Embed Size (px)
Citation preview
ECEN5017 Lecture 5CU‐Boulder Announcements
• HW1 due 9am MDT, Monday, Sep. 9– Submit a single, easily readable pdf file via D2L– Late work will receive no credit– Collaboration is encouraged; use blog
• Short tutorial on MATLAB/Simulink posted on the CAETE site with other recorded lectures
• HW2 will include Simulink model simulations
1
Please disregard USU‐specific announcements in lectures recorded by Prof. Zane at USU

Today• Consider impact of vehicle component efficiency• Develop component & system simulation models
2

EV drivetrain components
3
ElectricMotor Transmission
wheels(radius rw)
ne
Te
nvTv
Fv v
3-phaseInverter
DC-DCConverter
BatteryPack
BatteryCharger
Electric Drive
Pbatt PDC
IaIb
Ic
Tv: Torque at the wheelnv: wheel rotational speed [rpm]rw = rv: Wheel radius

Parameter Review
4
v: vehicle velocity (speed)Fv: Vehicle tractive forceTv: Torque at the wheelnv: wheel rotational speed [rpm]ωv: wheel angular speed [rad/sec]Pv: Vehicle tractive power
Mv: vehicle massrw = rv: Wheel radiusCr: Rolling resistance coefficientCd: Aerodynamic drag coefficientAv: Vehicle front areaair density
Vehicle / wheel level parameters
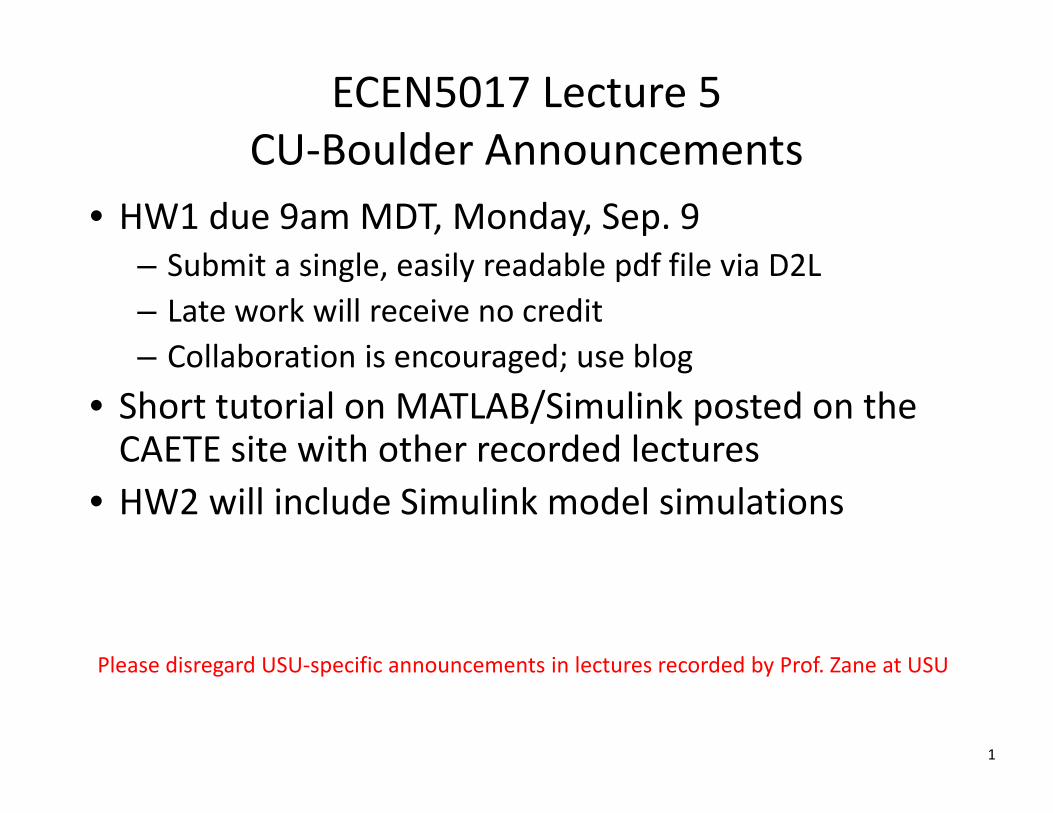
gratio: gear ratione: motor rotational speed [rpm]ωe: motor angular speed [rad/sec]Te: motor/engine torque [Nm]Ke: Torque constantPe_max: Maximum motor powerTe_max: Maximum motor torquevb: Base speed, torque/power limit boundaryx: motor speed factor, ratio vmax / vbta: time spec to accelerate to speed vfm: motor efficiency
Motor / engine parameters

Component Efficiency
5
ElectricMotor Transmission
wheels(radius rw)
ne
Te
nvTv
Fv v
3-phaseInverter
DC-DCConverter
BatteryPack
BatteryCharger
Electric Drive
Pbatt PDC
IaIb
Ic
Electric Motor Efficiency
6

Electric Motor Efficiency
7
Evaluation of 2004 Toyota Prius Hybrid Electric Drive System(2005 report by Oak Ridge National Lab)

8
Drive Cycle Force and Speed Requirements

DC‐DC Converter Efficiency
9
Evaluation of 2004 Toyota Prius Hybrid Electric Drive System(2005 report by Oak Ridge National Lab)

EV Simulation Models
10

Driver Dynamics
11
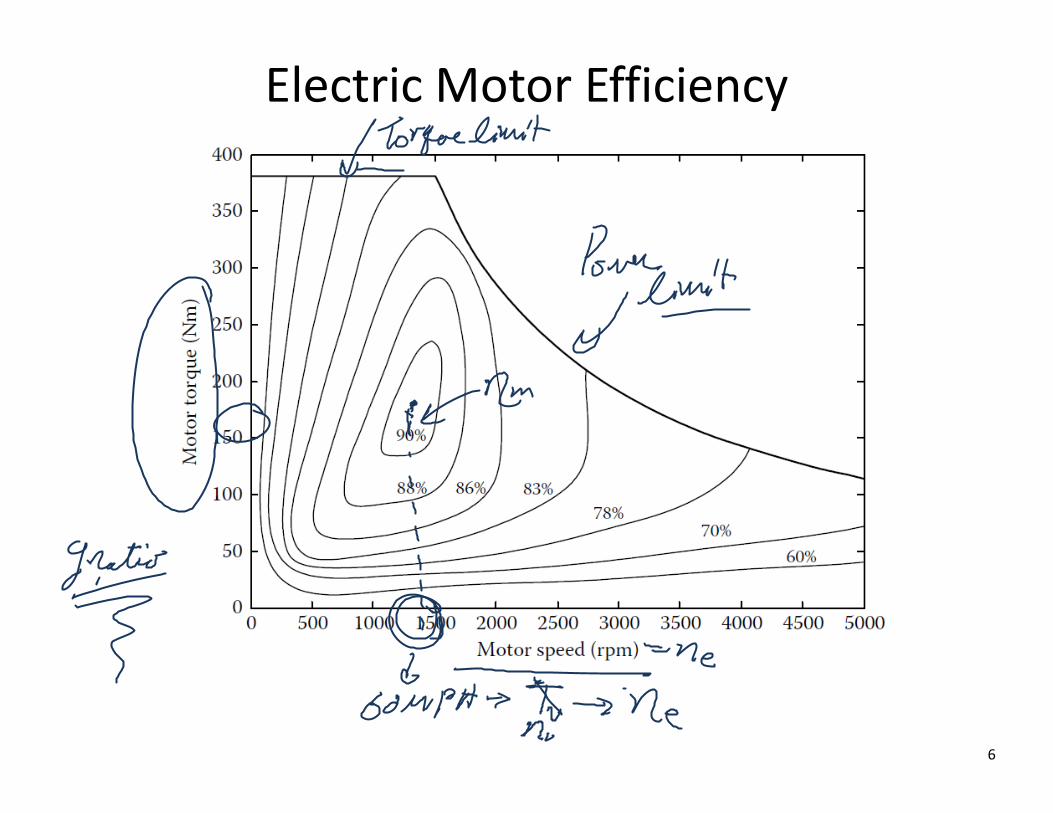
Simulink Plant Implementation
12

Resistive Force Model
13

Drive Train Model
14
ElectricMotor Transmission
wheels(radius rw)
ne
Te
nvTv
Fv v
3-phaseInverter
DC-DCConverter
BatteryPack
BatteryCharger
Electric Drive
Pbatt PDC
IaIb
Ic

Battery Model
15

DC‐DC Converter Model
16

DC‐DC Functional Model
17

Motor Drive Inverter
18

Inverter Functional Model
19

Motor Model
20

Engine Torque/Power Limits
21

Gear Ratio and Tire
22

23
Initialization File

Drive Train Model
24
ElectricMotor Transmission
wheels(radius rw)
ne
Te
nvTv
Fv v
3-phaseInverter
DC-DCConverter
BatteryPack
BatteryCharger
Electric Drive
Pbatt PDC
IaIb
Ic