Embed Size (px)
Citation preview
1
MEAM 211
University of Pennsylvania 1
Kinematics of Planar Rigid Bodies
Chapter 6
2
MEAM 211
University of Pennsylvania 2
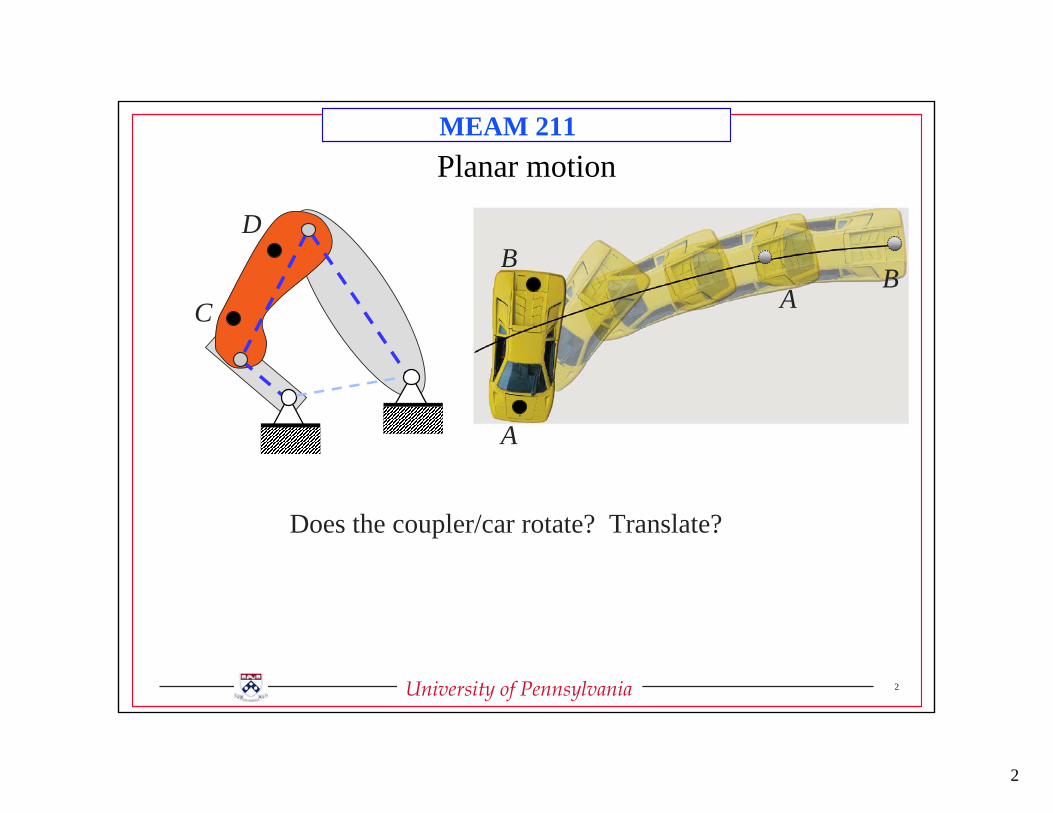
Planar motion
C
D
A
BA
B
Does the coupler/car rotate? Translate?
3
MEAM 211
University of Pennsylvania 3
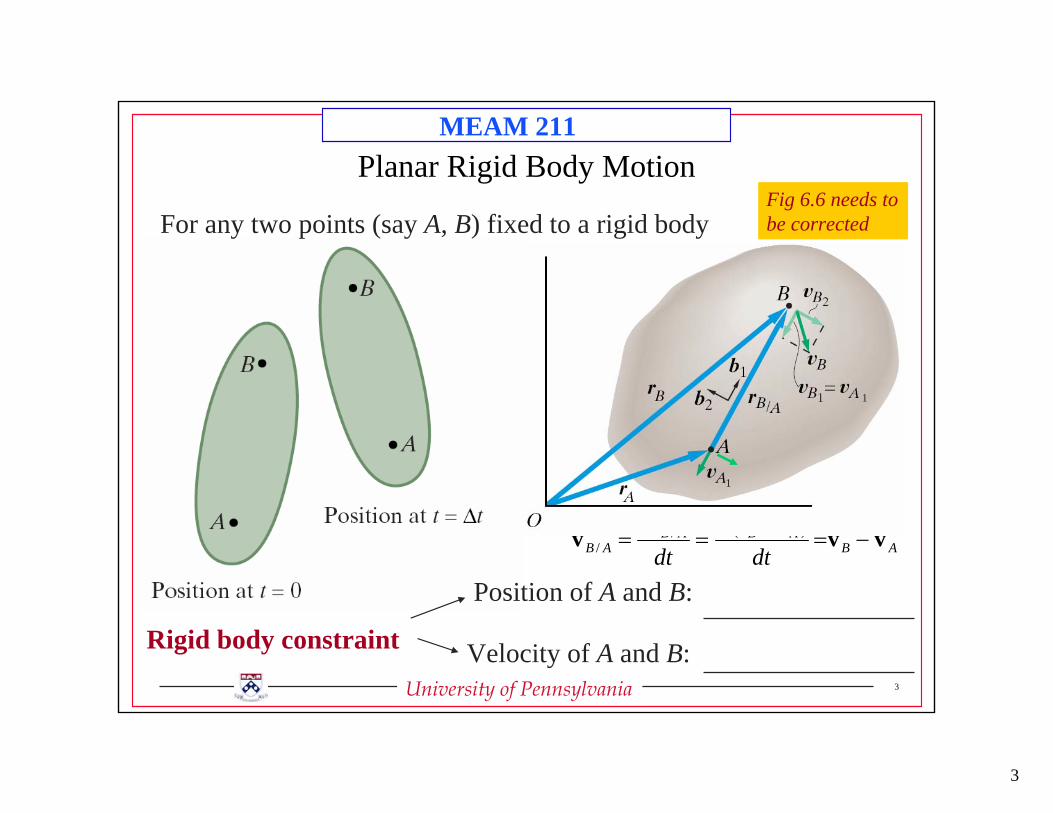
Planar Rigid Body Motion
For any two points (say A, B) fixed to a rigid body
Rigid body constraint
Position of A and B:
Velocity of A and B:
( )AB
ABABAB dt
ddt
d vvrrrv −=−
== //
1
1
Fig 6.6 needs to be corrected
4
MEAM 211
University of Pennsylvania 4
1
1
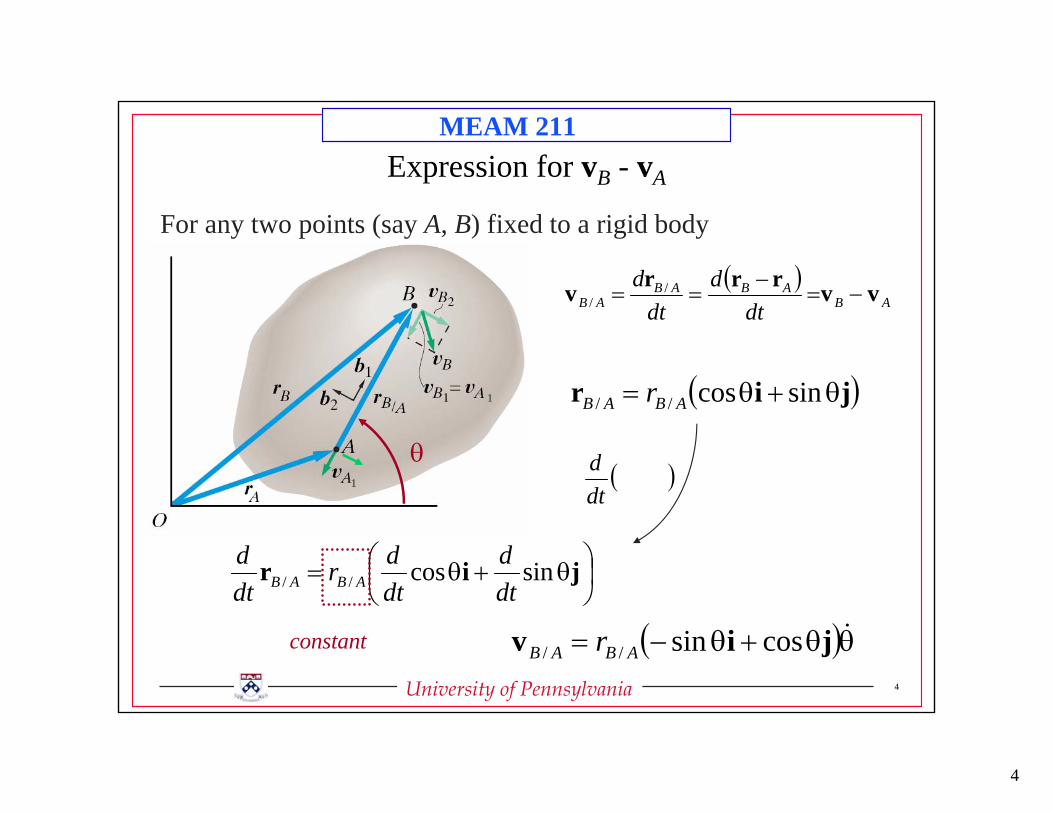
Expression for vB - vA
For any two points (say A, B) fixed to a rigid body
( )AB
ABABAB dt
ddt
d vvrrrv −=−
== //
θ
( )jir θ+θ= sincos// ABAB r
( )dtd
⎟⎠⎞
⎜⎝⎛ θ+θ= jir sincos// dt
ddtdr
dtd
ABAB
constant ( )θθ+θ−= &jiv cossin// ABAB r
5
MEAM 211
University of Pennsylvania 5
1
1
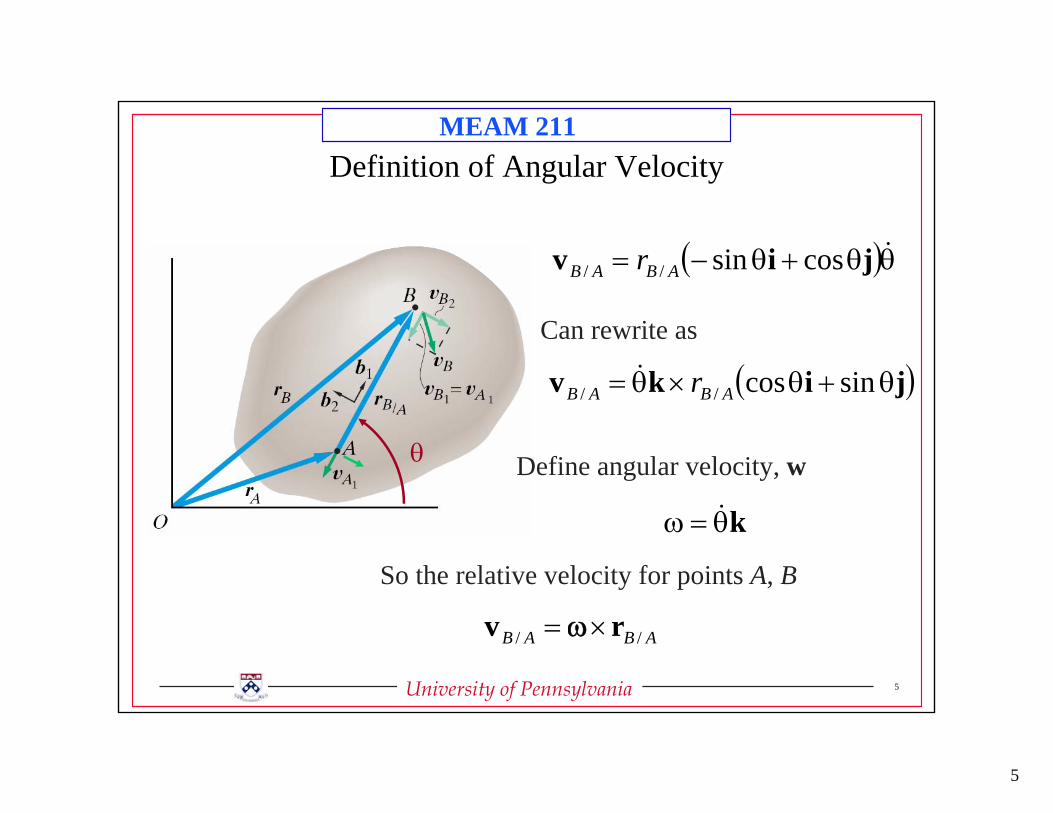
Definition of Angular Velocity
θ
( )θθ+θ−= &jiv cossin// ABAB r
( )jikv θ+θ×θ= sincos// ABAB r&
Can rewrite as
kθ=ω &
Define angular velocity, w
ABAB // rv ×= ω
So the relative velocity for points A, B
6
MEAM 211
University of Pennsylvania 6
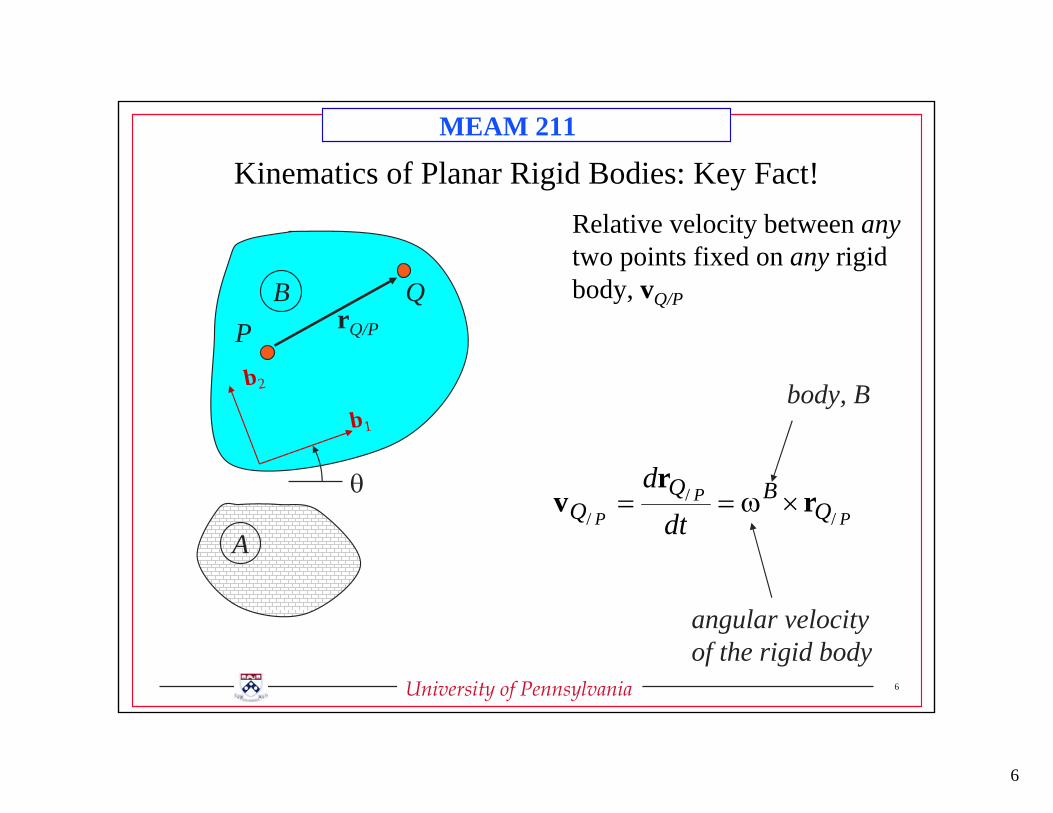
Kinematics of Planar Rigid Bodies: Key Fact!Relative velocity between anytwo points fixed on any rigid body, vQ/P
A
BP
QrQ/P
b1
b2
θP
PP Q
BQQ dt
d/
//
rr
v ×ω==
body, B
angular velocity of the rigid body
7
MEAM 211
University of Pennsylvania 7
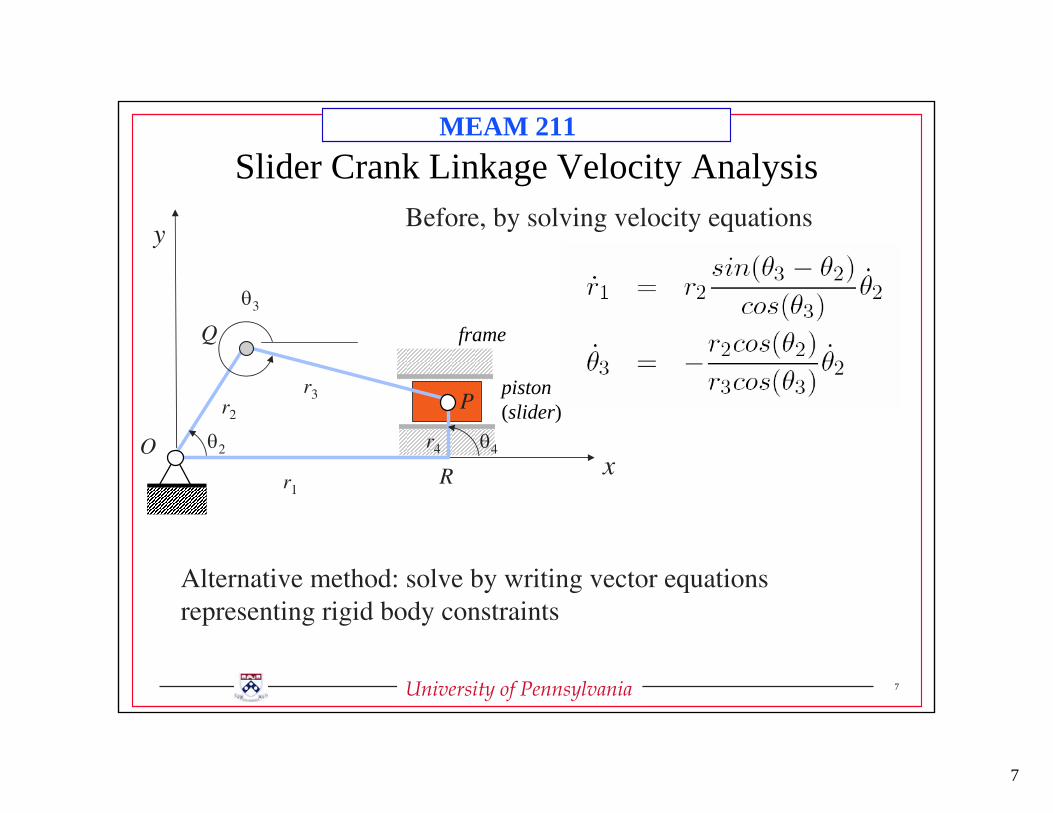
piston (slider)
frame
θ2
x
y
θ3
r1
r2
r3
r4 θ4O
P
Q
R
Slider Crank Linkage Velocity AnalysisBefore, by solving velocity equations
Alternative method: solve by writing vector equations representing rigid body constraints
8
MEAM 211
University of Pennsylvania 8
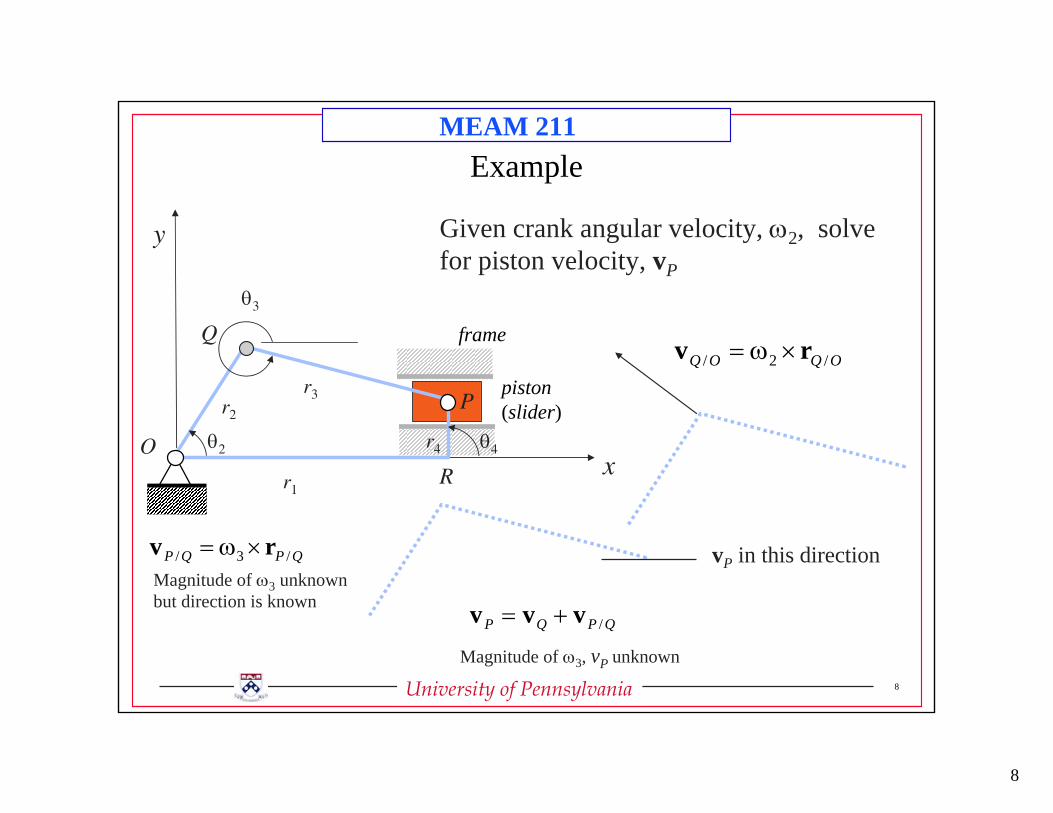
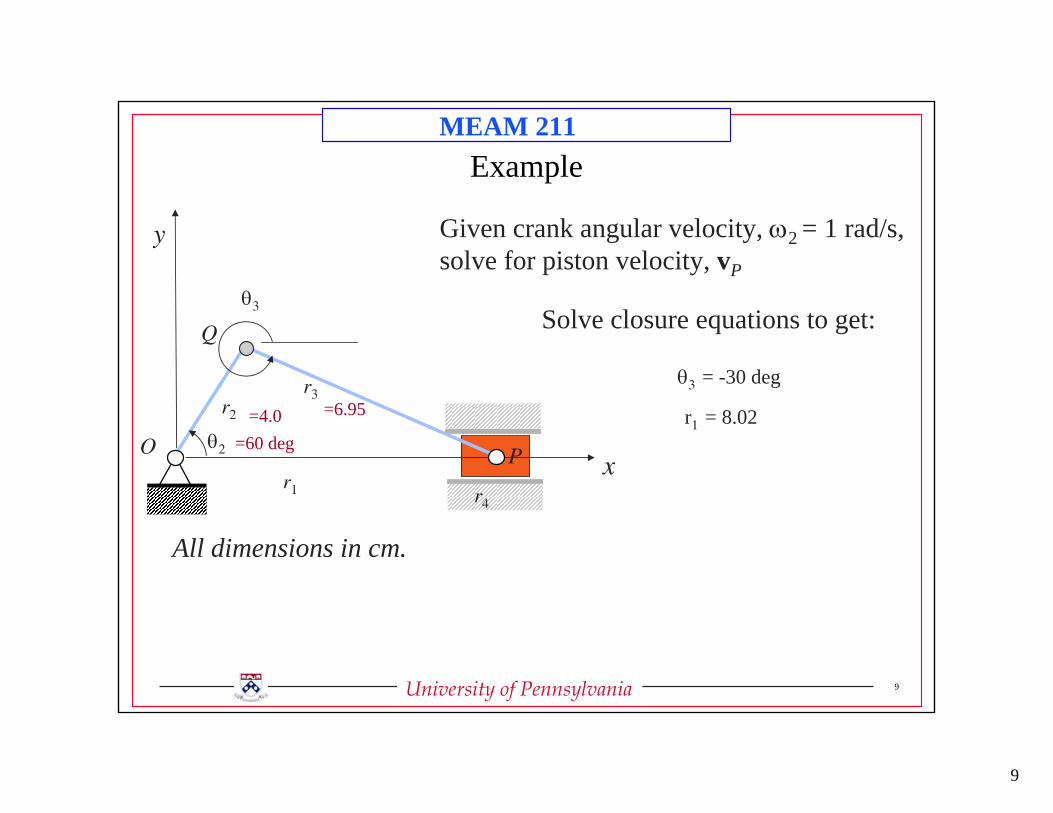
Example
piston (slider)
frame
θ2
x
y
θ3
r1
r2
r3
r4 θ4O
P
Q
R
OQOQ /2/ rv ×ω=
Given crank angular velocity, ω2, solve for piston velocity, vP
vP in this directionQPQP /3/ rv ×ω=
QPQP /vvv +=Magnitude of ω3 unknownbut direction is known
Magnitude of ω3, vP unknown
9
MEAM 211
University of Pennsylvania 9
Example
θ2
x
y
θ3
r1
r2
r3
r4
O P
Q
Given crank angular velocity, ω2 = 1 rad/s, solve for piston velocity, vP
=4.0 =6.95
=60 deg
θ3 = -30 deg
Solve closure equations to get:
r1 = 8.02
All dimensions in cm.
10
MEAM 211
University of Pennsylvania 10
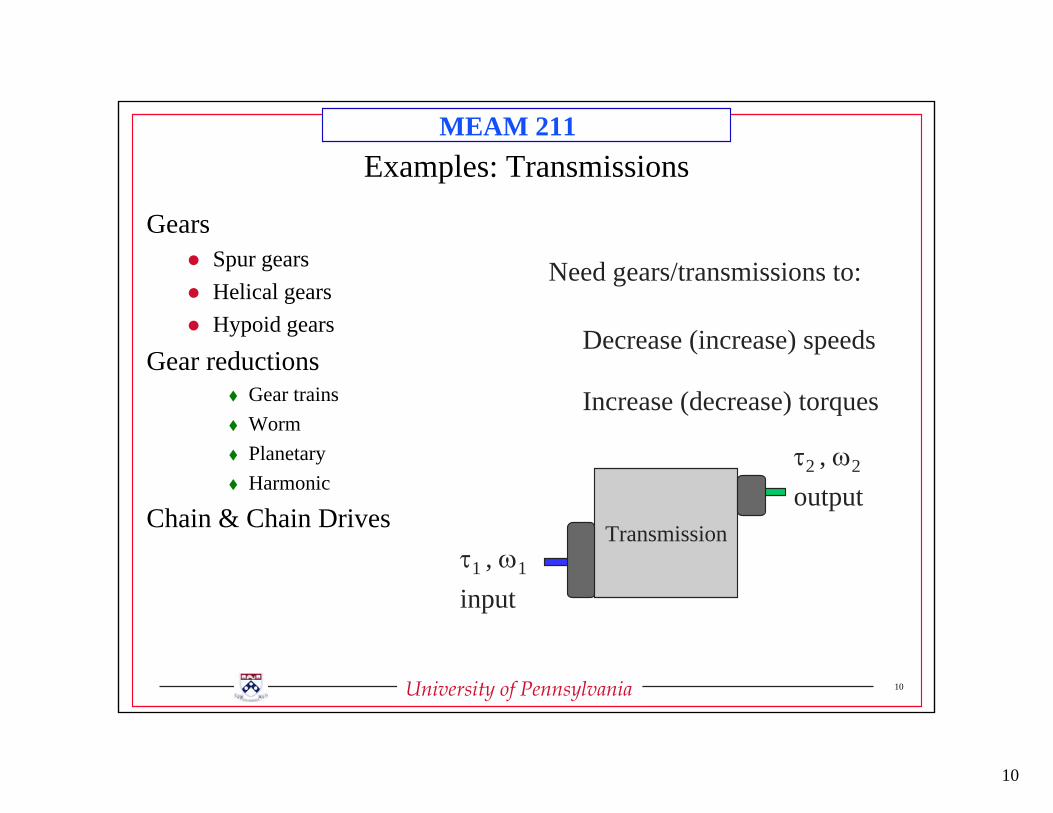
Examples: Transmissions
Gears Spur gearsHelical gearsHypoid gears
Gear reductionsGear trainsWormPlanetaryHarmonic
Chain & Chain Drives
Decrease (increase) speeds
Need gears/transmissions to:
Increase (decrease) torques
Transmissionτ1 , ω1
τ2 , ω2
input
output

11
MEAM 211
University of Pennsylvania 11
Spur and Helical Gears
Spur gear Loud: Each time a gear tooth engages a tooth on the other gear, the teeth collide, and this impact makes a noise Wear and tear
Helical gearsContact starts with point contact to line contact
Crossed helical gearsShaft angles need not be parallel
12
MEAM 211
University of Pennsylvania 12
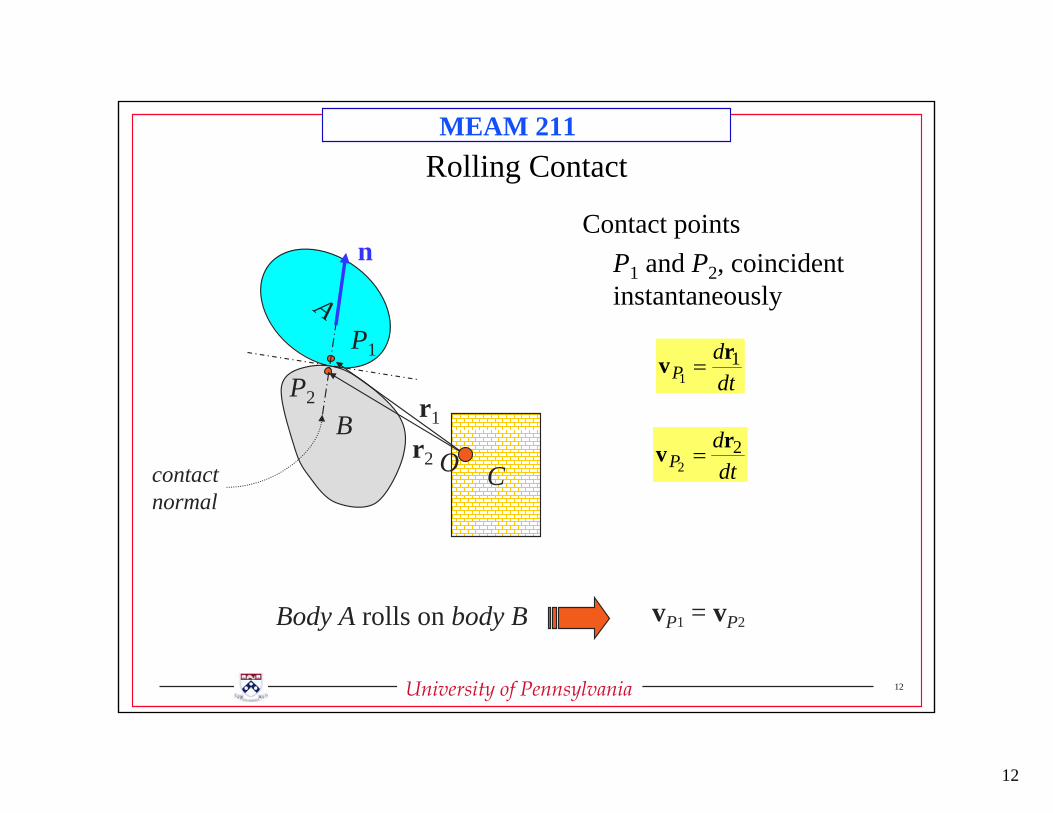
Rolling Contact
Contact pointsP1 and P2, coincident instantaneously
C
A
B
P1
P2
n
contactnormal
O
r1
r2
dtd
P1
1
rv =
dtd
P2
2
rv =
Body A rolls on body B vP1 = vP2
13
MEAM 211
University of Pennsylvania 13
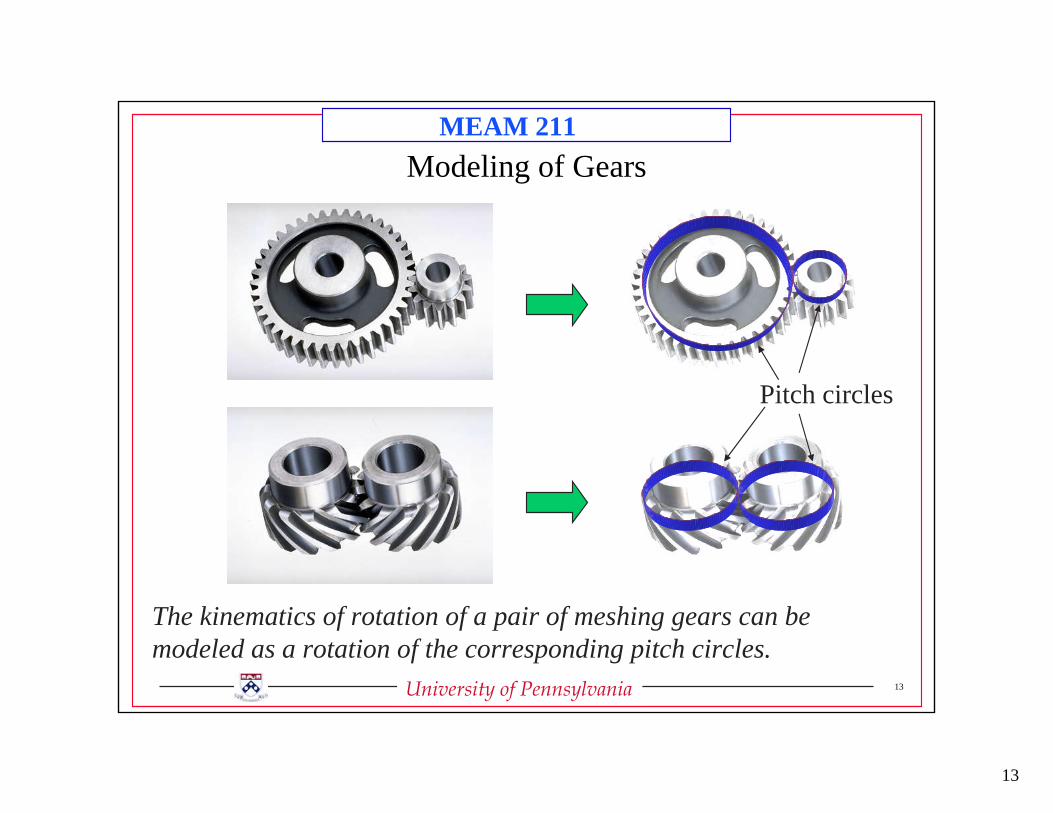
Modeling of Gears
Pitch circles
The kinematics of rotation of a pair of meshing gears can be modeled as a rotation of the corresponding pitch circles.
14
MEAM 211
University of Pennsylvania 14
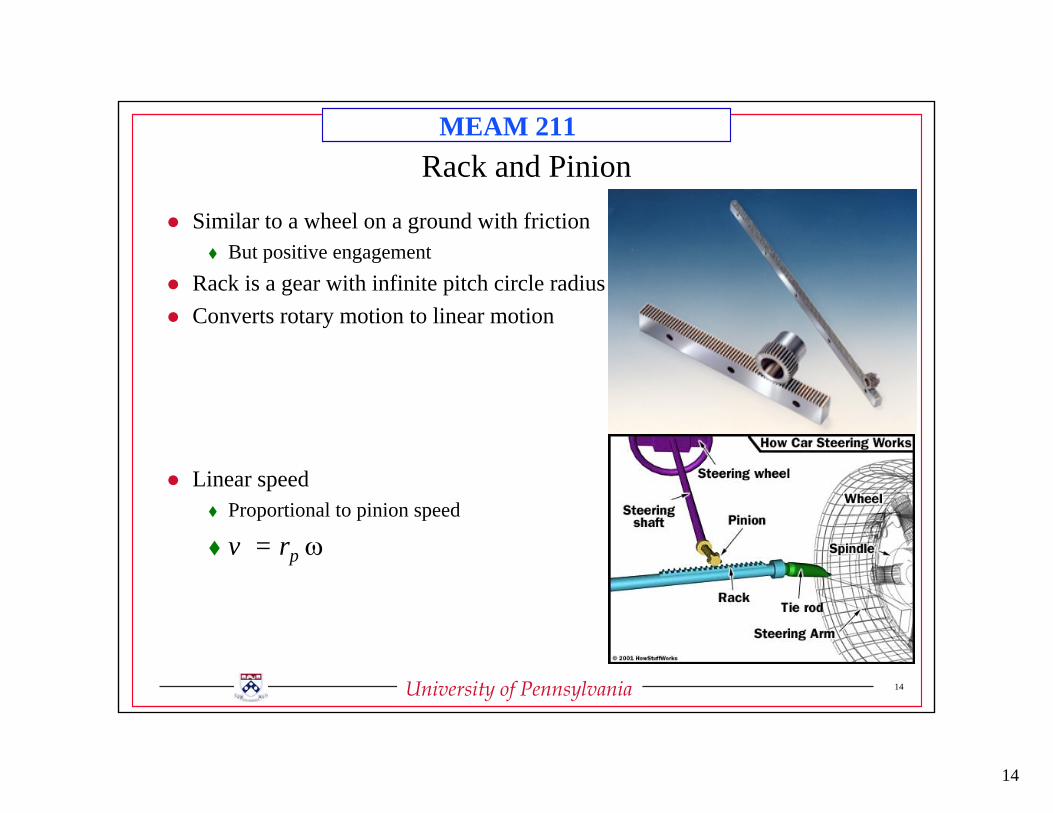
Rack and PinionSimilar to a wheel on a ground with friction
But positive engagementRack is a gear with infinite pitch circle radiusConverts rotary motion to linear motion
Linear speed Proportional to pinion speed
v = rp ω
15
MEAM 211
University of Pennsylvania 15
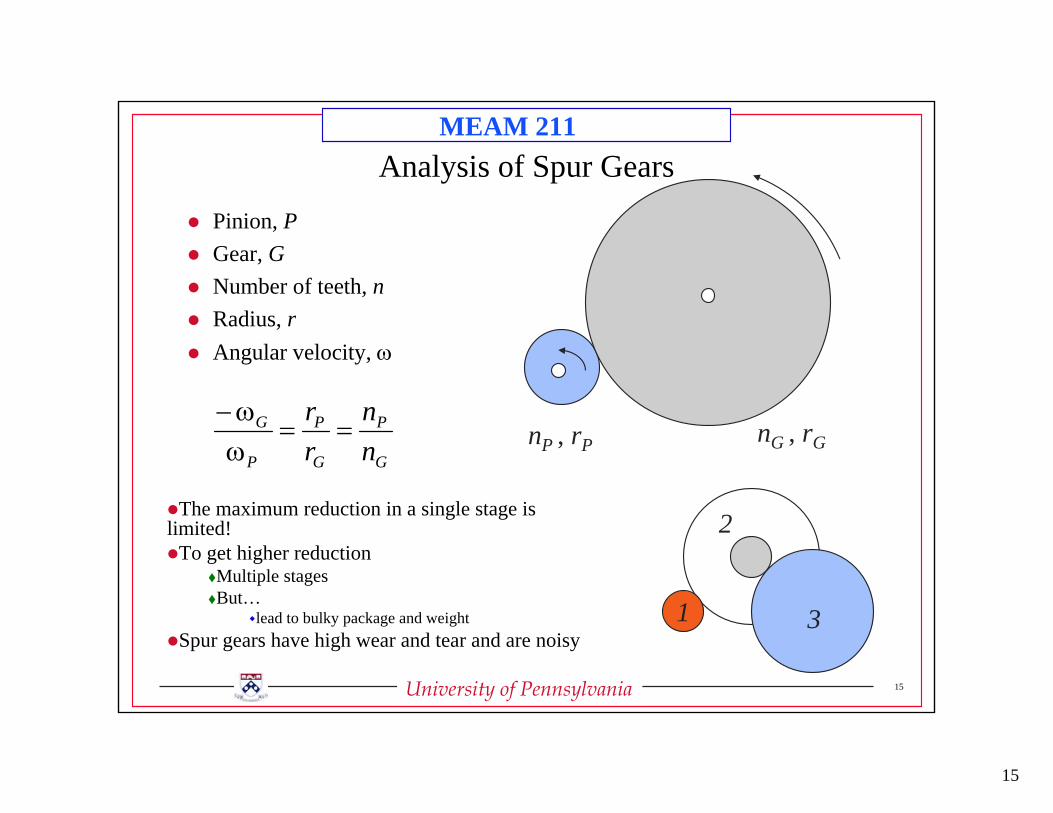
Analysis of Spur GearsPinion, PGear, GNumber of teeth, nRadius, rAngular velocity, ω
nP , rP nG , rGG
P
G
P
P
G
nn
rr
==ωω−
1
2
3
The maximum reduction in a single stage is limited!
To get higher reductionMultiple stagesBut…
lead to bulky package and weightSpur gears have high wear and tear and are noisy
16
MEAM 211
University of Pennsylvania 16
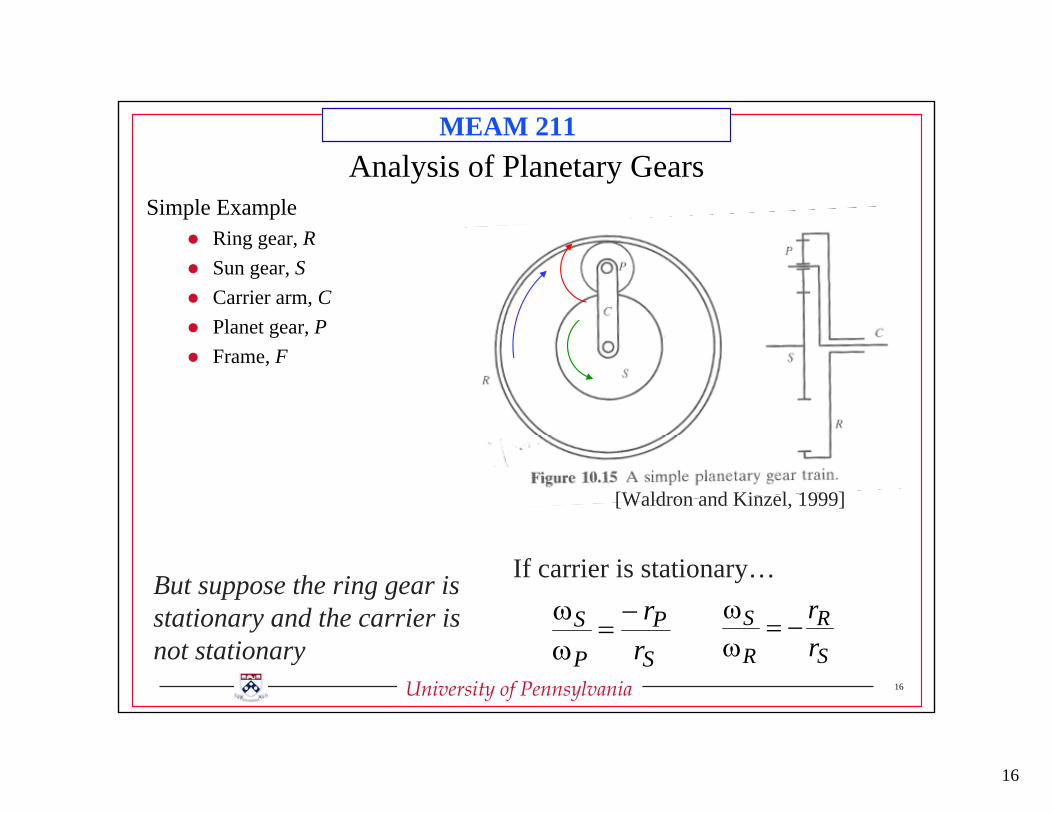
Analysis of Planetary GearsSimple Example
Ring gear, RSun gear, SCarrier arm, CPlanet gear, PFrame, F
[Waldron and Kinzel, 1999]
If carrier is stationary…
S
P
P
Srr−
=ωω
S
R
R
Srr
−=ωω
But suppose the ring gear is stationary and the carrier is not stationary
17
MEAM 211
University of Pennsylvania 17
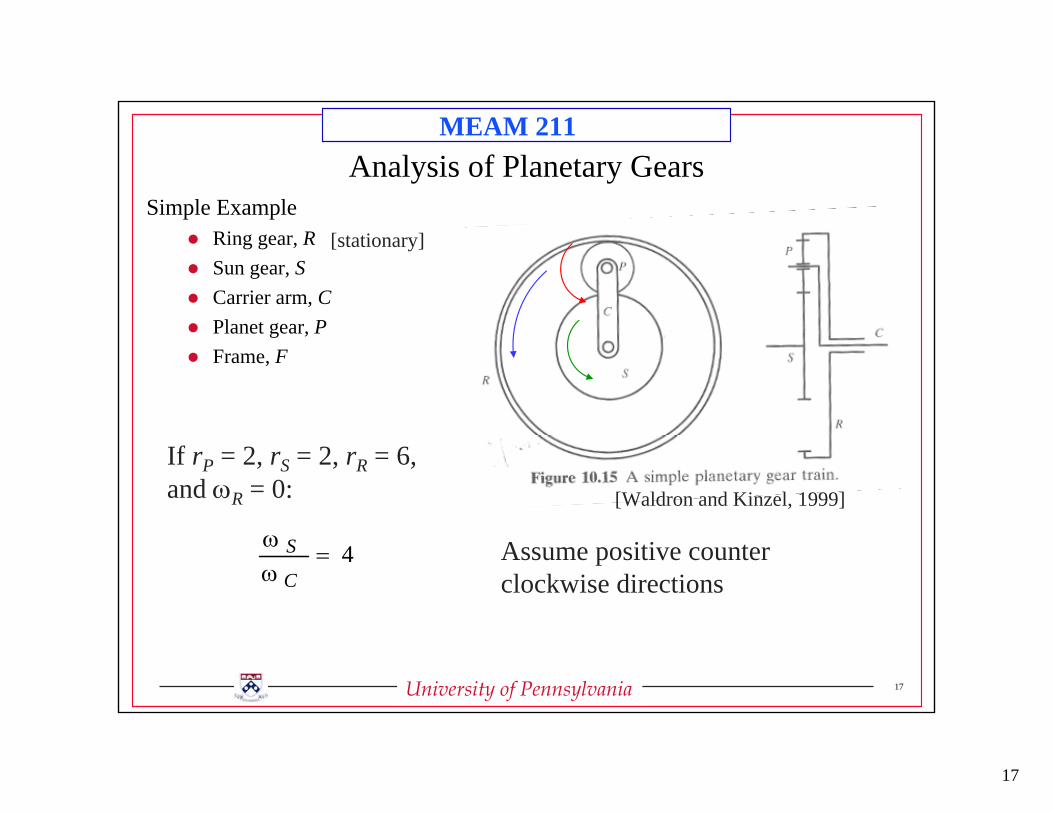
Analysis of Planetary GearsSimple Example
Ring gear, RSun gear, SCarrier arm, CPlanet gear, PFrame, F
[Waldron and Kinzel, 1999]
If rP = 2, rS = 2, rR = 6,and ωR = 0:
4=ωω
C
S Assume positive counter clockwise directions
[stationary]
18
MEAM 211
University of Pennsylvania 18
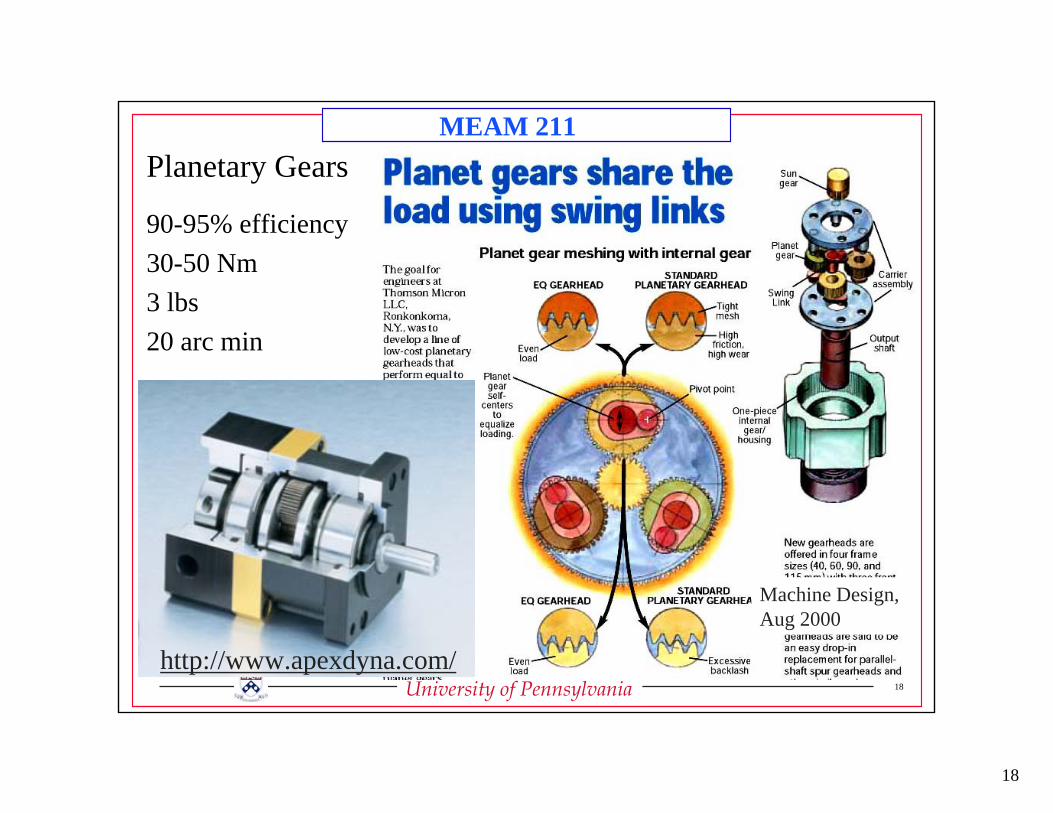
Planetary Gears
90-95% efficiency30-50 Nm3 lbs20 arc min
Machine Design, Aug 2000
http://www.apexdyna.com/





























