-
7/30/2019 Icns Cheng
1/13
1
Research Progress on an Automation Concept for
Surface Operation with Time-Based Trajectories
Victor H. L. Cheng, Optimal Synthesis Inc., Palo Alto,
California
Abstract
To address anticipated growth in air trafficdemand, the Surface
Operation AutomationResearch (SOAR) is a collection of
researchactivities designed with the common goal to exploreand
develop automation technologies for enhancingsurface movement
efficiency at major airports. Theconcept features a tower
automation system thatcounts on the availability of
advancedsurveillancedata to plan the execution of timed
surfaceoperations to enhance movement efficiency andsafety.
Communication of the clearances willrequire the availability of
digital data link for
sending the data for executing the time-basedtrajectoriesknown
to some as 4-dimenaional (4D)trajectories. The concept also
features a flight-deckautomation system that counts on the
availability ofadvanced navigation data to enable the flights
toexecute the 4D trajectories with high timingprecision. The
arrangement results in acollaborative concept where the tower and
flight-deck automation systems count on each othersabilities to
jointly deliver the efficient and safesurface traffic. Several
publications havedocumented the SOAR concept and initial
feasibility studies of the tower and flight-deckautomation
systems based on early experimentalsoftware prototypes of the
automation functions.This paper serves as a progress update of the
SOARdevelopment effort. Specifically, it covers
recenthuman-in-the-loop experiments to study proceduresand
controller roles and responsibilities involvingthe tower automation
system, as well asdevelopment of the flight-deck automation
systemin terms of its guidance and control functions.
IntroductionThe predicted growth in air travel requires
capacity enhancement in the National AirspaceSystem (NAS), and
congestion at key airports hasbeen recognized as one of the most
prominentproblem areas1. With flights operating at limitsdictated
by operational requirements associated
with current airport configurations, airport
expansion plans involving addition of new runwaysand taxiways
are being realized to increase theairports capacities. However, the
expansion plansnecessarily increase the complexity of the
airportconfigurations, and the increase in complexity tendsto
penalize the efficiency of the system, partiallyoffsetting the
capacity-related benefits of theinvestments. The Surface Operation
AutomationResearch (SOAR) concept has been proposed as
acollaborative concept to provide tower and flight-deck automation
systems to enhance the operationalefficiency in complex airport
environments, thus
softening the penalties to fully realize the capacitybenefits
sought by the airport expansion plans. Theconcept depends on
advanced Communication,Navigation, and Surveillance (CNS) as
enablingtechnologies to achieve a seamless integration ofthe tower
and flight-deck automation systems.
Tower automation is based on the Ground-Operation Situation
Awareness and Flow Efficiency(GoSAFE) concept previously developed
under aNASA-sponsored research program to ease runwayaccess
conflicts, especially in situations whereactive-runway crossings
constitute a significant taxi
delay problem. To help achieve the potentialGoSAFE benefits,
theFlight-Deck Automation forReliable Ground Operation (FARGO)
concept hasbeen proposed to provide the necessary
flight-deckautomation for enabling precision taxi control tocomply
with GoSAFE clearances. Fundamentally,the GoSAFE/FARGO integration
is based on 4Dtrajectories consistent with the
airportconfiguration. Although the taxi operation isconstrained on
the airport surface, the taxi routewith timing constraints at
specified locations is stillreferred to as a 4D trajectory in the
same spirit as
4D trajectories in flight, with the caveat that thealtitude
dimension of the 4D space is constrained tothe surface.
Previous publications have documented theSOAR concept2,3,4, the
automation systems5,6, andsome evaluation activities7 based on
computersimulations of surface operations at a single hub
1-4244-1216-1/07/$25.00 2007 IEEE.
-
7/30/2019 Icns Cheng
2/13
2
airport8 as well as the effect on the NAS-widetraffic9. This
paper serves as a progress update ofthe development of these
automation systems andthe assessment efforts.
In particular, the tower operations involvingthe GoSAFE
automation system has been subjectedto a series of
human-in-the-loop experimentsinvolving tower-controller subject
experts in a full-scale tower simulator with realistic visual
andsystem capabilities. Since the role of theautomation system is
not to eliminate controllerpositions, but rather to assist the
controllers inhandling a larger amount of traffic as predicted
forthe future, the experiments focused on scenariosinvolving
significantly higher demand levels.Different operational procedures
involving voiceclearances and data-linked clearances were tested,as
well as variations in the controllers roles andresponsibilities.
The experiments have generallysupported the controllers
receptiveness toautomation systems, and revealed the need
forserious investments in technology development totransform the
experimental prototype of theautomation system into a mission-ready
system. Asummary of the experiments is provided below,with more
detailed accounts of the experimentationefforts to be presented in
other publications10,11.
Though the development of GoSAFE hasreached a level that
high-fidelity human-in-the-loopevaluation can be performed,
development of the
FARGO system is less mature. In the human-in-the-loop assessment
of GoSAFE, it was assumed thatthe flight decks were equipped with
FARGOautomation, which was emulated in the simulationof the surface
traffic. In the mean time, actualdevelopment of the FARGO
technologies hasprogressed in parallel in the last year12.
Thedevelopment includes consideration of the flight-deck
operational procedure, which is beingformulated to incorporate
lessons learned from theGoSAFE experiments.
The next section provides an overview of the
SOAR collaborative surface-operation automationconcept, followed
by a description of the human-in-the-loop experiments of the GoSAFE
system, andrecent development effort of the FARGO system.
Overview of Collaborative
Automation Concept
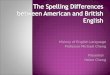
Airport capacity, or the lack thereof, isreflected in the amount
of delay incurred by thetraffic13. Figure 1 illustrates some of the
factorscontributing to taxi delays on the airport surface.
The most prominent delays felt by the travelingpublic in the
movement area are associated with thequeuing for departure and the
queuing for activerunway crossing. Waiting for gate access at
thepassenger terminal and the need for deicing are alsonotable
causes. The first two factors are related torunway access, and they
become worse as airportexpansion plans introduce more runways,
whichlead to increased amount of active runwaycrossings. Moreover,
having more traffic at theairport further exacerbates the runway
accessproblem. It will be beneficial if the traffic can be
precisely controlled so that the flights can performactive
runway crossings in between takeoffs andlandings, without
introducing takeoff or landingdelays. This level of precise traffic
control isdifficult in the presence of control-timinguncertainties
associated with current operationalpractices of voice clearances,
voice-based handoffs,and manual control of the aircraft that do not
lendthemselves to operating according to strict
timingconstraints.
ControlTower
FireStation#1
13L
17R
17L
AB
E
C
17C
EastATCT
Queuing forTakeoff Speed UncertaintySpeed Uncertainty
Queuing forActive-RunwayCrossing
Queuing forActive-RunwayCrossing
Stop-and-Go TimingStop-and-Go Timing
HandoffbetweenControllers
HandoffbetweenControllers
Figure 1. Operational Factors of Taxi Delays
The SOAR concept tries to achieve the precisecontrol in taxi
operations through collaborativeautomation between the tower and
the flight deck,as illustrated by Figure 2.
-
7/30/2019 Icns Cheng
3/13
3
Flight-Deck
Automation
ControlTower
DatalinkedClearances
Surface TrafficManagement/Strategic Automation
Surface TrafficControl/Tactical Automation
Figure 2. Collaborative Automation between Tower and Flight Deck
Operations
In the control tower, the Strategic Automationdepicted in Figure
2 is responsible forSurfaceTraffic Management (STM) functions
including
decisions on airport configurations and coordinationof the
runway assignment, sequencing andscheduling of arrival and
departure flights withTerminal Control. The Tactical Automation
isresponsible forSurface Traffic Control (STC)functions that
involve taxi operation planning,clearance management, and surface
conflictmanagement including the prevention of runwayincursions.
The GoSAFE technologies explored to-date have focused on these STC
functions.
With GoSAFE issuing the clearances, theFARGO system provides
theFlight-Deck
Automation functions suggested in Figure 2 toexecute the
clearances. The SOAR concept is builtupon the following coupled
assumptions:
1. The FARGO automation system can achievehigh-precision taxi to
allow the flight tomeet any reasonable crossing times at
selected points along a pre-specified taxiroute on the airport
surface.
2. The GoSAFE automation system counts on
the availability of FARGOs precision-taxicapability to plan
efficient and safeoperations for the surface traffic.The
precision-taxi capability reduces
operational uncertainty that impacts the separationmargins the
controllers have to introduce to assuresafe operations. Reducing
the separation marginswill result in improved efficiency.
Furthermore, thereduced uncertainty allows the more
efficientoperations to be delivered with at least the samelevel of
safety as in existing operations, even in thepresence of reduced
temporal or spatial separation
between aircraft operations. Safety in this case isdefined based
on the probability of conflicts, notmerely the nominal separation
between vehicles.Reduced uncertainty can produce lower
probabilityof conflict even when the nominal separation
isreduced.
-
7/30/2019 Icns Cheng
4/13
4
The block diagram in Figure 3 illustrates theinteraction between
the GoSAFE and FARGOautomation systems, and the interactions of
theoperatorsair traffic control and flight crewwiththese systems.
It also depicts the feedback nature ofthe whole traffic control
operation with CNSfunctional blocks, where advanced CNS are
considered enabling technologies for theautomation concept.
Tower Automation
GoSAFE
Flight-Deck
Automation
FARGO
Navigation
Surveillance
Communications
Aircraft
Dynamics
Cockpit CrewAir Traffic Controller
Figure 3. Block Diagram of SOAR Concept
Tower Automation
The STM functions of the tower automationhave been extensively
studied by NASA under theresearch activities involving the
SurfaceManagement System (SMS)14, whereas research ofthe GoSAFE
system has focused on the STCfunctions. This separation of the
functions is notintentional, and has emerged as a result of
twoindependent efforts with their scopes limited byresearch
resources. It is conceivable that practicaltower automation will
encompass both STM andSTC functions in an integrated system.
The STM functions include automationassistance to help the Air
Navigation ServiceProvider (ANSP)15 in the control tower to plan
andschedule airport runway configurations, and toschedule runway
usage for the arrival and departureflights, of which the flight
plans should have beenfiled by the Flight Operations Center (FOC)
of eachindividual carrier. The functions should be
performed in coordination with the ANSP in chargeof the terminal
airspace.
With the airport runway configurationdetermined and flight
details made available by theSTM functions, the STC automation
would plan outthe surface operation details for execution by
theflights. The GoSAFE system in its current state
contains the following key functions2,4, though atdifferent
levels of maturity:
Planningfunctions for generating efficient taxiclearances: The
current implementation ofGoSAFE uses a dynamic programmingapproach
to optimize individual taxi routes, andthen adjusts the timing at
intersections and therunways to avoid conflicts and incursions.
Thekey objective is to plan the 4D trajectories sothat runway
occupancy can be kept to aminimum, including the occupancy by
therunway crossing traffic. This means that therunway crossing
flights are expected tocontinue taxiing without holding and to
crossthe runways at the assigned times. Calculationsof taxi routes
and timing take into accountaircraft performance according to
aircraft type,and weather conditions including surface windsand
surface conditions. The resulting 4Dtrajectories can be edited by
the controllermanually. Future research will considerintegrating
the route planning and de-confliction functions into a unified
solution forenhanced performance.
Traffic controlfunctions to facilitate issuanceof clearances to
flight deck: The 4D trajectoriesfor the taxi operations are
converted intoclearances that resemble current-day
versionsrepresented by a list of taxiways, runways,exits, ramp
spots, etc.so that they can be
easily understood by the controllers and pilots.The 4D nature of
the trajectories is realized byembedding in the clearances timing
constraintsfor crossing selected locations along the
taxiroutes.
Traffic monitorfunctions to ensure safety oftraffic while
executing demanding operations:Since the clearances are supposed to
containconflict-free trajectories, any conflict orincursion by any
flight under tower controlwould involve at least one flight
deviating fromthe cleared trajectory.The GoSAFE systemcontains a
Conformance Monitorfunction todetect flights that deviate from
their clearancesby cross-checking the clearances withsurveillance
data. A Conflict Predictionfunction is also planned for
identifyingpotential conflicts and incursions. This functionshould
provide improved performance over the
-
7/30/2019 Icns Cheng
5/13
5
Airport Movement Area Safety System(AMASS) because it has access
to (a) moreaccurate surveillance data complete withaircraft
identification, and (b) intent of theflights deduced from the
clearances.
Graphic user interface (GUI) to support theaforementioned
functions: Each controllerstation can be tailored to the
specificcontrollers needs and preferences, even thoughall the
stations are accessing data from a centralGoSAFE system. The
stations GUI allows thecontroller to monitor the traffic, view and
edittaxi routes, issue clearances and check theirstatus. It also
provides the interface to alert thecontrollers of impending
problems, includingflights deviating from their clearances
andpotential conflicts or runway incursions.
Flight-Deck AutomationTechnical feasibility of a flight-deck
automation system has been investigated inprevious studies6,4.
Development of the automationtechnologies is currently being
undertaken by aFARGO project12. The following functions
areenvisioned as part of the FARGO automation.
Planningfunctions for planning the surfaceoperations: This
function involves handling theclearances issued by tower, and
inputting theminto the flight control computer for pre-
visualizing the surface operations andeventually for performing
the taxi operations.
Auto-taxi functions to generate aircraft taxicontrol commands:
Advanced guidancefunctions convert the clearance information into4D
trajectory information for achievingprecision taxi requirements
demanded byGoSAFE-generated clearances. Advancedcontroller designs
provide the means to trackthe 4D trajectory. The automation
functionstake into account aircraft performance andweather
conditions.
Pilot interface to enable pilots to executeprecision taxi
operations: Displays are includedin the FARGO concept to process
theclearances and present the 4D trajectoryinformation to the
flight crew. Other controldisplays provide control information to
thepilots either for monitoring performance in a
fully automatic mode or for conveying controlcues in an
automation-assisted mode.
Traffic monitorfunctions provided throughpilot interface to
alert pilots of impendingdanger: FARGO can monitor the
aircraftsnavigation state to alert the pilot of anysignificant
deviation from its cleared taxiroutes. It can also track the
surveillance datafrom other flights on the surface to alert
theflight crew of any impending conflict orincursion by other
vehicles.
Discussion of the FARGO development effortis provided later in
the paper.
Operational Procedure
Since the SOAR concept promotes trafficefficiency through the
use of time-based route
clearances that can be accomplished only withautomation such as
FARGO, the use of voiceclearances to send the timing details is
consideredimpractical and the use of digital data link isconsidered
necessary. With so much informationembedded in the clearances, the
procedures use pre-clearances to initially send the complete
routeinformation, to allow the flight crew ample time tocomprehend
the intended operation and identify anypotential cause for
concern.
Furthermore, as the taxi route nominally wouldcontain locations
where safety may become a
serious concern if the aircraft is unable to achievethe precise
timing (e.g., active-runway crossings),contingency holds are
inserted along the route atthese locations to give the controller
the option ofallowing the aircraft to come to a stop if
thecontroller chooses not to clear it to go beyond thatpoint. This
means that the pre-clearance in factconsists of a number of
segments, each of whichneed to be cleared as a separate clearance,
and eachsegment contains a contingency hold at the endexcept for
the final segment. The contingency holdis automatically removed
when a subsequent
segment is cleared.
The SOAR operational procedure for handlingpre-clearances
contains the following events:
Minutes before the clearance is needed,GoSAFE sends FARGO a
data-linked pre-clearance containing taxi route information
-
7/30/2019 Icns Cheng
6/13
6
similar to conventional clearances, with theaddition of time
constraints where necessary toresolve conflicts with other vehicles
andrunway usage.
FARGO would automatically access airportlayout database to
convert the pre-clearanceinto route-segment information ready for
accessby the cockpit crew.
When selected by the pilot, FARGO woulddisplay the clearance in
both textual andgraphical forms, with the crossing
constraintsappropriately emphasized. If the pre-clearanceinvolves
more than one segment, the locationsof the contingency holds for
the segments arealso displayed to the flight crew.
The FARGO interface provides the pilot withoptions to accept or
reject the pre-clearance.Acceptance of the pre-clearance
automaticallysaves the information for later use.
Acknowledgment of the pre-clearance is data-linked back to
GoSAFE to help the controllerskeep track of the status.
With the taxi route information already sent tothe flight deck
in the form of a pre-clearance, thereis no need to repeat all the
information when thesubsequent clearances are issued. The
individualclearance segments can be abbreviated withidentifiers to
reference the pre-clearance. Thisabbreviated form allows the
controller the option toissue the clearances by voice or by data
link. Sincetiming is important in executing the timedclearances, a
clearance should be issued sufficientlyearly ahead of time (e.g.,
tens of seconds) so thatFARGO can initiate the operation at the
momentthe segment is supposed to commence. The SOARprocedure for
handling clearances contains thefollowing events:
A tower controller issues a clearance for asegment by voice or
by data link, as desired.
The flight crew either accepts or rejects thesegment clearance,
using the same mode ofcommunication (i.e., voice or data
link).Acceptance of the clearance by data link willautomatically
activate FARGO for the segment;otherwise, the pilot has to manually
activate thesegment.
Acceptance of a segment clearance willautomatically remove the
contingency hold atthe end of the last cleared segment, and
appendthe new segment to it.
Data-linked acceptance of a clearance alsoautomatically notifies
GoSAFE; otherwise, the
controller will need to manually updateGoSAFE with the clearance
status. Speechrecognition is being considered for futureresearch to
convert voice acknowledgment intosignal to update GoSAFE.
Rejected clearances will lead to GoSAFEreplanning taxi
operations, including theoperations of other affected flights.
Thereplanning normally involves adjusting thetiming constraints,
but in serious situations mayrequire completely new
pre-clearances.
Handoff between controllers can be done byvoice or data link, or
independently by theflight crew based on published procedures.
Procedures dealing with emergency situationssuch as reacting to
conflicts or incursions typicallywill involve some flights
performing an emergencymaneuver (e.g., stop) that will cause
theconformance monitor functions of the automationsystems to detect
the problem. The controllers willlikely given voice clearances to
resolve the problempromptly, and proceed to use GoSAFE to replan
theoperations. This subject is an important item for
future research on off-nominal situations.
Human-in-the-Loop Experiments of
Tower Automation
The SOAR concept was given the opportunityin the last two years
to benefit from human-in-the-loop experiments to study the
plausibility of theconcept. Furthermore, since the goal of
theautomation concept is to enable the tower ANSP tohandle heavier
traffic in a complex environment,the experiments also serve to
explore what roles and
responsibilities are most appropriate for the humanoperators to
achieve this goal. The subject matterexperts (SME) participating in
the experiments allhad working experience as tower controllers.
-
7/30/2019 Icns Cheng
7/13
7
Simulation Facilities
As a future concept that involves sophisticatedautomation, the
SOAR concept will require a lot oftesting to verify its efficacy
and reliability of itssystems before it can be considered for field
tests.Such tests can benefit tremendously from a
realisticsimulation environment, and the project was
fortunate to have a world-class tower simulatorthe FutureFlight
Central16 at NASA Ames ResearchCenteravailable for this advanced
research topic.Figure 4 contains a wide-angle view of the
towersimulator, which is a full-scale representation of acontrol
tower with a full 360 airport view.
Figure 4. View of the Tower Simulator
FutureFlight Central Tower Simulator
Pseudo-Aircraft Station
DoD High-Level Architecture (HLA)
GoSAFE
ATG
Figure 5. Real-Time Simulation Architecture
An experimental prototype of the GoSAFEsystem was installed at
the tower simulator, withthe GoSAFE GUI installed at four
controllerstations to support two Local and two GroundController
positions. The traffic was provided by apseudo-aircraft system
called Airspace TrafficGenerator (ATG), with pseudo-pilots
controlling
the simulated flights and communicating with thecontroller
subject experts. Figure 5 illustrates howthe simulation facilities
and experimental systemsare networked together based on DoDs
High-LevelArchitecture (HLA).
Experiment Scenarios
The experiments have been designed aroundthe east side of
Dallas/Fort Worth InternationalAirport (DFW), with the controllers
operating fromthe vantage point of the East ATC Tower as
depicted in the layout of Figure 1. A South Flowairport
configuration was used for all theexperiments, where typically
runways 17R and 13Lare for departure, and runways 17C and 17L are
forarrivals. Some experiment runs tested the use ofrunway 17R for
mixed arrival/departure traffic,when the scenario included a heavy
arrival demand.
The traffic demand used in the simulations wasset at about 150%
of current-day levels, partly toaccount for the anticipated
increase in air traffic,and partly to account for the absence of
groundvehicles in the scenarios. Simulation of arrival
flights started at about 12 nmi out, and departureflights would
end at about 5 nmi after takeoff.Simulation on the surface was
limited to themovement area up to the ramp spots. Operationswithin
the ramp area were not included.
Three scenario data sets of flight scheduleswere generated for
the experiments to representthree different arrival/departure mixes
andtransition characteristics. In order to verify thatGoSAFE could
actually handle this level ofdemands, verification simulations were
run withGoSAFE automatically issuing the clearances to
thepseudo-aircraft system, which would in turnautomatically accept
the clearances and cause thesimulated flights to execute the
clearances as ifthere is a FARGO system doing the auto-taxi.These
runs were successful in verifying the routeplanning functionality
of GoSAFE, but they werenot considered part of the experiments
because fully
-
7/30/2019 Icns Cheng
8/13
8
automatic surface traffic control was not anoperational concept
being studied.
Options on Operational Procedures, Roles,
and Responsibilities
With the operational procedure described
above, several options were explored for varyingthe
procedure:
Voice vs. Data-Link ClearancesThe main variation of the
procedure was to
compare the issuance of clearances by voice versusby data link.
A special keypad was provided ateach controller station with a key
for sending adata-linked clearance. If it is issued by voice,
thecontroller will have the task of informing theGoSAFE system
whether the clearance is acceptedor rejected; for this the
controller has two keys toenter these two respective responses.
HandoffsHandoffs of flights between controllers involve
frequency changes, and the controllers were giventhe option to
perform the handoff by voice or bydata link. A key stroke would be
required if thehandoff was to be done by data link.
Replanning for New ClearancesThe controllers had the option of
adjusting a
taxi route manually using the GoSAFE GUI5spatially or
temporally. In this case, a new pre-clearance would be
automatically generated andcommunicated to the flight deck.
In addition, a function was introduced as theexperiments
progressed to allow the controller torequest GoSAFE to replan only
the timingconstraints. The need for this function wasidentified
when controllers began to deviate fromissuing the recommended
clearances and caused theflights to miss the timing constraints.
This functionwould also be useful for restarting flights held
atcontingency hold points.
Controller Roles and ResponsibilitiesThe original experiments
were set up for the
controllers to maintain the usual tower controllerpositions
similar to todays operations: specifically,the SOAR experiments
focused on Local andGround Controllers. Typically, the SMEs
wouldplay the role of two Local and two Ground
Controllers for the DFW East ATC Toweroperations.
With the extra heavy traffic defined in thedemand scenarios, it
was evident that the LocalController responsible for runway 17R had
theheaviest workload, since this position had to dealwith every
flight operating to/from all fourrunwaysthe flights either take off
or land on 17R,or they have to cross 17R when taxiing betweentheir
arrival/departure runway and the ramp area.To help relieve this
controller positions workload,some experiment runs were performed
with theGround Controller responsible for the south-sidetraffic to
take over the runway 17R crossing trafficnear the south end. This
means that the twocontrollers had to share the responsibility
ofcontrolling the traffic over runway 17Raprocedure that should
require serious coordinationbetween the two positions to prevent
runwayincursions.
Another key change of controllerresponsibilities is associated
with the introductionof an automation system. How this change
affectsthe controllers performance of controlling thetraffic and
keeping a mental picture to detectoperational hazard will remain an
importantresearch issue through the course of this research.
Brief Discussion of Experimental Findings
Voice vs. Data-Link ClearancesAlthough the controllers have the
flexibility tochoose between voice or data link for issuing
eachclearance, the experiments were set up to ask themto nominally
use one or the other in a single run. Itwas observed that after
having used the keypad oneway for one run, if the controllers were
asked to usethe second approach for the next run, there seemedto be
an increase in likelihood of them pushing thewrong button on the
keypad. This suggests thatkeypad design may be important in
distinguishingthe actions for voice and data-link clearances.
In general, the controllers could handle theclearances better
with data link than with voice. Apossible reason is that, with data
link, the controllerdid not need to wait for the acknowledgment
beforeworking on another flight as he/she would by voice.The amount
of time that the controller had to waitcould have been inflated as
a result of the
-
7/30/2019 Icns Cheng
9/13
9
experimental set up: specifically, a pseudo-pilotcontrolling
multiple aircraft might take longer torespond than in the actual
situation when the flightcrew is concerned with controlling only
onevehicle, as the pseudo-pilot often had to take sometime to
locate the appropriate flight on the ATGstation.
HandoffsInitially some of the simulation runs were
designed to do handoffs either by voice or by datalink. As the
experiments progressed, the SMEspointed out that handoff events
were often doneautomatically by the flight crew according
topublished procedures for the airports. Since then,the ATG
software was modified to simulate thistype of handoff procedure and
the controllers wouldno longer need to initiate handoffs.
Replanning for New Clearances
Early in the experiments, it was soon obviousthat the existing
route editing functions in GoSAFEwere too time-consuming when the
controllersalready had to deal with the extremely heavy
trafficload. The function introduced later for replanningtiming
constraints was in comparison relativelyeasy to use, and it was
desired by the SMEs.Regarding the need to replan taxi routes, the
SMEshave suggested the ability to generate multipleroutes from
which the controllers could easilychoose. The development of this
function remainsa research topic.
Controller Roles and ResponsibilitiesAll the SMEs who
participated in the
experiments were receptive to the idea of theautomation concept
and their new roles in workingwith the automation system, with the
understandingthat the system used in the experiment was only
anexperimental prototype with incompletefunctionality.
Digital videos were captured for some of thecontroller positions
to provide data for studying thelevel of interactions the
controllers had with the
automation system. Ref. 11 includes some analysesof the data to
reveal how the controllers activitieswere affected by the
automation, though the level ofthese activities may change as the
automationtechnologies mature. One observation is that
theautomation system would likely lead to more head-down activities
and reduce the amount of head-up
time to monitor traffic by looking out the window.This might
have been due to both good or badreasons: there might be more
useful surveillanceand situational data available on the GUI,
butoperating the experimental automation systemmight have required
too much attention.
In any case, additional experiments have beenrun to use only the
automation system in awindowless room, and the SMEs were able
tocontrol the traffic without the benefit of out-the-window view.
This suggests that it may be possibleto provide virtual tower
operations by usingautomation.
Regarding the sharing of responsibilities bytwo controllers over
the jurisdiction of one runway,the SMEs felt that the change did
reduce theworkload of the Local Controller, but they believedthat
it would be possible only with the help of the
automation system, which allowed them tocoordinate tightly timed
but safe operations.
SME feedback exposed some undesirableeffects. They felt that the
automation haddiminished their decision-making role. Futureresearch
will need to focus on redefining thecontrollers role by raising
them to a higher level ofresponsibilities of assuring safe and
efficientoperations under very heavy traffic conditions.This will
require good judgment in rebalancing thefunctions allocated to the
controllers and theautomation.
Impact on Controller WorkloadDuring each 45-min simulated
scenario, the
controllers had to periodically report their perceivedworkload
using a workload assessment keypad, andthen again after the end of
the run through theNASA Task Load Index (TLX)17. The collecteddata
indicates that perceived workload wassignificantly reduced under
advanced automationconditions, more so as the automation
assumedmore functions. Detailed analysis results arediscussed in
Ref. 11.
Information Requirements and PresentationWhereas the experiment
results indicate that
the SMEs were generally receptive to theautomation concept, and
that workload generallydecreased when the controllers were assisted
by thetower automation system, they also revealeddeficiencies in
the current implementation of the
-
7/30/2019 Icns Cheng
10/13
10
GoSAFE prototype. Many of these issues relate towhat type of
information would benefit thecontrollers understanding of the
intent of theautomation system, and how to present theinformation
to the controllers so that the controllerscan act on the GoSAFE
events in a timely manner.These issues have implications on whether
the
GoSAFE clearances can be issued to the flightsconsistently,
which in turn affects whether theGoSAFE plans are effectively
carried out by theflights. Failure to achieve a high level
ofcompliance with GoSAFE plans will lead to adomino effect causing
the collaborative automationconcept to break down.
Development of Flight-Deck
Automation
FARGOs automation functions include the
use of digital communication via data link to acceptclearances
with embedded 4D trajectoryinformation in the taxi route. Advanced
navigationis assumed for the aircraft to interpret the
clearancesand execute the 4D trajectory with
high-precisionperformance. The following summarizes theFARGO
design, with details provided in Ref. 12.
Guidance Function for Trajectory Generation
A guidance function is designed to accept thetaxi route
specified by the clearance with embedded
timing constraints to generate a detailed 4Dtrajectory that the
aircraft is expected to track.This trajectory is more than a route
with requiredtimes of arrival (RTA) at selected points: it is
acomplete trajectory where every point along theway is mapped to a
point in time.
This guidance function takes into considerationairport layout
standards18 with respect to turningrequirements. There are a number
of factors that gointo the computation of the trajectory,
includingturn radii, hold distances, aircraft performance,
andpassenger comfort. The turn radii and hold
distances are based partly on the largest aircraft thatan
airport is expected to handle, and the numbersare therefore defined
for approach categories anddesign groups. The FARGO design imposes
asmooth acceleration profile in defining thetrajectory.
Nonlinear Controller for Aircraft Taxi
Control
A nonlinear controller is designed to generatethe control
signals to effect the 4D-trajectorytracking, based on the Nonlinear
Synthesis Tools19(NST) product. Of the many nonlinear controldesign
techniques included in NST, thefeedbacklinearization methodology is
being considered forthe current FARGO design. NST provides
thenecessary tools in synthesizing a superior nonlinearcontroller
with a software model of the aircraftdynamics embedded in its own
code. The currentFARGO design is being produced for a
B-737-typeaircraft, for which a software model has beenextracted
from NASAs Transport System ResearchVehicle6 (TSRV) simulation.
Performance of thenonlinear controller has been verified based
oncomputer simulations.
Interface for Piloting
Figure 6 illustrates various proposed displaysas part of the
pilot interface. Textual clearance datacan be shown on the Engine
Indication and CrewAlert System (EICAS) displays. The flight
crewhas the option of viewing the route informationextracted from
the pre-clearance on an electronicmoving map (EMM). The head-up
display (HUD)is preferred as a control display to enable the
pilotsto monitor FARGOs performance during auto-taxioperations, and
to enable the pilots to perform
manual taxi control by display control advisoriesfor the pilots
to follow. Figure 7 contains anillustration of the HUD graphical
design proposedto display the FARGO guidance and control data.
Upper EICAS Clearance
Alert
Lower EICAS TextualClearance
Electronic Moving Map Taxi Route Preview Navigation
Traffic Monitoring
Head-Up Display Taxi Control Conflict
Avoidance
Figure 6. FARGO Pilot-Interface Displays
-
7/30/2019 Icns Cheng
11/13
11
MANUALCurrent 8 .0 kts
Required 8.0 kts
16:48:20 ETA
16:48:20 RTA
Alpha 3 | Bravo 2 | Alpha 3
SLOWRight Turn
Max. 8 kts
SLOWRight Turn
Max. 8 kts
Figure 7. Sample HUD Display Format
Traffic Monitor Function
Advanced surveillance services are assumed
that will allow the FARGO automation to detectand react to
potential conflicts with other surfacetraffic. The EMM display as
shown in Figure 8 isappropriate for providing traffic information
andalert in anticipation of conflicts with other vehicles,by
superimposing aircraft icons on the displayshowing locations of the
nearby traffic. It is alsobeneficial to post conflict alerts on the
HUD eventhough the HUDs field of view is limited, since theHUD is
likely the primary display used by the pilotperforming taxi
operations.
Figure 8. Sample EMM Display
Suggestions for Future Research
Concerning the technologies for the SOARconcept, we believe that
the feasibility has beenproven through early prototypes and
experiments.The concept is ready for transition into the nextphase
of development, where full-feature functionsshould be developed
along with experiments to helpshape the operational procedures and
the roles andresponsibilities between operators and automation.The
following is a brief discussion of recommendedresearch
activities.
Technical research should be dedicated tooptimal route planning
to design 4D trajectorieswhich are coordinated for the complete
surfacetraffic. While route optimality is a desirableperformance
metric, it is also desirable to tradesome of the optimality for
inter-flight separationmargins to alleviate the potential impact of
non-
conformance events.
The human-in-the-loop experiments forGoSAFE have revealed the
need for extensiveresearch to define the roles and
responsibilitiesbetween human operators and automaton. Theresearch
needs to be tied to the design of proceduresand user interfaces
that promotes synergy fromoperator/automation interaction.
Procedureresearch also needs to address off-nominalsituations.
It is expected that the tactical automation
functions for trajectory and separation managementbeing studied
with the GoSAFE prototype will needto be integrated with strategic
automation functionsresponsible for airport/airspace configurations
andsurface traffic flow management.
Research and development of flight-deckautomation should
continue with the FARGOdevelopment. Human-in-the-loop
experimentationof the technologies should be included in the
nextphase of research to ensure that human-operatorconsiderations
are addressed early in the process.
As both tower and flight-deck automationsmature, integrated
testing of these technologiesshould follow. Field testing of the
SOARtechnologies should be considered in far-termplanning. The
issue of traffic with mixedequipagei.e., not all aircraft are
equipped withflight-deck automationalso needs to be addressed
-
7/30/2019 Icns Cheng
12/13
12
to study the transition into a highly automatedfuture
environment.
Concluding Remarks
This paper has provided a progress update ofthe Surface
Operation Automation Research
(SOAR) at Optimal Synthesis Inc. SOAR is not asingle research
program, but instead a collection ofresearch activities with the
common goal ofapplying automation technologies to enhanceairport
surface operations. Specifically, the SOARapproach advocates a
concept that involvescollaboration between automation systems in
theAir Traffic Control Tower and the flight deck,making use of
advanced Communication,Navigation, and Surveillance technologies.
Thetower automation makes use of advancedsurveillance data to plan
complete surface traffic
operations in the form of 4D trajectories for allflights, taking
into consideration aircraftperformance data and environmental
conditions.Advanced communication technologies are assumedto
support the issuance of clearances containing the4D trajectories to
the flights via digital data link.The flight-deck automation makes
use of accuratenavigation data to perform the taxi operations
inaccordance with the 4D trajectories embedded inthe
clearances.
Feasibility of the concept has been verifiedthrough simulations
and experiments with early
prototypes of the automation systems. Human-in-the-loop
experiments involving tower-controllersubject experts have been
performed in the lastcouple of years to study operational
procedures inthe control tower, using an experimental prototypeof
the tower automation system. The subject matterexperts have been
generally receptive to theautomation concept, and they have
contributeddirectly in the investigation of new roles
andresponsibilities of tower controllers working withthe
automation. Development of the flight-deckautomation is not as
mature, but an experimental
prototype suitable for human-in-the-loop testing isexpected to
be available in another year.
The progress thus far supports the assertionthat the SOAR
concept can be part of the solution toincrease capacity of the
National Airspace System(NAS). In particular, it can help alleviate
thecongestion problem associated with airports being
the bottleneck of NAS traffic. To pursue thiscollaborative
automation concept further, seriousinvestments will be required for
technologydevelopment for the automation systems. Thispaper has
included suggestions for future researchto identify key areas
essential for the success of theapproach.
References1National Airspace System Operational EvolutionPlan,
Version 8.0, Federal Aviation Administration,December 2002.
2 Cheng, V. H. L., 2002, Collaborative AutomationSystems for
Enhancing Airport Surface TrafficEfficiency and Safety,Proceedings
of the 21stIEEE/AIAA Digital Avionics Systems Conference,
Irvine, CA, Paper 1D4.3 Cheng, V. H. L., 2003, Airport Surface
OperationCollaborative Automation Concept,Proc. AIAAGuidance,
Navigation, and Control Conf., Austin,TX, AIAA Paper 2003-5773.
4 Cheng, V. H. L., 2004, Surface OperationAutomation Research
for Airport Tower and FlightDeck Automation,Proceedings of the 2004
IEEEIntelligent Transportation Systems (2004 ITSC),Washington, DC,
Paper TuC2.4.
5 Cheng, V. H. L., and D. C. Foyle, 2002,
Automation Tools for Enhancing Ground-Operation Situation
Awareness and FlowEfficiency,Proc. AIAA Guidance, Navigation,
andControl Conference, Monterey, CA, AIAA Paper2002-4856.
6 Cheng, V. H. L., V. Sharma, and D. C. Foyle,2001, Study of
Aircraft Taxi Performance forEnhancing Airport Surface Traffic
Control,IEEETrans. Intelligent Transportation Systems, Vol. 2,No.
2.
7 Cheng, V. H. L., A. Yeh, and D. C. Foyle, 2003,
Evaluation plan for an airport surface-operationautomation
concept,Proc. 2003 AIAA AircraftTechnology, Integration, and
Operations (ATIO)
Technical Forum, Denver, CO, AIAA Paper 2003-6796.
8 Cheng, V. H. L., A. Yeh, G. M. Diaz, andD. C. Foyle, 2004,
Surface-Operation Benefits of a
-
7/30/2019 Icns Cheng
13/13
13
Collaborative Automation Concept,Proceedingsof the AIAA
Guidance, Navigation, and ControlConference, Providence, RI, AIAA
Paper 2004-5409.
9 Cheng, V. H. L., 2004, Evaluation Plan for
System-Wide Benefits of an Airport Surface-Operation Automation
Concept,Proceedings ofthe 23rd Digital Aviation Systems
Conference
(DASC), Salt Lake City, UT, Paper 3A4.
10 Cheng, S. Y., Y. G. Seo, V. H. L. Cheng,L. H. Martin, S. A.
Verma, and D. S. Ballinger,2007, Ground Operation Concept
TestingRequirements and Challenges, to be presented,AIAA Modeling
and Simulation Technologies
Conference, Hilton Head, SC, Paper No. AIAA-2007-6701.
11
Martin, L., S. Verma, D. Ballinger, andV. Cheng, 2007,
Developing a Decision SupportInterface for Surface Domain Air
TrafficControllers, to be published in theProceedings ofthe Human
Factors and Ergonomics Societys 51st
Annual Meeting, Baltimore, MD.
12 Sweriduk, G. D., V. H. L. Cheng, A. D. Andre,and D. C. Foyle,
2007, Automation Tools forHigh-Precision Taxiing, submitted for
presentationat the 26th Digital Avionics Systems Conference,Dallas,
TX.
13
FAA Airport Benefit-Cost Analysis Guidance,Office of Aviation
Policy and Plans, FederalAviation Administration, December 15,
1999.
14 Atkins, S., C. Brinton, and D. Walton, 2002,Functionalities,
Displays, and Concept of Use forthe Surface Management
System,Proceedings ofthe 21st Digital Avionics Systems
Conference,Irvine, CA, Paper 1.D.6.
15 Concept of Operations for the Next GenerationAir
Transportation System, Version 1.2 (Draft 5),Joint Planning and
Development Office, February
28, 2007.16 Dorighi, N. S., and B. T. Sullivan,
2003,FutureFlight Central: A Revolutionary Air TrafficControl Tower
Simulation Facility,Proceedings ofthe AIAA Modeling and Simulation
Technologies
Conference, Austin, TX, Paper AIAA-2003-5598.
17 Hart, S. G., and L. E. Staveland, 1988,Development of
NASA-TLX (Task Load Index):Results of Empirical and Theoretical
Research, inP. A. Hancock and N. Meshkati (Eds.),HumanMental
Workload, pp. 239250, Amsterdam: NorthHolland Press.
18 Airport Design, Federal AviationAdministration Advisory
Circular 150/5300-13, U.S. Dept. of Transportation, Sept. 29,
1989.
19 Nonlinear Synthesis Tools Users Manual,Optimal Synthesis
Inc., 2000.
2007 ICNS Conference
1-3 May 2007