Embed Size (px)
Citation preview
LaValle, Steven M. "Rapidly-Exploring Random Trees A Цew Tool for Path Planning." (1998)RRT Navigation
Problem Statement
• How can we solve complex navigation problems in continuous space?
• Complex:• Many dimensions: X, Y, Z, theta
• Continuous:• Avoid discretization
Difficulties with other approaches
• Discretized solutions, e.g., A-star in grid world• Coarse grids don’t allow optimal plans• Fine grids become complex
• Most previous solutions don’t do well in high dimensional spaces
Solution
• Randomly grow a tree in continuous space• Root of the tree is starting location• When tree touches goal region we have a solution
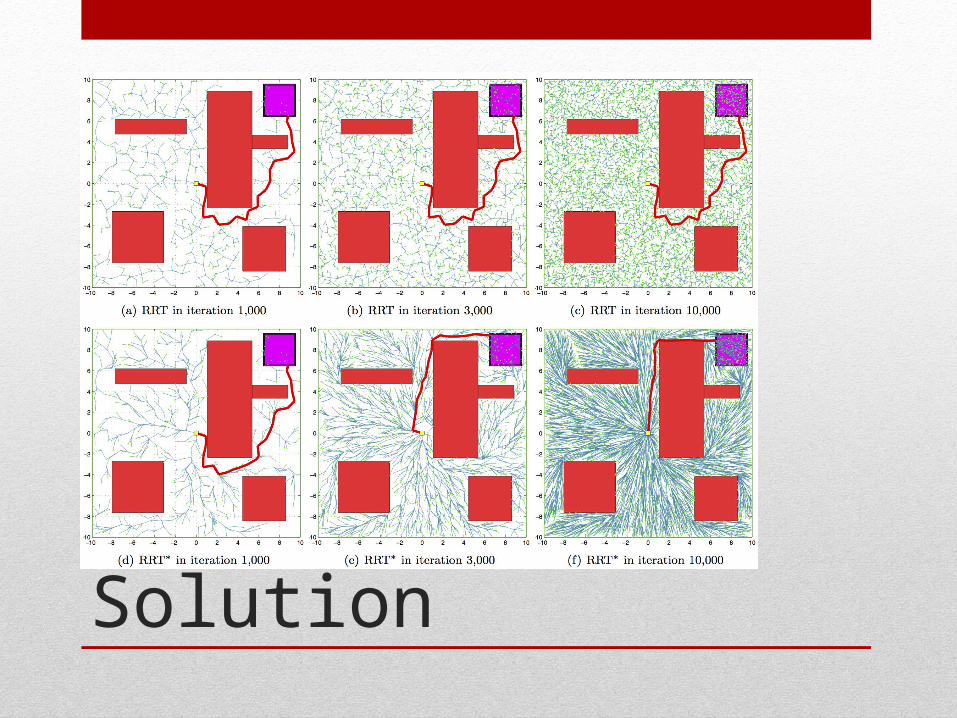
Solution
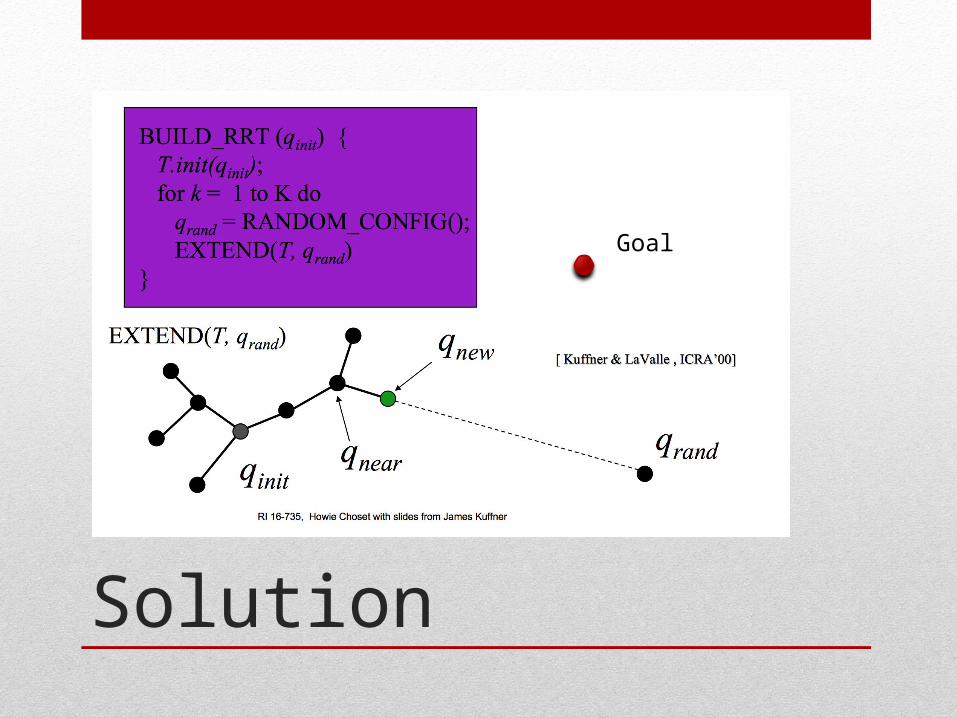
Solution
• Randomization Goal
Solution
• Improvement: Biases• Bias towards open spaces• Bias towards goal• – When generating a random sample, with some probability
pick the goal instead of a random node when expanding• – This introduces another parameter• – James’experience is that 5-10% is the right choice
• Provides faster convergence, better path solutions
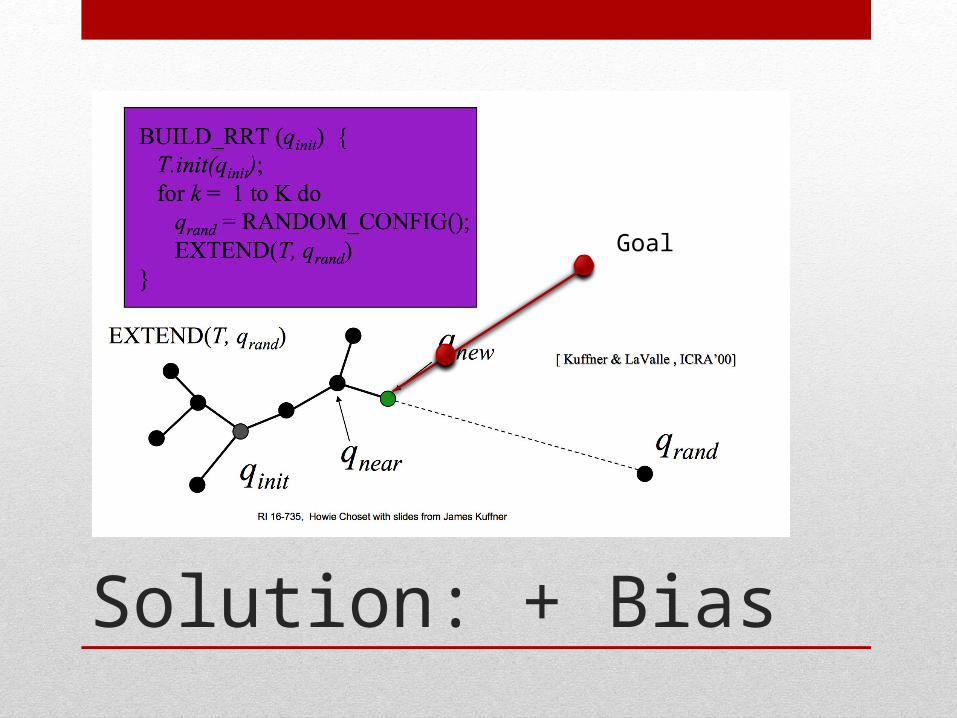
Solution: + Bias
• Randomization Goal
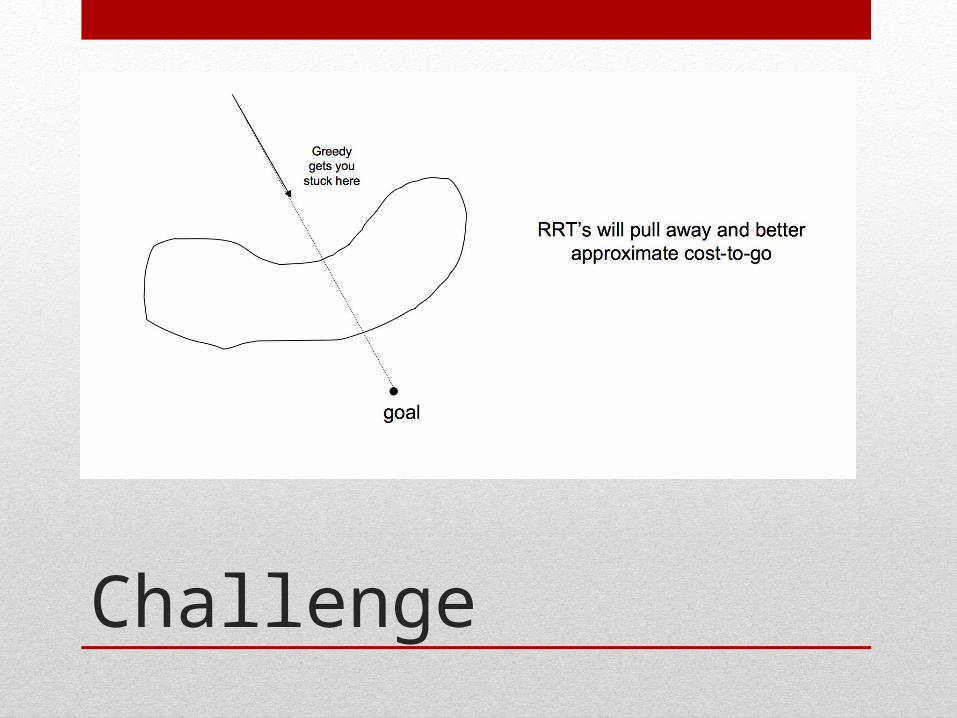
Challenge
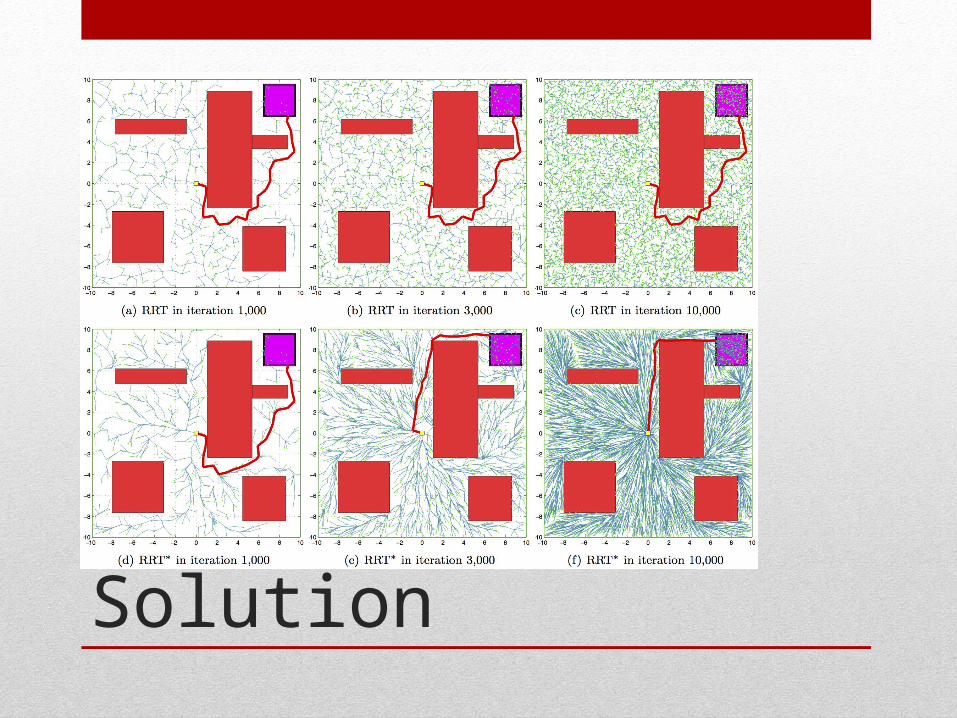
Solution

Experimental Methodology
• Not applicable for this paper
Experimental Results
• Not applicable for this paper
Example Videos
Strengths
• Fast• Continuous• High dimensionality
Weaknesses
• Solution not guaranteed• Solution not necessarily optimal
Questions?
![Robotic Motion Planning: RRT’smotionplanning/lecture/lec20.pdf · 2007. 11. 5. · Rapidly-Exploring Random Trees (RRTs) [Kuffner, Lavalle] The Basic RRT single tree bidirectional](https://img.pdfslide.net/doc/110x75/60f00c9195ca203cda2c94d8/robotic-motion-planning-rrtas-motionplanninglecturelec20pdf-2007-11-5.jpg)


![Intelligent bidirectional rapidly-exploring random trees ... · (PRM) [14] [15] and Rapidly exploring Random Trees (RRT) [23]. However, PRMs tend to be ine cient when obstacle geometry](https://img.pdfslide.net/doc/110x75/5fed728ed484d45f7e7546fc/intelligent-bidirectional-rapidly-exploring-random-trees-prm-14-15-and.jpg)






![Covering space with simple robots: from chains to random treesrobotics.cs.tamu.edu/dshell/papers/icra13rrt.pdfdata-structure, the Rapidly-exploring random tree (RRT) [4]. In fact,](https://img.pdfslide.net/doc/110x75/60947cc320669c1b641e5986/covering-space-with-simple-robots-from-chains-to-random-data-structure-the-rapidly-exploring.jpg)


















