Embed Size (px)
Citation preview
DRAGAS DE CORTE Y DRAGAS DE CORTE Y SUCCIÓNSUCCIÓN
HYPACK 2013HYPACK 2013
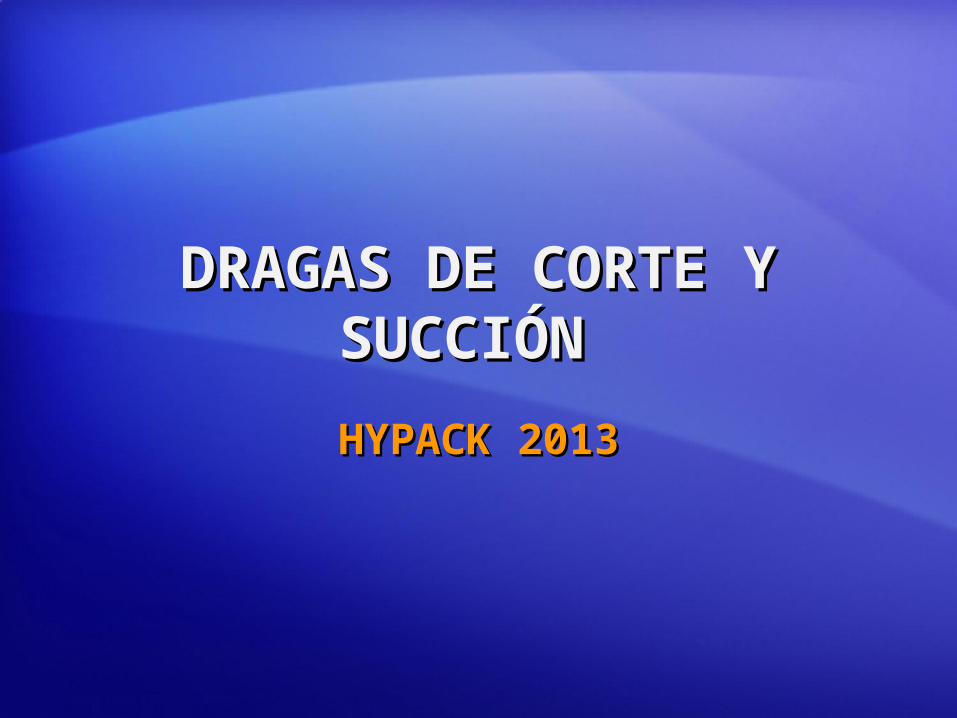
Corte y Succión ConfiguraciónCorte y Succión Configuración
Necesitado:Necesitado: Posición DragaPosición Draga Posición Cabeza de CortePosición Cabeza de Corte DragaDraga Orientación Orientación Profundidad Profundidad
Cutter Head DepthCutter Head DepthMóvil = PrincipalMóvil = Principal Móvil = Herramienta de Móvil = Herramienta de
DragadoDragado
MuñónMuñón
• Posición (GPS)Posición (GPS)
• Orientación (Giro, GPS)Orientación (Giro, GPS)
• Inclinación del BrazoInclinación del Brazo
• Marea & CaladoMarea & Calado
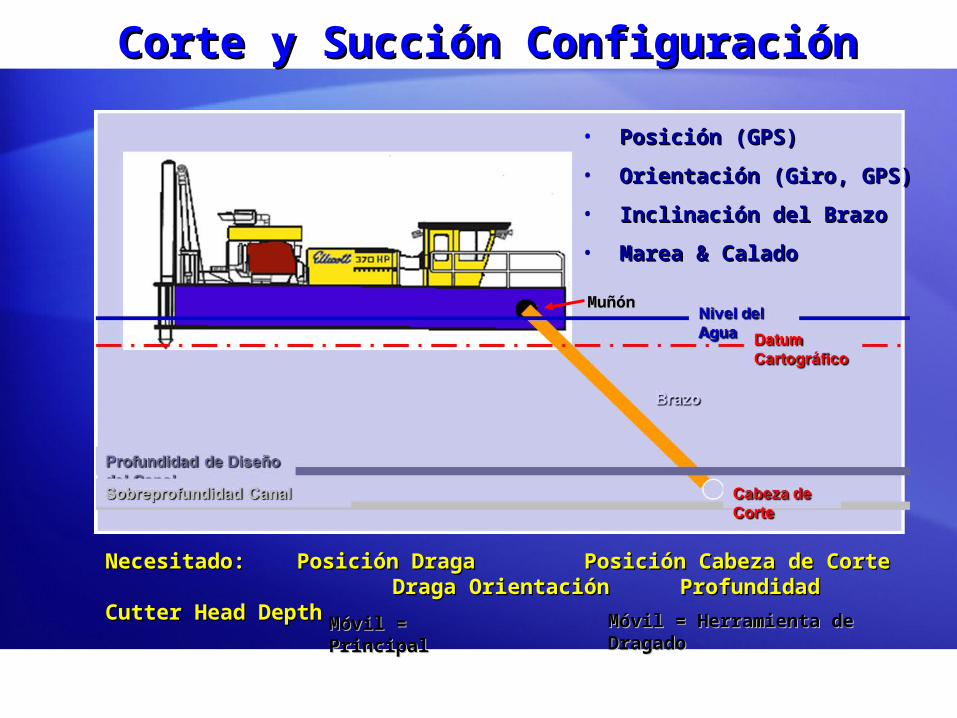
ConfiguraciónConfiguración
• Agregue el GPS.DLL a su móvil “Bote”.
• Cree un 2do móvil y llámelo ‘Cutter’.
• Agregue el Inclinometro.DLL al segundo móvil.
Agregue el Inclinometro.DLL al segundo móvil.
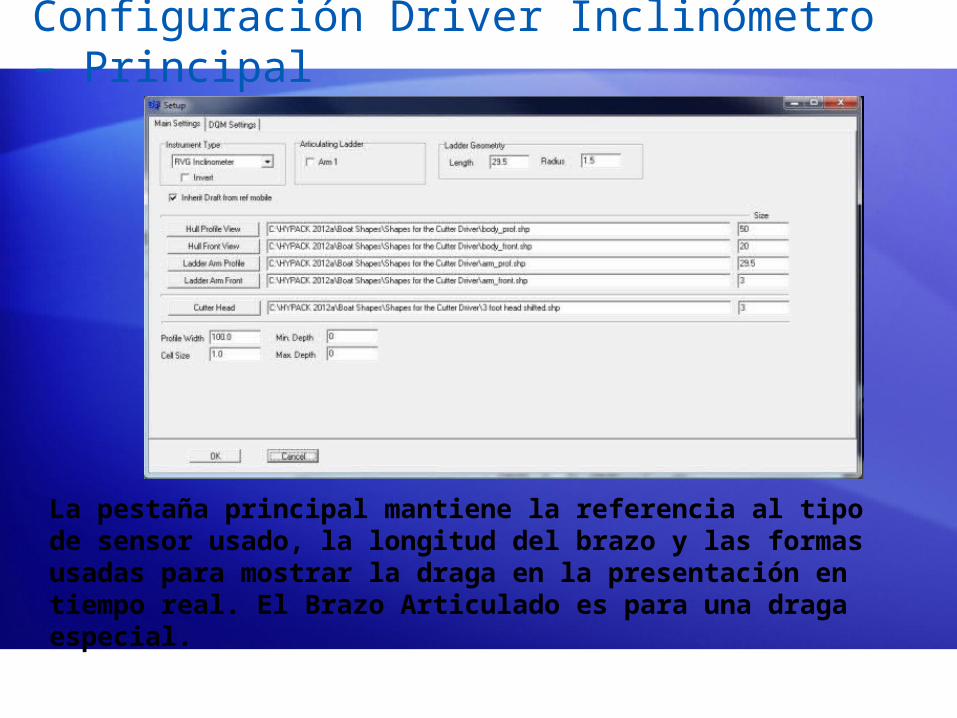
Configuración Driver Inclinómetro – Principal
La pestaña principal mantiene la referencia al tipo de sensor usado, la longitud del brazo y las formas usadas para mostrar la draga en la presentación en tiempo real. El Brazo Articulado es para una draga especial.
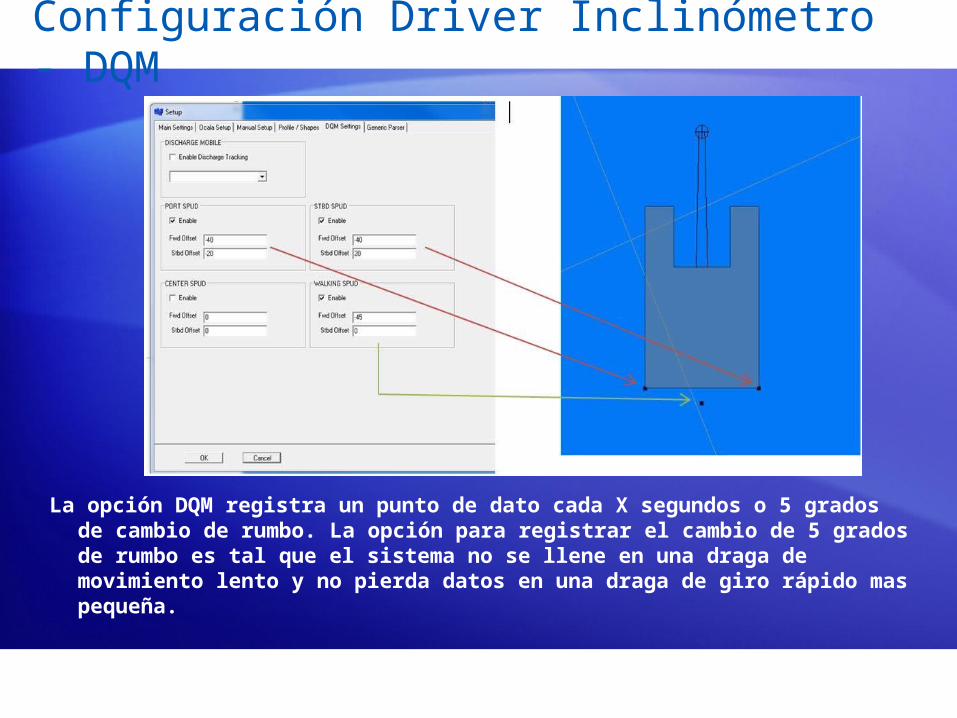
Configuración Driver Inclinómetro - DQM
La opción DQM registra un punto de dato cada X segundos o 5 grados de cambio de rumbo. La opción para registrar el cambio de 5 grados de rumbo es tal que el sistema no se llene en una draga de movimiento lento y no pierda datos en una draga de giro rápido mas pequeña.
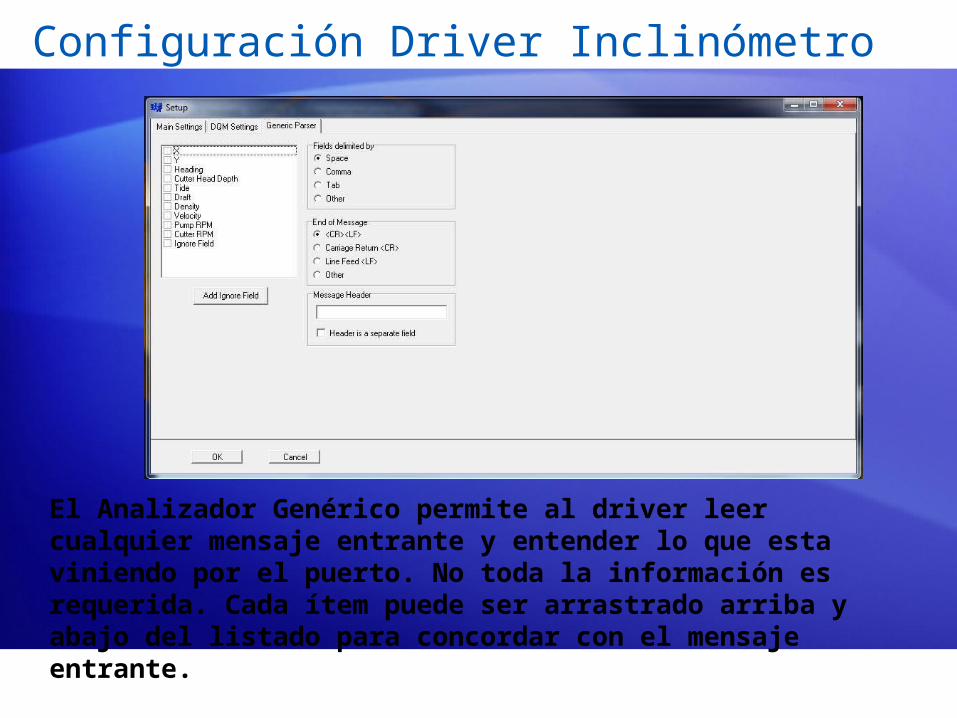
Configuración Driver Inclinómetro
El Analizador Genérico permite al driver leer cualquier mensaje entrante y entender lo que esta viniendo por el puerto. No toda la información es requerida. Cada ítem puede ser arrastrado arriba y abajo del listado para concordar con el mensaje entrante.
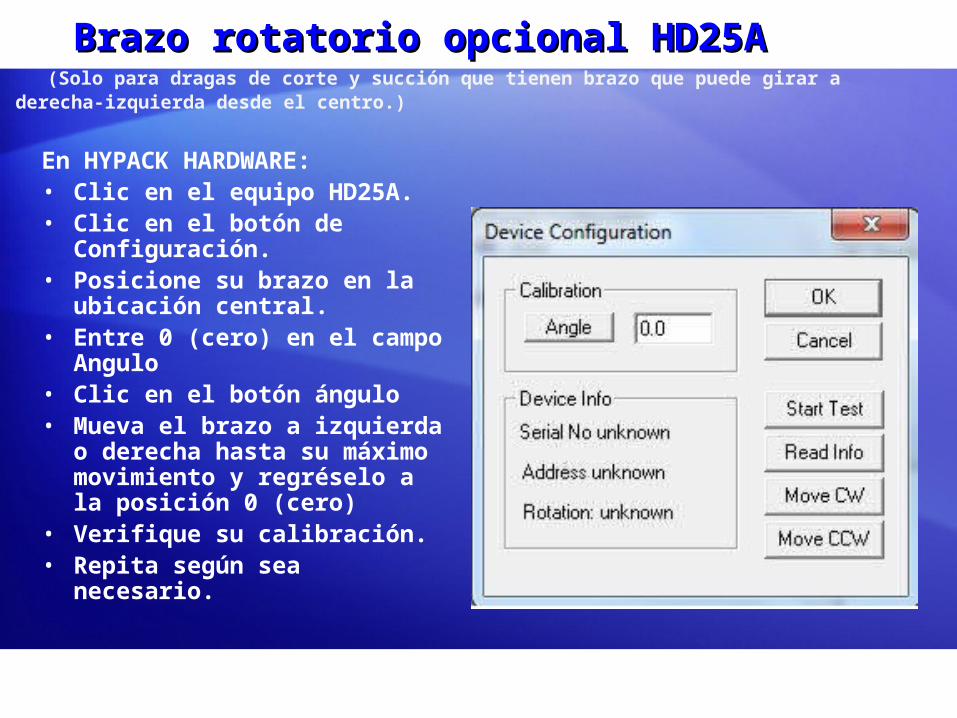
Brazo rotatorio opcional HD25ABrazo rotatorio opcional HD25A (Solo para dragas de corte y succión que tienen brazo que puede girar a derecha-izquierda desde el centro.)
En HYPACK HARDWARE:• Clic en el equipo HD25A.• Clic en el botón de
Configuración.• Posicione su brazo en la
ubicación central.• Entre 0 (cero) en el campo
Angulo• Clic en el botón ángulo• Mueva el brazo a izquierda o
derecha hasta su máximo movimiento y regréselo a la posición 0 (cero)
• Verifique su calibración.• Repita según sea necesario.
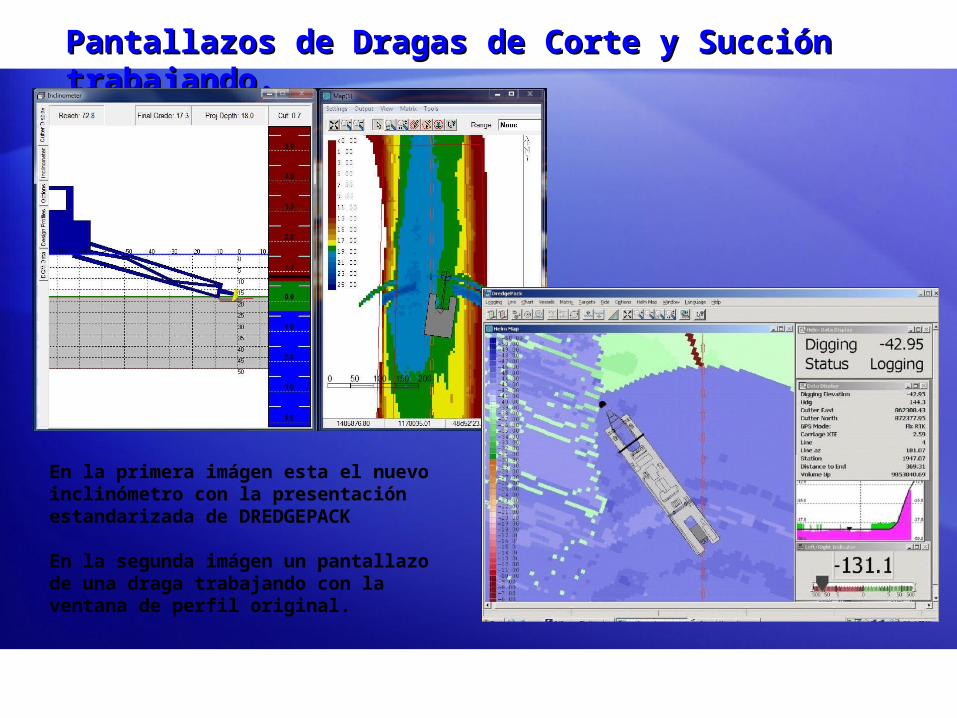
Pantallazos de Dragas de Corte y Succión trabajando.Pantallazos de Dragas de Corte y Succión trabajando.
En la primera imágen esta el nuevo inclinómetro con la presentación estandarizada de DREDGEPACK
En la segunda imágen un pantallazo de una draga trabajando con la ventana de perfil original.
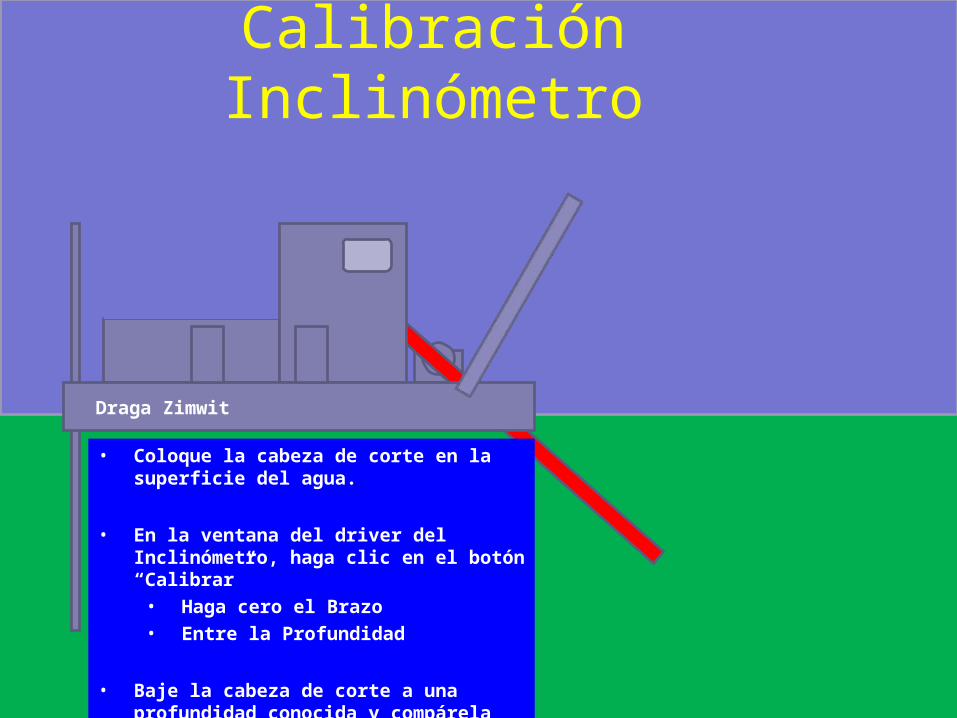
Draga Zimwit
Calibración Inclinómetro
• Coloque la cabeza de corte en la superficie del agua.
• En la ventana del driver del Inclinómetro, haga clic en el botón “Calibrar”
• Haga cero el Brazo• Entre la Profundidad
• Baje la cabeza de corte a una profundidad conocida y compárela con la profundidad mostrada en el programa SURVEY.
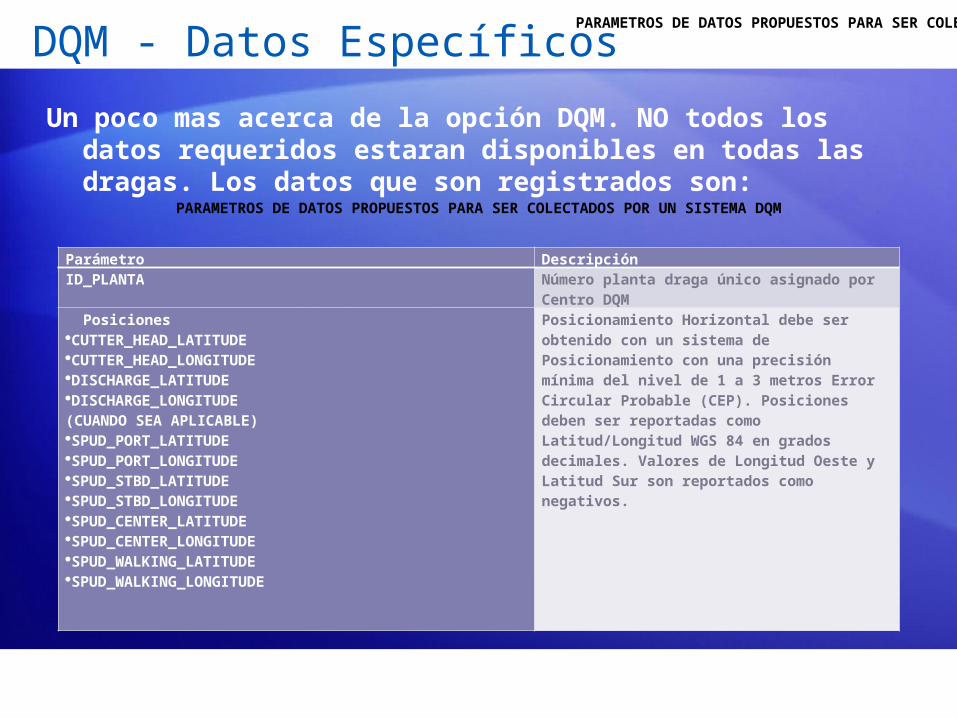
Un poco mas acerca de la opción DQM. NO todos los datos requeridos estaran disponibles en todas las dragas. Los datos que son registrados son:
PARAMETROS DE DATOS PROPUESTOS PARA SER COLECTADOS POR UN SISTEMA DQM
Parámetro DescripciónID_PLANTA Número planta draga único asignado por Centro
DQM PosicionesCUTTER_HEAD_LATITUDECUTTER_HEAD_LONGITUDEDISCHARGE_LATITUDEDISCHARGE_LONGITUDE(CUANDO SEA APLICABLE)SPUD_PORT_LATITUDESPUD_PORT_LONGITUDESPUD_STBD_LATITUDESPUD_STBD_LONGITUDESPUD_CENTER_LATITUDESPUD_CENTER_LONGITUDESPUD_WALKING_LATITUDESPUD_WALKING_LONGITUDE
Posicionamiento Horizontal debe ser obtenido con un sistema de Posicionamiento con una precisión mínima del nivel de 1 a 3 metros Error Circular Probable (CEP). Posiciones deben ser reportadas como Latitud/Longitud WGS 84 en grados decimales. Valores de Longitud Oeste y Latitud Sur son reportados como negativos.
PARAMETROS DE DATOS PROPUESTOS PARA SER COLECTADOS POR UN SISTEMA DQM
DQM - Datos Específicos
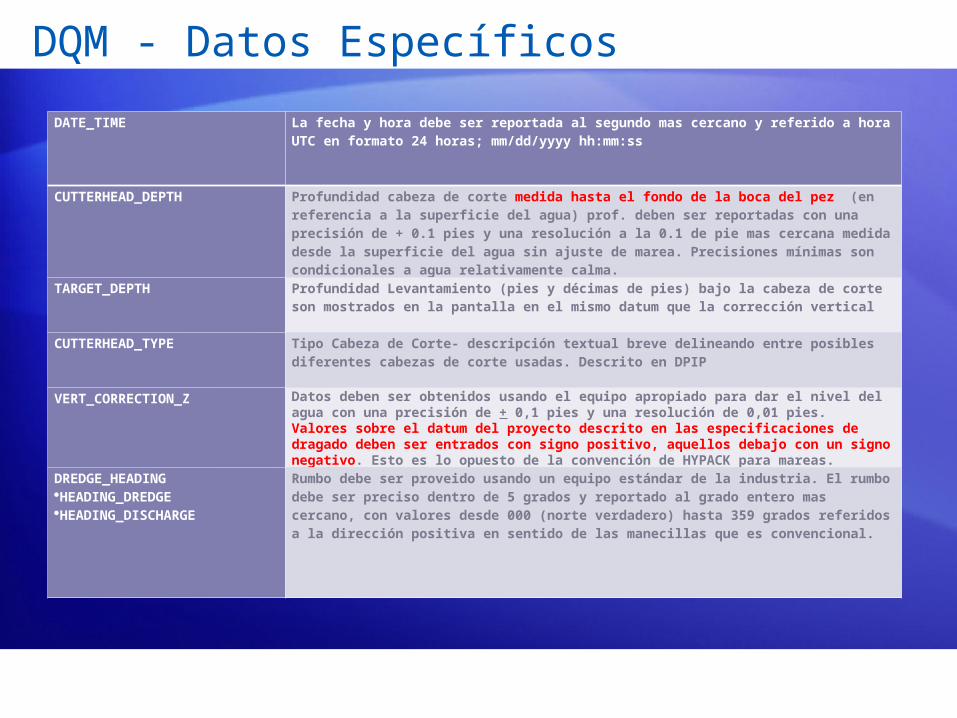
DATE_TIME La fecha y hora debe ser reportada al segundo mas cercano y referido a hora UTC en formato 24 horas; mm/dd/yyyy hh:mm:ss
CUTTERHEAD_DEPTH Profundidad cabeza de corte medida hasta el fondo de la boca del pez (en referencia a la superficie del agua) prof. deben ser reportadas con una precisión de + 0.1 pies y una resolución a la 0.1 de pie mas cercana medida desde la superficie del agua sin ajuste de marea. Precisiones mínimas son condicionales a agua relativamente calma.
TARGET_DEPTH Profundidad Levantamiento (pies y décimas de pies) bajo la cabeza de corte son mostrados en la pantalla en el mismo datum que la corrección vertical
CUTTERHEAD_TYPE Tipo Cabeza de Corte- descripción textual breve delineando entre posibles diferentes cabezas de corte usadas. Descrito en DPIP
VERT_CORRECTION_Z Datos deben ser obtenidos usando el equipo apropiado para dar el nivel del agua con una precisión de + 0,1 pies y una resolución de 0,01 pies. Valores sobre el datum del proyecto descrito en las especificaciones de dragado deben ser entrados con signo positivo, aquellos debajo con un signo negativo. Esto es lo opuesto de la convención de HYPACK para mareas.
DREDGE_HEADING HEADING_DREDGEHEADING_DISCHARGE
Rumbo debe ser proveido usando un equipo estándar de la industria. El rumbo debe ser preciso dentro de 5 grados y reportado al grado entero mas cercano, con valores desde 000 (norte verdadero) hasta 359 grados referidos a la dirección positiva en sentido de las manecillas que es convencional.
DQM - Datos Específicos
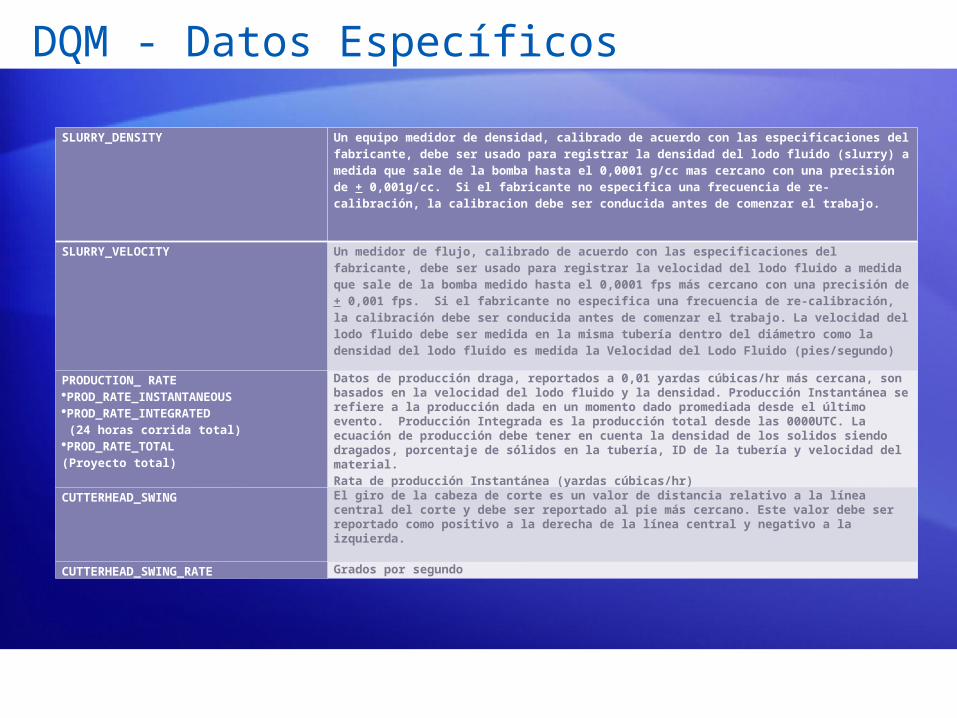
SLURRY_DENSITY Un equipo medidor de densidad, calibrado de acuerdo con las especificaciones del fabricante, debe ser usado para registrar la densidad del lodo fluido (slurry) a medida que sale de la bomba hasta el 0,0001 g/cc mas cercano con una precisión de + 0,001g/cc. Si el fabricante no especifica una frecuencia de re-calibración, la calibracion debe ser conducida antes de comenzar el trabajo.
SLURRY_VELOCITY Un medidor de flujo, calibrado de acuerdo con las especificaciones del fabricante, debe ser usado para registrar la velocidad del lodo fluido a medida que sale de la bomba medido hasta el 0,0001 fps más cercano con una precisión de + 0,001 fps. Si el fabricante no especifica una frecuencia de re-calibración, la calibración debe ser conducida antes de comenzar el trabajo. La velocidad del lodo fluido debe ser medida en la misma tubería dentro del diámetro como la densidad del lodo fluido es medida la Velocidad del Lodo Fluido (pies/segundo)
PRODUCTION_ RATE PROD_RATE_INSTANTANEOUSPROD_RATE_INTEGRATED (24 horas corrida total)PROD_RATE_TOTAL(Proyecto total)
Datos de producción draga, reportados a 0,01 yardas cúbicas/hr más cercana, son basados en la velocidad del lodo fluido y la densidad. Producción Instantánea se refiere a la producción dada en un momento dado promediada desde el último evento. Producción Integrada es la producción total desde las 0000UTC. La ecuación de producción debe tener en cuenta la densidad de los solidos siendo dragados, porcentaje de sólidos en la tubería, ID de la tubería y velocidad del material.Rata de producción Instantánea (yardas cúbicas/hr)
CUTTERHEAD_SWING
El giro de la cabeza de corte es un valor de distancia relativo a la línea central del corte y debe ser reportado al pie más cercano. Este valor debe ser reportado como positivo a la derecha de la línea central y negativo a la izquierda.
CUTTERHEAD_SWING_RATE Grados por segundo
DQM - Datos Específicos
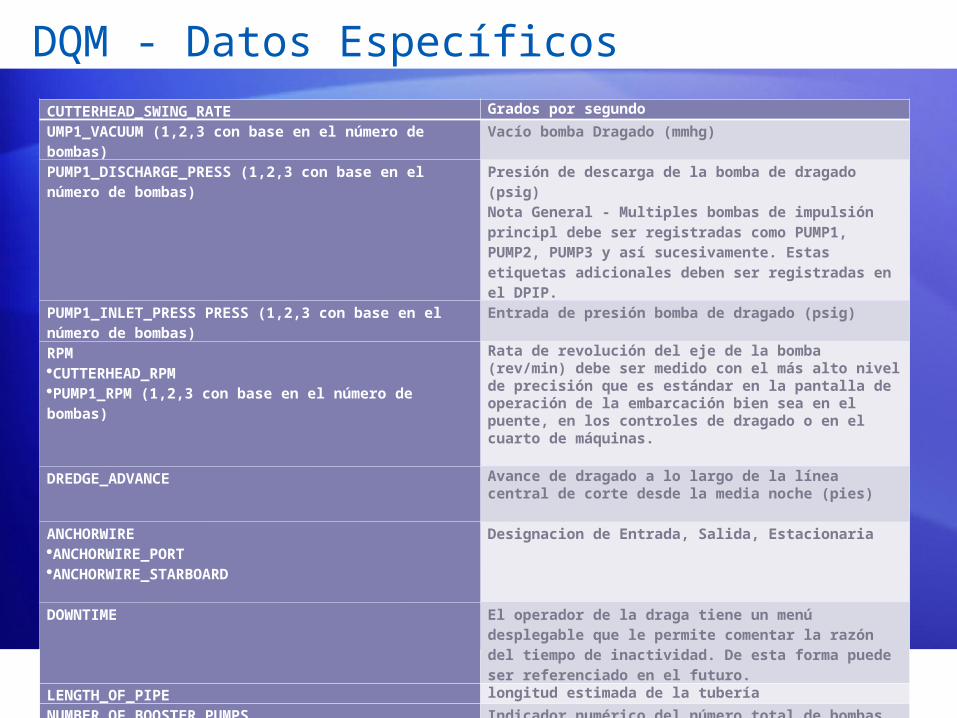
CUTTERHEAD_SWING_RATE Grados por segundo
UMP1_VACUUM (1,2,3 con base en el número de bombas) Vacío bomba Dragado (mmhg)
PUMP1_DISCHARGE_PRESS (1,2,3 con base en el número de bombas)
Presión de descarga de la bomba de dragado (psig) Nota General - Multiples bombas de impulsión principl debe ser registradas como PUMP1, PUMP2, PUMP3 y así sucesivamente. Estas etiquetas adicionales deben ser registradas en el DPIP.
PUMP1_INLET_PRESS PRESS (1,2,3 con base en el número de bombas)
Entrada de presión bomba de dragado (psig)
RPM CUTTERHEAD_RPMPUMP1_RPM (1,2,3 con base en el número de bombas)
Rata de revolución del eje de la bomba (rev/min) debe ser medido con el más alto nivel de precisión que es estándar en la pantalla de operación de la embarcación bien sea en el puente, en los controles de dragado o en el cuarto de máquinas.
DREDGE_ADVANCE Avance de dragado a lo largo de la línea central de corte desde la media noche (pies)
ANCHORWIREANCHORWIRE_PORTANCHORWIRE_STARBOARD
Designacion de Entrada, Salida, Estacionaria
DOWNTIME El operador de la draga tiene un menú desplegable que le permite comentar la razón del tiempo de inactividad. De esta forma puede ser referenciado en el futuro.
LENGTH_OF_PIPE longitud estimada de la tubería
NUMBER OF BOOSTER PUMPS Indicador numérico del número total de bombas de impulso en la línea con la Cabeza de Corte de la draga
DQM - Datos Específicos