Embed Size (px)
Citation preview

Measuring the Effectiveness of Three DimensionalDeterministic Lateral Displacement in Low
Viscosity Liquids
Brandon [email protected]
Sophie [email protected]
Kaley [email protected]
Jackson [email protected]
Sharon [email protected]
New Jersey Governor’s School of Engineering and Technology 2016
July 21, 2016
Abstract
With more research, three dimen-sional deterministic lateral displacement(3D DLD) has the potential to greatly im-prove the efficacy and flexibility of mi-crofluidic devices for separation within vari-ous fields of science, notably microbiology.As a particle passes through a set array ofobstacles submerged in liquid, its type ofmotion varies according to its specific prop-erties. Utilizing the differing movements,3D DLD can be used to separate variousparticles according to size, deformability,and other properties. The project focuseson testing the competence of 3D DLD sys-tems in a low viscosity liquid. Similar to thedata collecting and data processing proce-dure used in a previous 3D DLD experimentutilizing corn oil, this was accomplished
by analyzing particle motion in a differentfluid, namely, water. Analyzing disparitiesbetween the data sets revealed the effects onparticle motion through a fluid with a highReynolds number, as well as how the sep-aration mechanics of the passing fluid werealtered according to 3D DLD.
Analysis of the experimental data re-vealed important notes regarding particlesorting in lower viscosity fluids, many ofwhich directly correlate with similar cornoil results. Studies in two planes of mo-tion revealed distinct points for particle sep-aration regardless of the type of motion,and further comparisons of forcing, critical,and migration angles demonstrated sophis-ticated relationships that are especially use-ful in particle separation. A prominent is-sue with the trials included the formationof rust, requiring the addition of vinegar
1

to counter and forestall the effects. Ulti-mately, the research supported the increasedefficiency and accuracy of 3D DLD mecha-nisms but demonstrated that water is muchless consistent in comparison to corn oil asa separating fluid.
1 Introduction
1.1 Goals
The study focuses on the effectivenessof a 3D DLD system in separating particlesbased on size. 3D DLD is an expansionof two dimensional deterministic lateral dis-placement (2D DLD), a separation methodused in microfluidics. 2D DLD is often usedin binary separation, where it creates twodifferent streams of distinct particles, oftenseparating them by size, shape, texture, ormaterial. However, because of the planarmotion of particles within a 2D DLD set-up, separating more than two different typesof particles in a single fluid is extremely dif-ficult and inaccurate.
The primary purpose of the experimentis to overcome the limitations of 2D DLDby adding a third range of motion for theparticles to move through. In order to ac-complish the task, particles of three differ-ent sizes are sent through a 3D DLD system,and their relative pathways are recorded todetermine the three distinct streams of par-ticles. The 3D DLD system consists ofan obstacle array with long cylindrical rodsplaced in a rectangular grid. The experi-ment is conducted in a macroscopic set-up,which allows for the manipulation of boththe slope angle and the orientation of the ar-ray. This directly relates to a main ambitionof microfluidics as a whole to create a feasi-ble macroscopic model which can be trans-
lated to a microscopic set-up to function inthe same way based on larger scale research.
Another goal of this experiment is tocompare the results of 3D DLD when usedwith water, a low viscosity liquid, with theresults obtained using corn oil, a much moreviscous liquid. Due to water’s low viscos-ity, the system has a higher Reynolds num-ber, and the driving force, specifically grav-ity, has a much more significant effect on themovement of the particles.
1.2 Reasons for Development of3D DLD
A major motivation for the develop-ment of 3D DLD is that it can easily beapplied to the purification of environmentaland biological fluids [1]. One specific ap-plication is separating healthy and diseasedblood cells, which is possible due to blood’slow viscosity and ability to move throughmicrochannels without clogging [1]. An-other advantage to 3D DLD is that it has theability to separate many varieties of parti-cles at a time and to replace the more com-plex and expensive separation methods thatare currently in use. As a result of its simpledesign, 3D DLD has the potential to sepa-rate particles in a large variety of liquids, re-gardless of their composition and viscosity.
2 Background
2.1 MicrofluidicsThe principles of 3D DLD are founded
on microfluidics, which focuses on the ma-nipulation of fluids typically in the rangeof microliters to picoliters through channelnetworks [2]. Microfluidics seeks to con-trol fluid flow on the microscale to provide
2

several advantages, such as increased rangeof capabilities, less material requirements,and more manageable compact units. Mi-crofluidics additionally allows for detectionwith higher resolution and sensitivity, aswell as improved cost efficiency. Exploitingsmaller scale management and establishedcharacteristics of fluids, microfluidic mech-anisms offer increased control and overalleffectiveness. One of the characteristics offluids vital to the principles of microfluidicsand particularly relevant to this research islaminar flow. In laminar flow, fluids flow inparallel, and the only mixing that occurs re-sults from the diffusion of molecules acrossthe interface [2]. All in all, the networks ofchannels capitalizing on the varying proper-ties of liquids and particles in microfluidicsare a key component of separation during3D DLD.
2.2 Methods of Particle Separa-tion
Separation in microfluidics utilizes twodifferent types of methods: active and pas-sive. The sole difference between activemethods and passive methods is that activemethods involve the use of external fieldsto drive the separative displacement, whilepassive methods do not. Active methodsinclude dielectrophoresis, magnetophoresis,and acoustophoresis, implementing electriccharges, magnetic fields, and ultrasoundwaves, respectively, to separate particles.While active methods hone in on flow fieldfractionation, passive methods incorporatehydrodynamics and particle-solid interac-tions based on inertial motion as a means toseparate particles within the fluidic system[1].
Deterministic lateral displacementserves as one passive method among other
inertial microfluidic techniques, in additionto hydrodynamic filtration and pinchedflow fractionation. Hydrodynamic filtrationwithdraws a small amount of liquid froma mainstream to align particles with sidebranch channels [3], and pinched flow frac-tionation introduces particles to a pinchedsegment where they are isolated with aspreading flow profile [4]. 3D DLD drawson the results of the various methods toimprove upon prior techniques and optimizeefficiency and accuracy in separation.
2.3 Two Dimensional Determin-istic Lateral Displacement
The most basic form of deterministiclateral displacement implements two rangesof motion along the x-axis and y-axis. Themain focus of the separation technique is tocreate equivalent migration paths using lam-inar flow to process particles through an ar-ray of obstacles. A set of obstacles is ar-ranged on one plane, and each successiverow of obstacles is shifted horizontally by asteady factor: ∆λ , where λ is the center-to-center distance between obstacles [5]. Ide-ally, in 2D DLD, particles experience a con-sistent routine of motion as they progressthrough the gaps between obstacles. Theroutine of motion, developed by each spe-cific particle as it passes through the ar-ray, varies depending on individual proper-ties, thereby contributing a key componentto particle separation utilizing 2D DLD. Theultimate goal is to understand various parti-cle interactions with the array and take ad-vantage of them within the context of char-acteristic separation in order to improve thefunctionality of that separation.
Compared to other sorting methods,2D DLD offers various crucial advantages.Unlike other systems, it does not depend on
3

diffusion or multipath averaging, eliminat-ing the randomness and presenting a highlydeterministic event. Additionally, DLD ismuch less susceptible to clogging, which isespecially useful in biological settings andallows for continuous particle separation.
However, the efficiency of the deter-ministic lateral displacement method canstill be further maximized. One of the ar-eas for improvement is precision. Although2D DLD is far more exact compared toother separation techniques, there still re-mains a fair margin of error. Random dif-fusion across streamlines continues to mod-erately degrade resolution. Although highflow speeds would minimize the issue, sepa-ration in a 2D DLD system functions best atlow flow speeds. Furthermore, the systemsare not immune to jamming and cannot sup-port non spherical particles without utilizingcomplicated post structures. There is muchroom for deterministic lateral displacementmethods to be further researched, consoli-dated, and ultimately finalized.
2.4 Overall ConceptThe deterministic lateral displacement
is formed using cylindrical obstacles to af-fect the in-plane and out-of-plane motion ofparticles. The motion is altered by two an-gles: a rotation angle and the slope angle.Therefore, the gravitational force, whichdrives each particle through the system, be-comes a three dimensional vector basedon the two angles. The particles’ interac-tions with the rods are calculated in three-dimensions due to the gravitational force,thus creating 3D DLD [6].
For 3D DLD, the forcing angle α , de-fined as the angle between the particle pathvector and the z-axis in the yz-plane, isbased on both the rotation and slope angle.
Therefore, the combination of the two an-gles would allow for three separate criticalangles to be found for three different par-ticles. When a certain size particle’s criti-cal angle is below the forcing angle, it willexperience locked motion. If the other twoparticles have greater critical angles than thesame forcing angle, the three dimensionalgeometry allows for the two other particlesto be separated by their out-of-plane motionin the xz-plane, allowing for more speci-ficity than 2D DLD [1].
2.5 Collision InteractionsThe collision model assumes two dif-
ferent types of interactions with the posts:purely hydrodynamic or physical contact.Purely hydrodynamic interactions describeinteractions in which the displacement go-ing into the collision is equivalent to the dis-placement out. For the touching collision,the two displacements will be asymmetrical,with the position at which the particle existsthe apparatus being set at one specific value[7]. For each given interaction, the particletrajectory is considered either reversible orirreversible. A particle’s trajectory is con-sidered reversible in scenarios where the ob-stacle does not affect the particle’s intendedmotion. However, for each irreversible col-lision, there exists a critical offset which dif-fers from the initial offset prior to interac-tion with an obstacle, giving rise to a net lat-eral displacement necessary for particle sep-aration [7].
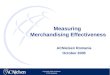
2.6 Types of MotionThe particles exhibit two types of mo-
tion as they travel through the rods: zigzagand locked (see Figure 1). The two formsof motion allow for the separation of parti-
4

cles, as they create two different streams andpoints of exit from the cylindrical array.
Figure 1: Adapted from [1]. Particle motionprojected onto the yz-plane shows the migra-tion angle β and the forcing angle α . The redparticle moves in locked mode and is confinedto a single column, whereas the blue particlemoves in zigzag mode and travels across mul-tiple columns.
Both models of motion are made pos-sible by the phenomenon called directionallocking, where if the force angle is less thana specific value, known as the critical an-gle, the particles will follow the array ofpoles, creating a diagonal path. Directionallocking is due to the touching force, whereall particles will exit the collision at the ex-act same point, creating a specific pathway,which they will follow. When the angle isgreater than or equal to the specific criticalangle, the particles will bounce around andfollow a zigzag pattern similar to a pinballmachine [7].
2.7 TheoryFor the experiment specifically, differ-
ent results are expected from the previous
work of Dr. German Drazer and Siqi Du,as the system uses water as the liquid thatthe particle flows through, rather than cornoil. Corn oil has a much higher densityand therefore a much lower Reynolds num-ber. The Reynolds number is a measure-ment of turbulence within a system, andplays a significant role in the inertia of theparticles. The Reynolds number also plays arole in the Navier-Stokes Equations, whichdescribes the motion of a particle in a fluid.The Reynolds number measures the propor-tions of the viscous forces to inertial forcesacting on a particle traversing the system.It helps to indicate above which values theparticle will experience turbulent flow andbelow which it will experience laminar flowthrough the system. With water having alower density and higher Reynolds number,a higher degree of chaos is expected, whichmay cause the particle to act differentlywithin the system from the system with cornoil. The force angles may have different ef-fects on the particles because there will be adifferent critical velocity value for the parti-cle at which it switches types of movementthrough the system. Therefore, the criticalangle of each particle will differ based onthe fluid it flows through [6].
3 Separation Using ThreeDimensional Determinis-tic Lateral Displacement
3.1 Apparatus Preparation
First, the apparatus that would be usedin the 3D DLD system was assembled.Stainless steel poles, six feet in length, werecut into 15 centimeter rods, which wouldact as the cylindrical obstacles in the array.
5

Two acrylic plates (see Figure 2a) designedin Solidworksr were constructed, each witha 20 x 20 grid of holes. The holes werespaced 4 mm apart, each with a diameter of2 mm. A total of 200 cut rods were theninserted into both acrylic plates in the cen-tral 10 columns of the array, creating a 10 x20 grid of rods. The array plates were thendrilled into place, at a separation of 14 cm,into a square acrylic plate (see Figure 2b).
Another acrylic plate was attached tothe largest base plate by hinges, allowingfor the array to be lifted at various slope an-gles. The square plate and base plate wereloosely screwed together to allow for the ro-tation angle to be adjusted.
A large rectangular acrylic plate wasused as a base plate, and its surface wasmarked with angles in 10◦ increments, rang-ing from 0◦ to 90◦. Another acrylic platewas attached to the base plate by hinges, al-lowing for the entire array to be lifted at var-ious slope angles while still maintaining aflat bottom surface. The square plate withthe array mounted on it and the base platewere loosely screwed together to allow forthe rotation angle to be easily adjusted us-ing manual force (see Figure 2b).
A small hole was drilled into both ofthe unhinged corners of the base plate, andfloss was threaded through and tied to along metal bar. To adjust the slope angle,the floss was either wound, increasing theangle, or unwound, decreasing the angle.Then, a tank with a total volume of one cu-bic foot was filled to a height of eight incheswith tap water, and the completed apparatuswas entirely submerged in the liquid. Thefloss and rod were placed outside the tank,and the floss was made taut, acting as a typeof pulley. In order to adjust the slope angle,the floss was either wound, increasing theangle, or unwound, decreasing the angle.
(a)
(b)
Figure 2: (a) The two acrylic plates holdingthe stainless steel rods were designed usingSolidworksr. (b) The apparatus from the viewof the camera. The slope angle φ is measuredalong the center of the bottom acrylic plate.
6

Figure 3: The assembled rod array and the twoother acrylic plates. The plate in the top left ismarked with angles in increments of 10◦.
3.2 Rust Removal and Preven-tion
After submerging the apparatus in thewater, oxygen bubbles formed on the steelrods of the array, revealing the presence ofan oxidation reaction (see Figure 4c). Theoxidation as a result of the water’s reactionwith the steel thus produced rust, a signif-icant issue to the function of the apparatusas a whole. Due to the change in textureof the rods, particles became attached to thesteel rods upon impact rather than passingthrough the array, dramatically varying theresults of the trials. The presence of rustclearly affected the roughness of the steelrods, thereby altering the path of particlesand leading to inaccuracy.
In order to remove the rust from thesteel rods, the entire apparatus was placedin a vinegar-water solution and cleaned withgauze. To prevent rust from appearingagain, the water in the tank was replacedwith a vinegar-water solution consisting of21.48 L water and 100 mL vinegar, approx-imately a 215:1 water to vinegar ratio. Theaddition of vinegar lowered the slightly ba-sic pH of the water into a neutral range,eliminating the potential for oxidation reac-
(a)
(b)
(c)
Figure 4: (a) The apparatus submerged in wa-ter in the fish tank. A stand was used to makemaintain balance of the tank. (b) Washing theapparatus in a vinegar-water bath to clean therust off of the steel rods. (c) Oxidation of thesteel rods was detectable by the bubbles form-ing around the rods.
7

tions without drastically impacting the vis-cosity. Additionally, the vinegar-water so-lution was monitored closely and changeddaily in an attempt to maintain the cleanli-ness and quality of the liquid.
3.3 Completion of TrialsThe testing process for 3D DLD in-
volved manipulating three different vari-ables: the particle size, the rotation angle,and the slope angle. A total of 44 trialswere completed, consisting of three differ-ent sizes of particles, 22 rotation angles,and two slope angles. The particle diame-ters varied between 1.59◦, 2.88◦, and 3.16◦,with Particle 1 being the smallest and Par-ticle 3 being the largest. In each trial, 20spherical Nylon particles of the predeter-mined size were inserted into the first col-umn to the right of the array, and their mo-tion through the apparatus was recorded.
First, the mechanism constructed fromdental floss attached to the base of the appa-ratus was rewound to the appropriate slopeangle. The trials began by testing a constantslope angle of approximately 28◦ in con-junction with the manipulation of the othertwo variables. Afterwards, another series oftrials mimicked the first set but instead useda slope angle of approximately 37◦. Theslope angles were deliberately chosen at anassumed safe range above the particles’ hy-pothesized critical angles. For each givenslope angle, the rotation angle was adjustedbeginning with 10◦ followed by steadily in-creasing 10◦ intervals until the last trial witha rotation angle of 80◦.
Before each session, a camera was setto record the trial. After visually specifyingwhich particle size was being tested, the 20particles were individually dropped into thearray using tweezers. The particles’ move-
ment within the array and their point of exitwas captured by the camera to allow for fur-ther review and analysis. The type of par-ticle movement, zigzag or locked, was alsoobserved in order to determine the value ofthe critical angle for each particle size at thegiven slope angle. At the smaller rotationangles, the vast majority of particles exhib-ited the properties of zigzag motion. Thelater transition from zigzag to locked mo-tion signaled that the angle of displacementof the particles was approaching the value ofthe critical angle. Therefore, as the rotationangle was increased in increments of 10◦,the particles passed through the intermedi-ary state, where they switched from zigzagto locked motion. During the intermediarystates, an additional trial was conducted ata 5◦ increase in order to find a more accu-rate value for the critical angle and locate amore exact point at which the motion of theparticles underwent the transition.
Once the particles of a certain size hadsufficiently transitioned into locked motion,with the vast majority of the trial particlesfollowing the path along the rods, no moretrials were conducted for that specific sizeand slope angle. Locked motion indicatedthe critical angle had already been achieved,meaning additional trials at larger rotationalangles would have yielded the same result.
3.4 Review and Analysis Process
Once data collection was complete, theanalysis was split into two sections. Thefirst part consisted of motion analysis in twodimensions, specifically within the in-plane(yz) motion.
The forcing angle can be determined interms of the components of gravity on the x-and y-axes (see Figure) as follows [6]:
8

Figure 5: Adapted from [1]. The componentsof the gravitational force in the axis defined bythe apparatus, as well as the slope angle θ androtation angle φ .
gz = gcosθ (1a)gx = gsinθ cosφ (1b)gy = gsinθ sinφ (1c)
gy/gz = tanα = tanθ sinφ (2)
The entrance and exit points of eachparticle in the array were recorded. Com-pilation of the row and column exit data en-abled estimation of the critical angle for ini-tial separation of particles into two streams,one containing a particle of one size andthe other containing particles of the two re-maining sizes. Three different critical an-gles were calculated for each slope angle,one corresponding to each specific particlesize. The exit point was also used to findthe migration angle of each particle, whichwas calculated by:
β = arctanCR
(3)
where C is the number of columns thatthe particle traversed and R is the number ofrows that the particle traversed.
The second part of analysis consistedof video analysis of particle motion in thexy-plane. Each trial was videotaped indi-vidually, with a total of twenty particles pertrial. The camera was positioned parallel tothe top of the apparatus so that the videocould later be analyzed digitally in order todetermine the path of the particles. Fur-thermore, the distance traveled by the par-ticles in the x- and z-directions allowed foradditional separation of the particles whichwere indistinguishable in the xz-plane anal-ysis. Comparing the out-of-plane motionwas accomplished by projecting the parti-cle path vector in the xy-plane onto the x-axis and taking the magnitude of that vector.Videos were filtered after compilation fromthe camera, and a program written in MAT-LAB was used to generate frames from eachvideo. Every fifth frame was saved as animage, and all saved images from the samevideo were saved into a folder with a uniquevideo ID. The images were then further fil-tered so that the final image sequences con-sisted of only the frames showing the par-ticles entering and exiting the grid. Thedata was then collected by manually ana-lyzing the images in an open source imageprocessing software, ImageJ, using manualtracking. The manual tracking process foreach video sequence recorded the path vec-tor of each particle, as well as the vector inthe x-direction along the steel rods. In or-der to convert the projection length calcu-lated by the ImageJ tracking from pixels tomillimeters, another standard vector span-ning the distance between four steel rodswas recorded for each video. The length ofthis vector, which was known to be 18 mm,was then used to scale the projection length
9

into millimeters. The particle’s displace-ment along the x-axis could then be calcu-lated by the projection equation:
|projbx|=(
x ·b|x|
)(18mm|s|
)(4)
where x represents the particle’s pathvector, b represents a directional vectoralong the steel rods, and s represents thestandard vector.
4 Results and Discussion
4.1 Tracking Particle MotionThrough Steel Rods
The out-of-plane motion of each par-ticle was recorded by the row or columnwhich the particle exited from at the end ofeach run, and the motion in the y-directionwas tracked by the video recording. Withinthe steel rod grid, two modes of particlemotion were evident. Initially, the particlemoved in zigzag motion, in which it fol-lowed the direction of the gravitational forcepulling down on it, thus following a gen-erally downwards path that spanned multi-ple columns and crossed a large portion ofthe array. The particles usually exited onthe side of the array or in one of the left-most columns at the bottom of the array.Particles may also travel in locked motion,following the direction of the lattice ratherthan that of gravity. Particles in locked mo-tion moved through all nineteen rows of lat-tice but stayed strictly within the first col-umn. The critical angle was the angle atwhich particles of a certain size switchedfrom zigzag mode to locked mode and wasthe primary method of separation in two di-mensions. As the rotation angle increased in
10◦ increments, the forcing angle decreased.Once the forcing angle approached a certainrange bounding the critical angle, the par-ticles’ tendencies to travel in locked modeincreased abruptly.
4.2 Separation Streams in 2DIn order to determine the critical an-
gle, a range was first pinpointed from theexperimental data by calculating the proba-bility of crossing (Pc), defined as the ratioof the number of particles in zigzag motionto the total number of particles in a trial[1][1]. The data showed clear transitions froma very large probability of crossing (Pc =1) to a seemingly unapparent probability ofcrossing zero (Pc = 0) over two or threeconsecutive rotation angles for each particlesize under a fixed slope angle.
Figure 6: The probability of crossing Pc for eachparticle size in different combinations of slopeangles and rotation angles. Trials highlighted ingreen indicate when the particle is traveling inor close to locked mode, and trials highlightedin yellow indicate when the particle is travelingin zigzag mode. The trial highlighted in red in-dicates a potentially faulty result.
Experimentally determined ranges forthe critical angle α of a certain particlesize can be found by taking the corre-sponding forcing angles of the trials wherePc most closely bound 0.5. For a slopeangle of 28◦ and particles of diameter1.59 mm, 2.38 mm, and 3.16 mm the re-spective ranges for α are:
10

10.3◦ < α < 14.9◦
18.9◦ < α < 21.3◦
21.3◦ < α < 26.7◦
For a slope angle of 37◦ and parti-cles of diameter 1.59 mm, 2.38 mm, and3.16 mm the respective ranges for α are:
7.5◦ < α < 14.5◦
14.5◦ < α < 17.7◦
20.6◦ < α < 30.0◦
Figure 7: The probability of crossing Pc againstthe forcing angle α . Different particle sizes aremarked by different colors and shapes.
Plotting Pc against forcing angles andisolating the transition stage trials producesa linear regression. The regression enablesthe estimation of the critical angle, deter-mined by the value of the forcing anglewhen the probability of crossing is 0.5The graph also shows a distinct jump in Pc,indicating that the transition between modesoccurs at a specific range of angles for eachparticle. The graph also shows that thecritical angle tends to increase as particlesize increases, which is consistent withthe previous experiment using corn oil [1].The estimated critical angle for particlesof 1.59 mm, 2.38 mm, and 3.16 mm are
respectively:
Particle Size Critical Angle in Water1.59 mm 11.6◦±2.3◦
2.38 mm 19.8◦±1.6◦
3.16 mm 25.4◦±2.1◦
The estimated critical angles for thesame sizes of particles in corn oil are respec-tively [1]:
Particle Size Critical Angle in Corn Oil1.59 mm 6.7◦±1.7◦
2.38 mm 10.0◦±1.5◦
3.16 mm 12.6◦±1.7◦
Figure 8: The migration angle β as a function ofthe forcing angle α for all three particle sizes:1.59 mm, 2.38 mm, and 3.16 mm.
Particle motion may also be studiedby plotting the migration angle β againstthe forcing angle α , which shows that theparticles of each size begin to move inzigzag motion only after the respective crit-ical angle, which is consistent with the par-ticle motion exhibited in oil [1]. With afew exceptions, particles traveling at forc-ing angles less than the critical angle exhibitlocked motion, with β = 0◦.
11

4.3 Separating Particles in ThreeDimensions
Further separation of the particles inthe third dimension is done in two planes.First, the projection of the particle motionvector in the xy-plane onto the x-axis is de-termined. The projection, or the particle’smovement along the x-axis (∆x), can be nor-malized along the particle displacement inthe z-axis (∆z) to obtain ∆x/∆z. The ratiois effectively describing the particle’s move-ment in the xz-plane. Plotting ∆x/∆z as afunction of the forcing angle α allows forfurther separation of particles locked withinthe same column, a motion that would beindistinguishable in 2D DLD.
(a)
(b)
Figure 9: The xz-plane motion graphed as afunction of the forcing angle α for slope anglesof (a) 28◦, and (b) 37◦.
Figure 9 shows that in the xy-plane,there existed critical angles in which oneparticle size was split into a separate streambut the remaining two particle sizes still ex-perienced zigzag motion, highlighting theability of the experiment to choose specificparticles to separate into distinct streams.While the in-plane motion of the parti-cles could not have been distinguished, Fig-ure 10 shows that their out-of-plane move-ments were clearly distinct. For instance,at a forcing angle of 22◦, particles of di-ameter 3.16 mm would be separated intoa zigzag stream, but particles of diameter1.59 mm and 2.38 mm would both remainin the same locked stream in the 2D DLDplane. However, Fig. depicts a clear differ-ence in ∆x/∆z between particles of diameter1.59 mm and 2.38 mm, thus splitting theminto separate streams.
4.4 Comparing Particle Motionin Water to Particle Motionin Corn Oil
The critical angles for water are higherfor each particle size, which was expectedsince the Reynolds number for water is sig-nificantly higher than that of oil. The differ-ence in critical angle indicates that the grav-itational force pulling on the particles metless inertial resistance in water than in oil,and the greater perturbations within the wa-ter allow the particles to remain in zigzagmotion at greater forcing angles. Con-versely, the greater inertial forces presentin oil, which has a higher viscosity, mini-mize the perturbations caused by the forceof gravity moving the particle and lockingthe particle within the steel rod lattice moreeasily.
12

(a)
(b)
(c)
Figure 10: The migration angle β as a function of the forcing angle α for particles of diameter (a)1.59 mm (b) 2.38 mm (c) 3.16 mm. Noticeable plateaus in migration angle are observed for certainintervals of the forcing angle.
13

While the critical angles were greaterfor particles traveling through water than inoil, the general separation mechanism of 3DDLD functioned similarly in both fluids. Inparticular, an individual analysis of the mi-gration angle β against the forcing angle α
of each particle shows the directional lock-ing behavior, defined as the occurrence of afixed migration angle for a certain intervalof forcing angles [1]. Similar to oil, the di-rectional locking intervals decrease in num-ber but increase in range as particle size in-creases. The definition of the plateaus, how-ever, is much clearer in the data for oil thanthat of water. Additionally, it is evident thatparticles have migration angles of approxi-mately 0◦ at forcing angles less than the crit-ical angle, which suggests that the turbulentnature of water does not significantly alterthe separation mechanism from that in oil.
4.5 Sources of Error
During the analysis of the collecteddata, discrepancies were found in select tri-als concerning the type of movement andthe migration angle of particles. The er-ror could be attributed to multiple possiblesources of error. First, due to the origi-nal rusting of the steel rods in the array, arice vinegar-water solution was composedto clean the array and prevent future rust.The vinegar present in the solution had aslightly higher viscosity than water, whichcould have affected the motion of the par-ticles. In addition, the rust may have ad-justed the texture of the rods. Such textu-ral change would also have had an effect onthe movement of the particles, as they couldhave stuck to the rods or changed their tra-jectory due to increased friction. The vine-gar solution also posed a possible problembecause the liquid in the tank needed to be
changed every day that new trials were com-pleted. As a result, each new day of trialsmay have had a slightly different viscosityliquid to travel through.
Another potential source of error isthe initial dropping of the particles into thearray. Each particle was placed into theapparatus using tweezers, and as a result,they did not all enter with the same initialforce or velocity. Small changes in how thetweezers were held or the location of thetweezers could have affected the overall mo-tion of the particles as well. Human erroris also present in the analysis of the parti-cles using ImageJ. Due to the manual track-ing process that was employed, some of themotion vectors may have been inaccurate.Some of the trial video recordings were notcompletely in focus, and a small speck, airbubble, or reflection in the tank could havebeen mistaken for the particle, leading to anincorrect reading.
5 Conclusions
As particles were placed into the ar-ray and passed through the series of obsta-cles, two types of motion were observed,zigzag and locked, which enable particleseparation. Generally, particles demon-strated more inclination towards locked mo-tion as the forcing angle approached the crit-ical angle, often with greater rotation an-gles. The experimental data supported th,revealing that the probability of crossing de-creased suddenly from one to zero over thespan of the trials. After calculating criticalangles for given particle sizes according totheir forcing angles and plotting the proba-bility of crossing against forcing angles iso-lated from the transition stage, a linear re-gression was observed. This further distin-
14

guished that the critical angle typically in-creases as particle size increases, stronglysuggesting that water serves as a successfulseparation medium. Aside from the com-parison of forcing and critical angles, therelationship between forcing and migrationangles also revealed important notes con-cerning the data sets, namely, that particlestended to lock at forcing angles less than thecritical angles. In general, particles mov-ing according to forcing angles less than thecritical angle exhibited locked motion.
Furthermore, utilizing the three dimen-sional coordinate system enabled greaterseparation capabilities in a given column,successfully expanding the range of motionand accuracy in comparison to 2D DLD.While there still remains areas for improve-ment in sorting particles according to DLD,such as in cases where two particles expe-rience the same type of motion, 3D DLDpermits analysis in two planes of separationwith distinct displacements. Additionally,appealing to one of the primary goals of theresearch to identify discontinuities betweenoil and water used in 3D DLD, less iner-tial resistance was met in water due to lowerviscosity provided for higher critical angles,also allowing zigzag motion in greater forc-ing angles. However, the difference in in-ertial resistance did not have a significantimpact on the mechanism as a whole, asproven within the overall directional lock-ing behavior of the particles. Even so, oilexhibited more consistent separation, espe-cially when separation involved smaller par-ticle sizes. Possible sources of error includematerial malfunctions, particularly viscosityand trial reset discrepancies regarding thewater-vinegar solution and steel rod rust-ing, precision in original particle placementwithin the array, and human error concern-ing analysis, especially when videos track-
ing particles were blurry.
Acknowledgments
This paper and knowledge acquiredthrough research would not have been pos-sible without the extensive time and effortcontributed by a great account of peopleand institutions. Specifically, the authors ofthis paper would like to express thoroughgratitude to all their mentors. The specialefforts of mentor and PhD candidate SiqiDu were invaluable to the experimental pro-cess and deep analysis required for success,and the authors would like to further ac-knowledge with great appreciation his con-siderable help, support, and enthusiasm inall project matters. Additionally, they ex-tend their thanks to Residential TeachingAssistant Alissa Persad for her facilitationin review and overall focus. Furthermore,the authors express the utmost gratitude toDr. German Drazer for allowing the use ofhis facilities, without which this opportunitywould not be possible.
They would also like to extend thanksto all the staff of the Governor’s School ofEngineering and Technology for not onlythe materials and basis creating thie re-search project, but also the remarkable ex-perience as a whole. Their hard workand detailed planning provided the foun-dation for all the studies described withinthe paper. Particularly, the authors wouldlike to express deep appreciation to DeanJean Patrick Antoine and Dean Ilene Rosen,without whom the research would not havebeen pursued. Finally, they respectfully ac-knowledge the generous donations of thesponsors of the Governor’s School of En-gineering, enabling the pursuit of interestsin science, mathematics, engineering, and
15

technology: Rutgers, the State University ofNew Jersey; Rutgers School of Engineering;South Jersey Industries, Inc.; Printrbot; andLockheed Martin.
References
[1] S. Du and G. Drazer, “Deterministicseparation of suspended particles in areconfigurable array,” J. Micromech.Microeng., vol. 25, pp. 1-8, Oct.Month, 2015.
[2] G. M. Whitesides, “The origins and fu-ture of microfluidics,” NATURE, vol.442, no. x, pp. 368-373, July 2006.
[3] M. Yamada and M. Seki, “Hydrody-namic filtration for on-chip particleconcentration and classification usingmicrofluidics,” Lab on a Chip, vol. 5,pp. 1233-1239, Sept. 2005.
[4] M. Yamada et al., “Pinched Flow Frac-tionation: Continuous Size Separationof Particles Utilizing a Laminar FlowProfile in a Pinched Microchannel,”Anal. Chem., vol. 76, pp. 5465-5471,Sept. 2004.
[5] L. R. Huang et al., “Continuous Parti-cle Separation Through DeterministicLateral Displacement,” Science, vol.304, pp. 987-990, Dec. 2003.
[6] S. Du and G. Drazer, “Gravity drivendeterministic lateral displacement forsuspended particles in a 3D obstaclearray,” unpublished.
[7] T. J. Bowman et al., “Inertia and scal-ing in deterministic lateral displace-ment,” Biomicrofluidics, vol. 7, pp. 1-14, Dec. 2013.
16