Embed Size (px)
Citation preview

Geometria diferencial — Seminaris
Curs 2008/2009
E. Gallego, D. Marın, E. Miranda
Index
1 Gal.leries. Primers calculs amb maple 51.1 Exploratorium digital. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 El programa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Documentacio del programa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Galeries de corbes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Galeria de superfıcies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6 El lloc web ‘Famous Curves Index’. . . . . . . . . . . . . . . . . . . . . . . . . 61.7 Calcul del centre i radi de curvatura com a lımit de circumferencies secants. . 71.8 Metode alternatiu utilitzant la teoria del contacte. . . . . . . . . . . . . . . . . 71.9 Representacio grafica dels cercles osculadors. . . . . . . . . . . . . . . . . . . . 71.10 Identifiqueu la corba plana parametritzada per . . . . . . . . . . . . . . . . . . 71.11 Cicloide. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Teoria global de corbes planes I 92.1 Curvatura total. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Rotacio de les tangents. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3 Teorema dels quatre vertexs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Funcio de suport. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5 Notes finals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Teoria global de corbes planes II 123.1 Paradoxa de Bertrand. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2 Primera solucio: fixant els extrems. . . . . . . . . . . . . . . . . . . . . . . . . 123.3 Segona solucio: fixant el punt mitja. . . . . . . . . . . . . . . . . . . . . . . . . 123.4 Tercera solucio: fixant la distancia a l’origen. . . . . . . . . . . . . . . . . . . . 123.5 Que passa? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.6 Espai de rectes al pla. Mesura de conjunts de rectes. . . . . . . . . . . . . . . . 143.7 Formula de Cauchy-Crofton. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.8 Mesura cinematica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.9 Funcio suport (de nou). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.10 Suma de Minkowski. Area mixta. . . . . . . . . . . . . . . . . . . . . . . . . . 163.11 Mesura dels moviments que fan que dos convexos es tallin. . . . . . . . . . . . 173.12 Formules de Poincare i de Blaschke. . . . . . . . . . . . . . . . . . . . . . . . . 173.13 Desigualtat isoperimetrica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.14 Referencies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1
4 Corbes a l’espai amb maple 204.1 Calcul de la curvatura, torsio i triedre de Frenet d’una corba. . . . . . . . . . . 204.2 Visualitzacio del triedre de Frenet d’una corba a l’espai. . . . . . . . . . . . . . 204.3 Teorema fonamental de la teoria local de corbes planes. . . . . . . . . . . . . . 204.4 Teorema fonamental de la teoria local de corbes a l’espai. . . . . . . . . . . . . 214.5 Esferes osculadores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.6 Representacio grafica de les esferes osculatrius d’una corba. . . . . . . . . . . . 234.7 Corbes esferiques. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.8 Teorema de Fary-Milnor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 Sessio de problemes de corbes a l’espai 255.1 Esferes osculadores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.2 Corbes esferiques. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.3 Helixs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.4 Corbes de Bertrand. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6 Tubs. Teoremes de Fenchel i de Fary-Milnor. 296.1 Corbes paral.leles en el pla. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296.2 Area d’un convex paral.lel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296.3 Superfıcie paral.lela . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296.4 Superfıcie tubular d’una corba a l’espai. . . . . . . . . . . . . . . . . . . . . . . 306.5 Volum d’un tub a l’espai. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316.6 Teorema de Fenchel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316.7 Teorema de Fary-Milnor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
7 Geodesiques i altres corbes especials sobre superfıcies 337.1 Equacions d’Euler-Lagrange. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337.2 Equacions d’Hamilton. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337.3 Geodesiques i lınies assimptotiques sobre superfıcies de revolucio. . . . . . . . 347.4 Estudi de l’el.lipsoide de tres eixos amb maple. . . . . . . . . . . . . . . . . . . 357.5 Lınies de curvatura i geodesiques sobre l’el.lipsoide de tres eixos. . . . . . . . . 37
8 Sessio de problemes sobre superfıcies 398.1 Superfıcies de revolucio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398.2 Isometries. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398.3 Geodesiques. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408.4 El pla hiperbolic. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408.5 Derivada covariant i transport paral.lel. . . . . . . . . . . . . . . . . . . . . . . 41
9 Els teoremes de Gauss i Stokes i les equacions de Maxwell 429.1 Circul.lacio i flux d’un camp vectorial. . . . . . . . . . . . . . . . . . . . . . . . 429.2 El flux sortint a traves de dues superfıcies tancades amb una regio comuna. . . 439.3 El flux sortint d’un cub petit. . . . . . . . . . . . . . . . . . . . . . . . . . . . 439.4 El teorema de Gauss o de la divergencia. . . . . . . . . . . . . . . . . . . . . . 439.5 La circul.lacio al llarg de dues corbes tancades que comparteixen un arc comu. 439.6 La circul.lacio d’un camp vectorial al llarg d’un quadrat petit. . . . . . . . . . 449.7 El teorema de Stokes o del rotacional. . . . . . . . . . . . . . . . . . . . . . . . 449.8 Forca exercida sobre una carrega electrica. . . . . . . . . . . . . . . . . . . . . 449.9 Les lleis de l’electromagnetisme. . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2

9.10 Una aplicacio dels teoremes de Gauss i Stokes a la fısica: Les equacions deMaxwell. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
9.11 Interpretacio fısica de les lleis de l’electromagnetisme. . . . . . . . . . . . . . . 469.12 Altres aplicacions de Stokes i Gauss a la fısica . . . . . . . . . . . . . . . . . . 479.13 Referencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
10 Calcul vectorial amb maple 4810.1 Definicio de camps vectorials i calcul de la divergencia i del rotacional. . . . . 4810.2 Integrals de lınia i superfıcie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4810.3 Il.lustracio dels teoremes de Green, Gauss i Stokes. . . . . . . . . . . . . . . . . 4810.4 Interpretacio geometrica de la divergencia i del rotacional. . . . . . . . . . . . 4910.5 El camp de Hopf. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5110.6 Camp de Lorenz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5210.7 Annex: codi maple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
11 Espai de Minkowski 5411.1 Invariancia de Galileu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5411.2 Transformacions de Lorentz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5411.3 Adicio de velocitats. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5511.4 Longitud i temps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5611.5 Simultaneıtat i causalitat. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5611.6 Interval d’espai temps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5711.7 Transformacions de Lorentz. Forma vectorial. . . . . . . . . . . . . . . . . . . 5711.8 Espai (vectorial) de Minkowski . . . . . . . . . . . . . . . . . . . . . . . . . . . 5711.9 Direccio de temps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5811.10Grup de Lorentz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
12 Formulacio relativista de les equacions de Maxwell 6012.1 Quadri-vectors de l’espai de Minkowski. . . . . . . . . . . . . . . . . . . . . . . 6012.2 Quadri-vectors energia-moment i treball-forca. . . . . . . . . . . . . . . . . . . 6012.3 Quadri-vectors carrega-corrent i potencial electromagnetic. . . . . . . . . . . . 6112.4 Quadri-vector gradient i operador dalambertia. . . . . . . . . . . . . . . . . . . 6112.5 La 2-forma electromagnetica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6212.6 Operador ∗ de Hodge i formulacio intrınseca de les equacions de Maxwell. . . . 63
13 De Stokes a De Rham passant per Poincare 6413.1 Relacio entre les integrals de lınia, de superfıcie i sobre cadenes. . . . . . . . . 6413.2 Relacio entre gradient, rotacional, divergencia i derivada exterior. . . . . . . . 6513.3 Relacio entre els teoremes classics i el teorema de Stokes generalitzat. . . . . . 6513.4 Relacio entre formes tancades i formes exactes. . . . . . . . . . . . . . . . . . . 6513.5 Relacio entre formes tancades i topologia. . . . . . . . . . . . . . . . . . . . . . 6613.6 Relacio entre formes tancades i analisi complexa. . . . . . . . . . . . . . . . . . 6713.7 Relacio entre formes tancades i enllacos. . . . . . . . . . . . . . . . . . . . . . 6713.8 Referencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
14 Teoremes de Gauss-Bonnet i Poincare-Hopf 6814.1 Generalitzacio del umlaufsatz. . . . . . . . . . . . . . . . . . . . . . . . . . . . 6814.2 Teorema de Gauss-Bonnet local . . . . . . . . . . . . . . . . . . . . . . . . . . 6814.3 Teorema de Gauss-Bonnet global. . . . . . . . . . . . . . . . . . . . . . . . . . 6814.4 Index d’un camp vectorial sobre una superfıcie. . . . . . . . . . . . . . . . . . . 69
3

14.5 El teorema de Poincare-Hopf. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4
1 Gal.leries. Primers calculs amb maple
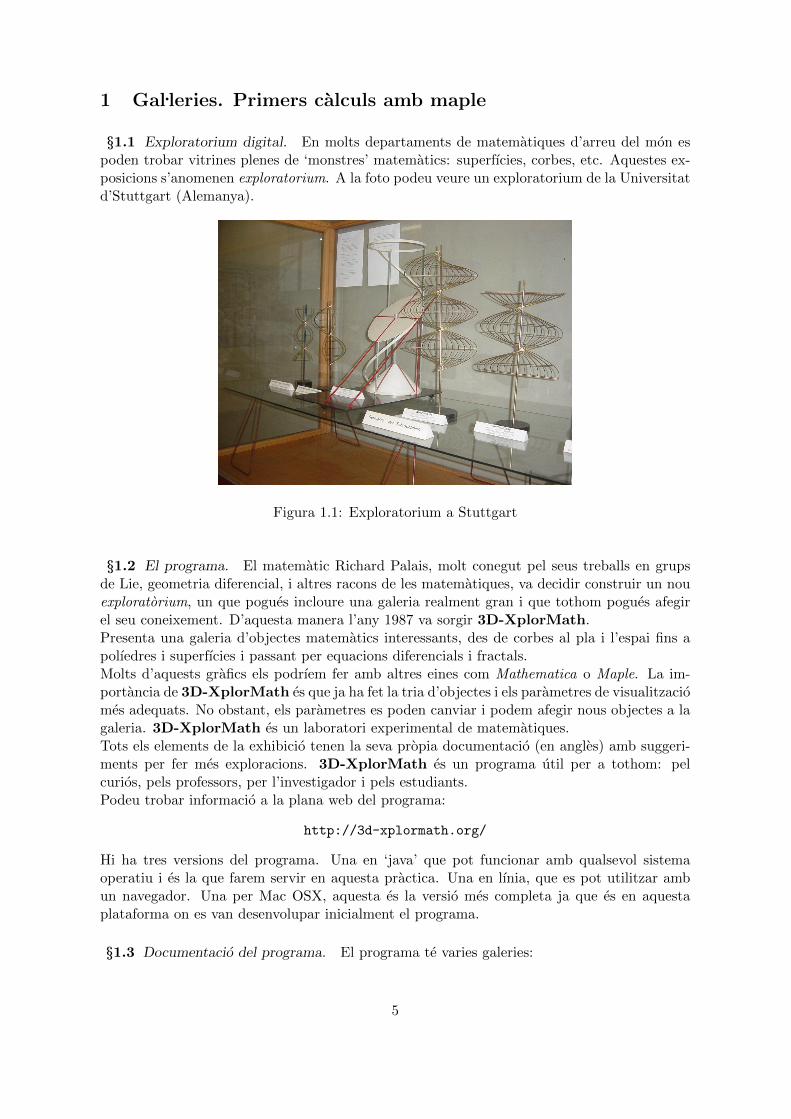
§1.1 Exploratorium digital. En molts departaments de matematiques d’arreu del mon espoden trobar vitrines plenes de ‘monstres’ matematics: superfıcies, corbes, etc. Aquestes ex-posicions s’anomenen exploratorium. A la foto podeu veure un exploratorium de la Universitatd’Stuttgart (Alemanya).
Figura 1.1: Exploratorium a Stuttgart
§1.2 El programa. El matematic Richard Palais, molt conegut pel seus treballs en grupsde Lie, geometria diferencial, i altres racons de les matematiques, va decidir construir un nouexploratorium, un que pogues incloure una galeria realment gran i que tothom pogues afegirel seu coneixement. D’aquesta manera l’any 1987 va sorgir 3D-XplorMath.Presenta una galeria d’objectes matematics interessants, des de corbes al pla i l’espai fins apolıedres i superfıcies i passant per equacions diferencials i fractals.Molts d’aquests grafics els podrıem fer amb altres eines com Mathematica o Maple. La im-portancia de 3D-XplorMath es que ja ha fet la tria d’objectes i els parametres de visualitzaciomes adequats. No obstant, els parametres es poden canviar i podem afegir nous objectes a lagaleria. 3D-XplorMath es un laboratori experimental de matematiques.Tots els elements de la exhibicio tenen la seva propia documentacio (en angles) amb suggeri-ments per fer mes exploracions. 3D-XplorMath es un programa util per a tothom: pelcurios, pels professors, per l’investigador i pels estudiants.Podeu trobar informacio a la plana web del programa:
http://3d-xplormath.org/
Hi ha tres versions del programa. Una en ‘java’ que pot funcionar amb qualsevol sistemaoperatiu i es la que farem servir en aquesta practica. Una en lınia, que es pot utilitzar ambun navegador. Una per Mac OSX, aquesta es la versio mes completa ja que es en aquestaplataforma on es van desenvolupar inicialment el programa.
§1.3 Documentacio del programa. El programa te varies galeries:
5
i per cada galeria hi ha documentacio. Com que existeix mes documentacio en angles que enaltres llengues es preferible que al menu Documentacion, a l’apartat Documentation Prefs,poseu l’adreca http://3d-xplormath.org/j/docs/en que es la corresponent a la documen-tacio en angles.
§1.4 Galeries de corbes. Trieu la galeria de corbes planes i feu una ullada a la llista de corbes.Es troba al menu Curvas planas. Seleccioneu la lemniscata. Fent clic amb el ratolı podeuaturar l’animacio, seleccionant Crear tornareu a veure l’animacio i amb la barra d’espai podeula podeu aturar. Al menu Acciones veureu altres accions diferents que es poden realitzar sobreuna corba.
Exercici 1.4.1. Doneu una definicio sintetica de la lemniscata (de Bernoulli).Trieu veure els cercles oscul.ladors d’aquesta corba. Aixo nomes es primer exemple. Fem-nemes.
Exercici 1.4.2. Veieu com es forma la tractriu (Tractrix). Podeu donar una definicio? Di-buixeu les seves corbes paral.leles.
Exercici 1.4.3. Feu el dibuix d’una corba γ(t) amb curvatura t, un altre amb curvatura t2 iun altre amb curvatura | sin t| (la funcio valor absolut s’escriu abs, feu variar el parametre talla on calgui). Dibuixeu els cercles oscul.ladors, l’evoluta i les corbes paral.leles.Tambe tenim galeria de corbes a l’espai. Canvieu la galeria i mireu la llista de possibles corbesde l’espai.
Exercici 1.4.4. Un cop a la galeria de corbes de l’espai, trieu la famosa volta de Viviani.Moveu-la una mica per veure com es. Veiu-la en forma de tub (menu Acciones). Mostreu elseu triedre de Frenet (Marco ortonormal).
§1.5 Galeria de superfıcies. Trieu ara la Galeria de Superfıcies, trobareu diferents famılies.Seleccioneu les superfıcies mınimes. Dibuixeu la de Lopez-Ros. Es tracta d’una superfıcie quelocalment minimitza l’area (ja ho veurem al llarg del curs). Trieu els colors en funcio de lacurvatura de Gauss.
§1.6 El lloc web ‘Famous Curves Index’. Aquesta es una galeria molt util sobre corbesplanes. Es troba a
http://www-groups.dcs.st-and.ac.uk/~history/Curves/Curves.html
Obriu el vostre navegador preferit i aneu-hi.
Exercici 1.6.1. Trobeu la definicio d’evoluta.
Exercici 1.6.2. Trobeu la definicio en forma implıcita del Folium de Descartes. Es tracta d’unacorba quadratica? potser es cubica? Dibuixeu la seva evoluta.
6

§1.7 Calcul del centre i radi de curvatura com a lımit de circumferencies secants. Con-siderem una parametritzacio regular x(t) = (x(t), y(t)) d’una corba plana. Cerquem la cir-cumferencia que millor aproxima a la corba en el punt x(0). Per aixo considerem el desenvo-lupament de Taylor en t = 0 de x(t) i y(t)
x(t) =3∑i=0
xiti
i!+O(t4) i y(t) =
3∑i=0
yiti
i!+O(t4),
on xi = dix(t)dti
∣∣t=0
i yi = diy(t)dti
∣∣t=0
. Considerem la circumferencia que passa pels punts x(−ε),x(0) i x(ε). El seu centre c(ε) = (cx(ε), cy(ε)) es la interseccio de les mediatrius dels dossegments que uneixen els punts x(−ε) i x(0) d’una part i els punts x(0) i x(ε) d’una altra. Elseu radi es r(ε) = ‖c(ε)− x(0)‖. El centre i el radi de curvatura venen donats pels lımits dec(ε) i r(ε) quan ε tendeix a zero. Calculeu aquests lımits en funcio de xi, yi. El cercle lımits’anomena el cercle osculador de la corba x(t) al punt x(0).
§1.8 Metode alternatiu utilitzant la teoria del contacte. Considerem la famılia de totesles circumferencies del pla donades per les equacions fabr(x, y) = (x − a)2 + (y − b)2 − r2.L’objectiu es trobar els parametres a, b, r de manera que fabr(x(t)) sigui el mes petit possiblequan t es proper a zero. De manera mes precisa, el que demanem es que la funcio d’unavariable g(t) = fabr(x(t)) tingui el maxim nombre de derivades nul.les quan s’avaluen a t = 0.Observeu que com tenim tres parametres lliures es natural imposar tres condicions g(0) = 0,g′(0) = 0 i g′′(0) = 0. Escriviu el sistema d’equacions corresponent i resoleu-lo. Comproveuque el cercle que determina coincideix amb el de l’apartat anterior.
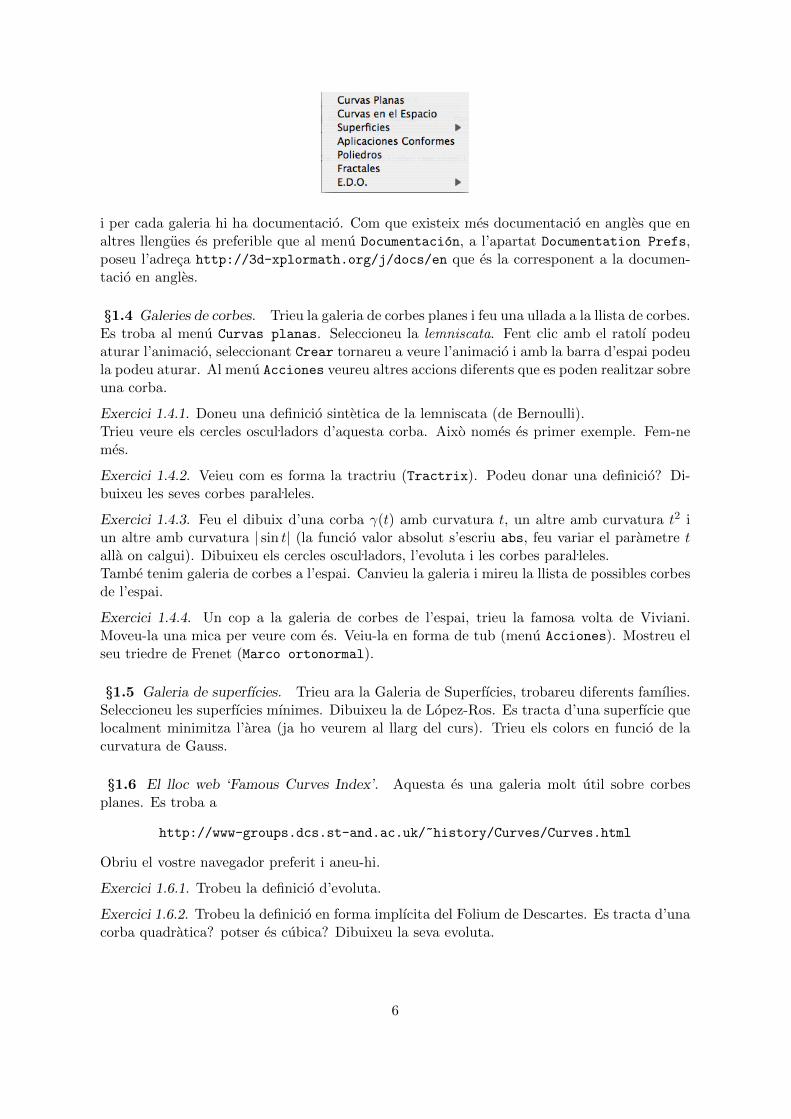
§1.9 Representacio grafica dels cercles osculadors. Una espiral logarıtmica es una corba queadmet per equacio ρ = exp(cθ) en coordenades polars, on c es una constant.
(a) Trobeu una parametritzacio d’una espiral logarıtmica i representeu graficament la corbacorresponent al valor c = 1
50 per θ ∈ [0, 10π].
(b) Considereu una particio de l’interval de definicio de la parametritzacio anterior i calculeuels centres i els radis dels cercles osculadors de C en els punts corresponents.
(c) Feu-ne una representacio grafica.
Observeu que cada punt del pla es troba sobre una unica circumferencia osculadora a l’es-piral logarıtmica. La funcio que a cada punt (x, y) del pla li fa correspondre el radi de lacircumferencia osculadora que passa per aquest punt no es diferenciable. Per que?
§1.10 Identifiqueu la corba plana parametritzada per
t 7→
(3t(4− 3
√4t4)
2(4 + t6),3t2(t2 + 3
√4)
4 + t6
).
§1.11 Cicloide. A Moby Dick de Herman Melville (1851) trobem la seguent cita:Quan no s’utilitzen, aquestes calderes es conserven considerablement netes. A vegades lespoleixen amb sabo de sastre i sorra fins que brillen per dins com ponxeres de plata. Durant lesguardies nocturnes, alguns vells mariners cınics s’hi entaforen, s’hi ajoquen i fan una becadeta.Quan els mariners es dediquen a polir-les -un home a cada caldera, tocar a tocar- es passenmoltes comunicacions confidencials per damunt els llavis de ferro. Tambe es un lloc adient per
7
Figura 1.2: Cercles osculadors d’una espiral logarıtmica.
a profundes meditacions matematiques. Fou dins la caldera de ma esquerra del Pequod, ambel sabo de sastre que m’envoltava per totes bandes, que per primera vegada em va impressionarel fet remarcable que, en geometria, tots els cossos que llisquen al llarg de la corba cicloide, elmeu sabo de sastre per exemple, baixen en el mateix espai de temps des de qualsevol punt.
(La destil.leria, Moby Dick)
Verifiquem aquesta propietat de la cicloide, mes precisament, en una cicloide invertida eltemps que triga un cos que cau lliscant per la corba per efecte de la gravetat sense fregamenten arribar al punt mes baix es independent del punt de partida.
(i) Doneu una parametritzacio γ(λ) = (x(λ), y(λ)) de la cicloide invertida.
(ii) Sigui θ el parametre del punt d’arribada. Calculeu la velocitat v(θ) amb que arriba uncos que surt d’un punt γ(α) fixat al punt γ(θ).
(Indicacio: Recordeu la llei de conservacio de l’energia i les expressions de l’energiapotencial i cinetica, Ep = mgh i Ec = mv2/2 respectivament).
(iii) Calculeu la distancia recorreguda entre γ(α) i γ(θ).
(iv) Sigui t(θ) la reparametritzacio corresponent al moviment fısic d’un cos que llisca sensefregament per la cicloide amb t(α) = 0. Calculeu t(π) (i.e. el temps d’arribada al puntmes baix) i comproveu que no depen de α.
Indicacio: Utilitzeu l’equacio diferencial
ds(θ(t))
dt=ds(θ)
dθθ′(t) = v(θ)
d’on es dedueix
t(π) =
∫ t(π)
0v(θ)−1ds(θ)
dθθ′(t)dt =
∫ π
αv(θ)−1ds(θ)
dθdθ
La cicloide tambe verifica que es la braquistocrona, es a dir, la corba al llarg de la qual unapartıcula llisca sota l’accio de la gravetat i sense fregament en un temps mınim d’un punt Aa un punt B situats en verticals diferents.
8

2 Teoria global de corbes planes I
§2.1 Curvatura total.
Exercici 2.1.1. Sigui x : [a, b]→ R2 una parametritzacio per l’arc d’una corba plana C. Proveuque existeix una funcio diferenciable θ : [a, b] → R tal que t(s) = x′(s) = (cos θ(s), sin θ(s)).Recordeu que θ′(s) es la curvatura amb signe de C en el punt x(s). Indicacio: Per provarl’existencia de θ(s) considereu la integral
∫ t0 (u(s)v′(s)− v(s)u′(s)) ds on t(s) = (u(s), v(s)).
Definicio. La curvatura total d’una corba plana C es la integral de la seva curvatura∫C k :=∫ b
a k(s) ds = θ(b)− θ(a) i mesura la rotacio del vector tangent al llarg de C.
Definicio. Una corba parametritzada regular x : [a, b] → R2 es diu tancada si existeix unaextensio diferenciable x : R→ R2 de x que sigui (b− a)-periodica. Observeu que la curvaturatotal d’una corba tancada es de la forma 2πk amb k ∈ Z. Aquest enter s’anomena el nombrede rotacio de x.
Exercici 2.1.2. Construıu una corba plana tancada amb un nombre de rotacio k ∈ Z donat.
§2.2 Rotacio de les tangents.
Definicio. Una corba parametritzada regular x : [a, b] → R2 es diu simple si no te auto-interseccions, i.e. x(s) 6= x(s′) si s 6= s′. Una corba es diu tancada simple si es tancada ix(s) = x(s′) si i nomes si s = s′ o s, s′ = a, b.
Teorema 2.1 (Umlaufsatz). El nombre de rotacio d’una corba tancada simple es ±1.
Exercici 2.2.1. Demostreu el umlaufsatz. Per aixo cerqueu referencies bibliografiques i porteu-les a classe, per exemple la pagina web http://www.mathematik.com/Hopf/index.html conteuna bona il.lustracio d’una demostracio. Tambe us recomanen el llibre de Do Carmo.
Exercici 2.2.2. Sigui x(s) una corba tancada simple de longitud L parametritzada per l’arc ambfuncio de curvatura k(s) > 0. Sigui r < min1/k(s) i xr(s) := x(s) + rn(s), on n(s) = it(s)es el vector normal de x(s). Expresseu la longitud de xr en funcio de L i r.
Definicio. Una corba tancada simple x : [a, b] → R2 es diu convexa si per tot punt P = x(s)la corba esta continguda en un dels dos semiplans determinats per la recta tangent en P .
Teorema 2.2. Una corba tancada simple es convexa si i nomes si la seva curvatura no canviade signe.
Exercici 2.2.3. Proveu el teorema 2.2. Per aixo cerqueu referencies bibliografiques i porteu-lesa classe per analitzar-les.
§2.3 Teorema dels quatre vertexs.
Definicio. Un punt x(s) d’una corba regular plana s’anomena vertex si k′(s) = 0.
Exercici 2.3.1. Proveu que els vertexs d’una corba regular x(s) parametritzada per l’arc escorresponen amb els punts singulars (i.e. y′(s) = 0) de la parametritzacio y(s) = x(s) +
1k(s)n(s) de la seva evoluta (i.e. el lloc geometric dels seus centres de curvatura). De fet, escert que els vertexs son punts singulars de qualsevol parametritzacio de l’evoluta pero aixo noho demostrarem.
9

Exercici 2.3.2. Trobeu una parametritzacio de la lemniscata de Bernoulli C = P ∈ R2 :4d(A,P )d(B,P ) = d(A,B)2, on A 6= B son dos punts donats del pla. Feu una representaciografica aproximada de la corba C, proveu que te exactament dos vertexs i determineu el seunombre de rotacio.
Teorema 2.3 (Teorema dels quatre vertexs). Una corba tancada simple i convexa te almenysquatre vertexs.
Observacio: De fet, podem ser mes precisos i afirmar que els quatre vertexs son extremsrelatius de la curvatura. El nombre de vertexs pot ser exactament quatre, com en el cas d’unael.lipse.
Figura 2.1: Evoluta de l’el.lipse
Exercici 2.3.3. La funcio k(s) = 1 + 12 sin(s) es 2π-periodica i positiva. Considerem una corba
plana x(s), s ∈ [0, 2π], parametritzada per l’arc amb curvatura k(s). La curvatura total dex(s) es doncs 2π. Si x(s) fos tancada aleshores seria tancada simple i convexa, i pel teoremaanterior hauria de tenir quatre vertexs, la qual cosa no es certa perque k(s) nomes te dos puntscrıtics a l’interval [0, 2π]. Utilitzant maple o 3D-XplorMath feu una representacio grafica dex(s) i porteu-la a classe.
10

§2.4 Funcio de suport.
Definicio. Fixem com origen de coordenades un punt O a l’interior d’una corba C tancada,simple i convexa. Per cada ϕ ∈ [0, 2π) existeix un unic pO(ϕ) de manera que la recta cosϕ ·x + sinϕ · y = pO(ϕ) es tangent a C (es la recta de suport en direccio ϕ). La funcio pO :[0, 2π]→ (0,+∞) s’anomena funcio de suport de C.
Exercici 2.4.1. Proveu que si O′ = O + (a, b) aleshores pO′(ϕ) = pO(ϕ) − a cosϕ − b sinϕ.Quines son les funcions de suport de les circumferencies?
Exercici 2.4.2. Proveu que podem parametritzar C a partir de pO(ϕ) mitjancant
xO(ϕ) = O + (pO(ϕ) cosϕ− p′O(ϕ) sinϕ, pO(ϕ) sinϕ+ p′O(ϕ) cosϕ).
Proveu que el radi de curvatura i el centre de curvatura de C en el punt xO(ϕ) son pO(ϕ) +p′′O(ϕ) i O+ (−p′O(ϕ) sinϕ− p′′O(ϕ) cosϕ, p′O(ϕ) cosϕ− p′′O(ϕ) sinϕ) respectivament. Observeuque la funcio de suport de l’evolvent de C es p′O(ϕ+ π
2 ).
Exercici 2.4.3. Si C es una corba plana tancada simple i convexa amb funcio de suport p(ϕ)aleshores
L(C) =
∫ 2π
0(p(ϕ) + p′′(ϕ)) dϕ i A(C) =
1
2
∫ 2π
0p(ϕ)(p(ϕ) + p′′(ϕ)) dϕ.
Exercici 2.4.4. Proveu que si p(ϕ) es una funcio diferenciable 2π-periodica aleshores l’equaciop′(ϕ) + p′′′(ϕ) te al menys quatre solucions diferents a l’interval [0, 2π]. Indicacio: si q(ϕ) esuna altre funcio diferenciable 2π-periodica aleshores
∫ 2π0 (p′ + p′′′)q = −
∫ 2π0 (q′ + q′′′)p.
Existeixen moltes proves diferents del teorema dels quatre vertexs, veure per exemple el llibredel Do Carmo i la Lecture 10 del llibre Mathematical Omnibus que podeu consultar on-line:
http://books.google.com/
books?id=bomkJMq2H9sC&printsec=frontcover&dq=mathematical+omnibus&hl=es
Exercici 2.4.5. Doneu una prova del teorema dels quatre vertexs.
§2.5 Notes finals. Per acabar, recollim algunes possibles ampliacions pels alumnes quepuguin estar interessats en aquest tema:
- El teorema tambe es valid per corbes no convexes, cf. S.S. Chern, Curves and surfaces inEuclidean space, Studies in global Geometry and Analysis, 1967.
- El recıproc del teorema dels quatre vertexs tambe es valid quan la curvatura es estrictamentpositiva (H. Gluck, L’Enseignement Mathematique, 1971) i quan el valor de dos dels mınimslocals es mes petit que el valor de dos maxims locals (B.E.J. Dahlberg, Proceedings of theAmerican Mathemetical Society, 2005).
- Existeix una generalitzacio del teorema dels 4 vertexs a corbes contingudes en superfıcies decurvatura constant (S.B. Jackson, American Journal of Mathematics, 1945). En el cas desuperfıcies de curvatura no constant, petits cercles centrats en punts regulars de la curvaturade Gauss tenen nomes dos vertexs geodesics.
11

3 Teoria global de corbes planes II
En aquest seminari veurem dos dels teoremes principals de l’anomenada ‘geometria integral’,la formula de Cauchy-Crofton i la formula cinematica de Blaschke. Com a consequenciadeduirem la desigualtat isoperimetrica en el pla.Si trobeu el seminari massa llarg podeu parar un cop fet l’apartat 3.9.
§3.1 Paradoxa de Bertrand.Considerem un cercle de radi r en el pla sobre el qual llancem rectes a l’atzar. Volem calcularla probabilitat de que la longitud de la corda obtinguda sigui mes gran que la longitud deltriangle equilater inscrit en el cercle.
Exercici 3.1.1. Proveu que la longitud del costat del triangle equilater inscrit en una circum-ferencia de radi r es
√3r.
Estudiarem aquest problema des de tres punts de vista diferents.
§3.2 Primera solucio: fixant els extrems. Per donar una corda fixem els punts θ1 i θ2 de lacircumferencia per on passa la corda. Suposem que les cordes son orientades, en aquest casla corda (θ1, θ2) es diferent de la corda (θ2, θ1); en el moment de calcular probabilitats tantels casos possibles com els favorables quedaran afectats per un factor 2 i aixo no afectara alcalcul la probabilitat.
Exercici 3.2.1. Proveu que la probabilitat de que una corda tingui longitud mes gran que√
3res igual a 1/3 (figura 3.1)).
θ1
θ2
C D
Figura 3.1: Coordenades (θ1, θ2), p = 1/3.
§3.3 Segona solucio: fixant el punt mitja. Un altra manera de determinar una corda esfixant el seu punt mitja (x, y).
Exercici 3.3.1. Veieu que una corda te longitud superior a√
3r si i nomes si√x2 + y2 < r/2.
Proveu que la probabilitat de que una corda tingui longitud mes gran que√
3r es igual a 1/4(figura 3.2)).
§3.4 Tercera solucio: fixant la distancia a l’origen. Podem determinar una recta del pladonant la seva distancia p a l’origen i donant l’angle que forma el vector normal a la rectaque s’allunya de l’origen. Per cada p > 0 i cada θ ∈ [0, 2π) el parell (p, θ) respresenta la rectad’equacio x cos θ + y sin θ = p.
12

(x, y)r/2
Figura 3.2: Coordenades (x, y), p = 1/4.
Nota: Quan p = 0 els angles θ i θ + πmod 2π determinen la mateixa recta per l’origen.
Exercici 3.4.1. Proveu que per una direccio θ fixada les cordes de longitud mes gran que√
3rson aquelles per les quals p < r/2. Deduıu que la probabilitat de que una corda tingui longitudmes gran que
√3r es igual a 1/2.
pθ
Figura 3.3: Coordenades (p, θ), p = 1/2.
§3.5 Que passa? Hem resolt el problema de tres formes diferents. Quina es la solucio bona?Fem la prova (teorica) de llencar 1000 rectes a l’atzar que tallin un cercle. Ho fem triant elsparametres (θ1, θ2) de manera uniforme en el seu domini i el mateix quan triem (x, y) i quantriem (p, θ). Podeu veure el resultat a la figura 3.4.
Exercici 3.5.1. Quina simulacio fa que les cordes estiguin distribuıdes mes uniformement?
Aparentment quan fem servir (p, θ) per parametritzar les rectes la distribucio es mes uniforme.Observem que el que s’ha fet per calcular les probabilitats ha estat calcular
p =
∫Casos favorables dL∫Casos possibles dL
(3.1)
on dL es dθ1 dθ2, dx dy y dp dθ en cada un dels casos.
La resposta que sembla mes adequada es la que ens dona dp dθ perque aquesta ‘mesura’ esinvariant per moviments rıgids. Veiem aixo a l’apartat seguent.
13
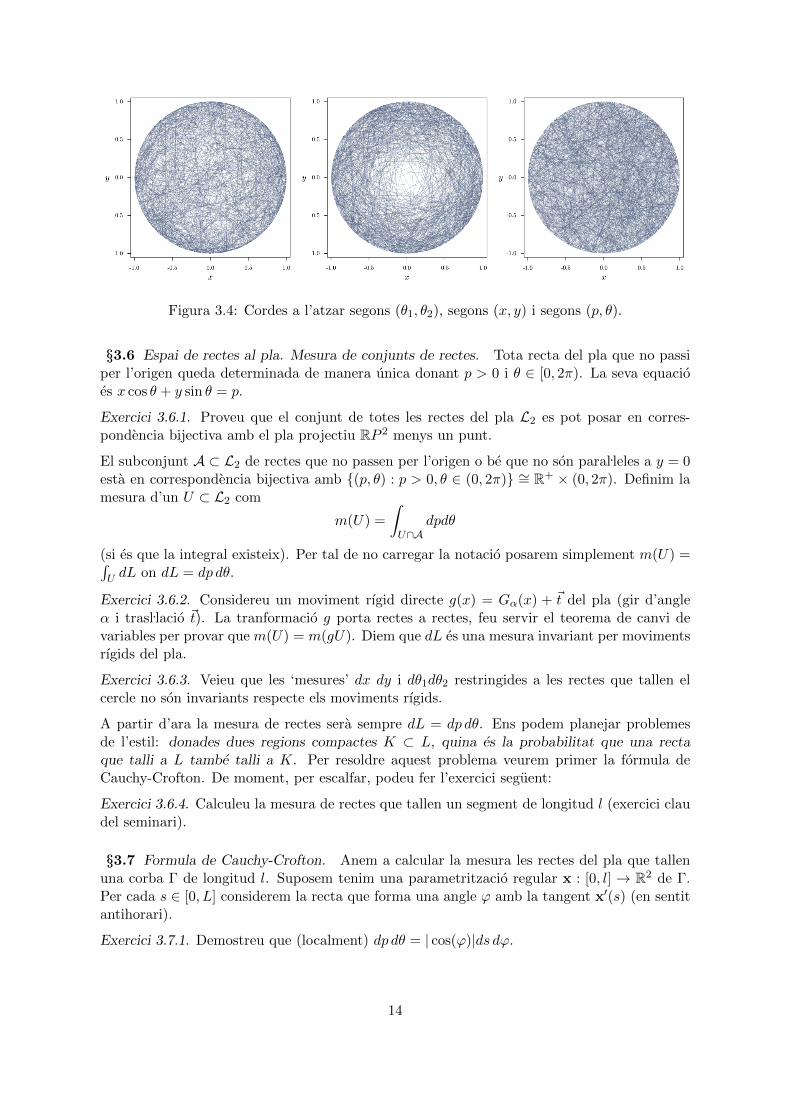
Figura 3.4: Cordes a l’atzar segons (θ1, θ2), segons (x, y) i segons (p, θ).
§3.6 Espai de rectes al pla. Mesura de conjunts de rectes. Tota recta del pla que no passiper l’origen queda determinada de manera unica donant p > 0 i θ ∈ [0, 2π). La seva equacioes x cos θ + y sin θ = p.
Exercici 3.6.1. Proveu que el conjunt de totes les rectes del pla L2 es pot posar en corres-pondencia bijectiva amb el pla projectiu RP 2 menys un punt.
El subconjunt A ⊂ L2 de rectes que no passen per l’origen o be que no son paral.leles a y = 0esta en correspondencia bijectiva amb (p, θ) : p > 0, θ ∈ (0, 2π) ∼= R+ × (0, 2π). Definim lamesura d’un U ⊂ L2 com
m(U) =
∫U∩A
dpdθ
(si es que la integral existeix). Per tal de no carregar la notacio posarem simplement m(U) =∫U dL on dL = dp dθ.
Exercici 3.6.2. Considereu un moviment rıgid directe g(x) = Gα(x) + ~t del pla (gir d’angleα i trasl.lacio ~t). La tranformacio g porta rectes a rectes, feu servir el teorema de canvi devariables per provar que m(U) = m(gU). Diem que dL es una mesura invariant per movimentsrıgids del pla.
Exercici 3.6.3. Veieu que les ‘mesures’ dx dy i dθ1dθ2 restringides a les rectes que tallen elcercle no son invariants respecte els moviments rıgids.
A partir d’ara la mesura de rectes sera sempre dL = dp dθ. Ens podem planejar problemesde l’estil: donades dues regions compactes K ⊂ L, quina es la probabilitat que una rectaque talli a L tambe talli a K. Per resoldre aquest problema veurem primer la formula deCauchy-Crofton. De moment, per escalfar, podeu fer l’exercici seguent:
Exercici 3.6.4. Calculeu la mesura de rectes que tallen un segment de longitud l (exercici claudel seminari).
§3.7 Formula de Cauchy-Crofton. Anem a calcular la mesura les rectes del pla que tallenuna corba Γ de longitud l. Suposem tenim una parametritzacio regular x : [0, l] → R2 de Γ.Per cada s ∈ [0, L] considerem la recta que forma una angle ϕ amb la tangent x′(s) (en sentitantihorari).
Exercici 3.7.1. Demostreu que (localment) dp dθ = | cos(ϕ)|ds dϕ.
14

Exercici 3.7.2. Donada L ∈ L2 denotem per n(L ∩ Γ) el nombre de punts d’interseccio de Lamb la corba Γ. Proveu la formula de Cauchy-Crofton.∫
L2n(L ∩ Γ)dL = 2l.
Exercici 3.7.3. Proveu que si K ⊂ K ′ son regions convexes del pla amb fronteres formades percorbes regulars tancades de longituds lK i lK′ llavors lK ≤ lK′ (per continuıtat aixo es certtambe per corbes convexes qualsevol).
Exercici 3.7.4. Quina es la probabilitat que una recta que talli a K ′ tambe talli a K?
§3.8 Mesura cinematica. Ja sabem mesurar els objectes mes elementals del pla: punts irectes (ho fem integrant dP = dx dy i dL = dp dθ respectivament). Ara anem a mesurarmoviments rıgids. Per exemple, ens agradaria mesurar els moviments rıgids g que fan que unconvex gK ′ talli a un altre K. Posem a K ′ un origen O′ i en ell uns eixos coordenats x′, y′
definits per una base ortonormal directa v1, v2. Donar un moviment rıgid g equival a donarO′; v1, v2 i per tant equival a donar gK ′.
Si O′ = (x, y) i v1 = (cosϕ, sinϕ), la mesura d’un conjunt U de moviments vindra donada per
m(U) =
∫Uf(ϕ, x, y) dϕ dx dy.
Exercici 3.8.1. Proveu que si m(gU) = m(U) per qualsevol moviment rıgid g (directe) llavorsf ha de ser constant.
Triem com a element de mesura invariant de moviments dg = dϕ dx dy, es l’anomenada mesuracinematica.
Exercici 3.8.2. Proveu que m(g : K ∩ gK ′ 6= ∅) = m(g : gK ∩K ′ 6= ∅). Dit en paraules:es el mateix moure K que moure K ′.
Exercici 3.8.3. Proveu que si h es un moviment rıgid fixat llavors m(g : K ∩ ghK ′ 6= ∅) =m(g : hK ∩ gK ′ 6= ∅). Es a dir, no importen les posicions inicials de K o K ′.
Exercici 3.8.4. Demostreu que m(g : g(p) ∈ K) = 2πA on p es un punt, K es un convex i Aes l’area de A. Es a dir, la mesura de moviments que fan que un punt caigui en un convex Kes 2π per l’area del convex (de fet la convexitat no es necessaria).
§3.9 Funcio suport (de nou). Al seminari 2 es va definir la funcio suport p(θ) d’una corbatancada convexa. Si K es una regio convexa (compacta) de R2 i x ∈ R2 definim
h(x) = maxy∈K〈x, y〉.
Exercici 3.9.1. Proveu que h restringida a S1 es la funcio suport p(θ) de la corba frontera.
Exercici 3.9.2. Doneu la funcio suport d’un triangle equilater (trieu l’origen que vulgueu).
Ja sabem que si la funcio suport p(θ) es diferenciable tenim la parametritzacio
x = p cos θ − p′ sin θy = p sin θ + p′ cos θ
.
15

O x
y
H
P
p′
p
θ
Figura 3.5: Funcio suport p
Exercici 3.9.3. Demostreu que l’element d’arc ds de la corba amb funcio suport p es igual a|p+ p′′|dθ. Proveu que K es convex si nomes si p+ p′′ no canvia de signe (p+ p′′ es el radi decurvatura en el punt de parametre θ).
Exercici 3.9.4. Proveu que el perımetre de K es L =∫S1 pdθ i que l’area es A = 1
2
∫ L0 pds =
12
∫ L0 p(p+ p′′)dθ (cas convex).
Si K es convex compacte, el conjunt paral.lel Kr a distancia r es el conjunt de punts a distanciamenor o igual que r de K.
Exercici 3.9.5. Proveu que la funcio suport de Kr es p(θ) + r. Deduıu que l’area Ar de Kr es
Ar = A+ Lr + πr2.
Observacio: si K es unio finita de convexos (policonvex) aleshores per r prou petit es te
Ar = A+ Lr + χ(K)πr2
on χ(K) es la caracterıstica d’Euler -Poincare de K.
§3.10 Suma de Minkowski. Area mixta. Donats dos convexos compactes K,K ′ la suma deMinkowski es el conjunt
K +K ′ = x+ y : x ∈ K, y ∈ K ′.
Per exemple, si Br es el disc de radi r aleshores K +Br = Kr el convex parl.lel a distancia r.
Exercici 3.10.1. Proveu que la suma de Minkowski de convexos es un convex.
Exercici 3.10.2. Siguin K1 i K2 convexos (a partir d’ara sempre compactes) amb funcions desuport p1, p2 respecte un mateix punt. Proveu que la funcio de suport de K1 +K2 es p1 + p2.
De vegades es convenient pensar en K1 i K2 amb funcions suport p1, p2 respecte punts O1, O2
diferents i considerar la funcio de suport p = p1 + p2 respecte qualsevol punt. Aquesta funciop defineix un convex K (que te a veure K amb el convex K1 + K2?). Definim l’area mixtaA12 de Minkowski de K1 i K2 a partir de la relacio
A = A1 +A2 + 2A12.
16
Exercici 3.10.3. Proveu que
A12 =1
2
∫ 2π
0(p1p2 − p′1p′2)dθ =
1
2
∫∂K2
p1ds2 =1
2
∫∂K1
p2ds1
on dsi son els elements d’arc dels contorns.
Exercici 3.10.4. L’area mixta no depen del origens O1, O2.
Exercici 3.10.5. L’area mixta es invariant respecte traslacions del convexos K1,K2.
L’area mixta sı que depen de les rotacions dels convexos. Si girem K1 un angle α al voltantde O1 tenim que la nova funcio suport es p1(θ − α).
Exercici 3.10.6. Proveu aquesta darrera afirmacio i veieu que si A12(α) = 12
∫∂K2
p1(θ−α)ds2.llavors ∫ 2π
0A12(α)dα =
1
2L1L2.
§3.11 Mesura dels moviments que fan que dos convexos es tallin. Considerem dos convexosK0 i K1. Volem calcular
∫K0∩gK1 6=∅ dg, la mesura de moviments rıgids g tals que K0∩gK1 6= ∅.
Posem en un punt P1 de K1 uns eixos (veieu la figura 3.6) que es mouen solidariament amb elconvex. Moure K1 equival a traslladar P1 i fer girar els eixos. Per una angle φ fixat dels eixosmovem P1 a una posicio de tangencia amb la frontera de K0. Sigui p0 la funcio de suport deK0 respecte P0 i p1 la funcio de suport de K1 girat en un angle φ i respecte P2.
Exercici 3.11.1. Les translacions que fan que K1 talli a K0 son les que porten P2 al convexque te funcio de suport p0(θ) + p1(θ + π) (veieu dibuix). Aleshores proveu que∫
K0∩gK1 6=∅dg =
∫ 2π
0
∫P1∈K
dP1 dφ =
∫ 2π
0Adφ.
Exercici 3.11.2. Proveu, fent servir la integral de l’area mixta vista en un exercici anterior,que ∫
K0∩gK1 6=∅dg = 2π(A0 +A1) +
∫ 2π
02A01dφ = 2π(A0 +A1) + L0L1.
Hem demostrat que la mesura de moviments que fan que dos convexos es tallin es igual a
2π(A0 +A1) + L0L1.
§3.12 Formules de Poincare i de Blaschke. Aquesta darrera formula es pot generalitzar.Diem que K es un conjunt policonvex si es unio finita de convexos (compactes). Per exempleuna lınia trencada es un policonvex. Tenim la formula cinematica de Blaschke:∫
Gχ(D0 ∩ gD1)dg = 2π(χ0F1 + χ1F0) + L0L1.
on Di son policonvexos del pla (de fet dominis), χ representa la caracterıstica d’Euler-Poincarei G es el grup de moviments rıgids directes. Podeu trobar una demostracio d’aquest teoremaals llibres de Santalo que es donen a la bibliografia.
Exercici 3.12.1. Siguin convexos K ⊂ K ′, quina es la probabilitat que un convex aleatori quetalli a K ′ tambe talli a K.
17

P0
P1
θ
φ
x
y
x′y′
K0
K1
p1(θ + π)
p0(θ)
Figura 3.6: dg = dP1 dφ
Exercici 3.12.2. Siguin Γ i Γ′ corbes del pla. Les ‘inflem’ una mica considerant els conjuntsparal.lels a distancia r (r molt petit). Denotem per Dr i D′r els dominis aixı obtinguts.Apliqueu la formula de Blaschke a Dr i D′r, feu tendir r a zero i proveu la formula de Poincare∫
Γ∩gΓ′ 6=∅n(Γ ∩ gΓ′)dg = 4ll′
on l i l′ son les longituds de les corbes.
Observacio: Les formules de Crofton i de Blaschke son el punt de partida del que s’anomenaGeometria Integral. En aquesta branca de la geometria s’estudien mesures invariants d’objec-tes geometrics i es fan servir per descriure la geometria de l’espai que els envolta. Tambe tenombroses aplicacions en l’estudi i tractament d’imatges, el que s’anomena estereologia. Perexemple la formula de Crofton es pot utilitzar per estimar longituds simplement comptantpunts d’interseccio d’una xarxa amb una corba.
§3.13 Desigualtat isoperimetrica. Un problema geometric classic es el de determinar la regioque te area mes gran per un perımetre fixat (vegeu la bibliografia). L’intuicio ens proposa elcercle com solucio d’aquest problema. Per un cercle tenim que
L2 = 4πA.
Demostrarem que L2 − 4πA ≥ 0 per qualsevol regio del pla.
Considerem dos convexos compactes K0 i K1 tals que K1 = hK0 on h es un moviment rıgid(diem que K0 i K1 son congruents). Suposem-los d’area A i perımetre L. Denotem per mi lamesura dels moviments rıgids que fan que les fronteres es tallin en i punts. Excepte per unconjunt de mesura nul.la el nombre i sempre sera parell.
18

Exercici 3.13.1. Proveu a partir de la formula de Blaschke que
4πA+ L2 = m2 +m4 +m6 + · · ·
Exercici 3.13.2. Proveu a partir de la formula de Poincare que
4L2 = 2m2 + 4m4 + 6m6 + · · ·
Exercici 3.13.3. Deduıu dels dos exercicis anteriors la desigualtat isoperimetrica
L2 − 4πA ≥ 0.
Per tenir igualtat cal que el nombre de punts de ∂K0 ∩ gK1 sigui 0 o 2 (excepte en un conjuntde moviments de mesura nul.la).
Exercici 3.13.4. Proveu que si m2i = 0 per tot i > 1 aleshores la corba frontera es unacircumferencia.
Exercici 3.13.5. (problema obert) enunciar i donar una demostracio de la desigualtat isope-rimetrica a l’espai de tres dimensions fent servir metodes de la geometria integral.
Exercici 3.13.6. Trobeu en algun llibre la desigualtat isoperimetrica per regions de Rn.
§3.14 Referencies.
– http://en.wikipedia.org/wiki/Bertrand%27s_paradox_(probability)
– Blasjo. The Isoperimetric Problem. The American Mathematical Monthly (2005) vol.112 (6)
– Osserman. The isoperimetric inequality. Bull. Amer. Math. Soc. (1978) vol. 84 (6)pp. 1182-1238
– Rey Pastor et al. Geometrıa integral. Espasa Calpe (1951) pp. 281
– Santalo. Integral geometry and geometric probability. Lecture Notes in Math. (2004)pp. xx+404
19

4 Corbes a l’espai amb maple
§4.1 Calcul de la curvatura, torsio i triedre de Frenet d’una corba. Comencem carregantels paquets que necessitem:
restart:with(Student[VectorCalculus]):with(plots):with(plottools):
Definim una corba a l’espai, per exemple l’helix cilındrica
f:=<cos(t),sin(t),t/2>:
i calculem la seva curvatura i torsio
simplify(Curvature(f));simplify(Torsion(f));
Hem de remarcar pero que el signe de la torsio que utilitza el maple es l’oposat al que hemintroduıt nosaltres a classe.
Tambe podem calcular el triedre de Frenet en cada punt fent
TNBFrame(f);
§4.2 Visualitzacio del triedre de Frenet d’una corba a l’espai. Considerem l’helix cilındricaanterior i representem el cilindre que la conte fent
cilindre:=plot3d([(cos(u),sin(u),v)],u=0..2*Pi,v=-Pi..2*Pi,
style=patchnogrid,transparency=0.7):
A continuacio representem graficament el cilindre, la corba i el seu triedre de Frenet animatmitjancant
display(cilindre,TNBFrame(f, output=animation, scaling=constrained,
range=-2*Pi..4*Pi,frames=20, curveoptions=[numpoints=100,color=yellow],
tangentoptions=[color=green],normaloptions=[color=red],binormaloptions=[color=blue]));
Exercici 4.2.1. Feu una representacio analoga pel nus toric
f:=<(2+cos(3*t))*cos(2*t),(2+cos(3*t))*sin(2*t),sin(3*t)>
Feu tambe una representacio grafica de les seves funcions curvatura i torsio.
§4.3 Teorema fonamental de la teoria local de corbes planes. Considerem amb el maple essistema d’equacions diferencials ordinaries
x′(s) = t(s), t′(s) = κ(s)n(s), n′(s) = −κ(s)t(s)
amb condicions inicials
x(0) = (0, 0), t(0) = (1, 0), n(0) = (0, 1).
20
eq:=seq(diff(x[i](s),s)=t[i](s),i=1..2),
seq(diff(t[i](s),s)=kappa(s)*n[i](s),i=1..2),
seq(diff(n[i](s),s)=-kappa(s)*t[i](s),i=1..2);
ci:=x[1](0)=0,x[2](0)=0,t[1](0)=1,t[2](0)=0,n[1](0)=0,n[2](0)=1;
incong:=seq(x[i](s),i=1..2),seq(t[i](s),i=1..2),seq(n[i](s),i=1..2);
A partir d’una funcio curvatura κ(s) concreta podem integrar numericament i representargraficament el resultat:
kappa:=s->1;
sol:=dsolve(eq,ci,incong,numeric,range=0..2*Pi);
corba:=odeplot(sol,[seq(x[i](s),i=1..2)],s=0..2*Pi,color=yellow,thickness=3,
scaling=constrained):
biedre:=proc(tt)
display(arrow(subs(sol(tt),[seq(x[i](s),i=1..2)]),
vector(subs(sol(tt),[seq(t[i](s),i=1..2)])),0.04,0.15,0.2,color=green),
arrow(subs(sol(tt),[seq(x[i](s),i=1..2)]),
vector(subs(sol(tt),[seq(n[i](s),i=1..2)])),0.04,0.15,0.2,color=red)) end:
animate(biedre, [tt],tt=0..2*Pi,scaling=constrained,background=corba);
Exercici 4.3.1. Repetiu tot el procediment anterior utilitzant ara com a condicions inicials unabase no ortonormal
ci:=x[1](0)=0,x[2](0)=0,t[1](0)=1,t[2](0)=0,n[1](0)=2,n[2](0)=1;
i veieu que no es la mateixa corba (per que?).
§4.4 Teorema fonamental de la teoria local de corbes a l’espai. Procedim de la mateixamanera que per corbes planes, considerant les equacions de Frenet
x′(s) = t(s), t′(s) = κ(s)n(s), n′(s) = −κ(s)t(s)− τ(s)b(s), b′(s) = τ(s)n(s).
Exercici 4.4.1. Definiu una funcio triedre analoga a la funcio biedre que hem considerat percorbes planes. Integreu numericament i representeu graficament la corba (i el seu triedre deFrenet) que te curvatura i torsio iguals a 1 amb condicions inicials
x(0) = (0, 0, 0), t(0) = (1, 0, 0), n(0) = (0, 1, 0), b(0) = (0, 0, 1).
Feu el mateix amb les condicions inicials que no formen base
x(0) = (0, 0, 0), t(0) = (1, 0, 0), n(0) = (0, 1, 0), b(0) = (1, 0, 0).
Exercici 4.4.2. Feu una representacio grafica de les funcions
kappa:=t->1.5+exp(-((t-12)/10)^2)+10*exp(-(t/3)^2)+exp(-((t+3)/10)^2):
tau:=t->5*exp(-(t-10)^2)+10*exp(-t^2)+5*exp(-(t+10)^2):
a l’interval [−15, 8]. Integreu numericament i representeu graficament una corba (i el seutriedre de Frenet) que tingui curvatura kappa i torsio tau per aquest rang de valors.
21

§4.5 Esferes osculadores. Per cada punt x(0) d’una corba a l’espai existeix una esferaque millor aproxima a la corba i que s’anomena esfera osculadora. Intentarem determinar-la utilitzat la mateixa tecnica que varem usar en el cas de corbes planes per determinar lacircumferencia osculadora, es a dir, considerant el lımit d’esferes secants que passen per trespunts x(ε1), x(ε2), x(ε3) propers al punt x(0). El seu centre (que depen de εi, i = 1, 2, 3)es troba al punt d’interseccio dels tres plans (i = 1, 2, 3) que passen pel punt mig de x(εi)i x(0) i que son perpendiculars al vector x(εi) − x(0). Finalment, passem al lımit quan(ε1, ε2, ε3)→ (0, 0, 0).
restart:
x:=t->x[0]+x[1]*t+x[2]*t^2/2+x[3]*t^3/6:
y:=t->y[0]+y[1]*t+y[2]*t^2/2+y[3]*t^3/6:
z:=t->z[0]+z[1]*t+z[2]*t^2/2+z[3]*t^3/6:
eq:=epsilon->(x(epsilon)-x(0))*(xx-(x(epsilon)+x(0))/2)+
(y(epsilon)-y(0))*(yy-(y(epsilon)+y(0))/2)+
(z(epsilon)-z(0))*(zz-(z(epsilon)+z(0))/2)=0;
sol:=solve(seq(eq(epsilon[i]),i=1..3),xx,yy,zz):
cx:=limit(limit(limit(subs(sol,xx),epsilon[1]=0),epsilon[2]=0),epsilon[3]=0);
cy:=limit(limit(limit(subs(sol,yy),epsilon[1]=0),epsilon[2]=0),epsilon[3]=0);
cz:=limit(limit(limit(subs(sol,zz),epsilon[1]=0),epsilon[2]=0),epsilon[3]=0);
radi:=simplify((cx-x[0])^2+(cy-y[0])^2+(cz-z[0])^2);
Com que el resultat d’aquest primer intent no es satisfactori hem de filar mes prim. La idea esutilitzar la forma local de x(s) parametritzada per l’arc i en coordenades adaptades al triedrede Frenet de la corba en el punt corresponent al parametre arc s = 0:
x(s) = x(s)t(0) + y(s)n(0) + z(s)b(0).
Per aixo trobarem l’expressio de x(0), x′(0), x′′(0) i x′′′(0) en funcio de t(0), n(0) i b(0):
frenet:=[diff(X(s),s)=T(s),diff(T(s),s)=kappa(s)*N(s),
diff(N(s),s)=-kappa(s)*T(s)-tau(s)*B(s),diff(B(s),s)=tau(s)*N(s)]:
g:=X->applyrule(frenet,expand(X)):
collect((g@@i)(diff(X(s),s$i)),[T(s),N(s),B(s)])$i=0..3;
Aixı obtenim el mateix resultat que havıem vist a classe de teoria:
x:=s->s-kappa[0]^2*s^3/6:
y:=s->kappa[0]*s^2/2+kappa[1]*s^3/6:
z:=s->-kappa[0]*tau[0]*s^3/6:
on kappa[0], kappa[1] i tau[0] son els valors de la curvatura, la derivada de la curvatura i latorsio en el punt de parametre s = 0. Calculem les coordenades del centre de la esfera que passapels punts corresponents als parametres s=0, s=epsilon[1], s=epsilon[2] i s=epsilon[3]i passem al lımit quan εi → 0 per obtenir les coordenades del centre de la esfera osculatriu:
sol:=solve(seq(eq(epsilon[i]),i=1..3),xx,yy,zz):
cx:=limit(limit(limit(subs(sol,xx),epsilon[1]=0),epsilon[2]=0),epsilon[3]=0);
cy:=limit(limit(limit(subs(sol,yy),epsilon[1]=0),epsilon[2]=0),epsilon[3]=0);
cz:=limit(limit(limit(subs(sol,zz),epsilon[1]=0),epsilon[2]=0),epsilon[3]=0);
radi:=sqrt(cx^2+cy^2+cz^2);
22

Tambe podem considerar una aproximacio diferent, utilitzant la teoria del contacte. Mesconcretament, es tracta de trobar els valors de les coordenades del centre c=(cx,cy,cz) iel radi r per que la funcio f:=s->(x(s)-cx)^2+(y(s)-cy)^2+(z(s)-cz)^2-r^2 sigui el mesplana possible al voltant de s = 0. Com tenim quatre parametres lliures, podem imposar lesquatre condicions f(0) = 0, f ′(0) = 0, f ′′(0) = 0 i f ′′′(0) = 0:
x:=s->s-kappa[0]^2*s^3/6+O(s^4):
y:=s->kappa[0]*s^2/2+kappa[1]*s^3/6+O(s^4):
z:=s->-kappa[0]*tau[0]*s^3/6+O(s^4):
cx:=’cx’:cy:=’cy’:cz:=’cz’:radi:=’radi’:
f:=series((x(s)-cx)^2+(y(s)-cy)^2+(z(s)-cz)^2-radi^2,s=0,4);
sol:=solve([coeffs(convert(f,’polynom’),s)],[cx,cy,cz,radi]);
Exercici 4.5.1. En un punt generic, travessa la corba la seva esfera osculatriu?
§4.6 Representacio grafica de les esferes osculatrius d’una corba. Tornem a la situacio inicial
restart:with(Student[VectorCalculus]):with(plots):with(plottools):
i considerem la corba (nus toric)
f:=<(4+cos(5*t))*cos(2*t), (4+cos(5*t))*sin(2*t), sin(5*t)>:
a la que calculem les seves funcions curvatura i torsio que representem graficament perassegurar-nos que no s’anul.len mai:
kappa:=simplify(Curvature(f)):tau:=-simplify(Torsion(f)):
plot([kappa,tau],t=0..2*Pi,color=[red,blue]);
Considerem tambe el seu triedre de Frenet i el coeficient λ = κ′
κ2τ. Aquı la prima denota
derivada respecte del parametre arc. Com que la parametritzacio de la que disposem no ho eshem d’aplicar la regla de la cadena: d
ds = dtds
ddt = 1
dsdt
ddt = 1
‖f ′(t)‖ddt .
F:=[TNBFrame(f)]:
lambda:=simplify(kappa/sqrt(DotProduct(diff(f,t),diff(f,t)))/(kappa^2*tau)):
A continuacio definim el seguent procediment per representar graficament les esferes oscula-trius d’una corba:
esfosc:=(f,F,kappa,tau,lambda)->proc(tt) local c,r:
c:=simplify(subs(t=tt,f+1/kappa*F[2]+lambda*F[3]));
r:=simplify(subs(t=tt,sqrt(1/kappa^2+lambda^2)));display(
plot3d(subs(t=tt,c+<r*cos(theta)*cos(phi),r*sin(theta)*cos(phi),r*sin(phi)>),
theta=0..2*Pi,phi=-Pi/2..Pi/2,grid=[15,7],color=gold,scaling=constrained,
style=wireframe),arrow((subs(t=tt,f)),subs(t=tt,F[1]),0.1,0.15,0.2,color=green),
arrow((subs(t=tt,f)),subs(t=tt,F[2]),0.1,0.15,0.2,color=red),
arrow((subs(t=tt,f)),subs(t=tt,F[3]),0.1,0.15,0.2,color=blue)) end:
el qual podem utilitzar de manera “animada” fent:
animate(esfosc(f,F,kappa,tau,lambda),[tt],tt=0..2*Pi,background=
spacecurve(f,t=0..2*Pi,numpoints=200),scaling=constrained,frames=80);
23

§4.7 Corbes esferiques.
Exercici 4.7.1. Proveu que una corba es esferica (i.e. esta continguda en una esfera) si i nomessi els centre i els radis de les seves esferes osculatrius son constants.
Exercici 4.7.2. Proveu que si els radis de les esferes osculatrius d’una corba son constants au-tomaticament els seus centre ho son tambe i per tant es tracta d’una corba esferica. Indicacio:
kappa:=’kappa’:tau:=’tau’:frenet:=[diff(X(s),s)=T(s),diff(T(s),s)=kappa(s)*N(s),
diff(N(s),s)=-kappa(s)*T(s)-tau(s)*B(s),diff(B(s),s)=tau(s)*N(s)]:
centre:=X(s)+N(s)/kappa(s)+diff(kappa(s),s)*B(s)/(kappa(s)^2*tau(s));
radi_al_quadrat:=1/kappa(s)^2+diff(kappa(s),s)^2/(kappa(s)^4*tau(s)^2);
collect(applyrule(frenet,expand(diff(centre,s))),[T(s),N(s),B(s)]);
Exercici 4.7.3. Sigui x(s) una corba parametritzada per l’arc. Si x(s) esta continguda enl’esfera unitat x2 + y2 + z2 = 1 proveu que les seves funcions curvatura i torsio verifiquen que
κ(s) =√
1 + k(s)2 i τ(s) =±k′(s)
1 + k(s)2, (4.1)
on k(s) = det(x(s),x′(s),x′′(s)). Interpreteu fısicament la magnitud k(s).
Exercici 4.7.4. Recıprocament, proveu que si la curvatura i la torsio d’una corba x(s) para-metritzada per l’arc a R3 es poden expressar com (4.1) aleshores x(s) esta continguda en unaesfera de radi 1.
Exercici 4.7.5. Descriviu les corbes esferiques amb curvatura i torsio donades per (4.1) ambk(s) = 0 i k(s) = 1.
Exercici 4.7.6. Utilitzeu els procediments anteriors per representar graficament una corbaparametritzada per l’arc amb curvatura i torsio donades per (4.1) amb k(s) = s√
1−s2 . Trobeu
el centre de l’esfera on esta continguda i representeu-la graficament juntament amb la corba.
§4.8 Teorema de Fary-Milnor. En el seminari 2 varem veure que la curvatura total d’unacorba tancada simple del pla de longitud ` prenia sempre el mateix valor∫ `
0κ(s) ds = 2π.
Es facil trobar exemples en els que aixo no es compleix a R3, on la curvatura κ(s) sempre espositiva i no hi ha cap cancel.lacio possible a l’integral anterior. Existeix pero un interessantteorema (provat independentment per Istvan Fary i John Milnor en 1949 i 1950 respectiva-ment) que relaciona la curvatura total d’una corba tancada a l’espai amb el fet de descriure unnus no trivial i que concreta l’implicacio: Topologia complicada =⇒ Geometria complicada.
Teorema 4.1 (Fary-Milnor). Si Γ ⊂ R3 es una corba tancada que descriu un nus no trivialaleshores la seva curvatura total
∫Γ κ ds es mes gran que 4π.
Podem il.lustrar aquest teorema amb el calcul de la curvatura total d’alguns nusos torics
f:=(n,m)-><(2+cos(n*t))*cos(m*t),(2+cos(n*t))*sin(m*t),sin(n*t)>:
fent variar el parametre t entre 0 i 2πgcd(m,n) . Es pot comprovar que un nus toric de tipus (m,n)
es trivial si i nomes si mgcd(m,n) = 1 o n
gcd(m,n) = 1.
Exercici 4.8.1. Calculeu la curvatura total dels nusos torics amb n,m ∈ 1, 2, 3, 4 i comproveuque es compleix el teorema de Fary-Milnor.
24
5 Sessio de problemes de corbes a l’espai
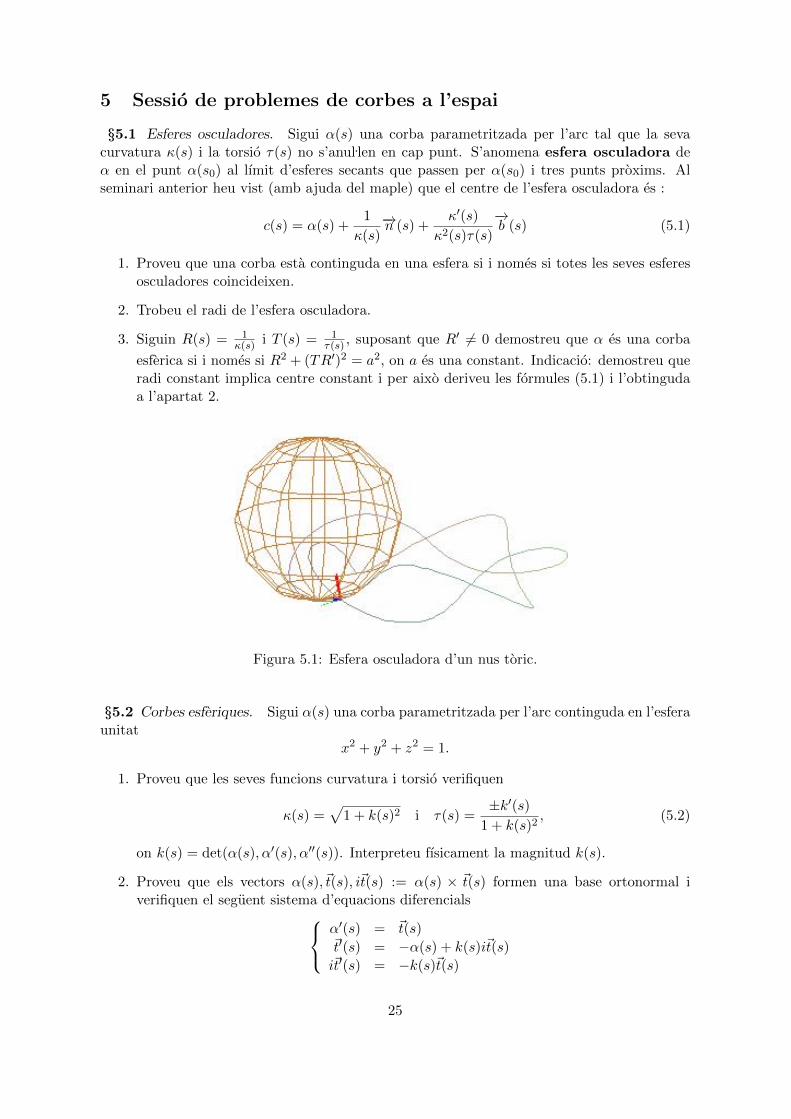
§5.1 Esferes osculadores. Sigui α(s) una corba parametritzada per l’arc tal que la sevacurvatura κ(s) i la torsio τ(s) no s’anul.len en cap punt. S’anomena esfera osculadora deα en el punt α(s0) al lımit d’esferes secants que passen per α(s0) i tres punts proxims. Alseminari anterior heu vist (amb ajuda del maple) que el centre de l’esfera osculadora es :
c(s) = α(s) +1
κ(s)−→n (s) +
κ′(s)
κ2(s)τ(s)
−→b (s) (5.1)
1. Proveu que una corba esta continguda en una esfera si i nomes si totes les seves esferesosculadores coincideixen.
2. Trobeu el radi de l’esfera osculadora.
3. Siguin R(s) = 1κ(s) i T (s) = 1
τ(s) , suposant que R′ 6= 0 demostreu que α es una corba
esferica si i nomes si R2 + (TR′)2 = a2, on a es una constant. Indicacio: demostreu queradi constant implica centre constant i per aixo deriveu les formules (5.1) i l’obtingudaa l’apartat 2.
Figura 5.1: Esfera osculadora d’un nus toric.
§5.2 Corbes esferiques. Sigui α(s) una corba parametritzada per l’arc continguda en l’esferaunitat
x2 + y2 + z2 = 1.
1. Proveu que les seves funcions curvatura i torsio verifiquen
κ(s) =√
1 + k(s)2 i τ(s) =±k′(s)
1 + k(s)2, (5.2)
on k(s) = det(α(s), α′(s), α′′(s)). Interpreteu fısicament la magnitud k(s).
2. Proveu que els vectors α(s),~t(s), i~t(s) := α(s) × ~t(s) formen una base ortonormal iverifiquen el seguent sistema d’equacions diferencials
α′(s) = ~t(s)~t′(s) = −α(s) + k(s)i~t(s)
i~t′(s) = −k(s)~t(s)
25
3. Recıprocament, proveu que si la curvatura i la torsio de α(s) es poden expressar com(5.2) aleshores α(s) esta continguda en una esfera de radi 1.
4. Descriviu les corbes esferiques amb curvatura i torsio donades per (5.2) amb k(s) = k0
constant.
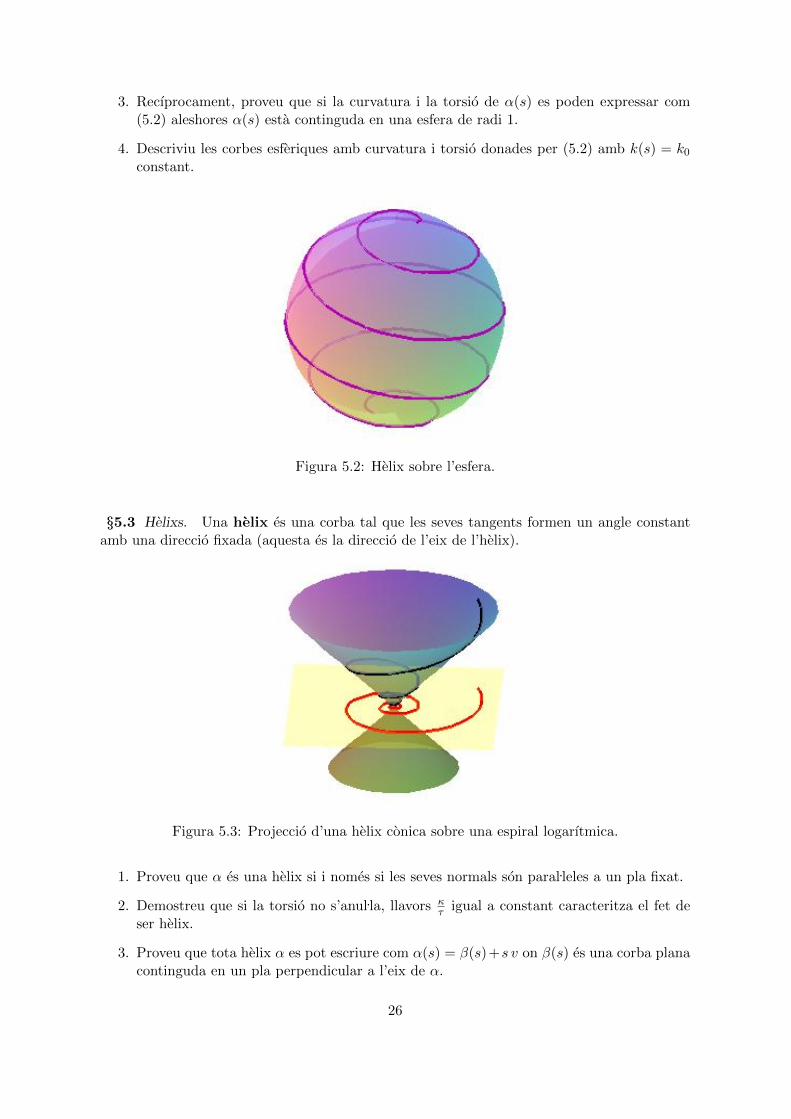
Figura 5.2: Helix sobre l’esfera.
§5.3 Helixs. Una helix es una corba tal que les seves tangents formen un angle constantamb una direccio fixada (aquesta es la direccio de l’eix de l’helix).
Figura 5.3: Projeccio d’una helix conica sobre una espiral logarıtmica.
1. Proveu que α es una helix si i nomes si les seves normals son paral.leles a un pla fixat.
2. Demostreu que si la torsio no s’anul.la, llavors κτ igual a constant caracteritza el fet de
ser helix.
3. Proveu que tota helix α es pot escriure com α(s) = β(s)+s v on β(s) es una corba planacontinguda en un pla perpendicular a l’eix de α.
26

4. Trobeu la corba plana associada a una helix sobre un con d’eix el de l’helix.
5. Comproveu que la corba α(t) = (a cos t, a sin t, bt) es una helix. Trobeu l’eix i la corbaplana associada.
Figura 5.4: La barana d’una escala de cargol es una helix cilındrica. (Sagrada Famılia deBarcelona.)
6. Considereu la corba parametritzada α(t) = (cosh t, sinh t, t), t ∈ R. Trobeu-ne la curva-tura i la torsio. Demostreu que α es una helix.
7. Caracteritzeu la curvatura i la torsio de totes les helixs esferiques.
Figura 5.5: A la natura trobem exemples d’helix com ara l’helix conica.
§5.4 Corbes de Bertrand. En 1848 J. Bertrand va considerar la seguent relacio entre duescorbes α, α : I → R3. Direm que α i α son una parella de corbes de Bertrand si i nomes si lesrectes normals a α(t) i α(t) coincideixen per tot t ∈ I. Una corba es diu de Bertrand si admetuna parella de Bertrand diferent d’ella mateixa.
1. Proveu que una helix circular α(t) = (a cos t, a sin t, b t) es de Bertrand i admet unainfinitat de parelles de Bertrand.
27

Figura 5.6: El model d’ADN es un exemple de doble helix on les dues helixs son parelles deBertrand. (Museu de les Ciencies de Valencia.)
Sigui α : I → R3 una corba de Bertrand amb curvatura i torsio mai nules.
2. Proveu que la distancia entre α(t) i α(t) es una constant a.
3. Proveu que l’angle entre els vectors tangents ~tα(t) i ~tα(t) tambe es una constant θ.
4. La curvatura k(t) i la torsio τ(t) de α satisfan la relacio
k(t)± τ(t) cot(θ) = ±1
a.
5. Recıprocament, si la curvatura i la torsio d’una corba α satisfan la relacio
P k(t) +Qτ(t) = R
per certes constants no nules P,Q,R, aleshores α es de Bertrand.
6. Proveu que si una corba de Bertrand α admet mes d’una parella aleshores les sevescurvatura i torsio son constants, i per tant, es tracta d’una helix circular.
7. Proveu que el producte de les torsions de dos parelles de Bertrand es constant.
8. Sigui u(t) una corba continguda en l’esfera de radi 1 parametritzada per l’arc i a, θconstants. Proveu que
α(t) = a
∫u(t) dt+ a cot(θ)
∫u(t)× u′(t) dt
defineix una corba de Bertrand i descriviu la seva parella.
9. Intenteu trobar (maple, llibres, articles, internet,...) una representacio grafica d’unaparella de Bertrand que no sigui la doble helix.
28

6 Tubs. Teoremes de Fenchel i de Fary-Milnor.
§6.1 Corbes paral.leles en el pla. Donada una corba γ al pla, regular, unitaria i de longitudL es considera la corba γε(t) = γ(t) + εn(t).
Exercici 6.1.1. Per quins valors de ε podem assegurar que γε es regular?
Exercici 6.1.2. Doneu una expressio per la longitud de γε (fet en un altre practica).
Exercici 6.1.3. Suposeu que γ es la frontera d’un conjunt convex K. Considerem la corbaparal.lela exterior a distancia r. Calculeu la longitud de γr.
Figura 6.1: Corbes paral.leles
§6.2 Area d’un convex paral.lel. Sigui K un convex compacte del pla i Kr el conjunt depunts a distancia menor o igual que K.
Exercici 6.2.1. Suposant que la frontera de K es una corba regular, trobeu una expressio Arper l’area de Kr.
Exercici 6.2.2. Compareu aquest resultat amb l’area del convex paral.lel a distancia r d’unpolıgon. Com son els coeficients del polinomi obtingut?
Figura 6.2: Convex paral.lel a un polıgon
§6.3 Superfıcie paral.lela Sigui S una superfıcie regular parametritzada amb normal unitarin. Per un cert ε considerem la superfıcie Sε formada pels punts x+ εn(x) on x ∈ S.
Exercici 6.3.1. Proveu que per ε prou petit Sε es superfıcie regular.
29
Exercici 6.3.2. Doneu el valors de les curvatures normals de Sε en el punt x+ εn(x) en funciode les curvatures normals a x ∈ S.
Exercici 6.3.3. Quina relacio hi ha entre les curvatures de Gauss de S i Sε?
Suposem ara que S es la frontera d’un conjunt convex K.
Exercici 6.3.4. Calculeu l’area de Sε si el normal que es considera es el normal exterior.
Exercici 6.3.5. Si Kr es el lloc geometric dels punts a distancia menor o igual a r de K, proveula formula de Steiner pel volum Vr de Kr:
Vr = V +Ar +
(∫SH
)r2 +
4π
3r3
on H es la curvatura mitjana de S.
Exercici 6.3.6. Si K es un poliedr convex (per exemple un paral.lel.lepıped), trobeu el volumde Kr i compareu els coeficients amb els obtinguts a la formula de Steiner. Que podeu dir delcoeficient que acompanya a r2?
Nota: Hi ha un article molt bonic amb tıtol What is the length of a potato? An introductionto geometric measure theory de Stephen H Schanuel (Lecture Notes in Math. (1986) vol. 1174pp. 118-126) en el qual es justifica que el coeficient de r2 s’anomeni longitud del convex (de lapatata). De fet, es pot demostrar que aquest coeficient es proporcional a l’amplada mitjanadel convex, es a dir, el promig de les longituds de les projeccions de K sobre totes les rectesque passen per l’origen.
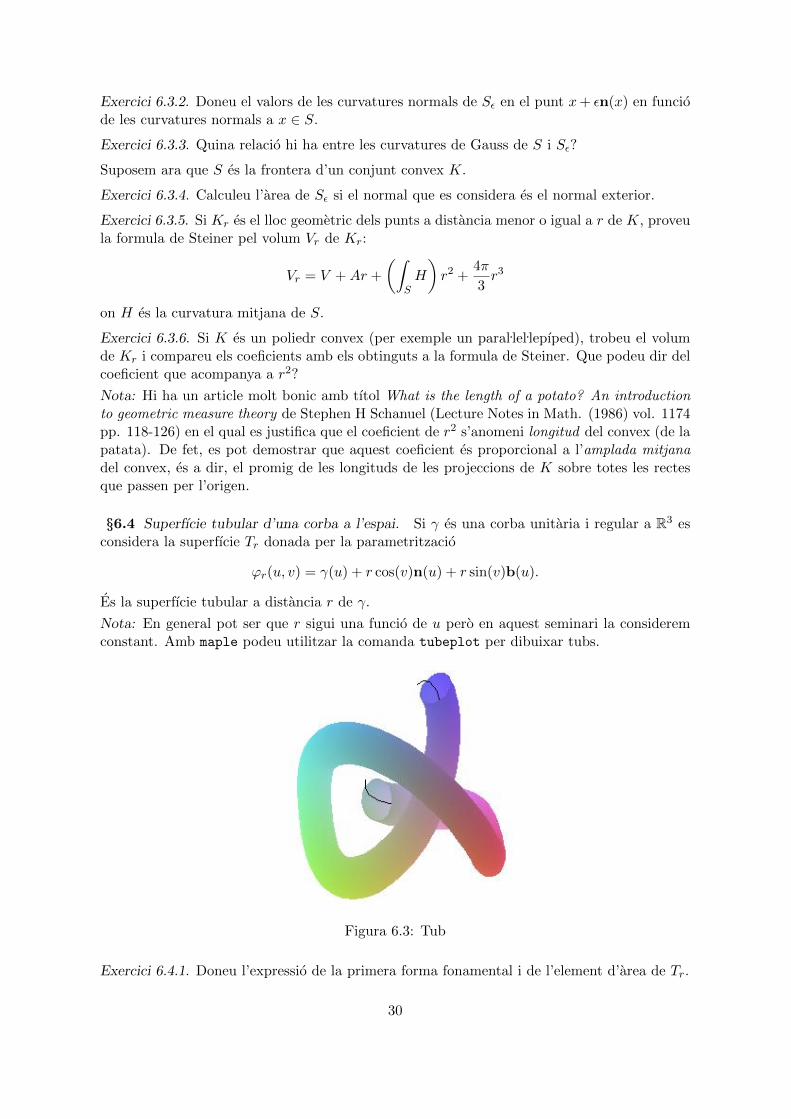
§6.4 Superfıcie tubular d’una corba a l’espai. Si γ es una corba unitaria i regular a R3 esconsidera la superfıcie Tr donada per la parametritzacio
ϕr(u, v) = γ(u) + r cos(v)n(u) + r sin(v)b(u).
Es la superfıcie tubular a distancia r de γ.
Nota: En general pot ser que r sigui una funcio de u pero en aquest seminari la consideremconstant. Amb maple podeu utilitzar la comanda tubeplot per dibuixar tubs.
Figura 6.3: Tub
Exercici 6.4.1. Doneu l’expressio de la primera forma fonamental i de l’element d’area de Tr.
30

Exercici 6.4.2. Si r es prou petit i γ es tancada, trobeu l’area de la superfıcie tubular.
Exercici 6.4.3. Doneu una expressio per la segona forma fonamental de Tr.
Exercici 6.4.4. Trobeu la curvatura de Gauss i la curvatura mitjana.
§6.5 Volum d’un tub a l’espai. Si γ es corba regular tancada a R3 i r es prou petit, trobeuel volum del lloc geometric dels punts a distancia menor o igual a r de γ. Observeu que Tr esla frontera d’aquest conjunt.
Exercici 6.5.1. Trobeu el volum d’un tor fent el calcul directe i comparant despres amb laformula pel volum dels tubs.
§6.6 Teorema de Fenchel. Sabem d’un seminari anterior que per tota corba γ regular planai simple es te que
∫γ k = 2π. Suposem ara que γ es una corba a l’espai. Si γ es plana tenim
la curvatura kR2
com a corba plana i la curvatura kR3
com a corba de l’espai. La primera tesigne i la segona es sempre positiva (o potser nul.la).
Exercici 6.6.1. Proveu que si γ es una corba de l’espai, continguda en un pla i simple, llavors∫γkR
3 ≥ 2π
i que la igualtat es dona si i nomes si γ es convexa.
En un apartat anterior heu vist que si Tε es el tub de γ amb radi ε, es te que l’element d’areai la curvatura de Gauss son
dAε = ε|1− εk(u) cos(v)|du dv, K = − k(u) cos(v)
ε(1− εk(u) cos(v))
respectivament. A mes, si ε es prou petit (com?) podem considerar |1 − εk(u) cos(v)| =1− εk(u) cos(v). Sigui R la regio del tub Tε en la qual K ≥ 0.
Exercici 6.6.2. Proveu que∫RK = 2
∫γ k.
Exercici 6.6.3. Sigui S superfıcie regular, compacta orientada i de classe C2. Proveu que percada v ∈ S2 (vector unitari) existeix al menys un punt p ∈ S amb curvatura de Gauss nonegativa tal que v = n. Deduıu d’aquı que
∫γ k ≥ 2π.
Aixo es la primera part del teorema de Fenchel. Veiem ara quan es dona la igualtat.
Per cada u sigui Γu la imatge per l’aplicacio de Gauss del meridia v → γε(u, v). Denotem perΓ+u la part de Γu provinent dels punts on la curvatura de Gauss es no negativa.
Exercici 6.6.4. Proveu que Γ+u es un semicercle maxim i que els seus extrems son la imatge
per l’aplicacio de Gauss de la interseccio de la recta binormal en γ(u) amb Tε.
Exercici 6.6.5. Proveu que si γ es plana i convexa tots els Γ+u passen per punts fixats p i q de
l’esfera S2. Qui son aquests punts?
Exercici 6.6.6. Suposem que∫γ k = 2π. Imagineu que els semicercles Γ+
u no passen tots perpunts fixats p i q. Deduıu que han d’existir com a mınim dos punt a Tε amb mateixa imatgeper l’aplicacio de Gauss. Proveu en aquest cas que la integral de curvatura es mes gran que2π.
Aixo contradiu la hipotesi∫γ k = 2π. Llavors en aquest cas ha de passar que tots els Γ+
u tenenper extrems dos punts fixats i antipodals p i q de l’esfera.
31
Exercici 6.6.7. Proveu que si∫γ k = 2π la corba ha de ser plana. Proveu a mes que la corba
ha de ser convexa.
Finalment hem demostrat el famos
Teorema. (Fenchel) La curvatura total d’una corba tancada i simple es mes gran o igual que2π. La igualtat es dona si i nomes si la corba es plana i convexa.
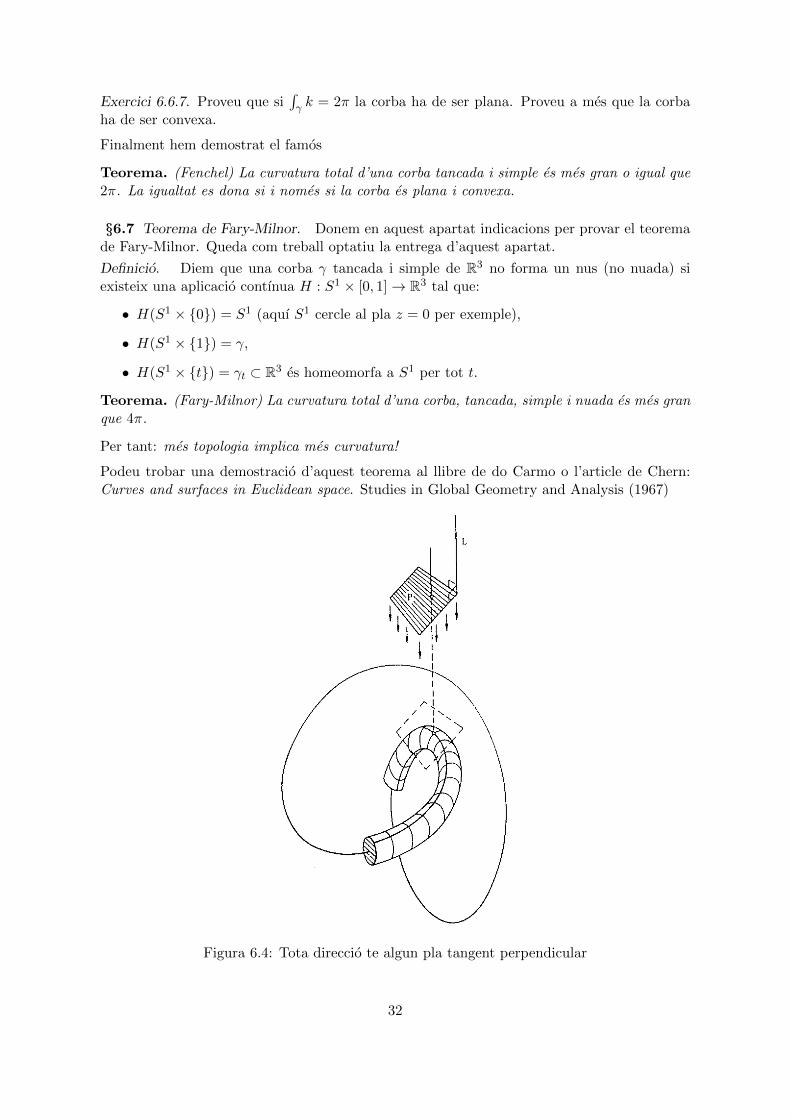
§6.7 Teorema de Fary-Milnor. Donem en aquest apartat indicacions per provar el teoremade Fary-Milnor. Queda com treball optatiu la entrega d’aquest apartat.
Definicio. Diem que una corba γ tancada i simple de R3 no forma un nus (no nuada) siexisteix una aplicacio contınua H : S1 × [0, 1]→ R3 tal que:
• H(S1 × 0) = S1 (aquı S1 cercle al pla z = 0 per exemple),
• H(S1 × 1) = γ,
• H(S1 × t) = γt ⊂ R3 es homeomorfa a S1 per tot t.
Teorema. (Fary-Milnor) La curvatura total d’una corba, tancada, simple i nuada es mes granque 4π.
Per tant: mes topologia implica mes curvatura!
Podeu trobar una demostracio d’aquest teorema al llibre de do Carmo o l’article de Chern:Curves and surfaces in Euclidean space. Studies in Global Geometry and Analysis (1967)
Figura 6.4: Tota direccio te algun pla tangent perpendicular
32

7 Geodesiques i altres corbes especials sobre superfıcies
§7.1 Equacions d’Euler-Lagrange. La formulacio lagrangiana de la mecanica classica s’obtea partir de l’accioA(α) =
∫ ba L(α, α′) dt, on L = T−V es la funcio de Lagrange (energia cinetica
T (α′) = 12m‖α
′‖2 menys energia potencial V (α)). La trajectoria real α(t) d’una partıculaverifica que A(α) es mınima: es el conegut principi de mınima accio. De manera equivalent,hem d’imposar que per tota variacio δα de α que s’anul.li als extrems (δα
∣∣t=a
= δα∣∣t=b
= 0)la variacio infinitesimal δA = A(α+ δα)−A(α) de A ha de ser zero:
0 = δA =
∫ b
a
(∂L
∂αδα+
∂L
∂α′δα′)dt =
∫ b
a
[∂L
∂α− d
dt
(∂L
∂α′
)]δα dt+
[∂L
∂α′δα
]t=bt=a
,
utilitzant que ddt
(∂L∂α′ δα
)= d
dt
(∂L∂α′
)δα+ ∂L
∂α′ δα′ resulten doncs les equacions d’Euler-Lagrange:
∂L
∂αi− d
dt
(∂L
∂α′i
)= 0. (7.1)
Exercici 7.1.1. Comproveu que si la forca exterior prove d’un potencial V , i.e. F = −∇V =−( ∂V∂x1 ,
∂V∂x2
, ∂V∂x3 ), aleshores la segona llei de Newton F = ma es equivalent a les equacions(7.1).
§7.2 Equacions d’Hamilton. La formulacio hamiltoniana de la mecanica classica s’obte apartir de la funcio hamiltoniana H(q, p) = T (p)+V (q), on qi = xi son les posicions i pi = mdxi
dtson les components del moment lineal, mitjancant les equacions de Hamilton:
d qidt
=∂H
∂pi,
d pidt
= −∂H∂qi
. (7.2)
Exercici 7.2.1. Comproveu que les equacions (7.2) son equivalents a les equacions (7.1). Uti-litzant aquestes comproveu que l’energia total del sistema H = T + V es mante constant alllarg de les trajectories.
Exercici 7.2.2. Considerem una partıcula de massa unitat que es mou sobre una superfıcieregular S ⊂ R3 parametritzada localment per x(u, v). Si descrivim la seva trajectoria α(t) encoordenades locals mitjancant t 7→ (u(t), v(t)) escriviu quina es la seva energia cinetica.
Si no hi ha cap forca exterior aleshores l’energia potencial es zero i la funcio de Lagrangeassociada es justament l’energia cinetica
L(u, v, u′, v′) = E(u, v)(u′)2
2+ F (u, v)u′v′ +G(u, v)
(v′)2
2.
Exercici 7.2.3. Escriviu les equacions d’Euler-Lagrange del moviment
∂L
∂u− d
dt
∂L
∂u′= 0,
∂L
∂v− d
dt
∂L
∂v′= 0 (7.3)
i comproveu que son equivalents a imposar que α′′ no te component tangent a S. Per aixoconsidereu l’expressio de l’acceleracio utilitzant els sımbols de Christoffel Γkij de S associats ala parametritzacio x:
α′′ = (u′′ + Γ111(u′)2 + 2Γ1
12u′v′ + Γ1
22(v′)2)xu + (v′′ + Γ211(u′)2 + 2Γ2
12u′v′ + Γ2
22(v′)2)xv
+ (e(u′)2 + 2fu′v′ + g(v′)2)N
33

i comproveu que el sistema d’equacions 〈α′′,xu〉 = 0, 〈α′′,xv〉 = 0 equival a les equacions (7.3)utilitzant les expressions dels sımbols de Christoffel en funcio de E,F,G i les seves derivades:
EΓ111 + FΓ2
11 = Eu2 EΓ1
12 + FΓ212 = Ev
2 EΓ122 + FΓ2
22 = Fv − Gu2
FΓ111 +GΓ2
11 = Fu − Ev2 FΓ1
12 +GΓ212 = Gu
2 FΓ122 +GΓ2
22 = Gv2
Aixı doncs les trajectories d’una partıcula que es mou lliurement sobre la superfıcie S sonaquelles sobre les quals l’acceleracio tangent a S es zero, i.e. les geodesiques de S.
Exercici 7.2.4. Comproveu que la conservacio de l’energia en aquest cas es tradueix en el fetde que la velocitat escalar es constant al llarg de les geodesiques.
Exercici 7.2.5. Vegeu que les geodesiques tambe son extremals del funcional longitud L(α) =∫‖α′(t)‖ dt. Considereu una corba α0(t) parametritzada per l’arc t ∈ [0, `] i una variacio
s ∈ (−ε, ε) 7→ αs(t) amb extrems fixes, αs(0) = α0(0) i αs(`) = α0(`) per tot s ∈ (−ε, ε), icomproveu, integrant per parts, que la variacio de L satisfa la seguent relacio:
∂
∂s
∣∣∣s=0L(αs) =
1
2
∫ `
0
∂
∂s
∣∣∣s=0〈α′s(t), α′s(t)〉 dt = −
∫ `
0〈 ∂∂s
∣∣∣s=0
αs,∂2
∂t2α0〉 dt.
Exercici 7.2.6. Escriviu les equacions de les geodesiques sobre una superfıcie de revolucioparametritzada per x(u, v) = (ρ(u) cos v, ρ(u) sin v, ζ(u)).
Exercici 7.2.7. Comproveu que una de les dues equacions expressa la conservacio d’una certaquantitat al llarg de les geodesiques. Interpreteu geometrica i fısicament aquesta quantitat(teorema de Clairaut).
§7.3 Geodesiques i lınies assimptotiques sobre superfıcies de revolucio. A continuacio, con-siderarem les seguents superfıcies de revolucio:
(i) l’hiperboloide d’un full S = x2 + y2 − z2 = 1;
(ii) el catenoide S = x2 + y2 = cosh2 z;
(iii) el tor S = (√x2 + y2 − a)2 + z2 = r2.
Exercici 7.3.1. Parametritzeu cadascuna d’elles i trobeu els coeficients e(u, v), f(u, v) i g(u, v)de la seva segona forma fonamental.
Exercici 7.3.2. Plantejeu l’equacio diferencial II(α′(t)) = 0 que satisfan les lınies asimptotiquesescrivint α′ = xu u
′ + xv v′.
Exercici 7.3.3. Busqueu les solucions de la forma v = h(u) + c, c ∈ R i obtingueu expressionsadients per les funcions h : R→ R en cada cas.
Exercici 7.3.4. Representeu graficament el resultat amb les comandes seguents de maple:
with(plots):phi:=(u,v)->[?*cos(v),?*sin(v),?]:h:=v->int(?,u=?..v):
dib0:=plot3d(phi(u,v),u=?..?,v=0..2*Pi,transparency=0.5,style=PATCHNOGRID):
dib1:=seq(spacecurve(phi(v,h(v)+2*Pi/10*i),v=?..?,thickness=3,color=red,
numpoints=100),i=1..10):dib2:=seq(spacecurve(phi(v,-h(v)+2*Pi/10*i),v=?..?,
thickness=3,color=blue,numpoints=100),i=1..10):
display([dib0,dib1,dib2],scaling=constrained);
34

Figura 7.1: Lınies asimptotiques del tor de revolucio.
Exercici 7.3.5. A partir de l’expressio obtinguda a l’exercici 7.7, resoleu numericament irepresenteu graficament algunes geodesiques sobre el tor de revolucio a partir de condicionsinicials concretes:
eq:=diff(u(t),t$2)+...=0,diff(v(t),t$2)+...=0:T:=50;theta:=0.3;
ci:=u(0)=0.5,v(0)=0,D(u)(0)=cos(theta),D(v)(0)=sin(theta);
sol:=dsolve(op(subs([R=2,r=1],eqns)),ci,range=0..T,numeric):
with(plots):sup:=plot3d([x(u,v),y(u,v),z(u,v)],u=...,v=...,style=
patchnogrid,transparency=0.5,scaling=constrained,axes=none):
geo:=odeplot(sol, [x(u(t),v(t)),y(u(t),v(t)),z(u(t),v(t)),color=
blue,thickness=2],0..T,frames=5*T):display([sup,geo],view=[...]);
Figura 7.2: Geodesica del tor de revolucio.
§7.4 Estudi de l’el.lipsoide de tres eixos amb maple. Finalment, anem a estudiar les lıniesde curvatura d’una de les superfıcies mes senzilles que no sigui de revolucio: l’el.lipsoide detres eixos
x2
a2+y2
b2+z2
c2= 1, 0 < a < b < c.
Carreguem els packages que necessitem i introduım la parametritzacio usual:
with(VectorCalculus):with(linalg):with(plots):
x:=<a*cos(u)*cos(v),b*cos(u)*sin(v),c*sin(u)>:
35
A continuacio calculem els vectors tangents xu,xv i els coeficients E,F,G de la primera formafonamental:
xu:=simplify(diff(x,u),trig);xv:=simplify(diff(x,v),trig);
E:=simplify(DotProduct(xu,xu),trig);F:=simplify(DotProduct(xu,xv),trig);
G:=simplify(DotProduct(xv,xv),trig);
Despres calculem el vector normal unitari N, les derivades segones xuu,xuv,xvv de la para-metritzacio x i els coeficients e, f, g de la segona forma fonamental:
N:=simplify(CrossProduct(xu,xv)/sqrt(E*G-F^2),trig);
xuu:=simplify(diff(x,u,u),trig);xuv:=simplify(diff(x,u,v),trig);
xvv:=simplify(diff(x,v,v),trig);
e:=simplify(DotProduct(xuu,N),trig);f:=simplify(DotProduct(xuv,N),trig);
g:=simplify(DotProduct(xvv,N),trig);
Finalment, utilitzem l’expressio ∣∣∣∣∣∣dv2 −du dv du2
E F Ge f g
∣∣∣∣∣∣ = 0
de l’equacio diferencial per les lınies de curvatura:
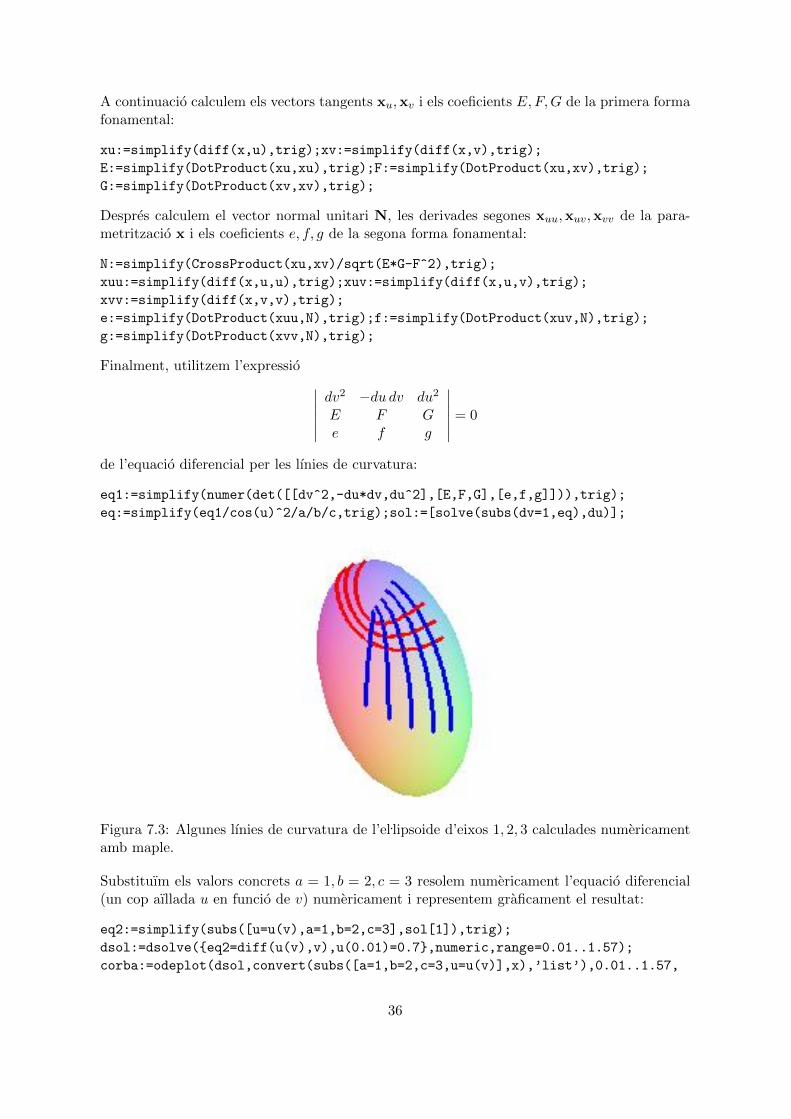
eq1:=simplify(numer(det([[dv^2,-du*dv,du^2],[E,F,G],[e,f,g]])),trig);
eq:=simplify(eq1/cos(u)^2/a/b/c,trig);sol:=[solve(subs(dv=1,eq),du)];
Figura 7.3: Algunes lınies de curvatura de l’el.lipsoide d’eixos 1, 2, 3 calculades numericamentamb maple.
Substituım els valors concrets a = 1, b = 2, c = 3 resolem numericament l’equacio diferencial(un cop aıllada u en funcio de v) numericament i representem graficament el resultat:
eq2:=simplify(subs([u=u(v),a=1,b=2,c=3],sol[1]),trig);
dsol:=dsolve(eq2=diff(u(v),v),u(0.01)=0.7,numeric,range=0.01..1.57);
corba:=odeplot(dsol,convert(subs([a=1,b=2,c=3,u=u(v)],x),’list’),0.01..1.57,
36

thickness=3,color=red):
sup:=plot3d(convert(subs([a=1,b=2,c=3],x),’list’),u=-Pi/2..Pi/2,v=0..2*Pi,
scaling=constrained,style=patchnogrid):
display(corba,sup);
Podem iterar aquest proces amb diferents condicions inicials i tambe aıllant v en funcio de u.El resultat s’aprecia a la Figura 3.
§7.5 Lınies de curvatura i geodesiques sobre l’el.lipsoide de tres eixos. Finalment, anem aestudiar amb mes detall les lınies de curvatura i les geodesiques de l’el.lipsoide de tres eixos
E0 :=
x2
1
a1+x2
2
a2+x2
3
a3= 1
, amb 0 < a1 < a2 < a3.
Per fer aixo, considerem la famılia de quadriques
Eλ :=
x2
1
a1 − λ+
x22
a2 − λ+
x23
a3 − λ= 1
parametritzades per λ ∈ R \ a1, a2, a3. Com que el que ve a continuacio es una mica llargqueda com treball optatiu l’entrega d’aquest apartat.
Exercici 7.5.1. Descriviu quins tipus de quadrica es Eλ en funcio del parametre λ.
Figura 7.4: Tres quadriques diferents de la famılia Eλ.
Exercici 7.5.2. Comproveu que tot punt (x1, x2, x3) de R3 amb x1x2x3 6= 0 pertany a exacta-ment tres quadriques (de tipus diferent). Proveu que els vectors normals a cadascuna d’ellesson dos a dos ortogonals. Aixo es el que es coneix amb el nom de sistema triplement ortogonalde superfıcies.
Exercici 7.5.3. Doneu altres exemples de sistemes triplement ortogonals.
Exercici 7.5.4. Proveu el teorema de Dupin: les superfıcies d’un sistema triplement ortogonales tallen seguint les seves lınies de curvatura.
37
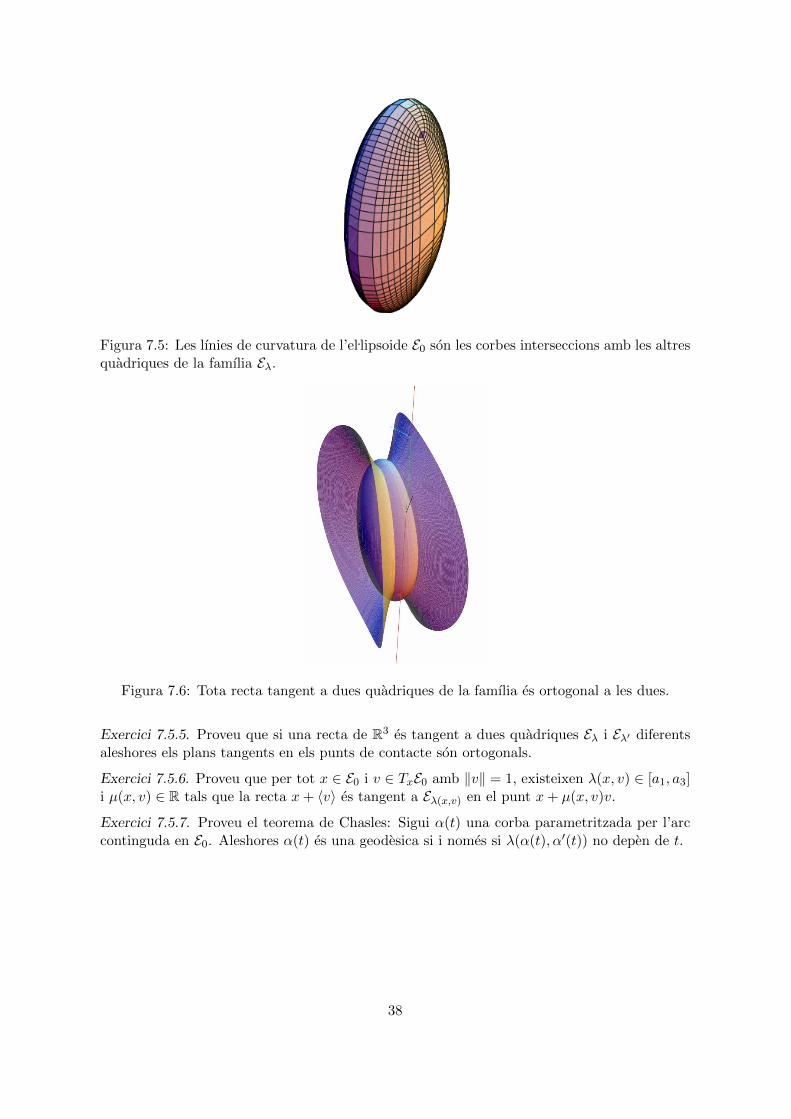
Figura 7.5: Les lınies de curvatura de l’el.lipsoide E0 son les corbes interseccions amb les altresquadriques de la famılia Eλ.
Figura 7.6: Tota recta tangent a dues quadriques de la famılia es ortogonal a les dues.
Exercici 7.5.5. Proveu que si una recta de R3 es tangent a dues quadriques Eλ i Eλ′ diferentsaleshores els plans tangents en els punts de contacte son ortogonals.
Exercici 7.5.6. Proveu que per tot x ∈ E0 i v ∈ TxE0 amb ‖v‖ = 1, existeixen λ(x, v) ∈ [a1, a3]i µ(x, v) ∈ R tals que la recta x+ 〈v〉 es tangent a Eλ(x,v) en el punt x+ µ(x, v)v.
Exercici 7.5.7. Proveu el teorema de Chasles: Sigui α(t) una corba parametritzada per l’arccontinguda en E0. Aleshores α(t) es una geodesica si i nomes si λ(α(t), α′(t)) no depen de t.
38

8 Sessio de problemes sobre superfıcies
§8.1 Superfıcies de revolucio. El conjunt de punts descrit per una corba plana regularC ⊂ Π al girar sobre un eix contingut en el pla Π i que no talla a la corba C es una superfıcieregular anomenada superfıcie de revolucio generada per la corba C.
Exercici 8.1.1. Proveu que si C = (x, 0, z) ∈ Π = y = 0 ⊂ R3, f(x, z) = 0 i espren com a eix de gir Oz aleshores la superfıcie de revolucio generada per C ve donada perS = (x, y, z) ∈ R3, f(
√x2 + y2, z) = 0. Trobeu una equacio de la superfıcie de revolucio
generada per una circumferencia que no contingui en el seu interior l’origen de coordenades.
Exercici 8.1.2. Demostreu que si α(u) = (a(u), 0, b(u)) es una parametritzacio regular de Caleshores
x(u, v) = (a(u) cos v, a(u) sin v, b(u))
es una parametritzacio regular de S. Les corbes coordenades d’aquesta parametritzacio s’a-nomenen paral.lels si u = u0 i meridians si v = v0. Trobeu una parametritzacio regular deltor en funcio dels seus dos radis.A partir d’ara suposarem que a(u) > 0 i que α(u), u ∈ [0, `], esta parametritzada per l’arc.
Exercici 8.1.3. Trobeu la primera forma fonamental d’una superfıcie de revolucio utilitzant laparametritzacio x anterior.
Exercici 8.1.4. Comproveu el teorema de Pappus: l’area de S ve donada per 2π∫ `
0 a(u)du.Trobeu l’area del tor en funcio dels seus dos radis.
Exercici 8.1.5. Calculeu el sımbols de Christoffel i les equacions de les geodesiques de S.
Exercici 8.1.6. Comproveu que els meridians d’una superfıcie de revolucio son geodesiques.
Exercici 8.1.7. Proveu que un paral.lel es una geodesica si i nomes si la recta tangent almeridia que passa per cada un dels seus punts es paral.lela a l’eix de rotacio de la superfıcie.Apliqueu-ho al cas de l’esfera i del tor.
Exercici 8.1.8. Demostreu el teorema de Clairaut : si α(s) es una geodesica (parametritzada)de S i θ(s) es l’angle que forma α amb el paral.lel per α(s), aleshores el producte de la distanciade α(s) a l’eix de gir pel cosinus de θ(s) es constant al llarg de la corba α.
Exercici 8.1.9. Trobeu la curvatura geodesica i la curvatura normal dels paral.lels (u = u0) enfuncio de a(u).
§8.2 Isometries. Una aplicacio diferenciable f : S → S entre dues superfıcies regulars esuna isometria si te inversa diferenciable i per tot punt p ∈ S la diferencial dfp : TpS → Tf(p)Spreserva la primera forma fonamental, i.e.
Ip(w1,w2) = 〈w1,w2〉 = 〈dfp(w1), dfp(w2)〉 = If(p)(dfp(w1), dfp(w2)).
Una isometria local es una aplicacio diferenciable f : S → S entre superfıcies regulars talque la restriccio de f a un entorn prou petit de cada punt de S es una isometria amb la sevaimatge.
Exercici 8.2.1. Siguin x : U ⊂ R2 → S i x : U ⊂ R2 → S parametritzacions regulars injectivesde dues superfıcies S i S i (g1, g2) = x−1 f x : U ⊂ R2 → U ⊂ R2 l’expressio en coordenadeslocals d’una aplicacio diferenciable f : S → S. Aleshores f es una isometria local si i nomes si( ∂g1
∂u∂g1∂v
∂g2∂u
∂g2∂v
)t(E FF G
)( ∂g1∂u
∂g1∂v
∂g2∂u
∂g2∂v
)=
(E FF G
).
39

Exercici 8.2.2. Dues superfıcies S i S son localment isometriques si i nomes si existeixenparametritzacions regulars injectives x : U ⊂ R2 → S i x : U ⊂ R2 → S tals que els coeficientsde les seves primeres formes fonamentals coincideixen: E(u, v) = E(u, v), F (u, v) = F (u, v),G(u, v) = G(u, v). Deduıu que en aquest cas les curvatures de Gauss de S i S coincideixen enels punts corresponents.
Exercici 8.2.3. Comproveu que el con i el cilindre son localment isometrics al pla. (Indicacio:fer-los rodar.)
Exercici 8.2.4. Sigui C ⊂ R2 una corba regular plana. Proveu que SC = (x, y, z) ∈R3, (x, y) ∈ C es una superfıcie regular localment isometrica al pla i calculeu les sevescurvatures principals en funcio de la curvatura de C.
Exercici 8.2.5. Sigui α : I ⊂ R → R3 una corba parametritzada per l’arc tal que ‖α(t)‖ = 1per tot t ∈ I. Calculeu la primera forma fonamental de la superfıcie parametritzada perx(u, v) = vα(u), u ∈ I, v > 0, i comproveu que es localment isometrica al pla.
Exercici 8.2.6. Justifiqueu per que les seguents superfıcies no son dues a dues localmentisometriques: l’esfera, el pla, el paraboloide z = x2 + y2 i la sella z = x2 − y2.
§8.3 Geodesiques. Sigui S una superfıcie regular i α : I ⊂ R → S ⊂ R3 una corbaparametritzada continguda en S. Recordeu que α(t) es geodesica si i nomes si no te acceleraciotangent a S. Recordeu tambe que si x : U ⊂ R2 → S es una parametritzacio regular de S iα(t) = x(u(t), v(t)) aleshores α(t) es geodesica si i nomes si u(t) i v(t) verifiquen el sistemad’equacions diferencials:
u′′ + Γ111u′2 + 2Γ1
12u′v′ + Γ1
22v′2 = 0
v′′ + Γ211u′2 + 2Γ2
12u′v′ + Γ2
22v′2 = 0
Una corba C ⊂ S (no parametritzada) s’anomena geodesica si admet una parametritzacio perla qual ho es.
Exercici 8.3.1. Proveu que una corba C ⊂ S es geodesica si i nomes si n = ±N, on n es elvector normal de C com a corba de R3 i N es el vector normal de S.
Exercici 8.3.2. Determineu quines son totes les geodesiques del pla, del cilindre i de l’esfera.
Exercici 8.3.3. Si dues superfıcies son tangents al llarg d’una corba C, aleshores C es geodesicaa una d’elles si i nomes si ho es a l’altra.
Exercici 8.3.4. Demostreu que tota corba α : I ⊂ R → R3 parametritzada per l’arc esgeodesica d’alguna superfıcie. Indicacio considereu la superfıcie reglada parametritzada perx(u, v) = α(u) + vb(u). Descriviu un metode per determinar manualment les geodesiquesd’una superfıcie fısica mitjancant una cinta adhesiva.
§8.4 El pla hiperbolic. Considereu una superfıcie S (semipla de Poincare) parametritzadaper l’obert H = (u, v) ∈ R2 | v > 0 de R2 amb primera forma fonamental donada perE(u, v) = G(u, v) = 1
v2i F (u, v) = 0.
Exercici 8.4.1. Trobeu-ne les equacions de les geodesiques, els sımbols de Christoffel i lacurvatura de Gauss.
Exercici 8.4.2. Trobeu la curvatura geodesica de les corbes que en coordenades locals venendonades per γa(t) = (at, t), t > 0.
Exercici 8.4.3. Proveu que les aplicacions z = u + iv 7→ 1z = 1
u−iv i z 7→ az + b, a, b ∈ R deH → C son isometries. Deduıu que totes les geodesiques de H son les semirectes verticals i elssemicercles ortogonals a v = 0 (i.e. amb centre sobre v = 0).
40

§8.5 Derivada covariant i transport paral.lel. Un camp vectorial (diferenciable) tangent Xa una superfıcie S es per definicio una combinacio lineal X = axu + bxv de la base de campstangents xu i xv amb coeficients a(u, v), b(u, v) funcions diferenciables. A partir dels sımbolsde Christoffel Γkij es pot definir una manera de derivar camps tangents seguint les seguentsregles:
• ∇axu+bxvX = a∇xuX + b∇xvX;
• ∇xu(aX) = ∂a∂uX + a∇xuX i ∇xv(aX) = ∂a
∂vX + a∇xvX;
• ∇xuxu = Γ111xu + Γ2
11xv, ∇xuxv = ∇xvxu = Γ111xu + Γ2
11xv i ∇xvxv = Γ122xu + Γ2
22xv.
L’operador ∇ que obtenim s’anomena derivada covariant intrınseca de S.
Exercici 8.5.1. Siguin X1, X2, Y1, Y2 camps tangents a S i α(t) una corba tal que α(0) = p,α′(0) = X1(p) = X2(p). Proveu que si Y1(α(t)) = Y2(α(t)) aleshores els camps tangents∇X1Y1 i ∇X2Y2 coincideixen en el punt p.Aixı doncs, per obtenir el valor de la derivada covariant d’un camp tangent Y respecte d’unaltre X en un punt p nomes cal coneixer X(p) i Y sobre una corba tangent a X(p) en p.
Si α(t) = x(u(t), v(t)) es una corba de S aleshores podem considerar el camp tangent α′ =u′xu + v′xv definit al llarg de α(t).
Siguin X,Y = (Y1, Y2, Y3) camps de R3, definim la derivada covariant a R3 mitjancant ∇XY =(DXY1, DXY2, DXY3), on DX denota la derivada direccional en la direccio X.
Exercici 8.5.2. Proveu que per camps X,Y tangents a una superfıcie S ⊂ R3 es te que∇XY = π(∇XY ), on π : R3 → TS es la projeccio ortogonal.
Un camp tangent X definit al llarg d’una corba α(t) es diu paral.lel si ∇α′X = 0.
Exercici 8.5.3. Comproveu que una corba α(t) = x(u(t), v(t)) es geodesica si i nomes si elcamp X = α′ = u′xu + v′xv es paral.lel, es a dir, verifica que ∇XX = 0.
Exercici 8.5.4. Comproveu que per tot vector tangent v ∈ Tα(0)S existeix un camp tangentX definit al llarg de α(t) que es paral.lel i tal que X(α(0)) = v. Aquest X(α(t)) camps’anomena el transport paral.lel de v al llarg de la corba α(t). (Indicacio: escriure X(α(t)) =a(t)xu+b(t)xv amb funcions a(t), b(t) incognites i imposar l’equacio ∇α′X = 0 amb condicionsinicials a(t0) = a0 i b(t0) = b0, on v = a0xu + b0xv.)
Els calculs que venen a continuacio s’han d’efectuar sobre el semipla de Poincare H introduıtanteriorment.
Exercici 8.5.5. Calculeu ∇XY on X = uxu i Y = uxv − vxu.
Exercici 8.5.6. Trobeu el transport paral.lel del vector xu en el punt γa(t0) al llarg de la corbaγa(t) = (at, t).
41

9 Els teoremes de Gauss i Stokes i les equacions de Maxwell
L’objectiu principal d’aquest seminari es doble: Per una banda, volem donar demostraci-ons intuitives dels teoremes de Gauss i Stokes i, per altra banda, volem comprendre fısica imatematicament les equacions que han de verificar els camps electric E i el camp magneticB.La referencia basica son els tres primers capıtols del volum II (electromagnetisme i materia)del llibre de Feynman.Primer introduirem les nocions de circul.lacio i flux d’un camp vectorial.
§9.1 Circul.lacio i flux d’un camp vectorial. En aquesta seccio treballem la circul.lacio iel flux d’un camp vectorial. De fet la circul.lacio i el flux son integrals de lınea i superfıcierespectivament que s’han vist a classe de teoria pero en el cas de corbes i superfıcies tancades.Sigui C una corba tancada orientada i X un camp vectorial.
• La circul.lacio∫C X ·dL :=
∫C〈X, t〉dL de X al llarg de C es la integral de la component
tangent (amb signe) de X sobre C.
Per definicio, la component tangencial mitjana de X al llarg de C es la circul.lacio divididaper la longitud de C.
Exercici 9.1.1. Calculeu la circul.lacio del camp vectorial
F = y2i− z2j + x2k
al llarg de la trajectoria que va seguint les arestes del cub, 0 ≤ x ≤ 1, 0 ≤ y ≤ 1 i 0 ≤ z ≤ 1sortint de l’origen i despres a (0, 0, 1) a (0, 1, 1) a (1, 1, 1) i que finalment torna a l’origen perla diagonal des de (1, 1, 1).Feu el mateix amb el camp
G(x, y, z) = (x3 − 3xy2)i + (y3 − 3x2y)j + zk.
Si no us heu equivocat als calculs aquesta segona integral us ha de donar zero.Podrıeu deduır-ho sense fer la integral? Calculeu el rotacional de G i deduı-ne que existeixuna funcio f tal que G = ∇(f). Expliciteu-la.
Sigui S una superfıcie tancada (que orientem amb el vector normal unitari exterior N) i X uncamp vectorial.
• El flux∫S X · dS :=
∫S〈X,N〉dA de X a traves de S es la integral de la component
normal (amb signe) de X sobre S.
Per definicio, la component normal mitjana de X a traves de S es el flux dividit per l’area deS.
Exercici 9.1.2. Trobeu el flux del camp radial
X = xi + yj + zk
a traves de la superfıcie tancada donada per:
S = (x, y, z), z = x2 + y2 − 1,−1 ≤ z ≤ 0.
Amb aquestes dues nocions de circul.lacio i flux es poden descriure les lleis de l’electricitat iel magnetisme : llei de Gauss (electrica i magnetica), Faraday i llei d’Ampere. Aquestes lleisdonen lloc a les equacions de Maxwell utilitzant el teorema de Stokes i Gauss. Aixo ho veuremdespres, primer demostrem el teorema de Gauss i el teorema de Stokes.
42

§9.2 El flux sortint a traves de dues superfıcies tancades amb una regio comuna. Sigui D undomini de R3 amb vora S = ∂D una superfıcie regular a trossos. Sigui Σ ⊂ D una superfıcieque separa D en dues regions disjuntes D1 i D2.
Exercici 9.2.1. Proveu que el flux sortint d’un camp vectorial a traves de S es la suma delsfluxos sortint a traves de ∂D1 i ∂D2.
§9.3 El flux sortint d’un cub petit. Sigui F = (F1, F2, F3) un camp vectorial diferenciabledefinit en un obert que contingui el cub C de vertexs (x, y, z), (x + δx, y, z), (x, y + δy, z),(x, y, z+ δz), (x+ δx, y+ δy, z), (x+ δx, y, z+ δz), (x, y+ δy, z+ δz) i (x+ δx, y+ δy, z+ δz).Anem a calcular el flux de F a traves de la superfıcie del cub. Per aixo calcularem el flux atraves de cadascuna de les sis cares.
Exercici 9.3.1. Proveu que el flux de F a traves de la cara de vertexs
• (x, y, z), (x, y, z + δz), (x, y + δy, z + δz), (x, y + δy, z) es igual a −∫F1(x, y, z) dy dz;
• (x+ δx, y, z), (x+ δx, y, z + δz), (x+ δx, y + δy, z + δz), (x+ δx, y + δy, z) es igual a∫F1(x+ δx, y, z) dy dz '
∫F1(x, y, z) dy dz + δx
∫∂F1
∂x(x, y, z) dy dz,
on l’aproximacio anterior es de l’ordre de (δx)2.
Exercici 9.3.2. Proveu que podem aproximar la suma dels fluxos a traves d’aquestes dues caresper ∂F1
∂x (x, y, z)δx δy δz si menyspreem els termes (δx)i(δy)j(δz)k amb i+ j + k > 3.
Exercici 9.3.3. Concloure que sota les mateixes hipotesis que abans el flux de F a traves detota la superfıcie del cub es pot aproximar per(
∂F1
∂x(x, y, z) +
∂F2
∂y(x, y, z) +
∂F3
∂z(x, y, z)
)︸ ︷︷ ︸
∇·F=divergencia de F
δx δy δz.
§9.4 El teorema de Gauss o de la divergencia.
Exercici 9.4.1. Combineu els resultats anteriors per obtenir una prova heurıstica del Teoremade Gauss: si F es una camp vectorial diferenciable i D es una regio de R3 amb vora unasuperfıcie regular a trossos aleshores∫
∂DF · dS =
∫D∇ · F dV.
Exercici 9.4.2. Sigui F el camp F = 2xi + y2j + z2k, i sigui S l’esfera x2 + y2 + z2 = 1 calculeuel flux del camp F a traves de la superfıcie S utilitzant el teorema de Gauss.
Exercici 9.4.3. Apliqueu el teorema de Gauss per calcular el flux del camp F = xy2i+x2yj+yk,a traves de la superfıcie tancada afitada pel cilindre x2 + y2 = 1 i els plans z = 1 i z = −1.
§9.5 La circul.lacio al llarg de dues corbes tancades que comparteixen un arc comu. SiguiC ⊂ R3 una corba tancada (regular a trossos) i fixem dos punts diferents p, q ∈ C. Com queC ∼= S1 tenim que C \p, q esta format per dos arcs disjunts C ′1 i C ′2. Sigui Σ ⊂ R3 un arc decorba que uneix p amb q i C ′1 i definim les corbes tancades (regulars a trossos) Ci = C ′i ∪ Σ,i = 1, 2.
Exercici 9.5.1. Proveu que la circul.lacio d’un camp vectorial al llarg de C es la suma de lescirculacions al llarg de C1 i de C2.
43

§9.6 La circul.lacio d’un camp vectorial al llarg d’un quadrat petit. Podem escollir unescoordenades ortonormals de manera que els seus vertexs siguin (x, y, 0), (x, y + δy, 0), (x +δx, y + δy, 0), (x+ δx, y, 0).
Exercici 9.6.1. Proveu que la circul.lacio de F = (F1, F2, F3) al llarg del costat que uneix
• (x, y, 0) i (x+ δx, y, 0) es∫ x+δxx F1(t, y, 0) dt;
• (x, y + δy, 0) i (x+ δx, y + δy, 0) es
−∫ x+δx
xF1(t, y + δy, 0) dt ' −
∫ x+δx
xF1(t, y, 0) dt− δy
∫ x+δx
x
∂F1
∂y(t, y, 0) dt.
Exercici 9.6.2. Proveu que la circul.lacio de F al llarg de tots quatre costats del quadrat espot aproximar per (
∂F2
∂x(x, y, 0)− ∂F1
∂y(x, y, 0)
)δx δy
si no considerem els termes (δx)i(δy)j amb i+ j > 2.Observem que ∂F2
∂x (x, y, 0)− ∂F1∂y (x, y, 0) es la tercera component del rotacional ∇×F la qual
coincideix amb el producte escalar (∇× F) · (0, 0, 1) = (∇× F) ·N.
§9.7 El teorema de Stokes o del rotacional.
Exercici 9.7.1. Combineu els resultats anteriors per obtenir una prova heurıstica del teoremade Stokes: si F es un camp vectorial diferenciable i S es una superfıcie de R3 amb vora C = ∂Suna corba regular a trossos aleshores∫
CF · dL =
∫S
(∇× F) · dS.
Exercici 9.7.2. SiguiF = yezi + xezj + xyezk,
Demostreu que la circul.lacio de F al llarg d’una corba tancada qualsevol que es vora d’unasuperfıcie tancada es zero.
Exercici 9.7.3. Sigui C una corba tancada que es la vora d’una superfıcie S i sigui v un campconstant. Proveu la igualtat seguent, ∫
Cv · ds = 0.
Ara tornem a la fısica. Revisem les lleis fonamentals dels camps electrics i magnetics.
§9.8 Forca exercida sobre una carrega electrica. Considerem una partıcula amb una carregaelectrica q ∈ R (positiva o negativa) que es mou amb una velocitat v sota l’influencia d’uncamp electric E i un camp magnetic B (creat per d’altres carregues i corrents). Aleshores laforca que s’exerceix sobre la carrega ve donada per la formula de Lorentz :
F = q(E + v ×B).
44

§9.9 Les lleis de l’electromagnetisme. Sigui E el camp electric i B el camp magnetic.
• El flux del camp electric a traves d’una superfıcie tancada S es proporcional a la carregaelectrica neta Q que hi ha a l’interior de S. La constant de proporcionalitat s’acostumaa escriure com 1
ε0: ∫
SE · dS =
Q
ε0(Llei de Gauss). (9.1)
Exercici 9.9.1. Proveu que el camp electric (de Coulomb) en un punt P creat per unaunica carrega puntual situada en un punt O es inversament proporcional al quadrat dela distancia entre O i P . Per aixo podeu suposar que aquest camp electric te simetriaesferica respecte de O, es a dir, que la direccio del camp en el punt P ve donada pelvector ~OP .
• La circul.lacio del camp electric al llarg d’una corba tancada C coincideix amb la variaciotemporal del flux del camp magnetic a traves d’una superfıcie S sostinguda per C = ∂S(orientada adequadament):∫
CE · dL =
d
dt
∫S
B · dS (Llei de Faraday). (9.2)
Exercici 9.9.2. Proveu que la circul.lacio d’un camp de Coulomb al llarg de tota cor-ba tancada C es cero. Indicacio: expresseu la parametritzacio de C en coordenadesesferiques.
• El flux del camp magnetic a traves de qualsevol superfıcie tancada S es zero:∫S
B · dS = 0 (absencia de carregues magnetiques). (9.3)
• Si S es una superfıcie amb vora C = ∂S una corba tancada aleshores la circul.laciodel camp magnetic al llarg de C multiplicat pel quadrat de la velocitat de la llum c esigual al flux del vector densitat de corrent j a traves de S dividit per ε0 mes la variaciotemporal del flux del camp electric a traves de S:
c2
∫C
B · dL =1
ε0
∫S
j · dS +d
dt
∫S
E · dS, (Llei d’Ampere modificada per Maxwell).
(9.4)
§9.10 Una aplicacio dels teoremes de Gauss i Stokes a la fısica: Les equacions de Maxwell.
Ara anem a veure com deduir les equacions de Maxwell utilitzant les lleis anteriors.
Exercici 9.10.1. Utilitzant els teoremes de Gauss i Stokes proveu que les lleis de l’electromag-netisme expressades en les equacions (9.1), (9.3), (9.3) i (9.4) son equivalents a les equacionsdiferencials de Maxwell:
• ∇ ·E = ρε0
on ρ es la densitat de carrega;
• ∇ ×E = −∂B∂t ;
• ∇ ·B = 0;
• c2∇×B = jε0
+ ∂E∂t on j es el vector densitat de corrent.
45
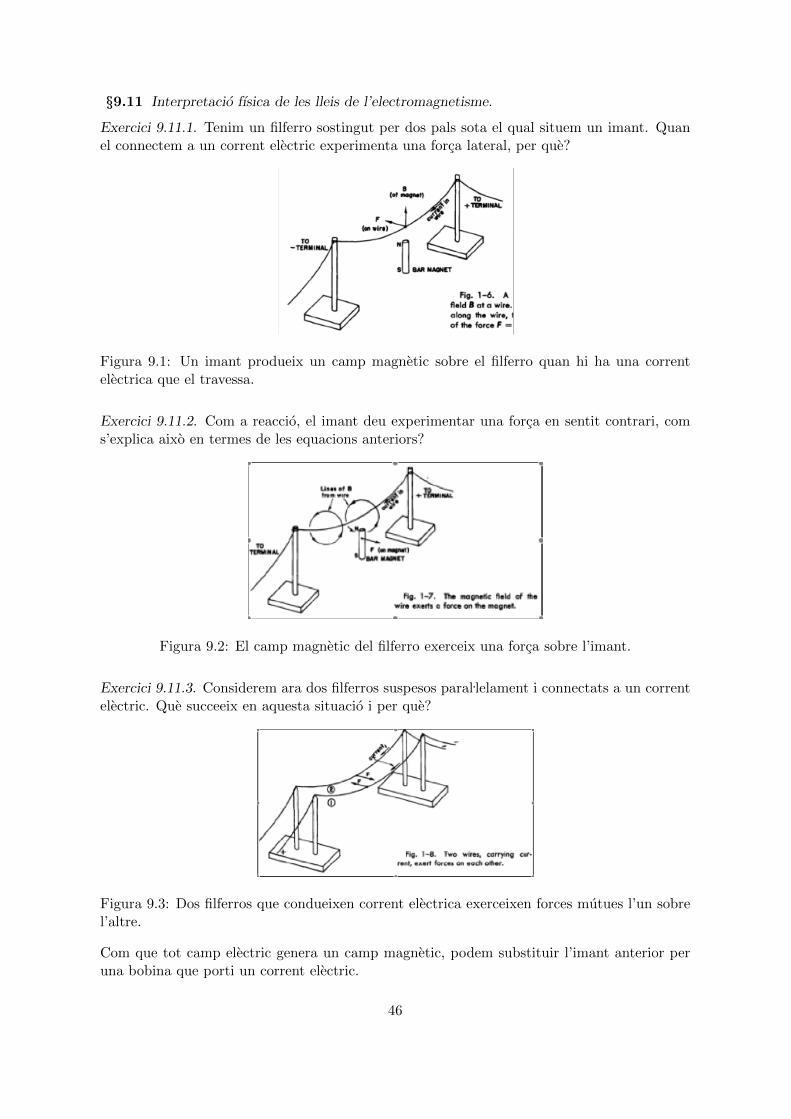
§9.11 Interpretacio fısica de les lleis de l’electromagnetisme.
Exercici 9.11.1. Tenim un filferro sostingut per dos pals sota el qual situem un imant. Quanel connectem a un corrent electric experimenta una forca lateral, per que?
Tour Download 7,349,194 users and counting! Join Now Sign In
Search:
Download Add to Favorites Add to Quicklist
Get Widgets Share File Flag as
Inappropriate
Feynman Complete Lectures on Physics Vol 2--536 Pages
Added to physics;condense... folder on May. 21 2007
Size: 33.2MB
Rate:1 ratings
From physics;condense...folder
Uploaded by: laplacian From Saudi Arabia
Joined on Apr. 14 2007
"great people discuss ideas"
Preparation Gu... Ancient and Mo...
quantum dots.d... Synopsis ahmer...
SYNOPSIS AHMER... thesis on quan...
complete_kbc.f... LECTURE.flv
goong complete... Amviet COMPLET...
Faust complete... Complete Desig...
Go to laplacian's physics;condensedmatter research folder...
Advertise on this site
esnips home | share esnips | Sign In
termodynamique
Karaoke DJs Photography Painting Video Spiritual Poetry Humor See all... ForumCommunities
The Feynman Complete Lectures on Physics Vol 2--536 Pages....Views: 3185
Linear Accelerator Parts
Over 3000 line items in stock, incl
Magnetrons, Thyratrons, Klystrons
www.RadParts.com
Einstein's Method
A Fresh Approach to Relativity & Q.M. - A
scholarly inquiry...
www.einsteinsmethod.com
Related More from this folder
Figura 9.1: Un imant produeix un camp magnetic sobre el filferro quan hi ha una correntelectrica que el travessa.
Exercici 9.11.2. Com a reaccio, el imant deu experimentar una forca en sentit contrari, coms’explica aixo en termes de les equacions anteriors?
Figura 9.2: El camp magnetic del filferro exerceix una forca sobre l’imant.
Exercici 9.11.3. Considerem ara dos filferros suspesos paral.lelament i connectats a un correntelectric. Que succeeix en aquesta situacio i per que?
Figura 9.3: Dos filferros que condueixen corrent electrica exerceixen forces mutues l’un sobrel’altre.
Com que tot camp electric genera un camp magnetic, podem substituir l’imant anterior peruna bobina que porti un corrent electric.
46

El segon terme del segon membre de l’equacio (9.4) va ser descobert de manera teorica perMaxwell i es de gran importancia. Diu que els camps electrics variables produeixen efectesmagnetics. Aixo es posa de relleu en la seguent situacio:
Exercici 9.11.4. Un condensador esta composat per dues plaques conductores paral.leles. Car-reguem una d’elles mitjancant un corrent que flueix cap a ella al llarg d’un filferro. Consideremla circul.lacio del camp magnetic B generat pel corrent al llarg d’una corba C al voltant delfilferro. Analitzeu l’equacio (9.4) per les dues superfıcies S1 i S2 de la figura 9 sostingudessobre C = ∂S1 = ∂S2 i deduıu que ha d’existir un camp electric E variable en el temps entreles plaques del condensador.
Figura 9.4: La circul.lacio de B al llarg de la corba C ve donada pel corrent que travessa lasuperfıcie S1 o per la variacio del flux de E a traves de la superfıcie S2
La combinacio de les equacions (9.2) i (9.4) te una consequencia remarcable: l’explicacio de laradiacio electromagnetica a grans distancies. Grosso modo la rao es la seguent: suposem queen un cert indret el camp magnetic esta creixent, per exemple per que s’ha produıt un correntsobtat en un filferro. Per l’equacio (9.2) deu haver una circul.lacio del camp electric. Aquestcamp electric que acaba de crear-se produeix un camp magnetic d’acord a l’equacio (9.4) jaque tenim una circul.lacio de B no nul.la. Pero a la seva vegada aquesta nova creacio de campmagnetic ha de produir un nou camp electric i aixı successivament. D’aquesta manera es comels camps electric i magnetic avancen per l’espai buit sense recorrer a cap carrega o correntllevat de la font inicial. La llum visible no son mes que ones electromagnetiques d’una certalongitud d’ona. I vet aquı que gracies a les equacions de Maxwell podem veure’ns els uns alsaltres!
§9.12 Altres aplicacions de Stokes i Gauss a la fısica Altres aplications de Stokes i Gaussa la fısica son l’equacio de la calor.Aixo ho veureu aviat a classe. Podreu esperar?Si no es aixı doneu un cop d’ull a aquest link: http://en.wikipedia.org/wiki/Heat_equation
§9.13 Referencies
• Richard P. Feynman , Robert B. Leighton and Matthew Sands, The Feynman Lectureson Physics, Volume 2, 1964.
• Jerry Marsden and Antony Tromba, Calculo vectorial, Addison-Wesley, 3a edicion, 1991.
47

10 Calcul vectorial amb maple
Comencem carregant el package de calcul vectorialrestart:with(plots):with(Student[VectorCalculus]);
§10.1 Definicio de camps vectorials i calcul de la divergencia i del rotacional. Per definir uncamp vectorial utilitzem la comanda VectorField, per calcular la divergencia Divergence iper calcular el rotacional Curl. Per representar graficament lınies integrals d’un camp utilitzemla comanda FlowLine. Per calcular el gradient d’una funcio utilitzem la comanda Gradient:
F:=VectorField(<x^2,y^2,z^2>);Gradient((x^3+y^3+z^3)/3);Divergence(F);Curl(F);
FlowLine(F,<.11,.12,.13>);
Exercici 10.1.1. Comproveu amb maple les identitats
div (fF) = grad f · F + fdiv F
rot (fF) = grad f × F + frot F.
§10.2 Integrals de lınia i superfıcie. Per calcular l’integral de lınia d’un camp al llarg d’unacorba podem utilitzar directament la comanda LineInt:
F:=VectorField(<1,0>);LineInt(F,Circle(<0,0>,1),output=plot,scaling=constrained);
LineInt(F,Circle(<0,2>,1));
Exercici 10.2.1. Feu una representacio grafica del camp F(x, y) = (y, 0) i calculeu la circulaciode F al llarg de la circumferencia de centre (0, 2) i radi 1 orientada positivament.
Per calcular el flux d’un camp a traves d’una superfıcie podem utilitzar la comanda Flux:
F:=VectorField(<x,y,z>);Flux(F,Sphere(<1,1,1>,1),output=plot,scaling=constrained);
Flux(F,Sphere(<1,1,1>,1));
Exercici 10.2.2. Feu una representacio grafica del camp F(x, y, z) = 1√x2+y2+z2
(x, y, z) i
calculeu el flux de F a traves de l’esfera de centre (1, 1, 1) i radi 1 orientada pel vector normalexterior.
§10.3 Il.lustracio dels teoremes de Green, Gauss i Stokes. Recordeu que el teorema de Greenafirma que
∫∂D(P,Q) · dL =
∫D(∂xQ− ∂yP ) dA.
Exercici 10.3.1. Calculeu l’area d’un dels quatre petals P de la corba donada per r = 3 sin(2θ)en coordenades polars. Utilitzeu el teorema de Green aplicat al camp F(x, y) = (−y, x) percalcular d’una manera alternativa l’area de P .
Recordeu que el teorema de Gauss afirma que∫∂D F · dS =
∫D div F dV .
Exercici 10.3.2. Sigui F(x, y, z) = (x+1, y−1, 1−2z) i S = x2 +y2 = 1, 0 ≤ z ≤ 1 orientadapel vector normal N(x, y, z) = 1√
x2+y2(x, y, 0). Calculeu
∫S F·dS primer directament i despres
triant adequadament dues superfıcies Si, i = 0, 1, tals que S∪S0∪S1 sigui la vora d’un dominiD ⊂ R3, per tal d’aplicar-hi el teorema de Gauss.
48

Exercici 10.3.3. (a) Sigui F(x, y, z) = (x, y, z) el camp radial i D ⊂ R3 una regio solida ambvora S superfıcie regular a trossos. Proveu que el volum de D es igual a V (D) = 1
3
∫S F · dS.
Quina relacio hi trobeu amb el volum d’una piramide?(b) Trobeu un camp vectorial adequat amb divergencia constant no nul.la i apliqueu-li elteorema de Gauss per trobar el volum de la regio delimitada per la superfıcie S parametritzadaper x(u, v) = (2 cosu + cos3 u cos v, cos2 u sin v, 2 sinu + cos2 sinu cos v) amb u ∈
[−π2 ,
π2
]i
v ∈ [0, 2π].
Figura 10.1: Quin es el volum d’aquest “all”?
Recordeu que el teorema de Stokes afirma que∫∂S F ·dL =
∫S rot F ·dS on S es una superfıcie
amb vora ∂S orientada coherentment amb S.
Exercici 10.3.4. Calculeu la circulacio del camp
F(x, y, z) = (3x2y2 + 4 z3x3y + 3x2yz, 2x3y + z3x4 + x3z, 3 z2x4y + x3y)
al llarg de l’el.lipse parametritzada per c(t) = (2 sin t, 2 cos t,− sin t − cos t) directament iaplicant el teorema de Stokes. Feu el mateix amb el camp
F(x, y, z) = (3x2y2 + 4 z3x3y + 3x2yz − y, 2x3y + z3x4 + x3z + x, 3 z2x4y + x3y + y − x).
§10.4 Interpretacio geometrica de la divergencia i del rotacional. Els teoremes de Stokesi Gauss ens permeten donar una interpretacio geometrica del rotacional i la divergencia d’uncamp vectorial. En una primera aproximacio (no del tot correcta) podrıem dir que el rotacionalcontrola com roten o giren les lınies integrals del camp mentre que la divergencia controla comdivergeixen o convergeixen les lınies integrals del camp.
Exercici 10.4.1. Comproveu les seguents afirmacions:
(i) El camp H0(x, y, z) = (1, 0, 0) te rotacional zero i les seves corbes integrals no giren.
(ii) El camp F0(x, y, z) = (−y, x, 0) te rotacional (0, 0, 2) i les seves corbes integrals soncircumferencies horitzontals que giren en sentit positiu respecte del vector (0, 0, 1).
(iii) El camp radial G0(x, y, z) = (x, y, z) te divergencia 3 > 0 i les seves corbes integrals sonsemirectes que s’allunyen de l’origen i per tant divergeixen.
La situacio pero es mes subtil tal i com s’il.lustra a la plana web:
49

http://www.math.umn.edu/~nykamp/m2374/readings/curlsubtle/
http://www.math.umn.edu/~nykamp/m2374/readings/divsubtle/
Exercici 10.4.2. Considereu els seguents camps vectorials en funcio del parametre ε:Hε(x, y, z) = (yε, 0, 0), Fε(x, y, z) = (x2 + y2)ε(−y, x, 0) i Gε(x, y, z) = (x2 + y2 + z2)ε(x, y, z).
(i) Comproveu que rot Hε(x, y, z) = (0, 0,−εyε−1) i calculeu la circulacio de Hε al llarg dela circumferencia c(t) = (a+ r cos t, b+ r sin t, 0), t ∈ [0, 2π].
(ii) Comproveu que rot Fε(x, y, z) = (0, 0, 2(ε + 1)(x2 + y2)ε) i calculeu la circulacio de Fε
al llarg de la circumferencia cα(t) = (cos t, cosα sin t, sinα sin t), t ∈ [0, 2π], fent variar elparametre α ∈ [0, π/2].
(iii) Comproveu que div Gε = (3 + 2ε)(x2 + y2 + z2)ε i calculeu el flux de Gε a traves del’esfera x2 + y2 + z2 = r2 orientada amb el vector normal exterior.
Considereu el camp Fε(x, y) = 1(x2+y2)ε
(x, y) del pla. Anem a calcular les seves corbes integrals
resolent el sistema d’equacions diferencials
dx
dt=
x
(x2 + y2)ε
dy
dt=
x
(x2 + y2)ε
Per aixo observem que si r2 = x2 + y2 aleshores 2r drdt = 2xdxdt + 2y dydt = 2r2−2ε, d’on resultaque r2ε−1dr = dt i per tant
r(t) = (r2ε0 + 2εt)
12ε .
D’altra banda, es comprova facilment que d(y/x)dt = 0, d’on resulta que θ(t) = θ0. Aixı doncs,
la corba integral de Fε passant per (x, y) esta parametritzada per
t 7→ φtε(x, y) =
(x
(1 +
2εt
(x2 + y2)ε
) 12ε
, y
(1 +
2εt
(x2 + y2)ε
) 12ε
).
Exercici 10.4.3. Comproveu amb maple que ddtφ
tε(x, y) = Fε(φ
tε(x, y)).
Fem una animacio de la imatge del cercle de centre (1, 1) i radi 1 per l’aplicacio φtε per ε = 1:
F:=VectorField(<x/(x^2+y^2)^epsilon,y/(x^2+y^2)^epsilon>);
phi:=(epsilon,x,y,t)->[x*(1+2*epsilon/(x^2+y^2)^(epsilon)*t)^(1/2/epsilon),
y*(1+2*epsilon/(x^2+y^2)^(epsilon)*t)^(1/2/epsilon)];
dib:=VectorField(subs(epsilon=1,F),output=plot):
animate(plot,[[op(phi(1,1+cos(s),1+sin(s),t)),s=0..2*Pi]],t=0..1,
background=dib,view=[-2..3,-2..3]);
Feu el mateix per ε = 12 i digueu quina diferencia n’observeu.
Exercici 10.4.4. Sigui Dr el cercle de centre (1, 1) i radi r. Calculeu l’area de φtε(Dr) en funciode t i r per ε = 1 i ε = 1
2 . Indicacio: utilitzeu la tecnica descrita a l’exercici 10.4. Quina
relacio hi trobeu entre limr→0
(A(φtε(Dr))A(Dr)
)i (div Fε)(1, 1)?
50

Exercici 10.4.5. Trobeu el grup uniparametric de transformacions φtε del camp
Fε(x, y, z) =1
(x2 + y2 + z2)ε(x, y, z)
i feu una animacio de φtε(Br) per ε = 1, ε = 32 i ε = 2, on Br denota la bola de centre (1, 1, 1)
i radi r. Calculeu-ne el volum en funcio de t i r i obteniu una relacio analoga a la del casanterior.
§10.5 El camp de Hopf. Considereu el camp vectorial
H(x, y, z) =
(y + xz,−x+ yz,
1
2(1 + z2 − (x2 + y2))
).
Exercici 10.5.1. Calculeu la divergencia i el rotacional de H.
Exercici 10.5.2. Proveu que curvatura κ(x, y, z) de la corba integral t 7→ cxyz(t) de H passantpel punt (x, y, z) es
κ(x, y, z) =2√x2 + y2
1 + x2 + y2 + z2.
Indicacio: calcular κ(x, y, z) =‖c′xyz×c′′xyz‖‖c′xyz‖3
utilitzant que c′xyz = Hcxyz i la regla de la cadena.
Exercici 10.5.3. Comproveu les superfıcies de nivell de la funcio κ(x, y, z) son tors de revolucioi comproveu que H n’es sempre tangent. Indicacio: Comprovar que H ⊥ ∇κ.
Exercici 10.5.4. Proveu que la torsio de tota corba integral de H es nul.la. Deduıu que totesles corbes integrals de H, exceptuant l’eix z, son circumferencies. Aquestes circumferenciesdel tor de revolucio s’anomenen cercles de Villarceau:
http://en.wikipedia.org/wiki/Villarceau_circles
Podem fer una representacio grafica d’alguns d’aquests cercles:
Figura 10.2: El camp de Hopf i alguns cercles de Villarceau. Nusos torics de tipus (1, 1).
51
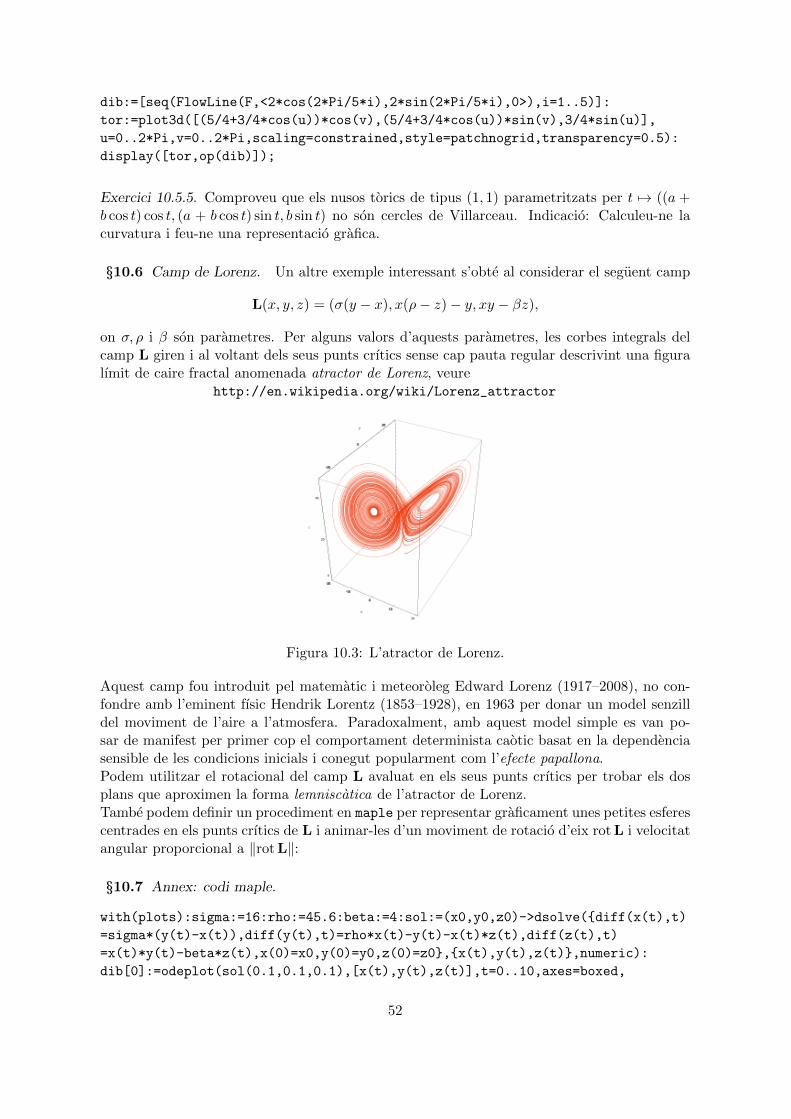
dib:=[seq(FlowLine(F,<2*cos(2*Pi/5*i),2*sin(2*Pi/5*i),0>),i=1..5)]:
tor:=plot3d([(5/4+3/4*cos(u))*cos(v),(5/4+3/4*cos(u))*sin(v),3/4*sin(u)],
u=0..2*Pi,v=0..2*Pi,scaling=constrained,style=patchnogrid,transparency=0.5):
display([tor,op(dib)]);
Exercici 10.5.5. Comproveu que els nusos torics de tipus (1, 1) parametritzats per t 7→ ((a +b cos t) cos t, (a + b cos t) sin t, b sin t) no son cercles de Villarceau. Indicacio: Calculeu-ne lacurvatura i feu-ne una representacio grafica.
§10.6 Camp de Lorenz. Un altre exemple interessant s’obte al considerar el seguent camp
L(x, y, z) = (σ(y − x), x(ρ− z)− y, xy − βz),
on σ, ρ i β son parametres. Per alguns valors d’aquests parametres, les corbes integrals delcamp L giren i al voltant dels seus punts crıtics sense cap pauta regular descrivint una figuralımit de caire fractal anomenada atractor de Lorenz, veure
http://en.wikipedia.org/wiki/Lorenz_attractor
Figura 10.3: L’atractor de Lorenz.
Aquest camp fou introduit pel matematic i meteoroleg Edward Lorenz (1917–2008), no con-fondre amb l’eminent fısic Hendrik Lorentz (1853–1928), en 1963 per donar un model senzilldel moviment de l’aire a l’atmosfera. Paradoxalment, amb aquest model simple es van po-sar de manifest per primer cop el comportament determinista caotic basat en la dependenciasensible de les condicions inicials i conegut popularment com l’efecte papallona.Podem utilitzar el rotacional del camp L avaluat en els seus punts crıtics per trobar els dosplans que aproximen la forma lemniscatica de l’atractor de Lorenz.Tambe podem definir un procediment en maple per representar graficament unes petites esferescentrades en els punts crıtics de L i animar-les d’un moviment de rotacio d’eix rot L i velocitatangular proporcional a ‖rot L‖:
§10.7 Annex: codi maple.
with(plots):sigma:=16:rho:=45.6:beta:=4:sol:=(x0,y0,z0)->dsolve(diff(x(t),t)
=sigma*(y(t)-x(t)),diff(y(t),t)=rho*x(t)-y(t)-x(t)*z(t),diff(z(t),t)
=x(t)*y(t)-beta*z(t),x(0)=x0,y(0)=y0,z(0)=z0,x(t),y(t),z(t),numeric):
dib[0]:=odeplot(sol(0.1,0.1,0.1),[x(t),y(t),z(t)],t=0..10,axes=boxed,
52
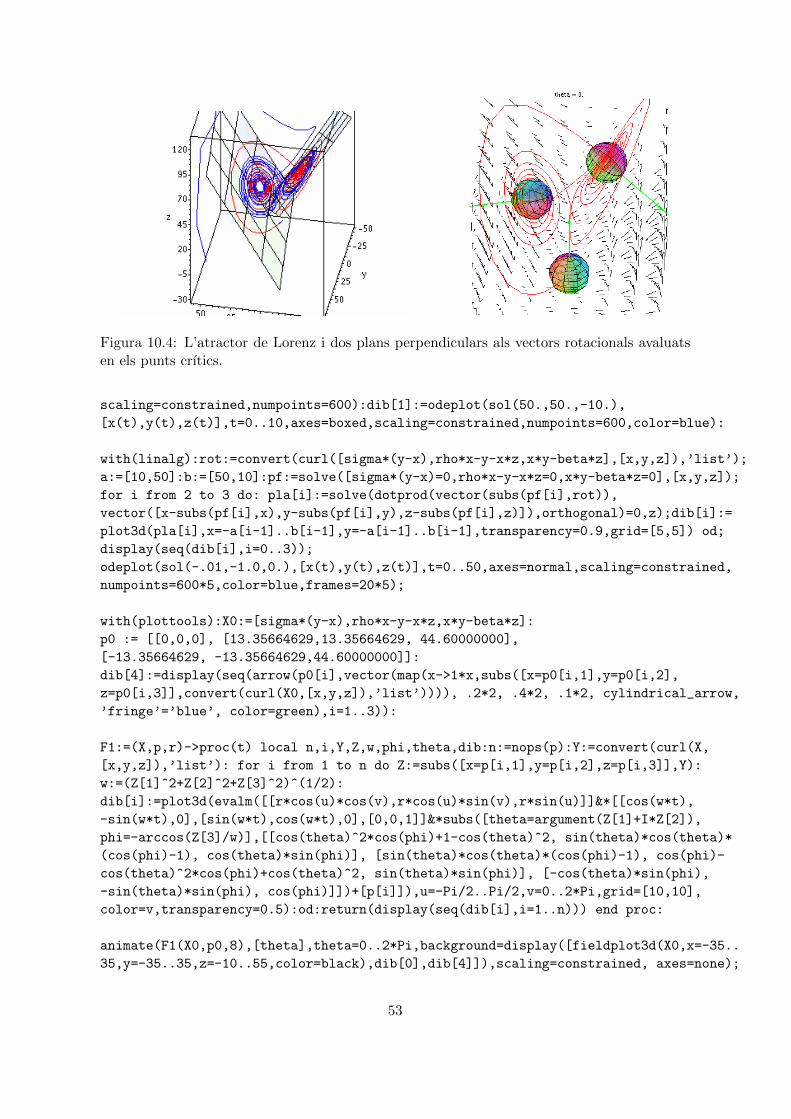
Figura 10.4: L’atractor de Lorenz i dos plans perpendiculars als vectors rotacionals avaluatsen els punts crıtics.
scaling=constrained,numpoints=600):dib[1]:=odeplot(sol(50.,50.,-10.),
[x(t),y(t),z(t)],t=0..10,axes=boxed,scaling=constrained,numpoints=600,color=blue):
with(linalg):rot:=convert(curl([sigma*(y-x),rho*x-y-x*z,x*y-beta*z],[x,y,z]),’list’);
a:=[10,50]:b:=[50,10]:pf:=solve([sigma*(y-x)=0,rho*x-y-x*z=0,x*y-beta*z=0],[x,y,z]);
for i from 2 to 3 do: pla[i]:=solve(dotprod(vector(subs(pf[i],rot)),
vector([x-subs(pf[i],x),y-subs(pf[i],y),z-subs(pf[i],z)]),orthogonal)=0,z);dib[i]:=
plot3d(pla[i],x=-a[i-1]..b[i-1],y=-a[i-1]..b[i-1],transparency=0.9,grid=[5,5]) od;
display(seq(dib[i],i=0..3));
odeplot(sol(-.01,-1.0,0.),[x(t),y(t),z(t)],t=0..50,axes=normal,scaling=constrained,
numpoints=600*5,color=blue,frames=20*5);
with(plottools):X0:=[sigma*(y-x),rho*x-y-x*z,x*y-beta*z]:
p0 := [[0,0,0], [13.35664629,13.35664629, 44.60000000],
[-13.35664629, -13.35664629,44.60000000]]:
dib[4]:=display(seq(arrow(p0[i],vector(map(x->1*x,subs([x=p0[i,1],y=p0[i,2],
z=p0[i,3]],convert(curl(X0,[x,y,z]),’list’)))), .2*2, .4*2, .1*2, cylindrical_arrow,
’fringe’=’blue’, color=green),i=1..3)):
F1:=(X,p,r)->proc(t) local n,i,Y,Z,w,phi,theta,dib:n:=nops(p):Y:=convert(curl(X,
[x,y,z]),’list’): for i from 1 to n do Z:=subs([x=p[i,1],y=p[i,2],z=p[i,3]],Y):
w:=(Z[1]^2+Z[2]^2+Z[3]^2)^(1/2):
dib[i]:=plot3d(evalm([[r*cos(u)*cos(v),r*cos(u)*sin(v),r*sin(u)]]&*[[cos(w*t),
-sin(w*t),0],[sin(w*t),cos(w*t),0],[0,0,1]]&*subs([theta=argument(Z[1]+I*Z[2]),
phi=-arccos(Z[3]/w)],[[cos(theta)^2*cos(phi)+1-cos(theta)^2, sin(theta)*cos(theta)*
(cos(phi)-1), cos(theta)*sin(phi)], [sin(theta)*cos(theta)*(cos(phi)-1), cos(phi)-
cos(theta)^2*cos(phi)+cos(theta)^2, sin(theta)*sin(phi)], [-cos(theta)*sin(phi),
-sin(theta)*sin(phi), cos(phi)]])+[p[i]]),u=-Pi/2..Pi/2,v=0..2*Pi,grid=[10,10],
color=v,transparency=0.5):od:return(display(seq(dib[i],i=1..n))) end proc:
animate(F1(X0,p0,8),[theta],theta=0..2*Pi,background=display([fieldplot3d(X0,x=-35..
35,y=-35..35,z=-10..55,color=black),dib[0],dib[4]]),scaling=constrained, axes=none);
53
11 Espai de Minkowski
§11.1 Invariancia de Galileu. Per determinar un punt a l’espai cal donar les seves coorde-nades respecte un sistema de referencies O;x, y, z. Per determinar ‘quan’ existeix aquestpunt donem el seu temps t. Aleshores tot punt ve determinat, respecte un cert sistema decoordenades, per la dada (t, x, y, z). Anomenarem aquest punt esdeveniment. Suposarem quetots els sistemes de referencia O;x, y, z son ortogonals.Es consideren els seguents axiomes (de Newton):
1. Existeix un espai absolut (sistema de referencia absolut) respecte el qual les lleis deNewton son certes.
Definicio. Un sistema de referencia es inercial si esta en moviment relatiu uniformerespecte l’espai absolut.
2. Tots els sistemes de referencia inercial comparteixen un mateix temps universal.
Aclarim la definicio, si O;x, y, z es el sistema de referencia absolut, O′;x′, y′, z′ es inercialsi O′(t) = O0 + tv amb O0 i v constants (al llarg de la practica suposarem, mentre no es diguiel contrari, que O0 = O).
Exercici 11.1.1. Proveu que l’acceleracio d’una partıcula en moviment es invariant respecte elsistema inercial en el que es mesuri.
§11.2 Transformacions de Lorentz. Oblidem el temps universal i l’espai absolut. Conside-rem sistemes de referencia inercialsR iR′ (ara, un respecte de l’altre). Despres de fer rotacionsi translacions suposarem que els eixos son els mateixos en el dos sistemes, que O′ es mou alllarg de l’eix de les z amb velocitat v i que els esdeveniments (t = 0, z = 0) i (t′ = 0, z′ = 0)coincideixen. Es a dir, x = x′, y = y′ i O′ = (0, 0, vt). En aquest cas les coordenades (x, y)dels esdeveniments coincideixen en els dos sistemes de referencies. Ens preocupem nomes deles coordenades t i z i volem veure com es relacionen en aquests sistemes de referencies.Admetrem que:
a) Les transformacions g tals que
(t′
z′
)= g
(tz
)formen un grup.
b) Les transformacions g porten moviments lineals a moviments lineals (es a dir, rectes arectes).
Exercici 11.2.1. Les transformacions de (t, z) a (t′, z′) son de la forma(t′
z′
)=
(γ δβ α
)(tz
)on α, β, γ, δ depenen de la velocitat relativa v
Exercici 11.2.2. Com que (t, vt) es transforma en (t′, 0), deduıu que β = −vα.
Exercici 11.2.3. Com que (t, 0) es transforma en (t′,−vt′) deduıu que β = −vγ. D’aquestexercici i l’anterior es pot concloure que α = γ. Proveu que
g(v) =
(γ δ−vγ γ
).
54

Admetem que la transformacio inversa g(v)−1 ha de ser g(−v) (per que?) i que γ(v) = γ(−v)(ja que γ(v) dona la possible dilatacio temporal que hauria de ser independent del sentit delmoviment).
Exercici 11.2.4. Demostreu a partir d’aquestes afirmacions que γ2 + vδγ = 1.
Per tenir les transformacions g estructura de grup resulta que g · g′ ha de ser del mateix tipus.Llavors els elements diagonals de g · g′ han de ser identics.
Exercici 11.2.5. Deduıu que per valors no nuls de v i v′ es te la relacio
δ(v)
vγ(v)=
δ(v′)
v′γ(v′).
Observem que el denominador mai es zero ja que v 6= 0 implica que γ(v) 6= 0 (proveu aixo!).
Introduım la constant κ = δ(v)vγ(v) que te unitats de velocitat a la menys dos.
Exercici 11.2.6. Veieu que les transformacions son de la forma
g =1√
1 + κv2
(1 κv−v 1
).
Ara hem de decidir el signe de κ.
Exercici 11.2.7. Suposem que κ > 0. Es cosideren transformacions g1 i g2 amb velocitats v1, v2
tals que v1v2 > 1/κ (en principi no hi ha lımit per les velocitats!). Veieu que pot passar queun esdeveniment amb temps t > 0 es tranformi en un esdeveniment amb t < 0.
Aixo es considera fısicament impossible, es el canvi de la causalitat. Nomes tenim dos casos:
1. κ = 0. Tenim les transformacions de Galileu de cinematica newtoniana.
2. κ < 0. Posem c = 1/√−κ que sera una velocitat invariant (constant universal). En
aquest cas ens trobem davant de les transformacions de Lorentz
g =1√
1− v2/c2
(1 −v/c2
−v 1
). (11.1)
Observem que quan v c les transformacions de Galileu son una bona aproximacio de lestransformacions de Lorentz.
Nota: El famos experiment de Michelson-Morley (1887) va demostrar que la velocitat de lallum te una mateixa velocitat respecte qualsevol sistema inercial. La constant c que apareix enles transformacions de Lorentz es aquesta velocitat (299792.458 metres per segon en el buit).
Exercici 11.2.8. Proveu que esdeveniments (t, z1) i (t, z2) que son simultanis en el sistema Rno ho son necessariament en el sistema R′.
§11.3 Adicio de velocitats. Tenim el sistemes de referencia R i R′. Com abans R′ es moua velocitat v en direccio de l’eix z. Suposem que a R′ hi ha un objecte mobil (t′, z′(t′)). Laseva velocitat es w = dz′
dt′ . Volem saber a quina velocitat va vist des del sitema R.
Exercici 11.3.1. Com que
t =1√
1− v2/c2
(t′ +
v
c2z′), z =
1√1− v2/c2
(vt′ + z′
),
55

deduıu que la velocitat des de R esv + w
1 + vw/c2. (11.2)
Aquesta es la formula d’adicio de velocitats. Quan les velocitats son prou petites tenimaproximadament la formula que s’utilitza a la mecanica newtoniana v + w.
Exercici 11.3.2. Proveu, estudiant la funcio F (u, v) = u+v1+uv/c2
que sumant velocitats no podem
passar la velocitat de la llum c.
§11.4 Longitud i temps. En mecanica newtoniana, la longitud d’un objecte es la mateixarespecte qualsevol sistema inercial. Veiem que passa en el mon relativista. Suposem una barraamb inici a (0, z1) i final (0, z1 + L) en el sistema R.
Exercici 11.4.1. Com son aquestes coordenades en R′ a l’instant t′ de R′? Proveu aleshoresque la longitud de l’objecte en el sistema R′ es
L′ =√
1− v2/c2L.
Llavors els objectes en moviment els veiem mes petits que quan estan en repos. Aixo es el ques’anomena contraccio de Fitzgerald-Lorentz.
Considerem ara els esdeveniments (0, 0), (T, 0) al sistema R. L’interval de temps transcorregutes T en el sistema R.
Exercici 11.4.2. Proveu que l’interval de temps en els sistema R′ entre aquests dos esdeveni-ments es
T ′ =1√
1− v2/c2T.
Aixo diu que els rellotges a R′ van mes poc a poc que els rellotges a R (els rellotges mobilsvan mes lents).
§11.5 Simultaneıtat i causalitat. En el pla (t, z), d’una referenciaR, dos esdeveniments A1 iA2 son simultanis si t(A1) = t(A2). Aleshores sobre la recta t = T es troben els esdevenimentssimultanis a temps T . Volem saber com son, vistos a R, els esdeveniments simultanis d’unareferencia R′ de coordenades (t′, z′). Com abans suposem que R′ es mou al llarg de l’eix zamb velocitat v respecte R.
Exercici 11.5.1. Els esdeveniments que son simultanis a R′ en el pla (t′, z′) satisfan t′ = ct.Veieu que a R aquests esdeveniments estan sobre rectes del tipus z = c2t/v + K en el pla(t, z). Observeu que el pendent d’aquestes rectes es major que c (en el pla (z, t)).
Exercici 11.5.2. Demostreu que esdeveniments A1 que son simultanis a R deixen de ser-ho aR′ si v 6= 0.
Exercici 11.5.3. Siguin A1 i A2 esdeveniments amb coordenades (ti, zi) a la referencia R ide manera que t1 < t2 (A1 precedeix en el temps a A2). Estudieu els valors de t′1 i t′2 a lareferencia R′. Sota quines condicions es pot donar que t′1 > t′2 (inversio de la causalitat)? Esaixo possible?
56

§11.6 Interval d’espai temps. Per les transformacions de Galileu es evident que la distanciaespaial (|z1 − z2|) entre dos esdeveniments (t1, z1), (t2, z2) es conserva (exercici).
Exercici 11.6.1. Proveu que si A1 i A2 son dos esdeveniments mesurats en R llavors ∆z′ =z(g(A1))− z(g(A2)) no es necessariament igual a ∆z = z(A1)− z(A2) quan g es de Lorentz.
Volem trobar una magnitud invariant per les transformacions de Lorentz.
Exercici 11.6.2. Proveu que
c2∆t′2 −∆z′2 = c2∆t2 −∆z2.
La quantitatc2∆t2 −∆z2
s’anomena interval d’espai temps.
§11.7 Transformacions de Lorentz. Forma vectorial. Les transformacions (11.1) correspo-nen a un impuls (boost) en la direccio de les z. I son
t′ = γ(t− vz/c2)x′ = xy′ = yz′ = γ(z − vt)
on γ = (1 − v2(c2))−1/2. Es pot demostrar que per un impuls ~v arbitrari (veure el llibre deGirbau p. 238) i sense girar els eixos es te que si ~r = (x, y, z) aleshores
t′ = γ(t− ~r · ~v/c2)
~r′ = ~r +(γ−1v2
(~r · ~v)− γt) (11.3)
on v es la norma euclidiana de ~v i ‘·’ denota el producte escalar.Les transformacions de Lorentz mes generals tambe contenen la rotacio del eixos.
Exercici 11.7.1. Suposem R i R′ sistemes de referencia tals que l’origen de R′ es mou demanera que O′ = O + t~v. Si una partıcula es mou amb velocitat w respecte R′ llavors des deR la velocitat sera:
1
1 + (~v · ~w)/c2
[(~v · ~wv2
+ 1
)~v +
1
γ
(~w − ~v · ~w
v2
)~v
].
Aquesta es la forma vectorial de la formula de composicio de velocitats.
§11.8 Espai (vectorial) de Minkowski L’espai de Minkowski R41 es un espai vectorial real
de dimensio 4 amb una forma bilineal, simetrica, no degenerada amb signatura (+,−,−,−).Una base estandard e0, e1, e2, e3 es aquella que ei · ej = −δij si i, j = 1, 2, 3 i e0 · e0 = 1 ie0 · ei = 0. En una base estandard, la matriu d’aquesta forma es
+1 0 0 00 −1 0 00 0 −1 00 0 0 −1
.
Nota: En certs contexts es considera la signatura (−,+,+,+).
Classifiquem els vectors de R41 segons la seva norma:
57

• Tipus temps si ||v||2 > 0
• Tipus espai si ||v||2 < 0
• Tipus llum (o nul) si ||v|| = 0.
La categoria (temps, espai o llum) en la qual esta un vector s’anomena caracter causal delvector.
Exercici 11.8.1. Demostreu que el conjunt de vectors de tipus llum formen un con, anomenatcon de llum.
Exercici 11.8.2. Si z es un vector tipus temps, el subespai ortogonal z⊥ es tipus espai iR4
1 = 〈z〉+ z⊥.
Un subespai vectorial W ⊂ R41 es de tipus espai si el producte escalar induıt pel producte de
R41 es definit negatiu. Es tipus temps si el producte induıt es no degenerat d’ındex 1. Es tipus
llum si es degenerat.
Exercici 11.8.3. Proveu que W ⊂ R41 es de tipus de tipus temps si i nomes so W⊥ es de tipus
espai. Proveu que W es de tipus espai si i nomes si W⊥ es de tipus temps. Proveu tambe queW es tipus llum si i nomes si W⊥ es tipus llum.
Veiem un criteri per decidir quan un subespai es de tipus temps
Exercici 11.8.4. Per un subespai W ⊂ R41 de dimensio ≥ 2 son equivalents
1. W es de tipus temps (i per tant un espai de Minkowski de dimensio inferior)
2. W conte dos vector nuls linealment independents
3. W conte un vector tipus temps.
Pels subespais de tipus llum tenim
Exercici 11.8.5. Per un subespai W ⊂ R41 son equivalents
1. W es de tipus llum (degenerat)
2. W te un vector nul i cap de tipus temps
3. W ∩ Λ = L \ 0 on L es un subespai de dimensio 1 i Λ es el con de llum.
§11.9 Direccio de temps. Sigui T el conjuntt de vector tipus temps de R41. Per u ∈ T
definim C(u) = v ∈ T : 〈v, u〉 > 0. Es el con de temps que conte u.
Exercici 11.9.1. Proveu que C(−u) = −C(u) i que T = C(u) ∪ C(−u).
Exercici 11.9.2. Proveu que dos vector de tipus temps estan en el mateix con de temps si inomes si 〈u, v〉 > 0.
Posem |v| = |〈v, v〉|1/2.Exercici 11.9.3. Siguin v, w vectors tipus temps. Proveu
1. |〈v, w〉| ≥ |v| · |w|. La igualtat es dona si i nomes si son proporcionals.
2. Si v i w estan en el mateix con de temps, proveu que existeix un ϕ ≥ 0 tal que
〈v, w〉 = coshϕ|v| |w|.
ϕ s’anomena angle hiperbolic entre v i w.
Exercici 11.9.4. Proveu que si u, v estan en el mateix con de temps, aleshores |u|+ |v| ≤ |u+v|.
58

§11.10 Grup de Lorentz. Les transformacions (11.1) relacionaven el temps (t) i l’espai (z)en dos sistemes inercials. Considerem ara les coordenades (ct, z) i posem τ = ct.
Exercici 11.10.1. Aleshores la transformacio es pot escriure com
g =1√
1− v2/c2
(1 −v/c−v/c 1
). (11.4)
Exercici 11.10.2. Demostreu que les transformacions de Lorentz (11.4) en l’espai (τ, z) espoden escriure de la forma (
coshφ ± sinhφ± sinhφ coshφ
). (11.5)
L’‘angle’ φ s’anomena angle hiperbolic.
Considerem ara el grup de transformacions lineals de l’espai de Minkowski de dimensio 2M2
que preserven la forma quadratica x2−y2. Si J =
(−1 00 1
), llavors una matriu A es d’aquest
tipus si i nomes si AtJA = A (per que?).
Exercici 11.10.3. Proveu que les matrius dos per dos d’aquest tipus son totes de la forma(coshφ sinhφsinhφ coshφ
),
(coshφ − sinhφsinhφ − coshφ
),
(− coshφ sinhφ− sinhφ coshφ
),
(− coshφ − sinhφ− sinhφ − coshφ
). (11.6)
Exercici 11.10.4. Son les matrius de (11.5) d’algun d’aquest tipus, per que?
Nota: Les matrius (11.6) formen un grup que es denota per O(1, 1) i es analeg al O(2) peroaquest amb la forma quadratica x2 + y2 (euclidiana).Les matrius de primer i segon tipus en (11.6) preserven la direccio del temps. Mes concretament
Exercici 11.10.5. Siguin (τ, z) i (τ ′, z) esdeveniments i (τ , z) i (τ ′, z) els seus transformats perun element de O(1, 1). Proveu que pels dos primers tipus (τ − τ ′)(τ − τ ′) > 0 i que pels altresdos (τ − τ ′)(τ − τ ′) < 0.
59

12 Formulacio relativista de les equacions de Maxwell
En aquest seminari considerarem l’espai-temps de Minkowski R4 amb una metrica de signatura(+,−,−,−).
§12.1 Quadri-vectors de l’espai de Minkowski. Els quadri-vectors son vectors de R4 talsque quan canviem de sistema de coordenades inercial les seves components canvien segons latransformacio de Lorentz corresponent. L’exemple basic es xµ := (ct, x, y, z) = (ct,x).
Exercici 12.1.1. Proveu que qµ = (qt, qx, qy, qz) es un quadri-vector si i nomes si el campvectorial qt
∂∂t + qx
∂∂x + qy
∂∂y + qz
∂∂z no depen del sistema de coordenades inercial.
Si x(t) = (x(t), y(t), z(t)) es la trajectoria d’una partıcula, definim el seu temps propi coms(t) =
∫‖x′µ(t)‖ dt, on ‖x′µ(t)‖ =
√c2 − x′(t)2 − y′(t)2 − z′(t)2.
Exercici 12.1.2. Proveu que si x(t) = tv es mou de manera rectilınia i uniforme aleshoresdsdt = c
√1− v2/c2.
Exercici 12.1.3. Comproveu que la quadri-velocitat
vµ :=d xµds
= (c√
1− v2/c2,
v√1− v2/c2
)
es un quadri-vector de norma de Minkowski ‖vµ‖ = c.
§12.2 Quadri-vectors energia-moment i treball-forca. Sigui p = mv el moment lineal d’unapartıcula que es mou amb velocitat constant v respecte d’un sistema inercial que suposem enrepos i des del qual mesurem la massa m de la partıcula.
Exercici 12.2.1. Proveu que si pµ := (π,p) es un quadri-vector aleshores m = m0√1−v2/c2
, on
m0 es la massa que mesurarıem si la partıcula estigues en repos. Proveu a mes que π = mc.
Exercici 12.2.2. A partir de l’expressio anterior, admetent que la forca es la derivada delmoment F = d(mv)
dt , i que el treball es la derivada de l’energia F ·v = dEdt , proveu que E−mc2
es constant al llarg de la trajectoria.
Observem que un eventual canvi d’origen en l’energia permet de prendre E = mc2, la celebreformula d’Einstein. Desenvolupant en serie de Taylor en v l’energia E = m0c2√
1−v2/c2= m0c
2 +
12m0v
2 + · · · , veiem que el primer terme no constant es l’energia cinetica classica i el seguent
terme, de l’ordre de v4
c2, es menyspreable per velocitats |v| << c.
Exercici 12.2.3. Comproveu que el quadri-vector energia-moment verifica la igualtat
pµ = (E
c,p) = m0vµ =
d(m0xµ)
ds.
Definim el quadri-vector treball-forca mitjancant fµ =dpµds .
Exercici 12.2.4. Comproveu que fµ = ( F·vc√
1−v2/c2, F√
1−v2/c2) es un quadri-vector.
60

§12.3 Quadri-vectors carrega-corrent i potencial electromagnetic. A partir d’ara suposaremque hem pres unes unitats de mesura de manera que c = 1. Considerem una distribucio decarregues de densitat ρ movent-se amb velocitat constant v mesurat des d’un cert sistemainercial. Recordem que el vector corrent ve definit per j = ρv. Sigui ρ0 la densitat decarrega mesurada en un sistema de referencia que es mogui solidariament amb la distribuciode carregues.
Exercici 12.3.1. Utilitzant la conservacio de la carrega proveu que ρ = ρ0√1−v2 i j = ρ0v√
1−v2 .
Definim el quadri-vector carrega-corrent jµ := (ρ, j) i observem que jµ = ρ0vµ.
Considereu un filferro conductor perfecte no carregat pel que passa un corrent continu constantque genera un camp magnetic B 6= 0 pero cap camp electric E = 0. Sigui S un sistema inercialen el qual el filferro esta en repos. Sigui q una carrega positiva que es mou a la mateixa velocitatv que el corrent del filferro. Sigui S′ un sistema inercial en el que la carrega q esta en repos.
Exercici 12.3.2. Utilitzant la formula de Lorentz F = q(E + v × B), proveu que el campelectric E′ mesurat en el sistema de referencia S′ es diferent de zero. Proveu que la forca queexperimenta la carrega q en S′ es F′ = F√
1−v2 .
Sigui φ(t, x, y, z) el potencial electric i A(t, x, y, z) el potencial magnetic que verifiquen E =−∇φ− ∂A
∂t i B = ∇×A amb la restriccio ∂φ∂t +∇·A = 0. Definim el potencial electromagnetic
Aµ := (φ,A).
§12.4 Quadri-vector gradient i operador dalambertia. Definim el quadri-vector gradient∇µ := ( ∂∂t ,−
∂∂x ,−
∂∂y ,−
∂∂z ) actuant sobre funcions de la manera obvia i sobre quadri-vectors
bµ = (b0, b1, b2, b3) mitjancant
∇µbµ :=∂b0∂t
+∂b1∂x
+∂b2∂y
+∂b3∂z
.
Per que? Veure §25-3 del volum 2 del Feynman.
Exercici 12.4.1. Comproveu que ∇µAµ = ∂φ∂t +∇ ·A = 0 i que ∇µjµ = ∂ρ
∂t +∇ · j = 0.
Definim l’operador dalambertia
2 := ∇µ∇µ =∂2
∂t2− ∂2
∂x2− ∂2
∂y2− ∂2
∂z2.
Exercici 12.4.2. Comproveu que el dalambertia en unes altres coordenades inercials (t′, x′, y′, z′)s’escriu de la mateixa manera, i.e.
∂2
∂t2− ∂2
∂x2− ∂2
∂y2− ∂2
∂z2=
∂2
∂t′2− ∂2
∂x′2− ∂2
∂y′2− ∂2
∂z′2.
Indicacio: Com el laplacia ∇2 = ∂2
∂x2+ ∂2
∂y2+ ∂2
∂z2es invariant per rotacions i translacions
espacials, nomes cal veure la formula anterior pel cas en que t′ = t−ux√1−u2 , x′ = x−ut√
1−u2 , y′ = y i
z′ = z.
Exercici 12.4.3. Proveu que el quadri-vector potencial electromagnetic verifica l’equacio d’ona
2Aµ = jµ/ε0.
Deduıu que Aµ es un quadri-vector.
61

§12.5 La 2-forma electromagnetica. Si escrivim Aµ = (At, Ax, Ay, Az) = (φ,A) resulta queB = ∇×A = (Bx, By, Bz) verifica
Bx =∂Az∂y− ∂Ay
∂z=: Fyz
By =∂Ax∂z− ∂Az
∂x=: Fzx
Bz =∂Ay∂x− ∂Ax
∂y=: Fxy
Tenint en compte que ∂∂t apareix amb signe oposat que ∂
∂x en ∇µ, per simetria podrıem definirtambe
Ftx =∂Ax∂t
+∂At∂x
=∂Az∂t
+∂φ
∂t= −Ex
Fty =∂Ay∂t
+∂At∂y
=∂Az∂t
+∂φ
∂t= −Ey
Ftz =∂Az∂t
+∂At∂z
=∂Az∂t
+∂φ
∂t= −Ez
ja que E = −∇φ − ∂A∂t . Es immediat veure que les definicions analogues per Ftt = Fxx =
Fyy = Fzz = 0 i que Fyx = −Fxy, etc. La definicio condensada de Fµν es la seguent:
Fµν := ∇µAν −∇νAµ.
Exercici 12.5.1. Si (t′, x′, y′, z′) son les coordenades d’un altre sistema inercial tal quet′ = t−ux√
1−u2 , x′ = x−ut√1−u2 , y′ = y i z′ = z proveu que
F ′tx = FtxF ′ty =
Fty−uFxy√1−u2
F ′tz = Ftz−uFxz√1−u2
F ′xy =Fxy−uFty√
1−u2F ′yz = FyzF ′zx = Fzx−uFzt√
1−u2
Exercici 12.5.2. Sigui u el vector velocitat del sistema inercial S′ respecte de S i denotemper v| | i v⊥ les parts paral.lela i perpendicular a u d’un vector qualsevol v. Proveu que elscamps electric i magnetic en en els dos sistemes inercials estan relacionades mitjancant lesexpressions:
E′| | = E| |
E′⊥ = (E+u×B)⊥√1−u2
B′| | = B| |
B′⊥ = (B−u×E)⊥√1−u2
No podem “fabricar” cap quadri-vector a partir dels camps electric i magnetic ni tampoc apartir de les expressions Fµν . En canvi podem considerar la 2-forma electromagnetica seguent:
F :=∑µ,ν
Fµνdµ ∧ dν, amb µ, ν ∈ t, x, y, z.
Exercici 12.5.3. Comproveu que F es invariant per les transformacions de Lorentz.
62

§12.6 Operador ∗ de Hodge i formulacio intrınseca de les equacions de Maxwell. SiguiV un R-espai vectorial de dimensio finita amb una forma bilineal simetrica no degeneradag. Sigui e1, . . . , en una base de V i e1, . . . , en la seva base dual, i.e. ei : V → R ambei(ej) = δij . Escrivim gij = g(ei, ej) i gij l’entrada (i, j) de la matriu inversa de la matriu (gij)
i g := det(gij). Considerem l’espai∧k V ∗ de k-formes sobre V amb base eI := ei1 ∧· · ·∧eik,
on I = (i1, . . . , ik) amb 1 ≤ i1 < · · · < ik ≤ n. Podem escriure qualsevol ω ∈∧k V ∗ com ω =∑
|I|=kωIe
I . Definim ωI =∑|J |=k g
i1j1 · · · gikjkωI . Definim un operador ∗ :∧k V ∗ →
∧n−k V ∗
mitjancant
∗ω :=
√|g|k!
∑|J |=n−k
sg(IJ)ωIeI ,
on
sg(IJ) =
0 si I ∩ J 6= ∅,1 si (IJ) es una permutacio parell de 1, . . . , n,−1 si (IJ) es una permutacio senar de 1, . . . , n.
Es pot comprovar que ∗∗ = (−1)k(n−k)sg(g), on sg(g) es el signe del determinant g de lamatriu (gij).
Exercici 12.6.1. Descriviu explıcitament l’operador ∗ de Hodge per V = R3 amb el producteescalar ordinari, per k = 0, 1.
Exercici 12.6.2. Descriviu explıcitament l’operador ∗ per V = R4 amb el producte de Minkowskiper k = 2 i veieu que es un endomorfisme de quadrat menys identitat.
Exercici 12.6.3. Proveu que les equacions de Maxwell
∇ ·B = 0
∇×E + ∂B∂t = 0
∇ ·E = ρ
∇×B− ∂E∂t = j
es tradueixen endF = 0 i d ∗ F = J
on J es la 3-formaJ =
∑α,β,γ,µ
jµsg(µ, α, β, γ)dxα ∧ dxβ ∧ dxγ .
63

13 De Stokes a De Rham passant per Poincare
§13.1 Relacio entre les integrals de lınia, de superfıcie i sobre cadenes. Recordeu que sic : [0, 1]k → Rn es una k-cadena i ω ∈ Ωk(Rn) es una k-forma es defineix∫
cω :=
∫[0,1]k
c∗ω.
A partir d’ara treballarem en dimensio n = 3.
Exercici 13.1.1. Per k = 1, considerem una 1-cadena c : [0, 1] → R3, c(t) = (x(t), y(t), z(t)),amb imatge C := c([0, 1]) una corba orientada per t = c′
‖c′‖ . Sigui η = a(x, y, z)dx +
b(x, y, z)dy + c(x, y, z)dz una 1-forma i F(x, y, z) = (a(x, y, z), b(x, y, z), c(x, y, z)) el campvectorial associat. Observeu que∫cη =
∫C
F · dL =
∫ 1
0
[a(x(t), y(t), z(t))
dx
dt+ b(x(t), y(t), z(t))
dy
dt+ c(x(t), y(t), z(t))
dz
dt
]dt
es la integral de lınia de F al llarg de C.
Exercici 13.1.2. Proveu que aquesta definicio no depen de la parametritzacio de C.
Exercici 13.1.3. Sigui η = xydx + y2dy + dz i sigui C la corba amb parametritzacio c(t) =(t2, t3, 1) amb t ∈ [0, 1]. Comproveu que
∫C η = 13
21 .
Exercici 13.1.4. Per k = 2, considerem una 2-cadena σ : [0, 1]2 → R3,
σ(u, v) = (x(u, v), y(u, v), z(u, v)),
amb imatge S := σ([0, 1]2) una superfıcie orientada per N = σu×σv‖σu×σv‖ . Sigui ω = A(x, y, z)dy∧
dz+B(x, y, z)dz∧dx+C(x, y, z)dx∧dy una 2-forma i F(x, y, z) = (A(x, y, z), B(x, y, z), C(x, y, z))el camp vectorial associat. Observeu que
∫σ ω es igual a∫
SF · dS =
∫[0,1]2
[A(x(u, v), y(u, v), z(u, v))
∂(y, z)
∂(u, v)+ B(x(u, v), y(u, v), z(u, v))
∂(z, x)
∂(u, v)
+ C(x(u, v), y(u, v), z(u, v))∂(x, y)
∂(u, v)
]du dv
la integral de superfıcie de F a traves de S, on ∂(f,g)∂(u,v) denota el determinant de la matriu
Jacobiana de les funcions f , g respecte u,v.
Exercici 13.1.5. Proveu que la integral de superfıcie no depen de la parametritzacio de lasuperfıcie.
Exercici 13.1.6. Sigui η = z2dx ∧ dy comproveu que si S es la semiesfera unitaria superiororientada amb el vector normal interior, ∫
Sη =
π
2.
Exercici 13.1.7. Calculeu∫S xdy ∧ dz + ydx ∧ dy on S ve donada per la parametritzacio
x = u+ v, y = u2 − v2, z = uv i (u, v) ∈ [0, 1]× [0, 1].
64

§13.2 Relacio entre gradient, rotacional, divergencia i derivada exterior. Siguin (x1, x2, x3)coordenades cartesianes de R3. (En classe de teoria fem servir la notacio xi en lloc de xi.)Recordeu que al seminari anterior ja vam provar les (tres primeres) afirmacions seguents:
1. Si f es una funcio a R3 comproveu que df = g1dx1 + g2dx2 + g3dx3 amb
(g1, g2, g3) = ∇(f) = grad f.
2. Si η = f1dx1 + f2dx2 + f3dx3 llavors
dη = g1dx2 ∧ dx3 + g2dx3 ∧ dx1 + g3dx1 ∧ dx2
amb(g1, g2, g3) = ∇× F = rot F, i F = (f1, f2, f3).
3. Si ω = f1dx2∧dx3 +f2dx3∧dx1 +f3dx1∧dx2 llavors dω = div(f1, f2, f3)dx1∧dx2∧dx3.
4. Proveu que la diferencial de qualsevol 3-forma a R3 es zero.
§13.3 Relacio entre els teoremes classics i el teorema de Stokes generalitzat.
Exercici 13.3.1. Sigui (P (x, y), Q(x, y)) un camp vectorial diferenciable a una regio simpleD ⊂ R2. Deduıu el teorema de Green∫
∂D(P,Q) · dL =
∫D
(∂xQ− ∂yP ) dx dy
a partir del teorema de Stokes generalitzat aplicat a la forma diferencial η = P (x, y)dx +Q(x, y)dy.
Exercici 13.3.2. Sigui S ⊂ R3 una superfıcie, imatge de σ : [0, 1]2 → S, orientada amb vora∂S una corba tancada simple i F(x, y, z) = (a(x, y, z), b(x, y, z), c(x, y, z)) un camp vectorialdiferenciable. Deduıu el teorema de Stokes classic
∫∂S F · dL =
∫S F · dS aplicant el teorema
de Stokes generalitzat a la 1-forma η = a(x, y, z)dx+ b(x, y, z)dy + c(x, y, z)dz.
Exercici 13.3.3. Sigui R ⊂ R3 una regio elemental imatge de ρ : [0, 1]3 → R3 i F(x, y, z) =(A(x, y, z), B(x, y, z), C(x, y, z)) un camp vectorial diferenciable a R. Deduıu el teorema deGauss
∫∂R F · dS =
∫R div F dV aplicant el teorema de Stokes generalitzat a la 2-forma ω =
A(x, y, z)dy ∧ dz +B(x, y, z)dz ∧ dx+ C(x, y, z)dx ∧ dy.
§13.4 Relacio entre formes tancades i formes exactes. Recordeu que una k-forma ω es diutancada si la seva diferencial exterior s’anul.la, i.e. dω = 0, i es diu exacta si existeix una(k − 1)-forma η tal que ω = dη.A partir de la relacio d2 = 0 es dedueix immediatament que tota forma exacta es tancada.Encara que el recıproc en general no es valid sı que ho es si el domini D ⊂ Rn de definicio dela forma tancada es estrellat respecte d’algun punt O ∈ D, i.e. per tot P ∈ D el segment OPesta contingut a D. Aixı ho afirma el lema de Poincare, que dona una expressio explıcita perla (k − 1)-forma
η = I(ω) :=∑
1≤i1<···<ik≤n
n∑α=1
(−1)α−1
(∫ 1
0tk−1fi1···ik(tx)dt
)xiα dxi1 ∧ · · · ∧ dxiα ∧ · · · ∧ dxik
65

en funcio dels coeficients fi1···ik de la k-forma
ω =∑
1≤i1<···<ik≤nfi1···ik(x1, . . . , xn) dxi1 ∧ · · · ∧ dxik ,
prenent O = (0, . . . , 0) ∈ D, cosa que sempre podem suposar fent una translacio convenient.
Exercici 13.4.1. Comproveu que per a tota k-forma ω es verifica la igualtat ω = I(dω) +dI(ω)i deduıu a partir d’aquı el lema de Poincare.
§13.5 Relacio entre formes tancades i topologia. Comprovar que una determinada forma estancada es una questio bastant mecanica, pero assegurar que no es exacta en un domini fixates mes difıcil. A continuacio presentem un criteri que sol ser d’utilitat.
Exercici 13.5.1. Utilitzat el teorema de Stokes sobre varietats, proveu que si M ⊂ Rn es unavarietat de dimensio k sense vora i ω es una k-forma exacta aleshores
∫M ω = 0.
Exercici 13.5.2. Proveu que el camp vectorial definit a R2 \ (0, 0) per
−yx2 + y2
i +x
x2 + y2j
te rotacional zero pero no es pot escriure com el gradient de cap funcio.Indicacio: enuncieu aquest resultat en llenguatge de formes diferencials i apliqueu el criterianterior.
Exercici 13.5.3. Sigui S la superfıcie donada per l’equacio implıcita
(√x2 + y2 − a)2 + z2 = 1, a > 1.
Proveu que S es una varietat regular de dimensio 2 de R3, identifiqueu-la geometricament idoneu l’expressio de una 2-cadena σ : [0, 1]2 → R3 amb imatge S tal que la seva restriccio a(0, 1)2 sigui injectiva.
Exercici 13.5.4. Siguin ω = −yx2+y2
dx+ xx2+y2
dy i η = xz√x2+y2
dx+ yz√x2+y2
dy+(√x2 + y2−a)dz
dues 1-formes diferencials definides a R3 \ x = y = 0 i ı : S → R3 \ x = y = 0 la inclusionatural. Proveu que ı∗ω i ı∗η son tancades. Indicacio: Calculeu σ∗ω i σ∗η.
Exercici 13.5.5. Proveu que per a tots λ, µ ∈ R, la 1-forma ı∗(λω + µη) es tancada pero noexacta. Indicacio: Trobeu una corba tancada C ⊂ S tal que
∫C(λω + µη) 6= 0 i apliqueu el
criteri anterior.
Exercici 13.5.6. Proveu que el conjunt de 1-formes tancades sobre S te estructura d’espaivectorial i que el subconjunt de 1-formes exactes n’es un subespai vectorial.
Definim el k-essim grup de cohomologia de De Rham com el quocient:
HkDR(S) = 1-formes tancades sobre S/k-formes exactes sobre S.
Exercici 13.5.7. Admetent que la dimensio de H1DR(S) es dos, deduıu que [ı∗ω] i [ı∗η] en
formen una base. Proveu tambe que H0DR(S) = R. Es pot comprovar tambe que H2
DR(S) = R.Observeu que χ(S) = dimH0
DR(S)− dimH1DR(S) + dimH2
DR(S).
Es un fet general, que per tota varietatM compacta es compleix quedimM∑k=0
(−1)k dimHkDR(M) =
χ(M).
66

§13.6 Relacio entre formes tancades i analisi complexa. A partir de dues formes diferencialsω, η podem definir una forma diferencial a valors complexos (C) fent ω + iη. La diferencialexterior d’una forma amb valors complexos es defineix de manera C-lineal, i.e. d(ω + iη) =dω + idη i la integral sobre una cadena c mitjancant
∫c(ω + iη) =
∫c ω + i
∫c η.
Centrem-nos en R2 que identifiquem amb C mitjancant (x, y)↔ z = x+ iy. Sigui f : C→ Cuna funcio tal que si escrivim f(x + iy) = u(x, y) + iv(x, y), resulta que u, v : R2 → R2 sondiferenciables.
Exercici 13.6.1. Proveu que d(f(z) dz) = 0 si i nomes si f es holomorfa, on dz = dx + i dy.Indicacio: recordeu que f es holomorfa si i nomes si les seves parts real u i imaginaria vsatisfan les equacions de Cauchy-Riemann:
∂u
∂x=∂v
∂y
∂u
∂y= −∂v
∂x
Exercici 13.6.2. Recordeu com deduıem el teorema integral de Cauchy∫c f(z) dz = 0 per a
tota corba tancada que sigui la vora d’una regio continguda al domini de definicio de f .
Exercici 13.6.3. Sigui f una funcio holomorfa en el disc unitat D = z ∈ C, |z| < 1 i
cr(t) = (r cos t, r sin t), t ∈ [0, 2π], 0 < r < 1. Proveu que∫cr
f(z)z dz no depen de r. Deduıu la
formula integral de Cauchy
f(0) =1
2iπ
∫c
f(z)
zdz
passant al lımit quan r tendeix a zero.
§13.7 Relacio entre formes tancades i enllacos. Aquest apartat es purament d’ampliacio iens remetem als exercicis 5.31, 5.32 i 5.33 del llibre del Spivak per a mes detalls.Considerem la 2-forma de R3 \ (0, 0, 0) definida per
ω =x dy ∧ dz + y dz ∧ dx+ z ∧ dx ∧ dy
(x2 + y2 + z2)32
Exercici 13.7.1. Proveu que ω es tancada,∫S2rω = 4π i deduıu que ω no es exacta. De fet,
ω es pot pensar com l’element d’angle solid sobre l’esfera (l’analeg de la forma dθ sobre lacircumferencia), veieu el problema 5.31 del Spivak.Siguin f, g : [0, 1]→ R3 parametritzacions de dues corbes tancades C,D disjuntes (C∩D = ∅)i σf,g : [0, 1]2 → R3 \ (0, 0, 0) la 2-cadena definida per σf,g(u, v) = f(u) − g(v). La imatgede σ es una superfıcie S amb vora ∂S = C ∪D.Es defineix el nombre d’enllac de C i D com `(f, g) = −1
4π
∫σf,g
ω.
Exercici 13.7.2. Es pot comprovar que `(f, g) nomes depen de les orientacions de C i D i node les parametritzacions utilitzades per definir σf,g.
Exercici 13.7.3. Tambe es pot comprovar que `(f, g) es un nombre enter que mesura l’enllacde les dues circumferencies C i D a R3.
§13.8 Referencies
• Victor Guillemin and Alan Pollack, Differential Topology, Prentice Hall, 1974.
• Jerry Marsden and Antony Tromba, Calculo vectorial, Addison-Wesley.
• Michael Spivak, Calculo en variedades, Reverte.
67

14 Teoremes de Gauss-Bonnet i Poincare-Hopf
Sigui S ⊂ R3 una superfıcie regular orientada, parametritzada per x(u, v) i (x(u, v); e(u, v)),e = (e1, e2, e3) una referencia mobil ortonormal sobre S amb e3 = N. Considerem les 1-formes matricials θ = (θi) i ω = (ωij) tals que dx = eθ i de = eω. Sigui C ⊂ S una corbaparametritzada per l’arc α(s) i denotem per φ(s) l’angle entre el vector tangent t(s) i e1(α(s)).Ja hem observat que
ω12(t(s)) = φ′(s)− kg(s). (14.1)
§14.1 Generalitzacio del umlaufsatz. Exercici 14.1.0. Proveu que si C =n⋃i=1
Ci es una
corba tancada simple de classe C2 a trossos, positivament orientada i amb angle extern φi aCi ∩ Ci+1 aleshores ∑
i
∫Ci
dφ+∑i
φi = 2π.
§14.2 Teorema de Gauss-Bonnet local Sigui C =n⋃i=1
Ci ⊂ S es una corba tancada simple
de classe C2 a trossos i ∆ ⊂ C tal que ∂∆ = C.
Exercici 14.2.1. Utilitzant l’apartat anterior, la relacio (14.1) i el teorema de Stokes proveu elteorema de Gauss-Bonnet local:
n∑i=1
∫Ci
kg(s) ds+
n∑i=1
φi = 2π −∫
∆K dA.
Exercici 14.2.2. Particularitzeu-ho al cas d’un triangle geodesic esferic amb angles internsα1, α2, α3.
§14.3 Teorema de Gauss-Bonnet global. Sigui S una superfıcie regular compacta ambvora ∂S (que pot ser buida). Considerem una triangulacio T = ∆iCi=1 de S amb C cares, Aaristes i V vertexs. Recordem que la caracterıstica d’Euler-Poincare de S es χ(S) = C−A+V .Orientem les aristes de T de manera coherent, i.e. si ∆i ∩∆j = Cij aleshores l’aresta Cij teorientacions oposades als triangles ∆i i ∆j .
Exercici 14.3.1. Utilitzant l’apartat 14 proveu el teorema de Gauss-Bonnet global:∫SK dA+
∫∂Skg ds = 2πχ(S).
Sigui S ⊂ RN una superfıcie compacta sense vora, g un producte escalar arbitrari sobre TS ie = (e1, e2) es una referencia mobil ortonormal sobre S. Denotem per θ1, θ2 la seva base dualde 1-formes sobre S. Aleshores g = θ2
1 + θ22 i dA = θ1 ∧ θ2.
Exercici 14.3.2. Proveu que existeix una unica 1-forma ω12 sobre S tal que dθ1 = θ2 ∧ ω12 idθ2 = −θ1 ∧ ω12.
Per analogia amb el cas en que S ⊂ R3 i g es la primera forma fonamental associada alproducte escalar ordinari de R3, definim la curvatura de Gauss K de S mitjancant la igualtatdω12 = K θ1 ∧ θ2 = K dA i
χm(S, g) :=1
2π
∫SK dA.
68

§14.4 Index d’un camp vectorial sobre una superfıcie. Sigui X un camp vectorial definita un disc tancat D de R2 amb una singularitat aıllada p a l’interior de D (i.e. X(p) = 0) idenotem per φ l’angle que forma X amb la direccio horitzontal. Es defineix l’ındex de X enel punt p com
ind(X, p) =1
2π
∫∂D
dφ.
Exercici 14.4.1. Proveu que l’ındex d’una font i un node X = ±(x + · · · , y + · · · ) es +1 il’ındex d’un punt de sella X = ±(x+ · · · ,−y + · · · ) es −1.
Si X es un camp vectorial tangent a S amb un nombre finit de singularitats definim
χv(S,X) :=∑
X(p)=0
ind(X, p).
Per tota T triangulacio de S considerem els nombres C(T ) de cares, A(T ) d’arestes i V (T ) devertexs i definim
χ∆(S, T ) = C(T )−A(T ) + V (T ).
§14.5 El teorema de Poincare-Hopf. A continuacio provarem el seguent resultat:
Teorema 14.1 (Gauss−Bonnet+Poincare−Hopf). El valor comu
χm(S, g) = χv(S,X) = χ∆(S, T )
no depen de g, X ni T i es coneix com la caracterıstica d’Euler-Poincare χ(S) de S.
Exercici 14.5.1. Comproveu que per tota triangulacio T de S es pot definir un camp vectorialXT tangent a S amb exactament les seguents singularitats:
• una font sobre el baricentre de cada cara de T ;
• un punt de sella sobre el punt mig de cada aresta de T ;
• un node sobre cada vertex de T .
Figura 14.1: Descripcio geometrica del camp vectorial XT .
(Observacio: el camp XT es el gradient de l’alcada sobre el nivell del mar d’una configuraciogeologica amb un cim sobre cada baricentre i una vall sobre cada vertex del planetoide S.)Comproveu que χ∆(S, T ) = χv(S,XT ).
Exercici 14.5.2. Sigui X un camp vectorial tangent a S amb singularitats pjnj=1. Consideremun disc Dj(ε) ⊂ S centrat a pj de radi ε > 0 prou petit per que Di(ε) ∩ Dj(ε) = ∅. Sigui
69

ej = (ej1, ej2) una referencia mobil en Dj(ε) i φj l’angle que forma X amb ej1. Sigui S(ε) =
S \n⋃j=1
Dj(ε). Proveu que
∫S(ε)
K dA =
n∑j=1
∫∂Dj(ε)
ωj12 +
n∑j=1
∫∂Dj(ε)
dφj ,
i passeu al lımit quan ε tendeix a zero per concloure.
Exercici 14.5.3. Il.lustreu el teorema de Poincare-Hopf per l’esfera S = S2, i els camps definitsper X = ∂θ i X = ∂φ en coordenades esferiques. Doneu-ne tambe exemples sobre el torS = S1 × S1.
70

![arXiv:math/0111034v2 [math.CO] 29 Aug 2002pemantle/Summer2009/Library/GDS.pdf · James Propp (propp@math.wisc.edu)∗ Department of Mathematics University of Wisconsin - Madison (Dated:](https://img.pdfslide.net/doc/110x75/60251db93807862896191027/arxivmath0111034v2-mathco-29-aug-2002-pemantlesummer2009librarygdspdf.jpg)

















