Embed Size (px)
Citation preview

GPS Technology
Jackie Van Ryzin, John Hinner,Ryan Maier, and Adam Kabat
Global Positioning Systems
Global Positioning Systems Technology involvesa complex network of
global satellites that utilizes radiosignals and mathematic
calculations to determine the location
of the GPS receiver.
History and Development
• 1964, prior to GPS, there was the Transit system
• Transit had no timing devices and took 15 minutes to calculate a position
• US Department of Defense wanted a more precise method so they spent $12 million on what resulted in GPS
History and Development
• GPS was originally known as the Navstar Global Positioning System
• started in 1973 to reduce the need for other forms of navigational aid
• Overcame many navigational obstacles
• Assisted in many navigational applications
History and Development
• Original use of GPS was for military positioning, navigation, and weapons aiming system to replace Transit.
• It had higher accuracy and stable timing devices on board to achieve precise time transfer
• 1978-1st GPS satellites we launched
• the first products for civilian use were available in the mid 80’s

History and Development
• met the requirement for Full Operational Capability (FOC) as of April 27, 1995
• the first of the currently in-use satellites were launched in February 1989
• the most recent satellite was launched on March 20, 2004
Satellites
Satellite constellation
~ First of GPS satellites launched
in 1978
~ 16 years later,
system up to full power
~ 24 Earth-orbiting
satellites

Satellites
Back-up Satellites~ at least 3 at all times in case of failures~ constantly developing and launching~ too expensive to fix, just replace
Satellites orbit so that at any time, 4satellites are “visible” at any place on Earth

Satellites• Solar-powered
• Rocket boosters keep
them on track/orbit
• complete 2 full rotations
within 24 hours
• 7,000 miles per hour
• 12,000 miles above
the Earth
Radio Waves
• Transmit 2 low power signals (L1 & L2)
• frequency of 1575.42 MHz in the UHF band
• Travel at speed of light
• pseudorandom code, ephemeris data, and almanac data
• Ephemeris data tells satellite status (healthy/unhealthy, current date and time)
• Almanac tells where it should be
Measuring Distance
• Satellite transmits long digital pattern– Individual satellite ID
• Receiver begins running same pattern at same time
• When signal received, the lag or delay notes the time traveled
• Multiply by speed of light to get distance~ this assumes straight line~ no interference
Pseudo-random Code

Measuring Distance
• Satellites and receiver must be in-sync• Synchronize to the nanosecond• Atomic clocks in satellites
– $50,000-$100,000
• Quartz clocks in receivers– Affordable– Constantly resetting to maintain accuracy– Look to four satellites to gauge own
inaccuracy
Synchronization

Trilateration / Triangulation3-D / 2-D
2-D Example
If you are unsure of your location but you know you are 25 miles from point A, you would know that you are somewhere on a circle with radius of 25 miles.
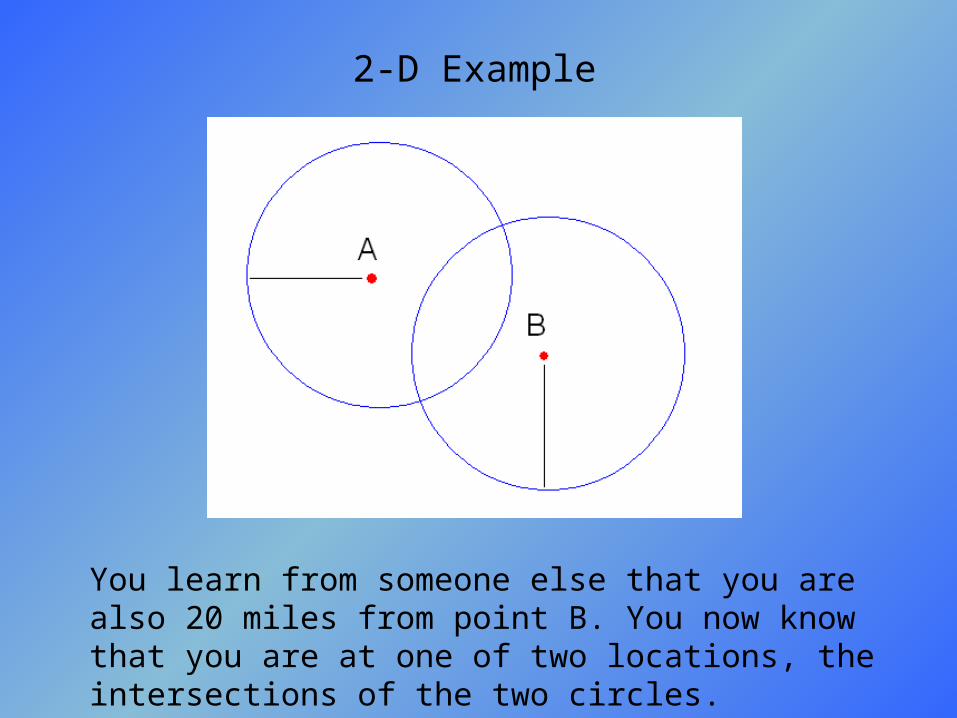
2-D Example
You learn from someone else that you are also 20 miles from point B. You now know that you are at one of two locations, the intersections of the two circles.
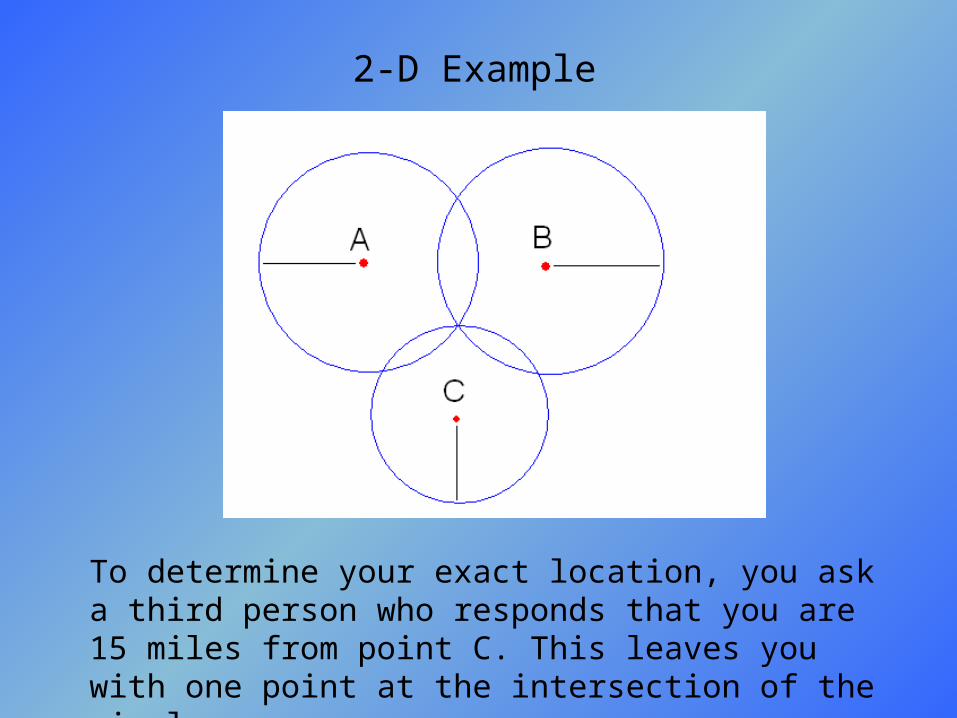
2-D Example
To determine your exact location, you ask a third person who responds that you are 15 miles from point C. This leaves you with one point at the intersection of the circles.
3-D Translation
• Spheres in place of circles
• Two spheres give a perfect circle of possibilities
• Third sphere intersects this circle at two points– Only one of these will be on Earth (feasible)– Eliminate the one in space (infeasible)
Generally receivers will look at four satellites rather than the minimum three
• This offers greater accuracy
• Also helps in determining altitude
Differential GPS• Four spheres will not intersect at same point if
measured incorrectly• Distances are proportionally incorrect• GPS receiver adjusts
– Adjusts distances proportionally to intersect– Resets clock to be in-sync based on proportional
inaccuracy– Always adjusting so accuracy is near that of the
atomic clocks in the satellites
• Department of Defense monitors any changes and transmits this to all receivers as part of satellite signal
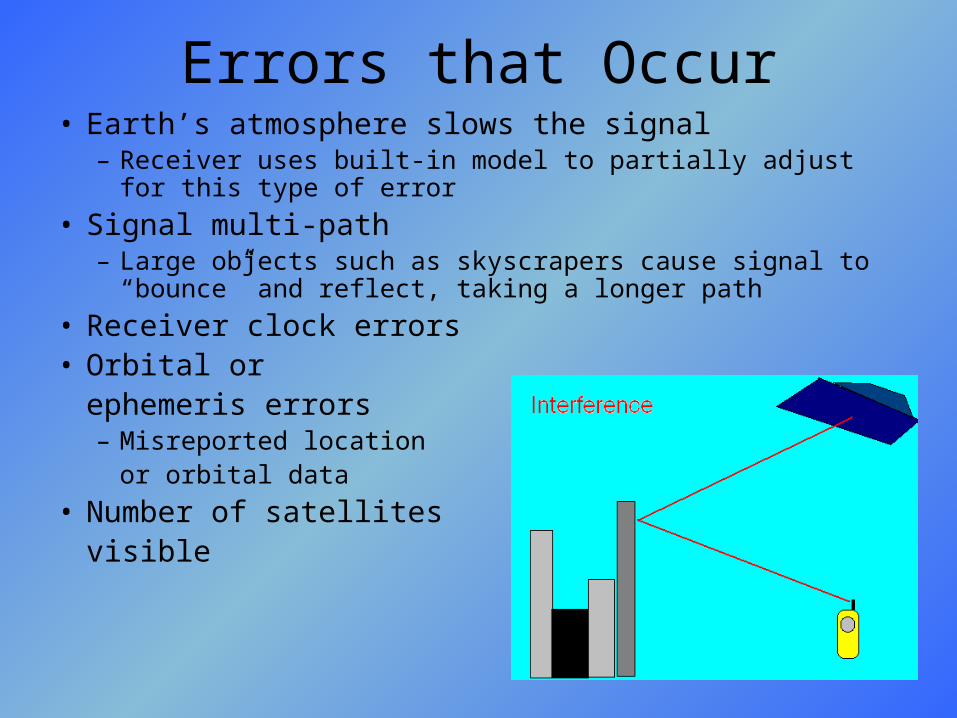
Errors that Occur• Earth’s atmosphere slows the signal
– Receiver uses built-in model to partially adjust for this type of error
• Signal multi-path– Large objects such as skyscrapers cause signal to “bounce” and
reflect, taking a longer path
• Receiver clock errors• Orbital or
ephemeris errors– Misreported location
or orbital data
• Number of satellites visible

Error BudgetSource Uncorrected Error
Level
Ionosphere 0-30 meters
Troposphere 0-30 meters
Measurement Noise
0-10 meters
Ephemeris Data 1-5 meters
Clock Drift 0-1.5 meters
Multi-path 0-1 meters
Selective Availability
0-70 meters
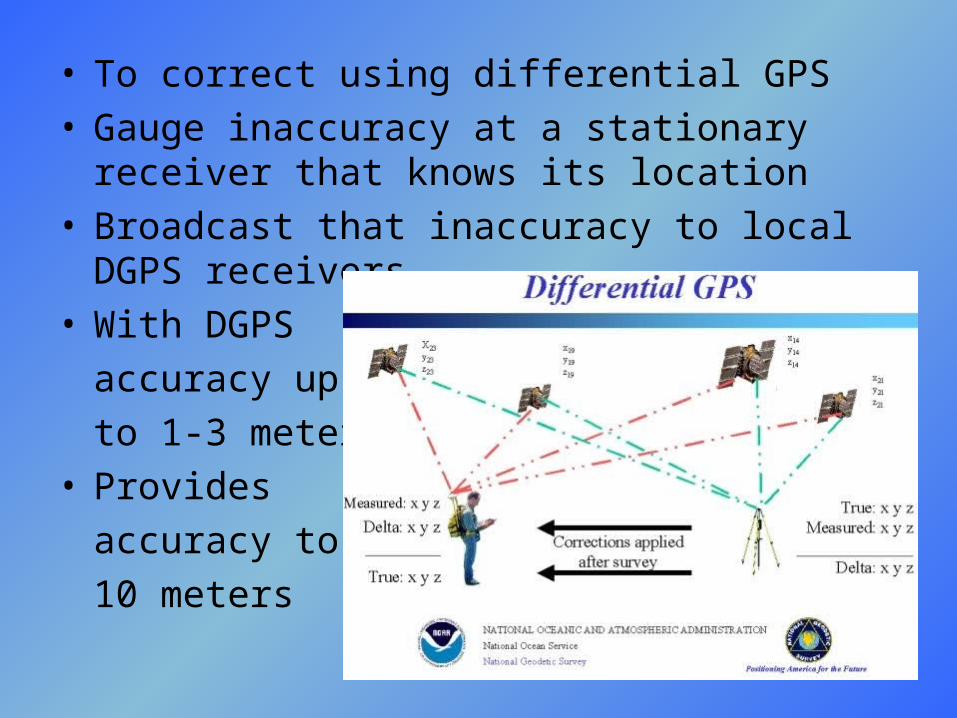
• To correct using differential GPS• Gauge inaccuracy at a stationary receiver that
knows its location• Broadcast that inaccuracy to local DGPS
receivers• With DGPS
accuracy up
to 1-3 meters• Provides
accuracy to
10 meters

Protocol and PC Connections
• Basic link protocol– All data is transferred from the GPS unit
(transmitter) to the PC (host) in byte-oriented packets
– Each packet contains a three-byte header, a number of data bytes, and a three-byte trailer
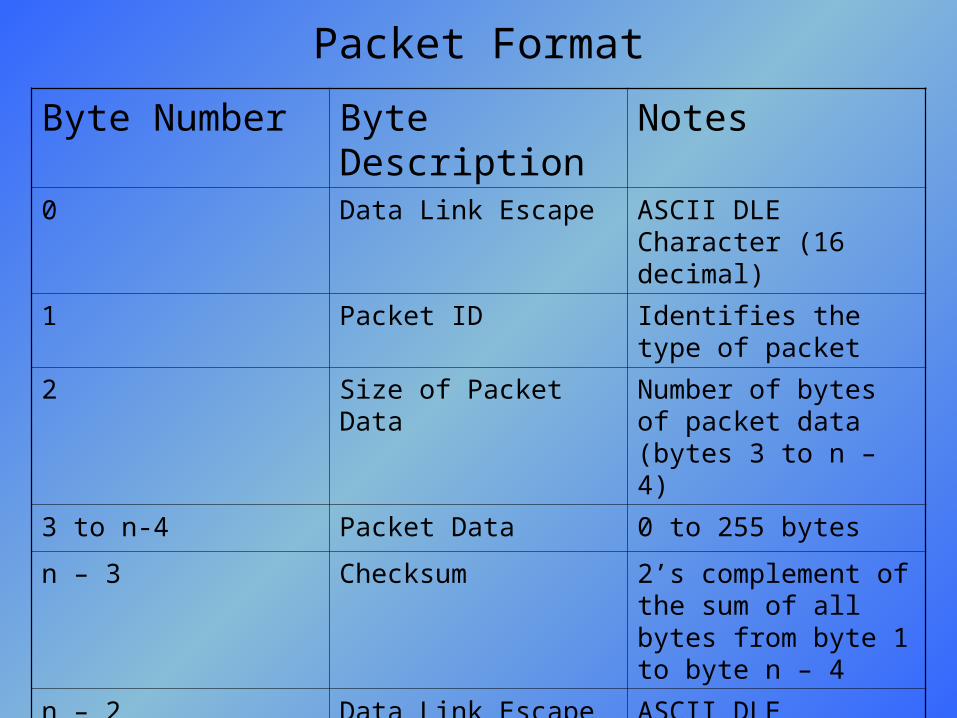
Byte Number Byte Description Notes0 Data Link Escape ASCII DLE Character
(16 decimal)
1 Packet ID Identifies the type of packet
2 Size of Packet Data Number of bytes of packet data (bytes 3 to n – 4)
3 to n-4 Packet Data 0 to 255 bytes
n – 3 Checksum 2’s complement of the sum of all bytes from byte 1 to byte n – 4
n – 2 Data Link Escape ASCII DLE Character (16 decimal)
n - 1 End of Text ASCII ETX Character (3 decimal)
Packet Format
Protocol and PC Connections
– Any device that receives a data packet must send an ACK or NAK packet in turn
– The GPS unit recognizes an ACK from its packet ID of 6 and NAK packet ID of 21
– The checksum protocol in the trailer of every packet allows the receiver to send a NAK if the sum of the data it received is the same as the sum of the data that was sent
– Additional basic packet ID’s are Product Request, which is sent from a host to request product information about the GPS unit that is being currently communicated with, and Product Data, which is sent to a host in return

Application Protocol
• Packets sent to the host are often grouped together during transfers to allow better surveillance of the transfer
• These transfers include standard beginning and end packets of type “records” and “Xfer Complete”
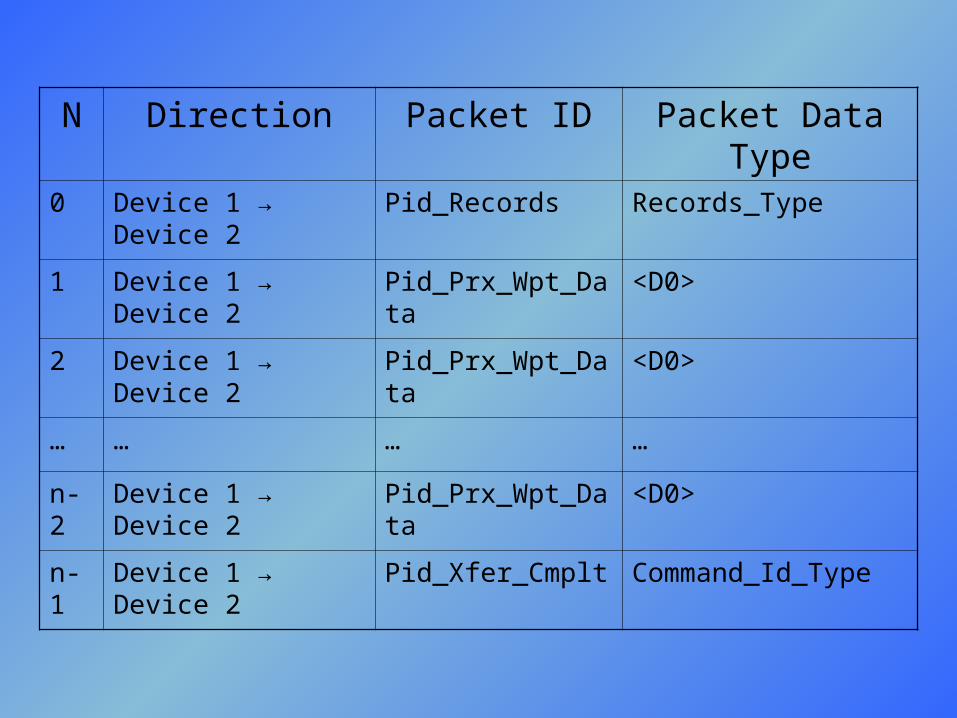
N Direction Packet ID Packet Data Type
0 Device 1 → Device 2 Pid_Records Records_Type
1 Device 1 → Device 2 Pid_Prx_Wpt_Data <D0>
2 Device 1 → Device 2 Pid_Prx_Wpt_Data <D0>
… … … …
n-2 Device 1 → Device 2 Pid_Prx_Wpt_Data <D0>
n-1 Device 1 → Device 2 Pid_Xfer_Cmplt Command_Id_Type
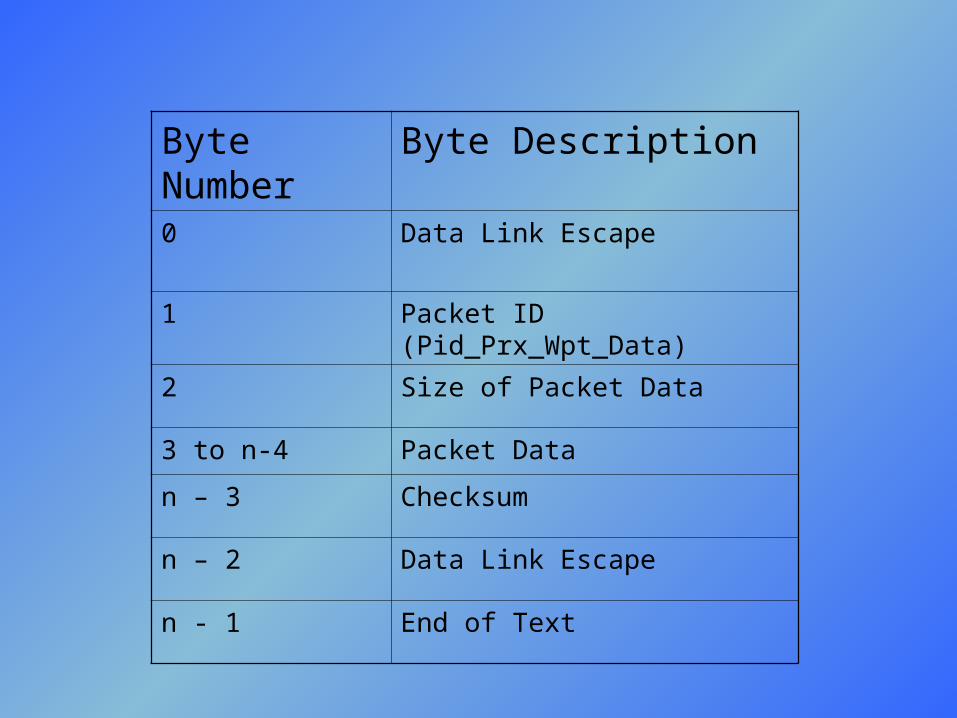
Byte Number Byte Description0 Data Link Escape
1 Packet ID (Pid_Prx_Wpt_Data)
2 Size of Packet Data
3 to n-4 Packet Data
n – 3 Checksum
n – 2 Data Link Escape
n - 1 End of Text

typedef struct
{
char ident[6]; /* identifier */
semicircle_Type posn; /* position */
longword unused; /* should be set to zero */
char cmnt[40]; /* comment */
byte smbl; /* symbol id */
byte dspl; /* display option */
} D103_Wpt_Type;
Experimentations
• Accuracy– Recorded points at 10 minute intervals from one place
to determine the change in the data due to error or inaccuracy
– G:\PANKDC\cs225\projects\gps\Webpage\gps1.rtf
• Unit comparison– We used two different units and compared both of
their tracks to the road map to determine differences between them and accuracy to the actual map.
– G:\PANKDC\cs225\projects\gps\Webpage\gps track.bmp
Experimentations• Number of Satellites
– Recorded data from single place when more satellite signals were achieved to determine the difference in values.
– G:\PANKDC\cs225\projects\gps\Webpage\gps4.bmp– G:\PANKDC\cs225\projects\gps\Webpage\gps3.bmp
• WAAS– WAAS is Wide Area Augmentation System– 25 ground stations, 2 geostationary satellites– Still developing, not available in all areas– Unable to complete experiment, no WAAS satellite
signal received
What GPS can tell you
• Odometer
• Time traveled
• Speedometer
• Average speed
• Trace your path
• Estimate time of arrival at current speed
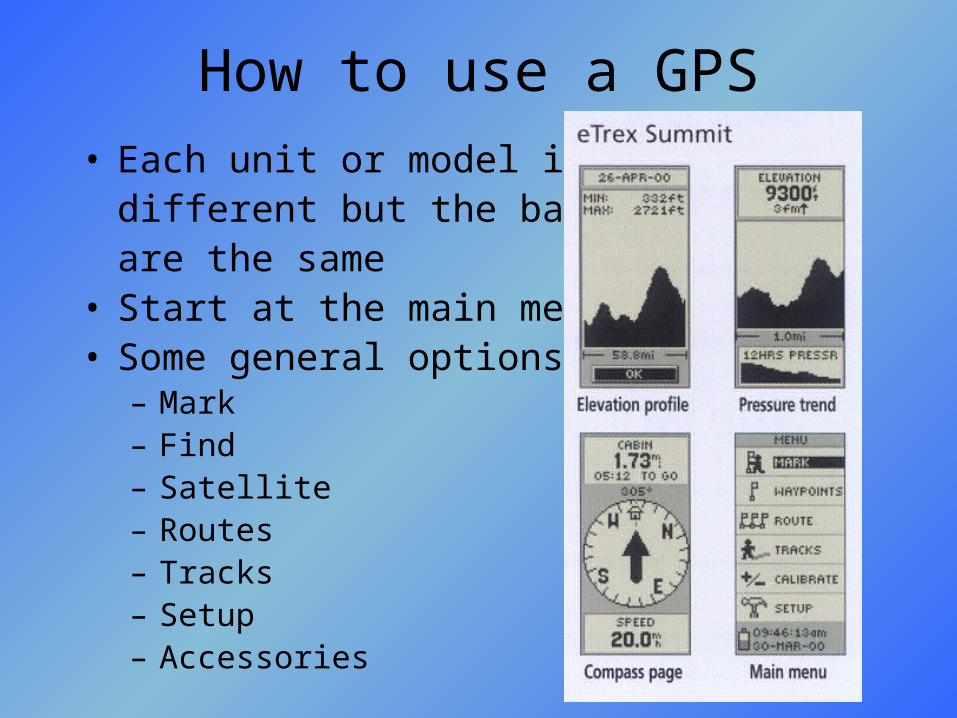
How to use a GPS• Each unit or model is
different but the basics are the same
• Start at the main menu• Some general options:
– Mark– Find– Satellite– Routes– Tracks– Setup– Accessories

Mark
• Shows location: longitude and latitude
• Displays elevation in feet
• Shows the distance you have traveled
• Displays direction you are going (bearing)
Find• Options to find are
– waypoints (that you have marked)– Favorites (that you have saved or marked as
favorite stops)– Cities (saved internally in map, detail depends
on unit and map downloaded)– Exits (services, rest stops, etc.)
• Can find by– Nearest to current location– Name that was given to that point
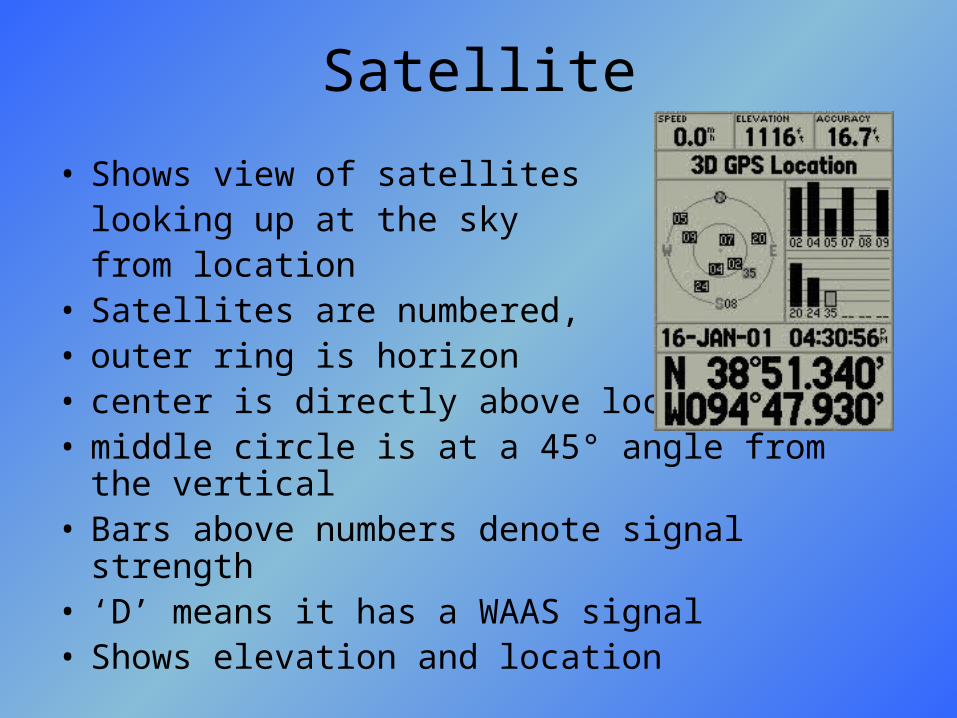
Satellite
• Shows view of satellites looking up at the sky from location
• Satellites are numbered, • outer ring is horizon• center is directly above location• middle circle is at a 45° angle from the vertical• Bars above numbers denote signal strength• ‘D’ means it has a WAAS signal• Shows elevation and location
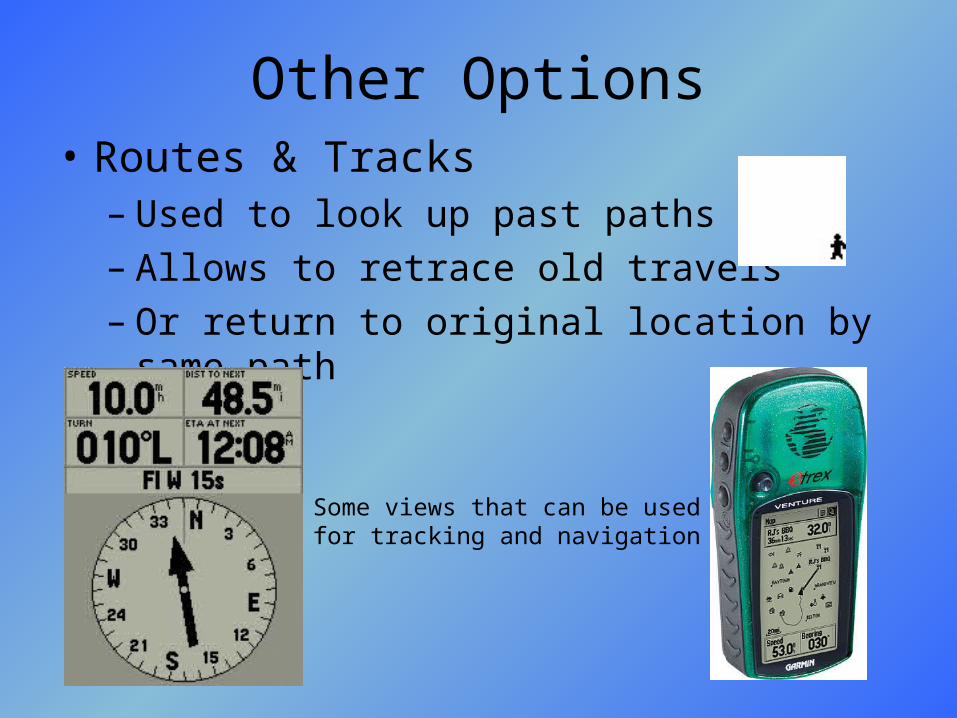
Other Options• Routes & Tracks
– Used to look up past paths– Allows to retrace old travels– Or return to original location by same path
Some views that can be used for tracking and navigation
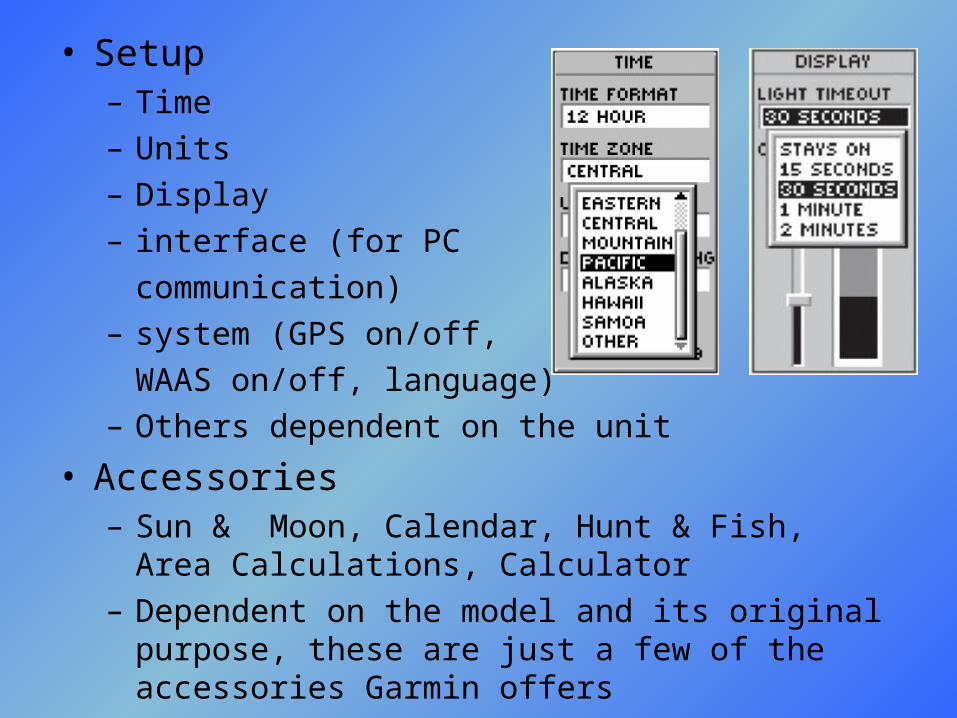
• Setup– Time– Units– Display– interface (for PC
communication)– system (GPS on/off,
WAAS on/off, language)– Others dependent on the unit
• Accessories– Sun & Moon, Calendar, Hunt & Fish, Area
Calculations, Calculator– Dependent on the model and its original purpose,
these are just a few of the accessories Garmin offers
The End
• Thanks for listening
• For more information, view our website which will be available from the CompSci website at www.snc.edu/compsci/cs225F04/ProjectsF04.htmlit is currently available at G:\PANKDC\cs225\projects\gps\Webpage\index.html
• Our webpage includes links to popular GPS websites throughout the explanations