Embed Size (px)
Citation preview

-62-
参考資料
ネットワーク型 RTK-GPS 測量の概要
ネットワーク型 RTK-GPS 測量を利用する公共測量作業マニュアル(案)には、精度
検証を行った VRS 方式及び FKP 方式の2方式を採用している。 1.VRS 方式 VRS 方式とは、GPS 測量機の機能によって、VRS 方式とサーバ型 VRS 方式に区
分される。言い換えれば、RTK-GPS 測量における基線解析を GPS 測量機側か配信
事業者側(解析処理サービス事業者のサーバを含む)のどちらで行っているかの違い
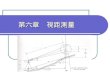
である。 GPS 測量機で解析計算を行う VRS 方式(図-1.1)は、移動局からその概略位
置情報を通信装置により配信事業者に送信し、配信事業者で移動局周辺3点以上の基
準局(電子基準点)での観測値を利用して、概略位置に仮想点を作り、この位置にお
ける補正値や観測されるであろう位相データ等(以下「補正データ」という。)を計
算する。移動局側は、通信装置により配信事業者からこの補正データ等を受け仮想点
との RTK-GPS 測量を行って、移動局の情報と補正データ等を解析処理し位置を求め
る方式である。
図-1.1 VRS 方式の概念と観測及び計算の流れ
配信事業者 基準局 移
動局
国土地理院
配信機関
提供
配信
電離層
対流圏
仮想点 概略位置
GPS 衛星 誤差要因
GPS 衛星・時刻同期
・軌道誤差
遅延誤差・電離層遅延
・対流圏遅延
測位情報 誤差量
線形補間平面
配信事業者 携帯電話で送受信 移動局(観測者)単独測位
補正データ等+観測データ基線解析→位置の決定VRS方式測量の開始
仮想点作成補正データ等の算出
概略位置データ
補正データ等

-63-
一方、サーバ型 VRS 方式の GPS 測量機を用いる方式(図-1.2)は、VRS 配
信事業者で得られた補正データと、移動局から送られてくる観測データにより、解析
処理事業者内のサーバで RTK-GPS 測量計算を行って、移動局の位置を求め、移動局
に結果を返信する方式である。
VRS 方式における補正データ等とは、RTK-GPS 測量において、RTK 解析処理を
行うための仮想点観測データをいい、これらは下記のとおりである。 1)配信事業者に設定された概略位置(仮想点)の座標値 2)仮想点で観測されるであろう観測データ(搬送波位相データ及び擬似距離デー
タ等)
基準局
移動局
国土地理院
配信機関
提供
配信
配信事業者 仮想点
図-1.2 事業者側で基線解析を行うサーバ型 VRS 方式の概念と観測及び計算の流れ
測位情報
解析処理 事業者
転送
配信事業者 解析処理事業者 携帯電話で送受信 移動局(観測者)
概略位置データ転送 概略位置データ 単独測位観測データ 観測データ
補正データ等VRS方式測量の開始
仮想点作成補正データ算
出 補正データ等+観測データ基線解析→位置の決定
移動局の位置 解析結果

-64-
2.FKP 方式(図-2) FKP 方式とは、 寄りの基準局と移動局とで干渉測位を行いこれに面補正パラメー
タを加え移動局の位置を決定する方式をいう。 配信事業者は、常に、多数基準局(電子基準点)の観測量から、電離層等の状態空
間モデルを生成し、このモデルから各種誤差量(電離層・対流圏の遅延、衛星の軌道
誤差等)を推定し、各基準局に対応した周辺の誤差量として算出している。この誤差
量から線形 FKP 平面(線形面補正パラメータ平面)を計算する。 移動局では、通信装置により配信事業者から近傍の基準局に対応したこの各線形
FKP 平面を取得し、近傍の基準局の線形 FKP 平面を選択する。選択した線形 FKP平面の傾きと移動局の単独測位結果とで線形補間処理を行い、移動局における補正量
を計算し、移動局の位置を決める。 なお、位置決定は移動局側で行っている。
※ FKP 方式の、線形 FKP 平面(線形面補正パラメータ平面)とは、位置を決める
際に使用する、各基準局の誤差量のことをいう。なお、各基準局の誤差量を一般的
に称する場合を面補正パラメータと呼んでいる。
配信事業者 基準局B
移動局A
国土地理院
配信機関
提供
配信
電離層
対流圏
誤差要因
GPS 衛星・時刻同期
・軌道誤差
遅延誤差・電離層遅延
・対流圏遅延
測位情報
誤差量
図-2 FKP 方式の概念と観測及び計算の流れ
基準局A
平面の傾き
誤差量
線形 FKP 平面B
線形FKP平面N 基準局N
線形FKP平面A
配信事業者 携帯電話で受信 移動局(観測者)電子基準点リアルタイムデータ 単独測位による概略位置
補正情報 +(状態空間モデル) 各基準局の
線形FKP平面量最寄り基準局の線形FKP平面量
各点の誤差量算出 誤差量 位置決定
FKP方式測量の開始
GPS 衛星

日本GPSデータサービス株式会社
VRS測量方式
■間接法(2台同時観測)▲既知点 ●新点▲ ▲VRS点
間接基線ベクトル 観測ベクトル
●各間接基線ベクトルが正確に求められ、成果が確実に得られる●往復・2回観測は不要で片道観測で済む(環閉合差で点検の場合)
環閉合点検観測(既知点-既知点間同時観測)■間接法(1台準同時観測)
短時間に移動する
短時間に移動する
短時間に移動する
●1台の受信機、作業者1名で作業が行える●同時観測に次ぎ2点間の間接ベクトルは独立して正確に求められる
往路は逆順で観測を行い、間接ベクトルのセット間較差により点検計算
■直接法
●1台の受信機、作業者1名で作業が行える●VRS点の設定は座標指定(固定)が有効である
隣接する2点と往復のVRS点2点を使用した間接ベクトル4辺で環を構成し、環閉合差により点検計算
往観側
復観測

ネットワーク型 RTK-GPS を利用した公共測量作業マニュアル(案)地形測量・応用測量
国土地理院は 2005 年 6 月、「基準点測量」に続く「地形測量」及び「応用測量」に関するネットワーク型 RTK-GPS を利用
した公共測量作業マニュアル(案)(以下、マニュアル(案))を公表しました。
■単点観測法の採用
測量の大きな目的は位置(座標)を決めることです。従来は、座標既知点を出発点として、角度、基線ベクトルまたは
距離などの相対位置測量を行って位置を決めてきました。単点観測は座標値が観測値となります。直接的に測量の最
終目的が決定できるようになったわけで、今回のマニュアル(案)は画期的な出来事といえると思います。
2005 年 3 月、改正不動産登記法が施行されました。不動産登記規則第 77 条第 1 項第 7 号は、地積測量図を世界測
地系座標で記述するように定めました。現実には、近傍に三角点や地籍図根点などが存在しない場合が多く、地積測
量図を世界測地系座標化することは大変なことです。もし、単点観測により、引照点の座標を決めれば、即座に地積測
量図の世界測地系座標化が実現します。TSにより正確に決められた任意座標の地積測量図と単点観測による世界
測地系座標とを組み合わせ、地積測量図の世界測地系座標化を実現するソリューションツールは、弊社が開発した
「平成検地/BMB」です。
測量で扱う観測値は、角度、距離、比高、基線ベクトルなどに限られてきました。単点観測により得られた座標値を観
測値としてあつかうことができます。
■「単点観測」命名の由来
マニュアル(案)によれば、"空中写真測量の図化作業において、図化機のメスマークにより座標値を測定する「単点」
というものに似ていることから、「単点観測」と命名した。"(48 頁)と記されています。単点観測では座標値が観測値とな
るので、3次元網平均計算などの後処理は不要です。地形測量、応用測量(路線測量、用地測量、河川測量)が対象と
なっています。
■1セット観測
5衛星以上を使い、FIX 解を得てから 10 エポック以上を1セット観測とします。データ取得間隔は1秒です。1エポック
は、GPS 衛星から同時に受信する1回の信号です。
■地形測量
地形・地物などの測定に、単点観測法を使い1セットの観測を行い、それらの場所の座標値を求めます。
観測途中で再初期化を行う場合、観測位置が明瞭な場所で2セットの観測を行い、1セット目とのセット間較差が、水
平(南北⊿N,東西⊿E)ともに20mmの許容範囲であることを確認します。このことによって再初期化が正常であること
を確認します。高さの許容範囲は、30mmです。

■応用測量(路線)
線状築造物建設のための調査、計画、実施設計などの測量に、単点観測法を使います。
線形決定及び中心測量では、各点で2セットの単点観測を行い、1セット目を採用し2セット目は点検観測とします。セッ
ト間較差は、水平(南北⊿N,東西⊿E)ともに 20mm が許容範囲になります。
■応用測量(河川)
河川・海岸などの調査及び河川の維持管理などの調査に単点観測を使います。単点観測は、1セット行います。
地形測量と同様に観測途中で再初期化を行う場合、観測位置が明瞭な場所で2セットの観測を行い、1セット目とのセ
ット間較差が、水平(南北⊿N,東西⊿E)ともに 20mm の許容範囲であることを確認します。このことによって再初期化が
正常であることを確認します。高さの許容範囲は、30mmです。
■応用測量(用地)
土地及び境界などについての調査などに単点観測を使います。
境界点では2セットの単点観測を行い、2セットの平均値を採用します。セット間較差は、水平(南北⊿N,東西⊿E)とも
に 20mm が許容範囲になります。
■周囲の国家基準点座標との整合
単点観測の場合、周辺の国家基準点などとの関連なしに座標値が決まるので、周囲の国家基準点座標や公共基準
点座標との間に不整合を生じる場合があります。その場合、調査地域にある国家基準点や公共基準点の一部とネット
ワーク型 RTK-GPS から得られた値を結合させ、座標変換手法により整合をとることがあります。
座標変換に関しては、マニュアル(案)第 35 条運用基準第 11 項及び第 50 条運用基準に定められていて、その解説
によれば、座標変換方法として次の3つの方法を示しています。
1.ヘルマート変換
2.アフィン変換
3.重み付け補間による方法
座標変換に必要な既知点数は、3点以上とされています。

注 意 事 項
VRS-GPS 測量の単点観測法は、正式な3・4級基準点測量とは言えない。
VRS-GPS測量の単点観測法で求めた世界座標値は、作業規定の中の3・4
級基準点測量に該当すると思われがちですが、VRS方式で3・4級基準測量はで
きるけど、単点観測法で良いとはなっていないのがポイントです。 必ず与点(基準点)から始まって、新点を経由し、与点(基準点)で終わる観測が
必要です。さらに、網平均計算を行って、与点の精度配分を行わないといけません。
ですから、実際のVRS方式を使った基準点測量では、単点観測法の数値は使い
ません。 ただ、実際のリアル精度として、基準点測量程度の精度を持っているかと問われ
れば、1級基準点程度の精度を持っていると答えても、間違いではないでしょう。

衛星飛来予測 (ジェノバのホームページより飛来予測を表示できます。)
ボタンをクリックすると別ウインドウで開きます
衛星飛来予測の見方
最新衛星飛来予測システムでは、観測地域、観測日時および時刻を指定することで、そのときの衛星の配置、測位精度への 影響
度を計算します。
ただし、計算には誤差が含まれますので、実際に観測する際に計算結果とは完全に一致しないことがあります。
衛星数
捕捉可能な衛星の数です。ただし、遮蔽物が何もない場合の数ですので、実際に観測する場合は観測地点の環境により変化します。
ネットワーク型GNSS 測位では、5個以上の衛星を捕捉することができれば精度を得ることができます。
PDOP 値
PDOP は位置精度低下率と呼ばれ、PDOP=1 のとき測位精度が最もよく、PDOP の値が大きくなると測位精度が低下します。
衛星配置図
仰角 15 度以上に存在する衛星の配置図です。 指定した時刻での位置は□マークで、それ以降の衛星の動きは 15 分ごとに○マー
クでプロットされます。 観測現場の環境と照らし合わせて捕捉可能な衛星数の検討にご利用できます。 [地上から見る]ボタンを押
すと東西が反転した配置図が表示されます。 この東西反転画像は、地上から上空を見上げたときに見える配置図です。 魚眼レン
ズを用いて観測現場の上空を撮影した写真と重ね合わせる等のご利用が可能です。
衛星飛来予測の詳しい見方
地域:東京
ご利用年月日:2007 年3 月1 日
時刻: 9:15 から 6 時間
で衛星配置を確認する場合
9:15 から 10:00 頃、10:30 から 15:15 頃が高精度測位可能
な時間帯とわかります。
※計算には誤差が含まれますので、
実際に観測する結果とは完全に一
致しないことがあります。
※観測地点に遮蔽物がある場合、捕
捉可能な衛星数が減少することが
あります

GSR2700ISX
CF-P1(SDR8 RTK+)
キネマティックポール(2m)Bluetooth®無線通信
SWT8ワイアレスユニット
CPTrans-SX9A
【VRS GPS 製品構成】
■CF-P1
GPSコントローラ
■SWT8
ワイアレスユニット
■CPTrans-SX9A
CDMAパケット通信端末装置
■ポール類
キネマティックポール(2m)2脚ポール
■その他
格納ケース
プ
定価(SDR8 RTK+含む)
ソキア VRS-RTK GPS レンタル構成例
■1日レンタル料金 ■長期レンタル料金 ・基本料金 10,000円(税別) ※担当者まで、ご相談下さい。 ・レンタル料金 25,000円(税別) ・送料(貸出時) 2,000円(税別) ※返却時の送料は、お客様ご負担となります。
※上記記載で一部違う機種での構成がある場合がありますので、予めご了承下さい。
北見市田端町37番地26
株式会社 フォーレスト
TEL 0157-33-3702 FAX 0157-33-3703Mail : [email protected]
【お問い合わせ先】
2脚ポール
ロットクランプ
各種バッテリー・充電器類