,,/J/ ~t" , i I i I = I , I ,
0 2 4. 6 8 TIME (MINUTES)
Fig. 3, Resul ts for a t u rb ine t rans ien t f rom 100% to 65% of full power .
I
f
I
1o

W.H. Mil ler /A simple nuclear power plant simulator 515
I0 °
i O - t E A C T O R POWER
w
0 10 .4 / ~TURBINE DEMAND
I I
Q
g - 4 0
o
~ 600 I Q.
~ 580
o -L a-600 =E tJd I--
> - 5 7 5
e ~
n
o I 5
Fig. 4. Results of a "start-up" transient.
/ I /
J / J /
/ /
/
I I I
I0 15 20
TIME (MINUTES)
m a n d from 100% to 65% of full power at a 5% per minute rate. The second is a " s t a r t -up" t ransient where the reactor is initially at very low power and is b rought to power-range operation. The handl ing of these tran- sients by the "ope ra to r " is by no means opt imum, but represents a typical effort by a s tudent who is learning to use the simulator.
The first t ransient (shown in fig. 3) requires the opera tor to follow the l inear decrease of turbine power with respect to time by control l ing the reactivity in the core. This maneuver progresses fairly well until about four minutes elapse. At this point the rod insert ion rate creates enough negative reactivity to reduce the core power significantly below the turbine demand. The op- erator appearent ly noticed this problem and began withdrawing a rod bank at about the same time the modera tor reactivity coefficient added positive reactiv- ity due to the dropping modera to r temperature. These two effects combined to create positive reactivity and an increase in the reactor power. It then took a few minutes to dampen these oscillations. After about eight minutes the reactor can be seen to slowly oscillate a round a
s teady-state power of 65%. These oscillations are con- trolled by reactivity feedback effects only.
The second transient shows the start-up of the reac- tor from essentially zero power to 100% power. It is realized that an actual power plant would not accom- plish this t ransient in 25 min, bu t it gives the s tudent experience in reactivity control by first establishing a relatively large positive period and then reducing the rate of reactor power escalation to match the turbine demand rate. As can be seen in fig. 4, the reactor is b rough t to 1% of full power in about five minutes. By keeping the reactor power greater than the turbine demand in the next three minutes, the pr imary coolant is increased from a hot, zero power temperature to a nominal , power operat ion temperature. At about ten minutes (with the power at approximately 10%) boron feed is init iated so that the control rod bank can be wi thdrawn as power escalation continues. This insures tha t the axial power dis t r ibut ion within the core will not have excessive offset when the plant reaches full power. As a result several different plant operat ing parameters are utilized to successfully accomplish this transient.

516 VILH. Mil ler/A simple nuclear power plant simulator
6. Conclusions
The nuclear power plant s imulator has become a valuable teaching aid for s tudents of nuclear engineer- ing. Many concepts which are difficult to visualize otherwise, are readily apparent on the simulator. These include the response of core power to reactivity changes, thermal feedback effects, the effect of control rods on the axial power distr ibution, the temperature and pres- sure effects of a power imbalance between the reactor and the turbine, etc. This latter effect was of part icular interest to the author of this paper because s tudents so often solve the steady-state thermodynamics equations for a power plant that t ransient behavior is often dif- ficult for them to comprehend.
Al though many assumptions were made in develop- ing the model, it is based upon first principles. The transients given in section 5 have not been directly compared to a " rea l " power plant. However, the results
appear to give a reasonably accurate representat ion of power plant operation, especially considering the sim- plification used in the model and the relative ease of implementat ion. For a teaching aid of this type it is impor tan t that cause and effect relat ionships are rea- sonably represented even though the absolute accuracy of the model may be somewhat in error. Based upon this criteria the simulator is an excellent educational tool.
References
[1] R.G. Foster, J.W. Earles and S.M. Temple, Trans. Am. Nucl. Soc. 32 (1979) 619-621. (Full paper also available from Nuclear Power Plant Systems, Combustion En- gineering, TIS-6201.)
[2] D.L. Delp, D.L. Fischer, J.M. Harrison and M.J. Stoddard, GEAP-4598 (1964).