Embed Size (px)
Citation preview

Calhoun: The NPS Institutional Archive
Theses and Dissertations Thesis Collection
2014-03
Development of a locomotion interface for portable
virtual environment systems using an
inertial/magnetic sensor-based system and a
ranging measurement system
Yang, Chuan Hao
Monterey, California: Naval Postgraduate School
http://hdl.handle.net/10945/41459

NAVAL
POSTGRADUATE
SCHOOL
MONTEREY, CALIFORNIA
DISSERTATION
This dissertation was performed at the MOVES Institute
Approved for public release; distribution is unlimited
DEVELOPMENT OF A LOCOMOTION INTERFACE FOR
PORTABLE VIRTUAL ENVIRONMENT SYSTEMS
USING AN INERTIAL/MAGNETIC SENSOR-BASED
SYSTEM AND A RANGING MEASUREMENT SYSTEM
by
Chuan Hao Yang
March 2014
Dissertation Supervisor: Xiaoping Yun

THIS PAGE INTENTIONALLY LEFT BLANK

REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704–0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188) Washington, DC 20503. 1. AGENCY USE ONLY (Leave blank)
2. REPORT DATE March 2014
3. REPORT TYPE AND DATES COVERED Dissertation
4. TITLE AND SUBTITLE DEVELOPMENT OF A LOCOMOTION INTERFACE FOR PORTABLE VIRTUAL ENVIRONMENT SYSTEMS USING AN INERTIAL/MAGNETIC SENSOR-BASED SYSTEM AND A RANGING MEASUREMENT SYSTEM
5. FUNDING NUMBERS
6. AUTHOR(S) Chuan Hao Yang 7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
Naval Postgraduate School Monterey, CA 93943-5000
8. PERFORMING ORGANIZATION REPORT NUMBER
9. SPONSORING /MONITORING AGENCY NAME(S) AND ADDRESS(ES) N/A
10. SPONSORING/MONITORING AGENCY REPORT NUMBER
11. SUPPLEMENTARY NOTES The views expressed in this thesis are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S. Government. IRB Protocol number ____N/A____.
12a. DISTRIBUTION / AVAILABILITY STATEMENT Approved for public release; distribution is unlimited
12b. DISTRIBUTION CODE
13. ABSTRACT (maximum 200 words) This dissertation describes the development of an integrated locomotion interface for building self-contained, portable, and immersive virtual environment (VE) systems. Such VE systems do not rely on any infrastructure support and can be used in indoor/outdoor open spaces. The natural walking motions of the user are utilized as a means of signal generation to drive the locomotion interface, which provides the user with a higher sense of presence. This work investigates the use of two types of measurement systems, the inertial/magnetic measurement units and the ranging measurement systems, to develop a locomotion interface for portable VE systems. Algorithms were developed for each of the two systems to provide the necessary functionalities of the desired locomotion interface. Fusing measurements from a head-mounted and a foot-mounted inertial/magnetic sensor, a locomotion interface was developed for allowing the use of natural walking motions to navigate through virtual environments. To prevent collisions with physical environment boundaries such as walls, a ranging measurement system was used to detect the presence of obstacles. An improved Iterative Closest Point (ICP) algorithm was developed for map-building of the physical environment and for estimating the user’s orientation and position within the map. A redirected-walking mechanism was utilized for redirecting the user’s walking direction away from boundaries in the physical environment. The two types of measurement systems were integrated to constitute a novel locomotion interface for portable VE systems, and its effectiveness was experimentally tested and demonstrated.
14. SUBJECT TERMS locomotion interface, virtual environment, inertial/magnetic measurement unit, ranging measurement system, map-building, localization, redirected walking, iterative closest point.
15. NUMBER OF PAGES
171 16. PRICE CODE
17. SECURITY CLASSIFICATION OF REPORT
Unclassified
18. SECURITY CLASSIFICATION OF THIS PAGE
Unclassified
19. SECURITY CLASSIFICATION OF ABSTRACT
Unclassified
20. LIMITATION OF ABSTRACT
UU NSN 7540–01-280-5500 Standard Form 298 (Rev. 2–89) Prescribed by ANSI Std. 239–18
i

ii
THIS PAGE INTENTIONALLY LEFT BLANK

iii
Approved for public release; distribution is unlimited
DEVELOPMENT OF A LOCOMOTION INTERFACE FOR PORTABLE
VIRTUAL ENVIRONMENT SYSTEMS USING AN INERTIAL/MAGNETIC
SENSOR-BASED SYSTEM AND A RANGING MEASUREMENT SYSTEM
Chuan Hao Yang
Major, Taiwan Army
B.S., Chung Cheng Institute of Technology, National Defense University, Taiwan, 2001
M.S., Naval Postgraduate School, 2005
Submitted in partial fulfillment of the
requirements for the degree of
DOCTOR OF PHILOSOPHY IN
MODELING, VIRTUAL ENVIRONMENTS, AND SIMULATION (MOVES)
from the
NAVAL POSTGRADUATE SCHOOL
March 2014
Author: __________________________________________________
Chuan Hao Yang
Approved by:
______________________ _______________________
Xiaoping Yun Eric Bachmann
Professor of MOVES Professor of MOVES
Dissertation Supervisor
______________________ _______________________
Don Brutzman Peter Chu
Professor of MOVES Professor of MOVES
______________________ _______________________
Christian Darken Roberto Cristi
Professor of MOVES Professor of ECE
Approved by: _________________________________________________________
Christian Darken, Chair, MOVES Academic Committee
Approved by: _________________________________________________________
Peter J. Denning, Chairman, Department of Computer Science
Approved by: _________________________________________________________
Douglas Moses, Vice Provost for Academic Affairs

iv
THIS PAGE INTENTIONALLY LEFT BLANK

v
ABSTRACT
This dissertation describes the development of an integrated locomotion interface for
building self-contained, portable, and immersive virtual environment (VE) systems. Such
VE systems do not rely on any infrastructure support and can be used in indoor/outdoor
open spaces. The natural walking motions of the user are utilized as a means of signal
generation to drive the locomotion interface, which provides the user with a higher sense
of presence.
This work investigates the use of two types of measurement systems, the
inertial/magnetic measurement units and the ranging measurement systems, to develop a
locomotion interface for portable VE systems. Algorithms were developed for each of the
two systems to provide the necessary functionalities of the desired locomotion interface.
Fusing measurements from a head-mounted and a foot-mounted inertial/magnetic sensor,
a locomotion interface was developed for allowing the use of natural walking motions to
navigate through virtual environments. To prevent collisions with physical environment
boundaries such as walls, a ranging measurement system was used to detect the presence
of obstacles. An improved Iterative Closest Point (ICP) algorithm was developed for
map-building of the physical environment and for estimating the user’s orientation and
position within the map. A redirected-walking mechanism was utilized for redirecting the
user’s walking direction away from boundaries in the physical environment. The two
types of measurement systems were integrated to constitute a novel locomotion interface
for portable VE systems, and its effectiveness was experimentally tested and
demonstrated.

vi
THIS PAGE INTENTIONALLY LEFT BLANK

vii
TABLE OF CONTENTS
I. INTRODUCTION........................................................................................................1 A. BACKGROUND ..............................................................................................1 B. SIGNIFICANCE AND POTENTIAL IMPACT ..........................................4 C. SPECIFIC OBJECTIVES OF THE RESEARCH .......................................4
D. SYSTEM HARDWARE CONFIGURATION ..............................................5 E. DISSERTATION OUTLINE ..........................................................................9
II. BACKGROUND KNOWLEDGE ............................................................................11 A. SENSOR TECHNIQUES ..............................................................................11
1. Ultrasonic Sensors ..............................................................................11
2. Laser-Based Ranging Sensors ...........................................................16
3. Inertial/Magnetic Sensors .................................................................17
B. INERTIAL/MAGNETIC SENSOR-BASED PERSONAL
LOCALIZATION ..........................................................................................18
C. SIMULTANEOUS LOCALIZATION AND MAP-BUILDING ...............24 D. REDIRECTED WALKING ..........................................................................26
E. SUMMARY ....................................................................................................30
III. RANGING MEASUREMENT SYSTEM-BASED MAP-BUILDING AND
LOCALIZATION ALGORITHMS .........................................................................31
A. POINT-BASED MAPS ..................................................................................31 B. MATCH OF TWO POINT-BASED MAPS USING THE ITERATIVE
CLOSEST POINT (ICP) ALGORITHM ....................................................33 C. OUTLIER REJECTION FOR THE ICP ALGORITHM .........................39
D. MERGENCE OF TWO MATCHED POINT-BASED MAPS ..................45 E. REAL-TIME IMPLEMENTATION OF THE POINT-BASED MAP-
BUILDING AND LOCALIZATION PROCESS ........................................49 F. LINE-BASED REPRESENTATION FOR THE ORIGINAL POINT-
BASED MAPS ................................................................................................56
1. Motivation ...........................................................................................56 2. Hough Transform ..............................................................................57
3. Conversion of Point-Based Maps into Line-Based Maps ...............59 G. REAL-TIME IMPLEMENTATION OF THE LINE-BASED MAP-
BUILDING AND LOCALIZATION PROCESS ........................................63 1. Match of a Line-Based Map with a Point-Based Map using the
ICP Algorithm ....................................................................................63
2. Line Feature-Based Transformation Correction ............................65 3. Real-time Map-building and Localization using the
Combination of the ICP Algorithm and the Line Feature-based
Transformation Correction Mechanism ..........................................69 H. LOCAL MINIMUM ESCAPE MECHANISM FOR THE ICP
ALGORITHM ................................................................................................75 I. LIMITATIONS ..............................................................................................78

viii
J. SUMMARY ....................................................................................................81
IV. IMPROVED MAP-BUILDING AND LOCALIZATION ALGORITHMS
FOR HIVE ENVIRONMENT ..................................................................................83
A. SEPARATION OF MAP-BUILDING AND LOCALIZATION
PROCESSES ..................................................................................................83 1. Motivation ...........................................................................................83 2. Environment Requirements ..............................................................84
B. MAP-BUILDING PROCESS .......................................................................84
C. LOCALIZATION PROCESS.......................................................................89 D. SUMMARY ....................................................................................................94
V. INERTIAL/MAGNETIC SENSOR-BASED LOCOMOTION INTERFACE
FOR VIRTUAL ENVIRONMENT SYSTEMS ......................................................97
A. BACKGROUND AND MOTIVATION ......................................................97 B. MECHANISMS FOR RELATING WALKING MOTIONS ..................101
1. Preprocessing of the Sensor Data ...................................................101 2. Gait-Phase Detection .......................................................................103
3. Mechanism for Stance Phase ..........................................................103 4. Mechanism for Swing Phase ...........................................................105 5. Mechanisms for Walking Motions .................................................108
C. MECHANISMS FOR RELATING THE COMBINATION OF HEAD
AND WALKING MOTIONS .....................................................................108
D. SUMMARY ..................................................................................................114
VI. INERTIAL/MAGNETIC SENSOR-BASED LOCOMOTION INTERFACE
INCORPORATED WITH A RANGING MEASUREMENT SYSTEM ............115
A. BACKGROUND AND MOTIVATION ....................................................115
B. REDIRECTED WALKING FOR OBSTACLE AVOIDANCE ..............117
1. Original Redirected-Walking Mechanism .....................................117 2. Information Provided by the Ranging Measurement System .....119
3. Dynamically-Updated Target Direction Substituted for
Particular Predefined Locations in the Redirected-Walking
Mechanism ........................................................................................120
4. Potential Field-Based Redirected-Walking Mechanism...............122 5. Mechanisms Addressing Particular Conditions Incorporated in
the Potential Field-Based Redirected-Walking Mechanism ........125 C. EXPERIMENT RESULT ...........................................................................127 D. LIMITATIONS ............................................................................................133
E. SUMMARY ..................................................................................................135
VII. CONCLUSION AND RECOMMENDATIONS ...................................................137 A. CONTRIBUTIONS......................................................................................137 B. RECOMMENDATIONS FOR FUTURE WORK ....................................138
LIST OF REFERENCES ....................................................................................................141
INITIAL DISTRIBUTION LIST .......................................................................................147

ix
LIST OF FIGURES
Figure 1. A person wearing a head-mounted display (from [5]). ......................................1 Figure 2. A person accesses an immersive virtual environment through the CAVE
(from [7]). ..........................................................................................................2 Figure 3. Vehicle simulator: a soldier tests out a heavy-wheeled-vehicle driver
simulator (from [8]). ..........................................................................................2
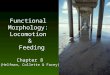
Figure 4. The portable immersive VE system utilizing an nVisor SX60 head-
mounted display system. The figure on the left shows the head-mounted
display and the backpack equipped with the video control unit and a laptop
computer for running the virtual environments. The figure on the right
shows a person carrying a similar VE system. ..................................................6
Figure 5. The InertiaCube2+ inertial/magnetic measurement unit (from [17]). ...............6
Figure 6. The MicroStrain 3DM-GX3-25 inertial/magnetic measurement unit (from
[18])....................................................................................................................7 Figure 7. An ultrasonic ranging measurement system. The same backpack as shown
in Figure 4 is used but only equipped the ultrasonic ranging measurement
system. The system contains an ultrasonic control unit and eight ultrasonic
transducers arranged in two sets of semi-rings around the user. .......................7 Figure 8. The UTM-30LX ranging measurement system (from [19]). .............................8 Figure 9. The UTM-30LX ranging measurement system integrated into the portable
immersive VE system as shown in Figure 4. .....................................................8 Figure 10. Notional distance estimation process of a transmitter/receiver type of
ultrasonic ranging devices................................................................................12 Figure 11. Notional distance estimation process of an ultrasonic transducer. ..................12
Figure 12. Notional ultrasonic target tracking system (from [23]). ..................................14 Figure 13. An example configuration of ultrasonic transducers for the ultrasonic
ranging measurement system. ..........................................................................15 Figure 14. Process timing diagram of the ultrasonic ranging measurement system. ........16 Figure 15. Top view of the notional representation of the scanning area of the UTM-
30LX laser ranging measurement system (from [25]). ....................................17
Figure 16. Three components of the velocity (from [28]): velocities obtained by
integrating the original acceleration measurements (left) and obtained by
integrating the drift-corrected accelerations (right). ........................................20 Figure 17. Strap-down navigation algorithm combined with the zero velocity update
(ZUPT) mechanism and the gait phase detection mechanism (from [29]). .....21
Figure 18. Quaternion-based complementary filter (from [29]). ......................................22
Figure 19. A self-contained inertial/magnetic sensor-based PNS consisting of the
strap-down navigation algorithm, the gait-phase detection mechanism, and
the adaptive gain quaternion-based complementary filter (from [29]). ...........23 Figure 20. Desired result of the redirected-walking mechanism. Three hypothetical
paths that the user takes in the virtual environment (right) and the
corresponding paths that the user is actually steered to take in the real
physical environment (left) (adapted and revised from [44]). .........................28

x
Figure 21. Block diagram of the redirected-walking mechanism (adapted and revised
from [42] and [44]). .........................................................................................28 Figure 22. An example of point-based maps. The ranging measurement system is
located at (0, 0) in the map consisting of a set of 1081 points. The map
was taken in Spanagel Hall (5th floor corridor near the east-side elevators)
of the Naval Postgraduate School. ...................................................................32 Figure 23. The actual environment for the example shown in Figure 22. The picture
was taken in Spanagel Hall (5th floor corridor near the east-side elevators)
of the Naval Postgraduate School. ...................................................................33
Figure 24. A notional ICP process: (1) for each point in scan A, assign the closest
point in scan B as its corresponding point, (2) calculate the transformation
and apply it to scan A, (3) for each point in the transformed scan A, assign
the closest point in scan B as its corresponding point, and (4) calculate the
transformation and apply it to the transformed scan A. ...................................35 Figure 25. Scan-matching process using the ICP algorithm for two point-based scans.
The upper figure shows two separate scans in blue and red, respectively.
The lower-left figure shows all of the iterations for the blue scan to
converge toward the red scan. The lower-right figure shows the result.
Both scans consist of a set of 1081 points and were taken in Spanagel Hall
(5th floor corridor near the east-side elevators) of the Naval Postgraduate
School. .............................................................................................................38 Figure 26. A notional illustration of the outliers. The points that exist in either scan
but have no correspondence in the other are regarded as outliers. ..................39 Figure 27. Scan-matching process using the ICP algorithm without rejecting the
outliers. The upper figure shows two separate scans in blue and red,
respectively. The blue scan consists of a set of 1047 points, while the red
scan consists of a set of 1081 points. The lower-left figure shows all of the
iterations for the blue scan to converge toward the red scan. The lower-
right figure shows the result. Both scans were taken in Spanagel Hall (5th
floor corridor near the east-side elevators) of the Naval Postgraduate
School. .............................................................................................................40
Figure 28. A notional illustration of the portion of outliers to be filtered out. The
portion of scan A that falls outside the angular range of scan B is to be
filtered out. In the figure, the angular range is referred to as the angular
viewing range of scan B from the sensor viewpoint where scan B was
taken, and the sensor (origin) point represents the position of the ranging
measurement system. .......................................................................................42 Figure 29. Scan-matching process using the ICP algorithm combined with the outlier
rejection mechanism proposed in this research. The upper figure shows
two separate scans in blue and red, respectively. The blue scan consists of
a set of 1047 points, while the red scan consists of a set of 1081 points.
The lower-left figure shows all of the iterations for the blue scan to
converge toward the red scan. The lower-right figure shows the final result.
Both scans were taken in Spanagel Hall (5th floor corridor near the east-
side elevators) of the Naval Postgraduate School. ...........................................44

xi
Figure 30. A notional illustration of the merging process. Two matched point-based
scans being merged are shown in (a). Following the merging rules, the
resulting map (scan) is shown in (b). In the figure, the angular range is
referred to as the angular viewing range of the new scan from the sensor
viewpoint where the new scan was taken, and the sensor (origin) point
represents the position of the ranging measurement system. ...........................47 Figure 31. An example of merging two matched scans following the three simple
rules. The upper figure shows two matched scans. The scan in red
represents the transformed old scan consisting of 1081 points, while the
scan in blue represents the newly acquired scan consisting of 1047 points.
The lower figure shows the resulting scan obtained by merging the two
matched scans. Both scans in the upper figure were taken in Spanagel Hall
(5th floor corridor near the east-side elevators) of the Naval Postgraduate
School. The resulting scan consists of a set of 1242 points. ............................48 Figure 32. An example of the map-building and localization process cycle. The
upper-left figure shows two separate scans. The one in red is the old scan
consisting of 1081 points, and the one in blue is the new scan consisting of
1047 points. The upper-right figure shows all of the iterations for the old
scan to converge toward the new scan. The lower figure shows the
resulting scan obtained by merging the two matched scans. Both scans in
the upper-left figure were taken in Spanagel Hall (5th floor corridor near
the east-side elevators) of the Naval Postgraduate School. The resulting
scan consists of a set of 1242 points. ...............................................................53 Figure 33. An example of the real-time point-based map-building and localization
process. The point set in blue represents the resulting map of the
environment, while the point set in red shows the trajectory of the ranging
measurement system. The map consisting of 1473 points was built by
matching and merging 81 individual scans. The coordinate system of the
map is relative to the start position and orientation of ranging
measurement system. Although the actual initial and final positions were
both (0, 0), the estimation result shows that the initial position (0, 0) and
the final position (-1.15098078202, -0.874567350456) do not match due
to the errors accumulated during each of the scan-matching processes. The
test was implemented in an indoor basketball court of Miami University in
Oxford, Ohio. ...................................................................................................55 Figure 34. The actual environment for the process shown in Figure 33. It is an indoor
basketball court of Miami University in Oxford, Ohio....................................56 Figure 35. A straight line represented in different coordinate systems: (a) Cartesian
coordinate system, (b) Cartesian coordinate system, and (c) - parameter
space (polar coordinate system). ......................................................................58
Figure 36. A notional example for steps of converting a point-based map into a line-
based map.........................................................................................................61 Figure 37. An example of converting a point-based map into a line-based map. The
upper figure shows the original point-based map consisting of 1047 points.
The lower figure shows the converted line-based map consisting of 175

xii
line segments. The scan was taken in Spanagel Hall (5th floor corridor
near the east-side elevators) of the Naval Postgraduate School. .....................62 Figure 38. An example of the ICP scan-matching process that matches a line-based
map with a point-based map. The map in blue represents the point-based
map consisting of 1047 points. The map in red represents the line-based
map consisting of 316 line segments. The upper-left figure shows the
initial poses of the two maps. The upper-right figure shows all of the
iterations for the line-based map to converge toward the point-based map.
The lower figure shows the end of the last iteration of the convergence.
The original scans were taken in Spanagel Hall (5th floor corridor near the
east-side elevators) of the Naval Postgraduate School. ...................................64
Figure 39. Two corresponding line segments in a - coordinate system. .......................66 Figure 40. An example of the result of combining the ICP algorithm with the line
feature-based transformation correction mechanism. The upper figure and
lower figure show the results before and after using the correction
mechanism, respectively. The small alignment error between the red scan
and the blue scan in the upper figure can be corrected by applying the line
feature-based transformation correction mechanism. The original scans
were taken in Spanagel Hall (5th floor corridor near the east-side elevators)
of the Naval Postgraduate School. ...................................................................68 Figure 41. An example of the line-based map-building and localization process using
the combination of the ICP algorithm and the line feature-based
transformation correction mechanism. To show the performance in terms
of estimation accuracy in comparison with the point-based process as
shown in Figure 33, a post process with the same threshold value for the
ICP algorithm is implemented and fed with the same raw sensor data. The
line set in different colors represents the resulting map of the environment,
while the point set in red shows the trajectory of the ranging measurement
system. The map consisting of 648 line segments was built by matching
and merging 81 individual scans. Although the actual initial and final
positions were both (0, 0), the estimation result shows that the initial
position (0, 0) and the final position (-0.841606400882, - 0.528697346803)
do not match due to the error accumulated during each of the scan-
matching processes. The original test was implemented in an indoor
basketball court of Miami University in Oxford, Ohio....................................71 Figure 42. An example of the line-based map-building and localization process using
the combination of the ICP algorithm and the line feature-based
transformation correction mechanism. The same raw sensor data used in
the example shown in Figure 41 are adopted. A lower threshold value of
the improvement in reducing the mean squared distance between every
pair of corresponding points for the ICP algorithm is adopted for a higher
performance in terms of estimation accuracy. The line set in different
colors represents the resulting map of the environment, while the point set
in red shows the trajectory of the ranging measurement system. The map
consisting of 648 line segments was built by matching and merging 81

xiii
individual scans. The actual initial and final positions are both (0, 0). The
estimates for initial and final positions are (0, 0) and (-0.327111495504, -
0.533314961374), respectively. The original test was implemented in an
indoor basketball court of Miami University in Oxford, Ohio. .......................72
Figure 43. An example of the real-time line-based map-building and localization
process using the combination of the ICP algorithm and the line feature-
based transformation correction mechanism. The line set in different
colors represents the resulting map of the environment, while the point set
in red shows the trajectory of the ranging measurement system. The map
consisting of 846 line segments was built by matching and merging 106
individual scans. The actual initial and final positions are both (0, 0). The
estimates for initial and final positions are (0, 0) and (-0.348965542645, -
0.071385533758), respectively. The test was implemented in an indoor
basketball court of Miami University in Oxford, Ohio....................................73 Figure 44. A comparison of the trajectories of ranging measurement system. The
trajectory in red is estimated by implementing the real-time line-based
map-building and localization process, while the trajectory in blue is
estimated by using the infrared precision position tracker (PPT) of the
huge immersive virtual environment (HIVE) [61]. The HIVE is located in
an indoor basketball court of Miami University in Oxford, Ohio. The RMS
error of the trajectory determined by the real-time, line-based map-
building and localization process relative to the one determined by the
PPT system is approximately 0.07 meters. ......................................................74 Figure 45. An example of the ICP scan-matching process that is trapped in a local
minimum. The process matches a line-based scan with a point-based scan.
The scan in blue represents the point-based scan consisting of 1014 points.
The scan in red represents the line-based scan consisting of 488 line
segments. The upper figure shows two individual scans. The lower left
figure shows all of the iterations for the line-based scan to converge
toward the point-based scan. The lower right figure shows the end of the
last iteration of the convergence. The two scans were taken in an indoor
basketball court of Miami University in Oxford, Ohio....................................76 Figure 46. An example of the ICP scan-matching process combined with the local
minimum escape mechanism. The process matches a line-based scan with
a point-based scan. The scan in blue represents the point-based scan
consisting of 1014 points. The scan in red represents the line-based scan
consisting of 488 line segments. The upper left figure shows two
individual scans. The upper right figure shows all of the iterations for the
line-based scan to converge toward the point-based scan. The lower figure
shows the end of the last iteration of the convergence. The two scans were
taken in an indoor basketball court of Miami University in Oxford, Ohio. .....78 Figure 47. An example of the scan-matching process for a corridor environment. The
process matches a line-based scan with a point-based scan. The scan in
blue represents the point-based scan consisting of 1035 points. The scan in
red represents the line-based scan consisting of 252 line segments. The left

xiv
figure shows two individual scans before being matched, while the right
figure shows the end of the last iteration of the convergence. It is noted
that the scan-matching result has large error along the direction parallel to
the walls. The scans were taken in Spanagel Hall (5th floor corridor) of the
Naval Postgraduate School. .............................................................................80 Figure 48. The actual environment for the example as shown in Figure 47. The
picture was taken in Spanagel Hall (5th floor corridor) of the Naval
Postgraduate School. ........................................................................................81 Figure 49. An example of the separated map-building process. The line set in
different colors represents the resulting map of the environment, while the
point set in red shows the trajectory of the ranging measurement system.
The map consisting of 713 line segments was built by matching 119
individual scans but merging only 10 of them. The 10 merged scans were
chosen evenly throughout all of the scans. The test was implemented in an
indoor basketball court of Miami University in Oxford, Ohio. .......................86
Figure 50. Trajectory of the ranging measurement system when building the map as
shown in Figure 49. The start and end positions are (0.0, 0.0) and
(0.199130768983, -0.000033682402), respectively. .......................................87 Figure 51. The comparison between the results of using the separated map-building
process (left) and the original map-building and localization process (right)
in a corridor environment. The final map on the left consisting of 5033
line segments was obtained by matching 862 scans but merging only 29 of
them. The final map on the right consisting of 6295 line segments was
obtained by matching and merging 862 scans. The point sets in red
represent the estimated trajectories when collecting the range data. The
map on the left better represents the shape of the actual environment,
while the one on the right appears shorter and more crooked. The scans
were taken in Spanagel Hall (5th floor corridor from one end to the other)
of the Naval Postgraduate School. ...................................................................88
Figure 52. An example of the separated real-time localization process using the map
built in the example as shown in Figure 49. The point set in red shows the
trajectory of the ranging measurement system within the map. The map
was matched against 138 new scans for estimating 138 data points within
the trajectory. The test was implemented in an indoor basketball court of
Miami University in Oxford, Ohio. .................................................................90 Figure 53. A comparison of the trajectories of ranging measurement system obtained
by using both the real-time localization process and the PPT system. The
trajectory in red is estimated by implementing the separated real-time
localization process, while the trajectory in blue is estimated by using the
PPT of the HIVE. The HIVE is located in an indoor basketball court of
Miami University in Oxford, Ohio. The RMS error of the trajectory
determined by the separated real-time localization process relative to the
one determined by the PPT system is approximately 0.02 meters. .................91 Figure 54. An example of the separated real-time localization process using the map
built in the example shown in Figure 49. The point set in red shows the

xv
trajectory of the ranging measurement system within the map. The map
was matched against 183 new scans for estimating 183 data points within
the trajectory. The test was implemented in an indoor basketball court of
Miami University in Oxford, Ohio. .................................................................92
Figure 55. A comparison of the trajectories of ranging measurement system obtained
by using both the real-time localization process and the PPT system. The
trajectory in red is estimated by implementing the separated real-time
localization process, while the trajectory in blue is estimated by using the
PPT of the HIVE. The HIVE is located in an indoor basketball court of
Miami University in Oxford, Ohio. The RMS error of the trajectory
determined by the separated real-time localization process relative to the
one determined by the PPT system is approximately 0.13 meters. .................93 Figure 56. The Sarcos Treadport comprising a large tilting treadmill with an active
mechanical tether (from [9]). ...........................................................................98 Figure 57. The Torus Treadmill consisting of 12 treadmills connected side-by-side
(from [11]). ......................................................................................................99 Figure 58. A soldier walks on the Omni-Directional Treadmill (from [13]). .................100
Figure 59. Top view of a notional representation of the IMMU attached to the foot. ....101 Figure 60. A notional representation of the beginning of swing phase during which a
person takes a step forward with the foot mounted with the IMMU. In this
example, a negative value is expected for the angular velocity about the y
axis of the IMMU’s moving body coordinate system. ..................................107
Figure 61. Flowchart of the mechanisms for relating the foot (walking) motions
during the composition of each frame. ..........................................................108 Figure 62. Top view of a notional representation of the IMMU attached to the head-
mounted display. ............................................................................................109
Figure 63. Flowchart of the mechanisms for relating the combination of head and
foot (walking) motions during the composition of each frame. .....................113 Figure 64. Desired result of the original redirected-walking mechanism. As the user
walks closer and closer to the wall in the physical environment, the virtual
trajectory may eventually go through the wall, while the real trajectory
will be gradually steered away from the wall and towards a specified
target location. It is noted that the virtual and real trajectories initially
overlapped with each other. ...........................................................................117 Figure 65. Block diagram of the original redirected-walking mechanism (adapted and
revised from [42] and [44]). ...........................................................................118 Figure 66. Notional representation of the range measurement as a vector with the
length and the bearing . ............................................................................119 Figure 67. Notional representation of eight range measurements around the ranging
measurement system. The terms R1 through R8 represent the distances
between the ranging measurement system and the obstacles. If there is no
obstacle within the maximum sensing range of the system, the max range
value will be represented. The filled circle represents the user carrying the
ranging measurement system. Note that the number of range
measurements will be based on the configuration of the ranging

xvi
measurement system. The use of eight measurements in this example is
only intended for illustrating the concept. .....................................................121 Figure 68. Repulsive potential field created by the eight notional range measurements
around the ranging measurement system. ......................................................121
Figure 69. Combined force of the potential field. The direction of the combined force
can be utilized as the target direction in the redirected-walking mechanism.
The term is the angle between the user’s heading direction and the target
direction in the physical environment. ...........................................................122
Figure 70. The potential field-based redirected-walking mechanism. The direction
coefficient is replaced with the sine of the half angle between the user’s
current heading direction and the target direction. ........................................123 Figure 71. Relationship between the system-induced VE rotation and the user-
adjusted walking direction change. ................................................................125
Figure 72. Flowchart of the process cycle determining the target direction. ..................127 Figure 73. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the Ballroom of
the Naval Postgraduate School). The approximate dimensions of the
physical environment are 48 x 15 meters. .....................................................128 Figure 74. The physical environment for conducting the experiments using the
locomotion interface developed in the previous chapter incorporated with
the potential field-based redirected-walking mechanism. The picture was
taken in the Barbara McNitt Ballroom of the Naval Postgraduate School. ...129
Figure 75. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the Ballroom of
the Naval Postgraduate School). The approximate dimensions of the
physical environment are 48 x 15 (meters). ...................................................130 Figure 76. The physical environment for conducting the experiments using the
locomotion interface developed in the previous chapter incorporated with
the potential field-based redirected-walking mechanism. The picture was
taken in the basketball court located in the Fitness Center Building of the
Naval Postgraduate School. ...........................................................................131 Figure 77. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the basketball
court in the gym of the Naval Postgraduate School). The approximate
dimensions of the physical environment are 22 x 35 (meters). .....................132
Figure 78. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the basketball
court in the gym of the Naval Postgraduate School). The approximate
dimensions of the physical environment are 22 x 35 (meters). .....................133

xvii
LIST OF TABLES
Table 1. A comparison in time consumption of map-building and localization
process with different correspondence search methods and setups
incorporated into the ICP algorithm (for a particular case the same as in
Figure 32). The program was implemented by using the Python script
language and executed on a laptop with an Intel Core i7 2.20GHz
processor. The code in the program is not optimized, and the value
produced is only intended for an approximate comparison. ............................54 Table 2. A comparison in time consumption of the process while matching two
different types of maps with a point-based map without applying down-
sampling to the maps for the correspondence search of each ICP iteration.
The raw measurements used for both setups are the same as the example
shown in Figure 38. The program was implemented by using the Python
script language and executed on a laptop with an Intel Core i7 2.20GHz
processor. The code in the program is never optimized, and the value
produced is only intended for giving a rough concept. ....................................65

xviii
THIS PAGE INTENTIONALLY LEFT BLANK

xix
LIST OF ACRONYMS AND ABBREVIATIONS
1D one-dimensional
2D two-dimensional
3D three-dimensional
AHRS attitude heading reference system
API application programming interface
CAVE cave automatic virtual environment
FQA factored quaternion algorithm
FRD forward-right-down
FRMSD fractional root mean squared distance
GPS global positioning system
HIVE huge immersive virtual environment
HMD head-mounted display
ICP iterative closest point
IMMU inertial/magnetic measurement unit
IMU inertial measurement unit
MEMS micro-electro-mechanical systems
ML maximum likelihood
NED north-east-down
ODT omni-directional treadmill
PNS personal navigation system
PPT precision position tracker
RMS root-mean-square
SA simulated annealing
SLAM simultaneous localization and map-building
SONAR sound navigation and ranging
VE virtual environment
ZUPT zero-velocity update

xx
THIS PAGE INTENTIONALLY LEFT BLANK

xxi
ACKNOWLEDGMENTS
I have received support and encouragement from many individuals over the past
four years. I would like to express my deep appreciation to my dissertation supervisor,
Professor Xiaoping Yun, for his guidance and support throughout the research as it
moved from an idea to a more tangible study, and finally became a completed work. I
would also like to thank all my dissertation committee members, Professor Eric
Bachmann, Professor Don Brutzman, Professor Peter Chu, Professor Christian Darken,
and Professor Roberto Cristi, for all of the valuable advice they provided.
I am grateful for the help and ideas offered by Professor James Calusdian,
especially during integrating the system components. His support in coping with the
mechanical and electronic hardware issues definitely made the entire research easier.
Last, but not least, I would like to thank my wife, Yihua Peng, for taking great
care of me as I buried myself in the research work.

xxii
THIS PAGE INTENTIONALLY LEFT BLANK

1
I. INTRODUCTION
A. BACKGROUND
A virtual environment (VE) is a computer-based simulated environment, in which
the users can interact with one another (other users) or with the objects (such as doors,
windows, and furniture) contained in this environment. The form and structure of a
virtual environment entirely depends on the purpose of constructing it. For example, it
can be a museum for educational purposes, a battlefield for military training purposes, or
any public place for social communications or entertainment purposes.
An immersive virtual environment is often referred to as a spatially large life-
sized virtual environment. The user’s awareness of physical self is represented by an
avatar (a graphical representation of the user) in first person encompassed by the
engrossing scene of the environment. One type of system configuration for achieving the
effects of immersion is to adopt a head-mounted display (HMD) with circumaural
headphones. This allows the system to be able to effectively block or diminish the user’s
visual and aural information regarding the actual physical environment and to replace it
with that of a designated virtual environment. An example of the head-mounted displays
is shown in Figure 1. The user’s sense of presence is better enhanced by this means than
by using a regular computer screen and speakers. (Presence is defined as the subjective
experience of being in one place or environment, even when one is physically situated in
another [1]. Examples of other studies regarding the sense of presence can be found in [2],
[3] and [4].)
Figure 1. A person wearing a head-mounted display (from [5]).

2
Another approach to achieving immersion is by adopting a cave automatic virtual
environment (CAVE)-like system infrastructure. The CAVE is a room-sized theater that
was first developed in the Electronic Visualization Laboratory at the University of Illinois
in Chicago, and it was announced and demonstrated at the 1992 SIGGRAPH [6]. The
walls and floor of the CAVE are generally made up of rear-projection screens and a
down-projection screen, respectively. The projected images on the screens are to be
converted into three-dimensional (3D) graphics seen by the user through a pair of special
glasses. The system infrastructure also provides 3D sound to complement the graphics.
An example of the CAVEs is shown in Figure 2.
Figure 2. A person accesses an immersive virtual environment through the CAVE
(from [7]).
There also exist some vehicle simulator designs that reproduce the characteristics
of real vehicles in virtual environments which are used effectively in pilot training. An
example of this kind of simulators is shown in Figure 3.
Figure 3. Vehicle simulator: a soldier tests out a heavy-wheeled-vehicle driver
simulator (from [8]).

3
Although the development of immersive VE systems has been thriving in recent
years, there are still issues that need to be addressed.
VE systems nowadays generally utilize specialized facilities with a sophisticated
pre-installed infrastructure, such as the previously mentioned CAVE-like systems and
vehicle simulators, or some tracking areas equipped with certain kinds of position
tracking systems (e.g., an optical-based tracking system) on the walls of specific
laboratory environments. There are also some infrastructures utilizing the treadmill
designs [9]‒[13] as the user locomotion interfaces, which allow the users to navigate
through virtual environments using relatively more natural walking gestures than other
designs, such as walking-in-place [14] or leaning [15]. Despite the great performance of
those facilities, to use them requires the users to schedule and travel to certain locations.
Although these facilities were often built at great expense, they are not as easily
accessible to the public as they need to be.
Other popular locomotion interfaces of VEs include keyboards, mice, joysticks, or
certain game controllers that provide limited sense of presence to users. To enhance the
user’s sense of presence, one of the approaches is to increase the requirements of user’s
body motions when interacting with virtual environments [4]. Many locomotion
interfaces were thus developed to utilize motion tracking designs that require actual body
gestures from the users. One approach is to utilize the user’s walking gestures as a kind
of input signal to the locomotion interface. However, some of such interfaces as the
walking-in-place or leaning designs were built to accommodate themselves to the limited
tracking areas such as the CAVE-like infrastructures and require body gestures that are
not as natural as normal walking motions. Some may even cause effects such as simulator
sickness.
Motivated to overcome limitations of the existing VE systems, the main goal of
this research is to develop a locomotion interface for building self-contained, portable,
and immersive VE systems. Such VE systems do not rely on any infrastructure support
and can be used in any open indoor or outdoor space. The natural walking motions will
be utilized as a means of signal generation for the locomotion interface to provide users

4
with a higher sense of presence, since these types of motions are exactly the same ones
humans use to navigate environments around them in daily life.
B. SIGNIFICANCE AND POTENTIAL IMPACT
In education and training applications, the cost associated with the construction of
immersive VE system facilities and the amount of time taken for the trainees to travel to
these facilities is huge. Moreover, these facilities often allow only a limited number of
people to access the virtual environment systems at a time. They are therefore relatively
inaccessible to most people considering the schedule and travel cost. By developing a
locomotion interface for building portable immersive VE systems that can function as
effectively as these facilities with relatively lower cost, education and training can be
made accessible to more people.
Many of the user locomotion interfaces adopted in current immersive VE systems
utilize keyboards, mice, joysticks, and other game controllers. Some better designs adopt
walking-in-place or leaning, which still provide users with limited sense of presence. The
treadmill designs allow the user to navigate through virtual environments using relatively
natural walking motions. However, they rely on infrastructures that do not meet the
requirement of portability. To achieve a better education or training result, these designs
need to be improved. By developing a locomotion interface that allows the user to use the
completely natural walking motions that coincide with the real-life conditions to navigate
through virtual environments, the education and training efficiency will be greatly
enhanced.
C. SPECIFIC OBJECTIVES OF THE RESEARCH
As mentioned earlier, the main goal of this research is to develop a locomotion
interface contributing to self-contained, portable, and immersive VE systems. The
requirement for a self-contained and portable VE system is to contain all the necessary
components (subsystems) that provide complete functionalities without needing support
from any pre-installed infrastructure, and that are light enough in weight to be carried by
a person. To enhance the sense of presence, the natural walking motions will be utilized
as a means of signal generation for the locomotion interface.

5
A head-mounted display-based system with circumaural headphones is adopted
because of its better portability compared with that of a CAVE-like system. The head-
mounted display is equipped with an inertial/magnetic measurement unit (IMMU) to
determine the orientation of the head. To detect the natural walking motions, additional
IMMUs are mounted on shoes to measure the accelerations and rotation rates of the feet.
A mechanism will be established to relate these real-time measurements (from both the
IMMUs on the head and the feet) to the walking motions in the virtual environment.
Such a VE system will be characterized by its locomotion interface that utilizes
natural walking motions, and it will work if the user is in an infinitely large open space.
However, in an actual open space with limited size, the user may collide with obstacles
(walls or other objects) as he/she navigates through the VEs. Thus, there is a need to
establish a mechanism for the user to avoid obstacles. To achieve this purpose, certain
ranging measurement systems will be integrated into the design of locomotion interface
to measure the distances and directions of obstacles relative to the location of user.
To summarize, the specific objectives of this research are:
To investigate the feasibility of using two types of measurement systems,
namely, inertial/magnetic measurement units and ranging measurement
systems, as a means to build a locomotion interface for self-contained,
portable, and immersive VE systems.
To develop algorithms for each of the two types of measurement systems
as candidates for the necessary functionalities of the locomotion interface.
To integrate the two types of measurement systems and their algorithms to
develop a desirable locomotion interface.
D. SYSTEM HARDWARE CONFIGURATION
The hardware components adopted in this research for investigating the
development of a locomotion interface will be introduced in this section. Note that the
research to be conducted will not be hardware specific, and that all of the components
may be replaced by choice as long as the necessary functionalities can be provided.
The head-mounted display along with a video control unit adopted in this research
is an nVisor SX60 by NVIS Inc. [16]. The portable immersive VE system consisting of

6
such a head-mounted display system and a laptop computer for running the virtual
environment is shown in Figure 4.
The inertial/magnetic measurement unit attached to the head-mounted display is
an InertiaCube2+ by InterSense Inc. [17] as shown in Figure 5. The inertial/magnetic
measurement unit attached to the shoe is a 3DM-GX3-25 by LORD MicroStrain Inc. [18]
as shown in Figure 6.
Figure 4. The portable immersive VE system utilizing an nVisor SX60 head-
mounted display system. The figure on the left shows the head-mounted
display and the backpack equipped with the video control unit and a laptop
computer for running the virtual environments. The figure on the right
shows a person carrying a similar VE system.
Figure 5. The InertiaCube2+ inertial/magnetic measurement unit (from [17]).

7
Figure 6. The MicroStrain 3DM-GX3-25 inertial/magnetic measurement unit (from
[18]).
An ultrasonic ranging measurement system was initially investigated because of
its low cost and simplicity. An example configuration of such a system is shown in
Figure 7. The system contains an ultrasonic control unit and eight ultrasonic transducers
arranged in two sets of semi-rings around the user.
Figure 7. An ultrasonic ranging measurement system. The same backpack as shown
in Figure 4 is used but only equipped the ultrasonic ranging measurement
system. The system contains an ultrasonic control unit and eight ultrasonic
transducers arranged in two sets of semi-rings around the user.
The ultrasonic ranging measurement system is replaced due to its low resolution
(eight measurements over a 360-degree coverage area) and short effective range (under 7

8
meters). The replacement is a UTM-30LX laser ranging measurement system by Hokuyo
Automatic Co., Ltd. [19]. Such a laser-based ranging measurement system has a higher
resolution (1081 measurements over a 270-degree coverage area) and a longer effective
range (30 meters). Furthermore, it operates more efficiently than the ultrasonic ranging
measurement system, since the light travels much faster than the sound. The UTM-30LX
ranging measurement system is shown in Figure 8. Its integration into the portable
immersive VE system is shown in Figure 9. It is intended to be placed above the head to
prevent the laser beams from being blocked by the human body.
Figure 8. The UTM-30LX ranging measurement system (from [19]).
Figure 9. The UTM-30LX ranging measurement system integrated into the portable
immersive VE system as shown in Figure 4.

9
E. DISSERTATION OUTLINE
The goal of this dissertation is to develop a locomotion interface contributing to
self-contained, portable, and immersive VE systems. Some background knowledge that
serves as the basis of this dissertation is provided in Chapter II. In search of a mechanism
that describes the physical environment surrounding the user for the subsequent obstacle
avoidance task, the ranging measurement system-based map-building and localization
algorithms are investigated and developed in Chapter III. The improved map-building
and localization algorithms that can be utilized in particular types of environments are
presented in Chapter IV. Without regard to the obstacle avoidance task, the
inertial/magnetic sensor-based locomotion interface for virtual environment systems is
developed in Chapter V. To approach the obstacle avoidance task, the locomotion
interface developed in Chapter V is integrated with a ranging measurement system. Such
an integrated locomotion interface is presented in Chapter VI. Lastly, the conclusion and
recommendations for future researches are summarized in Chapter VII.

10
THIS PAGE INTENTIONALLY LEFT BLANK

11
II. BACKGROUND KNOWLEDGE
In this chapter, several techniques are briefly introduced to aid the reader in
understanding the construction of a new locomotion interface for self-contained, portable,
and immersive virtual environment systems. The first part of this chapter includes
discussion of several sensor techniques. The ultrasonic and laser sensors are considered
as candidates to collect information of the physical environment for avoiding collisions
with obstacles, while the inertial/magnetic sensors are adopted to measure the user’s body
motions for building the major portion of the desired locomotion interface. An alternative
approach for avoiding obstacles is to keep track of the user’s current location in the
physical environment. The inertial/magnetic sensor-based personal localization and the
simultaneous localization and map-building are considered as candidates to serve this
purpose. Finally, the redirected-walking technique is introduced to utilize the knowledge
of user’s current location in the physical environment to avoid collisions with obstacles.
A. SENSOR TECHNIQUES
1. Ultrasonic Sensors
Range finding is a common use of ultrasound and is also called SONAR (sound
navigation and ranging). Ultrasonic ranging devices have been widely used in robotics.
Some are used to track environmental features for underwater navigation [20], [21]. Most
of other applications fall into the subjects of obstacle avoidance [22], [23] and target
tracking [23] depending on the configurations (types and position arrangements) of these
devices. However, the main function of the ultrasonic ranging devices is simply distance
estimation.
There are two types of ultrasonic ranging devices based on the means by which
distance estimation is performed. One type of these devices includes at least an ultrasonic
transmitter and an ultrasonic receiver. The distance being estimated is that between the
transmitter and receiver, and the estimation is accomplished by measuring the time taken
for the ultrasonic wave to travel from the transmitter to the receiver, which is only a one-
way trip (as shown in Figure 10). The other type uses only one ultrasonic transducer that
acts as the transmitter and also the receiver. The distance being estimated is that between

12
the ultrasonic transducer and the nearest obstacle (if any) within the maximum detection
range. This distance is estimated by measuring the time taken between the transmitting of
the ultrasonic wave and the receiving of its echo, which is a round trip (as shown in
Figure 11).
Figure 10. Notional distance estimation process of a transmitter/receiver type of
ultrasonic ranging devices.
Figure 11. Notional distance estimation process of an ultrasonic transducer.
The transmitter/receiver type of ultrasonic ranging devices usually have larger
detection ranges than the transducer type because the ultrasonic waves of the

13
transmitter/receiver type of ranging devices only need to travel one way and thus last
farther before attenuating below a certain detection threshold. The transmitter/receiver
type of ultrasonic ranging devices are therefore relatively more suitable for use in target
tracking, while the transducer type are more suitable for use in obstacles detection.
An example configuration of a target tracking system using the
transmitter/receiver type of ultrasonic ranging devices is shown in Figure 12. The
ultrasonic transmitter is attached to the target being tracked and periodically transmits
ultrasonic waves to be received by the two ultrasonic receivers. The two ultrasonic
receivers are installed at certain fixed locations in the tracking environment, in which the
estimated target position is represented in a fixed global coordinate system. They can also
be installed on a mobile robot, and the estimated target position will instead be
represented in a moving body coordinate system of the mobile robot. The distance *D
and bearing of the target relative to the coordinate origin can be estimated as
follows [23].
.4
22 22
2
2
1* dDDD
(2.1)
.22
cos9022
2
2
1
2
2
2
11
dDDd
DD (2.2)
1D and 2D are the measured distances between the ultrasonic transmitter and the
receivers A and B, respectively. d is the distance between the two receivers.

14
Figure 12. Notional ultrasonic target tracking system (from [23]).
The transducer type of ultrasonic devices are not suitable for use in target tracking
because they are not capable of distinguishing between different objects. However, these
devices perform fairly well in obstacle avoidance. The ultrasonic ranging measurement
system initially built in this research adopts this type of ultrasonic devices. By
determining a suitable configuration of a number of ultrasonic transducers, the distance
between each ultrasonic transducer and its nearest obstacle can be estimated. The
estimated distance and the aiming angle of the transducer make it possible to obtain an
approximation of how far and in what direction the obstacles are. The top view of an
example configuration of ultrasonic transducers for the ultrasonic ranging system is
shown in Figure 13, which is in correspondence with Figure 7. By detecting and
estimating the distance from the nearby obstacles (such as walls), the ultrasonic ranging
measurement system is able to provide the approximate obstacle information in the local
coordinate system of the user. The subsequent obstacle avoidance mechanism may be
implemented by using this information.

15
Figure 13. An example configuration of ultrasonic transducers for the ultrasonic
ranging measurement system.
To prevent the ultrasonic waves of the transducers from interfering with one
another, the transducers are configured to work in sequence, rather than simultaneously.
There should also be a blanking period between any two processing periods of
transducers for the ultrasonic wave of the previous transducer to attenuate below the
detection threshold of the next transducer. This will ensure that every transducer receives
its own ultrasonic signal. The only issue with this method is that it takes longer for all the
transducers to complete their cycles once. Therefore, the distance estimation update rate
may be greatly reduced when the number of transducers used increases. One cycle of the
process timing diagram of the ultrasonic ranging system with n transducers is shown in
Figure 14.

16
Figure 14. Process timing diagram of the ultrasonic ranging measurement system.
2. Laser-Based Ranging Sensors
One of the techniques laser-based ranging sensors use to determine the distance to
an object is the implementation of time-of-flight principle similar to that utilized by the
ultrasonic transducers. The sensor sends a laser pulse towards the object and measures the
time taken for the pulse to be reflected off the object and returned to the sensor. However,
it is difficult to measure the time accurately due to the high speed of light.
In order to enhance the accuracy of determining the time delay between the
transmitting and receiving the laser pulse, another technique is based on the calculation of
the phase difference between the sinusoidal laser signals (the original and the reflected).
The time delay is then indirectly determined. By the phase calculation, it is possible to
obtain stable measurements with minimum influence from the object’s color and
reflectance [24]. This is the same technique utilized by the laser ranging measurement
system adopted in this dissertation.
The laser ranging measurement system (UTM-30LX) adopted in this research
uses the infrared laser with a wavelength of 905 nanometers to scan a 270-degree
semicircular field in a counter-clockwise direction. A notional representation of the
scanning area is shown in Figure 15. The guaranteed range is within 0.1 and 30 meters
(up to 60 meters with degraded performance). The system measures the distance between

17
itself and the objects within this range for each of total 1080 angular steps (1081
measurements) that cover the 270-degree field [25]. By this means, the information
regarding the environment around the laser ranging measurement system can be obtained.
Figure 15. Top view of the notional representation of the scanning area of the UTM-
30LX laser ranging measurement system (from [25]).
According to the specifications of such a system [25], the time taken for
completing the scanning process once is approximately 25 milliseconds (24 ms for
scanning and 1 ms for synchronizing the scan data) not including that for transmitting and
processing the data. This is much shorter than the time taken for the ultrasonic ranging
measurement system to complete the scanning process once (in seconds, depending on
the number of sensor units, and on the distances between the sensor units and the objects).
This is one of the advantages of the laser-based ranging sensors which makes them
superior to the ultrasonic-based ranging sensors. The laser-based ranging sensors
generally have higher resolutions and longer effective ranges as well.
3. Inertial/Magnetic Sensors
The inertial/magnetic sensors (often introduced as the inertial/magnetic
measurement units, IMMUs), such as the 3DM-GX3-25 and the InertiaCube2+ used in

18
this research, are low-cost, high-performance, miniature attitude heading reference
systems (AHRSs) utilizing micro-electro-mechanical systems (MEMS) sensor
technology [26], [27]. Such an IMMU is comprised of triads of orthogonally mounted
accelerometers, angular rate sensors, and magnetometers used to estimate the attitude
(position and orientation) of the moving body to which the IMMU is rigidly attached. It is
often described as a strap-down measurement unit because of this feature.
The strap-down IMMU provides the raw data including the accelerations, angular
rates, and magnetic fields with respect to the IMMU’s body coordinate system. It also
provides the orientation represented in either the Euler angles (the roll, pitch, and yaw
angles) or a quaternion computed by the manufacturer’s proprietary algorithm. The strap-
down IMMUs are widely used in various fields. For example, they may be utilized for the
attitude estimation and stabilization of certain platforms in the field of robotics. They
may also be used as the inertial aiding of the global positioning system (GPS) navigation
of vehicles.
One of the other applications is the personal localization which is briefly
discussed in the next section. This application is especially useful when tracking a
person’s position and orientation in the indoor environment or when the GPS signal
reception is not available.
Another application is the gesture recognition that can be used to build a
locomotion interface for the virtual environment systems. By attaching the strap-down
IMMUs to the user’s head and foot, the user is able to navigate through the virtual
environment by using the natural walking motions. The construction of such a
locomotion interface is introduced in Chapter V.
B. INERTIAL/MAGNETIC SENSOR-BASED PERSONAL LOCALIZATION
One of the approaches to accomplishing personal localization is through
processing the data produced by the IMMUs attached to the person being tracked during
motion. A personal navigation system (PNS) consisting of such IMMUs and a computer
system for processing the sensor data can be constructed to continuously track the

19
person’s position and orientation. The system may also keep a complete history of the
person’s change in position and orientation over time.
The concept of inertial/magnetic sensor-based personal localization is different
from that of automotive navigation that utilizes a GPS. The PNS aims at being self-
contained in the sense that it is able to perform all the functionalities without needing
support from any other system or infrastructure. The desired capability of such a PNS is
to precisely estimate the attitude of the body segment of the person (or user) to which the
IMMUs are attached. For example, by attaching the IMMU to the user’s foot, the foot
attitude during walking motion can be determined.
The PNS using the strap-down IMMUs forms a kind of relative navigation system
where the new position and orientation estimates are computed with respect to the
previous ones. One of the advantages of this type of navigation system is that it does not
require the use of any infrastructure. However, the disadvantage is that the IMMUs are
susceptible to drift errors. The errors tend to grow without bound, which becomes the
primary limitation of this kind of navigation system. The estimates obtained by these
devices need to be further processed by some means of error correction.
The IMMUs generally used in the PNS provide the raw data from their
accelerometers, angular rate sensors, and magnetometers along with the orientation
represented in either the Euler angles (the roll, pitch, and yaw angles) or a quaternion
computed by the manufacturer’s proprietary algorithm. The acceleration measurements of
the IMMUs are represented in their moving body coordinate systems (or body reference
frames). Before these measurements can be effectively utilized, they need to be
transformed and represented in the fixed global coordinate system (or navigation
reference frame) by utilizing the orientation provided by the IMMUs. After the
transformation, the velocity and position estimates of the IMMUs can be determined
simply by integration and double-integration of the acceleration measurements,
respectively. However, as mentioned earlier, the drift errors in the acceleration
measurements need to be corrected by some means. Otherwise, the errors will be
accumulated into the subsequent estimation process of velocity and position.

20
There exists a certain point in the gait cycle where a periodic error correction can
be conducted. A gait cycle consists of a stance phase and a swing phase. The stance phase
of either foot represents the period when this foot is in contact with the ground, while the
swing phase represents the period otherwise. A gait phase detection mechanism [28]‒[30]
is able to distinguish between the stance phase and the swing phase in the gait cycle by
comparing the angular velocity of the foot with a specified threshold. A means to correct
the drift errors in the acceleration estimates is the zero-velocity update (ZUPT)
mechanism used in [28], [29] and [30], which is based on the fact that at the end of swing
phase and in the stance phase, the foot comes to rest on the ground and has a zero
velocity. By incorporating the gait phase detection mechanism to identify this point in the
velocity profile, there is an opportunity to correct the errors accumulated during the
integration of the acceleration estimates. An example of the effect provided by the zero-
velocity update mechanism is shown in Figure 16.
Figure 16. Three components of the velocity (from [28]): velocities obtained by
integrating the original acceleration measurements (left) and obtained by
integrating the drift-corrected accelerations (right).
The strap-down navigation algorithm combined with the zero velocity update
mechanism and the gait phase detection mechanism is shown in Figure 17. The term
is the operator that transforms the acceleration in the body reference frame
into the acceleration in the navigation reference frame by using the quaternion . The
acceleration measurement contains gravity that should be removed to determine the
actual acceleration. The actual acceleration is then integrated to yield velocity given

21
the initial velocity . By comparing the angular velocity with a specific threshold,
the gait phase detection mechanism detects the stance phase and triggers the zero velocity
update mechanism to correct the velocity. The position is obtained by integrating the
corrected velocity given the initial position .
Figure 17. Strap-down navigation algorithm combined with the zero velocity update
(ZUPT) mechanism and the gait phase detection mechanism (from [29]).
There exist errors in the orientation provided by the IMMU manufacturer’s
proprietary algorithm. Since the algorithm is not accessible, it is difficult to cope with the
error issue directly. Another means to obtain more precise orientation information is
needed.
The factored quaternion algorithm (FQA) developed in [31] is suitable for use in
determining the orientation in terms of quaternions for static or slow-moving objects. It
computes three distinct quaternions, each of which is corresponding to the rotation about
one of the principal axes of the navigation reference frame. The final step of the FQA is
to multiply the three principal quaternions to yield a composite quaternion shown as the
following.
. (2.3)
In the FQA, the roll and pitch quaternions are computed from the acceleration
vector measurements, while the yaw quaternion is computed from the magnetic field
vector measurements.

22
A quaternion-based complementary filter developed in [29] and [30] combines the
quaternions computed from the FQA (static branch) with those computed using the
angular rates (dynamic branch). The complementary filter is shown in Figure 18.
Figure 18. Quaternion-based complementary filter (from [29]).
In the quaternion-based complementary filter shown in Figure 18, the dynamic
equation that relates the quaternion estimate to the quaternion rate is shown as
the following.
. (2.4)
where is a skew-symmetric matrix comprised of the angular rate measurements.
. (2.5)
The filter gain is to adjust the weight of either branch used in the final
computation of quaternion estimate . The term is times the difference between
the recent quaternion computed from the FQA and the quaternion estimate
from the previous iteration.

23
The filter gain plays an important role of the complementary filter. As the gain
is decreased, the output will be weighed more by the quaternion derived from the
dynamic branch. As the gain is increased, it will be weighed more by the quaternion from
the static branch (FQA) instead.
An adaptive gain quaternion-based complementary filter developed in [29] and
[30] can adaptively switch the value of complementary filter gain to take advantage of the
nature of the gait phase. That is, in order to obtain better quaternion estimates, the gain
can be switched to a higher value during the stance phase, and switched to a lower value
during the swing phase. This takes into consideration that the foot motion is relatively
static during the stance phase and relatively dynamic during the swing phase.
By combining the strap-down navigation algorithm with the zero velocity update
mechanism, the gait phase detection mechanism, and the adaptive gain quaternion-based
complementary filter, a self-contained inertial/magnetic sensor-based PNS [29], [30] was
constructed as shown in Figure 19.
Figure 19. A self-contained inertial/magnetic sensor-based PNS consisting of the
strap-down navigation algorithm, the gait-phase detection mechanism, and
the adaptive gain quaternion-based complementary filter (from [29]).

24
C. SIMULTANEOUS LOCALIZATION AND MAP-BUILDING
Simultaneous localization and map-building (SLAM) is one of the techniques
used in the field of autonomous mobile robot research. It allows a robot to incrementally
build a consistent map of the physical environment where it operates while
simultaneously estimating its pose (in terms of its position and orientation) within this
map [32]‒[35]. The single map to be built is often called the global map, as opposed to
the several local maps constructed at different locations.
For a robot to build a local map, it uses the onboard sensors (such as ultrasonic,
laser, or other sensors) to scan, collect, and process the information from its surrounding
environment relative to its current location. The local maps are often referred to as the
local scans, which may be represented by any format, but it must be consistent in
illustrating the robot’s surrounding environment at all of the locations where the scans are
taken. For example, point or line-based representations are adopted for particular uses in
this dissertation.
The general concept of SLAM is fairly straightforward. Supposing the
transformation (i.e., the relative rotation and position) of the robot between taking two
scans is known, the map-building process is completed by applying the transformation to
one of the scans and thus allowing this scan to be matched with the other. In other words,
the transformation that relates one robot pose with the other is the very same
transformation for one scan to be matched with the other. If the localization problem can
be solved, so can the map-building problem. However, the robot’s pose is often unknown
or not accurate due to the errors accumulated in the odometry readings. Under this
circumstance, the localization problem may not be solved beforehand, and the
determination of transformation needs to be approached from the other aspect through
solving the map-building problem (i.e., how the scans are matched). This approach
requires determining the correlation between the two scans. Because the two separate
problems are highly coupled, they are often treated as a single one—the SLAM study.
The procedure following the match of two scans in the map-building process is to
merge them into a single scan which serves as a better representation of the robot’s
environment than each original local scan. Therefore, as the robot keeps taking scans

25
along its way, the robot’s trajectory and the global map of the environment can be built
incrementally.
Regardless how the two matched scans merge together, the SLAM study in this
context can be simply referred to as the study of scan matching. However, while the
SLAM concept is simple, to cope with several issues related to the scan-matching process
is more complicated. For example, current algorithms in the literature that determine the
transformation between two scans are innately difficult and environment dependent. The
algorithm suitable for a certain type of environment is not necessarily suitable for
another. Furthermore, there is an accuracy-efficiency trade-off for almost any existing
algorithm, especially for those algorithms that operate in real time. This involves a
sacrifice of scan-matching accuracy for higher efficiency or the other way around,
depending on different requirements and situations. Several examples of researches
seeking improvements in either accuracy or efficiency, as well as in dealing with
different types of environments, are introduced.
In [36] and [37], the local scans are collections of line segments obtained from the
two-dimensional (2D) laser range measurements. The final 2D global geometric map is
generated by the post-processing of the local segment-based scans. The method of
integrating two scans is exclusively based on the geometrical information contained in
the scans to be integrated. In particular, the angles between the pairs of line segments are
considered as a sort of “geometrical landmarks” on which the process is based. In this
way, two angles are considered equal when the angle difference is less than a certain
threshold value. Similarly, two points are considered to coincide when the distance
between the two points is less than some specified threshold value.
In [38], a sonar-based map-building and navigation system was developed for an
autonomous mobile robot to operate in unknown and unstructured environments. The
system uses sonar range data to build a multileveled description of the robot’s
surroundings, where the sonar range data are interpreted using probability profiles to
determine empty and occupied areas. The local maps that consist of the surrounding
occupancy information from multiple points of view are then integrated into a global
sensor-level sonar map used for path planning and navigation.

26
In [39], a sensor model using the probabilistic approach was proposed to translate
range data into grid status information of the local map. The Bayes’ theorem is used to
update the global map. As for the pose of mobile robot, its estimation is conducted by
using the incremental maximum likelihood (ML) scan matching. Both the obstacle
detection and the mapping accuracy were reported to be improved by fusing the range
data obtained from the laser and sonar sensors.
In [40], a fast nonlinear map optimization algorithm was developed to optimize a
map even when the initial estimate of the map is poor. Their approach uses a variant of
Stochastic Gradient Descent on an alternative state-space representation that has good
stability and computational properties.
In dealing with different types of environments (e.g., indoor and outdoor
environments), an adaptive perception system was developed in [41] to determine the
classification of indoor/outdoor operational environments before applying corresponding
systems to implement the SLAM tasks. The operational environment is determined by
using the image classification techniques, by which the image features are extracted from
video imagery and used to train a classification function using supervised learning
techniques. A terrain map that utilized the GPS and inertial measurement unit (IMU) data
is used when operating outdoors, while a 2D laser-based SLAM technique is used when
operating indoors. The global map is generated by first transforming the indoor local map
data into the global reference frame and then combining the transformed indoor local
map data with the outdoor map data.
D. REDIRECTED WALKING
In the applications of virtual environment, one of the main efforts is to provide the
user a higher sense of presence. This can often be achieved by enhancing the graphic and
sound effects. However, this kind of enhancement offers limited improvement if the
user’s physical body is always stationary. To better resolve this issue, another approach is
through building a locomotion interface that allows the user to use real walking motions
to navigate through the virtual environment.

27
Assuming such a locomotion interface is available, there are other issues needing
to be addressed. One of the main issues is that the size of the virtual environment is
limited to the size of the real physical environment, since the user can never walk beyond
the boundaries (walls) of the real physical environment.
Redirected walking is an interactive locomotion technique that captures the
benefits of real walking while extending the possible size of the virtual environments
[42]‒[44].
The way the redirected-walking mechanism works is to rotate the entire virtual
environment about the vertical axis of user’s viewpoint, which indirectly causes the user
to make adjustments in his/her heading direction accordingly in order to follow his/her
path to a certain target location in the virtual environment (assuming that the user has a
path to a certain target location in mind). This kind of scene-rotation-induced heading
direction adjustment prevents the user from walking into obstacles (such as walls) or out
of tracking areas in the real physical environment. Ideally, the rotations injected by the
redirected-walking mechanism may not be perceived by the user.
The scene rotation can be injected without being detected in several kinds of
conditions. These conditions are classified as follows: (1) while the user is standing still,
(2) while the user is turning his/her head or body, and (3) while the user is walking
[42]‒[44].
While the user is standing still, a small baseline virtual environment rotation rate
can be injected and will be either unperceived or perceived as self-motion of the user,
such as turning the head or rolling the eyes that is often done unintentionally in real life.
According to [44], an experimentally determined detection threshold of the baseline
rotation rate is 1.0 deg/sec, which can be correctly detected (the presence and direction of
rotation) by general users 75% of the time. While the user is turning his/her head or body
or while walking, the virtual environment can be rotated even faster so as to steer the user
away from obstacles imperceptibly.

28
A desired result of the redirected-walking mechanism is shown in Figure 20. The
three hypothetical paths that the user could take in the virtual environment are actually to
be steered toward the same target location in the real physical environment. The block
diagram of the redirected-walking mechanism that produces this result is shown in Figure
21.
Figure 20. Desired result of the redirected-walking mechanism. Three hypothetical
paths that the user takes in the virtual environment (right) and the
corresponding paths that the user is actually steered to take in the real
physical environment (left) (adapted and revised from [44]).
Figure 21. Block diagram of the redirected-walking mechanism (adapted and revised
from [42] and [44]).

29
According to Figure 21, the redirected-walking mechanism uses the magnitude of
user’s linear and angular velocities as input parameters to determine the candidates of
rotation rates to be injected into the rotation of the virtual environment. A small baseline
rotation rate is injected even when the user is standing still. The maximum of the three
candidates of rotation rates is chosen and scaled by a direction coefficient, which is
determined by computing the sine of angle between the user’s current heading and the
target location in the real physical environment. Finally, the scaled value is compared
with a certain threshold that is the angular velocity which seemed imperceptible to the
user. If it does not exceed the threshold, it is regarded as the angular velocity to be
injected into the rotation of the virtual environment. Otherwise, it is clamped to the
threshold value.
According to [44], a significant issue with this mechanism is that when the user is
heading directly away from the target location (often the center of the real physical
environment), the system does not steer him/her back toward it. This is because the angle
between the user’s heading and the target location is now 180 degrees, which causes the
direction coefficient equal to zero. Therefore, several additional target locations were
introduced in [44] to resolve this issue. When the user is heading directly away from one
target location, the system automatically selects another that is more convenient for the
redirected-walking mechanism to work.
An additional mechanism proposed in [45]‒[48] is to use some distractors (i.e.,
some things that distract) as a final effort when the user is nearly walking into walls or
out of the tracking area. A distractor appears and causes the user to stop walking and to
turn his/her head back and forth while watching the distractor. Meanwhile, the scene is
rotated to steer the user back towards the target location.

30
E. SUMMARY
This chapter presented the background knowledge useful for understanding the
construction of a locomotion interface for self-contained, portable, and immersive virtual
environment systems.
Several of the sensor techniques were presented. The chapter discussion began
with the ultrasonic sensors since the ultrasonic-based ranging measurement system was
initially considered for gathering the obstacle information from the physical environment
surrounding the user. Because of their greater accuracy and resolution, longer effective
range, and better efficiency, the laser-based ranging sensors were then investigated as the
substitutes for the ultrasonic sensors. The inertial/magnetic sensors were discussed,
recognizing their uses of attitude and motion estimations that are directly related to the
construction of the locomotion interface for virtual environment systems. This
locomotion interface allows the user to navigate through the virtual environment by using
the natural walking motions.
In order to obtain information about the physical environment for subsequent
obstacle avoidance while the user is walking around, two fields of study were considered
as candidates for the approaches to describe the outline of the physical environment
surrounding the user and to determine the location of the user in this environment. The
two fields include: (1) inertial/magnetic sensor-based personal localization, and (2)
simultaneous localization and map-building.
Redirected walking was investigated for providing a mechanism to rotate the
virtual environment to steer the user away from obstacles. This assumes that the required
information regarding the physical environment is always obtained before calculating the
injected angular velocity.

31
III. RANGING MEASUREMENT SYSTEM-BASED MAP-
BUILDING AND LOCALIZATION ALGORITHMS
In this dissertation, the goal is to develop a locomotion interface that allows the
user to use the natural walking motions to navigate through virtual environments. A
means to prevent the user from walking into obstacles (such as walls) needs to be
considered during the development of such a locomotion interface, since the physical
environments in which the virtual environment system operates usually have limited
dimensions. For implementing the obstacle avoidance task, the information constantly
required may be the outline of the physical environments and the relationship between
the user and such environments (i.e., the user’s location in such environments) by
intuition. Therefore, a ranging measurement system is adopted for its functionalities of
determining the distances between the user and obstacles within a certain angular range.
In this chapter, the ranging measurement system-based map-building and localization
algorithms are investigated and further developed as the candidates for providing the
necessary information regarding the physical environments and the user himself/herself.
A. POINT-BASED MAPS
There are various types of representations for describing a 2D map of the
environment in the literature. For example, considering the shapes of different
environments as well as the characteristics of different types of measurement systems,
some may adopt the feature-based representation (e.g., using points, line segments, or
certain shapes) for describing the outline of walls and corners in an indoor environment,
while others may use the occupancy grid-based representation [49], [50] for indicating
whether the space within a square is occupied or vacant in an indoor/outdoor
environment.
The data collected by ranging measurement systems, such as ultrasonic or laser
scanners, typically consist of a set of range measurements. Since the directions of such
range measurements are known, these measurements can be represented as a set of points
in the 2D or 3D coordinate system (either in polar or in Cartesian form). Therefore,
considering this fact, a point-based map containing a set of points is a straightforward

32
representation for the range measurements. Such a map is a geometric description of the
outlines of obstacles surrounding the ranging measurement system (or scanner), and it is
often called a scan. An example of point-based maps (or scans) in the 2D Cartesian
coordinate system is shown in Figure 22. The actual environment for this particular
example is shown in Figure 23.
Figure 22. An example of point-based maps. The ranging measurement system is
located at (0, 0) in the map consisting of a set of 1081 points. The map
was taken in Spanagel Hall (5th floor corridor near the east-side elevators)
of the Naval Postgraduate School.

33
Figure 23. The actual environment for the example shown in Figure 22. The picture
was taken in Spanagel Hall (5th floor corridor near the east-side elevators)
of the Naval Postgraduate School.
B. MATCH OF TWO POINT-BASED MAPS USING THE ITERATIVE
CLOSEST POINT (ICP) ALGORITHM
As the ranging measurement system takes scans consecutively during a level
movement, the map-building and localization processes can be implemented
incrementally by matching and merging the older scan with every newly acquired scan
over time. The scan-matching technique adopted in this research for matching two point-
based maps is the iterative closest point (ICP) algorithm, which was first proposed in
1992 by Besl and McKay [51].
Supposing that there are two sets of points representing two separate scans, the
scan-matching process finds a transformation that best matches one scan with the other.
However, the correspondence between the two scans, which represents how the points
within one scan correspond with the points within the other scan, should be found before
an optimized transformation can be determined. Therefore, the correspondence and the
transformation become the two main issues in the current scan-matching study [52].
The correspondence between two scans often seems fairly simple by human
visual inspection based on our prior experience and knowledge about the features of

34
general environments where the scans may be taken. However, for an automated system,
this becomes a whole new situation. Taking the point-based scans as an example, to find
the correspondence between two sets of randomly positioned points is not a
straightforward task. It may actually be the most difficult step in the scan-matching
problem. Furthermore, in most cases, due to some amount of sensing error, the two point
sets belonging to two separate scans cannot be matched exactly with each other, even if
the ranging measurement system does not move while taking these scans, meaning that
the true correspondence can almost never be found. To resolve this issue, some
assumptions have to be made to determine a correspondence that is close enough to the
truth. The ICP algorithm assumes that the correspondence between the two point sets is
represented by the closest point in one set to each point in the other.
Since the assumption for determining the correspondence may not be accurate, the
transformation calculated based on this correspondence assumption will not be accurate
either. To resolve this, the ICP algorithm alternates between the estimation of
correspondence and transformation until two scans are matched within a threshold.
Supposing that there are two scans, A and B, the ICP algorithm matching (or
aligning) scan A with scan B is implemented by completing the following steps:
For each point in scan A, assign the closest point in scan B as its
corresponding point.
Calculate the transformation (a rotation and a translation) that minimizes
the sum of squared distance between every pair of corresponding points.
Apply the transformation to scan A.
Repeat the first three steps until scan A aligns with scan B or certain
thresholds are reached.
A notional ICP process is shown in Figure 24. As illustrated in Figure 24(1) and
Figure 24(3), the ICP algorithm assumes that each closest point is the corresponding
point although this is often not true. Despite this, the ICP algorithm almost always brings
one scan closer to the other after each iteration. More precisely, the ICP algorithm
guarantees that a local minimum will be reached for the sum of squared distance between
every pair of corresponding points. In some cases, the local minimum reached is also the
global minimum, and the two scans are able to be aligned closely. Frequently, the process

35
can get trapped into one of the local minimums. More detailed information about this
issue and the approaches to resolving it are discussed in the later sections.
Figure 24. A notional ICP process: (1) for each point in scan A, assign the closest
point in scan B as its corresponding point, (2) calculate the transformation
and apply it to scan A, (3) for each point in the transformed scan A, assign
the closest point in scan B as its corresponding point, and (4) calculate the
transformation and apply it to the transformed scan A.
The algorithm to determine the transformation that minimizes the sum of squared
distance between every pair of corresponding points was proposed in [53]. Once the
correspondence between two scans is found, the optimized transformation that best
matches one scan with the other can be determined by using this algorithm, which is
summarized as follows [53].
Suppose that there are two corresponding point sets, and .
, , (3.1)

36
where and are 3D points, and corresponds with for .
,
(3.2)
A transformation that consists of a rotation and a translation is desired to best match
with (or with ). The terms and are the centroids of and , respectively.
,
. (3.3)
The terms and are the point sets determined by referring and to their centroids.
,
. (3.4)
is a matrix whose elements are sums of products of coordinates in with
coordinates in .
, (3.5)
where
,
, (3.6)
and so on. is a real symmetric matrix whose nine independent elements represent
the sums and differences of the nine elements of the matrix .
.
(3.7)
The desired rotation represented by a unit quaternion is to be the eigenvector
corresponding to the most positive eigenvalue of the matrix .

37
. (3.8)
The desired translation is the difference between the centroid of and the rotated
centroid of .
. (3.9)
By applying the transformation to point set , the transformed point set can be
aligned closely with point set .
An example of the scan-matching process using the ICP algorithm is shown in
Figure 25. Ten iterations were taken for the process to reach the threshold, which was for
the improvement of the latest iteration in reducing the mean squared distance between
every pair of corresponding points to be less than 0.001. The result shows that the scan in
blue is closely matched with the scan in red.
The test setup for the process shown in Figure 25 was designed to minimize the
variability due to some outliers that will be discussed in Section C of this chapter, but not
to overly idealize the test condition. The two scans were taken at exactly the same
location but at different points of time to make them similar to each other but innately
different (since no two scans are exactly the same due to random sensing error). Also,
one of the scans (the blue one) was first rotated about its origin by 10 degrees and then
translated by positive 1 meter in x-axis and positive 2 meters in y-axis. Despite how well
the two scans are matched with each other, some small error may still exist in the result,
and this is expected. Note that if only one scan were taken and transformed to make up
the second scan, the final result of scan matching would show that the two scans ideally
match with each other with no error in between because the perfect correspondence
between the two scans exists in this specific case.

38
Figure 25. Scan-matching process using the ICP algorithm for two point-based scans.
The upper figure shows two separate scans in blue and red, respectively.
The lower-left figure shows all of the iterations for the blue scan to
converge toward the red scan. The lower-right figure shows the result.
Both scans consist of a set of 1081 points and were taken in Spanagel Hall
(5th floor corridor near the east-side elevators) of the Naval Postgraduate
School.

39
C. OUTLIER REJECTION FOR THE ICP ALGORITHM
For any two point-based scans to be matched, the point features that exist in one
scan but have no correspondence in the other scan are treated as outliers. A notional
illustration of what the outliers are referred to as is shown in Figure 26. The illustration in
the figure assumes that how the two scans are supposed to be matched is known.
Although this assumption is often not true, it is only intended for making the concept
clearer.
Figure 26. A notional illustration of the outliers. The points that exist in either scan
but have no correspondence in the other are regarded as outliers.
Before discussing the way to identify and reject the outliers, it is important to be
familiar with the effect that the outliers introduce to the scan-matching process and the
reason that an outlier rejection mechanism is needed. As an example shown in Figure 27,
the most apparent effect due to outliers is for the process to be trapped in a local
minimum.

40
Figure 27. Scan-matching process using the ICP algorithm without rejecting the
outliers. The upper figure shows two separate scans in blue and red,
respectively. The blue scan consists of a set of 1047 points, while the red
scan consists of a set of 1081 points. The lower-left figure shows all of the
iterations for the blue scan to converge toward the red scan. The lower-
right figure shows the result. Both scans were taken in Spanagel Hall (5th
floor corridor near the east-side elevators) of the Naval Postgraduate
School.

41
As mentioned earlier, the ICP algorithm determines the transformation that
minimizes the sum of squared distance between each pair of corresponding points after
assuming the closest-point correspondence for every iteration. While the process has
found a local minimum, any transformation determined in its neighborhood during the
subsequent iteration will only make the sum of squared distances larger. Therefore, the
process is regarded as “trapped” in the local minimum. It is also noted that taking more
iterations of the ICP process in this situation will not be helpful for one scan to converge
toward the other but only toward a pose that meets the local minimum. In Figure 27, the
long tail of the scan in blue is apparently a large portion of outliers causing this kind of
issue, because the distance between every point on this tail and its corresponding closest
point in the other scan always gets larger and thus prevents the convergence whenever the
two scans tend to converge. This suggests that the local-minimum issue can be resolved
to a certain degree by rejecting some of the outliers.
There are various techniques in the literature that deal with the outlier issue. For
instance, Phillips, Liu, and Tomasi [54] developed a distance measure called fractional
root mean squared distance (FRMSD). The transformation determined by minimize this
distance value between two scans was reported to be less susceptible to outliers. This was
under the assumption that the points from two separate scans are similar and have a
strong correspondence with each other. In other words, the transformation between two
scans needs to be relatively small, and so is the outlier portion. As the number of outliers
increases, some rejection mechanism is still needed to ensure a successful scan-matching
process.
Rusinkiewicz and Levoy [55] approached the outlier rejection study through
justifying the distance between each pair of corresponding points. Under a similar
assumption that the transformation between two scans is relatively small, each pair of
corresponding points are within a certain distance from each other. The points with their
correspondence found outside a user-specified distance are therefore regarded as outliers
and are rejected. This technique was adopted and tested in the ICP algorithm when our
research initially approached the outlier rejection issue. However, it does not provide a
marked effect, and the process may still be trapped in the local minimum as shown in the

42
example in Figure 27. A more tangible technique is therefore needed to be incorporated
in the ICP algorithm to better cope with this issue.
In [56] and [57], the frustum culling approach was adopted. A frustum represents
the field of view and is defined through this approach. The points that fall outside the
frustum are regarded as outliers and are neglected.
Figure 28. A notional illustration of the portion of outliers to be filtered out. The
portion of scan A that falls outside the angular range of scan B is to be
filtered out. In the figure, the angular range is referred to as the angular
viewing range of scan B from the sensor viewpoint where scan B was
taken, and the sensor (origin) point represents the position of the ranging
measurement system.
Similar to the frustum culling approach, the outlier rejection mechanism proposed
in this research utilizes the angular range of the scan to be matched with. The angular
range mentioned here is referred to as the angular viewing range of the scan from the
viewpoint of the ranging measurement system where the scan was taken. Assuming that
the scan-matching process is to match scan A with scan B as shown in Figure 28, the
portion of scan A that falls outside the angular range of scan B is regarded as the outlier
portion and is filtered out before assigning the correspondence for each ICP iteration.
Note that in order to better explain the concept of the filtering mechanism, the illustration

43
in the figure shows a final scan-matching stage at which the two scans are almost aligned
together and most of the outliers can be identified and filtered out. On the other hand, at
the beginning of the scan-matching process, because the two scans are not yet matched,
there may only be a small portion or none of the outliers being identified. As the process
continues, the outlier portion being identified will increase incrementally. Also, it is
important to point out that the outlier rejection mechanism is only implemented for
finding the correspondence between the two scans and calculating the optimized
transformation for each ICP iteration. The transformation determined is then applied to
all the points in the original scan. There will be no point actually being removed from the
scan.
Figure 29 shows the scan-matching process using the ICP algorithm combined
with the outlier rejection mechanism proposed in this section for the two scans used in
Figure 27. A total of 19 iterations were taken for the process to reach the threshold, which
was for the improvement of the latest iteration in reducing the mean squared distance
between every pair of corresponding points to be less than 0.001. The issue that the
outliers caused for the scan-matching process to be trapped in a local minimum can be
resolved at least to a certain degree (if not for all the cases) by combining this outlier
rejection mechanism. The two scans in the figure are able to be aligned closely with each
other.

44
Figure 29. Scan-matching process using the ICP algorithm combined with the outlier
rejection mechanism proposed in this research. The upper figure shows
two separate scans in blue and red, respectively. The blue scan consists of
a set of 1047 points, while the red scan consists of a set of 1081 points.
The lower-left figure shows all of the iterations for the blue scan to
converge toward the red scan. The lower-right figure shows the final result.
Both scans were taken in Spanagel Hall (5th floor corridor near the east-
side elevators) of the Naval Postgraduate School.

45
D. MERGENCE OF TWO MATCHED POINT-BASED MAPS
The map-building and localization algorithm implemented in this research
features a scan-matching process that matches an older scan with a newly acquired scan.
The older scan mentioned here can represent either a single scan that was taken earlier or
a composition of a series of scans taken so far. For an incremental process that builds the
map and determines the whereabouts of the ranging measurement system that takes scans,
the latter definition is referred to. However, the same process applies to either one.
Therefore, after every completion of the scan-matching process, some means is
needed to merge the two matched scans into a single one. The merging method depends
on the requirements we set for the process, such as the type of implementation (real time
or post processing), and the intended use of the map being built.
Since there is a large overlapped portion between the two matched scans in a
typical continuous scanning process, keeping all of the points when the two scans are
merged into a single one is not efficient. The growth of the number of redundant points
will considerably reduce the efficiency of the subsequent scan-matching process and
prevent it from being implemented in real time. To resolve this issue, a method featuring
the idea of sparse point maps was proposed in [57]. It is intended to avoid duplicate
storage of points by conducting an additional correspondence search and neglecting the
points from one scan that correspond to the same points already existing in the other scan.
A drawback of this method is that the additional correspondence search is time
consuming since it needs to be applied to all points, not a down-sampled subset of points
as often used during each ICP iteration.1
For this research, the merging method consists of several simple rules of how the
two scans are to be merged and is described as follows. A notional illustration of the
merging process following these rules is shown in Figure 30.
Always keep the new scan points. For the application in this research, the
map to be built is mainly used for obstacle avoidance. Therefore, the
accuracy for the portion of the map around the ranging measurement
system carried by the user is more important than that for the portion far
1 Down-sampling the scan points for correspondence search can effectively reduce the time consumption of
each ICP iteration. This will be discussed in Section E of this chapter.

46
away. Since the newly acquired scan is always more accurate as opposed
to the older scan containing a larger accumulated error and thus represents
the environment around the user better, the merging process always keeps
the new scan points.
Discard the points from the transformed old scan that lie within the
overlapped portion of two scans (or within the angular range of the new
scan). For the real-time implementation in this research, the process is
allowed to discard a portion of old information to avoid unlimited growth
of the data amount that slows down the whole process over time.
Therefore, partly following the first rule, the points from the transformed
old scan that lie within the angular range of the new scan become
redundant and need to be removed.
Keep the points from the transformed old scan that lie outside the
overlapped portion of two scans (or outside the angular range of the new
scan). These are the only points from the transformed old scan being kept
since the others were discarded as described in the previous rule.

47
Figure 30. A notional illustration of the merging process. Two matched point-based
scans being merged are shown in (a). Following the merging rules, the
resulting map (scan) is shown in (b). In the figure, the angular range is
referred to as the angular viewing range of the new scan from the sensor
viewpoint where the new scan was taken, and the sensor (origin) point
represents the position of the ranging measurement system.
An example of merging two matched scans following the three simple rules is
shown in Figure 31. In the figure, the scan in red represents the transformed old scan,
while the scan in blue represents the newly acquired scan. The resulting scan in black is
obtained by merging the two matched scans.

48
Figure 31. An example of merging two matched scans following the three simple
rules. The upper figure shows two matched scans. The scan in red
represents the transformed old scan consisting of 1081 points, while the
scan in blue represents the newly acquired scan consisting of 1047 points.
The lower figure shows the resulting scan obtained by merging the two
matched scans. Both scans in the upper figure were taken in Spanagel Hall
(5th floor corridor near the east-side elevators) of the Naval Postgraduate
School. The resulting scan consists of a set of 1242 points.

49
E. REAL-TIME IMPLEMENTATION OF THE POINT-BASED
MAP-BUILDING AND LOCALIZATION PROCESS
Based on the presentation in the previous sections, it is noted that the two separate
processes in this research, map-building and localization, are closely coupled with each
other, and can be combined and treated as one single process. The incremental process
for point-based map-building and localization in this research usually starts with the first
scan taken by the ranging measurement system. The first scan is regarded as the original
old scan. (It should be noted that a known map built beforehand can also be adopted as
the original old scan, as long as it has the same representation as the one used in this
process. In such a point-based process, it needs to be a point-based map.) For every new
scan acquired, the process cycle completes the following two steps:
Match the old scan with the newly acquired scan using the ICP algorithm.
Merge the two matched scans into one single scan, which in turn becomes
the newer old scan.
As the process matches the current old scan with the newly acquired scan, the
transformation for the old scan to be matched with the new scan is determined at the
same time. Such transformation at the end of the cycle consists of a rotation
(represented by a unit quaternion) and a translation (represented by a 3D vector). The
orientation and position of the ranging measurement system after the completion
of the current ( ) process cycle relative to its initial orientation and position can
be determined as follows.
,
. (3.10)
The orientation and position are represented by a unit quaternion and a 3D vector,
respectively. The subscript represents that it is the process cycle, and the
superscript * represents the complex conjugate of the given quaternion. The operation
shown in the equations is the quaternion multiplication. Note that the following values
are adopted for the initial orientation and position .
,
. (3.11)

50
The absolute initial orientation and position values may be applied instead. In this case,
the terms and will be representing the absolute values as well.
After the two matched scans are merged, the resulting scan obtained at the end of
current cycle is represented in a coordinate relative to the current orientation and position
of the ranging measurement system (i.e., represented in the ranging measurement
system’s coordinate). However, since the orientation and position of the ranging
measurement system are known, the coordinate system of the scan can be converted into
the one relative to the initial orientation and position of the ranging measurement system,
if needed. This can be completed simply by applying a rotation (with the same value as
the orientation ) and a translation (with the same value as the position ) to all of the
points in the resulting scan.
A general concept of real-time implementation is often referred to as an algorithm
that is able to be implemented to process the raw sensor data as they are gathered without
the need of any buffering mechanism. The process introduced in this chapter takes a new
scan of the environment and conducts scan matching (and merging) between the old and
new scans for each process cycle. It is considered real-time if it is able to be implemented
continuously while the ranging measurement system is moved. Since the moving speed
of the system is as low as humans’ normal walking speed, it is thus reasonable for the
real-time process to allow one to two seconds on average for each of the process cycles.
Note that the time taken for the process to take a new scan is in tens of milliseconds,
which is negligible as compared with that to complete scan matching and merging.
For the real-time implementation of the point-based map-building and localization
process, the process efficiency is the main issue that needs to be addressed. In other
words, the time consumption for each process cycle needs to be reduced so that it
operates reasonably fast for the real-time implementation. It is noted that the most time-
consuming portion in current process cycle is the portion in the ICP algorithm that
searches for the correspondence between the two scans being matched.
When a brute-force method is used, the way of searching for the closest-point
correspondence will be to calculate and compare all of the squared distances from all of
the points in the newly acquired scan to each point in the old scan. In this way, if the

51
numbers of points in the old scan and the newly acquired scan are and respectively,
the complexity of this search for each ICP iteration of the process cycle will be ,
which is fairly computationally expensive for scans with large sizes.
In dealing with the complexity issue, a method utilizing a tree-search technique
(called K-D tree) was proposed by Maneewongvatana and Mount [58] in 1999. By
incorporating this method to the ICP algorithm, searching for the closest points among a
set of points can be implemented more efficiently. The general idea of the K-D tree is to
form the data points into a binary tree, each of whose nodes specifies an axis and splits
the points based on their coordinates along that axis. The method constructs a K-D tree
structure for the points of the newly acquired scan. During each ICP iteration, the process
searches for the closest point within this K-D tree to each point in the old scan. The
complexity for each closest-point search is if there exist points in the newly
acquired scan. For the old scan containing points, the complexity for the complete
correspondence search is, therefore, , which turns out to be less
computationally expensive than the brute-force method. Note that the complexity of
constructing the K-D tree is . It only needs to be completed once during each
process cycle.
Despite the improvement in efficiency obtained through the use of the K-D tree
search method, the time consumption of each process cycle is often still too high for the
process to be implemented in real time, especially when the sizes of the two scans to be
matched are large. Therefore, in addition to the K-D tree-search method, some other
means is still needed to reduce the computational load of the correspondence search. The
approach adopted in this research is to down-sample the old scan by some number at the
beginning of every ICP iteration to reduce the number of points in the old scan
participating the correspondence search. This resolves the efficiency issue to a certain
degree. However, down-sampling the old scan may also reduce the scan-matching
accuracy if the remaining point features cannot offer enough information for the process.
This may also increase the chance for the scan-matching process to be trapped in a local
minimum and thus extra care should be taken. As mentioned earlier, there is always an

52
accuracy-efficiency trade-off for almost all of the existing algorithms. This is one of the
situations in which a trade-off should be determined.
An example for one of the map-building and localization process cycles is shown
in Figure 32. In this particular case, a comparison is made to show the time consumption
of the map-building and localization process with different correspondence search
methods and setups incorporated into the ICP algorithm. The comparison is shown in
Table 1. It is noted that the time consumption for the process can be reduced so that it can
be implemented in real time by down-sampling the old scan and incorporating the K-D
tree correspondence search method into the ICP algorithm. Note that while the threshold
value is specified as the improvement of the latest iteration in reducing the mean squared
distance between every pair of corresponding points, adopting a larger threshold value
can reduce the time consumption as well. However, this will directly degrade the scan-
matching accuracy and will not be emphasized in this research.

53
Figure 32. An example of the map-building and localization process cycle. The
upper-left figure shows two separate scans. The one in red is the old scan
consisting of 1081 points, and the one in blue is the new scan consisting of
1047 points. The upper-right figure shows all of the iterations for the old
scan to converge toward the new scan. The lower figure shows the
resulting scan obtained by merging the two matched scans. Both scans in
the upper-left figure were taken in Spanagel Hall (5th floor corridor near
the east-side elevators) of the Naval Postgraduate School. The resulting
scan consists of a set of 1242 points.

54
Table 1. A comparison in time consumption of map-building and localization
process with different correspondence search methods and setups
incorporated into the ICP algorithm (for a particular case the same as in
Figure 32). The program was implemented by using the Python script
language and executed on a laptop with an Intel Core i7 2.20GHz
processor. The code in the program is not optimized, and the value
produced is only intended for an approximate comparison.
Methods Incorporated # of Iterations Time (Seconds)
Brute-force method 19 127.49573576200
K-D tree method 19 10.70492927460
Down-sampling the old scan by 20 + K-D tree method 20 1.13340847026
Threshold ( ):
Improvement of the latest iteration in reducing the mean squared distance between every pair of corresponding points <= 0.000025
An example of the real-time point-based map-building and localization process
introduced up to this point is shown in Figure 33. The ranging measurement system was
moved approximately in a rectangular loop (i.e., moved alternately between moving
forward and turning left until back to the start position). The point set in blue represents
the map of the environment, while the point set in red shows the trajectory of the ranging
measurement system, which indicates the locations where the scans were taken. The map
was built by consecutively matching and merging the scans taken by the ranging
measurement system as it was moved. The coordinates of the map are relative to the
initial position and orientation of ranging measurement system that follow the north-east-
down (NED) coordinate system. In our specific case representing the 2D map, a
coordinate system consisting of only the north and east axes (x and y) is used instead. A
picture of the actual environment taken from the lower-right corner in the map is shown
in Figure 34.
As being observed in Figure 33, it is difficult to tell the estimation error for the
transformation from the final map. However, it can be reflected by the estimated
trajectory of the ranging measurement system. Although the actual initial and final
positions were exactly the same, the estimation result still shows that there is a large error
between the initial and the final positions. This is due to the errors accumulated during

55
the estimation of transformation in each of the scan-matching processes. Some other
means is still needed to effectively deal with this issue in a sense that either the innately
unbound error can be greatly reduced or it can be bound.
Figure 33. An example of the real-time point-based map-building and localization
process. The point set in blue represents the resulting map of the
environment, while the point set in red shows the trajectory of the ranging
measurement system. The map consisting of 1473 points was built by
matching and merging 81 individual scans. The coordinate system of the
map is relative to the start position and orientation of ranging
measurement system. Although the actual initial and final positions were
both (0, 0), the estimation result shows that the initial position (0, 0) and
the final position (-1.15098078202, -0.874567350456) do not match due
to the errors accumulated during each of the scan-matching processes. The
test was implemented in an indoor basketball court of Miami University in
Oxford, Ohio.

56
Figure 34. The actual environment for the process shown in Figure 33. It is an indoor
basketball court of Miami University in Oxford, Ohio.
F. LINE-BASED REPRESENTATION FOR THE ORIGINAL POINT-BASED
MAPS
1. Motivation
The point-based representation is able to sufficiently describe the outline of the
environment where the ranging measurement system operates as shown in several of the
previous examples. However, as a means of dealing with the issue of a large accumulated
estimation error, some other type of representation is also worth considering in a sense
that it may provide better information than the original point-based map for correcting the
error to a certain degree.
The line-based representation that uses line segments to describe the outlines of
environments is adopted in this research, based on the following reasons:
The outlines of most indoor environments from the top view can often be
described by a set of 2D line segments.
Line segments are better able to represent boundaries (e.g., walls) than
points. For point-based representation, it is unknown whether the space
between any two adjacent points is vacant or not.

57
The use of line segments is computationally more efficient than points,
since each line segment is able to represent all those points through which
it goes.
When implementing the scan-matching process using the ICP algorithm,
instead of including all of the points from the original point-based scan,
adopting the start and end points of each line segment from the converted
line-based scan is a means to a better efficiency, since this indirectly but
systematically down-samples the original scan for each ICP iteration.
Built on top of the ICP algorithm, some mechanism utilizing the line
features is expected to correct the estimation error for the transformation
in each of the scan-matching process.
2. Hough Transform
One of the basic techniques that utilize the line features is the Hough
transform [59]. The basic idea is summarized as follows.
As shown in Figure 35 (a), a straight line in the 2D coordinate system can be
described by the following equation.
. (3.12)
where is the slope parameter, and is the intercept parameter.
The line is thus represented by the parameters ( , ). One issue of this
representation is that it is not stable. When the line gets horizontal, the values of and
become infinite. To resolve this, a more useful representation is used.
As shown in Figure 35 (b), the same straight line can also be described by using
the range and the bearing . The range is the distance between the origin and the line,
while the bearing is the angle of the vector from the origin to its closest point on the
line.
. (3.13)
Assuming that two points ( , ) and ( , ) on the straight line are known, the bearing
and the range can be calculated as follows [60].

58
(3.14)
. (3.15)
Therefore, the line can be represented by a unique point in the - parameter
space (i.e., in the Hough transform) as shown in Figure 35 (c). A useful concept of using
this representation for lines is that when two or more points in the - parameter space
are close enough to one another, they can be described approximately by the same
straight line in the - space.
Figure 35. A straight line represented in different coordinate systems: (a) Cartesian
coordinate system, (b) Cartesian coordinate system, and (c) - parameter
space (polar coordinate system).

59
3. Conversion of Point-Based Maps into Line-Based Maps
As mentioned earlier, the data collected by the ranging measurement system
consist of a set of range measurements. Since the directions of such range measurements
are known, these measurements can be represented as a set of points in the 2D or 3D
coordinate system. A point-based map containing a set of points is therefore a fairly
straightforward representation for such range measurements. However, a line-based
representation is considered to further deal with the issue that may not be directly handled
as a point-based map is used. It is thus necessary to convert the original point-based map
into a line-based map.
Given a point-based map that consists of a set of points, the steps for building a
line-based map are as follows. A notional illustration is shown in Figure 36.
Connect any two consecutive points by a line segment if they are close
enough to each other to represent a portion of the boundary. A distance
threshold can be specified to decide whether the space between any two
consecutive points should be left vacant. Each of the line segments has the
following attributes: the start and end points, the bearing , the range ,
and the line length.
Examine the - parameter space of any two adjacent line segments to
determine whether the points they represent are close enough to be
combined, and keep track of these line segments. A distance threshold can
also be specified. Clusters of points that are closer to one another than the
threshold value in the - parameter space represent sets of line segments
to be combined and approximated by a common line segment for each set.
For every set of line segments to be approximated by a common line
segment, extract the original points corresponding to the line segments and
compute the least square line segment that fits these points. All of the
resulting least square line segments will replace the original line segments
for representing the line-based map.
An example of converting a point-based map into a line-based map is shown in
Figure 37. The upper figure shows the original point-based map while the lower figure
shows the converted line-based map. The lengths and the number of line segments in the
resulting line-based map depend on the threshold we set for the original short line
segments to be combined and approximated by a common line segment. The threshold
value specified in this research is the upper bound of the distance between any two points
(1.0 for this particular example) in the - parameter space being considered short

60
enough for the two points to be regarded as a single one. If any two points are closer to
each other than this distance, they represent the same line in the - space. It is noted that
representing the same map by using line segments can greatly reduce the space needed
for storing and maintaining the map, since each line segment can replace a certain
number of the original points.

61
Figure 36. A notional example for steps of converting a point-based map into a line-
based map.

62
Figure 37. An example of converting a point-based map into a line-based map. The
upper figure shows the original point-based map consisting of 1047 points.
The lower figure shows the converted line-based map consisting of 175
line segments. The scan was taken in Spanagel Hall (5th floor corridor
near the east-side elevators) of the Naval Postgraduate School.

63
G. REAL-TIME IMPLEMENTATION OF THE LINE-BASED MAP-
BUILDING AND LOCALIZATION PROCESS
1. Match of a Line-Based Map with a Point-Based Map using the ICP
Algorithm
The process for the line-based map-building and localization is to build a line-
based map incrementally and to estimate the transformation at the same time during the
implementation of scan matching. Since every newly acquired scan is represented by a
set of points (i.e., a point-based map), it is thus necessary to match the old line-based map
with the newly acquired point-based map.
Since the line-based map containing a set of line segments can be easily converted
into a point set by extracting the start and end points from each of the line segments, the
ICP algorithm used for matching two point sets can therefore be adopted for the scan-
matching process between a line-based map and a point-based map. Because of the
significantly reduced number of points in the line-based map, the efficiency for the ICP
process is expected to be better than originally matching two point-based maps. The steps
for matching a line-based map with a point-based map are as follows.
Extract the start and end points from each of the line segments in the line-
based map to form a point set.
Match the point set with the newly acquired point-based map using the
ICP algorithm.
Apply the transformation calculated during matching the point set with the
point-based map to the line-based map.
An example of matching a line-based map with a point-based map is shown in
Figure 38. The map in blue represents the point-based map while the map in red
represents the line-based map. Using the same raw sensor measurements as in this
particular example, a comparison is made to show the time consumption while
implementing two different types of scan-matching processes. One is to match two point-
based maps, while the other is to match a line-based map with a point-based map. Both
cases are implemented without down-sampling the maps for each correspondence search.
The comparison is shown in Table 2. It is noted that matching a line-based map with a
point-based map is more efficient than matching two point-based maps. For real-time
implementation, the time consumption for both cases can be further reduced by applying

64
appropriate down-sampling to the maps for the correspondence search of each ICP
iteration.
Figure 38. An example of the ICP scan-matching process that matches a line-based
map with a point-based map. The map in blue represents the point-based
map consisting of 1047 points. The map in red represents the line-based
map consisting of 316 line segments. The upper-left figure shows the
initial poses of the two maps. The upper-right figure shows all of the
iterations for the line-based map to converge toward the point-based map.
The lower figure shows the end of the last iteration of the convergence.
The original scans were taken in Spanagel Hall (5th floor corridor near the
east-side elevators) of the Naval Postgraduate School.

65
Table 2. A comparison in time consumption of the process while matching two
different types of maps with a point-based map without applying down-
sampling to the maps for the correspondence search of each ICP iteration.
The raw measurements used for both setups are the same as the example
shown in Figure 38. The program was implemented by using the Python
script language and executed on a laptop with an Intel Core i7 2.20GHz
processor. The code in the program is never optimized, and the value
produced is only intended for giving a rough concept.
Scan-matching map type # of Iterations Time (Seconds)
Matching two point-based maps 19 10.7217815053
Matching a line-based map with a point-based map 23 7.81693578522
Threshold ( ):
Improvement of the latest iteration in reducing the mean squared distance between every pair of corresponding points <= 0.000025
2. Line Feature-Based Transformation Correction
As discussed in Section E of this chapter, the issue associated with the point-
based map-building and localization process is that the estimation error is cumulative.
For the line-based process, the issue still exists since the same ICP algorithm is used. It is
noted that adjusting certain threshold values for the process to take more ICP iterations
can lead to a better scan-matching accuracy. In this way, the overall error accumulated
during the process can be reduced to a certain degree. However, more iterations also
cause greater time consumption but only provide limited improvement. Some other
means should still be considered.
A mechanism that utilizes the line features (with the attributes such as the bearing
and the range ) is proposed in this research to correct the transformation between two
line-based maps. This is one of the reasons that the line-based representation for maps is
adopted in this research.
Assuming two line segments A and B correspond to each other (as shown in
Figure 39), to align the line extending segment A with the line extending segment B,
there are two steps to be followed.
Rotate segment A about the origin by an angle of .
Translate segment A by , where

66
, . (3.16)
The unit quaternion to perform the required rotation is given by
. (3.17)
Figure 39. Two corresponding line segments in a - coordinate system.
To correct the transformation between two line-based scans, the line feature-based
correction mechanism can be implemented by aligning the pair of corresponding line
segments determined from the two separate scans. For a better alignment, the same
process needs to be completed for two or more times using different corresponding pairs
that are not in parallel with one another. This method assumes that the corresponding pair
between two scans can be found. However, determining the correspondence correctly is
difficult, and adopting an incorrect one will only worsen the original alignment error
between the two scans. This is the reason that the correction mechanism will be built as
an extension of the ICP algorithm. While the two scans are nearly matched after the
completion of ICP algorithm, the corresponding pairs can be determined by justifying the
differences in the line features of the two scans, such as the lengths, the ranges, the
bearings, and the mid-point positions. The estimation error for the transformation
between the two scans can thus be reduced.

67
The determination of corresponding pairs between two line-based scans (for
example, scans X and Y) in the line feature-based transformation correction mechanism
is conducted by completing the following steps.
Extract the 10 longest line segments from scan X.
For each of the 10 longest line segments in scan X, extract the line
segment from scan Y that has the smallest length difference as its
corresponding line segment.
Verify each of the 10 corresponding pairs by examining whether the
following conditions are met.
Both of the corresponding line segments are longer than 2 meters.
The difference between the lengths of the corresponding line
segments is smaller than 1 meter.
The difference between the ranges (i.e., and as shown in
Figure 39) of the corresponding line segments is smaller than 1
meter.
The difference between the bearings (i.e., and as shown in
Figure 39) of the corresponding line segments is smaller than 0.4
radians.
The distance between the mid-points of the corresponding line
segments is shorter than 0.5 meters.
Note that it is possible that no corresponding pair is found. The number of line
segments to be extracted and the threshold values can be adjusted to meet the needs of
matching difference scans. The values adopted in this dissertation are solely intended for
examining the feasibility of the transformation correction mechanism. They may not
necessarily be optimal.
An example of the result of combining the ICP algorithm with the line feature-
based transformation correction mechanism is shown in Figure 40. The upper figure and
lower figure show the results before and after using the correction mechanism,
respectively. One pair of the corresponding line segments is determined. The small
alignment error between the red scan and the blue scan in the upper figure can be
corrected by applying the line feature-based transformation correction mechanism. Note
that before the line feature-based transformation correction mechanism is implemented,
the point-based map needs to be converted into a line-based map. The lower figure that

68
shows the convergence of the line-based map and the point-based map instead of two
line-based maps is only intended for an easier comparison with the upper figure.
Figure 40. An example of the result of combining the ICP algorithm with the line
feature-based transformation correction mechanism. The upper figure and
lower figure show the results before and after using the correction
mechanism, respectively. The small alignment error between the red scan
and the blue scan in the upper figure can be corrected by applying the line
feature-based transformation correction mechanism. The original scans
were taken in Spanagel Hall (5th floor corridor near the east-side elevators)
of the Naval Postgraduate School.

69
3. Real-time Map-building and Localization using the Combination of
the ICP Algorithm and the Line Feature-based Transformation
Correction Mechanism
The incremental process for line-based map-building and localization in this
research is to build and maintain a line-based map while simultaneously localizing the
ranging measurement system. This process begins with an initial point-based scan that is
then converted into a line-based one and treated as the original old scan. (Note that a
known map built beforehand can also be adopted as the original old scan, as long as it can
be converted into a line-based map.) For every subsequent new point-based scan acquired,
the process cycle completes the following steps.
Match the old line-based scan with the newly acquired point-based scan
using the ICP algorithm.
Convert the newly acquired point-based scan into a line-based scan.
Correct the transformation of the transformed old line-based scan to better
match with the new one using the line feature-based transformation
correction mechanism if the corresponding line segments among the two
scans can be determined.
Merge the two matched line-based scans into a single line-based scan
using the same concept as adopted in Section D of this chapter for
merging two point-based scans. The resulting line-based scan is regarded
as the newer old scan for the next process cycle.
The estimation for the transformation (i.e., the orientation and position) of the
ranging measurement system at the end of each process cycle can be implemented using
the same formula as discussed in Section E (Equation 3.10) of this chapter.
An example of the post-processed line-based map-building and localization is
shown in Figure 41. It is intended for investigating the performance in terms of
estimation accuracy in comparison with the point-based process as shown in Figure 33.
The process adopts the same ICP threshold value and is fed with the same raw sensor
data. As mentioned earlier, it is difficult to tell the estimation error from the final map.
Instead, it can be reflected by the estimated trajectory of the ranging measurement system.
Judging by the distances between the estimated initial and final positions for the point-
based and line-based processes, the line-based process proposed in this section performs
relatively better because the accumulated estimation error can be reduced.

70
Since the line-based map-building and localization process is relatively more
efficient than the point-based process, there is some leeway in trading efficiency for
higher accuracy. By adopting a lower threshold value for the ICP algorithm, the process
can reach higher accuracy and still be suitable for the real-time implementation. An
example of the process applied with such adjustment and fed with the same raw sensor
data used in the previous example is shown in Figure 42. It is noted that the estimation
accuracy is enhanced since the distance between the estimated initial and final positions
is reduced.
An example of the real-time line-based map-building and localization process is
shown in Figure 43. To examine the estimation accuracy of the process, an infrared
precision position tracker (PPT) system2 [61] is used to concurrently estimate the position
of the ranging measurement system. The PPT measurement was reported to have an
overall root-mean-square (RMS) error in centimeters (6.68 cm, to be exact) and thus is
regarded as the ground truth. A comparison of the trajectories of ranging measurement
system obtained by using both the real-time, line-based map-building and localization
process and the PPT system is shown in Figure 44. The comparison indicates that the
proposed process offers high accuracy, since the two trajectories closely coincide with
each other. (In this example, the RMS error of the trajectory determined by the real-time,
line-based map-building and localization process relative to the one determined by the
PPT system is approximately 0.07 meters.) Note that the points in time at which the
measurements are taken for both approaches are not necessarily the same. This is the
reason that the points from the two trajectories do not sit exactly on top of each other.
2 The test facility used is an indoor basketball court, which is also the huge immersive virtual environment
(HIVE) equipped with an infrared precision position tracker (PPT) system at Miami University in Oxford, Ohio.

71
Figure 41. An example of the line-based map-building and localization process using
the combination of the ICP algorithm and the line feature-based
transformation correction mechanism. To show the performance in terms
of estimation accuracy in comparison with the point-based process as
shown in Figure 33, a post process with the same threshold value for the
ICP algorithm is implemented and fed with the same raw sensor data. The
line set in different colors represents the resulting map of the environment,
while the point set in red shows the trajectory of the ranging measurement
system. The map consisting of 648 line segments was built by matching
and merging 81 individual scans. Although the actual initial and final
positions were both (0, 0), the estimation result shows that the initial
position (0, 0) and the final position (-0.841606400882, - 0.528697346803)
do not match due to the error accumulated during each of the scan-
matching processes. The original test was implemented in an indoor
basketball court of Miami University in Oxford, Ohio.

72
Figure 42. An example of the line-based map-building and localization process using
the combination of the ICP algorithm and the line feature-based
transformation correction mechanism. The same raw sensor data used in
the example shown in Figure 41 are adopted. A lower threshold value of
the improvement in reducing the mean squared distance between every
pair of corresponding points for the ICP algorithm is adopted for a higher
performance in terms of estimation accuracy. The line set in different
colors represents the resulting map of the environment, while the point set
in red shows the trajectory of the ranging measurement system. The map
consisting of 648 line segments was built by matching and merging 81
individual scans. The actual initial and final positions are both (0, 0). The
estimates for initial and final positions are (0, 0) and (-0.327111495504, -
0.533314961374), respectively. The original test was implemented in an
indoor basketball court of Miami University in Oxford, Ohio.

73
Figure 43. An example of the real-time line-based map-building and localization
process using the combination of the ICP algorithm and the line feature-
based transformation correction mechanism. The line set in different
colors represents the resulting map of the environment, while the point set
in red shows the trajectory of the ranging measurement system. The map
consisting of 846 line segments was built by matching and merging 106
individual scans. The actual initial and final positions are both (0, 0). The
estimates for initial and final positions are (0, 0) and (-0.348965542645, -
0.071385533758), respectively. The test was implemented in an indoor
basketball court of Miami University in Oxford, Ohio.

74
Figure 44. A comparison of the trajectories of ranging measurement system. The
trajectory in red is estimated by implementing the real-time line-based
map-building and localization process, while the trajectory in blue is
estimated by using the infrared precision position tracker (PPT) of the
huge immersive virtual environment (HIVE) [61]. The HIVE is located in
an indoor basketball court of Miami University in Oxford, Ohio. The RMS
error of the trajectory determined by the real-time, line-based map-
building and localization process relative to the one determined by the
PPT system is approximately 0.07 meters.

75
H. LOCAL MINIMUM ESCAPE MECHANISM FOR THE ICP
ALGORITHM
As discussed in Section C of this chapter, the ICP algorithm almost always
guarantees bringing two scans closer to a local minimum. This local minimum may
ideally be the global minimum most of the time. It is noted that rejecting a portion of
outliers can effectively prevent the process from being trapped in one of the many local
minima. However, even when the outlier rejection mechanism is applied, the local
minimum issue can still occur occasionally. As shown in Figure 45, when the process is
trapped in a local minimum, the two scans will never coincide with each other no matter
how many ICP iterations the process takes.
There are various techniques that approach the optimization (maximization or
minimization) problem in the literature. Most of them need to face the similar local
optimum issue.
For example, a greedy-based algorithm, such as hill-climbing [62], is a
mathematical optimization technique that begins with an (arbitrary) solution to a problem
and iteratively finds a better solution by incrementally making a small change to the
solution. The ICP algorithm used in our research is similar to the greedy-based algorithm,
which is usually efficient and guarantees finding a local optimum. However, this also
raises an issue because the local optimum is not necessarily the global optimum.
Simulated annealing (SA) [63], with its idea inspired by the annealing process in
metallurgy, is used to determine an acceptable approximation of the global optimum
within a given fixed amount of time. With this technique, the process is able to escape the
local optimum by allowing some solutions that are equal to or worse than the current
solution but gradually decreasing the probability of allowing them as the process goes
toward the finish time.
It is also possible for the greedy-based algorithm to escape the local optimum.
There are generally two methods:
Specify a random initial condition for a process restart.
Apply a random amount of sideway move.

76
Figure 45. An example of the ICP scan-matching process that is trapped in a local
minimum. The process matches a line-based scan with a point-based scan.
The scan in blue represents the point-based scan consisting of 1014 points.
The scan in red represents the line-based scan consisting of 488 line
segments. The upper figure shows two individual scans. The lower left
figure shows all of the iterations for the line-based scan to converge
toward the point-based scan. The lower right figure shows the end of the
last iteration of the convergence. The two scans were taken in an indoor
basketball court of Miami University in Oxford, Ohio.
Both of the methods are suitable for use in the ICP process. A random (or user-
specified) amount of rotation serving as the combination of the two methods can be
applied for the ICP process to escape the current local minimum. To incorporate this
mechanism in the ICP algorithm, the process cycles through the following steps:

77
Implement the ICP iterations until the threshold is reached.
Determine whether the process is trapped in a local minimum by
examining the mean distance between every pair of corresponding points.
Apply a random (or user-specified) rotation to the scan being matched
with the other scan if the process is trapped in a local minimum. The
direction of such rotation will be the same as the rotation during the
previous ICP iteration.
Restart the process and implement the ICP iterations until the threshold is
reached.
Figure 46 shows the result of the ICP scan-matching process combined with the
local minimum escape mechanism for matching the same scans shown in Figure 45.

78
Figure 46. An example of the ICP scan-matching process combined with the local
minimum escape mechanism. The process matches a line-based scan with
a point-based scan. The scan in blue represents the point-based scan
consisting of 1014 points. The scan in red represents the line-based scan
consisting of 488 line segments. The upper left figure shows two
individual scans. The upper right figure shows all of the iterations for the
line-based scan to converge toward the point-based scan. The lower figure
shows the end of the last iteration of the convergence. The two scans were
taken in an indoor basketball court of Miami University in Oxford, Ohio.
I. LIMITATIONS
The ranging measurement system-based map-building and localization process
proposed in this chapter can be effectively implemented under the following assumptions
and limitations:
Between every two consecutive scans, a sufficient portion must overlap to
guarantee successful scan matching. This offers the scan-matching process

79
enough correspondence information between the two scans being matched.
In other words, the transformation between every two consecutive scans is
assumed to be small. For instance, it is recommended that the magnitude
of rotation be less than 45 degrees, and that the norm of translation be less
than 10 meters.
Partly following the previous assumption, the velocity of the ranging
measurement system during the implementation of the process needs to be
as low as humans’ normal walking speed to keep the transformation
between two consecutive scans small. In addition, it takes some duration
of time for the ranging measurement system to measure the ranges from its
environment in a counter-clockwise manner. The scan will be skewed if
the ranging measurement system is moving during scanning. This is
another reason that the velocity needs to be kept low to reduce the
skewing effect.
The dimensions of the environment need to be in accordance with the
effective range of the ranging measurement system. For a large open space
with boundaries beyond the effective range of the system, there will be
little or no correspondence between scans for matching, and thus it is not
suitable for the use of our process. In addition, a space that is narrow and
long, such as a corridor, is not suitable either. The only features that the
process is able to determine from the scans are two parallel walls. Both
ends of the corridor are invisible due to the insufficient effective range of
the system and the large incident angles of the laser or ultrasonic waves.
Under this circumstance, it is difficult for the process to estimate the
relative translation between scans. An example of the scan-matching
process for such a corridor environment is shown in Figure 47. The actual
environment for this particular example is shown in Figure 48.
There are certain conditions under which the process does not operate well
because the first assumption is not met, even when the transformation between two
consecutive scans is small. For example, when the ranging measurement system moves
from one space into another through a small passage (e.g., a doorway), the scans taken
before and after passing through the doorway may contain little correspondence and thus
are not able to be properly matched. A similar situation may occur when moving around a
corner, because there may be too much new information being gathered around the corner
relative to the old information in the newly acquired scan.

80
Figure 47. An example of the scan-matching process for a corridor environment. The
process matches a line-based scan with a point-based scan. The scan in
blue represents the point-based scan consisting of 1035 points. The scan in
red represents the line-based scan consisting of 252 line segments. The left
figure shows two individual scans before being matched, while the right
figure shows the end of the last iteration of the convergence. It is noted
that the scan-matching result has large error along the direction parallel to
the walls. The scans were taken in Spanagel Hall (5th floor corridor) of the
Naval Postgraduate School.

81
Figure 48. The actual environment for the example as shown in Figure 47. The
picture was taken in Spanagel Hall (5th floor corridor) of the Naval
Postgraduate School.
J. SUMMARY
This chapter presented a ranging measurement system-based map-building and
localization algorithm. It started with the investigation of the point-based map-building
and localization process using the well-known ICP algorithm. The ICP algorithm always
guarantees bringing two scans being matched closer toward a local minimum. However,
the local minimum is not necessarily the global minimum being sought. To deal with the
local minimum issue often caused by the outliers, a mechanism that rejects a portion of
the outliers was incorporated during each of the ICP iterations. For the real-time
implementation, a tree-search technique and a down-sampling mechanism were adopted
for executing the correspondence search to reduce the time consumption of the process.
Although the point-based map-building and localization process is able to produce
acceptable results, there are still efficiency and accuracy issues that need to be addressed.
The line-based representation for the map being built was adopted to reduce the time
consumption of the process. Furthermore, a line feature-based transformation correction
mechanism was constructed to correct the alignment error between two matched scans.

82
The resulting line-based map-building and localization process performs relatively better
than the original point-based process.
Finally, the approaches to escaping the local minima were discussed. Although
the local minimum issue can be resolved to a certain degree by rejecting some of the
outliers, the scan-matching process can still be trapped in one of the local minima
occasionally. Therefore, a local minimum escape mechanism was incorporated in the
process to further resolve this issue.
The main contributions of this chapter are listed as follows:
An investigation was conducted to present the performance difference
between the point-based and line-based map-building and localization
process using the ICP algorithm.
An outlier rejection mechanism was incorporated in the ICP algorithm to
improve the scan-matching result so that the local minimum issue caused
by the outliers can be resolved to a certain degree.
A mechanism that utilizes the Hough transform was constructed to
approximate the original point-based map by a set of line segments.
A line feature-based transformation correction mechanism was
constructed to correct the alignment error between two matched scans.
A local minimum escape mechanism was incorporated in the process to
further resolve the local minimum issue.
A real-time, line-based map-building and localization process was
constructed by combining the ICP algorithm with the line feature-based
transformation correction mechanism and the local minimum escape
mechanism.

83
IV. IMPROVED MAP-BUILDING AND LOCALIZATION
ALGORITHMS FOR HIVE ENVIRONMENT
A. SEPARATION OF MAP-BUILDING AND LOCALIZATION PROCESSES
1. Motivation
In the previous chapter, a real-time, line-based map-building and localization
algorithm was constructed by combining the ICP algorithm with the line feature-based
transformation correction mechanism and the local minimum escape mechanism. This
algorithm is suitable for the use of simultaneous localization and map-building (SLAM).
However, there are some particular cases, such as the huge immersive virtual
environment (HIVE), in which the environment is merely a rectangular-shaped space
with its longest side shorter than the maximum effective range of the ranging
measurement system. Under this circumstance, the process for building the map is no
longer required all the time as long as the map being built is roughly complete. In other
words, map-building and localization do not necessarily need to be implemented
simultaneously. The original process can be divided into two separated ones. The map-
building process is implemented beforehand to build a map of the environment, while the
localization process that determines the whereabouts of the ranging measurement system
within this map becomes the main focus after the map-building process is completed.
Furthermore, the estimation error for the original process using the presented
algorithm may still be accumulated over time despite the fact that it has been reduced, as
discussed in the previous chapter. This issue is expected to be resolved by using the
separated processes since the estimation error will not be further accumulated after the
map-building process is completed. The estimation error for the subsequent localization
process can thus be bound within a certain range, because the process becomes
restrictedly the scan-matching process between every newly acquired scan and the fixed
map, and the error of every scan-matching process is independent and is not cumulative.
The value of this bound error will correlate closely with the overall error accumulated
during the map-building process. The localization process is expected to offer high
accuracy when a well-built map is used.

84
2. Environment Requirements
To apply the concept of the two separated processes, it is necessary to ensure that
the map can be built accurately, so that the subsequent localization process can be
implemented properly. This is accomplished by following the two requirements when
adopting the operating environment.
The environment needs to meet the third assumption discussed in Section I
of Chapter III for the original ranging measurement system-based map-
building and localization process to properly operate.
The environment needs to be a convex polygonal shape. This is required
for the ranging measurement system to detect most of the boundaries
directly without obstruction at any position within the environment. A
simpler environment such as a general rectangular-shaped indoor space is
recommended for obtaining an accurate result.
B. MAP-BUILDING PROCESS
The separated map-building process is intended to build the map of the operating
environment for later use in localization. It only needs to be completed once for the same
environment. The algorithm used for this process is the same as the original line-based
map-building and localization process presented in the previous chapter with some
modifications made. Three major modifications are summarized as follows.
An offline process approach is adopted instead of a real-time approach.
This is intended to speed up the scanning rate, since the process does not
spend time completing scan matching and merging during the period in
which the scans are taken. Given a higher scanning rate, the
transformation between every two consecutive scans is thus smaller, and a
better scan-matching result may be produced. This concept is similar to
the first assumption discussed in Section I of Chapter III. However, the
scanning rate is adjusted to be as low as 2 Hz in this chapter to reduce the
number of scans that need to be processed. The first stage of this map-
building process is to take scans that cover most boundaries of the
environment. At this stage, it is necessary to move the ranging
measurement system around to ensure complete scanning coverage but
also to keep the trip short to avoid unnecessarily accumulating the
estimation error. A small circle around the environment is suggested. The
second stage is to process the scans and to build the map off line by using
the same algorithm as that used in the original line-based map-building
and localization process.
The merging mechanism between two matched scans used in this
separated process keeps more information than the one used in the original

85
algorithm. The original merging mechanism discards a larger portion of
map information in exchange for a higher efficiency. However, building a
more detailed map is the main focus of this separated process, and the
efficiency for merging the scans is no longer an issue since this process is
implemented off line. An additional correspondence search between the
old and new scans is conducted to determine whether the information in
the old scan needs to be discarded. Only the line segments of the old map
with their correspondence found within a given range are regarded as the
duplicate information and are discarded.
The merging mechanism is not implemented every process cycle.
Following the previous modification, the amount of information in the
map may become massive as the number of scans being merged grows.
This may affect the efficiency of the later uses of the localization process.
To reduce the amount of information but still keep necessary details in the
final map, only a given number of scans are merged.
An example of the separated map-building process is shown in Figure 49. The
line set in different colors represents the final map of the environment, while the point set
in red shows the trajectory of the ranging measurement system as the scans were taken.
The trajectory for this process is arbitrary as long as the scans contain most boundaries of
the environment. In this particular example, the ranging measurement system was moved
around roughly in a small circle to ensure that sufficient information of this environment
was gathered. Figure 50 shows the magnified plot of the trajectory of the ranging
measurement system.

86
Figure 49. An example of the separated map-building process. The line set in
different colors represents the resulting map of the environment, while the
point set in red shows the trajectory of the ranging measurement system.
The map consisting of 713 line segments was built by matching 119
individual scans but merging only 10 of them. The 10 merged scans were
chosen evenly throughout all of the scans. The test was implemented in an
indoor basketball court of Miami University in Oxford, Ohio.

87
Figure 50. Trajectory of the ranging measurement system when building the map as
shown in Figure 49. The start and end positions are (0.0, 0.0) and
(0.199130768983, -0.000033682402), respectively.
As discussed in the previous chapter (Section I), a space that is narrow and long,
such as a corridor, is not suitable for the original map-building and localization process. It
may not be suitable for the separated map-building process either. However, it is worth
indicating the improvement obtained by using the separated map-building process in
comparison with the original map-building and localization process in coping with such
an environment. The scan-matching error can be reduced to a certain degree. The results
for the same range data processed by the two processes are shown in Figure 51. The
scans were taken from one end of a corridor to the other. The map built by using the
separated map-building process better represents the shape of the actual corridor
environment, while the one obtained using the original map-building and localization
process appears shorter and more crooked.

88
Figure 51. The comparison between the results of using the separated map-building
process (left) and the original map-building and localization process (right)
in a corridor environment. The final map on the left consisting of 5033
line segments was obtained by matching 862 scans but merging only 29 of
them. The final map on the right consisting of 6295 line segments was
obtained by matching and merging 862 scans. The point sets in red
represent the estimated trajectories when collecting the range data. The
map on the left better represents the shape of the actual environment,
while the one on the right appears shorter and more crooked. The scans
were taken in Spanagel Hall (5th floor corridor from one end to the other)
of the Naval Postgraduate School.

89
C. LOCALIZATION PROCESS
The separated localization process is intended to determine the orientation and
position of the ranging measurement system by matching the map with every newly
acquired scan. The only difference of this separated process from the original real-time,
line-based map-building and localization process is that the map is no longer being
updated. In other words, the map is matched but not merged with every newly acquired
scan. The map is the one built beforehand using the separated map-building process
presented in the previous section.
Figure 52 shows an example of the separated real-time localization process using
the map built in the example shown in Figure 49. The ranging measurement system was
moved roughly in a rectangular loop (i.e., moved alternately between moving forward
and turning right until back to the start position). For the example shown in Figure 52, a
comparison of the trajectories of the ranging measurement system obtained by using both
the separated real-time localization process and the precision position tracker (PPT)
system is shown in Figure 53. It is noted that the trajectory obtained by the separated
localization process closely matches the one obtained by the PPT system. (In this
example, the RMS error of the trajectory determined by the separated real-time
localization process relative to the one determined by the PPT system is approximately
0.02 meters.) The proposed process is able to offer high localization accuracy.
Another example of the separated real-time localization process is shown in
Figure 54. The ranging measurement system was moved randomly from and back to the
origin within the map.

90
Figure 52. An example of the separated real-time localization process using the map
built in the example as shown in Figure 49. The point set in red shows the
trajectory of the ranging measurement system within the map. The map
was matched against 138 new scans for estimating 138 data points within
the trajectory. The test was implemented in an indoor basketball court of
Miami University in Oxford, Ohio.

91
Figure 53. A comparison of the trajectories of ranging measurement system obtained
by using both the real-time localization process and the PPT system. The
trajectory in red is estimated by implementing the separated real-time
localization process, while the trajectory in blue is estimated by using the
PPT of the HIVE. The HIVE is located in an indoor basketball court of
Miami University in Oxford, Ohio. The RMS error of the trajectory
determined by the separated real-time localization process relative to the
one determined by the PPT system is approximately 0.02 meters.

92
Figure 54. An example of the separated real-time localization process using the map
built in the example shown in Figure 49. The point set in red shows the
trajectory of the ranging measurement system within the map. The map
was matched against 183 new scans for estimating 183 data points within
the trajectory. The test was implemented in an indoor basketball court of
Miami University in Oxford, Ohio.

93
For the example shown in Figure 54, a comparison of the trajectories of the
ranging measurement system obtained using both the separated real-time localization
process and the PPT system is shown in Figure 55.
Figure 55. A comparison of the trajectories of ranging measurement system obtained
by using both the real-time localization process and the PPT system. The
trajectory in red is estimated by implementing the separated real-time
localization process, while the trajectory in blue is estimated by using the
PPT of the HIVE. The HIVE is located in an indoor basketball court of
Miami University in Oxford, Ohio. The RMS error of the trajectory
determined by the separated real-time localization process relative to the
one determined by the PPT system is approximately 0.13 meters.

94
The two previous examples were both compared with the measurements obtained
by the PPT system, whose results are regarded as the ground truth because of its accuracy.
According to the comparison shown in Figure 55, there are occasionally large errors
between the trajectories determined by using the separated real-time localization process
and the PPT system. These errors are mainly due to mismatching between the map and
the newly acquired scans. It is also noted that these errors do not have a marked impact
on the accuracy of subsequent estimates, because each process cycle that conducts scan
matching is independent from the other process cycles. While scan matching
implemented during the separated real-time localization process is successful, there is no
marked error when compared with the measurement of the PPT system. On the other
hand, when there is mismatching between the map and the newly acquired scan, the error
becomes marked and is approximately under 0.75 meters for this particular example. (In
this example, the RMS error of the trajectory determined by the separated real-time
localization process relative to the one determined by the PPT system is approximately
0.13 meters.)
Unlike the original line-based map-building and localization process, the error
produced during a certain cycle of the separated localization process is regarded as a
special case for that specific process cycle and is not cumulative.
D. SUMMARY
This chapter presented the improved map-building and localization algorithms
obtained by dividing the original algorithm into the uses of two separate processes, the
map-building and the localization, for particular types of operating environments. The
objectives were to improve the quality of the map being built and to resolve the issue of
the accumulated estimation error existing in the original algorithm presented in the
previous chapter. Several experiments were conducted to verify the uses of the two
separated processes.
The two main contributions of this chapter are summarized as follows.
A separated map-building process that adopts an offline process approach
was constructed to build a map of the operating environment. The map
built by using this separated process is more accurate and contains more

95
details relative to the one built by the original, real-time, line-based map-
building and localization process.
A separated real-time localization process was constructed to estimate the
orientation and position of the ranging measurement system by matching
the map built beforehand with every newly acquired scan. This separated
process is able to resolve the issue of accumulated estimation error that
exists in the original, real-time, line-based map-building and localization
process. The error produced during a particular cycle of this separated
process does not affect the accuracy of subsequent cycles and is not
cumulative.

96
THIS PAGE INTENTIONALLY LEFT BLANK

97
V. INERTIAL/MAGNETIC SENSOR-BASED LOCOMOTION
INTERFACE FOR VIRTUAL ENVIRONMENT SYSTEMS
A. BACKGROUND AND MOTIVATION
A locomotion interface for the virtual environment systems relates the motions
made by the user in the real physical environment to the motions in the virtual
environment.
The simplest types of locomotion interfaces are the computer mice and keyboards
that usually come along with the purchase of computers without the need for support
from other peripheral products. When navigating through the virtual environment in first-
person3 types of video games [64], the mouse movements can be related to the changes of
the virtual head (or body) orientation, while the key presses can be related to the virtual
body movements towards certain directions. A disadvantage of these types of locomotion
interfaces is that there is little or no similarity between the real motions and the virtual
motions of the users. The users need to practice before getting good control over them.
Joysticks provide users with better control over the motions in the virtual
environment. However, they fail to provide a good sense of presence unless the users are
driving a virtual vehicle. For the simulated walking motions through the virtual
environment, there is still little similarity between the control over the joysticks and over
the virtual walking motions.
The locomotion interface of the well-known video game console, Wii [65],
released by Nintendo Co, Ltd. provides users with relatively better sense of presence. By
utilizing the built-in accelerometers in the Wii remote, it allows users to control the
motions of their player characters with their own physical arm gestures.
Another well-known motion sensing device, Kinect for Xbox 360 and Windows
PCs [66], [67] released by Microsoft Corporation, provides even better sense of presence.
The device utilizes an RGB camera and a depth sensor to provide 3D body motion
capture and facial recognition. Different from the Wii, the Kinect has no remote
3 In video games, first-person refers to a graphical perspective rendered from the player character's point of
view [64].

98
(controller) for the users to hold. The users are able to control the motions of their player
characters solely with their own physical body gestures.
One of the disadvantages of the Wii and Kinect-like devices is that the real
physical spaces of the users are limited to certain tracking areas of such devices. This
may greatly compromise the user’s sense of presence. For example, when navigating
through the virtual environment by walking, the users can only walk in place to prevent
themselves from walking outside of the tracking area, and walking-in-place is still
different from natural walking motions.
Some CAVE-like virtual environment infrastructures share the same limit as the
Wii or Kinect-like devices. Therefore, in order to allow users to walk naturally through a
large-scale virtual environment without significantly changing their actual physical
locations, some treadmill designs were proposed for the construction of locomotion
interfaces.
One example of the one-dimensional (1D) treadmill designs is the Sarcos
Treadport [9], [10], [68] that comprises a large tilting treadmill with an active mechanical
tether as shown in Figure 56. The mechanical tether measures the user’s physical position
and orientation and controls the treadmill speed and the user’s location in the virtual
environment. Because this type of treadmill works only in one direction, an artificial
means is needed for controlling the user’s turning motions.
Figure 56. The Sarcos Treadport comprising a large tilting treadmill with an active
mechanical tether (from [9]).

99
The more sophisticated designs that enable users to walk physically in different
directions are the 2D treadmill designs. One such design is the Torus Treadmill [11], [12]
as shown in Figure 57. The surface of the Torus Treadmill is a combination of 12
treadmills connected side by side. These 12 treadmills can also be driven in a
perpendicular direction. Thus, an infinite surface can be generated by moving these
treadmill surfaces in both forward-backward and rightward-leftward directions that
cancel out the user’s movement. While navigating through the virtual environment by
walking, the user’s real physical location will roughly remain the same at the center of
the treadmill surface.
Figure 57. The Torus Treadmill consisting of 12 treadmills connected side-by-side
(from [11]).
Another similar design that allows the user to move physically in different
directions is the Omni-Directional Treadmill (ODT) [13] shown in Figure 58. It was built
for the U.S. Army’s Dismounted Infantry Training Program. A study that compared the
ODT with a walking-in-place device called LocoX can be found in [69].

100
Figure 58. A soldier walks on the Omni-Directional Treadmill (from [13]).
Walking is perhaps the most fundamental example for the user to interact with a
virtual environment [70]. The treadmill designs are able to overcome the space limit and
to provide the users with a better sense of presence by allowing the users to walk
naturally when navigating through the virtual environments. However, locomotion
interfaces utilizing the treadmill designs rely heavily on the pre-installed infrastructure in
some facilities. The developed virtual environment systems are not portable and not
easily accessible to the public.
Motivated by resolving the portability issue, an inertial/magnetic sensor-based
locomotion interface will be developed for the construction of the self-contained, portable,
and immersive virtual environment systems. Such a locomotion interface will allow the
user to navigate through the virtual environments by using natural walking motions.
Furthermore, while walking towards a certain direction in the virtual environment, the
user will be able to turn his/her head to look around the environment without affecting
his/her walking motions.
The proposed locomotion interface consists of two components, the mechanisms
for relating the foot (walking) motions and the head motions. The inertial/magnetic

101
measurement units (IMMUs) are attached to the user’s foot and head to measure their
motions.
B. MECHANISMS FOR RELATING WALKING MOTIONS
1. Preprocessing of the Sensor Data
The data acquired for the walking motions is from the IMMU attached to the foot.
The top view of a notional representation of the IMMU and the foot is shown in Figure
59. In this example, the coordinates of the IMMU follow its own moving body’s forward-
right-down (FRD) (x-y-z) coordinate system. The subsequent research adopts the same
coordinate system for such an IMMU.
Figure 59. Top view of a notional representation of the IMMU attached to the foot.
The IMMU provides the raw data from its built-in accelerometers, angular rate
sensors, and magnetometers along with the orientation represented by the Euler angles
(the roll, pitch, and yaw angles) computed by the manufacturer’s proprietary algorithm.
Note that it is useful to represent the orientation in the form of a quaternion. The use of
quaternions enhances the overall efficiency since it avoids the computationally-expensive
trigonometric operations performed when the rotation matrices are used instead.

102
The acceleration measurements are represented in the IMMU’s body coordinate
system (also called the moving body frame). These measurements need to be transformed
and represented in the global (north-east-down) coordinate system (also called the
navigation frame) to be used effectively. The orientation represents the attitude of the
moving body frame relative to the navigation frame. It serves as the transformation
operator between the two coordinate frames.
The orientation (represented by a quaternion) used to transform the IMMU’s
acceleration measurements is determined using the adaptive gain quaternion-based
complementary filter developed in [29], [30]. The orientation obtained by this means is
more accurate than the one provided by the IMMU.
The acceleration in the navigation frame is determined by transforming the
acceleration in the moving body frame with the quaternion . This is accomplished by
implementing the quaternion multiplication. Because the component of gravity is
contained in the acceleration, its effect needs to be removed after the transformation.
, (5.1)
where
,
,
,
, and .
The 3D vector is represented as a pure quaternion with the scalar portion equal to zero
during the quaternion multiplication. The result of such a multiplication is also a pure
quaternion (i.e., a 3D vector).
As a means of manipulating the 3D object in the virtual environment, the Euler
angles (the roll, pitch, and yaw angles) representing the orientation of the object are
widely used in most of the 3D graphics application programming interfaces (APIs).
Therefore, the quaternion determined using the adaptive gain quaternion-based
complementary filter needs to be converted into the Euler angles. The conversion
between the two representations is efficient and straightforward.

103
2. Gait-Phase Detection
A gait cycle consists of a stance phase and a swing phase. The stance phase of
either foot represents the period that this foot is in contact with the ground, while the
swing phase represents the period otherwise. A gait phase detection mechanism [28]‒[30]
is able to distinguish between the stance phase and the swing phase in the gait cycle by
comparing the angular velocity of the foot with a specified threshold (1.0 radian/second
for the use of this dissertation).
, (5.2)
where the term is the angular velocity of the foot with respect to the moving body
frame. The term is the magnitude of the foot’s angular velocity. The angular
velocities and
are the weights about the x and y axes of the moving body frame.
The weight about the z axis is not considered when determining the gait phase. If the
magnitude of the foot’s angular velocity is greater than the threshold, the foot motion is
regarded during the swing phase; otherwise, it is during the stance phase.
The locomotion interface for the walking motions is therefore divided into two
portions in accordance with the two separate gait phases. When navigating through the
virtual environment, the direction that the user’s body is facing is controlled during the
stance phase, while the horizontal movement of the user is controlled during the swing
phase.
3. Mechanism for Stance Phase
As mentioned earlier, the direction that the user’s body is facing in the virtual
environment is determined during the stance phase of foot motions. The yaw angle from
the orientation data of the foot is used to calculate the virtual body’s facing direction.
This is based on the fact that the facing direction change of the body about the vertical
axis (z axis) is positively correlated with the yaw angle change of the foot while walking.

104
The orientation data are gathered and processed once while composing each
frame4 of the virtual environment. The virtual body’s facing direction for the current
frame is equal to its facing direction - during the previous frame plus the difference
between the current and previous estimates of the foot’s yaw angles.
- , (5.3)
- , (5.4)
where the terms and - represent the yaw angles of the foot determined during the
current and previous frames. The subscripts and - represent the values determined
during the current and previous frames, respectively. Note that the yaw angle of the
(physical) foot is relative to the north, while the facing direction of the (virtual) body is
relative to its initial direction.
To provide a more consistent scene rotation without sudden jump between two
consecutive frames, a threshold is needed to limit the value of yaw angle difference .
The threshold is set in the form of the angular rate. An angular rate of 600 degrees/second
is adopted in this dissertation. That is, if the yaw angle difference is greater than
degrees or less than - degrees, it is clamped to degrees or
- degrees, respectively. The term represents the time difference between the
current and previous frames. This may reduce the chance of occurrence of motion
sickness to the user.
It is noted that the virtual body’s facing direction will not necessarily be equal to
the yaw angle of the foot because a relative approach is adopted. This is desired in this
research. Such an approach uses the real foot’s yaw angle difference to determined how
much the virtual body has turned. It will allow further manipulation of the virtual body’s
facing direction when conducting the obstacle avoidance task, which is investigated later
in the next chapter. The human perception will not be able to precisely distinguish the
difference between the amounts by which the physical body and the virtual body turned.
4 The term frame mentioned here has a different meanings from the one used to represent the coordinate
system, such as the navigation frame. It represents one of a series of consecutive images rendered by the graphics pipeline.

105
On the other hand, an absolute approach is to directly set the virtual body’s facing
direction equal to the real foot’s yaw angle. If this approach is used instead, the virtual
body’s facing direction cannot be further manipulated.
4. Mechanism for Swing Phase
The horizontal movement of the user in the virtual environment is controlled
during the swing phase of the foot motions. This is addressed by calculating the
horizontal translation of the user during the composition of current frame relative to the
user’s location and orientation in the previous frame. The transformed IMMU
acceleration estimate is used for the calculation.
Before the acceleration estimate is utilized to determine the translation, a
further transformation needs to be conducted. The estimate follows the north-east-
down coordinate system, while the translation is relative to the user’s current orientation
and follows the user’s forward-right-down coordinate system. A rotation (about the z axis
of the north-east-down coordinate system) by the foot’s yaw angle in the negative
direction is needed to represent the acceleration in the same coordinate system as the
translation. This assumes that the facing direction of the user’s physical body coincides
with his/her foot’s forward direction (x axis).
The transformation operator in terms of a quaternion - can be represented as
the following:
-
. (5.5)
The acceleration represented in the user’s forward-right-down coordinate
system can be obtained by transforming the acceleration in the north-east-down
coordinate system with the quaternion - .
- - , (5.6)
where

106
-
, and
.
The horizontal velocities
and
along the x and y axes of the user’s
forward-right-down coordinate system during the current frame can be calculated as
follows:
-
-
, (5.7)
-
-
, (5.8)
where the subscripts and - represent the values determined during the current and
previous frames, respectively. The term represents the time difference between the
current and previous frames.
The horizontal translations
and
along the x and y axes of the user’s
forward-right-down coordinate system during the current frame can also be calculated as
follows:
, (5.9)
. (5.10)
Due to the effect caused by the drift error in the IMMU’s acceleration estimates,
the resulting translations calculated using the presented method may oscillate back and
forth even if the real movement is towards the same direction. For example, one step
forward will always generate positive values for the translation
during the swing
phase by principle. Despite this, negative values may occasionally be produced in
practice. Under such a circumstance, the negative values need to be eliminated to provide
the user a more consistent sense of movement in the virtual environment. On the other
hand, the positive values need to be removed when taking one step back. Therefore, there
is a need to determine the desired signs of translations
and
(i.e., moving either
forward or backward, and either right or left) at the beginning of each swing phase.

107
The approach used in this dissertation determines the direction of the user’s
movement by checking the signs of the angular velocities and
about the x and y
axes of the IMMU’s moving body coordinate system at the beginning of each swing
phase. For each step forward, a negative value of is expected. A notional
representation of the beginning of swing phase is shown in Figure 60. On the other hand,
a positive value of means that the user is taking a step backward. A similar approach
is used to determine the direction (either towards the right or the left) of the side steps.
For example, a positive value of means that the user is taking a side step to the right.
Note that a normal step of the walking motions usually consists of the composition of two
types of movements (forward-backward and right-left movements) along the x and y axes
of the user’s forward-right-down coordinate system.
Figure 60. A notional representation of the beginning of swing phase during which a
person takes a step forward with the foot mounted with the IMMU. In this
example, a negative value is expected for the angular velocity about the y
axis of the IMMU’s moving body coordinate system.

108
5. Mechanisms for Walking Motions
The mechanisms for relating the foot (walking) motions during the composition
of each frame can be summarized by the flowchart as shown in Figure 61.
Figure 61. Flowchart of the mechanisms for relating the foot (walking) motions
during the composition of each frame.
C. MECHANISMS FOR RELATING THE COMBINATION OF HEAD AND
WALKING MOTIONS
The head motions can be incorporated into the mechanisms for relating the
walking motions discussed in the previous section. This provides users with a more
realistic sense of walking that replicates the real-life walking motions.
Besides the foot motions, the real-life walking motions usually include the head
motions that have the following two characteristics:

109
The head is able to turn freely (within a certain range not exceeding the
limit of human bodies) to look into a different direction other than the
body’s facing direction and the walking direction.
Although the head’s facing direction and the body’s facing direction will
not necessarily interfere with each other, the sense of difference between
the two directions can be well-perceived by humans. Therefore, the head
motions and body motions are not completely independent of each other.
The head motions to be determined are the head’s orientation in terms of the Euler
angles (the roll, pitch, and yaw angles). The estimates for these angles can be obtained
from the IMMU attached to the head-mounted display. The top view of a notional
representation of the IMMU attached to the head-mounted display is shown in Figure 62.
In this example, the coordinates of the IMMU follow its own moving body’s forward-
right-down (x-y-z) coordinate system.
Figure 62. Top view of a notional representation of the IMMU attached to the head-
mounted display.
As discussed in the previous section, the orientation for the IMMU attached to the
foot is calculated using the adaptive gain quaternion-based complementary filter
developed in [29], [30]. This is intended to determine the orientation that is accurate
enough to be further used to transform the acceleration estimates. However, for the use of
solely determining the head orientation in this section, the orientation (following the

110
north-east-down coordinate system) provided by the IMMU attached to the head can be
directly adopted. For relating the true head motions to the virtual head motions, the
orientation accuracy is not crucial as long as the sense provided for the user is realistic.
The virtual head’s roll angle for each frame is determined by directly adopting the
IMMU’s roll angle estimate without further processing. This portion of the head motions
is relatively less active in comparison with the changes in the head’s yaw and pitch
angles.
For determining the virtual head’s pitch angle, the direct use of IMMU’s pitch
angle estimate was originally investigated. However, the virtual environments often
oscillated up and down severely due to the walking motions. This would cause great
discomfort to the users. To reduce the magnitude of oscillations, a relative approach is
used and a threshold value is utilized to limit the virtual head’s pitch angle difference
between two consecutive frames.
The virtual head’s pitch angle for the current frame is equal to the angle
during the previous frame plus the difference between the current and previous
estimates of the real head’s pitch angles.
- , (5.11)
- . (5.12)
where the terms and represent the real head’s pitch angles determined during the
current and previous frames. The subscripts and - represent the values determined
during the current and previous frames, respectively.
The threshold is set in the form of an angular rate. In this dissertation, an angular
rate of 120 degrees/second is adopted. That is, if the pitch angle difference is greater
than degrees or less than - degrees, it is clamped to
degrees or - degrees, respectively. The term represents the time difference
between the current and previous frames.
It is noted that the virtual head’s pitch angle will deviate from the real one by
using such an approach. One method to resolve this issue is to make an adjustment per

111
frame to reduce the discrepancy between two angles. An angular rate of 5 degrees/second
is adopted to align the virtual head’s pitch angle with the real one gradually.
The relative approach is also used to determine the virtual head’s yaw angle. The
difference between the current and previous estimates of the real head’s yaw
angles is obtained as the following:
- . (5.13)
Again, in order to provide a more consistent scene rotation without sudden jumps
between two consecutive frames, a threshold is needed to limit the value of yaw angle
difference . The threshold is set in the form of an angular rate, which is 600
degrees/second in this dissertation. That is, if the yaw angle difference is
greater than degrees or less than - degrees, it is clamped to
degrees or - degrees, respectively.
Assuming that the virtual body’s facing directions are the same during the current
and previous frames, the virtual head’s yaw angle for the current frame will be equal
to the angle - during the previous frame plus the real head’s yaw angle difference
. However, the virtual head’s yaw angle is always represented relative to the
virtual body’s facing direction. While the difference of the virtual body’s facing direction
is not necessarily zero, the real head’s yaw angle difference is
related to the combination of the virtual body’s facing direction difference
and the virtual head’s yaw angle difference relative to the virtual body’s facing direction
.
. (5.14)
The virtual head’s yaw angle (relative to the virtual body’s facing direction) for the
current frame can be determined as the following:
- , (5.15)
where
.

112
Based on the experimental investigation, both the virtual body’s facing direction
and the virtual head’s yaw angle are determined using the relative approach, which makes
the angles easy to manipulate. The true head motions and body (walking) motions can be
related to the motions in the virtual environments in a relatively independent manner.
However, as mentioned earlier, the head motions and body motions should not be
completely independent. The sense of the virtual head’s yaw angle relative to the body
needs to be consistent with the real one. Otherwise, some awkward situations may occur.
For example, moving forward physically may result in moving backward virtually.
Therefore, a mechanism is needed to correct the discrepancy between the real and virtual
yaw angles of the head relative to the body.
The correction to such a discrepancy can be conducted during the stance phase of
the foot motions. Assuming that the real foot’s yaw angle also represents the real body’s
yaw angle, the real head’s yaw angle relative to the body is
obtained by calculating the difference between the yaw angle from the
IMMU on the head-mounted display and the yaw angle from the one on the
foot.
, (5.16)
where the real body’s yaw angle is equal to the real foot’s yaw angle
.
The virtual head’s yaw angle relative to the body for the previous frame is - .
The difference between the real and virtual heads’ yaw angles relative to
their bodies can be obtained as the following.
- . (5.17)
As discussed in the previous section, the virtual body’s facing direction for the current
frame is equal to its facing direction - during the previous frame plus the
difference between the current and previous estimates of the foot’s yaw angles.
- , (5.18)

113
- . (5.19)
To correct the discrepancy, the modification is applied to adjust the virtual body’s facing
direction eventually. For this end, the equation (5.18) needs to be modified as the
following:
- . (5.20)
By incorporating the mechanism that corrects the discrepancy between the real
and virtual yaw angles of the head relative to the body, the real head and body (walking)
motions can be replicated for navigating through the virtual environments. The
mechanisms for relating the combination of head and foot (walking) motions during the
composition of each frame can be summarized by the flowchart shown in Figure 63.
Figure 63. Flowchart of the mechanisms for relating the combination of head and
foot (walking) motions during the composition of each frame.

114
D. SUMMARY
This chapter presented the development of a locomotion interface that relates
physical walking motions to virtual walking motions for navigating through virtual
environments, disregarding the obstacle avoidance issue in physical environments. The
virtual walking motions from the first-person perspective consist of two major sets of
motions, the foot (body) motions and the head motions. In correspondence with such
motions, the inertial/magnetic measurement units (IMMUs) were attached to both the
user’s real foot and head for collecting the raw sensing data regarding their motions.
Separate mechanisms were constructed for relating such sensing data to the virtual body
and head motions. Through the interactions established between the separate mechanisms
of the body and head motions, the natural walking motions were able to be replicated in
virtual environments.
The main contribution of this chapter is providing an approach to developing an
inertial/magnetic sensor-based locomotion interface that allows the user to use natural
walking motions to navigate through virtual environments. The locomotion interface
developed contributes to the construction of self-contained, portable, and immersive
virtual environment systems. The method used to address the obstacle avoidance issue in
a physical environment with a limited size is discussed in the next chapter.

115
VI. INERTIAL/MAGNETIC SENSOR-BASED LOCOMOTION
INTERFACE INCORPORATED WITH A RANGING
MEASUREMENT SYSTEM
A. BACKGROUND AND MOTIVATION
In the previous chapter, an inertial/magnetic sensor-based locomotion interface
for virtual environment systems was developed. Such a locomotion interface allows the
user to walk naturally to navigate through virtual environments. It is noted that the
obstacle avoidance problem in physical environments has not yet been considered during
the interface development. This may not be an issue when operating in a physical
environment with dimensions larger than the dimensions of the virtual environment.
However, one of the key purposes of utilizing virtual environments is often to overcome
the limitation in the dimensions of physical environments. It is necessary to always
consider the virtual environments larger than the physical space available when
developing the locomotion interface. A mechanism for the user to avoid obstacles in the
physical environment therefore needs to be incorporated into the mechanisms of the
locomotion interface.
Obstacles in this dissertation are referred to as static (or moving) objects that may
block the user’s course of walking motions. Common examples may include the
boundaries (walls) and the furniture (tables or chairs) in the physical environment.
As briefly discussed in Chapter II (Section D), redirected walking [42]‒[44] may
be adapted to avoid obstacles. It was designed to rotate the entire virtual environment
around the user’s viewpoint imperceptibly to steer the user’s walking direction away
from obstacles. The injected rotation rate can be made to be proportional to the
magnitude of user’s virtual linear and angular velocities, which can be determined by
utilizing the inertial/magnetic sensor-based system (locomotion interface) developed in
the previous chapter. For example, a higher rotation rate can be injected when the
magnitude of the linear or angular velocity is higher.
The original redirected-walking mechanism [42]‒[44] was created under the
assumption that the user’s physical environment is known and fixed. For example, a

116
CAVE-like environment or a space equipped with a pre-installed optical sensor-based
measurement system was utilized to contain the user in some kind of tracking area. The
physical position and orientation of the user in such a tracking area can be obtained
relatively directly for conducting obstacle avoidance. However, for the system
configuration of the locomotion interface aiming at portability in this study, the operating
physical environment is an arbitrary open space rather than a fixed tracking area with the
pre-installed infrastructure. In order to utilize the concept of redirected walking for
obstacle avoidance, one of the key tasks of the locomotion interface is to collect and
process the information regarding the physical environment surrounding the user. Since a
ranging measurement system has been proven feasible for collecting such information, as
discussed in Chapters III and IV, it can be incorporated as a substitute for the various
infrastructures that offer a complete knowledge of the physical environment for
conducting redirected walking.
There are two different approaches to solving the obstacle avoidance problem, the
absolute approach and the relative approach. The absolute approach requires a complete
knowledge of the user’s physical environment (such as the whereabouts of obstacles) and
the user’s position and orientation in this environment. On the other hand, the relative
approach only requires the user’s local information directly measured by the ranging
measurement system, such as the distances and directions of obstacles relative to the user.
The original redirected-walking mechanism falls into the category of the absolute
approach.
Motivated to resolve the obstacle avoidance issue, in this chapter an improved
redirected-walking mechanism is developed to utilize the environment information
collected by a ranging measurement system to operate in accordance with the
mechanisms of the inertial/magnetic sensor-based locomotion interface proposed in the
previous chapter. Offering better processing efficiency for real-time implementation, the
mechanism will be based on the relative approach, which utilizes only the local
information from one single scan of the ranging measurement system at the current
moment.

117
B. REDIRECTED WALKING FOR OBSTACLE AVOIDANCE
1. Original Redirected-Walking Mechanism
The redirected-walking mechanism is a technique that injects an angular velocity
into virtual environments to steer the user’s walking direction gradually towards a desired
target location in the physical environment. The desired result of the original redirected-
walking mechanism can be described by Figure 64. Assuming that the user initially faces
the wall in the physical environment, as the user walks closer and closer to the wall, the
virtual trajectory may eventually go through the wall, while the real trajectory will be
gradually steered away from the wall and towards a specified target location.
Figure 64. Desired result of the original redirected-walking mechanism. As the user
walks closer and closer to the wall in the physical environment, the virtual
trajectory may eventually go through the wall, while the real trajectory
will be gradually steered away from the wall and towards a specified
target location. It is noted that the virtual and real trajectories initially
overlapped with each other.
According to [42] and [44], the original redirected-walking mechanism uses the
magnitude of user’s linear and angular velocities as input parameters to determine the
candidates of rotation rates to be injected to the rotation of virtual environment. A small
baseline rotation rate is injected even when the user is standing still. The maximum of the

118
three candidates of rotation rates is chosen and scaled by a direction coefficient, which is
determined by computing the sine of the angle between the user’s current heading and the
target location in the real physical environment. The scaled value is then compared with a
certain threshold value that is the angular velocity which seemed imperceptible to the
user. If it does not exceed the threshold, it is used as the angular velocity to be injected
into the rotation of the virtual environment. Otherwise, it is clamped to the threshold
value. The block diagram for such a mechanism is shown in Figure 65.
Figure 65. Block diagram of the original redirected-walking mechanism (adapted and
revised from [42] and [44]).
One of the issues with this mechanism is that when the user is heading directly
away from the target location (often the center of real physical environment), the system
does not steer him/her back toward it. The reason is that the angle between the user’s
heading and the target location is now 180 degrees, which causes the direction coefficient
equal to zero. Therefore, an approach introduced in [44] is to pre-allocate multiple target
locations. When the user is heading directly away from one target location, the system
will automatically select another that is more convenient for conducting the redirected-
walking mechanism.
However, specifying a single or multiple fixed target locations is not always
optimal for conducting redirected walking. A better concept is to continuously steer the
user towards a direction that offers more vacant space instead of some particular
locations to better utilize the space available and to reduce the unnecessary rotation rate

119
being injected. Before discussing the realization of such a concept, the form of the
environment information being collected and provided by the ranging measurement
system is briefly reiterated.
2. Information Provided by the Ranging Measurement System
The data collected by the ranging measurement system typically consist of an
array of range measurements. Since the direction of each measurement can be determined
based on the configuration of sensor units, these measurements can be represented as a
set of vectors relative to the center of the ranging measurement system in the two-
dimensional or three-dimensional coordinate system (either in the polar or Cartesian
form).
As shown in Figure 66, each range measurement can be represented as a vector
with the length and the bearing in the two-dimensional polar form. The vector can
also be represented in the two-dimensional Cartesian form.
. (6.1)
Figure 66. Notional representation of the range measurement as a vector with the
length and the bearing .

120
3. Dynamically-Updated Target Direction Substituted for Particular
Predefined Locations in the Redirected-Walking Mechanism
The intended use of the redirected-walking mechanism is to steer the user away
from obstacles (such as walls) in the physical environment. The original redirected-
walking mechanism specifies a target location (usually the center of the tracking area) or
a set of target locations by turns. Ideally, the user will be redirected to walk towards such
a location eventually.
However, specifying a single or multiple fixed target locations is not always
optimal for conducting redirected walking as discussed earlier. A better approach is to
continuously steer the user towards a direction that offers more vacant space instead of
some particular locations. Such a dynamically-updated target direction can be determined
by constructing the potential field [71] of the measurement vectors provided by the
ranging measurement system.
For example, a notional representation of eight range measurements at a given
moment is illustrated as shown in Figure 67. The terms R1 through R8 represent the
distances between the ranging measurement system (carried by the user) and the
obstacles. Note that the number of range measurements will be based on the
configuration of the ranging measurement system. The use of eight measurements in this
example is only intended for illustrating the concept.
The repulsive potential field of such range measurements can be illustrated as
shown in Figure 68. It consists of all the repulsive forces represented by the reciprocals of
the range measurements. The combined force of the potential field is shown in Figure 69.
The direction of the combined force can be utilized as the target direction in the
redirected-walking mechanism. The magnitude is irrelevant for the use of the mechanism.
Since the magnitude of the combined force is irrelevant, the combined force
utilized in this chapter is determined by directly calculating the sum of the vectors
representing all of the range measurements. The resulting target direction is similar to the
one obtained by calculating the combined force of the repulsive potential field. Assuming
there are range measurements, the combined force is calculated as the following:
. (6.2)

121
Figure 67. Notional representation of eight range measurements around the ranging
measurement system. The terms R1 through R8 represent the distances
between the ranging measurement system and the obstacles. If there is no
obstacle within the maximum sensing range of the system, the max range
value will be represented. The filled circle represents the user carrying the
ranging measurement system. Note that the number of range
measurements will be based on the configuration of the ranging
measurement system. The use of eight measurements in this example is
only intended for illustrating the concept.
Figure 68. Repulsive potential field created by the eight notional range measurements
around the ranging measurement system.

122
Figure 69. Combined force of the potential field. The direction of the combined force
can be utilized as the target direction in the redirected-walking mechanism.
The term is the angle between the user’s heading direction and the target
direction in the physical environment.
4. Potential Field-Based Redirected-Walking Mechanism
The potential field-based redirected-walking mechanism can be constructed by
utilizing the target direction determined by calculating the combined force of the
potential field.
The block diagram of the mechanism is shown in Figure 70. The term is the
angle between the user’s heading direction and the target direction, the same as illustrated
in Figure 69. Different from the original redirected-walking mechanism, the direction
coefficient in the potential field-based mechanism is modified and replaced with the sine
of half the angle . Since the angle falls between degrees, the use of the sine of
the half angle is intended to render the value of direction coefficient between . In this
way, the more the user’s heading direction is turned away from the target direction, the

123
greater the direction coefficient will be produced. For example, the max angle (±180
degrees) will cause the maximum direction coefficient (±1) to be produced in the
potential field-based mechanism, instead of in the original mechanism. The angle is
calculated as the following:
, (6.3)
where the terms and are the weights of the combined force in the x and y axes,
respectively.
Figure 70. The potential field-based redirected-walking mechanism. The direction
coefficient is replaced with the sine of the half angle between the user’s
current heading direction and the target direction.
The scaled value (calculated by multiplying the maximum of the three candidates
of rotation rates with the direction coefficient) is not further compared with a threshold
value in the potential field-based mechanism, while such a procedure was conducted in
the original mechanism. Such an extra comparison step that clamps the scaled value to
the threshold does not offer a noted effect to the redirected-walking result and is therefore
omitted.
A rotation rate of 1.0 degree/second is adopted as the baseline rotation rate. Such
a rotation rate was experimentally determined in [44] as the detection threshold while the
user is standing still. The factors for determining the injected rotation rates proportional
to the magnitudes of linear and angular velocities can be adjusted for different operating

124
environments. In this study, the values of 13.0 and 0.2 are adopted. The two rotation rates
can be calculated as follows:
, (6.4)
. (6.5)
After the angular velocity to be injected is determined for the current frame, the
system (i.e., the locomotion interface) will induce a virtual environment rotation during
such a frame. The relationship between the system-induced virtual environment rotation
and the user-adjusted walking direction change is illustrated in Figure 71. (It should be
noted that the part describing the user’s decision/action is only one particular case used
for explaining the concept. Since the human decision/action is often unpredictable, this
may not be true for describing all cases.) The system part is a per-frame operation. As the
amount of the accumulated virtual environment rotation induced by the system becomes
larger, the user will notice that his/her walking direction deviates from the original route.
Ideally, the user will perceive such a deviation as his/her own motion. In order to follow
his/her original route, the user will adjust his/her walking direction. This is the way used
by the redirected-walking mechanism to steer the user’s walking direction.

125
Figure 71. Relationship between the system-induced VE rotation and the user-
adjusted walking direction change.
5. Mechanisms Addressing Particular Conditions Incorporated in the
Potential Field-Based Redirected-Walking Mechanism
As discussed earlier, the target direction is determined by calculating the
combined force of the potential field formed by the range measurements. Ideally, the
redirected-walking mechanism will steer the user towards the target direction to prevent
the user from colliding with the obstacles, such as walls. However, the user may
occasionally walk too close to the obstacles. Under such a circumstance, extra conditions
for determining the target direction need to be included in the mechanism. This can be
achieved by monitoring the values of the range measurements. The following two

126
conditions are used to decide whether or not the calculated target direction needs to be
replaced and what the replacement will be.
In coping with the short distance (from obstacles) on the user’s left or
right side, if the value of the minimum range measurement is less than a
threshold value, the new target direction is directly opposite to that of the
vector representing such a range measurement. This is intended to
accelerate the process of redirecting the user’s physical walking direction
away from obstacles. Note that the threshold value can be adjusted for
different operating environments. A value of 4.0 (in meters) is adopted in
this study.
In coping with the short distance (from obstacles) in front of the user, if
the range measurement of the front step is shorter than a range threshold,
and the magnitude of the angle between the original target direction and
the user’s current heading direction is smaller than the angle threshold, the
new target direction adopted is directly opposite to the user’s current
heading direction. This renders the value of direction coefficient either
or according to the sign of the angle between the original target
direction and the user’s heading direction. Such a value will be in effect
until the range measurement of the front step becomes longer than the
range threshold again. This situation usually occurs when the user is
walking directly towards a wall with the potential field of the range
measurements being approximately symmetric on both the user’s sides,
which causes the direction of combined force (i.e., target direction) to
always point forward. The means adopted is to keep steering the user’s
walking direction to the right (direction coefficient = ) or to the left
(direction coefficient = ) until the user’s forward space becomes open
again. Note that the values of the range and angle thresholds can be
adjusted for different operating environments. In this study, a value of
10.0 (in meters) is used for the range threshold, while a value of 5.0 (in
degrees) is used for the angle threshold.
The flowchart of the process cycle including the two conditions for determining
the target direction is illustrated in Figure 72.

127
Figure 72. Flowchart of the process cycle determining the target direction.
C. EXPERIMENT RESULT
The result of an experiment using the locomotion interface developed in the
previous chapter incorporated with the potential field-based redirected-walking
mechanism is shown in Figure 73. The experiment was conducted in the Barbara McNitt
Ballroom of the Naval Postgraduate School, as shown in Figure 74. In this experiment,
the user wearing the head-mounted display was immersed in a virtual environment of a
farm, and was instructed to walk in a straight line path.

128
Figure 73. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the Ballroom of
the Naval Postgraduate School). The approximate dimensions of the
physical environment are 48 x 15 meters.
The line-based map represents the boundary of the physical environment where
the experiment was conducted. It was obtained beforehand by conducting the map-
building process discussed in Chapter IV. The curve in red represents the virtual

129
trajectory that was recorded using the built-in methods of the Panda3D and Python
libraries. The curve in blue represents the real trajectory in the physical environment. It
was determined by conducting scan matching between the map built beforehand and
every scan taken throughout the experiment by the ranging measurement system. Since
the potential field-based redirected-walking mechanism adopts a relative approach, the
localization process is not required during operation. Therefore, the real trajectory was
built off-line only for visualizing the redirected-walking result. It is noted that the real
trajectory and virtual trajectory coincide at ( , ) at the beginning of the experiment. As
the experiment progresses, while the virtual trajectory follows a more or less straight path
extending beyond the physical boundary, the real walking direction was constantly
steered away from the boundary of the physical environment regardless the virtual
walking direction. The locomotion interface combined with the potential field-based
redirected-walking mechanism is thus verified for the use of virtual environment systems
to overcome the limitation in the dimensions of the physical environments.
Figure 74. The physical environment for conducting the experiments using the
locomotion interface developed in the previous chapter incorporated with
the potential field-based redirected-walking mechanism. The picture was
taken in the Barbara McNitt Ballroom of the Naval Postgraduate School.

130
The result of another experiment conducted in the same physical environment is
shown in Figure 75. In this experiment, the user was instructed to walk randomly in the
virtual environment. The starting position for both the real and virtual trajectories is at
( , ). It is seen that the real trajectory shown in blue is confined within the physical
boundary as it should be. The virtual trajectory shown in red extends far beyond the
boundary, which indicates that the user is allowed to explore a virtual environment much
larger than the physical environment.
Figure 75. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the Ballroom of
the Naval Postgraduate School). The approximate dimensions of the
physical environment are 48 x 15 (meters).

131
To further demonstrate the utility of the locomotion interface and the redirected-
walking mechanism, another set of experiments was conducted in a different physical
environment, that is, in the basketball court located in the Fitness Center Building of the
Naval Postgraduate School, as shown in Figure 76. The real and virtual trajectories from
two of the experiments conducted in this environment are presented in Figure 77 and
Figure 78. The results were similar to those in the previous two experiments conducted in
the Ballroom.
Figure 76. The physical environment for conducting the experiments using the
locomotion interface developed in the previous chapter incorporated with
the potential field-based redirected-walking mechanism. The picture was
taken in the basketball court located in the Fitness Center Building of the
Naval Postgraduate School.

132
Figure 77. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the basketball
court in the gym of the Naval Postgraduate School). The approximate
dimensions of the physical environment are 22 x 35 (meters).

133
Figure 78. Comparison between the real trajectory (in blue) and the virtual trajectory
(in red) of the user. Both of the trajectories start at ( , ). The line-based
map represents the boundary of the physical environment (the basketball
court in the gym of the Naval Postgraduate School). The approximate
dimensions of the physical environment are 22 x 35 (meters).
D. LIMITATIONS
The inertial/magnetic sensor-based locomotion interface integrated with the
potential field-based redirected-walking mechanism can be used to overcome the space
limitation of the physical environment. The user is able to navigate through virtual
environments that are much larger than the available physical space. For safety

134
considerations, such an integrated locomotion interface needs to be operated under the
following conditions and limitations:
The use of the integrated locomotion interface requires a flat level
physical space. Since the user using a head-mounted display is not able to
see the physical environment, any uneven surface may cause imbalance
and is not safe for operating.
It requires an open physical space. Although the potential field-based
redirected-walking mechanism is able to avoid static (or moving)
obstacles in the physical environment that are detectable by the ranging
measurement system, it is still possible for the user to collide with them
when they are present. The conditions under which the collisions may
occur depend on many factors (such as the user’s speed, the values of the
adjustable parameters of the mechanism, the available physical space, and
the way the user walks) or a combination of factors, and such conditions
may not be duplicable. For safety considerations, it is necessary to remove
any removable obstacles before operating. For experiments conducted in
this dissertation, all the objects were moved toward the boundaries (walls)
of the physical environment to offer a more open center space.
The required size of the available physical space depends on many factors
(such as the user’s speed, the values of the adjustable parameters of the
mechanism, and the way the user walks) and is currently undetermined.
However, it is noted that the larger the physical space is, the less possible
it is for the user to collide with obstacles. For example, a basketball court-
sized environment is more suitable than a regular hallway environment.
The maximum user speed for safely operating the integrated locomotion
interface is currently undetermined. This is also one of various situations
under which a quantitative evaluation is difficult to conduct. One similar
real-life example is that the maximum speed a motor vehicle can achieve
before it crashes into something is difficult to determine because such a
value depends on all kinds of factors, and it is unsafe to experiment.
Currently, the best way to avoid collision is to specify a limit. While the
integrated locomotion interface may be capable of being used for running
motions, for it to be safely operated, it is required to limit the user motions
to the normal walking speed to avoid unpredictable situations.
Parts of the research conducted in this and previous chapters focused on the
development of a locomotion interface. Such a locomotion interface has a similar concept
as other existing locomotion interfaces in that it acts as an input generator to control the
user’s motions in virtual environments. Therefore, the efforts were mainly to achieve
higher portability and immersion. The security or privacy issues which are of great
concern when accessing the on-line virtual environments were not considered.

135
E. SUMMARY
This chapter presented a ranging measurement system-based redirected-walking
mechanism. Such an improved redirected-walking mechanism utilizes the potential field
of range measurements provided by the ranging measurement system and calculates an
angular velocity to be injected into virtual environments to steer the user’s walking
direction away from obstacles in the physical environment.
The main contribution of this chapter is the development of the potential field-
based redirected-walking mechanism using a ranging measurement system. It was
designed to be integrated with the inertial/magnetic sensor-based locomotion interface for
avoiding obstacles in the physical environment when navigating through virtual
environments.

136
THIS PAGE INTENTIONALLY LEFT BLANK

137
VII. CONCLUSION AND RECOMMENDATIONS
This chapter summarizes the major contributions of this dissertation and provides
recommendations for future work. The main focus of the research was to develop a
locomotion interface that would contribute to self-contained, portable, and immersive VE
systems. The developed locomotion interface allows the user to use natural walking
motions to navigate through virtual environments. As a means of building such a
locomotion interface, the feasibility of utilizing an inertial/magnetic sensor-based system
and a ranging measurement system was investigated. Algorithms for the two individual
systems and for the integrated system were developed to provide the necessary
functionalities of the locomotion interface.
A. CONTRIBUTIONS
The main contribution of this dissertation is the development of a novel
locomotion interface using the integration of inertial/magnetic measurement units and a
ranging measurement system. Such an integrated locomotion interface contributes to the
construction of self-contained, portable, and immersive VE systems that are able to
operate in arbitrary open spaces. The specific contributions are summarized as follows.
A new, real-time, line-based map-building and localization process was
developed. Such a process utilizes the information of the physical
environment collected by the ranging measurement system to build the 2D
line-based map and to estimate the orientation and position of the user
within this map. The process was constructed based on the original
iterative closest point (ICP) algorithm. New mechanisms including an
outlier rejection mechanism and a local minimum escape mechanism were
developed to improve the scan-matching result of the ICP algorithm. A
new line feature-based transformation correction mechanism was
developed for further correcting the residual scan-matching error.
A new concept of separating the map-building and localization processes
was proposed and implemented for the HIVE-like (i.e., simple
rectangular-shaped) environments to obtain better map-building and
localization results.
A new locomotion interface was developed using the inertial/magnetic
sensor modules. Such a locomotion interface utilizes the motions detected
by the inertial/magnetic measurement units attached to the user’s head and

138
foot and relates them to the virtual head and walking motions. It allows the
use of natural walking motions to navigate through virtual environments.
A new redirected-walking mechanism was developed using a ranging
measurement system. Such a mechanism can be integrated with the
inertial/magnetic sensor-based locomotion interface in contribution to the
construction of self-contained, portable, and immersive VE systems. It
features a new, potential field-based redirected-walking mechanism used
to redirect the user’s walking direction away from obstacles (such as walls)
in the physical environment when navigating through virtual environments.
A relative obstacle avoidance approach is adopted in this mechanism.
Such an approach utilizes only the local information of the environment
from one single scan of the ranging measurement system at the current
moment.
B. RECOMMENDATIONS FOR FUTURE WORK
The presented ranging measurement system-based redirected-walking mechanism
utilizes the relative obstacle avoidance approach. Such a mechanism is effective for
avoiding obstacles when there is only one user in the physical environment at a time.
For the future development, the use for multiple users in the same physical
environment at the same time may be taken into consideration. The relative obstacle
avoidance approach that reacts only based on the local information obtained from one
single scan of the ranging measurement system may not be sufficient to avoid collision
among all the users. There may be a need to adopt the absolute obstacle avoidance
approach. Such an approach is to utilize the complete knowledge of the physical
environment (such as the global map describing the obstacle/boundary information) and
the user’s orientation and position within the physical environment. Furthermore, the
absolute approach may also need to keep track of the orientation/position information of
all the other users for the multi-user application in the same physical environment.
Therefore, certain mechanisms may need to be incorporated for sharing such information
among all the users.
Although it is supposable that the absolute approach maintaining the complete
knowledge regarding the physical environment and all the users may be able to provide
proactive collision avoidance, the means to utilize such knowledge for achieving the
desired results is still undetermined. Therefore, algorithms may need to be developed for
realizing such a concept in the future development of the redirected-walking mechanism.

139
Further consideration for future work may be to refine the map-building and
localization process by investigating different sensing techniques, and determining the
scan representations and scan-matching algorithms that best complement the chosen
sensing techniques. Such process may contribute to the development of the redirected-
walking mechanism using the absolute approach. For other applications, such as the 3D
modeling, the map-building and localization process may be modified to utilize a 3D
rangefinder (scanner) for building the 3D models of the physical environments.
The locomotion interface may also be further refined by investigating alternative
sensor modules to be used and locations to be mounted with the chosen sensor modules.
The arm and hand motions may also be incorporated into the locomotion interface for
providing users a more immersive experience.
Studies may be conducted to investigate the performance of the developed
locomotion interface, which is currently difficult to quantify. Furthermore, the
psychological and physiological issues associated with the use of such a locomotion
interface may also need to be addressed in the future work.
The recommendations for future development discussed earlier were not meant to
be comprehensive. Additional effort may still be required before this dissertation work
may be used for actual applications in education and training.

140
THIS PAGE INTENTIONALLY LEFT BLANK

LIST OF REFERENCES
[1] Bob G. Witmer and Michael J. Singer, “Measuring presence in virtual environments: A presence questionnaire,” Presence, vol. 7, no. 3, June 1998, pp. 225‒240.
[2] Shaleph O’Neill, “Presence, place and the virtual spectacle,” PsychNology Journal, vol. 3, no. 2, 2005, pp. 149‒161.
[3] Ioannis Messinis, Dimitrios Saltaouras, Panayotis Pintelas, and T.A. Mikropoulos, “Investigation of the relation between interaction and sense of presence in educational virtual environments,” International Conference on e-Education, e-Business, e-Management and e-Learning, 2010, pp. 428‒431.
[4] Mel Slater, Anthony Steed, John McCarthy, and Francesco Maringelli, “The influence of body movement on subjective presence in virtual environments,” Human Factors, vol. 40, no. 3, 1998, pp. 469‒477.
[5] SENSICS. (2010, Oct.). xSight and piSight Head Mounted Displays User’s Guide. Columbia, MD.
[6] Carolina Cruz-Neira, Daniel J. Sandin. Tomas A. DeFanti, Robert V. Kenyon, and John C. Hart, “The cave: audio visual experience automatic virtual environment,” Communications of the ACM, vol. 35, no. 6, pp. 65‒72.
[7] Wikimedia Commons, “File:CAVE Crayoland.jpg.” [Online]. Accessed Dec. 16, 2013. Available: http://commons.wikimedia.org/wiki/File:CAVE_Crayoland.jpg.
[8] Wikimedia Commons, “File:Vehicle simulator.jpg.” [Online]. Accessed Dec. 16, 2013. Available: http://commons.wikimedia.org/wiki/File:Vehicle_simulator.jpg
[9] University of Utah School of Computing, “Locomotion display.” [Online]. Accessed Dec. 16, 2013. Available: http://www.cs.utah.edu/research/areas/ve/LocomotionDisplay.html.
[10] Abhijeet Vijayakar and John M. Hollerbach, “A proportional control strategy for realistic turning on linear treadmills,” Proceedings of the 10th Symp. On Haptic Interfaces for Virtual Envir. & Teleoperator Systs., 2002, pp. 231‒238.
[11] Hiroo Iwata, “The Torus treadmill: realizing locomotion in VEs,” IEEE Computer Graphics and Applications, Nov/Dec 1999, vol. 19, pp 30‒35.
[12] Hiroo Iwata, “Walking about virtual environments on an infinite floor,” Proceedings of the IEEE Virtual Reality, 1999, pp. 286‒293.
[13] Rudolph P. Darken, William R. Cockayne, and David Carmein, “The omni-directional treadmill: A locomotion device for virtual worlds,” Proceedings of UIST, Banff, Canada, Oct. 14–17, 1997, pp. 213‒221.
[14] Laroussi Bouguila and Makoto Sato, “Virtual locomotion system for large-scale virtual environment,” Proceedings of the IEEE Virtual Reality, 2002, pp. 292‒292.
141

142
[15] Jia Wang and Robert W. Lindeman, “Comparing isometric and elastic surfboard
interfaces for leaning-based travel in 3D virtual environments,” IEEE Symposium
on 3D User Interfaces, Orange County, CA, Mar. 4–5, 2012, pp. 31‒38.
[16] NVIS, “nVisor SX60.” [Online]. Accessed Dec 18, 2013. Available:
http://www.nvisinc.com/product.php?id=16.
[17] InterSense, “InertiaCube2+.” [Online]. Accessed Dec 16, 2013. Available:
http://www.intersense.com/pages/18/55/.
[18] LORD MicroStrain Sensing System, “3DM-GX3-25.” [Online]. Accessed Dec 16,
2013. Available: http://www.microstrain.com/inertial/3DM-GX3-25.
[19] Hokuyo, “UTM-30LX.” [Online]. Accessed Dec 16, 2013. Available:
http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html.
[20] John Folkesson, John Leonard, Jacques Leederkerken, and Rob Williams,
“Feature tracking for underwater navigation using sonar,” Proceedings of the
2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San
Diego, CA, Oct 29 - Nov 2, 2007, pp. 3678–3684.
[21] Richard J. Rikoski and John J. Leonard, “Trajectory sonar perception,”
Proceedings of the 2003 IEEE International Conference on Robotics &
Automations, Taipei, Taiwan, Sept 14–19, 2003, pp.963-970.
[22] Michael Brady, Hugh Durrant-Whyte, Huosheng Hu, John Leonard, Penelope
Probert, and B. S. Y. Rao, “Sensor-based control of AGVs,” Computing &
Control Engineering Journal, March, 1990, pp. 64–70.
[23] Chuan Hao Yang, “A person-tracking mobile robot using an ultrasonic
positioning system,” MS Thesis, Naval Postgraduate School, Dec 2005.
[24] Hokuyo Automatic. (2005, Oct.). Scanning Laser Range Finder URG-04LX
Specifications. Osaka, Japan.
[25] Hokuyo Automatic. (2011, Nov.). Scanning Laser Range Finder UTM-30LX-EW
Specification. Osaka, Japan.
[26] MicroStrain. (2009). Technical Product Overview 3DM-GX3-25 Miniature
Attitude Heading Reference System. Williston, VT.
[27] InterSense. (2001). InertiaCube2 Bringing 3D To Life Manual for Serial Port
Model. Burlington, MA.
[28] Xiaoping Yun, Eric R. Bachmann, Hyatt Moore IV, and James Calusdian, “Self-
contained position tracking of human movement using small inertial/magnetic
sensor modules,” Proceedings of the 2007 IEEE International Conference on
Robotics and Automation, Roma, Italy, April 10–14, 2007.
[29] James Calusdian, “A personal navigation system based on inertial and magnetic
field measurements,” Doctoral dissertation, Naval Postgraduate School,
September 2010.

143
[30] Xiaoping Yun, James Calusdian, Eric Bachmann, and Robert McGhee,
“Estimation of human foot motion during normal walking using inertial and
magnetic sensor measurements,” IEEE Transactions on Instrumentation and
Measurement, Vol. 61, No. 7, July 2012, pp. 2059–2072.
[31] Xiaoping Yun, Eric Bachmann, and Robert B. McGhee, “A simplified quaternion-
based algorithm for orientation estimation from earth gravity and magnetic field
measurements,” IEEE Transaction on Instrumentation and Measurement, Vol. 57,
No. 3, March, 2008, pp. 638–650.
[32] John J. Leonard and Hugh F. Durrant-Whyte, “Simultaneous map building and
localization for an autonomous mobile robot,” IEEE/RSJ International Workshop
on Intelligent Robots and Systems IROS, Osaka, Japan, Nov 3–5, 1991, pp.1442-
1447.
[33] Christopher M. Smith, John J. Leonard, Andrew A. Bennett, and Christopher
Shaw, “Feature-based concurrent mapping and localization for AUVs,”
Proceedings of the MTS/IEEE Conference on Oceans, vol. 2, 1997, pp. 896–901.
[34] Hugh Durrant-Whyte and Tim Bailey, “Simultaneous localization and mapping:
part I,” IEEE Robotics and Automation Magazine, June 2006, pp. 99–108.
[35] Hugh Durrant-Whyte and Tim Bailey, “Simultaneous localization and mapping
(SLAM): part II,” IEEE Robotics and Automation Magazine, September 2006, pp.
108–117.
[36] Francesco Amigoni, Simone Gasparini, and Maria Gini, “Building segment-based
maps without pose information,” Proceedings of the IEEE, Vol. 94, No. 7, 2006,
pp. 1340–1359.
[37] Francesco Amigoni, Simone Gasparini, and Maria Gini, “Good experimental
methodologies for robotic mapping: a proposal,” Proceedings of the 2007 IEEE
International Conference on Robotics and Automation, Roma, Italy, April 10–14,
2007, pp. 4176–4181.
[38] Alberto Elfes, “Sonar-based real-world mapping and navigation,” IEEE Journal
of Robotics and Automation, Vol. RA-3, No. 3, June 1987, pp. 249–265.
[39] Xue-Cheng Lai, Cheong-Yeen Kong, Shuzhi Sam Ge, and Abdullah Al Mamun,
“Online map building for autonomous mobile robots by fusing laser and sonar
data,” Proceedings of the IEEE International Conference on Mechatronics &
Automation, Niagara Falls, Canada, July 2005, pp. 993–996.
[40] Edwin Olson, John Leonard, and Seth Teller, “Fast iterative alignment of pose
graphs with poor initial estimates,” Proceedings of the 2006 IEEE International
Conference on Robotics and Automation, Orlando, Florida, May, 2006, pp. 2262–
2269.
[41] Jack Collier, and Alejandro Ramirez-Serrano, “Environment classification for
indoor/outdoor robotic mapping,” Proceedings of the 2009 Canadian Conference
on Computer and Robot Vision, 2009, pp. 276–283.

144
[42] Sharif Razzaque, Zachariah Kohn, and Mary C. Whitton, “Redirected walking,”
Eurographics, 2001.
[43] Sharif Razzaque, David Swapp, Mel Slater, Mary C. Whitton, and Anthony Steed,
“Redirected walking in place,” Eight Eurographics Workshop on Virtual
Environments, 2002, pp. 123–129.
[44] Sharif Razzaque, “Redirected walking,” Doctoral dissertation, University of
North Carolina, Chapel Hill, 2005.
[45] Tabitha C. Peck, Mary C. Whitton, and Henry Fuchs, “Evaluation of reorientation
techniques for walking in large virtual environments,” IEEE Conference on
Virtual Reality, Reno, Nevada, March 8–12, 2008, pp. 121–127.
[46] Tabitha C. Peck, Henry Fuchs, and Mary C. Whitton, “Evaluation of reorientation
techniques and distractors for walking in large virtual environments,” IEEE
Transactions on Visualization and Computer Graphics, Vol. 15, No. 3, May/Jun
2009, pp. 383–394.
[47] Tabitha C. Peck, Henry Fuchs, and Mary C. Whitton, “Improved redirection with
distractors: a large-scale-real-walking locomotion interface and its effect on
navigation in virtual environments,” IEEE Conference on Virtual Reality,
Waltham, Massachusetts, March 20–24, 2010, pp.35-38.
[48] Tabitha C. Peck, Henry Fuchs, and Mary C. Whitton, “The design and evaluation
of a large-scale real-walking locomotion interface,” IEEE Transactions on
Visualization and Computer Graphics, Vol. 18, No. 7, July, 2012, pp. 1053–1067.
[49] Radu Gabriel Danescu, “Obstacle detection using dynamic particle-based
occupancy grids,” IEEE International Conference on Digital Image Computing
Techniques and Applications, 2011, pp.585-590.
[50] Marcus Konrad, Dominik Nuss, and Klaus Dietmayer, “Localization in digital
maps for road course estimation using grid maps,” IEEE Intelligent Vehicles
Symposium, Alcala de Henares, Spain, June 3–7, 2012, pp. 87–92.
[51] Paul J. Besl and Neil D. McKay, “A method for registration of 3-D shapes,” IEEE
Transaction on Pattern Analysis and Machine Intelligence, Vol. 14, No. 2,
February 1992.
[52] Haili Chui and Anand Rangarajan, “A new point matching algorithm for non-rigid
registration,” Computer Vision and Image Understanding - Special issue on
nonrigid image registration, Volume 89 Issue 2–3, pp. 114–141, February 2003.
[53] Berthold K. P. Horn, “Closed-form solution of absolute orientation using unit
quaternions,” Journal of the Optical Society of America A, Vol. 4, pp. 629, April
1987.
[54] Jeff M. Phillips, Ran Liu, and Carlo Tomasi, “Outlier robust ICP for minimizing
fractional RMSD,” Proceedings of the IEEE International Conference on 3-D
Digital Imaging and Modeling, 2007, pp. 427–434.

145
[55] Szymon Rusinkiewicz and Marc Levoy, “Efficient variants of the ICP algorithm,”
Proceedings of the IEEE International Conference on 3-D Digital Imaging and
Modeling, 2001, pp. 145–152.
[56] S. May, D. Droeschel, D. Holz, S. Fuchs, and A. Nuchter, “Robust 3D-mapping
with time-of-flight cameras,” Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, St. Louis, Missouri, USA, 2009,
pp. 1673–1678.
[57] Dirk Holz and Sven Behnke, “Sancta simplicitas–on the efficiency and achievable
results of SLAM using ICP-based incremental registration,” Proceedings of the
2010 IEEE International Conference on Robotics and Automation, Anchorage,
Alaska, USA, May 3–8, 2010, pp. 1380–1387.
[58] Songrit Maneewongvatana and David M. Mount, “It’s ok to be skinny, if your
friends are fat,” Center for Geometric Computing 4th Annual Workshop on
Computational Geometry, 1999.
[59] Mark A. Haidekker, “ The Hough transform,” in Advanced Biomedical Image
Analysis, John Wiley & Sons, 2011, ch. 7, pp. 211–235.
[60] Xiaoping Yun, Khine Latt and J.Scott Glennon, “Mobile robot localization using
the Hough transform,” Proceeding of the 1998 IEEE ISIC/CIRA/ISAS Joint
Conference Gaithersburg, MD, September 14–17, 1998.
[61] David Waller, Eric Bachmann, and Eric Hodgson, “The HIVE: A huge immersive
virtual environment for research in spatial cognition,” Behavior Research
Methods, Nov 2007, 39 (4), pp. 835–843.
[62] Stuart J. Russell and Peter Norvig, “Hill-climbing search,” in Artificial
Intelligence: A Modern Approach, 3rd ed., New Jersey, Pearson Education, 2010,
ch. 4, sec. 1, pp. 122–125.
[63] Stuart J. Russell and Peter Norvig, “Simulated annealing,” in Artificial
Intelligence: A Modern Approach, 3rd ed., New Jersey, Pearson Education, 2010,
ch. 4, sec. 1, pp. 125.
[64] Wikipedia, “First-person (video games).” [Online]. Accessed Dec 16, 2013.
Available: https://en.wikipedia.org/wiki/First-person_(video_games).
[65] Nintendo, “Wii.” [Online]. Accessed Dec 16, 2013. Available:
http://www.nintendo.com/wii/what-is-wii/.
[66] Microsoft, “Kinect for XBox 360.” [Online]. Accessed Dec 16, 2013. Available:
http://www.xbox.com/en-US/xbox360/accessories/kinect/KinectForXbox360.
[67] Microsoft, “KINECT for Windows.” [Online]. Accessed Dec 16, 2013. Available:
http://www.microsoft.com/en-us/kinectforwindows/.
[68] John Hollerbach, David Grow, and Craig Parker, “Developments in locomotion
interfaces,” Proceedings of the 2005 IEEE 9th International Conference on
Rehabilitation Robotics, Chicago, IL, June 28 - July 1, 2005, pp. 522–525.

146
[69] Murat Onder, “Locomotion in virtual environments and analysis of a new virtual
walking device,” MS Thesis, Naval Postgraduate School, Mar 2005.
[70] Mary Whitton, “Getting from here to there: locomotion in virtual environments,”
2010 IEEE/ACM 14th International Symposium on Distributed Simulation and
Real Time Applications, 2010.
[71] Michael A. Goodrich, “Potential field tutorial,” Lecture Notes, Brigham Young
University, Provo, UT, 2002.

147
INITIAL DISTRIBUTION LIST
1. Defense Technical Information Center
Ft. Belvoir, Virginia
2. Dudley Knox Library
Naval Postgraduate School
Monterey, California










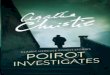



![Locomotion [2014]](https://img.pdfslide.net/doc/110x75/5564e3eed8b42ad3488b4e94/locomotion-2014.jpg)




![Locomotion [2015]](https://img.pdfslide.net/doc/110x75/55d39c9ebb61ebfd268b46a2/locomotion-2015.jpg)