Embed Size (px)
Citation preview

Introducción a Modellus
Versión 1.11 (Julio de 1996) © Faculdade de Ciências y Tecnologia, Universidade Nova de Lisboa
Vitor Duarte Teodoro
João Paulo Duque Vieira
Filipe Costa Clérigo Versión de la VII Conferencia Interamericana sobre Educación en Física adaptada por: Rejane Maria Ribeiro Teixeira Eliane Angela Veit Departamento de Física Universidade Federal do Rio Grande do Sul Traducida al español por: Pablo A. Lonngi V. Departamento de Física Universidad Autónoma Metropolitana, Iztapalapa Revisión: Octubre 2002.
1

2

Prácticas con modelos matemáticos en Física y Matemática
Introducción al Modellus
Vitor Duarte Teodoro, João Paulo Duque Vieira y Filipe Costa Clérigo (Adaptado por Rejane Ribeiro Teixeira y Eliane Angela Veit para la VII Conferencia
Interamericana sobre Educación en Física) (Traducido por Pablo A. Lonngi V.)
CONTENIDO
1. Sobre el Modellus ......................................................................................................................4
2. Qué es Modellus ........................................................................................................................5
3. Pre-requisitos e instalación de Modellus................................................................................6
4. Ejemplos incluídos en el disquete .............................................................................................6
5. Informaciones útiles para la construcción de modelos .........................................................10
5.1 Sintaxis de los modelos.......................................................................................................10
5.2 Funciones reconocidas en la ventana «Modelo»..............................................................14
5.3 Instrucciones de control reconocidas en la ventana «Modelo» ......................................14
6. Actividades sugeridas ..............................................................................................................15
7. ANEXO ....................................................................................................................................27
Directorio Estoril......................................................................................................................27
Directorio Rolland....................................................................................................................27
Carpeta Veit..............................................................................................................................28
3
1. Sobre el Modellus Este texto está dirigido a profesores de Matemática y de Ciencias Físico-Químicas, y a alumnos de enseñanza secundaria, media superior y de enseñanza superior. Modellus fue concebido por Vitor Duarte Teodoro con la colaboración de João Paulo Duque Vieira y Filipe Costa Clérigo y programado en lenguaje C++ por João Paulo Duque Vieira y Filipe Costa Clérigo. Los autores autorizan la copia del programa para fines educativos, en Portugal. Cualquier comentario o sugestión sobre el programa puede enviarse por correo electrónico para [email protected] o por correo normal para Vitor Duarte Teodoro, Faculdade de Ciencias y Tecnologia, 2825 monte de Caparica. Está disponible en Internet un servidor de apoyo al programa, con documentación, foros de discusión, ejemplos, descarga de nuevas versiones, etc. La dirección en Internet es
http://phoenix.sce.fct.unl.pt/Modellus Modellus recibió el primer premio en el concurso de software de la revista Computers in Physics, de la American Physical Society (1996). Agradecimientos: El desarrollo de este programa sólo fue posible gracias al ambiente de permanente estímulo intelectual durante el Proyecto MINERVA (1985-1994), creado por la mayoría de los profesores de los varios niveles de enseñanza que colaboraron en él. El apoyo de empresas informáticas (ICL, IBM, Olivetti, Cebit, Unisys) y del EP-GEF (Ministério de la Educação), célebremente a través del otorgamiento de premios a otros títulos de software, fue también de fundamental importancia. Un agradecimiento especial se debe a Miguel Sousa Lobo, coautor de Dinamix.
4

2. Qué es Modellus
2.1 Prácticas con modelos matemáticos. La computadora se convirtió, en las últimas tres décadas, en un instrumento esencial en la investigación, en prácticamente todas las áreas científicas. Por varias razones, ese cambio no se ha dado todavía en el aprendizaje de las Ciencias y de la Matemática. Con la creciente accesibilidad a computadoras personales cada vez más potentes y con interfaces de fácil utilización, parece haber llegado la hora de tornar a la computadora como un instrumento fundamental para aprender Ciencias y Matemática. La idea-base en la concepción del Modellus es la de permitir a alumnos y profesores realizar prácticas con modelos matemáticos. La complejidad de muchos de los modelos matemáticos es, muchas veces, sólo aparente. En realidad, lo que frecuentemente es complejo es el proceso de cálculo, no el significado de los modelos. Modellus se encarga de resolver la complejidad de los cálculos, liberando al usuario para reflexionar sobre el significado de los modelos y de sus implicaciones.
2.2. Las computadoras en Ciencias y Matemática como instrumento de medida, de cálculo, de modelación y de simulación De las varias modalidades de utilización de la computadora en la enseñanza de las Ciencias y de la Matemática, se destaca la utilización como instrumento de medida y adquisición de datos (con sensores y software adecuado para la adquisición de datos y su respectiva representación) y la modelación, así como la utilización como instrumento de cálculo y de simulación. Estas varias modalidades son complementarias y pueden ser llevadas a la práctica en el mismo programa. Modellus es, simultáneamente, una herramienta de modelación, de simulación y de cálculo. Las versiones siguientes del Modellus tendrán también algunas funciones de adquisición de datos, por ejemplo, la posibilidad de funcionar como osciloscopio, un equipo hoy indispensable en cualquier laboratorio. Modellus permite investigar la gran mayoría de temas estudiados en Matemática y Física, y una buena parte de los temas de otras ciencias (desde la Biología hasta la Economía) que manejan modelos cuantitativos.
2.3 Modellus: un producto de investigación en educación en Ciencias y Matemática Modellus es el resultado de más de diez años de investigación y desarrollo en software educativo exploratorio realizado en la Facultad de Ciencias y Tecnología de la Universidad Nueva de Lisboa (Monte de Caparica, Almada). La oferta de este programa a las escuelas traduce el compromiso de la FCT en colaborar en la renovación de la enseñanza y del aprendizaje de las Ciencias y de la Matemática, una renovación que parece cada vez más imprescindible.
2.4 Modellus: un sistema de autor… Una característica importante de Modellus es la posibilidad de funcionar como «sistema de autor», esto es, permitir al profesor preparar la representación de un «modelo» complejo que puede ser utilizado por alumnos que todavía no dispongan de los conocimientos necesarios para comprender la naturaleza matemática del modelo. Por ejemplo, un profesor de Física puede preparar un modelo sobre el movimiento de la Luna alrededor de la Tierra, utilizando ecuaciones diferenciales, y utilizarlo con alumnos de secundaria o preparatoria, que sólo tienen acceso a las animaciones, estando el modelo inaccesible a los alumnos.
2.5 Una vasta gama de utilizaciones… Otra característica importante de Modellus es la posibilidad de su utilización desde la enseñanza básica (e.g., relaciones de proporcionalidad) hasta tópicos avanzados (e.g., resolución de sistemas de ecuaciones diferenciales ordinarias) en todas las disciplinas que manejan modelos cuantitativos (con funciones, ecuaciones diferenciales, integraciones, iteraciones, etc.). De este modo, el alumno puede familiarizarse gradualmente con el programa.
5

3. Pre-requisitos e instalación de Modellus 3.1 El usuario de Modellus debe estar suficientemente familiarizado con el ambiente Windows 3.1 (o Windows 95 o Windows 98). 3.2 Para instalar Modellus es necesario disponer de una computadora compatible con un procesador 486 o Pentium y un mínimo de 4 Mb de RAM (8 Mb de preferencia) y cerca de 3 Mb de espacio en disco disponible. 3.3 La instalación se hace ejecutando el archivo INSTALAR. Durante la instalación se crea un directorio MODELLUS, en la raíz del disco duro, con varios subdirectorios con ejemplos (MAT_BAS, con ejemplos de Matemáticas en nivel de enseñanza básica; MAT_SEC, ejemplos de Matemáticas para la enseñanza secundaria; MAT_SUP, ejemplos de Matemáticas para la enseñanza superior; FIS_BAS, ejemplos de Física para la enseñanza básica; FIS_SEC, ejemplos de Física para la enseñanza secundaria; FIS_SUP, ejemplos de Física para la enseñanza superior; QUIM_SEC ejemplos de Química para la enseñanza secundaria y superior) así como los directorios (IMAGENS y FUNDOS) donde se encuentran algunas imágenes utilizadas en diversos modelos. Nota de P. Lonngi: Modellus sólo acepta nombres de archivos y carpetas cortos, con un máximo de 8 caracteres.
4. Ejemplos incluídos en el disquete
4.1 Cómo ver los ejemplos: menú «Modelo», opción «Leer…» Una vez instalado el programa, se ejecuta el archivo «Modellus» y se selecciona el primer menú, Modelo, opción Leer…. En seguida se entra en uno de los varios directorios y se carga un archivo. Para ejecutar un ejemplo, se utiliza el primer botón de la izquierda de la ventana Control, el botón «Comenzar», semejante al botón «Play» (reproducir) de una grabadora de video o de audio: Nota: el texto de algunos modelos no es accesible.
4.2 Lista de ejemplos. (Nota de P. Lonngi: Véase el anexo para ejemplos de otros autores, a saber, Estoril, Rolland y Veit en las carpetas del mismo nombre.) Directorio: ARTE (Matemáticas, enseñanza secundaria, prácticas de «arte matemático»)
Archivo Descripción A1.MDL «Práctica» con funciones trigonométricas A2.MDL «Práctica» con funciones trigonométricas
A3.MDL «Práctica» con la función cuadrática
SOL.MDL Un «Sol» con funciones trigonométricas
Directorio: MAT_BAS (Matemática, enseñanza básica)
Archivo Descripción PROP_DIR.MDL Representación gráfica de una relación de proporcionalidad directa
PROP_INV.MDL Representación gráfica de una relación de proporcionalidad inversa
6

Directorio: MAT_SEC (Matemática, enseñanza secundaria)
Archivo Descripción CIRCUNF.MDL Construir una circunferencia con dos funciones COSENO1.MDL Gráfica de la función coseno DER1.MDL Sobre el concepto de derivada DERIV1.MDL Derivada y pendiente (función cuadrática) DERIV2.MDL Derivada y pendiente (función coseno) ELIPSE1. Construir una elipse con dos funciones EQ_DIF1.MDL Comparación de dos ecuaciones diferenciales simples EQ_V_RE.MDL Ecuación vectorial y ecuación reducida de la recta F_SINUD.MDL Estudio de una función senoidal FUN_QUA2.MDL Estudio de los ceros de la función cuadrática FUN_QUAD.MDL Estudio de la función cuadrática HIPERB1.MDL Sobre hipérbolas INEQ1.MDL Resolución gráfica de un sistema de dos desigualdades INTEGR1.MDL Introducción al concepto de integral RADIANO.MDL Introducción al concepto de radián RECTAV.MDL Animación de la ecuación vectorial de una recta RECTAV2.MDL Comparación de la ecuación vectorial de la recta con la respectiva ecuación
reducida SERIE1.MDL Sobre límites SOL_EQ.MDL Solución gráfica de ecuaciones trigonométricas SOM_VECT.MDL Suma de vectores en un plano SUC_E.MDL Sobre sucesiones SUCESS1.MDL Sobre sucesiones SUCESS2.MDL Sobre sucesiones
Directorio: MAT_SUP (Matemática, enseñanza superior)
Archivo Descripción CARDOID.MDL Un «corazón» con ecuaciones paramétricas CHAP676.MDL Una ecuación diferencial representando un reactor químico con alimentación
constante CHAP677.MDL Una ecuación diferencial que representa un reactor químico con alimentación
oscilante CHAP679.MDL Resolución de un sistema de cinco ecuaciones diferenciales ordinarias INTEG1.MDL Cálculo de una integral por la regla de Simpson INTEGR.MDL Cálculo de una integral INTEGR1.MDL Cálculo de una integral LORENZ.MDL Ecuaciones de Lorenz SOL_NEWT.MDL Solución de una ecuación por el método de Newton-Raphson
7
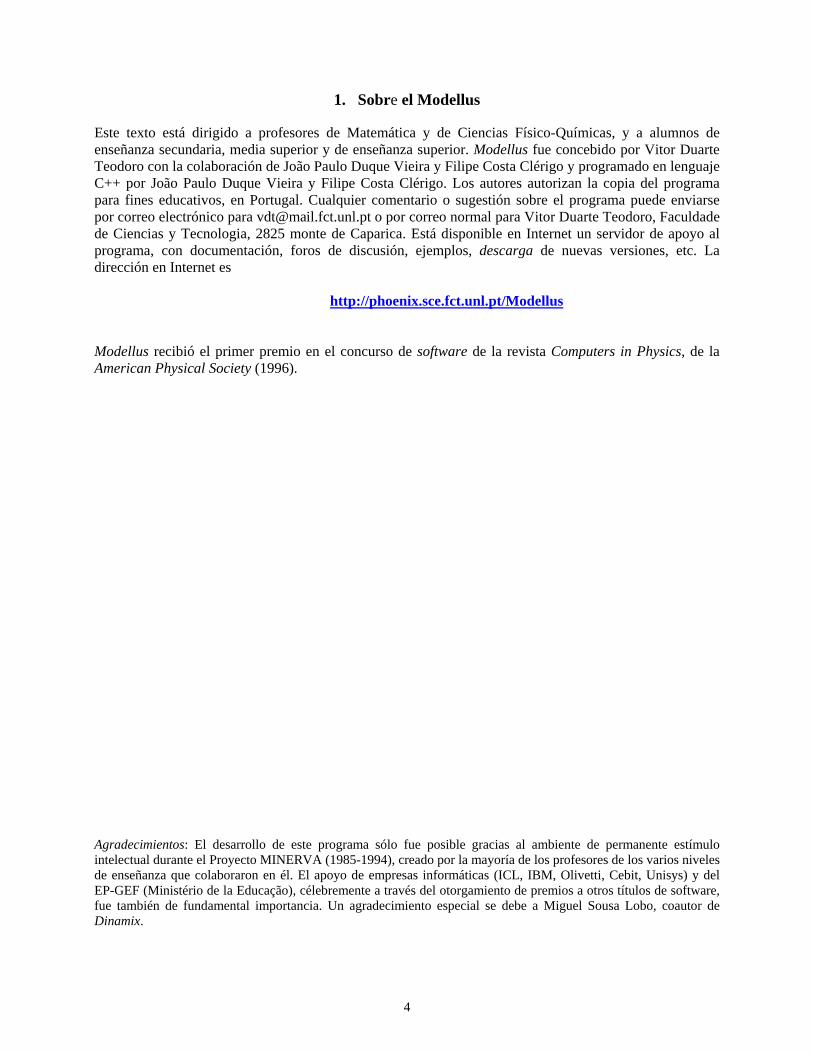
Directorio: FIS_BAS (Física, enseñanza básica)
Archivo Descripción ACEL1.MDL Sobre el concepto de aceleración CARRO_AC.MDL Acelerar y detener un carro GRAFPOS1.MDL Gráfica de posición en función del tiempo LUA.MDL Velocidad y fuerza gravitacional en el movimiento de la Luna MOV2DF.MDL Mover al Santa Claus… hasta el origen del sistema de referencia POS_DIST.MDL Posición y distancia recorrida RADIOAC.MDL Transformación radioactiva y vida media RATO1.MDL Mover el «ratón» de la computadora e investigar el concepto de coordenada de
posición y de velocidad (movimiento rectilíneo) RATO2.MDL Mover el «ratón» de la computadora e investigar el concepto de coordenada de
posición y de velocidad (movimiento en un plano) Directorio: FIS_SEC (Física, enseñanza secundaria)
Archivo Descripción CAMPEL1.MDL Campo eléctrico producido por una carga CAMPEL2.MDL Campo eléctrico producido por dos cargas CAMPEP1.MDL Potencial eléctrico producido por una carga CAMPGE1.MDL Energía potencial gravitacional CAMPGP1.MDL Potencial gravitacional CAMPGR1.MDL Campo gravitacional producido por un planeta CAMPGR2.MDL Campo gravitacional producido por dos planetas CIRC_C.MDL Circuito de corriente alterna con un generador y un condensador CIRC_L.MDL Circuito de corriente alterna con un generador y una bobina CIRC_LC.MDL Oscilador electromagnético (circuito con un condensador y una bobina) CIRC_R.MDL Circuito de corriente alterna con un generador y un resistor CIRC_RLC.MDL Circuito de corriente alterna con un generador, un resistor, un condensador y una
bobina CIRC1.MDL Movimiento circular uniforme CIRC2.MDL Movimiento circular uniforme CM_MOV1.MDL Movimiento del centro de masa de dos partículas que se mueven con diferente
velocidad CM1.MDL Movimiento del centro de masa de un halterio lanzado oblicuamente COLIS1.MDL Colisión perfectamente elástica en una dimensión CONDENS1.MDL Carga y descarga de un condensador CORDA.MDL Movimiento de un cuerpo suspendido de una cuerda DESDIST1.MDL Desplazamiento y distancia recorrida en un movimiento circular uniforme GRAF_E1.MDL Gráfico de la función campo eléctrico GRAF_G1.MDL Gráfico de la función campo gravitacional GRAFPOS1.MDL Posición y distancia recorrida GRAV_LUA.MDL Reproducción del razonamiento de Newton acerca del movimiento de la Luna
alrededor de la Tierra (aplicación del cálculo infinitesimal) GRAV1.MDL Velocidad y aceleración en el movimiento de un satélite JOGGRA1.MDL Un juego de gravitación JOGGRA2.MDL Otro juego de gravitación KEPLER1.MDL Segunda ley de Kepler
8

9
Directorio: FIS_SEC (Cont.) (Física, enseñanza secundaria)
Archivo Descripción M_REL_1.MDL Movimiento relativo: ver el paisaje al avanzar MOMENT1.MDL Investigación del movimiento de rotación de una barra sobre la que se ejerce una
fuerza de valor constante en el extremo MOMENT2.MDL Investigación del movimiento de rotación de una barra controlando el momento
de la fuerza MOV_R_AV.MDL Lanzamiento de una caja desde un avión en movimiento MOV_REL1.MDL Prácticas sobre movimiento relativo MOV_REL2.MDL Prácticas sobre movimiento relativo MOV_REL3.MDL Prácticas sobre movimiento relativo MOV_REL4.MDL Prácticas sobre movimiento relativo MOV_REL5.MDL Prácticas sobre movimiento relativo MOV_REL6.MDL Prácticas sobre movimiento relativo MOV2DF.MDL Mover el Santa Claus… MOVCIRC1.MDL Movimiento de una partícula en el extremo de la manecilla de los segundos MOVCIRC2.MDL Vector-posición, velocidad y aceleración en el movimiento circular uniforme MOVREC1.MDL Vector-posición y ecuaciones paramétricas en un movimiento rectilíneo MOVREC2.MDL Tres casos de movimiento rectilíneo NAT_QUED.MDL La caída del Santa Claus… ONDAEM.MDL Representación de una onda electromagnética OSCILAH.MDL Un oscilador horizontal OSCILAV.MDL Un oscilador vertical OSCILOSC.MDL Investigar un osciloscopio PARAQ1.MDL Movimiento de un paracaidista, sin abrir el paracaídas PARAQ2.MDL Movimiento de un paracaidista, antes y después de abrir el paracaídas PEND_CON.MDL Péndulo cónico PENDULO1.MDL Péndulo simple, fuerzas, aceleración, componentes de la aceleración y velocidad PLANO30.MDL Movimiento en un plano, con y sin fricción PRJ_MESA.MDL Lanzamiento de una esfera desde una mesa PRJ_RESI.MDL Proyectil, con resistencia del aire PRJBAS1.MDL Lanzamiento de una pelota de basquet PRJTEN1.MDL Lanzamiento de una bola de tenis PROD_FEM.MDL Ley de Faraday y producción de fuerza electromotriz PROJ_AC.MDL Aceleración y velocidad en el movimiento de un proyectil PROJ_EN.MDL Energía en el movimiento de un proyectil PROJ0.MDL Lanzamiento horizontal de un proyectil PROJ1.MDL Velocidad, aceleración y fuerza en el movimiento de un proyectil PROJ2.MDL Ecuaciones paramétricas y movimiento de un proyectil PROJ45.MDL Lanzamiento de un proyectil a 45° PTOLOMEU.MDL Representación del movimiento de un planeta, según Ptolomeo QUEDANAT.MDL El aterrizaje del Santa Claus… RADIANO.MDL Sobre el concepto del radián ROTAC1.MDL Movimiento de rotación con aceleración angular constante SAT_ESCA.MDL Un estudio sobre la velocidad de escape de un satélite SATELITE.MDL Colocar un satélite en órbita VECDES1.MDL Vector desplazamiento en un movimiento rectilíneo VEL1.MDL Sobre el concepto de velocidad VEL2.MDL Velocidad y aceleración en un lanzamiento vertical hacia arriba VEL4.MDL Velocidad y vector-posición en el movimiento de un proyectil

10
Directorio: FIS_SUP (Física, enseñanza superior)
Archivo Descripción 3BPROB.MDL Una práctica sobre el problema de los tres cuerpos FORC_OSC.MDL Un estudio del oscilador forzado LISSAJOU.MDL Figuras de Lissajous CIRC_C.MDL Circuito de corriente alterna con un generador y un condensador CIRC_L.MDL Circuito de corriente alterna con un generador y una bobina CIRC_LC.MDL Oscilador electromagnético (circuito con un condensador y una bobina) CIRC_R.MDL Circuito de corriente alterna con un generador y un resistor CIRC_RLC.MDL Circuito de corriente alterna con un generador, un resistor, un condensador y una
bobina CONDENS1.MDL Carga y descarga de un condensador GRAV_LUA.MDL Reproducción del razonamiento de Newton acerca del movimiento de la Luna
alrededor de la Tierra (aplicación del cálculo infinitesimal) IO_IO_PL.MDL Un yo-yo con planetas…
Directorio: QUIMICA (Química, enseñanza secundaria y superior)
Archivo Descripción ORBITAIS.MDL Funciones de onda R_ABIR.MDL Reacción irreversible R_ABRE.MDL Reacción reversible y equilibrio químico
5. Informaciones útiles para la construcción de modelos
5.1 Sintaxis de los modelos 1. Cada línea debe tener una sola expresión. 2. Una línea puede tener sólo el nombre de una variable. El primer valor de esta variable es 0, por defecto, pero puede ser alterado en la ventana Condiciones. Cuando el modelo está siendo ejecutado, el valor de esa variable puede alterarse controlando un objeto (partícula, vector, barra, manecilla, valor, en cualquier ventana de animación). Ver, por ejemplo, el archivo GRAFPOS1.MDL en el Directorio FIS_SEC. 3. El nombre de una variable sólo puede contener caracteres alfanuméricos, comenzando por una letra. El intérprete de los modelos distingue entre mayúsculas y minúsculas. 4. Para interpretar un modelo, se presiona el botón Interpretar, en la ventana Modelo. La asignación de valores a los parámetros y a los valores iniciales sólo puede hacerse después de que el modelo ha sido interpretado. 5. Para escribir potencias utilice «^» o el primer botón en la parte superior de la ventana Modelo. Una raíz cuadrada puede obtenerse presionando el botón respectivo o utilizando la tecla «#». Si el argumento de la raíz cuadrada tuviera más de un elemento, se escribe un «(» después de escribir el símbolo de la raíz, y se termina la expresión con «)». Las fracciones se obtienen utilizando la tecla «/». Si el numerador o el denominador contienen más de un elemento, se utilizan paréntesis para iniciar y terminar el numerador o el denominador. 6. Siempre debe escribirse el símbolo de multiplicación, que se obtiene presionando «*» o la barra espaciadora.

7. Los números π (π= 3.1415926535897932384623536…) y e (la base de los logaritmos naturales o neperianos (e = 2.71828182845904523536…) se obtienen presionando el respectivo botón en la parte superior de la ventana Modelo o escribiendo «PI» o «e». Estos símbolos no pueden ser utilizados para designar otras variables o parámetros. «π» sale en la ventana Modelo como PI :
8. Las variables y los parámetros se escriben en itálicas o cursivas (verde), los números en negro y las funciones en negritas.
9. Las funciones deben indicarse de modo explícito. Ej.:
10. Para calcular la derivada de una función, ésta debe ya estar definida en cualquier línea anterior. Se pueden calcular derivadas de derivadas, derivando la variable a la que corresponde la derivada de orden inmediato inferior. Ej.:
11. No es posible calcular la derivada de una función que no sea una función explícita de la variable con respecto a la cual se está calculando la derivada.
11

12. Para calcular el cambio o variación de cualquier variable, se utiliza el operador «∆», que se obtiene presionando el botón respectivo en la parte superior de la ventana Modelo o presionando la tecla «∆». El argumento de «∆» es una variable, no una expresión. Para calcular tasas o razones de cambio o de variación, se divide el cambio de una variable por la variación de otra variable. Ej.:
13. La variable independiente se designa por t, por defecto. Puede utilizarse otra letra, como por ejemplo x, presionando el botón Opciones… en la ventana Control. En la caja de diálogo del botón Opciones… se puede también definir el dominio de la variable independiente, la precisión de los resultados en las diversas ventanas, el paso de la variable independiente, el modo de expresar ángulos (radianes o grados) y si el modelo es iterativo. 14. Los modelos iterativos no tienen explícita ninguna variable independiente. En este tipo de modelos, la barra en la ventana Control representa sólo el número de pasos. 15. Se pueden escribir ecuaciones iterativas en modelos «normales». Ej:
16. Cualquier ecuación con derivadas (es decir, ecuación diferencial del primer orden, P.L.) debe ser escrita como una tasa instantánea de variación igual a una expresión, variable o parámetro. Ej.:
12

17. Se pueden escribir ecuaciones con derivadas de derivadas escribiendo cada tasa instantánea de variación en líneas diferentes. Ej.:
18. Modellus resuelve las ecuaciones con derivadas utilizando un método numérico (llamado método de Runge-Kutta de 4.º orden), siendo 0.1 el «paso», por defecto. Este método da soluciones exactas para la mayoría de las ecuaciones. Si es necesario (por ejemplo, cuando el intervalo de la variable independiente es muy pequeño), se debe modificar el paso para valores inferiores al intervalo que va a tomar la variable independiente. 19. Modellus reconoce números entre –10 E60 (–10X10 60
) y 10 E60 (10x10 60 ). Los valores menores al paso, en 7 órdenes de magnitud, se consideran como siendo 0, para efectos de verificación en cálculos imposibles. 20. El programa no se detiene cuando encuentra un número imaginario (raíz cuadrada de un número negativo) en alguna de las variables. Ese número aparece como «--» en las tablas y en las ventanas de animación y no se representa en las ventanas de gráficos. E.g.:
21. Para escribir comentarios en la ventana Modelo, comenzar una línea con «;».
13

14
5.2 Funciones reconocidas en la ventana «Modelo»
función Descripción sintaxis (ejemplo) sqrt ( ) raíz cuadrada sqrt (2) sin ( ) o sen ( ) seno sin(2×π×f×t) cos ( ) coseno cos (2×π×f×t) tan ( ) tangente tan (5) sec ( ) secante sec (2) arcsin ( ) o arcsen ( ) arco seno arcsin (0.5) arccos ( ) arco coseno arccos (0.5) arctan ( ) arco tangente arctan (0.5 ) ln ( ) logaritmo natural ln (5) log ( ) logaritmo decimal log (10)
rnd ( ) número aleatorio [genera números
aleatorios entre 0 y 100] rnd (100)
abs ( ) módulo o valor absoluto abs (– 5) (Nota de P. Lonngi: La versión 2.01 de Modellus incorpora funciones adicionales, como el seno hiperbólico, el coseno hiperbólico y la tangente hiperbólica, así como el redondeo y el factorial de un número. Para mayor información, consúltese la ayuda de Modellus, en particular, la parte Syntax (Reference).)
5.3 Instrucciones de control reconocidas en la ventana «Modelo»
Instrucción (ejemplo) Instrucción if (t < 10) then ( α = 0.5) Si la variable t fuera menor que 10, la variable α es
0.5. Nótese que si no existe otra instrucción, la variable α será siempre 0.5
if (t > 10) then (α = 0.5) Si la variable t fuera mayor que 10, la variable α es 0.5
if (t <> 10) then (α = 0.2) Si la variable t fuera diferente de 10, la variable α es 0.2
if (t = = 10) then (α = 0.5) Cuando t es 10, α es 0.5. Nótese el doble igual, «= =» if (t >= 10) then (α = 0.2) Si la variable t fuera mayor o igual a 10, la variable α
es 0.2 if (t <= 10) then ( α = 0.2) Si la variable t fuera menor o igual a 10, la variable α
es 0.2. Nótese que si no existe otra instrucción, la variable α será siempre 0.2
if ((t > 10) and (r < 5)) then (α = 0.5) Si la variable t fuera mayor que 10 y la variable r fuera menor que 5, la variable α será 0.5
if ((t > 10) or (r < 5)) then (α = 0.5) Si la variable t fuera mayor que 10 o la variable r fuera menor que 5, la variable α será 0.5
(Nota de P. Lonngi: En la versión 2.01 de Modellus existen formas de condicionales un poco más complejas en que se pueden hacer asignaciones de valores a más de una variable o se puede hacer que el programa haga una pausa o se detenga. Para mayor información, consúltese la ayuda de Modellus, en particular, la parte Syntax (Reference).

6. Actividades sugeridas Los modelos correspondientes a las actividades sugeridas abajo están en la carpeta Atividades, que debe ser copiada del disquete al subDirectorio c:\Modellus\Atividades.
6.1 Coseno de ángulos y vectores
6.1.1 COSENO1.MDL ¿Entre qué valores varía el coseno de un ángulo?
a. Ejecutar el modelo y utilizar el «ratón» (con el botón izquierdo presionado) para desplazar el extremo superior
de la hipotenusa (lado azul). Observar cómo varía el triángulo, el complemento de cada uno de sus lados y el cociente entre el cateto rojo y la hipotenusa.
b. ¿Cómo se puede definir el coseno de un ángulo? c. ¿En qué condiciones es negativo el coseno del ángulo? d. ¿En qué condiciones es positivo el coseno del ángulo? e. ¿Puede el coseno del ángulo ser mayor que 1? ¿Por qué? f. ¿Puede el coseno del ángulo ser menor que – 1? ¿Por qué? g. ¿Qué ángulo tiene coseno nulo? ¿Por qué?
6.1.2 COSENO2.MDL Definición de coseno de un ángulo.
a. Ejecutar el modelo y observar cómo varía el triángulo, el complemento de cada uno de sus lados y el cociente
entre el cateto azul y la hipotenusa. b. ¿Cuál es el ángulo entre la hipotenusa y el cateto azul? c. À medida que el triángulo se hace menor, todos los lados del triángulo disminuyen. ¿Qué pasa con el cociente
del complemento del cateto azul entre la hipotenusa? d. ¿Cómo se puede definir el coseno de un ángulo? e. Utilizar los botones pequeños de color en la parte superior izquierda de la ventana de animación para ver otras
situaciones (ángulos de 45º y 60º).
6.1.3 VETOR1.MDL Componentes de un vector y módulo del vector.
a. Observar cómo se calcula el módulo del vector. ¿En qué teorema se basa ese cálculo? b. ¿Cuáles son las componentes del vector? c. Arrastrar el extremo (flecha) del vector (con el «ratón» y utilizando el botón izquierdo) y observar ¿cómo varía
el módulo del vector a medida que varían las componentes del vector? d. ¿En qué condiciones son negativas ambas componentes del vector? e. ¿Puede el módulo del vector ser negativo? ¿Por qué? f. ¿Puede la componente xx ser negativa? Dar ejemplos. g. ¿Puede la componente yy ser negativa? Dar ejemplos.
6.1.4 SOMA_VE.MDL Suma de dos vectores.
a. Ejecutar el modelo. Después de ejecutado, manipular el extremo (flecha) del vector amarillo (o del vector azul)
y observar el vector suma. b. ¿Cómo se puede aumentar el módulo del vector suma sin aumentar el módulo de cualquiera de las partes (esto
es, el módulo de los vectores amarillo y azul)? c. ¿En qué condiciones es nula la suma de dos vectores? d. ¿En qué condiciones tiene el menor módulo posible la suma de dos vectores, con un cierto módulo?
15

16
6.2 Movimientos y fuerzas
6.2.1 MOVREC1.MDL Movimiento rectilíneo con velocidad constante. Representación de la velocidad, de la distancia recorrida y
de las gráficas distancia recorrida en función del tiempo y módulo de la velocidad en función del tiempo, gráficas de s(t) y v(t).
a. Ejecutar el modelo y observar con atención las magnitudes y las gráficas. b. ¿Qué tipo de trayectoria tiene el Santa Claus en este movimiento? c. ¿Cuál es la distancia recorrida por el Santa Claus en un segundo? d. ¿Y en 5 segundos? e. ¿Cómo se puede calcular la distancia recorrida al fin de t segundos? f. ¿Cuál es la magnitud de la velocidad (o rapidez) media del Santa Claus? g. Y ¿cuál es el módulo o magnitud de la velocidad del Santa Claus en cada instante? h. ¿Cuál es el módulo de la aceleración del Santa Claus? ¿Por qué? i. Caracterizar a la resultante de las fuerzas sobre el Santa Claus (dirección, sentido y módulo).
6.2.2 MOVREC2.MDL Movimiento rectilíneo con aceleración constante. Representación de la velocidad, de la aceleración y de la
distancia recorrida y de las gráficas distancia recorrida en función del tiempo, módulo de la velocidad en función del tiempo y módulo de la aceleración en función del tiempo.
a. Ejecutar el modelo y observar con atención las cantidades y las gráficas. b. ¿Qué tipo de trayectoria tiene el Santa Claus en este movimiento? c. ¿Cuál es la distancia recorrida por el Santa Claus en 14 segundos? d. ¿Cuál es la distancia recorrida por el Santa Claus en los primeros 5 segundos? e. Manejando la barra del tiempo, indicar la distancia recorrida por el Santa Claus en los primeros 10 segundos. f. ¿Cuál es el módulo de la velocidad del Santa Claus al final de 14 s? g. ¿Cuál es el módulo de la velocidad del Santa Claus al final de 5 s? h. ¿Cuál es el módulo de la velocidad del Santa Claus al final de 10 s? i. Caracterizar a la aceleración (dirección, sentido y módulo) del Santa Claus. j. ¿Cómo se puede calcular la velocidad del Santa Claus al final de t segundos? k. ¿Cómo se puede calcular la distancia recorrida al final de t segundos?
6.2.3 QUEDA1.MDL, QUEDA2.MDL, QUEDA3.MDL, QUEDA4.MDL Distancia recorrida, velocidad y aceleración en la caída de una bola.
a. Ejecutar el modelo y observar con atención las cantidades y las gráficas. b. ¿Qué tipo de trayectoria tiene la bola en este movimiento? c. ¿Cuál es la distancia recorrida por la bola en 3 segundos? d. ¿Cuál es la distancia recorrida por la bola en el primer segundo? e. ¿Cuál es la distancia recorrida por la bola en los primeros 2 segundos? f. ¿Cuál es el módulo de la velocidad de la bola al final de 3 s? g. ¿Cuál es el módulo de la velocidad de la bola al final de 2 s? h. ¿Cuál es el módulo de la velocidad de la bola al final de 1 s? i. Caracterizar a la aceleración (dirección, sentido y módulo) de la bola. j. Caracterizar a la fuerza (dirección, sentido y módulo) que se ejerce sobre la bola. k. ¿Cómo se puede calcular la velocidad de la bola al final de t segundos? l. ¿Cómo se puede calcular la distancia recorrida al final de t segundos?

6.2.4 X_V_S_1.MDL, V_A_1.MDL Posición, módulo de la velocidad y distancia recorrida en un movimiento retardado y después acelerado.
a. Ejecutar el modelo y observar con atención las cantidades y las gráficas. b. ¿Cómo varía la distancia recorrida por el Santa Claus? c. ¿Cómo varía el módulo de la velocidad del Santa Claus en los primeros 10 segundos? d. ¿Cómo varía el módulo de la velocidad del Santa Claus después de los primeros 10 segundos? e. Caracterizar la dirección y el sentido de la aceleración en los primeros 10 segundos. f. Caracterizar la dirección y el sentido de la aceleración después de los primeros 10 segundos. g. Calcular el módulo de la aceleración, teniendo en cuenta los datos de la gráfica tiempo-velocidad. h. La posición del Santa Claus es la distancia al punto de partida. ¿Cómo varía la posición a lo largo de todo el
movimiento? i. ¿Cuál de las gráficas, tiempo-posición o tiempo-distancia recorrida, nos dá más informaciones sobre el
movimiento? ¿Por qué?
6.2.5 MOV_H1.MDL ¿Cuál es la «historia» de este movimiento? (Observando la gráfica del módulo de la velocidad en función
del tiempo).
a. Ejecutar el modelo y observar con atención las cantidades y las gráficas. b. Describir este movimiento. c. ¿Cómo varía el módulo de la velocidad a lo largo del tiempo? d. ¿Cómo varía el módulo de la aceleración a lo largo del tiempo? e. ¿Cómo varía la aceleración a lo largo del tiempo? f. ¿Cómo varía la resultante de las fuerzas a lo largo del tiempo? g. Trazar la gráfica del módulo de la aceleración en función del tiempo. h. Trazar la gráfica de la distancia recorrida en función del tiempo.
6.2.6 MOV_H2.MDL ¿Cuál es la «historia» de este movimiento? (Observando la gráfica del módulo de la aceleración en función
del tiempo).
a. Ejecutar el modelo y observar con atención las cantidades y las gráficas. b. Describir este movimiento. c. ¿Cómo varía el módulo de la velocidad a lo largo del tiempo? d. ¿Cómo varía el módulo de la aceleración a lo largo del tiempo? e. ¿Cómo varía el sentido de la aceleración a lo largo del tiempo? f. Caracterizar el sentido y el módulo de la resultante de las fuerzas a lo largo del tiempo. g. Trazar la gráfica del módulo de la velocidad en función del tiempo. h. Trazar la gráfica de la distancia recorrida en función del tiempo.
6.2.7 MOV_H3.MDL ¿Cuál es la «historia» de este movimiento? (Observando la gráfica de la distancia recorrida en función del
tiempo).
a. Ejecutar el modelo y observar con atención las cantidades y las gráficas. b. Describir este movimiento. c. ¿Cómo varía el módulo de la velocidad a lo largo del tiempo? d. ¿Cómo varía el módulo de la aceleración a lo largo del tiempo? e. ¿Cómo varía el sentido de la aceleración a lo largo del tiempo? f. Caracterizar el sentido y el módulo de la resultante de las fuerzas al cambiar el tiempo. g. Trazar la gráfica del módulo de la velocidad en función del tiempo. h. Trazar la gráfica del módulo de la aceleración en función del tiempo.
17

18
6.2.8 LANCAM1.MDL Posición relativa de las direcciones de la fuerza y de la velocidad y de las direcciones de la aceleración y de
la velocidad en el movimiento de una bola de basket. ¿Qué relación hay entre la velocidad de una bola lanzada a la canasta de basket y la trayectoria? ¿Y entre la aceleración y la trayectoria?
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. ¿Qué tipo de trayectoria describe la bola? c. Describir la posición relativa entre la velocidad de la bola y la trayectoria. d. Describir la posición relativa entre la aceleración de la bola y la trayectoria. e. Caracterizar la dirección y el sentido de la fuerza gravitacional en la bola. f. ¿Qué pasaría a la bola si, en un determinado instante del movimiento, dejase de haber fuerza gravitacional?
6.2.9 MOVCIRC1.MDL Movimiento circular uniforme: el módulo de la velocidad es constante, pero la velocidad varía en
dirección. Es posible calcular el módulo de la velocidad, utilizando los datos de la pantalla.
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. Describir la trayectoria del movimiento. c. Describir la velocidad del movimiento. d. ¿Qué sentido («¿hacia adentro de la trayectoria?»; «¿hacia afuera?») tiene la aceleración de este movimiento? e. Si las cantidades estuvieran indicadas en unidades SI, ¿Cuál es la distancia recorrida al final de una vuelta? f. ¿Y al final de media vuelta? g. ¿Y al final de un cuarto de vuelta? h. ¿Cuál es el módulo de la velocidad? i. ¿Cómo se puede verificar que el módulo de la velocidad es constante?
6.2.10 PARAQ1.MDL Velocidad de un paracaidista en caída libre, antes de abrir el paracaídas.
a. Ejecutar el modelo y observar el movimiento, las cantidades y la gráfica. b. Describir la trayectoria del movimiento. c. Describir la velocidad del movimiento. d. ¿Qué significa afirmar que la velocidad terminal del paracaidista es 55 m/s? e. Caracterizar la resultante de las fuerzas cuando se alcanza la velocidad terminal. f. ¿Qué ocurre con la fuerza de resistencia del aire a lo largo de la caída? g. ¿Qué ocurre con la energía cinética del paracaidista a lo largo de la caída? h. Trazar la gráfica de la resultante de las fuerzas en función del tiempo. i. Trazar la gráfica de la aceleración en función del tiempo. j. Trazar la gráfica de la distancia recorrida en función del tiempo.
6.2.11 PLANO30.MDL Movimiento acelerado en un plano inclinado. Representación de la aceleración, de la velocidad, y de la
distancia recorrida.
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. Describir la velocidad del cuerpo. c. Describir la aceleración del cuerpo. d. Describir la distancia recorrida por el cuerpo. e. Trazar la gráfica de la distancia recorrida en función del tiempo. f. Trazar la gráfica de la velocidad en función del tiempo. g. Trazar la gráfica de la aceleración en función del tiempo.

h. Trazar la gráfica de la resultante de las fuerzas en función del tiempo.
6.2.12 PUXAR1.MDL ¿Qué relación hay entre fuerza y aceleración en un movimiento rectilíneo?
a. Ejecutar el modelo. Utilizar la barra azul para aumentar o disminuir la magnitud de la fuerza ejercida por la
mano sobre el carrito. b. ¿Qué ocurre con la velocidad del carrito cuando la fuerza es nula? c. ¿Qué ocurre con la aceleración del carrito cuando la fuerza es nula? d. ¿Qué relación hay entre el sentido de la fuerza y el sentido de la aceleración? e. ¿Qué expresión matemática describe la relación entre fuerza y aceleración? f. ¿Cómo se puede verificar que la masa del carrito es 0,5 kg, teniendo en cuenta los datos de la pantalla?
6.2.13 ATRITO1.MDL Fricción estática y fricción cinética en un plano horizontal.
a. Ejecutar el modelo y observar las cantidades. b. Describir verbalmente la situación presentada. c. ¿Cuál es la magnitud o módulo de la fuerza normal? d. ¿Cuál es la magnitud máxima de la fuerza de fricción estática? e. Calcular el coeficiente de fricción estática entre el bloque y la mesa. f. ¿Cuál es la magnitud de la fuerza de fricción, después de que el bloque inicia el movimiento? g. Calcular el coeficiente de fricción cinética entre el bloque y la mesa.
6.3 Energía y trabajo
6.3.1 QUEDA_W1.MDL Cálculo del trabajo de la fuerza gravitacional en la caída de una bola.
a. Ejecutar el modelo y observar con atención el movimiento de la bola y las cantidades representadas. b. ¿Cómo varía la velocidad de la bola a lo largo de la caída? c. ¿Desde qué altura fue la caída? d. ¿Cuál es el peso de la bola, en newtons? e. ¿Cuál es la masa de la bola, en kilogramos? f. ¿Cuál es el trabajo de la fuerza gravitacional, durante la caída? ¿Cómo se calcula?
6.3.2 TRAB_G1.MDL Cálculo del trabajo de una fuerza por el método gráfico (fuerza de magnitud constante).
a. Ejecutar el modelo y observar el movimiento, las cantidades y la gráfica. b. ¿Qué tipo de movimiento tiene el carrito? ¿Por qué? c. ¿Cuál es el módulo del desplazamiento al final de 6 s? d. ¿Cuál es el trabajo de la fuerza al final de 6 s? e. ¿Qué relación hay entre el trabajo de la fuerza y el área marcada en amarillo en la gráfica F(s)?
19

20
6.3.3 TRAB_G2.MDL Cálculo del trabajo de una fuerza por el método gráfico (fuerza de magnitud creciente, de acuerdo con la ley
de Hooke).
a. Ejecutar el modelo y observar el movimiento, las cantidades y la gráfica. Se acepta que se empuja el carrito sin movimientos bruscos.
b. ¿Es constante o variable la magnitud de la fuerza ejercida por el resorte sobre el carrito a medida que se empuja el carrito? ¿y la fuerza ejercida por la mano?
c. ¿Por qué motivo no se puede aplicar la ecuación W = F s cos θ para calcular el trabajo de la fuerza ejercida por la mano (o por el resorte)?
d. ¿Cuál es el módulo del desplazamiento al final de 0,95 s? e. ¿Qué relación hay entre el trabajo de la fuerza ejercida por la mano y el área marcada en amarillo en la gráfica
F(s)? f. ¿Cuál es el trabajo de la fuerza al final de 0,95 s?
6.3.4 TRAB_Q1.MDL Trabajo de la fuerza gravitacional en una caída libre.
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. ¿Qué tipo de movimiento tiene el cuerpo? ¿Por qué? c. ¿Cuál es la magnitud de la fuerza gravitacional? d. ¿Cuál es el módulo del desplazamiento al final de 1 s? e. ¿Cuál es el trabajo de la fuerza gravitacional al final de 1 s? f. Esquematizar una gráfica que relacione la magnitud de la fuerza gravitacional con la distancia recorrida y
marcar el área que corresponde al trabajo de la fuerza.
6.3.5 TRAB_S1.MDL Trabajo de la fuerza gravitacional en el Lanzamiento de una bola (subida).
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. ¿Qué relación hay entre el sentido de la fuerza y el sentido de la velocidad en este movimiento? c. ¿Cuál es la magnitud de la fuerza gravitacional? d. ¿Cuál es el módulo del desplazamiento al final de 2 s? e. ¿Cuál es el trabajo de la fuerza gravitacional al final de 2 s? f. ¿Qué trabajo realizaría la fuerza gravitacional durante la caída? g. ¿Cuál seria el trabajo total de la fuerza gravitacional en el recorrido de subida y bajada?
6.3.6 TRAB1.MDL Cálculo del trabajo de una fuerza constante.
a. Ejecutar el modelo. Observar atentamente a situación representada. b. ¿Qué características tiene la fuerza aplicada: dirección, sentido, módulo (o magnitud)? c. ¿Cuál es a distancia recorrida por el carrito en los 6,0 s? d. ¿El carrito aceleró o mantuvo constante la velocidad? Justificar. e. Controlando la barra del tiempo (ventana Control), indicar el trabajo realizado por la fuerza en los primeros
3,0 s f. ¿Cuál fue el trabajo realizado por la fuerza en los primeros 6,0 s? g. ¿Qué ocurre con la energía cinética del carro?

6.3.7 PUXAR2.MDL Trabajo de una fuerza y variación de energía cinética.
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. ¿Cuál es el módulo del desplazamiento del carrito al final de 10 s? c. ¿Cuál es el módulo de la fuerza aplicada al carrito? d. Calcular el trabajo de la fuerza aplicada al carrito. e. ¿Qué relación hay entre la variación de energía cinética y el trabajo de la fuerza aplicada en el carrito? f. ¿Por qué podemos considerar que la fuerza aplicada en el carrito es igual a la resultante de las fuerzas aplicadas
al carrito? g. Calcular la velocidad que el carrito alcanzó al final de 10 s.
6.3.8 BASK1.MDL Transformaciones de energía en el lanzamiento vertical de una bola.
a. Ejecutar el modelo. Observar el movimiento y las gráficas. b. ¿Qué ocurre al módulo (magnitud) de la velocidad de la bola en cuanto sube? c. ¿Qué ocurre al módulo (magnitud) de la velocidad de la bola en cuanto desciende? d. ¿Qué ocurre con la energía cinética de la bola en cuanto sube? e. ¿Qué ocurre con la energía cinética de la bola en cuanto desciende? f. ¿En que condiciones se considera que la energía potencial del sistema bola-Tierra es nula? g. ¿Qué ocurre con la energía potencial en cuanto la bola sube? h. ¿Qué ocurre con la energía potencial en cuanto la bola desciende? i. ¿Cómo se comporta la energía mecánica? Por qué?
6.3.9-a QUEDA_E1.MDL Transformación de energía potencial en energía cinética en la caída de una bola.
a. Ejecutar el modelo y observar el movimiento, las cantidades y las gráficas. b. ¿De qué altura cae la bola? c. ¿Considera fuerzas de resistencia este modelo? d. ¿Qué ecuación permite calcular el módulo de la velocidad al final de t segundos? Explicar cómo surge esa
expresión, teniendo en cuenta que la aceleración de la gravedad, g, mide la rapidez de la variación de la velocidad con el tiempo.
e. Calcular la velocidad de la bola en los instantes t = 0 s, t = 1 s, t = 2 s y t = 3 s. f. ¿Qué ecuación permite calcular la altura de la bola en cada instante? Utilizar esa ecuación para calcular la
altura de la bola en los instantes t = 0 s, t = 1 s, t = 2 s y t = 3 s. g. ¿Qué ecuación permite calcular la energía cinética de la bola en cada instante? Utilizar esa ecuación para
calcular la energía cinética de la bola en los instantes t = 0 s, t = 1 s, t = 2 s y t = 3 s. h. ¿Qué ecuación permite calcular la energía potencial de la bola en cada instante? Utilizar esa ecuación para
calcular la energía potencial de la bola en los instantes t = 0 s, t = 1 s, t = 2 s y t = 3 s. i. Deducir una ecuación que permita calcular la energía mecánica de la bola en cada instante. Utilizar esa
ecuación para calcular la energía mecánica en los instantes t = 0 s, t = 1 s, t = 2 s y t = 3 s.
21

22
6.3.9-b QUEDA_E1.MDL Transformación de energía potencial en energía cinética en la caída de una bola sujeta sólo a la fuerza
gravitacional. Representación gráfica de la energía en función del tiempo.
a. Ejecutar el modelo. Observar atentamente la caída y las gráficas de la energía cinética de la bola en función del tiempo y de la energía potencial en función del tiempo.
b. ¿Qué ocurre con la velocidad de la bola? ¿Qué evidencia hay en la figura que justifique la respuesta? c. ¿Qué valor tenía la energía cinética de la bola al inicio de la caída? d. ¿Qué valor tenía la energía cinética de la bola al final de la caída? e. ¿Cómo varía la energía cinética durante la caída? f. ¿Qué valor tenía la energía potencial de la bola al inicio de la caída? g. ¿Qué valor tenía la energía potencial de la bola al final de la caída? h. ¿Cómo varía la energía potencial durante la caída? i. ¿Qué relación hay entre una variación de la energía cinética y la correspondiente variación de la energía
potencial? j. ¿Cuál es el valor de la energía mecánica (= energía cinética + energía potencial) de la bola al inicio de la caída? k. ¿Cuál es el valor de la energía mecánica (= energía cinética + energía potencial) de la bola al final de la caída?
6.3.10 MOLA_EN1.MDL La energía potencial almacenada en el sistema resorte+carrito se transfiere al carrito.
a. ¿Qué tipo de energía posee el sistema resorte-carrito cuando el resorte está comprimido? b. ¿Cómo varía la fuerza aplicada al carrito, cuando el resorte está estirado? c. ¿Cuál es la resultante de las fuerzas en el carrito después de salir del contacto con el resorte? d. ¿Cómo varía la velocidad del carrito, en cuanto éste está en contacto con el resorte? e. ¿Cómo varía la energía cinética del carrito, en cuanto éste está en contacto con el resorte? f. ¿Cómo varía la energía cinética del carrito después de salir éste del contacto con el resorte? g. ¿En qué condiciones la respuesta a la pregunta anterior es válida? h. Trazar una gráfica de la energía cinética del carrito en función del tiempo. i. Trazar una gráfica de la energía potencial del sistema carrito-resorte en función del tiempo.
6.3.11 PLANO30.MDL ¿Cuál es el trabajo de la fuerza gravitacional que actúa sobre un cuerpo que desciende un plano inclinado
con fricción despreciable y ángulo de inclinación 30°?
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. ¿Cuál es el módulo del desplazamiento al final de 0,89 s? c. ¿Hay fricción entre el cuerpo y el plano? d. De las dos fuerzas que actúan en el cuerpo, ¿Cuál es la que no realiza trabajo? ¿Por qué? e. ¿Cuál es la magnitud de la fuerza gravitacional? y ¿Cuál es la masa del cuerpo? f. Calcular el trabajo de la fuerza gravitacional. g. Determinar la dirección y el sentido de la resultante de las fuerzas. h. Calcular el módulo de la resultante de las fuerzas. i. Calcular el trabajo de la resultante de las fuerzas. j. Calcular el desnivel entre el punto de partida y el plano horizontal en que el cuerpo se encuentra al final de 0,89
s. k. ¿Cuál es la variación de energía potencial del sistema cuerpo-Tierra? l. Y ¿cuál es la variación de la energía cinética del cuerpo?

6.3.12 PLANO45.MDL Disipación de energía en el movimiento con fricción a lo largo de un plano inclinado.
a. Ejecutar el modelo y observar el movimiento y las cantidades. b. Hay fricción entre el cuerpo y el plano? Esa fricción es mayor o menor que la resultante de la fuerza normal
con la fuerza gravitacional? ¿Por qué? c. De las tres fuerzas que actúan sobre el cuerpo, ¿Cuál es la que no realiza trabajo? Por qué? d. Determinar la dirección y el sentido de la resultante de las fuerzas. e. Teniendo en cuenta los de lados de la tela, determinar la variación de la energía potencial del sistema cuerpo-
Tierra. f. Teniendo en cuenta los de lados de la tela, determinar la variación de la energía cinética del cuerpo. g. ¿Cuál fue la variación de energía mecánica? h. ¿Cuánto vale la energía disipada? i. ¿Cómo se manifiesta la energía disipada?
6.3.13 PARAQ1.MDL Energía mecánica y energía disipada en el movimiento de un paracaidista.
a. Ejecutar el modelo y observar el movimiento, las cantidades y las gráficas. b. ¿Qué ocurre con la velocidad del paracaidista à medida que transcurre el movimiento? Por qué? c. ¿Cuál es el valor de la velocidad terminal, antes de abrir el paracaídas? ¿Al final de cuánto tiempo se alcanza? d. ¿Cómo varía la energía cinética del paracaidista? e. E la energía potencial del sistema paracaidista-Tierra? f. A medida que transcurre el movimiento, aumenta la energía disipada. ¿Por qué? g. ¿Qué relación hay entre la energía mecánica y la energía disipada?
6.4 Energía y calor
6.4.1 ISOBAR1.MDL Cuatro isóbaras.
a. Ejecutar el modelo y observar las gráficas. b. ¿Qué significa «isóbara»? c. ¿Cuál es la variable dependiente? d. Los diferentes colores en la gráfica corresponden a diferentes valores ¿de qué variable? e. ¿Entre qué valores varía la variable independiente, T, temperatura (en kelvin)? f. ¿Qué tipo de relación matemática hay entre V y T? g. Extrapolando las gráficas para valores de T = 0, que valor tendría V?
6.4.2 ISOTERM1.MDL Cuatro isotermas.
a. Ejecutar el modelo y observar las gráficas. b. ¿Qué significa «isoterma»? c. ¿Cuál es la variable dependiente? d. Los diferentes colores en la gráfica corresponden a diferentes valores ¿de qué variable? e. ¿Entre que valores varía a variable independiente, V, volumen? f. ¿Qué tipo de relación matemática hay entre P y V? g. Extrapolando las gráficas para valores de V = 0, ¿qué valor tendría P? h. Extrapolando las gráficas para valores de V = ∞, ¿qué valor tendría P?
23

24
6.4.3 ISOVOL1.MDL Cuatro isovolumétricas o isócoras.
a. Ejecutar el modelo y observar las gráficas. b. ¿Qué significa «isovolumétrica»? c. ¿Cuál es la variable dependiente? d. Los diferentes colores en la gráfica corresponden a diferentes valores ¿de qué variable? e. ¿Entre qué valores varía la variable independiente, T, temperatura (en kelvin)? f. ¿Qué tipo de relación matemática hay entre P y T? g. Extrapolando las gráficas para valores de T = 0, que valor tendría P?
6.4.4 SOLIDO.MDL Modelo de la agitación de las partículas de un sólido.
a. Ejecutar el modelo y observar con atención. b. Aumentar la barra que controla la temperatura. c. ¿Qué relación hay entre la temperatura y la agitación de las partículas? d. Escribir una lista de las características de los sólidos, a nivel microscópico. e. ¿Qué le ocurre a las partículas de un sólido cuando el sólido se funde?
6.5 Energía y corriente eléctrica
6.5.1 CORRENT.MDL Simulación de la velocidad de arrastre o deriva de los electrones en un conductor metálico.
a. Ejecutar el modelo y observar a simulación. b. Los colores de los «electrones» no tienen ningún significado. Sirven sólo para facilitar la interpretación del
modelo. c. ¿Qué significa afirmar que «el movimiento de los electrones es muy rápido, pero su avance es lento»? d. En un conductor metálico no recorrido por una corriente, ¿no hay movimiento de electrones? ¿Y avance de los
electrones? e. ¿Este modelo describe la totalidad de las características microscópicas de los conductores metálicos?
Fundamentar la respuesta.
6.5.2 OHM1.MDL Un ejemplo de aplicación de la ley de Ohm.
a. La ley de Ohm expresa una proporcionalidad, válida para cierto tipo de conductores. Explicar el significado de
esta afirmación. b. Ejecutar el modelo. Utilizar la barra roja para aumentar o disminuir la intensidad de la corriente. c. Construir una tabla de valores de I y de V, la diferencia.de.potencial. en los extremos del conductor. d. Calcular el valor de la resistencia R del conductor. e. ¿Depende en este modelo la resistencia R del conductor de la intensidad de la corriente utilizada? Fundamentar
la respuesta. f. La respuesta a la pregunta anterior, ¿es válida para todo tipo de conductores? ¿Cómo se llaman los conductores
en los que no es válida?

6.5.3 ASS_PAR.MDL Cálculo de la resistencia equivalente de la combinación de dos resistores en paralelo.
a. A partir de la ecuación =eqR1
1
1R
+2
1R
deducir la ecuación utilizada en este modelo.
b. Ejecutar el modelo y modificar el valor de R1 o de R2 . Observar cómo varía el valor de la resistencia equivalente de la combinación.
c. Para el intervalo de valores que pueden tomar R1 y R2, ¿Cuál es el valor máximo de la resistencia equivalente? d. Para el intervalo de valores que pueden tomar R1 y R2 , ¿Cuál es el valor mínimo de la resistencia equivalente?
6.5.4 ASS_SER.MDL Cálculo de la resistencia equivalente de la combinación de dos resistores en serie.
a. Ejecutar el modelo y modificar el valor de R1 o R2 . Observar cómo varía el valor de la resistencia equivalente
de la combinación. b. Para el intervalo de valores que pueden tomar R1 y R2, ¿Cuál es el valor máximo de la resistencia equivalente? c. Para el intervalo de valores que pueden tomar R1 y R2, ¿Cuál es el valor mínimo de la resistencia equivalente?
6.5.5 JOULE_R.MDL Ley de Joule: relación entre la energía disipada en un resistor y la resistencia del conductor, manteniendo
constantes la intensidad de la corriente y el intervalo de tiempo.
a. Ejecutar el modelo y observar la gráfica. b. ¿Cuál es la variable dependiente? c. ¿Cuál es la variable independiente? d. ¿Entre qué valores varía la variable independiente? e. ¿Qué tipo de relación matemática hay entre i y R?
6.5.6 JOULE_I.MDL Ley de Joule: relación entre la energía disipada en un resistor y la intensidad de la corriente, manteniendo
constantes la resistencia y el intervalo de tiempo.
a. Ejecutar el modelo y observar la gráfica. b. ¿Cuál es la variable dependiente? c. ¿Cuál es la variable independiente? d. ¿Entre qué valores varía la variable independiente? e. ¿Qué tipo de relación matemática hay entre i y R?
6.5.7 JOULE_T.MDL Ley de Joule: relación entre la energía disipada en un resistor y el intervalo de tiempo, manteniendo
constantes a resistencia y la intensidad de la corriente.
a. Ejecutar el modelo y observar la gráfica. b. ¿Cuál es la variable dependiente? c. ¿Cuál es la variable independiente? d. ¿Entre qué valores varía la variable independiente? e. ¿Qué tipo de relación matemática hay entre y y R?
25

26
6.5.8 CIRC_EN2.MDL Conservación de energía en un circuito formado por un generador y un resistor.
a. Ejecutar el modelo y observar los valores de la cantidades. b. ¿Cuál es la intensidad de la corriente en el circuito? c. ¿Qué transferencias de energía ocurren en este circuito? d. ¿Qué relación matemática hay entre la energía proporcionada al circuito por el generador, la energía disipada
en el generador y la energía disipada en el resistor? e. El rendimiento del generador nos indica a fracción de la energía que es transferida hacia afuera del generador.
Explicar el significado de esta afirmación, con un ejemplo de valores. f. ¿Qué ecuación matemática permite calcular la energía disipada en el resistor al final de t s? g. Calcular la potencia del generador. h. Calcular la potencia del resistor.
6.5.9 CIRC_EN1.MDL Conservación de energía en un circuito eléctrico con un generador y un motor.
a. Ejecutar el modelo y observar los valores de las cantidades. b. ¿Cuál es la intensidad de la corriente en el circuito? c. ¿Qué transferencias de energía ocurren en este circuito? d. ¿Qué relación matemática hay entre la energía proporcionada al circuito por el generador, la energía disipada
en el generador, la energía obtenida del motor para el exterior y la energía disipada en el motor? e. El rendimiento del generador nos indica la fracción de la energía que es transferida hacia afuera del generador.
Explicar el significado de esta afirmación, con un ejemplo de valores. f. El rendimiento del motor nos indica la fracción de la energía que es transferida hacia afuera del motor. Explicar
el significado de esta afirmación, con un ejemplo de valores. g. Calcular la potencia del generador. h. Calcular la potencia del motor.
6.6 Radiación y ambiente
6.6.1 RADIO0.MDL Representación gráfica de una transformación radioactiva.
a. Ejecutar el modelo y observar las cantidades y la gráfica. b. Describir la actividad radioactiva al transcurrir el tiempo. c. ¿Cuánto tiempo se tarda para que ocurra la desintegración de los primeros 500 átomos? d. Después de que se desintegraron 500 átomos, ¿Cuánto tiempo tarda la desintegración de otros 250 átomos? e. Después de que se desintegraron 750 átomos, ¿Cuánto tiempo tarda la desintegración de otros 125 átomos? f. ¿Cuál es la vida media del kriptón 89Kr? g. ¿Qué significa ese valor?
6.6.2 RADIO1.MDL Comparación de una transformación radioactiva lenta con una transformación rápida. Análisis del
significado de la vida media, T1/2.
a. Ejecutar el modelo y observar las cantidades y la gráfica. b. Comparar la actividad radioactiva del radón 222Rn con el criptón 89Kr. c. ¿Cuánto tiempo se tarda para que ocurra la desintegración de los primeros 500 átomos de 222Rn? d. ¿Cuánto tiempo se tarda para que ocurra la desintegración de los primeros 500 átomos de 89Kr? e. ¿Cuál es la vida media del 222Rn? f. ¿Qué significa ese valor?

7. ANEXO
Además de los ejemplos incluidos en el material de Duarte, Duque y Costa adaptado por Ribeiro y Veit, originalmente para la versión de Modellus 1.10, se cuenta con ejemplos adicionales propuestos por otras personas, disponibles en la página web de Modellus,. Aquí damos descripciones simples de ejemplos con mucho interés didáctico desarrollados por a) Estoril, b) Rolland y c) Veit y Moors, contenidos en las carpetas Estoril, Rolland y Veit respectivamente, que también deben ubicarse en la carpeta Modellus. A continuación, el contenido de cada una.
Directorio Estoril colheita.mdl Aspectos económicos de las cosechas fcos1.mdl El coseno de un ángulo fseno1.mdl El seno de un ángulo ft10.mdl Posición y velocidad de un cuerpo lanzado hacia arriba ftg1.mdl La tangente de un ángulo m-moedas.mdl Máquinas de monedas nodoa.mdl Radio y área de una mancha de tinta, velocidad y aceleración con las que cambia el
radio pendulo1.mdl Sin terminar pendulo2.mdl Movimiento similar a un péndulo radiano.mdl ¿Qué es un radián?
Directorio Rolland affine.mdl Parámetros de una recta cossin.mdl El seno y el coseno de ángulos expresados en grados deplace.mdl Medición de la longitud y el ángulo de un vector desplazamiento deptotal.mdl Desplazamientos sucesivos y total fermat.mdl El principio de Fermat aplicado a la reflexión mculab.mdl Movimiento circular uniforme mcuvvite.mdl Movimiento circular uniforme con ruptura de la cuerda que sostiene a la partícula mcvarie1.mdl Movimiento circular con rapidez no uniforme mcvarie2.mdl Como el anterior, mostrando además la fuerza centrípeta mru_exer.mdl Movimiento rectilineo uniforme mru_test.mdl Examen sobre movimiento rectilíneo uniforme mruasynt.mdl Movimiento rectilíneo uniforme con aceleraciones mruvarie.mdl Movimientos rectilíneos uniformes sucesivos newtonaf.mdl Relación entre masa inercial, fuerza y aceleración newtonam.mdl Idem pente.mdl Concepto de triángulos semejantes y de pendiente de un plano inclinado pincl_x0.mdl Desplazamiento, velocidad y aceleración en un plano inclinado plan_inc.mdl Distancia recorrida en un plano inclinado diferentes ángulos bajo la acción de la
gravedad pouter.mdl Dar la fuerza sobre dos pilares que sostienen una viga sobre la que actúa una fuerza prisme.mdl Ángulo de desviación de un rayo por un prisma de ángulo e índice de refracción
arbitrarios snell.mdl Medir distancias para obtener la ley de Snell del experimento traj&dep.mdl Desplazamiento total y distancia recorrida sobre una trayectoria trigo.mdl Explicación de las funciones trigonométricas
27

28
Carpeta Veit atrito.mdl Fricción estática y cinética cf_atr_c.mdl Experimento para determinar el coeficiente de fricción cinética con un plano inclinado cf_atr_e.mdl Experimento para determinar el coeficiente de fricción estática al iniciarse el
movimiento sobre un plano inclinado cons_en.mdl Conservación de energía en resortes corrida.mdl Comparación del movimiento de dos vehículos diss_atr.mdl Energía disipada por el trabajo realizado por la fuerza de fricción cinética en_mec.mdl Energía mecánica en la caída libre vertical f_a.mdl Relación entre fuerza aplicada y aceleración (ignorando fricción) f_a_v.mdl Observación de relación entre fuerza, aceleración y velocidad f_a_v_bi.mdl Idem. f_m_a.mdl Comparación de aceleración de bloques de diferente masa sobre los que actúa la
misma fuerza f_mola.mdl Relación fuerza – desplazamiento de un resorte freq.mdl Identificación de la frecuencia y ejemplos de efecto estroboscópico fres_pot.mdl Representación geométrica de la derivada de la energía potencial respecto a la
posición harm_xva.mdl Posición, velocidad y aceleración en el sistema resorte - masa harmonic.mdl Superposición de movimientos armónicos perpendiculares (figuras de Lissajous) mc_ver.mdl Fuerzas, aceleraciones y velocidad en el movimiento circular en un plano vertical mola_en.mdl Cambios de energía en el sistema resorte-masa mov_rel.mdl Observación del movimiento desde diferentes sistemas de referencia inerciales péndulo.mdl Fuerzas, aceleraciones y velocidad en el movimiento del péndulo peso_ap.mdl El peso aparente en un elevador acelerado pl_incl.mdl Fuerzas sobre un cuerpo en un plano inclinado (sin fricción) polia1.mdl Frecuencia de rotación de dos poleas polia2.mdl Periodo de rotación de tres poleas polia3.mdl Frecuencia de rotación de dos poleas con transmisión de banda polia4.mdl Velocidad tangencial en poleas con transmisión de banda prj_incl.mdl Una bola se lanza desde un carrito sobre un plano inclinado diferentes ángulos proj1.mdl Movimientos vertical y horizontal de proyectil proj2.mdl Caída de un objeto soltado desde un helicóptero en movimiento proj3.mdl Igualdad del movimiento vertical de proyectiles proj4.mdl El problema del cazador y el mono rad1.mdl Ejemplo del radián rad2.mdl Relación entre ángulo en radianes y circunferencia vet_desl.mdl Vector posición y vector desplazamiento en movimiento rectilíneo, circular y de un
proyectil vet_vel.mdl Vector posición y vector velocidad en movimiento rectilíneo, circular y de un proyectil w_area.mdl Estimar el trabajo como el área bajo la curva fuerza - distancia w_ec.mdl Trabajo y energía cinética w_t.mdl Trabajo efectuado por la tensión en diferentes intervalos del movimiento circular
uniforme en un plano horizontal
![Tema 0-Introducciona [Modo de compatibilidad]fundacionindex.com/gomeres/wp-content/uploads/2014/09/... · 2014. 10. 7. · A = nº de aciertos E = nº de errores n = nº de ... Normas](https://img.pdfslide.net/doc/110x75/613b4360f8f21c0c8268e6e1/tema-0-introducciona-modo-de-compatibilidad-2014-10-7-a-n-de-aciertos.jpg)
![Tema 0-Introducciona [Modo de compatibilidad] · 2014-10-07 · evolución del cuidado de enfermería. 2.12: Comprender desde una perspectiva ontológica y epistemológica , la evolución](https://img.pdfslide.net/doc/110x75/5e2b56196cddb87ce72932a1/tema-0-introducciona-modo-de-compatibilidad-2014-10-07-evolucin-del-cuidado.jpg)
















