Embed Size (px)
Citation preview

Functional Validation for Dependability
University of VeronaDepartment of Computer Science
Giuseppe Di Guglielmo
Agenda
• ESD Research Group• Functional Validation for Dependability
– A Methodology for Abstracting RTL Designs to TL Descriptions
– Functional Qualification of TLM verification– The Role of Parallel Simulation on Functional
Verification– HW/SW co-simulation for co-verification
2CREDES Kick-Off MeetingJune 5th, 2009

ESD RESEARCH GROUP
University of VeronaComputer Science Department
3CREDES Kick-Off MeetingJune 5th, 2009
Verona
4CREDES Kick-Off MeetingJune 5th, 2009

5
CS Department
• 8 research areas• 46 lecturers• 60 research assist.• 6 undergrad-
graduate degrees • 2 master degrees• > 1000 students
Best CS Dept. in Italy for teaching and research quality (CENSIS 2006-08)
5CREDES Kick-Off MeetingJune 5th, 2009
6
ESD: research group• Permanent staff:
– prof. Franco Fummi– prof. Tiziano Villa– prof. Nicola Bombieri– prof. Damiano Carra– prof. Graziano Pravadelli– prof. Davide Quaglia
• 10 research assistants• 4 Post-doc• 2 PhD students• xx graduate students
22 People
6CREDES Kick-Off MeetingJune 5th, 2009

7
ESD: research areas (I) • Embedded system
verification– Static verification– Dynamic verification– Semi-formal verification– Hybrid and real-time
systems
• Basic CAD algorithms– Synthesis of sequential and
combinational systems– Discrete event systems– Physical design
• Networked embedded systems– System/Network co-
simulation– System/Network co-design– QoS-enabled design– Sensor networks and M2M
systems
7CREDES Kick-Off MeetingJune 5th, 2009
ESD: research areas (II) • Embedded SW
generation– TLM-RTL synthesis and
abstraction– RTL-to-SW abstraction– TLM transactor generation– Device-driver generation– Embedded SW for
multicore systems– Middleware-based design
• Networking systems– Protocol Design and
Architectures– Performance Evaluation– Network Measurement and
characterization– Overlay Networks
8
more than 250 papers
8CREDES Kick-Off MeetingJune 5th, 2009

9
ESD: teaching• Some undergraduate courses in:
– Computer architecture – Operating systems, Networking– Real-time systems
• Graduate course of study with an embedded systems curriculum:– Electronic design automation– Embedded systems– Networked embedded systems– Multimedia embedded systems– Control embedded systems– Embedded systems architecture
9CREDES Kick-Off MeetingJune 5th, 2009
ESD: projects• 2 European projects in FP6
– ANGEL (mobile gateway for sensors network)
– VERTIGO (HW formal verification)
• 2 European projects in FP7– COCONUT (embedded systems design and verification)
• best evaluation of the overall embedded systems track
– C4C (control for coordination of distributed systems)• 4 joint projects between University of Verona and private companies• 2 national funded projects• 10 research contracts with enterprises
2.5M€ projects funding in the last 5 years10CREDES Kick-Off MeetingJune 5th, 2009

11
ESD spin-off: EDALab• Focus:
– Networked embedded systems• Main products:
– EDA tools• HW/SW/Network co-simulation;• Static/dynamic validation;• RTL-TLM/C++ abstraction;• Sensor network design and management
• Etc;– Middleware
• Mobile terminals;• Sensor networks;• Etc.
– IP-cores• Factory automation;• Multimedia;• Etc; 10 year expertise in the development of hw/sw
models and tools
11CREDES Kick-Off MeetingJune 5th, 2009
FUNCTIONAL VALIDATION FOR DEPENDABILITY
CREDESCentre of Research Excellence in Dependable Embedded Systems
12CREDES Kick-Off MeetingJune 5th, 2009

State of the art (I)• Dependable computing first appears in the 1830’s
in the context of Babbage’s Calculating Engine.• Theories of using redundancy and masking to
build reliable logic structures, from less reliablecomponents, was proposed in ’60.
• Then, masking was integratewith the practical techniques of error detection, fault diagnosis,and recovery into the concept offault-tolerant systems.
13CREDES Kick-Off MeetingJune 5th, 2009
State of the art (II)• The formation of the
– IEEE-CS TC on Fault-Tolerant Computing in 1970;– IFIP WG 10.4 Dependable Computing and Fault Tolerance
in 1980.accelerated the emergence of a consistent set of concepts and terminology.
• In 1992 intentional faults (malicious logic, intrusions) were listed along with accidental faults (physical, design, or interaction faults).
• Recently, the notion of dependability has been extended to incorporate, not only fault tolerance, but also safety.
14CREDES Kick-Off MeetingJune 5th, 2009

State of the art (III)• Major event in measuring dependability was the
introduction of coverage concept.• Mutation analysis and mutation testing gained
consensus as important techniques for coverage estimation.
• What miss are– a widely accepted way of modeling faults (mutants) in
relation to soft and physical defects;– a methodology supported by tools to address the
trade-off among complexity, accuracy and speed;– a trusted methodology proving that solutions
developed for dependability are correct.
15CREDES Kick-Off MeetingJune 5th, 2009
Motivations and Goals (I)• A great concern about having pervasive
electronics solutions into digital systems is related to their reliability– a key factor for their acceptance!
• The goal is to achieve the design of reliable circuits operating in harsh environmental conditions.
• The objectives includes the development of models, tools and methodologies for the validation of designs resistant to reliability detractors.
16CREDES Kick-Off MeetingJune 5th, 2009

Motivations and Goals (II)
• Main tasks– accurate modeling of reliability detractors;– abstraction of their model at the highest level
• defects � faults � mutation operators
– concurrent evaluation of the reliability detractors, to enable realistic fault-injection campaigns;
– development of SoC validation environment at the highest abstraction level
• HW/SW abstraction & HW/SW co-simulation.
17CREDES Kick-Off MeetingJune 5th, 2009
Why we want do this• The development of safe and dependable systems is
an actual challenge which is emphasized further by the high complexity.
• Existing techniques faces the reliability problems using hardware redundancy and guard-banding of key parameters– This approach may give drawbacks on performances
• Increased costs because of the employment of extra resources;• Preventive constraints on speed performances to anticipate
aging effects.• There is lack of tools and methods for the assessment
of reliability at the design level.
18CREDES Kick-Off MeetingJune 5th, 2009

Today vs Tomorrow Design Flow
RT Level IPs &Custom logic
SynthesisGL fault injection
& simulation
HW acceleration
Validation of Safety/Dependable
Features at gate level
OK?
no
TL Abstraction OK?
Today
Tomorrow
Synthesis
TL Fault Injection
& simulation@ SoC level
Validation of Safety/Dependable
Features at TL
ValidationOf Safety/Dependable
Features at gate level
SoC Manufacturing
no
19CREDES Kick-Off MeetingJune 5th, 2009
Tomorrow design flow
• There are three main advantages– allow SoC designers to face the evaluation of
the safety and dependable features early in the design flow;
– limit the need to perform validation of safety features of the SOC at gate-level and/or using HW accelerator solutions;
– concurrently evaluate a wide spectrum of possible reliability detractors (fault models).
20CREDES Kick-Off MeetingJune 5th, 2009

UniVR Area of Contributions
SoCor
ApplicationSystem
Synthesis and
Abstraction
Fault Injection Solutions
HW/SW Co-Simulation
TLM and RTL
modeling
21
Faultsimulation
CREDES Kick-Off MeetingJune 5th, 2009
A METHODOLOGY FOR ABSTRACTING RTL DESIGNS TO TL DESCRIPTIONS
22CREDES Kick-Off MeetingJune 5th, 2009

Transaction Level Modeling (TLM)• TL permits to start SW development very early in the
design flow
Functionalspecif.
Architect.specif Design Fab. Breadboard SW
develop.Sys
integrationSys
validation
Classical design flow
SWdevelop.
Sysintegration
Sysvalidation
GAIN!
23CREDES Kick-Off MeetingJune 5th, 2009
TLM: Advantages• Implementation details are abstracted while
preserving the behavioral aspects of the system– this allows a faster simulation (up to 1,000x) than at
RTL.• System level design exploration and verification
are simplified– IP components and buses can be modified and
replaced in an easier way than at RTL.• An early platform for SW development can be
quickly developed.
24CREDES Kick-Off MeetingJune 5th, 2009

TLM: Modeling Comparison• More emphasis on the data transfer functionality
– less on their implementation details at the early design stage.
clkreqgnt
data_0
data_31
addr_0
addr_31
……
RTL
write (data, addr);
TLM
25CREDES Kick-Off MeetingJune 5th, 2009
TLM: TBV• Transactor-based Verification (TBV) has been
introduced to allow reuse in mixed TL-RTL designs.
M1
M9
M7
Existent RTL IPs
IP-c
ores
reus
e
Testbench& assertion/
propertyreuse
TL
M1
M3
M2 TL Testbenches& Assertions
T
T
T
RTL Testbenches& PropertiesT
RTL
M1
M3
M2
TL Testbenches& Assertions
RTL Testbenches& Properties
T
26CREDES Kick-Off MeetingJune 5th, 2009

TLM: Transactor
RTLmodule
Control inputs
Data inputs
Control outputs
Data outputs
clk
write(addr,data)
…
read(addr,&res)
…
(write_status)
(read_status)
TLmodule Transactor
RTLsignals
clk
RTLsignals
27CREDES Kick-Off MeetingJune 5th, 2009
TLM: Design Languages
Algo
RTL
Synthesis
TLMTLM
Simulink,
C/C++SystemC
VHDL,
Verilog
System
Verilog
--
--
--
--
SystemC OSCITLM library
Abs
tract
ion
28CREDES Kick-Off MeetingJune 5th, 2009

Motivations and Goal (I)• The standard IP reuse
methodology is based on RTL IP reuse via transactor.
• Main problems– transactors coding is error
prone and time consuming;– global simulation/validation
time is bounded by RTL simulation time.
TL iTL i
BUS
MasterMaster
Transactions
Transactions
RTL Slave•Clock and pin accurate•Communication protocol between the transactor and the RTL slave well-defined
RTL Slave•Clock and pin accurate•Communication protocol between the transactor and the RTL slave well-defined
clk
TransactorTransactorclk
29CREDES Kick-Off MeetingJune 5th, 2009
Motivations and Goal (II) • Main goal
– definition of an automatic abstraction methodology of RTL IPs towards TLM;
– compliant to the SystemC OSCI TLM library. • Advantages
– no error prone manual design phases (e.g., transactors coding);
– real TLM simulation/validation time;– distribution of simulation models of IP-cores without
discovering IP.
30CREDES Kick-Off MeetingJune 5th, 2009

RTL SlaveClock and pin accurate
RTL SlaveClock and pin accurate
clk
RTL Slave•Clock and pin accurate•Communication protocol between the transactor and the RTL slave well-defined
RTL Slave•Clock and pin accurate•Communication protocol between the transactor and the RTL slave well-defined
TL iTL i
BUS
MasterMaster
Transactions
TransactorTransactor
Transactions
clk
clk
IPreuse
Sta
ndar
d IP
reus
e m
etho
dolo
gy
Pro
pose
d IP
abs
tract
ion
met
hodo
logy
TL 1 Slave•Clock accurate•Abstraction of data•Identification of Input/Elaboration/Output phases
TL 1 Slave•Clock accurate•Abstraction of data•Identification of Input/Elaboration/Output phases
TL 1TL 1MasterMaster
……
……
clk
clk
1
BUSclk
Methodology Overview (I)
31CREDES Kick-Off MeetingJune 5th, 2009
RTL SlaveClock and pin accurate
RTL SlaveClock and pin accurate
clk
Pro
pose
d IP
abs
tract
ion
met
hodo
logy
TL 1 Slave•Clock accurate•Abstraction of data•Identification of Input/Elaboration/Output phases
TL 1 Slave•Clock accurate•Abstraction of data•Identification of Input/Elaboration/Output phases
TL 1TL 1MasterMaster
……
……
clk
clk
1
BUSclk
Methodology Overview (I)
• Design is still clock-accurate.
• Interface pins are abstracted away.
• Communication protocol is unchanged.
32CREDES Kick-Off MeetingJune 5th, 2009

TL 2 Slave•Abstraction of clock•Compaction of Input/Elaboration/Output phases•Abstraction of the communication protocol which is implemented in the driver
TL 2 Slave•Abstraction of clock•Compaction of Input/Elaboration/Output phases•Abstraction of the communication protocol which is implemented in the driver
TL 2TL 2
BUS
MasterMaster
DriverDriver
2
Methodology Overview (II)
• Clock is removed.• Communication protocol is
implemented by means of a FIFO approach.
• States composing an Input/Elaboration/Output sub-phases are collapsed into macro states.
• A driver is automatically generated to allow the master to control the slave execution.
33CREDES Kick-Off MeetingJune 5th, 2009
Methodology Overview (III) • A TL3 module is a pure
function call-based interface with no communication events– FIFO channels are not used
anymore;– point-to-point communication is
established between master and slave.
• A slave is a passive module that implements only two functions– write() which is called by the
master to pass input data and start the slave computation;
– read() which is called by the master after a write() to retrieve the computation result.
TL 3 Slave•Removal of the bus•Abstraction of the driver
TL 3 Slave•Removal of the bus•Abstraction of the driver
TL 3TL 3MasterMaster
DriverDriver
3
34CREDES Kick-Off MeetingJune 5th, 2009

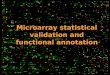
Experimental Results: Simulation Times
1
10
100
1000
Sim
ulat
ion
Tim
e (s
.)
RTL TL2 TL3 Man_TL3
37,910,511,19,34,6Man_TL3
38,911,813,214,95,1TL3
40,253,173,989,137,5TL2
68,2629,0647,2754,8439,1RTL
B01ADPCMDistDivRoot
37,910,511,19,34,6Man_TL3
38,911,813,214,95,1TL3
40,253,173,989,137,5TL2
68,2629,0647,2754,8439,1RTL
B01ADPCMDistDivRoot
35CREDES Kick-Off MeetingJune 5th, 2009
Conclusions
• A methodology to automatically abstract RTL designs towards TLM levels.
• Alternative to TBV– NO slow down the overall simulation;– prevent error-prone manual abstractions;– prevent errors related to the design of
transactors;– allow the distribution of simulation models of
IP-cores without discovering IP.
36CREDES Kick-Off MeetingJune 5th, 2009

FUNCTIONAL QUALIFICATION OF TLM VERIFICATION
37CREDES Kick-Off MeetingJune 5th, 2009
Mutation Analysis
• Perturbation-based technique for software unit testing.
• M is known as a mutant of DUV D– M is formed by modifying a single statement
of D according to some predefined rule.
• Coupling effect – a test pattern that detects simple faults in a
program detects most complex faults.
38CREDES Kick-Off MeetingJune 5th, 2009

Mutation Testing Process• Strong Mutation Analysis.• Weak Mutation Analysis.• Mutation score
– MS(D,T)= K / (M-E)
HDL Mutation operator setsCLR Constant Limit replacement. CSR Constant for Scalar Variable ReplacementSUR Signed/Unsigned ReplacementSAR Signal Assignment ReplacementCOR Conditional Operator ReplacementLER Level Replacement…
All mutants
dead?
Input test program
Create mutants
Input test cases
Program Patterns
Run T on each live mutant
Analyze and mark equivalent
mutants
T
F
Quit
39CREDES Kick-Off MeetingJune 5th, 2009
Functional Qualification (I)• The creation of testbenches still poses the
question whether the testbenches are correct and sufficient.
• FQ is the first technology to provide an objective answer to the question– Quis custodiet ipsos custodes?– Who shall guard the guards?
• FQ provides an automated and objective measure of the quality of the (co-)verification environment.
40CREDES Kick-Off MeetingJune 5th, 2009

Functional Qualification (II)
• FQ is based on Mutation Analysis.• Uses a meta-model to avoid the need to
recompile each mutation.• FQ considers a mutant to have been killed
if a testcase fails– CertitudeTM tool from SpringSoft.
41CREDES Kick-Off MeetingJune 5th, 2009
Functional Qualification Framework• If there were a bug in your design, could the verification
environment find it?
42CREDES Kick-Off MeetingJune 5th, 2009

TLM Mutation Fault Model (I)• A mutation model, targeting the primitives of SystemC
TLM 2.0 library, has been developed as follow1. Formalize the behavior of the TLM 2.0 communication
primitives by using EFSMs;2. Define the mutations for EFSMs, based on an extension of the
transition fault model;3. Identify relations between the proposed mutations and typical
design errors.
TLM communicationprimitives
SystemC TLM 2.0 library
1Mutations on
primitives
2TLM
designerrors
3
43CREDES Kick-Off MeetingJune 5th, 2009
TLM Mutation Fault Model (II)• Starting point: Transition Fault Model
– for FSM (Chow ‘78); – target
• boolean functions on transitions;• destination states of transitions.
• Extensions to cover EFSM– Mutations on destination states;– Mutations on enabling functions;– Mutations on update functions.
TLM communicationprimitives
Mutations onprimitives
44CREDES Kick-Off MeetingJune 5th, 2009

Conclusions• The concept of Functional Qualification could
be applied to– TLM 2.0 SystemC.
• A mutation model for communication primitives– primitives formalized by EFSMs;– mutation model affects state and transitions;– mutations correspond to design errors.
• A mutation model for C++ functionalities.
45CREDES Kick-Off MeetingJune 5th, 2009
THE ROLE OF PARALLEL SIMULATION ON FUNCTIONAL VERIFICATION
46CREDES Kick-Off MeetingJune 5th, 2009

• Fault simulation is used in test generation to determine the fault coverage of a test set.
• Complex design � large number of faults� fast and efficient fault simulation
Fault simulation
Test set
��
� �
��
�Faultlist
47CREDES Kick-Off MeetingJune 5th, 2009
• Fault simulation at bit-level– Serial fault simulation
• Faults are simulated one at a time.– Parallel fault simulation
• Faulty circuits are simulated simultaneously; • One fault per faulty circuit.
– Concurrent fault simulation• More faults are simulated per faulty circuit.
– Deductive fault simulation• Fault free circuit is simulated and the list of faults is deduced.
– Fault models• stuck-at, bridge,…
�
�
State of the ArtFaulty circuitReference circuit
�
�
�
�
��
�
�
�
�
��
sa0
48CREDES Kick-Off MeetingJune 5th, 2009

State of the Art• Fault simulation at functional level
– Serial fault simulation• Faults are simulated one at a time;
– Parallel fault simulation• Multiple instances of the design on
parallel architectures;– Cons
• Word vectorization is not possible as at bit-level;– Pros
• Simulation is faster than at bit-level;• Questions rise:
– Can bit-level parallelization produce better performance results than serial functional simulation? In which cases?
module( M )
port ( … )
begin…
end
module( M )
port ( ...fp…)
begin… fp …
end
Faulty circuitReference circuit
49CREDES Kick-Off MeetingJune 5th, 2009
Goal
• Parallel functional fault simulation– How to benefit from the use of
bit-level parallel simulation techniques for simulating functional-level faults.
50CREDES Kick-Off MeetingJune 5th, 2009

RTL code
Functional fault injection
Fault-injectedRTL code
Synthesis
Fault-injectedbit-level code
Functional ATPG
Testcases
bit-level simulation report
RTLsimulation report
bit-levelparallel fault simulation
RTLserial fault simulation
Comparison
Framework
Issues
Fault model?
Parallelization?
Fault engine? Simulation kernel?
51CREDES Kick-Off MeetingJune 5th, 2009
The functional fault modelFunctional fault model
butparallel simulation at
bit-level
�Fault model has to be
synthesizable
RTL
fault injectionmodule( M )
port ( … )
begin…
end
module( M )
port ( ...fp… )
begin… fp …
end
reference copies
Net
list
synthesis
vectorization
52CREDES Kick-Off MeetingJune 5th, 2009

The functional fault model
• Different fault models � proposed techniques can be widely adopted.
• Bit coverage fault model– Objective
• Correlate the RTL faults with the bit-level ones.– Similar to stuck-at fault model but on RTL data types.
• Mutant fault model– Objective
• Functional verification.– Different types of code mutations.
53CREDES Kick-Off MeetingJune 5th, 2009
Functional fault parallelization• Vectorization
– Bit-blasted netlist;– Each bit of the netlist is substituted with a vector of bits;– Each operator with the corresponding bitwise operator;– C implementation: vectorized bit = machine word.
wire A ; wire [ 1 : WIDTH ] A ;
vectorization
Original Netlist Vectorized Netlist
Refe
renc
e cop
y
typedef uint32_t machine_word_t;
typedef uint64_t machine_word_t;
…
C
54CREDES Kick-Off MeetingJune 5th, 2009

Functional fault parallelization• Concurrency
– Into each netlist-copy many faults are activated at the same time;– If a faults conflicts, it is disabled and outputs and registers are
reset to the reference values.
1
1
2 3
2
4
3
Node
Fault
Impact
55CREDES Kick-Off MeetingJune 5th, 2009
Experimental resultsDesign Fault
modelFault # SSE time PSE time FC% Speedup
%b10 bitcov 244 9.647 7.504 91.0 22.21
b04 bitcov 398 2.816 14.194 99.0 -403.87
b10 mutant 185 25.319 7.984 81.1 68.46
b04 mutant 66 10.337 6.728 74.2 34.94
hc11 mutant 2245 811.115 204.341 49.8 74.81
am2910 bitcov 3608 755.82 505.23 83.3 33.15
am2910 mutant 2763 2219.46 636.98 76.5 71.3
SSE : serial simulation engine (RTL)PSE: parallel simulation engine (bit-level)FC%: fault coverage percentage
56 / 23CREDES Kick-Off MeetingJune 5th, 2009

Experimental results
• Why bad results for b04?– the greater number of faults are classified early– parallelism is not fully exploited
not y
et c
lass
ified
faul
ts
simulation time
PSE SSE
57 / 23CREDES Kick-Off MeetingJune 5th, 2009
Conclusions
• Performances depend on abstraction level– RTL simulation is faster than the bit-level
simulation;– The objective is the overall fault simulation
time• It could be lower thanks to parallel approach that is
not applicable at RT level.
58CREDES Kick-Off MeetingJune 5th, 2009

HW/SW CO-SIMULATION FOR CO-VERIFICATION
59CREDES Kick-Off MeetingJune 5th, 2009
HW/SW co-simulation
• An Instruction Set Simulator (ISS) and the corresponding simulator reproduces the behavior of the CPU and the SW modules.
• An HW Description Language (HDL) reproduces the behavior of HW components.
• Co-simulation HDL+ISS– Integrated use of HDL and ISS;– Needs communication between HDL and ISS.
60CREDES Kick-Off MeetingJune 5th, 2009

HW/SW co-simulation architecture
SystemCKernel
SystemCModules
SystemC
iss_port
QEmu-SystemCWrapper
ISSGuest Machine
Device Drivers
ApplicationSoftware
QEMU User Space Emulator
Testbenches
I/O Memory
Host Machine Socket IPC
61CREDES Kick-Off MeetingJune 5th, 2009
SystemC/QEMU co-simulation• Implementing co-simulation requires modification
to– the QEMU both to communicate with the SystemC
simulator and to manage the HW device;– the SystemC simulator kernel
• add the capability of reading and interpreting the QEMU messages;
• sending interrupts to QEMU whenever the HW models generate them.
• These operations must be transparent to the designer who just writes the HW/SW models.
62CREDES Kick-Off MeetingJune 5th, 2009

The QEMU side• The actors involved in the QEMU side of the
communication are– Application
• a user space application that interacts with a device through a DD.
– Device driver• a kernel module that accesses a device through the mapped
memory.– I/O memory
• a memory region where the device registers are mapped. Accesses to must be caught by QEMU-SystemC Wrapper.
– QEMU-SystemC Wrapper• this module forwards the requests to the SystemC side of co-
simulation.
63CREDES Kick-Off MeetingJune 5th, 2009
APPLICATION II LEV. DRIVER I LEV. DRIVER QEMU-SYSTEMC WRAPPER SYSTEMC
Invokes the ioctlfunction:
arg = { DATA, ADDR }
ioctl ( ecc,ECC_WRITE, arg ) ecc_ioctl( ecc, file,
ECC_WRITE, arg)
do_write( DATA, ADDR) Write to the DATAaddress the valuecontained bypacket
Write to the ADDRaddress the address containedby packet
Write to theCOMM addressthe operation type (write = 1)
First packet sent via socket:iss_message_t.type = 1;iss_messate_t.MemElem = value;iss_message_t.addr = DATA;iss_message_t.lenght = sizeof( value);
Second packet sent via socket:iss_message_t.type = 1;iss_messate_t.MemElem = address;iss_message_t.addr = ADDR;iss_message_t.lenght = sizeof( address);
Third packet sent via socket:iss_message_t.type = 1;iss_messate_t.MemElem = 1;iss_message_t.addr = COMM;iss_message_t.lenght =
sizeof( unsigned int);
Receives valueon the DATA port
Receives addresson the ADDR port
Receives 1 on the COMM port
The write operationis performed
QEMU catches MEM access request and forwards it to the SystemC side via sockets.
64CREDES Kick-Off MeetingJune 5th, 2009

The SystemC side
control_register
address_register
data_register
read_iss_data_registerset data_register
read_iss_address_registerset address_register
read_iss_command_registerset command_registerset iss_control_register = 0run_io_process.notify()
entrycase WRITE:set request
(data_register,address_register)
case READ:set request
(data_register,address_register)
get responseset iss_data_register
set iss_control_register = 1
iss_data_register iss_address_register iss_command_register iss_control_register
response
request
As soon as a request from QEMU is received via socket, the kernel extracts information from the request packets and it sets the correct values on the ISS ports.
65CREDES Kick-Off MeetingJune 5th, 2009
HW/SW co-verification of platforms
SoftwareModules
Testbench Generation
HardwareModules
Test Response Evaluation
Co-Simulation Environment
SW Fault Model HW Fault Model
Functional Co-Verification Environment
Fault CoverageEvaluation
TestbenchModification
Functional Qualification
66CREDES Kick-Off MeetingJune 5th, 2009

Conclusions
• A HW/SW co-simulation framework has been proposed which supports all mechanisms used by devices drivers to communicate with HW devices.
• NO adaptation in device drivers and HW models to handle synchronization messages.
• HW/SW co-verification of platform models.67CREDES Kick-Off MeetingJune 5th, 2009
References• A Methodology for Abstracting RTL Designs into TL Descriptions
N. Bombieri, F. Fummi, G. PravadelliMEMOCODE 2006
• Functional Qualification of TLM VerificationN. Bombieri, F. Fummi, G. Pravadelli, M. Hampton, F. LetombeDATE 2009
• The Role of Parallel Simulation in Functional VerificationG. Di Guglielmo, F. Fummi, M. Hampton, G. Pravadelli, F. StefanniHLDVT 2007
• On the Functional Qualification of a Platform ModelG. Di Guglielmo, F. Fummi, G. Pravadelli, M. Hampton, F. LetombeDFT 2009 (submitted)
68CREDES Kick-Off MeetingJune 5th, 2009

Thanks!
69CREDES Kick-Off MeetingJune 5th, 2009