-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
1/391
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Ch 8 Industrial Robotics
Sections:
1. Robot Anatomy and
Related Attributes
1. Robot Control Systems
2. End Effectors
3. Sensors in Robotics
4. Industrial Robot Applications
5. Robot Programming
6. Robot Accuracy and Repeatability
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Industrial Robot Defined
A general-purpose, programmable
machine capable of possessing certain
anthropomorphic characteristics.
The most obvious anthropomorphic
characteristic of an industrial robot isits mechanical arm,
which is used to
perform various industrial tasks.
Other human-like characteristics are:
robots capabilities to respond to sensory inputs,
communicate with other machines, and
make decisions.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
2/392
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Industrial Robot Defined
These capabilities permit robots to perform a variety of
useful task.
The development of robot technology followed the
development of numerical control, and the two
technologies are quite similar.
They both involve coordinated control of multiple axes
(the axes are calledjo in ts in robotics), and they both
use dedicated digital computers as controllers.
Typical production applications of industrial robots
include spot welding, material transfer, machine
loading, spray painting, and assembly.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Industrial Robot Defined
Robots can be substituted for humans in hazardous or
uncomfortable work environments.
A robot performs its work cycle with a consistency and
repeatability that cannot be attained by humans.
Robots can be reprogrammed. When the productionrun of the
current task is completed, a robot can be
reprogrammed and equipped with the necessary
tooling to perform an another different task.
Robots are controlled by computers and can therefore
be connected to other computer systems to achieve
computer integrated manufacturing.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
3/393
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Anatomy
Robot manipulator - a series of joint-link combinations
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Anatomy
Manipulator consists of joints and links
Joints provide relative motion
Links are rigid members between joints
Various joint types: linear and rotary Each joint provides a
degree-of-freedom
Most robots possess five or six degrees-of-freedom
Robot manipulator consists of two sections:
Body-and-arm for positioning of objects in the
robot's work volume
Wrist assembly for orientation of objects
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
4/394
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Types of Manipulator Joints
Translational motion
Linear joint (type L)
Orthogonal joint (type O)
Rotary motion
Rotational joint (type R)
Twisting joint (type T)
Revolving joint (type V)
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Translational Motion Joints
Linear joint
(type L)
Orthogonal joint
(type O)
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
5/395
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Rotary Motion Joints
Rotational joint
(type R)
Twisting joint
(type T)
Revolving joint
(type V)
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Joint Notation Scheme
Uses the joint symbols (L, O, R, T, V) to designate joint
types used to construct robot manipulator
Separates body-and-arm assembly from wrist assembly
using a colon (:)
Example: TLR : TR
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
6/396
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Body-and-Arm Configurations
Five common body-and-arm configurations for industrial
robots:
1. Polar coordinate body-and-arm assembly
2. Cylindrical body-and-arm assembly
3. Cartesian coordinate body-and-arm assembly
4. Jointed-arm body-and-arm assembly
5. Selective Compliance Assembly Robot Arm (SCARA)
Function of body-and-arm assembly is to position an end
effector (e.g., gripper, tool) in space.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Polar Coordinate
Body-and-Arm Assembly
Notation TRL:
Consists of a sliding arm (L joint) actuated relative to
thebody, which can rotate about both a vertical axis (T joint)and
horizontal axis (R joint)
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
7/397
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Cylindrical Body-and-Arm Assembly
Notation TLO:
Consists of a vertical column,
relative to which an arm
assembly is moved up or down
The arm can be moved in or out
relative to the column
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Cartesian Coordinate
Body-and-Arm Assembly
Notation LOO:
Consists of three sliding joints,
two of which are orthogonal
Other names include rectilinear
robot and x-y-z robot
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
8/398
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Jointed-Arm Robot
Notation TRR:
General configuration
of a human arm
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
SCARA Robot
Notation VRO
SCARA stands for Selectively
Compliant Assembly Robot Arm.
Similar to jointed-arm robot except
that vertical axes are used forshoulder and elbow joints.
The arm is very rigid in the vertical direction, but
compliant in the horizontal direction.
This permits the robot to perform insertion tasks (for
assembly) in a vertical direction, where some side-to-
side alignment may be needed to mate the two parts
properly.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
9/399
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Joint Notations
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
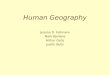
Wrist Configurations
Wrist assembly is attached to end-of-arm
End effectoris attached to wrist assembly
Function of wrist assembly is to orient end effector
Body-and-arm determines global position of end
effector
Two or three degrees of freedom:
Roll
Pitch
Yaw
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
10/3910
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Wrist Configuration
Typical wrist assembly has two or three degrees-of-
freedom (shown is a three degree-of freedom wrist)
Notation :RRT
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
SCARA Robot - No wrist
The SCARA robot configuration is
unique in that it typically does not
have a separate wrist assembly.
Since it is used for insertion type
assembly operations in which theinsertion is made from above,
the
orientation requirements are
minimal, and the wrist is therefore
not needed.
Orientation of the object to be inserted is sometimes
required, and an additional rotary joint can be provided
for this purpose.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
11/3911
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Work Volume
The work volume (the term work envelope is also used) ofthe
manipulator is defined as the envelope or three-dimensional space
within which the robot can manipulatethe end of its wrist.
Work volume is determined by the number and types ofjoints in
the manipulator (body-and-arm and wrist), theranges of the various
joints, and the physical sizes of thelinks.
The shape of the work volume depends largely on therobots
configuration. A polar configuration robot tends tohave a partial
sphere as its work volume, a cylindricalrobot has a cylindrical
work envelope, and a Cartesiancoordinate robot has a rectangular
work volume.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Work Volume
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
12/3912
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Joint Drive Systems
Electric
Uses electric motors to actuate individual joints
Preferred drive system in today's robots
Hydraulic
Uses hydraulic pistons and rotary vane actuators
Noted for their high power and lift capacity
Pneumatic Typically limited to smaller robots and simple
material
transfer applications
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Speed
The drive system, position sensors (and speed sensors if
used), and feedback control systems for the joints
determine the dynamic response characteristics of the
manipulator.
The speed with which the robot can achieve aprogrammed position
and the stability of its motion are
important characteristics of dynamic response in robotics.
Speed refers to the absolute velocity of the manipulator at
its end-of-arm.
The maximum speed of a large robot is around
2 m/s (6 ft/s).
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
13/3913
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Speed
Speed can be programmed into the work cycle so that
different portions of the cycle are carried out at different
velocities.
What is sometimes more important than speed is the
robots capability to accelerate and decelerate in a
controlled manner.
In many work cycles, much of the robots movement is
performed in a confined region of the work volume, so the
robot never achieves its top-rated velocity.
In these cases, nearly all of the motion cycle is engaged in
acceleration and deceleration rather than in constant
speed.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Speed
A term that takes all of these factors into consideration is
speed of response, which refers to the time required for
the manipulator to move from one point in space to the
next.
Speed of response is important because it influences therobots
cycle time, which in turn affects the production rate
in the application.
Stability refers to the amount of overshoot and oscillation
that occurs in the robot motion a the end-of-arm as it
attempts to move to the next programmed location.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
14/3914
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Load Carrying Capacity
Load carrying capacity depends on the robots physical
size and construction as well as the force and power that
can be transmitted to the end of the wrist
The weight carrying capacity of commercial robots ranges
from less than 1 kg up to approximately 900 kg (2000 Ib).
Medium sized robots designed for typical industrial
applications have capacities in the range of 10 to 45 kg
(25 to 100 Ib).
One factor that should be kept in mind when considering
load carrying capacity is that a robot usually works with a
tool or gripper attached to its wrist.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
The actuations of the individual joints must becontrolled in a
coordinated fashion for themanipulator to perform a desired motion
cycle.
Microprocessor-based controllers are commonly
used today in robotics as the control systemhardware.
The controller is organized in a hierarchicalstructure, so that
each joint has its own feedbackcontrol system, and a supervisory
controllercoordinates the combined actuations of the
jointsaccording to the sequence of the robot program.
Different types of control are required for
differentapplications.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
15/3915
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control System
Hierarchical control structure of a robot microcomputer
controller
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
1. Limited sequence control pick-and-place
operations using mechanical stops to set positions
2. Playback with point-to-point control records
work cycle as a sequence of points, then plays back
the sequence during program execution3. Playback with continuous
path control greater
memory capacity and/or interpolation capability to
execute paths (in addition to points)
4. Intelligent control exhibits behavior that makes it
seem intelligent, e.g., responds to sensor inputs,
makes decisions, communicates with humans
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
16/3916
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
1. Limited sequence control
The most elementary control type.
It can be utilized only for simple motion cycles, such
as pick-and-place operations (i.e.. picking an object
up at one location and placing it at another location).
It is usually implemented by setting limits or
mechanical stops for each joint and sequencing the
actuation of the joints to accomplish the cycle.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
1. Limited sequence control
Feedback loops are sometimes used to indicate that
the particular joint actuation has been accomplished
so that the next step in the sequence can be
initiated.However, there is no servo-control to accomplish
precise positioning of the joint.
Many pneumatically driven robots are limited
sequence robots.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
17/3917
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
2. Playback with point-to-point control
Playback robots represent a more sophisticated
form of control than limited sequence robots.
Playback control means that the controller has a
memory to record the sequence of motions in a
given work cycle as well as the locations and other
parameters (such as speed) associated with each
motion and then to subsequently play back the work
cycle during execution of the program.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
2. Playback with point-to-point control
In point-to-point (PTP) control, individual positions of
the robot arm are recorded into memory.
These positions are not limited to mechanical stops
for each joint as in limited sequence robots; instead,each
position in the robot program consists of a set
of values representing locations in the range of each
joint of the manipulator.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
18/3918
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
2. Playback with point-to-point control
Thus, each point consists of five or six values
corresponding to the positions of each of the five or
six joints of the manipulator.
For each position defined in the program, the joints
are thus directed to actuate to their respective
specified locations.
Feedback control is used during the motion cycle toconfirm that
the individual joints achieve the
specified locations in the program.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
3. Playback with continuous path control
Continuous path robots have the same playback
capability as the previous type.
The difference between continuous path and
point-to-point is the same in robotics as it is in NC.
A playback robot with continuous path control is
capable of one or both of the following:
1. Greater storage capacity for location
Thus, the points constituting the motion cycle can be
spaced very closely together to permit the robot to
accomplish a smooth continuous motion.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
19/3919
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
3. Playback with continuous path control
2. Interpolation
In point-to-point systems, the x,y, and z axes arecontrolled to
achieve a specified point location withinthe robots work
volume.
In continuous path systems, not only are the x,y, andz axes
controlled, but the velocities are controlledsimultaneously to
achieve the specified linear orcurvilinear path.
Servo-control is used to continuously regulate theposition and
speed of the manipulator.
It should be mentioned that a playback robot withcontinuous path
control has the capacity for PTPcontrol.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Control Systems
4. Intelligent control
Industrial robots are becoming
increasingly intelligent.
An intelligent robot is one that exhibits behavior that
makes it seem intelligent.
Some of the characteristics that make a robot
appear intelligent include the capacities to interact
with its environment, make decisions when things go
wrong during the work cycle, communicate with
humans, make computations during the motion
cycle, and respond to advanced sensor inputs such
as machine vision.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
20/3920
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
End Effectors
The special tooling for a robot that enables it to
perform a specific task.
Two types:
Grippers to grasp and manipulate objects (e.g.,
parts) during work cycle
Tools to perform a process, e.g., spot welding,
spray painting
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
End Effectors - Grippers
Mechanical grippers, consisting of two or more
fingers that can be actuated by the robot controller to
open and close to grasp the workpart.
Vacuum grippers, in which suction cups are used to
hold flat objects. Magnetized devices, for holding ferrous
parts.
Adhesive devices, which use an adhesive
substance to hold a flexible material such as a fabri.
Simple mechanical devices, such as hooks and
scoops.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
21/3921
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
End Effectors
Mechanical Grippers
Mechanical grippers are the most common grippertype.
Some of the innovations and advances inmechanical gripper
technology include:
1. Dual grippers consisting of two gripper devices inone end
effector for machine loading and unloading.(With a single gripper,
the robot must reach into theproduction machine twice.)
2. Interchangeable fingers that can be used on onegripper
mechanism.
To accommodate different parts, different fingers areattached to
the gripper.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
End Effectors
Mechanical Grippers
3. Sensory feedback in the fingers that provide the
gripper with capabilities such as:
(1) sensing the presence of the workpart or,
(2) applying a specified limited force to the workpart
during gripping (for fragile workparts).
4. Multiple fingered grippers that possess the general
anatomy of a human hand.
5. Standard gripper products that are commercially
available, thus reducing the need to custom-design
a gripper for each separate robot application.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
22/3922
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Mechanical Gripper
A two-finger mechanical gripper for grasping rotational
parts.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Tools
The robot uses tools to perform processing operations
on the workpart.
The robot manipulates the tool relative to a stationary or
slowly moving object (e.g., workpart or subassembly).
Examples of the tools used as end effectors by robots toperform
processing applications include spot welding
gun; arc welding tool; spray painting gun; rotating
spindles for drilling, routing, grinding, and similar
operations; assembly tool (e.g., automatic screwdriver);
heating torch; ladle (for metal casting); and water jet
cutting tool.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
23/3923
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Tools
In each case, the robot must not only control the relative
position of the tool with respect to the work as a function
of time, it must also control the operation of the tool.
For this purpose. the robot must be able to transmit
control signals to the tool for starting, stopping, and
otherwise regulating its actions.
In some applications, the robot may use multiple tools
during the work cycle.
For example, several sizes of routing or drilling bits must
be applied to the workpart.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Tools
Thus the robot must have a means of rapidly changing
the tools.
The end effector in this case takes the form of a fast-
change tool holder for quickly fastening and unfastening
the various tools used during the work cycle.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
24/3924
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Sensors in Robotics
Two basic categories of sensors used in industrial robots:
1. Internal - used to control position and velocity of the
manipulator joints.
These sensors form a feedback control loop with the
robot controller.
Typical sensors used to control the position of the robot
arm include potentiometers and optical encoders.
Tachometers of various types are used to control thespeed of the
robot arm.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Sensors in Robotics
2. External - used to coordinate the operation of the robot
with other equipment in the work cell.
In many cases, these external sensors are relatively
simple devices, such as limit switches that determine
whether a part has been positioned properly in a fixtureor that
a part is ready to be picked up al a conveyor.
Other situations require more advanced sensor
technologies.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
25/3925
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Sensors in Robotics - External
Tactile - touch sensors and force sensors
Proximity - when an object is close to the sensor
Optical (e.g. Photocell)
Machine vision
Machine vision is used in robotics for inspection.
parts identification, guidance, and other uses.
Other sensors - temperature, fluid pressure, fluid flow,
electrical voltage, current, and various other
physicalproperties.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Application Characteristics
General characteristics of industrial work situations that
promote the use of industrial robots
1. Hazardous work environment for humans,
2. Repetitive work cycle,
3. Difficult handling task for humans (e.g., heavy parts),
4. Multishift operations, where workers should be changed,
5. Infrequent changeovers of the physical workplace,
6. Part position and orientation are established in the work
cell, since most robots in todays industrial applications
are without vision capability.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
26/3926
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Industrial Robot Applications
1. Material handling applications
Material transfer pick-and-place, palletizing
(e.g., Transferring parts from one conveyor to another.)
Machine loading and/or unloading
(e.g., Die casting, plastic molding, machining,
forging,pressworking, heat treating, ...)
2. Processing operations
Spot welding and continuous arc welding
Spray coating
Other waterjet cutting, laser cutting, grinding,
drilling,polishing, wire brushing, ...
3. Assembly and inspection
4. Changing tools, even the work holding devices in
themachines.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Arrangement of Cartons on Pallet
The robot retrieves parts, cartons, or other objects from
one location and deposits them onto a pallet or other
container at multiple positions on the pallet.
Although the pickup point is the same for every cycle, the
deposit location on the pallet is different for each carton.
Either the robot must be taught each position on the pallet
using the powered leadthrough method, or it must
compute the location based on the dimensions of the
pallet and the center distances between the cartons (in
both x- and y-directions).
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
27/3927
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Arrangement of Cartons on Pallet
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Depalletizing
Other applications similar to palletizing include
depalletizing, which consists of removing parts from an
ordered arrangement in a pallet and placing them at
another location (e.g., onto a moving conveyor), stacking
operations, which involve placing flat parts on top of
eachother, such that the vertical location of the drop-off
position
is continuously changing with each cycle, and inspection
operations, in which the robot inserts parts into the
compartments of a divided carton.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
28/3928
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robotic Arc-Welding Cell
Robot performs
flux-cored arc
welding (FCAW)
operation at one
workstation while
fitter changes
parts at the other
workstation
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Programming
Leadthrough programming - work cycle is taught to
robot by moving the manipulator through the required
motion cycle and simultaneously entering the
program into controller memory for later playback
Robot programming languages - uses textualprogramming language
to enter commands into robot
controller
Simulation and off-line programming program is
prepared at a remote computer terminal and
downloaded to robot controller for execution without
need for leadthrough methods
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
29/3929
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Leadthrough Programming
Leadthrough programming dates from the early 1960s
before computer control was prevalent.
The same basic methods are used today for many
computer controlled robots.
In leadthrough programming, the task is taught to the
robot by moving the manipulator through the required
motion cycle, simultaneously entering the program
into the controller memory for subsequent playback.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Leadthrough Programming
Two types:
1. Powered leadthrough
Common for point-to-point robots
Uses teach pendant to move joints to desired positionand record
that position into memory
2. Manual leadthrough
Convenient for continuous path control robots
Human programmer physical moves manipulator
through motion cycle and records cycle into memory
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
30/3930
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Teach Pendants for Powered
Leadthrough Programming
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Manual Leadthrough Programming
Manual leadthrough programming is convenient for
programming playback robots with continuous path
control where the continuous path is an irregular motion
pattern such as in spray painting.
This programming method requires the operator to physicallygrasp
the end-of- arm or the tool that is attached to the
arm and move it through the motion sequence, recording
the path into memory.
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
31/3931
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Manual Leadthrough Programming
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Manual Leadthrough Programming
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
32/3932
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Manual Leadthrough Programming
Because the robot arm itself may have significant mass andwould
therefore he difficult to move, a specialprogramming device often
replaces the actual robot forthe teach procedure.
The programming device has the same joint configuration asthe
robot and is equipped with a trigger handle (or othercontrol
switch), which the operator activates whenrecording motions into
memory.
The motions are recorded as a series of closely
spacedpoints.
During playback, the path is recreated by controlling theactual
robot arm through the same sequence of points.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Leadthrough Programming
Advantages
Advantages:
Can readily be learned by shop personnel
A logical way to teach a robot
Does not required knowledge of computer
programming Disadvantages:
Downtime - Regular production must be interrupted toprogram the
robot
Limited programming logic capability
Not readily compatible with modern
computer-basedtechnologies
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
33/3933
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
World and Tool Coordinate Systems
Coordinating the individual joints with the teach pendant isan
awkward and tedious way to enter motion commandsto the robot.
For example, it is difficult to coordinate the individual joints
ofa jointed-arm robot (TRR configuration) to drive the end-of-arm
in a straight-line motion.
Therefore, many of the robots using powered leadthroughprovide
two alternative methods for controlling movement
of the entire manipulator during programming in addition
tocontrols for individual joints.
With these methods the programmer can move the robotswrist end
in straight line paths.
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
The names given to these alternatives are
(1) world-coordinate system and
(2) tool-coordinate system.
Both systems make use of a Cartesian coordinate system.
In a world-coordinate system, the origin and axes are
definedrelative to the robot base.
In a tool-coordinate system, the alignment of the axis systemis
defined relative to the orientation of the wrist faceplate(to which
the end effector is attached).
In this way, the programmer can orient the tool in a desiredway
and then control the robot to make linear moves indirections
parallel or perpendicular to the tool.
World and Tool Coordinate Systems
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
34/3934
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
World Coordinate System
Origin and axes of robot manipulator are defined relative
to the robot base
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Tool Coordinate System
Alignment of the axis system is defined relative to
theorientation of the wrist faceplate (to which the end effectoris
attached)
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
35/3935
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Programming Languages
Textural programming languages provide the opportunity to
perform the following functions that leadthrough
programming cannot readily accomplish:
Enhanced sensor capabilities
Improved output capabilities to control external equipment
Program logic not provided by leadthrough methods
Computations and data processing similar to computer
programming languages
Communications with other computer systems
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Motion Programming Commands
MOVE P1
HERE P1 - used during leadthrough of manipulator
MOVES P1
DMOVE(4, 125)APPROACH P1, 40 MM
DEPART 40 MM
DEFINE PATH123 = PATH(P1, P2, P3)
MOVE PATH123
SPEED 75
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
36/3936
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Interlock and Sensor Commands
Input interlock:
WAIT 20, ON
Output interlock:
SIGNAL 10, ON
SIGNAL 10, 6.0
Interlock for continuous monitoring:
REACT 25, SAFESTOP
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Gripper Commands
Basic commands
OPEN
CLOSE
Sensor and and servo-controlled handsCLOSE 25 MM
CLOSE 2.0 N
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
37/3937
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Simulation and Off-Line Programming
In conventional usage, robot programming languages still
require some production time to be lost in order to define
points in the workspace that are referenced in the
program
They therefore involve on-line/off-line programming
Advantage of true off-line programming is that the program
can be prepared beforehand and downloaded to the
controller with no lost production time
Graphical simulation is used to construct a 3-D model
of the robot cell in which locations of the equipment in
the cell have been defined previously
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Simulation and Off-Line Programming
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
38/3938
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
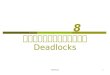
Robot Accuracy and Repeatability
Three terms used to define precision in robotics, similar to
numerical control precision:
1. Control resolution - capability of robot's positioning
system to divide the motion range of each joint into
closely spaced points
2. Accuracy - capability to position the robot's wrist at a
desired location in the work space, given the limits of the
robot's control resolution3. Repeatability - capability to
position the wrist at a
previously taught point in the work space
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Addressableposition
0 CR/2
Desiredposition
Control Resolution, Accuracy, and
Repeatability (from NC Chapter)
Possible
region for the
actual position
-
5/28/2018 Me 445 Groover Ch8 Industrial Robotics
39/3939
2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights
reserved. This material is protected under all copyright laws as
they currently exist.
No portion of this material may be reproduced, in any form or by
any means, without permission in writing from the publisher. For
the exclusive use of adopters of the bookAutomation, Production
Systems, and Computer-Integrated Manufacturing, Third Edition, by
Mikell P. Groover.
Robot Accuracy and Repeatability