-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
1/36
1
Interfacing to the Real World
Peripheral Chip Interfacing Memory vs. IO Mapped Software
Interaction with IO Chips
Polled IO vs. Interrupt Driven IO Advantages and
Disadvantages
Operation, Rom and Ram based Vector tables - Example 6811
Vectored and Auto Vectored IRQ example using 68000
Exceptions User and Supervisor Mode Processing
Memory Management Unit (MMU) Interfacing
Software Interrupts - Trap instructions
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
2/36
2
IO Interfaces to the Real World Most microcomputer systems are
designed for use in small embedded applications
where they typically interface to and control data from the real
world.
CPU manufacturers provide their own family ofperipheral
interface chips to make themore common interfacing functions fairly
straight forward and these chips areinterfaced to the CPU in more
or less the same way as memory by hooking them upto the Address and
Data Buses and using R/W and Chip Selects off Address and
IOdecoders.
CPU
CPU(68000)
CPU
CPU
ParallelIO
(M6821)
DigitalPush
ButtonInputs
PB1
PB2
PB3
PB4
CPU
Address and
Data BusSerialComms(M6850)
CPU
Events Analog InADC/DAC
(ADC8100)
Timer/Counter(M6840) Analog OutClock
RS-232
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
3/36
3
Peripheral Chip Interfacing Manufacturers differ slightly in
their interfacing
between peripheral chips and CPU: Twomethods supported IO Mapped
(supported mainly by Intel) Memory mapped (supported by most
other
manufacturers)
IO Mapped Peripherals
Occupy a separate address space to memory. Primitive attempt to
segregate Memory and IO. CPU issues a Signal (M/IO) to distinguish
a
Memory access from an IO access. IO/Memory decoders are enabled
offM/IO Special IO instructions are needed to access
address in the IO Space, i.e. ones that drive theM/IO signal
low.
For example Intel CPUs have the following 2instructions.
IN Port #, Register
OUT Port #, Register
Port # is presented as an 8 bit address. Data transfer between
register/IO over data bus. Separate IO space approach fallen out of
favour
as it means IO devices cannot be accessedusing C/C++ pointers,
(which generate Msignal not IO) meaning that you have to
embedassembly language into your C++ source code.
CPU
IOMapped
PeripheralChip
55
M/IO
R/W
Intel CPU
Reg AXAddress Bus
Logic 0 - IO AccessLogic 1 Memory Access
Logic 0 (Write Operation)
CPU
IO Port
Decoder
ChipSelect
ROMIO Ports
RAM
000000
007FFF
100000
8FFFFF
Memory Space
IO Space
000000
0000FF
void func1(){#asm
OUT 82, ax
IN 83, ax#endasm}
FFFFFF
Data Bus
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
4/36
4
main()
{char *ports = 0xC00000;char x ;
*ports = 0x55 ;x = *(ports + 1) ;
}
Peripheral Chip Interfacing
Memory Mapped Peripherals
Share the same address space as main
memory (i.e. they behave like memory). System designerpartitions
an area of the
system memory space for use by memorymapped peripherals simply
by extending theaddress decoder concept used by memory.
No need for separate IO space. No special instructions needed to
access IO. Programs can use a pointer in C/C++ to access
IO adding versatility. IO devices vulnerable to programs
accidentally
overwriting them.
CPU
MemoryMapped
PeripheralChip
R/W
MotorolaCPU
Address Bus
Logic 0 (Write Operation)
CPU
AddressDecoder
ChipSelect
ROM
IO Ports
RAM
000000
007FFF
C00000
C07FFF
100000
8FFFFF
ExampleMemoryMap
AS
Memory Access used for IO
void func1()
{ char *IOports = 0xC00000;char c ;
*IOports = 0x55 ;c = *(IOports + 1) ;
}
FFFFFF
Data Bus
Memory Space
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
5/36
5
Peripheral Registers All peripheral chips regardless of how they
are mapped, contain a number of
internal registers that control the configuration of the chip
and supply the CPU
with important status information about the device. In addition,
read and writeregisters facilitate communication between CPU and
outside world.
CPU
CPUCPU
CPU
RS-232
DigitalPush
Buttoninputs
PB1
PB2
PB3
PB4
Address andData BusSerial
CommsChip
ParallelIO
Chip
Control
Status
Read Data
Write Data
Control
Status
Read Data
Write Data
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
6/36
6
Peripheral Registers
Example 6850 Serial Comms Chip Control Register
Bits in this register control important functions in the chip.
By writing to this register we can control the behaviour of our
chip.
Bits2-4: Frame FormatData width (7 or 8 bits), Parity (odd,
even,none), Number of stop bits (1 or 2).
Bit 7 : Receiver ControlControls generation of an interrupt when
acharacter has been received.
ReceiverInterruptEnable
TransmitterControl
Word Select Clock Divisionand Reset
B7 B6 B5 B4 B3 B2 B1 B0Control Reg 6850
Bits 5-6: Transmitter ControlControls the state of the RTS line
used with amodem. Controls generation of interrupt whentransmitter
empty.
Bits 0-1: Reset and Clock divisorProvides a software master
reset for the device.Clock division ratio (1, 16 or 64) i.e.
effectivebaud rate for transmitter and receiver sections.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
7/36
7
Peripheral Registers
Example 6850 Serial Comms Chip Status Register
Individual bits in this register indicate the state of play
within the chip. By reading this register we can determine the
operating status of the chip.
Bit 5: Receiver Overrun
Bit 4 : Framing Error
Bit 6: Parity Error
Bit 3: Clear to Send (From a Modem)
Bit 2: Data Carrier Detect (From a Modem)
Bit 1: Transmit Data Register Empty
Bit 0: Receive Data Register Full
Bit 7: Device is generating an interrupt
Status Reg 6850
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
8/36
8
6811s On-Chip Memory Mapped IO
A 64 byte area of the 6811 address space between locations
[1000-103F] has beenset aside for the large number of IO ports,
(digital, serial, analog, time, watchdog etc.)
that exist on-chip. Some of the memory mapped registers are
shown below for the parallel IO ports.
Port B: 8 Bit Output port.
Port C: 8 Bit Bidirectional port.
Port C Data Direction Register0 = Input, 1 = Output
Port E: 8 Bit Input port.
Port D: 6 Bit Bidirectional port.
Port A: 8 Bit port. In or Out
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
9/36
9
Polled IO
Communicating with an IO Chip? Once initial configuration of the
chip has been performed in software, the
question of how to communicate with the outside world arises.
One simple approach is to poll each device in turn as part of a
program loop. That is, we read the status of the device by
interrogating its status register. When we determine that a device
has something to say, we deal with it. A system with 3 peripheral
IO chips might contain a polling loop like this one.
while(1){
if( serial IO port status registerindicates character
received)// Get Character from device and buffer it somewhere.
if( parallel IO device status registerindicates a push button
pressed)// get robot to back-up and change direction.
if( timerstatus registerindicates time has elapsed)// measure a
critical temperature/pressure/speed or whatever.
}
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
10/36
10
Polled IO
Advantages of Using Polling
Software is pretty easy to write, involving nothing more than a
simple loopand a few if tests to interrogate each device status in
turn.
Polling has the advantage that we make recognition of the
asynchronousinputs of the real world, synchronous to the execution
of our program, i.e.we get to chose when we recognise and respond
to a real world input,which makes testing and debugging of software
much easier.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
11/36
11
Polled IO
Disadvantages of Using a Polling Loop
Adding more IO devices to the system, degrades the response time
to anyone of them since it takes longer to poll more devices in
software.
An input (such as a push button being momentarily pressed) could
bemissed, if the signal is too briefto be recognised within the
polling loop timeperiod or if the CPU is busy dealing with
something else at the time.
It is not very efficient. The execution time for one iteration
of a polling loopcould take longer than the time required to
generate the response.
No Slack - A polling approach consumes 100% of CPU time leaving
nospare capacity for other activities that the system might need to
perform. OKif the system isnt doing anything else then fine, but
not so good if it is.
Lack ofprioritisation. If the CPU is busy dealing with less
importantinputs/events, there is no way for a more important input
to pre-empt it.
In real-time systems, polling leads to non-deterministic
response times andinefficient utilisation of the CPU.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
12/36
12
Interrupt Driven IO A better solution to overcome the problems
of polling would be to use interrupts. Here, instead of our CPU
asking each I/O device in turn if they have anything
important to report (i.e. polling), the I/O device itself can be
programmed toattract the attention of the CPU by asserting an
Interrupt request signal (IRQ )when it requires the attention of
the CPU.
CPUs have varying numbers of interrupt request pins that are
generallyprioritised, the 6811/8051 has 2, the 68000 has 7.
IRQ
IRQ
IRQ
CPUCPU
CPU
CPU
Parallel
IOChip
RS-232
Digital
PushButtoninputs
PB1
PB2PB3
PB4
CPUTimer
Address and Data BusSerialComms
Chip
IRQ Control Register programschips IRQ capability
Data ReceivedIRQ1
IRQ2
IRQ3
Button Pressed
Time-Out
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
13/36
13
Advantages of Interrupt Based Systems
The response time to each IO device interrupt is independent of
the numberof IO devices in the system (provided the system is not
overloadedwith
interrupt requests). This makes response times more predictable
and leadsto a more deterministic system.
IO devices can be prioritised in hardware thus a high priority
IO device canoverride (i.e. interrupt) a lower priority one.
Inputs from the real world should never be missed even if the
system isbusy. The interrupt signal will stay asserted until the
CPU deals with it.
Creates Spare Processing Capacity: The system is able to perform
othermore mundane tasks at a lower priority level, or even sit
idle, while waitingfor an IO device to inform it of the need to
respond and thus CPU utilisationis reduced enabling the CPU to do
other things.
This last point is particularly important in a multi-tasking
operating systemenvironments where many programs may be scheduled
simultaneously andare time-sliced.
In summary the use of interrupts leads to betterresponse time
andimproved CPU utilisation.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
14/36
14
Disadvantages to Interrupt Driven Systems
Usually require more complex/expensive hardware and software
architectures.For example the system may require
The use of IO devices capable ofgenerating an interrupt (not all
of themcan or may not be able to generate them under the conditions
you want).
More complex (multi-threaded) code to deal with the interrupt
and route therequest for service to a users program where the data
is then madeavailable to the main code (i.e. there are possibly
problems ofmutualexclusion and threadsynchronisation associated
with the use of interrupts).
More difficult to debug.
Interrupts are asynchronous to the operation of the rest of the
system andcan occur with unpredictable frequency and timing
relative to the executionof the program, making it very difficult
to debug.
Recreating the set of circumstances that led to the bug in your
code isvirtually impossible since the real world cannot be single
stepped and it maybe difficult to recreate the combination of
asynchronous inputs that lead to
the failure/bug being identified in the first place.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
15/36
15
Interrupts: the Basics
An interrupt then is an asynchronous signal generated by an IO
chip torequest service from a CPU.
In response to an interrupt request (IRQ), the CPU:-
Finishes the current instruction (which cannot be
interrupted).
Saves the value of the Program counter(PC) onto the
hardwarestack this is to enable the CPU to remember where it was in
yourprogram so that it can resume after the interrupt has been
dealt with.
Saves the internal state of the processor onto the stack
including
The Condition Code Register (CCR)
Other registers depending upon the particular CPU.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
16/36
16
Interrupts: the Basics
Identifies and prioritises which external IRQ pin(s) are
being
asserted. If two different IRQ pins are active at the same
instant thehighest priority IRQ is dealt with first.
Executes an Interrupt Service Routine (ISR) which must as
aminimum
Save additional CPU registers that might be overwritten by code
within the ISR.
Identify the chip asserting the IRQ by interrogating its status
register.
Deal with the reason for the interrupt (e.g. data has been
received)
Clearthe interrupt within the device requesting service.
Restore the additional registers saved above.
Execute a return from Interrupt (RTI) instruction at the end of
the ISR whichrestores the CCR and PC registers stacked earlier.
This last instruction (RTI) returns control of the CPU back to
theprogram immediately following the instruction where the
interruptoccurred. This action is summarised in the next
diagram.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
17/36
17
Interrupt Action (the basics)
Normal Processing
Interrupt Service Routine (ISR)
Interrupt(s)
Save Additional CPU Registers
Service Highest Priority Requesting Device(+ Clear its IRQ)
Restore Additional Registers
RTI
CompleteCurrent
Instruction
Main ProgramSuspended for
Duration ofISR
Ideally Keep ISRShort and Fast
Interrupt Latency is a measure of the time taken toservice the
IRQ. This is important in real-time systems as
all other processing is suspended during this time.
ResumeWithRestOf
Program
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
18/36
18
Question: How does the CPU find its way to the Interrupt Service
Routine (ISR)?That is, how do we get it to execute the code that
deals with the interrupt?
At a purely hardware level, the CPU has been designed to fetch
the address of theInterrupt Service Routine from a special Vector
Table located in Rom (so that it isalways there when power is
applied.) when the interrupt occurs.
The Vector Table also deals with Resets and otherExceptions in
the same way.
The Vector Table contains one entry foreach IRQ that the CPU has
been designedto deal with (2 for the 6811 external interrupts, 7for
the 68000).
Each entry in the vector table contains an address. It is to
this address that theCPU jumps and expects to find your ISR code to
deal with the interrupt.
If you are designing your own embedded microcontroller
application, you mustplace the address of yourISR into the Vector
Table before you blow the ROM.
Note: If you are running under an Operating system
(Windows/Linux) or a debugmonitor (such as buffalo) these programs
build an additional jump table (in RAM)which allows you to install
your ISR with a suitable system call afterthe system has
booted and afteryour main program begins execution.
Interrupt Action (the basics)
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
19/36
19
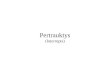
The table opposite is the interruptVector table for the 6811
which resides
at the top of the64
k memory map. Each vector table entry is 2 bytes in size
and contains a 16 bit addresscorresponding to an ISR for that
IRQ.
The 6811 has a lot of built in IOcapability and many of these
are able togenerate their own IRQ thus there are alot of entries in
the vector table one foreach source of internal interrupt.
Two external sources of interrupt aretriggered by the IRQ and
XIRQ pins.
When an XIRQ interrupt request isreceived the 6811 fetches a 16
bit entryfrom the vector table corresponding tothe XIRQ, i.e. the
16 bit address storedat [FFF4,FFF5]
It then jumps to the address specified bythat table entry and
expects to find yourISR to deal with devices connected tothe XIRQ
pin.
Note reset vector (FFFE,FFFF) works inthe same way as do all
other kinds ofinterrupt, each with its own vector exceptthat reset
never returns
6811 Interrupt Vector Table
Vector for XIRQ found at$FFF4/FFF5Each vector comprises a two
byte entry
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
20/36
20
Normal Processing
XIRQ Interrupt S. Routine $C000
XIRQ
Stack Additional CPU Registers
Service Requesting DeviceClear its IRQ
Restore Additional RegistersRTI
CompleteCurrent
Instruction
ResumeRestOf
Program
Main ProgramSuspended for
Duration of ISR
Contents = $C000 XIRQ=[FFF4,FFF5]
ROM Vector Table
Stack PC, CCR
Index intoVector Table
for XIRQ Entry
PC = $C000
Hardware Processing
FFC0
FFFF
6811 XIRQ Interrupt Action (Detail)
Store address of your XIRQISR in locations $FFF4-$FFF5,
i.e. ISR can be found at$C000 in this example
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
21/36
21
Maskable Interrupts
All interrupt capable peripherals have the ability to control
whether the chip shouldgenerate an interrupt or not via interrupt
mask bits in the chips control register.
In addition, all CPUs have the ability to postpone recognition
of some or all of theirinterrupts until later, by masking the
recognition of the interrupt within the CPUstatus orcondition code
register
In the case of the 6811, the IRQ and XIRQ external interrupts
are controlled by the Iand X bits in the 6811s condition code
register.
These interrupts are initially masked after a reset to prevent
spurious interrupts beingrecognised while the system is being
initialised.
In the 6811 all internal memory mapped peripherals with
interrupt generatingcapability can be masked (disabled) by setting
the I bit in the 6811s condition coderegister
There are two assembly language instructions in the6
811 instruction set to changethe value of the I bit
CLI - Clear Interrupt bit (allowing recognition of interrupts)
SEI - Set Interrupt bit (postpone recognition until I cleared)
To enable the X input, use the TAP instruction transfer
accumulator A to conditioncode register to clear the X bit.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
22/36
22
Interrupts/Exceptions on otherProcessors
The 68000, MIPS and ARM processor are typical of more modern
16/32/64 bit CPUs in that they offer awider range of prioritised
interrupt levels.
Support forVectored interrupt handling, (the Peripheral chip
directly points the CPU to its ISR). Interrupts are part of a more
general exception
handling policy which (for the 68000) is closely linkedto
Userand Supervisorstates within the CPU (see later)
The 68000 Interrupt Interface
7 prioritised IRQ levels encoded via IPL0 IPL2 Level 7 is
non-maskable (cannot be ignored). Status register controls IRQ
masking via bits I2 I0 Function code pins FC0-FC2 indicate type
ofbus
cycle and state. (Note interrupt acknowledge cycle).
Note Supervisorand Usermodes and S bit (see later)
s
Status Register
I2 I1 I0
FC2 FC1 FC0 Memory access type0 0 0 Undefined --reserved0 0 1
User data access0 1 0 User program access0 1 1 Undefined
--reserved1 0 0 Undefined --reserved1 0 1 Supervisor data access1 1
0 Supervisor program access1 1 1 Interrupt Acknowledge
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
23/36
23
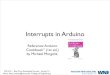
The 68000 Exception Table and Operation
The table opposite shows the vector table for the68000. Each
entry is 4 bytes in size.
Auto-Vectored Interrupts : Vectors 25 - 31
Intended for use by dumb peripherals For IRQ levels 1-7, the CPU
uses one of the auto
vectors 25-31 based on the level of the interrupt. Thus a dumb
peripheral asserting a level 3 IRQ will
eventually be serviced by the ISR whose addresscan be found at
location [00 006C-00 006F]
UserProgrammable Vectored Interrupts: Vectors64 - 255
Intended for modern 16-bit peripherals to provide afaster, more
direct response to the IRQ.
Such devices are able to supply an 8 bit vectornumber(programmed
into them as part of theirinitialisation) during an interrupt
acknowledge(IACK) cycle (i.e. pins FC2-FC0 = {1,1,1}).
This vector number is multiplied by 4 (i.e. shiftedleft 2 bit
positions) to generate the address of thecorresponding vector table
entry.
For example, an interrupting peripheral chip thatsupplies
vector#64 during an InterruptAcknowledge cycle will eventually be
serviced byan ISR whose address can be found at location
[00 0100 00 0103
]
VectorNumber
VectorAddress
ExceptionType/Description
0 000 Reset Initial Stack Pointer
1 004 Reset Initial Program Counter2 008 Bus Error3 00C Address
Error4 010 Illegal Instruction5 014 Divide by Zero6 018 CHK
Instruction7 01C TRAPV Instruction8 020 Privi lege Violation9 024
Trace Exception10 028 Line 1010 Emulation11 02C Line 1111
Emulation12 030 (Unassigned Reserved)13 034 (Unassigned Reserved)14
038 (Unassigned Reserved)15 03C Uninitialised Interrupt Exception16
040 (Unassigned Reserved) 23 05C (Unassigned Reserved)24 060
Spurious Interrupt Exception25 064 Level 1 Interrupt Auto Vector26
068 Level 2 Interrupt Auto Vector27 06C Level 3 Interrupt Auto
Vector28 070 Level 4 Interrupt Auto Vector29 074 Level 5 Interrupt
Auto Vector30 078 Level 6 Interrupt Auto Vector
31 07C Level 7 Interrupt Auto Vector32 080 TRAP #0 Instruction
Vector33 084 TRAP #1 Instruction Vector 47 0BC TRAP #15 Instruction
Vector48 0C0 (Unassigned - Reserved) 63 0FC (Unassigned Reserved)64
100 User Programmable Vectored Interrupt 255 3FC User Programmable
Vectored Interrupt
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
24/36
24
68000 Vectored Interrupts
The 68000 supports seven levels ofPrioritised Interrupts 1-7 via
the
3 external CPU pins [IPL2 - IPL0]
Level 0 indicates that no interrupt is present. Levels 1-7 are
prioritised with 7 being the highest. The 68000s status register
bits (I2, I1, I0) indicate the current level of
interrupt request being serviced. Interrupt requests with a
priority less than or equal to the current value
ofI2, I1, I0 will be postponed until later. Level 7 interrupts
are non-maskable and thus can never be ignored.
The sequence of operations required to generate an
interruptrequest is
A peripheral requests attention by asserting its (IRQ*) output
The IRQ* is connected to a priority encoderwhich generates a
3-bit
code indicating the highest level of Interrupt request currently
beinggenerated.
The 3 bit output from this encoder is connected to pins
IPL0-IPL2
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
25/36
25
68000 Vectored Interrupts
Upon receipt of an Interrupt Request
The 68000 compares the level of the interrupt request with the
value of its interrupt
mask flags (I2, I1, I0) in the Status register.
If the requested interrupt level is greater than (I2, I1, I0),
the interrupt is serviced,otherwise it is postponed.
In servicing the interrupt: The interrupt mask flags (I2, I1,
I0) in the status registerare set to the level of the
interrupt being serviced and the supervisor S bit is also set to
1.
The function code pins (FC2,FC1, FC0) are set to {111} to inform
the system that aninterrupt acknowledge (IACK) is in progress
The level of the interrupt being acknowledged is placed on (A3,
A2, A1).
A read of the data bus is performed (during which an intelligent
peripheral has theoption to supply a vector numberto the CPU during
this IACK cycle).
An external interrupt acknowledge decoder, decodes the address
lines(A3, A2, A1) in conjunction with the function code pins
(FC2,FC1, FC0) and assertsone of seven IACK* lines that connect
back to the peripheral.
The asserted IACK* line informs the interrupting device that it
is about to beserviced.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
26/36
26
68000 Vectored Interrupts
After the appropriate IACK* line is asserted by the 68000, the
following
operations are performed. The peripheral supplies its Vector
numberonto the data bus lines (D0-D7).
The peripheral drives DTACK*.
The 68000 reads the vector number on (D0-D7), shifts this left 2
places (x4),and accesses the interrupt service routine using the
vector number as anindex into the vector table.
Only one vector capable device should be wired directly to each
IACK* lineto prevent multiple devices responding with their own
vector number duringan interrupt acknowledge cycle.
Note: There are two variations to this procedure
IfDTACK* is not asserted, BERR* (Bus Error) must be asserted by
anexternal timer to force a spurious interrupt exception. Vector24
is then called(see vector table). This would occur if no peripheral
owned up to generatingthe interrupt.
If a peripherals vector registerhas not been initialized with an
appropriatevector number in software, it will generate $0F as the
vector to force an
uninitialized interrupt vector exception. Vector15is called (see
vector table).
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
27/36
27
68000
IPL0IPL1IPL2
FC0FC1FC2
A01A02
A03
EncodedInterruptRequestInputs
Function Code[1,1,1] = IACK
Cycle
IACK Level onAddress Bus
Address Bus
Data Bus
0000
Status Reg
InterruptMask bits set
to level ofIRQ beingrecognised
PriorityEncoder
InterruptAcknowledge
Decoder
Peripheral 1
120
IRQ* IACK*
IACK1*IACK2*IACK3*IACK4*
IACK5*IACK6*
IACK7*
IRQ1*
IRQ2*IRQ3*IRQ4*
IRQ5*
IRQ6*IRQ7*
Peripheral 2
130
IRQ* IACK*
7Levels
ofIRQ
7Levels
ofIACK
PeripheralsuppliesVector #onto Data
Bus
IRQ onLevel 2
IACKReceived
ROM Vector Table
Stack Pointer
Reset Vector
Vector 120
Vector 130
010
111
01
0
130
Level 2 IRQ at CPU
CPU acknowledges level 2 IRQ
DTACK*
PeripheralDrives
DTACK*
Vector RegisterVector RegisterGet
ISR
0101
S bit
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
28/36
28
PeripheralSuppliesVector
Normal Processing(User Mode)
Level 1 ISR at $0000D000
Level 1 IRQ
Stack Additional CPU RegistersService Requesting Device
Clear its IRQRestore Additional Registers
RTE
CompleteCurrent
Instruction
ResumeRestOf
Program
MainProgram
Suspendedfor
Duration ofISR
ROM Vector Table
Save PC, SR, S=1
IACK Cycle
Address = Vector
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
29/36
29
IACK1*IACK2*IACK3*IACK4*
IACK5*IACK6*
IACK7*
IRQ1*
IRQ2*IRQ3*IRQ4*
IRQ5*
IRQ6*IRQ7*
7Levels
ofIRQ
7Levels
ofIACK
IACK*Propagator
IACK*Propagator
IACK*Propagator
IACK*Propagator
Peripheral 3
122
IRQ* IACK*
Peripheral 4
123
IRQ* IACK*
Vector # 123 supplied
Vector Register
Vector Register
Peripheral 1
120
IRQ* IACK*
Vector Register
Peripheral 2
121
IRQ* IACK*
Vector Register
If IACK* receivedand CHIP is notasserting IRQ,
propagator passes
on IACK* to nextin line. Furthestaway has lowest
priority
IRQ Sharing in a Vectored Environment:Leads to faster Response
than Polling
DTACK*
Address Bus
Data Bus
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
30/36
30
Auto-Vectored Interrupts
Auto-vectored interrupts are intended for dumber peripherals
that cannot
supply a vector during an Interrupt acknowledge cycle like
the6850,6821 etc.
The process is similar to Vectored interrupts except that after
the appropriateIACK* line is asserted during an interrupt
acknowledge cycle by the 68000:
The interrupting device will assert the 68000s VPA* line (Valid
PeripheralAddress)
Upon receiving an asserted VPA* line, the 68000 knows that the
peripheralis a dumb device incapable of supplying a vector. The
68000 then:
Generates its own interrupt vector numberinternally based upon
the prioritylevel of the IRQ* line that is being asserted.
The 68000 reserves vector numbers 25-31 forauto vectored
interrupts on
IRQ1*-IRQ7* Several peripherals can be assigned to the same IRQ*
level, in which case
the appropriate auto-vectored interrupt handler routine will
have to resort toPOLLING each of the possible peripheral by reading
their interrupt statusregisters to determine which of them is
generating the interrupt.
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
31/36
31
68000
IPL0*
IPL1*
IPL2*
FC0FC1FC2
A01A02
A03
EncodedInterruptRequestInputs
Function Code[1,1,1] = IACK
Cycle
IACK Level onAddress Bus
Address Bus
Data Bus
0000
Status Reg
PriorityEncoder
InterruptAcknowledge
Decoder
IRQ*
IACK1*IACK2*IACK3*IACK4*
IACK5*IACK6*
IACK7*
IRQ1*
IRQ2*IRQ3*IRQ4*
IRQ5*
IRQ6*IRQ7*
7Levelsof IRQ
7Levels
ofIACK
IRQ onLevel 2
IACKReceived
Vector Table
Stack Pointer
ResetVector
Vector 25
Vector 26
010
111
01
0
Level 2 IRQ at CPU
IACK on level 2
VPA*
DumbPeripheral
VPAGenerated
GetISR
InterruptMask bits set
to level ofIRQ beingrecognised
S bit
0101
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
32/36
32
Normal Processing(User Mode)
Level 3 ISR at $0000F000
Level 3 IRQ
Stack Additional CPU RegistersService Requesting Device
Clear its IRQRestore Additional Registers
RTE
CompleteCurrent
Instruction
ResumeRestOf
Program
MainProgram
Suspendedfor
Duration ofISR
$0000F000
ROM IRQ Auto Vector Table
Save PC, SR, S=1
Index into VectorTable for Level 3
IRQ
PC = $0000F000
Hardware Processing
(Supervisor Mode)
00000000
$0000E000
$0000D000 Level 1 IRQ (Auto Vector) $000064 - $000067
$00012000
$00011000
$00010000
$00012000
68000 Auto Vectored Interrupt Operation
Level 2 IRQ (Auto Vector) $000068 - $00006B
Level 3 IRQ (Auto Vector) $00006C - $00006F
Level 4 IRQ (Auto Vector) $000070 - $000073
Level 5 IRQ (Auto Vector) $000074 - $000077
Level 6 IRQ (Auto Vector) $000078 - $00007B
Level 7 IRQ (Auto Vector) $00007C - $00007F
S=0
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
33/36
33
68000 Processing and Privilege States To fully appreciate how
the 68000 and other advanced processors deal with exceptions
one
has to appreciate that the 68000 is always operating in one of
two states. The state information is used by memory management
units (MMUs) which are used to
enforce protection between Kernel and Process code
Supervisormode (S-bit in 68000s Status register is 1) is
reserved for executingoperating system code and is associated with
a higher level of privilege that user mode.
Usermode (S-bit in 68000s status register is 0) is reserved for
executing userprograms, and is associated with a lower level of
privilege than supervisor mode.
Certain instructions and access to memory and memory mapped
peripherals may belimited in user mode to constrain the process to
accessing only the resources allocated
to it by an operating system.
From the state transition diagram below, we see that once the
CPU enters user mode, theonly way to move to the Supervisor mode is
via an exception, such as a reset, interrupt, etc.
An RTE instruction is used to restore the state of the CPU to
that which it was in prior to theexception occurring, for example
to change state back to usermode.
The RTE instruction itself is privileged: You can only execute
it in the supervisor mode
UserMode
SupervisorMode
Exception: IRQ, Reset etc
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
34/36
34
MMUAddressDecoder
MemorySystem
(Decoder plusMemory)
Typical 68000 MMU Interface
16 bit wide Data Bus
68000
A1 A23
D0 D15
MemoryManagement
UnitBERR
FC0 FC2
AS
Memory/IOSystem
(Decoder plusMemory)
AddressAddress Bus
Type of memory access andPrivilege
Page Fault exception
AS
MMUAddressDecoder
MMU validates each access to memory made by the code.If the code
is running in supervisor mode, access is always
allowed, if in user mode, address is validated against a setof
look up tables and a Page fault/exception may be
generated by the 68000s BERR* signal to signal an
invalidaccess
CS
Logical
AddressPhysical
Address
TranslationLook aside
Buffer
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
35/36
35
Trap Exceptions
These 15 instructions provide a means to execute
an OS Kernel call via an exception. Sometimes known as a
software interrupt since
the behaviour is similar to hardware but initiatedvia an
instruction rather than a physical signal
Imagine an OS kernel that contains 1000s ofsystem level
calls.
The user program needs to make these calls, buttheir execution
requires the CPU be in supervisormode as the call often involves
accessing
resources that are not normally accessible by theprogram e.g.
Kernel Code/IO devices etc. so theycannot be called like a
conventional subroutinebecause that would lead to an access made
inusermode (and the MMU would not permit it).
Instead the OS call is allocated a number, e.g.open file might
be 250, the kernel call is made byloading 250 into CPU registerD0
and thenexecuting one of the trap instructions associatedwith
calling the Kernel.
The exception handler for the Trap instruction iscalled and it
interprets the number in D0 and callsthe correct kernel function
(with the CPU now insupervisormode so that the MMU will permit
it).
At the end of the Kernel call, an RTE instructionreturn the CPU
back to the calling program inUserMode.
Software Interrupts and System CallsVectorNumber
VectorAddress
ExceptionType/Description
0 000 Reset Initial Stack Pointer1 004 Reset Initial Program
Counter2 008 Bus Error3 00C Address Error4 010 Illegal Instruction5
014 Divide by Zero6 018 CHK Instruction7 01C TRAPV Instruction8 020
Pr ivi lege Violation9 024 Trace Exception10 028 Line 1010
Emulation11 02C Line 1111 Emulation12 030 (Unassigned Reserved)13
034 (Unassigned Reserved)
14 038 (Unassigned Reserved)15 03C Uninitialised Interrupt
Exception16 040 (Unassigned Reserved) 23 05C (Unassigned
Reserved)24 060 Spurious Interrupt Exception25 064 Level 1
Interrupt Auto Vector26 068 Level 2 Interrupt Auto Vector27 06C
Level 3 Interrupt Auto Vector28 070 Level 4 Interrupt Auto Vector29
074 Level 5 Interrupt Auto Vector30 078 Level 6 Interrupt Auto
Vector
31 07C Level 7 Interrupt Auto Vector32 080 TRAP #0 Instruction
Vector33 084 TRAP #1 Instruction Vector 47 0BC TRAP #15 Instruction
Vector48 0C0 (Unassigned - Reserved) 63 0FC (Unassigned Reserved)64
100 User Programmable Vectored Interrupt 255 3FC User Programmable
Vectored Interrupt
-
8/7/2019 Lecture 16,17 - IO Interfacing and Interrupts
36/36
36
Full Privileges
Limited Privileges
S = 1
S = 0
Operating System(Supervisor Mode)
User Program 1(User Mode)
Operating System(Supervisor Mode)
User Program 1(User Mode)
Device1Device1
Device1RTC
Interrupt
Device1Device2
Interrupt
Device1
Device3
Interrupt
Device1Device4
Interrupt
Interrupt
Device1Push Button
Reset
System Call(Trap Exception)
Exit()
User Program 1(User Mode)
User Program 2(User Mode)
User Program 1(User Mode)
User Program 3(User Mode)
Full Privileges
Limited Privileges
S = 1
S = 0
Entry to Supervisor mode triggered by an exception
System Call(Trap Exception)CreateThread()
System Call(Trap Exception)
OpenFile()