Embed Size (px)
Citation preview

Prepared by Kate Collins, Tim Webster, PhD, Nathan Crowell, Kevin McGuigan, Candace MacDonald Applied Geomatics Research Group NSCC, Middleton Tel. 902 825 5475 email: [email protected]
Submitted to Marc Ouellette Fisheries and Oceans Canada Gulf Region March 30, 2016

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page i
How to cite this work and report:
Collins, K., Webster, T., Crowell, N., McGuigan, K., MacDonald, C. 2016. Topo-Bathymetric Lidar and Photographic Survey
of Various Bays located in NB, NS, and PEI. Technical report, Applied Geomatics Research Group, NSCC Middleton, NS.
Copyright and Acknowledgement
The Applied Geomatics Research Group of the Nova Scotia Community College maintains full ownership of all data
collected by equipment owned by NSCC and agrees to provide the end user who commissions the data collection a
license to use the data for the purpose they were collected for upon written consent by AGRG-NSCC. The end user may
make unlimited copies of the data for internal use; derive products from the data, release graphics and hardcopy with
the copyright acknowledgement of “Data acquired and processed by the Applied Geomatics Research Group, NSCC”.
Data acquired using this technology and the intellectual property (IP) associated with processing these data are owned
by AGRG/NSCC and data will not be shared without permission of AGRG/NSCC.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page ii
Executive Summary
Three topographic-bathymetric lidar and photographic surveys were conducted in bay areas around the
southern Gulf of St. Lawrence, New Brunswick (NB), in the fall of 2015. Digital Elevation Models (DEMs), Digital
Surface Models (DSMs), Colour Shaded Relief models (CSRs), Depth Normalized Intensity models (DNI), and
ortho-rectified aerial photograph mosaics were generated for each study site.
Saint-Simon is a shallow estuary in northern NB and was surveyed on October 24, 2015. Lidar collection was
successful and penetration was achieved throughout the study area except for a wide, deep channel; minimum
seabed elevation was -5.1 m near the edge of the channel, referenced to the Canadian Geodetic Vertical Datum
of 1928 (CGVD28). The photographic survey of Saint-Simon revealed aquaculture floating on the surface and
submerged vegetation throughout the bay.
Tabusintac Bay, NB, is a shallow, eelgrass-containing bay north of Miramichi, NB. The northern portion of
Tabusintac Bay was surveyed on October 26, 2015 but water quality was poor because of a northwest wind that
induced waves which stirred up bottom sediment. The lidar data products suffered from lack of water column
penetration. A second survey was completed on November 10, 2015 when wind conditions were improved, and
the photographic and lidar products were improved. Unfortunately, this survey was aborted about two thirds
of the way through the survey due to a problem with the lidar system. The final DEM is a synthesis of the two
surveys referenced to a local Chart Datum (CD), and the minimum seabed elevation achieved by the lidar was -
5.75 m CD outside of the bay; good data coverage within the bay was achieved, excepting the deep channel,
and depths within the bay ranged from 1.5 m CD to -0.2 m CD. The photographic surveys at Tabusintac revealed
floating aquaculture on Oct. 26, but by Nov. 10 most of the aquaculture was removed from the surface.
Submerged vegetation can be seen in the aerial photographs.
A third survey was completed of Cocagne River, NB, east of Moncton, NB, on October 22, 2015. The study area
built upon a 2014 lidar survey of the Cocagne Harbour by AGRG. As with Saint-Simon and Tabusintac, the survey
of Cocagne River achieved excellent lidar coverage outside of the channel, with a maximum lidar penetration at
Cocagne of -2.6 m CGVD28 near the mouth of the river.
Ground truth surveys were conducted during the lidar surveys at each study area. The topographic ground truth
consisted of collecting elevation data on hard, flat surfaces; mean differences between the survey elevations
and the DEMs were 0.11 m, 0.20 m, and -0.05 m at Saint-Simon, Tabusintac, and Cocagne, respectively. The

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page iii
boat-based bathymetric ground truth surveys consisted of depth measurements to validate the lidar, Secchi
depth measurements for information on water clarity, and underwater photographs to obtain information on
bottom type and vegetation. Mean differences between the depth measurements, which were direct
measurements of the seabed using high precision GPS, and the DEMs were -0.22 m, -0.23 m, and -0.27 m, for
Saint-Simon, Tabusintac, and Cocagne, respectively. These negative numbers indicate that the DEMs were
shallower than the survey points of the seabed, an indication that the lidar did not penetrate to the bottom. A
possible explanation for this is the presence of a thick eelgrass canopy of approximately 0.20 m that attenuated
the laser pulse. Light sensors were deployed in Saint-Simon and Tabusintac approximately one month prior to
the lidar survey to provide information on water clarity as it related to wind speed and direction.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page iv
Table of Contents
Executive Summary ................................................................................................................................................................. ii
Table of Contents ................................................................................................................................................................... iv
Table of Figures ...................................................................................................................................................................... vi
List of Tables .......................................................................................................................................................................... ix
1 Introduction.................................................................................................................................................................... 1
1.1 Study Area ............................................................................................................................................................. 1
2 Methods ......................................................................................................................................................................... 2
2.1 Sensor Specifications and Installation ................................................................................................................... 2
2.2 Lidar Survey Details ............................................................................................................................................... 4
2.3 Ground Truth Data Collection ............................................................................................................................... 5
2.3.1 Light Sensors ..................................................................................................................................................... 7
2.3.2 Vegetation Ground Truth .................................................................................................................................. 8
2.4 Meteorological, Light and Tidal Conditions ......................................................................................................... 14
2.4.1 Meteorology .................................................................................................................................................... 14
2.4.2 Tide .................................................................................................................................................................. 17
2.4.3 Light ................................................................................................................................................................. 18
2.5 Elevation Data Processing ................................................................................................................................... 19
2.5.1 Lidar processing ............................................................................................................................................... 19
2.5.2 Ellipsoidal to Orthometric Height Conversion................................................................................................. 21
2.6 Lidar Validation .................................................................................................................................................... 22
3 Results .......................................................................................................................................................................... 22
3.1 Lidar Validation .................................................................................................................................................... 22
3.1.1 Topographic Validation ................................................................................................................................... 22
3.1.2 Bathymetric Validation .................................................................................................................................... 23
3.2 Surface Models .................................................................................................................................................... 26
3.2.1 Digital Elevation Models .................................................................................................................................. 26

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page v
3.2.2 Colour Shaded Relief Models .......................................................................................................................... 28
3.2.3 Normalized Intensity Models .......................................................................................................................... 31
3.3 Air Photos ............................................................................................................................................................ 34
4 Discussion ..................................................................................................................................................................... 39
4.1 Merging 2014 and 2014 Datasets ........................................................................................................................ 39
5 Conclusions................................................................................................................................................................... 42
6 References .................................................................................................................................................................... 43
7 Acknowledgements ...................................................................................................................................................... 43

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page vi
Table of Figures
Figure 1.1: The topographic-bathymetric lidar study areas in the Southern Gulf of St. Lawrence surveyed in 2014 (blue)
and 2015 (red) showing base stations (NB high precision network stations and a CHS benchmark, orange squares)
and Environment Canada Weather Stations (green triangles). ................................................................................. 2
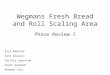
Figure 2.1: (A) Example of the Chiroptera II green laser waveform showing the large return from the sea surface and
smaller return from the seabed. (B) Schematic of the Chiroptera II green and NIR lasers interaction with the sea
surface and seabed (adapted from Leica Geosystems). ............................................................................................ 3
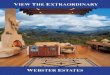
Figure 2.2: (a) Aircraft used for 2015 lidar survey; (b) display seen by lidar operator in-flight; (c) main body of sensor (right)
and the data rack(left); (d) large red circles are the lasers; the RCD30 lens (right) and low resolution camera quality
control(left). ............................................................................................................................................................... 4
Figure 2.3: Flight lines planned for the 2015 study areas (A) Saint-Simon Bay, (B) Tabusintac Bay North, and (C) Cocagne
River. .......................................................................................................................................................................... 5
Figure 2.4: Ground truth images (a) GPS base station set up over HPN monument at Cocagne; (b) RTK GPS depth
measurement using pole; (c) submerged Secchi disk; (d) Seaviewer underwater video camera; (e) 0.25 m2 quadrat
being deployed; (f) eelgrass at Tabusintac as photographed using quadrat. ............................................................ 6
Figure 2.5: Location of hard surface GPS validation points, underwater and onshore light sensors, and boat-based ground
truth waypoints at (A) Saint-Simon, (B) Tabusintac, and (C) Cocagne River. Note that no light sensors were
deployed in Cocagne River, and there were no roads in the Tabusintac North study area for hard surface validation.
................................................................................................................................................................................... 7
Figure 2.6: (a) A single light sensor secured to a cinder block (not used in PARR study areas); (b,d) underwater photo of
cinder block and light sensor deployment at Tabusintac (b) and Saint Simon (d); (c) the light sensors after being
retrieved from Tabusintac Bay in October................................................................................................................. 8
Figure 2.7: Saint Simon underwater photo ground truth on (a) October 9 and (b) October 24. N/A indicates no underwater
photograph was taken, or the visibility was too poor to assess eelgrass presence. Background image is RCD30
orthophoto RGB mosaic. .......................................................................................................................................... 10
Figure 2.8: Tabusintac underwater photo ground truth on (a) October 26 and (b) November 10. N/A indicates no
underwater photograph was taken, or the visibility was too poor to assess eelgrass presence. ........................... 11
Figure 2.9: Tabusintac underwater video ground truth on October 7. Orange and red boxes are zoomed in on the transect
at the center of the bay for eelgrass and water quality, respectively. .................................................................... 12
Figure 2.10: Cocagne River underwater photo ground truth on (a) October 8 and (b) October 22. N/A indicates no
underwater photograph was taken, or the visibility was too poor to assess eelgrass presence. Background image
is RCD30 orthophoto RGB mosaic. ........................................................................................................................... 13

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page vii
Figure 2.11: Wind speed (top panel) and direction (middle panel) collected at the EC weather station at Bas Caraquet
between October 15 and November 14, 2015 at 1 hour intervals. The lower panel shows a stick plot of the wind,
where the sticks point in the direction the wind is blowing, and the boxes indicates the lidar surveys (blue = Saint-
Simon, red = Tabusintac Survey 1, green = Tabusintac Surey 2). ............................................................................ 15
Figure 2.12: Wind speed (top panel) and direction (middle panel) collected at the EC weather station at Miramichi, NB
between October 15 and November 14, 2015 at 1 hour intervals. The lower panel shows a stick plot of the wind,
where the sticks point in the direction the wind is blowing, and the boxes indicates the lidar surveys (orange =
Cocagne, red = Tabusintac Survey 1, green = Tabusintac Surey 2). ......................................................................... 16
Figure 2.13: (a,b,c) Conditions at Tabusintac on October 26, where wind caused rough seas and reduced water clarity. (d)
shows improved conditions on November 10 during the second survey. .............................................................. 16
Figure 2.14: Tides for surveys at (a) Saint-Simon; (b) Tabusintac Survey 1; (c) Tabusintac Survey 2; (d) Cocagne. Grey bars
indicate daylight hours and red boxes indicate survey durations. .......................................................................... 17
Figure 2.15: Light sensor data at (a) Saint-Simon North and (b) Tabusintac. The % of underwater light is underwater light
divided by onshore light. Red boxes indicate lidar survey dates. The blue lines are an average of the two sensors
which were placed on each cinder block. ................................................................................................................ 18
Figure 3.1: Topographic lidar validation for (a) Saint-Simon, (b) Tabusintac, and (c) Cocagne. ........................................... 23
Figure 3.2: Bathymetric validation at (a) Saint-Simon; (b) Tabusintac; (c) Cocagne. ........................................................... 24
Figure 3.3: Saint Simon Bathymetry validation. .................................................................................................................... 24
Figure 3.4: Tabusintac Bathymetric Validation. .................................................................................................................... 25
Figure 3.5: Cocagne Bathymetric Validation. ........................................................................................................................ 25
Figure 3.6: Saint Simon Digital Elevation Model for entire study area and insets beside which are matched to the larger
figure by border colour. ........................................................................................................................................... 26
Figure 3.7: Tabusintac Digital Elevation Model for entire study area and insets beside which are matched to the larger
figure by border colour. The DEM is a sysnthesis of the two surveys (Oct. 26 and Nov 10). .................................. 27
Figure 3.8: Cocagne River Digital Elevation Model for entire study area and insets beside which are matched to the larger
figure by border colour. ........................................................................................................................................... 28
Figure 3.9: Saint-Simon Bay bare-earth Colour Shaded Releif Model showing the whole study area, and insets beside which
are matched to the larger figure by border colour. ................................................................................................. 29
Figure 3.10: Tabusintac Bay bare-earth North Colour Shaded Releif Model showing the whole study area, and insets beside
which are matched to the larger figure by border colour. ...................................................................................... 30
Figure 3.11: Cocagne River bare-earth Colour Shaded Releif Model showing the whole study area, and insets below which
are matched to the larger figure by border colour. ................................................................................................. 31

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page viii
Figure 3.12: Depth normalized intensity/amplitude for Saint-Simon, Oct. 24. The insets on the right corresepond to boxes
of matching colour on the large map. The red and yellow insets highlight the different intensity signal for
submerged eelgrass and sand, while the aqua inset shows floating (on the left) and submerged (on the right)
aquaculture cages (the othophoto for this panel is shown in Figure 3.15). ............................................................ 32
Figure 3.13: Depth normalized intensity/amplitude for Tabusintac. The insets on the right corresepond to boxes of
matching colour on the large map. The DNI is a sysnthesis of the two surveys (Oct. 26 and Nov 10). .................. 33
Figure 3.14: Depth normalized intensity/amplitude for Cocagne, Oct. 22. The insets on the bottom corresepond to boxes
of matching colour on the large map. ..................................................................................................................... 34
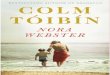
Figure 3.15: Saint-Simon Bay Orthophoto Mosaic from Oct. 24, 2015 showing the whole study area, and insets beside
which are matched to the larger figure by border colour. The insets, from top to bottom, highlight submerged
vegetation, the AGRG boat conducting ground truth surveys during the survey, and aquaculture,both submerged
and floating, in the southern part of the bay (same extent as Figure 3.12). ........................................................... 35
Figure 3.16: Tabusintac Bay North Oct. 26 Orthophoto Mosaic showing the whole study area, and insets beside which are
matched to the larger figure by border colour. ....................................................................................................... 36
Figure 3.17: Tabusintac Bay North Nov. 10 Orthophoto Mosaic showing the whole study area, and insets beside which are
matched to the larger figure by border colour. Note the absence of the aquaculture that was visible in Figure 3.16.
................................................................................................................................................................................. 37
Figure 3.18: Cocagne River True Colour Composite Orthophoto Mosaic showing the whole study area, and insets below
which are matched to the larger figure by border colour. ...................................................................................... 38
Figure 3.19: Photo products at Cocagne River showing the unenhanced orthophoto mosaic on the left, the enhanced true
colour composite in the middle, and the near infrared image on the right. Note how the enhanged images (TCC
and NIR) both show the submerged vegetation in much greater contrast and detail than the unenhanced photo.
................................................................................................................................................................................. 38
Figure 4.1: Study areas for Tabusintac North, which was surveyed in 2015 for this project, and Tabusintac South, which
was surveyed in 2014 for a PWGSC project. ............................................................................................................ 39
Figure 4.2: Study areas for Cocagne River, which was surveyed in 2015 for this project, and Cocagne Harbour, which was
surveyed in 2014, also for DFO Gulf Region. ........................................................................................................... 40
Figure 4.3: Tabusintac North, which was surveyed in 2015 for this project, and Tabusintac South, which was surveyed in
2014 for a PWGSC project........................................................................................................................................ 41
Figure 4.4: Study areas for Cocagne River, which was surveyed in 2015 for this project, and Cocagne Harbour, which was
surveyed in 2014, also for DFO Gulf Region. ........................................................................................................... 42

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page ix
List of Tables
Table 1: 2015 lidar survey dates. ............................................................................................................................................ 4
Table 2: Ground truth data summary. * Indicates that the ground truth survey was occurring simultanesouly with the lidar
survey. GPS Column: Two Leica GPS systems were used the GS14 and the 530. Depth Column: P=GPS antenna
threaded onto the large pole for direct bottom elevation measurement; M=manual depth measurement using
lead ball or weighted Secchi disk; DM=handheld single beam DepthMate echo sounder; ES=Single beam
commercial grade Humminbird Echo Sounder. Underwater Photos: P=GoPro camera secured to pole for
underwater still photos; Q50=0.25 m2 quadrat with downward-looking GoPro camera; SV=SeaViewer underwater
video camera. ............................................................................................................................................................. 6
Table 3. Lidar point classification Codes and descriptions. Note that ‘overlap’ is determined for points which are within a
desired footprint of points from a separate flight line; the latter of which having less absolute range to the laser
sensor. ...................................................................................................................................................................... 20

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 1
1 Introduction
The Program for Aquaculture Regulatory Research (PARR) is a government program that supports the successful
development of the Canadian aquaculture industry. This data presented here are part of a larger PARR-funded study
entitled “The effect of cultured filter feeders on eelgrass productivity in estuaries of NB and PEI” which is being led by
researchers at Fisheries and Oceans Canada in the Gulf Region in Moncton, NB. In 2015 the Applied Geomatics Research
Group (AGRG) at the Nova Scotia Community College (NSCC) surveyed three bays in NB using a topographic-bathymetric
lidar sensor equipped with a high resolution camera to complete the objectives of this study, “Topo-Bathymetric Lidar
and Photographic Survey of Various Bays located in NB, NS, and PEI”. The data products resulting from the surveys will
be used by researchers as part of the PARR project to investigate the relationship between eelgrass, depth, and
aquaculture in the bays in order to sustainably manage and grow the aquaculture industry in NB, NS, and PEI.
This report outlines the Study Area below, describes the lidar sensor and camera in Section 2.1 and the lidar survey
details in Section 2.2. The methods used for ground truth data collection, which included underwater photography,
depth and water clarity measurements, are described in detail in Section 2.3, and many of the ground truth data and
other supplementary data such as meteorological conditions and tides are presented in 2.4. The lidar and aerial
photograph processing procedures are outlined in Section 2.5, and the methods for validating both the topographic and
bathymetric lidar elevations are described in Section 2.6. Section 3 presents results of the lidar validation (Section 3.1),
the surface models (Section 3.2), and the air photos (Section 0). Discussion and Conclusion follow, and two separate
reports are delivered detailing the calibration of the sensor and the camera, and a Data Dictionary.
1.1 Study Area
The 2015 topographic-bathymetric lidar study areas built upon the areas completed in 2014 in the Southern Gulf of St.
Lawrence region (Figure 1.1) and added a new area. Tabusintac Bay South was completed in 2014 for Public Works and
Government Services Canada (PWGSC) and in 2015 the northern portion of the bay was surveyed for this project;
Cocagne Harbour was surveyed in 2014 and in 2015 the river portion of the estuary was surveyed; Saint-Simon Bay
North and South were both surveyed in 2015. These areas are all shallow inlets containing both eelgrass and shellfish
aquaculture.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 2
Figure 1.1: The topographic-bathymetric lidar study areas in the Southern Gulf of St. Lawrence surveyed in 2014 (blue) and 2015 (red) showing base stations (NB high precision network stations and a CHS benchmark, orange squares) and Environment Canada Weather Stations (green triangles).
2 Methods
2.1 Sensor Specifications and Installation
The lidar sensor used in this study is a Chiroptera II integrated topographic-bathymetric lidar sensor equipped with a 60
megapixel multispectral camera. The system incorporates a 1064 nm near-infrared laser for ground returns and sea
surface and a green 515 nm laser for bathymetric returns (Figure 2.1). The lasers scan in an elliptical pattern, which
enables coverage from many different angles on vertical faces, causes less shadow effects in the data, and is less
sensitive to wave interaction. The bathymetric laser is limited by depth and clarity, and has a depth penetration rating of
roughly 1.5 x the Secchi depth (a measure of turbidity or water clarity using a black and white disk). The Leica RCD30

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 3
camera collects co-aligned RGB+NIR motion compensated photographs which can be mosaicked into a single image in
post-processing, or analyzed frame by frame for maximum information extraction.
The calibration of the lidar sensor and camera have been documented in an external report which is included as part of
the deliverables for this project.
Figure 2.1: (A) Example of the Chiroptera II green laser waveform showing the large return from the sea surface and smaller return from the seabed. (B) Schematic of the Chiroptera II green and NIR lasers interaction with the sea surface and seabed (adapted from Leica Geosystems).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 4
Figure 2.2: (a) Aircraft used for 2015 lidar survey; (b) display seen by lidar operator in-flight; (c) main body of sensor (right) and the data rack(left); (d) large red circles are the lasers; the RCD30 lens (right) and low resolution camera quality control(left).
2.2 Lidar Survey Details
The lidar surveys were conducted in October and November, 2015 (Table 1). The surveys were planned using Mission
Pro software and flown at an altitude of 400 m above ground at a flying speed of 62 m/s. The planned flight lines for
each study area are shown in Figure 2.3. The aircraft required ground-based high precision GPS data to be collected
during the lidar survey in order to provide accurate positional data for the aircraft trajectory. Our Leica GS14 RTK GPS
system was used to set up a base station over a known monument (typically a New Brunswick High Precision Network
(HPN) or a Canadian Hydrographic Service Benchmark). The GPS base station was set to log observations at 1 second
intervals and the RTK rover was used to collect lidar validation points on hard flat surfaces (Figure 2.3).
Study Area Survey Date Survey Time (UTC)
Saint-Simon Bay, NB October 24, 2015 14:00 – 18:00
Tabusintac Bay North, NB October 26, 2015 12:30 – 15:00
Tabusintac Bay North, NB November 10, 2015 16:00 – 17:30
Cocagne River, NB October 22, 2015 16:00 – 18:30
Table 1: 2015 lidar survey dates.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 5
Figure 2.3: Flight lines planned for the 2015 study areas (A) Saint-Simon Bay, (B) Tabusintac Bay North, and (C) Cocagne River.
2.3 Ground Truth Data Collection
Ground truth data collection is an important aspect of topo-bathymetric lidar data collection. In 2015 we conducted our
traditional “time-of-flight” ground truth data including hard surface validation and depth measurements to validate the
lidar, Secchi depth measurements for information on water clarity, and underwater photographs to obtain information
on bottom type and vegetation (Table 2, Figure 2.4). For the 2015 field season, we employed a new system to measure
the seabed elevation directly using a large pole onto which we threaded the RTK GPS. This system helped to overcome
the challenges of validating 1 m resolution lidar bathymetry using 3-5 m resolution code-based GPS to obtain the boat-
based bathymetry spatial information. By threading the RTK GPS antenna on the pole and measuring the elevation of the
seabed directly we not only benefitted from the higher resolution spatial data of the RTK GPS (2-5 cm accuracy), we also
eliminated errors introduced into depth measurements obtained from a boat such as those caused by wave action, tidal
variation, and angle of rope for lead ball drop measurements (Figure 2.4c). Table 2 summarizes the ground truth
measurements undertaken for the three DFO PARR study areas in 2015, and Figure 2.5 shows a map of the distribution of
ground truth measurements. Base stations are shown on Figure 1.1.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 6
Location Date Base station GPS
System Secchi Depth
Light
Sensors
Underwater
Photos
Hard Surface
GPS
Saint-Simon
9-Oct-15 HPN 4674 GS14 Y P, M, ES Deployed P Y
24-Oct-15* HPN 4674 GS14 Y P, M, ES - P, Q50, SV -
11-Nov-15 HPN 4674 GS14 - P Retrieved - -
Tabusintac
7-Oct-15 Tabu_Wharf GS14 Y P,M, ES Deployed P, SV -
26-Oct-15* Tabu_Wharf GS14 Y P, M, ES Retrieved P, Q50 Y
10-Nov-15* Tabu_Wharf GS14 Y P, M - P,Q50 -
Cocagne
8-Oct-15 HPN 8650 530 Y DM, M N/A Q50 Y
22-Oct-15* HPN 8650 GS14 Y P, DM, M N/A P,Q50 -
Table 2: Ground truth data summary. * Indicates that the ground truth survey was occurring simultaneously with the lidar survey. GPS Column: Two Leica GPS systems were used the GS14 and the 530. Depth Column: P=GPS antenna threaded onto the large pole for direct bottom elevation measurement; M=manual depth measurement using lead ball or weighted Secchi disk; DM=handheld single beam DepthMate echo sounder; ES=Single beam commercial grade Humminbird Echo Sounder. Underwater Photos: P=GoPro camera secured to pole for underwater still photos; Q50=0.25 m2 quadrat with downward-looking GoPro camera; SV=SeaViewer underwater video camera.
Figure 2.4: Ground truth images (a) GPS base station set up over HPN monument at Cocagne; (b) RTK GPS depth measurement using pole; (c) submerged Secchi disk; (d) Seaviewer underwater video camera; (e) 0.25 m2 quadrat being deployed; (f) eelgrass at Tabusintac as photographed using quadrat.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 7
Figure 2.5: Location of hard surface GPS validation points, underwater and onshore light sensors, and boat-based ground truth waypoints at (A) Saint-Simon, (B) Tabusintac, and (C) Cocagne River. Note that no light sensors were deployed in Cocagne River, and there were no roads in the Tabusintac North study area for hard surface validation.
2.3.1 Light Sensors
The 2015 ground truth campaign also included the deployment of underwater light sensors. The sensors were Onset
HOBO Light and Temperature Pendant Sensors, which are wireless monitoring devices that can be deployed remotely
for months at a time and will log data at user selected intervals. For this study, two of the Hobo sensors were secured to
a cinder block (Figure 2.6) and deployed at two locations in Saint-Simon, and at one location in Tabusintac (Figure 2.5),
approximately one month prior to the lidar surveys (Table 2). The RTK pole was used to store the location of the sensor
deployment, and a rope was attached to a second block which was deployed nearby, so that the equipment could be
retrieved by dragging the anchor or grapple between the two GPS points. The Saint-Simon northern light sensors and
the Tabusintac sensors were retrieved following the lidar surveys, but field crews were unable to locate the Saint-Simon
southern sensors (Figure 2.5).
The Hobo light sensors measure ambient light rather than a specific bandwidth of light that is available for biology, but
they are inexpensive and provide data for research on how water clarity in each study area responded to physical
forcing such as wind speed and direction. The light sensor data are presented in Section 2.4.3.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 8
Figure 2.6: (a) A single light sensor secured to a cinder block (not used in PARR study areas); (b,d) underwater photo of cinder block and light sensor deployment at Tabusintac (b) and Saint Simon (d); (c) the light sensors after being retrieved from Tabusintac Bay in October.
2.3.2 Vegetation Ground Truth
Figure 2.7-Figure 2.10 show the locations of the underwater photographs conducted at Saint Simon, Tabusintac and
Cocagne. The photos were used to assign each photo a value for percent eelgrass cover, based on the SeaGrassNet
guidelines (http://www.seagrassnet.org/). Additionally, a qualitative visual inspection of the photos was completed to
assign a water quality metric to each photograph, where 0 was indicative of water with very low clarity, 0.5 indicated
medium clarity, or somewhat clear, and a rating of 1 indicated the water at that location at the time of the photograph
was very clear. An eelgrass percent cover value of N/A indicates that water quality was too poor to detect any eelgrass.
The 2550 Series Offshore Fast Trolling colour video camera from SeaViewer Underwater Video Systems was used in
Tabusintac for additional vegetation cover ground truth data collection. The video was streamed to a laptop in the boat
and recorded using Pinnacle Studio. GPS information from a Garmin handheld receiver was included in the video stream
via the Sea-Trak GPS Video Overlay system, also from SeaViewer. Eelgrass percent cover and water clarity metrics were
derived in the same way as for the underwater still photographs.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 9
At Saint-Simon, eelgrass percent cover was 0 in two locations, and ranged between 25% and 80% in the other 16 locations
(Figure 2.7). Water clarity was generally somewhat clear or clear; only four locations were classified as 0, or not clear. At
Tabusintac, eelgrass was only detected in one location on Oct. 26; poor water quality obscured the bottom and no
classification of eelgrass was possible (Figure 2.8a). On Nov. 10, eelgrass percent cover ranged from 5-55% and was
detected only on the eastern side of the bay, and water clarity remained poor on the western side of the bay (Figure 2.8b).
The underwater video imagery indicated eelgrass percent cover between 0% near the channel and up to 30% near the
center of the bay (Figure 2.9). At Cocagne eelgrass percent cover ranged from 0% in the channel to 95% elsewhere and
water clarity ranged between poor and moderate quality (Figure 2.10).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 10
Figure 2.7: Saint Simon underwater photo ground truth on (a) October 9 and (b) October 24. N/A indicates no underwater photograph was taken, or the visibility was too poor to assess eelgrass presence. Background image is RCD30 orthophoto RGB mosaic.
(a)
(b)

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 11
Figure 2.8: Tabusintac underwater photo ground truth on (a) October 26 and (b) November 10. N/A indicates no underwater photograph was taken, or the visibility was too poor to assess eelgrass presence.
(a)
(b)

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 12
Figure 2.9: Tabusintac underwater video ground truth on October 7. Orange and red boxes are zoomed in on the transect at the center of the bay to show eelgrass (orange box) and water quality (red box).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 13
Figure 2.10: Cocagne River underwater photo ground truth on (a) October 8 and (b) October 22. N/A indicates no underwater photograph was taken, or the visibility was too poor to assess eelgrass presence. Background image is RCD30 orthophoto RGB mosaic.
(a)
(b)

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 14
2.4 Meteorological, Light and Tidal Conditions
2.4.1 Meteorology
Meteorological conditions during and prior to topo-bathy lidar data collection are an important factor in successful data
collection. As the lidar sensor is limited by water clarity, windy weather has the potential to stir up any fine sediment in
the water and prevent good laser penetration. Rainy weather is not suitable for lidar collection, and the glare of the sun
must also be factored in for the collection of aerial photography. Before each lidar survey we monitored weather
forecasts using a variety of forecasting websites (www.intellicast.com, www.windfinder.com,
http://weather.gc.ca/marine/, http://weather.gc.ca/) as well as current and past conditions using the closest EC weather
station to the study sites. For Saint-Simon the nearest EC weather station was Bas Caraquet, the EC Miramichi station
was used for Cocagne, and as Tabusintac is located between these two stations we typically monitored both for a better
representation of weather at Tabusintac (Figure 1.1).
The wind during the lidar survey at Saint-Simon was suitable for good data collection. The wind was low at the onset of
the survey, and picked up to near 10 km/h towards the end of the survey, blowing from the south (Figure 2.11, blue
box). There were several days in the week preceding the survey when 30 km/hr wind from the northwest made
surveying unsuitable, but particulate matter stirred up from these events settled quickly. Cocagne River was surveyed on
Oct. 22 during a period of low wind (<10 km/hr) blowing from the south (Figure 2.12, yellow box). Wind events of 35
km/hr and 25 km/hr occurred on October 20 and 21, respectively, both blowing from the northwest, but the ground
crew found that any wind-induced turbidity had resolved by the time of the survey.
On October 26 at Tabusintac the wind at Miramichi was blowing from the northwest at nearly 20 km/hr (Figure 2.12, red
box), and closer to 30 km/hr at Bas Caraquet (Figure 2.11, red box). It was expected that the study area, being in the
northern section of Tabusintac Bay, would be sheltered somewhat from a northwest wind, which was forecast to be a
lighter wind, and so the survey was completed. However, the sediment stirred up by the wind presented challenges for
both the ground crew and the lidar data products. Figure 2.13a-c show the choppy water surface and poor water clarity
on October 26. Upon review of the data after survey completion, it was decided that a second attempt would be made
to survey Tabusintac. Operational and logistical challenges prevented survey activity during the calm weather in the first
week of November, the survey was attempted for a second time on November 10. Wind conditions were similar at Bas
Caraquet and Miramichi during the survey, blowing at ~20 km/hr from the northwest and changing to an eastern wind
during the survey. Figure 2.13d shows the improvement in conditions during the second survey, despite the similarities
in the wind speeds recorded during the two surveys. Unfortunately, the flight was aborted when it was two thirds
completed due to a problem with the lidar system. Overcoming these challenges to lidar operational efficiency related
to weather forecasts and publicly available observations is an active area of research at AGRG and is funded through an
NSERC Applied Research and Development grant.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 15
Figure 2.11: Wind speed (top panel) and direction (middle panel) collected at the EC weather station at Bas Caraquet between October 15 and November 14, 2015 at 1 hour intervals. The lower panel shows a stick plot of the wind, where the sticks point in the direction the wind is blowing, and the boxes indicates the lidar surveys (blue = Saint-Simon, red = Tabusintac Survey 1, green = Tabusintac Survey 2).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 16
Figure 2.12: Wind speed (top panel) and direction (middle panel) collected at the EC weather station at Miramichi, NB between October 15 and November 14, 2015 at 1 hour intervals. The lower panel shows a stick plot of the wind, where the sticks point in the direction the wind is blowing, and the boxes indicates the lidar surveys (orange = Cocagne, red = Tabusintac Survey 1, green = Tabusintac Survey 2).
Figure 2.13: (a,b,c) Conditions at Tabusintac on October 26, where wind caused rough seas and reduced water clarity. (d) shows improved conditions on November 10 during the second survey.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 17
2.4.2 Tide
Optimal data collection is a balance not only of water clarity and meteorological conditions, but also of daylight and tidal
stage. The surveys were completed as near to low tide as weather and daylight permitted in order to reduce the amount
of water that the laser was required to penetrate through in order to reach the seabed (Figure 2.14). On November 10
(Figure 2.14c) the second Tabusintac survey was delayed as long as possible as the forecast indicated lowest winds near
the late afternoon, and the decision was made to optimize for low wind rather than low tide. At Cocagne (Figure 2.14d),
the lowest tide was missed as the aircraft waited out some rain showers that were interfering with good lidar collection.
Transit times to each study area from the base of operations in Fredericton played a role in when an area was surveyed,
as well as time on the ground to refuel for larger areas (e.g., Saint-Simon).
Figure 2.14: Tides for surveys at (a) Saint-Simon; (b) Tabusintac Survey 1; (c) Tabusintac Survey 2; (d) Cocagne. Grey bars indicate daylight hours and red boxes indicate survey durations.
(a)
(b)
(c)
(d)

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 18
2.4.3 Light
The light sensor measures ambient light in units of Lux (lumens m-2). The sensors were calibrated prior to deployment by
mounting all sensors in direct sunlight for 250 minutes and grouping them based on similar readings after the calibration
trial. The percent of underwater light was calculated to remove the effects of variations in cloud cover using the following
equation:
% 𝑈𝑊 𝑙𝑖𝑔ℎ𝑡 = 100 ×𝑈𝑊 𝑙𝑖𝑔ℎ𝑡
𝑂𝑆 𝑙𝑖𝑔ℎ𝑡
where UW = underwater and OS=onshore. Figure 2.15 shows the variations in light due to water clarity and tide at Saint-
Simon and Tabusintac; note the difference in y-axis at each study site. At Saint Simon, the sensors were deployed in
approximately 3 m of water near low tide, and typically less than 5% of sunlight available at the surface reached the
sensors. At Tabusintac the sensors were deployed in approximately 1 m of water at low tide and typically about 20% of
light available at the surface reached the sensors.
Figure 2.15: Light sensor data at (a) Saint-Simon North and (b) Tabusintac. The % of underwater light is underwater light divided by onshore light. Red boxes indicate lidar survey dates. The blue lines are an average of the two sensors which were placed on each cinder block.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 19
2.5 Elevation Data Processing
2.5.1 Lidar processing
2.5.1.1 Point Cloud Processing
Once the GPS trajectory was processed for the aircraft utilizing the GPS base station and aircraft GPS observations were
combined with the inertial measurement unit, the navigation data was linked to the laser returns and georeferenced.
Lidar Survey Studio (LSS) software accompanies the Chiroptera II sensor and is used to process the lidar waveforms into
discrete points. The data can then be inspected to ensure there was sufficient overlap (30%) and no gaps exist in the
lidar coverage.
One critical step in the processing of bathymetric lidar is the ability to map the water surface. This is critical for two
components of georeferencing the final target or targets that the reflected laser pulse recorded: the refraction of the
light when it passes from the medium of air to water and the change in the speed of light from air to water. The LSS
software computes the water surface from the lidar returns of both the topo and bathy lasers. In addition to classifying
points as land, water surface or bathymetry, the system also computes a water surface that ensures the entire area of
water surface is covered regardless of the original lidar point density. As mentioned, part of the processing involves
converting the raw waveform lidar return time series into discrete classified points using LSS signal processing; points
include ground, water surface, seabed, etc. Waveform processing may include algorithms specifically for classifying the
seabed. The points were examined in LSS both in plan view and in cross-section view. The waveforms can be queried for
each point so that the location of the waveform peak can be identified and the type of point defined, for example water
surface and bathymetry.
The LAS files were read into TerraScanTM with the laser returns grouped by laser type so they could be easily separated,
analyzed and further refined. Because of the differences in the lidar footprint between the topo and bathy lasers, the
bathy point returns would be used to represent the water surface and bathymetry points and the topo points would be
used to represent targets on the land. See Table 3 and the attached Data Dictionary report for the classification codes
for the delivered LAS 1.2 files. The refined classified LAS files were read into ArcGISTM and a variety of raster surfaces at a
2 m spatial sampling interval were produced.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 20
Table 3. Lidar point classification Codes and descriptions. Note that ‘overlap’ is determined for points which are within a desired footprint of points from a separate flight line; the latter of which having less absolute range to the laser sensor.
Class number Description
0 Water model
1 Bathymetry (Bathy)
2 Bathy Vegetation
3 N/A
4 Topo laser Ground
5 Topo laser non-ground (vegetation & buildings)
6 Hydro laser Ground
7 Bathy laser non-ground
8 Water
9 Noise
10 Overlap Water Model
11 Overlap Bathy
12 Overlap Bathy Veg
13 N/A
14 Overlap Topo Laser Ground
15 Overlap Topo Laser Veg
16 Overlap Bathy Laser Ground
17 Overlap Bathy Laser Veg
18 Overlap Water
19 Overlap Noise
2.5.1.2 Gridded Surface Models
There are three main data products derived from the lidar point cloud. The first two are based on the elevation and
include the Digital Surface Model (DSM) which incorporates valid lidar returns from vegetation, buildings, ground and
bathymetry returns, and the Digital Elevation Model (DEM) which incorporates ground returns above and below the
water line. The third data product is the intensity of the lidar returns, or the reflectance of the bathy laser. The lidar
reflectance, or the amplitude of the returning signal from the bathy laser, is influenced by several factors including water
depth, the local angle of incidence with the target, the natural reflectivity of the target material, the transmission power
of the laser and the sensitivity of the receiver.
2.5.1.3 Depth Normalization of the Green Laser
The amplitude of the returning signal from the bathy laser provides a means of visualizing the seabed cover, and is
influenced by several factors including water depth and clarity, the local angle of incidence with the target, the natural
reflectivity of the target material, and the voltage or gain of the transmitted lidar pulse. The raw amplitude data are

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 21
difficult to interpret because of variances as a result of signal loss due to the attenuation of the laser pulse through the
water column at different scan angles. Gridding the amplitude value from the bathy laser results in an image with a wide
range of values that are not compensated for depth and have significant differences for the same target depending on the
local angle of incidence from flight line to flight line. As a result, these data are not usable as is for quantitative analysis
and are difficult to interpret for qualitative analysis. We have designed a process to normalize the amplitude data for
signal loss in a recent publication (Webster et al, 2016). The process involved sampling the amplitude data from a location
with homogeneous seabed cover (e.g., sand or eelgrass) over a range of depths. These data were used to establish a
relationship between depth and the logarithm of the amplitude value. The inverse of this relationship was used with the
depth map to adjust the amplitude data so that they could be interpreted without the bias of depth. A depth normalized
amplitude/intensity image (DNI) was created for each study site using this technique that can be more consistently
interpreted for the seabed cover material. Note that this analysis considers only bathymetric lidar values and ignores any
topographic elevation points.
2.5.1.4 Aerial Photo Processing
The RCD30 60 MPIX imagery was processed using the aircraft trajectory and direct georeferencing. The low altitude and
high resolution of the imagery required that the lidar data be processed first to produce bare-earth digital elevation
models (DEMs) that were used in the orthorectification process. The aircraft trajectory, which blends the GPS position
and the IMU attitude information into a best estimate of the overall position and orientation of the aircraft during the
survey. This trajectory, which is linked to the laser shots and photo events by GPS based time tags, is used to define the
Exterior Orientation (EO) for each of the RCD30 aerial photos that were acquired. The EO, which has traditionally been
calculated by selecting ground control point (x, y, and z) locations relative to the air photo frame and calculating a
bundle adjustment, was calculated using direct georeferencing and exploiting the high precision of the navigation
system. The EO file defines the camera position (x, y, z) for every exposure as well as the various rotation angles about
the x, y and z axis known as omega, phi and kappa. The EO file along with a DEM was used with the aerial photo to
produce a digital orthophoto. After the lidar data were processed and classified into ground points, the lidar-derived
DEM (above and below the water line) was used in the orthorectification process in Erdas Imagine software and
satisfactory results were produced.
2.5.2 Ellipsoidal to Orthometric Height Conversion
The original elevation of any lidar products are referenced to the same elevation model as the GPS they were collected
with. This model is a theoretical Earth surface known as the ellipsoid, and elevations referenced to this surface are in
ellipsoidal height (GRS80). To convert them to orthometric height (OHt), which is height relative to the Canadian
Geodetic Vertical Datum of 1928 (CGVD28), an offset must be applied. The conversions are calculated based on the
geoid-ellipsoid separation model, HT2, from Natural Resources Canada.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 22
Study Area Conversion
Saint-Simon Ellipsoid to CVGD28
Tabusintac CHS Local Benchmark
Cocagne Ellipsoid to CVGD28
2.6 Lidar Validation
Ground elevation measurements obtained using the RTK GPS system were used to validate the topographic lidar returns
on areas of hard, flat surfaces. At Saint-Simon and Cocagne the GPS antenna was mounted on a vehicle and data were
collected along roads within the study areas, while at Tabusintac points were collected along the only hard surface within
the study area, the wharf (Figure 2.5).
Boat-based ground truth data were used to validate the bathymetric lidar returns (Figure 2.5). Although various methods
were used to measure depth during fieldwork, only points measured using the large pole fitted with the RTK GPS antenna
to directly measure the seabed were used for the accuracy assessment; points that measured depth using sonar or a
weighted rope were not considered.
For both hard surface and boat-based GPS points, the differences in the GPS elevation and the lidar elevation (∆Z) were
calculated by extracting the lidar elevation from the DEM at the checkpoint and subtracting the lidar elevation from the
GPS elevation. GPS points were subject to a quality control assessment such that the standard deviation of the elevation
was required to be < 0.05 m.
3 Results
3.1 Lidar Validation
3.1.1 Topographic Validation
At Saint-Simon there were 3030 data points collected along the roads with a calculated mean ∆Z of 0.11 m ± 0.03 m; at
Tabusintac there were 47 data points collected along the wharf and parking lot with a mean ∆Z of 0.20 m ± 0.07 m; at
Cocagne there were 3154 data points collected along the roads, mean ∆Z was 0.05 m ± 0.03 m.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 23
Figure 3.1: Topographic lidar validation for (a) Saint-Simon, (b) Tabusintac, and (c) Cocagne.
3.1.2 Bathymetric Validation
At all three study areas the mean ∆Z was negative, an indication that the DEM elevation is less (shallower) than the
observed GPS point. At Saint-Simon, there were 21 GPS points, mean ∆Z was -0.22 m ± 0.27 m; at Tabusintac there were
35 GPS points, mean ∆Z was -0.23 m ± 0.22 m; at Cocagne there were 28 GPS points, mean ∆Z was -0.27 m ± 0.18 m. It is
possible that the bathymetric laser encountered difficulty in penetrating through the vegetation cover to the seabed,
resulting in a derived seabed that is actually representative of the elevation of the eelgrass beds.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 24
Figure 3.2: Bathymetric validation at (a) Saint-Simon; (b) Tabusintac; (c) Cocagne.
Figure 3.3: Saint Simon Bathymetry validation.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 25
Figure 3.4: Tabusintac Bathymetric Validation.
Figure 3.5: Cocagne Bathymetric Validation.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 26
3.2 Surface Models
This section presents Digital Elevation Models (DEMs), Colour Shaded Relief Models, and Depth Normalized Intensity
Models for each study area. Each figure in this section includes several sub-panels that focus in on features at a closer
scale.
3.2.1 Digital Elevation Models
The Digital Elevation Models for each study area are presented in Figure 3.6 to Figure 3.8. In these figures the minimum
and maximum extents of the sub-panels have been adjusted for maximum contrast. Elevation at Saint Simon ranged from
26.6 m elevation on land to a minimum seabed elevation of -5.1 m CGVD28 near the edges of the channel (Figure 3.6).
The bathymetric laser did not penetrate the deepest portions of the channel; even the where the river enters the bay in
the north (Figure 3.6, aqua sub-panel) we see that the channel is missing. The yellow sub-panel reveals an area that was
perhaps dredged to allow boats to access the channel.
Figure 3.6: Saint Simon Digital Elevation Model for entire study area and insets beside which are matched to the larger figure by border colour.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 27
At Tabusintac, the DEM is a synthesis of the two surveys (Oct. 26 and Nov 10). Recall that the first survey on Oct. 26
covered the entire study area but suffered from poor water quality, and the second survey on Nov. 10 covered only the
western portion of the area of interest with improved water quality. The final blended DEM ranges from 20.81 m CD on
land to -5.75 m CD at the southeastern extent of the study area, outside of the bay (Figure 3.7). The main channel that
extends from the southern portion of Tabusintac bay was not detected by the lidar, but the remainder of the bay was;
depths on the western side ranged from -0.2 to 0.8 m CD, and 0 to 1.5 m CD on the shallow eastern side. Both of the inset
panels show much greater detail in the bathymetry near the eastern edge of the bay, where channels cut through the
shallow, dynamic seabed.
Figure 3.7: Tabusintac Digital Elevation Model for entire study area and insets beside which are matched to the larger figure by border colour. The DEM is a synthesis of the two surveys (Oct. 26 and Nov 10).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 28
The Cocagne River DEM ranged from 42.5 m on land to -2.6 m CGVD28 in the water (Figure 3.8). As in the other study
sites, the channel was not penetrated by the lidar but coverage elsewhere was excellent, revealing a mostly flat region
surrounding the main river channel. The inset panels show river braiding upstream (aqua inset), a shallow bay in the
southern region of the study area (yellow inset), and the main highway bridge over the widest portion of the channel (red
inset).
Figure 3.8: Cocagne River Digital Elevation Model for entire study area and insets beside which are matched to the larger figure by border colour.
3.2.2 Colour Shaded Relief Models
The Colour Shaded Relief Models (CSRs) presented in Figure 3.9 to Figure 3.11 show mainly the same features highlighted
in the DEMs (Figure 3.6 to Figure 3.8), but the shadow effect accentuates the features differently, allowing more details
to be examined. The CSRs are built on the DEMs rather than the DSMs, and use a standard colour scale for the land and a
custom colour scale for the bathymetry; 0 m CGVD28 marks the break between land (shades of green for lowlands and
red for higher elevations) and ocean (shades of blue, deeper means darker). At Saint Simon (Figure 3.9) the red inset
highlights the way the seabed morphology near the protruding spits, provides more detail on the nature of the subsea
dredging (yellow inset) and clearly identifies where the lidar penetrated to the river channel and where it missed (aqua

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 29
inset). The Tabusintac CSR emphasizes the different textures in the seabed, where some areas appear very smooth and
others fairly rough (Figure 3.10). The CSR products distinguish land and ocean more clearly than the DEM images, showing
the exposed land in the river clearly at Cocagne River (Figure 3.11, aqua inset).
Figure 3.9: Saint-Simon Bay bare-earth Colour Shaded Relief Model showing the whole study area, and insets beside which are matched to the larger figure by border colour.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 30
Figure 3.10: Tabusintac Bay bare-earth North Colour Shaded Relief Model showing the whole study area, and insets beside which are matched to the larger figure by border colour.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 31
Figure 3.11: Cocagne River bare-earth Colour Shaded Relief Model showing the whole study area, and insets below which are matched to the larger figure by border colour.
3.2.3 Normalized Intensity Models
The depth normalized intensity models (DNIs) can be a powerful tool to reveal submerged features and bottom type
information that the air photos and DEM may not show. The amplitude data also show a great deal of contrast between
brightly coloured seabed and the dark colour of eelgrass. At Saint-Simon, this contrast is shown clearly in the red and
yellow insets (Figure 3.12), while the aqua-coloured inset shows floating aquaculture cages on the left of the image, and
submerged cages on the right. The intensity signal is slightly different for the floating and submerged cages, but the air
photos confirm which are floating and which are submerged in Figure 3.15. In other cases, the submerged cages are not
visible at all in the air photos, but can be identified using the DNI image. At Tabusintac and Cocagne River, vegetation and
interesting bottom features are revealed in the intensity data (Figure 3.13 and Figure 3.14, respectively).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 32
Figure 3.12: Depth normalized intensity/amplitude for Saint-Simon, Oct. 24. The insets on the right correspond to boxes of matching colour on the large map. The red and yellow insets highlight the different intensity signal for submerged eelgrass and sand, while the aqua inset shows floating (on the left) and submerged (on the right) aquaculture cages (the orthophoto for this panel is shown in Figure 3.15).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 33
Figure 3.13: Depth normalized intensity/amplitude for Tabusintac. The insets on the right correspond to boxes of matching colour on the large map. The DNI is a synthesis of the two surveys (Oct. 26 and Nov 10).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 34
Figure 3.14: Depth normalized intensity/amplitude for Cocagne, Oct. 22. The insets on the bottom correspond to boxes of matching colour on the large map.
3.3 Air Photos
The air photo products are presented in Figure 3.15 through Figure 3.18. As discussed, the mosaic generation can be a
challenging process, especially during the fall when sun angle is low. However, the high quality and 5 cm resolution of the
photos is clear in the sub-panel images. At Saint-Simon, for example, submerged vegetation can be clearly identified in
many areas, the AGRG survey vessel was spotted looking for the light sensors, and both floating and submerged
aquaculture was detected (Figure 3.15). At Tabusintac, aquaculture was present during the Oct. 26 survey photos (Figure
3.16), but most of it had been removed from the surface by the Nov. 10 survey (Figure 3.17). The Tabusintac photos reveal
a great deal about bottom type, and submerged vegetation can be seen in the Cocagne River photos as well (Figure 3.18).
For data delivery the original 16-bit photos were converted to 8-bit, with four bands (red, green, blue, and near infrared).
True Colour Composite (TCC) images and Near Infrared (NIR) images were also produced. The TCC images are composed
of the red, green and blue bands saved in a JPEG 2000 format, and the NIR images are a composition of the near infrared,
green and blue bands, and saved in a JPEG 2000 format. An example of the differences between these images and the
typical 5 cm orthophoto at Cocagne shows how the enhanced images (TCC and NIR) provide more contrast and detail than
the unenhanced orthophoto (Figure 3.19).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 35
Figure 3.15: Saint-Simon Bay Orthophoto Mosaic from Oct. 24, 2015 showing the whole study area, and insets beside which are matched to the larger figure by border colour. The insets, from top to bottom, highlight submerged vegetation, the AGRG boat conducting ground truth surveys during the survey, and aquaculture, both submerged and floating, in the southern part of the bay (same extent as Figure 3.12).

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 36
Figure 3.16: Tabusintac Bay North Oct. 26 Orthophoto Mosaic showing the whole study area, and insets beside which are matched to the larger figure by border colour.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 37
Figure 3.17: Tabusintac Bay North Nov. 10 Orthophoto Mosaic showing the whole study area, and insets beside which are matched to the larger figure by border colour. Note the absence of the aquaculture that was visible in Figure 3.16.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 38
Figure 3.18: Cocagne River True Colour Composite Orthophoto Mosaic showing the whole study area, and insets below which are matched to the larger figure by border colour.
Figure 3.19: Photo products at Cocagne River showing the unenhanced orthophoto mosaic on the left, the enhanced true colour composite in the middle, and the near infrared image on the right. Note how the enhanced images (TCC and NIR) both show the submerged vegetation in much greater contrast and detail than the unenhanced photo.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 39
4 Discussion
4.1 Merging 2014 and 2014 Datasets
The 2014 and 2015 study areas for Tabusintac and Cocagne are shown in Figure 4.1and Figure 4.2, respectively, and the
DEMs for both years are shown in Figure 4.3 and Figure 4.4.
Figure 4.1: Study areas for Tabusintac North, which was surveyed in 2015 for this project, and Tabusintac South, which was surveyed in 2014 for a PWGSC project.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 40
Figure 4.2: Study areas for Cocagne River, which was surveyed in 2015 for this project, and Cocagne Harbour, which was surveyed in 2014, also for DFO Gulf Region.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 41
Figure 4.3: Tabusintac North, which was surveyed in 2015 for this project, and Tabusintac South, which was surveyed in 2014 for a PWGSC project.

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 42
Figure 4.4: Study areas for Cocagne River, which was surveyed in 2015 for this project, and Cocagne Harbour, which was surveyed in 2014, also for DFO Gulf Region.
5 Conclusions
Topographic-bathymetric lidar and photographic surveys were conducted Saint-Simon, Tabusintac North, and Cocagne
River, NB, in October and November of 2015. The Tabusintac North and Cocagne River surveys built upon existing lidar
surveys from 2014. Digital Elevation Models (DEMs), Digital Surface Models (DSMs), Colour Shaded Relief models (CSRs),
Depth Normalized Intensity models (DNI), and orthorectified aerial photograph mosaics were generated for each study
site. Lidar collection was successful at all three bays except for the deep channels. Two surveys were required at
Tabusintac in order to achieve seabed penetration throughout the study area. Minimum seabed elevations achieved
were -5.1 m CGVD28 at Saint-Simon, -5.75 m CD at Tabusintac North, and -2.6 m CGVD28 at Cocagne River. The air
photos show floating and submerged aquaculture infrastructure and submerged vegetation at 5 cm resolution. Depth
normalized intensity maps that represent bottom type were generated and show sharp contrast between sandy and

Topo-Bathymetric Lidar and Photographic Survey of Various Bays located in NB, NS, and PEI
Applied Geomatics Research Group Page 43
vegetated seabed. Additionally, the intensity maps show submerged aquaculture that is not visible in the air photos.
Time of flight ground truth surveys at each study site were conducted to obtain underwater photographs, depth and
water clarity measurements.
6 References
Webster, T., McGuigan, K., Crowell, N., Collins, K., and MacDonald, C. in press. Optimization of data collection and
refinement of post-processing techniques for Maritime Canada’s first shallow water topographic-bathymetric lidar
survey In: Roberts, T.M., Rosati, J.D., and Wang, P. (eds.), Advances in Topobathymetric Mapping, Models, and
Applications. Journal of Coastal Research, Special Issue.
7 Acknowledgements
We would like to thank scientists at DFO Moncton for their support and the Government of Canada for funding support.
We would especially like to thank Matt Roscoe, Calvin Gough, Ariel Vallis, Sean Dzafovic and David Kristiansen of NSCC’s
AGRG for their assistance with collection of ground truth data and data processing for this project. Thanks to staff from
Airborne Hydrography and Leica Geosystems and LEG staff for operations support, and AGRG staff for administrative
support.