Embed Size (px)
Citation preview

GUIA DE USUARIO
Versión 1.0.24.1r4
1

CONTENIDOS
1 Seguridad1. Introduccion2. Instalacion3. Cableado4. Configuracion5. Primer vuelo6. Problemas y soluciones7. Gracias
2

1. SEGURIDAD
R/C modelos como los helicopteros no son jugetes, es necesario de informarse de toda la documentacion suplemenrada por la manufactora del producto, y proceder de acuerdo con las leyes locales, corregir y arreglar todas las anomalias y danios inmediatamente.
Aspas del rotor y helices circulan a alta velocidad, usandolas incorrectamente pueden causar seriosos accidents y destruir el modelo.
Si encuentran problemas o defectos, ponerse en contacto con su establecimiento proveedor o un modelista experto.
Especialmente preste atencion para su propia seguridad y otras personas, nunca vuele entre gente ó animales ó propiedades privadas sin tener autorizacion.Vuele solamente en lugares donde no pueda causar danios personales ó a propiedades, porque el modelo puede perder el control por varias razones, como rotura de componentes electronicos ó mecanicos, interferencias, ó error del piloto.
No trate de volar un modelo despues de un accidente. Arregle las piezas rotas o cambielas por nuevas.Nunca vuele un modelo con vibraciones, podria perder el control, tambien las caracteristicas de vuelo se empeoran, encontrar la causa de las vibraciones y corregirlo.
SPIRIT no es un autopiloto, es necesario de poseer la abilidad de volar un modelo de R/C, el systema solo mejora el manejamiento.Recomendamos el uso de simuladores designados a entrenamiento antes del primer vuelo.
LOS USUARIOS TIENEN LA COMPLETA RESPONSABILIDAD EN TODO CASO DE ACCIDENTE DE PERSONAS Ó PROPIEDAD.PUESTO QUE A LA MANUFACTORA NO LE ES POSIBLE DE GARANTIZAR EL USO CORRECTO DE LA UNIDAD QUE ESTA SIENDO USADA.
3
2. INTRODUCCION
Spirit es un aparato para estabilizar un modelo de R/C como un helicopter sin aletas de estabilizacion el cual simula electronicamente las aletas mecanicas de estabilizacion y al mismo tiempo el giroscopo del timon.
Gracias a los rotores sin aletas de estabilizacion se ha ahumentado la eficiencia y maneubravilidad del helicoptero, y como consequencia extendiendo el tiempo de vuelo.
Las caracteristicas de vuelo son facilmente adaptadas a sus preferencias, asi como un vuelo muy estabilizado para aprender ó acrobacia professionalcon una agilidad maxima para expertos.
A consequencia de que el SPIRIT usa solo materiales de alta calidad y tecnologia, el modelo puede controlarse con exacta precision inclusive en mal tiempo con vientos fuertes, haciendo maniobras exactas y constantes.
Este manual le ayuda a instalar la unidad en el modelo de una forma correcta, hacer la configuracion, y preparar paso a paso el primer vuelo. Es muy importante d’ajustar todo con mucho cuidado para conseguir un vuelo lo más agradable possible.
Por favor visite nuestra web spiritsystem.com, asi podran actualizar la firmware y software, tambien pueden poner sus preguntas en el Forum.
4

3. INSTALACION
Montar el Spirit juega una parte muy importante en el funcionamiento del modelo.Encontrar una superficie donde las vibraciones sean lo más bajas posible en el chassis, esta posicion es normalmente senialada por la manufactora del modelo para posicionar el giroscopo.
Muy importante es que la unidad debe posicionarse exactamente perpendicular a cada uno de los ejes de rotacion.La unidad puede montarse de dos formas diferentes de acuerdo a su gusto o posibilidades del modelo, es posible:
HorizontalLa unidad se coloca de la parte baja con las conexiones hacia arriba se puede montar a 180° sobre el eje de vuelo, las conexiones pueden apuntar hacia delante ó hacia atras del modelo, la unidad tiene que estar siempre paralela al eje longitudinal del modelo.
5

Vertical
La unidad sera colocada a un lado del chassis de tal manera que las conexiones miren para afuera la Unidad, tambien en este caso puede montarse en 180° en sentido del eje activo, las conexiones pueden estar más cerca de alante ó de detras.
La unidad esta siempre paralela al eje longitudinal del modelo.
Para evitar vibraciones del modelo es necesario de elegir una cinta adhesiva doble apropiada para montar la unidad. Tiene que suprimir las vibraciones causadas por el modelo que pueden ser perjudiciales para la unidad.
Vibraciones pueden surgir por aspas y helices mal balanceadas, tambien por rodamientos gastados, ejes doblados y otras causas mecanicas.
6
4. Cableado
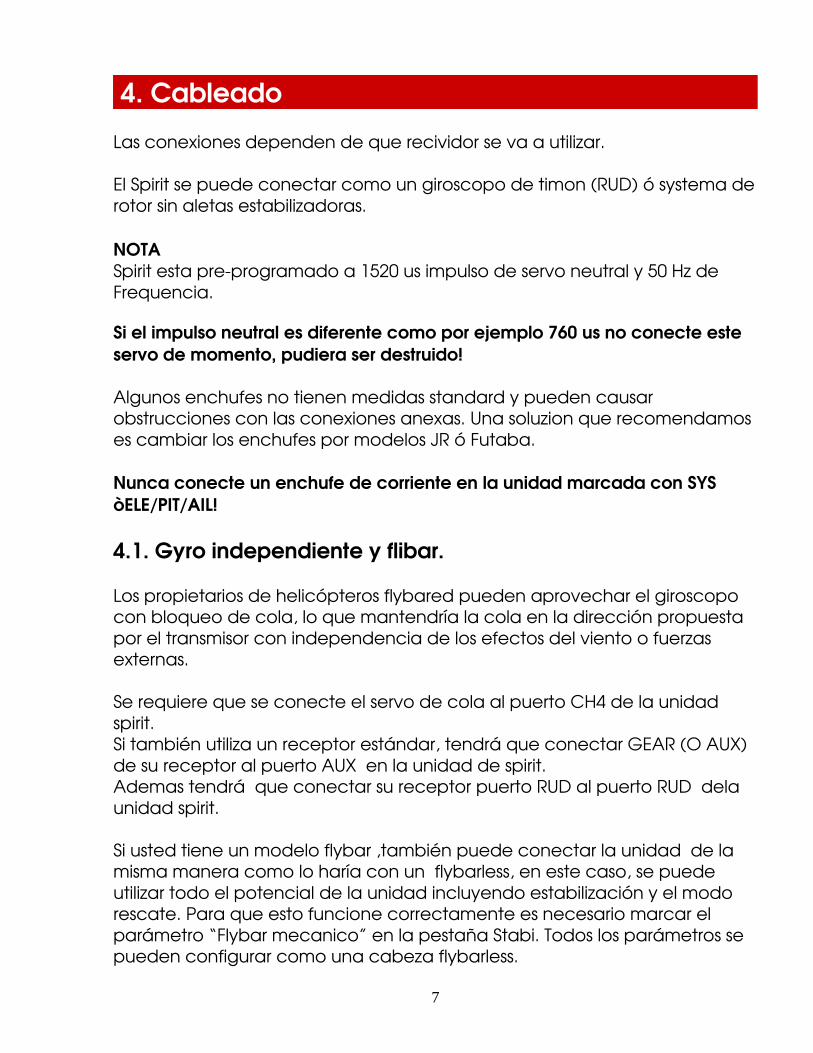
Las conexiones dependen de que recividor se va a utilizar.
El Spirit se puede conectar como un giroscopo de timon (RUD) ó systema derotor sin aletas estabilizadoras.
NOTASpirit esta preprogramado a 1520 us impulso de servo neutral y 50 Hz de Frequencia.
Si el impulso neutral es diferente como por ejemplo 760 us no conecte este servo de momento, pudiera ser destruido!
Algunos enchufes no tienen medidas standard y pueden causar obstrucciones con las conexiones anexas. Una soluzion que recomendamos es cambiar los enchufes por modelos JR ó Futaba.
Nunca conecte un enchufe de corriente en la unidad marcada con SYS òELE/PIT/AIL!
4.1. Gyro independiente y flibar.
Los propietarios de helicópteros flybared pueden aprovechar el giroscopo con bloqueo de cola, lo que mantendría la cola en la dirección propuesta por el transmisor con independencia de los efectos del viento o fuerzas externas.
Se requiere que se conecte el servo de cola al puerto CH4 de la unidad spirit.Si también utiliza un receptor estándar, tendrá que conectar GEAR (O AUX) de su receptor al puerto AUX en la unidad de spirit.Ademas tendrá que conectar su receptor puerto RUD al puerto RUD dela unidad spirit.
Si usted tiene un modelo flybar ,también puede conectar la unidad de la misma manera como lo haría con un flybarless, en este caso, se puede utilizar todo el potencial de la unidad incluyendo estabilización y el modo rescate. Para que esto funcione correctamente es necesario marcar el parámetro “Flybar mecanico” en la pestaña Stabi. Todos los parámetros se pueden configurar como una cabeza flybarless.
7

4.2. FLYBARLESS
los propietarios de helicópteros flybarless pueden tomar ventaja de todas las capacidades de la unidad spirit. El spirit estabilizara el modelo en todos los ejes y también hará que sea menos propenso al viento,extender los tiempos de vuelo y aumentar la agilidad del modelo.Las características de vuelo deberían de ser mas estables y permitirán al piloto llevar a cabo incluso maniobras mas difíciles.
A diferencia de los helicópteros flybar, los servos del cíclico en un helicóptero FBL se conectan mas directamente ala cabeza del rotor y las palas, por lo que la demanda de los servos son significativamente mas altos.Deben ser mas fuertes para hacer frente a esto y también mas rápidos para responder lo mas rápidamente posible a todos los comandos de la unidad spirit enviá.Las palas del rotor flybarless también son diferentes alas diseñadas para los modelos flybar. Por características de vuelo óptimos se recomienda utilizarlas. Cuando se utiliza la unidad spirit como un sistema flybarless, todos los servos deben conectarse en las posiciones correspondientes:
CH1 (aileron) CH2 (elevator) CH3 (aileron/pitch) CH4 (rudder).
Para receptores estándar es necesario utilizar dos cables normales y uno especial. tres conectores se deben conectar en el receptor y el extremo de este cable ala unidad.
8

4.3. CONEXION DEL RECEPTOR ESTANDAR (PWM)
La energia de la unidad se provehe por dos cables conectados al AUX y RUD (Timon).
Nunca conecte un conector para alimentación de la unidad a los puertos SYS o ELE/PIT/AIL.
9

4.4. CONEXION DE SPEKTRUM DSM2/X SATELITE
La conexión a un BEC es opcional. Si el modelo es alimentado por un BEC externo, este debe estar conectado al puerto AUX. En el caso de utilizar un BEC externo, el cable de alimentación desde el BEC interno del ESC debe ser desconectado.
Un segundo satélite también puede ser conectado, pero esto solo se puedelograr a través de un adaptador especial conectado al puerto RUD. Este adaptador esta disponible por separado.Antes de utilizar estos satélites deben vincularse en el transmisor, teniendo en cuenta que el FAILSAFE se deben establecer.Esto se puede lograr mediante la inserción del conector de bind en el puerto SYS cuando se trata de satélites DSM2, o el puerto de ELE/PIT/AIL para satélites tipo DSMX,después apagar y encender la unidad spirit para iniciar el proceso de vinculación. Una vez enlazado con éxito, el LED de STATUS se apaga y el LED vía satélite se encenderá.SI el segundo satélite no puede enlazar , intercambiar los satélites y repita el proceso de vinculación.
Nunca conecte un conector para alimentación de la unidad a los puertos SYS o ELE/PIT/AIL.
10

4.5. CONEXION DE FUTABA SBUS RECEPTOR
NOTASi usan un recividor SBUS es necesario de usar un invertidor, que pueden comprar separadamente. El invertidor replaza los cables entre el recividor y la unidad en la posicion RUD.
Conexion al EC es opcional. Para modelos grandes de la clase 500 hacia arriba recomendamos el uso de cables dobles para la conexion de energia por el incremento de la consupcion lo cual quiere decir que ademas del invertidor un cable adicional debera ser conectado a la posicion AUX.
Nunca conecte un conector para alimentación de la unidad a los puertos SYS o ELE/PIT/AIL.
11
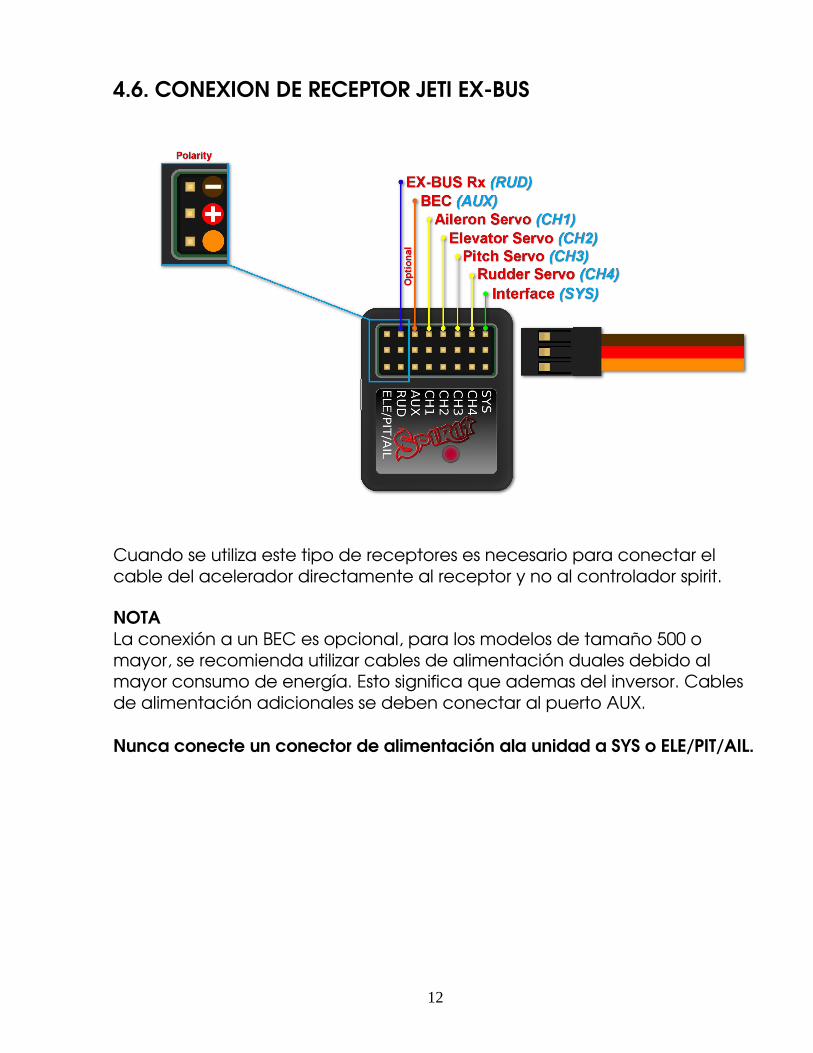
4.6. CONEXION DE RECEPTOR JETI EXBUS
Cuando se utiliza este tipo de receptores es necesario para conectar el cable del acelerador directamente al receptor y no al controlador spirit.
NOTALa conexión a un BEC es opcional, para los modelos de tamaño 500 o mayor, se recomienda utilizar cables de alimentación duales debido al mayor consumo de energía. Esto significa que ademas del inversor. Cables de alimentación adicionales se deben conectar al puerto AUX.
Nunca conecte un conector de alimentación ala unidad a SYS o ELE/PIT/AIL.
12

4.7. CONEXION DEL RECEPTOR PPM.
Cuando se utiliza este tipo de receptores es necesario para conectar el cable del acelerador directamente al receptor y no al controlador spirit FBL.
NOTALa conexión a un BEC es opcional para los modelos de tamaño 500 o mayortamaño, se recomienda utilizar cables de alimentación duales debido al mayor consumo de energía . Esto significa que ademas del inversor, cables de alimentación adicionales se deben conectar al puerto AUX.Es necesario establecer 25ms de latencia marco para su correcto funcionamiento.
Nunca conecte un conector de alimentacion ala unidad SYS o ELE/PIT/AIL.
4.8. UNIDAD
Todos los cables conectados a la unidad deben de estar orientados de modo que el cable de señal (naranja) esta mas cerca de las etiquetas de patillas del conector, hacia el centro de la unidad.
13
5. CONFIGURACION
La configuracion es el proximo paso importante para una funcionalidad correcta del systema.
La configuracion se origina usando el software que conbina la eficiencia y simplicidad, ademas ofreciendo una variedad de parametros ajustables incluyendo opciones avanzadas.
5.1. CONEXION CON EL ORDENADOR
Antes de empezar la configuracion es necesario conectar el sytema con unordenador.Esta conexion permite la, asi llamada (USB Interface) comprendida de un serial convertidor y un cable de interface.Depende del systema de operacion tendra que instalar el convertidor al USBport.
En caso de que la instalacion haya funcionado, normalmente un nuevo virtual com port tiene que ser visible en el organizador de software y aparatos.
MS WINDOWSInstalacion de software. Este proceso sera tratado en la proxima seccion.
APPLE MAC OSCojer e instalar el software de la siguiente URL :
http://spiritsystem.com/dl/driver/SiLabsUSBDriverDisk.dmg
GNU/LINUXNo tiene que instalar nada.
14
5.2. CONEXIONES CON LA UNIDAD
Si usted ya ha conectado el USB interface con el ordenador conecte el otrolado del cable al enchufe del Spirit marcado con SYS.Para establecer una conexion conectar primero la batteria del modelo para poner en marcha el Spirit un BEC, una batteria ó la energia suplementada al recividor pueden ser usadas, normalmente se usan los enchufes marcados RUD ó AUX para pasar la energia a la unidad. El cable central tiene que ser siempre el voltaje positive el asi llamado PLUS (3 15 v.)el voltage soportado.
Nunca conecte un conector para alimentación de la unidad a SYS o ELE/PIT/AIL.
Si la unidad no esta configurada (como por ejemplo una unidad nueva) se recomienda no conectar ningún servo.
5.3. CONFIGURACION Y SOFTWARE INSTALACION
El software es capaz de funcionar en plataformas de MS Windows, Apple Mac OS X, GNU/Linux y Android, si no esta instalada pueden cargarla del Spirit web: spiritsystem .com.
Por favor, carge el software para su plataforma, despues siga con las siguientes indicaciones:
MS WINDOWSPoner en marcha el software. Cargar – instalar y seguir la guia del Wizard.
Si el driver ahun no esta instalada, por favor seleccione en la instaladora, instalar.La instaladora hara todo lo que es necesario para preparar su ordenador para empezar la primera configuracion del software.
La configuracion software puede ser iniciada desde la pantalla ó desde la lista de programas „Spirit Settings”.
APPLE MAC OS XInstalar el software cargada abriendo el fichero DMG. Entonces pase a (content to Applications). La configuracion del software puede ser iniciada desde Applications menu con „settings“.
15

GNU/LINUXExtrair todos los sobres de los archivos cargados como por ejemplo (home directory). La configuracion se puede comenzar desde el nuevo directorio creado en del sobre „settings.sh“.
5.4. CONFIGURACION INICIO DE SOFTWARE
Si las previas indicaciones han sido seguidas y en este momento enciende launidad, una (LED Luz) se encendera, entonces ya puede inicializar el software en el ordenador.
Por favor, inicialize el software, lo puede hacer desde la pantalla ó el directorio donde fue instalada.
NOTEConfiguracion software debera de avrir despues de que la unidad haya sido puesta en marcha (LED encendida) usted puede hacer cualquier cambio de parametros.
La configuracion en vuelo, por razones de seguridad, esta prohibida.
PROBLEMAS CON WINDOWS
Si el software de configuración no puede detectar el puerto COM valido, puede intentar iniciar el software como administrador.Alternativamente comprobar el numero de puerto COM, si el valor es demasiado alto intente de reconfigurar el numero de puerto (dispositivos desilabs) para por ejemplo COM1 – COM4. Para ordenadores portátiles también es digno de desactivar todas las funciones de ahorro de energía USB en el administrador de dispositivos.
16

5.5. USANDO EL SOFTWARE
Despues de haber conectado la unidad de una forma eficaz, todas las posibilidades tendran que ser accesibles, si no, pruebe por ejemplo usar otroPort de comunicacion, reinicializar la software ó desconecte la unidad de laenergia suplementada y repita el procedimiento. Asegurese de que el software sea transferido despues de que la inicializacion esta echa.
5.5.1 CONEXION TAB
Este tab indica el estado de la conexion, le informa de la presente version de la firmware, muestra el numero de serie de la unidad y le permite cambiar el COM port. Adicionalmente les muestra el Wizard para la primera instalacion.
Les recomendamos de utilizar este Wizard, puesto que les acompania durante toda la tarea del iniciamiento en una manera muy facil.
17
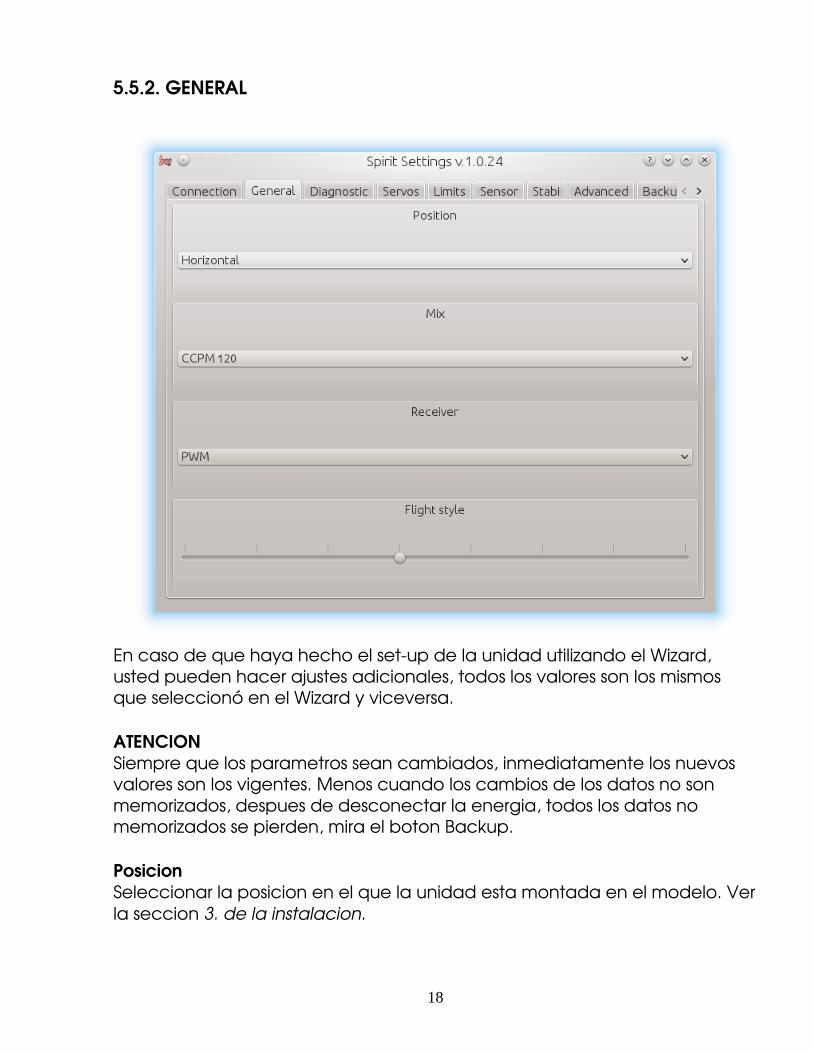
5.5.2. GENERAL
En caso de que haya hecho el setup de la unidad utilizando el Wizard, usted pueden hacer ajustes adicionales, todos los valores son los mismos que seleccionó en el Wizard y viceversa.
ATENCIONSiempre que los parametros sean cambiados, inmediatamente los nuevos valores son los vigentes. Menos cuando los cambios de los datos no son memorizados, despues de desconectar la energia, todos los datos no memorizados se pierden, mira el boton Backup.
PosicionSeleccionar la posicion en el que la unidad esta montada en el modelo. Verla seccion 3. de la instalacion.
18

MixSeleccione la combinacion del plato ciclico de su modelo, en la mayoria de los casos es la CCPM 120°.Todas las mezcladoras del transmisor tienen que ser caducadas y puestas a cero, es necesario de seleccionar el tipo H1.
ReceptorSeleccione el tipo de receptor que va a usar.PWM – Receptor estandard.PPM – conexion de simple linea.Spektrum DSM2/DSMX DSM2/DSMX satelite.Futaba SBUS – receptor conectado a través de SBUS.Jeti EXBUS – receptor conectado a través de EXBUS.
Estilo de VueloAjuste el modelo de como se va a comportar en vuelo, este parametro es usado para adaptar el comportamiento del modelo a las necesidades del piloto.
Valores bajos quieren decir que el modelo se comportara docil y más controlado por la unidad.
Valores altos quieren decir que el modelo se comporta y responde a los movimientos de los mandos similares a las barras estabilizadoras.
Este parametro no afecta la estabilidad del modelo, la mayoria de los pilotos prefieren ajustar el valor a (default – 4).
5.5.3 DIAGNOSE TAB
Si ha terminado con la configuracion de la TAB anterior, le recomendamos hacer los ajustes del transmisor en esta estacion.Cada transmisor es diferente, y el centro de los impulsos de los canals no sonnunca iguales, tambien con el desgasto de materiales y cambio de ambiente pueden causar pequenias desviaciones del centro de los canales.Otro factor es el valor del punto maximo y minimo de cada canal.Tambien pueden ocurrir noticiables variaciones. Por eso ésto software les pone a disposicion estos valores y basicamente pueden equilibrar la unidad con el transmisor para adaptarlos a los requerimientos.
19
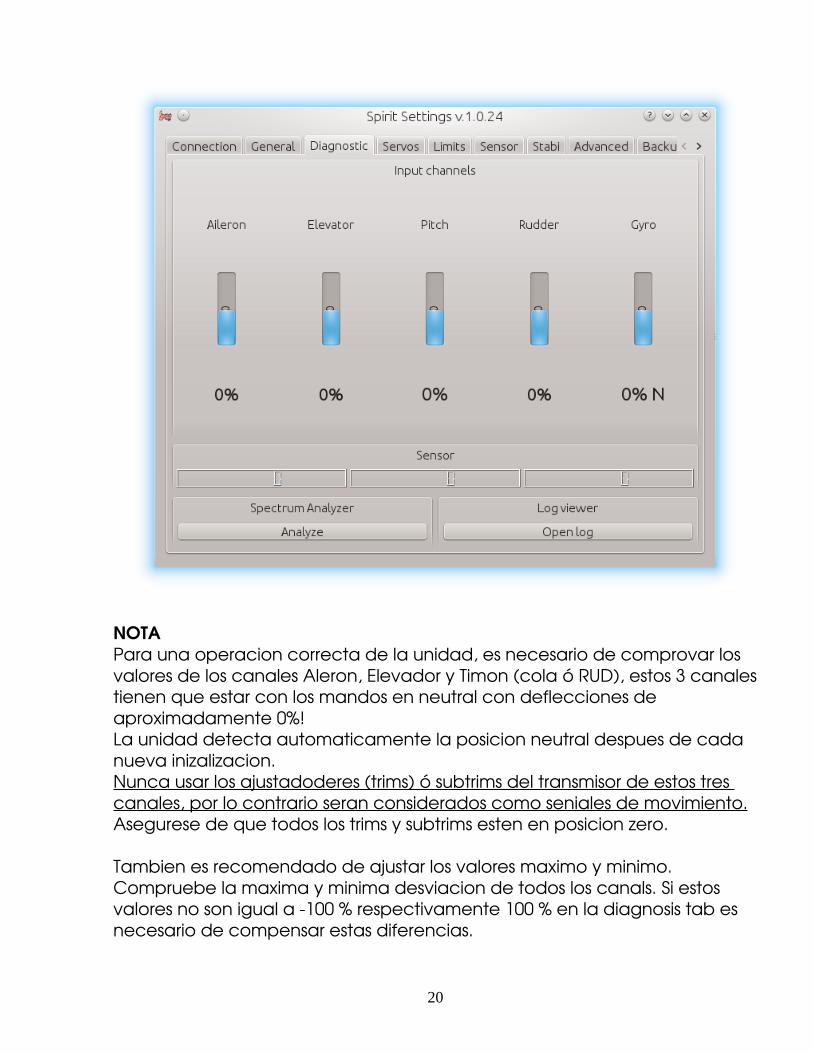
NOTAPara una operacion correcta de la unidad, es necesario de comprovar los valores de los canales Aleron, Elevador y Timon (cola ó RUD), estos 3 canalestienen que estar con los mandos en neutral con deflecciones de aproximadamente 0%!La unidad detecta automaticamente la posicion neutral despues de cada nueva inizalizacion.Nunca usar los ajustadoderes (trims) ó subtrims del transmisor de estos tres canales, por lo contrario seran considerados como seniales de movimiento. Asegurese de que todos los trims y subtrims esten en posicion zero.
Tambien es recomendado de ajustar los valores maximo y minimo.Compruebe la maxima y minima desviacion de todos los canals. Si estos valores no son igual a 100 % respectivamente 100 % en la diagnosis tab es necesario de compensar estas diferencias.
20
Tendra que hacer estos ajustes con las funciones, dual rate y punto final para las dos direcciones.
Adicionalmente a los canales aleron, elevador y timon es necesario de controlar el canal para el paso (pitch) para este canal es admitido de usar la funcion del subtrim para conseguir el punto centro lo más preciso possible. Cuando la linea del paso colectivo esta entre 100% y 100% el centro del mando tendra que indicar 0%.
Despues de esta programacion tiene que estar todo configurado en respecto al transmisor.Pero si algunos canales oxcilan mucho alrededor del centro, esto puede decir que los mandos del transmisor tienen juego, asi como los potenciometros de los mandos. Esto puede ser compensado incrementando la (deadband) que descriviremos en la Advanced tab.
Si usted ve los valores del canal aleron, elevador y timon escritos en (bold) entonces estan reconocidos como commando para mover / girar el eje.
ANALIZADOR DE ESPECTRO.
El analizador de espectro es un instrumento para medir la cantidad de vibraciones en el modelo.Es una herramienta de diagnostico diseñada para determinar que parte giratoria esta causando un problema . Con esta información usted puede identificar fácilmente y solucionar los problemas con su modelo.
Es posible medir las vibraciones en tres ejes separados:• X – elevador axes• Y – aleron axes• Z – timón axes
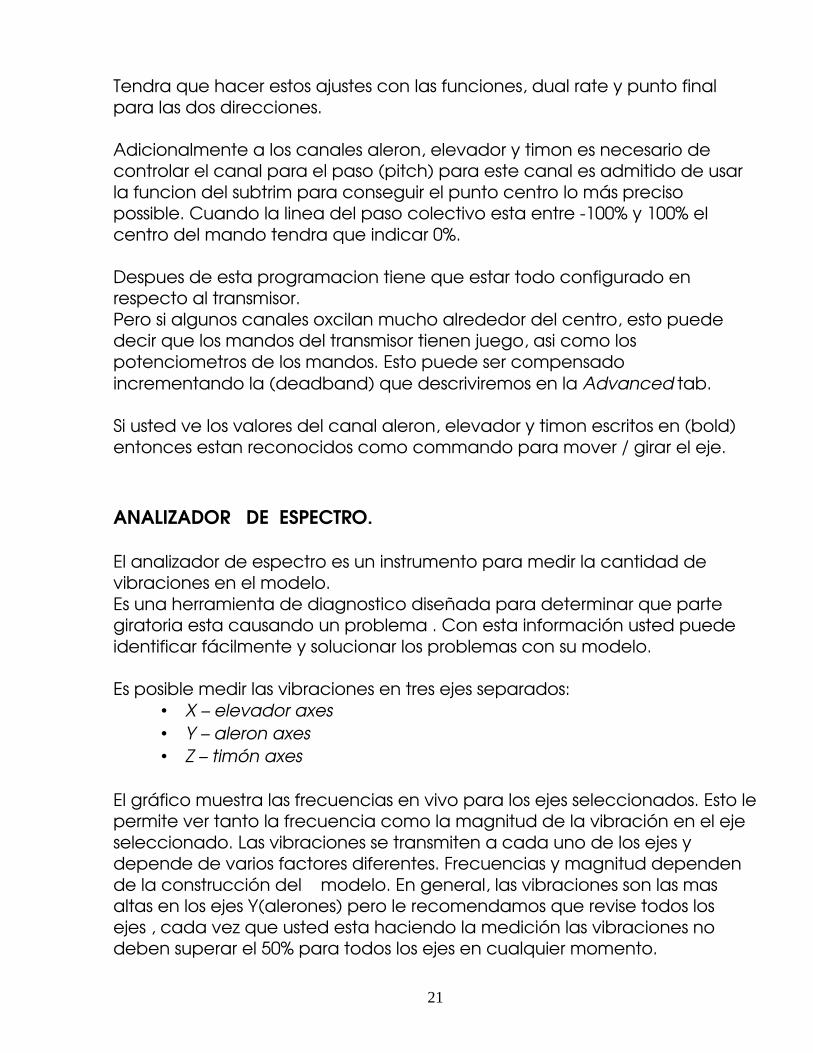
El gráfico muestra las frecuencias en vivo para los ejes seleccionados. Esto lepermite ver tanto la frecuencia como la magnitud de la vibración en el eje seleccionado. Las vibraciones se transmiten a cada uno de los ejes y depende de varios factores diferentes. Frecuencias y magnitud dependen de la construcción del modelo. En general, las vibraciones son las mas altas en los ejes Y(alerones) pero le recomendamos que revise todos los ejes , cada vez que usted esta haciendo la medición las vibraciones no deben superar el 50% para todos los ejes en cualquier momento.
21

En el caso de de que las vibraciones estén en el 90% o mas, el modelo tiene un problema que necesita ser corregido.En caso de que la magnitud supera el 90% en cualquiera de los ejes indicados, se recomienda revisar cualquier tema que este causando estas vibraciones extremas antes de volar el modelo. A pesar de que la unidad spirit FBL es altamente resistente a las vibraciones, estas podrían causar interacciones no deseadas con la unidad spirit FBL y también podría causar una falla mecánica del modelo.Tales vibraciones altas pueden causar loctite falle y otras partes mecánicas pueden romper.
Los niveles de vibración:• las vibraciones hasta un 50% vibraciones a un nivel normal y
aceptable.• Las vibraciones entre el 50% y el 90% niveles vibración planteadas.• Las vibraciones que superen el 90% los niveles de vibración son
extremas.
Asi como los niveles de vibración global no exceda de 50%, cualquier frecuencia especifica (pico) no debe exceder de 50%. Cualquier cosa por encima de este nivel debe ser motivo de preocupación y requiere mayor investigación.
Para comparación de los gráficos, puede utilizar el botón de congelación. Se mostrara el gráfico actual en vivo y el gráfico capturado usando el botón Freeze se guarda y se mostrara como subgrafo. En este gráfico se puede borrar con el boton borrar.
Es posible guardar las gráficas del analizador de espectro utilizando el botónde la imagen a, el gráfico actual se guardara como una imagen.
El analizador de espectro es capaz de detectar las frecuencias de vibraciónde hasta 500Hz (partes que giran a velocidad de hasta 30.000 RPM).
22
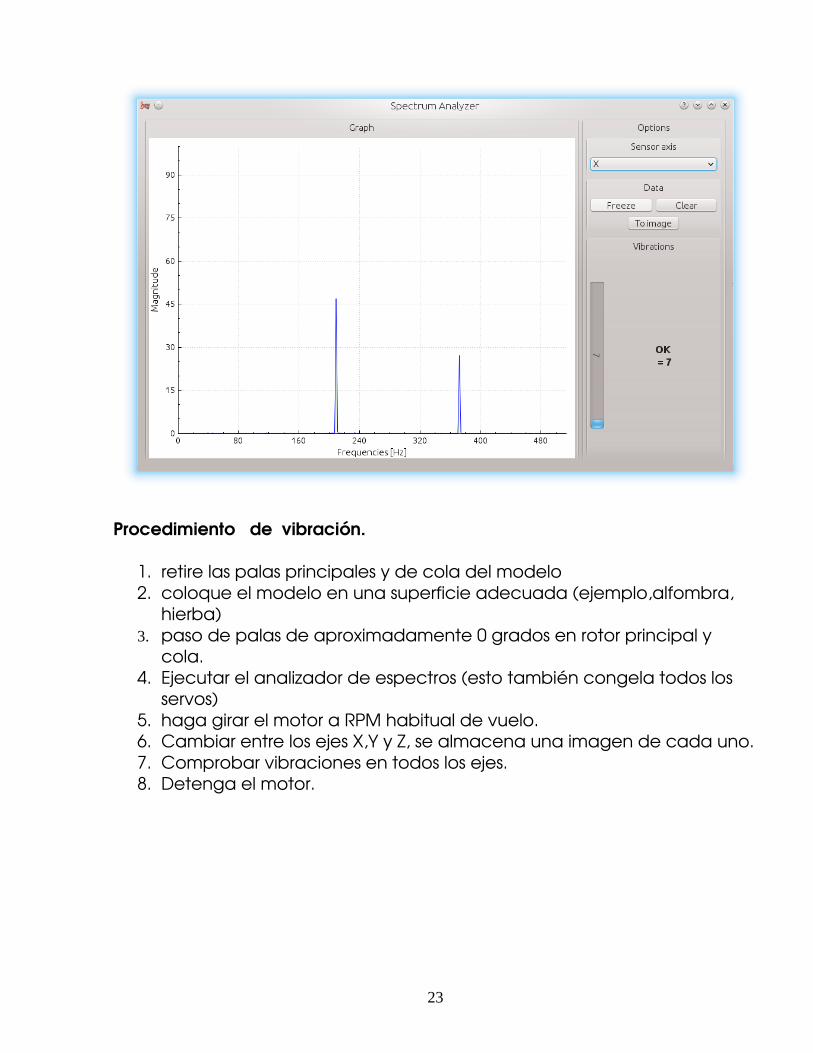
Procedimiento de vibración.
1. retire las palas principales y de cola del modelo2. coloque el modelo en una superficie adecuada (ejemplo,alfombra,
hierba)3. paso de palas de aproximadamente 0 grados en rotor principal y
cola.4. Ejecutar el analizador de espectros (esto también congela todos los
servos)5. haga girar el motor a RPM habitual de vuelo.6. Cambiar entre los ejes X,Y y Z, se almacena una imagen de cada uno.7. Comprobar vibraciones en todos los ejes.8. Detenga el motor.
23
Reconociendo vibraciones.
Para reconocer que componente o pieza es la que esta causando las vibraciones anormales es necesario determinar la velocidad de los picos mas altos. El rotor principal tiene la velocidad mas baja y la velocidad del rotor de cola sera de aproximadamente 4.5x superior. En general, cuanto menor es el tamaño del modelo, mayor sera la velocidad de la cabeza.
Con el fin de averiguar que parte del modelo esta causando las vibracionesno deseadas,mover el cursor a la cima y comprobar la velocidad de la cabeza (RPM). La velocidad del rotor principal es usualmente en el rango de 1.500 a 3500 RPM. Por lo tanto, si la velocidad esta dentro de este intervalo, es probable que hay un problema con el engranaje principal, el eje, los cojinetes del eje principal o cabeza del rotor en si.
La mayoría de las vibraciones excesivas suelen ser, aunque no siempre, relacionadas con cola. Para comprobar si hay vibraciones procedentes en cola se debe encontrar el pico de frecuencia que es aproximadamente 4,5 veces mayor que la frecuencia del rotor principal.
Una vez que identifique que parte del helicóptero esta causando las vibraciones no deseadas , se puede desmantelar gradualmente el conjunto sospechoso., repitiendo el proceso de medición hasta que la vibración desaparece.Una vez que los niveles de vibración se han reducido a un nivel aceptable, usted ha encontrado el componente sospechoso y puede reemplazarlo.
La medición con palas de cola instaladas conlleva algunos problemas de seguridad y también mostraran un aumento de los niveles de vibración.
Visor de registro.
El registro se utiliza para registrar los acontecimientos durante el vuelo. Si se produce un problema y la razón es que no sabe o evidente de inmediato, comprobar el registro puede ayudar a identificar el problema.
Funciona de tal manera que registra varios eventos desde el momento en que la unidad esta encendida. Si se produce un evento se puede ver esto en el registro, la presentación de informes en el registro que se hace cada 10 segundos. Al hacer clic en el botón Abrir registro se puede ver el registro
24

de vuelo actualizado que contiene todos los eventos del ultimo vuelo. Cuando se desconecta la alimentación el registro se borra.
En el caso de un problema importante que ocurre durante el vuelo el registro se guarda de forma permanente a la memoria de la unidad y permanece allí hasta el momento en que se abre el registro.Si existe un registro guardado en la memoria, al usuario se le recomienda con el mensaje “Registro de vuelo anterior esta disponible” Y el registro de vuelo. Cuando se produjo el problema esta abierto . Por ejemplo, cuando una señal se pierde o la fuente de alimentación no pudo encontrar esto en el registro. El registro del primer vuelo donde se produjo el mayor problema siempre se guarda. Si esto no se abre, entonces no va a ser sobrescrito por uno mas nuevo.
El registro puede obtener los siguientes eventos:
mensaje de saludo bueno:el modelo se encuentra en buenas condiciones. La unidad no reconoció ningún problema
calibración terminada:la calibración del sensor se ha realizado correctamente.
Anillo cíclico activado:cíclica alcanzo su máximo angulo de inclinación. Esto indica queel modelo era incapaz de hacer la corrección deseada según sea necesario. En la mayoría de los casos no es relevante. Pero es posible que el valor del parámetro de anillo cíclico es demasiado bajo y el modelo no puede girar tan rápido como sepretende en los ejes de aleron /elevador. Alternativamente, se configura un valor demasiado alto para la velocidad de rotación. También es posible que en vuelo de avance rápido el modelo pueda lanzar rápidamente. Se recomienda ajustar este parámetro tan alto como mecánicamente sea posible.
Alcanzar limite timón:el servo del timón alcanzo su limite configurado. Cuando este evento se produce antes o después de un vuelo no es un problema. Si usted esta en vuelo indica que el timón no funcionacorrectamente. En la mayoría de los casos es visible durante el vuelo como respuesta pobre timón o “apagar”. Si el modelo esta correctamente configurado, entonces podría ser debido a
25
la baja eficiencia del timón, tales como las palas de cola son demasiado cortas o demasiada baja velocidad de cabeza. También existe la posibilidad de un problema mecánico o los limites del timón inadecuados .
Receptor de señal de registro:perdida de señal de repente. Este problema no debería ocurrir en cualquier momento y debe ser resuelto antes del próximo vuelo. Podría haber un problema con el receptor Y/o antenas transmisoras . Podría ser un cable del receptor defectuoso o la conexión entre la unidad y el receptor . En algunos casos, la perdida de señal puede suceder debido a descargas electrostáticas causadas por la acumulación estática, esto ocurre generalmente en helicópteros accionados por correa.
Principal loop cuelgue ocurrió:el bucle principal se retraso. Esto puede suceder cuando el cableado es incorrecto o hay una interferencia anormal de ruido eléctrico con la unidad, por ejemplo, de un BEC. Si se utilizael software de configuración podría significar que el enlace conla unidad spirit FBL es mas lento de lo que debería ser.
Voltaje de la energía es baja:la tensión de alimentación es inferior a 2.9V. Esto significa que tienes que usar BEC que es capaz de manejar cargas mas altas. En casos raros podrían ser conexiones defectuosas en cables.
Todos los registros críticos se guardan como archivos PDF en el escritorios Documents.
26
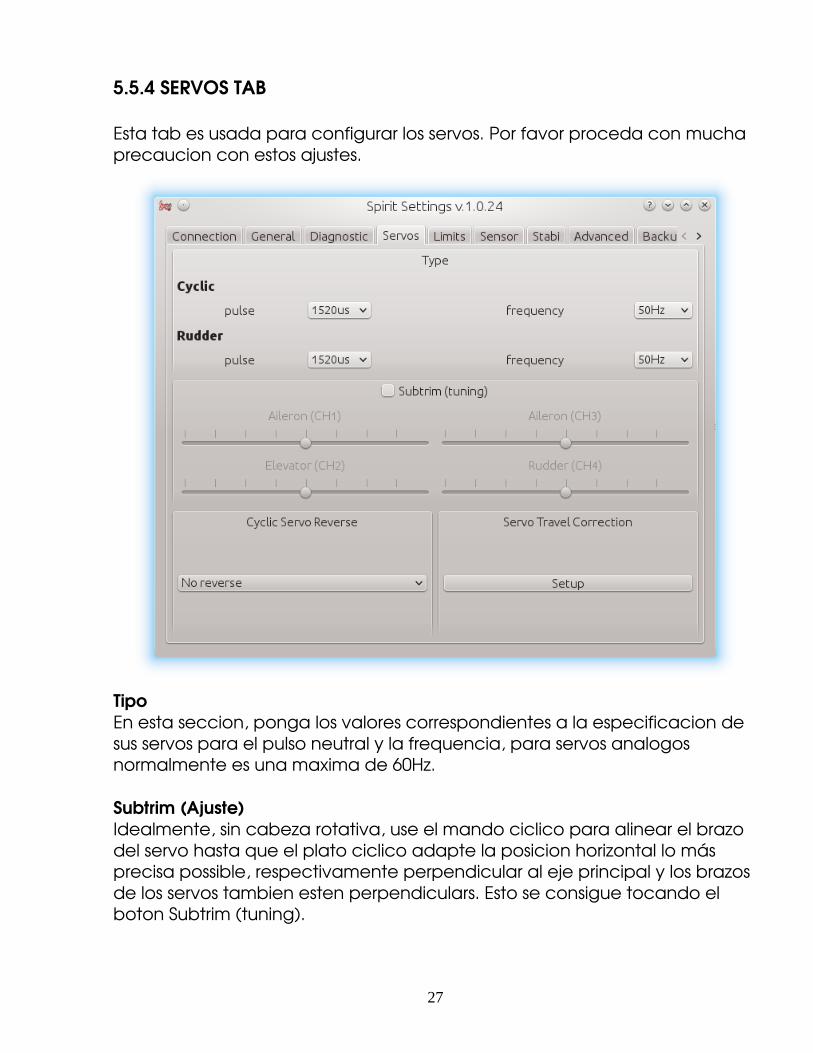
5.5.4 SERVOS TAB
Esta tab es usada para configurar los servos. Por favor proceda con mucha precaucion con estos ajustes.
TipoEn esta seccion, ponga los valores correspondientes a la especificacion de sus servos para el pulso neutral y la frequencia, para servos analogos normalmente es una maxima de 60Hz.
Subtrim (Ajuste)Idealmente, sin cabeza rotativa, use el mando ciclico para alinear el brazo del servo hasta que el plato ciclico adapte la posicion horizontal lo más precisa possible, respectivamente perpendicular al eje principal y los brazos de los servos tambien esten perpendiculars. Esto se consigue tocando el boton Subtrim (tuning).
27

Entonces la unidad se conecta en un modo especial en el cual la posicion colectiva tiene que ser neutral continuamente. Ademas, se cortara la estabilizacion.
Los servos se pueden ajustar muy facilmente en este momento. Cuando todo esta ajustado, el plato ciclico tiene que estar exactamente perpendicular con el eje central y adicionalmente el paso ciclico tiene que estar a 0° (Ahora es possible de medir y ajustar el angulo de paso, el rotor y las aspas con los instrumentos necesarios).
Tambien es necesario que los brazos de los servos esten perpendicular en relacion con las sarcasas de los mismos. Lo cual quiere decir que todos los servos como CH1, CH2, CH3 and CH4 son ajustados cada uno con su deslizadora independientemente. CH1 y CH3 son los servos de aleron. CH2 controla el elevador y CH4 controlael timon.
Tambien es recommendable de ajustar el subtrim y la mecanica del timon, que el brazo del servo este perpendicular con su carcasa y simultaniamenteel paso de timon sea 0°.Estos ajustes afectan la efectividad de paro del timon (cola).
Despues de estos ajustes es necesario de volver a tocar el boton de Subtrim (Tuning) para desactivar el modo especial.
NOTADespues de dejar el modo especial, la estabilizacion y el control tienen que funcionar de nuevo. Asegurese de que el canal del paso ciclico esta correctamente configurado en el transmisor.Lo cual quiere decir, usted puede ver 100% a 100% en la tab diagnose.Tambien asegurese de que 0% en la tab diagnose corresponde con la posicion neutral del mando Colectivo /Gas (con una curva 100% 100% de paso colectivo).
Invertir sevos ciclicosEslija que servos tienen que ser invertidos invertir la direccion de funcionamiento. Moviendo el paso colectivo todos los servos deben moverse en la misma direccion.La direccion correcta de avance colectivo puede ser programada en el transmisor.
28

No reverse – todos los servos sin invertirCH3 CH3 servo invertidoCH2 CH2 servo invertidoCH2 & CH3 – CH2 y CH3 estan invertidos
Servo correctura de trámiteSi usted marca este boton aparece una nueva ventana. Aqui se le ofrece modificar y ajustar la porcion de trámite de cada servo individualmente.Algunos servos no son muy precisos encuanto al trámite en ambas direcciones.Esta falta de precision puede causar caracteristicas negativas en vuelo.Si abre esta ventana, la unidad pasa a un modo que le permite hacer estas correcciones.
Esperamos que en los ajustes previos del Subtrim (tuning) el plato ciclico se puso a zero ciclico (0° de paso de helices).La procedura es tal que usted debe de utilizar el nivelador ciclico para determiner si hay algunas variaciones de los servos en las posiciones colectivas más bajas y más altas.Para las dos direcciones, es necesario de ajustar los valores independientes, por esta razon hay 6 deslizadoras.Si la desviacion de desplazamiento es menor de lo necesario, incremente el valor. Si es el contrario, reducir el valor.
Esta correctura tambien es muy eficaz si existe una asimetria geometrica en el helicoptero.Este fenomeno se observa cuando no es posible de conseguir el mismo paso colectivo en las dos direcciones.En este caso es necesario de modificar el minimo y el maximo de los tres servos al mismo valor.
29
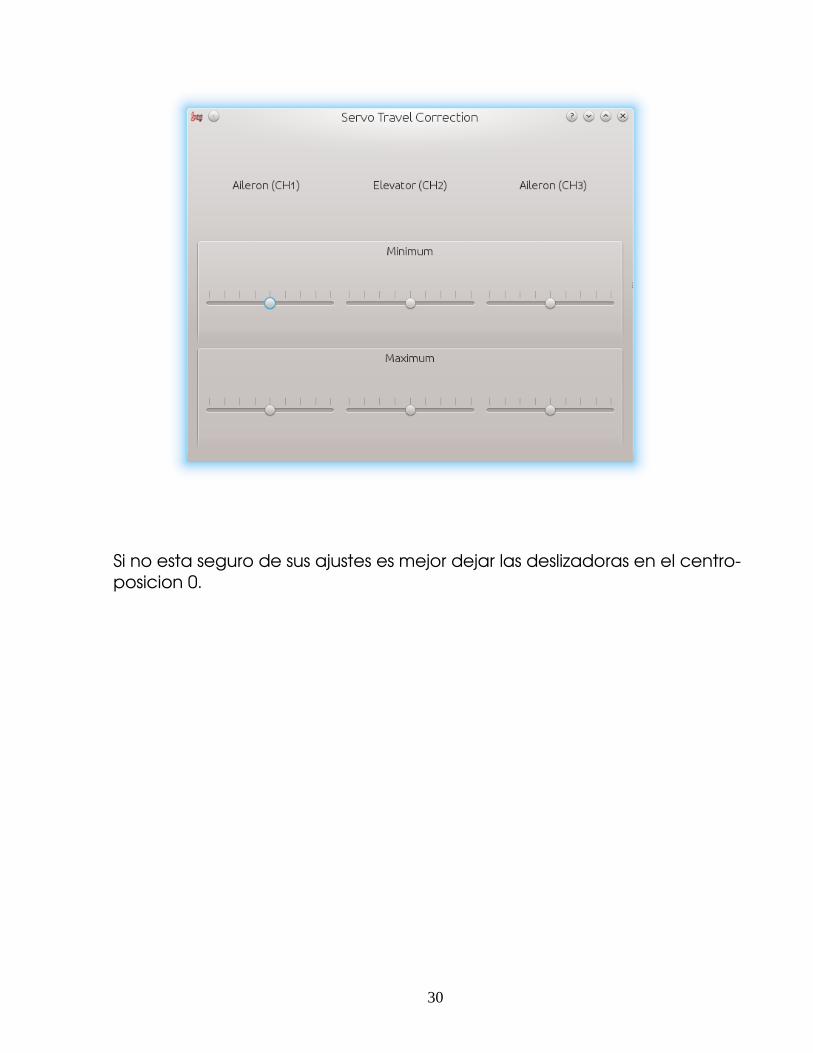
Si no esta seguro de sus ajustes es mejor dejar las deslizadoras en el centroposicion 0.
30
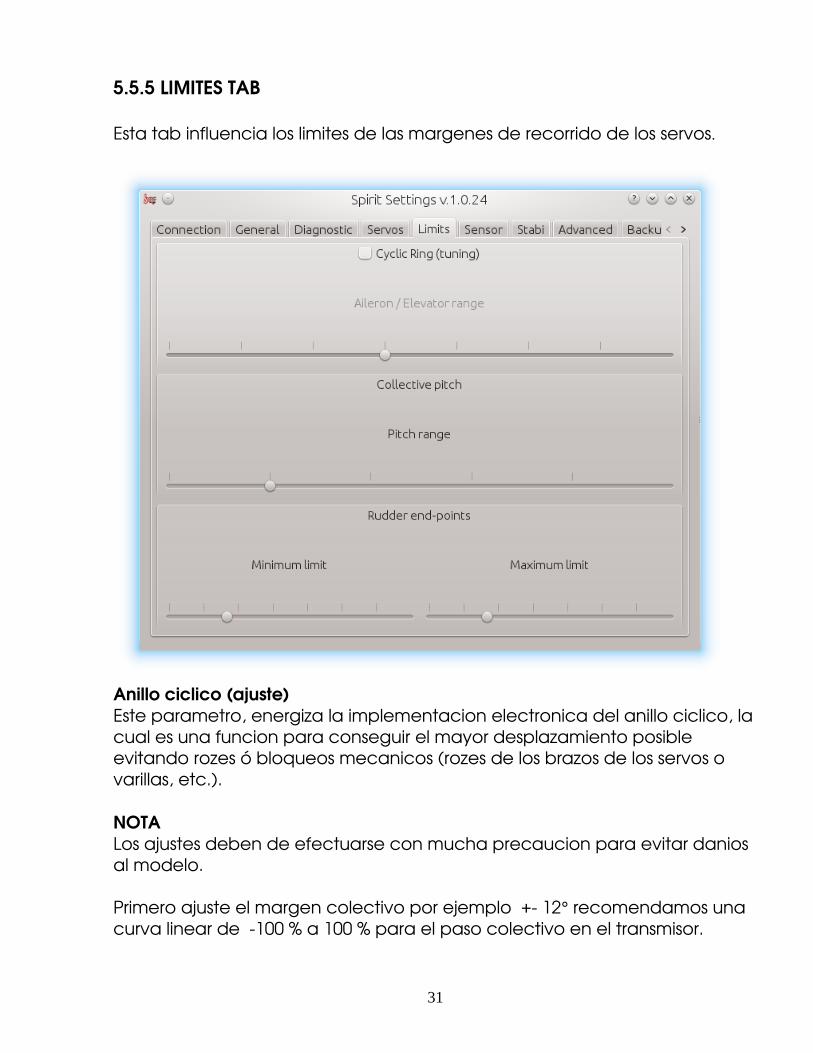
5.5.5 LIMITES TAB
Esta tab influencia los limites de las margenes de recorrido de los servos.
Anillo ciclico (ajuste)Este parametro, energiza la implementacion electronica del anillo ciclico, lacual es una funcion para conseguir el mayor desplazamiento posible evitando rozes ó bloqueos mecanicos (rozes de los brazos de los servos o varillas, etc.).
NOTALos ajustes deben de efectuarse con mucha precaucion para evitar danios al modelo.
Primero ajuste el margen colectivo por ejemplo + 12° recomendamos una curva linear de 100 % a 100 % para el paso colectivo en el transmisor.
31

Ahora es tiempo de ajustar Ail / Elemax. margen de inclinamiento ciclico, pruebe de alcanzar el mayor desplazamiento posible. Este parametro no afecta directamente la velocidad de rotacion, pero si es muy vajo, la rotacion del modelo puede ser permanentemente inconstante.
Este ajuste tiene que ser idealmente efectuado con 0° de colectivo, lo que quiere decir que los brazos de los servos tienen que estar perpendiculares sobre el eje central. Entonces, con cuidado, compruebe moviendo los mandos en todas las direcciones, si existen ó no rozes ó bloqueos mecanicos, tambien al mismo tiempo la maxima y minima posicion colectiva. Este parametro funciona como un asi – llamado, anillo ciclico electronico.
Si usted ahumenta el desplazamiento de la colectiva, en algunos casos esteparametro tendra que ser reajustado. En caso de que el anillo ciclico no tenga suficiente desplazamiento, es posible que durante un vuelo rapido hacia adelante el modelo puede entrar en una situacion de (pitch up) (ahunque el parametro de (pitch up) compensacion esté ajustado a un valor máximo).Esto ocurre porque el modelo no es capaz de mantener la direccion con loslímites configurados.
Limites de TimonMin/Max – Ajuste el minimo y maximo recorrido de las helices del eje del timon.
Recomendamos de ajustar estos valores hacia las dos direcciones para el mayor recorrido aconsejado por la manufactora del modelo. Sino al timon no le sera possible de mantener la direccion transversal durante extremas maniobras.
32

5.5.6 SENSOR TAB
Esta tab es la última parte importante que tiene que ser configurada con losajustes.
SensitividadEl manipulador de rotacion ajusta la sensitividad del giroscopo para los ejes del aleron, elevador y timon.
Gain ciclico – contra más alto es el valor, más alto es el nivel de precision. El valor basico (default) esta preconfigurado a 50% Gain. Para la mayoria de los modelos, un valor alrededor de 60% es optimal.
Rudder Common Gain (timon general Gain) – 100% quiere decir sin multiplicacion.
33
Normalmente es bueno para helicopteros de la clase 550 y más pequenios. Para helicopteros más grandes es casi siempre – 130% para un buen resultado.
Reverse (invertir)Ajusta la direccion de compensacion para cada eje independientemente.El plato ciclico tiene que inclinarse como si estuviera copiando al Horizonte.
Las palas del timon tienen que compensar en direccion contraria al movimiento del modelo.
NOTAEste parametro es el más importante de todos, es necesario de observar atentamente la orientacion de la compensacion y ajustarla correctamente.Como resultado de una compensacion erronea, el modelo sera completamente incontrollable. Y puede causar serias consequencias y destruccion.
Rotation speed (velocidad de Rotacion)Los ajustes preajustados (default) son más que nada para aprendices. El modelo es lento, este factor tambien depende de los ajustes macanicos, margenes del D/R (dual rate) en el transmisor y tambien en los limites del Alt/Ele, contra más grandes los valores, mayor la velocidad de rotacion.El preajuste esta a 8 – (default)
Recomendamos de ajustar este parametro de 6 12 en la mayoria, los rotors de DFC tienden a girar más rapido, asi que empezar con valores vajos.
34
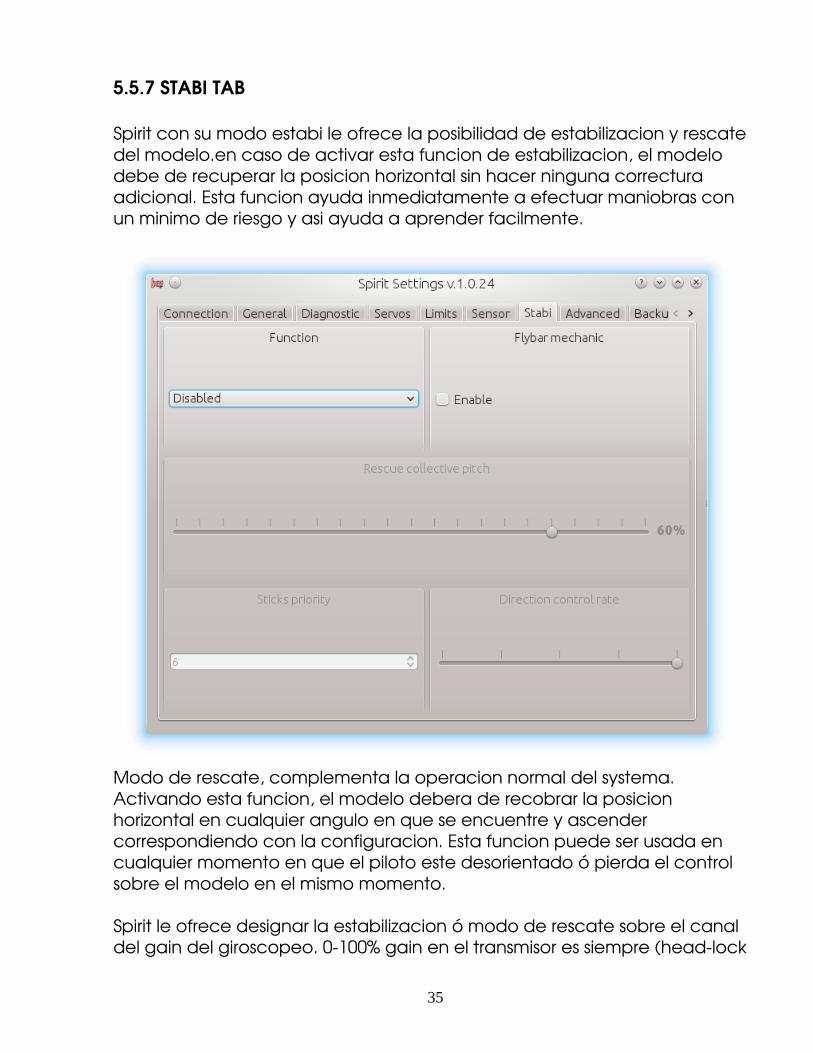
5.5.7 STABI TAB
Spirit con su modo estabi le ofrece la posibilidad de estabilizacion y rescate del modelo.en caso de activar esta funcion de estabilizacion, el modelo debe de recuperar la posicion horizontal sin hacer ninguna correctura adicional. Esta funcion ayuda inmediatamente a efectuar maniobras con un minimo de riesgo y asi ayuda a aprender facilmente.
Modo de rescate, complementa la operacion normal del systema. Activando esta funcion, el modelo debera de recobrar la posicion horizontal en cualquier angulo en que se encuentre y ascender correspondiendo con la configuracion. Esta funcion puede ser usada en cualquier momento en que el piloto este desorientado ó pierda el control sobre el modelo en el mismo momento.
Spirit le ofrece designar la estabilizacion ó modo de rescate sobre el canal del gain del giroscopeo. 0100% gain en el transmisor es siempre (headlock
35

gyro) modo y con 1000 % gain modo seleccionado es activado (funcion de parametro). Esto quiere decir que en vez de normal (rate) modo, se quedara en (head lock – gyro) mode y rescate/estabilizacion se activara.Asi poque el modo especial es activado, gyroscope gain por ejemplo 70% se considera como 70 % esta actitud, tambien se puede observar en la diagnose tab.
NOTAAlgunos transmisores tienen una banda de giroscopo entre 0 a 100% cuando 50% es el centro zero gain (por ejemplo Spektrum DX 6)
FuncionSeleccionar funcion que debera ser activada a 100% a 0% gyro gain, respectivamente. 0% 50% en el transmisor.
Disabled Normal (Rate) giroscopo modoRescate (normal) – Modo de rescate recobra el modelo en la posicion horizontal con los (Skids) siempre hacia abajo.Rescue (acro) – modo de rescate, recobra el modelo en la posicion horizontal en estado invertido ó no invertido.Stabilization – Estabiliacion del modelo.
ADVERTENCIAEn caso de que la optimizacion de pirueta no este configurado correctamente el modo rescate y estabilización no funcionara correctamente ¡¡ en el uso de estos modos, asegúrese de que su helicóptero se inicializa en una superficie plana, no inclinado a cualquier lado.El modo rescate es muy exigente para BEC. Asegúrese de que su BEC puede manejar este tipo de picos de carga.
Flybar mecánicoSi el helicóptero esta equipado con la mecánica flybar tradicional, tiene que habilitar este parámetro con el fin de utilizar los modos de estabilización o de rescate, Todos los ajustes son los mismos para el helicóptero flybared excepto este parámetro.
NOTAHelicópteros flybarless deben configurarse con el parámetro mecánico flybar deshabilitado.
36

Rescue mode collectiveDetermina la rapidez que el modelo sera recuperado en la posicion horizontal.100% quiere decir la defleccion maxima de las aspas que fueron configuradas en el servo tab.Es muy importante de comprobar si el modo de rescate funciona correctamente antes de efectuar el primer vuelo (sin girar el rotor), mirar si ladireccion de paso colectivo es correcto, si el paso colectivo no es positivo cuando el helicopter esta en el suelo, tendra que cambiar el valor negativo para este parametro.
Sticks priority (prioridad de mando)Especifica la cantidad de control durante el uso de la funcion especial, por lo cual contra más alto el valor, más reaccionara el modelo al movimiento de los mandos.
Direction control rate (tasa de control de dirección)Especifique el tipo de control de dirección para el modo de estabilización.Los valores bajos son muy adecuados para los principiantes a obtener el comportamiento similar a un coaxial.Los valores mas altos son mas apropiados para el vuelo de escala.
37

5.5.8 Advanced tab
Esta tab esta dirigida a pilotos avanzados. Es urgentemente recomendado entender estos parámetros. Ahun con todo, el ajuste correcto de (pirouete optimacizacion y geometria) son necesarios, los otros parametros dependen sobre las preferencias del piloto.
Stick deadband (Mando banda muerta)Determina el area pasiva donde el systema no reconoce ningun movimiento de mando depende de las preferencias y precision del transmisor.
Geometry 6deg (tuning)El ajuste correcto de este parametro es necesario para la correcta operacion de la unidad.Cuando se pone en marcha (enabled), la unidad se pone active en un modo especial para ajustes de 6° de angulo en las aspas del eje central. Es necesario de ajustar el angulo de las aspas en la
38
direccion del eje de la funcion Aleron, lo cual quiere decir que tiene que poner las palas en direccion paralelas al eje longitudinal del modelo.
Un valor alto incrementa el angulo, un valor bajo, disminuye el angulo. La optima geometria cabezal tiene que estar entre una escala sobre 90160. Si no encaja entre esta escala, es recommendable de reajustar las distancias de las juntas de bola en los brazos de los servos ó efectuar otros ajustes mecanicos. Pirouette optimization (tuning)Si usted toca el boton de este parametro la unidad entra en un modo especial en el cual usted tiene que comprobar y simultaneamente ajustar (correct compensation direction) compensacion direccional correcta.Con (correct direction) es possible de determinar si la rotacion del modelo alrededor del eje de viraje es de la misma manera que haciendo piruetas estacionarias satisfactorias.El plato ciclico se tiene que quedar en este momento inclinado y se tiene que comportar como una brujula. Lo que quiere decir que el plato ciclico tiene que quedarse inclinado todo el tiempo con relacion al suelo, ahunqueusted gire con el helicopter.Si esto no es asi la direccion es falsa. Usted tiene que invertirla con este parametro. Si esto no es correctamente configurado su helicopter no podra hacer pirouetas satisfactorias sin movimientos adicionales.Cuando los ajustes sean terminados tocar otravez el boton parasalir del modo especial.
Tail delay (retardo de cola)Esto es un parametro para suavizar el movimiento del timon.Tambien ayuda a estabilizar el timon, es una espezie de amortiguador. Es capaz de manejar los más pequenios movimientos cuando los valores son altos. Contra más rapidos son los servos, (tail delay) tiene que ser baja. Para servos analogos es recommendable de ajustar este valor a cerca de 25. Usualmente para servos digitales, es casi siempre entre 1520. Para servos muy rapidos (~0.04 s / 60°) el valor es 5. Si el valor es muy alto el timon puedeempezar a oscilar rapidamente, tambien puede empezar a vibrar ó producir paros de cola lentos.
Pirouette consistency Este parametro determina la consistencia de piruetas y paros (holding) rendimientos – rapido recuperacion de angulo correcto. Si las pirouetas no son tan constantes, velocidad de piroueta cambia durante algunas maniobras es necesario de incrementar este parámetro, el valor es individual para cada modelo. Depende de muchos factores del
39
mecanismo del timon, velocidad del rotor, etc. antes de ajustar este parametro es recommendable de ajustar el gain del giroscopo primero. Si elvalor es muy alto el timon puede oscilar mucho más energico y puede causar malas paradas de cola. El valor tiene que estar entre 150 a 175.
Rudder dynamicSi el timon no para correctamente. Por ejemplo sobrepasandose, este comportamiento se puede corregir con este parametro.Preajustado (default) es 5.Contra más grande el valor, más agresivo sera el comportamiento de la cola. En caso de que el timon se sobrepase a la parada, el valor esta ajustado muy alto.Este parametro afecta entre otras cosas, el mando responde más rapido al movimiento, contra más alto el valor más rapido responde el mando.Si usted no puede conseguir una parada simetrica hacia los dos lados, tendra que corregir el centro de la cola a 0° de angulo. Rudder – RevomixEl revomix supera el responso de la cola, más que nada a cambios agresivosdel paso colectivo, cuando necesita más fuerza para parar. Revomix funciona dependientemente con la curva del paso colectivo del transmisor.En el preajuste (default) esta desactivado, porque el usuario tiene que poner en la precompensacion la porcion y direccion apropiada.La direccion correcta es aquella que mueve las aspas del timon a la maxima positiva ó negativa posicion, para hacer fuerza en la misma direccion que el rotor principal. En la mayoria de los casos en sentido del reloj. A 0% de paso colectivo las aspas tienen que tener 0° de angulo. Los valores permitidos: 10 a 10 . Preajustado (default) es 0 inoperativo, en la mayoria de los casos no es necesario de usar este parametro.Casi siempre los timones sin problemás mecanicos funcionan muy bien sin usar el revomix.
Cyclic phaseEste valor indica el angulo en el que el plato ciclico revuelve virtualmente.Por ejemplo, un valor de 90 cambiaria el elevador a aleron y viceversa. Esta funcion es recomendada para modelos con rotores de helices multiples. Para la mayoria de los modelos, recomendamos un valor de 0 zero.
Elevator filterEste parametro compensa los saltos del elevador cuando se hacen movimientos bruscos. Contra más alto el valor, menos compensacion. Un valor muy alto puede producer un movimiento de elevador muy suave.
40

Nosotros recomendamos de ajustar el valor al preajustado (default) que es 0zero.
Pitchup compensationEn caso de que el el control en vuelo rapido hacia adelante no sea preciso,pequenios movimientos reaccionan muy violentos, ó el modelo sube porsisolo en vuelo rapido hacia adelante, nosotros recomendamos de incrementar este parametro gradualmente hasta que este fenomeno desaparezca.Si el helicopter sube abruptamente, puede ser originado por una muy baja inclinacion ciclica y alto paso colectivo. En este caso tendra que incrementar Ail/Ele tanto como el modelo accepte sin llegar a margen de rozar ó bloquear (binding). Si esto no funciona pruebe de incrementar este parametro tambien.
Cyclic feed forwardeste parámetro se utiliza para fijar la cuantiá de la sensación directa entre sus stick y el modelo de helicóptero. Cuanto mas alto sea el valor, mas agresivo el modelo se sentirá y mas rápido el modelo va a reaccionar a los movimientos de pegarse.Establecer este valor demasiado alto puede causar rebote elevador.Si el modelo se siente desconectado y hay un desfase entre las entradas de stick y el modelo, aumente este valor.
41

5.5.9 BACKUP TAB
Usted tiene que entrar aqui, siempre que quiera memorizar los cambios actuales permanentemente en la unidad.Tambien puede descargarlos en su ordenador, y descargarlos de nuevo en la unidad a cualquier momento.
ProfileEsta seccion te permite cargar y descargar cambios y ajustes completos de la unidad a un fichero determinado, si tiene más modelos no es necesario de hacer todos los ajustes de nuevo, sino que cargarlos de ficheros facilmente tocando el boton LOAD.
UnitCualquier cambio de la configuracion puede ser descargado en cualquier momento en la memoria (flash memory) interna de la unidad.Para volver a los parametros de fabrica (default) activar el boton Factory Settings.
42

NOTARecuerde de cargar los ajustes cada vez que quiera memorizar los permanentemente. Usted tiene que activar el boton Save. De lo contrario, los valores y cambios se perderan despues de apagar la unidad!
43
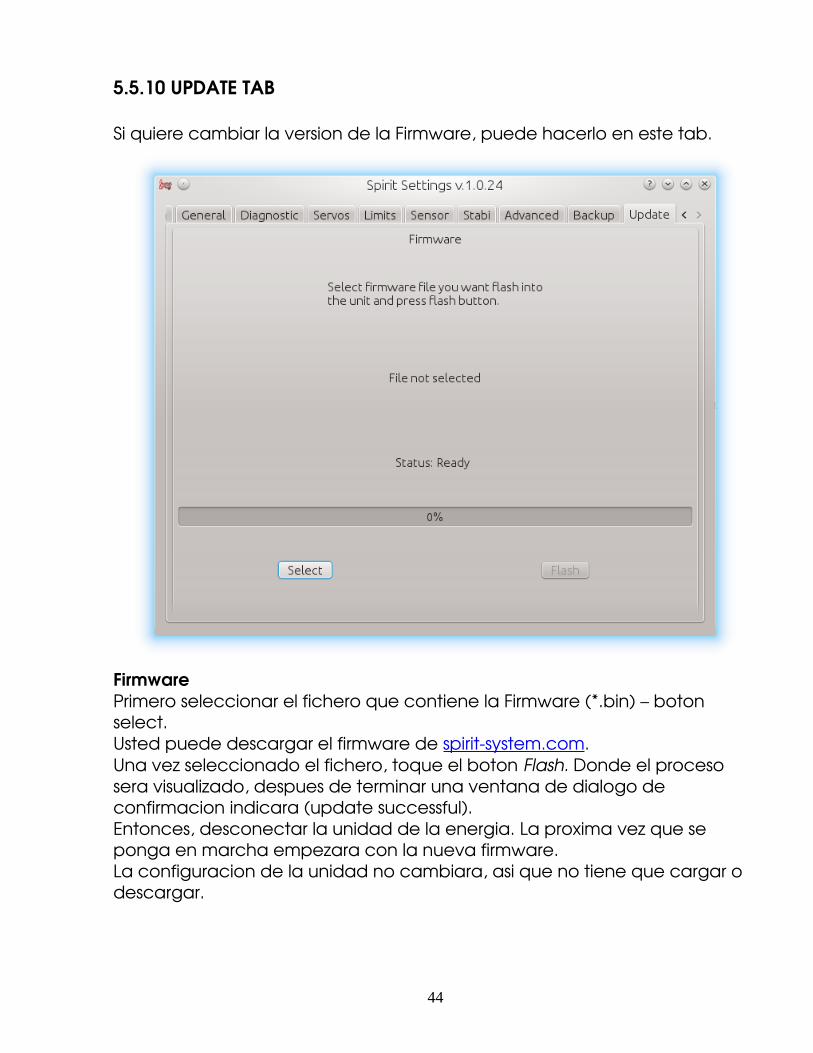
5.5.10 UPDATE TAB
Si quiere cambiar la version de la Firmware, puede hacerlo en este tab.
FirmwarePrimero seleccionar el fichero que contiene la Firmware (*.bin) – boton select. Usted puede descargar el firmware de spiritsystem.com.Una vez seleccionado el fichero, toque el boton Flash. Donde el proceso sera visualizado, despues de terminar una ventana de dialogo de confirmacion indicara (update successful).Entonces, desconectar la unidad de la energia. La proxima vez que se ponga en marcha empezara con la nueva firmware.La configuracion de la unidad no cambiara, asi que no tiene que cargar o descargar.
44
6. PRIMER VUELO
Si esta seguro de que la unidad esta configurada correctamente, usted estapreparado para el primer vuelo.
6.1. Preflight control (inspeccion de prevuelo)
1. Encienda el transmisor y conecte la batteria del modelo.2. Espere la inicializacion – Plato ciclico salta.3. Incline el modelo de la cola hacia arriba. El plato ciclico tiene que
compensar este movimiento y inclinarse en la direccion opuesta y quedarse horizontal.
4. Igualmente, incline el modelo hacia un lado, tambien aqui el plato ciclico tiene que mantener el horizonte.
5. Mover la cola en cualquier direccion. El deslizador de palas tiene que ir al lado contrario.
6. Compruebe que los mandos del transmisor funcionan en la direccion correcta.
7. Ponga el modelo en una superficie plana y centre el plato ciclico. El deslizador de las palas del timon tiene que estar entre el centro de su recorrido.
ATENCIONSi ha encontrado problemas con algun punto, no intente despegar!
6.2. TAKEOFF (DESPEGE)
1. Ponga en marcha el rotor y ajuste las revoluciones deseadas.Recomendamos de empezar con revoluciones un poco más bajas delo acostumbrado.
2. Despacio avanzar el paso colectivo del valor neutral.3. Pruebe a manejar el timon para comprobar si el gain y condicion de
paro son buenas.4. Si los controles no son muy precisos, moderadamente ajustar los gains
del ciclico y el timon, asi como sea necesario.
45
7. PROBLEMAS Y SOLUCIONES
Descripcion de problema SolucionPlato ciclico ó timon se derivan despuesdel iniciamiento
Comprobar trims y subtrims con los mandos en posicion neutral tienen que estar a 0%, ver la tab diagnose.Incremente el mando deadband en la advanced tab.
El control no es preciso. Incrementar cyclic gain y/ó incrementarel gyro gain en el transmisor.Adderir exponentials en el transmisor.
Movimientos agresivos del paso ciclico, originan rapidas oscilaciones de la cola en grandes margenes angulares.
Desminuir Pirouette consistency en Advanced tab gradualmente en unidades de 10 hasta que el fenomeno desaparezca. Compruebe el mecanismo de cola, es necesario de que funcione suavemente.
Modelo oscila en los ejes de rlevador ó aleron.
Reducir Cyclic gain en la Sensor tab.
Cola oscila rapidamente Reducir gyroscopo en el transmisor.
Model pirouete rotacion es muy lenta / rapida
Aumentar/ desminuir velocidad de rotacion del timon en Sensor tab.
Los servos vibran incontrolados sin influencias externas.
Controlar los cables y conexiones entre el recividor y la unidad.
Durante pirouetas estacionarias el modelo se deriva.
Compruebe la direccion correcta de pirouette optimization en Advanced tab.
Movimientos agresivos en los mandos del elevador ocasionan saltos
Incrementar el Elevator filter en Advanced tab. Si el resultado no es satisfactorio, reduzca Cyclic feed forward en Advanced tab.
Retardos en los movimientos ciclicos Incrementar Cyclic feed forward en Advanced tab.
46

8. GRACIAS
A todos que han participado y participan en el projecto. Muchas gracias!
Specialmente a: Adam Kruchina Daniel Beneš Dušan Habada Elke Lalanza Jens Lalanza Martin Přinda Martin Štvrtňa Milan Křivda Milan Pěchovič Petr Čada Petr Koťátko Rafael Villarta Castillo René Štefánik
47

Declaracion de conformidad
Aqui confirmamos que la unidad Spirit esta siendo producida sometida a la EMC directiva 2004/108/EC, Compatibilidad Electromacnetica.
Tomáš Jędrzejek © Spirit System
48