Embed Size (px)
DESCRIPTION
pengpros
Citation preview
LABORATORIUM PENGENDALIAN PROSES
SEMESTER GENAP TAHUN AJARAN 2014/2015
MODUL : Pengendalian Aliran
PEMBIMBING : Harita N. Chamidy, LRSC.
Praktikum : 15 April 2015
Penyerahan (Laporan) : 18 Juni 2015
Oleh :
Kelompok : 7
Nama : 1. Annisa Novita N NIM. 131424005
2. Nadhira Rifarni NIM.131424016
Kelas : 2A - TKPB
PROGRAM STUDI DIPLOMA IV TEKNIK KIMIA PRODUKSI BERSIH
JURUSAN TEKNIK KIMIA
POLITEKNIK NEGERI BANDUNG
2015
BAB I
PENDAHULUAN
1.1 Latar Belakang
Satu besaran penting pada proses yang melibatkan cairan adalah laju aliran. Pengendalian
aliran menjadi factor sangat penting pada proses.
1). Aliran cairan ke alat berikutnya diharapkan pada nilai konstan
2). Banyak fungsi unit proses berjalan baik jika bekerja pada aliran tetap.
1.2 Tujuan
Praktikum ini memberi kompetensi dasar pada mahasiswa yaitu kemampuan untuk dapat
mengendalikan system aliran.
Mempelajari pengaruh nilai parameter pengendali pada respons aliran.
BAB II
TINJAUAN PUSTAKA
2.1 Prinsip Pengendalian
Proses operasi dalam industri kimia bertujuan untuk mengoperasikan rangkaian peralatan
sehingga proses dapat berjalan sesuai dengan satuan operasi yang berlaku. Untuk mencapai hal
tersebut maka diperlukan pengendalian. Hal yang perlu diperhatikan dalam proses operasi teknik
kimia seperti suhu (T), tekanan (P), laju alir (F) tinggi permukaan cairan (L), komposisi, pH, dan
lain sebagainya. Peranan pengendalian proses pada dasarnya adalah mencapai tujuan proses agar
berjalan sesuai dengan apa yang diinginkan.
Ketinggian suatu cairan merupakan salah satu hal yang harus dikendalikan dalam suatu
industry kimia. Apabila ketinggian cairan tidak dikendalikan maka proses dalam industry akan
terganggu. Jika ketinggian cairan melebihi ketinggian yang diinginkan maka akan terjadi
overflow atau cairan akan meluap sehingga mengganggu atau daoat merusak alat-alat lain dan
jika ketinggian cairan kurang dari ketinggian yang diinginkan maka proses tidak akan bekerja.
Oleh karena itu ketinggian suatu cairan harus dikendalikan dalam suatu industry.
Untuk pelaksanan langkah-langkah pengendalian proses tersebut diperlukan
instrumentasi sebagai berikut:
1. Unit proses.
2. Unit pengukuran.
Bagian ini bertugas mengubah nilai variable proses yang berupa besaran fisik atau kimia
menjadi sinyal standar (sinyal pneumatic dan sinyal listrik).
Unit pengukuran ini terdiri atas:
a) Sensor: elemen perasa (sensing element) yang langsung “merasakan” variable
proses. Sensor merupakan bagian paling ujung dari sistem/unit pengukuran dalam sistem
pengendalian. Contoh dari elemen perasa yang banyak dipakai adalah thermocouple,
orificemeter, venturimeter, sensor elektromagnetik, dll.
b) Transmitter atau tranducer: bagian yang menghitung variable proses dan mengubah
sinyal dari sensor menjadi sinyal standar atau menghasilkan sinyal proporsional, seperti:
DC voltage 0-5 volt
DC current 4-20 mA
Pressure 3-15 psi
Unit pengendali atau controller atau regulator yang bertugas membandingkan,
mengevaluasi dan mengirimkan sinyal ke unit kendali akhir. Hasil evalusi berupa sinyal kendali
yang dikirim ke unit kendali akhir. Sinyal kendali berupa sinyal standar yang serupa dengan
sinyal pengukuran.
Pada controller bisaanya dilengkapi dengan control unit yang berfungsi untuk
menentukan besarnya koreksi yang diperlukan. Unit ini mengubah error menjadi manipulated
variable berupa sinyal. Sinyal ini kemudian dikirim ke unit pengendali akhir (final control
element).
Unit kendali akhir yang bertugas menerjemahkan sinyal kendali menjadi aksi atau
tindakan koreksi melalui pengaturan variable termanipulasi. Unit kendali akhir ini terdiri atas:
a) Actuator atau servo motor: elemen power atau penggerak elemen kendali akhir.
Elemen ini menerima sinyal yang dihasilkan oleh controller dan mengubahnya ke dalam
action proporsional ke sinyal penerima.
b) Elemen kendali akhir atau final control element: bagian akhir dari sistem pengendalian yang
berfungsi untuk mengubah measurement variable dengan cara memanipulasi besarnya
manipulated variable yang diperintahkan oleh controller. Contoh paling umum dari elemen
kendali akhir adalah control valve (katup kendali). bisaanya digunakan untuk mengendalikan
aliran air pada ketinggian tertentu dengan tekanan tertentu pada suatu tabung atau pipa.
2.2 Pengendalian Laju Alir
Dalam praktikum ini sebagai sensor laju alir adalah jenis turbin. Putaran turbin
berbanding lurus dengan laju alir. Sinyal listrik sensor turbin berupa gelombang balok. Oleh
converter, gelombang balok diubah menjadi sinyal tegangan 1-5 (0-100%). Sinyal ini dikirim ke
pengendali (computer). Aksi pengendali berjenis berkebalikan (reverse acting). Artinya jika laju
ali bertambah besar, sinyal kendali berkurang dan katup kendali lebih menutup untuk
mengurangi laju alir.
Sinyal kendali dari pengendali (computer) berupa sinyal tegangan 1-5 V, yang
selanjutnya diubah menjadi sinyal arus 4-20 mA, oleh converter sinyal arus diubah menjadi
sinyal pneumatic 0,2-1 bar (3-15 psi). control valve (unit kendali akhir) adalah jenis pneumatic
yang mendapat sinyal pneumatic tersebut.
Dalam pengendalian aliran ini sebagai PV adalah laju alir, MV adalah aliran masuk, SP
adalah laju alir yang diinginkan, gangguan adalah laju lalir yang keluar system. Pengendalian
laju alir memiliki sifat cepat dan banyak noise khususnya untuk aliran turbulen.
Karakteristik dinamik lingkar pengendalian laju alir didominasi oleh dinamika elemen
kendali akhir. Juga akibat gesekan stem dapat menimbulkan hysteresis. Factor linileritas
pengendalian laju alir ditentukan oleh karakteristik katup kendali, tipe instrument ukur laju alir
yang dipakai dan penyempitan dalam pipa.
BAB III
METODOLOGI PERCOBAAN
3.1 Alat dan Bahan
3.1.1 Alat dan Bahan yang digunakan untuk percobaan pengendalian Level adalah sebagai
berikut :
1. Seperangkat sistem pengendalian Aliran
2. Komputer
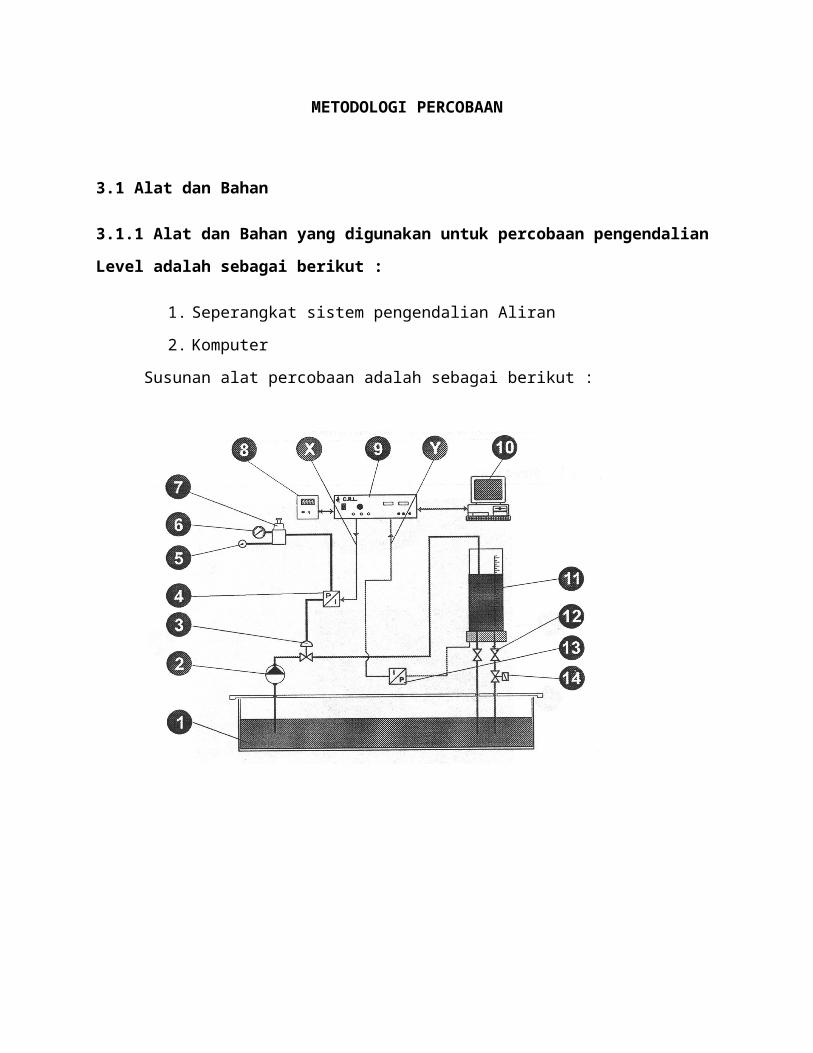
Susunan alat percobaan adalah sebagai berikut :
Keterangan :
1. Water drainage tank
2. Centrifugal pump
3. Control valve
4. I / P transduser
5. Udara instrument
6. Manometer
7. Pressure regulator (manual)
8. Pengendali luar
9. Panel Kendali
10. Personal computer
11. Tangki Penampung
12. Katup Buang manual
13. Sensor dan Transmitter level
14. Katup Solenoida
X. Actuating signal
Y. Controlled quantity signal
3.2 Percobaan
3.2.1 Persiapan
1) Pastikan penampung air telah terisi paling sedikit tiga perempat penuh
2) Sistem peralatan aliran telah terhubung secara benar dengan komputer
3) Pastikan komputer bekerja normal
3.3.3 Pengoprasian perangkat keras
1) Pastikan udara instrumen telah mengalir pada tekanan masuk 140 kPa (1,4 bar) atau
maksimum 200 kPa (2 bar). Jika perlu atur regulator tekanan udara instrumen agar
memenuhi tekanan tersebut.
2) Nyalakan peralatan CRL dengan menekan tombol daya
3) Ubah saklar pemilih ke posisi PC. Pompa akan hidup dan mengalirkan air ke dalam
tangki
3.3.4 Pengoprasian perangkat lunak
1) Nyalakan komputer/laptop dan jalankan program level control
2) Pastikan posisi tombol AUTO/MANUAL pada posisi MANUAL
3) Pastikan posisi tombol REVERSE/DIRECT pada posisi REVERSE
4) Tekan tombol RUN (berupa panah) sehingga pengendalian mulai berjalan.
5) Atur manipulated variable yang mempresentasikan bukaan katup kendali dengan
menggeser horizontal scroll ke kanan hingga 100%
6) Atur katup buang sehingga aliran yang ditunjukan rotameter (11) dan tampilan layar
computer sebesar 100 L/jam. Bila nilainya tidak sama, gunkan tampilan di layar
computer.
3.3.5 Pengendalian Automatik
1) Geser vertical scroll SP (set point) ke posisi 50 L/h atau dengan cara mengetikan nilai
50 kemudian tekan ENTER
2) Pastikan parameter pengendali dengan nilai PB=100, waktu integral=1, dan waktu
derivatif=0
3) Ubah posisi setpoint AUTO/MANUAL ke posisi AUTO
4) Amati aliran air (warna hijau) terhadap nilai setpoint (warna merah). Aliran akan
bergerak kea rah setpoint sehingga konstan disitu.
3.3.5 Pengaruh Parameter Pengendali Tanpa Tangki Peredam
Pengendali Proporsional (P)
1) Pastikan SP=50 L/h
2) Pastikan nilai PB=100% dan waktu derivative, Td=0
3) Ubah waktu integral (Ti) ke nilai yang sangat besar (missal 100000) dengan demikian
maka pengaruh integral hamper tidak ada.
4) Ubah setpoint (SP) ke 60 L/h dengan mengetikkan angka 60 dan diikuti menekan
ENTER
5) Amati nilai aliran (PV), apakah bias mengikuti SP. Perhatikan juga adakah osilasi
nilai aliran (PV).
6) Ubah setpoint (SP) kembali ke 50 L/h, dan tunggu sampai nilai PV stabil dan konstan.
7) Ubah gain PB ke 20,50,150, dan 200. Setiap perubahan lakukan langkah (3)-(5).
Amati nilai aliran (PV).
8) Pilih nilai proporsional band (PB) yang menghasilkan pengendalian cepat, tepat, dan
stabil.
Pengendali Proporsional-Integral (PI)
1) Gunakan nilai PB terbaik dari pengendalian proporsional di atas
2) Pastikan SP = 50 L/h dan tunggu hingga nilai PV konstan.
3) Ubah waktu integral bernilai 60 detik (1 menit) dan tunggu hingga nilai PV konstan
4) Ubah setpoint (SP) ke 60 L/h
5) Amati nilai aliran (PV), apakah bias mengikuti SP. Perhatikan juga adakah osilasi
nilai PV
6) Ubah setpoint (SP) kembali ke 50%, dan tunggu sampai nilai PV stabil dan konstan.
7) Ubah waktu integral ke nilai 30,10,5,2,1 dan 0,5. Setiap perubahan lakukan langkah
(4)-(6). Amati nilai PV
8) Pilih nilai waktu integral yang menghasilkan pengendalian cepat, tepat dan stabil.
Pengendali Proporsional-Integral-Derivatif (PID)
1) Gunakan nilai PB dan Ti terbaik dari pengendalian PI sebelumnya
2) Pastikan SP =50 L/h dan tunggu hingga nilaiPV konstan
3) Ubah waktu derivative menjadi 1 detik
4) Ubah setpoint (SP) ke 60 L/h
5) Amati nilai aliran (PV), apakah bias mengikuti SP. Perhatikan juga adakah osilasi
nilai PV
6) Ubah setpoint (SP) kembali ke 50 L/h dan tunggu sammpai nilai PV stabil dan
konstan
7) Ubah waktu derivative ke nilai 2,5,10,20 dan 30. Setiap perubahan lakukan langkah
(4)-(6). Amati nilai PV
8) Pilih nilai waktu derivative yang memnghasilkan pengendalian cepat , tepat dan
stabil.
3.3.6 Penyelesaian Percobaan
1) Jika sudah seeai, tekan tombol OPERASI STOP
2) Maka akan muncul tampilan untumengisi nama file data, isikan dengan ekstensi XLS
(misalnya “kelompok-2.xis’) kemudan telkan OK
3) Matikan CRLF dengan menekan tombol daya ke posiis OFF
4) Buka katup buang tangki sehingga kosng
5) Bersihkan tempat kerja sehingga tidak ada sampah, kertas atau barang lain berserakan
di sekitar peralatan.
4.Keselamatan Kerja
Potensi bahaya yang perlu diwaspadai
Hati-hati dengan listrik bolak-balik 220 V dari PLN
Pada saat bekerja, disekitar meja tidak terdapar pemasangan listrik yang
berbahaya
Sselidiki dengan test-pen atau peralatan lain, apakah semua peralatan telah
ditanahkan dengan baik. Hal ini untuk menghindari sengatan listrik akibat efek
kapasitif atau induktif
Berhati-hatilah dengan perhiasan logam seperti cincin, jam tangan, mistar logam,
dan lain-lain alat yang mampu membuat hubungan singkat.
Usahakan agar tidak seorangpun dapat tersandung oleh kawat-kawat atau tidak
sengaja merobohkan peralatan
Bila menghubungkan peralatan, maka hubungkan dengan jaringan listrik
dilakukan paling akhir
Jika terjadi sengatan listrik dan korban terbelit kawat, jangan panik, cepat
putuskan sambungan listrik, baru menolong korban.
BAB IV
HASIL PERCOBAAN DAN PEMBAHASAN
4.1 Data Pengamatan
4.1.1 PENGENDALI PROPORSIONAL (P)
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96 101
106
111
116
121
126
131
136
141
146
1510
20
40
60
80
100
120
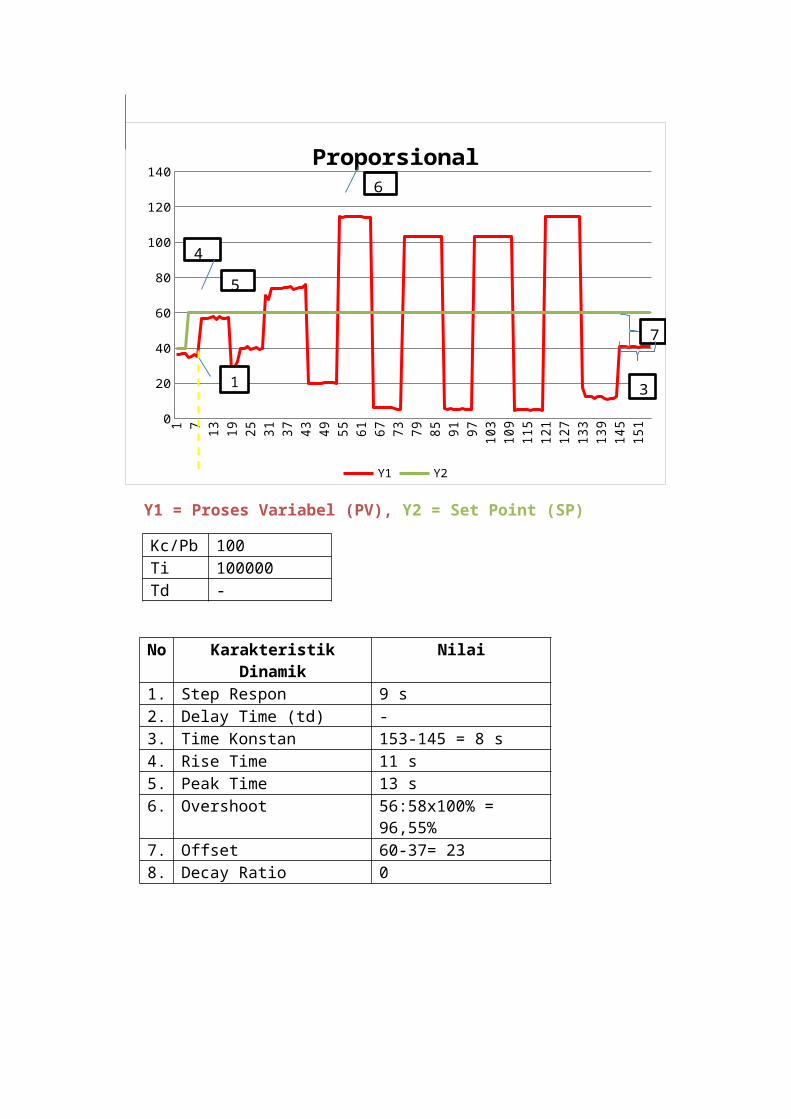
140Proporsional
Y1 Y2
3
4
5
6
7
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 100Ti 100000Td -
No Karakteristik Dinamik Nilai1. Step Respon 9 s2. Delay Time (td) -3. Time Konstan 153-145 = 8 s4. Rise Time 11 s5. Peak Time 13 s6. Overshoot 56:58x100% = 96,55%7. Offset 60-37= 238. Decay Ratio 0
1
1 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103
109
115
121
127
133
139
145
151
157
163
169
175
181
0
20
40
60
80
100
120
Proporsional
y1y2
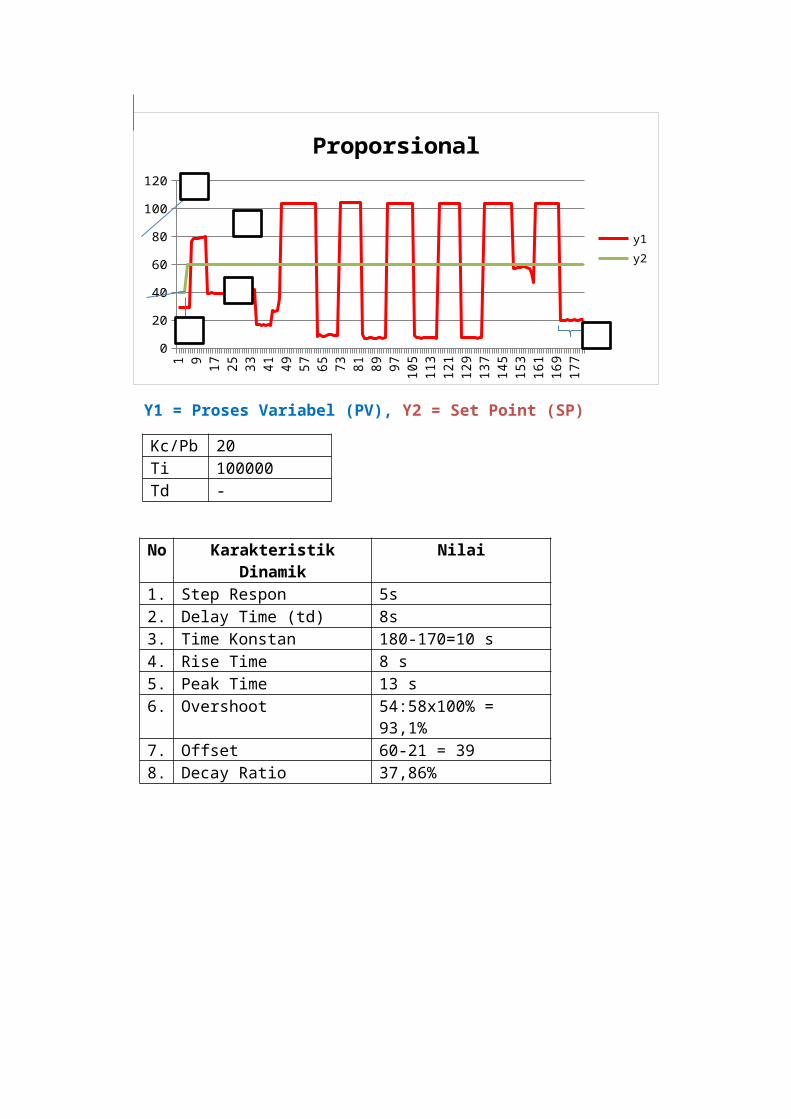
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 20Ti 100000Td -
No Karakteristik Dinamik Nilai1. Step Respon 5s2. Delay Time (td) 8s3. Time Konstan 180-170=10 s4. Rise Time 8 s5. Peak Time 13 s6. Overshoot 54:58x100% = 93,1%7. Offset 60-21 = 398. Decay Ratio 37,86%
1
2
3
4
5
1 10 19 28 37 46 55 64 73 82 91 100
109
118
127
136
145
154
163
172
181
190
199
208
217
226
0
20
40
60
80
100
120
Proporsional
Y1Y2
1
23
4
5
7
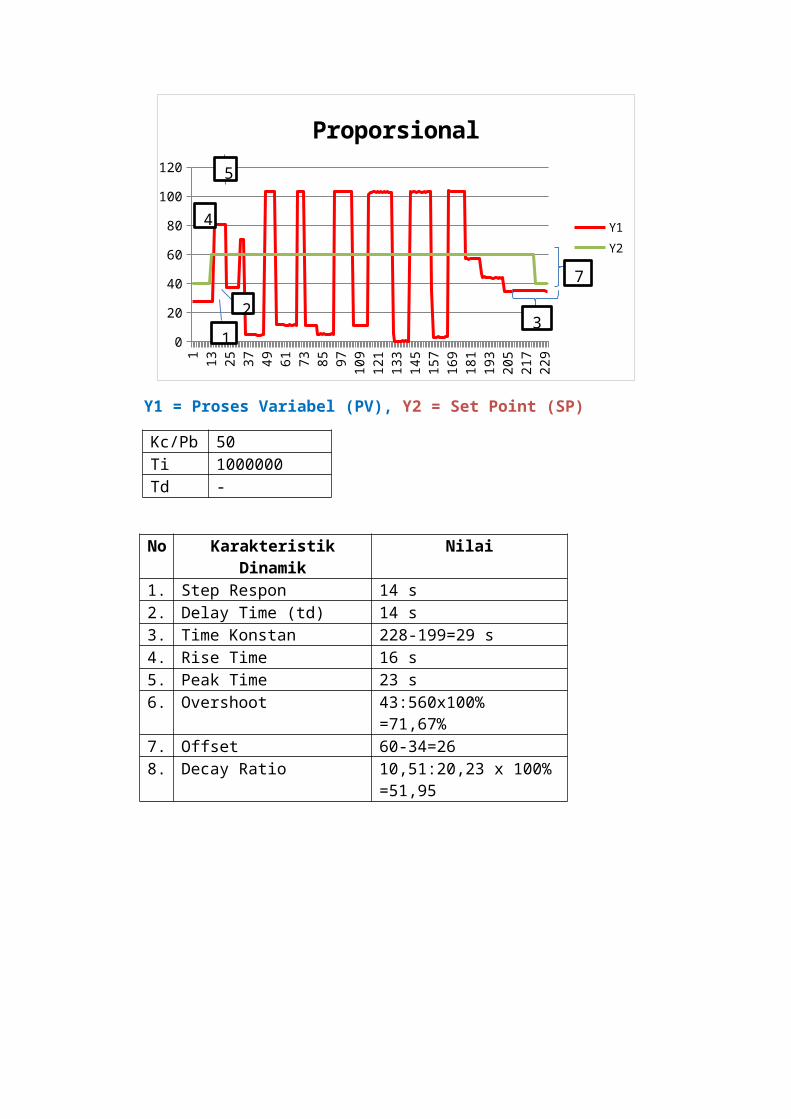
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 50Ti 1000000Td -
No Karakteristik Dinamik Nilai1. Step Respon 14 s2. Delay Time (td) 14 s3. Time Konstan 228-199=29 s4. Rise Time 16 s5. Peak Time 23 s6. Overshoot 43:560x100% =71,67%7. Offset 60-34=268. Decay Ratio 10,51:20,23 x 100% =51,95
1 13 25 37 49 61 73 85 97 109 121 133 145 157 169 181 193 205 217 229 241 253 2650
20
40
60
80
100
120
Proporsional
Y1 Y2
1
2
4 5
7
3
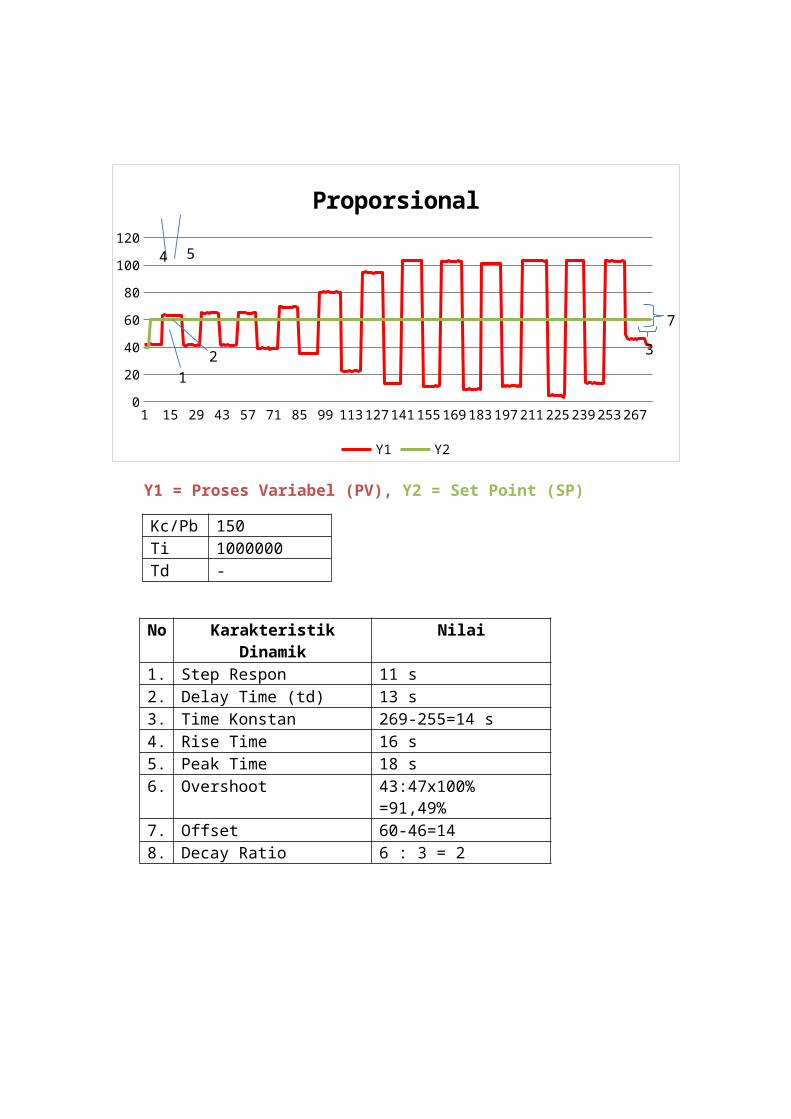
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 150Ti 1000000Td -
No Karakteristik Dinamik Nilai1. Step Respon 11 s2. Delay Time (td) 13 s3. Time Konstan 269-255=14 s4. Rise Time 16 s5. Peak Time 18 s6. Overshoot 43:47x100% =91,49%7. Offset 60-46=148. Decay Ratio 6 : 3 = 2
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99 106 113 120 127 134 141 1480
10
20
30
40
50
60
70
Proporsional
y1 y2
1
7
3
2
4 5
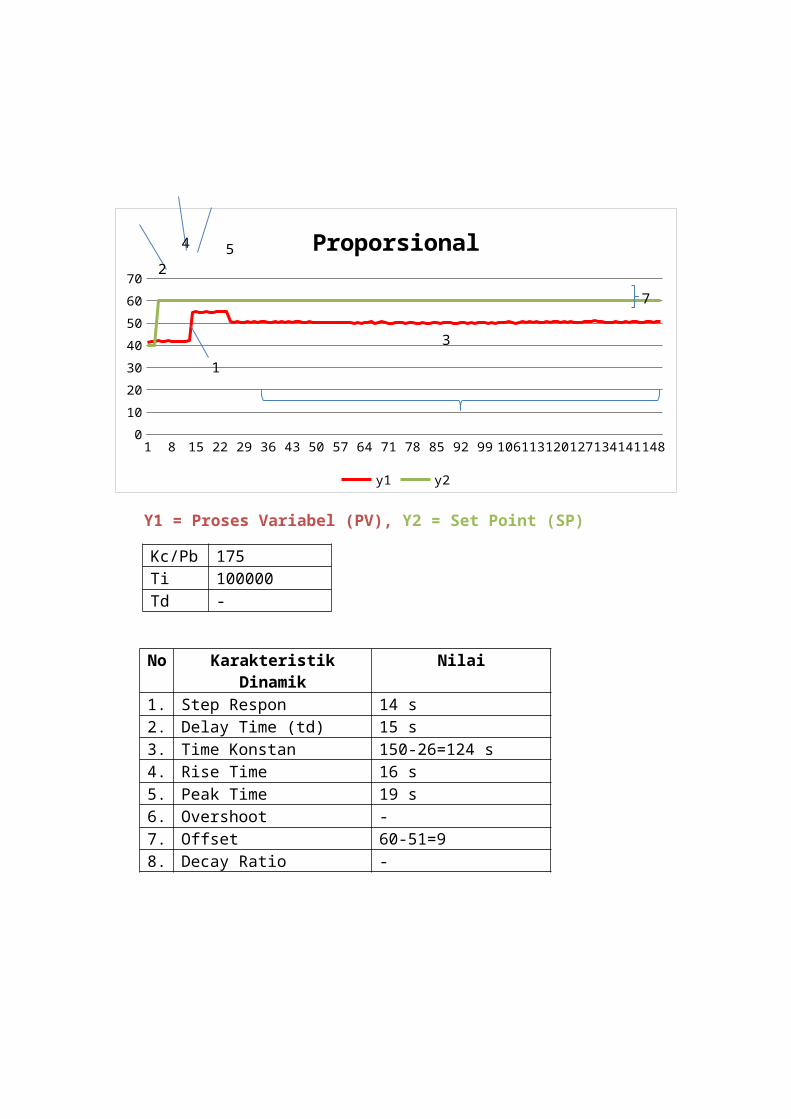
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 100000Td -
No Karakteristik Dinamik Nilai1. Step Respon 14 s2. Delay Time (td) 15 s3. Time Konstan 150-26=124 s4. Rise Time 16 s5. Peak Time 19 s6. Overshoot -7. Offset 60-51=98. Decay Ratio -
PENGENDALI PROPORSIONAL-INTEGRAL (PI)
1 10 19 28 37 46 55 64 73 82 91 100
109
118
127
136
145
154
163
172
181
190
199
208
217
226
235
244
0
10
20
30
40
50
60
70
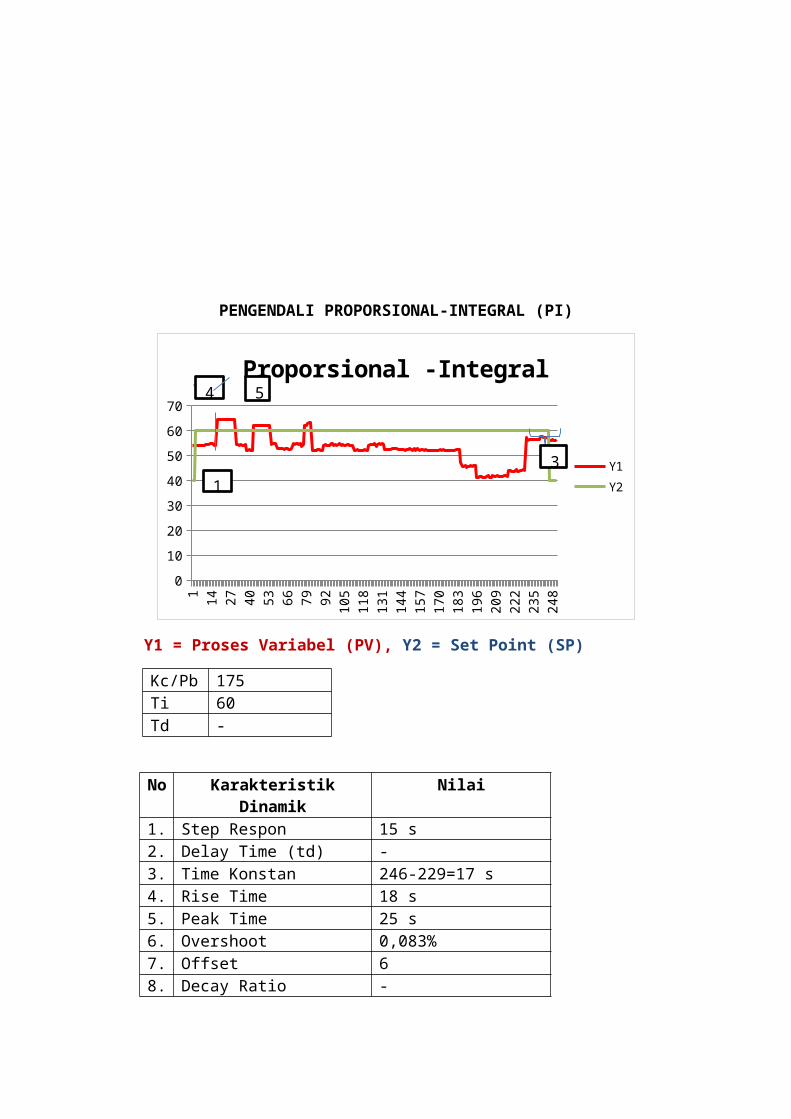
Proporsional -Integral
Y1Y21
3
4 5
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 60Td -
No Karakteristik Dinamik Nilai1. Step Respon 15 s2. Delay Time (td) -3. Time Konstan 246-229=17 s4. Rise Time 18 s5. Peak Time 25 s6. Overshoot 0,083%7. Offset 68. Decay Ratio -
1 10 19 28 37 46 55 64 73 82 91 100
109
118
127
136
145
154
163
172
181
190
199
208
217
226
235
0
10
20
30
40
50
60
70
80
90
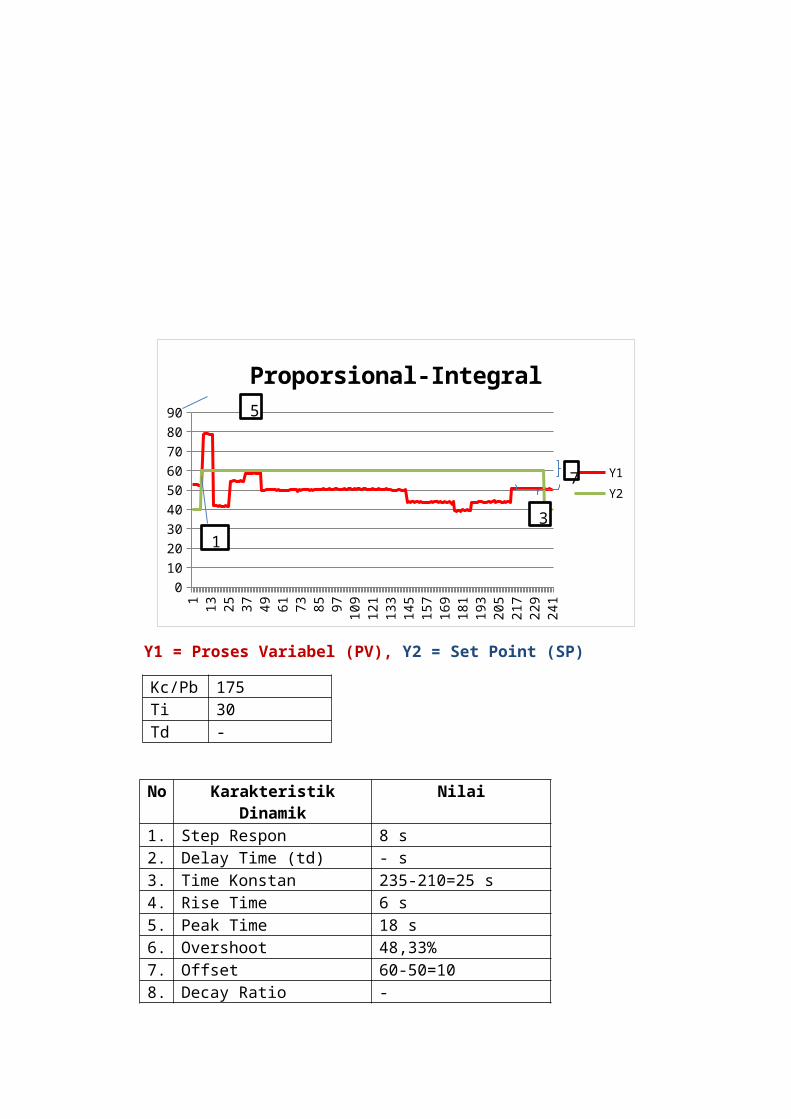
Proporsional-Integral
Y1Y2
13
5
7
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 30Td -
No Karakteristik Dinamik Nilai1. Step Respon 8 s2. Delay Time (td) - s3. Time Konstan 235-210=25 s4. Rise Time 6 s5. Peak Time 18 s6. Overshoot 48,33%7. Offset 60-50=108. Decay Ratio -
1 10 19 28 37 46 55 64 73 82 91 100
109
118
127
136
145
154
163
172
181
190
199
208
217
226
0
10
20
30
40
50
60
70
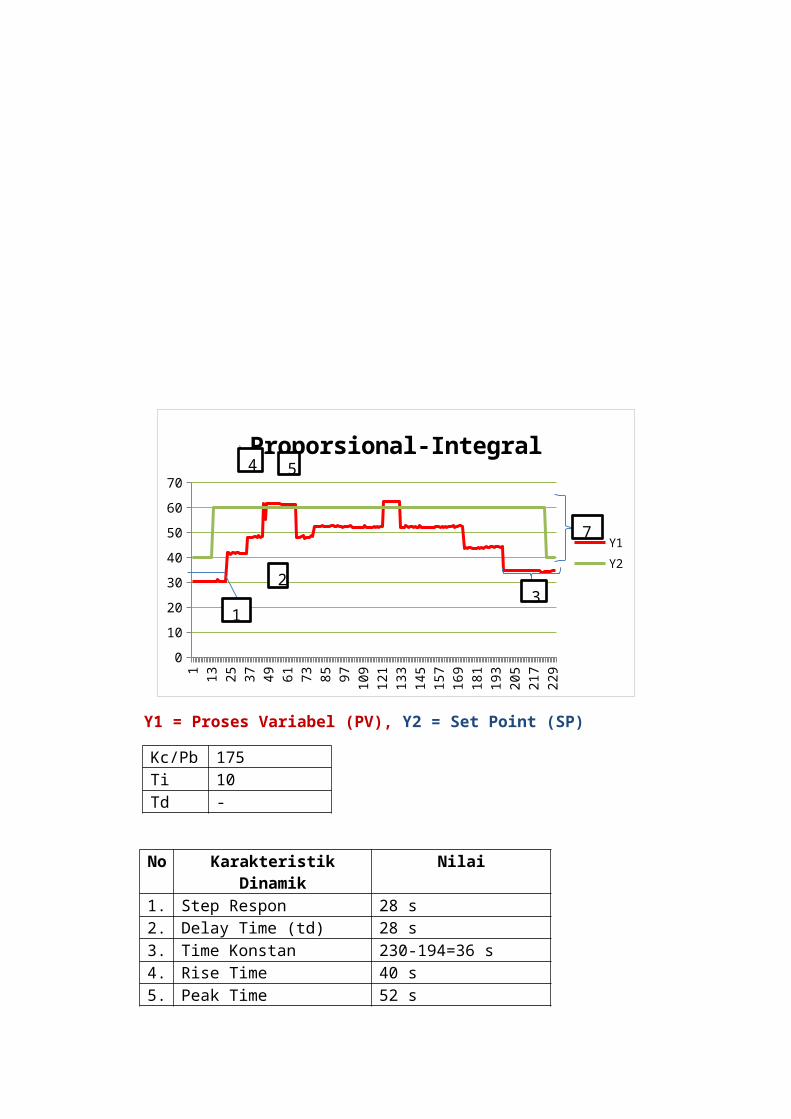
Proporsional-Integral
Y1Y2
7
31
2
4 5
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 10Td -
No Karakteristik Dinamik Nilai1. Step Respon 28 s2. Delay Time (td) 28 s3. Time Konstan 230-194=36 s4. Rise Time 40 s5. Peak Time 52 s6. Overshoot 57. Offset 258. Decay Ratio -
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99 106 113 120 127 134 141 1480
10
20
30
40
50
60
70
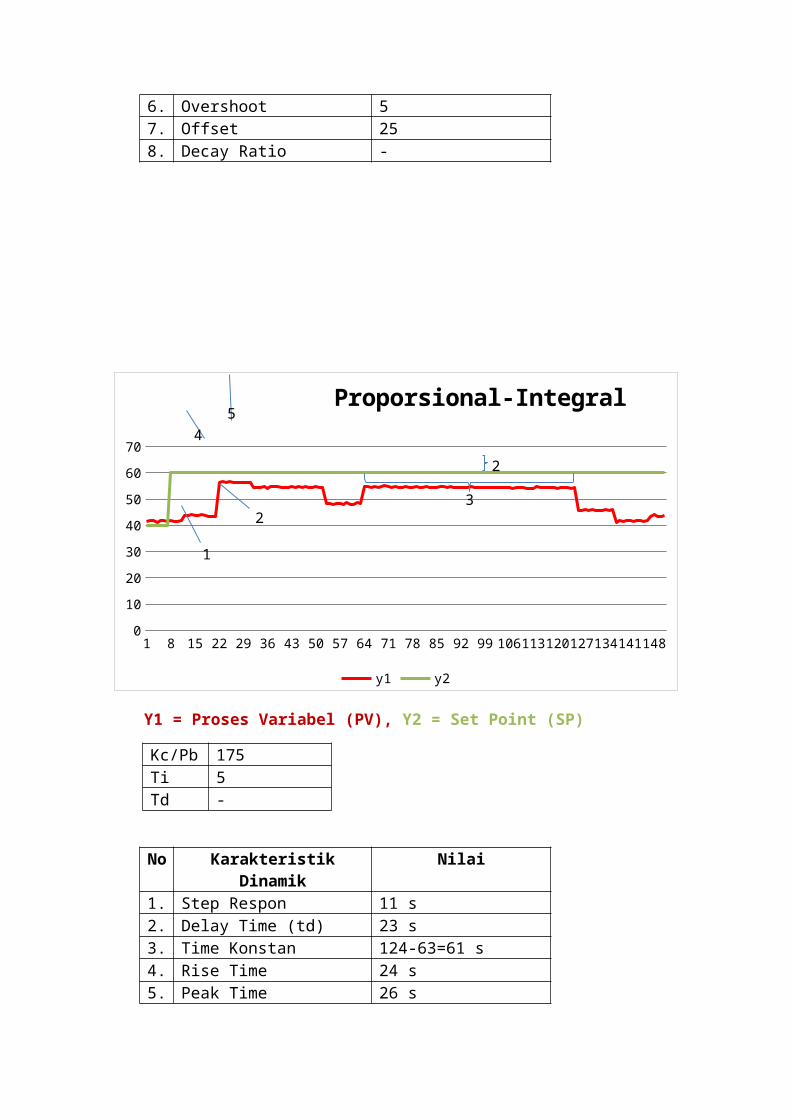
Proporsional-Integral
y1 y2
1
2
2
4
5
3
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 5Td -
No Karakteristik Dinamik Nilai1. Step Respon 11 s2. Delay Time (td) 23 s3. Time Konstan 124-63=61 s4. Rise Time 24 s5. Peak Time 26 s6. Overshoot -7. Offset 60-54=68. Decay Ratio -
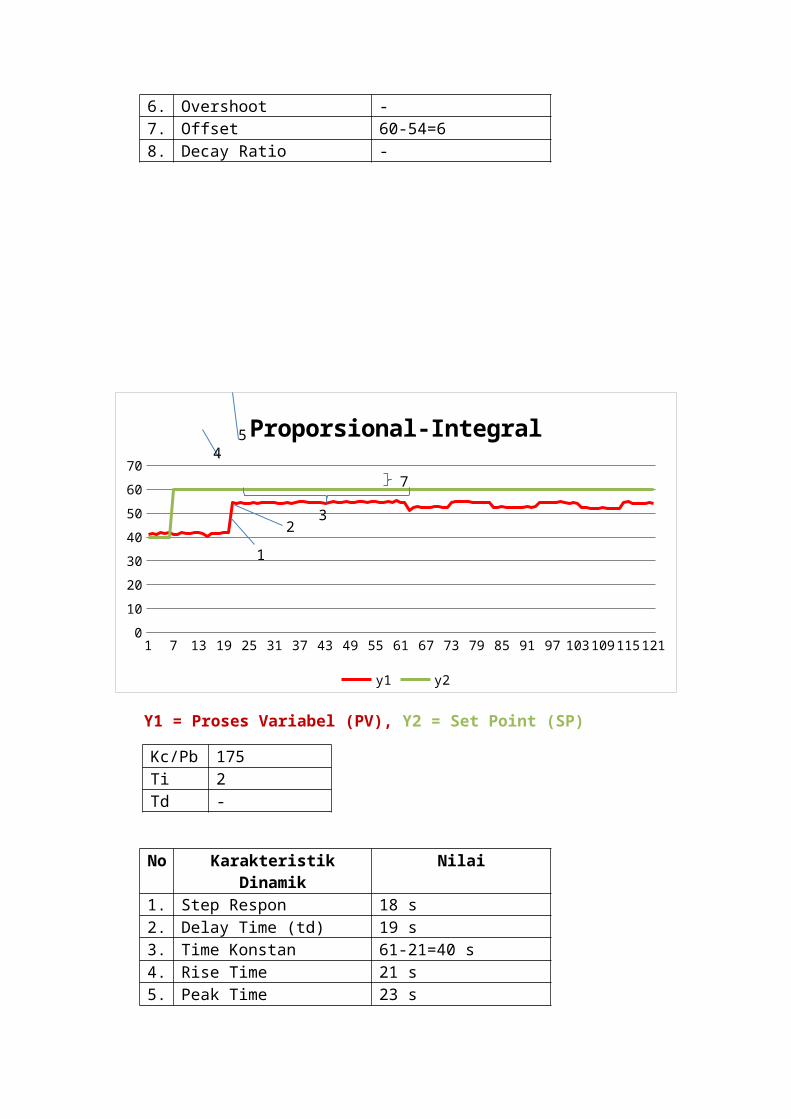
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96 1011061111161210
10
20
30
40
50
60
70
Proporsional-Integral
y1 y2
1
7
2
45
3
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 2Td -
No Karakteristik Dinamik Nilai1. Step Respon 18 s2. Delay Time (td) 19 s3. Time Konstan 61-21=40 s4. Rise Time 21 s5. Peak Time 23 s6. Overshoot -7. Offset 60-54=68. Decay Ratio -
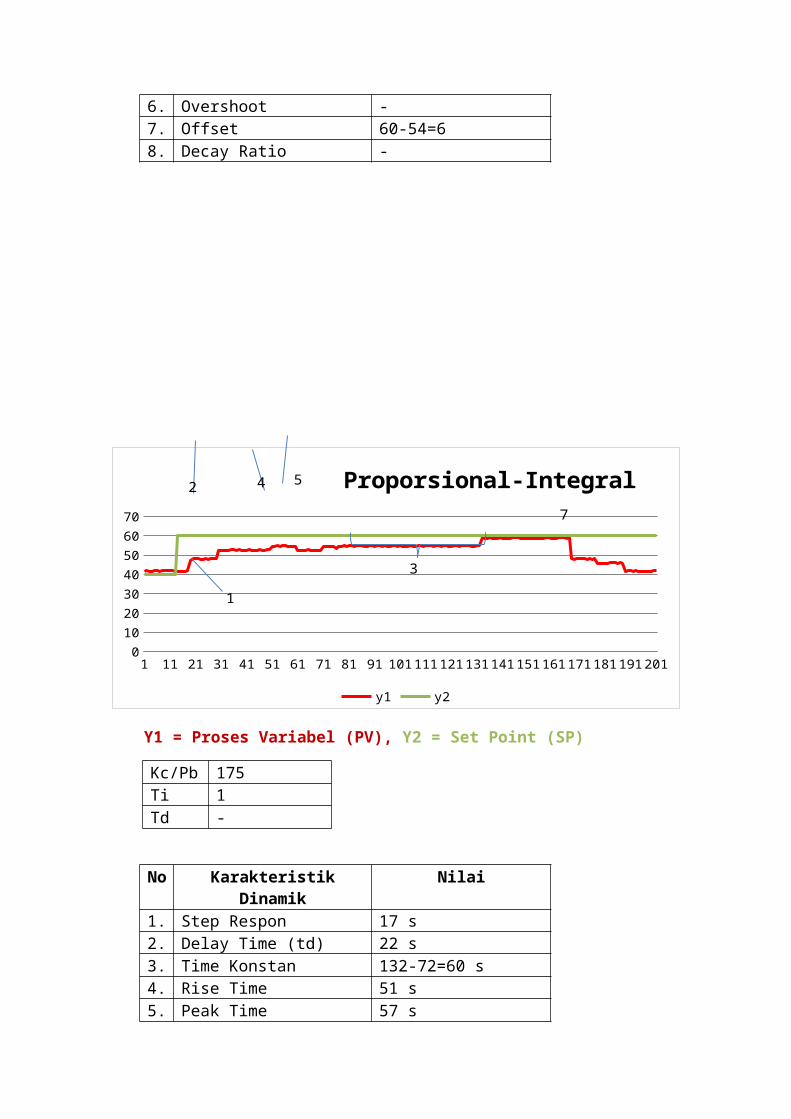
1 10 19 28 37 46 55 64 73 82 91 100 109 118 127 136 145 154 163 172 181 190 1990
10
20
30
40
50
60
70
Proporsional-Integral
y1 y2
7
1
3
2 4 5
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 1Td -
No Karakteristik Dinamik Nilai1. Step Respon 17 s2. Delay Time (td) 22 s3. Time Konstan 132-72=60 s4. Rise Time 51 s5. Peak Time 57 s6. Overshoot7. Offset 60-59=18. Decay Ratio
PENGENDALI PROPORSIONAL-INTEGRAL-DERIVATIF (PID)
1 12 23 34 45 56 67 78 89 100
111
122
133
144
155
166
177
188
199
210
221
232
243
254
265
276
287
298
0
20
40
60
80
100
120
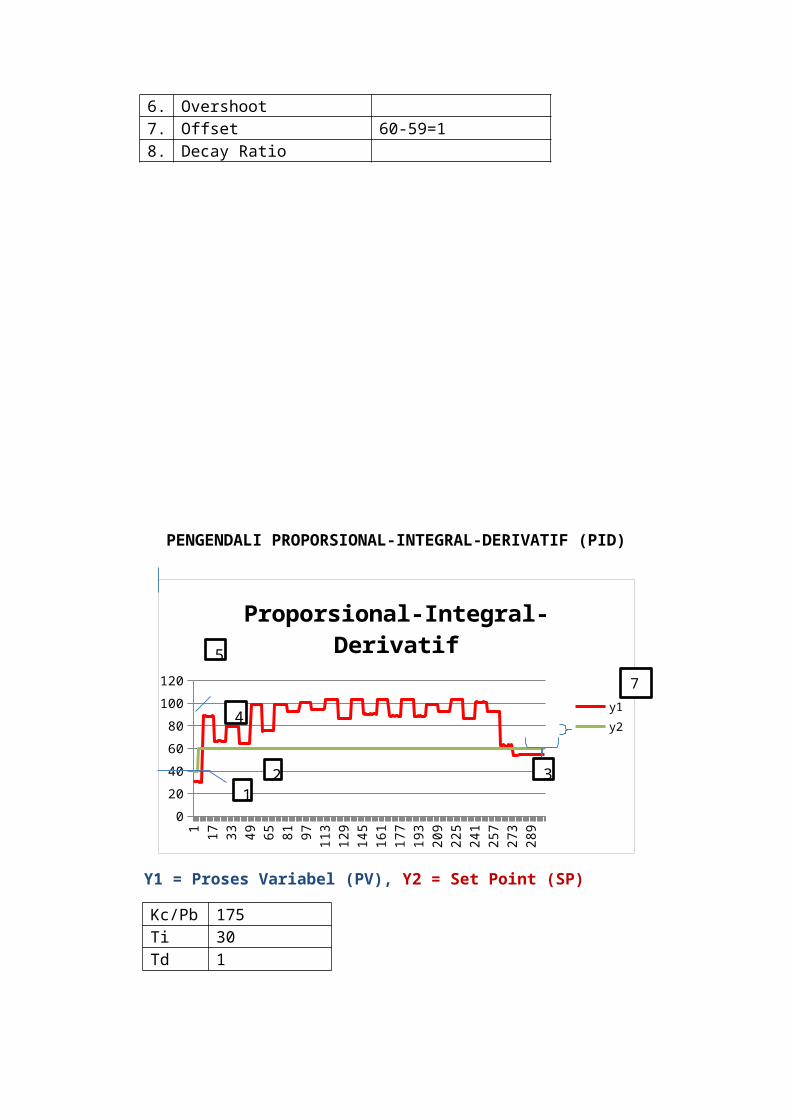
Proporsional-Integral-Derivatif
y1y2
12 3
4
5
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 30Td 1
No Karakteristik Dinamik Nilai1. Step Respon 72. Delay Time (td) 73. Time Konstan 300-270=30 s4. Rise Time 75. Peak Time 126. Overshoot 71,67%7. Offset 68. Decay Ratio -
77
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99 106
113
120
127
134
141
148
155
162
169
176
0102030405060708090
100
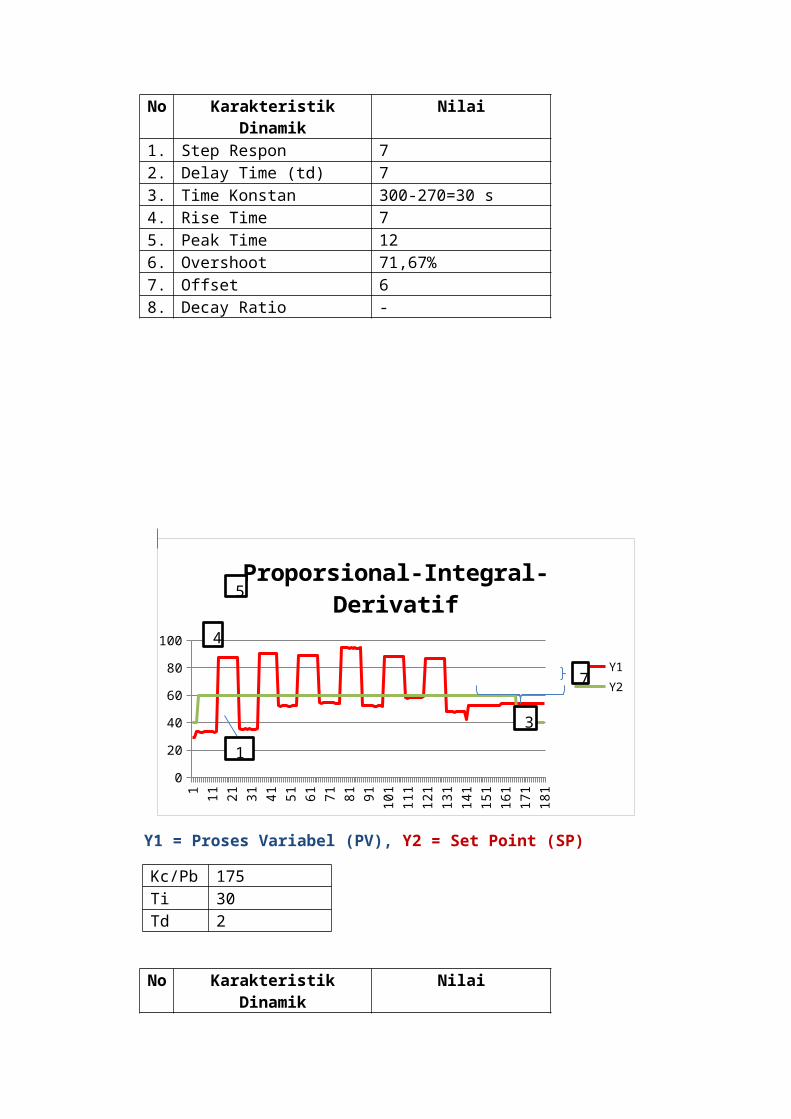
Proporsional-Integral-Derivatif
Y1Y2
1
3
4
5
7
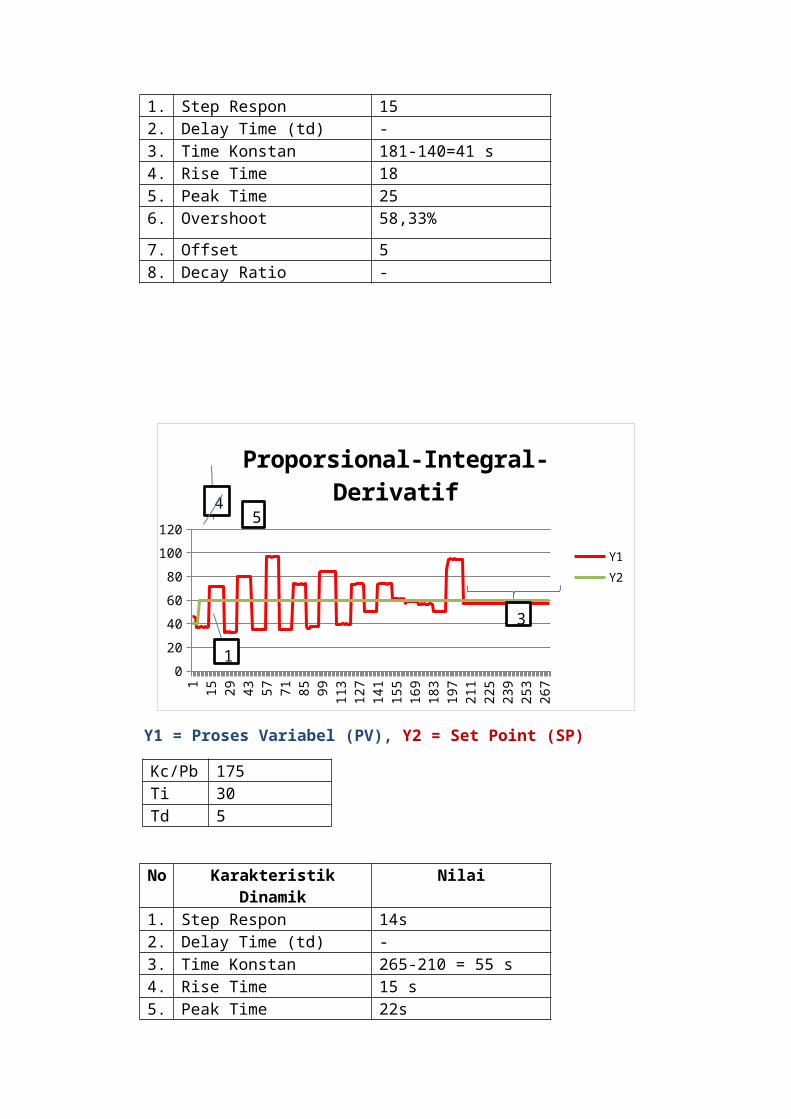
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 30Td 2
No Karakteristik Dinamik Nilai1. Step Respon 152. Delay Time (td) -3. Time Konstan 181-140=41 s4. Rise Time 185. Peak Time 256. Overshoot 58,33%
7. Offset 58. Decay Ratio -
1 11 21 31 41 51 61 71 81 91 101
111
121
131
141
151
161
171
181
191
201
211
221
231
241
251
261
271
0
20
40
60
80
100
120
Proporsional-Integral-Derivatif
Y1Y2
1
3
45
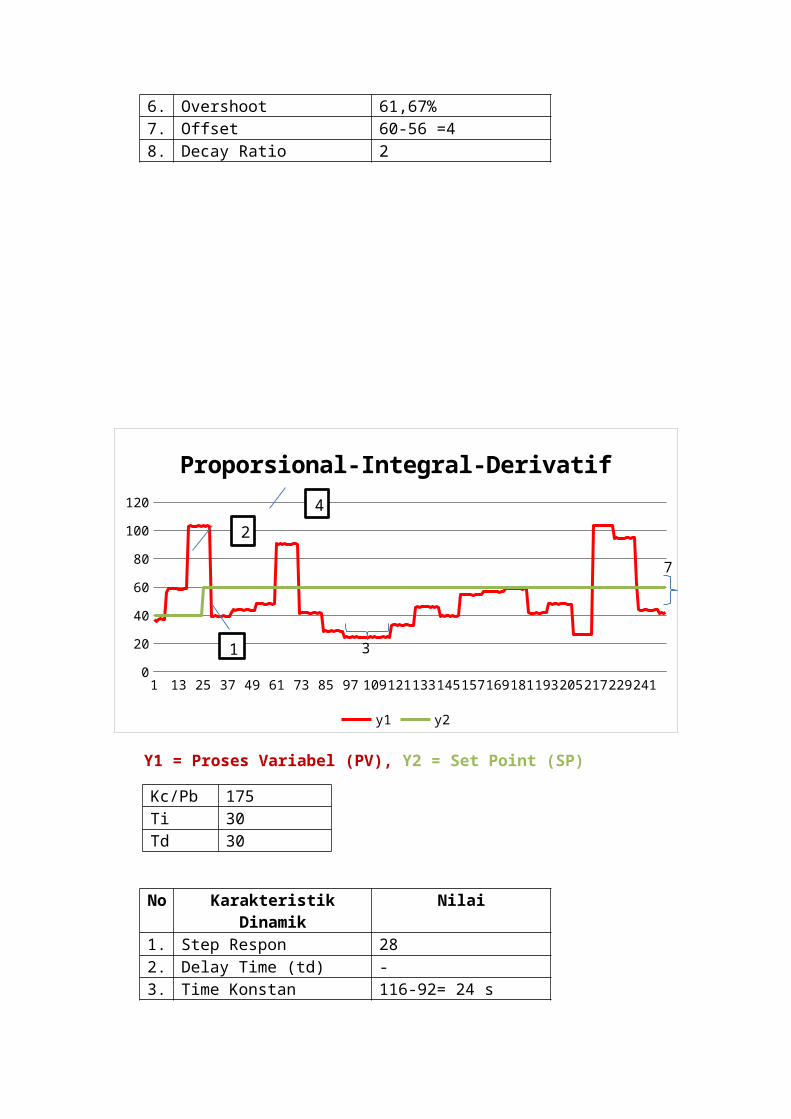
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 30Td 5
No Karakteristik Dinamik Nilai1. Step Respon 14s2. Delay Time (td) -3. Time Konstan 265-210 = 55 s4. Rise Time 15 s5. Peak Time 22s6. Overshoot 61,67%7. Offset 60-56 =48. Decay Ratio 2
1 12 23 34 45 56 67 78 89 100 111 122 133 144 155 166 177 188 199 210 221 232 2430
20
40
60
80
100
120
Proporsional-Integral-Derivatif
y1 y2
7
31
2
4
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 175Ti 30Td 30
No Karakteristik Dinamik Nilai1. Step Respon 282. Delay Time (td) -3. Time Konstan 116-92= 24 s4. Rise Time 285. Peak Time 646. Overshoot 30:11x100% = 272,73%7. Offset 60-42= 188. Decay Ratio -
4.2 PEMBAHASAN
Praktikum kali ini bertujuan untuk menentukan jenis pengendali yang cocok untuk
pengendalian aliran agar laju alir fluida sesuai denga nilai set point yang diinginkan. Jenis
parameter pengendali yng digunakan adalah pengendalian proposional (P), pengendali
proposional integral (PI) dan pengendali proposional integral derivative (PID).Variabel yang
dikendalikan adalah aliran/laju alir (PV). Untuk mengendalikan PV, dilakukan dengan
mengatur bukaan valve sehingga menghasilkan MV yang akan mempengaruhi nilai PV. Jika
aliran/laju alir dalam pipa kurang dari SP maka valve akan membuka, sedangkan jika
aliran/laju alir dalam pipa melebihi SP valve akan menutup. Maka dapat disimpulkan bahwa
pengendalian aliran aksi pengendalinya direct sehingga aksi plantnya reverse.
Proporsional (P)
Pada percobaan dilakukan variasi nilai PB (proporsional Band) dengan rentang nilai 20-
200%. Nilai set point (SP) yang dimasukkan adalah 60 L/h, dan nilai Ti dimasukkan 100000
dengan demikian maka pengaruh integral hampir tidak ada, Td=0.
Dilakukan variasi nilai Kc (Proporsional gain) tanpa pengaruh Integrasi dan Derivasi.
Dari hasil variasi pengendalian Kc, didapatkan bahwa semakin besar harga Kc, maka nilai
offset semakin kecil yang mengakibatkan grafik yang semakin stabil.
Nilai Kc terbaik yang digunakan adalah 175. Kelemahan dari pengendalian
proporsional adalah selalu menghasilkan error yang ditandai dengan besarnya niali offset.
Untuk menghilangkan offset perlu ditambahkan pengendalian integral yang bertujuan untuk
memnghilangkan offset. Semakin besar overshoot, system semakin tak stabil. Tetapi semakin
kecil overshoot system semakin lambat. Tapi pada pb/Kc 175 tidak terdapat overshoot
disimpulkan bahwa pengendali pada Kc 175 ini cepat tepat dan stabil.
Proporsional-Integral (PI)
Dengan pengendalian proporsional-integral diharpkan sistem lebih cepat mencapai set
point dan sistem berjalan stabil, serta nilai keluaran (PV) sama dengan nilai set point (SP).
Nilai Kc 175 dan Ti 30 yang terbaik digunakan pada saat melakukan pengendalian
Derivatif. Parameter waktu derivatif sangat peka terhadap gangguan sehingga menghasilkan
osilasi dan offset semakin besar. Waktu integral dengan nilai offset terbaik byaitu pada Ti 1
dan. Karena akan mempengaruhi pengendalian sistem menjadi tepat,cepat dan stabil.
Proporsional-Integral-Derivatif (PID)
Hasil percobaan menunjukkan bahwa pengendalian PID terbaik adalah pada Kc 175, Ti
30, dan Td 1. Dari hasil percobaan didapatkan bahwa semakin banyak parameter
pengendalian yang digunakan, maka pengendalian proses semakin mudah. Namun pada
pengendalian aliran, penggunaan pengendalian derivatif kurang efektif karena sistem tetap
mengalami overshoot, sedangkan tujua penggunaan pengendalian derivatif adalah untuk
menghilangkan overshoot.
BAB V
SIMPULAN
Kc (proporsional gain) terbaik yang digunakan 175
Ti (waktu integral) terbaik adalah 30
Td (waktu derivative) adalah 1
Hasil PB, Ti dan td terbaik
1 12 23 34 45 56 67 78 89 100
111
122
133
144
155
166
177
188
199
210
221
232
243
254
265
276
287
298
0
20
40
60
80
100
120
Proporsional-Integral-Derivatif
y1y2
12 3
4
5
Y1 = Proses Variabel (PV), Y2 = Set Point (SP)
Kc/Pb 200Ti 30Td 1
No Karakteristik Dinamik Nilai1. Step Respon 72. Delay Time (td) 73. Time Konstan 300-270=30 s4. Rise Time 75. Peak Time 126. Overshoot 71,67%7. Offset 68. Decay Ratio -
DAFTAR PUSTAKA
Heriyanto (2010). Pengendalian Proses. Jurusan Teknik Kimia, Bandung: POLBAN
Wade, H.L.(2004).Basic and Adavanced Regulatory Control: System Design and
Application.Ed.2,ISA,NC.