Embed Size (px)
Citation preview

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Emergence of Gait in Legged Systems
André SeyfarthAndré Seyfarth
ISB conference Cleveland, 2005ISB conference Cleveland, 2005

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Emergence of Gait in Legged Systems
André SeyfarthLocomotion Laboratory
Friedrich-Schiller University, Jena

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Arrival at Cleveland
Jürgen
Suzi Hartmut

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Models
• Springs• Joints• Segments• Muscles
Robots
• Springs• Screws• Metal parts• Servos • Rubber
simple, fast, easy to understand

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Central questionsWhat are the common design and
control principles of legged locomotion?
Internal Leg
Function
Global Leg Function

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Central questionsWhat are the common design and
control principles of legged locomotion?
MECHANICS STABILITY CONTROL
What are the movement primitives of legged locomotion?
ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Outline
• Jumping for distance• Stable operation of a segmented leg• Generation of muscle activity• Stable running with elastic legs• From running to walking• Exploration of simple legged robots• Conclusions
1
2
3
4
5
6
7

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
1Jumping for distance

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Seyfarth et al. (1999) J. Biomech.
Dynamics of the long jump
k
m1
m2
Nonlinear spring-damper element
time (ms)
Gro
und
reac
tion
for
ce (
N)
Energetic losses may
increase performance!

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Seyfarth et al. (1999) J. Biomech.
Dynamics of the long jump
k
m1
m2
Nonlinear spring-damper element
Is this model able to predict jumping distance?
Is this model able to predict maximum jumping distance?

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Muscle operation in long jump
eccentric operation
Tendon compliance (SE) shifts eccentric muscle operation (CE) into midstance
Seyfarth et al. (2000) J. Exp. Biol.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take home message(long jump)
• The dynamics of long jump can well be described by a simple two-mass model
• Energetic losses due to impacts and eccentric muscle operation can improve jumping distance
• Tendon compliance shifts eccentric muscle operation into midstance

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
2 Stable operation of a
segmented leg

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Control of a segmented leg
Idea
Global Leg Function
Local Leg Function

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Control of a segmented leg
Idea

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Control of a segmented leg
Idea

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Control of a segmented leg
1
2
3
3b3a

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Control of a segmented leg
Solutions
Seyfarth et al. (2001) Biol. Cybern.
• Biarticular Structures (e.g. Muscles)
• Geometric Constraints (e.g. Heel pad)
+

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take home message(internal leg stability)
• With three or more leg segments, internal stability becomes important
• At certain leg length, symmetric joint flexion becomes unstable
• Different safety strategies do exist to resolve the intrinsic stability problem

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
3 Generation of muscle activity

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Geyer et al. (2003) Proc.Roy.Soc.B.
Generation of muscle activity
Positive Force
Feedback

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Generation of muscle activity

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take home message(positive force feedback)
• In hopping or running tasks, the generation of extensor muscle activity could be facilitated by positive force feedback
• This control regime imitates spring-like leg behavior and is robust with respect to environmental changes

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
4 Stable Running with
elastic legs

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Spring Mass Running
fixed angle of attack
fixed leg stiffness
Seyfarth et al. (2002) J. Biomechanics
PERIODICITY
SYMMETRY
ELASTICITY

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Spring Mass Running
RETRACTION
Seyfarth et al. (2003) J. Exp. Biol.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Spring Mass Running
Seyfarth & Geyer (2002) CLAWAR Meeting, Paris.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take home message(spring mass running)
• For a given leg stiffness and angle of attack, self-stable running can be found.
• The stability of running is largely increased, if leg retraction is applied.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
5 From Running
to Walking

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Spring Mass Walking
Geyer et al. (2005) ISB Conference

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
RUNNING
Spring Mass Running &Walking
stiffness k stiffness 0
stiffness k stiffness 0
WALKING
stiffness k stiffness 2k
stiffness k stiffness 2k
mass m mass m/2 mass m mass m/2
YCOM
FY
YCOM
FY SS DS
POSTER #197

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Spring Mass Walking
Stable solutions
E
k 0

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
A B C
Ground Reaction Forces
Spring Mass Walking
E=const.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALWalking andRunning withElastic Legs
Running
Walking
stiffness k
Speed vX
angle of attack 0
GAP

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take home message(spring mass walking)
• In bipedal spring-mass model, self-stable walking can be found.
• The model predicts the experimentally observed force pattern.
• Running and walking are behaviors of one and the same system.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
6 Exploration of simple
legged robots

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Our Approach
• Experiments• Theory• Simulations• Robotics

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Experiments

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Robotics

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Hip Control

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Experimental Robotics
CPG

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Comparison with Biology
robot human

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Human Walking & Running
walking
running

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take-home message(hip control)
• Sinusoidal hip oscillations applied to an elastic leg may result in stable hopping patterns
• Elastic joints are important to master impacts and to keep control simple.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Movement Direction
?
ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
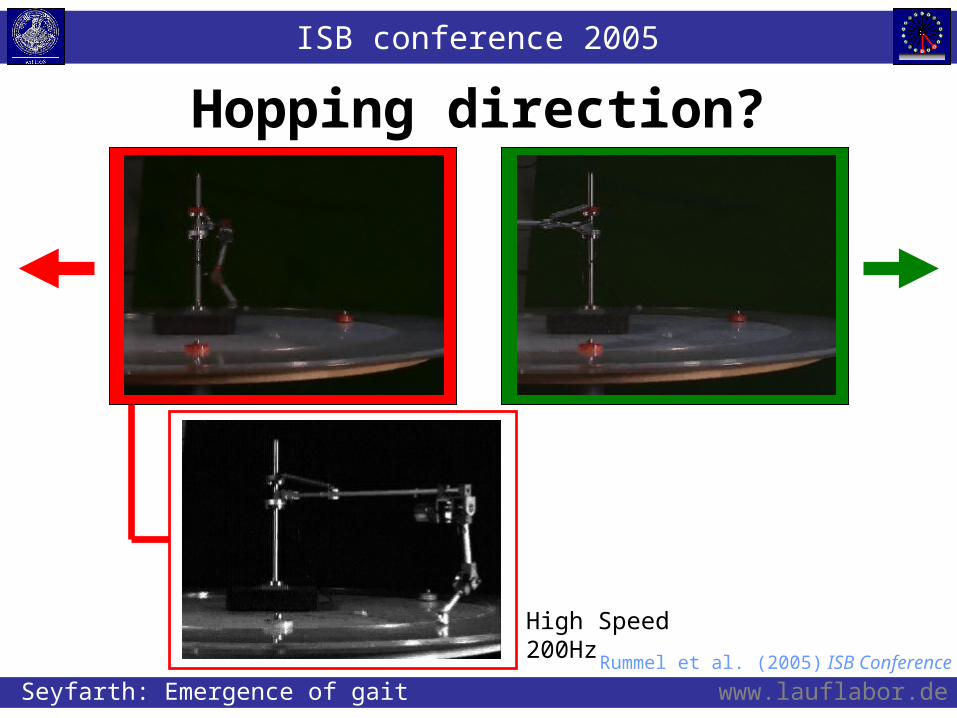
Hopping direction?
High Speed200Hz
Rummel et al. (2005) ISB Conference

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
?
FrequencyBias Angle

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
-0.2
0
0 0
00
0.1
0.1
0.1
0.1
0.1
0.1
0.3
0.3
0.3
0.3
0.3
0.3
0
oscillation frequency [Hz]
bias
ang
le [
deg]
horizontal velocity [m/s]
2 4 6 8
-20
-10
0
10
20
-0.6
-0.4
-0.2
0
0.2
Hopping direction?
v
CPG

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Influence of Hip Retraction
v CPG
M = c (0 – )FLEG

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take-home message(movement direction)
Leg segmentation and motor frequency defines preferred locomotion direction.
Leg compliance supported by the hip action
Leg stiffness supported by the hip action
ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Leg Segmentation & Gait
ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Leg Segmentation and Gait
Is walking just running with double support phases?

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Leg Segmentation and GaitWALK RUN

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Leg Segmentation and Gait
GASGAS

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Leg Segmentation and Gait
(corresponds to GAS length)

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Passive Walking?
1
2
Cornell ankle-powered biped walking on a level surface
1
2
straight leg during stance
curved foot
Collins et al. Science 18 Feb 2005; 307: 1082-1085

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Compliant Walking

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Compliant Walking
HUMAN ROBOT
Iida (2005) AMAM Conference

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Running & Walking
LEG FUNCTION
RUNNING
WALKING
KNEE AND ANKLE JOINT
↑ ↑ ↑ ↓
ELASTIC ENERGY HIGH LOWLEG COMPRESSION FAST SLOW
LEG ROTATION FAST SLOWBI-ARTICULAR
MUSCLESLOW FAST
KNEE JOINT @ STANCE
↓ + ↑ ↓ + ↑ + ↓

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Take-home message(leg segmentation and gait)
Walking and running can be observed in passive elastic legs with harmonic oscillations at the hip.
In the three-segmented leg, ankle and knee joint symmetry is switched between running and walking.

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Conclusions• Simple models and robots
can help to better understand legged locomotion
• Selfstability is an effective tool to identify movement patterns with cheap control
• Walking and running can be described as two behaviors of the same mechanical system

ISB conference 2005
Seyfarth: Emergence of gait www.lauflabor.de
F
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
ALF
U
A
L
U
N
I J E
N
A
R
O
B
AL
Thank you!Locomotion Lab JenaHartmut Geyer · Heidi KnüselFumiya Iida · Susanne LipfertJürgen Rummel · Jan MichelElmar DittrichResearch PartnersProf. Reinhard Blickhan · Motion Science, Jena Prof. Volker Dietz · ParaLab, ZurichProf. Hugh Herr · Biomechatronics Lab, MITProf. Karl Th. Kalveram· University Düsseldorf
Supported by German Research Foundation (DFG grant SE1042) Jena