Embed Size (px)
Citation preview
IUT CACHAN - GMP 2 Cours de Mécanique Mr Barreau Octobre 2002
DYNAMIQUEPrincipe fondamental de la dynamique du solide.
*Définition :Dans un repère Galiléen, le torseur des actions mécaniques appliquées à un solideest égale au torseur dynamique de ce solide dans son mouvement par rapport à R0.
[ ] [ ]
AAASextA
Sfext
ARSASext
RS
RSRdF
R
AF
m
=
=
)0/(
)0/(
)( /
/
)0/(/
δ
r
*Repères Galiléen approchés :-Repère de Copernic: Origine au centre d'inertie du système solaire + trois directionsstellaire "fixes".Tout repère en translation par rapport au repère de Copernic peut être considérécomme Galiléen.-Repère lié au centre d'inertie de la terre : Origine au centre d'inertie de la terre + lesdirections stellaires précédentes (repère en translation non rectiligne et non uniformepar rapport au précédent)-Le repère terrestre : Origine locale du repère de travail. utilisation: convient engénéral au phénomènes mécaniques classiques. Il peut être considéré commegaliléen sur une période d’observation relativement courte.
Théorèmes Généraux.
*Théorème de la résultante dynamique :
)0/;(
)0/;(
.
.
1/
/
RSGFi
RSG
m
mRn
iSext
Sfext
Γ=
Γ=
∑=
r
r
Un solide de masse m soumis à une somme de forces de résultante SextR / subit
une accélération égale au quotient de SextR / par la masse du solide.
Un solide de masse m en accélération )0/;( RSGΓr
induit des forces égales auproduit de la masse par l’accélération.
*Théorème du Moment dynamique.
)0/(
)0/(
1/
/
)(
)(
RSFim
RS
A
n
iSextA
ASextA Fmδ
δ
=∑=
=
La somme des moments au point A des forces extérieures appliqués au solide S estégale au moment dynamique en A du solide dans son mouvement par rapport à R0
*Théorème de la résultante cinétique :
[ ])(. 0/;/ RSGVmdtd
R Sfext
r=
Remarque : si 0/
r=SextR alors [ ] 0)(. 0/;
rr=RSGVm
dtd
et donc
)(. 0/; RSGVmr
= constante. Il y a conservation de la quantité de mouvement.
*Théorème du moment cinétique :
)0/;()0/()0/()0/( .0
RSGRARSRS VmVdtd
RAA
rrrr∧+
= σδ
Cas particuliers*Si A = G
0
/ )0/()0/()(R
GGSextG REREdtd
Fm
== σδ
rr
*Si A fixe dans R0
0
/ )0/()0/()(R
AASextA REREdtdFm
== σδ rr
Théorème de l’Energie-Puissance:
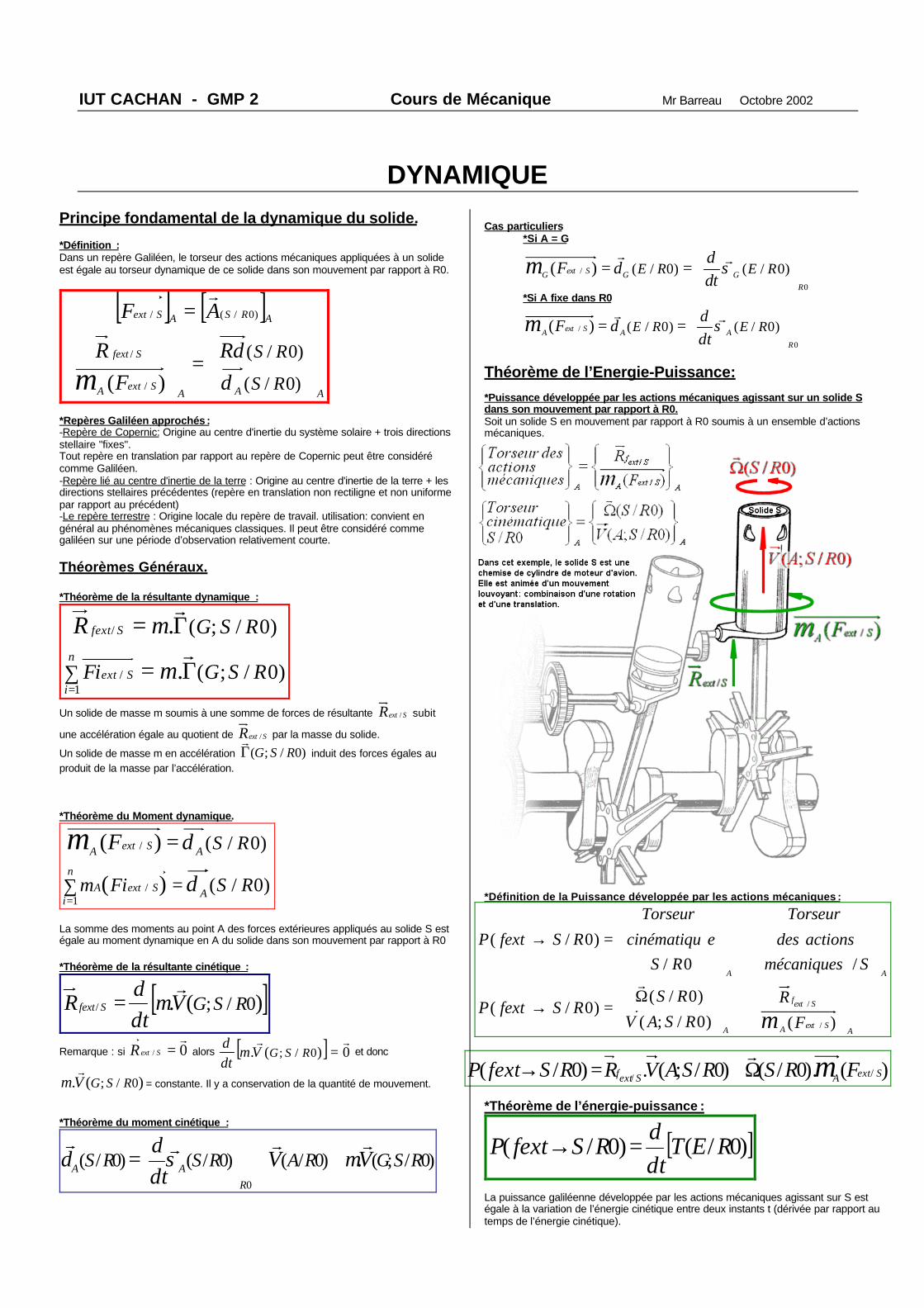
*Puissance développée par les actions mécaniques agissant sur un solide Sdans son mouvement par rapport à R0.Soit un solide S en mouvement par rapport à R0 soumis à un ensemble d’actionsmécaniques.
*Définition de la Puissance développée par les actions mécaniques :
ASextA
Sextf
A
AA
FR
RSAVRS
RSfextP
Smécaniquesactionsdes
Torseur
RSecinématiqu
TorseurRSfextP
m
⊗
Ω
=→
⊗
=→
)()0/;()0/(
)0/(
/0/)0/(
/
/
r
)().0/()0/;(.)0/( // SextASextf FRSRSAVRRSfextP mΩ+=→r
*Théorème de l’énergie-puissance :
[ ])0/()0/( RETdtd
RSfextP =→
La puissance galiléenne développée par les actions mécaniques agissant sur S estégale à la variation de l’énergie cinétique entre deux instants t (dérivée par rapport autemps de l’énergie cinétique).
Mouvements Particuliers.
*Solide S en Translation par rapportà R0 :
GG
RSGVRS
ecinématiqu
Torseur
=
)0/;(
0
0/
r
*Théorème de la résultante dynamique :
)0/;(./ RSGmR Sfext Γ=r
*Théorème du Moment dynamique.
0)0/()( /r
== RSGSextG Fm δ
*Théorème de l’énergie - puissanceLa puissance des actions mécaniques quis’appliquent au solide S :
)0/;(.)0/( / RSGVRRSfextP Sextf=→L’énergie cinétique :
)0/;(.21
)0/(2
RSGmRST Vr
=
= )0/;(.21
)0/;(.2
/ RSGmdtd
RSGVR VSextf
r
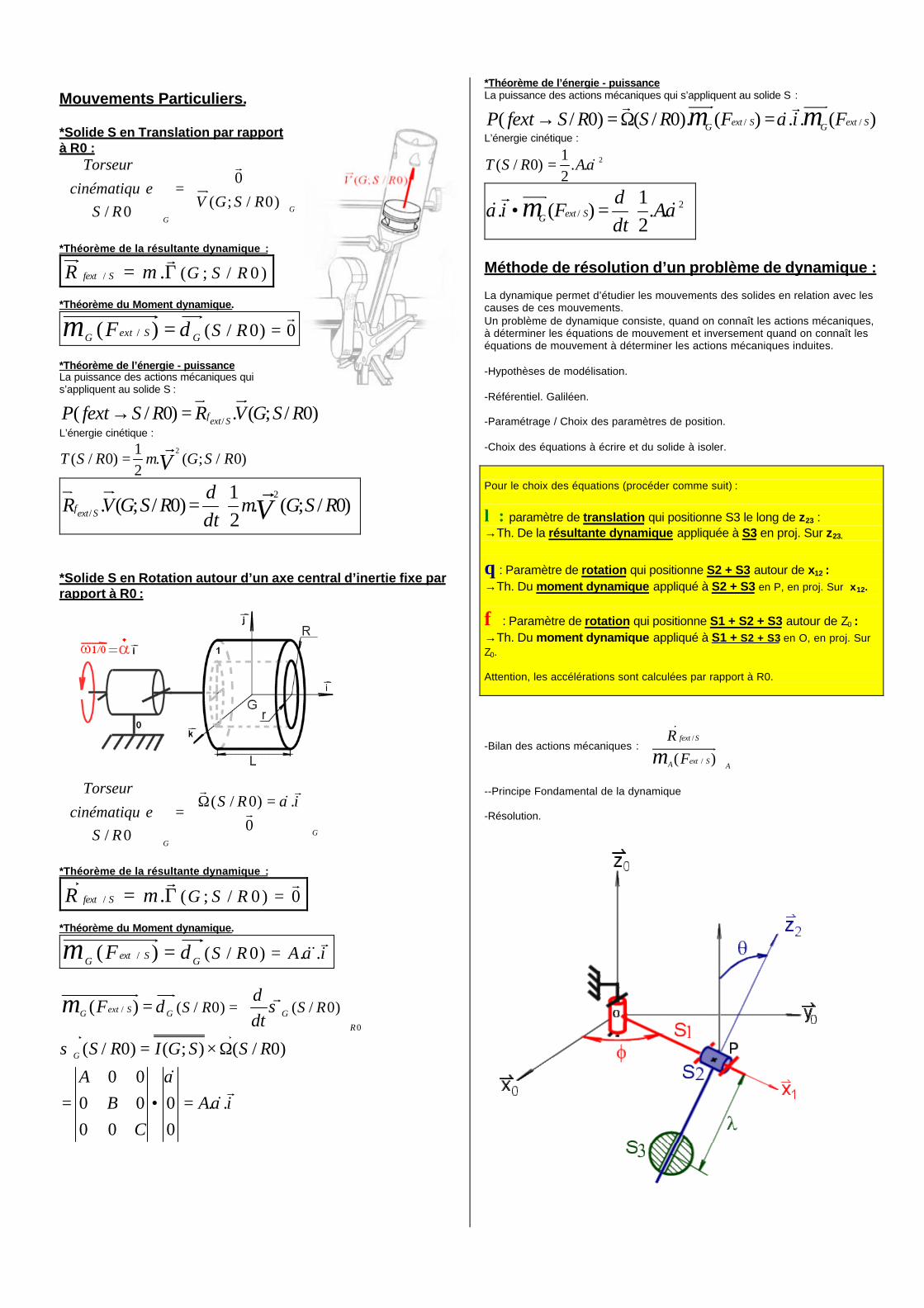
*Solide S en Rotation autour d’un axe central d’inertie fixe parrapport à R0 :
GG
iRS
RSecinématiqu
Torseur
=Ω
=
0
.)0/(
0/
rr
&r
α
*Théorème de la résultante dynamique :
0)0/;(./
rr=Γ= RSGmR Sfext
*Théorème du Moment dynamique.
iARSGSextG Fm r&& ..)0/()( / αδ ==
0
/ )0/()0/()(R
GGSextG RSRSdtd
Fm
= = σδ
r
iAC
BA
RSSGIRSG
r&
&
..00
000000
)0/();()0/(
αα
σ
=•=
Ω×=
*Théorème de l’énergie - puissanceLa puissance des actions mécaniques qui s’appliquent au solide S :
)(..)().0/()0/( // SextGSextG FiFRSRSfextP mm r&
rα=Ω=→
L’énergie cinétique :
2..21
)0/( α&ARST =
=• 2
/ ..21
)(. αα &r
& Adtd
Fi SextGm
Méthode de résolution d’un problème de dynamique :
La dynamique permet d’étudier les mouvements des solides en relation avec lescauses de ces mouvements.Un problème de dynamique consiste, quand on connaît les actions mécaniques,à déterminer les équations de mouvement et inversement quand on connaît leséquations de mouvement à déterminer les actions mécaniques induites.
-Hypothèses de modélisation.
-Référentiel. Galiléen.
-Paramétrage / Choix des paramètres de position.
-Choix des équations à écrire et du solide à isoler.
Pour le choix des équations (procéder comme suit) :
λ : paramètre de translation qui positionne S3 le long de z23 :→Th. De la résultante dynamique appliquée à S3 en proj. Sur z23.
θ : Paramètre de rotation qui positionne S2 + S3 autour de x12 :→Th. Du moment dynamique appliqué à S2 + S3 en P, en proj. Sur x12.
φ : Paramètre de rotation qui positionne S1 + S2 + S3 autour de Z0 :→Th. Du moment dynamique appliqué à S1 + S2 + S3 en O, en proj. SurZ0.
Attention, les accélérations sont calculées par rapport à R0.
-Bilan des actions mécaniques :
ASextA
Sfext
FR
m
)( /
/
--Principe Fondamental de la dynamique
-Résolution.





























