Embed Size (px)
Citation preview

Examination of Multi-objective Optimization Method for Global
Search Using DIRECT and GA
Luyi WANG, Hiroyuki ISHIDA, Tomoyuki HIROYASU, Mitsunori MIKI
Abstract— A number of multi-objective genetic algorithms(MOGAs) have been developed to obtain Pareto optimal solu-tions for multi-objective optimization problems. However, asthese methods involve probabilistic algorithms, there is noguarantee that the global search will be conducted in thedesign variable space. In such cases, there are unsearchedareas in the design variable space, and the obtained Paretosolutions may not be truly optimal. In this paper, we proposean optimization method called NSDIRECT-GA to conduct aglobal search over as much as possible of the design variablespace, which improves the reliability of the obtained Paretosolutions. The effectiveness of NSDIRECT-GA was examinedthrough numerical experiments. By NSDIRECT-GA, not onlythe optimal solutions but also the information of the landscapecan be determined, and it is possible to obtain Pareto solutionswith higher reliability than with normal MOGAs.
I. INTRODUCTION
Multi-objective optimization problems are those in which
multiple objectives must be optimized. As these multiple
objectives often conflict with each other, a single optimum
solution is often not available. Therefore, the goal in such
cases is to obtain Pareto optimal solutions, which are so-
lutions with objective values that cannot be simultaneously
improved without degradation of at least one other value.
There have been many recent studies of the adaptation of
Genetic Algorithms (GAs) to multi-objective optimization
[1], [2], [3], [4], [5], [6]. This is because a GA search
is performed by multiple individuals, and it is capable of
obtaining Pareto solutions in a single search. Adaptation of
GAs to multi-objective optimization is called Multi-objective
Genetic Algorithm (MOGA). Of the many MOGAs that have
been developed to date, NSGA-II [5] and SPEA2 [6] are
known to perform well.
However, GAs and MOGAs are probabilistic algorithms,
and there is no guarantee that a global search of the design
variable search will be conducted. A MOGA search is
strongly influenced by non-dominated solutions, and tends
to concentrate in the area in which the non-dominated
solutions exist, resulting in an uneven search. Furthermore,
when an individual with high fitness value that overwhelms
other individuals is created in a MOGA search, its genetic
information will quickly spread throughout the population
and result in early convergence. There will be unsearched
areas in a MOGA search due to the high influence of the
non-dominated solutions, and the obtained Pareto solutions
lack reliability with regard to being truly optimal. Therefore,
Luyi Wang is with the Department of Knowledge Engineering andComputer Science, Doshisha University, JAP (phone: 81-774-65-6924; fax:81-774-65-6780; email: [email protected]).
it is necessary to consider a mechanism to perform a global
search of the design variable space as much as possible, and
to improve the reliability of the obtained Pareto solutions.
In this paper, we propose an optimization method called
NSDIRECT-GA, which is a combination of a global search
algorithm of DIRECT [7] and MOGA. NSDIRECT-GA
executes a global search of the design variable space as much
as possible, and reduces unsearched areas. It also makes it
possible to roughly understand the landscape of the search
space when the optimization is finished.
II. GLOBAL SEARCH METHOD
To improve the reliability of the solutions derived by
a MOGA, it is necessary to search throughout the design
variable space without leaving any areas unsearched. Global
search becomes important for this purpose, and a single ob-
jective optimization method called DIRECT [7] has attracted
a great deal of attention in this field. However, it has been
confirmed that the convergence of DIRECT is slow when
applied to multimodal functions [8].
In this paper, we propose an optimization method
called NSDIRECT-GA (Non-dominated Sorting DIRECT-
GA), which adapts DIRECT to multi-objective optimization
and combines it with MOGA. The following sections will ex-
plain DIRECT and the modifications made to adapt DIRECT
to multi-objective optimization.
A. DIRECT
DIRECT (DIviding RECTangle) is a method that searches
for the optimal solution by considering design variable space
to be an N-dimension hyper-cube (referred to as
boxes
in
this paper), dividing the hyper-cube, and sampling the center
points. The DIRECT algorithm is given follows:
1) Normalization
2) Division of the Hyper-cube
3) Potentially Optimal Hyper-rectangles
4) Division of the Hyper-rectangles
5) Repeat 3, 4 until the termination rule is satisfied
Each operation is described in the following sections.
1) Normalization and Division of the Hyper-cube: DI-
RECT begins the search by transforming the domain of the
target problem into the unit hyper-cube:
Ω = x ∈ RN : 0 ≤ xi ≤ 1 (1)
Then, the center point of the hyper-cube c1 is sampled.
Next, DIRECT divides this space by evaluating the function
values at the points c1 ± δ−→ei (i = 1, ..., N), where δ is one-
third the side length of the hyper-cube, and −→ei is the ith

Euclidean base-vector. That is, a hyper-cube is divided into
three hyper-rectangles in each dimension.
The sequence of the dimensions to be divided is deter-
mined by wi, which is shown in (2), and the first division is
performed in the dimension with the smallest wi.
wi = min(f(c1 + δei), f(c1 − δei)) (2)
i = 1, ..., N
This operation is repeated for all dimensions on the box
with the point c1, choosing the next dimension with the next
smallest wi. Fig. 1 illustrates the search space after the initial
divisions. The numbers in the figure on the left of Fig. 1
show the function values at each point. In this case, w1 =
60.0 and w2 = 150.1, so the first division is performed along
the direction of x1.
Fig. 1. Design variable space after the first division
2) Potentially Optimal Hyper-rectangles: DIRECT di-
vides all of the hyper-rectangles that satisfy the definition
of potentially optimality:
Let ε > 0 be a positive constant and let fmin be the
current best function value. A hyper-rectangle j is potentially
optimal if there exists some K > 0 such that
f(cj) − Kdj ≤ f(ci) − Kdi, ∀i, and (3)
f(cj) − Kdj ≤ fmin − ε|fmin|
In (3), cj is the center point of the hyper-rectangle j, and
dj defines a measure for this hyper-rectangle. Jones et al.
used the distance from center point cj to its vertices for this
measure. Jones also concluded that a good value for ε is
1.0× 10−4. Fig. 2 illustrates this definition.
Fig. 2. Selection of hyper-rectangles to be divided
3) Division of the Hyper-rectangles: DIRECT divides
the hyper-rectangles by performing division only in the
dimensions with the longest side length. The sequence of
the dimensions to be divided is determined by wj by small
sequence:
wj = min(f(ci + δiej), f(ci − δiej)) (4)
j ∈ I
Where I is the set of dimensions with the longest side
length, and δi is one-third the length of the longest side
of hyper-rectangle i. DIRECT performs the division for all
dimensions in I .
The DIRECT search is performed by repeating the above
operations. Several iterations of DIRECT search are shown
in Fig. 3.
Fig. 3. Several iterations of DIRECT search
B. NSDIRECT-GA
As DIRECT mentioned in the previous section is a single
objective optimization method, some modifications are nec-
essary to apply it to multi-objective optimization problems.
To improve the slow convergence of DIRECT in multi-
modal functions, MOGA is also utilized. In this paper, we
propose NSDIRECT-GA (Non-dominated Sorting DIRECT-
GA) which combines the modified DIRECT and MOGA.
Several modifications have been made in NSDIRECT-GA
from the original DIRECT, including a change in the divi-
sion of the hyper-cube and hyper-rectangles, determination
of potentially optimal hyper-rectangles, and utilization of
MOGA. NSDIRECT-GA also utilizes Non-dominated Sort
and Crowding Distance used in NSGA-II [5]. The modifica-
tions are described in the following sections.
1) Changes in Division of the Hyper-cube: In DIRECT,
a cube is divided according to the values of f(c1± δ−→ei )(i =1, ..., N) in each dimension at points c1 ± δ−→ei (i = 1, ..., N).In NSDIRECT-GA, the division is executed on the following
basis:
1) Rank at the center point of the each box (Rank)
2) Crowding Distance at the center point of the each box
(CD)
NSDIRECT-GA divides this space according to Rank and
CD at points c1±δ−→ei (i = 1, ..., N), where δ is one-third the
side length of the hyper-cube, and −→ei is the ith Euclidean

base-vector. That is, a hyper-cube is divided into three hyper-
rectangles in each dimension.
The order in which the dimensions are divided is de-
termined by Ri, as shown in (5), and the first division is
performed in the dimension with the smallest Ri. However,
when there are multiple dimensions with equal R, the se-
quence is determined by Ci, as shown in (6). In this case,
the dimension with the longest Ci is divided first.
Ri = min(Rank(c1 + δei), Rank(c1 − δei)) (5)
i = 1, ..., N
Ci = max(CD(c1 + δei), CD(c1 − δei)) (6)
i = 1, ..., N
2) Change in Determination of Potentially Optimal Hyper-
rectangles: In NSDIRECT-GA we divide all of the hyper-
rectangles that are potentially optimal as in DIRECT. The
definition of potentially optimal in NSDIRECT-GA is as
follows:
Let ε > 0 be a positive constant. A hyper-rectangle j is
potentially optimal if there exists some K > 0 such that:
Rank(cj) − Kdj ≤ Rank(ci) − Kdi, and
Rank(cj) − Kdj ≤ 1 − ε, and
if(dj = diandRank(cj) = Rank(ci))
then(CD(cj) ≥ CD(ci)), ∀i (7)
In (7), cj is the center point of the hyper-rectangle j, and
dj is the distance between the center point cj and its vertices.
In this paper, we used 1.0 × 10−4 for ε . Fig. 4 illustrates
this definition.
Fig. 4. Selection of hyper-rectangles to be divided
In Fig. 4, the horizontal and vertical axis represent d in
(7), and Rank(c), respectively. From Fig. 4, it can be seen
that the potentially optimal boxes are located at the bottom
of each column, forming a convex front with all other boxes
located above it.
Moreover, the hyper-rectangles with Rank = 1 were not
always potentially optimal. Therefore, the value of ε controls
the balance of local and global search.
3) Changes in Division of the Hyper-rectangles: DIRECT
divides the hyper-rectangles only in the dimensions with the
longest side length in the hyper-rectangles. The sequence
of dimensions to be divided is determined by Rj shown in
(8), in ascending order. However, when there exist multiple
dimensions with equal R, the sequence is determined by Cj
as shown in (9), in descending order.
Rj = min(Rank(ci + δiej), Rank(ci − δiej)) (8)
j ∈ I
Cj = max(CD(ci + δiej), CD(ci − δiej)) (9)
j ∈ I
In (8) and (9) I is the set of dimensions with the longest
side length, and δi is one-third the length of the longest side
of hyper-rectangle i. NSDIRECT-GA performs the division
for all dimensions in I .
4) Utilization of MOGA: In NSDIRECT-GA, MOGA
is utilized after having divided the design variable space
with DIRECT into the number of hyper-rectangles decided
beforehand. Then, hyper-cubes are created with DIRECT
according to the solutions obtained by MOGA search.
As shown in Fig. 5, the design variable space of MOGA
search is divided into hyper-cubes with side length being d,
where d is the side length of the smallest hyper-rectangle
obtained by the DIRECT search. Only the center points of
these divided hyper-cubes are used as the candidate solutions
of the MOGA.
Fig. 5. Division of the design variable space for MOGA search
Non-dominated solutions are obtained from the MOGA
search. These solutions are center points of the hyper-cubes
with the side length of d. The hyper-cubes containing the
non-dominated solutions are added to the candidate hyper-
rectangles to be divided by DIRECT as shown in Fig. 6.
d
Fig. 6. Addition of optimal solution to DIRECT search
However, these hyper-cubes containing the non-dominated
solutions cannot be simply added to the candidates, as this
would result in the creation of shapes other than hyper-
rectangles in the design variable space. To prevent this, it
is necessary to make adjustments by dividing the design
variable space so that it consists only of hyper-rectangles.

The following method of the adjusting division is conducted
for all of the added solutions.
Step 1 Specify the hyper-rectangle in which the added
solution exists.
Step 2 End if the hyper-rectangle is a hyper-cube with side
length d. If not, go to Step 3.
Step 3 Divide the hyper-rectangle using the method shown
in Section II-B.3 Then, return to Step 1.
The process of adjusting division is shown in Fig. 7
Fig. 7. Adjusting division of the design variable space
III. NUMERICAL EXPERIMENT
A. Experimental Overview
The search history of the design variable space by the
proposed NSDIRECT-GA was compared with that of NSGA-
II [5].
DIRECT is known to be effective for unimodal problems
[8], and so it was expected that the proposed method utilizing
DIRECT would also be effective for unimodal problems.
Although the convergence of DIRECT is slow when applied
to multimodal problems, the proposed method was expected
to resolve this issue by combining MOGA with DIRECT.
To verify the effectiveness of the proposed method, it was
applied to both unimodal and multimodal test problems in
the experiment.
To confirm what type of search was performed by each
method in the design variable space, the search historys were
compared with the actual landscape of the test problem. The
MOGA utilized in NSDIRECT-GA was NSGA-II [5].
B. Test Problem
The test problems used in the experiment were ZDT2 and
ZDT4. The landscapes of the test problems were expressed
by the function g(x), which represents the distance from the
Pareto optimal front. Areas in the design variable space with
small values of g(x) are closer to the Pareto optimal front.
Fig. 8 shows the relations of function g(x) and the Pareto
optimal front. As shown in Fig. 8, the Pareto optimal front
has a g(x) value of 0; therefore, areas in the design variable
space with g(x) of 0 are where the Pareto optimal solutions
are found.
The test problems used are described in the following
sections.
f1
f2
Pareto Optimal Front
g(x)=0
g(x)=0.3
g(x)=0.8 g(x)=1.5
Fig. 8. Relation of function g(x) and Pareto optimal front
1) ZDT2: ZDT2 is a 2-objective minimization problem
where both single modal at f1(x) and f2(x) are unmoral.
The Pareto optimal front is non-convex and the equation of
ZDT2 is shown in (10). Its landscape is also shown in Fig.
9
min f1(x) = x1
min f2(x) = g(x2, · · · , xn) · h(f1, g)
g(x2, · · · , xn) = 1 + 9(
n
i=2xi)/(n − 1)
h(f1, g) = 1 − (f1/g)2
subject to xi ∈ [0, 1], i = 1, . . . , n, n = 2
(10)
0
1
2
3
4
5
6
7
8
9
0
0.2
0.4
0.6
0.8
1 0
0.2
0.4
0.6
0.8
1
0
1
2
3
4
5
6
7
8
9
Fig. 9. Landscape of ZDT2
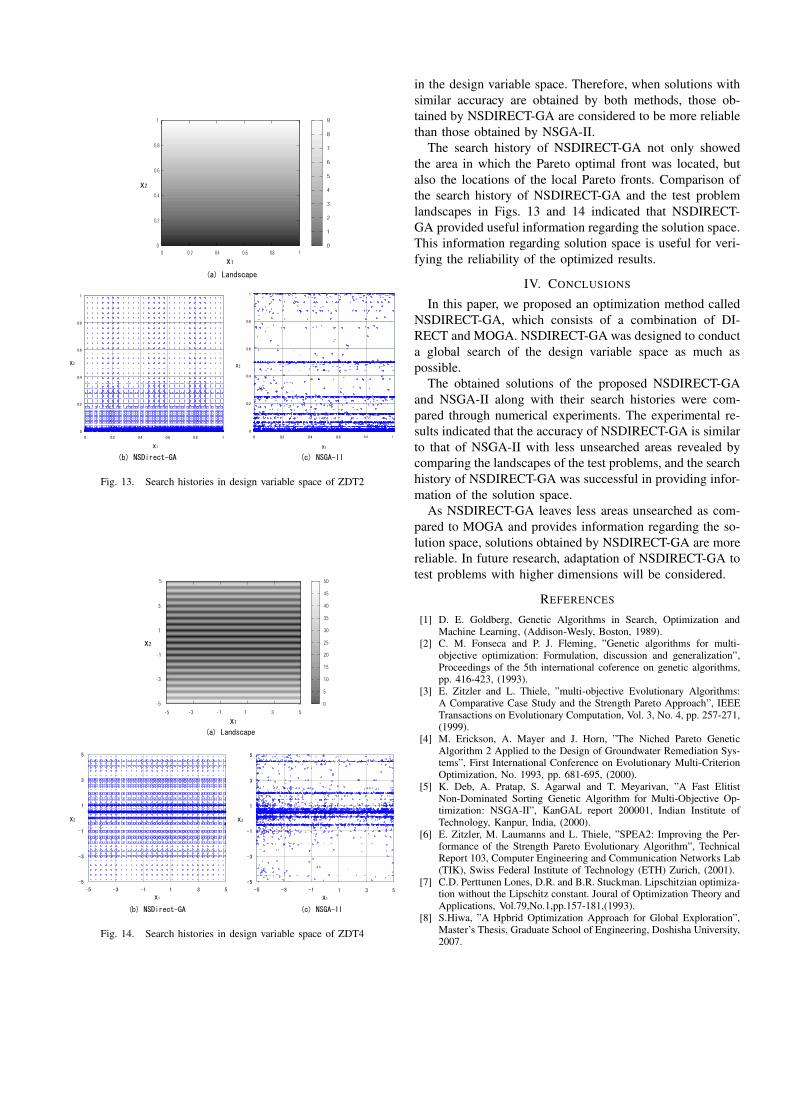
2) ZDT4: ZDT4 is a 2-objective minimization problem
with unmodal f1(x) and multi-modal f2(x). The Pareto
optimal front is convex and the equation of ZDT4 is shown
in (11). In the experiment, the design variable space is shifted
using the variable d because the Pareto optimal front of
ZDT4 exists in the center of the design variable space and
is obtained by the DIRECT algorithm in its initialization
process. The value of d in this experiment was 0.5. The
landscape of ZDT4 is shown in Fig. 10
min f1(x) = x1
min f2(x) = g(x2, · · · , xn) · h(f1, g)
g(x2, · · · , xn) = 1 + 10(n − 1)
+(
n
i=2((xi − d)2 − 10cos(4π(xi − d)))
h(f1, g) = 1 − f1/g
subject to x1 ∈ [0, 1]
xi ∈ [−5, 5], i = 2, . . . , n, n = 2
(11)

0
5
10
15
20
25
30
35
40
45
50
-5
-3
-1
1
3
5-5
-3
-1
1
5 0 5
10 15 20 25 30 35 40 45 50
3
Fig. 10. Landscape of ZDT4
C. Evaluation Method
Many methods are available to evaluate the obtained Pareto
solutions; the Generational Distance (GD) was used here. GD
measures the distance between the obtained Pareto solutions
and the Pareto optimal front. Pareto solutions with small
GD value are closer to the Pareto optimal front. GD was
calculated by (12).
GD =
(
1
nPF
nP F∑
i=1
d2
i
)1
2
(12)
Here, nPF is the number of individuals in the obtained
Pareto solutions and di is the Euclidean distance between the
individual i of the obtained Pareto solutions and the Pareto
optimal front in the objective space.
D. Parameters
The parameters of NSDIRECT-GA and of NSGA-II used
in the experiment are shown in Tables I and II, respectively.
TABLE I
NSDIRECT-GA PARAMETER SETTINGS.
Number of boxes when MOGA is applied 5000
Maximum Generation 50
Population size 100
Crossover Method 2 point crossover
Crossover Rate 1.0
Gene length 10*Dimension
Mutation Rate 1.0/Gene length
Crowding tournament size 2
TABLE II
NSGA-II PARAMETER SETTINGS.
Maximum Generation 100
Population size 100
Crossover Method 2 point crossover
Crossover Rate 1.0
Gene length 10*Dimension
Mutation Rate 1.0/Gene length
Crowding tournament size 2
E. Results
The search results of ZDT2 and ZDT4 in 30 trials are
shown in Figs. 11 and 12, respectively. GD values shown
here are the medians of 30 trials.
Fig. 11. Search Results and GD of ZDT2 in 30 trials
Fig. 12. Search Results and GD of ZDT4 in 30 trials
From Figs. 11 and 12, it can be seen that in both ZDT2 and
ZDT4 test problem, NSGA-II and NSDIRECT-GA obtained
similar solutions. The GD values showed that in both test
problems the solutions obtained by NSGA-II reached the
Pareto optimal front. On the other hand, although the so-
lutions obtained by NSDIRECT-GA were not truly optimal,
as shown by the GD value, they were sufficiently close to
the Pareto optimal front. In NSDIRECT-GA, the obtained
solutions only exist at the center of the hyper-rectangles.
Therefore, solutions located on the sides of the hyper-
rectangles cannot be obtained. With both test problems, the
Pareto optimal solutions were located on the sides of the
hyper-rectangles, and this is why NSDIRECT-GA was unable
to obtain the Pareto optimal front. These results indicate that
the accuracy of NSDIRECT-GA is similar to that of NSGA-
II.
From Figs. 11 and 12 indicate that in both ZDT2 and
ZDT4 test problems, NSDIRECT-GA obtained similar solu-
tions to the Pareto optimal front. Therefore, NSDIRECT-GA
was effective for both unimodal and multimodal problems.
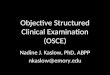
The search histories of the design variable spaces of ZDT2
and ZDT4 by each method are shown in Figs. 13 and 14,
respectively.
Figs. 13 and 14 show that in both ZDT2 and ZDT4
test problems, NSDIRECT-GA conducted global search in
the design variable space with few unsearched areas, and
searched close to the area with the Pareto optimal front. On
the other hand, although NSGA-II was successful in finding
the Pareto optimal front, many unsearched areas remained
0
1
2
3
4
5
6
7
8
9
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Fig. 13. Search histories in design variable space of ZDT2
0
5
10
15
20
25
30
35
40
45
50
-5 -3 -1 1 3 5
-5
-3
-1
1
3
5
Fig. 14. Search histories in design variable space of ZDT4
in the design variable space. Therefore, when solutions with
similar accuracy are obtained by both methods, those ob-
tained by NSDIRECT-GA are considered to be more reliable
than those obtained by NSGA-II.
The search history of NSDIRECT-GA not only showed
the area in which the Pareto optimal front was located, but
also the locations of the local Pareto fronts. Comparison of
the search history of NSDIRECT-GA and the test problem
landscapes in Figs. 13 and 14 indicated that NSDIRECT-
GA provided useful information regarding the solution space.
This information regarding solution space is useful for veri-
fying the reliability of the optimized results.
IV. CONCLUSIONS
In this paper, we proposed an optimization method called
NSDIRECT-GA, which consists of a combination of DI-
RECT and MOGA. NSDIRECT-GA was designed to conduct
a global search of the design variable space as much as
possible.
The obtained solutions of the proposed NSDIRECT-GA
and NSGA-II along with their search histories were com-
pared through numerical experiments. The experimental re-
sults indicated that the accuracy of NSDIRECT-GA is similar
to that of NSGA-II with less unsearched areas revealed by
comparing the landscapes of the test problems, and the search
history of NSDIRECT-GA was successful in providing infor-
mation of the solution space.
As NSDIRECT-GA leaves less areas unsearched as com-
pared to MOGA and provides information regarding the so-
lution space, solutions obtained by NSDIRECT-GA are more
reliable. In future research, adaptation of NSDIRECT-GA to
test problems with higher dimensions will be considered.
REFERENCES
[1] D. E. Goldberg, Genetic Algorithms in Search, Optimization andMachine Learning, (Addison-Wesly, Boston, 1989).
[2] C. M. Fonseca and P. J. Fleming, ”Genetic algorithms for multi-objective optimization: Formulation, discussion and generalization”,Proceedings of the 5th international coference on genetic algorithms,pp. 416-423, (1993).
[3] E. Zitzler and L. Thiele, ”multi-objective Evolutionary Algorithms:A Comparative Case Study and the Strength Pareto Approach”, IEEETransactions on Evolutionary Computation, Vol. 3, No. 4, pp. 257-271,(1999).
[4] M. Erickson, A. Mayer and J. Horn, ”The Niched Pareto GeneticAlgorithm 2 Applied to the Design of Groundwater Remediation Sys-tems”, First International Conference on Evolutionary Multi-CriterionOptimization, No. 1993, pp. 681-695, (2000).
[5] K. Deb, A. Pratap, S. Agarwal and T. Meyarivan, ”A Fast ElitistNon-Dominated Sorting Genetic Algorithm for Multi-Objective Op-timization: NSGA-II”, KanGAL report 200001, Indian Institute ofTechnology, Kanpur, India, (2000).
[6] E. Zitzler, M. Laumanns and L. Thiele, ”SPEA2: Improving the Per-formance of the Strength Pareto Evolutionary Algorithm”, TechnicalReport 103, Computer Engineering and Communication Networks Lab(TIK), Swiss Federal Institute of Technology (ETH) Zurich, (2001).
[7] C.D. Perttunen Lones, D.R. and B.R. Stuckman. Lipschitzian optimiza-tion without the Lipschitz constant. Joural of Optimization Theory andApplications, Vol.79,No.1,pp.157-181,(1993).
[8] S.Hiwa, ”A Hpbrid Optimization Approach for Global Exploration”,Master’s Thesis, Graduate School of Engineering, Doshisha University,2007.