-
Jednosmerni ili asinhroni pogon?
Kriterijumi odluivanja:
Ukupne investicije. Trokovi eksploatacije i odravanja.
Performanse (dinamiki odziv, 4kvadrantni). Dimenzije, teina.
Pouzdanost.
Uticaj na okolinu.
Uticaj na izvor (mreu) i EMC.
Zagrevanje.
Poreenje motora:
Jednosmerni (DC)
Sloena konstrukcija.
Skup.
Zahteva znaajno odravanje.
Skuplji za odravanje.
Mogui nii vidovi zatite (IP).
Max brzina
3x - nekompenzovan,
5x - kompenzovan
Manji moment inercije
Asinhroni (AC)
Jednostavna konstrukcije.
Nia cena po kW.
Praktino bez odravanja.
Minimalni trokovi odravanja.
Visoki stepeni zatite (IP).
Max brzina 2,5x zbog prevalnog
momenta.
Vei moment inercije
Prodaja u prethodnom
periodu
-
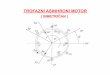
MOTOR JEDNOSMERNE STRUJE
Popreni presek jednosmernog motora:
Osnovni delovi:
S stator R rotor
GP glavni polovi PP pomoni polovi
KN kompenzacioni namotaj.
q osa ili poprena osa
d osa ili uzduna osa
if
f GP KN
S ia
if
if
f GP KN
ia
me,
f
a R PP PP
-
Slike motora jednosmerne struje
1. Mehanika
spojnica
2. Rotorska
zvezda
3. Limovi rotora
4. Poprene veze
rotora
5. Glavni pol
6. Namotaj
glavnog pola
7. Pokretni spoljni
poklopac
8. Kuite
9. Kompenza-
cioni namotaj
10.Drai etkica
na kuitu
11.Namotaj rotora
12.Spoj namotaja
rotora sa
kolektorom
13.Dra etkica
14.etkice
15.Kolektorska
krika
16.Dra kriki
17.Vratilo
18.Leaj
19.Leite leaja
20.Prstenovi za
podmazivanje
21.Rezervoar ulja
22.Postolje
23.Nosea ploa
-
komutatorski kraj
pogonski kraj
1. etkice
2. Opruge etkica
3. Leaj na komutatorskom kraju
4. Leaj na pogonskom kraju
5. Rotor (armatura)
6. Pomoni pol sa namotajem
7. Glavni pol i njegov namotaj
8. Dra leita (komutatorski kraj)
9. Zatitni poklopac
10. Konzola etkice
11. Ventilator na rotoru
12. Dra leita (pogonski kraj)
13. Kuite namotaja statora
-
Slike motora jednosmerne struje
-
Osobine: - pogodne mehanike karakteristike
- jednostavno upravljanje
- sloena konstrukcija (komutator)
- potrebno periodino odravanje
- mala preopteretljivost
(kompenzacioni namotaj)
- ograniena maksimalna brzina.
Primena: - regulisani pogoni
- elektrina vua.
-
POGON SA
MOTOROM JEDNOSMERNE STRUJE
NEZAVISNA POBUDA
Uproena, principijelna ema:
+
ua
+ +
uf
e
I
mm
me,
M f
ia
if Rf Lf
Nf
Ra La
-
Motor, reduktor, optereenje.
optereenje (valjak)
reduktor motor jednosmerne struje
-
Matematiki model, sistem jednaina:
diferencijalne jednaine:
aaaa
a iReudt
diL
fff
f
f
fffiRu
dt
dN
dt
iiLd
kkmmdt
dJ me
dt
dI
(1)
(2)
(3)
(4)
-
Konvertor za elik
objanjenje zavisnosti momenta optereenja od pozicije
0 + 900 900
I M
-
Konvertor za elik
objanjenje zavisnosti momenta optereenja od pozicije
-
algebarske jednaine:
ffce
f - ukupan fluks
afafe iicm
fffff iiLcifc
fff iL - kada je maina nezasiena
Karakteristika magneenja
-
f
if
Lf
fb
ifb
Lfb
f
Karakteristika magneenja
-
- uproenje jednaina;
- eliminacija dimenzija svih veliina osim vremena;
- svoenje vrednosti svih veliina na
isti nivo nezavisno od snage motora.
NORMALIZACIJA
A: N: A:
A: - apsolutni domen;
N: - normalizovani domen.
-
Postupak normalizacije:
bx
xx *
indeksi:
- * normalizovana vrednost veliine x;
- b bazna vrednost za veliinu x.
Napomena: Indeks "*" se moe izostaviti ako su sve veliine u
izrazu
normalizovane, ali se tada to mora naglasiti sa oznakom "N:". U
meovitim
izrazima indeks "*" je obavezan.
A:
Jednaine i izrazi u apsolutnom domenu.
N:
Jednaine i izrazi u normalizovanom domenu.
A:
Jednaine i izrazi u apsolutnom domenu.
-
Bazne vrednosti
osnovne (usvojene):
;anomab uu ;anomab ii ;nomb
izvedene:
;ab
abab
i
uR ;
b
abb
u
;bb c ;abbb icm
;1 bfb fi ;fbffb iLL ;ffb RR fbfbfb iRu
-
NORMALIZACIJA MATEMATIKOG MODELA POGONA
bbbbababab ciRu Jednaina (1) /
ab
a
ab
a
bb
f
ab
a
ab
a
ab
a
a
a
i
i
R
R
c
c
u
u
i
i
dt
d
R
R
R
L
******* aafaaaa iRuidt
dRT
** ff
*****
* 1afa
a
aa iu
Rdt
diT
Ta - elektromagnetna vremenska konstanta indukta.
!!!!!!!!!!
-
Jednaina (2) / fbfbfb Riu
fbf
ff
fb
f
b
f
fb
bf
fb
f
fb
ff
f
fb
iR
iR
u
u
dt
d
u
N
i
i
L
iL
dt
d
R
L
* * * ** *
f f f f
f f
d L i i dT T u i
f fdt dt
Kada je maina nezasiena:
!!!
1**
fi
fL
Tf elektromagnetna vremenska konstanta induktora.
!!!!!!!!!!
-
Jednaina (3) / abbabbb iicm
f ab m b b
b b b ab b b b b b
iJ m k kd
m dt i m m m
********
kkmi
dt
dT mafm
Tm mehanika vremenska konstanta pogona.
-
Jednaina (4) / b
bbb
b
dt
dI
**
dt
dT
Priroda veliine (poloaj) dozvoljava proizvoljno biranje njene
bazne vrednosti.
Za izabrano: Ibb /
dobija se: s1T
-
STATIKA
0
*
dt
d
-
STATIKE KARAKTERISTIKE POGONA
SA NEZAVISNO POBUENIM JEDNOSMERNIM MOTOROM
Jednaine (1), (2) i (3) u stacionarnom stanju:
A: aafa iRcu
fffff fRiRu
1
mmafe mkmicm
Iz jednaine (4) u stacionarnom stanju sledi:
= 0 !! Specijalni sluaj!!!
-
N:
aafaafa iRiRu
fff fiu 1
mmafe mkmim
U normalizovanom domenu:
-
U nominalnom reimu:
N:
ua nom = 1; ia nom = 1; nom = 1 .
Iz jednaine (1) se dobija:
!!!1 nomanomf R Ra nom - sopstveni otpor indukta.
!!!11 nomanomfnomf R
U praksi je:
A:
nomanomaabababnoma iuiuRR //
* 0a nomR
Kod manjih motora je Ra nom* vee, a kod veih motora je
manje.
-
Sada se moe napisati:
N:
1 nomfnomf
Takoe vai:
1 nomfnomfnomem
ali < 1 !!!
-
Iz jednaina koje vae u stacionarnom stanju dobijaju se
analitiki izrazi za statike karakteristike motora - pogona.
N:
0af
a
f
a iRu
0 brzina idealnog praznog hoda
promena brzine usled optereenja
afme imm
Takodje, dobija se i MEHANIKA KARAKTERISTIKA:
m
f
a
f
a mRu
2
-
UTICAJ DODATOG OTPORA U KOLU INDUKTA
NA STATIKE KARAKTERISTIKE
2
0
a a adm
f f
u R Rm
11
a
ad
a
ada
nom R
R
R
RR
Odnos promena brzine usled optereenja:
N:
-
a
m
f
ad
a
m
f
ad
a
m
f
ad
m
Rm
R
Rm
R
Rm
R
m
2
0
2
0
2
0
za0
za0
za0
1adR
2adR
3adR
Za odreeno optereenje (mm) brzina motora zavisi od vrednosti
dodatog otpora:
-
mm
mm o
1adR
2adR
3adR
0adR
Potencijalna
karakteristika
optereenja
mm
3 2 1 0ad ad adR R R
-
mm
mm o
1adR
2adR
3adR
0adR
Reaktivna
karakteristika
optereenja
mm mm
3 2 1 0ad ad adR R R
-
UTICAJ PROMENE NAPONA INDUKTA NA
OBLIK STATIKIH KARAKTERISTIKA
Pri konstantnoj pobudi motora (f = const) statike
karakteristike:
= i (ia) i = m (m'm)
Vane napomene:
1. u praksi je 1< ua < 1;
2. u praksi je f = f nom ;
3. posmatra se opseg promene optereenja u kome magnetna
reakcija indukta ne dolazi do izraaja (do m'mmax). Ovaj opseg
odreen je maksimalno dozvoljenom strujom motora (komutacijom) koja
je u praksi
const.maxmax anomfm im Prema tome:
ia max (1,5 2,5).
-
N
1
1
ia
N
-
UTICAJ PROMENE POBUDE NA OBLIK
STATIKIH KARAKTERISTIKA
Pri konstantnom naponu indukta (ua = ua nom = const.)
karakteristine vrednosti na mehanikoj karakteristici su:
N:
ffnomam um /1/0 0
brzina idealnog praznog hoda
afafnomak RRum //0
momenat kratkog spoja
Napomena: Ova vrednost momenta kratkog spoja je fiktivna,
stvarna vrednost momenta kratkog spoja je znatno manja
zbog uticaja magnetne reakcije indukta.
-
o
mk
mm
Promena statikih karakteristika
prilikom smanjenja fluksa.
-
Promena statikih karakteristika
prilikom smanjenja fluksa.
-
Kod promene pobude, maksimalni moment je funkcija fluksa:
fafm fim maxmax
smenom u i (ii ) dobija se:
max
maxmax
max
1
m
aaas
m
iiR HIPERBOLA!!!!!
Maksimalna dozvoljena struja odreuje oblast rada.
Za trajni rad u oblasti slabljenja polja, mora se voditi
rauna
o zagrevanju maine. U trajnom radu trebalo bi da struja
indukta bude manja ili jednaka nominalnoj.
a a nomi i
2
m m f a a a a a aP m i e i u i R i
-
Promene statike karakteristike prilikom smanjenja fluksa.
Kriva konstantne snage.
-
021
32 m
f
a
ff
mR
d
d
02 maextf mR
ma mR
4
1max HIPERBOLA - OBVOJNICA !!!!
Polazei od statike karakteristike 2
a am
f f
u Rm
Promenu brzine u funkciji promene fluksa dobiemo reavanjem
jednaine:
Zamenom reenja
u statiku karakteristiku, dobijamo maksimalnu brzinu pri
smanjenju pobude
Mehanika snaga je tada maksimalna : max max1
4m m
a
P mR
1a anomu u uz uslov:
-
Zbog konstruktivnih razloga brzina motora je ograniena:
)32(max k
Pa dobijamo:
1 a a max a maxs km max k
m max
R i im
1
4
km max k
a m max
mR
Praktino ima smisla samo smanjivati fluks:
max max
min min
maxmin
max max
ili ,
anom a anomnom
k k
f f f f nom
anom a a
k k
u R ie
u R ie
-
( s )( k )m maxm
( k )m maxm
max
,n nm
Crna linija Granica moguih radnih taaka.
uta linija Granica teorijski moguih radnih taaka.
Momenti na maksimalnoj brzini
Nominalna radna taka
-
KOMBINOVANO UPRAVLJANJE
(PROMENOM NAPONA INDUKTA I PREKO POBUDE)
N: ua f
fnom ua
e const.
-
PODRUJE MOGUIH RADNIH TAAKA U (mm; ) RAVNI.
N: max
max
A
B
C
D
E
A1
B1
C1
D1
E1
}
} ua=1 f < fnom
} ua= 1 f < fnom
0> ua >1
f = fnom
ua=1; f =fnom
mm
ua=1; f =fnom
ua = 0 } 0< ua
-
KOORDINATE KARAKTERISTINIH TAAKA U PODRUJU
MOGUIH RADNIH TAAKA U (mm; ) RAVNI NA PRIMERU.
A:
A1:
B: 0 899 1 0 9 1 8a nom a a max
B B f nom a B f nom a maxf nom
u R i. , R . , m i .
max
max
A
B
C
D
E
A1
B1
C1
D1
E1
1 1 11 33 1 0 9 1 8
a nom a a maxB B f nom a B f nom a max
f nom
u R i. , R . , m i .
B1:
0 1 2 i 3:
1 1 1 0 9 0 9
a a max max
nom anom f nom a e nom f nom a nom
Za R . , i
u , i , R . , m i .
1 1 1 10 4 0 8
a nom a a maxA max A A A a max
max
u R i, . , m i .
0 267 0 533
a nom a a maxA max A A A a max
max
u R i, . , m i .
-
KOORDINATE KARAKTERISTINIH TAAKA U PODRUJU
MOGUIH RADNIH TAAKA U (mm; ) RAVNI NA PRIMERU.
D:
max
max
A
B
C
D
E
A1
B1
C1
D1
E1
00 222 1 0 9
1 8
a a maxC C f nom a
f nom
C f nom a max
R i. , R . ,
m i .
1 1
1
00 222 1 0 9
1 8
a a maxC C f nom a
f nom
C f nom a max
R i. , R . ,
m i .
C1:
1 33 1 0 9 1 8a nom a a max
D D f nom a D f nom a maxf nom
u R i. , R . , m i .
D1:
1
0 899 1 0 9 1 8a nom a a max
D D f nom a D f nom a maxf nom
u R i. , R . , m i .
E: 3 0 4 0 8a nom a a max
E max E D E a maxmax
u R i, . , m i .
E1:
1 1 1 13 0 267 0 533
a nom a a maxE max E E E a max
max
u R i, . , m i .
C:
























![Pasivni filter Aktivni filter - pogoni.etf.rs Aktivni filter-Aktivni ispravljac_2018.pdf · Niskopropusni filter [2] - Ovi filteri se koriste za eliminisanje svih harmonijskih komponenti](https://img.pdfslide.net/doc/110x75/5e1af6c88d5ead14430499d2/pasivni-filter-aktivni-filter-aktivni-filter-aktivni-ispravljac2018pdf-niskopropusni.jpg)


