Embed Size (px)
DESCRIPTION
Mecanica
Citation preview
FíSlCA
Mecánica

Doctor Eliezer Braun Profesor titular del Departamento de Física Universidad Autónoma MetropoIitana/lztapalapa Profesor titular de la Facultad de Ciencias Universidad Nacional Autónoma de México
FlSlCA 1
Mecánica
Eliezer Braun
TRILLAS @] EDITORIAL 1 Mextco. Argenma España Colornbla PuerloRico Venezuela
Prólogo
E l presente texto de mecánica corresponde a los primeros cursos de f ís ica que se imparten en las escuelas superiores en diversas carreras técni- cas y c ient í f icas como ingenierías, quimica, f ís ica, matemát icas, etcétera.
E l tex to se diseñó con base en las característ icas específ icas de los estu- diantes mexicanos. En part icular estamos conscientes de algunas di f icul- tades que t ienen los a lumnos, como por e jemplo, las re lacionadas con las manipulaciones matemáticas necesarias. Por este motivo, las operaciones matemát icas se expl ican con mucho detenimiento: despejes, resolución de diversas ecuaciones algebraicas, ut i l ización de resul tados de geometr ía , t r igonometr ía , cá lcu lo d i ferenc ia l e in tegra l , e tc . Para e l lo se presentan, tanto en una ser ie de recuadros como en apéndices recordato- rios, los resul tados matemát icos que se van a u t i l i za r en e l momento correspondiente Aquel los lectores que dominen las matemát icas pueden pasar, en cada caso, d i rectamente a la solución y su t ra tamiento f ís ico.
Se hn procurado hacer énfasis en e l contenido f ís ico de los temas por t ra tar . Así, antes de dar a los temas e¡ t ra tamien to ma temát i co se discute el contenido f is ico y en a lgunas ocasiones se logran v is lumbrar a lgunas de las características de la solución, io cua l no s ign i f i ca que se pueda sosla- yar e l t ra tamiento matemát ico. Poster iormente, una vez obtenida la so lu- ción, esta se anal iza desde el punto de v ista f ís ico.
Cada vez que se ob tenga un resu l tado matemát ico es impor tan te que e l a lumno adqu iera la d isc ip l ina de ana l i zar lo y en tender su signif icado. En par t icu lar , es impor tan te ver i f i car la congruencia d imensional de las expresiones que haya obrenido y anal izar. desde el punto de v ista f ís ico, s i los resultados t ienen sentido.
E l a l u m n o se debe dar cuenta de que el desarrol lo de la mecánica par te de c ier tos pr inc ip ios que sor), esencialmente, las leyes de Newton, a part ir de las cuales se cons t ruye t odo lo demás.
En el texto se resuelven, con mucho deta l le , un número cons iderable de e jerc ic ios que se consideran t ip icos. Asimismo, a l f inal de cada capítulo se presenta una ser ie de problemas para que el a lumno los resuelva. Además, a l f ina l de l l ib ro se muestran los resultados de casi todos los problemas.
En lugares estratégicos se presenta una serie de recuadros en los que se hacen comentar ios pert inentes acerca de los temas t ratados. Los vectores que representan di ferentes cant idades f ís icas, como velocidad, acelera-
5
6 P R ~ L O G O
ción, fuerza, etc., se representan gráf icamente por medio de d i ferentes puntas de f lecha y10 grosores.
Dada l a l im i tac ión en la extens ión de l l i b ro no se han podido desarro l lar exhaust ivamente a lgunos temas que, por su impor tanc ia , lo amer i tan . Se ha aprovechado un problemar io que va para le lo a este l ibro, en donde se ampl ían y complementan los temas aquí t ra tados.
A con t inuac ión se proporcionan en forma breve algunas característ icas de cada uno de los capí tu los de la obra .
En el cap í tu lo 1 se presentan los conceptos de medidas, d imensiones y unidades. Se hace énfasis en el anál isis dimensional, el cual es m u y ú t i l a l anal izar tanto las ecuaciones como las expresiones que se obtengan. Ade- más, se repasan algunos temas de álgebra, út i les en el desarrol lo del texto.
En el capítulo 2 se desarrol la, con brevedad, e l tema de los vectores, q u e es necesar io dominar para e l estud io de la mecánica. Se inc luyen los productos de vectores, tanto escalar como vector ia l .
En seguida se in ic ia e l estud io de la c inemát ica, a la que se ded ican los capítulos, 3, 4 y 5. La exper iencia nos ha mostrado que es m u y i m p o r t a n t e i r con cautela en e l desarrol lo de conceptos que son muy di f íc i les, como ve loc idad y acelerac ión instantáneas. Hay que recordar que los gr iegos no los entendieron y por e l lo no pud ie ron desar ro l la r la c ienc ia que, de hecho, quedó estancada hasta e l s ig lo X V I I en que Ca l i leo , Newton y otros pudieron entender estos conceptos.
En el cap í tu lo 3 se ana l izan los conceptos de t rayector ia , ve loc idad y aceleración, en el sistema más senci l lo posible que es un pun to mov iéndo- se en una d imensión. La idea es desarrol lar los conceptos adecuados para la descr ipc ión de los movimientos. Además, se hace ver la necesidad d e def in i r las cant idades instantáneas correspondientes que dan lugar a l uso d e las derivadas. Se hace énfasis en e l hecho de que, conocida la t rayecto- ria, se pueden encont ra r la ve loc idad y la aceleración.
En e l cap í tu lo 4 se t ra ta, en una d imensión, e l problema inverso a l estu- d i a d o e n e l c a p í t u l o 3, a saber , de determinar la t rayector ia de una part ícula, conocida su aceleración. Esto da lugar a l uso de las integrales.
En e l cap í tu lo 5 se usan los conceptos aprendidos en los dos capítulos anter iores para e l caso de l movimiento en una d imensión, a f in de hacer la descr ipc ión de l movimiento de un punto en dos d imensiones. Para e l lo se ut i l iza un pr inc ip io f ís ico obtenido de la exper ienc ia: e l de la superposi - c ión de efectos. En este curso se t ra ta muy b revemen te l a c inemát i ca en tres dimensiones. Las ideas desarrolladas en dos dimensiones son directa- mente trasladables al caso de tres dimensiones.
En los capí tu los 6, 7 y 8 se desarro l la la d inámica de una masa puntual . En e l capí tu lo 6 se discuten las bases de la d inámica, que son las t res leyes de Newton. Para este e fecto es de par t icu lar impor tanc ia e l concepto de s istema de referencia inercial .
El cap í tu lo 7 se dedica a presentar una gran var iedad de ap l icac iones de las leyes de Newton. Se presentan en la forma de e jerc ic ios resuel tos con e l p ropós i to de que e l a lumno s is temat ice la ap l i cac ión de las leyes de Newton.
E l cap í tu lo 8 se ded ica a l t ema de t raba jo y energía. Aquí se desarrol la e l pr inc ip io de conservac ión de la energía mecánica.
En e l capí tu lo 9 se estudia la mecánica de var ias part ículas, part iendo de los conoc imien tos adqu i r idos en los capí tu los anter iores. De manera sistemática se va mot ivando la neces idad de in t roduc i r conceptos ad i -
PRbLOGO 7
cionales como, por e jemplo, e l centro de masa. Además se presenta el p r inc ip io de conservac ión de l momento l inea l , que se apl ica a la so luc ión de diversos problemas de interés como el de la col is ión de dos part ículas.
En e l capí tu lo 10 se in t roducen o t ros conceptos , como e l de momento angular y torca de una fuerza, que resul tan ser út i les en la descr ipc ión de los movimientos de sistemas de varias partículas: Asimismo, se en- cuentra y se apl ica el pr incipio de la conservación del momento angular. Se hace énfasis en el hecho de que los pr inc ip ios de conservac ión obtenidos en los capí tu los 9 y 10 son consecuencia directa de las leyes de Newton.
Los resul tados que se obt ienen en los capítulos 9 y 10 son completa- mente generales, vál idos para cualquier sistema de varias partículas, ya sea discreto o cont inuo.
En los ú l t imos cuat ro cap í tu los se estudian apl icaciones de los concep- tos generales desarrol lados hasta este punto. Los capí tu los 13 y 14 son in- dependientes, por lo que se pueden estudiar en e l orden que convenga.
En e l cap í tu lo I1 se analiza, con base en lo aprendido anter iormente, un s istema de var ias part ículas muy importante; a saber e l cuerpo r íg ido. Se estudian a lgunos t ipos de movimientos para cuerpos r íg idos par t icu lares como p lacas de lgadas y cuerpos simétr icos. Esta restr icción se debe a que la descr ipción para cuerpos más generales requiere de elementos matemá- t icos más avanzados.
E l capí tu lo 12 t ra ta, como caso par t icu lar de los temas considerados en e l cap í tu lo 11, la estát ica de cuerpos rígidos.
E l capítulo 13 estudia a lgunas característ icas del fenómeno de las osci- laciones en varios sistemas físicos. En par t icu lar se t ra ta e l fenómeno de resonancia, que se presenta en muchas situaciones físicas.
F ina lmente, en e l capí tu lo 14 se t ra ta e l tema de la grav i tac ión. Se p r e senta un breve resumen histór ico sobre las mot ivaciones que tuvieron los c ient í f icos de los siglos XVI y XVII para desarrol lar esta teoría, que consti- tuye una de las hazañas cumbres del pensamiento humano.

Indice
Prólogo
de c o n t e n i d o
Cap. 1. Unidades y dimensiones 1 . l . Mediciones. Unidades. Sistemas de unidades, 13 1.2. Unidades derivadas, 15. 1.3. Dimensiones. Análisis dimensional, 20.
Problemas, 22.
Cap. 2. Vectores 2.1. Escalares. Vectores, 24. 2.2. Suma y resta de vectores, 26. 2.3. Producto (cociente) de un vector por (entre) un escalar, 29 2.4. Componentes de un vector, 31 2.5. Producto escalar de dos vectores, 38. 2.6. Producto vectorial de dos vectores, 41
Problemas, 44.
Cap. 3. Cinemática de una partícula. Una dimensión (I) 3.1. Movimiento de una partícula en una dimensibn, 47 3.2. Posición de una partícula, 47. 3.3. Velocidad media de una partícula, 49. 3.4. Velocidad instantánea de una partícula, 55. 3.5. Aceleración de una partícula, 60.
Problemas, 69.
Cap. 4. Cinemática de una partícula. Una dimensión (It) 4.1. Movimiento uniforme, 72. 4.2. La posición x(t) en un movimiento arbitrario, 75 4.3. Movimiento uniformemente acelerado, 81 4.4. Caída libre, 86.
Problemas. 92.
Cap. 5. Cinemática de una partícula. Dos dimensiones 5.1. Principio de superposición de efectos, 95. 5.2. Posición, velocidad y aceleración de un cuerpo, 96 5.3. Aplicaciones, 99. 5.4. Movimiento circular, 108.
5
1 3
24
47
72
95
9
10 iNDlCE DE CONTENIDO
5.5. Movimiento circular no uniforme, 114. 5.6. Movimiento en tres dimensiones, 11 5.
Problemas, 11 6.
Cap. 6. Las leyes de Newton 6.1. Movimiento relativo, 122. 6.2. Leyes de Newton, 124. 6.3. Primera ley de Newton, 124. 6.4. Segunda ley de Newton, 125. 6.5. Tercera ley de Newton, 126. 6.6. Comentarios, 127.
Problemas, 127.
Cap. 7. Aplicaciones de las leyes de Newton 7.1. Algunas aplicaciones de las leyes de Newton, 128. 7.2. Fricción, 139. 7.3. Algunas consideraciones sobre las fuerzas de fricción y de
7.4. Movimiento circular, 146. constricción, 145.
Problemas, 149.
Cap. 8. Trabajo y energía 8.1. Trabajo, 153. 8.2. Energía cinética, 158. 8.3. Fuerzas conservativas. Energía potencial, 159. 8.4. Algunas aplicaciones, 165. 8.5. Potencia, 170. 8.6. Más aplicaciones, 173.
Problemas, 175.
Cap. 9. Mecánica de varias partículas. Conservación del momento lineal. Centros de masa 9.1. Momento lineal de una particula, 180. 9.2. Momento l ineal de varias partículas, 181. 9.3. Centros de masa, 184. 9.4. Centros de masa de cuerpos continuos, 190. 9.5. Conservación del momento lineal, 205. 9.6. Colisiones, 212.
Problemas, 219.
Cap. IO. Momento angular. Torca 10.1. Momento angular y torca. Caso de una partícula, 225. 10.2. Momento angular de un sistema de partículas, 238. 10.3. Cantidades referidas a l centro de masa del sistema, 242.
Problemas, 244.
Cap. 11. Cuerpo rígido 11 .l. : Movimientos de un cuerpo rígido, 250. 11.2. Cinemática de rotación de un cuerpo rígido, 251. 11.3. Movimiento de placas delgadas con un punto fijo, 254. 11.4. Momentos de inercia de placas delgadas, 259. 11.5. Teorema de ejes paralelos, 261.
122
128
153
180
225
250
11.6. Dinámica de placas delgadas, 265. 11.7. Dinámica de cuerpos rígidos con un eje de simetría fijo, 272 11.8. Momentos de inercia de cuerpos simétricos, 276. 11.9. Traslación y rotación de cuerpos rígidos, 278.
Problemas, 290.
INDICE DE CONTENIDO 11
Cap. 12. Estática 12.1. Estática, 297. 12.2. Aplicaciones, 299.
Problewas, 31 3.
Cap. 13. Oscilaciones y vibraciones 13.1. Vibraciones, 320. 13.2. Resorte, 320. 13.3. Resorte. Trayectoria, 324. 13.4. Energía, 328. 13.5. Oscilaciones amortiguadas, 331. 13.6. Oscilaciones forzadas. Resonancia, 333. 13.7. Oscilaciones forzadas con amortiguación, 337. 13.8. Potencia absorbida por el cuerpo en presencia de una
13.9. Aplicaciones, 344. 13.10. Otros sistemas que vibran, 353.
fuerza externa, 341.
Problemas, 356.
Cap. 14. La ley de la gravitación universal 14.1 Ley de la gravitación universal, 361. 14.2. Algunas aplicaciones, 363. 14.3. Leyes de Kepler, 365. 14.4. Energía, 370. 14.5. Caso de una masa distribuida uniformemente, 371. 14.6. Algunas otras aplicaciones, 374.
Problemas, 375.
Solución de problemas selectos
Apéndices
297
320
361
377
387
399 índice analítico

1.1. MEDICIONES. UNIQADES. SISTEMAS DE UNIDADES
i L J
““ - I ’
I 1
13
14
2.3 millas = 2.3 X I 609.3 m = 3 701.4 m
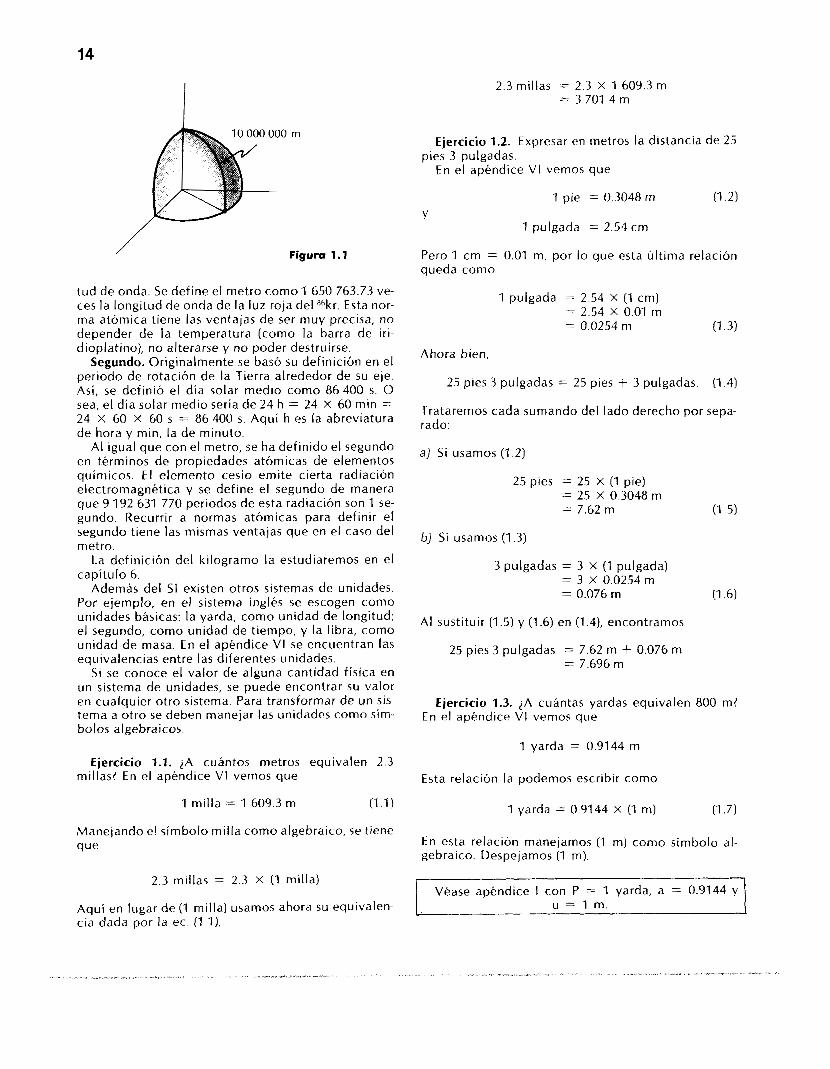
/ Figura 1.1
tud de onda. Se define el metro como 1 650 763.73 ve- ces la longitud de onda de la luz roja del 8hkr. Esta nor- ma atómica tiene las ventajas de ser muy precisa, no depender de la temperatura (como la barra de iri- dioplatino), no alterarse y no poder destruirse.
Segundo. Originalmente se basó su definición en el periodo de rotación de la Tierra alrededor de su eje. Así, se definió el dia solar medio como 86 400 s. O sea, el día solar medio seria de 24 h = 24 x 60 min = 24 X 60 x 60 S = 86 400 s. Aquí h es la abreviatura de hora y min, la de minuto.
AI igual que con el metro, se ha definido el segundo en términos de propiedades atómicas de elementos químicos. E l elemento cesio emite cierta radiación electromagnética y se define el segundo de manera que 9 192 631 770 periodos de esta radiación son 1 se- gundo. Recurrir a normas atómicas para definir e l segundo tiene las mismas ventajas que en el caso del metro.
La definición del kilogramo la estudiaremos en el capítulo 6.
Además del SI existen otros sistemas de unidades. Por ejemplo, en el sistema inglés se escogen como unidades básicas: la yarda, como unidad de longitud; el segundo, como unidad de tiempo, y la libra, como unidad de masa. En el apéndice VI se encuentran las equivalencias entre las diferentes unidades.
S i se conoce el valor de alguna cantidad física en un sistema de unidades, se puede encontrar su valor en cualquier otro sistema. Para transformar de un sis- tema a otro se deben manejar las unidades como sím- bolos algebraicos.
2.3 millas = 2.3 X (1 milla)
Aquí en lugar de (I milla) usamos ahora su equivalen- cia dada por la ec. (l.)),
Ejercicio 1.2. Expresar en metros la distancia de 25
En el apéndice VI vemos que pies 3 pulgadas.
Y 1 pie = 0.3048 m (1 2 )
1 pulgada = 2.54 cm
Pero 1 cm = 0.01 m, por lo que esta última relación queda como
1 pulgada = 2.54 X (I cm) = 2.54 x 0.01 m = 0.0254 m (1.3)
Ahora bien,
25 pies 3 pulgadas = 25 pies + 3 pulgadas. (1.4)
Trataremos cada sumando del lado derecho por sepa- rado:
a) Si usamos (1.2)
25 pies = 25 X (1 pie) = 25 X 0.3048 m = 7.62 m
b] Si usamos (1.3)
3 pulgadas = 3 X (I pulgada) = 3 x 0.0254 m = 0.076 m
AI sustituir (1.5) y (1.6) en (1.41, encontramos
25 pies 3 pulgadas = 7.62 m + 0.076 m = 7.696 m
Ejercicio 1.3. i A cuántas yardas equivalen 800 m? En el apéndice VI vemos que
1 yarda = 0.9144 m
Esta relación la podemos escribir como
1 yarda = 0.9144 X (I m) (1 .7)
En esta relación manejamos (1 m) como simbolo al- gebraico. Despejamos (I m).
Véase apéndice I con P = 1 yarda, a = 0.9144 Y u = l m .
UNIDADES DERIVADAS 15
I m = ___ yarda = 1 .O94 yarda Ejercicio 1.6. Determinar las unidades de la veloci-
Como veremos en el capítulo 3, la velocidad es el En consecuencia, usando (1.8) cociente de una longitud entre un intervalo de tiempo
0.91 44 dad en el SI.
800 m = 800 X 1 m = 800 X I .O94 yarda = 875.2 yardas Por tanto,
velocidad = longitud tiempo
Ejercicio 1.4. i A cuántos segundos equivalen 2 h 16 min 38 S ? unidad de longitud - m
Tenemos que unidad de tiempo S ” (1 .I 2)
velocidad
2 h 1 6 m i n 3 8 ~ = 2 h + 1 6 m i n + 3 8 s (1.9) Eiercicio 1.7. jCuáles son las unidades de la acelera-
Tratamos cada sumando del lado derecho por sepa- Como estudiaremos en el capítulo 3, la aceleración rad0 es el cociente de un cambio de velocidad entre un in-
ci& en el S I ? -
tervalo de tiemDo. Por tanto. a) 2 h = 2 X (1 h) = 2 X 60 min = 120 min
= 120 X (1 min) = 120 X (60 S) = 7 200 S (1 .I O)
bl 16 min = 16 X (1 min) = 16 X 60 S Así, = 960 S (1 .I 1 )
Si sustituimos (1 .IO) y (1.11) en (1.9) nos da
2 h 1 6 m i n 3 8 s = 7200s + 960s + 38s = 8 198 S
1.2. UNIDADES DERIVADAS
Además de las tres cantidades de las que hablamos en la sección anterior (longitud, tiempo y masa), exis- ten en la naturaleza otras cantidades tales como área, volumen, velocidad, aceleración, fuerza, etc. Una ca- racterística de estas cantidades es que sus unidades se pueden obtener a partir de las unidades básicas de longitud, tiempo y masa. A esas unidades se les llama derivadas. Como ejemplo consideremos el área. E l área de un rectángulo es el producto de dos longitu- des (la de cada lado), por tanto, la unidad de área en el SI es el producto de la unidad de longitud de un lado multiplicada por la unidad de longitud del otro lado, es decir, m X m = m2,
aceleración = cambio de velocidad tiempo
-
- - unidad de velocidad unidad de tiempo (1 .I 3)
aceleración
La unidad de velocidad es (mis) (véase. ec. (1.12)) Sustituyendo este resultado en (1 .I 3) se tiene que
u n ~ ~ d ” - m/s
aceleración S
(1 .I 4)
Aquí se utilizó el siguiente resultado algebraico. E l cociente.
(1 .I 5)
Ejercicio 1.8. Obtener la unidad de fuerza en el S1 En el capítulo 6 veremos que
Ejercicio 1.5. Obtener las unidades de volumen en
E l volumen es el producto de tres longitudes. Como el S I . fuerza = masa X aceleración
la unidad de cada longitud es el metro, Por tanto,
(1.16) fuerza masa aceleración

UNIDADES DERIVADAS 17
En la tabla 1.1 se muestran los equivalentes numéri- cos de diversas potencias de diez,
Tabla 1.1 I O O O O = 104 I o00 = 103
100 = 102 10 = 101
1 = 100 0.1 = IO"
0.01 = 1 0 - 2
0.001 = 1 0 - 3 0.0001 = 10-4
Cuando dos números, expresados en notación expo- nencial con la misma base, por ejemplo,
y = a x (1.24) z = aw (1.25)
se mult ip l ican
yz = axaw = ax+w (1.26)
el producto tiene, en la misma base, el exponente igual a la suma de los exponentes de los factores (x + w).
Si los números se dividen,
los exponentes se restan
(1.27)
Ejercicio 1.11. a ) Obtener el producto de y por z s i
Y = 3.2 x 104, z = 4.8 X 105
Usando la ec. (1.26) obtenemos que el producto es
yz = 3.2 X 104 x 4.8 x 105 = (3.2 X 4.8) x (104 X 105) = 15.36 X 104'5
= I ,536 x (101 x 109)
= 15.36 X IO9 = (1.536 X IO) X IO9
y usando otra vez la ec. (1.26)
yz = 1.536 X 101+9 = 1.536 X 1O1O
AI expresar un número en notación exponenciat, se suele escribir el factor que acompaña a 1 0 ' como un número entre 1 y 10. As;, en nuestro caso, tenemos 15.36, que se puede escribir como 1.536 x IO. b) iCuá1 es el cociente y/z?
Usando la ec. (1.27) se encuentra que el cociente es
= 0.667 X IO-' = (6.67 X 10-9 x IO-'
Usando la ec. (1.26)
" Y - Z
6.67 X 10-l-l = 6.67 X
Ejercicio 1.12. Si
a ) jCuá1 es el producto de y con z? Usando la ec. (1.26) obtenemos
yz = 5.6 X X 6.8, X IO5 = (5.6 X 6.8) X X IO5
= 38.08 X IO2 = (3.808 X IO) X IO2 = 3.808 X (IO1 X IO2)
= 38.08 X 10-3'5
Usando de nuevo la ec. (1.26)
yz = 3.808 X = 3.808 x 103
b) iCuál es el cociente de y entre z? Usando la ec. (1.27) encontramos
" y - 5.6 x 10-3 - 5.6 x - - Z 6.8 X IO5 6.8
= 0.824 X = (8.24 X IO-') X 1 O-' = 8.24 X (IO-1 X IO-')
Usando la ec. (1.26)
Regresando al ejercicio 1 .IO a), se puede escribir el resultado (1.20) también como
y el volumen pedido, como
V = 0.785 X 106cm3 = (7.85 X IO-l) X IO6 cm3 = 7.85 X (IO-' X 1061cm3

18 Cap. I . UNIDADES Y DIMENSIONES
Usando la ec. (I ,261
V = 7.85 X cm3 = 7.85 X i o 5 cm3
Ejercicio 1.13. Un cuerpo se mueve con una veloci-
Se da dad de 28 m/s. Expresar esta velocidad en km/h.
m v = 2 8 - (1.28)
S De
1 km = l 0 0 0 m
Véase apéndice I con P = 1 h, a = 3.6 X IO3 y u = (1 S ) .
I s = ' h 3.6 X 103
= 0.2778 X h
Aquí se usó
tenemos que
1 m = 0.001 k m (1.29)
Por otro lado
1 h = 3 600 S = 3 600 X (1 S ) (1.30)
De aquí despejamos (1 S )
Véase apéndice I con P = 1 h, a = 3 600 y u = (1 S )
I s = x l h
= 0.0002778 h (1.31)
Sustituyendo (1.29) y (1.31) en (1.28) se tiene
I m 0.001 km I s 0.0002778 h v = 2 8 X -- - 28 x
- 28 X 0.001 km k m - 0.0002778 h - = 100.8 - h
E l resultado del ejercicio 1 .I3 se puede obtener también usando notación exponencial para las diver- sas cantidades. Hay que destacar que en las ecs. (1.29) y (1.31) aparecen cantidades pequeñas. E s más conve- niente utilizar la notación exponencial.
Ejercicio 1.14. Resolver el ejercicio 1.13 usando no-
En lugar de l a ec. (1.29) se puede escribir (con- tación exponencial.
súltese la tabla 1 . 1 )
1 m = 10-~ km (1.32)
y en lugar de (1.30)
1 h = 3.6 X IO3 S = 3.6 X IO3 X (1 S) (1.33)
De aquí despejamos (1 S)
Así,
1 S = (2.778 X IO-') X 10-3h = 2.778 X (IO" x h
usando la ec. (1.26) se obtiene
1 S = 2.778 X IO" h (I .34)
Este resultado es el mismo dado en la ec. (1.31). Susti- tuyendo (I .32) y (1.34) en (1.28) encontramos que
I m km I s 2.778 x IO-* h v = 2 8 X " - 28 x
28 2.778
- - km h X"
= I 0.08 X 10-3'4 - km h
km k m h h = 10.08 x IO' - - - 100.8 -
Este resultado es el mismo que el obtenido en el ejer- cicio 1.13.
Ejercicio 1.15. Expresar la velocidad de 55 millas/h en km/h.
Se tiene que millas 1 mil la
v = 5 5 ~- - 55 X h h
En el apéndice VI se encuentra que
1 mil la = 1.609 km
Sustituyendo (1.36) en (1.35) nos da
(I ,351
(1.36)
. . ,, ".,, .

UNIDADES DERIVADAS 19
v = 5 5 x 1.609 km h L é a s e apéndice I con P = 1 min, a = 6 X 10 y u = (1 S). I
= 55 X 1.609 - km h
= 88.5 - km h
I s = 6 X 10 x I min
= 0.167 X - 10 X I min
= 0.167 X 10"min
En este ejercicio no hubo necesidad de transformar las unidades de tiempo ya que son las mismas en mi- Ilas/h que en km/h. Lo unico que hubo necesidad de transformar fue millas en km.
Ejercicio 1.16. Transformar la aceleración de 8.3 m/s2 en km/rnin2. 1 S = (1.67 X IO-l) X 10"min
= 1.67 X ( IO" X IO-I) min Tenemos que
m a = 8.3 - = 8.3 X - I m 5.2 1 S2
(1.37)
De la relación
1 min = 60s = 60 X (1 S) (1.38)
despejamos (1 S )
Véase el apéndice I con P = 1 min, a = 60 y u = (1 S).
I s = - rnin = 0.0167 min (1 .39) 60
Elevando al cuadrado ambos lados de la ec. (1.39)
1 S' = (1 S) X (1 S ) = (0.0167 min) X (0.0167 min) = 0.0167 X 0.0167 min X min = 0.000278 m i d
Sustituyendo este valor y la relación (1.29) en (1.37) se encuentra
a = 8.3 x 0.001 k m - 8.3 X 0.001 k m - 0.000278 min2 0.000278 minZ
29.86 __ km m i d
Ejercicio 1.17. Resolver el ejercicio 1 . I 6 usando no-
En lugar de (1.38) podemos escribir tación exponencial.
1 min = 6 X 10s = 6 X 10 X (1 S) (1.40)
De esta relación despejamos (1 S)
y usando la ec. (1.26)
1 S = 1.67 X 10-"'min = 1.67 X 10-2min (1.41)
Este resultado es el mismo que el dado en la ec. (1.39). Elevando al cuadrado ambos lados de la ec. (1.41)
1 52 = (1 S) x (1 S) = (1 .67)2 X (10-2)2 (min)' = 2.78 X 10-4min2
Aquí
donde se usó la ec. (1.26)
Sustituyendo este resultado y la relación (1.32) en (1.37) obtenemos que
m a = 8.3 = 8.3 x - I m S 1 S 2
= 8.3 X km
2.78 X min2
Usamos ahora la ec. (1.27)
a = 2.986 X 10-3-"-4) - km m i d
= 2.986 X 10-3+4 ___ km
m i d
= 2.986 x I O - km m i d
que es el mismo resultado obtenido en el ejercicio 1.16.
20 1.3. DIMENSIONES. ANALISIS DIMENSIONAL Por tanto,
En la sección 1.1 estudiamos las unidades de las tres cantidades básicas. A cada una de estas cantida- des se le asignarán dimensiones. Así, se tienen dimen- siones de longitud, de t iempo y de masa. Denotare- mos estas dimensiones por medio de los símbolos L, T y M, respectivamente. Usaremos corchetes [ . . ] para indicar las dimensiones de . ; así, el símbolo [U] indi- cará las dimensiones de U.
En la sección 1.2 vimos que además de las cantida- des básicas también existen otras cantidades que son las derivadas como la velocidad, la aceleración, etc. A estas cantidades derivadas también se les asignan dimensiones en términos de las tres dimensiones bási- cas. Consideremos, por ejemplo, la velocidad, v; esta cantidad es el cociente de una longitud entre un tiem- po. Por tanto, las dimensiones de la velocidad son
L T [VI = - ( I .42)
Ejercicio 1.19. iCuáles son las dimensiones de la
Como vimos en la sección 1.2 la aceleración es el aceleración?
cociente
aceleración = cambio de velocidad
tiempo
Por tanto
[a] = - [VI T (1.43)
Pero arriba vimos que (véase ec. (1.42)) [v] = L/T, que sustituida en (1.43) nos da
L/T [a] = - T
E l símbolo de dimensión se maneja como símbolo al- gebraico. Por tanto, usando el resultado (1 .I 5) obtene- mos que las dimensiones de aceleración son
(1.44)
Ejercicio 1.20. Determinar las dimensiones de fuer- za.
Como veremos más adelante
fuerza = masa X aceleración
Pero en el ejercicio anterior, se obtuvieron las dimen- siones de la aceleración.
Sustituyendo (1.44) en (I .45) se encuentra que
M L T2 [F ] = - (1.46)
Ejercicio 1.21. En un problema se encuentra el si- guiente resultado
U = & F (1.47)
Aquí g es una aceleración y h una distancia. iQue di- mensiones tiene U?
La ecuación (1.47) se puede escribir como
U = g1/2hl/Z (1 .48)
Recordemos que
f i x112
Por tanto, de (1.48) se puede escribir
la ec. (1.49) queda como
(1.49)
[U] = [g]”’ [hI”* (1.50)
Como se dijo, g es una aceleración; por tanto, g tiene dimensiones de aceleración. En el ejercicio 1.19, ec. (1.44) se obtuvieron las dimensiones de aceleraclón
L [gl =
De la ec. (1 .SO) vemos que se necesita [g]”2. Tomando la raíz cuadrada de [g]
(1 .SI)

DIMENSIONES. ANALISIS DIMENSIONAL 21
Hay que recordar que Sustituyendo (1.57) y (1.58) en (1.56) se encuentra que
(1.52) MLz
[Eel = T2 (1.59)
Usando esto en el denominador de (1.51) nos da
(1.53)
Como h es una distancia, sus dimensiones son de lon- gitud
Y [h] = L
[h]l/Z = LUZ (1.54)
Sustituyendo las ecs. (1.53) y (1.54) en la ec. (1.50) se obtiene
Aquí se usó la ec. (1.26). Comparando este resultado con la ec. (1.42) concluimos que U tiene dimensiones de velocidad; es decir, U es una velocidad.
Ejercicio 1.22. jCuáles son las dimensiones de E, s i E, = [1/2] mv2? Aquí m es una masa y v es una velo- cidad.
De la definición
[EA = [l/21[ml[v21 (1.56)
La cantidad 1/2 no tiene dimensiones. En general, ningún número puro, como 3, -5, a = 3.14159, 0.8, -2/3, etc., tiene dimensiones.
Las dimensiones de m, por ser una masa, son
[m] = M (1.57)
La otra cantidad que aparece en (1.56) es [vz]
r.21 = [VI2
pero como v es una velocidad, sus dimensiones son (véase la ec. (1.42))
L T
[VI = -
por lo que elevando al cuadrado
L Z
TZ [VI? = - (1.58)
Ejercicio 1.23. Supóngase que después de un cálcu- lo se encuentra el siguiente resultado
W = 2mgHz (1.60)
Por otro lado se sabe que W es una cantidad que tiene dimensiones de
M L 2 [WI = T 2 (1.61 )
Además, m es una masa, g una aceleración y H una distancia. Verificar la congruencia dimensional de la ec. (1.60).
Verificar la congruencia dimensional de una ecua- ción significa comprobar que las dimensiones de la cantidad que está en el lado izquierdo son las mismas que las de la cantidad que está en el lado derecho. Esta condición es necesaria para que una ecuación sea correcta.
Analicemos las dimensiones del lado derecho (que denotaremos con I.d.1 de la ec. (1.60)
[!.d.] = [21[ml[gl[~zl (1.62)
Veamos cada factor: 2 no tiene dimensiones por ser un número puro; como m es una masa
[m] = M; (1.63)
dado que g es una aceleración (véase ec. 1.44)) L
[gl = 7 (1.64)
y como H es un? distancia, sus dimensiones son de longitud L, por lo que
[Hz] = [HI2 = LZ (1.65)

22 Cap. I . UNIDADES Y DIMENSIONES
Sustituyendo (1.63), (1.64) y (1.65) en (1.62) se tiene L M L X L2 T T2
[I.d.] = M X 7 X L2 =
- ML3 "
T2 (1.66)
Comparando este resultado con (1.61) vemos que el lado derecho de la ec. (1.60) NO tiene las mismas di- mensiones que el lado izquierdo de la misma ecua- ción. Por tanto, no hay congruencia dimensional de la ec. (1.60) y concluimos que esta ecuación NO es correcta.
En general, se recomienda que al obtener una ecua- ción se verifique su congruencia dimensional. S i hay algún error, este se puede manifestar en el análisis di- mensional. E s importante darse cuenta de que el aná- l is is dimensional no da ninguna información sobre po- sibles errores que puedan haber en factores que sean números puros, ya que éstos no tienen dimensiones.
Un t ipo de cantidades que se presentan con fre- cuencia son el logaritmo natural (In), la función expo- nencial de base e y las diversas funciones trigono-. métricas. E l argumento de cualquiera de estas funcio- nes debe ser una cantidad SIN dimensiones. Así, s i se tiene, por ejemplo,
1.8. La masa de un objeto es de 1 750 libras. Expresar esta masa en kilogramos. 1.9. Un terreno tiene un área de 1 355 yardasz. Expre- sar esta área en m2. 1.10. E l área de la República Mexicana es de aproxi- madamente 2 millones de km2. Dar esta área en millas cuadradas. 1.11. Un recipiente tiene un volumen de 77 galones. ¿A cuántos litros equivale? 1.12. E l gasto de agua diario de una familia es de 930 litros. iCuántos m3 gasta en 60 días? 1.13. Un auto se mueve a 97 km/h. Expresar esta velo- cidad en: a) mis; b) millasih. 1.14. Dar en millas/h2 la aceleración de 4.7 X IO4 mis2
1.15. Expresar la cantidad de 23.8 en unida- kg2 m2 S
desde ___ g2 cm2
1.16. Se encuentra que cierta cantldad tiene el valor de 7.8 l ibra pie. Expresar su valor en kg m. 1.17. iCuáles son las dimensiones de área? 1.18. >Qué dimensiones tiene K = F/P s i F y P son fuerzas? 1.19. Se encuentra que
S
P + Q R = 2 H ~7 z = I n y donde H es una distancia; P, O v F son fuerzas. jQué
. I c . dimensiones tiene R?
longitud y t, un tiempo? 1.21. Determinar las dimensiones de
el argumento y NO tiene dimensiones. Asimismo, 1.20. i ~ u é dimensiones tiene = 4.5hZt3 si h es una NO tiene dimensiones.
Análogamente, s i
w = e' 1 a2 6 v2
Q = "
tanto r como w NO tienen dimensiones. Para las fun- ciones trigonométricas, por ejemplo, s i siendo a una aceleración y v, una velocidad
1.22. Obtener las dimensiones de u = sens
tantos como u NO tienen dimensiones.
si las dimensiones de ,o, 4 y a son
PROBLEMAS
1.1. i A cuántos km equivalen 275 millas! 1.2. Una distancia de 137 km, i a cuántas millas equivale? 1.3. Una broca mide 3/16 de pulgada. i A cuántos milímetros equivale? 1.4. Una persona mide 5 pies 3 pulgadas de altura. Expresar esta longitud en metros y centímetros. 1.5. Expresar en segundos el intervalo de tiempo de 4 h 47 min 18 s. 1.6. Expresar en horas, minutos y segundos el interva- lo de tiempo de 4 517 s. 1.7. i A cuántas libras equivalen 75 kg?
1 .23. Si las dimensiones de F y P son ML2 T2
[ F ] = [PI = -
iqué dimensiones tiene Q = d n ?
1.24. Verificar la congruencia dimensional de la ecua- ción:
a) H = 4.7 v2t, siendo: [HI = L; ves una velocidad y t, un t iempo. b) 7 = a/v, siendo: 7 , un tiempo; a una aceleración y v, una velocidad.
PROBLEMAS 23
c) F = d T 3Q2 r2 siendo: F y Q fuerzas; r y s son d) v = d x siendo: v, una velocidad; g, una a c e distancias; v es una velocidad y g es una acelera- leración; R v h, distancias. ción. el v = Ht + HtZ, siendo: v, una velocidad; H una dis-
R + h
tancia y t, un tiempo.
2 V e c t o r e s
2.1. ESCALARES. VECTORES
Por nuestra experiencia diaria estamos familiariza- dos con cantidades para cuya descripción es suficien- te dar un valor. Por ejemplo, la edad de una persona: si decimos que tiene 19 años, su edad queda comple- tamente especificada. Otro ejemplo es el precio de un artículo: s i decimos que vale 175 pesos, su precio que- da completamente especificado. Este tipo de cantida- des se l laman escalares.
Escalar: s i para especificar una cantidad es suficien- te dar un número, se dice que esta cantidad es un es- calar. S i la cantidad tiene dimensiones, el número tiene que ir acompañado de su correspondiente uni- dad, por supuesto.
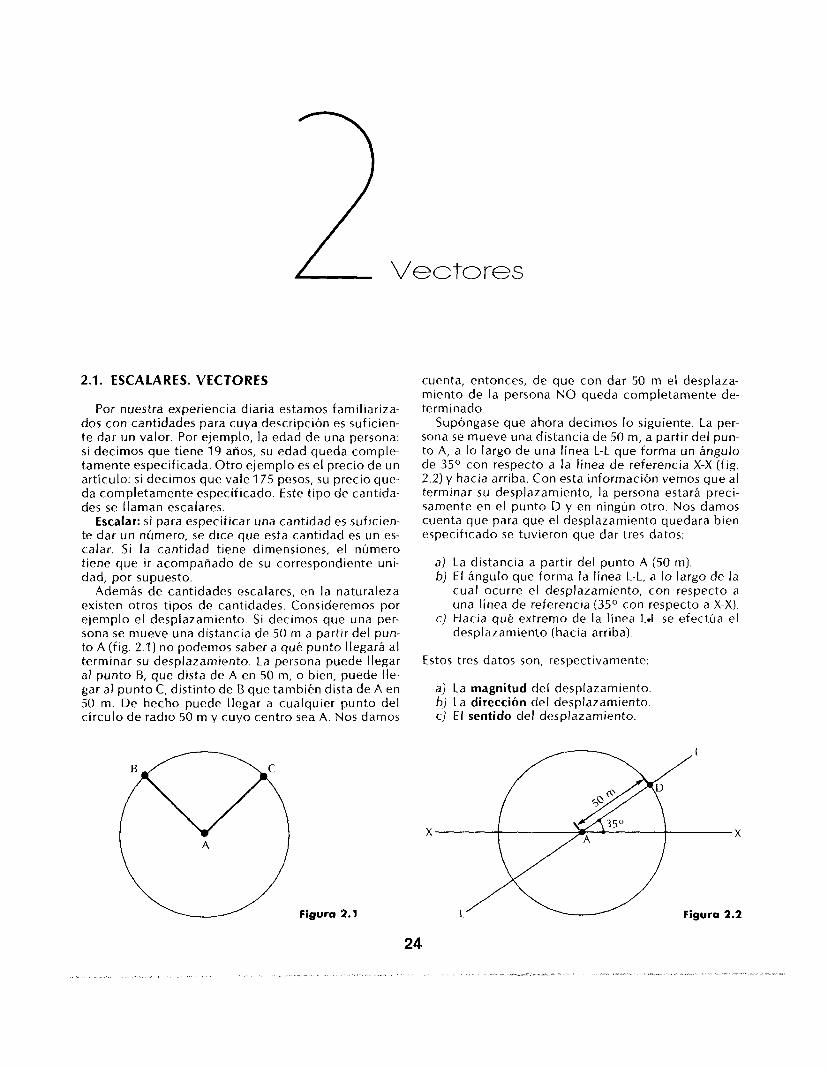
Además de cantidades escalares, en la naturaleza existen otros tipos de cantidades. Consideremos por ejemplo el desplazamiento. Si decimos que una per- sona se mueve una distancia de 50 m a partir del pun- to A (f ig. 2.1) no podemos saber a qué punto llegará al terminar su desplazamiento. La persona puede llegar al punto B, que dista de A en 50 m, o bien, puede Ile- gar al punto C, distinto de B que también dista de A en 50 m. De hecho puede llegar a cualquier punto del círculo de radio 50 m y cuyo centro sea A. Nos damos
cuenta, entonces, de que con dar 50 m el desplaza- miento de la persona NO queda completamente de- terminado.
Supóngase que ahora decimos lo siguiente. La per- sona se mueve una distancia de 50 m, a partir del pun- to A, a lo largo de una línea L-L que forma un ángulo de 3 5 O con respecto a la línea de referencia X-X (fig. 2.2) y hacia arriba. Con esta información vemos que al terminar su desplazamiento, la persona estará preci- samente en el punto D y en ningún otro. Nos damos cuenta que para que el desplazamiento quedara bien especificado se tuvieron que dar tres datos:
a) La distancia a partir del punto A (50 m). b] E l ángulo que forma l a línea L-L, a lo largo de la
cual ocurre el desplazamiento, con respecto a una línea de referencia ( 3 5 O con respecto a X-X).
c) Hacia qué extremo de la línea LWL se efectúa el desplazamiento (hacia arriba).
Estos tres datos son, respectivamente:
a) La magnitud del desplazamiento. b) La dirección del desplazamiento. c] E l sentido del desplazamiento.
24
ESCALARES. VECTORES 25
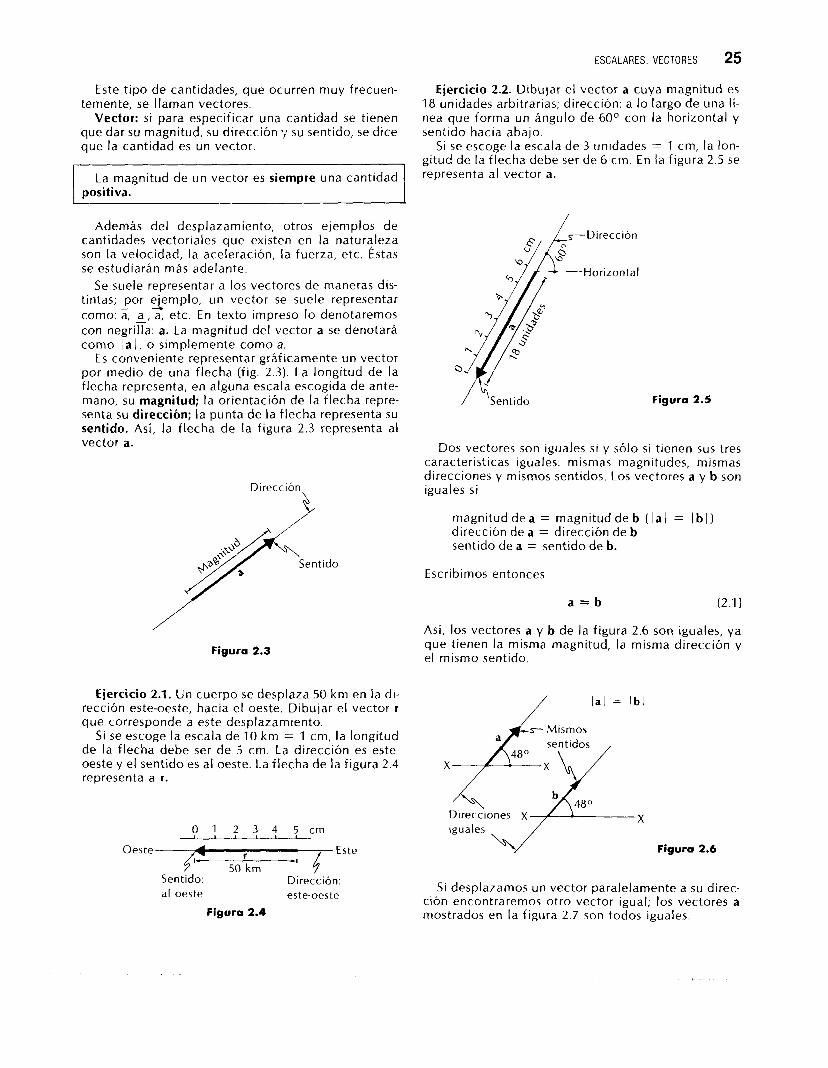
Este tipo de cantidades, que ocurren muy frecuen- Ejercicio 2.2. Dibujar el vector a cuya magnitud es temente, se llaman vectores. 18 unidades arbitrarias; dirección: a lo largo de una lí-
Vector: s i para especificar una cantidad se tienen nea que forma un ángulo de 60° con la horizontal y que dar su magnitud, su dirección y su sentido, se dice sentido hacia abajo. que la cantidad es un vector. Si se escoge la escala de 3 unidades = 1 cm, la lon-
gitud de la f lecha debe ser de 6 cm. En la figura 2.5 se La magnitud de un vector es siempre una cantidad representa al vector a.
positiva.
Además del desplazamiento, otros ejemplos de cantidades vectoriales que existen en la naturaleza son la velocidad, la aceleración, la fuerza, etc. Estas se estudiarán más adelante.
Se suele representar a los vectores de maneras dis- tintas; por ejemplo, un vector se suele representar como: 2, a ,; etc. En texto impreso lo denotaremos con negri'rla: a. La magnitud del vector a se denotará como l a l , o simplemente como a.
E s conveniente representar gráficamente un vector por medio de una f lecha (f ig. 2.3). La longitud de la flecha representa, en alguna escala escogida de ante- mano, su magnitud; la orientación de la flecha repre- senta su dirección; la punta de la flecha representa su sentido. Así, la f lecha de la f igura 2.3 representa al vector a.
Dirección,
/
Figura 2.5
Dos vectores son iguales si y sólo si tienen sus tres características iguales: mismas magnitudes, mismas direcciones y mismos sentidos. Los vectores a y b son iguales s i
/ Figura 2.3
magnitud de a = magnitud de b (la1 = I b l ) dirección de a = dirección de b sentido de a = sentido de b.
Escribimos entonces
Así, los vectores a y b de la figura 2.6 son iguales, ya que tienen la misma magnitud, la misma dirección y el mismo sentido.
Ejercicio 2.1. Un cuerpo se desplaza 50 km en la di- rección este-oeste, hacia el oeste. Dibujar el vector r que corresponde a este desplazamiento.
Si se escoge la escala de 10 km = 1 cm, la longitud oeste de la y flecha el sentido debe es ser al de oeste. 5 cm. La flecha La dirección de la figura es este- 2.4 X L(y representa a r.
la1 = lb1
Direcclones X X O 1 2 3 4 5 c m iguales
Oeste I
@ 4 Este
\S, Figura 2.6
F 50;trn Sentido: Dirección: al oeste este-oeste S i desplazamos un vector paralelamente a su direc-
ción encontraremos otro vector igual; los vectores a Figura 2.4 mostrados en la figura 2.7 son todos iguales.
26
Figura 2.7
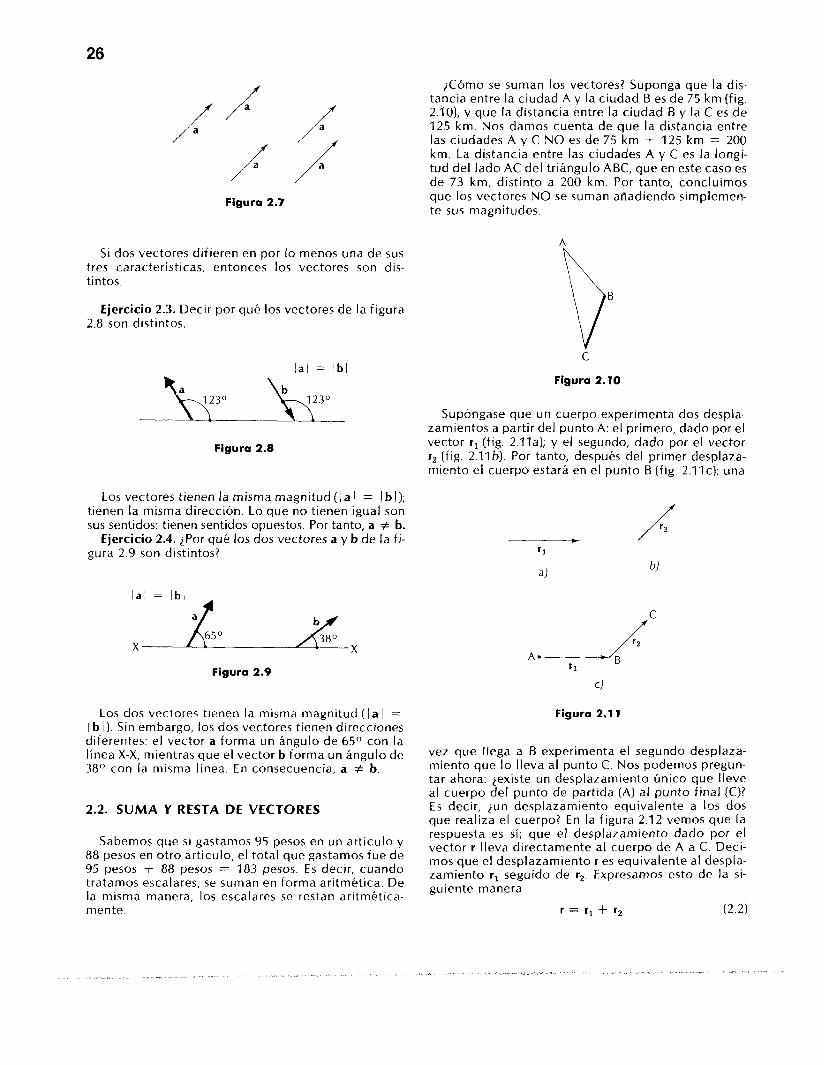
Si dos vectores difieren en por lo menos una de s u s tres características, entonces los vectores son dis- tintos.
Ejercicio 2.3. Decir por qué los vectores de la figura 2.8 son distintos.
iCómo se suman los vectores? Suponga que la dis- tancia entre la ciudad A y la ciudad B es de 75 km (f ig. 2.10), y que la distancia entre la ciudad B y la C es de 125 km. Nos damos cuenta de que la distancia entre las ciudades A y C NO es de 75 km + 125 km = 200 km. La distancia entre las ciudades A y C es la longi- tud del lado AC del triángulo ABC, que en este caso es de 73 km, distinto a 200 km. Por tanto, concluimos que los vectores NO se suman añadiendo simplemen- te sus magnitudes.
G B c
i a l = lb1
\;30 hao Figura 2.10
Supóngase que un cuerpo experimenta dos despla- zamientos a partir del punto A: el primero, dado por el vector rl (fig. 2.11a); y el segundo, dado por el vector r2 (fig. 2.11b). Por tanto, después del primer desplaza- miento el cuerpo estará en el punto B (f ig. 2.11~); una
Figura 2.8
Los vectores tienen la misma magnitud ( \ a l = Ibl); tienen la misma dirección. Lo que no tienen igual son sus sentidos: tienen sentidos opuestos. Por tanto, a + b.
Ejercicio 2.4. iPor qué los dos vectores a y b de la fi- gura 2.9 son distintos?
Figura 2.9
Los dos vectores tienen la misma magnitud ( l a I = 1 b I ) . Sin embargo, los dos vectores tienen direcciones diferentes: el vector a forma un ángulo de 65O con la línea X-X, mientras que el vector b forma un ángulo de 38O con la misma línea. En consecuencia, a f b.
2.2. SUMA Y RESTA DE VECTORES
Sabemos que s i gastamos 95 pesos en un artículo y 88 pesos en otro artículo, el total que gastamos fue de 95 pesos + 88 pesos = 183 pesos. Es decir, cuando tratamos escalares, se suman en forma aritmética. De la misma manera, los escalares se restan aritmética- mente.
Figura 2.1 1
vez que llega a B experimenta el segundo desplaza- miento que lo l leva al punto C. Nos podemos pregun- tar ahora: iexiste un desplazamiento Único que lleve al cuerpo del punto de partida (A ) al punto f inal (C)? E s decir, jun desplazamiento equivalente a los dos que realiza el cuerpo? En la figura 2.12 vemos que la respuesta es sí; que el desplazamiento dado por el vector r l leva directamente al cuerpo de A a C. Deci- mos que el desplazamiento r es equivalente al despla- zamiento r, seguido de r2. Expresamos esto de la si- guiente manera
r = r, + r2 (2.2)
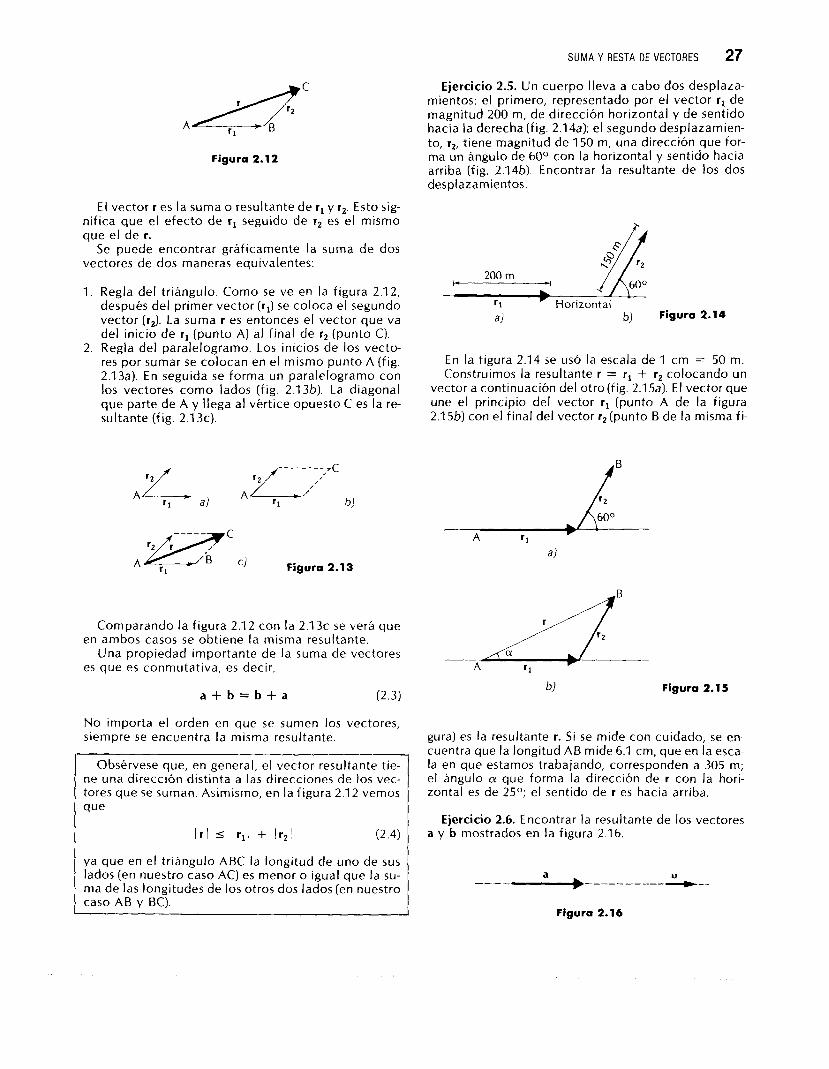
Figura 2.12
E l vector r es la suma o resultante de rl y r2. Esto sig- nif ica que e l efecto de rl seguido de r2 es el mismo que el de r.
Se puede encontrar gráficamente la suma de dos vectores de dos maneras equivalentes:
1. Regla del triángulo. Como se ve en la figura 2.12, después del primer vector (rJ se coloca el segundo vector (r2). La suma r es entonces el vector que va del inicio de rl (punto A) al final de r2 (punto C).
2. Regla del paralelogramo. Los inicios de los vecto- res por sumar se colocan en el mismo punto A (f ig. 2.13a). En seguida se forma un paralelogramo con los vectores como lados (fig. 2.13b). La diagonal que parte de A y llega al vértice opuesto C es la re- sultante (fig. 2.1 3c) .
cl Figura 2.1 3
Comparando la figura 2.12 con la 2 . 1 3 ~ se verá que
Una propiedad importante de la suma de vectores en ambos casos se obtiene la misma resultante.
es que es conmutativa, es decir,
a + b = b + a (2.3)
No importa el orden en que se sumen los vectores, siempre se encuentra la misma resultante.
~
Obsérvese que, en general, el vector resultante tie- ne una dirección distinta a las direcciones de los vec- tores que se suman. Asimismo, en la figura 2.12 vemos que !
Ir1 I Irll + I r 2 ( (2.4)
ya que en el triángulo ABC la longitud de uno de sus lados (en nuestro caso AC) es menor o igual que la su- ma de las longitudes de los otros dos lados (en nuestro caso AB y BC).
SUMA Y RESTA DE VECTORES 27
Ejercicio 2.5. Un cuerpo lleva a cabo dos desplaza- mientos: el primero, representado por el vector rl de magnitud 200 m, de dirección horizontal y de sentido hacia la derecha (fig. 2.14a); el segundo desplazamien- to, rz, tiene magnitud de 150 m, una dirección que for- ma un ángulo de 60° con la horizontal y sentido hacia arriba (fig. 2.14b). Encontrar la resultante de los dos desplazamientos.
7,- - uu m cl / x c.no
Figura 2.14
En la figura 2.14 se usó la escala de 1 cm = 50 m. Construimos la resultante r = rl + r2 colocando un
vector a continuación del otro (fig. 2.15a). E l vector que une el principio del vector rl (punto A de la figura 2.15b) con el final del vector r,(punto B de la misma fi-
r
bl Figura 2.15
gura) es la resultante r. Si se mide con cuidado, se en- cuentra que la longitud AB mide 6.1 cm, que en la esca- la en que estamos trabajando, corresponden a 305 m; el ángulo a que forma la dirección de r con la hori- zontal es de 25O; el sentido de r es hacia arriba.
Ejercicio 2.6. Encontrar la resultante de los vectores a y b mostrados en la figura 2.16.
Figura 2.16
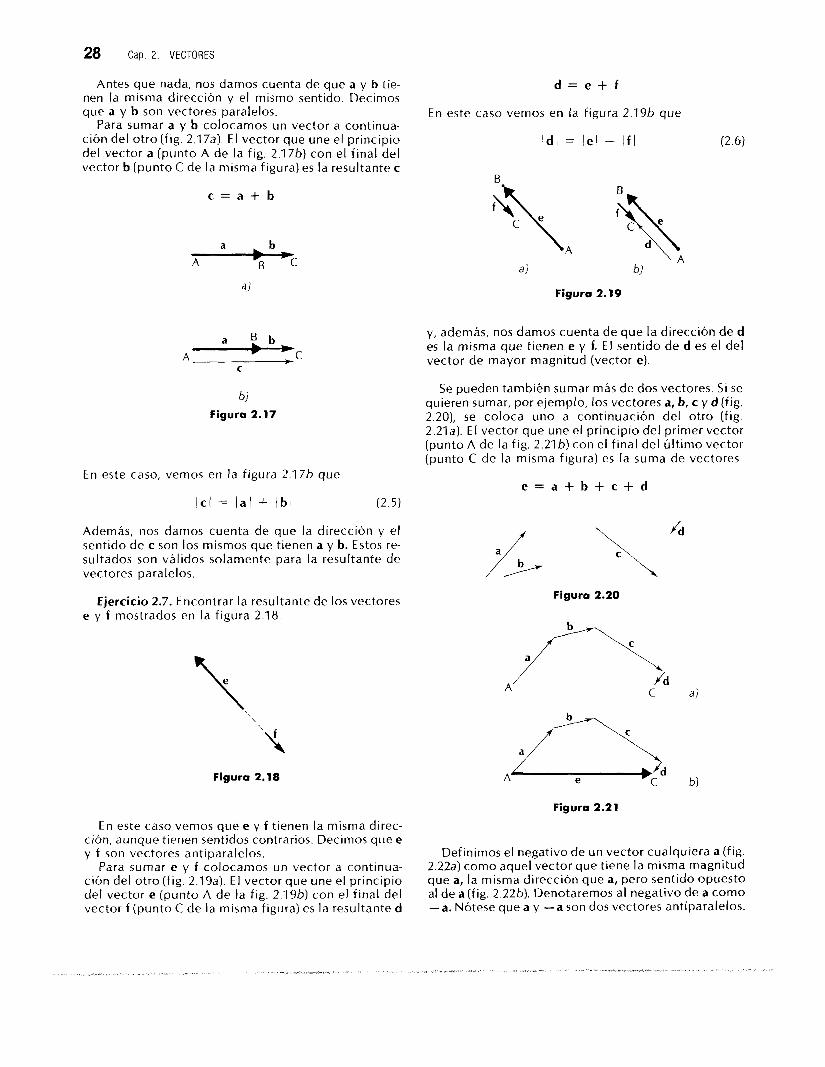
28 Cap. 2. VECTORES
Antes que nada, nos damos cuenta de que a y b tie- nen la misma dirección y el mismo sentido. Decimos que a y b son vectores paralelos.
Para sumar a y b colocamos un vector a continua- ción del otro (f ig. 2.17~1). E l vector que une el principio del vector a (punto A de la f ig. 2.17b) con el f inal del vector b (punto C de la misma figura) es la resultante c
c = a + b
a b A P C
a i
a B b A -C
C
bi Figura 2.17
En este caso, vemos en la figura 2.17b que
! c l = la1 + lb1 (2.5)
Además, nos damos cuenta de que la dirección y el sentido de c son los mismos que tienen a y b. Estos re- sultados son válidos solamente para la resultante de vectores paralelos.
Ejercicio 2.7. Encontrar la resultante de los vectores e y f mostrados en la figura 2.18.
z,, ‘ ..
Figura 2.18
En este caso vemos que e y f tienen la misma direc- ción, aunque tienen sentidos contrarios. Decimos que e y f son vectores antiparalelos.
Para sumar e y f colocamos un vector a continua- ción del otro (f ig. 2.19a). E l vector que une el principio del vector e (punto A de la fig. 2.19b) con el final del vector f (punto C de la misma figura) es la resultante d
d = e + f
En este caso vemos en la figura 2.19b que
id1 = ! e l - I f 1
Figura 2.19
y, además, nos damos cuenta de que la dirección de d es la misma que tienen e y f. E l sentido de d es el del vector de mayor magnitud (vector e) .
Se pueden también sumar más de dos vectores. S i se quieren sumar, por ejemplo, los vectores a, b, c y d (fig. 2.20), se coloca uno a continuación del otro (f ig. 2.21a). E l vector que une el principio del primer vector (punto A de la fig. 2.21b) con el final del último vector (punto C de la misma figura) es la suma de vectores
e = a + b + c + d
Figura 2.20
Figura 2.2 1
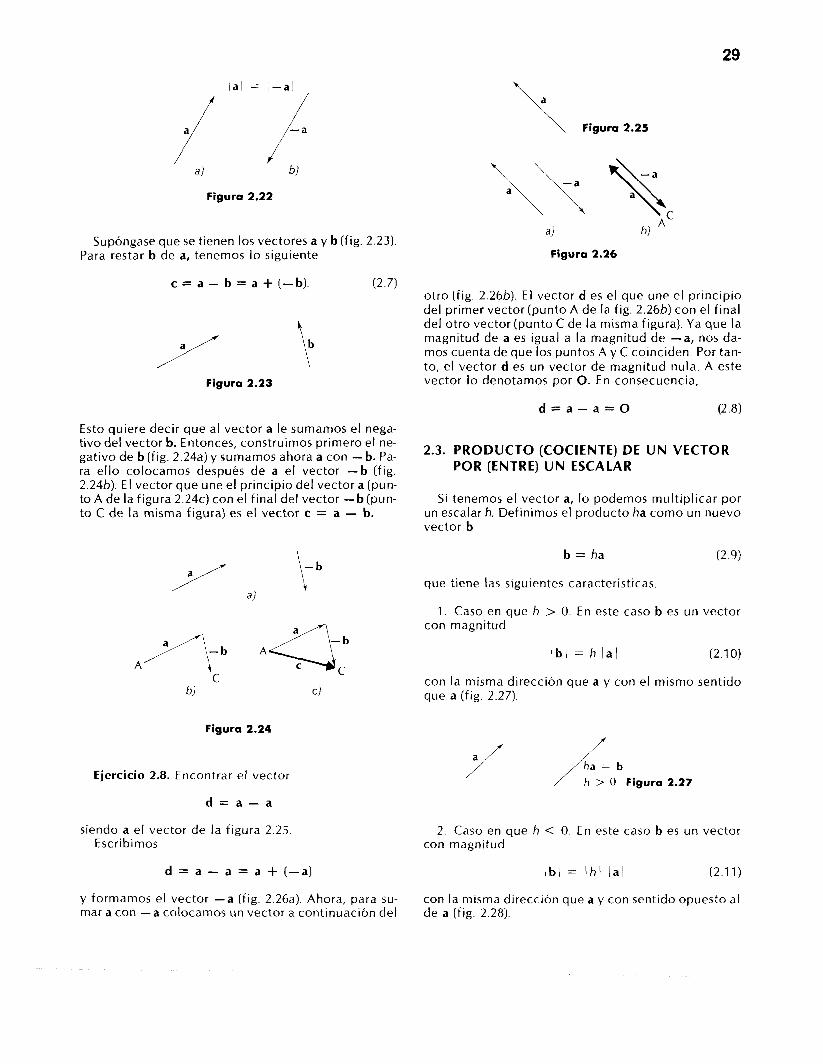
Definimos el negativo de un vector cualquiera a (fig. 2.22a) como aquel vector que tiene la misma magnitud que a, la misma dirección que a, pero sentido opuesto al de a (fig. 2.22b). Denotaremos al negativo de a como -a. Nótese que a y - a son dos vectores antiparalelos.
/ a l = I - a l
29
\ Figura 2.25
Figura 2.22
Supóngase que se tienen los vectores a y b (fig. 2.23). Para restar b de a, tenemos lo siguiente
al Figura 2.26
c = a - b = a + [-b). (2.7) otro (fig. 2.266). E l vector d es el que une el principio del primer vector (punto A de la fig. 2.266) con el final del otro vector (punto C de la misma figura). Ya que la magnitud de a es igual a la magnitud de -a , nos da- mos cuenta de que los puntos A y C coinciden. Por tan- to, el vector d es un vector de magnitud nula. A este
Figura 2.23 vector lo denotamos por O. En consecuencia,
d = a - a = O Es to quiere decir que al vector a le sumamos el nega- tivo del vector b. Entonces, construimos primero el ne- gativo de b (fig. 2.24a) y sumamos ahora a con - b. Pa- 2.3. PRODUCTO (COCIENTE) DE UN VECTOR ra ello colocamos después de a el vector -b (fig. POR (ENTRE) UN ESCALAR 2.24b). E l vector que une el principio del vector a (pun- to A de la figura 2 . 2 4 ~ ) con el f inal del vector - b (pun- S i tenemos el vector a, lo podemos multiplicar por to C de la misma figura) es el vector c = a - b. un escalar h. Definimos el producto ha como un nuevo
-
vector b
\
al 1- b = ha (2.9)
que tiene las siguientes características.
1. Caso en que h > O. En este caso b es un vector con magnitud
lb1 = h / a l (2 .I O)
con la misma dirección que a y con el mismo sentido C bl cl que a (fig. 2.27).
Figura 2.24
Ejercicio 2.8. Encontrar el vector
d = a - a
siendo a el vector de la f igura 2.25 Escribimos
/ / ha = b h > O Figura 2.27
2. Caso en que h < O. En este caso b es un vector con magnitud
30
Figura 2.28 Figura 2.31
i es
E l valor absoluto de un escalar h, denotado por ( h 1 1 si h > O, lh l = h s i h < o, lh l = "h si h = o, \ h i = o
E l valor absoluto de un escalar es siempre un número positivo (o cero).
Hay que recordar que la magnitud de un vector es siempre una cantidad positiva.
3. Caso en que h = O. En este caso el vector b es un vector de magnitud nula. O sea
b = O a = O
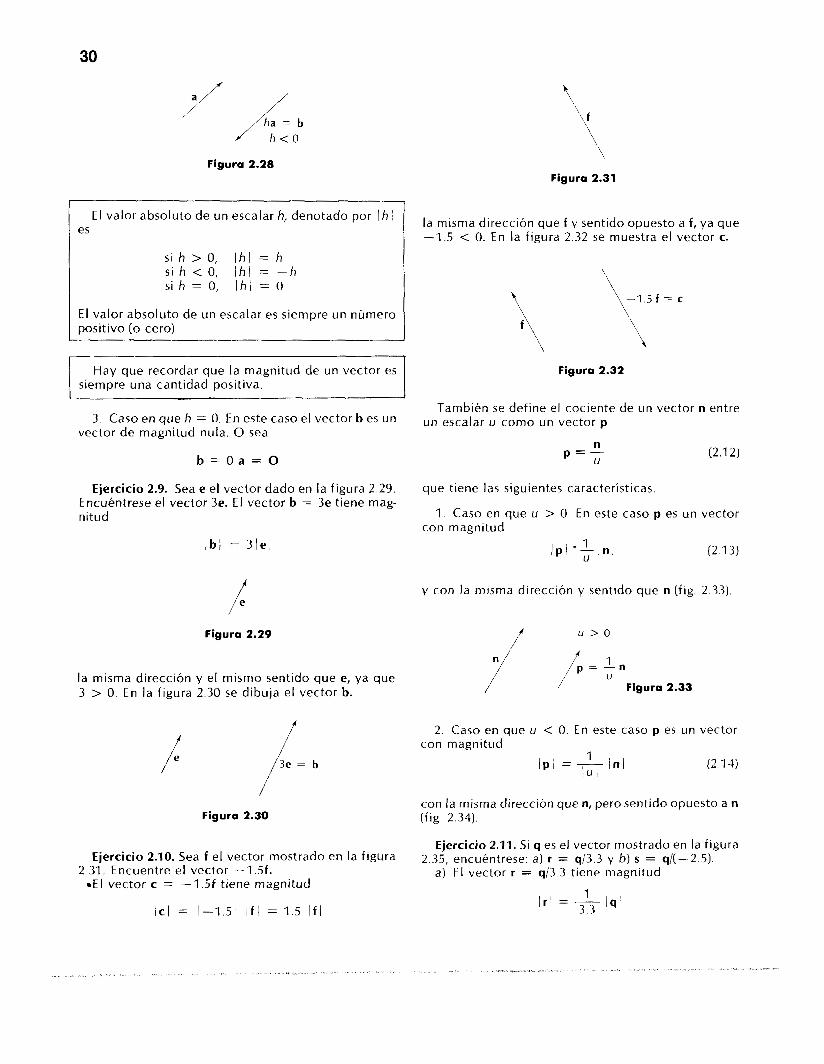
la misma dirección que f y sentido opuesto a f , ya que -1.5 < O. En la f igura 2.32 se muestra el vector c.
Figura 2.32
También se define el cociente de un vector n entre un escalar u como un vector p
P = ; n (2.1 2)
Ejercicio 2.9. Sea e el vector dado en la f igura 2.29. que tiene las siguientes características. Encuéntrese el vector 3e. E l vector b = 3e tiene mag- nitud 1 . Caso en que u > O. En este caso p es un vector
con magnitud Ibl = 3 le l
Figuro 2.29
la misma dirección y el mismo sentido que e, ya que 3 > O. En la figura 2.30 se dibuja el vector b.
Figura 2.30
Ipl =T I n / 1 (2.1 3)
y con la misma dirección y sentido que n (fig. 2.33).
i / Figura 2.33
2. Caso en que u < O. En este caso p es un vector
1 / p i = - In1 (2.1 4)
con magnitud
l u 1
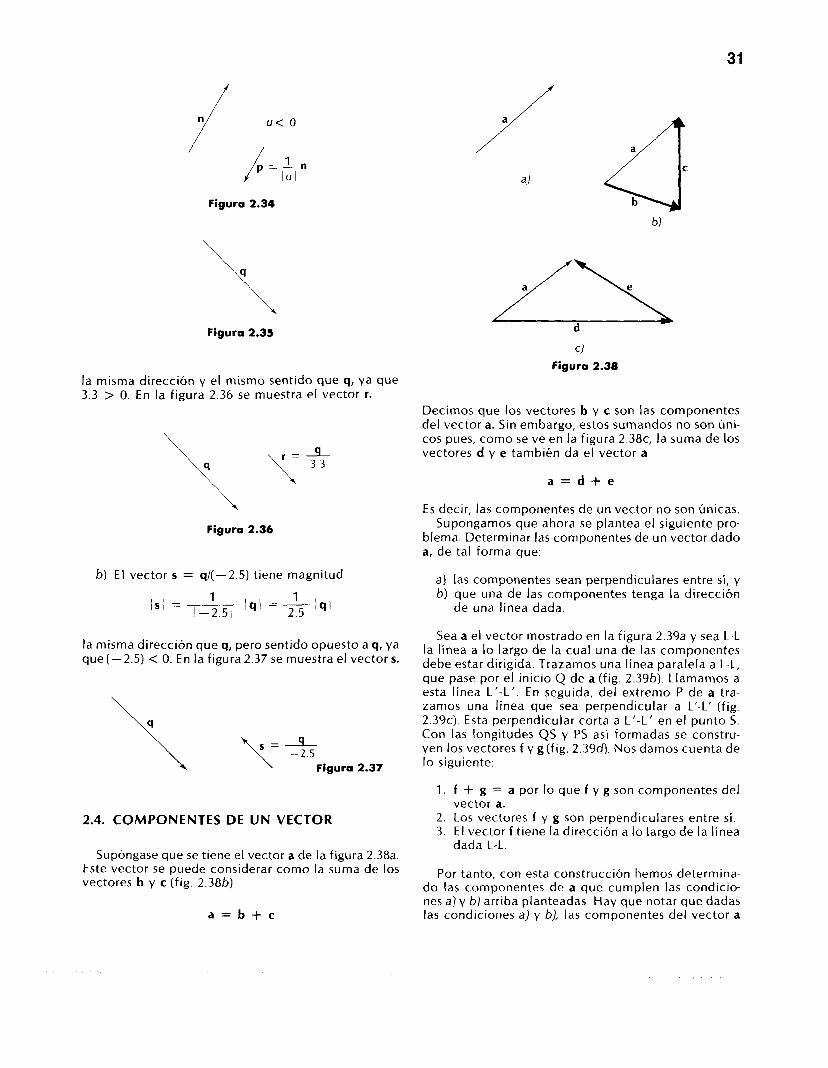
con la misma dirección que n, pero sentido opuesto a n (fig. 2.34).
Ejercicio 2.11. Si q es el vector mostrado en la figura Ejercicio 2.10. Sea f el vector mostrado en la figura 2.35, encuéntrese: a) r = q/3.3 y b) S = g/(-2.5).
2.31. Encuentre el vector -1.5f. a) E l vector r = q/3.3 t iene magnitud - E l vector c = -1.5f t iene magnitud
I r / = - Iql I
3.3
31
/ ./ u < o i /
Figura 2.34
Figura 2.35
cl Figura 2.38
la misma dirección y el mismo sentido que q, ya que 3 .3 > O. En la figura 2.36 se muestra el vector r.
Decimos que los vectores b y c son las componentes del vector a. Sin embargo, estos sumandos no son úni- cos pues, como se ve en la figura 2.38c, la suma de los \\_\\ \ 3.3
r = L vectores d y e también da el vector a
a = d + e
\ Figura 2.36
E s decir, las componentes de un vector no son únicas. Supongamos que ahora se plantea el siguiente pro-
blema. Determinar las componentes de un vector dado a, de tal forma que:
b) E l vector S = q/(-2.5) tiene magnitud a) las componentes sean perpendiculares entre sí, y
1 1 b) que una de las componentes tenga la dirección Is/ = Iql = - Iql I -2.5 I 2.5 de una línea dada.
que pase por e l inicio Q de a (fig. 2.39b). Llamamos a esta línea L ’ -L ’ . En seguida, del extremo P de a tra- zamos una línea que sea perpendicular a L’-L’ (fig. 2 . 3 9 ~ ) . Esta perpendicular corta a L ’ -L ’ en el punto S. Con las longitudes QS y PS así formadas se constru- yen los vectores f y g (fig. 2.39d) . Nos damos cuenta de
Figura 2.37 lo siguiente:
1 . f + g = a por lo que f y g son componentes del
2.4. COMPONENTES DE UN VECTOR 2 . Los vectores f y g son perpendiculares entre sí . 3. E l vector f tiene la dirección a lo largo de la línea
vector a.
Supóngase que se tiene el vector a de la figura 2.38a. dada L-L.
vectores b y c (fig. 2.38b) Este vector se puede considerar como la Suma de 10s Por tanto, con esta construcci~n hemos determina.
do las componentes de a que cumplen las condicio- nes a ) y b) arriba planteadas. Hay que notar que dadas
a = b + c las condiciones a) y b), las componentes del vector a
32
1 1 L
bi Figura 2.39 dl
que así se obtienen son únicas. No se puede encontrar otra pareja de componentes que satisfagan las mis- mas condiciones.
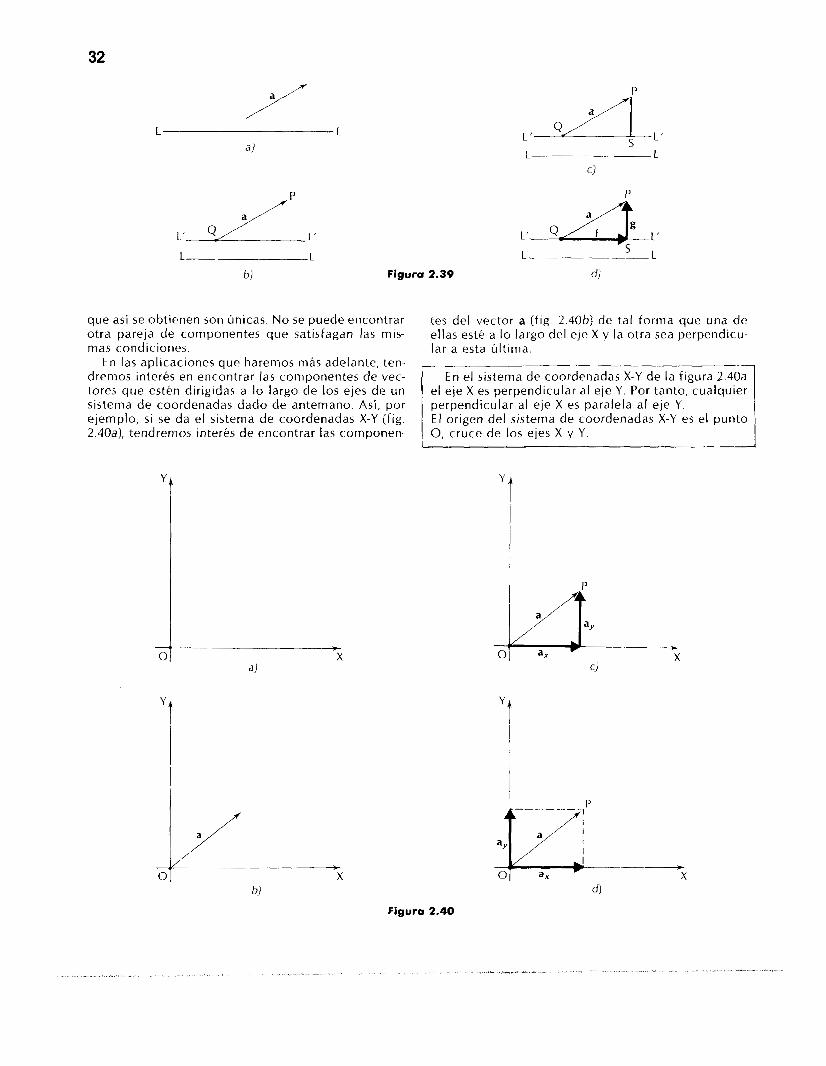
En las aplicaciones que haremos más adelante, ten- dremos interés en encontrar las componentes de vec- tores que estén dirigidas a lo largo de los ejes de un sistema de coordenadas dado de antemano. Así, por ejemplo, s i se da el sistema de coordenadas X-Y (fig. 2.40a), tendremos interés de encontrar las componen-
P
tes del vector a (fig. 2.40b) de tal forma que una de ellas esté a lo largo del eje X y la otra sea perpendicu- lar a esta últ ima.
En el sistema de coordenadas X-Y de la figura 2.40a el eje X es perpendicular al eje Y. Por tanto, cualquier perpendicular al eje X es paralela al eje Y. E l origen del sistema de coordenadas X-Y es el punto O, cruce de los ejes X y Y.
I P
't
Figura 2.40
COMPONENTES DE UN VECTOR 33
Siguiendo los pasos de la construcción dada arriba, encontramos que las componentes buscadas son los vectores a, y ay (fig. 2.40~1, o como se muestran en la figura 2.40d. E s decir,
a = a, + ay (2 .I 5)
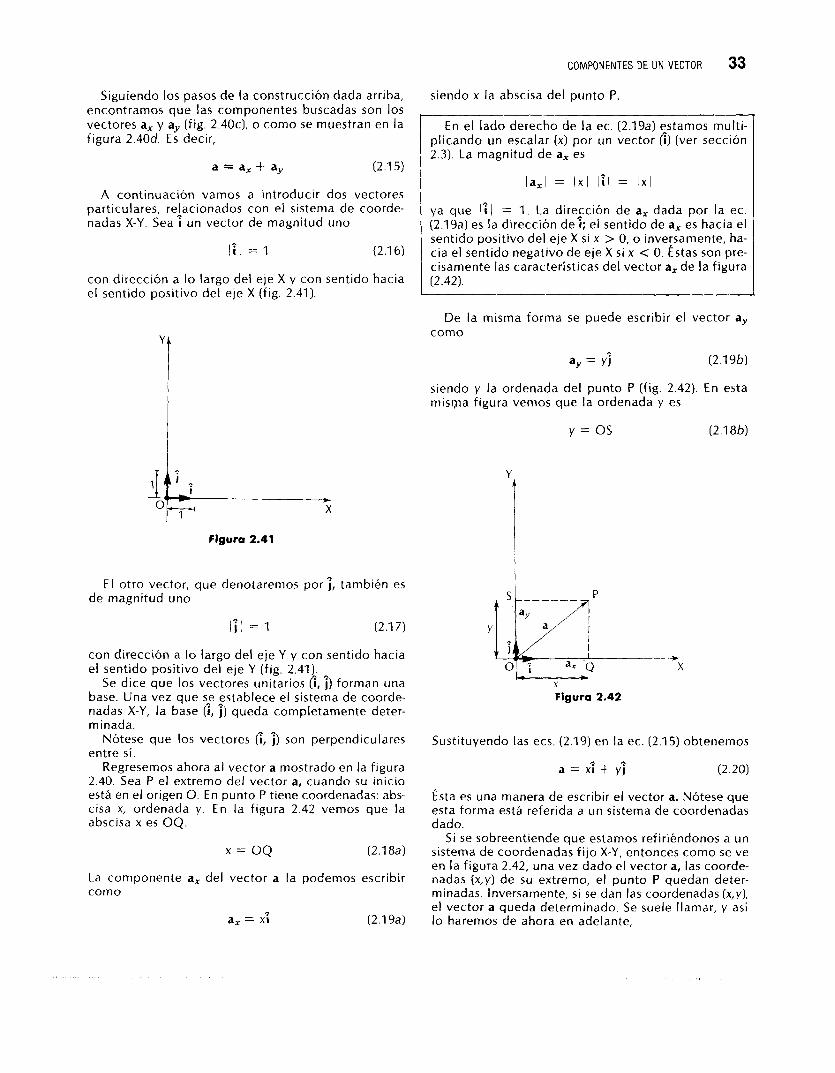
A continuación vamos a introducir dos vectores particulares, relacionados con el sistema de coorde- nadas X-Y. Sea i un vector de magnitud uno
111 = 1 (2.16)
con dirección a lo largo del eje X y con sentido hacia el sentido positivo del eje X (fig. 2.41).
Figura 2.41
E l otro vector, que denotaremos por j, también es de magnitud uno
Ijl = 1 (2.1 7 )
con dirección a lo largo del eje Y y con sentido hacia el sentido positivo del eje Y (fig, 2.41k ~
Se dice que los vectores unitarios (i, j) forman una base. Una vez que s,e _establece el sistema de coorde- nadas X-Y, la base (i, j) queda completamente deter- minada.
Nótese que los vectores 6, 1) son perpendiculares entre sí.
Regresemos ahora al vector a mostrado en la figura 2.40. Sea P el extremo del vector a, cuando su inicio está en el origen O. En punto P tiene coordenadas: abs- cisa x, ordenada y. En la figura 2.42 vemos que la abscisa x es OQ.
x = OQ (2.18a)
La componente a, del vector a la podemos escribir como
a
a, = XI (2.1 9a)
siendo x la abscisa del punto P.
En el lado derecho de la ec. (2.194 e_stamos mult i- plicando un escalar (x) por un vector (i) (ver sección 2.3). La magnitud de a, es
Ia,l = 1x1 IT I = 1x1
ya que 111 = 1. La diresción de a, dada por la ec. (2.19a) es la dirección de i; el sentido de a, es hacia el sentido positivo del eje X si x > O, o inversamente, ha- cia el sentido negativo de eje X s i x < O. Estas son pre- cisamente las características del vector a, de la figura (2.42).
De la misma forma se puede escribir el vector ay como
A
a y = YJ (2.19b)
siendo y la ordenada del punto P (fig. 2.42). En esta misma figura vemos que la ordenada y es
y = os (2.1 8b)
X Figura 2.42
” X
Sustituyendo las ecs. (2.19) en la ec. (2.15) obtenemos
a = x i + y j (2.20)
Ésta es una manera de escribir el vector a. Nótese que esta forma está referida a un sistema de coordenadas dado.
S i se sobreentiende que estamos refiriéndonos a un sistema de coordenadas f i j o X-Y, entonces como se ve en la figura 2.42, una vez dado el vector a, las coorde- nadas (x,y) de su extremo, el punto P quedan deter- minadas. Inversamente, si se dan las coordenadas (x,y), el vector a queda determinado. Se suele llamar, y así lo haremos de ahora en adelante,
a , .
34 Cap. 2. VECTORES
a la abscisa x: la componente x del vector a
Y
a la ordenada y: la componente y del vector a.
La cantidad OQ = x es la proyección del vector a so- bre el eje X, mientras que OS = y es la proyección de a sobre el eje Y.
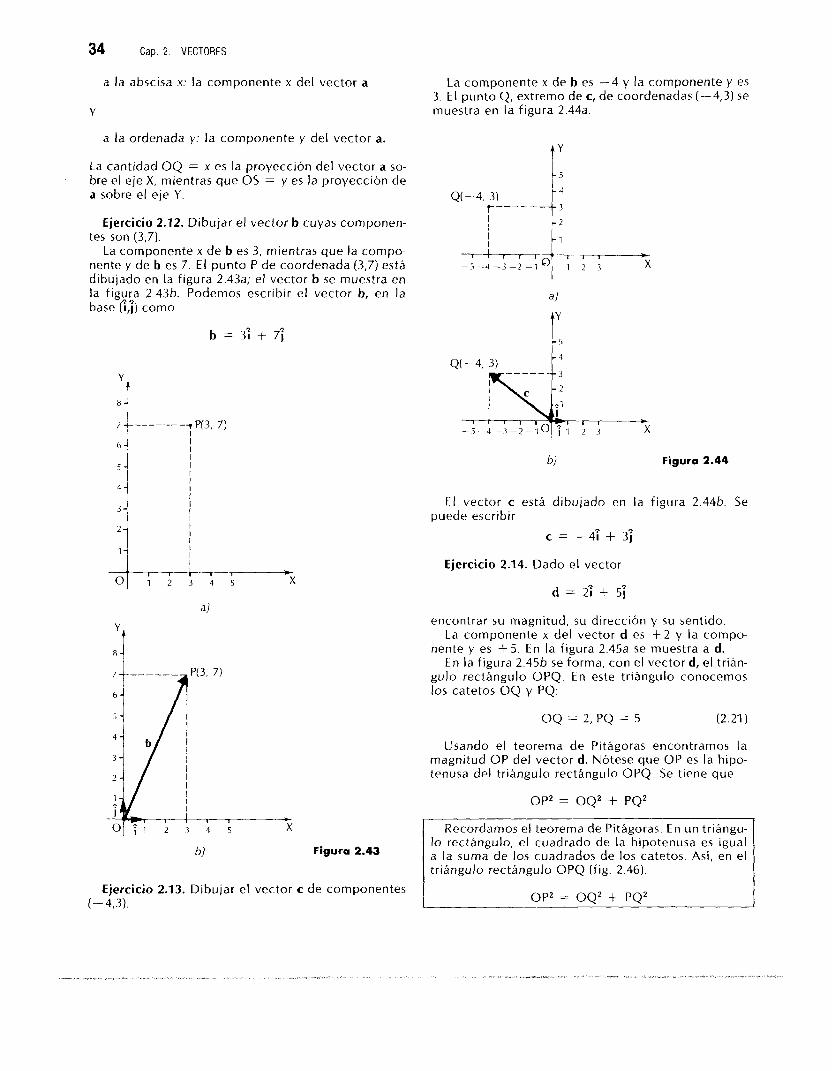
Ejercicio 2.12. Dibujar el vector b cuyas componen- tes son (3,7).
La componente x de b es 3, mientras que la compo- nente y de b es 7. E l punto P de coordenada (3,7) está dibujado en la figura 2.43a; el vector b se muestra en la figyLa 2.43b. Podemos escribir el vector b, en la base (i,j) como
b = 3; + 7;
T"--
5 +
X
bl Figura 2.43
Ejercicio 2.13. Dibujar el vector c de componentes (-4,3).
La componente x de b es -4 y la componente y es 3. E l punto Q , extremo de c, de coordenadas (-4,3) se muestra en la figura 2.44a.
, " \ I , , ,
""_
- - 5 . - 4 - - 3 - - 2 - 1 0 7 1 2 3 -
X
bl Figura 2.44
FI vector c está dibujado en la figura 2.44b. Se puede escribir
c = -4: + 3;
Ejercicio 2.14. Dado el vector
d = 21 + 5;
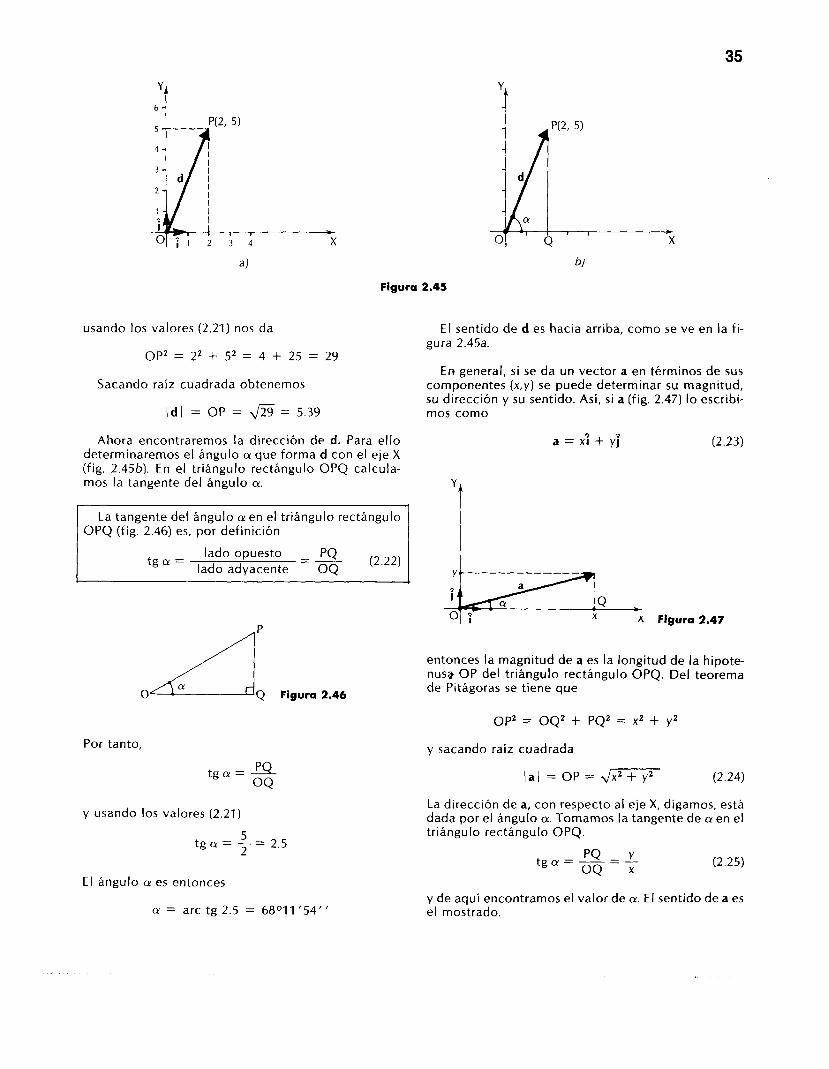
encontrar su magnitud, su dirección y su sentido. La componente x del vector d es + 2 y la compo-
nente y es +5. En la f igura 2.45a se muestra a d. En la figura 2.45b se forma, con el vector d, el trián-
gulo rectángulo OPQ. En este triángulo conocemos los catetos OQ y PQ:
OQ = 2, PQ = 5 (2.21)
Usando el teorema de Pitágoras encontramos la magnitud OP del vector d. Nótese que OP es la hipo- tenusa del triángulo rectángulo OPQ. Se tiene que
OP2 = OQ2 + PQz
lo rectángulo, el cuadrado de la hipotenusa es igual a la suma de los cuadrados de los catetos. Así, en el triángulo rectángulo OPQ (fig. 2.46).
OP2 = OQ2 + PO2
6 ’$ 35
f
Figura 2.45
usando los valores (2.21) nos da
OP2 = 22 + S2 = 4 + 25 = 29
Sacando raíz cuadrada obtenemos
Id1 = OP = = 5.39
Ahora encontraremos la dirección de d. Para ello determinaremos el ángulo a que forma d con el eje X (fig. 2.45b). En el tr iángulo rectángulo OPQ calcula- mos la tangente del ángulo a.
La tangente del ángulo CY en el triángulo rectángulo OPQ (fig. 2.46) es, por definición
t g a = lado opuesto _. PQ
lado adyacente O Q ”
D
Figura 2.46
Por tanto,
tg a = OQ
y usando los valores (2.21)
5 2 tg a = - = 2.5
E l ángulo CY es entonces
CY = arc tg 2.5 = 68O11 ’54”
E l sentido de d es hacia arriba, como se ve en la fi- gura 2.45a.
En general, s i se da un vector a en términos de sus componentes (x,y) se puede determinar su magnitud, su dirección y su sentido. Así, s i a (fig. 2.47) lo escribi- mos como
a = x l + y j (2.23)
Y)
- X Figura 2.47
entonces la magnitud de a es la longitud de la hipote- nus;) OP del triángulo rectángulo OPQ. Del teorema de Pitágoras se tiene que
OP2 = OQ2 + PQ2 = x2 + y2
y sacando raíz cuadrada
IaI = OP = 4- (2.24)
La dirección de a, con respecto al eje X, digamos, está dada por el ángulo CY. Tomamos la tangente de a en el triángulo rectángulo OPQ.
(2.25)
y de aquí encontramos el valor de CY. E l sentido de a es el mostrado.
36 Cap. 2. VECTORES
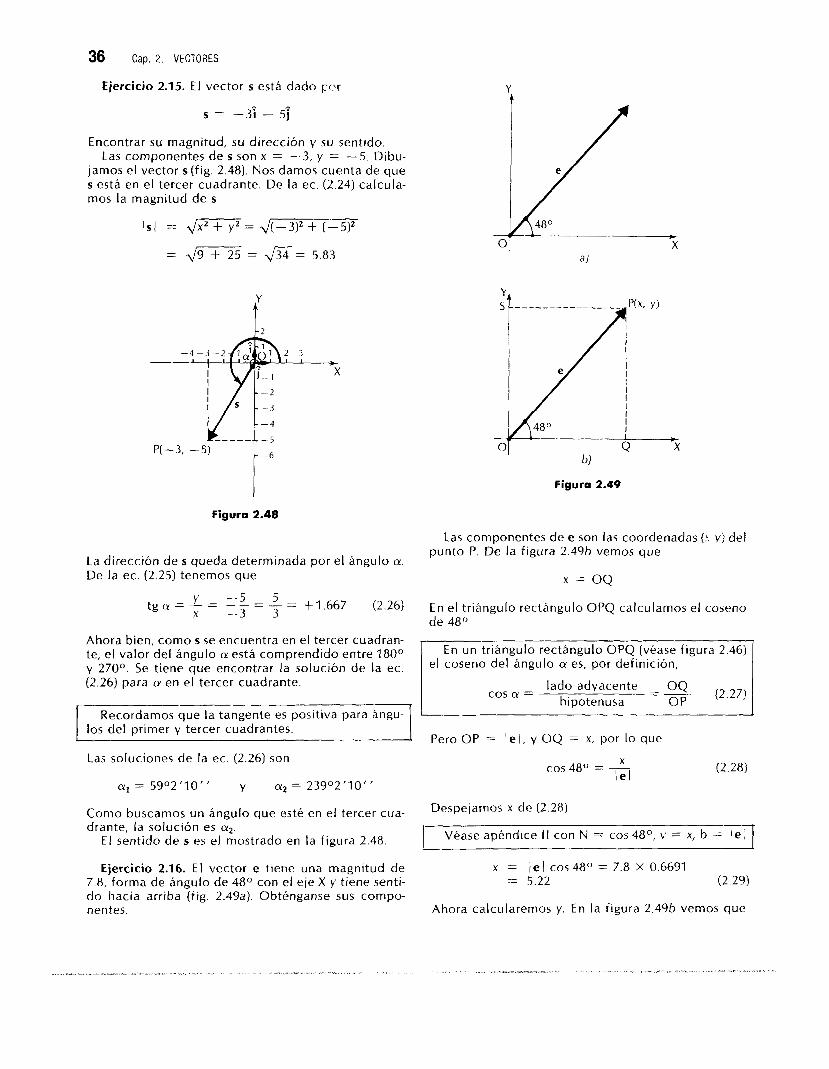
Ejercicio 2.15. E l vector S está dado Fc'r A
s = -3i - 5 j
Encontrar su magnitud, s u dirección y su sentido. Las componentes de S son x = -3, y = -5. Dibu-
jamos el vector S (fig. 2.48). Nos damos cuenta de que S está en el tercer cuadrante. De la ec. (2.24) calcula- mos la magnitud de s
Is1 = d m = J(-3)* + (-512
= d m = f i = 5.83
Figura 2.48
La dirección de S queda determinada por el ángulo a. De l a ec. (2.25) tenemos que
(2.26)
Ahora bien, como S se encuentra en el tercer cuadran- te, el valor del ángulo a está comprendido entre 180° y 270'. Se tiene que encontrar la solución de la ec. (2.26) para a en el tercer cuadrante.
bl
Figura 2.49
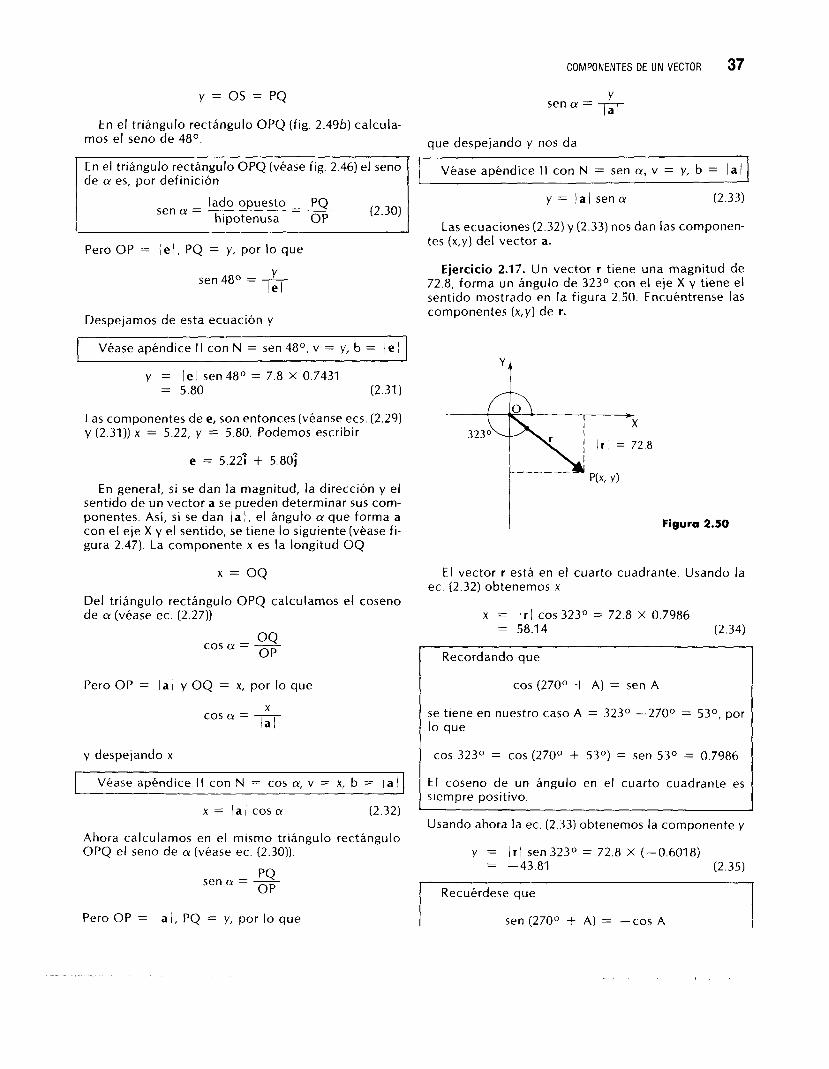
Las componentes de e son las coordenadas (:. v ) del punto P. De la figura 2.49b vemos que
x = OQ
En el triángulo rectángulo OPQ calculamos el coseno de 48'
En un triángulo rectángulo OPQ (véase figura 2.46) el coseno del ángulo a es, por definición,
cos a = lado adyacente - O Q (2,27) hipotenusa OP
"
Recordamos que la tangente es positiva para ángu- los del primer y tercer cuadrantes.
Pero OP = I e l , y OQ = x, por lo que
I L
Las soluciones de la ec. (2.26) son
al = 59'2'10'' y a2 239'2 ' I O ' ' COS 48O = __
X
le1 (2.28)
Como buscamos un ángulo que esté en el tercer cua- x de (2.281 drante, la solución es a2.
E l sentido de S es el mostrado en la figura 2.48. Véase apéndice II con N = cos 48', v = x, b = le I
Ejercicio 2.16. E l vector e tiene una magnitud de x = / e 1 cos 48O = 7.8 X 0.6691 7.8, forma de ángulo de 48O con el eje X y tiene senti- = 5.22 (2.29) do hacia arriba (fig. 2.49a). Obténganse sus compo- nentes. Ahora calcularemos y. En la figura 2.49b vemos que
COMPONENTES DE UN VECTOR 37
y = OS = PQ sen CY = Y
En el triángulo rectángulo OPQ (fig. 2.49b) calcula- mos el seno de 48O. que despejando y nos da
En el triángulo rectángulo OPQ (véase fig. 2.46) el seno de CY es, por definición
1
sen CY = lado opuesto - PQ hipotenusa OP " (2.30)
Pero OP = Iel, PQ = y, por lo que
sen 48O = - Y le1
Despejamos de esta ecuación y
Véase apéndice II con N = sen 48O, v = y, b = l e 1
y = / e 1 sen 48O = 7.8 X 0.7431 = 5.80 (2.31)
Las componentes de e, son entonces (véanse ecs. (2.29) y (2.31)) x = 5.22, y = 5.80. Podemos escribir
e = 5.221 + 5.80;
En general, s i se dan la magnitud, la dirección y el sentido de un vector a se pueden determinar sus com- ponentes. Así, s i se dan la I, el ángulo CY que forma a con el eje X y el sentido, se tiene lo siguiente (véase fi- gura 2.47). La componente x es la longitud OQ
x = O Q
Del triángulo rectángulo OPQ calculamos el coseno de CY (véase ec. (2.27))
OQ OP cos a! = -
Pero OP = la I y O Q = x, por lo que
cos CY = - X
la I
y despejando x
1 Véase apéndice I I con N = cos CY, v = x, b = / a I I x = tal cosa! (2.32)
Ahora calculamos en el mismo triángulo rectángulo OPQ el seno de CY (véase ec. (2.30)).
PQ sen CY = - OP
Pero O P = la I , PQ = y, por lo que
Véase apéndice I I con N = sen CY, v = y, b = la 1 I y = la1 sena (2.33)
Las ecuaciones (2.32) y (2.33) nos dan las componen- tes (x,y) del vector a.
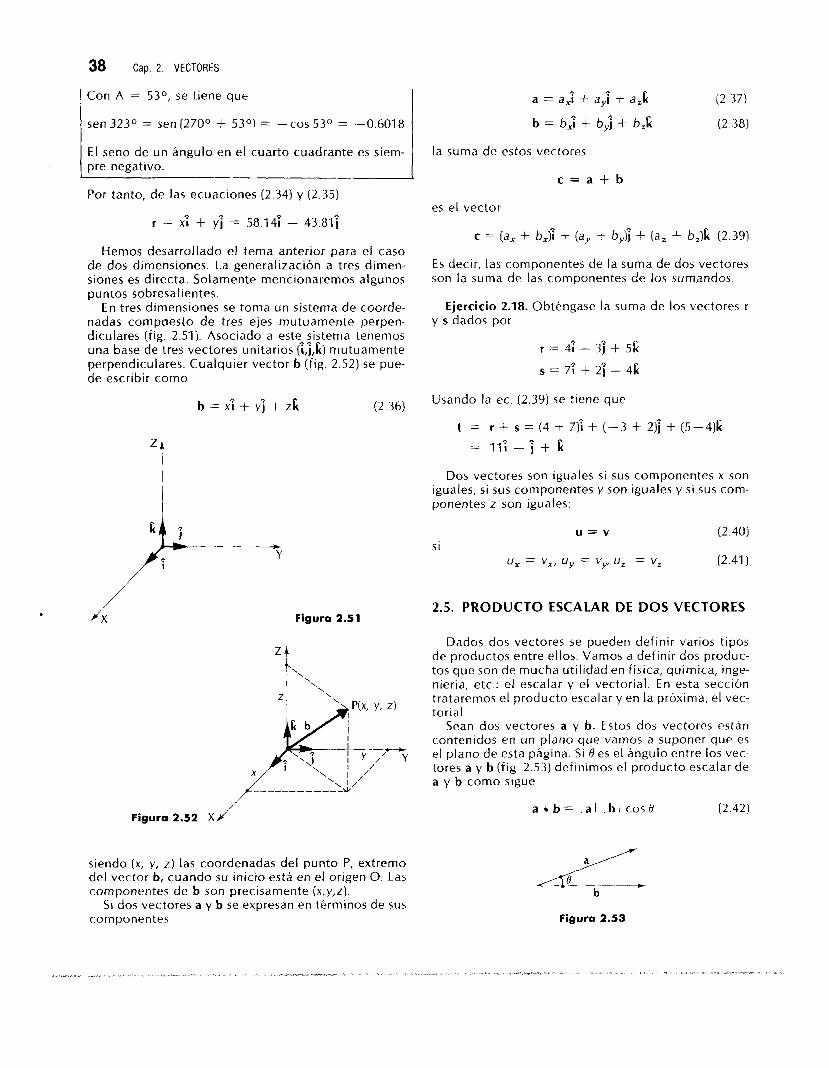
Ejercicio 2.17. Un vector r tiene una magnitud de 72.8, forma un ángulo de 323O con el eje X y tiene el sentido mostrado en la figura 2.50. Encuéntrense las componentes (x,y) de r.
't
I Figura 2.50
El vector r está en el cuarto cuadrante. Usando la ec. (2.32) obtenemos x
x = I r / cos 323O = 72.8 X 0.7986 = 58.14 (2.34)
Recordando que
cos (270O + A) = sen A
se tiene en nuestro caso A = 323O -270O = 530, por lo que
cos 323O = cos (270O + 5 3 O ) = sen 5 3 O = 0.7986
E l coseno de un ángulo en el cuarto cuadrante es siempre positivo.
Usando ahora la ec. (2.33) obtenemos la componente y
Y = 1 r 1 sen 323O = 72.8 x (-0.6018) = -43.81 (2.35)
Recuérdese que
sen (270O + A) = -cos A
38 Cap. 2. VECTORES
Con A = 53O, se t iene qu t
sen 323O = sen (270O + 53O1 = -cos 53O = -0.6018
E l seno de un ángulo en el cuarto cuadrante es siem- pre negativo.
Por tanto, de las ecuaciones (2.34) y (2.35)
r = 6 + 6 = 58.14; - 43.81;
Hemos desarrollado el tema anterior para el caso de dos dimensiones. La generalización a tres dimen- siones es directa. Solamente mencionaremos algunos puntos sobresalientes.
En tres dimensiones se toma un sistema de coorde- nadas compuesto de tres ejes mutuamente perpen- diculares (fig. 2.51j. Asociado a este-sistema tenemos una base de tres vectores unitarios (i,j,G) mutuamente perpendiculares. Cualquier vector b (fig. 2.52) se pue- de escribir como
b = G + d + z G (2.36)
4 Figura 2.51
\
Figura 2.52 X /
siendo (x, y, z) las coordenadas del punto P, extremo del vector b, cuando su inicio está en el origen O. Las componentes de b son precisamente (x,y,z).
S i dos vectores a y b se expresan en tkrminos de s u s componentes
a = a,; + ay; + a,G
b = b,; + by; + b,k
la suma de estos vectores
c = a + b
es el vector
c = (a, + b,$ + (a, + by$ + (a , + b,)C( (2.391
E s decir, las componentes de la suma de dos vectores son la suma de las componentes de los sumandos.
Ejercicio 2.18. Obténgase la suma de los vectores r y S dados por
r = 4 1 - 3 1 + 5 G
S = 71 + 21 - 4G
Usando la ec. (2.39) se tiene que
t = r + S = (4 + 78 + (-3 + 2$ + (5-4)G = II? - 1 + C
Dos vectores son iguales s i sus componentes x son iguales, s i sus componentes y son iguales y s i sus com- ponentes z son iguales:
u = v (2.40) s i
- u, = V I , uy - vy, u, = v, (2.41)
2.5. P R O D U C T O ESCALAR DE DOS VECTORES
Dados dos vectores se pueden definir varios tipos de productos entre ellos. Vamos a definir dos produc- tos que son de mucha utilidad en física, química, inge- niería, etc.: el escalar y el vectorial. En esta sección trataremos el producto escalar y en la próxima, el vec- torial.
Sean dos vectores a y b. E s t o s dos vectores est6n contenidos en un plano que vamos a suponer que es el plano de esta página. S i 8 es el ángulo entre los vec- tores a y b (fig. 2.53) definimos el producto escalar de a y b como sigue
a b = la1 lb1 cos0 (2.42)
L b
Figuro 2.53
(2.37)
(2.38)

es decir, es el producto de las magnitudes de cada uno de los vectores a y b con el coseno del ángulo que forman. Se denotará este producto por un punto cen- tral entre los vectores. Haremos algunos comentarios.
1. E l producto escalar de dos vectores es u n escalar. Recuérdese que las magnitudes de los vectores a y b ( I a I y 1 b I , respectivamente) son escalares; ade- más, el coseno de un ángulo también es un escalar.
2. Dado que las magnitudes l a / y I b l son siempre cantidades positivas, el signo que tenga a b será el del coseno de 8.
3. De la definición se tiene que
a . b = b * a (2.43)
es decir, el producto escalar es conmutativo. Esto es claro, ya que
b a = Ib l l a / cos 0
porque 0 es también el ángulo entre b y a. Pero esta última expresión es igual a la dada en la ec. (2.42).
Ejercicio 2.19. La magnitud del vector a es 3.5, la de b es 4.7. S i el ángulo entre a y b es 69O, jcuál es el pro- ducto escalar de a y b?
Se tiene que
la1 = 3.5, lb1 = 4.7 y 8 = 69O
E l producto escalar es (véase ec. (2.42))
a * b = la1 lb1 C O S O = 3.5 x 4.7 X cos69O
= 16.45 X 0.3584 = 5.90
E l producto escalar es 5.90
Ejercicio 2.20. S i los vectores a y b del ejercicio an- terior formaran un ángulo de goo, >cuál sería su pro- ducto escalar?
En este caso tendría que
tal = 3.5, lb1 = 4.7 y 8 = 90°
por lo que
a b = l a ! ! b l c o s o = 3.5 x 4.7 x cosgoo = 16.45 X O = O
ya que cos 90° = O.
Concluimos que s i dos vectores a y b son perpen- diculares (fig. 2.54) su producto escalar es cero.
Nótese que en el lado izquierdo de la última ecuación ninguno de los factores es cero. Este hecho es distinto al caso familiar en que tratando con núme- ros, la única forma de que un producto se anule es que al menos uno de los factores sea cero.
PRODUCTO ESCALAR DE DOS VECTORES 39
distinto a O) son perpendiculares, calcúlese su produc- t o escalar. S i se obtiene cero, entonces los vectores
Ejercicio 2.21. Si los vectores del ejercicio 2.19 for-
En este caso se tiene que man un ángulo de O o , jcuál es el producto escalar?
/ a l = 3.5, lb1 = 4.7 y 0 = O o
E l producto escalar es (véase ec. (2.42))
a * b = la1 Ibl c o s e = 3.5 X 4.7 X cosoo
= 16.45 X 1 = 16.45
ya que cos O o = 1.
En este caso los vectores a y b son paralelos y se tiene entonces que
a b = / a / lb1 (2.44)
En el caso particular en que a = b entonces esta úl- t ima ecuación queda como
a a = / a l l a / = / a l 2
y sacando raíz cuadrada
Ia I = J..;l (2.45)
La magnitud de un vector es igual a la raíz cuadrada del producto escalar del vector consigo mismo.
S i a = b entonces el ángulo entre a y b es O O . E l án- gulo entre un vector y éI mismo es 00. I
Ejercicio 2.22. S i los vectores del ejercicio 2.19 for- maran un ángulo de 180°, jcuál sería su producto es- calar?
Tenemos que
/ a \ = 3.5, lb1 = 4.7 y 0 = 180°
I
a l L b
Figura 2.54

40 Cap. 2. VECTORES
E l producto escalar es (véase ec. (2.42)) Ejercicio 2.23. Sean los vectores
a b = ( a / ( b l C O S O = 3.5 x 4.7 x cos180° = 16.45 X ("1) = -16.45
ya que cos 180° = -1
En este caso los vectores a y b son antiparalelos. E l producto escalar resulta ser un número negativo.
Supóngase que se expresan dos vectores (tridi- mensionales) en términos de sus componentes. Por ejemplo,
a = a,; + ay; + a,G (2.46)
Y b = b,? + by] + b,G (2.47)
a = 3? - 4 + 4G
b = 24 + 8; - 2k Y
Calcular a b.
Comparando estas expresiones con las ecs. (2.46) y (2.47) tenemos que
a, = 3, ay = -4, a , = 4 b, 2, by = 8, b, = -2
Usando la ec. (2.53) obtenemos que
a * b = 3 X 2 + ( - 4 ~ X 8 + 4 X 1 - 2 ) ,~ . , Calcularemos el producto escalar a b. Usando estas expresiones tenemos que
= 6 - 32 -8 = -34
Si conocemos el vector a en terminos de su5 com- a b = (a,: + ay; + a,G) (b,? + by; + b&) ponentes, como por ejemplo, la ec. (2.46), podemos
calcular su magnitud con ayuda de la ec. (2.45). En Desarrollando los paréntesis del lado derecho efecto, usando la ec. (2.53) con a = b
a - a = a d x + ag, + &az = af + a; + a< (2.54)
+ azb,G "i+a.byG *;+a,b,k li (2.481 Sustituyendo este en la ec. (2.45) nos da
Ahora bien, el producto (2.55)
n n
i . j = O (2.491 Ejercicio 2.24. Calcular la magnitud del vector
ya que? y; son perpendiculares (véase fig. 2.51). Por la misma razón
a = -24 + 4 + 5G
T . C = ~ . C = O (2.50) En este caso tenemos que
Por otro lado, de la ec. (2.42) a, = -2, ay = 3, a , = 5
4 0 4 = I i l I i I cos 4 Sustituyendo estos valores en la ec. (2.55) obtenemos que
con 4 el anguIo_ entre ? e 1; pero 4 = 00 y cos 4 = I. Además, como i es un vector unitario (véase ec. (2,16)), / a ( = J(-2)2 + 32 + 52 = d4 + 9 + 25 14 1 = 1. Por tanto, la últ ima ecuación queda como
" = J38= 6.16 i * i = l x l x l = l (2.51)
Ejercicio 2.25. Encontrar el ángulo que forman a y b Por el mismo motivo s i
Sustituyendo los resultados (2.49)-(2.52) en (2.48) ob- b = 8; + 7] i- 2k (2.57) tenemos que
De la ec. (2.42) se tiene que a b = axbx + ayby + azbz (2.53)
Conociendo las componentes de a y b se puede calcu- lar su producto escalar por medio de este resultado. De esta ecuación despejamos cos 0
a b = / a l lb1 cos0 (2.58)
PRODUCTO VECTORIAL DE DOS VECTORES 41
Véase apéndice I con P = a b,a = la1 lb1 y u = cos 8.
COS e = a * b l a / lb1 (2.59)
Este resultado nos dice que podemos encontrar cos 0 (y de aquí 0, el ángulo entre a y b) s i conocemos a b,
1 a I y 1 b I , Podemos calcular estas cantidades s i cono- cemos los vectores a y b. En efecto, de (2.56) y (2.57) tenemos que
a, = 4, a,, = 3, a , = -2 (2.60)
b, = 8, by = 7, b, = 2 (2.61)
1. a b. Sustituyendo (2.60) y (2.61) en la ec. (2.53)
Y
nos da
a * b = 4 X 8 + 3 X 7 + ( - 2 ) X 2 = 3 2 + 2 1 - 4 = 49 (2.62)
2. l a l . Sustituyendo (2.60) en la ec. (2.55) obtene- m os
/ a l = 44 ’ + 3’ + (-2)’ = 4 1 6 + 9 + 4
= a= 5.385 (2.63)
3. I b l . Sustituyendo (2.61) en la ec. (2.55) encontra- mos
IbI 1 J82 + 7’ + 2’ = d 6 4 + 49 + 4
= = 10.817 (2.64)
Ahora sustituimos (2.62)-(2.64) en la ec. (2.59)
cos e = 49 - _”
5.385 X 10.817 58.25 49 - 0.8412
De aquí se tiene entonces que
e = arc cos 0.841 2 = 32O43 ‘58‘ ‘
2.6. PRODUCTO VECTORIAL DE DOS VECTORES
Consideremos ahora otro tipo de producto entre vectores. Sean dos vectores a y b. Definimos el pro- ducto vectorial de a y b, que denotaremos como a x b, como un nuevo vector c
c = a X b (2.65)
E l producto escalar nos da como resultado un esca- lar; el producto vectorial produce un vector.
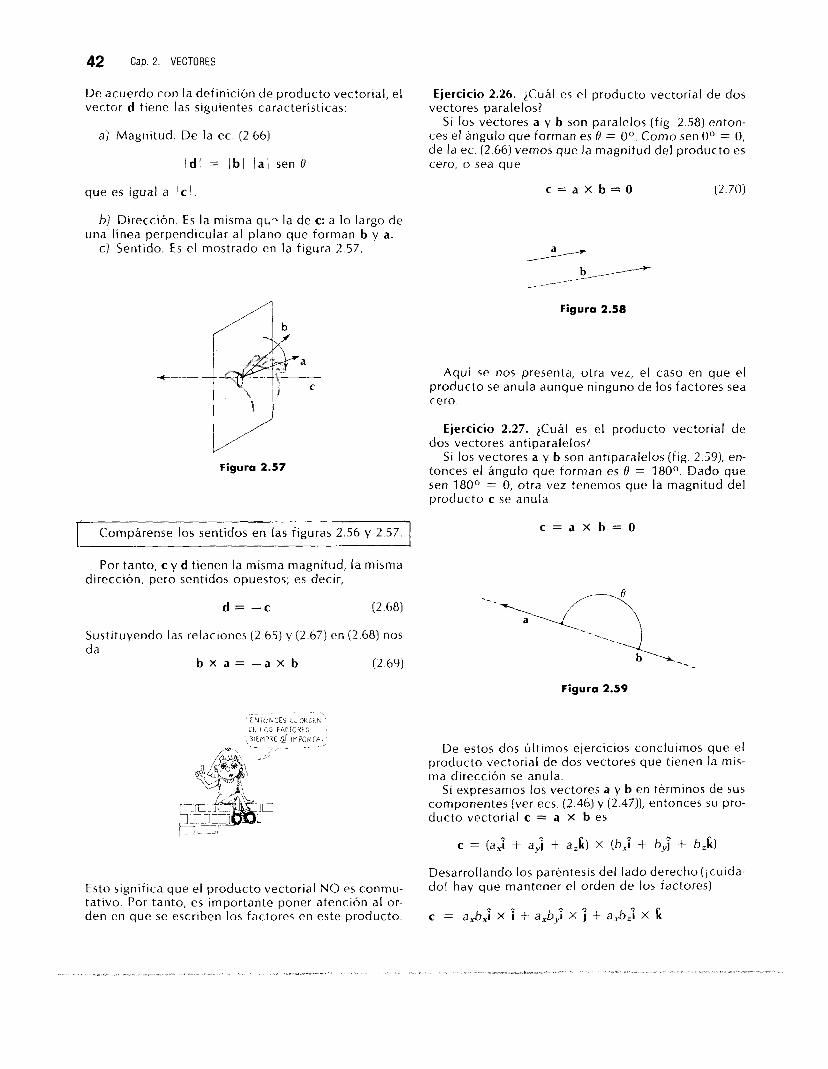
con las características siguientes:
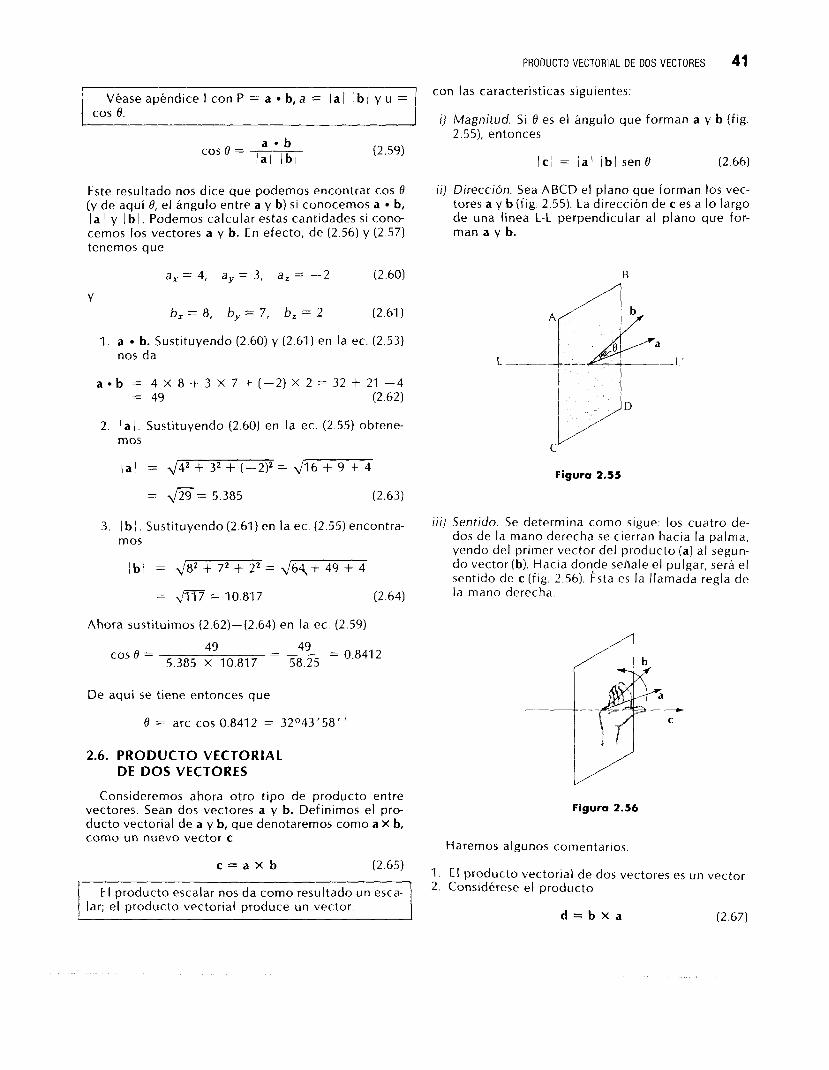
i) Magnitud. S i 0 es el ángulo que forman a y b (fig. 2.55), entonces
I C / = la1 lb1 sen0 (2.66)
ii) Dirección. Sea ABCD el plano que forman los vec- tores a y b (fig. 2.55). La dirección de c es a lo largo de una línea L-L perpendicular al plano que for- man a y b.
B
L
D
C
Figura 2.55
iii) Sentido. Se determina como sigue: los cuatro de- dos de la mano derecha se cierran hacia la palma, yendo del primer vector del producto (a) al segun- do vector (b). Hacia donde señale el pulgar, será el sentido de c (fig. 2.56). Esta es la llamada regla de la mano derecha.
Figura 2.56
Haremos algunos comentarios
1. E l producto vectorial de dos vectores es un vector 2. Considérese el producto
d = b x a (2.67)
42 Cap. 2. VECTORES
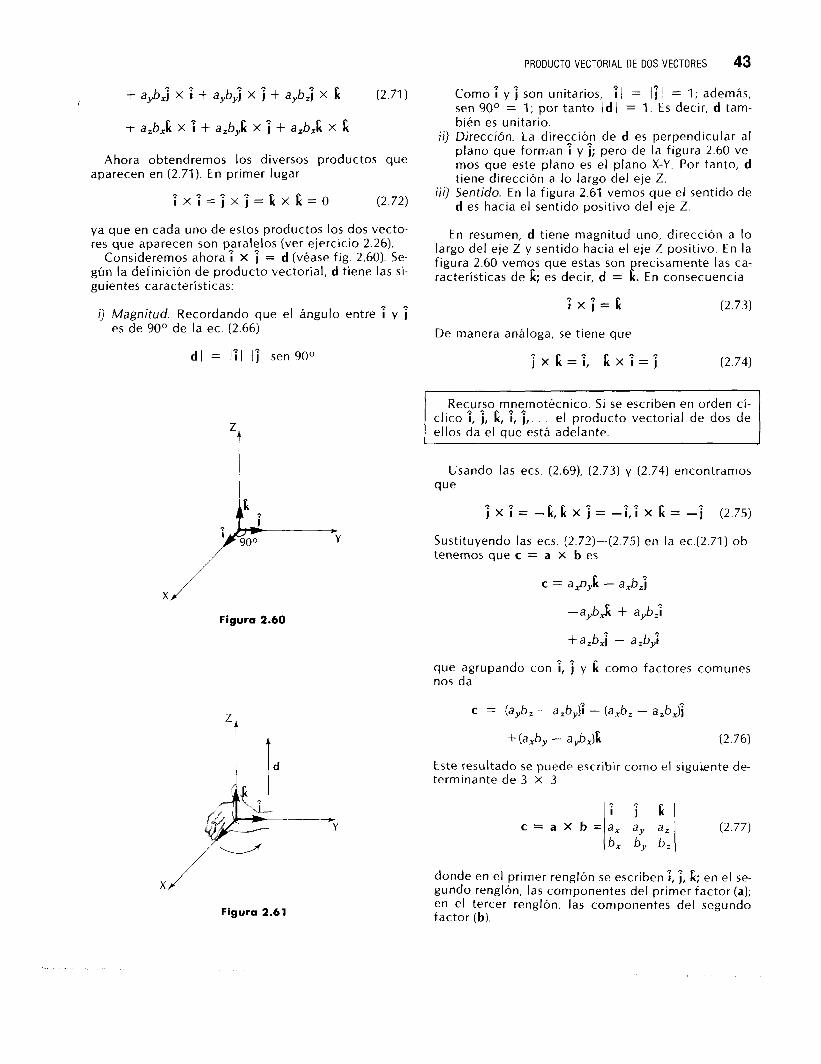
De acuerdo con la definición de producto vectorial, el Ejercicio 2.26. iCuál es el producto vectorial de dos vector d tiene las siguientes características: vectores paralelos?
S i los vectores a y b son paralelos (fig. 2.58) enton- a) Magnitud. De la ec. (2.66) ces el ángulo que forman es O = O O . Como sen Oo = O,
de la ec. (2.66) vemos que la magnitud del producto es Id1 = lb1 la1 sen O cero, o sea que
que es igual a I C l . c = a x b = O (2.70)
b] Dirección. Es la misma qL0 la de c: a lo largo de
c) Sentido. E s el mostrado en la figura 2.57. una línea perpendicular al plano que forman b y a.
Figura 2.57
I Compárense los sentidos en las figuras 2.56 y 2.57. I Por tanto, c y d tienen la misma magnitud, la misma
dirección, pero sentidos opuestos; es decir,
d = "C (2.68)
Figura 2.58
Aquí se nos presenta, otra vez, e l caso en que el producto se anula aunque ninguno de los factores sea cero.
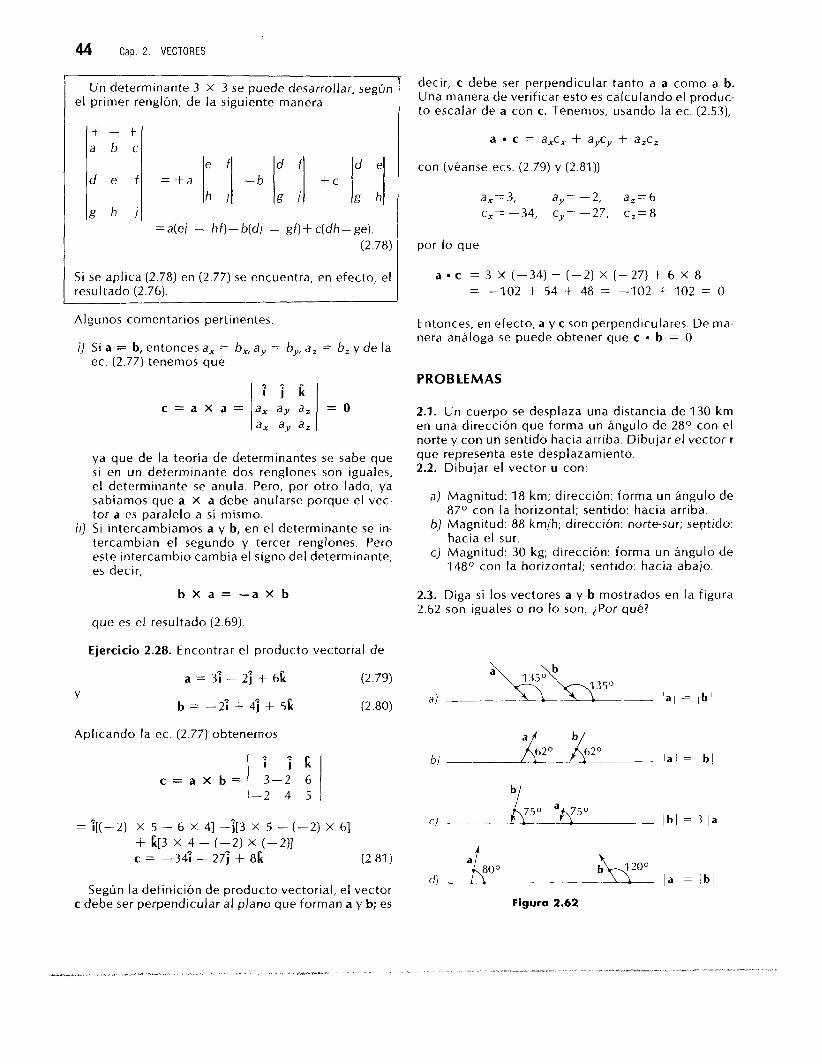
Ejercicio 2.27. iCuál es el producto vectorial de dos vectores antiparalelos?
S i los vectores a y b son antiparalelos (fig. 2.59), en- tonces el ángulo que forman es O = 180O. Dado que sen 180° = O, otra vez tenemos que la magnitud del producto c se anula
c = a X b = O
Sustituyendo las relaciones (2.65) y (2.67) en (2.68) nos da
b X a = - a x b (2 69)
Figura 2.59
~~
' ENTCNCES tLORDFN
, X L O S FACTORES
[ - i L " J !
E s t o significa que el producto vectorial NO es conmu- tativo. Por tanto, es importante poner atención al or- den en que se escriben los factores en este producto.
De estos dos últimos ejercicios concluimos que el producto vectorial de dos vectores que tienen la mis- ma dirección se anula.
S i expresamos los vectores a y b en términos de sus componentes (ver ecs. (2.46) y (2.47)), entonces su pro- ducto vectorial c = a X b es
c = (ax; + a,,; + azk) X (bxl + by; + b,L)
Desarrollando los paréntesis del lado derecho (¡cuida- do! hay que mantener el orden de los factores)
c = a,bx; X i + axby: X 7 + a,bd x C
I
t a,b& X I + a,b,G X 7 + a,b,G X G
Ahora obtendremos los diversos productos que aparecen en (2.71). En primer lugar
ya que en cada uno de estos productos los dos vecto- res que aparecen son p_aralelos (ver ejercicio 2.26).
Consideremos ahora i x j = d (véase fig. 2.60). Se- gún la definición de producto vectorial, d tiene las si- guientes características:
i) Magnitud. Recordando que el ángulo entre i y 7 es de 90° de la ec. (2.66)
zt
X J
Figura 2.60
zt
X J Figura 2.61
PRODUCTO VECTORIAL DE DOS VECTORES 43
Como i y 7 son unitarios, l i l = I l l = 1; además, sen 90° = I; por tanto Id1 = 1. E s decir, d tam- bién es unitario.
ii) Dirección. La direcció? de d es perpendicular al plano que forman i y j; pero de la figura 2.60 ve- mos que este plano es el plano X-Y. Por tanto, d tiene dirección a lo largo del eje Z.
i i i ) Sentido. En la f igura 2.61 vemos que el sentido de d es hacia el sentido positivo del eje Z.
En resumen, d t iene magnitud uno, dirección a lo largo del eje Z y sentido hacia el eje Z positivo. En la figura 2.60 vemos que estas son recisamente las ca- racterísticas de k; es decir, d = t. En consecuencia
e , .
¡ x i = & (2.73)
De manera análoga, se tiene que
; x i ; = ; , G x i = ; (2.74)
Rec_ur_so m_ne_rnotécnico. S i se escriben en orden cí- c l ico i, j, I;, i, j, . . el producto vectorial de dos de ellos da el que está adelante.
Usando las ecs. (2.69), (2.73) y (2.74) encontramos que
# . A
j X i = -C,k X I = -i , i X G = -7 (2.75)
Sustituyendo las ecs. (2.72)-(2.75) en la ec.(2.71) ob- tenemos que c = a X b es
e e
c = ap,C - a,b,;
-a,,b,& + ayby
+a&,; - a ,b j
que agrupando con i, 7 y & como factores comunes nos da
c = (a,b, - a&,$ - (a&, - a,b,fi
+ (axby - a,b& (2.76)
Este resultado se puede escribir como el siguiente de- terminante de 3 X 3
c = a x b = a , ay a , I:, :y b, (2.77)
donde en el primer renglón se escriben I, 7, G; en el se- gundo renglón, las componentes del primer factor (a); en el tercer renglón, las componentes del segundo factor (b).
44 Cap . 2. VECTORES
- r Un determinante 3 X 3 se puede desarrollar, según
el primer renglón, de la siguiente manera
+ - + a b c
d e f = + a 1: I/ "b
d f d e
g j + c lg hl g h i
=a(ej - hi)-b(dj - gf)+c(dh-ge). (2.78)
Si se aplica (2.78) en (2.77) se encuentra, en efecto, el resultado (2.76).
decir, c debe ser perpendicular tanto a a como a b. Una manera de verificar esto es calculando el produc- to escalar de a con c. Tenemos, usando la ec. (2.53),
a c = a,c, + aYcy + a,c,
con (véanse ecs. (2.79) y (2.81))
ax= 3, ay= -2, a,=6 cX= -34, cy= -27, ~ , = 8
por lo que
Algunos comentarios pertinentes.
i] Si a = b, entonces a, = b,, ay = b,, a, = b, y de la ec. (2.77) tenemos que
i;C
a, ay a, c = a x a = = O a,aya,
ya que de la teoría de determinantes se sabe que s i en un determinante dos renglones son iguales, el determinante se anula. Pero, por otro lado, ya sabíamos que a X a debe anutarse porque el vec- tor a es paralelo a sí mismo.
i i ) Si intercambiamos a y b, en el determinante se in- tercambian el segundo y tercer renglones. Pero este intercambio cambia el signo del determinante, es decir,
b x a = - a x b
que es el resultado (2.69).
Ejercicio 2.28. Encontrar el producto vectorial de
Entonces, en efecto, a y c son perpendiculares. De ma- nera análoga se puede obtener que c * b = O.
PROBLEMAS
2.1. Un cuerpo se desplaza una distancia de 130 km en una dirección que forma un ángulo de 2 8 O con el norte y con un sentido hacia arriba. Dibujar el vector r que representa este desplazamiento. 2.2. Dibujar el vector u con:
a) Magnitud: 18 km; dirección: forma un ángulo de 87O con la horizontal; sentido: hacia arriba.
b] Magnitud: 88 krnih; dirección: norte-sur; sentido: hacia el sur.
c) Magnitud: 30 kg; dirección: forma un ángulo de 148O con la horizontal; sentido: hacia abajo.
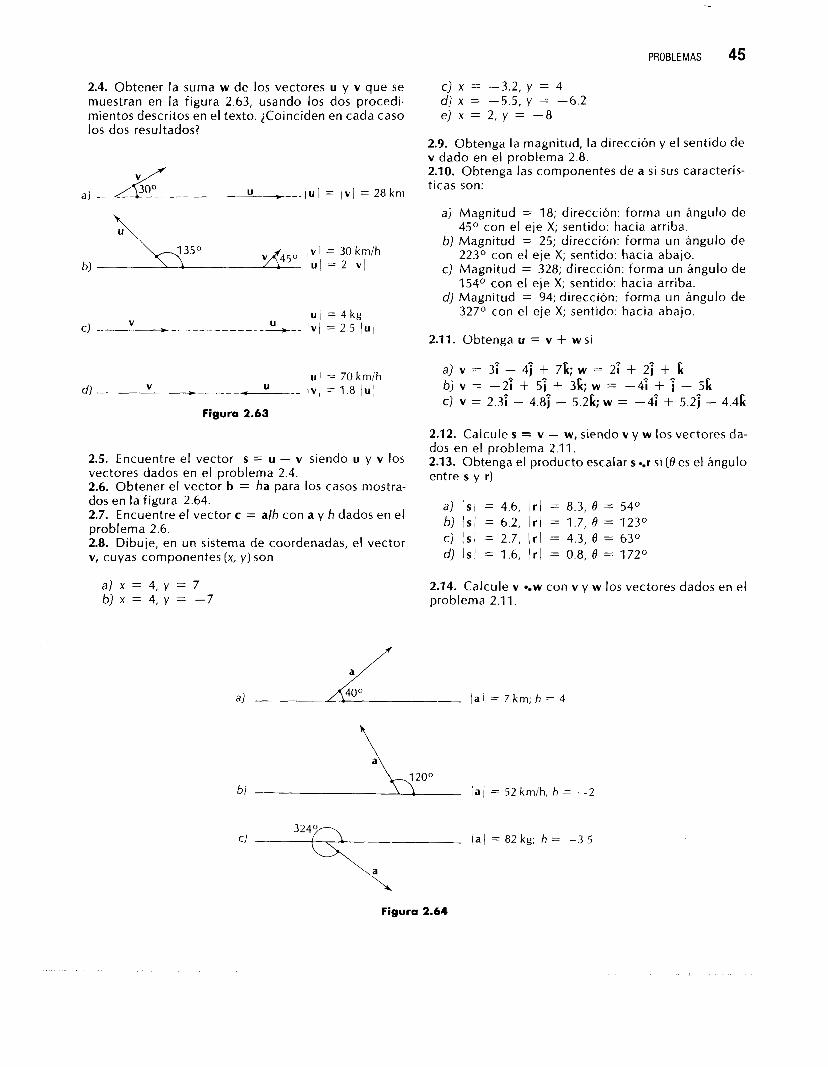
2.3. Diga s i los vectores a y b mostrados en la figura 2.62 son iguales o no lo son. ¿Por qué?
Y
Aplicando la ec. (2.77) obtenemos a f b/
= ;[(-2) X 5 - 6 X 41 "7[3 X 5 - (-2) X 61 C i lb ] = 3 / a l
+ C[3 x 4 - (-2) x (-2)] c = "34; - 27; + 8k (2.81)
Según la definición de producto vectorial, el vector dl la1 = lb1
c debe ser perpendicular a l plano que forman a y b; es Figura 2.62
-
PROBLEMAS 45
2.4. Obtener la suma w de los vectores u y v que se muestran en la figura 2.63, usando los dos procedi- mientos descritos en el texto. iCoinciden en cada caso los dos resultados?
/ u / = 70 km/h d) V U _ _ "_ - c"--- / Y , = 1.8 /u1
Figura 2.63
2.5. Encuentre el vector S = u - v siendo u y v los vectores dados en el problema 2.4. 2.6, Obtener el vector b = ha para los casos mostra- dos en la figura 2.64. 2.7. Encuentre el vector c = alh con a y h dados en el problema 2.6. 2.8. Dibuje, en un sistema de coordenadas, el vector v, cuyas componentes (x, y) son
a) x = 4 , y = 7 b) x = 4,y = -7
C) X = -3.2, y = 4 d) X = -5.5, y -6.2 e) x = 2, y = -8
2.9. Obtenga la magnitud, la dirección y el sentido de v dado en el problema 2.8. 2.10. Obtenga las componentes de a s i sus caracterís- ticas son:
a) Magnitud = 18; dirección: forma un ángulo de
b) Magnitud = 25; dirección: forma un ángulo de
c) Magnitud = 328; dirección: forma un ángulo de
d) Magnitud = 94; dirección: forma un ángulo de
45O con el eje X; sentido: hacia arriba.
223O con el eje X; sentido: hacia abajo.
154O con el eje X; sentido: hacia arriba.
327O con el eje X; sentido: hacia abajo.
2.11. Obtenga u = v + ws i
2.12. Calcule S = v - w, siendo v y w los vectores da- dos en el problema 2.11. 2.13. Obtenga el producto escalar S r si (O es el ángulo entre S y r)
a) Is I = 4.6, I r I = 8.3, e = 540 b) Is1 = 6.2, I r / = 1.7, e = 1230 c) I s 1 = 2.7, Ir1 = 4.3, í3 = 63O dl Is/ = 1.6, Ir1 = 0.8, e = 172O
2.14. Calcule v w con v y w los vectores dados en el problema 2.11.
al l a / = 7 k m ; h = 4
\
Figura 2.64
46 Cap. 2. VECTORES
2.15. Obtenga la magnitud del vector b si
a) b = 21 + 3; f 4G b) b = - 2; - 3; - 4f( c) b = 51 - 2; + 4k d) b = 2.31 - 4.7; - 6.5L
2.16. &uá1 es el ángulo entre los vectores v y w del problema 2.1 1 ? 2.17. Obtenga u = v X w con v y w los vectores da- dos en el problema 2.11. 2.18. Verifique en cada caso del problema anterior (2.17) que u v = u w = O.
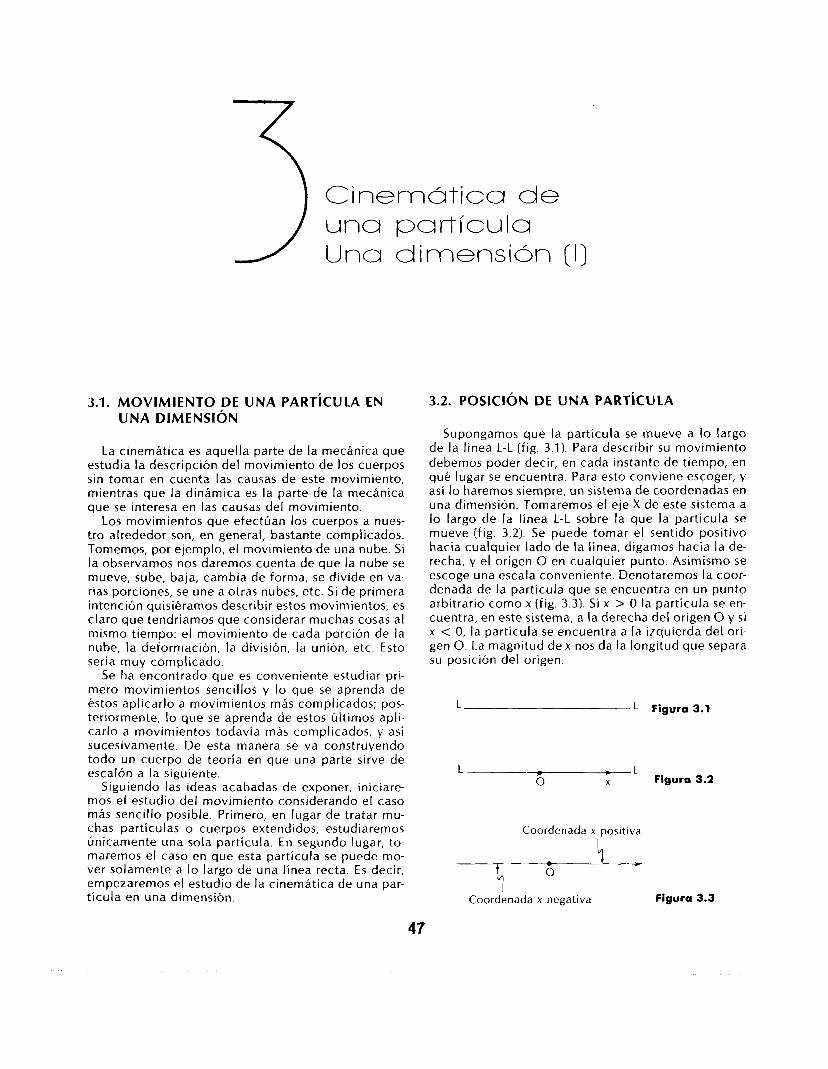
Cinemática de una particula Una dimensión ( I )
3.1. MOVIMIENTO DE UNA PARTíCULA EN UNA DIMENSIóN
La cinemática es aquella parte de la mecánica que estudia la descripción del movimiento de los cuerpos sin tomar en cuenta las causas de este movimiento, mientras que la dinámica es la parte de la mecánica que se interesa en las causas del movimiento.
Los movimientos que efectúan los cuerpos a nues- tro alrededor son, en general, bastante complicados. Tomemos, por ejemplo, el movimiento de una nube. Si la observamos nos daremos cuenta de que la nube se mueve, sube, baja, cambia de forma, se divide en va- rias porciones, se une a otras nubes, etc. Si de primera intención quisiéramos describir estos movimientos, es claro que tendríamos que considerar muchas cosas al mismo tiempo: el movimiento de cada porción de la nube, la deformación, la división, la unión, etc. Esto sería muy complicado.
Se ha encontrado que es conveniente estudiar pri- mero movimientos sencillos y lo que se aprenda de estos aplicarlo a movimientos más complicados; pos- teriormente, lo que se aprenda de estos últimos apli- carlo a movimientos todavía más complicados, y así sucesivamente. De esta manera se va construyendo todo un cuerpo de teoría en que una parte sirve de escalón a la siguiente.
Siguiendo las ideas acabadas de exponer, iniciare- mos el estudio del movimiento considerando el caso más sencillo posible. Primero, en lugar de tratar mu- chas partículas o cuerpos extendidos, estudiaremos únicamente una sola partícula. En segundo lugar, to- maremos el caso en que esta partícula se puede mo- ver solamente a lo largo de una línea recta. E s decir, empezaremos el estudio de la cinemática de una par- tícula en una dimensión.
3.2. POSICIóN DE UNA PARTíCULA
Supongamos que la partícula se mueve a lo largo de la línea L-L (fig. 3.1). Para describir su movimiento debemos poder decir, en cada instante de tiempo, en qué lugar se encuentra. Para esto conviene escoger, y así l o haremos siempre, un sistema de coordenadas en una dimensión. Tomaremos el eje X de este sistema a lo largo de la línea L-L sobre la que la partícula se mueve (fig. 3.2). Se puede tomar el sentido positivo hacia cualquier lado de la línea, digamos hacia la de- recha, y el origen O en cualquier punto. Asimismo se escoge una escala conveniente. Denotaremos la coor- denada de la partícula que se encuentra en un punto arbitrario como x (fig. 3.3). S i x > O la partícula se en- cuentra, en este sistema, a la derecha del origen O y si x < O, la partícula se encuentra a la izquierda del ori- gen O. La magnitud de x nos da la longitud que separa su posición del origen.
L Figura 3.1
L > L t, X Figura 3.2
+ Coordenada x positiva
Coordenada x negativa Figura 3.3
47
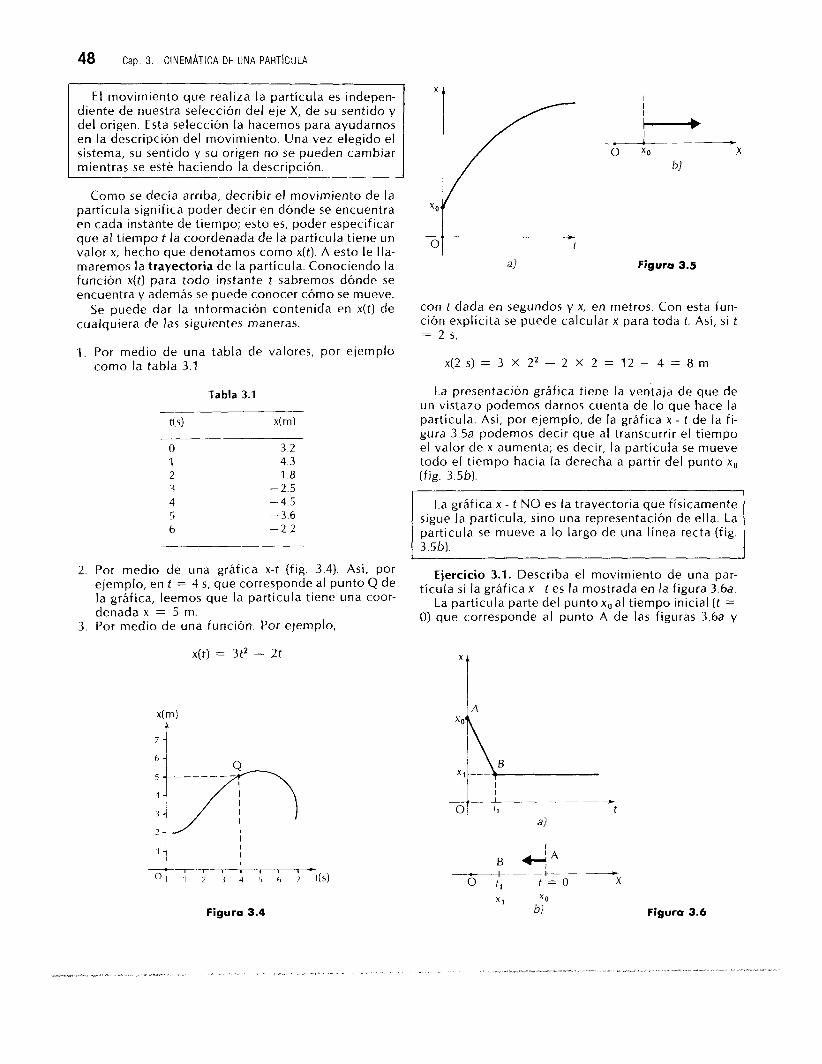
48 Cap, 3. CINEMATICA DE UNA PART/C:JLA
E l movimiento que realiza la partícula es indepen- diente de nuestra selección del eje X, de su sentido y del origen. Esta selección la hacemos para ayudarnos en la descripción del movimiento. Una vez elegido el sistema, su sentido y su origen no se pueden cambiar mientras se esté haciendo la descripción.
Como se decía arriba, decribir el movimiento de la partícula significa poder decir en dónde se encuentra en cada instante de tiempo; esto es, poder especificar que al t iempo t la coordenada de la partícula tiene un valor x, hecho que denotamos como x(t). A esto le Ila- maremos la trayectoria de la partícula. Conociendo la función x(t) para todo instante t sabremos dónde se encuentra y además se puede conocer cómo se mueve.
Se puede dar la información contenida en x(t) de cualquiera de las siguientes maneras.
1. Por medio de una tabla de valores, por ejemplo como la tabla 3.1
Tabla 3.1
t ( s ) x(m)
O 3 . 2 1 4.3 2 1.8 3 " 2 . 5 4 -4.5 5 - 3.6 6 -2.2
2. Por medio de una gráfica x-t (fig. 3.4). Así, por ejemplo, en t = 4 S , que corresponde al punto Q de la gráfica, leemos que la partícula tiene una coor- denada x = 5 m.
3. Por medio de una función. Por ejemplo,
x(t) = 3tZ - 2t
Figura 3.4
X
Figuro 3.5
con t dada en segundos y x, en metros. Con esta fun- ción explícita se puede calcular x para toda t . Así, s i t = 2 S,
x ( 2 s ) = 3 X 2 2 - 2 X 2 = 1 2 - 4 = 8 m m .
La presentación gráfica tiene l a ventaja de que de un vistazo podemos darnos cuenta de lo que hace la partícula. Así, por ejemplo, de la gráfica x - t de la fi- gura 3.5a podemos decir que al transcurrir el tiempo el valor de x aumenta; es decir, la partícula se mueve todo el t iempo hacia la derecha a part ir del punto x. (fig. 3.5b) .
La gráfica x - t NO es la trayectoria que físicamente sigue la partícula, sino una representación de ella. La partícula se mueve a lo largo de una línea recta (fig. 3.56).
Ejercicio 3.1. Describa el movimiento de una par- tícula si la gráfica x - t es la mostrada en la figura 3.6a.
La partícula parte del punto x. al t iempo inicial ( t = O) que corresponde al punto A de las figuras 3.6a y
x t
x1 X 0 bl Figura 3.6
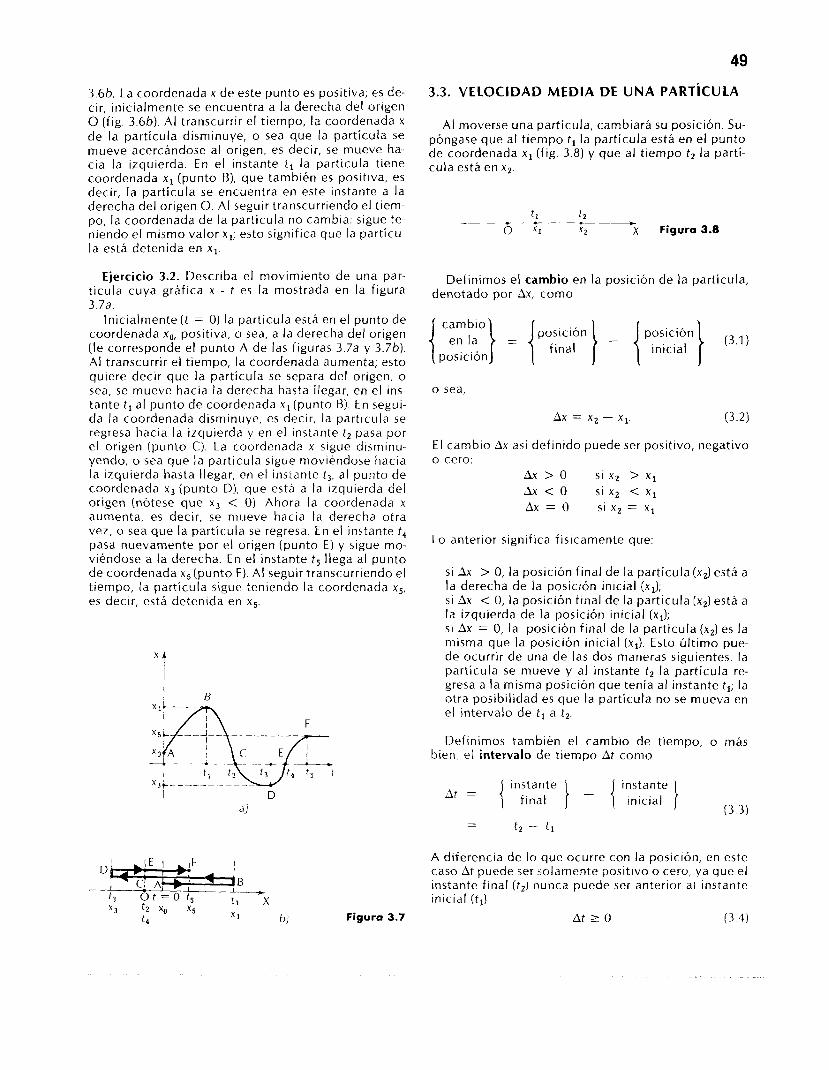
49
3.6b. La coordenada x de este punto es positiva; es de- cir, inicialmente se encuentra a la derecha del origen O (fig. 3.6b). AI transcurrir el tiempo, la coordenada x de la partícula disminuye, o sea que la partícula se mueve acercándose al origen, es decir, se mueve ha- cia la izquierda. En el instante t, la partícula tiene coordenada x1 (punto B), que también es positiva, es decir, la partícula se encuentra en este instante a la derecha del origen O. AI seguir transcurriendo el tiem- po, la coordenada de la particula no cambia: sigue te- niendo el mismo valor x,; esto significa que la partícu- la está detenida en xl.
Ejercicio 3.2. Describa el movimiento de una par- tícula cuya gráfica x - t es la mostrada en la figura 3.7a.
Inicialmente ( t = O) la partícula está en el punto de coordenada x,,, positiva, o sea, a la derecha del origen (le corresponde el punto A de las figuras 3.7a y 3.7b). AI transcurrir el tiempo, la coordenada aumenta; esto quiere decir que la partícula se separa del origen, o sea, se mueve hacia la derecha hasta llegar, en el ins- tante t, al punto de coordenada x1 (punto 6). En segui- da la coordenada disminuye, es decir, la particula se regresa hacia la izquierda y en el instante t2 pasa por el origen (punto C). La coordenada x sigue dlsminu- yendo, o sea que la partícula sigue movikndose hacia la izquierda hasta llegar, en el instante t 3 , al punto de coordenada x 3 (punto D), que está a la izquierda del origen (nótese que x g < O). Ahora la coordenada x aumenta, es decir, se mueve hacia la derecha otra vez, o sea que la partícula se regresa. En el instante t , pasa nuevamente por el origen (punto E) y sigue mo- viéndose a la derecha. En el instante t5 l lega al punto de coordenada x,(punto F). AI seguir transcurriendo el t iempo, la partícula sigue teniendo la coordenada x5, es decir, está detenida en x 5
x t I B
3.3. V E L O C I D A D M E D I A DE U N A P A R T í C U L A
AI moverse una partícula, cambiará su posición. Su- póngase que al tiempo t , la partícula está en el punto de coordenada x, (fig. 3.8) y que a l t iempo t2 la partí- cula está en x2.
Definimos el cambio en la posición de la partícula, denotado por Ax, como
en la = "9:1,:::" - pz::n (3.1) cambio
posición
o sea,
AX = X, - XI. ( 3 . 2 )
E l cambio Ax así definido puede ser positivo, negativo o cero:
AX > O SI X, > X,
AX < O s i X, < X,
AX = O s i X, = XI
Lo anterior significa físicamente que:
s i Ax > O, la posición final de la partícula (x,) está a la derecha de la posición inicial (x,); s i Ax < O, la posición final de la partícula (x,) está a la izquierda de la posición inicial (x1); s i Ax = O, la posición final de la partícula (x,) es la misma que la posición inicial (x,). Esto últ imo pue- de ocurrir de una de las dos maneras siguientes: la partícula se mueve y al instante t2 la partícula re- gresa a la misma posición que tenía al instante tl; la otra posibilidad es que la partícula no se mueva en el intervalo de tl a t,.
Definimos también el cambio de tiempo, o más bien, e / intervalo de t iempo At como
A diferencia de lo que ocurre con la posición, en este caso At puede ser solamente positivo o cero, ya que el instante final (tz) nunca puede ser anterior al instante inicial ( t J
Figura 3.7 At 2 O ( 3 4)

50 Cap. 3 CINEMÁTICA DE UNA PART~CULA
E l cambio lo definiremos siempre como
(cambiode. . ) = ( . . f inal) - ( . . inicial) (3.5)
Supóngase que se tienen dos partículas, la A y la 8, y que ambas están en el punto x1 en el instante tl (fig. 3.9); al transcurrir el tiempo, las dos partículas se mue-
- B Y B A , u A
0 '1 xA +
X B X t, t 2
Figura 3.9
ven. La partícula A llega en el instante t 2 a la posición x A , mientras que la partícula B llega, en el mismo ins- tante t2, a la posición X,. Calculemos los cambios de posición y de tiempo para cada partícula (véase ec. (3.2)).
Partícula A
intervalo instante
PO de A de A (At), = de t iem- = final -
Partícula B
cambio posición posición
posición de B ( A X ) , = [ de 1 = final - ¡::¡;I
(Ax), = x g - x1 (3.8)
de B
intervalo instante instante
PO de E de 8 de B (At), = de t iem-= final - inicial
Comparando (3.7) y (3.9) vemos que sus lados de- rechos son iguales, por lo que
(At), (At), (3.10)
Las dos partículas se movieron durante el mismo in- tervalo de tiempo.
Si ahora comparamos las ecs. (3.6) y (3.8) y vemos la figura 3.9 concluimos que
(Ax), > (Ax), (3.11)
O sea, la partícula B recorrió una distancia mayor que la A, en el mismo intervalo de tiempo. Decimos que la partícula B se movió más rápidamente que la partícu- la A; alternativamente se dice que la par- tícula A se movió más lentamente que la partícula B.
La discusión anterior nos indica que en el movi- miento de una particula, además de especificar su po- sición, va involucrado el concepto de rapidez (o de lentitud), Definimos la velocidad media T7 de una par- tícula que experimenta un cambio de posición Ax en el intervalo At como
(3.1 2)
Se pu_ecje definir también el concepto de lentituc media I como
Con este concepto se podría desarrollar la mecánica. Sin embargo, resulta más conveniente hacerlo con el concepto de velocidad.
Regresemos al caso de las partículas A y E que con- sideramos arriba. Las velocidades medias de estas partículas son
Ahora bien, los denominadores son iguales (ec. (3.10)), mientras que el numerador de V, es más grande que el numerador de ?A (véase ec. (3.11)). Por tanto,
E s decir, la definición (3.12) nos representa el concepto de rapidez de una partícula porque asigna un mayor valor de la velocidad a la partícula que recorrió una distancia mayor en el mismo intervalo de tiempo.
En la ec. (3.12) se nos presenta, por primera vez, una cantidad que es combinación de las cantidades bási- cas Ax y At. Las dimensiones de v s o n (véase ec. (1.42)) L/T. Las unidades de la velocidad en el Sistema Inter- nacional son mis.

VELOCIDAD MEDIA Dt UNA PARTiCULA 51
En el cociente de (3.12), At es siempre positiva, De la ec. (3.12) encontramos que mientras que Ax puede tener cualquier signo; por tan- to, Ytiene el signo que tenga Ax. Ahora bien (fig. 3.10)
- v > o
__I, Intervalo de 1 S a 2 S (At = 1 S ) . En este caso se tiene que
o x 1 x2 x x i n i c . = 4.3 m xf inal = 1.8 m
I;<O t
o x2 + x
+ X
" . " o x2 X
por lo que
Ax = x f i n a l - x i n i c . = 1.8 m - 4.3 m = -2.5 m
que nos da
- Ax - -2.5 m v = - - At I s = -2.5 mis
Intervalo de 2 S a 3 S (At = 1 S ) . Se tiene que
x i n i c . = 1.8 m x f i n a l = -2.5 m
por lo que
Figura 3.10 Ax = x f i n n l - x i n i c . = -2.5 m - 1.8 m = " 4 . 3 - m
Las coordenadas x son cantidades algebraicas, es si Ax > O (el desplazamiento ocurre hacia la dere- cha), entonces V > O,
decir, van acornpanadas de su signo.
si Ax < O (el desplazamiento ocurre hacia la iz- quierda), entonces Y < O, s i Ax = O (o no hay desplazamiento o al final del in- tervalo la partícula regresa a su posición inicial), en- tonces V = O.
De lo anterior concluimos que el signo de la veloci- dad nos indica el sentido hacia donde se mueve la partícula.
Conociendo la trayectoria de una partícula, es de- cir, x ( t ) (ya sea en forma de tabla de valores numéri- cos, de una gráfica x - t o de la función x(t)) se puede encontrar la velocidad media para diversos intervalos de tiempo.
Ejercicio 3.3. Calcule la velocidad media v de una partícula para la cual x ( [ ) está dada por la tabla 3.1 Haga los cálculos con At = 1 S , 2 S y 3 s.
Tomemos primero At = 1 S, es decir, intervalos de tiempo de 1 s. Esto significa considerar los instantes sucesivos O, 1 S , 2 S , 3 S , 4 S y 5 s. Intervalo de O a 1 S (At = 1 S ) . En este caso, vemos de la tabla 3.1 que
x i n i c . = 3.2 m x f i n a l = 4.3 m
por lo que, usando la definición (3.5)
La velocidad media en este intervalo es
- Ax - -4.3 m V E "
At I s = -4.3 m/s
De manera análoga se encuentra que
en el intervalo de 3 S a 4 s. V = "2 mls en el intervalo de 4 S a 5 s. V = 0.9 mls en el intervalo de 5 S a 6 S , V = 1.4 m/s
Calculemos ahora la velocidad media en intervalos de 2 s. Esto significa considerar los instantes O, 2 S , 4 S y 6 s.
En el intervalo de O a 2 S (At = 2 S ) se tiene que
x i n i c . = 3.2 m x f i n a l = 1.8 m
por lo que
y la velocidad media es
- Ax - -1.4 m v = - -
At 2 s = -0.7 mls
Ax = x f i n a l - x i n i c . = 4.3 m - 3.2 m = 1.1 m En el intervalo de 2 S a 4 S (At = 2 S ) se tiene que
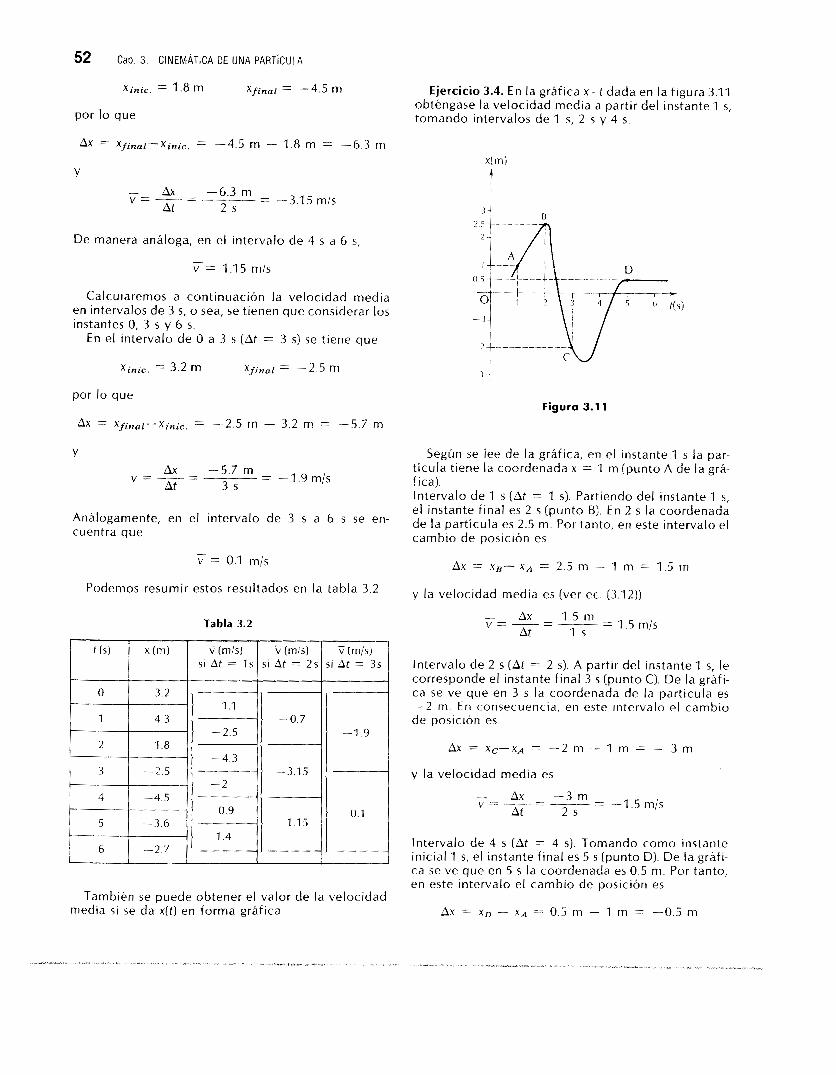
por lo que
Ax = x f i n a l - x i n i c , = -4.5 m - 1.8 m = -6.3 m
- - -6.3 m v = - - = -3.15 mis At 2 s
De manera análoga, en el intervalo de 4 S a 6 S,
- v = 1.15 mis
Calcularemos a continuación la velocidad media en intervalos de 3 S, o sea, se tienen que considerar los instantes 0, 3 S y 6 s.
En el intervalo de 0 a 3 S (At = 3 S) se tiene que
x i n i c . = 3.2 m x f j n a [ = -2.5 m
por lo que
Ax = x f i n a [ - x i n i c , = -2.5 m - 3.2 m = -5.7 m
Y AX - -5.7 m At 3 s
v = - - = -1.9 mis
Tabla 3.2
Ejercicio 3.4. En la gráfica x - t dada en la f igura 3.11 obténgase la velocidad media a partir del instante 1 S, tomando intervalos de 1 S, 2 S y 4 s.
Figura 3.1 1
Según se lee de la gráfica, en el instante I S la par- tícula tiene la coordenada x = 1 m (punto A de la grá- fica). Intervalo de 1 S (A t = 1 S). Partiendo del instante I S, el instante final es 2 S (punto 6). En 2 S la coordenada de la partícula es 2.5 m. Por tanto, en este intervalo el cambio de posici6n es
Ax = x B - x A = 2.5 m - 1 m = 1 .5 m
y la velocidad media es (ver ec. (3.12))
Intervalo de 2 S (At = 2 S). A partir del instante 1 S, le corresponde el instante final 3 S (punto C). De la gráfi- ca se ve que en 3 S la coordenada de la partícula es "2 m. En consecuencia, en este intervalo el cambio de posición es
AX = x C - X A -2 m - 1 m = - 3 m
y la velocidad media es
- Ax - - 3 m v = __ At - - 2 s = -1.5 mis
Intervalo de 4 S (At = 4 S). Tomando como instante inicial 1 S, el instante final es 5 S (punto D). De la gráfi- ca se ve que en S S la coordenada es 0.5 m. Por tanto, en este intervalo el cambio de posición es
También se puede obtener el valor de la velocidad media si se da x(t) en forma gráfica. Ax = x D - x A = 0.5 m - 1 m = -0.5 m
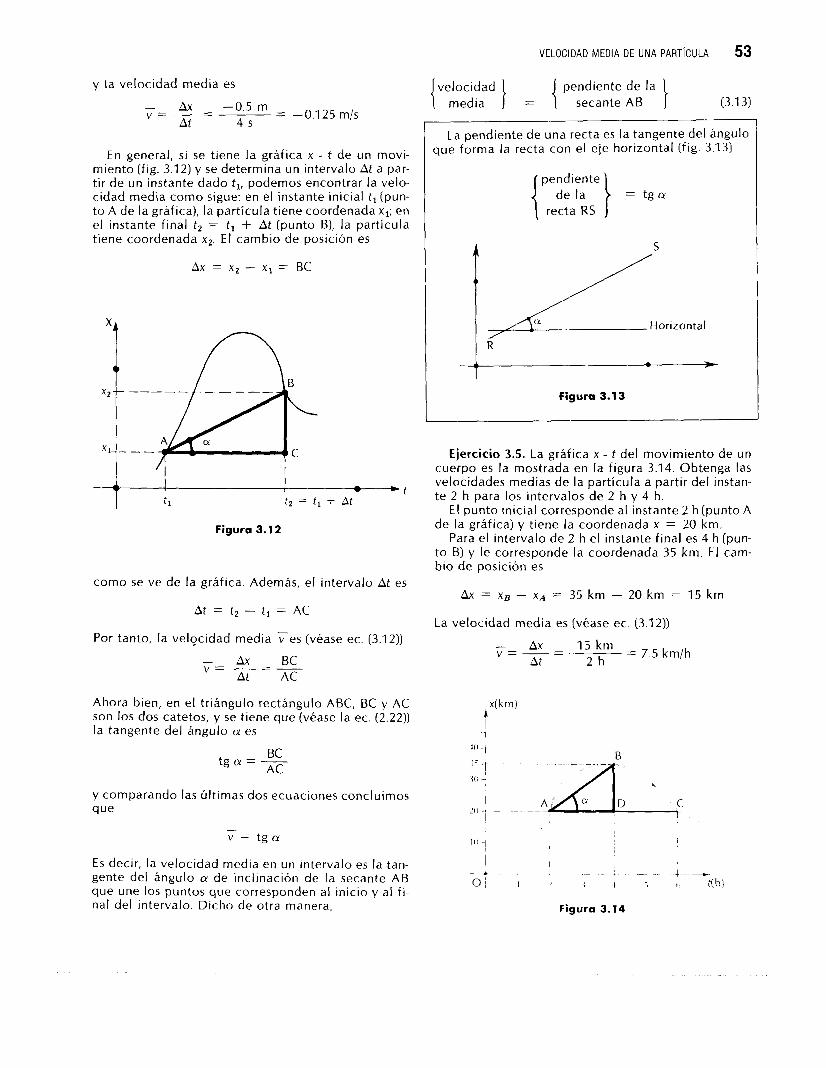
VELOCIDAD MEDIA DE UNA PARTíCULA 53
y la velocidad media es
- Ax - -0.5 m v = - - At 4 s = -0.125 m/s
En general, s i se tiene la gráfica x - t de un movi- miento (fig. 3.12) y se determina un intervalo At a par- tir de un instante dado t,, podemos encontrar la velo- cidad media como sigue: en el instante inicial t l (pun- t o A de la gráfica), la partícula tiene coordenada x , ; en el instante final t2 = t , + At (punto B), la partícula tiene coordenada x2. E l cambio de posición es
AX = X * - x1 BC
' I I
Figura 3.12
velocidad pendiente de la media = secante AB
La pendiente de una recta es la tangente del ángulo que forma la recta con el eje horizontal (fig. 3.13)
pendiente
recta RS de la = tgcy
1 * Figura 3.13
Ejercicio 3.5. La gráfica x - t del movimiento de un cuerpo es la mostrada en la figura 3.14. Obtenga las velocidades medias de la partícula a partir del instan- te 2 h para los intervalos de 2 h y 4 h.
E l punto inicial corresponde al instante 2 h (punto A de la gráfica) y tiene la coordenada x = 20 km.
Para el intervalo de 2 h el instante final es 4 h (pun- to 6) y le corresponde la coordenada 35 km. E l cam- bio de posición es
como se ve de la gráfica. Además, el intervalo At es
At t 2 - t l = AC
Por tanto, la velocidad media r e s (véase ec. (3.12))
Ahora bien, en el triángulo rectángulo ABC, BC y AC son los dos catetos, y se tiene que (véase la ec. (2.22)) la tangente del ángulo cy es
BC tgcy=- AC
y comparando las últimas dos ecuaciones concluimos que
- v = tgcy
E s decir, la velocidad media en un intervalo es la tan- gente del ángulo cy de inclinación de la secante AB que une los puntos que corresponden al inicio y al fi- nal del intervalo. Dicho de otra manera,
La velocidad media es (véase ec. (3.12))
- 15 km v = "
At 2 h = 7.5 km/h
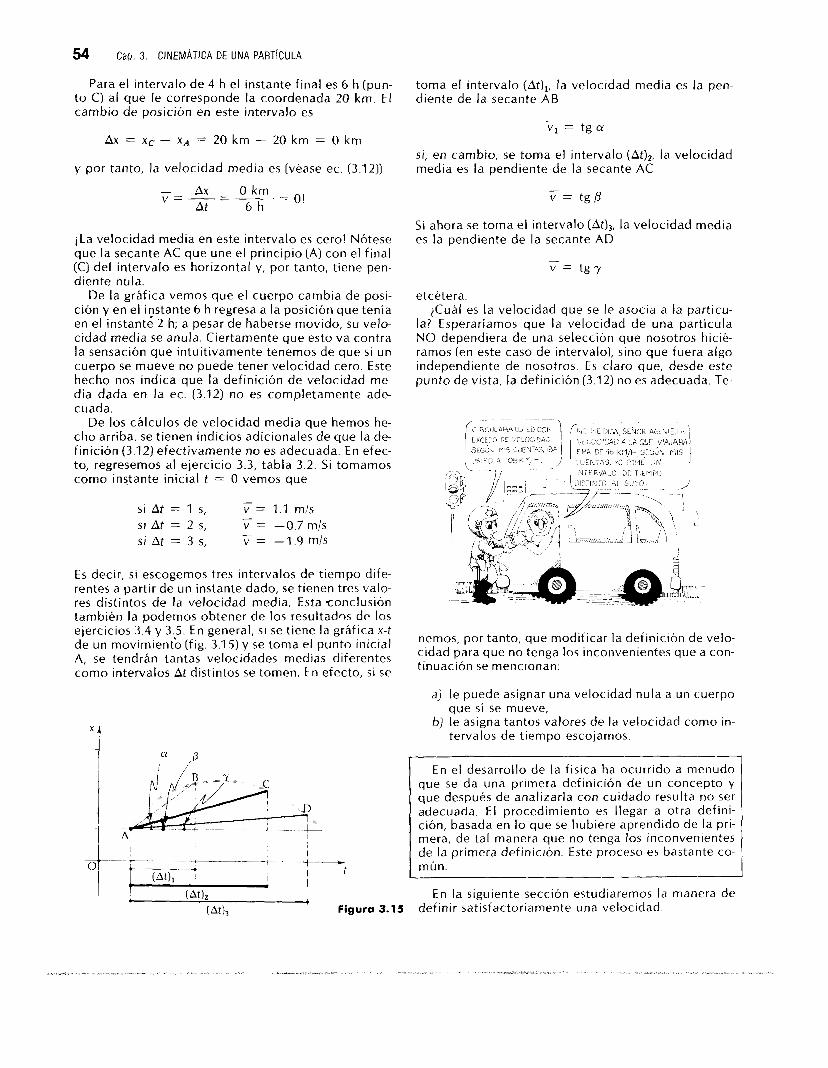
54 Cap. 3. CINEMÁTICA DE UNA PARTíCULA
Para el intervalo de 4 h el instante final es 6 h (pun- t o C) al que le corresponde la coordenada 20 km. E l cambio de posición en este intervalo es
Ax = x c - X A = 20 k m - 20 k m = O k m
y por tanto, la velocidad media es [véase ec. (3.12))
iLa velocidad media en este intervalo es cero! Nótese que la secante AC que une el principio (A) con el final (C) del intervalo es horizontal y, por tanto, tiene pen- diente nula.
De la gráfica vemos que el cuerpo cambia de posi- ción y en el ¡?stante 6 h regresa a la posición que tenía en el instante 2 h; a pesar de haberse movido, su velo- cidad media se anula. Ciertamente que esto va contra la sensación que intuitivamente tenemos de que s i un cuerpo se mueve no puede tener velocidad cero. Este hecho nos indica que la definición de velocidad me- dia dada en la ec. (3.12) no es completamente ade- cuada.
De los cálculos de velocidad media que hemos he- cho arriba, se tienen indicios adicionales de que la d e finición (3.12) efectivamente no es adecuada. En efec- to, regresemos al ejercicio 3.3, tabla 3 . 2 . Si tomamos como instante inicial t = O vemos que
si At = 1 S , v = 1 .I mls s i At = 2 S, v = -0.7 mis si At 3 S, v = -I 9 mls
- - -
E s decir, s i escogemos tres intervalos de tiempo dife- rentes a partir de un instante dado, se tienen tres valo- res distintos de la velocidad media. Esta conclusión también la podemos obtener de los resul tadw de los ejercicios 3.4 y 3,5. En general, s i se tiene la gráfica x-t de un movimiento (f ig. 3.15) y se toma el punto inicial A, se tendrán tantas velocidades medias diferentes como intervalos At distintos se tomen. En efecto, s i se
'f " P
toma el intervalo (AtIl, la velocidad media es la pen- diente de la secante A B
- V I = tg cy
si, en cambio, se toma el intervalo (At),, la velocidad media es la pendiente de la secante AC
si ahora se toma el intervalo (At),, la velocidad media es la pendiente de la secante AD
- v = t g y
etcétera. iCuál es la velocidad que se le asocia a la partícu-
la? Esperaríamos que la velocidad de una partícula NO dependiera de una selección que nosotros hicié- ramos (en este caso de intervalo), sino que fuera algo independiente de nosotros. E s claro que, desde este punto de vista, la definición (3.12) no es adecuada. Te-
nemos, por tanto, que modificar la definición de velo- cidad para que no tenga los inconvenientes que a con- tinuación se mencionan:
a) le puede asignar una velocidad nula a un cuerpo
b) le asigna tantos valores de la velocidad como in- que sí se mueve,
tervalos de tiempo escojamos.
En el desarrollo de la física ha ocurrido a menudo que se da una primera definición de un concepto y que después de analizarla con cuidado resulta no ser adecuada. E l procedimiento es llegar a otra defini- ción, basada en lo que se hubiere aprendido de la pri- mera, de tal manera que no tenga los inconvenientes de la primera definición. Este proceso es bastante co- mún.
En la siguiente sección estudiaremos la manera de
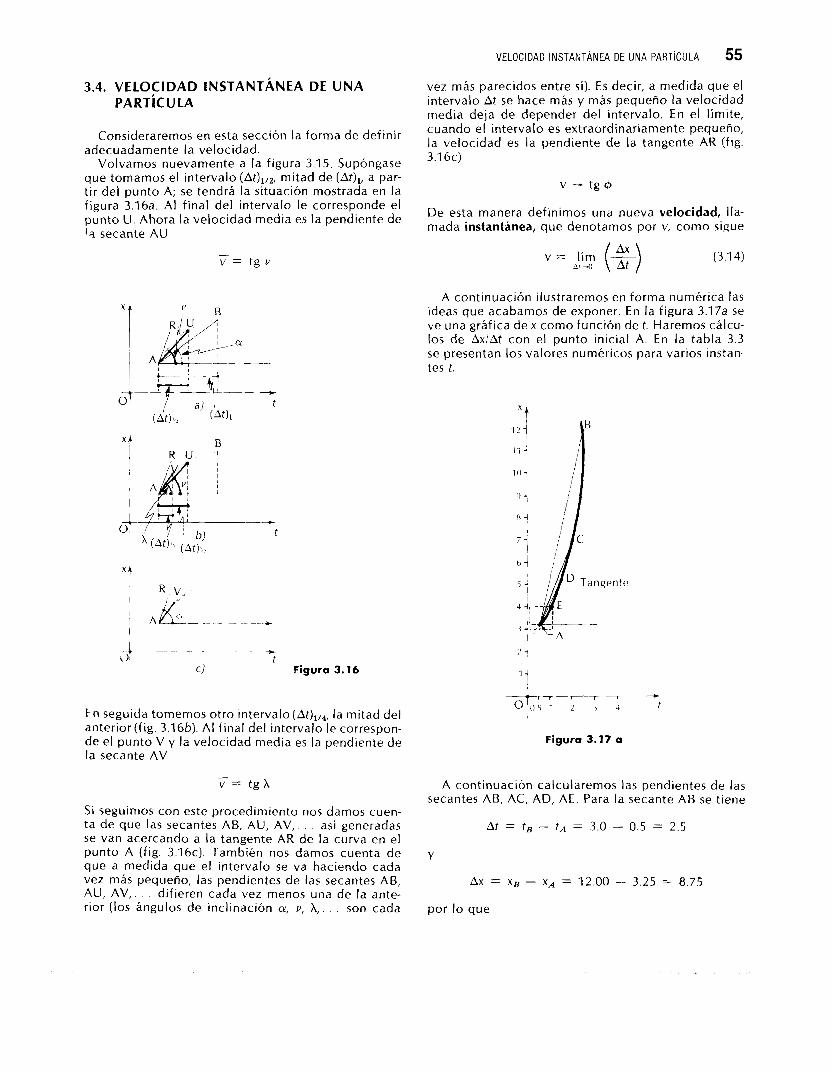
VELOCIDAD INSTANTANEA DE UNA PARTiCULA 55
3.4. VELOCIDAD INSTANTÁNEA DE UNA PARTiCU LA
Consideraremos en esta sección la forma de definir adecuadamente la velocidad.
Volvamos nuevamente a la figura 3.15. Supóngase que tomamos el intervalo mitad de (At),, a par- t ir del punto A; se tendrá la situación mostrada en la figura 3.16a. AI final del intervalo le corresponde el punto U. Ahora la velocidad media es la pendiente de la secante AU
- v = t g v
x t i ' B
O t
vez más parecidos entre sí). E s decir, a medida que el intervalo At se hace más y más pequeño la velocidad media deja de depender del intervalo. En el límite, cuando el intervalo es extraordinariamente pequeño, la velocidad es la pendiente de la tangente AR (fig. 3.1 6c)
De esta manera definimos una nueva velocidad, Ila- mada instantánea, que denotamos por v, como sigue
v = lím - A t 4 ( 2 ) (3.1 4)
A continuación ilustraremos en forma numérica las ideas que acabamos de exponer. En la figura 3.17a se ve una gráfica de x como función de t . Haremos cálcu- los de &/At con el punto inicial A. En la tabla 3.3 se presentan los valores numéricos para varios instan- tes t.
En seguida tomemos otro intervalo (At)l,4, la mitad del anterior (fig. 3.16b). AI final del intervalo le correspon- de el punto V y la velocidad media es la pendiente de la secante AV
Figura 3.17 o
- v = tgX A continuación calcularemos las pendientes de las
secantes AB, AC, AD, AE. Para la secante AB se tiene Si seguimos con este procedimiento nos damos cuen- ta de que las secantes AB, AU, AV,. . así generadas At = t B - f A = 3.0 - 0.5 = 2.5 se van acercando a la tangente AR de la curva en el punto A (f ig. 3.16~). También nos damos cuenta de y que a medida que el intervalo se va haciendo cada vez más pequeño, las pendientes de las secantes AB, AX XB - X A = 12.00 - 3.25 = 8.75 AU, AV,. . . difieren cada vez menos una de la ante- rior (los ángulos de inclinación CY, v, X,. . son cada por lo que
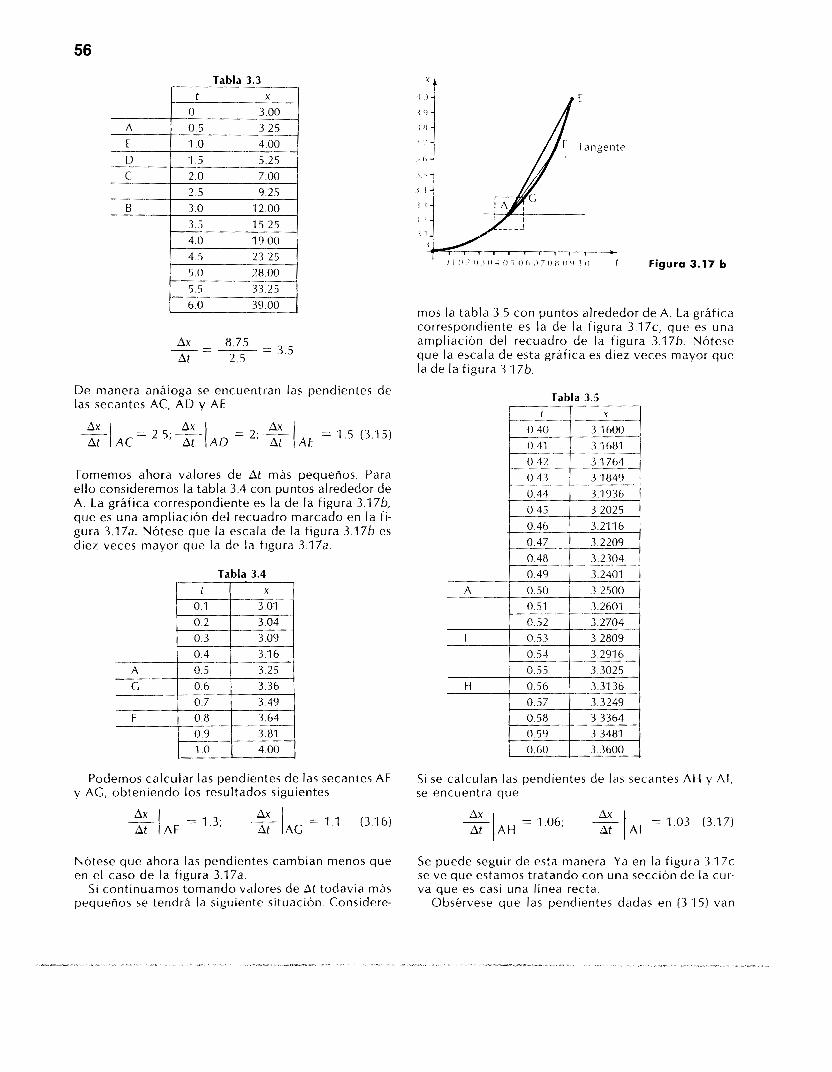
56
O 3.00 A 0.5 3.25 E 1 .o 4.00 D 1.5 5.25 c 2.0 7 .O0
2.5 9.25 B 3.0 12.00
3.5 1 5 25 4.0 19.00 4 5 23.25
"" Ax - 8.75 - 3.5 at 2.5
De manera análoga se encuentran las pendientes de las secantes AC, AD y AE
= 1.3; 1 = 1 .I (3.16) At AC
mos la tabla 3.5 con puntos alrededor de A. La gráfica correspondiente es la de la figura 3.17c, que es una ampliación del recuadro de la figura 3.17b. Nótese que la escala de esta gráfica es diez veces mayor que la de la figura 3.17b.
Tabla 3.5
3.2116 3.2209 3.2304
Si se calculan las pendientes de las secantes A H y A l , se encuentra que
Nhtese aue ahora las pendientes cambian menos que . " - ~ en el caio de la figura 3.17a.
si continuamos tomando valores de At todavía más pequeños se tendrá la siguiente situación. Considere-
Se puede seguir de esta manera. Ya en l a f i gu ra 3 .17~ se ve que estamos tratando con una sección de la cur- va que es casi una línea recta.
Obsérvese que las pendientes dadas en (3.15) van
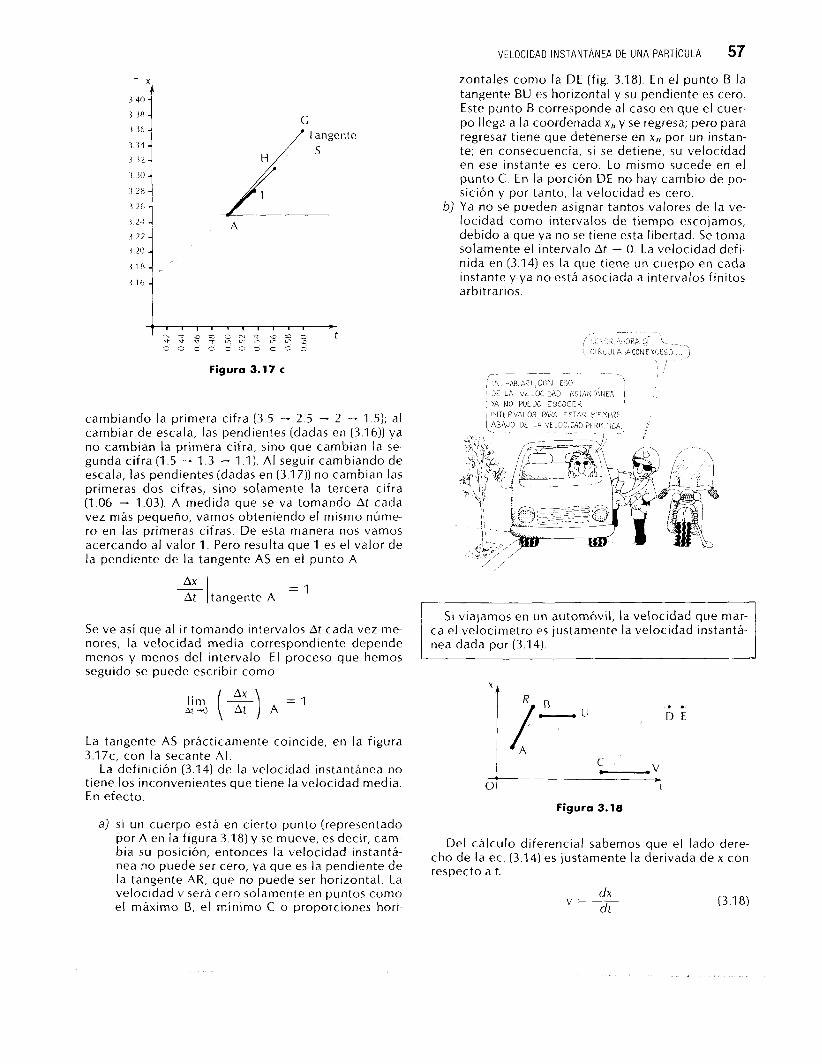
VELOCIDAD INSTANTANEA DE UNA PARTiCULA 57 zontales como la DE (fig. 3.18). En el punto B la tangente BU es horizontal y su pendiente es cero. Este punto B corresponde al caso en que el cuer- po llega a la coordenada xB y se regresa; pero para regresar tiene que detenerse en xy por un instan- te; en consecuencia, si se detiene, su velocidad en ese instante es cero. Lo mismo sucede en el punto C. En la porción DE no hay cambio de po- sición y por tanto, la velocidad es cero.
bj Ya no se pueden asignar tantos valores de la ve- locidad como intervalos de tiempo escojamos, debido a que ya no se tiene esta libertad. Se toma solamente el intervalo At - O. La velocidad defi- nida en (3.14) es la que tiene un cuerpo en cada instante y ya no está asociada a intervalos finitos arbitrarios.
- x
i 40 - 3 1 8 -
i 1h - 3 3 4 -
3 12
1 10 - i LH - 3 Zh - 1 24 - 1 2 2 - 1 L O - 3 18
H 2:ngente
1 1 1 1 1 1 1 1 t r y 7 3 3 3 = " 1 T o T S t f T ~ * L ^ L ^ r r L ^ L T C """"" """""
Figura 3.17 c
cambiando la primera cifra (3.5 - 2.5 - 2 - 1.5); al cambiar de escala, las pendientes (dadas en (3.16)) ya no cambian la primera cifra, sino que cambian la se- gunda cifra (1.5 - 1.3 - 1 .I]. A I seguir cambiando de escala, las pendientes (dadas en (3.17)) no cambian las primeras dos cifras, sino solamente la tercera cifra (1 .O6 - 1.03). A medida que se va tomando At cada vez más pequeño, vamos obteniendo el mismo núme- ro en las primeras cifras. De esta manera nos vamos acercando al valor 1. Pero resulta que 1 es el valor de la pendiente de la tangente AS en el punto A
\ /' -\
=I I I
1 S i viajamos en un automóvil, la velocidad que mar- Se ve así que al i r tomando intervalos At cada vez me- nores, la velocidad media correspondiente depende
ca el velocímetro es justamente la velocidad instantá-
seguido se puede escribir como menos y menos del intervalo. E l proceso que hemos
nea dada por (3.14).
La tangente AS prácticamente coincide, en la figura 3.17c, con la secante AI.
La definición (3.14) de la velocidad instantánea no tiene los inconvenientes que tiene la velocidad media. En efecto,
a) s i un cuerpo está en cierto punto (representado por A en la figura 3.18) y se mueve, es decir, cam- bia su posición, entonces la velocidad instantá- nea no puede ser cero, ya que es la pendiente de la tangente AR, que no puede ser horizontal. La velocidad v será cern solamente en puntos como el máximo B. el mínimo C o proporciones hori-
C -v Ot----------"7
Figura 3.18
Del cálculo diferencial sabemos que el lado dere- cho de la ec. (3.14) es justamente la derivada de x con respecto a t.
d x v = - dt (3.1 8)

58 Cap. 3. CINEMÁTICA DE UNA PART~CULA
d dt dt v(t) = A -t3 + B d t Recuérdese la definición de la derivada de la fun-
ción f(y) con respecto a y
y usando (3.22)
v(t) = 3At2 + B
Sustituyendo valores
m ~ ( 3 S) = 3 X 5.2 -j- X (3 S)' -2.1 - m S S
(3.23) Dada la trayectoria de la partícula? = x(t) se puede
encontrar la velocidad instantánea usando la ec. (3.18) o calculando la pendiente de la tangente en la gráfica x - t correspondiente.
Ejercicio 3.6. Si un cuerpo sigue la trayectoria
x(t) = At3 + Bt (3.19)
= 3 X 5.2 X 9 7 m X S'"2.1 - m S S
= 140.4- m -2.1 - m S S con A = 5.2 mis3 y B = -2.1 mis, obténgase su posi-
ción y su velocidad instantánea en el instante t = 3 s. Primero calcularemos la posición en t = 3 s. Susti-
tuyendo este valor y los valores de A y B en (3.19) = 138.3 - m S
x(3 S) = 5.2 -7J x (3 s)3 - 2.1 - x (3 S) m m S S Ejercicio 3.7. Calcule la posición y la velocidad en
el instante 4 S de una partícula que se mueve según
x(t) = x0 cos wt (3.24) 2.1 x 3- x S m S
Recuérdese que l o s símbolos de se mane- ferida al sistema de coordenadas mostrado en la figu- con x0 = 8.2 m y w = 3.1 rad/s. Esta expresión está re-
ra 3.1 9. jan como símbolos algebraicos (véase capítulo 1).
La posición en el instante t = 4 S es x(3 S) = 140.4 m - 6.3 m = 134.1 m
x(4 S) = 8.2 m cos (3.1 - rad x 4 S) S Para calcular la velocidad instantánea tomamos la
derivada de (3.19) con respecto a t (véase ec. (3.18)) = 8.2 m cos (12.4 rad) = 8.2 m X 0.9862 = 8.09 m
Del cálculo diferencial se tienen los siguientes re- sultados:
a) la derivada de una suma es la suma de las deri- vadas
Para obtener la velocidad derivamos con respecto a t la expresión (3.24)
I La derivada de la función coseno es I (3.20)
- cos f(y) = "sen f(y) d (3.25) I dY dY 1 b) s i A es una constante I
d d dt t
v(t) = - x(t) = -xxOsen wt r ( w f ) (3.21)
(3.22)
- - -xOw sen ut (3.26) I c1 Para este cálculo hemos usado los resultados (3.21) y
(3.22). Sustituyendo valores en (3.26) obtenemos
v(4 S) = -8.2 m X 3.1 ~ rad sen (3.1 __ rad x 4 S) S S
= -25.42 - x sen (12.4 rad) m S
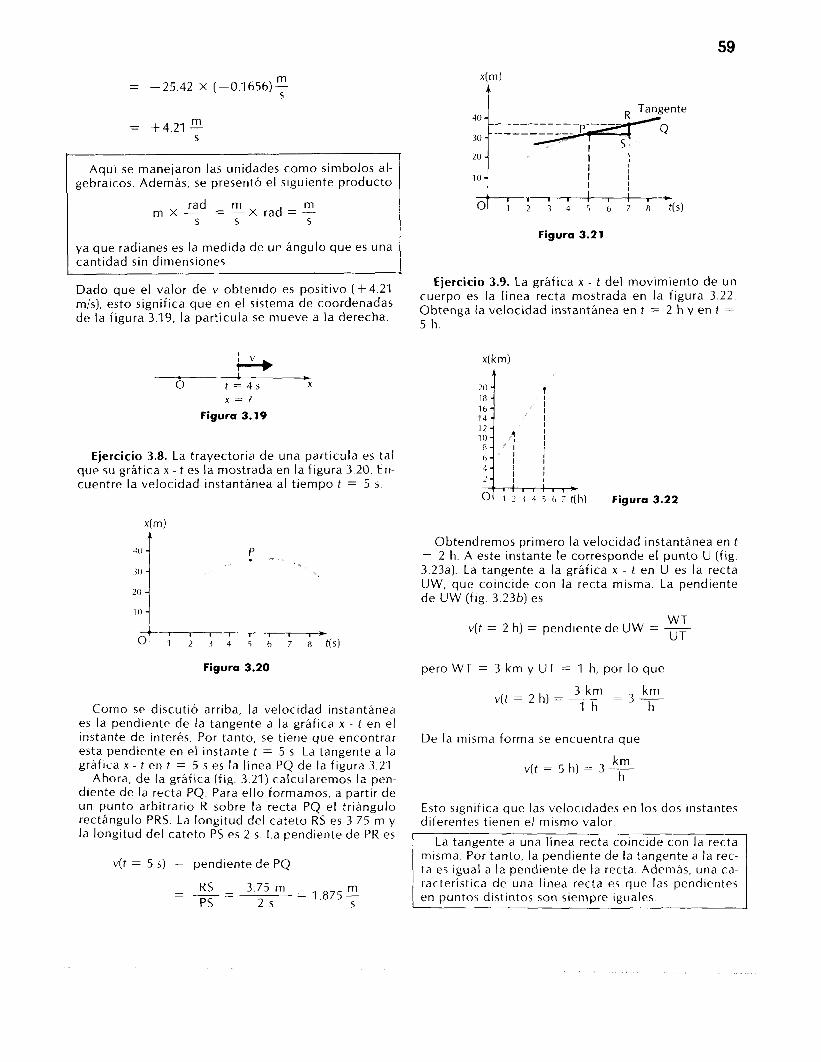
59
= "25.42 X (-0.1656)- m S
= +4.21 - m S
Aqui se manejaron las unidades como símbolos al- gebraicos. Además, se presentó el siguiente producto
ya que radianes es la medida de un ángulo que es una cantidad sin dimensiones.
1 ° i
I I I I
I
Figura 3.21
I I
Dado que el de Obtenido es positivo (+4'21 cuerpo es la línea recta mostrada en la figura 3.22. Ejercicio 3.9. La gráfica x - t del movimiento de un
Obtenga la velocidad instantánea en t = 2 h y en t = 5 h.
mis), esto significa que en el sistema de coordenadas de la figura 3.19, la partícula se mueve a la derecha.
* O t = 4 s X
x = ?
Figura 3.19
Ejercicio 3.8. La trayectoria de una partícula es tal que su gráfica x - t es la mostrada en la figura 3.20. En- cuentre la velocidad instantánea al tiempo t = 5 s.
*'I 1 1 o
Obtendremos primero la velocidad instantánea en t = 2 h. A este instante le corresponde el punto U (fig. 3.23a). La tangente a la gráfica x - t en U es la recta UW, que coincide con la recta misma. La pendiente de UW (f ig. 3.23b) es
v(t = 2 h) = pendiente de UW = - WT UT
Figura 3.20 pero WT = 3 km y UT = 1 h, por lo que
3 k m - k m ~ ( t 2 h) = ~ - 3- Como se discutió arriba, la velocidad instantánea I h h
es la pendiente de la tangente a la gráfica x - t en el instante de interés. Por tanto, se tiene que encontrar De la misma forma se encuentra que esta pendiente en el instante t = 5 s. La tangente a la gráflca x - t en t = 5 S es la línea PQ de la figura 3.21 km
Ahora, de la gráfica (fig. 3.21) calcularemos la pen- v(t = 5 h) = 3 __
diente de la recta PQ. Para ello formamos, a partir de un punto arbitrario R sobre la recta PQ el triángulo Esto significa que las velocidades en los dos instantes rectángulo PRS. La longitud del cateto R S es 3.75 m y diferentes tienen el mismo valor la longitud del cateto PS es 2 s. La rendiente de PR es I La tangente a una línea recta coincide con la recta 1
h
v(t = 5 S) = pendiente de PQ misma. Por tanto, la pendiente de la tangente a la rec- ta es igual a la pendiente de la recta. Además, una ca- racterística de una línea recta es que las pendientes en puntos distintos son siempre iguales.

60
Figura 3.23 bl
En general, s i la gráfica x - t de un movimiento es una línea recta, la velocidad instantánea en cualquier instante tiene siempre el mismo valor. A este tipo de movimiento se le l lama uniforme. La velocidad instan- tánea en el movimiento uniforme es la pendiente de la recta x - t. En un movimiento uniforme v = V.
Ejercicio 3.10. La gráfica x - t del movimiento de una partícula es la línea recta de la figura 3.24. iCuá1 es la velocidad de la partícula?
X
P Q
1
01 b
t
Figura 3.24
En primer lugar, por ser la gráfica x - t una línea rec- ta, su velocidad instantánea en cualquier instante es la pendiente de la recta PQ. Pero esta recta es hori- zontal, por lo que su pendiente es cero y
v = o
es decir, el cuerpo no se mueve
3.5. ACELERACIóN DE U N A P A R T í C U L A
En un movimiento arbitrario, la velocidad v de una partícula cambia al transcurrir el tiempo. Por tanto, se puede definir el cambio de la velocidad Av en el inter- valo de tiempo At (véase ec. (3.5))
Av = (velocidad final) - (velocidad inicial)
AI igual que en el caso de la posición se define la ace- leración media T c o m o
Las dimensiones de la aceleración son
(3.27)
pero [t] = T y de la ec. (1.421, [VI = L/T por lo que
(véase ec. (1.44)).
des de la aceleración son mis2. En el Sistema Internacional de unidades las unida-
Ejercicio 3.11. Un cuerpo tiene una velocidad de 4.5 mis en el instante inicial; posteriormente, en el instan- te 2 S, tiene una velocidad de 6.7 mis. 2Qué acelera- ción media experimenta e l cuerpo?
Se tiene que
en t l = O, v1 = 4.5 mis y en tz = 2 S, v2 = 6.7 mis
E l cambio de velocidad es (véase ec. (3.5))
Av = (velocidad final) - (velocidad inicial) - - v2 - "1
m m m = 6.7 - -4.5- = 2.2- S S S
E l intervalo de tiempo At es (vPase ec. (3.3))
A t = t 2 - t 1 = 2 s - - 0 s = 2 s

61
Sustituyendo estos resultados en la ec. (3.27) - 2.2 mis - 2.2 mis a = 2 s 2 s
= 1.1 7 m
Aquí se usó la ec. (1 .I 5). En este caso la aceleración media es positiva; en
consecuencia, en el sistema de coordenadas de la f i - gura 3.25, la aceleración tiene sentido hacia la de- recha.
O t, = o t 2 = 2 s x Figura 3.25
Ejercicio 3.12. Un cuerpo t iene una velocidad ini- cial de 8.5 mis; en el instante 3 S tiene una velocidad de 4.2 mis. iQué aceleración media se ejerce sobre el cuerpo?
Se tiene que
en tl = O, v1 = 8.5 mis y en t2 = 3 S , v2 = 4.2 mis
E l cambio de velocidad es
m m = 4.2 - -8.5 - S S
= -4.3- m S
E l intervalo de tiempo es
A t = t 2 - t 1 = 3 ~ - 0 = 3 ~
Sustituyendo estos valores en la ec. (3.27) nos da
- -4.3 mis m a = S* 3 s = -1.43-
En este caso la aceleración media es negativa; por tanto, en el sistema de coordenadas de la figura 3.26 la aceleración tiene sentido hacia la izquierda.
En vista de que el intervalo At es siempre positivo, el signo que adquiere r e s el mismo que tiene Av. AI igual que en el caso de la velocidad media (pág. 51) se tiene, en el sistema de coordenadas de la figura 3.27 lo siguiente:
“1. a l ”
O t , = o t 2 = 3 s x w
Figura 3.26
s i a> O, el cambio de la velocidad ocurre hacia derecha (fig. 3.27a), si a< O, el cambio de la velocidad ocurre hacia izquierda (fig. 3.276), si X= O, no hay cambio de velocidad.
la
la
Ejercicio 3.13. Una partícula está inicialmente en reposo. Sobre ella actúa una aceleración de 3.2 m/seg2 hacia la derecha. iQué velocidad tendrá la partícula después de 0.5 S ?
Dado que la velocidad inicial de la partícula es ce- ro y que sobre ella actúa una aceleración, entonces la velocidad cambiará; cambiará del valor cero a un va- lor distinto de cero. E s decir, en un instante posterior la partícula tendrá una velocidad, o sea, se moverá.
Tomamos el eje X a lo largo de la línea en que se mueve el cuerpo; se escoge el sentido positivo del eje hacia la derecha (fig. 3.28). Como la aceleración actúa hacia la derecha, en este sistema de coordenadas tiene signo positivo
a = + 3.2 mis2
De la ec. (3.27) despejamos el cambio de la velo- ,cidad Av
Véase apéndice I I con N = a, v = Av y b = At. 1 Av = a A t (3.28)
Sustituyendo valores obtenemos
m S 2
AV = 3.2 - X 0.5 S
= 3.2 X 0.5 7 X S m S
m = 1.6-
S
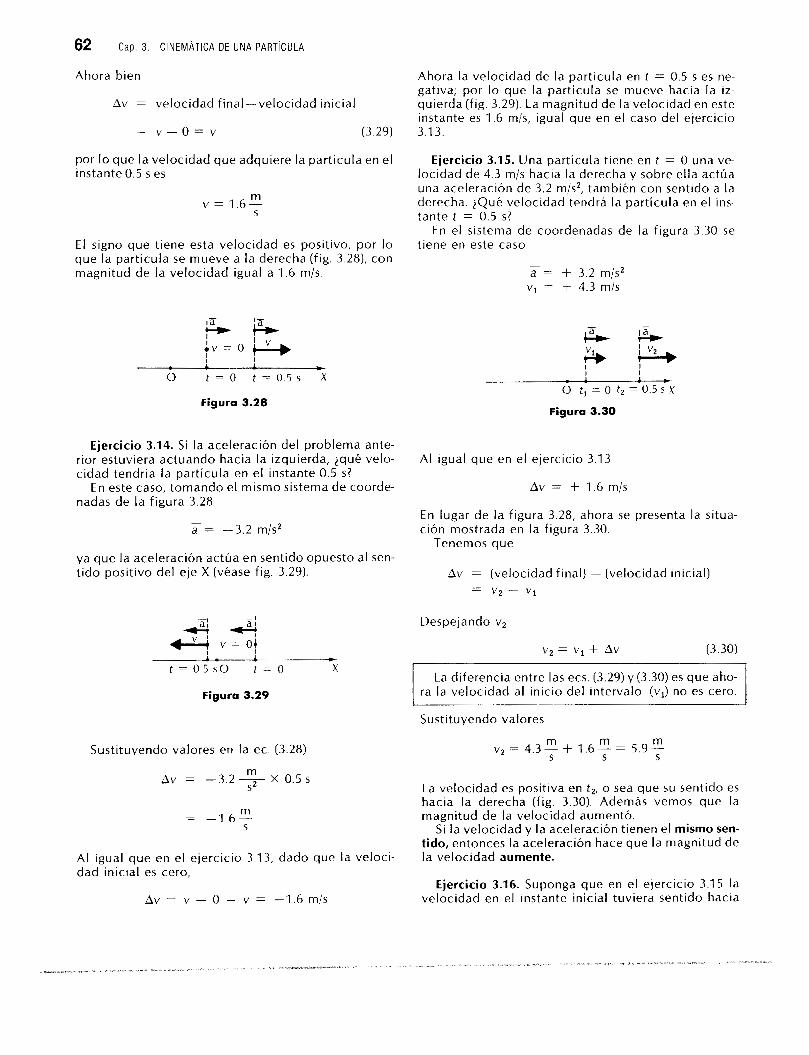
62 CaD. 3 . CINEMATICA DE UNA PART~CULA
Ahora bien
Av = velocidad f inal-velocidad inicial
= v " O = v (3.29)
por lo que la velocidad que adquiere la partícula en el instante 0.5 S es
v = 1.6- m S
EI signo que tiene esta velocidad es positivo, por lo que la partícula se mueve a la derecha (fig. 3.28), con magnitud de la velocidad igual a 1.6 mis.
I I I *
O t = O t = 0 . 5 s X
Figura 3.28
Ejercicio 3.14. Si la aceleración del problema ante- rior estuviera actuando hacia la izquierda, iqué velo- cidad tendría la partícula en el instante 0.5 s?
En este caso, tomando el mismo sistema de coorde- nadas de la figura 3.28
- a = -3.2 mis2
ya que la aceleración actúa en sentido opuesto al sen- tido positivo del eje X (véase fig. 3.29).
1 - 1 434 &+ v = 0 + I - I *
t = 0.5 S O t = 0 X
Figura 3.29
Sustituyendo valores en la ec. (3.28)
= -1.6- m S
AI igual que en el ejercicio 3.13, dado que la veloci- dad inicial es cero,
Av = v - O = v = -1.6 mis
Ahora la velocidad de la partícula en t = 0.5 S es ne- gativa; por lo que la partícula se mueve hacia la iz- quierda (fig. 3.29). La magnitud de la velocidad en este instante es 1.6 mis, igual que en el caso del ejercicio 3.1 3.
Ejercicio 3.15. Una partícula tiene en t = O una ve- locidad de 4.3 mis hacia la derecha y sobre ella actúa una aceleración de 3.2 m/s2, también con sentido a la derecha. iQué velocidad tendrá la partícula en el ins- tante t = 0.5 S ?
En el sistema de coordenadas de la figura 3.30 se tiene en este caso
- a = + 3.2 mis2
v1 = + 4.3 mis
Figura 3.30
Al igual que en el ejercicio 3.13
Av = + 1.6 mis
En lugar de la figura 3.28, ahora se presenta la situa- ción mostrada en la figura 3.30.
Tenemos que
Av = (velocidad final) - (velocidad inicial) - - v2 - v1
Despejando v2
v2 = v1 + Av (3.30) ~~~~
La diferencia entre las ecs. (3.29) y (3.30) es que aho- ra la velocidad al inicio del intervalo (vl) no es cero.
Sustituyendo valores
m m m ~2 4.3 - + 1.6 - = 5.9 -
S S S
La velocidad es positiva en t2, o sea que su sentido es hacia la derecha (fig. 3.30). Además vemos que la magnitud de la velocidad aumentó.
S i la velocidad y la aceleración tienen el mismo sen- tido, entonces la aceleración hace que la magnitud de la velocidad aumente.
Ejercicio 3.16. Suponga que en el ejercicio 3.15 la velocidad en el instante inicial tuviera sentido hacia
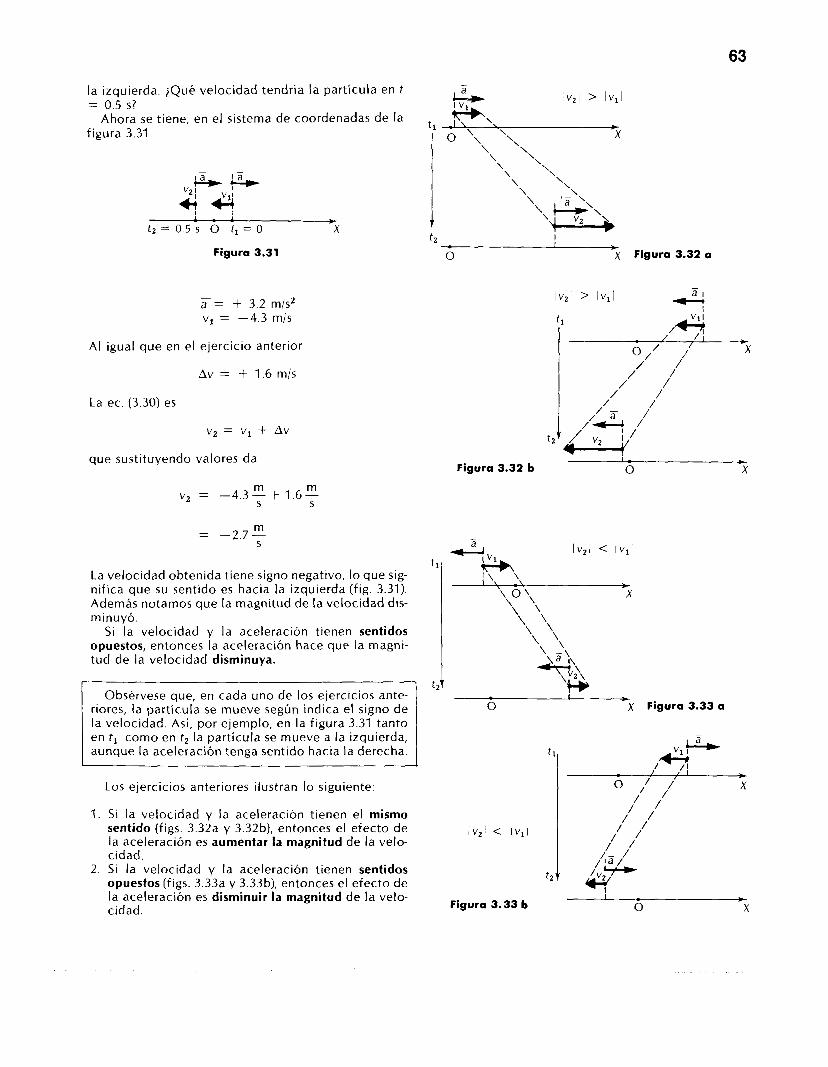
63
la izquierda. iQué velocidad tendría la partícula en t = 0.5 S? + figura 3.31
- l v * l > / V I 1
Ahora se tiene, en el sistema de coordenadas de la t l .e\,. I 0 '\ \ *
X \ '\\
I
t 2 = 0.5 S O t, = O x
Figura 3.31
- a = + 3.2 mis2 v1 = -4.3 rn ls
AI igual que en el ejercicio anterior
Av = + 1.6 mis
La ec. (3.30) es
que sustituyendo valores da
I
O -x Figura 3.32 a
Figura 3.32 b O X
m m ~2 = -4.3- + 1.6-
S S
La velocidad obtenida tiene signo negativo, lo que sig- nif ica que su sentido es hacia la izquierda (fig. 3.31). Además notamos que la magnitud de la velocidad dis- minuyó.
Si la velocidad y la aceleración tienen sentidos opuestos, entonces la aceleración hace que la magni- tud de la velocidad disminuya.
riores, la partícula se mueve según indica el signo de la velocidad. Así, por ejemplo, en la figura 3.31 tanto en t , como en t2 la partícula se mueve a la izquierda, aunque la aceleración tenga sentido hacia la derecha.
LOS ejercicios anteriores ilustran lo siguiente:
1 L
O x Figura 3.33 a
1. Si la velocidad y la aceleración tienen el mismo
cidad. la aceleración es aumentar la magnitud de la velo- // // sentido (figs. 3.32a y 3.32131, entonces el efecto de I V Z I < l V 1 l
/. ,/ 2. Si la velocidad y la aceleración tienen sentidos
opuestos (figs. 3.33a y 3.33133, entonces el efecto de la aceleración es disminuir la magnitud de la velo- Figura 3.33 I
cidad. O x
//I //I a //
t z t &?

64 Cap. 3. CINEMATICA DE UNA PART~CULA
La definición (3.27) de la aceleración medid tiene y usando la ec. (3.21) los mismos inconvenientes que la definición de velo- cidad media (véase sección 3.3). De la misma forrna
locidad, se define la aceleración instantánea a de la manera siguiente Ahora utilizamos la ec. (3 22)
d ~ ( t ) 3E -t4 - 4C - que se llega a una definición más apropiada de la ve- dt dt d t t 2 + 5 A d t
a = l im (S)= dt dv (1.31) vir) = 3E X 4t3 - 4C x 2 t + 5A x 1 5: -o = 12Et3 - 8Ct + 5A
No repetiremos el argumento pues se puede calcar Una vez que tenemos v(t) podemos calcular a(t), palabra por palabra, simplemente sustituyendo en la usando ¡a ec (3.31) discusión dada en las secciones 3.2 y 3.3 la paidbra posición por velocidad y la palabra velocidad por dce- a( t j = __ v(t) = __ (12Et3 - 8Ct + 5A) leraciór,.
mos
d dt dt
Si ahora sustituimos (3.18) en la ec. (3.31!, obtene- = 12E X 3 t 2 - 8 C X 1 + O
= 36Et2- 8C (3.34)
Aqui se usaron las ecs. (3.20) a (3.22) y el hecho de que d(5A)idt = O, por ser A una constante. Evaluaremos
d d dx - d2X dt d t dt dt2
a = - (3.3'1
Es decir, para encontrar la aceleración instantánea ahora (3.34) Para t = 3 s. SustituYendo 10s valores hay que derivar dos veces la posición x(t) con respecto al t iempo. a(3 S) = 36 X 6.1 __- X (3 S)* - 8 X 2 3 __
m m S4 5 2
En lo sucesivo se debe recordar que
o equivalentemente
s i la velocidad de un cuerpo CAMBIA aceleración
Como se vio en la sección anterior, s i uno conoce la trayectoria x = x(t) puede obtenerse la velocidad v(t). A su vez, s i uno conoce v(t) se puede obtener, con ayu- da de la ec. (3.31), la aceleración a(t). Se concluye que la trayectoria x(t) determina tanto v(t) como a(t1
Ejercicio 3.17. Una partícula se mueve de acuerdo
x(t) = 3Et4 - 4Ct2 + 5At C3.33) con
con E = 6.1 mis4, C = 2.3 mis2 y A = 4 mis. Calciilese la aceleración instantánea en t = 3 5 .
Para calcular a(f) necesitamos conocer primero v(tj. Usando la ec. (3.18) obtenemos
d d dt dt
L i t ) = ---x(t = "(3Et4 4Ct2 -1- 5,At)
Con ayuda de (3.20)
d d "(3Et4) - --[4CrZj + __ dt d t d t
(sAt j
Nótese que para obtener a(t), ec. (3.34), se llevaron a cabo dos derivadas con respecto ai tiempo.
Ejercicio 3.18. En la figura 3.34 se muestra la gráfica x - t del movimiento de una partícula. Obtener las grá- ficas v - t y a - t correspondientes.
En la sección 3.4 se estudió que l a velocidad instan- tánea es la pendiente de la gráfica x - t. Se encontrará esta pendiente punto a punto. Así, en el punto L (fig. 3.35a) la tangente es la línea LT. Se calcula la pendien- te de LT, como se hizo en el ejercicio 3.8, obteniéndo- se el valor 0.749 mis. Este valor es el de l a velocidad en ese instante y corresponde al punto X de la figura 3 .356 D e l a misma forma se encuentran l ~ a s pendien-
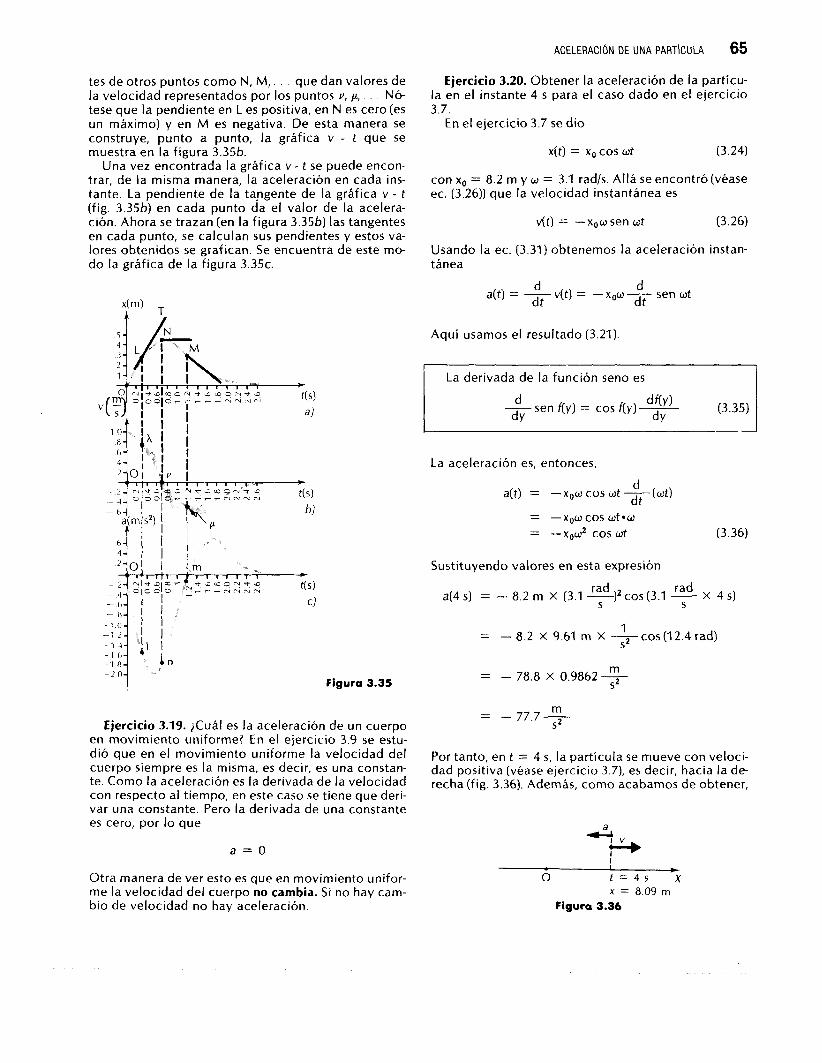
ACELERACldN DE UNA PARTiCULA 65
tes de otros puntos como N, M,. . . que dan valores de la velocidad representados por los puntos u, F , . . NÓ- tese que la pendiente en L es positiva, en N es cero (es un máximo) y en M es negativa. De esta manera se construye, punto a punto, la gráfica v - t que se muestra en la figura 3.3%.
Una vez encontrada la gráfica v - t se puede encon- trar, de la misma manera, la aceleración en cada ins- tante. La pendiente de la tangente de la gráfica v - t (fig. 3.356) en cada punto da el valor de la acelera- ción. Ahora se trazan (en la figura 3.356) las tangentes en cada punto, se calculan sus pendientes y estos va- lores obtenidos se grafican. Se encuentra de este mo- do la gráfica de la f igura 3.35~.
Figura 3.35
Ejercicio 3.19. iCuál es la aceleración de un cuerpo en movimiento uniforme? En el ejercicio 3.9 se estu- dió que en el movimiento uniforme la velocidad del cuerpo siempre es la misma, es decir, es una constan- te. Como la aceleración es la derivada de la velocidad con respecto al tiempo, en este caso se tiene que deri- var una constante. Pero la derivada de una constante es cero, por lo que
a = O
Ejercicio 3.20. Obtener la aceleración de la partícu- la en el instante 4 S para el caso dado en el ejercicio 3.7.
En el ejercicio 3.7 se dio
x(t) = x0 cos wt (3.24)
con x. = 8.2 m y w = 3.1 rad/s. Al lá se encontró (véase ec. (3.26)) que la velocidad instantánea es
v(t) = -xoo sen ot (3.26)
Usando la ec. (3.31) obtenemos la aceleracion instan- tánea
d d a(t) = - dt v(t) = - xow- sen ot dt
Aquí usamos el resultado (3.21).
I La derivada de la función seno es
d -sen fly) = cos f ly ) " - - - dy dY
(3.35) WY)
La aceleración es, entonces,
d a(t) = -xOo cos wt ---(or)
- - x o o cos wt*o
- " X o W ~ cos wt (3.36)
d t - -
Sustituyendo valores en esta expresión
a(4 S) = - 8.2 m X (3.1 -)2 cos (3.1 - rad rad x 4 S) S S
= - 8.2 X 9.61 m X - cos (I 2.4 rad) S2
= - 78.8 X 0.9862 - m S2
= - 77.7- m S 2
Por tanto, en t = 4 S, la partícula se mueve con veloci- dad positiva (véase ejercicio 3.7). es decir, hacia la de- recha (fig. 3.36). AdemAs, como acabamos de obtener,
4" i
Otra manera de ver esto es que en movimiento unifor- me la velocidad del cuerpo no cambia. Si no hay cam- bio de velocidad no hay aceleración.
I - O t = 4 s ,y
X = 8.09 m Figura 3.36

66 Cap. 3. CINEMATICA DE UNA PART~CULA
la aceleración en este instante es negativa; es decir, hacia la izquierda. En consecuencia, la aceleración es opuesta a la velocidad. Esto significa que la velocidad va disminuyendo en su magnitud.
Ejercicio 3.21. Encuentre la aceleración de la par-
En el ejercicio 3.6 se encontró que la velocidad ins- tícula en t = 3 s para el caso del ejercicio 3.6.
tantánea es (véase ec. (3.23))
v(t) = 3At2 i- B (3.23)
Usando la ec. (3.31) encontramos la aceleración
a( t ) = - (3At2 + B) dt
d d t dt
- - -(3At2) + __ d B
d dt
= 3A-t2
= 3A X 2t
= 6At
Aquí se usaron las ecs. (3.20) a (3.22). Por tanto,
a(3 S) = 6A X 3 S
= 5.2- x 3 s m S 3
= 15.6- m S 2
Aquí se tuvo
m 5 - m S 3 53 S2
- X s = m X - - -
En el ejercicio 3.6 se obtuvo que en t = 3 S la velo- cidad es positiva ( + 138.3 m/s), es decir, hacia la dere- cha en el sistema de coordenadas mostrado en la figu- ra 3.37. E l resultado que acabamos de obtener nos in- dica que en este mismo instante, la aceleración es po- sitiva, es decir, también hacia la derecha (fig. 3.37). En consecuencia, la aceleración y la velocidad tienen el mismo sentido. Esto significa que la velocidad va aumentando en su magnitud.
I + o t = 3 s x X = 134.1 m
Figura 3.37
Ejercicio 3.22. La trayectoria de un cuerpo está da- da por
x(t) = x0 + v,t + - yt2 + - At3 (3.37) ( 2 ('6) con x. = - 7.98 m, v,, = - 58.36 mls, y = 31.34 m/s2
Y X = - 6 m/s3.
a) Obtener la velocidad instantánea v(t). b) Obtener la aceleración instantánea a(t). c) 2En qué instante v = O? dl 2En qué instante a = O? e) Craficar x, v y a como funciones de t. f) Discutir el movimiento del cuerpo.
a) Para calcular la velocidad instantánea sustituimos la expresión (3.37) en la ec. (3.18)
v(t) = "(t) d t d = "x0 d t d + v, t + (+t2 + ( 3 t 3 )
Ahora usamos sucesivamente las ecs. (3.20) a (3.22)
d d d l d l d t dt dt 2 dt 6 V(f) = - x g + - (vat) + - (- yt2) + - ("At31
= v,+ -y 1 x 2 t+ -Xx3 t2 1 2 6
v(t) = v,+yt+ -At2 1 2
(3.38)
Aquí se usó dxddt = O ya que x. es constante. b) Para obtener la aceleración instantánea susti- tuimos el resultado (3.38) en la ec. (3.31)
d a(t) = - v(t) = -(Vo + yt + "Xt2) 1
dt dt 2
y usamos nuevamente las ecs. (3.20) a (3.22)
d d d i dt dt dt 2 a(t) = - VD + - (yt) + "-( "XtZ)
(3.39)
c) Sea 7 el instante en que v = 0; o sea, ~ ( 7 ) = O . Usando la ec. (3.38) se tiene que
1 2
v(7) = vg + y7 + - A S = o (3.40)
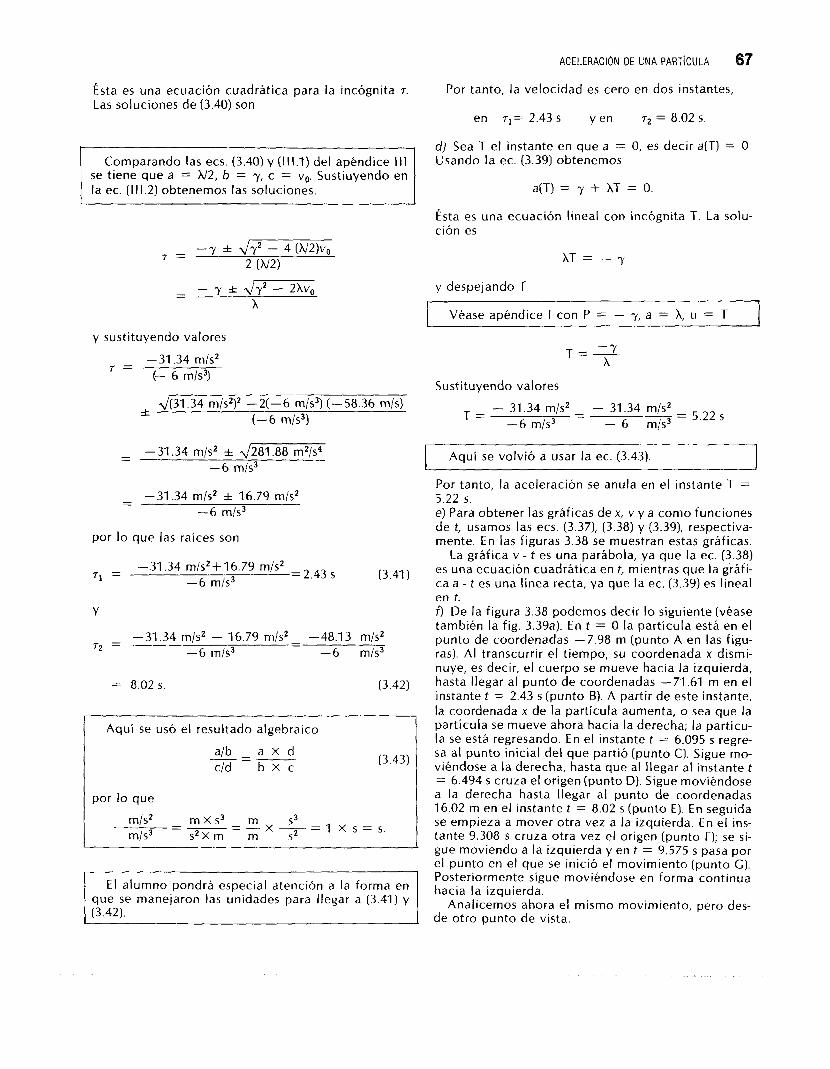
ACELERACIóN DE UNA PARTiCULA 67
ÉSta es una ecuación cuadrática para la incógnita T. Por tanto, la velocidad es cero en dos instantes, Las soluciones de (3.40) son
en rl= 2.43 S y en r2 = 8.02 s.
Comparando las ecs. (3.40) y (111.7) del apéndice I l l se tiene que a = N2, b = y, c = vo. Sustiuyendo en la ec. (111.2) obtenemos las soluciones.
y sustituyendo valores
- 31.34 mis2 (- 6 mis3]
T =
* J(31.34 m/s2)2 -2(-6 mis3) (-58.36 mis) ( -6 m/s3)
- - -31.34 mis2 f J281.88 m2/s4 -6 m/s3
- - -31.34 mis2 f 16.79 mis2 -6 m/s3
por lo que las raíces son
7-1 = -31.34 mis2+ 16.79 m/s2 - 6 mis3
= 2.43 S (3.41)
Y
72 = - 31.34 m/s2 - 16.79 mis2 - -48.1 3 mis2 -6 m/s3 -6 mis3
-
= 8.02 s. (3.42)
Aquí se usó el resultado algebraic0
aib - a X d c/d b X c -" (3.43)
por lo que
misZ - m x s 3 - m 53
mis3 s 2 x m m $2 X" - 1 x s = s .
E l alumno pondrá especial atención a la forma en que se manejaron las unidades para llegar a (3.41) y (3.42).
d) Sea T el instante en que a = O, es decir a(T) = O. Usando la ec. (3.39) obtenemos
a(T) = y + AT = O
Ésta es una ecuación lineal con incógnita T. La solu- ción es
y despejando T
1 Véase apéndice I con P = - y, a = X, u = T 1
Sustituyendo valores
T = - 31.34 mis2 - - 31.34 m/s2 -6 m/s3 - 6 m/s3
- " - 5.22 S
I Aquí se volvió a usar la ec. (3.43). I Por tanto, la aceleración se anula en el instante T = 5.22 s. e) Para obtener las gráficas de x, v y a como funciones de t, usamos las ecs. (3.371, (3.38) y (3.39), respectiva- mente. En las figuras 3.38 se muestran estas gráficas.
La gráfica v - t es una parábola, ya que la ec. (3.38) es una ecuación cuadrática en t, mientras que la gráfi- ca a - t es una línea recta, ya que la ec. (3.39) es lineal en t . f) De la figura 3.38 podemos decir lo siguiente (véase también la fig. 3.39a). En t = O la partícula está en el punto de coordenadas -7.98 m (punto A en las figu- ras). AI transcurrir el tiempo, su coordenada x dismi- nuye, es decir, el cuerpo se mueve hacia la izquierda, hasta llegar al punto de coordenadas -71.61 m en el instante t = 2.43 S (punto 6). A partir de este instante, la coordenada x de la partícula aumenta, o sea que la partícula se mueve ahora hacia la derecha; la partícu- la se está regresando. En el instante t = 6.095 S regre- sa al punto inicial del que partió (punto C). Sigue mo- viéndose a la derecha, hasta que al llegar al instante t = 6.494 S cruza el origen (punto D). Sigue moviéndose a la derecha hasta llegar al punto de coordenadas 16.02 m en el instante t = 8.02 S (punto E). En seguida se empieza a mover otra vez a la izquierda. En el ins- tante 9.308 S cruza otra vez el origen (punto F); se si- gue moviendo a la izquierda y en t = 9.575 S pasa por el punto en el que se inició el movimiento (punto C). Posteriormente sigue moviéndose en forma continua hacia la izquierda.
Analicemos ahora el mismo movimiento, pero des- de otro punto de vista.
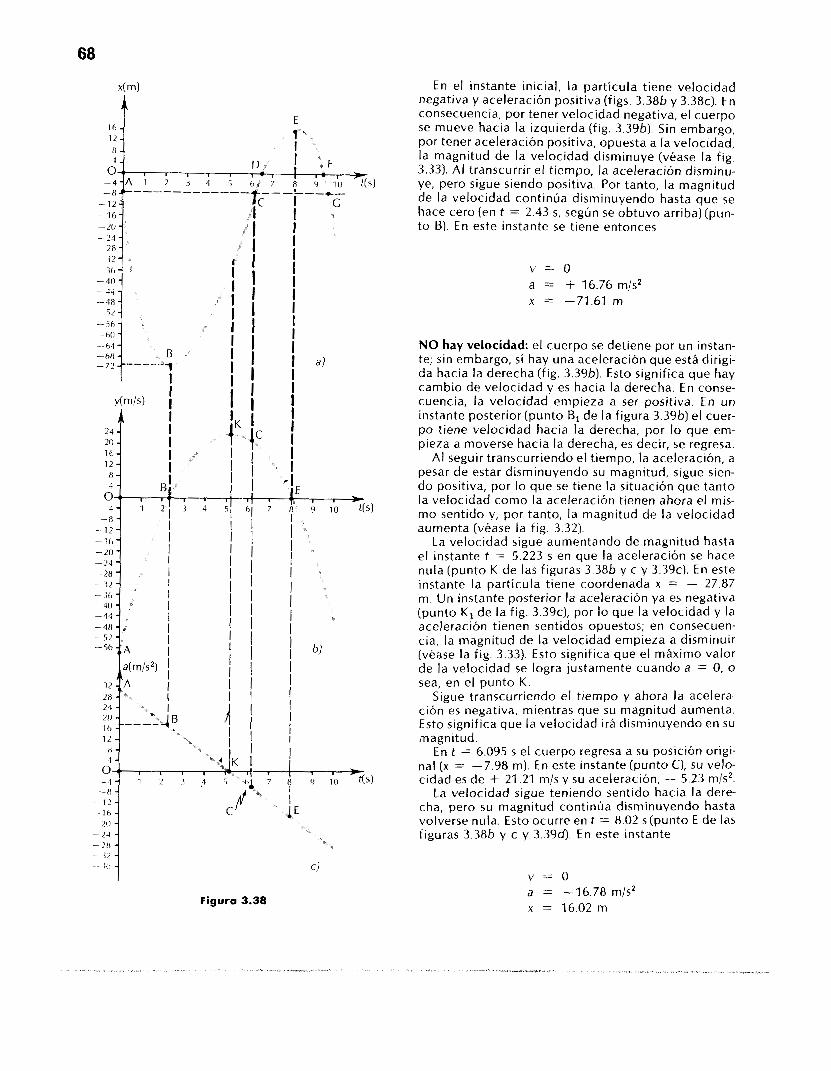
E f 1 1
4 ! I "
c i 8
I I 11
En el instante inicial, la partícula tiene velocidad negativa y aceleración positiva (figs. 3.38b y 3 .38~) . En consecuencia, por tener velocidad negativa, el cuerpo se mueve hacia la izquierda (fig. 3.39b). Sin embargo, por tener aceleración positiva, opuesta a la velocidad, la magnitud de la velocidad disminuye (véase la fig. 3.33). A l transcurrir el tiempo, la aceleración disminu- ye, pero sigue siendo positiva. Por tanto, la magnitud de la velocidad continúa disminuyendo hasta que se hace cero (en t = 2.43 S, según se obtuvo arriba) (pun- t o B). En este instante se tiene entonces
v = o a = + 16.76 mis2 x = -71.61 m
NO hay velocidad: el cuerpo se detiene por un instan- te; sin embargo, sí hay una aceleración que está dirigi- da hacia la derecha (fig. 3.39b). Esto significa que hay cambio de velocidad y es hacia la derecha. En conse- cuencia, la velocidad empieza a ser positiva. En un instante posterior (punto B, de la figura 3.39b) el cuer- po tiene velocidad hacia la derecha, por lo que em- pieza a moverse hacia la derecha, es decir, se regresa.
AI seguir transcurriendo el tiempo, la aceleración, a pesar de estar disminuyendo su magnitud, sigue sien- do positiva, por lo que se tiene la situación que tanto la velocidad como la aceleración tienen ahora el mis- mo sentido y, por tanto, la magnitud de la velocidad aumenta (véase la fig. 3.32).
La velocidad sigue aumentando de magnitud hasta el instante t = 5.223 S en que la aceleración se hace nula (punto K de las figuras 3.386 y c y 3 .39~) . En este instante la partícula tiene coordenada x = - 27.87 m. Un instante posterior la aceleración ya es negativa (punto K 1 de la fig. 3.39c), por lo que la velocidad y la aceleración tienen sentidos opuestos; en consecuen- cia, la magnitud de la velocidad empieza a disminuir (véase la f ig. 3.33). Esto significa que el máximo valor de la velocidad se logra justamente cuando a = O, O
sea, en el punto K . Sigue transcurriendo el tiempo y ahora la acelera-
ción es negativa, mientras que su magnitud aumenta. Esto significa que la velocidad irá disminuyendo en SU
,nagnitud. En t = 6.095 S el cuerpo regresa a su posición origi-
nal (X = -7.98 m). En este instante (punto c), SU velo- cidad es de + 21.21 m/s y su aceleración, - 5.23 mis2.
La velocidad sigue teniendo sentido hacia la dere- cha, pero su magnitud continúa disminuyendo hasta volverse nula. E s t o ocurre en t = 8.02 S (punto E de las figuras 3.38b y c y 3.39d). En este instante
v = o a = -16.78 m/s2 x = 16.02 m
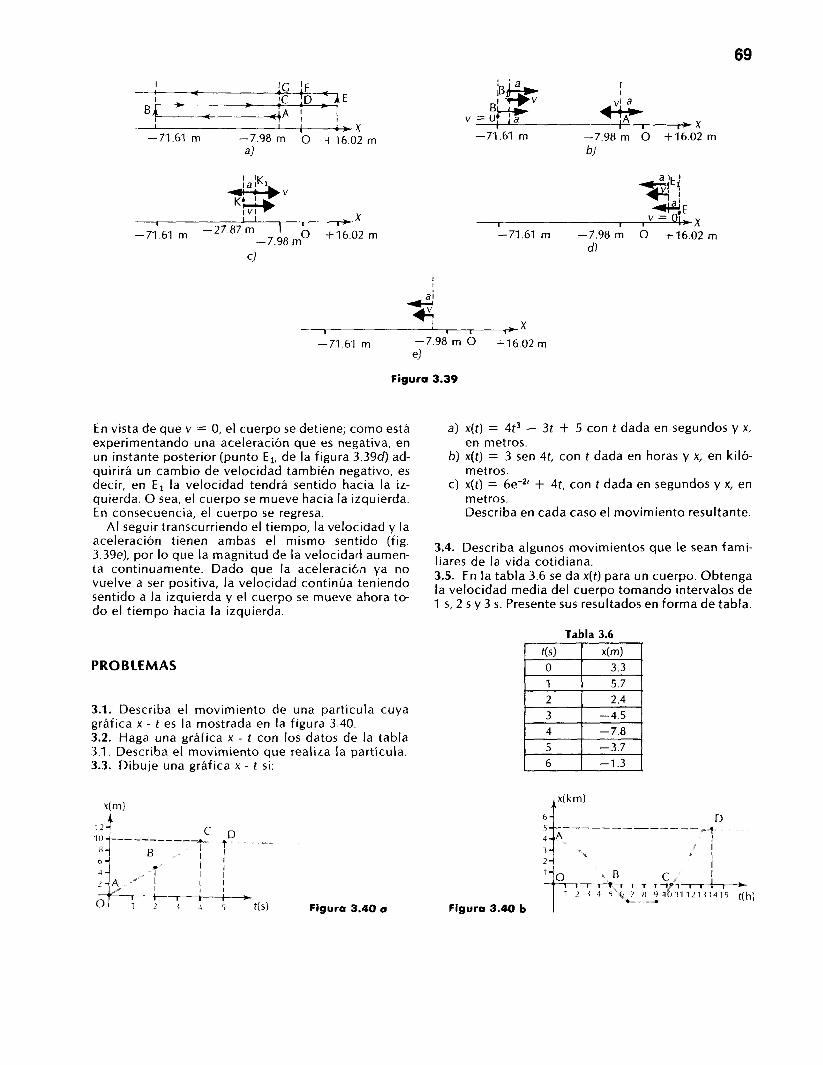
I I
-71.67 m -7.98 m O +16.02 m bl
-71.61 m -7.98 m 6 +16.02 m d )
I
&aj 9 ,x
1 I
-71.61 m "7.98 m 0 t 16.02 m el
Figura 3.39
En vista de que v = O, el cuerpo se detiene; como está experimentando una aceleración que es negativa, en un instante posterior (punto El, de la f igura 3.394 ad- quirirá un cambio de velocidad también negativo, es decir, en E l la velocidad tendrá sentido hacia la iz- quierda. O sea, el cuerpo se mueve hacia la izquierda. En consecuencia, el cuerpo se regresa.
A l segui.r transcurriendo el tiempo, la velocidad y la aceleración tienen ambas el mismo sentido (fig. 3.39e), por lo que la magnitud de la velocidad aumen- ta continuamente. Dado que la aceleracien ya no vuelve a ser positiva, la velocidad continúa teniendo sentido a la izquierda y el cuerpo se mueve ahora to- do el tiempo hacia la izquierda.
PROBLEMAS
3.1. Describa el movimiento de una partícula cuya gráfica x - t es la mostrada en la figura 3.40. 3.2. Haga una gráfica x - t con los datos de la tabla 3.1. Describa el movimiento que realiza la partícula. 3.3. Dibuje una gráfica x - t si:
a) x(t) = 4t3 - 3t + 5 con t dada en segundos y x, en metros.
b) x(t) = 3 sen 4t, con t dada en horas y x, en kiló- metros.
c) x(t) = 6e-2' + 4t, con t dada en segundos y x, en metros. Describa en cada caso el movimiento resultante.
3.4. Describa algunos movimientos que le sean fami- liares de la vida cotidiana. 3.5. En la tabla 3.6 se da x(t) para un cuerpo. Obtenga la velocidad media del cuerpo tomando intervalos de 1 S, 2 S y 3 s. Presente sus resultados en forma de tabla.
Tabla 3.6
I 3 I - 4 5 I 1 4 I - 7 8 I
-1 .3
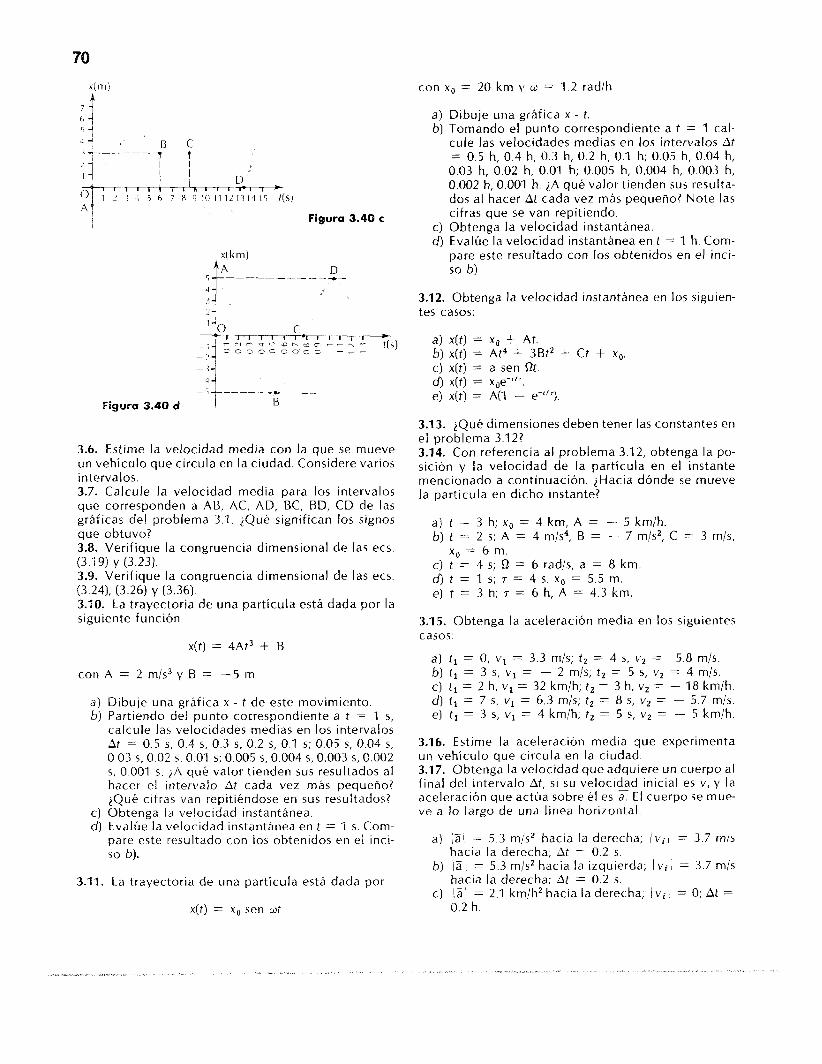
x(km)
""""" D -w-
4 3
2 1
3.6. Estime la velocidad media con la que se mueve un vehículo que circula en la ciudad. Considere varios intervalos. 3.7. Calcule la velocidad media para los intervalos que corresponden a AB, AC, AD, BC, BD, CD de las gráficas del problema 3.1. 2Qué significan los signos que obtuvo? 3.8. Verifique la congruencia dimensional de las ecs. (3.1 9) y (3.23). 3.9. Verifique la congruencia dimensional de las ecs. (3.24), (3.26) y (3.36). 3.10. La trayectoria de una partícula está dada por la siguiente función
x(t) = 4At3 + B
con A = 2 mis3 y B = -5 m
a) Dibuje una gráfica x - t de este movimiento. b) Partiendo del punto correspondiente a t = 1 S,
calcule las velocidades medias en los intervalos At = 0 . 5 S, 0.4 S, 0.3 S, 0.2 S, 0.1 S ; 0.05 S, 0.04 S, 0.03 S, 0.02 S, 0.01 S ; 0.005 S, 0.004 S , 0.003 S, 0.002 S, 0.001 s. > A qué valor tienden sus resultados al hacer el intervalo At cada vez más pequeño? iQué cifras van repitiéndose en sus resultados?
c) Obtenga ¡a velocidad instantánea. d) Evalúe la velocidad instantánea en t = 1 s. Com-
pare este resultado con los obtenidos en el inci- so b).
con x. = 20 k m v w = 1.2 radih
a) Dibuje una gráfica x - t. b) Tomando el punto correspondiente a t = 1 cal-
cule las velocidades medias en los intervalos At = 0.5 h, 0.4 h, 0.3 h, 0.2 h, 0.1 h; 0 . 0 5 h, 0.04 h, 0.03 h, 0.02 h, 0.01 h; 0.005 h, 0.004 h, 0.003 h, 0.002 h, 0.001 h. i A qué valor tienden sus resulta- dos al hacer At cada vez más pequeño? Note las cifras que se van repitiendo.
c) Obtenga la velocidad instantánea. dj Evalúe la velocidad instantánea en t = 1 h. Com-
pare este resultado con los obtenidos en el inci- so b).
3.12. Obtenga la velocidad instantánea en los siguien- tes casos:
a) x(t) = x. + At. b) x(t) = At4 + 3Bt2 + Ct + xo. c) x(t) = a sen Qf. d ) x(t) = xoe-*'r. e) x(t) = A(? -
3.13. iQué dimensiones deben tener las constantes en el problema 3.121 3.14. Con referencia al problema 3.12, obtenga la po- sición y la velocidad de la partícula en el instante mencionado a continuación. iHacia dónde se mueve la partícula en dicho instante?
a ) t = 3 h; x. = 4 km, A = - 5 km/h. b) t = 2 S; A = 4 m/s4, B = - 7 m/s2, C = 3 mis,
c ) t = 4 S; 0 = 6 rad/s, a = 8 km. d) t = 1 S; T = 4 s. x. = 5.5 m. e) t = 3 h; 7 = 6 h, A = 4.3 km.
x. = 6 m.
3.15. Obtenga la aceleración media en los siguientes casos:
a) t l = O, v1 = 3 . 3 m/s; t2 = 4 S , v2 = 5.8 mis. b) t l = 3 S, v1 = - 2 mis; t2 = 5 S, v2 = 4 mis. c) t l = 2 h, v1 = 32 kmih; t2 = 3 h, v2 = - 18 km/h. d ) tl = 7 S, v1 = 6.3 m/s; t2 = 8 S, v2 = - 5.7 mis. e) t l = 3 S, v1 = 4 kmih; t 2 = 5 S , v2 = - 5 km/h.
3.16. Estime la aceleración media que experimenta un vehículo que circula en la ciudad. 3.17. Obtenga la velocidad que adquiere un cuerpo al f inal del intervalo At, s i su velocidad inicial es v, y la aceleración que actúa sobre éI es E l cuerpo se mue- ve a lo largo de una linea horizontal.
a ) Iá( = 5 . 3 misZ hacia la derecha; I v i l = 3.7 mis
I
3.11. La trayectoria de una partícula está dada por
x(t) = x" sen ut
hacia la derecha; At = 0.2 s. b) / a 1 = 5.3 mis2 hacia la izquierda;
hacia la derecha; At = 0.2 s. c) la1 = 2.1 km/h2 hacia la derecha;
0.2 h.
vil = 3.7 mis
v;I = O ; At =

PROBLEMAS 71
dl 12 I = 2.1 km/h2 hacia la izquierda; I vil = O; At
e) la I = 20.7 m/s2 hacia la derecha; l v i l = 2.8 mis = 0.2 h.
hacia la izquierda; At = 0.2 s.
En cada caso haga un diagrama de la velocidad y aceleración en los instantes inicial y final. Explique el efecto de la aceleración. 3.18. Obtenga la aceleración instantánea para los ca- sos del problema 3.12. 3.19. Evalúe las aceleraciones que obtuvo en el pro- blema 3.18 en los instantes dados en el problema 3.14. 2Qué efecto tiene, en ese instante, la aceleración sobre la velocidad?
3.20. Para los casos de los problemas 3.12 y 3.18 (con los valores de las constantes dados en el problema 3 .I 4):
a) iEn qué instante(s) v = O? b) 2En qué instante(s) a = O? c) Crafique x, v y a como funciones de t . d ) Discuta en cada caso el movimiento del cuerpo.
En particular, obtenga la aceleración que actúa sobre el cuerpo en el instante en que v = O. iCÓmo prosigue su movimiento el cuerpo después de es- tos instantes? >Por qué?
4 Cinemática de u n a partÍcula U n a d i m e n s i ó n ( 1 1 )
En el capítulo anterior llegamos a la conclusión de que si se conoce la trayectoria x(t) de una partícula, podemos determinar su velocidad instantánea v(0, y una vez conocida esta cantidad, se puede encontrar la aceleración instantánea a(t).
Como estudiaremos en capítulos posteriores, un tipo de situación muy común en física, ingeniería, quí- mica, etc., es que se puede encontrar la aceleración que experimenta un cuerpo y entonces uno quisiera determinar tanto la velocidad como la trayectoria de la partícula. t s decir, este problema es el inverso ai tratado en el capítulo anterior.
s i se v( t ) conoce y jse pueden conocer
a(t), x(#)?
Para atacar este problema vamos a necesitar tener a la ma,no algunos resultados sobre movimiento uni- forme. Estos los obtendremos en la siguiente sección.
4.1. MOVIMIENTO UNIFORME
En el capítulo 3, ejercicio 3.9, estudiamos que el movimiento uniforme es el que lleva a cabo un cuer- po s i su velocidad tiene, todo el tiempo, el mismo va- lor, es decir, s i la velocidad es constante. Llamaremos a esta constante vo
v(t) = vo (4.1 1
En el ejercicio 3.19 vimos que en un movimiento uni- forme la aceleración que experimenta el cuerpo es cero
S i la aceleración es cero, quiere decir que no hay cambio de velocidad, o sea que la velocidad es siem- pre la misma.
Nos damos cuenta de que la primera parte del pro- blema planteado al inicio del capítulo ya lo tenemos resuelto para este movimiento
s i a(t) = O, entonces v(t) = vg (4.3)
La posición x(t) para este movimiento la encontrare- mos de la manera siguiente. De la definición (3.12) se tiene que
Ax At
vg = - (4.4)
con AX = x 2 - x1 y At = t 2 - tl. Despejamos Ax de (4.4)
AX voAt (4.5a) o bien
x p - x1 = v,(t2 - t l )
= v,tp - vot1 (4.5b)
Aquí se ut i l izó la definición (3.12) de velocidad me- dia, y en lugar de la velocidad media V se usó el va- lor de la velocidad vg que tiene el cuerpo en movi- miento uniforme, que resulta ser la velocidad instan- tánea (véase la ec. (4.3)). En el movimiento uniforme V = vo = v(t). En otros movimientos NO es cierto que la velocidad media V se pueda sustituir por la ' velocidad instantánea.
Dado que x2 y x1 [así como t2 y tl) son arbitrarios, po- demos usar, en particular, los valores
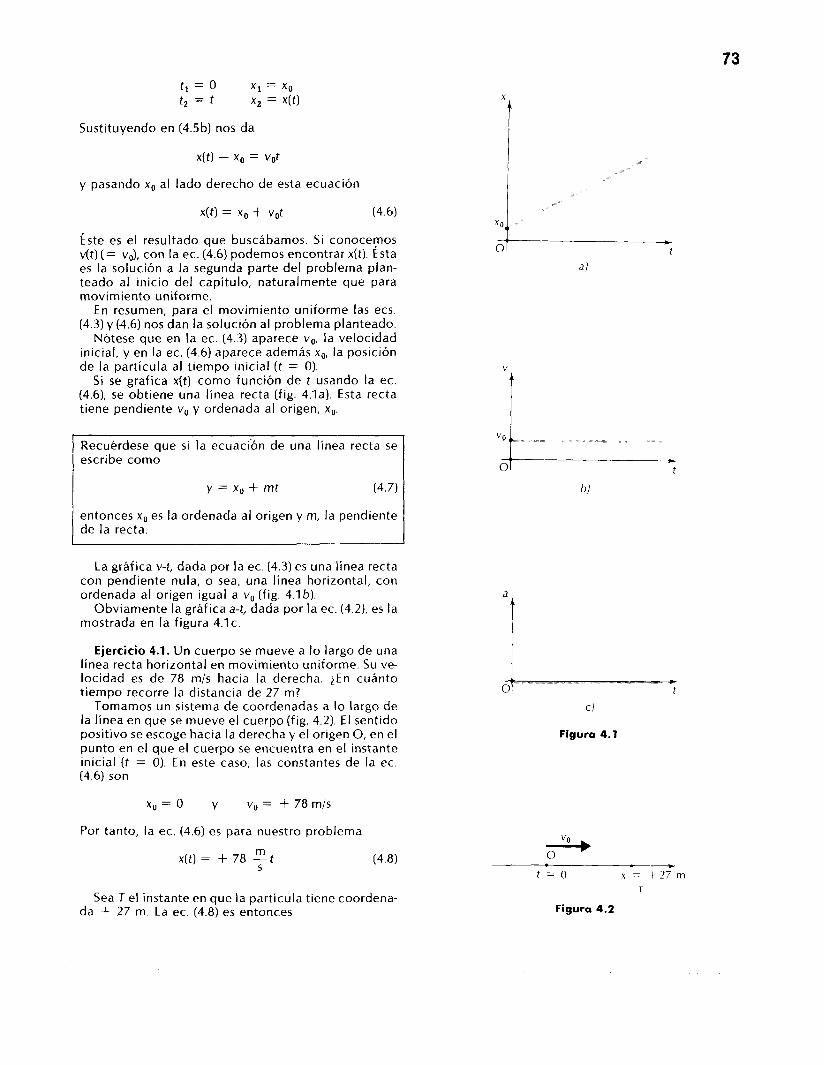
73 tl = o x1 = x0
t , = t XI = x(t)
Sustituyendo en (4.5b) nos da
x(t) - x0 = vot
y pasando x. al lado derecho de esta ecuación
x(t) = Y o + vot (4.6)
Éste es el resultado que buscábamos. Si conocemos v(t) (= va), con la ec. (4.6) podemos encontrar x(t). Esta es la solución a la segunda parte del problema plan- teado al inicio del capítulo, naturalmente que para movimiento uniforme.
En resumen, para el movimiento uniforme las ecs. (4.3) y (4.6) nos dan la solución al problema planteado.
Nótese que en la ec. (4.3) aparece vo, la velocidad inicial, y en la ec. (4.6) aparece además xo, la posición de la partícula al t iempo inicial ( t = O).
S i se grafica x(t) como función de t usando la ec. (4.6), se obtiene una línea recta (fig. 4.la). Esta recta tiene pendiente v,, y ordenada al origen, xo.
Recuérdese que s i la ecuacion de una línea recta se escribe como
y = x,, + rnt (4.7)
entonces x. es la ordenada al origen y m, la pendiente de la recta.
La gráfica v-t, dada por la ec. (4.3) es una línea recta con pendiente nula, o sea, una línea horizontal, con ordenada al origen igual a v,, (f ig. 4.lb).
Obviamente la gráfica a-t, dada por la ec. (4.21, es la mostrada en la figura 4.1 c.
Ejercicio 4.1. Un cuerpo se mueve a lo largo de una línea recta horizontal en movimiento uniforme. Su ve- locidad es de 78 m/s hacia la derecha. jEn cuánto tiempo recorre la distancia de 27 m?
Tomamos un sistema de coordenadas a lo largo de la línea en que se mueve el cuerpo (fig. 4.2). E l sentido positivo se escoge hacia la derecha y el origen O, en el punto en el que el cuerpo se encuentra en el instante inicial ( t = O). En este caso, las constantes de la ec. (4.6) son
x,, = O y vo = + 78 m/s
Por tanto, la ec. (4.6) es para nuestro problema
x(t) = + 78 - t m S
Sea J el instante en que la particula tiene coordena- da + 27 m. La ec. (4.8) es entonces
a
C )
Figuro 4.1
L
t = 0 x = + 2 7 m
T
Figura 4.2
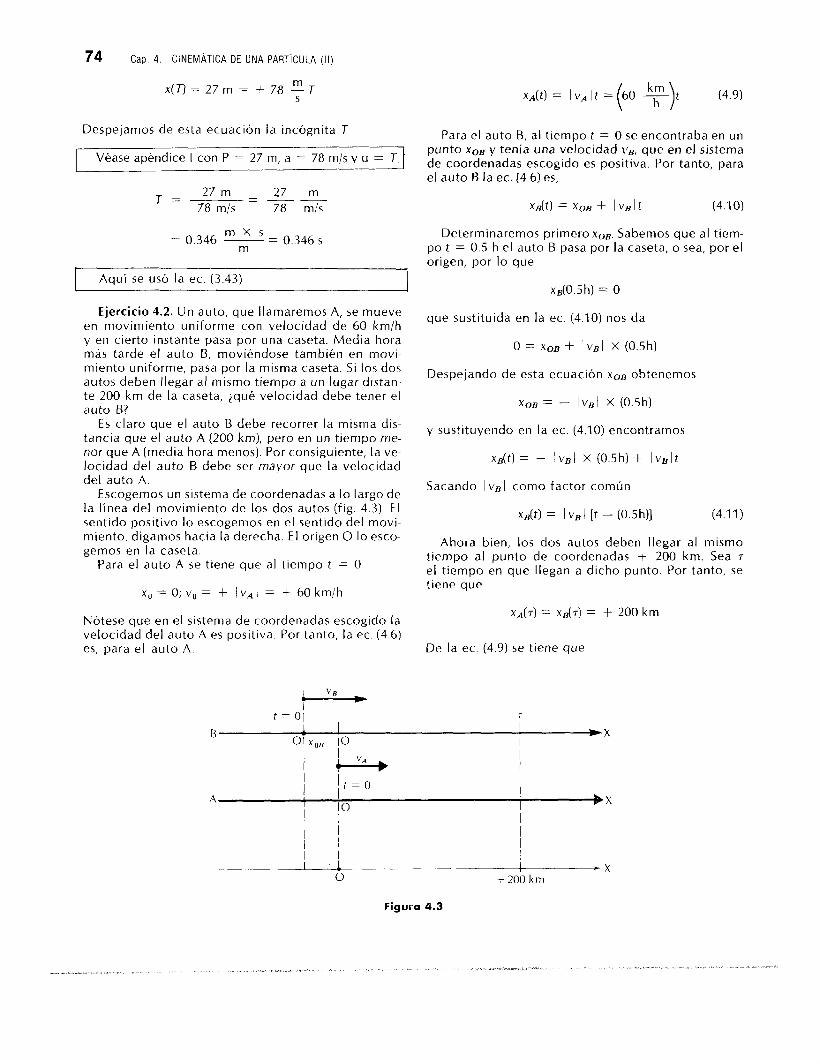
74 Cap. 4. CINEMATICA DE UNA PART~CULA ( 1 1 )
x(T) = 27 m = + 78 - T m S
Despejamos de esta ecuacion la incógnita T
I Véase apéndice I con P = 27 m, a = 78 mis y u = T. 1 27 m - 27 m
78 mis 78 mis T = "~
= 0.346 ~ - m X S -
m 0.346 S
I Aquí se usó la ec. (3.43) "1 Ejercicio 4.2. Un auto, que l lamaremos A, se mueve
en movimiento uniforme con velocidad de 60 km/h y en cierto instante pasa por una caseta. Media hora más tarde el auto B, moviéndose también en movi- miento uniforme, pasa por la misma caseta. Si los dos autos deben llegar al mismo tiempo a un lugar distan- te 200 km de la caseta, iqué velocidad debe tener el auto B?
Es claro que el auto B debe recorrer la misma dis- tancia que el auto A (200 km), pero en un tiempo me- nor que A (media hora menos). Por consiguiente, la ve- locidad del auto B debe ser mayor que la velocidad del auto A.
Escogemos un sistema de coordenadas a lo largo de la línea del movimiento de los dos autos (fig. 4.3). E l sentido positivo lo escogemos en el sentido del movi- miento, digamos hacia la derecha. E l origen O lo esco- gemos en la caseta.
Para el auto A se tiene que al tiempo t = O
xu O; V" = + / V A I = + 60 kmih
Nótese que en el sistema de coordenadas escogido la velocidad del auto A es positiva. Por tanto, la ec. (4.6) es, para el auto A .
t = 01
Para el auto B, al tiempo t = O se encontraba en un punto xoB y tenía una velocidad vB, que en el sistema de coordenadas escogido es positiva. Por tanto, para el auto B la ec. (4.6) es,
X,&) = XOB + I VB I f (4.10)
Determinaremos primeroxoB. Sabemos que al tiem- po t = 0.5 h el auto B pasa por la caseta, o sea, por el origen, por lo que
xg(0.5h) = O
que sustituida en la ec. (4.10) nos da
O = xOB + IvBI X (0.5h)
Despejando de esta ecuación x O B obtenemos
xOB = - I V E / X (0.5h)
y sustituyendo en la ec. (4.10) encontramos
X d f ) = - IvBI X (0.5h) + IVBIt
Sacando I v B / como factor común
xdt) = I [t - (0.5h)l (4.1 1 )
Ahora bien, los dos autos deben llegar al mismo tiempo al punto de coordenadas + 200 km. Sea 7 el t iempo en que l legan a dicho punto. Por tanto, se tiene que
De la ec. (4.9) se tiene que
7
B I 1 O L O R IO I
1 1 I I
l IO I
I ' I I 1
t X
I +-•
! ' I
I I i t - o I A I ,X
I I "
1
+ 200 km I
O * X
Figura 4.3
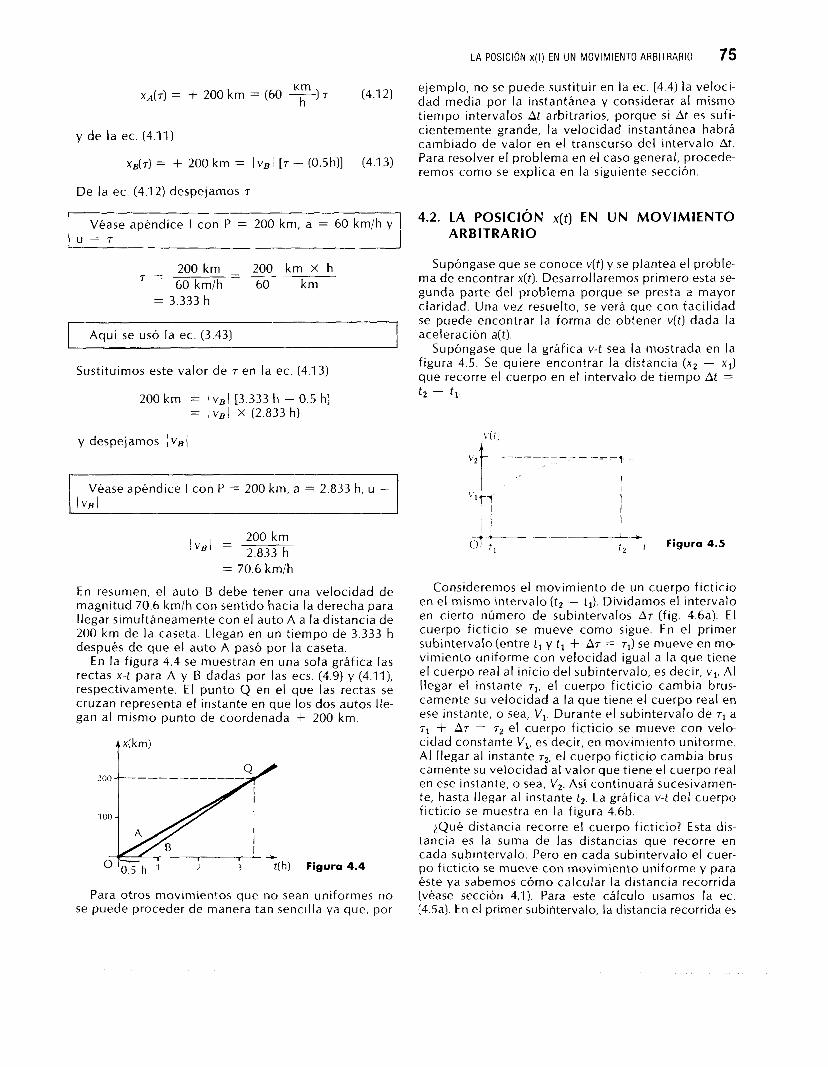
LA POSICIóN x(t) EN UN MOVIMIENTO ARBITRARIO 75
x A ( 7 ) = + 200 k m = (60 "-1 7 Km (4.12) ejemplo, no se puede sustituir en la ec. (4.4) la veloci- h dad media por la instantánea y considerar al mismo
tiempo intervalos At arbitrarios, porque s i At es Sufi-
y de la ec. (4.11) cientemente grande, la velocidad instantánea habrá cambiado de valor en el transcurso del intervalo At. xg(7) = + 200 km = 1 v B l [ T - (0,5h)l (4.13) Para resolver el problema en el caso general, procede-
remos como se explica en la siguiente sección. De la ec. (4.12) despejamos 7
Véase apéndice I con P = 200 km, a = 60 kmih y 4.2. LA POSICIóN x(t) EN UN MOVIMIENTO u = 7 ARBITRARIO
200 k m - 200 k m X h 60 kmih 60 k m 7 = "
= 3.333 h
I Aquí se usó la ec. (3.431 I Sustituimos este valor de 7 en la ec. (4.13)
200 k m = / v B / [3.333 h - 0.5 h] = I vBI X (2.833 h)
y despejamos 1 vg /
Véase apéndice I con P = 200 km, a = 2.833 h, u = I (vi31
/ V E # / = 200 k m 2.833 h
= 70.6 kmih
En resumen, el auto B debe tener una velocidad de magnitud 70.6 kmih con sentido hacia la derecha para llegar simultáneamente con el auto A a la distancia de 200 km de la caseta. Llegan en un t iempo de 3.333 h después de que e l auto A pasó por la caseta.
En la figura 4.4 se muestran en una sola gráfica las rectas x - t para A y B dadas por las ecs. (4.9) y (4,11), respectivamente. E l punto Q en el que las rectas se cruzan representa el instante en que los dos autos Ile- gan al mismo punto de coordenada + 200 km.
t x(km)
\ t(h) Figura 4.4
Para otros movimientos que no sean uniformes no se puede proceder de manera tan sencilla ya que, por
Supóngase que se conoce v(t) y se plantea el proble- ma de encontrar x(t). Desarrollaremos primero esta se- gunda parte del problema porque se presta a mayor claridad. Una vez resuelto, se verá que con facilidad se puede encontrar la forma de obtener v(t) dada la aceleración a(t).
Supóngase que la gráfica v-t sea la mostrada en la figura 4.5. Se quiere encontrar la distancia ( x , - x,) que recorre el cuerpo en el intervalo de tiempo At = t , - t,.
L'(t1
"""_ - """ 1 I I
Consideremos el movimiento de un cuerpo ficticio en el mismo intervalo ( t , - t , ) . Dividamos el intervalo en cierto número de subintervalos A7 (fig. 4.6a). E l cuerpo f ict icio se mueve como sigue. En el primer subintervalo (entre t , y t , + AT = 7,) se mueve en mo- vimiento uniforme con velocidad igual a la que t iene el cuerpo real al inicio del subintervalo, es decir, v,. AI llegar el instante T,, el cuerpo ficticio cambia brus- camente su velocidad a la que tiene el cuerpo real en ese instante, o sea, VI. Durante el subintervalo de 71 a 71 + A7 = T , el cuerpo f icticio se mueve con velo- cidad constante V,, es decir, en movimiento uniforme. AI llegar al instante T ~ , el cuerpo ficticio cambia brus- camente su velocidad al valor que tiene el cuerpo real en ese instante, o sea, V,. Así continuará Sucesivamen- te, hasta llegar al instante t,. La gráfica v-t del cuerpo f ict ic io se muestra en la figura 4.6b.
iQué distancia recorre el cuerpo f icticio? Esta dis- tancia es la suma de las distancias que recorre en cada subintervalo. Pero en cada subintervalo el cuer- po f ic t ic io se mueve con movimiento uniforme y para este ya sabemos cómo calcular la distancia recorrida (véase sección 4.1). Para este cálculo usamos la ec. (4.5a). En el primer subintervalo, la distancia recorrida es
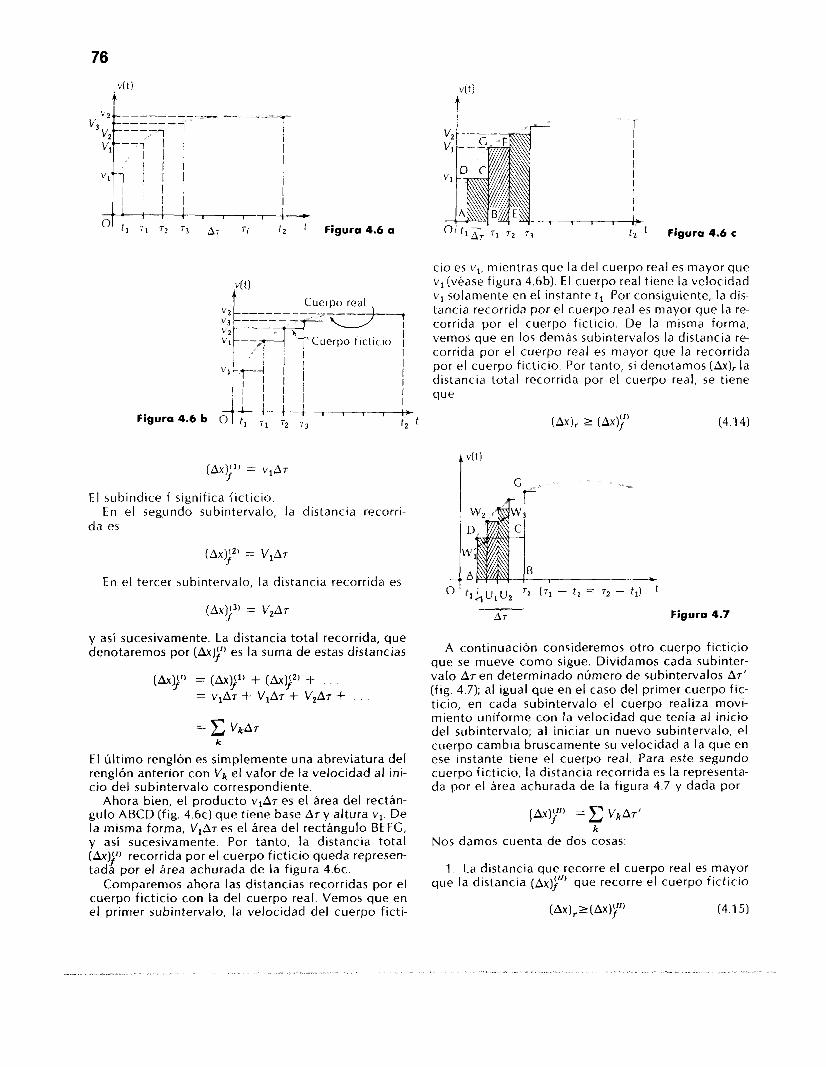
Figura 4.6 o
I I
-t Figura 4.6 c
cio es vl, mientras que la del cuerpo real es mayor que
v1 solamente en el instante tl. Por consiguiente, la dis-
"3 ------ ; ; b y ekill vemos que en los demás subintervalos la distancia re- I corrida por el cuerpo ficticio. De la misma forma,
I corrida por el cuerpo real es mayor que la recorrida "1
I por el cuerpo ficticio. Por tanto, s i denotamos ( A x ) , la [ distancia total recorrida por el cuerpo real, se tiene
"it) v1 (véase figura 4.6b). E l cuerpo real tiene la velocidad
v, "" """"" tancia recorrida por el cuerpo real es mayor que la re- Cuerpo real
1 ' ; I I I / I I 1 I que Figura 4.6 b O +-&" t , 71 72 r3
t 2 (Ax), 2 (Ax):' (4.1 4)
E l subíndice f significa iicticio.
da es En el segundo subintervalo, la distancia recorri-
(Ax);z' = V 1 AT
En el tercer subintervalo, la distancia recorrida e5
(Axv3) = V2Ar
y así sucesivamente. La distancia total recorrida, que denotaremos por (AxJ;) es la suma de estas distancias
(&)y) = ( A x p + (&);2' + . . . v1AT + VIA7 + VZAT +
= VkAr k
E l último renglón es simplemente una abreviatura del renglón anterior con Vk el valor de la velocidad al ini- cio del subintervalo correspondiente.
Ahora bien, el producto vlAr es el área del rectán- gulo ABCD (fig. 4 .6~ ) que t i ene base AT y altura vl. D e la misma forma, VIAr es el área del rectángulo BEFC, y así sucesivamente. Por tanto, la distancia total (Ax)?) recorrida por el cuerpo ficticio queda represen- tada por el área achurada de la figura 4 . 6 ~ .
Comparemos ahora las distancias recorridas por el cuerpo f ict icio con la del cuerpo real. Vemos que en el primer subintervalo, la velocidad del cuerpo ficti-
A continuación consideremos otro cuerpo f icticio que se mueve como sigue. Dividamos cada subinter- valo Aren determinado número de subintervalos AT' (fig. 4.7); al igual que en el caso del primer cuerpo fic- ticio, en cada subintervalo el cuerpo realiza movi- miento uniforme con la velocidad que tenía al in ic io del subintervalo; al iniciar un nuevo subintervalo, el cuerpo cambia bruscamente su velocidad a la que en ese instante tiene el cuerpo real. Para este segundo cuerpo ficticio, la distancia recorrida es la representa- da por el área achurada de la figura 4.7 y dada por
k Nos damos cuenta de dos cosas:
1. La distancia que recorre el cuerpo real es mayor que la distancia (AX);"' que recorre el cuerpo f icticio
(Ax),z(Ax);"' (4.1 5)
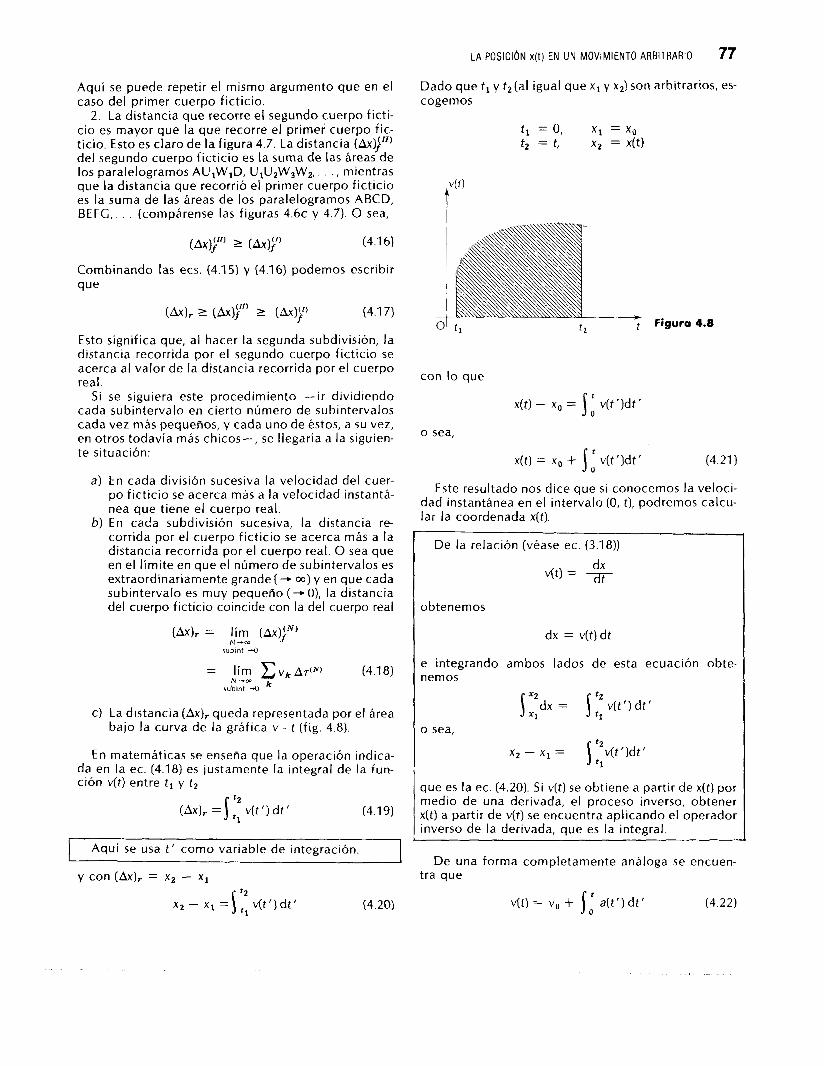
LA POSlCldN x(t) EN UN MOVIMIENTO ARBITRARIO 77
Aquí se puede repetir el mismo argumento que en el caso del primer cuerpo ficticio.
2. La distancia que recorre el segundo cuerpo ficti- cio es mayor que la que recorre el primer cuerpo fic- t icio, Es to es claro de la figura 4.7. La distancia (Ax))”) del segundo cuerpo ficticio es la suma de las áreas de los paralelogramos AUIWID, U1UzW3Wz,. . . , mientras que la distancia que recorrió el primer cuerpo ficticio es la suma de las áreas de los paralelogramos ABCD, BEFC,. . (compárense las figuras 4 . 6 ~ y 4.7). O sea,
(Ax)? 2 (Ax)? (4.1 6)
Combinando las ecs. (4.15) y (4.16) podemos escribir que
( A x ) , z (Axf’) 2 ( A x y (4.1 7)
Esto significa que, al hacer la segunda subdivisión, la distancia recorrida por el segundo cuerpo ficticio se acerca al valor de la distancia recorrida por el cuerpo real.
Si se siguiera este procedimiento -ir dividiendo cada subintervalo en cierto número de subintervalos cada vez más pequenos, y cada uno de éstos, a su vez, en otros todavía más chicos-, se llegaría a la siguien- te situación:
a) En cada división sucesiva la velocidad del cuer- po f ic t ic io se acerca más a la velocidad instantá- nea que tiene el cuerpo real.
b) En cada subdivisión sucesiva, la distancia re- corrida por e l cuerpo f ict icio se acerca más a la distancia recorrida por el cuerpo real. O sea que en el límite en que el número de subintervalos es extraordinariamente grande (-+ m) y en que cada subintervalo es muy pequeno (-O), la distancia del cuerpo ficticio coincide con la del cuerpo real
(Ax), = l ím rubtnt “o
N -m
= l im C v k ~ T ( ~ ) (4.1 8) N -m
sublnt 4
C) La distancia (Ax), queda representada por el área bajo la curva de la gráfica v - t (fig. 4.8).
En matemáticas se enseña que la operación indica- da en la ec. (4.18) es justamente la integral de la fun- ción v(t) entre t , y t ,
t? (Ax), = S tl v(t ’) dt ’ (4.1 9 )
Aquí se usa t ’ como variable de integración. 1 y con ( A x ) , = x, - x1
t 2
x2 - x1 = tl v(t’) d t ’ (4.20)
Dado que tl y t2 (al igual que x1 y x,) son arbitrarios, es- cogemos
t l = o, x1 = x0 tz = t, x, = x(t)
il“
con lo que
o sea,
Este resultado nos dice que s i conocemos la veloci- dad instantánea en el intervalo (O , t), podremos calcu- lar la coordenada x(t).
De la relación (véase ec. (3.18))
obtenemos
dx = v(t) d t
e integrando ambos lados de esta ecuación obte- nemos
I o sea,
que es la ec. (4.20). S i v(t) se obtiene a partir de x(t) por medio de una derivada, el proceso inverso, obtener x(t) a partir de v(t) se encuentra aplicando el operador inverso de la derivada, que es la integral.
De una forma completamente análoga se encuen-
v(t) = vo + 1; a(t ‘ )dt ‘ (4.22)
tra que

78 Cap. 4. ClNEMATlCA DE UNA PARTíCULA ( 1 1 )
en donde vO = v(t = O) es la velocidad inicial de la partícula.
Por tanto, s i se conoce a(t), con ayuda de la ec. (4.22) se puede encontrar la velocidad instantánea v(t). Una vez obtenida esta velocidad, utilizando la ec. (4.21) se puede encontrar la posición de la particula x(t), o sea, la trayectoria.
De las ecs. (4.21) y (4.22) se observará que para de- terminar x ( t ) y v(t), se necesita conocer x. y vO, los valo- res iniciales de la posición y de la velocidad. A esto se le llama dar las condiciones iniciales.
Nótese que si se da la aceleración a(t), para en- contrar la trayrctoria x(t) es necesario efectuar dos integraciones. Este es el proceso inverso de la opera- ción dada en la ec. (3.32), que consiste en dos deriva- das. Ahora bien, al llevar a cabo una integración se presenta una constante de integración; por tanto, en 9uestro caso aDarecen dos constantes de integración. Estas con precisamente x. y vo de las ecs. (4.21) y (4.22).
Ejercicio 4.3. Usando las ecuaciones obtenidas, en- cuentre la trayectoria x(t) para el caso de a = O.
Este caso de aceleración nula es el del movimiento
Ejercicio 4.4. Obtener la trayectoria de una partícu- la, s i la aceleración que experimenta es
a(t) = St2 + Nt3 (4.25)
siendo S y N constantes. En este caso la aceleración no es constante, sino
que cambia de valor al transcurrir el tiempo. Primero obtendremos la velocidad instantánea. Para ello, sus- tituimos (4.25) en la ec. (4.22)
v(t) = vO + 5 : (St’2 + Nt ’3) dt’
Del cálculo integral se tienen los siguientes resulta- dos:
a) la integral de una suma es la suma de las integrales
$[u(t) + w(t)] dt = u(t1 d t + w(t)dt (4.26) S S b) si A es una constante
[ A u ( t ) dt = A u(t) dt S (4.27)
uniforme. Sustituyendo el valor de a en la ec. (4.22) obtenemos (4.28)
n l
v(t) = vO + 3 ; Odt’ - - Vn (4.23)
por lo que, usando (4.26) . ,
ya que la integral de cero se anula. Este resultado nos dice que la velocidad en cualquier instante es igual a y ahora (4,27) vO, el valor en el instante t = O.
v(t) = vo + $‘ St‘2dt‘ + 5 ’ N t ‘ 3 d t ’ O o
Ahora sustituimos (4.23) en la ec. (4.21) v(t) = vO + S S,’ t ’ 2 d t ’ + N i t t ’ 3 d t ‘ O
x(t) = xO + 1‘ v,dt’ O En seguida utilizamos (4.28) en el segundo y en el ter-
y como vO es constante puede salir fuera de la integral cer términos
v(t) = vo + S “ t ’ 3 1 + N - t y 1 1 x(t) = x g + vg 1 d t ’ 3 4
O
= x g + v,t ’ 1 : = x g + v,(t - O),
o sea, x( t ) = X ” + v,t (4.24)
1 Aquí se usó el hecho de que la integral indefinida I d t ‘ = t ‘
*2 f 2
tl y además, de que t:t = t ’ 1
= ( t z - tl)
Las ecs. (4.23) y (4.24) son justamente las ecuaciones para el movimiento uniforme obtenidas en la sección 4.1 (véanse las ecs. (4.3) y (4.6)).
F e tiene que ‘I u( t ’ ) I :: = u(tJ - u(t1) (4.29)
por lo que
v(t) = vO + 7 1 S ( t 3 - 03) + -q 1 N(t4 - 04)
y finalmente “ v(t) = vO + T S t 3 I + 7 I Nt4 (4.30)
Una vez obrenida la velocidad instantánea proce- deremos a encontrar la trayectoria x(t) con ayuda de la ec. (4.21)

LA POSICIóN x(t) EN UN MOVIMIENTO ARBITRARIO 79
que usando las ecs. (4.26) a (4.29) nos da a(t) = aoe-f/r (4.32)
x(t) = x. + \ v,dt’ + S , ~ S t ’ ~ d t ’ t 1
+ 1; Nt ’4dt ’
= x, + v, \ d t ‘ + - S \ ‘ t f 3 d t ’ 1 O 3 0
1 + 7 N j: t t 4d t ’
t l 1 t 1 1 3 4 0 4 5 = x. + votr( ,+ -S - P I + -N -4
= x. + vo(t - o) + - s(t4 - 04) I
12
1 20 + - N(t5 - 05)
y finalmente
x(t) = x, + vot + - St4 + - Nt5 (4.31) 1
12 20
En esta expresión a , es una aceleración constante; e (= 2.71828. . . ) es la base de los logaritmos naturales y T es un t iempo constante.
a) Obtener la velocidad y la trayectoria del cuerpo b) Discutir los resultados.
La aceleración a(t) dada por la ec. (4.32), que actúa sobre el cuerpo no es constante sino que cambia con el tiempo.
a) Para encontrar la velocidad sustituimos (4.32) en la ec. (4.22)
v(t) = v, + a,e-t/r’ dt’
Aquí vo es la velocidad inicial que t iene el cuerpo. Por ser a, constante, usamos la ec. (4.27)
v(t) = v, + a , ‘ e-”Irdt’ S O
Ahora efectuamos la integral
Ejercicio 4.5. Compruebe que la ec. (4.30) del ejerci- cio 4.4 es correcta.
Una forma de hacer la comprobación es encontrar a partir de la velocidad instántanea v(t), ec. (4.30), la aceleración que le corresponde, usando la ec. (3.31).
d dt a(t) = -
Usando las ecs. (3.20) a (3.23) encontramos
a(t) = - dt d v, + &( + S t 3 ) + d ( a N t 4 )
I d 1 d = “S - 3 dt t 3 + ”N -t4 4 dt
= ”S X 3t2 + -N X 4t3 1 1 3 4
= StZ + Nt3
que es precisamente la aceleración (4.25) de la que se partió.
De la misma forma se puede comprobar, usando la ec. (3.181, que el resultado para la posición x(t), dado por la ec. (4.31) es correcto. Esto se deja de ejercicio al lector.
E l ejercicio 4.5 i lustra la manera en que uno mismo puede verificar los resultados que obtiene. Es impor- tante desarrollar esta disciplina de autoverificación.
Ejercicio 4.6. Sobre un cuerpo se ejerce la acelera- ción
Si Tes constante, la integral de la exponencial e-tires
(4.33) S e-tyr dt ’ -Te-f ‘ /7
ya que eo = 1 v(t) = v, - aOTe-f/T + a,,T
= (v, + ao7) - aOTe-t/T (4.34)
Para obtener la trayectoria del cuerpo sustituimos ahora este resultado para la velocidad en la ec. (4.21)
x(t) = x. + 1: [(vo + aoT) - a , ~ e - ~ ’ / ~ ] dt ’
Nótese que (vo + a07) y (a,T) son constantes. Usando las ecs. (4.26) a (4.29) y (4.33) se encuentra que
x(t) = xO + j t ( v o + aOT)df’ - a,Te-t’/rdt’ O S :
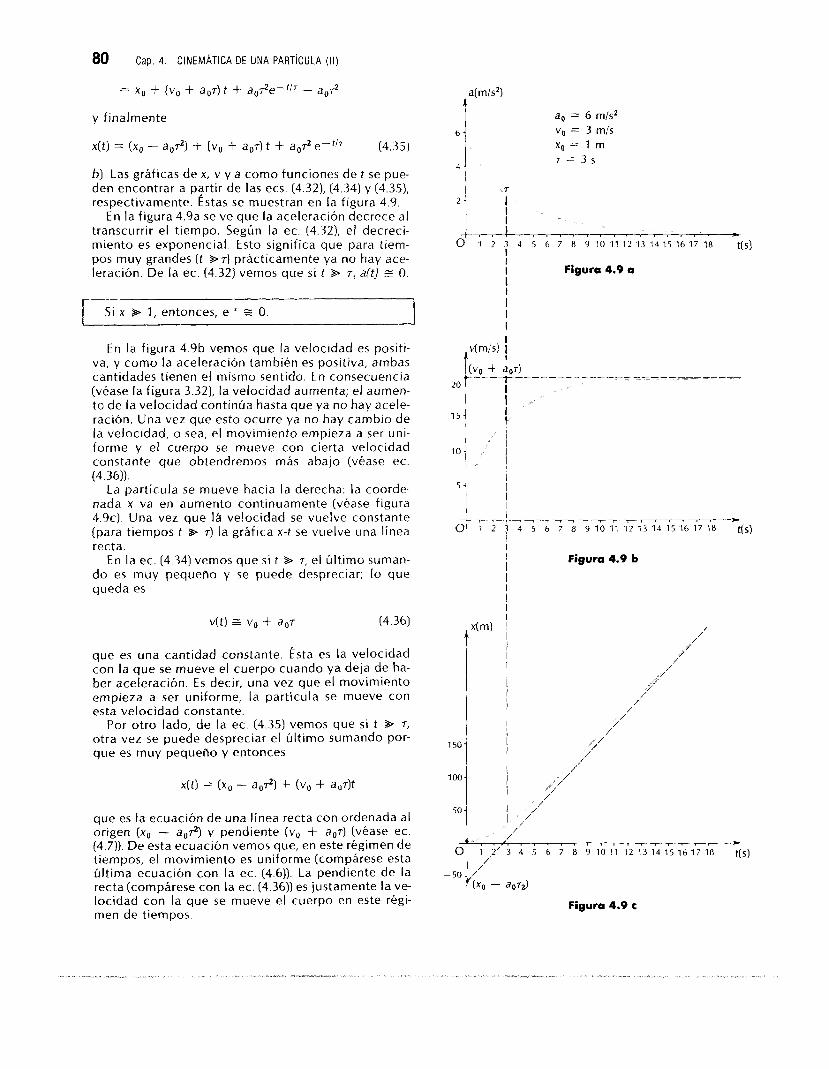
80 cap. 4. CINEMATICA DE UNA PART~CULA ( 1 1 )
= x, + (v, + aoT) t + aOT2e--t/7 - a,?
y finalmente
x(t) = (x, - a,?) + (vu + a,T) t + a,? e--t/7 (4.35)
b) Las gráficas de x, v y a como funciones de t se pue- den encontrar a partir de las ecs. (4.323, (4.34) y (4.35), respectivamente. Estas se muestran en la f igura 4.9.
En la f igura 4.9a se ve que la aceleración decrece al transcurrir el tiempo. Según la ec. (4.32), el decreci- miento es exponencial. Esto significa que para tiem- pos muy grandes (t %-T) prácticamente ya no hay ace- leración. De la ec. (4.32) vemos que s i t s T , a(t) = O.
S i x 1, entonces, e-x z O . 1 En la figura 4.9b vemos que la velocidad es positi-
va, y como la aceleración también es positiva, ambas cantidades tienen el mismo sentido. En consecuencia (véase la f igura 3.32), la velocidad aumenta; el aumen- to de la velocidad continúa hasta que ya no hay acele- ración. Una vez que esto ocurre ya no hay cambio de la velocidad, o sea, el movimiento empieza a ser uni- forme y el cuerpo se mueve con cierta velocidad constante que obtendremos más abajo (véase ec. (4.36)).
La partícula se mueve hacia la derecha: la coorde- nada x va en aumento continuamente (véase figura 4 . 9 ~ ) . Una vez que Ih velocidad se vuelve constante (para tiempos t B T) la gráfica x-t se vuelve una línea recta.
En la ec. (4.34) vemos que s i t S T , el ú l t imo suman- do es muy pequeño y se puede despreciar; lo que queda es
v(t) = v,, + aoT (4.36)
que es una cantidad constante. ÉSta es la velocidad con la que se mueve el cuerpo cuando ya deja de ha- ber aceleración. Es decir, una vez que el movimiento empieza a ser uniforme, la partícula se mueve con esta velocidad constante.
Por otro lado, de la ec. (4.35) vemos que s i t S T ,
otra vez se puede despreciar el último sumando por- que es muy pequeilo y entonces
x(t) = (x, - ao9) + (v, + a,dt que es la ecuación de una línea recta con ordenada al origen (x, - a,6) y pendiente (v, + a,T) (véase ec. (4.7)). De esta ecuación vemos que, en este régimen de tiempos, el movimiento es uniforme (compárese esta última ecuación con la ec. (4.6)). La pendiente de la recta (compárese con la ec. (4.36)) es justamente la ve- locidad con la que se mueve el cuerpo en este régi- men de tiempos.
Aa(rn/s2)
a, = 6 misZ
x o = I r n r = 3 s
6 - va = 3 m/s
4 .
7
'! I I I
I I I
Figura 4.9 a I
I I
I I
o' 1 2 3 4 5 6 7 8 9 10 11 12 13 1 4 1 5 1 6 1 7 18 t ( s )
-- I 3
I i I I I
I
I I
I
I I
a0 t I I 1
7) """""""""- """"
+ 4 5 6 7 8 9 10 11 12 13 14 15161718 t(s)
Figura 4.9 b
/'
/ /
0 + " - - m n ~ - s - v r 1 2' 3 4 5 6 7 8 9 10 11 12 13 14 15 1 6 1 7 18 * t(s)
Figura 4.9 c

MOVIMIENTO UNIFORMEMENTE ACELERADO 81
4.3. MOVIMIENTO UNIFORMEMENTE ACELERADO
Dedicaremos esta sección a estudiar con detalle un movimiento de mucha importancia: el uniformemen- te acelerado. Este movimiento es el que realiza una partícula que experimenta durante todo el i i -mpo la misma aceleración, es decir, una aceleración cunstan- te. Sea a esta aceleración, entonces
a(t) = a (4.371
que puede ser positiva o negativa. Obtendremos la ve- locidad instantánea para este movimiento. Sustitu- yendo (4.37) en la ec. (4.22) nos da
v(t) = vo + \ : a dt’
y usando las ecs. (4.26) a (4.29)
v(t) = vo + a l o f d t ’
= v , + a t ’ ( ;
a) 2En cuánto tiempo adquiere la velocidad de 72
b) i A qué distancia del punto de partida logra esta m/s?
velocidad?
En vista de que el cuerpo experimenta una acelera- ción e inicialmente está en reposo, sentirá un cam- bio de velocidad. Por tanto, se empieza a mover. Como se vio en el capítulo 3, en este caso la magnitud de la velocidad del cuerpo irá aumentando, ya que tanto la velocidad como la aceleración t ienen el mismo sen- tido. Llegará un momento en que el cuerpo tenga la velocidad de 72 mis.
Tomemos el eje X a lo largo de la línea en que ocu- rre el movimiento (fig. 4.10). Sea x. la posición del
= vo + a(t - O) cuerpo en el instante inicial t = O. En este instante la velocidad es vo = O, ya que el cuerpo parte del repo-
(4.38) so. Por consiguiente, para este caso las ecs. (4.38) y (4.39) quedan como
v(t) = vu + a t
Para encontrar la trayectoria, sustituimos esta últ i- ma expresión en la ec. (4.21)
V
x ( t ) = x. + [vo + a t ’ l d t ’ S1 v(t) = at (4.40)
~ ( t ) = x. + “ a r 2 I 2 (4.41)
y usando las ecs. (4.26) a (4.29), sucesivamente en- contramos a) Sea 7 el instante en que el cuerpo adquiere la velo-
cidad de 72 rn is . Como la ec. (4.40) es válida en todo x(t) = x. + !of vodt’ + at ‘ dt’ instante, será válida, en particular, en el instante t = r
= x. + vo :dt’ + a I t t ’ dt ’ O
v(7) = ar
1 = x. + vot’I ‘+ a Tt‘Z I De esta ecuación despejamos 7
O Véase apéndice I con P = ~(71, a = a, u = 7
= x. + vo(t - O) + ”a ( t2 - 02] 1 2
7 = .__ v( 7) a 1
2
(4.42) x(t) = x. + vot + ” a t 2 (4.39)
y sustituyendo valores obtenemos
La ec. (4.39) nos indica que, en un movimiento uni- formemente acelerado, la distancia que ,recorre un cuerpo va como el cuadrado del tiempo. Esta es una característica del movimiento uniformemente acele- rado.
72 r n i s - 72 m X s2 3.2 mis2 3.2 S X m 7 = “
= 22.5 S
Ejercicio 4.7. Un cuerpo se mueve a lo largo de una Aquí se usó la ec. (3.43) línea recta horizontal, hacia la derecha, con una ace- leración constante e igual a 3.2 m/s2. S i el cuerpo par- b] La posición del cuerpo en el instante res, según la te del reposo, ec. (4.41),

82 Cap. 4. CINEMÁTICA DE UNA PART~CULA ( 1 1 )
1 2
~ ( 7 ) = x 0 + - a 9 (4.43) 1 x(7) = x" + -a72 2
La distancia d recorrida por el cuerpo es (véase la f igu- ra 4.10)
De esta ecuación se tiene que (véase fig. 4.11)
1 = x(7) - x" = "a? 1 2 (4.47)
Sustituyendo valores
1 m d = "3.2 __ 2 52
X (22.5 S)'
x S 2
d = 810m
siendo L la longitud del cañón. Las ecuaciones (4.46) y (4.47) son dos ecuaciones con dos incógnitas: 7 y a. Re- solveremos estas ecuaciones en forma simultánea. Para ello despejamos a de la ec. (4.46)
Véase apéndice I con P = v(7), a = 7, u = a
v( 7) a = __ 7
y sustituimos esta expresión en la ec. (4.47)
(4.48)
Ejercicio 4.8. Una bala de fusil parte del reposo y sale del cañón con una velocidad de 800 mis. La longi- 1 = 1 v(7) 72 = - tud del cañón es de 1.5 m y la aceleración producida 2 7 por los gases de la pólvora sobre la bala es constante.
De aquí despejamos 7
1 v(717
a] )Cuánto t iempo tarda el proyecti l en recorrer el ca-
bj ¿Qué valor tiene la aceleracihn? rión? 1 Véase apéndice I con P = L, a = - 2 ~ ( 7 ) y U = 7
I-
Figura 4.1 1
Y " x(t) = x0 + -at2 I
3 (4.45)
Sean ahora: 7 el instante en que la bala sale del ca- ñón, x(7) la coordenada del extremo del cañón y ~ ( 7 ) la velocidad con la que sale la bala. Se tiene entonces, de la ec. (4.44)
v(7) = + 800 m/s = a7 (4.46)
y de la ec. (4.45)
Sustituyendo valores, nos da
2 x 1 . 5 m - 2 X i . 5 m X S 7 = 800 mis 800 m
-
800 mis - 800 m a = 3.75 X 1 0 - 3 s 3.75 s x s - ~ X 103 ~
= 213 X 1 0 3 4 ~ 2
= 2.13 X I O 5 m/s2

MOVIMIENTO UNIFORMEMENTE ACELERADO 83
Los frenos generan una aceleración opuesta a la ve- locidad. Por tanto, la velocidad del auto disminuirá (véase fig. 3.33). En vista de que la aceleración se apli- ca todo el tiempo, la velocidad disminuye hasta llegar al valor cero, en que el auto se detiene.
Escojamos el eje X a lo largo de la línea en que se mueve el auto, con sentido positivo en el mismo senti- do de la velocidad del auto (f ig. 4.12). Sea t = O el ins-
tante en que se empiezan a aplicar los frenos. Esco- gemos el origen del sistema de coordenadas en el pun- to en que se encuentra el auto en el instante t = O. La aceleración tiene sentido hacia la izquierda, por lo que en el sistema de coordenadas escogido es negati- va. Se tiene entonces que
Las ecs. (4.38) y (4.39) quedan en este caso como
v(t) = vo - la It Y
(4.501
Sea 7 el tiempo que tarda el cuerpo en detenerse; además sean x(r) la coordenada del punto en que se detiene y v(7) (= O) la velocidad con la que se detiene. En el instante t = r las ecs. (4.50) y (4.51) son
a) De la ec. (4.52) despejamos r
( v o l = / a l 7 y por tanto,
que sustituyendo valores nos da
60 km/h - 60 km X h2 43 200 km/h2 43 200 h X k m
7 = -
= 1.39 x 10-3 = 1.39 x 10-3h h (4.54)
Ahora bien, como 1 h = 3 600 S = 3.6 X 103s
= 1.39 X 10-3 x 3.6 x 103s
= 5 s (4.55) = 1.39 X 3.6 X 10-3+3~
bl La distancia en que se detiene el auto es x(r) dada por la ec. (4.53). Sustituyendo los valores de I vol, l a I y T (véanse ecs. (4.49) y (4.54))
km x 1.39 x 10-3h - 1 X 43200 - k m h h2
1 X(T) = 60 -
x (1.39 x 1 O-3 h)2
= 8.34 :: IO-* km - 41 733 X km
= 8.34 X IO-* km - 4.17 x k m
= 4.1 7 X k m
Pero 1 km = I O 3 m, por lo que
x ( r )=4 .17 X lO- 'X IO3m = 4.17 X 1 0 m = 41.7m
E l auto se detiene en 5 S a una distancia de 41.7 m. En la figura 4.13 se muestran las gráficas de x, v y a como funciones de t para el auto. Estas gráficas co- rresponden a las e a . (4.50) y (4.51).
u l L ( 4 5 fl
Figura 4.13
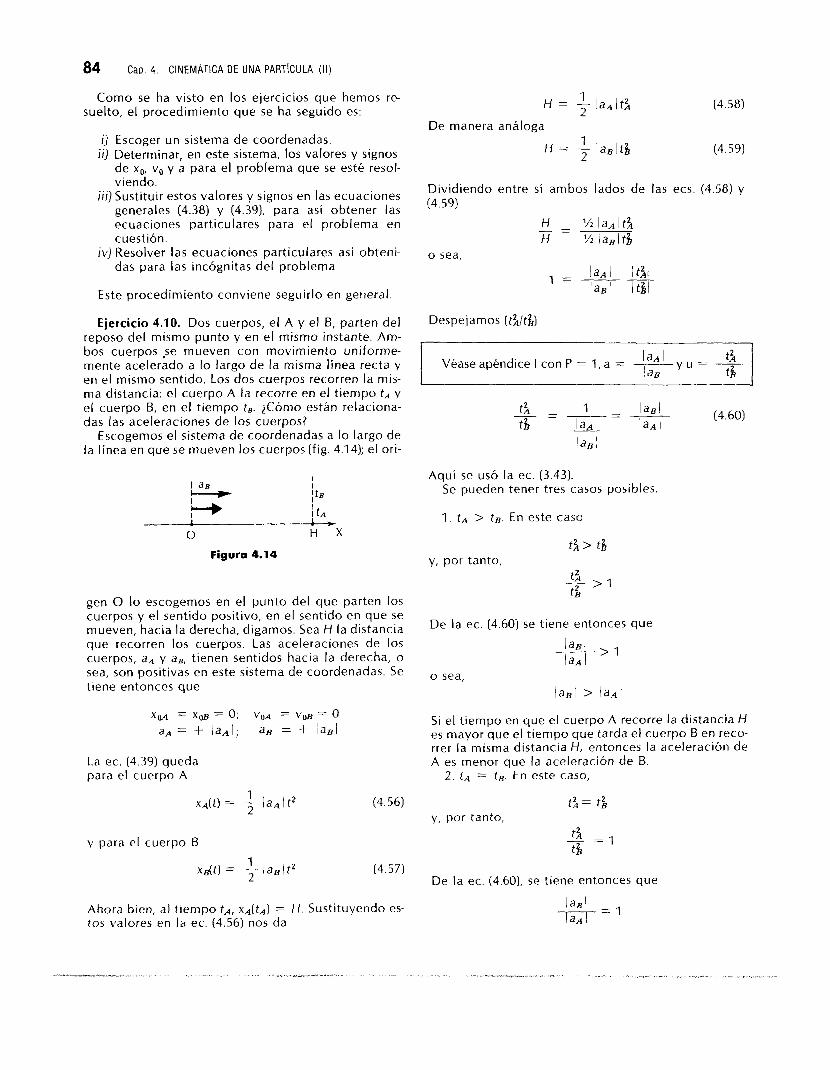
84 Cap. 4. CINEMÁTICA DE UNA PART~CULA ( 1 1 )
Como se ha visto en los ejercicios que hemos re- suelto, el procedimiento que se ha seguido es:
i) Escoger un sistema de coordenadas. i o Determinar, en este sistema, los valores y signos de x,,, vg y a para el problema que se esté resol- viendo.
iii] Sustituir estos valores y signos en las ecuaciones generales (4.38) y (4.39), para así obtener la3 ecuaciones particulares para el problema en cuestión.
iv) Resolver las ecuaciones particulares así obteni- das para las incógnitas del problema.
Este procedimiento conviene seguirlo en gerleral.
Ejercicio 4.10. Dos cuerpos, el A y el 5, parten del reposo del mismo punto y en el mismo instante. Am- bos cuerpos ,se mueven con movimiento uniforme- mente acelerado a lo largo de la misma línea recta y en el mismo sentido. Los dos cuerpos recorren la mis- ma distancia: el cuerpo A la recorre en el t iempo ta y el cuerpo B, en el t iempo tB. iCómo están relaciona- das las aceleraciones de los cuerpos?
Escogemos el sistema de coordenadas a lo largo de la línea en que se mueven los cuerpos (fig. 4.14); el ori-
Figura 4.14
gen O lo escogemos en el punto del que parten los cuerpos y el sentido positivo, en el sentido en que se mueven, hacia la derecha, digamos. Sea H la distancia que recorren los cuerpos. Las aceleraciones de los cuerpos, aa y ae, tienen sentidos hacia la derecha, o sea, son positivas en este sistema de coordenadas. Se tiene entonces que
XM = X @ = o; V M = VgB = o aA = + laA l ; aE = + last
La ec. (4.39) queda para el cuerpo A
y para el cuerpo 6
Ahora bien, al tiempo tA, XA(tA) = H. Sustituyendo es- tos valores en la ec. (4.56) nos da
1 H = 7 la41tA (4.58)
De manera análoga
H = - l a B l t i 1 2 (4.59)
Dividiendo entre sí ambos lados de las ecs. (4.58) y (4.59)
o sea,
1 = - - laAl It21 laBl Itit
Despejamos ( d i t i )
la,l
Aquí se usó la ec. (3.43). Se pueden tener tres casos posibles.
1. tA > tB. En este casc
t3 > ti y, por tanto,
De la ec. (4.60) se tiene entonces que
o sea,
S i el t iempo en que el cuerpo A recorre la distancia H es mayor que el t iempo que tarda el cuerpo 5 en reco- rrer la misma distancia H , entonces la aceleración de A es menor que la aceleración de B.
2 . t A = tB. En este caso,
t i = t; y, por tanto,
LA - 2 -
tb - 1
De la ec. (4.60), se tiene entonces que
“=I la,!

o sea. l a A l = las1
Si los dos cuerpos tardan lo mismo en recorrer la mis- ma distancia, entonces sus aceleraciones son iguales.
3. t~ < tn. Este caso es el inverso del caso 1.
Estas conclusiones son ciertas s i ambos cuerpos parten del mismo punto y, además, del reposo.
Ejercicio 4.11. Un cuerpo que parte del reposo se mueve a lo largo de una linea recta horizontal con movimiento uniformemente acelerado, hacia la dere- cha y con aceleración de 3.3 m/s2. Calcule las distan- cias que recorrió el cuerpo en los instantes I S , 2 S , 3 S y 4 s.
Escojamos el sistema de coordenadas a lo largo de la línea en que se mueve el cuerpo (fig. 4.15). E l sentido
a __t
O A B C D * t = O t = I s ; = 2s; = 3 s t = i s x
Figura 4.15
positivo del eje X se escoge con el mismo sentido que el de la aceleración y el origen O, en el punto del que parte el cuerpo. Se tiene que
x. = o; vo = O; a = + l a I = + 3.3 m/s2
Sustituyendo estos valores en la ec. (4.391, nos da
(4.61)
La distancia recorrida en t = 1 S es
x(l S ) = - x 3.3 - x (1 SI2 1 m 2 S 2
1 2 S
- - " 3 . 3 X l T X S 2 m
= 1.65 m (4.621
Aquí se usó
m - x s 2 = m x - = m x l = m S2
S2 S2
La distancia recorrida en t = 2 S es
x(2 S ) = - x 3.3 7 x (2 $2 1 m 2 S
1 2 S
= "x 3.3 x 4 " T x S2 m
= 6.6 m
MOVIMIENTO UNIFORMEMENTE ACELERADO 85
De la misma forma
x(3 S ) = 14.85 m x(4 S ) = 26.4 m
Notamos que
x(2 S ) = 6.6 m = 4 X 1.65 m = 4 x(l S )
donde se usó la ec. (4.62). De la misma manera
x(3 S ) = 9 x(1 S )
Y x(4 S ) = 16 x(1 S)
Estos resultados nos dicen que
En un tiempo doble, el cuerpo recorrió una distan- cia 4 = Z2 veces mayor. En un t iempo triple, el cuerpo recorrió una distan- cia 9 = veces mayor. En un tiempo cuádruple, el cuerpo recorrió una dis- tancia 16 = 42veces mayor, etcétera.
Este ejercicio ilustra el hecho de que la distancia re- corrida va como el cuadrado del tiempo. Esto es una característica del movimiento uniformemente acele- rado.
Supóngase que una partícula se mueve con movi- miento uniformemente acelerado a lo largo de una lí- nea recta (fig. 4.16). La distancia recorrida por la partí- cula, en el tiempo t, es la longitud AB que es
d = ~ ( t ) - X O
y usando la ec. (4.39)
d = vot + " a t 2 I 2
La ec. (4.38) para la velocidad es
v(t) = vo + at
(4.63)
(4.38)
"O
Figura 4.16
A continuación eliminaremos el tiempo t entre estas dos ecuaciones. Para ello despejaremos t de (4.38) y el resultado lo sustituimos en la ec. (4.63). Para facil idad escribiremos v(t) = v. De (4.38) se tiene
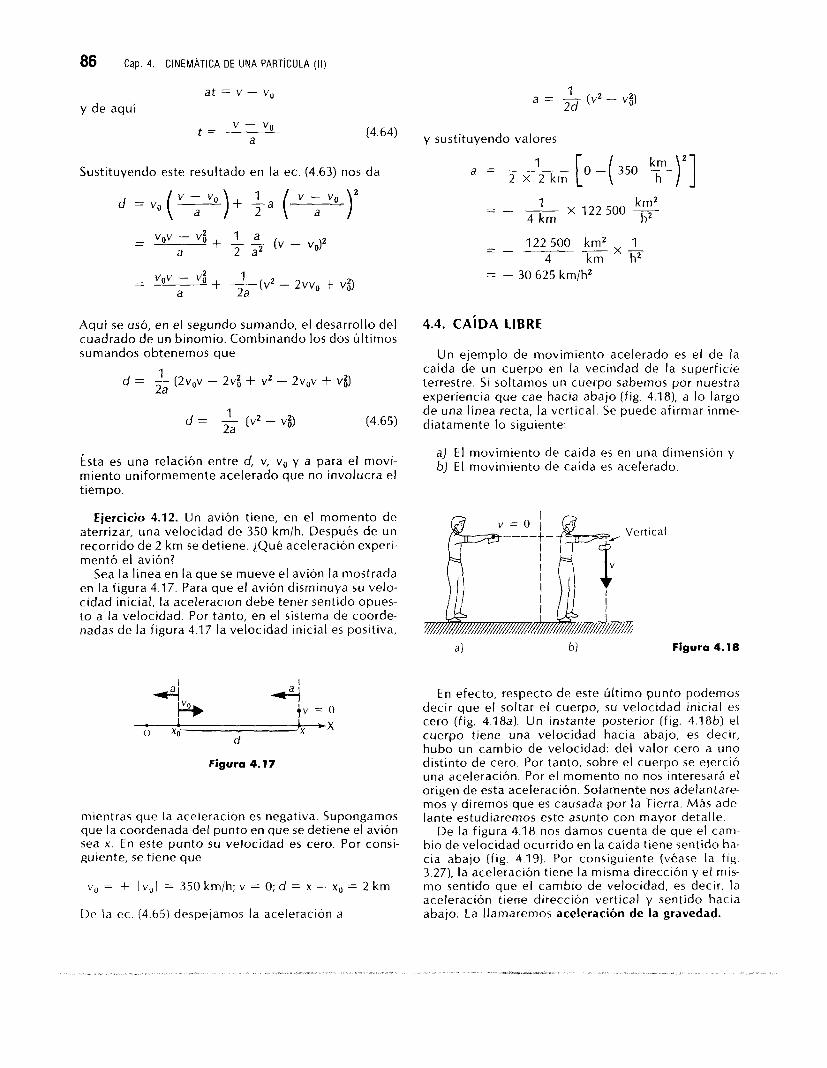
86 Cap. 4. CINEMÁTICA DE UNA PART~CULA ( 1 1 )
at = v - v" y de aquí
1 2d a = - (v2 - vi)
t = v - V"
a (4.64) y sustituyendo valores
Sustituyendo este resultado en la ec. (4.63) nos da
d =v. ( y)+ 1 ( 8 v-vvg a - )
- - V"V - va 1 + "(VZ - 2VV" + vi) a 2a
a = 2 x 2 k m [o -( 3.50
- X 1 2 2 500 - km2 " -
4 km h2
" - 122 500 km2 1 4 km 'hZ
= - 30 625 km/h2
Aquí se usó, en el segundo sumando, el desarrollo del 4.4. CAíDA LIBRE cuadrado de un binomio. Combinando los dos últimos sumandos obtenemos que Un ejemplo de movimiento acelerado es el de la
caída de un cuerpo en la vecindad de la superficie terrestre. S i soltamos un cuerpo sabemos por nuestra experiencia que cae hacia abajo (fig. 4.18), a lo largo
1 2a
d = - ( 2 ~ 0 ~ - 2 4 + v2 - 2 ~ 0 ~ + va)
1 de una línea recta, la vertical. Se puede afirmar inme- d = - [v* - v;) 2a (4.65) diatamente lo siguiente:
ÉSta es una relación entre d, v, vo y a para el movi- bl E l movimiento de caída es acelerado, miento uniformemente acelerado que no involucra el
a) E l movimiento de caída es en una dimensión y
t iempo
Ejercicio 4.12. Un avión tiene, en el momento de aterrizar, una velocidad de 350 km/h. Después de un recorrido de 2 k m se detiene. iQué aceleración experi- mentó el avión?
Sea la línea en la que se mueve el avión la mostrada en la figura 4.17. Para que el avión disminuya s u velo- cidad inicial, la aceleraclon debe tener sentido opues- to a la velocidad. Por tanto, en el sistema de coorde- nadas de la figura 4.17 la velocidad inicial es positiva,
I 4
t+ +v = o o Xd
4 +x d
Figura 4.17
mientras que la aceleracion es negativa. Supongamos que la coordenada del punto en que se detiene el avión sea x. En este punto s u velocidad es cero. Por consi- guiente, se tiene que
v,, = + l v g / = 350 km/h;v = O; d = x - x" = 2 k m
De Id ec. (4.65) despejamos la aceleración a
Figura 4.18
En efecto, respecto de este último punto podemos decir que el soltar el cuerpo, su velocidad inicial es cero (fig. 4.18a). Un instante posterior [fig. 4.186) el cuerpo tiene una velocidad hacia abajo, es decir, hubo un cambio de velocidad: del valor cero a uno distinto de cero. Por tanto, sobre el cuerpo se ejerció una aceleración. Por el momento no nos interesará el origen de esta aceleración. Solamente nos adelantare- mos y diremos que es causada por la Tierra. M á s ade- lante estudiaremos este asunto con mayor detalle.
De la figura 4.18 nos damos cuenta de que el cam- bio de velocidad ocurrido en la caída tiene sentido ha- cia abajo (fig. 4.19). Por consiguiente (véase la f ig. 3.27), la aceleración tiene la misma dirección y el mis- mo sentido que el cambio de velocidad, es decir, la aceleración tiene dirección vertical y sentido hacia abajo. La llamaremos aceleración de la gravedad.
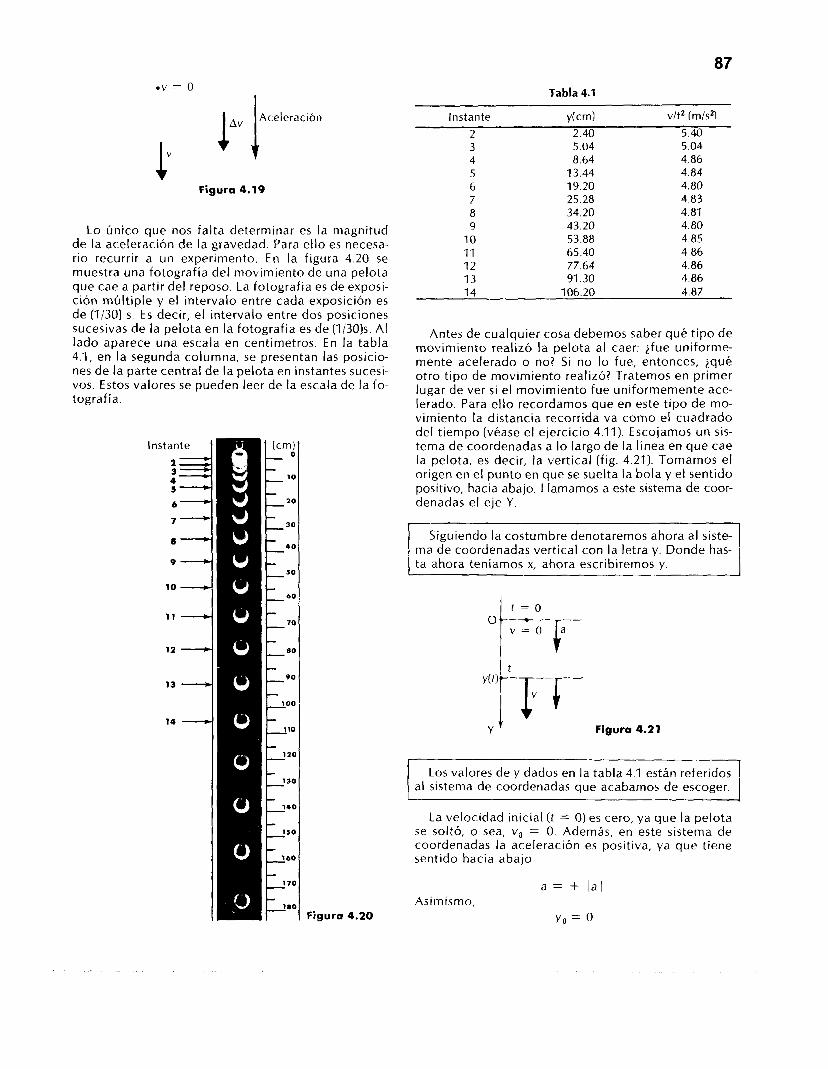
.V = o
* Figura 4.19
Lo Único que nos falta determinar es la magnitud de la aceleración de la gravedad. Para ello es necesa- rio recurrir a un experimento. En la figura 4.20 se muestra una fotografía del movimiento de una pelota que cae a partir del reposo. La fotografía es de exposi- c ión múlt ip le y el intervalo entre cada exposición es de (1/30) s. E s decir, el intervalo entre dos posiciones sucesivas de la pelota en la fotografía es de (1/30)s. A l lado aparece una escala en centímetros. En la tabla 4.1, en la segunda columna, se presentan las posicio- nes de la parte central de la pelota en instantes sucesi- vos. Estos valores se pueden leer de la escala de la fo- tografía.
Instar 1
4 3
5
6
7
8
9
10
1 1
12
13
14
Figura 4.20
87 Tabla 4.1
Instante y(cm) vlt2 [m/s*l 2 2.40 5.40 3 5 .O4 5.04 4 8.64 4.86 5 13.44 4.84 6 19.20 4.80 7 25.28 4.83 8 34.20 4.81 9 43.20 4.80
10 53.88 4.85 11 65.40 4.86 12 77.64 4.86 13 91.30 4.86 14 106.20 4.87
Antes de cualquier cosa debemos saber qué t ipo de movimiento realizó la pelota al caer: ifue uniforme- mente acelerado o no? Si no lo fue, entonces, i q u é otro tipo de movimiento realizó? Tratemos en primer lugar de ver si el movimiento fue uniformemente ace- lerado. Para ello recordamos que en este tipo de mo- vimiento la distancia recorrida va como el cuadrado del tiempo (véase el ejercicio 4.11). Escojamos u n sis- tema de coordenadas a lo largo de la línea en que cae la pelota, es decir, la vertical (fig. 4.21). Tomamos el origen en el punto en que se suelta la bola y el sentido positivo, hacia abajo. Llamamos a este sistema de coor- denadas el eje Y.
Siguiendo la costumbre denotaremos ahora al siste- ma de coordenadas vertical con la letra y. Donde has- ta ahora teníamos x, ahora escribiremos y .
t = 0 0 "-- F-
Y Figura 4.21
Los valores de y dados en la tabla 4.1 están referidos al sistema de coordenadas que acabamos de escoger.
La velocidad inicial (t = O) es cero, ya que la pelota se soltó, o sea, vo = O. Además, en este sistema de coordenadas la aceleración es positiva, ya que tiene sentido hacia abajo
a = + la1
Y o = 0
Asimismo,

88 Cap. 4. CINEMATICA DE UNA PARTICULA ( 1 1 )
Sustituyendo estos valores en la ec. (4.39) para el mo- vimiento uniformemente acelerado nos da
Dividiendo ambos lados de esta ecuación entre t2, ob- tenemos
(4.67)
Por tanto, s i en la caída libre la aceleración es cons- tante, entonces la combinación [y(t)/t2) en cada ins-
tante debe ser igual al mismo número [ = la I ] . S i
esto ocurre en efecto, de este número se puede enton- ces encontrar la aceleración a.
Se procederá, por tanto, a calcular la combinación [y(t)/t2] en cada uno de los instantes mostrados en la tabla 4.1. Por ejemplo, para el instante 4 el t iempo
1
transcurrido desde el inicio de la caída es 4 x 30 S = 1
0.1333 S = 1.33 X I O " S mientras que de la tabla ve- mos que la posición correspondiente es
y = 8.64 cm
Por tanto, 8.64 cm - v = 8.64 cm
t2 (1.33 X 10" S ) ~ 1.778 X s2 -
= 4.86 X 102cm/s2 = 4.86 mis2
De la misma manera se calculan los valores corres- pondientes a los otros instantes. Estos resultados se muestran en la tercera columna de la tabla 4.1. Nos damos cuenta de que estos valores son casi iguales. E l promedio de estos valores es 4.87 m/s2.
Los resultados de mediciones experimentales siem- pre contienen errores debidos a diversas causas. En nuestro caso éstas pueden ser: los instantes en que se enciende la luz para tomar la fotografía no están exactamente separados en (1/30)s, las marcas de la re- gla tienen ligeras variaciones, por lo que los valores de y no son precisos, etcétera.
De experimentos más predisos se encuentra que:
Los valores (y/t2) son cada vez más iguales entre s í al aumentar la precisión del experimento. E l valor promedio de (y/t2) es 4.90 mis2.
En conclusión, se puede decir que dentro de los erro- res experimentales, (y/t2) es efectivamente constante.
Esto significa que la distancia recorrida en la caída es proporcional al cuadrado del tiempo transcurrido. Es decir, el movimientc de caída es uniformemente ace- lerado. De la ec. (4.67) obtenemos entonces que la magnitud de la aceleración es
a = 2x = 2 X 4.90 m/s2 t 2
= 9.80 mis2
Denotaremos esta aceleración con la letra g
g = 9.80 mis2 (4.68)
Otra pregunta que nos podemos hacer es: i l a acele- ración de la gravedad es la misma para cuerpos distin- tos? E l valor (4.68) se obtuvo para la pelota de la figu- ra 4.20. Para responderla, haremos otro experimento. Se soltarán dos objetos distintos desde la misma altu- ra sobre el suelo y se verá s i caen la misma distancia en e l mismo tiempo o no. En la figura 4.22 se muestra una fotografía de la caída de dos cuerpos distintos a
F Ira 4.22
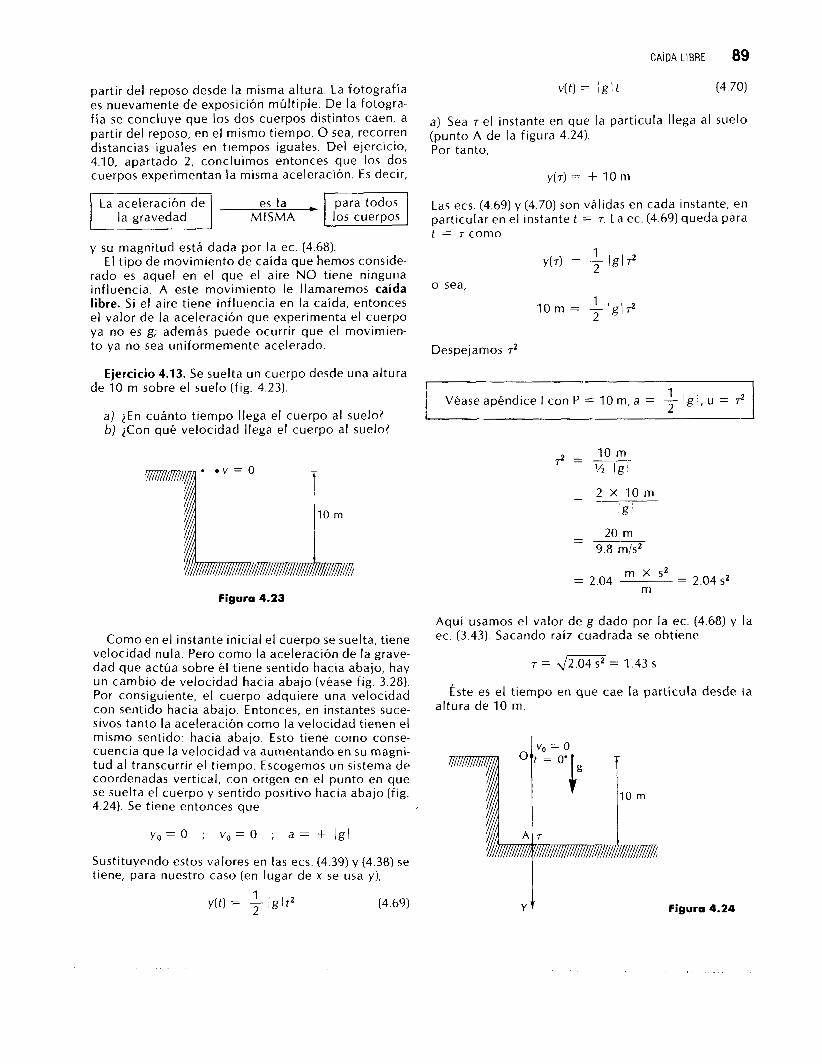
C A ~ D A L I B R E 89
partir del reposo desde la misma altura. La fotografía es nuevamente de exposición múltiple. De la fotogra- f i a se concluye que los dos cuerpos distintos caen, a partir del reposo, en el mismo tiempo. O sea, recorren distancias iguales en tiempos iguales. Del ejercicio, 4.10, apartado 2, concluimos entonces que los dos cuerpos experimentan la misma aceleración. E s decir,
M I SMA
y su magnitud está dada por la ec. (4.68). E l tipo de movimiento de caída que hemos conside-
rado es aquel en el que el aire NO tiene ninguna influencia. A este movimiento le llamaremos caída libre. Si el aire tiene influencia en la caída, entonces el valor de la aceleración que experimenta el cuerpo ya no es g; además puede ocurrir que el movimien- t o ya no sea uniformemente acelerado.
v(t) = / g / t (4.70)
a) Sea r el instante en que la partícula llega al suelo (punto A de la figura 4.24). Por tanto,
y(r) = + 10 m
Las ecs. (4.69) y (4.70) son válidas en cada instante, en Particular en el instante t = T. La ec. (4.69) queda para t = r como
1 Y(7) = - 2 lg172
o sea, 1 1 0 m = -1g172 2
Despejamos 72
Ejercicio 4.13. Se suelta un cuerpo desde una altura de 10 m sobre el suelo (fig. 4.23).
Véase apéndice I con P = 10 m, a = - lgl, u = 72 1 2 a) 2En cuánto t iempo l lega el cuerpo al suelo?
b) icon qué velocidad l lega el cuerpo al suelo?
72 - '/2 lgl 10 m
- - 2 X 1 0 m Igl
- 20 m - 9.8 m/s2
= 2.04 = 2.04 s2 m X s2
m Figura 4.23
Aquí usamos el valor de g dado por la ec. (4.68) y la Como en el instante inicial el cuerpo se suelta, tiene ec. (3.43). Sacando raíz cuadrada se obtiene
velocidad nula. Pero como la aceleración de la grave- dad que actúa sobre éI tiene sentido hacia abajo, hay un cambio de velocidad hacia abajo (véase fig. 3.28). Por consiguiente, el cuerpo adquiere una velocidad Éste es el t iempo en que cae la partícula desde la con sentido hacia abajo. Entonces, en instantes suce- altura de l o m. sivos tanto la aceleración como la velocidad t ienen el mismo sentido: hacia abajo. Esto tiene como conse- cuencia que la velocidad va aumentando en su magni- vg = o tud al transcurrir el tiempo. Escogemos un sistema de coordenadas vertical, con origen en el punto en que se suelta el cuerpo y sentido positivo hacia abajo (fig. ~ O'', = "'1. 4.24). Se tiene entonces que
r = d m = 1.43 S
y o = O ; v , = O ; a = + Igl
Sustituyendo estos valores en las ecs. (4.39) y (4.38) se tiene, para nuestro caso (en lugar de x se usa y) , I
(4.69) Y i Figura 4.24
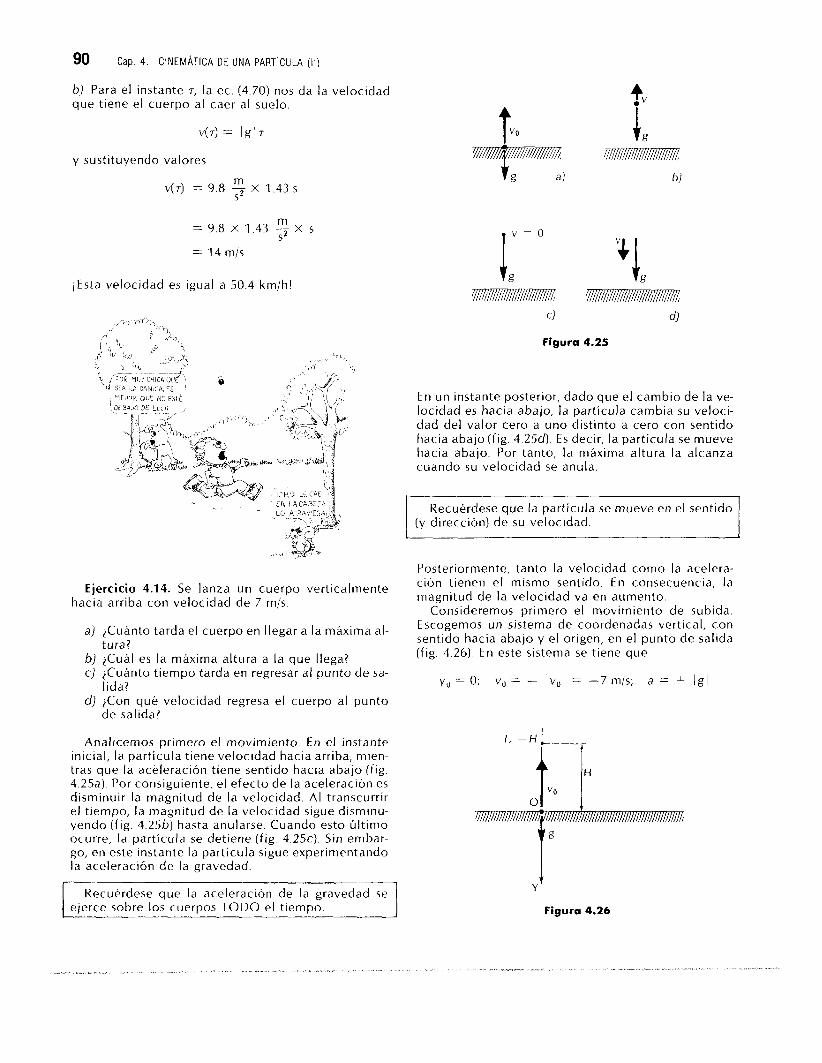
90 Cap. 4 . CINEMÁTICA DE UNA PARTíCULA ( 1 1 )
b] Para el instante r, la ec. (4.70) nos da la velocidad que tiene el cuerpo al caer al suelo.
v(7) = lgi7 +g
y sustituyendo valores 1-
m bl S2
4 7 ) = 9.8 - X 1.43 S
= 9.8 X 1 43 -- X S m S2
= 14 m/s
¡Esta velocidad es igual a 50.4 kmjh!
En un instante posterior, dado que el cambio de la ve- locidad es hacia abajo, la partícula cambia su veloci- dad del valor cero a uno distinto a cero con sentido hacia abajo (fig. 4.25d). Es decir, la partícula se mueve hacia abajo. Por tanto, la máxima altura la alcanza cuando su velocidad se anula.
Recuérdese que la partícula se mueve en el sentido (y dirección) de su velocidad.
Posteriormente. tanto la velocidad como la acelera- Ejercicio 4.14. Se lanza un cuerpo verticalmente ción tienen el mismo sentido. En consecuencia, la
magnitud de la velocidad va en aumento. Consideremos primero el movimiento de subida.
Escogemos un sistema de coordenadas vertical, con sentido hacia abajo y el origen, en el punto de salida (fig, 4.26). En este sistema se tiene que
hacia arriba con velocidad de 7 mis.
a) iCuánto tarda el cuerpo en llegar a la máxima al-
b] iCuál es la máxima altura a la que llega? tura?
c) ;Cuánto tiempo tarda en regresar al punto de sa-
d] icon qué velocidad regresa el cuerpo al punto l ida?
de salida?
yu = O; v,, = - I v u / = -7m/s; a = + Igl
Analicemos primero el movimiento. En el instante inicial, la partícula tiene velocidad hacia arriba, mien- tras que la aceleración tiene sentido hacia abajo (fig. 4.25a). Por consiguiente, el efecto de la aceleración es disminuir la magnitud de la velocidad. AI transcurrir el tiempo, la magnitud de la velocidad sigue disminu- yendo (fig. 4.25b) hasta anularse. Cuando esto último ocurre, la partícula se detiene (f ig. 4.25~). Sin embar- go, en este instante la partícula sigue experimentando la aceleración de la gravedad.
I Recuérdese que la aceleración de la gravedad se eierce sobre los cuerpos TODO el tiempo. I Y f
Figura 4.26
CA¡DA LIBRE 91
Con estos valores las ecs. (4.39) y (4.38) quedan como 1
Y ( t ) = - l v o l t + - l g l t 2 I
2 (4.71)
v(t) = - Ivol + Iglt (4.72)
a) Sea Te1 tiempo que tarda la partícula en l legar a la máxima altura. Como se vio, la máxima altura se logra cuando la velocidad de la partícula se anula, o sea,
v(T) = o
que usando la ec. (4.72),
v(T) = o = - l v u l + I g I T
Despejando la incógnita 7
/ vo l = Igl7
T = ~
I vuI lgl
Sustituyendo valores
7 mis - 7 m x s 2 T = "
9.80 mis2 9.8 m X S
= 0.71 S
Aquí se usó la ec. (3.43).
(4.73)
(4.74)
b] Sea H la altura sobre el suelo a la que llega la partí- cula. En el sistema de coordenadas escogido (véase fig. 4.26) se tiene entonces que
Y(7) = - IHI
y usando la ec. (4.71)
Y(T) = - /HI = - / v o 1 7 + - Igl72 1 2
Sustituyendo (4.73)
por lo que
I / j l M 2 Igl
(4.75)
Sustituyendo valores nos da
I H I = (7 mis)2 = 49 m2/s2 2 X 9.8 mis2 2 X 9.8 mis2
- - 49 m2 X s2 2 X 9.8 s2 X m
= 2.5 m
Aquí se volvió a usar la ec. (3.43). Concluimos que la partícula llega a 2.5 m encima del lugar del que fue lanzada y tarda 0.71 S en llegar.
Consideremos ahora el movimiento de bajada. To- memos como instante inicial para la bajada el instan- te en que la partícula está en su altura máxima (fig. 4.27). en el sistema de coordenadas escogido se tiene ahora
yU = - / H I = - 2.5m; vu = O; a = + ( g /
Y Figura 4.27
Sustituyendo estos valores en las ecs. (4.39) y (4.38), obtenemos las ecuaciones que describen la bajada
y ( t ) = - I H I + - l g / t2 1 2 (4.76)
v(t) = Iglt (4.77)
E l t iempo t que aparece en las ecs. (4.76) y (4.77) es contado a partir del instante en que la partícula se en- cuentra en su máxima altura. NO confundir con el t iempo t que aparece en las ecs. (4.71) y (4.72), que corre a partir del instante del lanzamiento.
c) Sea T el t iempo que tarda la partícula en ir de su máxima altura (punto A de la figura 4.27) al punto ini- cial (punto O). Es decir, en el instante r la partícula está en el origen O.
Y(?) = 0
Por tanto, de l a ec. (4.76)
y ( 7 ) = o = - /HI + - 1 g 1 7 2 1 2

92 Cap. 4 . CINEMÁTICA DE UNA PART~CULA ( 1 1 )
De aquí despejaremos 7
1 2 IH! = - Ig/72
V é a s e a p é n d i c e I c o n P = I H i , a = - - / g ! , u = 7 2 i.”Il
y sacando raíz cuadrada
T = JF- (4.78)
Sustituyendo los valores de I HI = 2.5 m obtenido arriba y el de / g /
= Jq= 7 mis
La magnitud de la velocidad al regreso es igual a la magnitud de la velocidad de salida. Sin embargo, es- tas velocidades no son iguales. A la salida, la veloci- dad tiene sentido hacia arriba y a la llegada tiene sen- tido hacia abajo (fig. 4.28).
T o I
2 X 2.5 m X s2 9.8 m
PROBLEMAS = JmT= 0.71 S
Aquí se usó la ec. (3.43). Comparando con la ec. (4.74) vemos que
T = 7
es decir, el t iempo de subida es el mismo que el de ba- jada.
d ) Ahora calcularemos la velocidad de la partícula en el momento en que regresa el punto O; esto es, ~ ( 7 ) . De l a ec. (4.77) se tiene que
v(r) = lg i r
Sustituyendo la expresión (4.78) para 7 nos da
= J r n (4.79)
Aquí se usó la ec. (1.27). Sustituyendo el valor de I H I = 2.5 m nos da
v(7) = 4 2 X 9.8 7 X 2.5 m m S
2 X 2.5 X 9.8 7 X m m S
Figura 4.28
4.1. Un cuerpo se mueve a lo largo de una línea recta con movimiento uniforme. S i su velocidad es de 53 km/h, iqué distancia recorre en 1 h, 2 h, 3 h?, jqué re- lación existe entre los valores que obtuvo? 4.2. Calcule el tiempo que tarda un rayo de luz en Ile- gar del Sol a la Tierra. La distancia es de 150 millones de kilómetros. Tome como valor de la velocidad de la luz 300 O00 kmis. 4.3. Un año luz es la distancia que recorre un rayo de luz en un año. Exprese esta distancia en km. 4.4. Un observador determina que transcurrió un in- tervalo de 4.5 s entre un relámpago y el trueno corres- pondiente. S i la luz y el sonido se mueven con veloci- dades uniformes, ja qué distancia del observador cayó el rayo? Tome la velocidad de la luz igual a 300 O00 kmls y la del sonido igual a 335 mls. 4.5. Dos carros (véase fig. 4.29), en movimiento uni- forme, el rojo y el negro, entran en una autopista a las 8 a.m. E l carro rojo entra en el punto A con una veloci- dad de 80 km/h. E l carro negro entra en el punto B, que está al este de A, a una distancia de 40 km. Si am- bos carros se encuentran en el punto C que está a 300 km al este de A,
300 km
40 km - A 6 C
Figura 4.29

PROBLEMAS 93
a) >Cuál es la velocidad del carro negro? b) i A qué hora se encuentran? c) Dibuje en una sola gráfica las gráficas x-t para
los dos carros.
4.6. Resuelva el problema 4.5 para el caso general en que el carro rojo t iene velocidad vR y el carro negro, vN(vR > vN). Suponga que la distancia entre A y B es d y que la distancia entre A y C es h. 4.7. Encuentre la trayectoria x(t) y la velocidad instan- tánea v(t) de un cuerpo que experimenta la acelera- ción a(t) dada por
a) a(t) = Rt b) a(t) = Rt + Lt4 c) a(t) = a,(l - e--t/7)
Aquí R, L, a, y r son cantidades constantes. En cada caso haga gráficas x - t, v - t y a - t para valores que us- ted asigne a las constantes. Describa los movimientos. 4.8. Compruebe los resultados que obtuvo en el pro- blema 4.7. 4.9. Verifique la congruencia dimensional de las ecs. (4.30) y (4.31). (>Qué dimensiones deben tener S y N?) 4.10. Verifique la congruencia dimensional de las ecs. (4.34) y (4.35). (2Qué dimensiones deben tener a, y r?). 4.11. Verifique la congruencia dimensional de los re- sultados obtenidos en el problema 4.7. (>Qué dimen- siones deben tener las cantidades constantes?) 4.12. Compruebe que la ec. (4.31) del ejercicio 4.4 es correcta. 4.13. Compruebe la congruencia dimensional de la ec. (4.65). 4.14. Resuelva el ejercicio 4.13 usando un sistema de coordenadas vertical, con el origen en el punto en que se suelta el cuerpo y con sentido positivo hacia arriba. >Se modifican los resultados? 4.15. Resuelva el ejercicio 4.14 con un sistema de coordenadas vertical, con el origen en el punto de má- xima altura y sentido hacia arriba. >Se modifican los resultados? 4.16. Un tren se mueve con una velocidad de 80 km/h. En cierto momento frena y se detiene en 1 5 s. Si e l movimiento es uniformemente acelerado, >qué acele- ración experimentó? >en qué distancia se detuvo? 4.17. En un tubo de televisión los electrones experi- mentan una aceleración constante de valor 3 X 1OI2 m/s2 >Qué velocidad alcanzan los electrones después de recorrer una distancia de 1 .5 cm, si parten del re- poso? 4.18. Un automovil ista circula por una calle a una ve- locidad de 40 km/h. Cuando está a 25 m de un crucero se enciende la luz amarilla del semáforo. La luz per- manece encendida durante 2 S y el ancho de la calle que va a cruzar es de I O m. S i acelera con aceleración constante de 7 mis2, >logrará cruzar antes de que se encienda la luz roja? 4.19. Un avión tiene una aceleración de 3.5 m/s2. Para elevarse tiene que alcanzar una velocidad de 350 km/h. Suponiendo que la aceleración es constante du- rante el despegue, >de qué longitud debe ser la pista?
4.20. Un tren parte de la estación A con una acelera- ción constante de 3.6 mis2. Después de haber viajado cierto tiempo, frena, con magnitud de la aceleración constante e igual a 0.22 mis2, deteniéndose en la esta- ción B. S i la distancia entre las dos estaciones es de 10 km, encuentre el t iempo que tardó el tren en ir de A a B. 4.21. Se suelta una piedra desde una altura de 130 m:
a) >Cuánto tiempo tarda en llegar al suelo? b) >Con qué velocidad llega al suelo? Exprese su re-
sultado en km/h.
4.22. Un cuerpo cae de un edificio en 7.2 s. 2Qué altu- ra tiene el edificio s i el cuerpo se soltó? 4.23. Un cuerpo cae l ibremente. AI pasar por el punto A tiene una velocidad de 14 mis y al llegar al punto B tiene la velocidad de 33 mis.
a) >Cuál es la distancia AB? b) >En cuánto tiempo recorre la distancia AB?
4.24. Desde una altura de 25 m se suelta una pelota. Después de 1.2 S se lanza hacia abajo otra pelota.
a) >Con qué velocidad se debe lanzar la segunda pelota para que llegue al suelo al mismo tiempo que la primera pelota?
b) icon qué velocidades l legan al suelo las dos pe- lotas?
4.25. Desde el borde de un acantilado se lanza una piedra verticalmente hacia arriba con una velocidad de 40 mis. La altura del acantilado sobre las playa es de 117 m.
a) iCuál es la máxima altura a la que llega la
b) 2Cuánto tiempo tarda en llegar a la máxima altu-
c) 2Cuánto tarda en llegar a la playa? d) >Con qué velocidad llega a la playa? e) i A dónde se encuentra la piedra 6 S después de
f) Haga las gráficas x - t, v - t y a - t del movimiento
piedra?
ra?
haber sido lanzada?
de la piedra
4.26. Se lanza un cuerpo hacia abajo con una veloci- dad de 5.3 mis desde una altura de 50 m sobreyl suelo.
a) 2Cuánto tiempo tarda en llegar al suelo? b) >Con qué velocidad llega?
4.27. Se lanza una piedra verticalmente hacia arriba con una velocidad de 12.5 mis. AI mismo tiempo, des- de una altura de 23 m se lanza una pelota hacia abajo con la velocidad de 19.9 mis.
a) iCuándo y dónde se encontrarán la piedra y la pelota?
94 Cap. 4. CINEMATICA DE UNA PARTÍCULA ( 1 1 )
b) iQué velocidades tienen en el instante de en-
c] En la misma gráfica dibuje las curvas x - t de am- cuentro?
bos cuerpos.
4.28. Desde el reposo se lanza un cohete verticalmen- te hacia arriba con aceleración neta constante e igual a 16.3 mis2. Después de 45 S se apaga el motor. Supon- ga que la atmósfera no tiene ningún efecto.
a) iQué velocidad t iene el cohete cuando se apaga
b) i A qué altura está el cohete cuando se apaga el
c) iHasta qué altura máxima l lega el cohete? d) iCuánto tiempo tarda en llegar a su máxima altu-
e) iCuánto tarda el cohete en regresar a la Tierra? f] i con qué ve loc idad regresa a la Tierra? g] Dibuje las gráficas x - t, v - t y a - t del cohete. Dis-
el motor?
motor?
r a?
cuta el movimiento.
4.29. Un cuerpo cae, a partir del reposo, desde una al- tura de 31 m sobre una superficie que no es rígida, causando en ella una depresión de 32.5 cm. Suponga que desde el momento de contacto el cuerpo es frena- do con aceleración constante.
a) iCuá1 es el valor de la aceleración con que es fre-
b) iEn cuánto t iempo se detuvo el cuerpo? nado el cuerpo?
4.30. icon qué velocidad hay que lanzar una pelota hacia arriba para que llegue a una altura de 35 m ? iCuánto t iempo tarda en l legar? 4.31. Un paracaidista cae desde el reposo desde una altura de 180 m. Después de 3 S se abre el paracaídas, que hace que el hombre sea frenado con una acelera- ción constante de 2.8 m/s2.
a) i A qué altura se abrió el paracaídas? b) >Qué velocidad tenía cuando se abrió el para-
cj iCuánto tiempo tarda en llegar al suelo? dl icon qué velocidad l lega al suelo?
caídas?
4.32 Se lanza un cuerpo verticalmente hacia arriba con cierta velocidad. Demuestre en general que
a) E l tiempo de subida hasta la altura máxima es igual al que tarda en l legar del punto de altura máxima al punto inicial.
b) La magnitud de la velocidad con que regresa el cuerpo al punto inicial es la misma que la magni- tud de la velocidad con que se lanzó el cuerpo.
5 Cinerndltica de una pat-ticula. D o s d i m e n s i o n e s
5.1. PRINCIPIO DE SUPERPOSICI~N DE EFECTOS
Siguiendo el planteamiento propuesto al inicio del capítulo 3, una vez que ya aprendimos la forma de describir el movimiento de una partícula en una di- mensión, estudiaremos ahora un movimiento más complicado: el movimiento de una partícula en dos dimensiones, es decir, en un plano. Como se men- cionó allá, la idea es poder usar, en la descripción del movimiento en dos dimensiones, lo aprendido para el caso de una dimensión. Esto significa poder contestar la siguiente pregunta: jse puede considerar el movi- miento en dos dimensiones como alguna combina-. ción de movimientos en una dimensión?
S i la respuesta es negativa, entonces hay que inves- tigar cómo describir directamente un movimiento en dos dimensiones.
S i la respuesta es positiva, entonces surge otra pre- gunta: >de qué tipo es la combinación?
La respuesta sólo nos la dará la Naturaleza. Para el lo se puede hacer el experimento que se muestra en la figura 5.1. Aquí se tienen dos cuerpos a la misma al- tura sobre el suelo. Uno de ellos, el A, simplemente se suelta. E l otro cuerpo, el B, se lanza con una veloci- dad inicial horizontal. A ninguno de los dos cuerpos se le imparte una velocidad vertical. La única diferen- cia entre los dos cuerpos es que el cuerpo B tiene una velocidad horizontal. Naturalmente que ambos cuer- pos experimentan la aceleración de la gravedad, que tiene dirección vertical y sentido hacia abajo.
En la figura 5.2 se muestra una fotografía múltiple de los movimientos de los cuerpos A y B. E l intervalo entre dos posiciones sucesivas de los cuerpos es de (1/30)s. E l cuerpo A simplemente cae a lo largo de la vertical, mientras que el cuerpo B sigue la trayectoria mostrada.
De la fotografía nos damos cuenta de que la posi- ción vertical de ambos cuerpos es la misma en cada
Figura 5.1
Figura 5.2
95
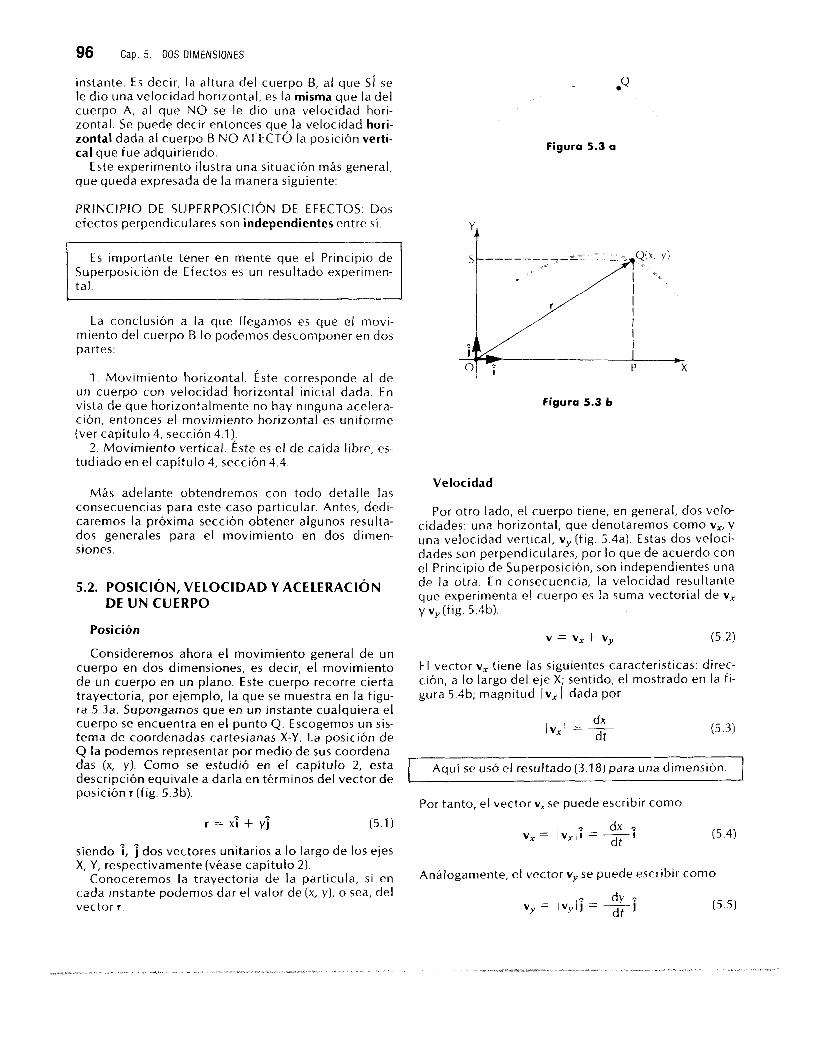
96 Cap. 5 DOS DIMENSIONES
instante. Es decir, la altura del cuerpo B, al que S í se le dio una velocidad horizontal, es la misma que la del cuerpo A, al que NO se le dio una velocidad hori- zontal. Se puede decir entonces que, la velocidad hori- zontal dada al cuerpo B NO AFECTO la posición vertí- cal que fue adquiriendo.
Este experimento ilustra una situación más general, que queda expresada de la manera siguiente:
PRINCIPIO DE SUPERPOSICIÓN DE EFECTOS: Dos efectos perpendiculares son independientes entre sí .
E s importante tener en mente que el Principio de Superposición de Efectos es un resultado experimen- tal.
La conclusión a la que llegamos es que el movi- miento del cuerpo B lo podemos descomponer en dos partes:
1. Movimiento horizontal. Éste corresponde al de un cuerpo con velocidad horizontal inicial dada. En vista de que horizontalmente no hay ninguna acelera- ción, entonces el movimiento horizontal es uniforme (ver capítulo 4, sección 4.1);
2 . Movimiento vert ical. Este es el de caída libre, es- tudiado en el capítulo 4, sección 4.4.
Más adelante obtendremos con todo detalle las consecuencias para este caso particular. Antes, dedi- caremos la próxima sección obtener algunos resulta- dos generales para el movimiento en dos dimen- siones.
5.2. POSICI~N, VELOCIDAD Y ACELERACI~N DE UN CUERPO
Posición
Consideremos ahora el movimiento general de un cuerpo en dos dimensiones, es decir, el movimiento de un cuerpo en un plano. Este cuerpo recorre cierta trayectoria, por ejemplo, la que se muestra en la figu- ra 5.3a. Supongamos que en un instante cualquiera el cuerpo se encuentra en el punto Q. Escogemos u n s is- tema de coordenadas cartesianas X-Y. La posición de Q la podemos representar por medio de sus coordena- das (x, y), Como se estudió en el capítulo 2, esta descripcion equivale a darla en términos del vector de posición r (fig. 5.3b).
r = d + y ' j (5.1 1
siendo ?, 'j dos vectores unitarios a lo largo de los ejes X, Y, respectivamente (véase capítulo 2).
Conoceremos la trayectoria de la partícula, si en cada instante podemos dar el valor de (x, y ) , o sea, del vector r .
Figura 5.3 a
Figura 5.3 b
Velocidad
Por otro lado, el cuerpo tiene, en general, dos velo- cidades: una horizontal, que denotaremos como v,, y una velocidad vertical, vy (fig. 5.4a). Estas dos veloci- dades son perpendiculares, por lo que de acuerdo con el Principio de Superposición, son independientes una de la otra. En consecuencia, la velocidad resultante que experimenta el cuerpo es la suma vectorial de v, y v,,(fig. 5.4b).
v = v,+ vy (5.2)
E l vector v, tiene las siguientes características: direc- ción, a lo largo del eje X; sentido, el mostrado en la fi- gura 5.4b; magnitud Iv, 1 dada por
dx dt lvxl = - (5.3j
I Aquí se usó el resultado (3.18) para una dimensión.
Por tanto, e l vector v, se puede escribir como
c dx c v, = lV, I l = - I (5.4) dt
Análogamente, el vector vy se puede escribir como
c dy f vy = l V y I J = __ dt ' (5.5)
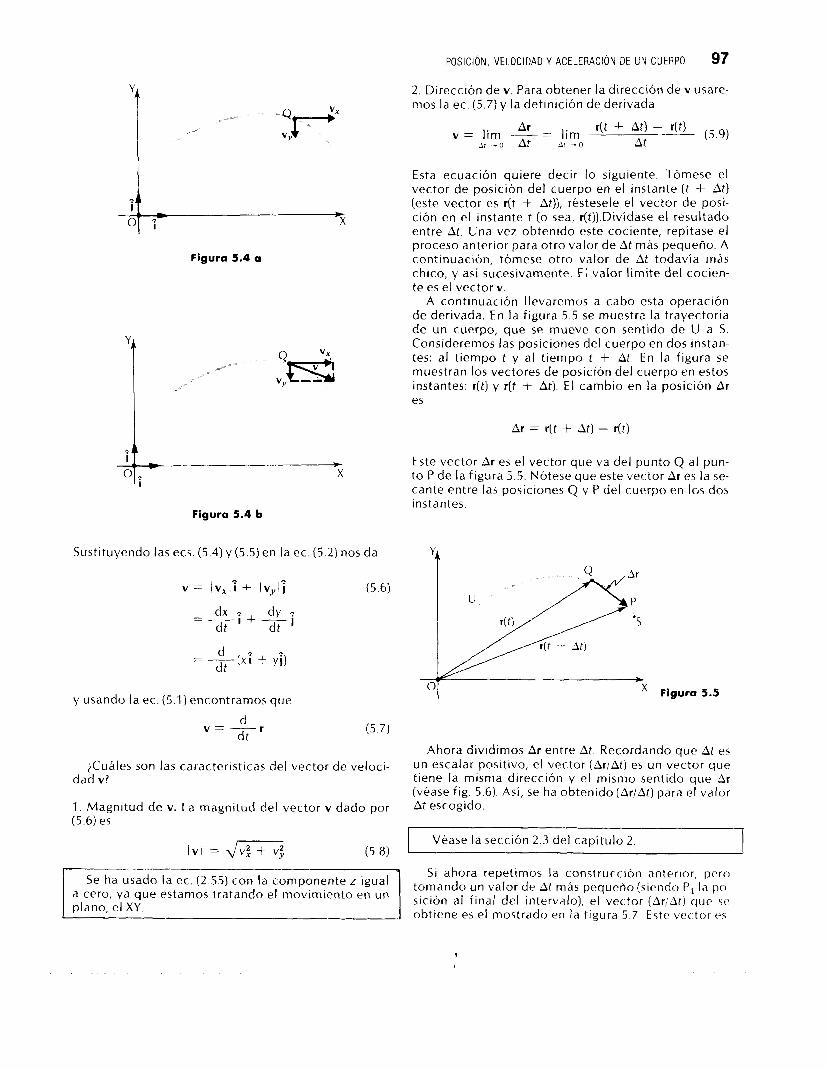
POSICION. VELOCIDAD Y ACELERACION DE UN CUERPO 97
I
Figura 5.4 a
2. Dirección de v. Para obtener la dirección de v usare- mos la ec. (5.7) y la definición de derivada
v = l im ___ Ar - - l im r(t + At) - r(t)
At (5.9) At -0 At At - O
Esta ecuación quiere decir lo siguiente. Tómese el vector de posición del cuerpo en el instante (t + At) (este vector es r(t + At)), réstesele el vector de posi- ción en el instante t ( o sea, r(t)).l)ivídase el resultado entre At. Una vez obtenido este cociente, repítase el proceso anterior para otro valor de At mas pequeño. A continuac,ión, tómese otro valor de At todavía más chico, y así sucesivamente. E ; valor límite del cocien- te es el vector v.
A continuación llevaremos a cabo esta operación de derivada. E n la figura 5.5 se muestra la trayectoria de un cuerpo, que se mueve con sentido de U a S. Consideremos las posiciones del cuerpo en dos instan- tes: al t iempo t y al tiempo t + At. En la figura se muestran los vectores de posición del cuerpo en estos instantes: r(t) y r(t + At). E l cambio en la posición Ar es
Q& v, "
Ar = r!t + At) - r(t)
Este vector Ar es el vector que va del punto Q al pun- to P de la figura 5.5. Nótese que este vector Ar es la se- cante entre las posiciones Q y P del cuerpo en los dos instantes.
* x
Figura 5.4 b
Sustituyendo las ecs. (5.4) y (5.5) en la ec. (5.2) nos da 7
- "
dx dy 3 dt d t
- - (x i + yj) d f i - dt
I + "
-
y usando la ec. (5.1) encontramos que
d dt
v = - r
Figura 5.5
Ahora dividirnos Ar entre At. Recordando que At es ¿Cuáles son las características del vector de veloci- un escalar positivo, el vector (AriAt) es un vector que
dad v? tiene la misma dirección y el mismo sentido que Ar (véase fig. 5.6). Así, se ha obtenido (Ar/At) para el valor
1. Magnitud de v. La magnitud del vector v dado por At escogido. (5.6) es
/ V I = J-; (5.8) Véase la sección 2.3 del capitulo 2
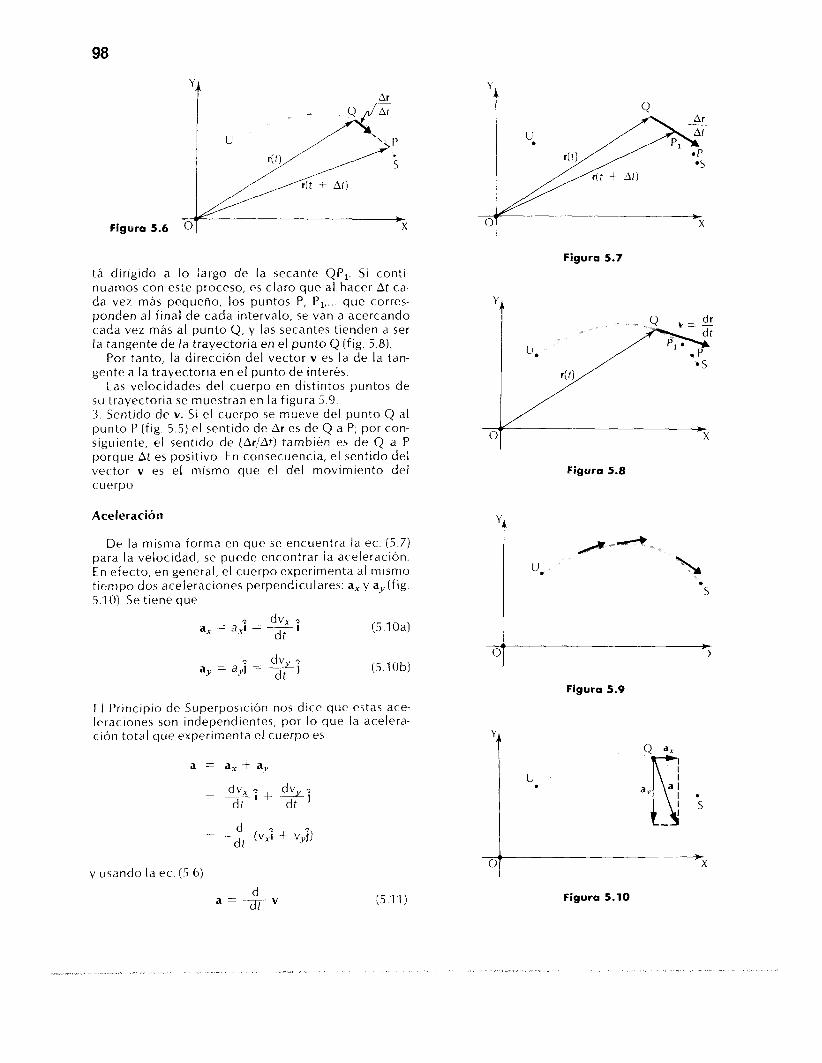
98
Y A
Figura 5.6
tá dirigido a lo iargo de la secante QP,. Si conti- nuamos con este proceso, es claro que al hacer At ca- da vez más pequeño, los puntos P, PI, ... que corres- ponden al final de cada intervalo, se van a acercando cada vez más al punto Q, y las secantes tienden a ser la tangente de la trayectoria en el punto Q (fig. 5.8).
Por tanto, la dirección del vector v es la de la tan- gente a la trayectoria en el punto de interés.
Las velocidades del cuerpo en distintos puntos de su trayectoria se muestran en la figura 5.9. 3. Sentido de v. Si el cuerpo se mueve del punto Q al punto P (fig. 5.5) el sentido de Ar es de Q a P; por con- siguiente, el sentido de (ArIAt) también es de Q a P porque At es positivo. En consecuencia, el sentido del vector v es el mismo que el del movimiento del cuerpo.
Aceleración
De la misma forma en que se encuentra la ec. (5.7) para la velocidad, se puede encontrar ¡a aceleración. En efecto, en general, el cuerpo experimenta al mismo tiempo dos aceleraciones perpendiculares: a, y a,(fig. 5.10) Se tiene que
(5.10a)
(5.10bl
E 1 Principio de Superposición nos dice que estas ace- leraciones son independientes, por lo que la acelera- cihn total que experimenta el cuerpo es
a = ax + ay
,. - -_ (vxi + V,j) " d -
dt
Figura 5.7
Figura 5.8
1 . U
Figura 5.9
. S
y usando la ec (S 6) d a = T V (5.11)
1 - O -X
Figura 5.10
. ~. - ..," -
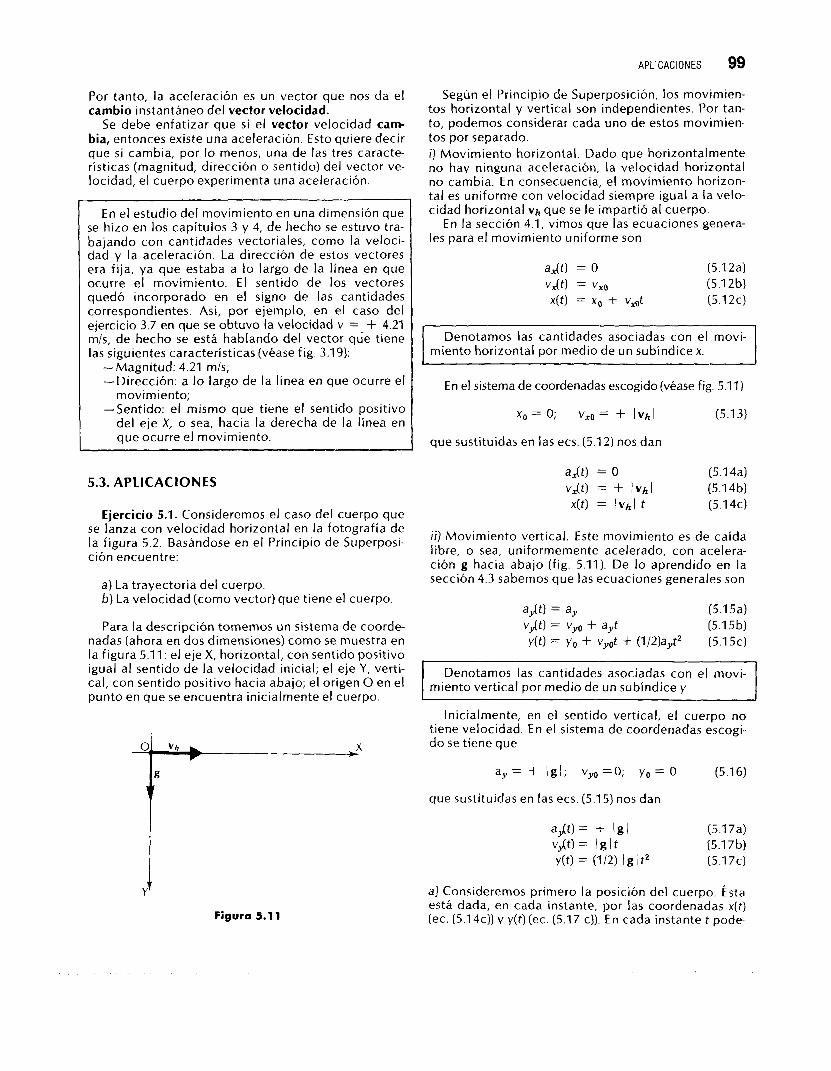
APLICACIONES 99
Por tanto, la aceleración es un vector que nos da el cambio instantáneo del vector velocidad.
Se debe enfatizar que s i el vector velocidad cam- bia, entonces existe una aceleración. Esto quiere decir que s i cambia, por lo menos, una de las tres caracte- rísticas (magnitud, dirección o sentido) del vector ve- locidad, el cuerpo experimenta una aceleración.
En el estudio del movimiento en una dimensión que se hizo en los capítulos 3 y 4, de hecho se estuvo tra- bajando con cantidades vectoriales, como la veloci- dad y la aceleración. La dirección de estos vectores era fija, ya que estaba a lo largo de la línea en que ocurre el movimiento. E l sentido de los vectores quedó incorporado en el signo de las cantidades correspondientes. Así, por ejemplo, en el caso del ejercicio 3.7 en que se obtuvo la velocidad v = + 4.21 m/s, de hecho se está hablando del vector qúe tiene las siguientes características (véase fig. 3.19):
-Magnitud: 4.21 m/s; -Dirección: a lo largo de la línea en que ocurre el
movimiento; -Sentido: el mismo que tiene el sentido positivo
del eje X, o sea, hacia la derecha de la línea en que ocurre el movimiento.
5.3. APLICACIONES
Eiercicio 5.1. Consideremos el caso del cuerpo que se lanza con velocidad horizontal en la fotografía.de la figura 5.2. Basándose en el Principio de Superposi- ción encuentre:
i i ) Movimiento vertical. Este movimiento es de caída libre, o sea, uniformemente acelerado, con acelera- ción g hacia abajo (fig. 5.11). De lo aprendido en la
a) La trayectoria del cuerpo. seccion 4.3 sabemos que las ecuaciones generales son
b) La velocidad (como vector) que tiene el cuerpo. aAt) = ay (5.1 5a)
Para la descripción tomemos un sistema de coorde- vJt) = vyo + a,t (5.1 5b) nadas (ahora en dos dimensiones) como se muestra en y ( t ) = yo + vyot + (1/2)ayt2 ( 5 . 1 5 ~ ) la figura 5.1 1 : el eje X, horizontal, con sentido positivo igual al sentido de la velocidad inicial; el eje Y, verti- Denotamos las asociadas con el movi- cal, con sentido positivo hacia abajo; el origen O en el m,ento vertical por medio de un subindice y punto en que se encuentra inicialmente el cuerpo.
Inicialmente, en el sentido vertical, e l cuerpo no tiene velocidad. En el sistema de coordenadas escogi-
0 vh x do se tiene que r
R ay = + lg l ; vyo =O; yo = 0 (5.16)
que sustituidas en las ecs. (5.1 5) nos dan
a,lt)= + lgl (5.17a) v&t)= Iglt (5.17b) y ( t ) = (1/2) I g I t 2 (5.1 7c)
Según el Principio de Superposición, los movimien- tos horizontal y vertical son independientes. Por tan- to, podemos considerar cada uno de estos movimien- tos por separado. i) Movimiento horizontal. Dado que horizontalmente no hay ninguna aceleración, la velocidad horizontal no cambia. En consecuencia, el movimiento horizon- tal es uniforme con velocidad siempre igual a la velo- cidad horizontal vh que se le impartió al cuerpo.
En la sección 4.1, vimos que las ecuaciones genera- les para el movimiento uniforme son
adt) = O (5.1 2a) vdt) = VXO (5 .I 2 b) x(t) = x 0 + v.& (5.1 2c)
Denotamos las cantidades asociadas con el movi- miento horizontal por medio de un subíndice x.
En el sistema de coordenadas escogido (véase fig. 5.11)
x0 = o; v,o = + IVh I (5.1 3 )
que sustituidas en las ecs. (5.12) nos dan
Figura 5.1 1
a) Consideremos primero la posición del cuerpo. Ésta está dada, en cada instante, por las coordenadas x(t) (ec. (5 .14~) ) y y([) (ec. (5.17 c)). En cada instante t pode-
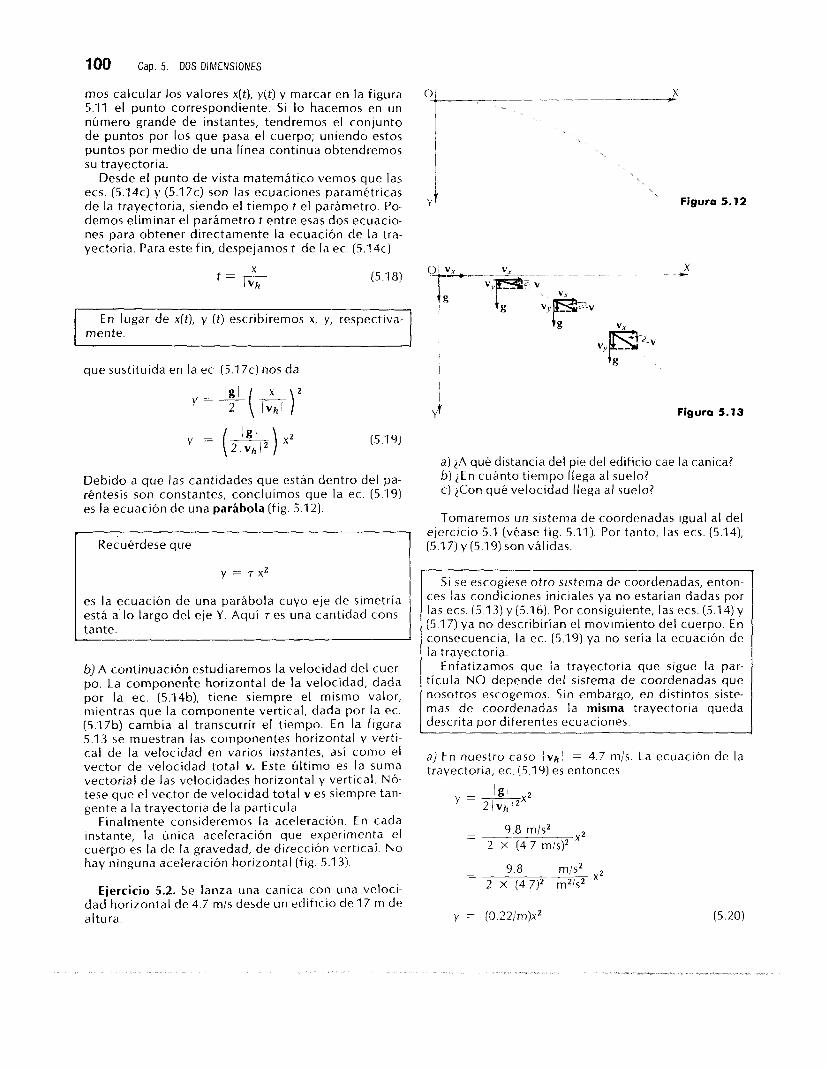
100 cap. 5. DOS DIMENSIONES
mos calcular los valores x ( t ) , y ( t ) y marcar en la figura 5.11 el punto correspondiente. S i lo hacemos en un número grande de instantes, tendremos el conjunto de puntos por los que pasa el cuerpo; uniendo estos puntos por medio de una línea continua obtendremos su trayectoria.
Desde el punto de vista matemático vemos que las ecs. ( 5 . 1 4 ~ ) y (5.1 7c) son las ecuaciones paramétricas de la trayectoria, siendo el tiempo t el parámetro. Po- demos eliminar el parámetro t entre esas dos ecuacio- nes para obtener directamente la ecuación de la tra- yectoria. Para este fin, despejamos t de la ec. (5.14~)
t = / V h X
(5.18)
r En lugar de x(t), y ( t ) escribiremos x, y, respectiva-
mente.
que sustituida en la ec. (5.1 7c) nos da
(5.19)
Debido a que las cantidades que están dentro del pa- réntesis son constantes, concluimos que la ec. (5.19) es la ecuación de una parábola (fig. 5.1 2).
Recuérdese que
i Y t Figura 5.12
Figura 5.13
a) >A qué distancia del pie del edificio cae la canica? b) )En cuánto tiempo líega al suelo? c) )Con qué velocidad llega al suelo?
Tomaremos un sistema de coordenadas igual al del ejercicio 5.1 (véase fig. 5.11). Por tanto, las ecs. (5.14), (5.1 7 ) y (5.1 9) son válidas.
y = 7 x 2 S i se escogiese otro sistema de coordenadas, enton-
ces las condiciones iniciales ya no estarían dadas por las ecs. (5.1 3) Y (5.16). Por consiguiente, las ecs. (5.14) Y (5.17) ya no describirían el movimiento del cuerpo. En consecuencia, la ec. (5.19) ya no sería la ecuación de
b) A continuación.estudiaremos la velocidad del cuer- po. La componente horizontal de la velocidad, dada por la ec. (5.14b), tiene siempre el mismo valor, mientras que la componente vertical, dada por la ec. (5.17b) cambia al transcurrir el tiempo. En la figura 5.13 se muestran las componentes horizontal y verti- cal de la velocidad en varios instantes, así como el vector de velocidad total v. Este úl t imo es la suma vectorial de las velocidades horizontal y vertical. Nó- tese que el vector de velocidad total v es siempre tan- gente a la trayectoria de la partícula.
Finalmente consideremos la aceleración. En cada instante, la unica aceleración que experimenta el cuerpo es la de la gravedad, de dirección vertical. No hay ninguna aceleración horizontal (fig. 5.1 31.
Ejercicio 5.2. Se lanza una canica con una veloci- dad horizontal de 4.7 m/s desde un edif icio de 17 m de altura.
, la trayectoria. Enfatizarnos que la trayectoria que sigue la par-
tícula NO depende del sistema de coordenadas que nosotros escogemos. Sin embargo, en distintos siste- mas de coordenadas la misma trayectoria queda descrita por diferentes ecuaciones.
a) t n nuestro caso / v h I = 4.7 mis. La ecuacion de la trayectoria, ec. (5.1 9) es entonces
y = 2 ) v h ; 2 l g !
X 2
y = (0.22/rn)x2 (5.20)
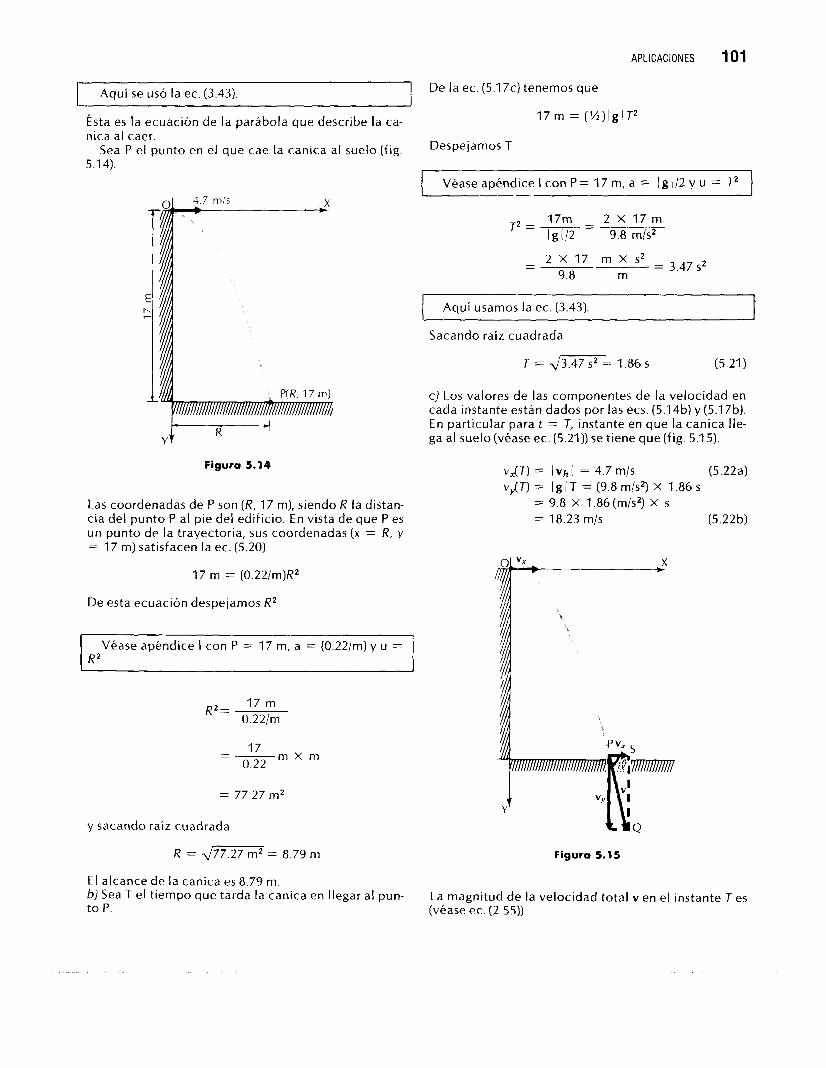
APLICACIONES 101
1 Aquí se usó la ec. (3.43). I De la ec. (5.17~) tenemos qL;e I I
ÉSta es la ecuación de la parábola que describe la ca- nica al caer.
Sea P el punto en el que cae la canica al suelo (f ig. DespejamosT 5.14). I Véase apéndice I con P = 17 m, a = l g / / 2 y u = T2 I
p=" 17m - 2 X 17 m lg l / 2 9.8 m/sZ
- - 2 x 1 7 m X s 2 9.8 m
= 3.47 S 2
Aquí usamos la ec. (3.43).
Sacando raíz cuadrada
T = d m = 1.86 S (5.21)
c) Los valores de las componentes de la velocidad en cada instante están dados por las ecs. (5.1 4b) y (5.1 7b). En particular para t = T, instante en que la canica Ile- ga al suelo (véase ec. (5.21)) se tiene que (fig. 5.1 5).
Figura 5.14 VAT) = lvhl = 4.7 m/s (5.22a) VJT) = Ig 1 T = (9.8 m/s2) X 1.86 S
Las coordenadas de P son (R, 17 m), siendo R la distan- = 9.8 X 1.86(m/s2) X S cia del punto P al pie del edificio. En vista de que P es = 18.23 mis (5.22b) un punto de la trayectoria, sus coordenadas (x = R, y = 17 m) satisfacen la ec. (5.20)
X 17 m = (0.22/m)R2
De esta ecuación despejamos R2
Véase apéndice I con P = 1 7 m, a = (0.22/m) y u = R2
17 m 0.22/m
R2'
- -~ 0.22
= 77.27 m 2
l7 m x m
y sacando raíz cuadrada
R = d m = 8.79m Figura 5.15
E l alcance de la canica es 8.79 m. bl Sea T el tiempo que tarda la canica en llegar al pun- La magnitud de la velocidad total v en el instante T es to P. (véase ec. (2.55))
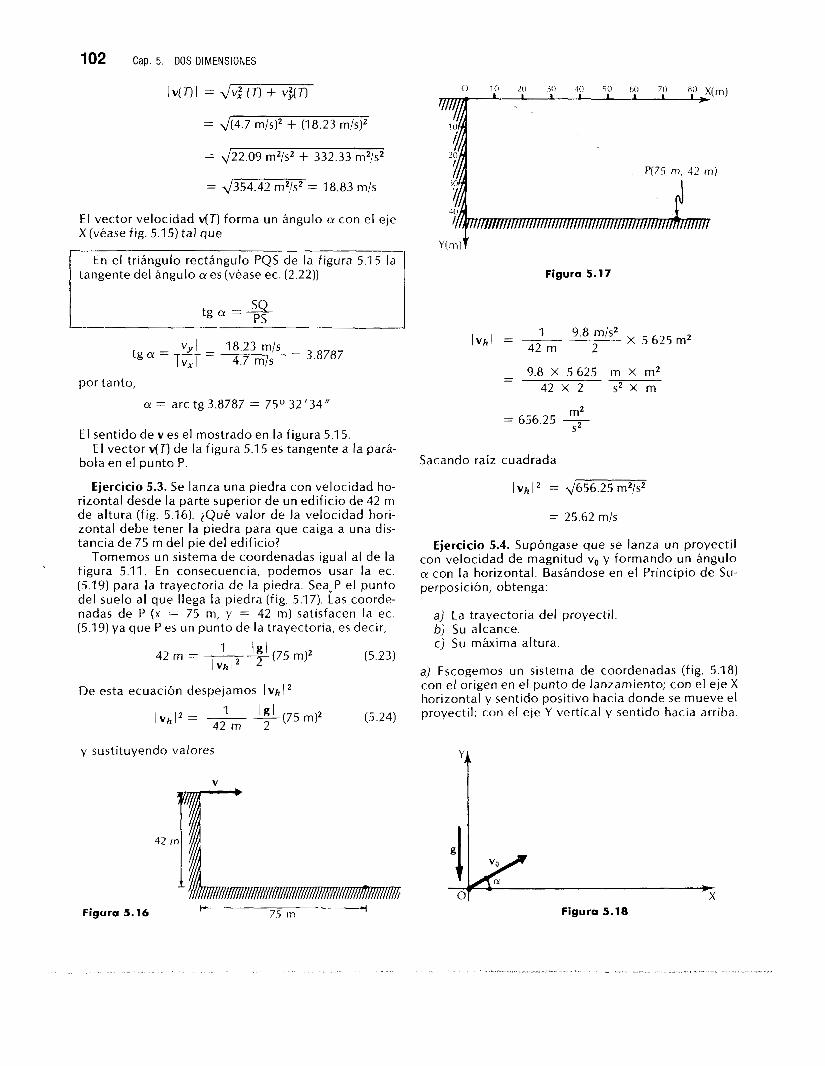
102 Cap. 5. DOS DIMENSIONES
Iv(T)I = Jv: ( T ) + v p - l
= J(4.7 + (18.23
= J22.09 m2/s2 + 332.33 m2/s2
= d354.42 m2/s2 = 18.83 mis P(75 m, 42 m)
E l vector velocidad v(T) forma un ángulo CY con el eje X (véase fig. 5.1 5) ta l que
En el tr iángulo rectángulo PQS de la figura 5.15 la tangente del ángulo (Y es (véase ec. (2.22)) Figura 5.17
t g (Y = SQ PS
por tanto,
CY = arc tg 3.8787 = 75O 32 '34"
E l sentido de v es el mostrado en la figura 5.1 5.
bola en el punto P. E l vector v(T) de la figura 5.15 es tangente a la pará-
Ejercicio 5.3. Se lanza una piedra con velocidad ho- rizontal desde la parte superior de un edificio de 42 m de altura (fig. 5.16). 2Qué valor de la velocidad hori- zontal debe tener la piedra para que caiga a una dis- tancia de 75 m del pie del edificio?
Tomemos un sistema de coordenadas igual al de la figura 5.11. En consecuencia, podemos usar la ec. (5.19) para la trayectoria de la piedra. Sea+P el punto del suelo al que llega la piedra (fig. 5.17). Las coorde- nadas de P (x = 75 m, y = 42 m) satisfacen la ec. (5.19) ya que P es un punto de la trayectoria, e5 decir,
De esta ecuación despejamos I V h 1
(5.23)
(5.24)
- - 9.8 X 5 625 m X m2 4 2 x 2 s 2 X m
656.25 - m2 S 2
Sacando raíz cuadrada
= 25.62 m/s
Ejercicio 5.4. Supóngase que se lanza un proyecti l con velocidad de magnitud vo y formando un ángulo (Y con la horizontal. Basándose en el Principio de Su- perposición, obtenga:
a] La trayectoria del proyectil b] Su alcance. c) Su máxima altura.
a) Escogemos un sistema de coordenadas (fig. 5.18) con el origen en el punto de lanzamiento; con el eje X horizontal y sentido positivo hacia donde se mueve el proyectil; con el eje Y vertical y sentido hacia arriba.
y sustituyendo valores
y?
Figura 5.16 t- 75 m
4 Figura 5.18
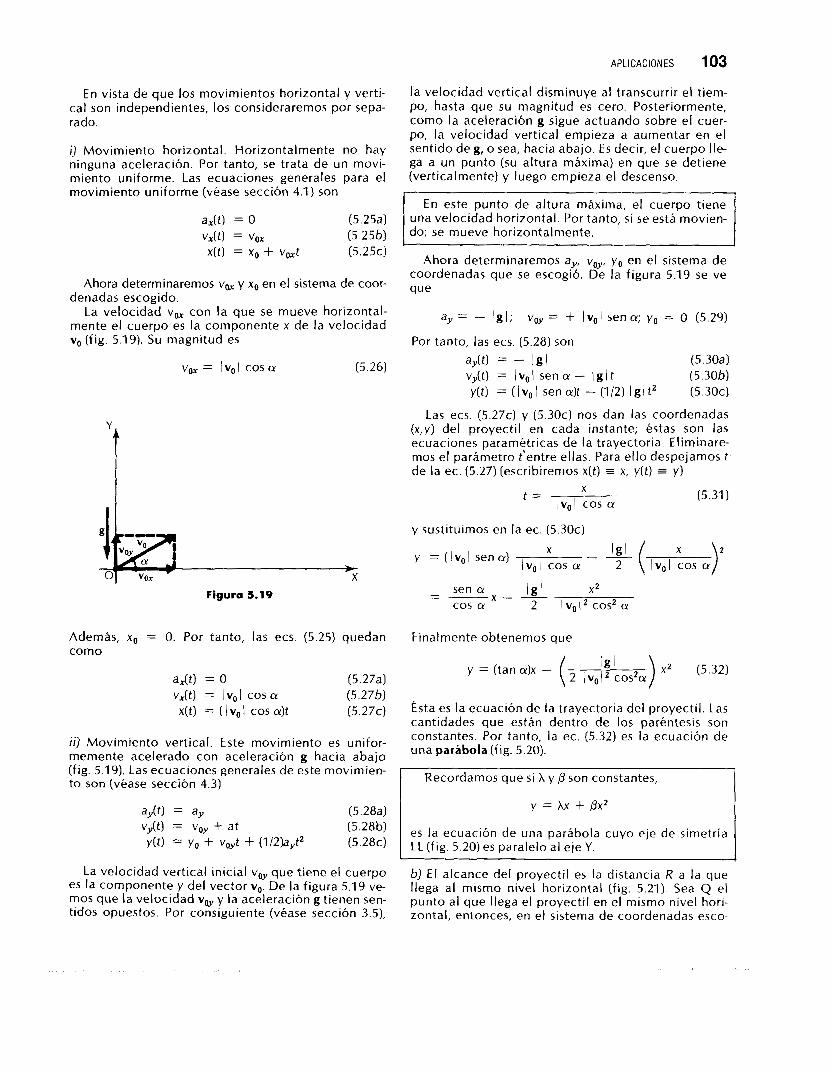
APLICACIONES 103
En vista de que los movimientos horizontal y verti- cal son independientes, los consideraremos por sepa- rado.
i] Movimiento horizontal. Horizontalmente no hay ninguna aceleración. Por tanto, se trata de un movi- miento uniforme. Las ecuaciones generales para el movimiento uniforme (véase sección 4.1) son
a d t ) = O (5.25a) vx(t) = v, (5.256) x(t) = x0 + v,t (5 .25~)
Ahora determinaremos v, y x. en el sistema de coor- denadas escogido.
La velocidad v, con la que se mueve horizontal- mente el cuerpo es la componente x de la velocidad vo (fig. 5.19). Su magnitud es
v, = / v o l c o s a (5.26)
Figura 5.19
ax(t) = O (5.27a) vdt) = Ivol cos a (5.27b) x(t) = ( I vo I cos a)t (5 .27~)
i i) Movimiento vertical. Este movimiento es unifor- memente acelerado con aceleración g hacia abajo (fig. 5.19). Las ecuaciones generales de este movimien- to son (véase sección 4.3)
ay(t) = ay (5.28a) vy(t) = voy + at (5.2813) ~ ( 0 = yo + voyt + (1/2)ayt2 (5 .28~)
La velocidad vertical inicial voy que tiene el cuerpo es la componente y del vector vo. De la figura 5.19 ve- mos que la velocidad voy y la aceleración g tienen sen- tidos opuestos. Por consiguiente (véase sección 3.5),
la velocidad vertical disminuye al transcurrir el tiem- po, hasta que su magnitud es cero. Posteriormente, como la aceleración g sigue actuando sobre el cuer- po, la velocidad vertical empieza a aumentar en el sentido de g, o sea, hacia abajo. Es decir, el cuerpo Ile- ga a un punto (su altura máxima) en que se detiene (verticalmente) y luego empieza el descenso.
En este punto de altura máxima, el cuerpo t iene una velocidad horizontal. Por tanto, sí se está movien- do; se mueve horizontalmente.
Ahora determinaremos ay, voy, yo en el sistema de coordenadas que se escogió. De la figura 5.19 se ve que
ay - l g / ; voy = + Ivol sena; yo = O (5.29)
Por tanto, las ecs. (5.28) son ay(d = - Igl (5 .30~~) vy(t) = (vo l sen (Y - Iglt (5.30b) ~ ( t ) = ( I vo I sen a)t - (I /2) I g I t2 (5 .30~)
Las ecs. (5 .27~) y (5 .30~) nos dan las coordenadas (x,y) del proyectil en cada instante; éstas son las ecuaciones paramétricas de la trayectoria. Eliminare- mos el parámetro t’entre ellas. Para ello despejamos t de la ec. (5.27) (escribiremos x(t) = x, y ( t ) = y)
t = X
lvol cos a (5.31)
y sustituimos en la ec. (5.30~)
Y = ( Ivo l sena) X X
/ v o l cos a - * ( IVOI cos .)’
Finalmente obtenemos que
y = (tan a)x - I g l ) X’ (5.32) 2 /vol2 COS2cY
Ésta es la ecuación de la trayectoria del proyectil. Las cantidades que están dentro de los paréntesis son constantes. Por tanto, la ec. (5.32) es la ecuación de una parábola (fig. 5.20).
Recordamos que s i X y p son constantes,
y = Ax + 0x2
es la ecuación de una parábola cuyo eje de simetría LL (fig. 5.20) es paralelo al eje Y.
b) E l alcance del proyectil es la distancia R a l a que llega al mismo nivel horizontal (fig. 5.21). Sea Q el punto al que llega el proyectil en el mismo nivel hori- zontal, entonces, en el sistema de coordenadas esco-
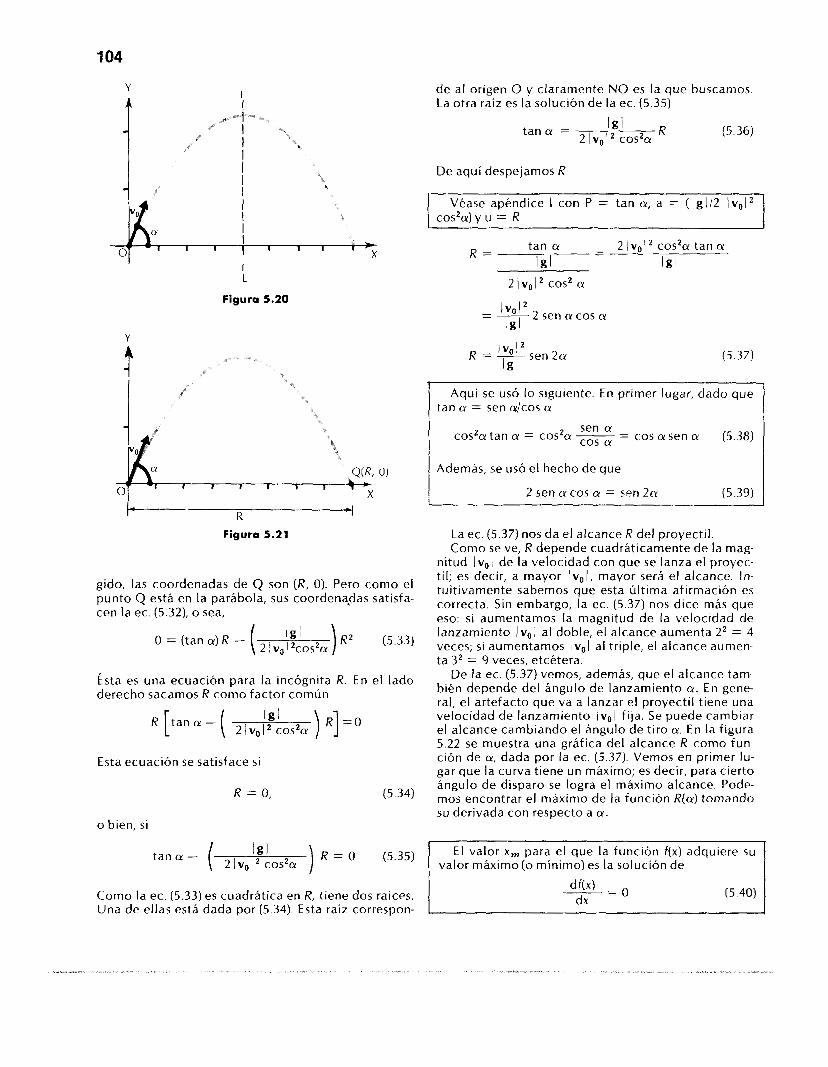
104
de al origen O y claramente NO es la que buscamos La otra raíz es la solución de la ec. (5.35)
L
Figura 5.20
Y
01
Figura 5.21
gido, las coordenadas de Q son (R, O). Pero como el punto Q está en la parábola, sus coordenafias satisfa- cen la ec. (5.32), o sea,
O = (tan (Y) R - ( I g ' ) RZ (5.33) 2 I vg l2cos2a
Ésta es una ecuación para la incógnita R. En el lado derecho sacamos R como factor común
Esta ecuación se satisface s i
R = O, (5.34)
o bien, si
tan a - (5.35)
Como la ec. (5.33) es cuadrática en R, tiene dos raíces. Una de ellas está dada por (5.34). Esta raíz correspon-
tan a = R 2 I vo l 2 cos2a
De aquí despejamos R
(5.36)
I Véase apéndice I con P = tan a, a = (lg1/2 / v o l 2 cos2a) y u = R I
(5.37)
Aquí se usó lo siguiente. En primer lugar, dado que tan Q' = sen alcos a
sen (Y cos2a tan a = cosPcy - = cos (Y sen (Y (5.38) cos (Y
Además, se usó el hecho de que
2 sen a cos a = sen 2 a (5.39)
La ec. (5.37) nos da el alcance R del proyectil. Como se ve, R depende cuadráticamente de la mag-
nitud ¡vol de la velocidad con que se lanza el proyec- til; es decir, a mayor Ivo/, mayor será el alcance. In- tuitivamente sabemos que esta última afirmación es correcta. Sin embargo, la ec. (5.37) nos dice más que eso: s i aumentamos la magnitud de la velocidad de lanzamiento /vol al doble, el alcance aumenta 22 = 4 veces; s i aumentamos /vol al triple, el alcance aumen- ta 32 = 9 veces, etcétera.
De la ec. (5.37) vemos, además, que el alcance tam- bién depende del ángulo de lanzamiento a. En gene- ral, el artefacto que va a lanzar el proyectil tiene una velocidad de lanzamiento /vol f i ja. Se puede cambiar el alcance cambiando el ángulo de tiro (Y. En la f igura 5.22 se muestra una gráfica del alcance R como fun- ción de (Y, dada por la ec. (5.37). Vemos en primer lu- gar que la curva tiene un máximo; es decir, para cierto ángulo de disparo se logra el máximo alcance. Pode- mos encontrar el máximo de la función /?(a) tomando su derivada con respecto a a.
E l valor x, para el que la función f(x) adquiere su valor máximo (o mínimo) es la solución de
(5.40)
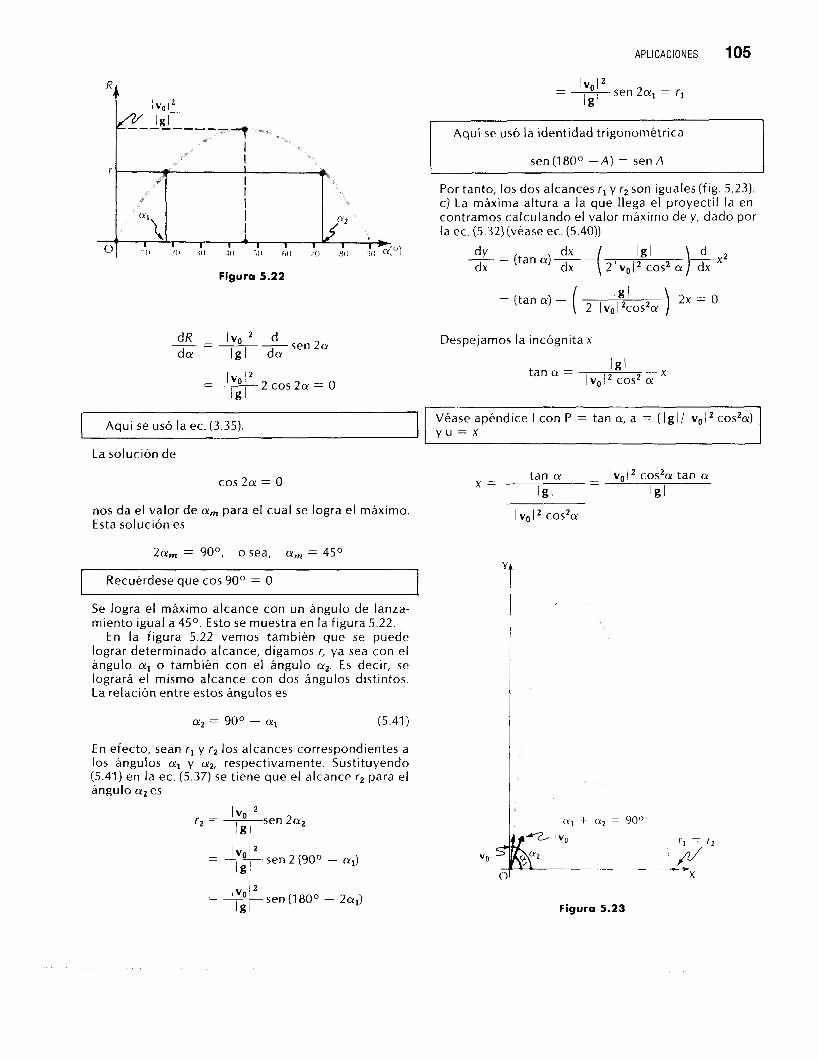
APLICACIONES 105
- -- Iv0l2 sen 2a1 = rl I V ~ l Z Jg l
rJ I d " """_
, > * " t
I Aquí se usó la identidad trigonométrica
sen (180O " A ) = sen A I
I Por tanto, los dos alcances rl y r2 son iguales (fig. 5.23).
r . -i
T I
I I I
6
c) La máxima altura a la que llega el proyectil la en- contramos calculando el valor máximo de y, dado por la ec. (5.32)(véase ec. (5.40))
; ( I ;, :o 4 1 ,I,, :,I ;!I <;!I%) dY - = (tan a)- -
Figura 5.22 dx
= (tan a) - ) 2x = o
dR - I ~ o i * d sen 2 a da Igl da
- "
Iv0l2 2 cos 2 a = o
Despejamos la incógnita x
tan a = x I vo I cos2 a
Aquí se usó la ec. (3.35). apéndice I con P = tan a, a = ( I g I / I vo I cos2a) y u = x
La solución de
cos 2cY = o nos da el valor de am para el cual se logra el máximo. Esta solución es
I vo I cos2cY
2am = 90°, o sea, a, = 45O
I Recuérdese'que cos 90° = O I Se logra el máximo alcance con un ángulo de lanza- miento igual a 45O. Esto se muestra en la figura 5.22.
En la figura 5.22 vemos también que se puede lograr determinado alcance, digamos r, ya sea con el ángulo al o también con el ángulo a2. Es decir, se logrará el mismo alcance con dos ángulos distintos. La relación entre estos ángulos es
a2 = g o o - a1 (5.41)
En efecto, sean r1 y r2 los alcances correspondientes a los ángulos al y a2, respectivamente. Sustituyendo (5.41) en la ec. (5.37) se tiene que el alcance r2 para el ángulo a2 es
- - -. / vo l2
lgl sen 2 (90° - al)
- -~ /vol2 sen (1 80° - 2a1) Figura 5.23
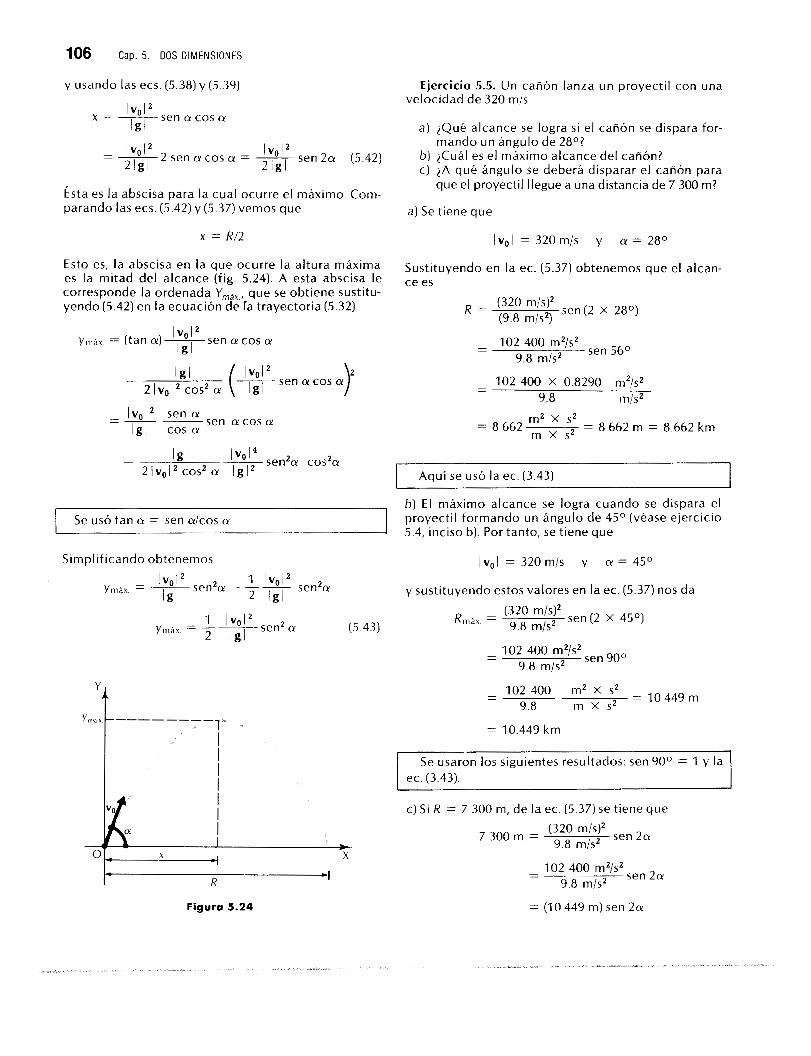
106 Cap. 5. DOS DIMENSIONES
y usando las ecs. (5.38) y (5.39)
- I vo! 21gl
-- !vol2 2 l g l
2 sen a cos a = ___ sen 2a (5.42)
ÉSta es la abscisa para la cual ocurre el máximo. Com- parando las ecs. (5.42) y (5.37) vemos que
x = R/2
Esto es, la abscisa en la que ocurre la altura máxima es la mitad del alcance (fig. 5.24). A esta abscisa le corresponde la ordenada Ymdx,, que se obtiene sustitu- yendo (5.42) en la ecuación de [a trayectoria (5.32)
y,,,áx = (tan a)- sen a cos a Ivo12 l g l
Ejercicio 5.5. Un cañón lanza un proyecti l con una velocidad de 320 mis.
a) jQué alcance se logra si el cañón se dispara for-
b) >Cuál es el máximo alcance del cañón? c) jA qué ángulo se deberá disparar el cañón para
mando un ángulo de 28O?
que el proyectil llegue a una distancia de 7 300 m?
a) Se tiene que
lvo l = 320m/s y a = 28O
Sustituyendo en la ec. (5.37) obtenemos que el alcan- ce es
R = (320 m’s)2 sen (2 X 28O) (9.8 m/s2)
- - 102 400 m2/sZ sen 560 9.8 mis2
102 400 X 0.8290 m2/s2 9.8 mis2
- -
= 8 662 = 8 662 m = 8.662 k m m 2 X s2 m X s2
Aquí se usó la ec. (3.43) I b) E l máximo alcance se logra cuando se dispara el
Se usó tan a = sen aÍcos a 5.4, inciso b). Por tanto, se tiene que proyecti l formando un ángulo de 45O (véase ejercicio
Simplificando obtenemos
(5.43)
Figura 5.24
! v o l = 320 mis y a = 45O
y sustituyendo estos valores en la ec. (5.37) nos da
- - 102 400 m2/s2 sen 9.8 mis2
- - 102 400 m2 X S’ 9.8 m X s 2
= 10 449 m
= 10.449 k m
Se usaron los siguientes resultados: sen 90’ 2 1 Y la ec. (3.43).
c) S i R = 7 300 m, de la ec. (5.37) se tiene que
7 300 m = (320 mis)2 sen 2a 9.8 mis2
- - 102 400 mz/s2 sen 2a 9.8 mis2
= (IO 449 m) sen 2 a
Despejamos sen 2 a
107
sen 2 a = 300 m = 0.6986 10 449 m
Por tanto,
2 a = arc sec 0.6986 = 44O19'3"
Y a = 22O9'31 "
Del ejercicio 5.4 sabemos que con el ángulo
@ = 900 - (Y = 90' - 22'9'31 "
= 67OS0'28"
se logra también el mismo alcance. Por tanto, se logra el alcance requerido disparando el proyectil con cual- quiera de los ángulos a o @ acabados de obtener.
Ejercicio 5.6. Se encuentra que si se lanza un pro- yecti l formando un ángulo de 38O tiene un alcance de 14 km. >Cuál es la magnitud de la velocidad con que es disparado el proyectil?
De la ec. (5.37) despejamos 1 vo I
Véase apéndice I con P = R, a = sen 2a/ Ig I y u = Iv0l2
/vol2 = R l g l sen 2a
Ahora sacamos raíz cuadrada
(5.44)
Sustituimos ¡os valores R = 14 km = 1 4 O00 m y a = 38O.
l v o l .\/ sen (2 X 38O) 14 O00 m X 9.8 mis2
= 137 200 m2/s2 137 200 m2 sen 76O 0.9703 s2
= d l 4 1 400 m2/s2 = 376 m/s
Figura 5.25
del sistema en el punto en que se encuentra inicial- mente el electrón. Llamemos a las aceleraciones cons- tantes a, y ay.
Según el Principio de Superposición podemos con- siderar los movimientos perpendiculares independien- temente. Dado que cada una de las aceleraciones es constante, el movimiento a lo largo de cada uno de los ejes coordenados es uniformemente acelerado. Usamos entonces las ecs. (4.38) y (4.39) para este movi- miento.
i ) Movimiento a lo largo del eje X. Se tiene que
x. = O; v, = O; a = a ,
Sustituyendo estas cantidades en las ecuaciones gene- rales (4.38) y (4.39)
adt) = a , (5.45a) vdt) = a,t (5.45b) x(t) = (1/2)a,t2 (5.45c)
i i ) Movimiento a lo largo del eje Y. Se tiene que
y o = O; voy = O; a = ay
Sustituyendo estas cantidades en las ecs. (4.38) y (4.39) (ahora en lugar de x se escribe y)
a,,(t) = ay (5.46a) vJt) = ayt (5.4613)
YO) = ( l /2)ayt2 (5.46~)
Ejercicio 5.7. Un electrón, inicialmente en reposo, experimenta dos aceleraciones perpendiculares, cada una de ellas constante. >Qué trayectoria describe el electrón?
Tomemos un sistema de coordenadas tal que los ejes coincidan con las direcciones de las acelera- ciones dadas (fig. 5.25). Además, escogemos el origen Vease apéndice I con P = x,a = a,i2 y u = t2 I
Las ecs. ( 5 . 4 5 ~ ) y (5 .46~) nos dan las coordenadas del electrón en cada instante y constituyen las ecuacio- nes paramétricas de la trayectoria, con el parámetro t. Eliminaremos t de estas ecuaciones. Despejamos t2 de la ec. (5.45c)(y escribimos x(t) = x, y(t) = y).
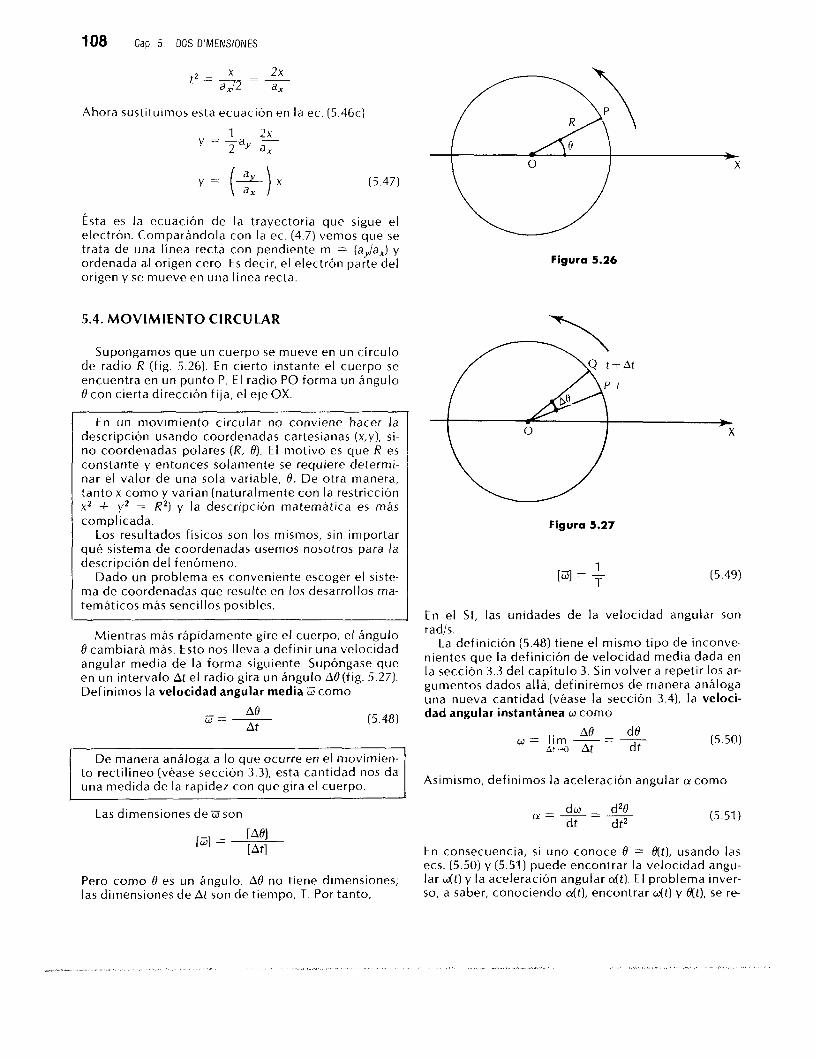
108 Cao. 5. DOS DIMENSIONES
t 2 = x - 2x =-a, Ahora sustituimos esta ecuación en la ec. (5.46~)
y = -ay- 1 2 2x a x a\ e R
+ X
Y = ( * )x (5.47)
ÉSta es la ecuación de la trayectoria que sigue el electr6n. Comparándola con la ec. (4.7) vemos que se trata de una línea recta con pendiente m = (ay/ax) y ordenada a.1 origen cero. E s decir, el electrón parte del Figura 5.26 origen y se mueve en una línea recta.
5.4. MOVIMIENTO CIRCULAR
Supongamos que un cuerpo se mueve en un circulo de radio R (fig. 5.26). E n cierto instante el cuerpo se encuentra en un punto P. E l radio PO forma u n ángulo O con cierta dirección fija, el eje OX.
En un movimiento circular no conviene hacer la descripción usando coordenadas cartesianas (x,y), si- no coordenadas polares (R, O). E l mot ivo es que R es constante y entonces solamente se requiere determi- nar el valor de una sola variable, 8. De otra manera, tanto x como y varían (naturalmente con la restricción x* + y2 = R2) y la descripción matemática es más complicada.
Los resultados físicos son los mismos, sin importar qué sistema de coordenadas usemos nosotros para la descripción del fenómeno.
Dado un problema es conveniente escoger el siste- ma de coordenadas que resulte en los desarrollos ma- temáticos más sencillos posibles.
Mientras más rápidamente gire el cuerpo, el ángulo 0 cambiará más. Esto nos lleva a definir una velocidad angular media de la forma siguiente. Supóngase que en un intervalo At el radio gira un ángulo AO(fig. 5.27). Definimos la velocidad angular media ’LScomo
(5.48)
De manera análoga a lo que ocurre en el movimien- to recti líneo (vease sección 3.3), esta cantidad nos da una medida de la rapidez con que gira el cuerpo.
I
Las dimensiones d e a s o n
Pero como O es un ángulo, A0 no tiene dimensiones; las dimensiones de At son de tiempo, T. Por tanto,
Figura 5.27
1 = r (5.49)
En el SI, las unidades de la velocidad angular son radls.
La definición (5.48) tiene el mismo tipo de inconve- nientes que la definición de velocidad media dada en la sección 3.3 del capítulo 3. Sin volver a repetir los ar- gumentos dados allá, definiremos de manera análoga una nueva cantidad (véase la sección 3.4), la veloci- dad angular instantánea w como
(5.50)
Asimismo, definimos la aceleración angular a como
a=---”- d w - d28 dt dt2 (5.51)
En consecuencia, s i uno conoce O = fit), usando las ecs. (5.50) y (5.51) puede encontrar la velocidad angu- lar w(t) y la aceleración angular dt). E l problema inver- so, a saber, conociendo dt), encontrar w(t) y Rt), se re-
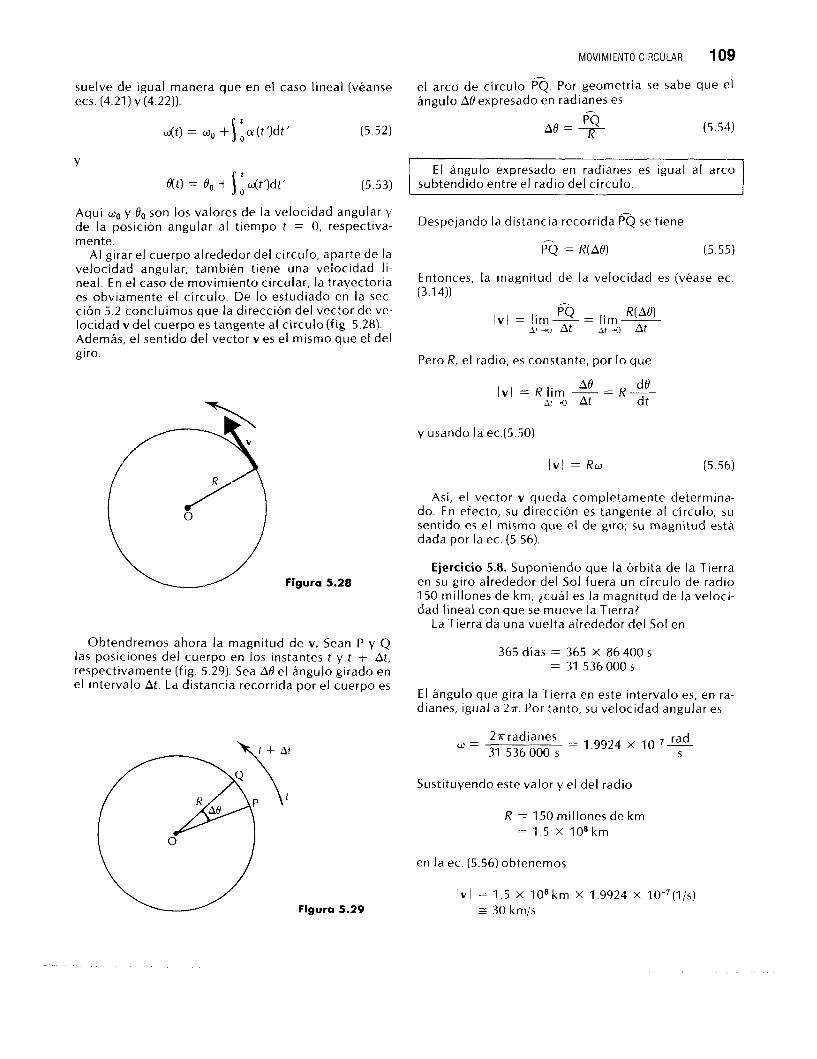
MOVIMIENTO CIRCULAR 109
suelve de igual manera que en el caso lineal (véanse el arco de círculo PQ. Por geometría se sabe que el ecs. (4.21) y (4.22)). ángulo A8 expresado en radianes es
-
Y
(5.52) 6 A8 = __ R (5.54)
~ ~ ~~~ __ ~~
E l ángulo expresado en radianes es igual al arco s(t) = Bo + 4t ' )dt ' (5.53) subtendido entre el radio del círculo.
Aquí wo y O0 son los valores de la velocidad angular y de la posición angular al tiempo 1 = o, respectiva- Despejando la distancia recorrida FQ se tiene mente.
AI girar el cuerpo alrededor del círculo, aparte de la velocidad angular, también tiene una velocidad Ii-
es obviamente el círculo. De lo estudiado en la sec- (3.14)) ción 5.2 concluimos que la dirección del vector de ve- % - R(A@ locidad v del cuerpo es tangente al círculo (fig. 5.28). / V I = ¡ím-- lím-" Además, el sentido del vector v es el mismo que el del
A( "o At ~ t - 4 At
giro. Pero R, el radio, es constante, por lo que
6 = R(A8) (5.55)
neal. En el caso de movimiento circular, la trayectoria Entonces, la magnitud de la velocidad es (vease ec.
A8 df? At -o At d t
/ V I = R l ím - = R-
y usando la ec.(5.50)
l v ! = Rw (5.56)
Así, el vector v queda completamente determina- do. En efecto, su dirección es tangente al círculo; su sentido es el mismo que el de giro; su magnitud está dada por la ec. (5.56).
Ejercicio 5.8. Suponiendo que la órbita de la Tierra Figura 5.28 en su giro alrededor del Sol fuera un círculo de radio
150 millones de km, jcuál es la magnitud de la veloci- dad lineal con que se mueve la Tierra?
La Tierra da una vuelta alrededor del Sol en Obtendremos ahora la magnitud de v. Sean P y Q
las posiciones del cuerpo en los instantes t y t + At, respectivamente (fig. 5.29). Sea A8 el ángulo girado en = 31 536 O00 S el intervalo At. La distancia recorrida por el cuerpo es
365 días = 365 X 86 400 S
E l ángulo que gira la Tierra en este intervalo es, en ra- dianes, igual a 2 ~ . Por tanto, su velocidad angular es
Figura 5.29
w = 27r radianes 31 536 O00 S
= 1.9924 X rad S
Sustituyendo este valor y el del radio
R = 150 millones de km = 1.5 X 1 0 * k m
en la ec. (5.56) obtenemos
l v / = 1 . 5 X 1 0 * k m X 1.9924 X 10-7( l /s) = 30 kmis
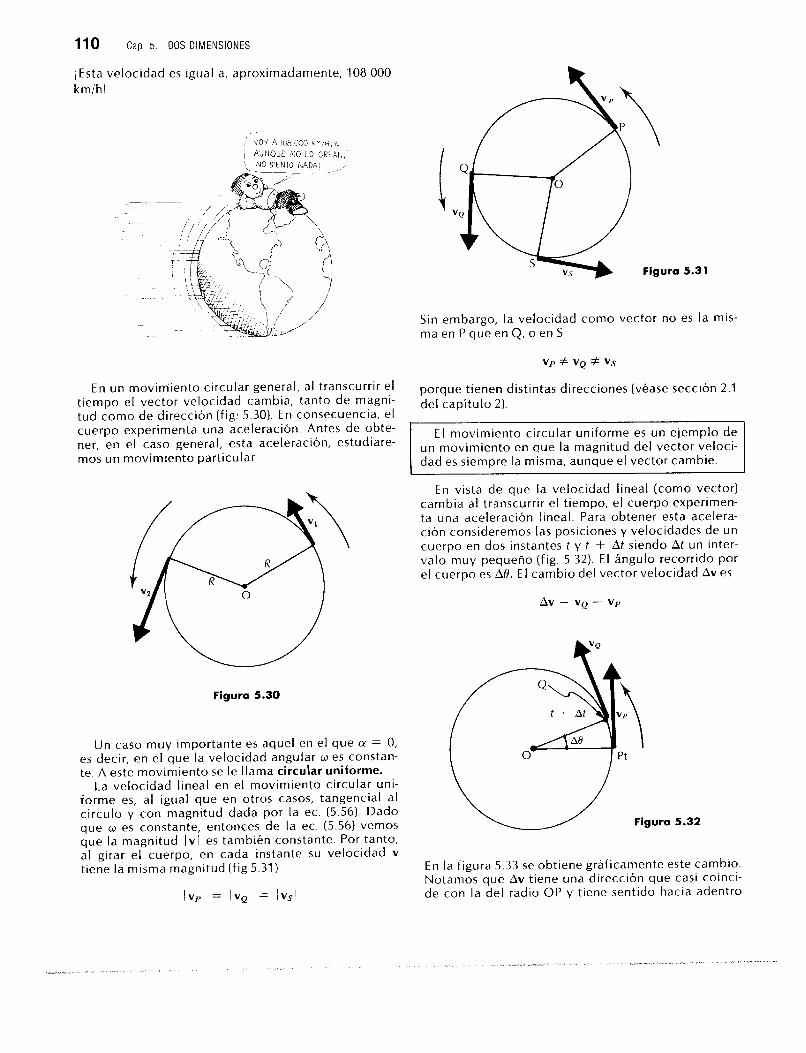
110 CaD. 5. DOS DIMENSIONES
¡Esta velocidad es igual a, aproximadamente, 108 O00 kmih!
En un moviníiento circular general, al transcurrir el t iempo el vector velocidad cambia, tanto de magni- tud como de dirección (f ig: 5.30). En consecuencia, el cuerpo experimenta una aceleración. Antes de obte- ner, en el caso general, esta aceleración, estudiare- mos un movimiento particular.
Figura 5.30
Un caso muy importante es aquel en el que a = O, es decir, en el que la velocidad angular w es constan- te. A este movimiento se le l lama circular uniforme.
La velocidad lineal en el movimiento circular uni- forme es, al igual que en otros casos, tangencia1 al círculo y con magnitud dada por la ec. (5.56). Dado que o es constante, entonces de la ec. (5.56) vemos que la magnitud I v l es también constante. Por tanto, al girar el cuerpo, en cada instante su velocidad v tiene la misma magnitud (fig 5.31)
lvpl = I V Q I = lvsl
Sin embargo, la velocidad como vector no ma en P que en Q, o en S
5.3 1
es la mis-
porque tienen distintas direcciones (véase sección 2.1 del capítulo 21.
E l movimiento circular uniforme es un ejemplo de un movimiento en que la magnitud del vector veloci- dad es siempre la misma, aunque el vector cambie.
En vista de que la velocidad lineal (como vector) cambia al transcurrir el tiempo, el cuerpo experimen- ta una aceleración lineal. Para obtener esta acelera- ción consideremos las posiciones y velocidades de un cuerpo en dos instantes t y t + At siendo At un inter- valo muy pequeño (f ig. 5.32). E l ángulo recorrido por el cuerpo es AO. E l cambio del vector velocidad Av es
AV = VQ - V p
Figura 5.32
En la figura 5.33 se obtiene gráficamente este cambio. Notamos que Av tiene una dirección que casi coinci- de con la del radio OP y tiene sentido hacia adentro
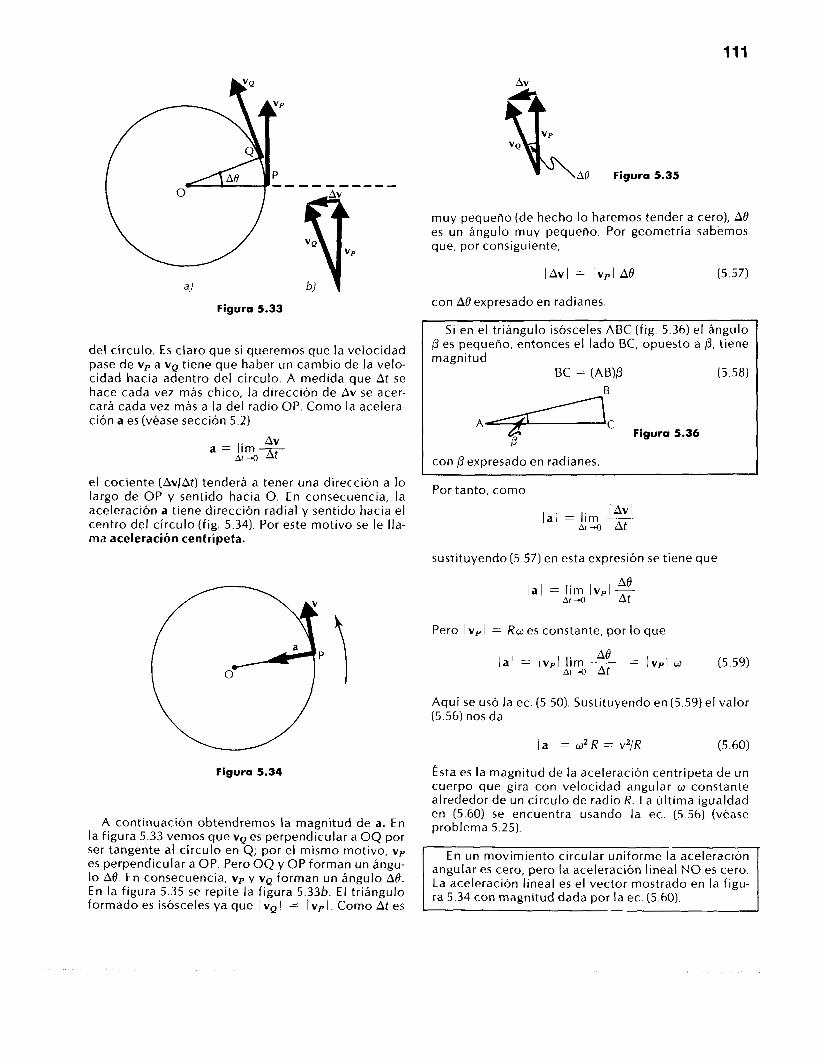
111 Av
Figura 5.33
""""
del círculo. Es claro que si queremos que la velocidad pase de vp a VQ tiene que haber un cambio de la velo- cidad hacia adentro del círculo. A medida que At se hace cada vez más chico, la dirección de Av se acer- cará cada vez mas a la del radio OP. Como la acelera. ción a es (véase sección 5.2)
a = lím Av At - o a t
el cociente (AvlAt) tenderá a tener una dirección a lo largo de OP y sentido hacia O. En consecuencia, la aceleración a tiene dirección radial y sentido hacia el centro del circulo (fig. 5.34). Por este mot ivo se le Ila- ma aceleración centrípeta.
Figura S.34
A continuación obtendremos la magnitud de a. En la figura 5.33 vemos que vQ es perpendicular a OQ por ser tangente al círculo en Q; por el mismo motivo, vp es perpendicular a OP. Pero OQ y OP forman un ángu- lo A0. En consecuencia, vp y vQ forman un ángulo A6. En la figura 5.35 se repite la figura 5.33b. E l triángulo formado es isósceles ya que /vpI = lvpl. Como At es
muy pequeño (de hecho lo haremos tender a cero), A6 es un ángulo muy pequeño. Por geometría sabemos que, por consiguiente,
IAvl = /vpl A0 (5.57)
con A0 expresado en radianes
Si en el triángulo isósceles ABC (fig. 5.36) el ángulo 0 es pequeño, entonces el lado BC, opuesto a 0, tiene magnitud
BC = (AB10 (5.58)
con 0 expresado en radianes.
Por tanto, como
la1 = lím - IAvl A t + At
sustituyendo (5.57) en esta expresión se tiene que
l a / = lím /vpI- A0 A t 4 At
Pero I vp/ = Rw es constante, por lo que
A8 A t 4 At / a l = lvpl l ím - = l V p / (5.59)
Aquí se usó la ec. (5.50). Sustituyendo en (5.59) el valor (5.56) nos da
/ a l = w 2 R = vz/R (5.60)
Ésta es la magnitud de la aceleración centrípeta de un cuerpo que gira con velocidad angular w constante alrededor de un círculo de radio R. La última igualdad en (5.60) se encuentra usando la ec. (5.56) (véase problema 5.25).
En un movimiento circular uniforme la aceleración angular es cero, pero la aceleración lineal NO es cero. La aceleración lineal es el vector mostrado en la figu- ra 5.34 con magnitud dada por la ec. (5.60).
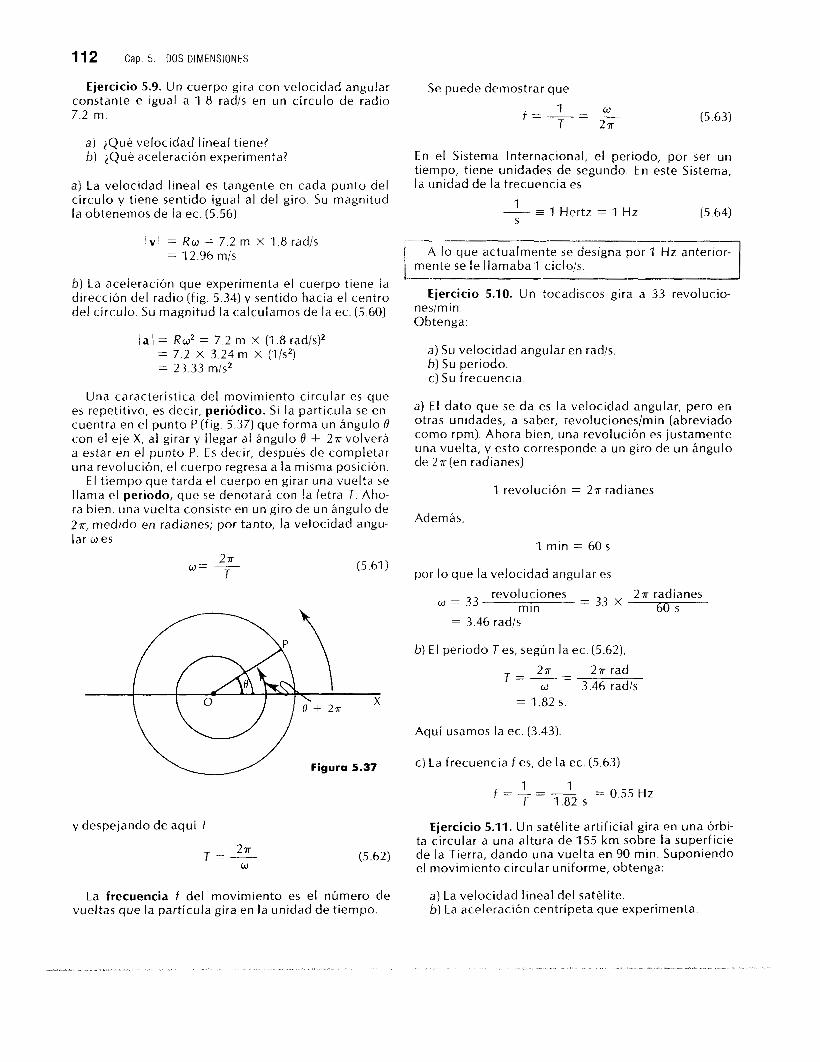
11 2 Cap. 5. DOS DIMENSIONES
Ejercicio 5.9. Un cuerpo gira con velocidad angular Se puede demostrar que constante e igual a 1.8 rad/s en un círculo de radio 7.2 m. f="- 1 - W
T 2 a (5.63)
a ) iQué velocidad l ineal t iene? b) iQué aceleración experimenta? En el Sistema Internacional, el periodo, por ser un
tiempo, tiene unidades de segundo. En este Sistema, a) La velocidad lineal es tangente en cada punto del la unidad de la frecuencia es círculo y tiene sentido igual al del giro. Su magnitud la obtenemos de la ec. (5.56) _ _ _ _ = 1 Hertz = 1 Hz [ 5.63)
S
/ v i = Rw = 7.2 m X 1.8 rad/s = 12.96 mis A lo que actualmente se designa por 1 Hz anterior-
mente se le l lamaba 1 ciclois. 6) La aceleración que experimenta el cuerpo t iene /a ' dirección del rad,o (fig, 5.34) y hacia el centro Ejercicio 5.10. U n tocadiscos gira a 33 revolucio- del círculo. Su magnitud la calculamos de la ec. (5.60) nes'min.
I
Obtenga: 1 a 1 = Ru2 = 7.2 m X (1.8 rad/s)2
= 7.2 X 3.24 m X ( l i s ' ) = 23.33 m/s2
Una característica del movimiento circular es que es repetitivo, es decir, peribdico. Si la partícula se en- cuentra en el punto P (fig. 5.37) que forma un ángulo 0 con el eje X, al girar v llegar al ángulo 0 + 2 n volverá a estar en el punto P. Es decir, después de completar una revolución, el cuerpo regresa a la misma posición.
E l t iempo que tarda el cuerpo en girar una vuelta se l lama el periodo, que se denotará con la letra T. Aho- ra bien, una vuelta consiste en un giro de un ángulo de 2n, medido en radianes; por tanto, la velocidad angu- lar u es
__ 2 n T
(5.61)
u Figura 5.37
y despejando de aquí T
T = - 27r (5.62) w
La frecuencia f del movimiento es el número de vueltas que la partícula gira en la unidad de t iempo.
a) S u velocidad angular en radls. b) Su periodo. c) Su frecuencia.
a) E l dato que se da es la velocidad angular, pero en otras unidades, a saber, revo!uciones/min (abreviado como rpm). Ahora bien, una revolución es justamente una vuelta, y esto corresponde a un giro de un ángulo de 27r!en radianes)
1 revolución = 27rradianes
Además,
1 min = 60 S
por lo que la velocidad angular es
w = 33 revoluciones 27r radianes = 33 x mln 60 S = 3.46 radls
b) E I periodo T es, según la ec. (5.62).
2a - 27r rad T = - - w 3.46 rad/s
= 1.82 S
Aquí usamos la ec. (3.43).
c) La frecuencia f es, de la ec. (5.63)
Ejercicio 5.11. Un satélite artif icial gira en una órbi- ta circular a una altura de 155 k m sobre la superficie de la Tierra, dando una vuelta en 90 min. Suponiendo el movimiento circular uniforme, obtenga:
a) La velocidad lineal del satélite. b) La aceleración centrípeta que experimenta
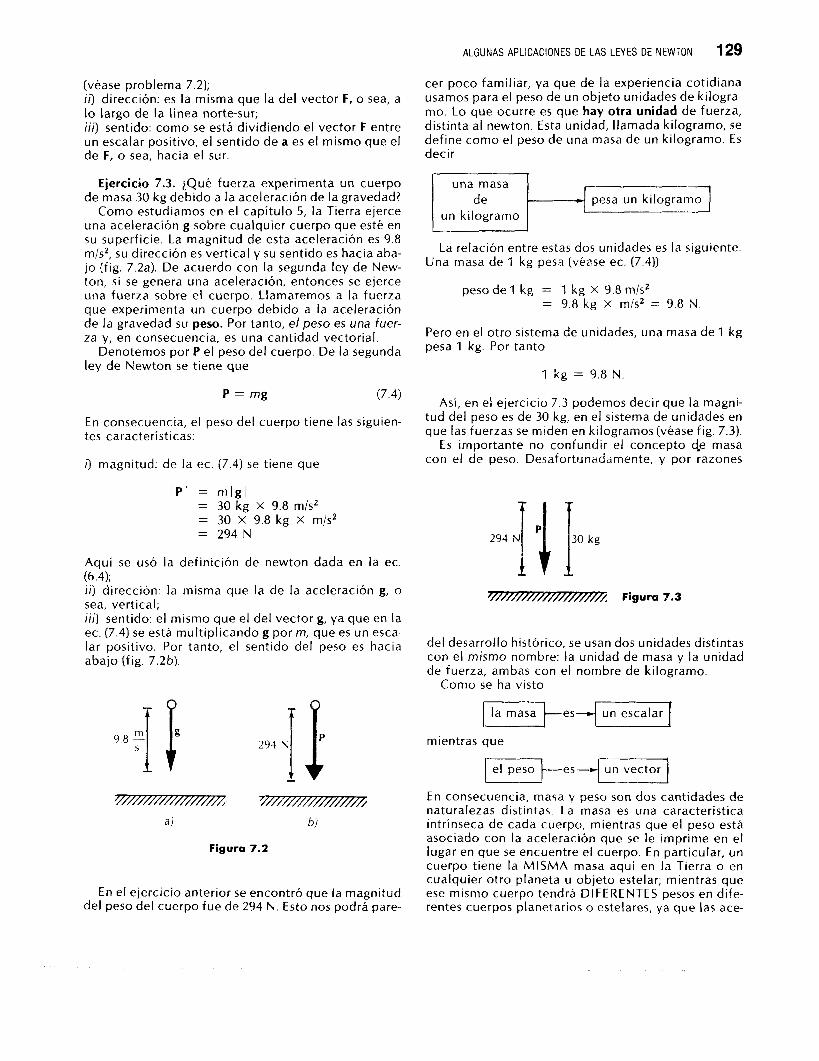
ALGUNAS APLICACIONES DE LAS LEYES DE NEWTON 129
(véase problema 7.2); i i ) dirección: es la misma que la del vector F, o sea, a lo largo de la línea norte-sur; i i i ) sentido: como se está dividiendo el vector F entre un escalar positivo, el sentido de a es el mismo que el de F, o sea, hacia el scr.
Ejercicio 7.3. iQué fuerza experimenta un cuerpo de masa 30 kg debido a la aceleración de la gravedad?
Como estudiamos en el capítulo 5, la Tierra ejerce una aceleración g sobre cualquier cuerpo que esté en su superficie. La magnitud de esta aceleración es 9.8 mis2, su dirección es vertical y su sentido es hacia aba- jo (f ig. 7 . 2 ~ ~ ) . De acuerdo con la segunda ley de New- ton, s i se genera una aceleración, entonces se ejerce una fuerza sobre el cuerpo. Llamaremos a la fuerza que experimenta un cuerpo debido a la aceleración de la gravedad su peso. Por tanto, el peso es una fuer- za y, en consecuencia, es una cantidad vectorial.
Denotemos por P el peso del cuerpo. De la segunda ley de Newton se tiene que
P = mg (7.4)
En consecuencia, el peso del cuerpo tiene las siguien- tes características:
i) magnitud: de la ec. (7.4) se tiene que
I P I = mlgl = 30 kg X 9.8 mis2 = 30 X 9.8 kg X mis2 = 294 N
Aquí se usó la definición de newton dada en la ec. (6.4); ii) dirección: la misma que la de la aceleración g, o sea, vertical; i i i ) sentido: el mismo que el del vector g, ya que en la ec. (7.4) se está multiplicando g por m, que es un esca- lar positivo. Por tanto, el sentido del peso es hacia abajo (fig. 7.2h).
Figura 7.2
En el ejercicio anterior se encontró que la magnitud del peso del cuerpo fue de 294 N. Esto nos podrá pare-
cer poco familiar, ya que de la experiencia cotidiana usamos para el peso de un objeto unidades de kilogra- mo. Lo que ocurre es que hay otra unidad de fuerza, distinta al newton. Esta unidad, llamada kilogramo, se define como el peso de una masa de un kilogramo. Es decir
una masa
un kilogramo 1 I
La relación entre estas dos unidades es la siguiente. Una masa de 1 kg pesa (véase ec. (7.4))
peso de 1 kg = 1 kg X 9.8 m/s2 = 9.8 kg X mis2 = 9.8 N
Pero en el otro sistema de unidades, una masa de 1 kg pesa 1 kg. Por tanto
1 kg = 9.8 N
Así, en el ejercicio 7.3 podemos decir que la magni- tud del peso es de 30 kg, en el sistema de unidades en que las fuerzas se miden en kilogramos (véase fig. 7.3).
E s importante no confundir el concepto de masa con el de peso. Desafortuniidamente, y por razones
Figura 7.3
del desarrollo histórico, se usan dos unidades distintas con el mismo nombre: la unidad de masa y la unidad de fuerza, ambas con el nombre de kilogramo.
Como se ha visto
(t-es+-[
mientras que
) z t - - - e s --+KZL-~ En consecuencia, ma5a y peso son dos cantidades de naturalezas distintas. La masa es una característica intrínseca de cada cuerpo, mientras que el peso está asociado con la aceleración que se le imprime en el lugar en que se encuentre el cuerpo. En particular, un cuerpo tiene la MISMA masa aquí en la Tierra o en cualquier otro planeta u objeto estelar; mientras que ese mismo cuerpo tendrá DIFERENTES pesos en dife- rentes cuerpos planetarios o estelares, ya que las ace-
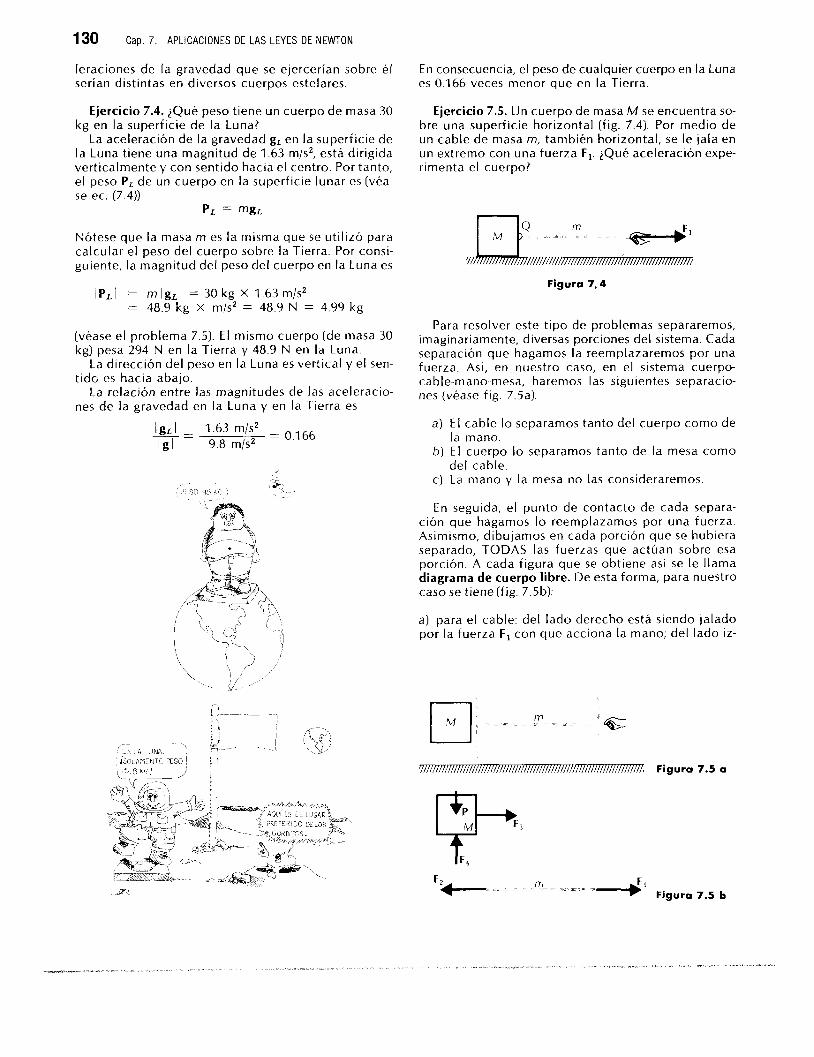
130 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
leraciones de la gravedad que se ejercerían sobre PI serían distintas en diversos cuerpos estelares.
Ejercicio 7.4. iQué peso tiene un cuerpo de masa 30 kg en la superficie de la Luna?
La aceleración de la gravedad g, en la superficie de la Luna tiene una magnitud de 1.63 mis2, está dirigida verticalmente y con sentido hacia el centro. Por tanto, el peso P, de un cuerpo en la superficie lunar es (véa- se ec. (7.4))
PL = mgL
Nótese que la masa m es la misma que se uti l izó para calcular el peso del cuerpo sobre la Tierra. Por consi- guiente, la magnitud del peso del cuerpo en la Luna es
IPLI = mlg,/ = 3 0 k g X 1.63m/s2 = 48.9 kg X m/s2 = 48.9 N = 4.99 kg
(véase el problema 7.5). E l mismo cuerpo (de masa 30 kg) pesa 294 N en la Tierra y 48.9 N en la Luna.
La dirección del peso en la Luna es vertical y el sen- t ido es hacia abajo.
La relación entre las magnitudes de las aceleracio- nes de la gravedad en la Luna y en la Tierra es
lgLI - 1.63 mis2 / g / 9.8 m/s2 " = 0.166
En consecuencia, el peso de cualquier cuerpo en la Luna es 0.166 veces menor que en la Tierra.
Ejercicio 7.5. U n cuerpo de masa M se encuentra so- bre una superficie horizontal (fig. 7.4). Por medio de un cable de masa m, también horizontal, se le jala en un extremo con una fuerza F, . iQué aceleración expe- rimenta el cuerpo?
Figura 7.4
Para resolver este tipo de problemas separaremos, imaginariamente, diversas porciones del sistema. Cada separación que hagamos la reemplazaremos por una fuerza. Así, en nuestro caso, en el sistema cuerpo- cable-mano-mesa, haremos las siguientes separacio- nes (véase fig. 7.5a):
a) E l cable lo separamos tanto del cuerpo como de
b) E l cuerpo lo separamos tanto de la mesa como
c) La mano y la mesa no las consideraremos.
la mano.
del cable.
En seguida, el punto de contacto de cada separa- ción que hagamos lo reemplazamos por una fuerza. Asimismo, dibujamos en cada porción que se hubiera separado, TODAS las fuerzas que actúan sobre esa porción. A cada figura que se obtiene así se le l lama diagrama de cuerpo libre. De esta forma, para nuestro caso se tiene (fig. 7.5b):
a) para el cable: del lado derecho está siendo jalado por la fuerza F, con que acciona la mano; del lado iz-
F2 4" - m 4' Figura 7.5 b
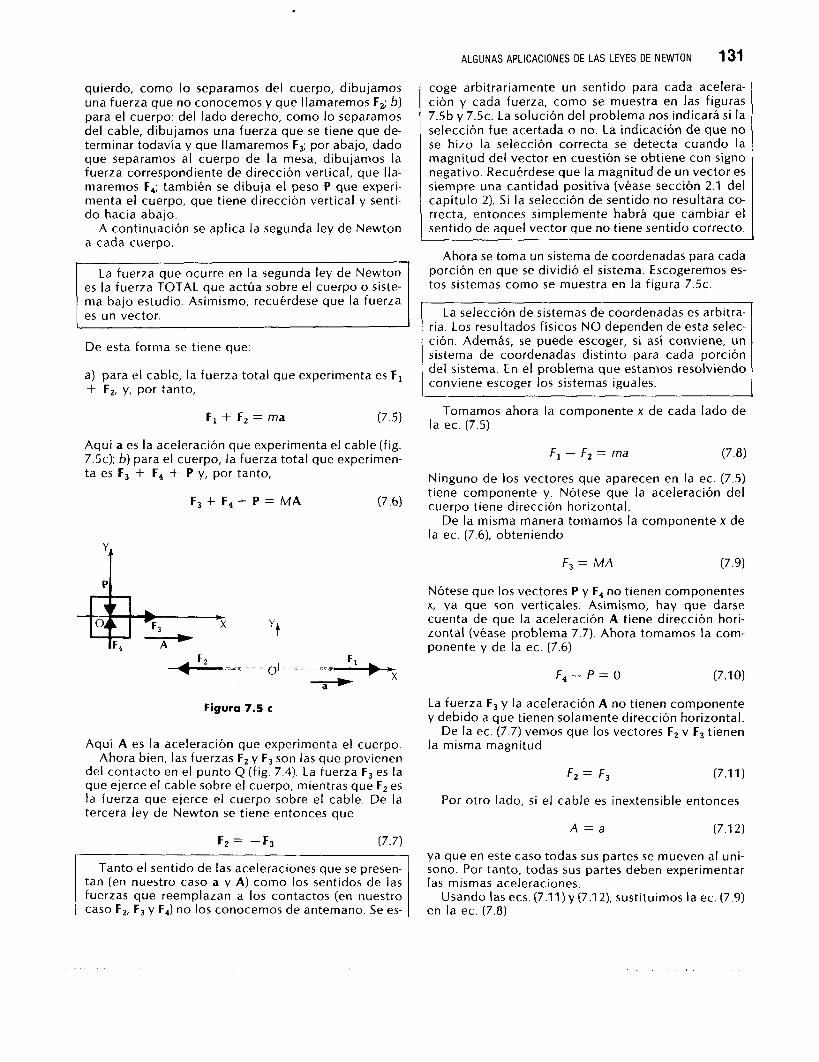
ALGUNAS APLICACIONES DE LAS LEYES DE NEWTON 131
quierdo, como lo separamos del cuerpo, dibujamos
rrecta, entonces simplemente habrá que cambiar el do hacia abajo. capítulo 2). Si la selección de sentido no resultara co- menta el cuerpo, que tiene dirección vertical y senti- siempre una cantidad positiva (véase sección 2.1 del maremos F,; también se dibuja el peso P que experi- negativo. Recuérdese que la magnitud de un vector es fuerza correspondiente de dirección vertical, que Ila- magnitud del vector en cuestión se obtiene con signo que separamos al cuerpo de la mesa, dibujamos la se hizo la selección correcta se detecta cuando la terminar todavía y que llamaremos F,; por abajo, dado selección fue acertada o no. La indicación de que no del cable, dibujamos una fuerza que se tiene que de- 7.5b y 7 . 5 ~ . La solución del problema nos indicará si la para el cuerpo: del lado derecho, como lo separamos ción y cada fuerza, como se muestra en las figuras una fuerza que no conocemos y que llamaremos F,; b) coge arbitrariamente un sentido para cada acelera-
A continuación se aplica la segunda ley de Newton sentido de aquel vector que no tiene sentido correcto. a cada cuerpo.
Ahora se toma un sistema de coordenadas para cada porción en que se dividió el sistema. Escogeremos es- tos sistemas como se muestra en la figura 7 . k .
es un vector. La selección de sistemas de coordenadas es arbitra- ria. Los resultados físicos NO dependen de esta selec-
De esta forma se tiene que:
a) para el cable, la fuerza total que experimenta es F1 + F,, y, por tanto,
ción. Además, se puede escoger, s i así conviene, un sistema de coordenadas distinto para cada porción del sistema. En el problema que estamos resolviendo conviene escoger los sistemas iguales.
F1 + F, = ma (7.5) la ec. (7.5) Tomamos ahora la componente x de cada lado de
Aquí a es la aceleración que experimenta el cable (fig. 7 .5~) ; b) para el cuerpo, la fuerza total que experimen- ta es F, + F, + P y, por tanto,
F1 - F2 = ma (7.8)
Ninguno de los vectores que aparecen en la ec. (7.5) tiene componente y. Nótese que la aceleración del
De la misma manera tomamos la componente x de F , + F , + P = MA (7.6) cuerpo tiene dirección horizontal.
’t la ec. (7.6), obteniendo
F, = MA (7.9)
Nótese que los vectores P y F, no tienen componentes x, ya que son verticales. Asimismo, hay que darse cuenta de que la aceleración A tiene dirección hori- zontal (véase problema 7.7). Ahora tomamos la com- ponente Y de la ec. (7.6)
Figura 7.5 c
Aquí A es la aceleración que experimenta el cuerpo. Ahora bien, las fuerzas F2 y F 3 son las que provienen
del contacto en el punto Q (fig. 7.4). La fuerza F, es la que ejerce el cable sobre el cuerpo, mientras que F, es la fuerza que ejerce el cuerpo sobre el cable. De la tercera ley de Newton se tiene entonces que
FZ= “3 (7.7)
Tanto el sentido de las aceleraciones que se presen- tan (en nuestro caso a y A) como los sentidos de las fuerzas que reemplazan a los contactos (en nuestro caso F,, F3 y F4) no los conocemos de antemano. Se es-
La fuerza F, y la aceleración A no tienen componente y debido a que tienen solamente dirección horizontal.
De la ec. (7.7) vemos que los vectores F, y F, tienen la misma magnitud
Por otro lado, si el cable es inextensible entonces
A = a (7.1 2)
ya que en este caso todas sus partes se mueven al uní- sono. Por tanto, todas sus partes deben experimentar las mismas aceleraciones.
Usando las ecs. ( 7 . 1 1 ) ~ (7.12), sustituimos la ec. (7.9) en la ec. (7.8)
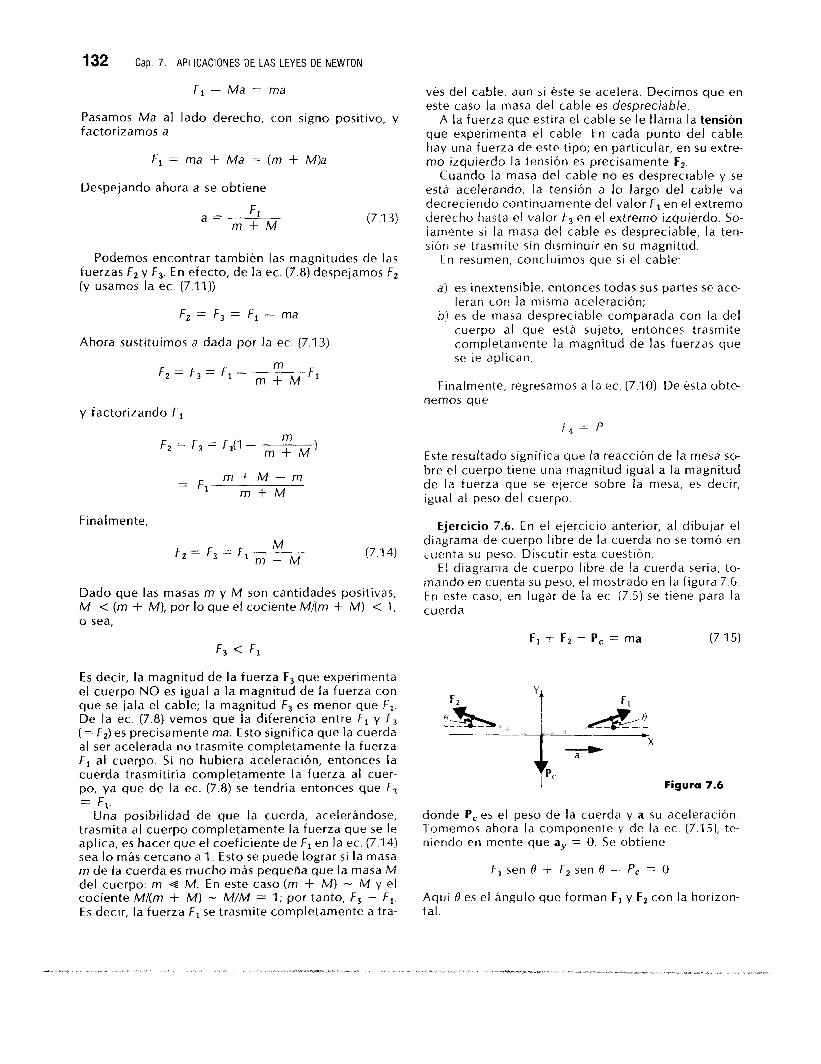
132 Cap. 7. APLICACIONES 3~ LAS LEYES DE NEWTON
F , - Ma = ma
Pasamos Ma al lado derecho, con signo positivo, y factorizamos a
F, = ma + M a = (m
Despejando ahora a se obtiene
a = m + M
Podemos encontrar también las
+ Mb
(7.1 3)
magnitudes de las fuerzas F2 y F3. En efecto, de la ec. (7.8)”despejamos F2 (y usamos la ec. (7.11))
F2 = F , = F , - ma
Ahora sustituimos a dada por la ec. (7.13)
y factorizando F ,
= F1 m + M - m
m S M
Finalmente,
(7.13)
Dado que las masas m y M son cantidades positivas, M < (m 1- M), por lo que el cociente M/(m + M ) < 1, o sea,
E s decir, la magnitud de la fuerza F, que experimenta el cuerpo NO es igual a la magnitud de la fuerza con que se jala el cable; la magnitud F3 es menor que F,. De la ec. (7.8) vemos que la diferencia entre F , y F, ( = F,) es precisamente ma. Es to significa que la cuerda al ser acelerada no trasmite completamente la fuerza F, al cuerpo. S i no hubiera aceleración, entonces la cuerda trasmitiría completamente la fuerza al cuer- po, ya que de la ec. (7.8) se tendría entonces que F ,
Una posibilidad de que la cuerda, acelerándose, trasmita al cuerpo completamente la fuerza que se le aplica, es hacer que el coeficiente de F1 en la ec. (7.14) sea lo más cercano a 1, E s t o se puede lograr si la masa m de la cuerda es mucho más pequeña que la masa M del cuerpo: m 4 M . En este caso (m + M ) - M y el cociente Ml(m + M ) - M/M = 1; por tanto, F3 - F,. E s decir, la fuerza F, se trasmite completamente a tra-
= F,.
vés del cable, aun s i este se acelera. Decimos que en este caso la masa del cable es despreciable.
A la fuerza que estira el cable se le l lama la tensión que experimenta el cable. En cada punto del cable hay una fuerza de este tipo; en particular, en su extre- mo izquierdo la tensión es precisamente FZ.
Cuando la masa del cable no es despreciable y se está acelerando, la tensión a lo largo del cable va decreciendo continuamente del valor F1 en el extremo derecho hasta el valor F3 en el extremo izquierdo. So- lamente s i la masa del cable es despreciable, la ten- sión se trasmite sin disminuir en su magnitud.
En resumen, concluimos que si el cable:
a l , . D !
es inextensible, entonces todas sus partes se ace- leran con la misma aceleración; es de masa despreciable comparada con la del cuerpo al que está sujeto, entonces trasmite completamente la magnitud de las fuerzas que se ¡e aDlican.
Finalmente, regresamos a l a ec. (7.10). De ésta obte- nemos que
f , P
Este resultado significa que la reacción de la mesa so- bre el cuerpo tiene una magnitud igual a la magnitud de la fuerza que se ejerce sobre la mesa, es decir, igual al peso del cuerpo.
Ejercicio 7.6. En el ejercicio anterior, al dibujar el diagrama de cuerpo libre de la cuerda no se tomó en cuenta su peso. Discutir esta cuestión.
E l diagrama de cuerpo libre de la cuerda sería, to- mando en cuenta su peso, el mostrado en la figura 7.6. En este caso, en lugar de la ec. (7 5) se tiene para l a cuerda
F, i- F, + PC = ma (7.1 5)
7; Figura 7.6
donde PC es el peso de la cuerda y a su aceleración. Tomemos ahora la componente y de la ec. (7.15), te- niendo en mente que ay = O. Se obtiene
F , sen 0 + F, sen 8 - PC = O
Aquí 0 es el ángulo que forman F , y F2 con la horizon- tal.
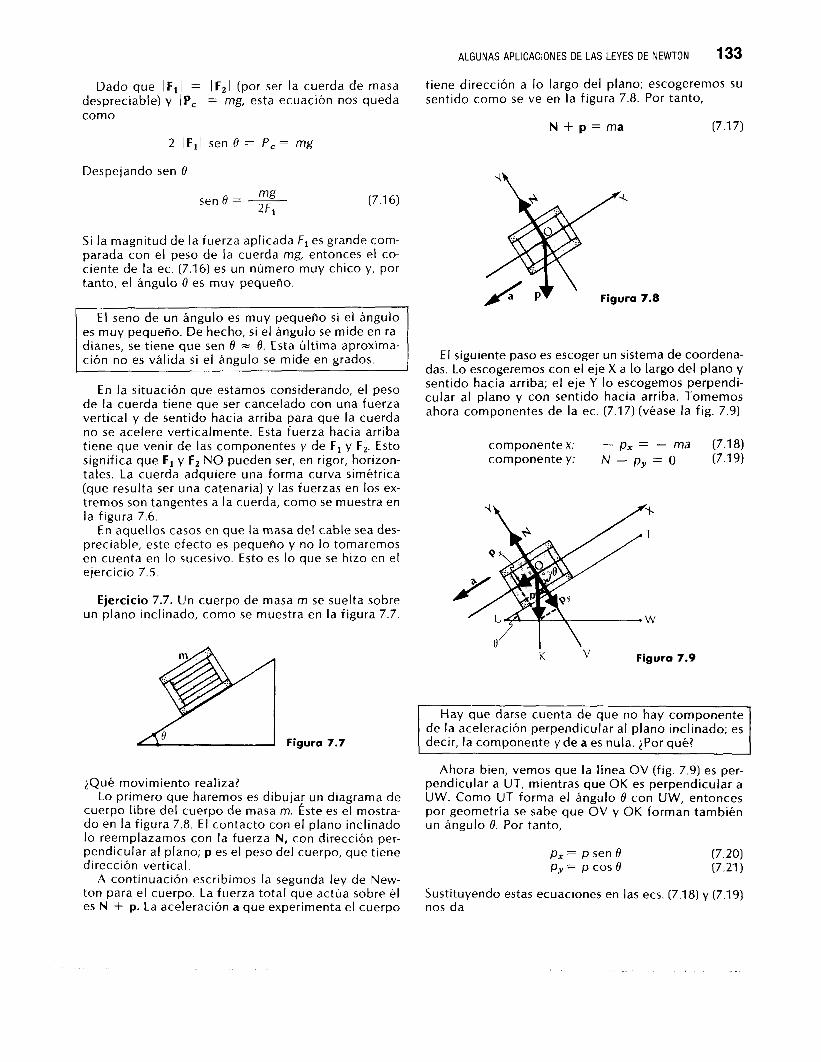
ALGUNAS APLICACIONES DE LAS LEYES DE NEWTON 133
Dado que I F, I = I F2/ (por ser la cuerda de masa despreciable) y \PC/ = mg, esta ecuación nos queda como
tiene dirección a lo largo del plano; escogeremos su sentido como se ve en la figura 7.8. Por tanto,
N + p = m a (7.1 7) 2 / F , I sen O = P C = mg
Despejando sen O
(7.1 6)
S i la magnitud de la fuerza aplicada F, es grande com- parada con el peso de la cuerda mg, entonces el co- ciente de la ec. (7.16) es un número muy chico y, por tanto, el ángulo 8 es muy pequeno.
E l seno de un ángulo es muy pequeño s i el ángulo es muy pequeño. De hecho, si el ángulo se mide en ra- dianes, se tiene que sen O = O. Esta última aproxima- ción no es válida si el ángulo se mide en grados.
En la situación que estamos considerando, el peso de la cuerda tiene que ser cancelado con una fuerza vertical y de sentido hacia arriba para que la cuerda no se acelere verticalmente. Esta fuerza hacia arriba tiene que venir de las componentes y de F, y F1. Esto significa que F, y F2 NO pueden ser, en rigor, horizon- tales. La cuerda adquiere una forma curva simétrica (que resulta ser una catenaria) y las fuerzas en los ex- tremos son tangentes a la cuerda, como se muestra en la figura 7.6.
En aquellos casos en que la masa del cable sea des- preciable, este efecto es pequeño y no lo tomaremos en cuenta en lo sucesivo. Esto es lo que se hizo en e l ejercicio 7.5.
E l siguiente paso es escoger un sistema de coordena- das. Lo escogeremos con el eje X a lo largo del plano y sentido hacia arriba; el eje Y lo escogemos perpendi- cular al plano y con sentido hacia arriba. Tomemos ahora componentes de la ec. (7.17) (véase la fig. 7.9)
componente x: - px = - ma (7.18) componente y: N - p,, = o (7.19)
Ejercicio 7.7. Un cuerpo de masa m se suelta sobre un plano inclinado, como se muestra en la figura 7.7.
e’ I \ I(. V Figura 7.9
Figura 7.7
Hay que darse cuenta de que no hay componente de la aceleración perpendicular al plano inclinado; es decir, la componente y de a es nula. iPor qué?
>Qué movimiento realiza? Lo primero que haremos es dibuja; un diagrama de
cuerpo libre del cuerpo de masa m. Este es el mostra- do en la figura 7.8. E l contacto con el plano inclinado lo reemplazamos con la fuerza N, con dirección per- pendicular al plano; p es el peso del cuerpo, que tiene dirección vertical.
A continuación escribimos la segunda ley de New- ton para el cuerpo. La fuerza total que actúa sobre éI es N + p. La aceleración a que experimenta el cuerpo
~~
Ahora bien, vemos que la línea OV (fig. 7.9) es per- pendicular a UT, mientras que OK es perpendicular a UW. Como UT forma el ángulo O con UW, entonces por geometría se sabe que O V y OK forman también un ángulo O. Por tanto,
(7.20) (7.21)
Sustituyendo estas ecuaciones en las ecs. (7.18) y (7.19) nos da
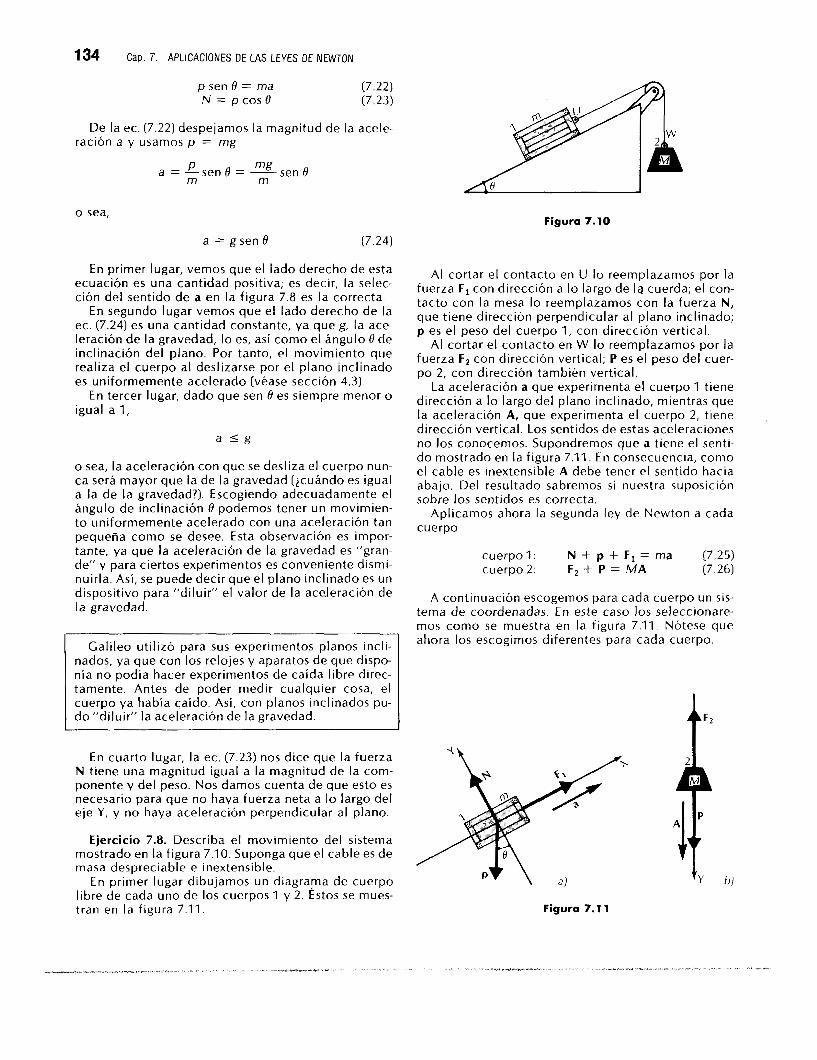
134 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
p sen 8 = ma N = p cos 8
(7.22) (7.23)
De la ec. (7.22) despejamos la magnitud de la acele- ración a y usamos p = mg
a = -sen8 = __ mg sen O P m m
o sea,
a = gsen 8 (7.24)
En primer lugar, vemos que el lado derecho de esta ecuación es una cantidad positiva; es decir, la selec- ción del sentido de a en la figura 7.8 es la correcta.
En segundo lugar vemos que el lado derecho de la ec. (7.24) es una cantidad constante, ya que g, la ace- leración de la gravedad, lo es, así como el ángulo 8 de inclinación del plano. Por tanto, el movimiento que realiza el cuerpo al deslizarse por el plano inclinado es uniformemente acelerado (véase sección 4.3).
En tercer lugar, dado que sen 8 es siempre menor o igual a 1,
a ~g
o sea, la aceleración con que se desliza el cuerpo nun- ca será mayor que la de la gravedad (jcuándo es igual a la de la gravedad?). Escogiendo adecuadamente el ángulo de inclinación 8 podemos tener un movimien- to uniformemente acelerado con una aceleración tan pequena como se desee. Esta observación es impor- tante, ya que la aceleración de la gravedad es "gran- de" y para ciertos experimentos es conveniente dismi- nuirla. Así, se puede decir que el plano inclinado es un dispositivo para "diluir" el valor de la acejeración de la gravedad.
Cali leo uti l izó para sus experimentos planos incli- nados, ya que con los relojes y aparatos de que dispo- nía no podía hacer experimentos de caída libre direc- tamente. Antes de poder medir cualquier cosa, el cuerpo ya había caído. Así, con planos inclinados pu-
En cuarto lugar, la ec. (7.23) nos dice que la fuerza N tiene una magnitud igual a la magnitud de la com- ponente y del peso. Nos damos cuenta de que esto es necesario para que no haya fuerza neta a lo largo del eje Y, y no haya aceleración perpendicular al plano.
Ejercicio 7.8. Describa el movimiento del sistema mostrado en la figura 7.10. Suponga que el cable es de masa despreciable e inextensible.
En primer lugar dibujamos un diagrama de cuerpo libre de cada uno de los cuerpos 1 y 2 . Estos se mues- tran en la figura 7.11.
Figura 7.10
AI cortar el contacto en U lo reemplazamos por la fuerza F, con dirección a lo largo de 19 cuerda; el con- tacto con la mesa lo reemplazamos con la fuerza N, que tiene dirección perpendicular al plano inclinado; p es el peso del cuerpo 1, con dirección vertical.
AI cortar el contacto en W lo reemplazamos por la fuerza F2 con dirección vertical; P es el peso del cuer- p o 2, con dirección también vertical.
La aceleración a que experimenta el cuerpo 1 tiene dirección a lo largo del plano inclinado, mientras que la aceleración A, que experimenta el cuerpo 2, tiene dirección vertical. Los sentidos de estas aceleraciones no los conocemos. Supondremos que a tiene el senti- do mostrado en la figura 7.11. En consecuencia, como el cable es inextensible A debe tener el sentido hacia abajo. Del resultado sabremos si nuestra suposición sobre los sentidos es correcta.
Aplicamos ahora la segunda ley de Newton a cada cuerpo
cue rpo l : N + p + F1 = ma (7.25) cuerpo 2: F, + P = M A (7.26)
A continuación escogemos para cada cuerpo un sis- tema de coordenadas. En este caso los seleccionare- mos como se muestra en la figura 7.11. Nótese que ahora los escogimos diferentes para cada cuerpo.
t F 2
Figura 7.1 1

ALGUNAS APLICACIONES DE LAS LEYES DE NEWTON 135
Recuérdese que las propiedades físicas NO depen- den de la manera en que nosotros escojamos los siste- mas de coordenadas para hacer la descripción.
Tomaremos componentes a lo largo de cada eje de cada una de las últimas dos ecuaciones:
Cuerpo 1
componente x de la ec. (7.25): F l - px = ma (7.27) componente y de la ec. (7.25): N - py = O (7.28)
Cuerpo 2
componente y de la ec. (7.26): -Fz+ P= MA (7.29)
Los valores de px y p y están dados en las ecs. (7.20) y (7.21), respectivamente. Sustituyendo las ecs. (7.20) y (7.21) en las ecs. (7.27) y (7.28) obtenemos
F , - p sen O = ma (7.30) ~ - p c ~ ~ e = o (7.31)
En vista de que la cuerda tiene masa despreciable
F1 = Fz (7.32)
En cuerdas de masa despreciable las magnitudes de las tensiones se trasmiten sin disminuir, pero no así las direcciones. 1
Además, como la cuerda es inextensible, todas sus partes se aceleran de la misma manera, por lo que
a = A (7.33)
A continuación resolyeremos las ecs. (7.29)-(7.33). En primer lugar, usando las ecs. (7.32) y(7.33) así como P = Mg en la ec. (7.29) se tiene que
F , = -Ma + Mg (7.34)
que sustituyendo en la ec. (7.30) nos da, con p = mg
- Ma + Mg - mg sen O = ma
Pasando -Ma del lado derecho (pasa con signo opues- to) y factorizando a se tiene
Mg - mg sen O = ma + Ma = (m + M)a
Ahora despejamos a
Usamos el apéndice I con P = Mg - mg sen O, a = (m + M), u = a.
a= Mg - mg sen O - M - m sen O m + M m + M
- g (7.35)
Esta expresión es la magnitud de la aceleración con que se mueve el cuerpo. Por tanto, debe ser una canti- dad positiva. E l denominador de (7.35) siempre es po- sitivo. En consecuencia, el numerador debe ser tam- bién positivo
M > m sen O (7.36)
Concluimos que los sentidos de los vectores acelera- ción que seleccionamos en la figura 7.11 son los correc- tos, s i la condición (7.36) se cumple. En este caso el cuerpo 2 baja y el cuerpo 1 sube por el plano inclinado.
Observamos que las cantidades que aparecen en el lado derecho de la ec. (7.35) son constantes. En conse- cuencia, la aceleración a es constante y el movimien- to que realiza el sistema es uniformemente acelerado. Podemos describirlo según lo aprendido en la sección 4.3 del capítulo 4.
En caso de que la condición (7.36) no se cumpla, hay dos posibilidades:
i ) M < m sen 19. En este caso, el sentido del vector aceleración es hacia abajo del plano inclinado. E l cuerpo 1 baja y el cuerpo 2 sube. Se puede demostrar que ahora (véase problema 7.1 8)
a = m sen O - M
m + M g (7.37)
i i ) M = m sen O. Se tiene ahora que (véase problema 7.1 8)
a = O (7.38)
En este caso el movimiento del sistema será uniforme.. Si inicialmente el sistema está en reposo, continuará estándolo, ya que no hay aceleración; si inicialmente el sistema se estaba moviendo con cierta velocidad, continuará moviéndose con la misma velocidad.
Regresando al caso en que se cumple la condición (7.36), sustituimos la expresión (7.35) en la ec. (7.34) y usamos P = Mg.
F 1 = - M M - m sen O m + M g + Mg
Sacamos Mg como factor común c
F 1 = Mg 1 + m sen O - M 1 m + M
Combinando los términos dentro del paréntesis
m + M + m s e n O - M m + M
f 1 = Mg
y finalmente
F , = Mg m(1 + sen O) m + M (7.39)
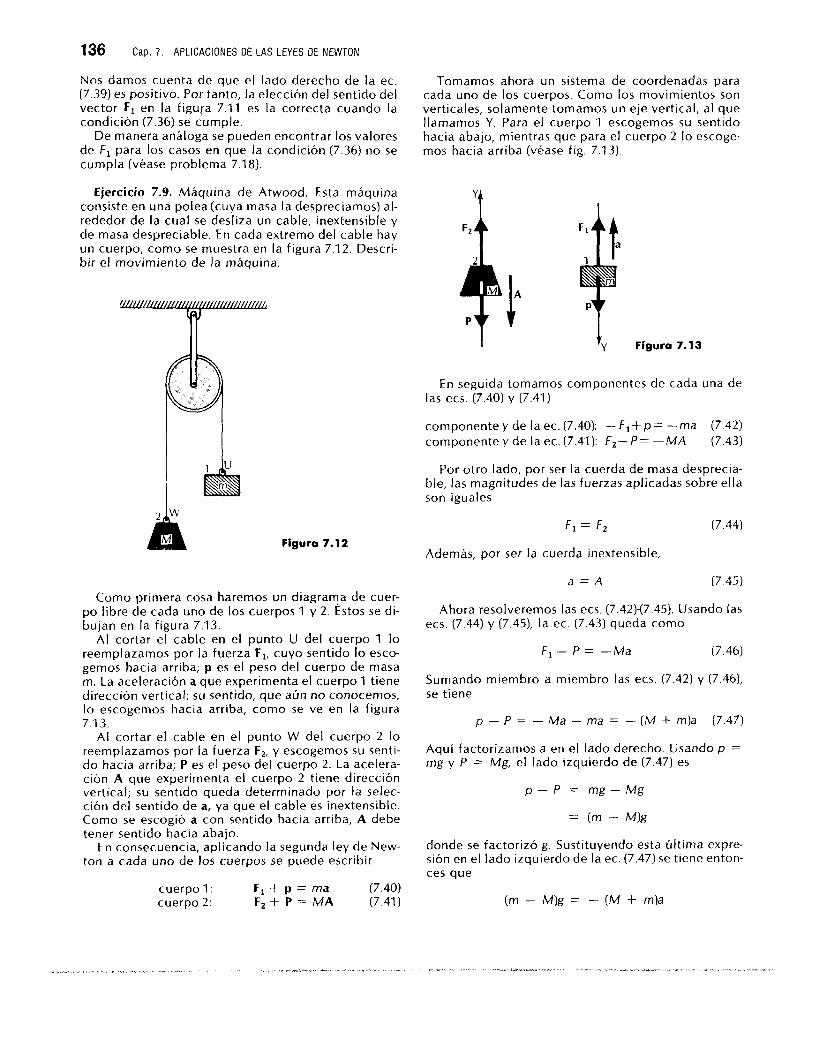
136 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
Nos damos cuenta de que el lado derecho de la ec. Tomamos ahora un sistema de coordenadas para (7.39) es positivo. Por tanto, la elección del sentido del cada uno de los cuerpos. Como los movimientos son vector F1 en la figura 7.11 es la correcta cuando la verticales, solamente tomamos un eje vertical, al que condición (7.36) se cumple. llamamos Y. Para el cuerpo 1 escogemos su sentido
De manera análoga se pueden encontrar los valores hacia abajo, mientras que para el cuerpo 2 lo escoge- de F1 para los casos en que la condición (7.36) no se mos hacia arriba (véase fig. 7.13). cumpla (véase problema 7.1 8).
Ejercicio 7.9. Máquina de Atwood. Esta máquina consiste en una polea (cuya masa la despreciamos) al- rededor de la cual se desliza un cable, inextensible y de masa despreciable. En cada extremo del cable hay un cuerpo, como se muestra en la figura 7.12. Descri- bir el movimiento de la máquina.
l l
Figura 7.12
Como primera cosa haremos un diagrama de cuer- po l ibre de cada uno de los cuerpos 1 y 2. Estos se di- bujan en la f igura 7.13.
AI cortar el cable en el punto U del cuerpo 1 lo reemplazamos por la fuerza F1, cuyo sentido lo esco- gemos hacia arriba; p es el peso del cuerpo de masa m. La aceleración a que experimenta el cuerpo 1 tiene dirección vertical; su sentido, que aún no conocemos, lo escogemos hacia arriba, como se ve en la figura 7.1 3.
AI cortar el cable en el punto W del cuerpo 2 lo reemplazamos por la fuerza Fa, y escogemos su senti- do hacia arriba; P es el peso del cuerpo 2. La acelera- ción A que experimenta el cuerpo 2 tiene dirección vertical; su sentido queda determinado por la selec- ción del sentido de a, ya que el cable es inextensible. Como se escogió a con sentido hacia arriba, A debe tener sentido hacia abajo.
En consecuencia, aplicando la segunda ley de New- ton a cada uno de los cuerpos se puede escribir
cuerpo 1 : F , + p = m a (7.40) cuerpo 2: F , + P = M A (7.41)
1 ty Figura 7.13
En seguida tomamos componentes de cada una de las ecs. (7.40) y (7.41)
componente y de la ec. (7.40): - F , + p = -ma (7.42) componente y de la ec. (7.41): F,“P= - M A (7.43)
Por otro lado, por ser la cuerda de masa desprecia- ble, las magnitudes de las fuerzas aplicadas sobre ella son iguales
Además, por ser la cuerda inextensible,
a = A (7.45)
Ahora resolveremos las ecs. (7.42)-(7.45). Usando las ecs. (7.44) y (7.451, la ec. (7.43) queda como
F1- P = -Ma (7.46)
Sumando miembro a miembro las ecs. (7.42) y (7.46), se tiene
D - P = - M a - ma = - ( M + m)a (7.47)
Aquí factorizamos a en el lado derecho. Usando p = mg y P = Mg, el lado izquierdo de (7.47) es
p - P = m g - ” g
= (m - M)g
donde se factorizó g. Sustituyendo esta última expre- sión en el lado izquierdo de la ec. (7.47) se tiene enton- ces que
(m - M)g = - ( M + m)a
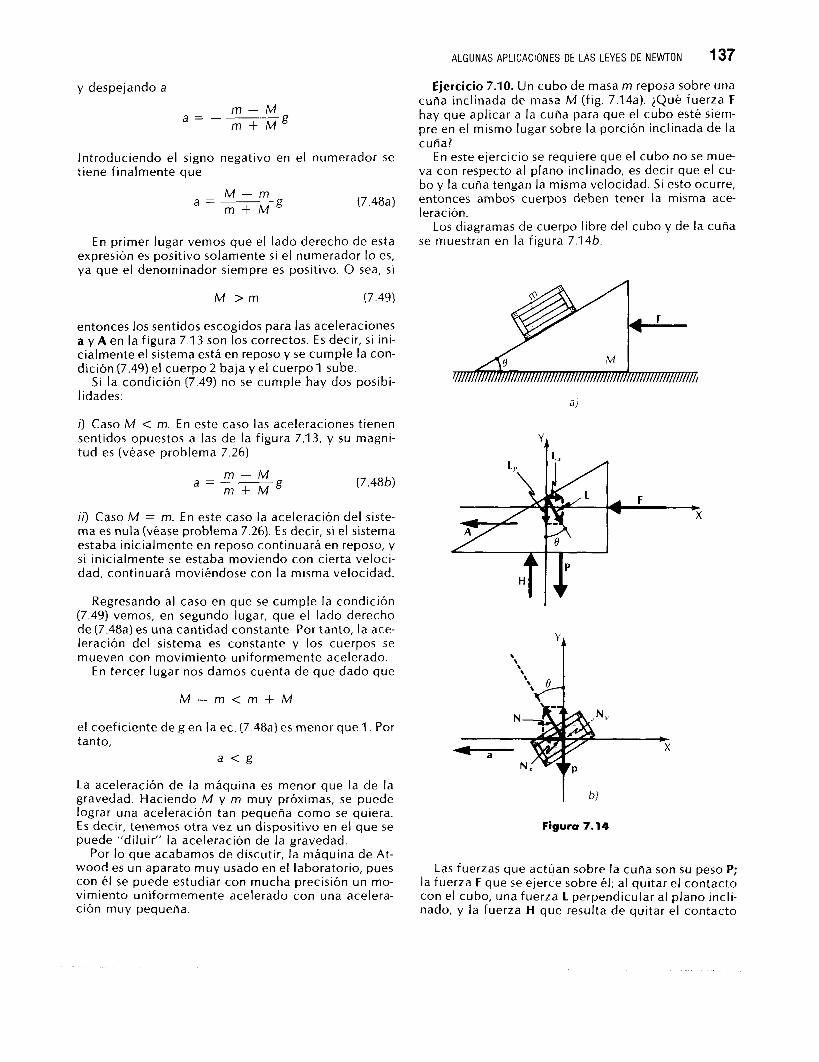
ALGUNAS APLICACIONES DE LAS LEYES DE NEWTON 137
y despejando a
a = - m - M m + M~
Introduciendo el signo negativo en el numerador se tiene finalmente que
a = M - m m + M g
(7.48a)
En primer lugar vemos que el lado derecho de esta expresión es positivo solamente s i el numerador lo es, ya que el denominador siempre es positivo. O sea, s i
M > m (7.49)
entonces los sentidos escogidos para las aceleraciones a y A en la figura 7.1 3 son los correctos. Es decir, s i ini- cialmente el sistema está en reposo y se cumple la con- dición (7.49) el cuerpo 2 baja y el cuerpo 1 sube.
Si la condición (7.49) no se cumple hay dos posibi- lidades:
i ) Caso M < m. En este caso las aceleraciones tienen sentidos opuestos a las de la figura 7.13, y su magni- tud es (véase problema 7.26)
a = m - M m + M g
(7.48b)
i i ) Caso M = m. En este caso la aceleración del siste- ma es nula (véase problema 7.26). Es decir, s i el sistema estaba inicialmente en reposo continuará en reposo, y s i inicialmente se estaba moviendo con cierta veloci- dad, continuará moviéndose con la misma velocidad.
Regresando al caso en que se cumple la condición (7.49) vemos, en segundo lugar, que el lado derecho de (7.48a) es una cantidad constante. Por tanto, la ace- leración del sistema es constante y los cuerpos se mueven con movimiento uniformemente acelerado.
En tercer lugar nos damos cuenta de que dado que
M - m < m + M
el coeficiente de g en la ec. (7.48a) es menor que 1. Por tanto,
a < g
La aceleración de la máquina es menor que la de la gravedad. Haciendo M y m muy próximas, se puede lograr una aceleración tan pequeña como se quiera. Es decir, tenemos otra vez un dispositivo en el que se puede "diluir" la aceleración de la gravedad.
Por lo que acabamos de discutir, la máquina de At- wood es un aparato muy usado en el laboratorio, pues con éI se puede estudiar con mucha precisión un mo- vimiento uniformemente acelerado con una acelera- ción muy pequeña.
Ejercicio 7.10. Un cubo de masa m reposa sobre una cuña inclinada de masa M (fig. 7.14a). jQué fuerza F hay que aplicar a la cuña para que el cubo esté siem- pre en el mismo lugar sobre la porción inclinada de la cuña?
En este ejercicio se requiere que el cubo no se mue- va con respecto al plano inclinado, es decir que el cu- bo y la cuña tengan la misma velocidad. Si esto ocurre, entonces ambos cuerpos deben tener la misma ace- leración.
Los diagramas de cuerpo libre del cubo y de la cuña se muestran en la figura 7.14b.
'A
'. 't
Figura 7.14
Las fuerzas que actuan sobre la cuña son su peso P; la fuerza F que se ejerce sobre éI; al quitar el contacto con el cubo, una fuerza L perpendicular al plano incli- nado, y la fuerza H que resulta de quitar el contacto
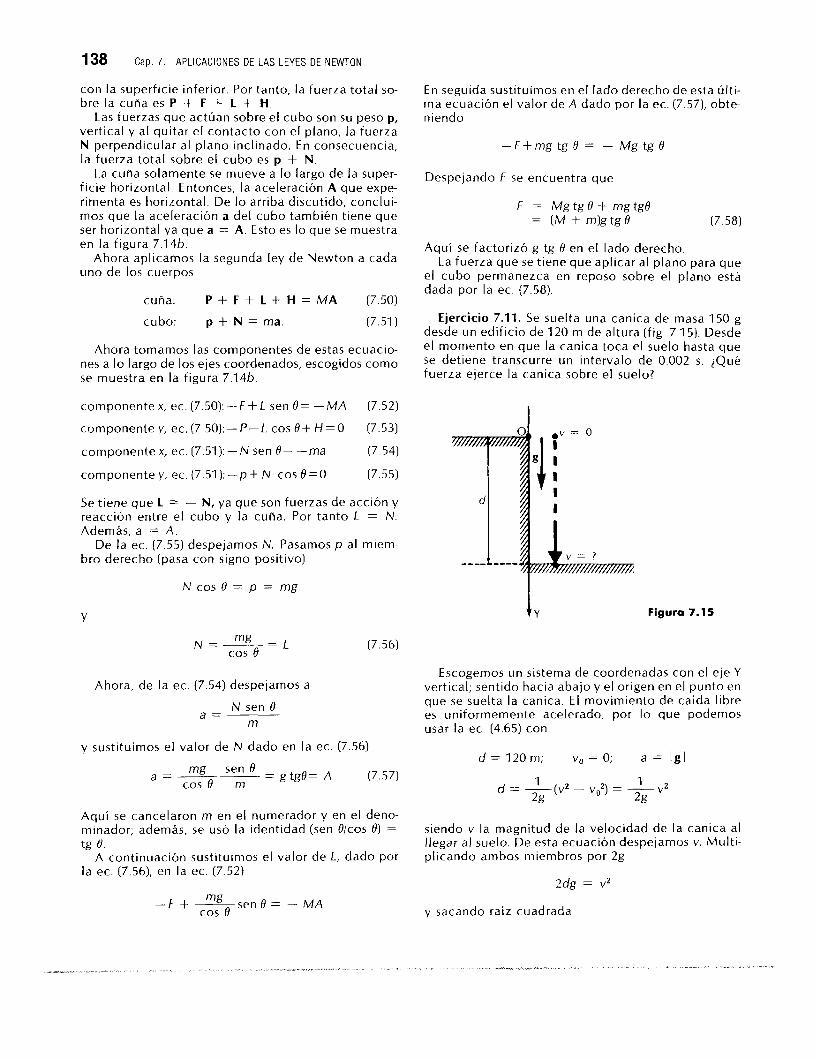
138 cap . 7. APLICACIONES DE LAS LEYES DE NEWTON
con la superficie inferior. Por tanto, la fuerza total so- bre la cuña es P + F + l + H .
Las fuerzas que actúan sobre el cubo son su peso p, vertical y al quitar el contacto con el plano, la fuerza N perpendicular al plano inclinado. En consecuencia, la fuerza total sobre el cubo es p + N.
La cuña solamente se mueve a lo largo de la super- ficie horizontal. Entonces, la aceleración A que expe- rimenta es horizontal. De lo arriba discutido, conclui- mos que la aceleración a del cubo también t iene que ser horizontal ya que a = A. Esto es lo que se muestra en la figura 7.14b.
Ahora aplicamos la segunda ley de Newton a cada uno de los cuerpos
cuña: P + F + 1 + H = M A (7.50)
cubo: p + N = ma. (7.51)
Ahora tomamos las componentes de estas ecuacio- nes a lo largo de los ejes coordenados, escogidos como se muestra en la figura 7.14b.
componentex, ec. (7.50):"F-tL sen O = - M A (7.52)
componente y, ec. (7.5O):"P-L cos O+ H = O (7.53)
componente x, ec. (7.51): - N sen O = -ma (7.54)
componente y, ec. (7.51):-p+ N cos 8=0 (7.55)
Se tiene que 1 = - N, ya que son fuerzas de acción y reacción entre el cubo y la cuña. Por tanto L = N. Además, a = A.
De la ec. (7.55) despejamos N. Pasamos p al miem- bro derecho (pasa con signo positivo)
N cos 0 = p = mg
Y
Ahora, de la ec. (7.54) despejamos a
a = N sen 6
m
y sustituimos el valor de N dado en la ec. (7.56)
En seguida sustituimos en el lado derecho de esta últi- ma ecuación el valor de A dado por la ec. (7.57), obte- niendo
- ~ + m g tg a = - Mg tg e
Despejando F se encuentra que
F = Mgtge+ mgtge = ( M + m)gtgB (7.58)
Aquí se factorizó g tg 0 en el lado derecho. La fuerza que se tiene que aplicar al plano para que
el cubo permanezca en reposo sobre el plano está dada por la ec. (7.58).
Ejercicio 7.11. Se suelta una canica de masa 150 g desde un edificio de 120 m de altura (fig. 7.15). Desde el momento en que la canica toca el suelo hasta que se detiene transcurre un intervalo de 0.002 s. iQué fuerza ejerce la canica sobre el suelo?
a=--- mg sen e cos 0 rn
- gtgO= A (7.57)
+ Y Figura 7.15
(7.56)
Aquí se cancelaron m en el numerador y en el deno- minador; además, se usó la identidad (sen @/cos e) = tg e.
A continuación sustituimos el valor de L, dado por la ec. (7.56), en la ec. (7.52)
"F + ~ rng sen O = - MA cos e
Escogemos un sistema de coordenadas con el eje Y vertical; sentido hacia abajo y el origen en el punto en que se suelta la canica. E l movimiento de caída libre es uniformemente acelerado, por lo que podemos usar la ec. (4.65) con
d = 120m; v u = O; a = / g /
siendo v la magnitud de la velocidad de la canica al llegar al suelo. D e esta ecuación despejamos v. Mult i - plicando ambos miembros por 2g
2dg = v2
y sacando raíz cuadrada
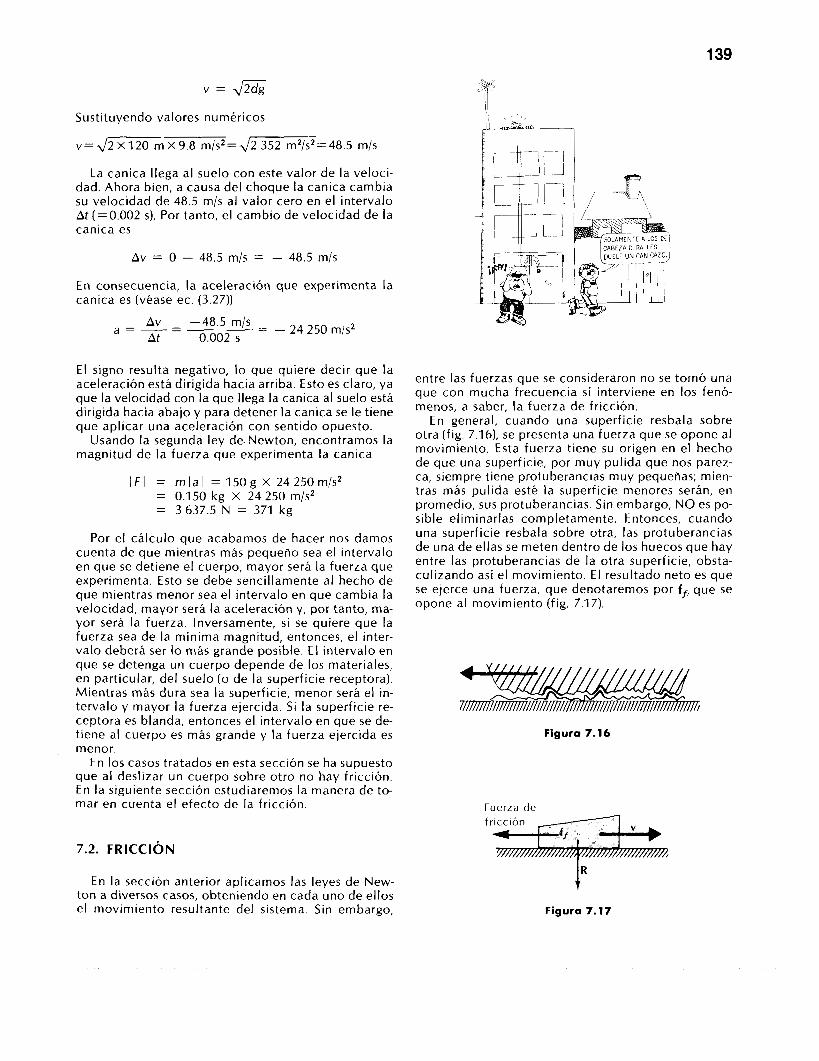
1 39
v = a
Sustituyendo valores numéricos
v= 4 2 X 120 m X 9.8 mlsZ= 48.5 mls
La canica llega al suelo con este valor de la veloci- dad. Ahora bien, a causa del choque la canica cambia su velocidad de 48.5 m/s al valor cero en el intervalo At (= 0.002 S ) . Por tanto, el cambio de velocidad de la canica es
Av = O - 48.5 mis = - 48.5 mls
En consecuencia, la aceleración que experimenta la canica es (véase ec. (3.27))
a = - - Av - -48.5 mis At 0.002 S
= - 24 250 mis2
E l signo resulta negativo, lo que quiere decir que la aceleración está dirigida hacia arriba. Esto es claro, ya que la velocidad con la que llega la canica al suelo está dirigida hacia abajo y para detener la canica se le tiene que aplicar una aceleración con sentido opuesto.
Usando la segunda ley de. Newton, encontramos la magnitud de la fuerza que experimenta la canica
IF1 = m l a l = 1 5 0 g X 24250mls' = 0.150 kg X 24 250 m/sZ = 3 637.5 N = 371 kg
Por el cálculo que acabamos de hacer nos damos cuenta de que mientras más pequeno sea el intervalo en que se detiene el cuerpo, mayor será la fuerza que experimenta. Esto se debe sencillamente al hecho de que mientras menor sea el intervalo en que cambia la velocidad, mayor será la aceleración y, por tanto, ma- yor será la fuerza. Inversamente, s i se quiere que la fuerza sea de la mínima magnitud, entonces, el inter- valo deberá ser lo más grande posible. E l intervalo en que se detenga un cuerpo depende de los materiales, en particular, del suelo (o de la superficie receptora). Mientras más dura sea la superficie, menor será el in- tervalo y mayor la fuerza ejercida. Si la superficie re- ceptora es blanda, entonces el intervalo en que se de- tiene al cuerpo es más grande y la fuerza ejercida es menor.
En los casos tratados en esta sección se ha supuesto que al deslizar un cuerpo sobre otro no hay fricción. En la siguiente sección estudiaremos la manera de to- mar en cuenta el efecto de la fricción,
7.2. F R I C C I ~ N
En la sección anterior aplicamos las leyes de New- ton a diversos casos, obteniendo en cada uno de ellos el movimiento resultante del sistema. Sin embargo,
1
i 1". 1 / \
entre las fuerzas que se consideraron no se tomó una que con mucha frecuencia sí interviene en los fenó- menos, a saber, la fuerza de fricción.
En general, cuando una superficie resbala sobre otra (fig. 7.16), se presenta una fuerza que se opone al movimiento. Esta fuerza tiene su origen en el hecho de que una superficie, por muy pulida que nos parer- ca, siempre tiene protuberancias muy pequeñas; mien- tras más pulida esté la superficie menores serán, en promedio, sus protuberancias. Sin embargo, NO es po- sible eliminarlas completamente. Entonces, cuando una superficie resbala sobre otra, las protuberancias de una de ellas se meten dentro de los huecos que hay entre las protuberancias de la otra superficie, obsta- culizando así el movimiento. E l resultado neto es que se ejerce una fuerza, que denotaremos por ff, que se opone al movimiento (f ig. 7.17).
Figura 7.16
Fuerza de
1" Figura 7.17
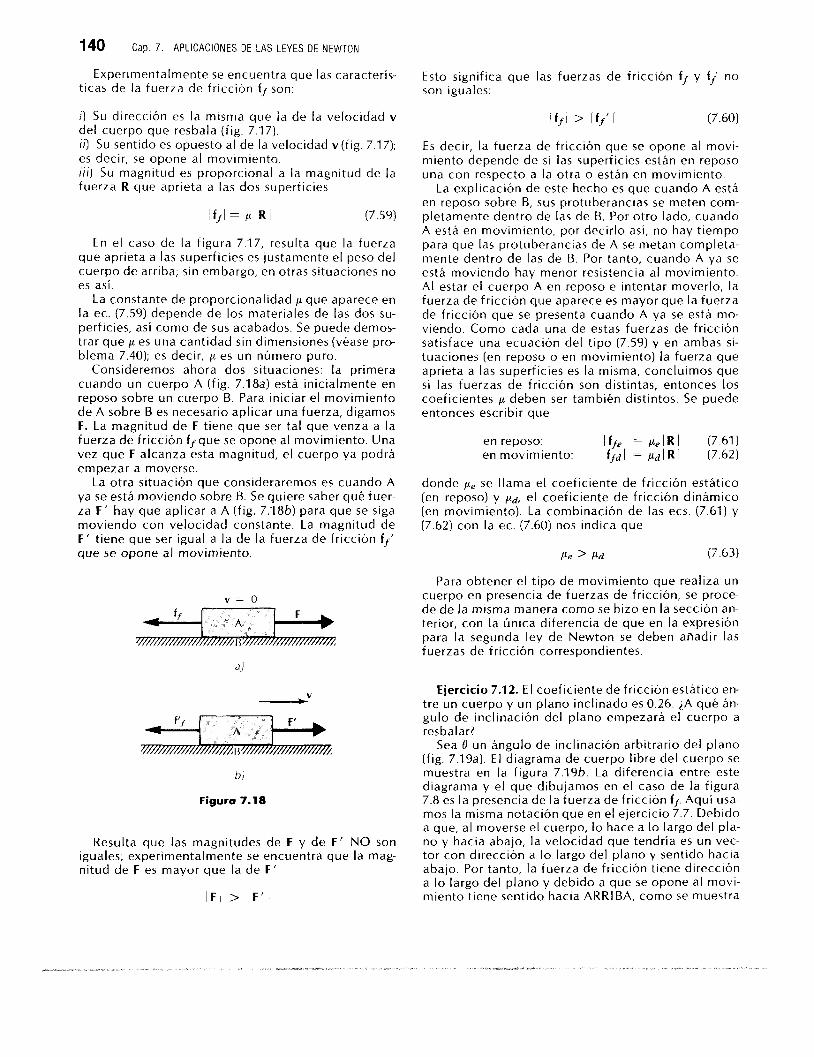
140 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
Experimentalmente se encuentra que las caracterís- ticas de la fuerza de fricción ff son:
i f Su dirección es la misma que la de la velocidad v del cuerpo que resbala (fig. 7.17). ii) Su sentido es opuesto al de la velocidad v (fig. 7.1 7); es decir, se opone al movimiento. i i i ) Su magnitud es proporcional a la magnitud de la fuerza R que aprieta a las dos superficies
p I R / (7.59)
En el caso de la figura 7.17, resulta que la fuerza que aprieta a las superficies es justamente el peso del cuerpo de arriba; sin embargo, en otras situaciones no es así.
La constante de proporcionalidad p qcre aparece en la ec. (7.59) depende de los materiales de las dos su- perficies, así como de sus acabados. Se puede demos- trar que p es una cantidad sin dimensiones (véase pro- blema 7.40); es decir, p es un número puro.
Consideremos ahora dos situaciones: la primera cuando un cuerpo A (fig. 7.18a) está inicialmente en reposo sobre un cuerpo B. Para iniciar el movimiento de A sobre B es necesario aplicar una fuerza, digamos F. La magnitud de F tiene que ser tal que venza a la fuerza de fricción ffque se opone al movimiento. Una vez que F alcanza esta magnitud, el cuerpo va podrá empezar a moverse.
La otra situación que consideraremos es cuando A ya se está moviendo sobre B. Se quiere saber qué fuer- za F’ hay que aplicar a A (fig. 7.18b) para que se siga moviendo con velocidad constante. La magnitud de F ’ t iene que ser igual a la de la fuerza de fricción ff’ que se opone al movimiento.
Figura 7.18
Resulta que las magnitudes de F y de F’ NO son iguales; experimentalmente se encuentra que la mag- nitud de F es mayor que la de F ‘
I F 1 > IF’I
Esto significa que las fuerzas de fricción ff y f i no son iguales:
I f f i > I f f ’ I (7.60)
Es decir, la fuerza de fricción que se opone al movi- miento depende de si las superficies están en reposo una con respecto a la otra o están en movimiento.
La explicación de este hecho es que cuando A está en reposo sobre B, sus protuberancias se meten com- pletamente dentro de las de B. Por otro lado, cuando A está en movimiento, por decirlo así, no hay t iempo para que las protuberancias de A se metan completa- mente dentro de las de B. Por tanto, cuando A ya se está moviendo hay menor resistencia al movimiento. AI estar el cuerpo A en reposo e intentar moverlo, la fuerza de fricción que aparece es mayor que la fuerza de fricción que se presenta cuando A ya se está mo- viendo. Como cada una de estas fuerzas de fricción satisface una ecuación del tipo (7.59) y en ambas si- tuaciones (en reposo o en movimiento) la fuerza que aprieta a las superficies es la misma, concluimos que s i las fuerzas de fricción son distintas, entonces los coeficientes p deben ser también distintos. Se puede entonces escribir que
en reposo: I f f e I = PeIRI (7.61) en movimiento: 1 ffdI = pdl R I (7.62)
donde pe se llama el coeficiente de fricción estático [en reposo) y pd, el coeficiente de fricción dinámico (en movimiento). La combinación de las ecs. (7.61) y (7.62) con la ec. (7.60) nos indica que
@e > pd (7.63)
Para obtener el tipo de movimiento que realiza un cuerpo en presencia de fuerzas de fricción, se proce- de de la misma manera como se hizo en la sección an- terior, con la única diferencia de que en la expresión para la segunda ley de Newton se deben añadir las fuerzas de fricción correspondientes.
Ejercicio 7.12. E l coeficiente de fricción estático en- tre un cuerpo y un plano inclinado es 0.26. i A qué án- gulo de inclinación del plano empezará el cuerpo a resbalar?
Sea 8 un ángulo de inclinación arbitrario del plano (fig. 7.19a). E l diagrama de cuerpo libre del cuerpo se muestra en la figura 7.19b. La diferencia entre este diagrama y el que dibujamos en el caso de la figura 7.8 es la presencia de la fuerza de fricción ff Aquí usa- mos la misma notación que en el ejercicio 7.7. Debido a que, al moverse el cuerpo, lo hace a lo largo del pla- no y hacia abajo, la velocidad que tendría es un vec- tor con dirección a lo largo del plano y sentido hacia abajo. Por tanto, la fuerza de fricción tiene dirección a lo largo del plano y debido a que se opone al movi- miento tiene sentido hacia ARRIBA, como se muestra
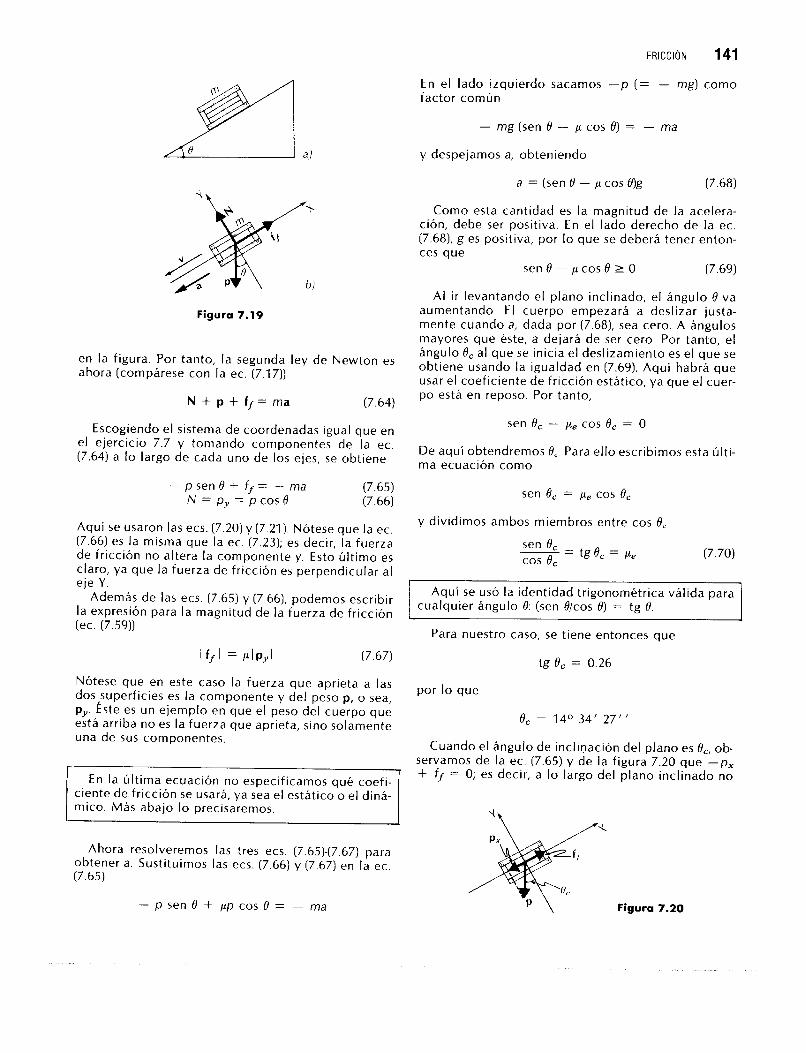
FRICCION 141 En el lado izquierdo sacamos "p (= - mg) como factor común
- mg (sen 8 - p cos 8) = - ma
Figura 7.19
en la figura. Por tanto, la segunda ahora (compárese con la ec. (7.17))
bl
ley de Newton es
N + p + f f = m a (7.64)
Escogiendo el sistema de coordenadas igual que en el ejercicio 7.7 y tomando componentes de la ec. (7.64) a lo largo de cada uno de los ejes, se obtiene
- p s e n O + f f = - m a (7.65) N = py = p cos 8 (7.66)
Aquí se usaron las ecs. (7.20) y (7.21). Nótese que la ec. (7.66) es la misma que la ec. (7.23); es decir, la fuerza de fricción no altera la componente y. Esto úl t imo es claro, ya que la fuerza de fricción es perpendicular al eje Y.
Además de las ecs. (7.65) y (7.661, podemos escribir la expresión para la magnitud de la fuerza de fricción (ec. (7.59))
I f f 1 = PIPy / (7.67)
Nótese que en este caso la fuerza que aprieta a las dos,superficies es la componente y del peso p, o sea, p,,. Este es un ejemplo en que el peso del cuerpo que está arriba no es la fuerza que aprieta, sino solamente una de sus componentes.
y despejamos a, obteniendo
a = (sen 8 - p cos 8)g (7.68)
Como esta cantidad es la magnitud de la acelera- ción, debe ser positiva. En el lado derecho de la ec. (7.68), g es positiva, por lo que se deberá tener enton- ces que
s e n 8 - p c o s 8 2 0 (7.69)
AI ir levantando el plano inclinado, el ángulo 8 va aumentando. E l cuerpo empezará a deslizar justa- mente cuando a, dada por (7.68), sea cero. A ángulos mayores que éste, a dejará de ser cero. Por tanto, el ángulo 8, al que se inicia el deslizamiento es el que se obtiene usando la igualdad en (7.69). Aquí habrá que usar el coeficiente de fricción estático, ya que el cuer- po está en reposo. Por tanto,
sen 8, - pe cos 8, = 0
De aquí obtendremos O,. Para ello escribimos esta últi- ma ecuación como
sen BC = pe cos 8,
y dividimos ambos miembros entre cos 8,
(7.70)
Aquí se usó la identidad trigonométrica válida para cualquier ángulo 8: (sen 8icos 81 = tg 8.
~~ ~~
Para nuestro caso, se tiene entonces que
tg OC = 0.26
por lo que
8, = 14O 34' 27"
Cuando el ángulo de inclinación del plano es O,, ob- servamos de la&. (7.65) y de la figura 7.20 que -px + ff = O; es decir, a lo largo del plano inclinado no En la última ecuación no especificamos qué coefi-
ciente de fricción se usará, ya sea el estático o el diná- mico. Más abajo lo precisaremos.
Ahora resolveremos las tres ecs. (7.65)-(7.67) para obtener a. Sustituimos las ecs. (7.66) y (7.67) en la ec. (7.65)
- p sen 8 + pp cos 8 = - ma Figura 7.20
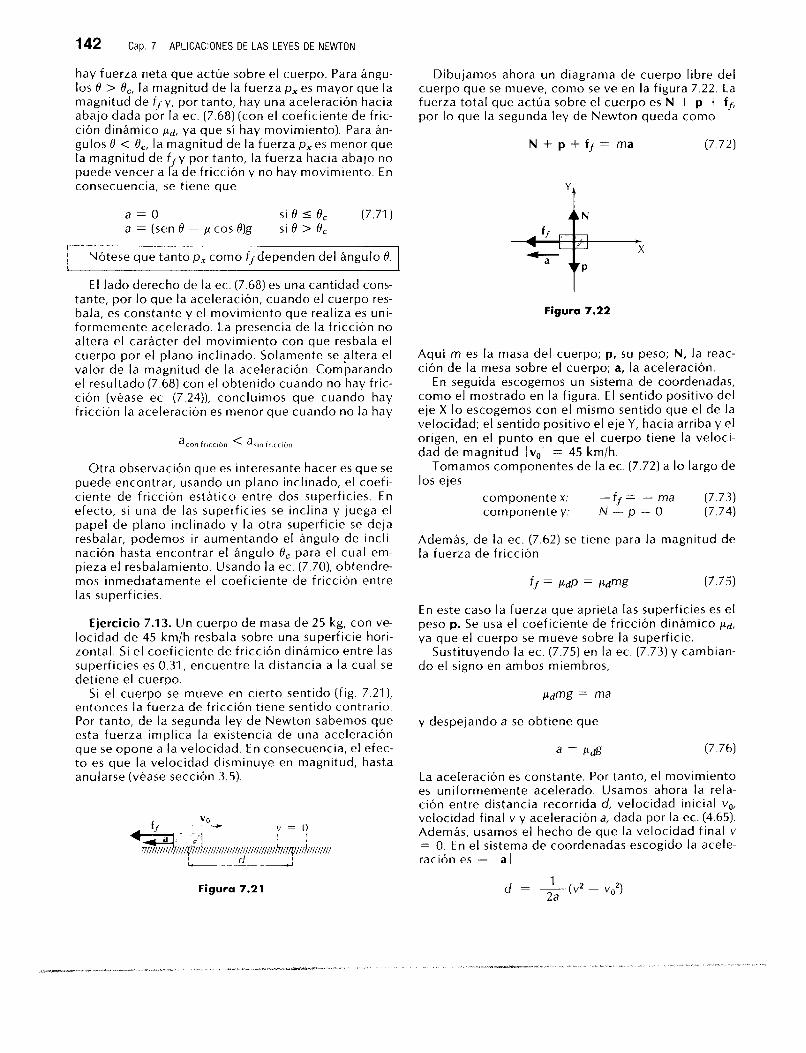
142 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
hay fuerza neta que actúe sobre el cuerpo. Para ángu- los 0 > e,, la magnitud de la fuerza p x es mayor que la magnitud de ffy, por tanto, hay una aceleración hacia abajo dada por la ec. (7.68) (con el coeficiente de fric- ción dinámico ,Ud, ya que sí hay movimiento). Para án- gulos 0 < O,, la magnitud de la fuerza p x es menor que la magnitud de ff y por tanto, la fuerza hacia abajo no puede vencer a la de fricción y no hay movimiento. En consecuencia, se tiene que
a = O s i 0 5 0, (7.71) a = (sen 0 - p cos O)g s i O > 0,
I Nótese que tanto p x como f fdependen de l ángu loq
E l lado derecho de la ec. (7.68) es una cantidad cons- tante, por lo que la aceleración, cuando el cuerpo res- bala, es constante y el movimiento que realiza es uni- formemente acelerado. La presencia de la fricción no altera el carácter del movimiento con que resbala el cuerpo por el plano inclinado. Solamente se altera el valor de la magnitud de la aceleración. Comparando el resultado (7.68) con el obtenido cuando no hay fric- ción (véase ec. (7.24)), concluimos que cuando hay fricción la aceleración es menor que cuando no la hay
acon frtcclbn < a,," t r lcc lhn
Otra observación que es interesante hacer es que se puede encontrar, usando un plano inclinado, el coefi- ciente de fricción estático entre dos superficies. En efecto, si una de las superficies se inclina y juega el papel de plano inclinado y la otra superficie se deja resbalar, podemos ir aumentando el ángulo de incli- nación hasta encontrar el ángulo Oc para el cual em- pieza el resbalamiento. Usando la ec. (7.701, obtendre- mos inmediatamente el coeficiente de fricción entre las superficies.
Ejercicio 7.13. Un cuerpo de masa de 25 kg, con ve- locidad de 45 km/h resbala sobre una superficie hori- zontal. Si el coeficiente de fricción dinámico entre las superficies es 0.31, encuentre la distancia a la cual se detiene el cuerpo.
S i el cuerpo se mueve en cierto sentido (fig. 7.211, entonces la fuerza de fricción tiene sentido contrario. Por tanto, de la segunda ley de Newton sabemos que esta fuerza implica la existencia de una aceleración que se opone a la velocidad. En consecuencia, el efec- t o es que la velocidad disminuye en magnitud, hasta anularse (véase sección 3.5).
Figura 7.21
Dibujamos ahora un diagrama de cuerpo libre del cuerpo que se mueve, como se ve en la figura 7.22. La fuerza total que actúa sobre el cuerpo es N + p + ff, por lo que la segunda ley de Newton queda como
N + p + f f = m a (7.72)
't ;4:i cg
Figura 7.22
Aquí m es la masa del cuerpo; p, su peso; N, la reac- ción de la mesa sobre el cuerpo; a, la aceleración.
En seguida escogemos un sistema de coordenadas, como el mostrado en la figura. E l sentido positivo del eje X lo escogemos con el mismo sentido que el de la velocidad; el sentido positivo el eje Y, hacia arriba y el origen, en el punto en que el cuerpo tiene la veloci- dad de magnitud I v o / = 45 km/h.
Tomamos componentes de la ec. (7.72) a lo largo de los ejes
componente x: -ff = - ma (7.73) componente y: N - p = O (7.74)
Además, de la ec. (7.62) se tiene para la magnitud de la fuerza de fricción
En este caso la fuerza que aprieta las superficies es el peso p. Se usa el coeficiente de fricción dinámico pd, ya que el cuerpo se mueve sobre la superficie.
Sustituyendo la ec. (7.75) en la ec. (7.73) y cambian- do el signo en ambos miembros,
pdmg = ma
y despejando a se obtiene que
a = Pdg (7.76)
La aceleración es constante. Por tanto, el movimiento es uniformemente acelerado. Usamos ahora la rela- ción entre distancia recorrida d, velocidad inicial vo, velocidad final v y aceleración a, dada por la ec. (4.65). Además, usamos el hecho de que la velocidad final v = O. En el sistema de coordenadas escogido la acele- ración es - la1
1 2a d = -(vZ - VOZ)

F R I C C I ~ N 143
(7.77)
Aquí se usó para la I su valor dado por la ec. (7.76). Sustituyendo los valores numéricos se encuentra que (en el SI vo = 45 km/h = 12.5 mis)
d = (1 2.5 rnls), 2 X 0.31 X 9.8 m/sZ
- - 156.25 m2/s2 = 25,72 m 6.076 m/s2
De la ec. (7.77) vemos que la distancia d recorrida es proporcional al cuadrado de la velocidad inicial. Mientras mayor sea esta velocidad, mayor será la dis- tancia d. Este resultado lo conocemos de nuestra ex- periencia diaria. Sin embargo, la ec. (7.77) nos dice más: a una velocidad doble, el cuerpo se detiene a una distancia cuatro veces mayor; a una velocidad tri- ple, se detiene a una distancia nueve veces mayor, etc.
La ec. (7.77) también nos dice que la distancia d de- pende inversamente del coeficiente de fricción p d : mientras mayor sea pd, menor será d, e inversamente. Esto es claro, pues mientras más rugosas sean las superfi- cies, la distancia recorrida por el cuerpo será menor, e inversamente. En el caso extremo en que las superfi- cies resbalen muy bien una sobre otra, o sea, cuando el coeficiente de fricción es muy pequeño, entonces vemos que la distancia d recorrida es muy grande. A medida que pd sea más y más pequeño, d será más y más grande. En el l ímite en que p d - O , la distancia d-+oo. La interpretación física de este resultado, apa- rentemente extraño, es que s i pd tiende a cero, enton- ces de la ec. (7.59) vemos que la fuerza de fricción también tiende a cero. E s decir, horizontalmente no hay fuerza alguna actuando sobre el cuerpo. La pri- mera ley de Newton nos dice que entonces el cuerpo se moverá todo el t iempo con la misma velocidad ho- rizontal v,,, y por tanto, la distancia recorrida será infi- nita. E l cuerpo no se detiene, ya que en este caso nada se opone a su movimiento. Nótese que las únicas fuer- zas que actúan sobre el cuerpo serían N y p, que son perpendiculares a la dirección del movimiento. De acuerdo con el Principio de Superposición, estas fuer- zas no afectan el movimiento horizontal.
La existencia del fenómeno de fricción tiene, en ciertas circunstancias, desventajas y en otras situacio- nes, ventajas.
Un ejemplo de situación desventajosa de la fricción es el caso de los motores. Cuando dos de sus superfi- cies en contacto resbalan una sobre la otra (por ejem- plo, un eje que gira descansando sobre un cojinete), la fricción que se manifiesta impide, por un lado, el mo-
vimiento, causando un aumento de temperatura. Si no se evita este aumento, la temperatura puede llegar a un valor en que una o las dos superficies empiecen a derretirse, perjudicándose el motor. Por otro lado, al resbalar una superficie sobre otra, sus protuberancias chocan unas contra otras, ocasionando que se rom- pan; es decir, la superficie sufre un desgaste. Se pue- den evitar, en cierta medida, estas consecuencias Iu- bricando las superficies. Esto significa colocar una pe- lícula de algún líquido (aceite es el usual) entre las su- perficies, de tal modo que no estén en contacto, sino que se muevan con el lubricante entre ellas. De esta manera, el efecto de la fricción se minimiza. Des- afortunadamente no se puede eliminar por completo.
Un ejemplo en el que la fricción es ventajosa es cuando caminamos (fig. 7.23). AI caminar, las protube- rancias de nuestros zapatos se meten dentro de las protuberancias del suelo, y al impulsarnos hacia ade- lante ejercemos, a través de las protuberancias, una fuerza F , sobre la Tierra. De la tercera ley de Newton, la Tierra reacciona y ejerce una fuerza F 2 sobre no- sotros. Es esta fuerza F, la que hace que nos mova- mos. S i el suelo es muy liso, por ejemplo, s i es hielo o una superficie mojada, entonces casi no hay fricción.
Figura 7.23
En este caso, las protuberancias de nuestros zapatos casi no se meten entre las de la superficie, y la fuerza F , que ejercemos sobre la Tierra es de magnitud pe- queña. Por tanto, la Tierra reacciona ejerciendo sobre nosotros una fuerza F, también de magnitud pequeña. E l resultado neto es que nos es difícil caminar sobre este tipo de superficies.
Otra aplicación ventajosa de la fricción es en el me- canismo de frenos de un vehículo automotor (véase problema 7.46).
Ejercicio 7.14. Se aprieta un cuerpo que pesa 30 kg contra una pared, como se muestra en la f ig. 7.24~. S i el coeficiente de fricción estático entre el cuerpo y la pared es de 1.25, jcuál es la mínima magnitud de la fuerza F, horizontal, que hay que aplicar para que el cuerpo no caiga?
En primer lugar dibujamos un diagrama de cuerpo libre del cuerpo (fig. 7.24b). Las fuerzas que actúan so- bre éI son: la fuerza F que empuja al cuerpo sobre la pared; al separar el contacto con la pared lo reempla- zamos con una fuerza N, horizontal; el peso P, verti-
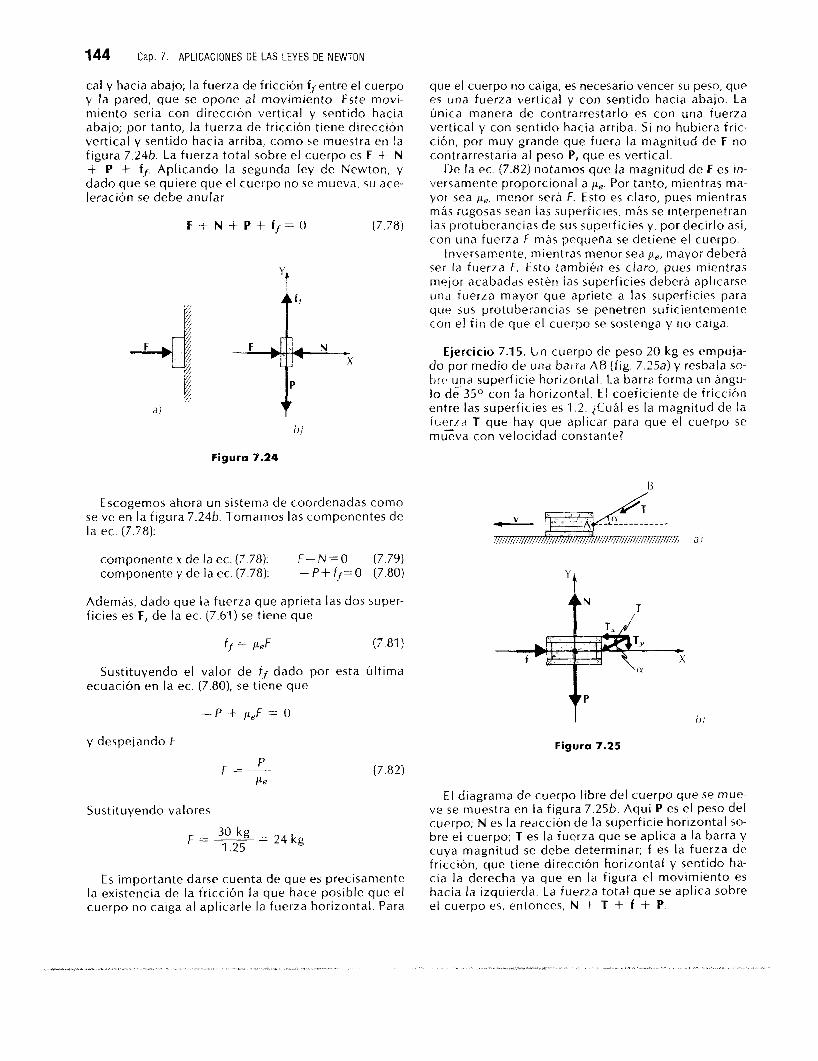
144 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
cal y hacia abajo; la fuerza de fricción ffentre el cuerpo y la pared, que se opone al movimiento. Este movi- miento sería con dirección vertical y sentido hacia abajo; por tanto, la fuerza de fricción tiene direccibrl vertical y sentido hacia arriba, como se muestra en la figura 7.246. La fuerza total sobre el cuerpo es F i N + P + f,f. Aplicando la segunda ley de Newton, y dado que se quiere que el cuerpo no se mueva. su ace- leración se dehe anular
F + N + P + f f = O V.78j
a ;
il!
Figura 7.24
Escogemos ahora un sistema de coordenadas como se ve en la figura 7.246. Tornamos las componentes de la ec. (7.78):
componente x de la ec. (7.78): F "N = O (7.79) componente y de la ec. (7.78): - P f f f = O (7.80)
Además, dado que la fuerza que aprieta las dos super- ficies es F, de la ec. (7.61) se tiene que
ff = peF (7.81)
Sustituyendo el valor de ff dado por esta última ecuación en la ec. (7.80), se tiene que
"P + peF O
y despejando F
P Pe
f=- (7.82)
Sustituyendo valores
Es importante darse cuenta de que es precisamente la existencia de la fricción la que hace posible que el cuerpo no caiga al aplicarle la fuerza horizontal. Para
que el cuerpo no caiga, es necesario vencer su peso, q ~ ~ e es una fuerza vertical y con sentido hacia abajo. La ljnica manera de contrarrestarlo es con una tuerza vertical y con sentido hacia arriba. S i no hubiera fric- ción, por muy grande que fuera la magnitud de F no contrarrestaría al peso P, que es vertical.
De la ec. (7.82) notamos que la magnitud de F es in- versamente proporcional a pe. Por tanto, mientras ma- yor sea y,, menor será f. Esto es claro, pues mientras más rugosas sean ¡as superficies, más se interpenetran las protuberancias de sus superficies y, por decirlo así, con una fuerza F más pequeña se detiene el cuerpo.
t nversarnente, mientras menor sed p,, mayor deberá ser Id fuerza f . Esto también es cidro, pues mientras mejor acabadas estén las superficies deberá aplicarse 1.ln~1 tuerza mayor que apriete a las superficies para que jus protuberancias se penetren suticientemente con el f in de que el cuerpo se sostenga y no caiga.
Ejercicio 7.15. Un cuerpo de peso 20 kg es empuja- do por medio de una baira A B (fig. 7.25a) y resbala SQ- h r r una superficie horizontal. La barra forma un ángu- lo d e 350 con la horizontal. E l coeficiente de fricción entre las superficies es 1.2. &uá1 es la magnitud de la íuc:r/n T que hay que aplicar para que el cuerpo se mueva con velocidad constante?
't
Figura 7.25
E l diagrama de cuerpo libre del cuerpo que se mue- ve se muestra en la figura 7.256. Aquí P es el peso del cuerpo; N es la reacción de la superficie horizontal so- bre el cuerpo; T es la fuerza que se aplica a la barra y cuya magnitud se debe determinar; f es la fuerza de fricción, que tiene dirección horizontal y sentido ha- cia la derecha ya que en la figura el movimiento es hacia la izquierda. La fuerza total que se aplica sobre el cuerpo es, entonces, N + T + f + P.

FUERZAS DE FRICCIÓN Y DE CONSTRICCI~N 145
Por otro lado, si se requiere que el cuerpo se mueva con velocidad constante, entonces su aceleración a debe ser cero. Por tanto, aplicando la segunda ley de Newton se tiene que
N + T + f + P = O (7.83)
Escogemos un sistema de coordenadas como el mos- trado en la f igura 7.25b. Tomamos componentes de la ec. (7.83) a lo largo de los ejes
componente x: - T cos cy f f = O (7.84) componente y: N - P - Tsen 01 = O (7.85)
Ahora escribiremos la magnitud de la fuerza de fricción f. Notamos que en este caso hay dos fuerzas que aprietan a las superficies: la primera es el peso P y la segunda es la componente y de la fuerza T. O sea que, usando la ec. (7.59). se tiene que
f = p(P + T,) = p(P + Tsen cy) (7.86)
Sustituyendo la ec. (7.86) en la ec. (7.84) nos da
- T cos cy + p(P + 7 sen cy) = O
Factorizando T en el lado izquierdo y pasando al otro miembro el sumando que contiene a p f
T(p sen cy - cos cy) = -pf
Despejando 7
T = PP cos cy - p sen cy
(7.87)
Sustituyendo los valores dados se encuentra que
T = 1.2 x 20 kg
cos 35O - 1.2 X sen 35O
" -
0.1 309 24 kg = 183.4 kg!
Otra posibil idad de mover el cuerpo es jalándolo, en lugar de empujarlo. Se puede calcular la magnitud de la fuerza R que es necesario aplicar en este caso. E l resultado es (véase problema 7.47)
R = PP cos cy + y sen a
(7.88)
Sustituyendo los valores del problema se obtiene que
R = 15.9 kg!
gen de esta diferencia está en el hecho de que cuando se empuja el cuerpo, de la ec. (7.86) vernos que la fuer- za que aprieta a las dos superficies no es solamente P sino que se le añade la componente y de la fuerza 1, que tiene sentido hacia abajo. Por tanto, la fuerza de fricción que se opone al movimiento aumenta. En el caso en que se jala, la fuerza que aprieta es menor que P (véase problema 7.47), ya que se le resta la compo- nente y de R, que ahora tiene sentido hacia arriba.
7.3. ALGUNAS CONSlDERAClONES SOBRE LAS FUERZAS DE FRICCIÓN Y DE C O N S T R I C C I ~ N
En los ejercicios que se han resuelto en este capítu- lo se consideraron diferentes tipos de fuerzas: la fuer- za gravitacional que ejerce la Tierra sobre los cuerpos que están a su alrededor, las fuerzas de tensión en un cable, la fuerza de reacción de una superficie sobre la que se encuentra un cuerpo, la fuerza de fricción. Sin haberlo mencionado, se ha supuesto que entre estas fuerzas hay diferencias esenciales. Efectivamente, una fuerza como la gravitacional t iene la característi- ca de que siempre se ejerce sobre los cuerpos, estén en la condición que esten, se muevan o no. Así, s i la única fuerza que actlid sobre el cuerpo es la de la gra- vedad, esta fuerza hace que el cuerpo empiece a mo- verse.
Por otro lado, las fuerzas de fricción son diferentes a la de la gravitación. Si, por ejemplo, se tiene un cuer- po en reposo sobre una superficie rugosa, de tal forma q,le haya fricción entre ellos, y no 5e aplica fuerza ex- tern& adicional alguna, entonces la fuerza de fricción no se marlifiesta. No ocurre que la fuerza de fricción haga que el cuerpo empiece a moverse. La fuerza de fricción empieza a actuar solarnente si otra fuerza ex- terna F intenta que haya deslizamiento sobre la super- ficie rugosa (fig. 7.18a). En este momento empieza a aparecer la fuerza de fricción. Además, la magnitud con que aparece la fuerza de fricción va cambiando; s i la fuerza externa es de magnitud muy pequeña, en- tonces la fuerza de fricción que se le opone también será de magnitud pequeña; de hecho, de la misma magnitud que la externa, de modo que impide el mo- vimiento del cuerpo. A medida que la magnitud de la fuerza externa F aumenta, la magnitud de la fuerza de fricción aumenta, hasta que llega al máximo valor que puede alcanzar, dado por la ec. (7.59). S i ahora la fuerza externa F tiene magnitud mayor que este máximo
entonces habrá una fuerza neta en el sentido de F que Por tanto, hay una diferencia considerable entre hace que el cuerpo empiece a moverse (fig. 7.18b).
empujar o jalar. Para algunas personas que han usado En el ejercicio 7.12 vemos que s i el ángulo de inclina- podadoras de pasto, aparatos limpiadores de tapetes, ción del plano es muy pequeño (0 < O=), entonces no etc., este resultado es conocido empíricamente. E l ori- ocurre que la fuerza de fricción tenga mayor magnl-

14 Cap 7 . A P L I C A C I ~ T ~ E S DE LAS LEYES DE NEWTON
tud que Id com[mswn!e del peso a lo largo del plano y # por tanto, haya und fuerza neta hacia arriba y el cuer- po empiece a moverse hacia arriba. Lo que ocurre es que dado que Id componente mencionada del peso tiene una magnitud pequeña. entonces la magnitud de la fuerza de fricción es igual a esta componente con el resultado de que la fuerza neta a lo largo del plano es nula y no hay movimiento AI aumentar el ingulo de inclinación, la componente del peso aumen- ta al mismo tiempo aumenta la fuerza de friccihn. t.stci ocurre hasta que la magnitud de !a fuerza de fric- ci6n adquiere su máximo valor, dado por Id cjc (7.673. E;tc; ocurre para el ángulo de inclin,-icibn O,. A partir dc i " : t ~ momento, la componente a 1 0 largo del plano puetff. vencer 2: la fuerza de friccihn y empieza a ha- brr n?ovimlc>nto hac!a abajo. Esto aclara el resultado dado por la ec. (7.71) en que se afirma que la acelera- ción es cero para ángulos menores que el crítico I?,.
Cuando un cuerpo se mueve sobre una superficie (por. ejemplo, un plano inclinado o una superficie hori- zont,tl), entonces aparece otra fuerza, que hemos de- signado como d e reacción (son las fuerzas N de las fi- guras 7.19h y 7 2 2 , por ejemplo). Estas fuerzas reciben el nombre general de fuerzas de constricción. Son pre- clsamente las fuerzas de constriccihn las que obligan a un carrito a seguir hacia arriba y hacia abajo la for- ma que t iene la montafia rusa, las que obligan a una pelota que rueda sobre una mesa horizontal a mover- se solamente en el plano de la mesa, etc. Las fuerzas de coostrlcción también tienen la característica de quc ' su magnitud depende de la presencla de fuerzas externas Así, en el caso del ejercicio 7.13 (f ig 7.22), de la ec (7.74) vemos que si la magnitud de! peso p del cuerpo cambid, entonces, para que no hakd movi- miento verticai, la magnitud N también debe cambiar Es decir, la m e w debe w r capar de ejercer irla fuerra hacia arriba N tal que cancele el peso d ~ l cuerpo, sea el que sea éste. Por supuesto que s i en determinado momento la mesa deja de ser capar de generar la tuerra de constr icci tn N que cancele al peso, enton- c.cls P I cuerpo se mover.& hacia abajo. 1.d capacidad de u n a superficie dtt generar una fuerza de constricción depende, en última instancia on sus propiedades elks- ticas. Por supuesto que cualquier sistema tendrá siempre un lírnite para generar una fuerra de cons- t l- icci i ln de la rnagnitud apropiada Si se coloca un cuerpo extremadamente pesado sobre una mesa, podrá ocurrir que la mesa no I C ) soporte, es decir que no genere i a fue!.ra de constricc i6n N de magnitud SCI- ficientc:
t n general, la direcccbn v e ! sentido de las fuerzas d c fricciOn y de constrircibn quedan determinadas p o r l a ,Ituacibn física: en l a frlccibn se oponen a l mo- vlrnlento, mientras que /as fuerzas de constricrrón ge- nt.radns por una supvrficre siempre son perpendiculs- rc5 <I t>/la. E S en la m,lgnitud donde estas tarrzas mani- f ies tdn S C I S propiedades si!lgulares
Fr l resumen, vemos que existen en la naturaleza dos \ ip<)s dt. fuerzas. las que s c generan independiente- r~ l cn tc de que haya otras fuerlas presentes. por
ejemplo, las gravitacionales, que ya vimos, o las eléctricas, magnéticas, etc., y aquellas como las de fricción o de constricción que van adquiriendo una magnitud que depende de la presencia y magnitud de otras fuerzas externas
7.4. MOVIMIENTO CIRCULAR
Como se estudió en e l capítulo 5, s i una partícula realiza un movimiento circular, entonces experimenta una aceleración. Si el movimiento es circular unifor- me (véase sección 5.4), entonces la única aceleración que experimenta el cuerpo es la centripeta, es decir, hacia el centro del círculo. Si, por otro lado, el movi- miento no es circular uniforme (véase sección S S ) , en- tonces además de l a aceleración centrípeta, la par- tícula también experimenta una aceleración tangen- cial.
De acuerdo con l a segunda ley de Newton, s i un cuerpo experimenta una aceleración, entonces eso significa que una fuerza está actuando sobre él. Por consiguiente, podemos decir que se ejercen fuerzas sobre un cuerpo en movimiento circular.
Si el movimiento es circular uniforme, entonces la única fuerza es centrípeta (f ig 7.26) y su valor F, es
F, = ma, (7.89)
Figura 7.26
La direcclón de esta fuerza es a lo largo del radio; su sentido es hacia el centro O del círculo y su magnitud es
IF, = mla,i
= mw2R = mv2/R (7.90)
En estas ecuaciones R es el radio del círculo, w la velo- cidad angular constante y v, la velocidad lineal que, como se sabe, es tangencial. Se usó la expresión (5.60) para la, l .
S i el movimiento es circular, pero no uniforme, en- tonces además de l a fuerza centrípeta F, hay una fuer- za tangencia1 F,(fig 7.27). E l valor de la fuerza centrí-
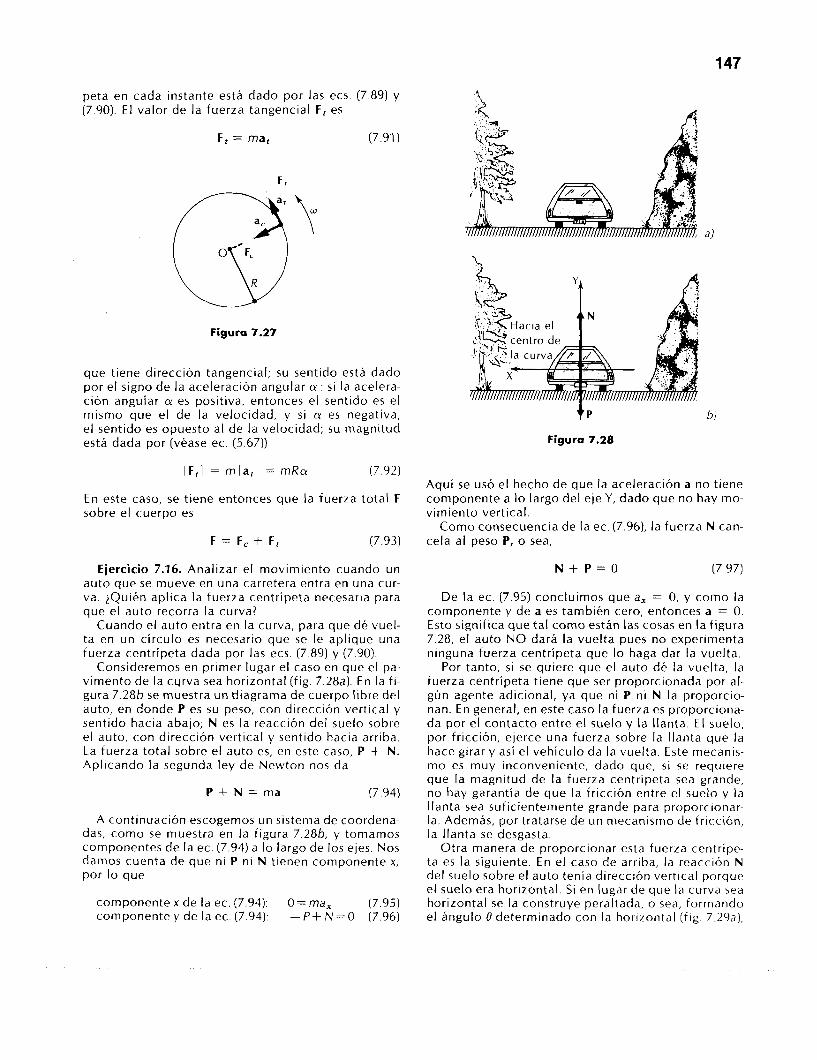
147
peta en cada instante está dado por las ecs. (7.89) y (7.90). E l valor de la fuerza tangencial F , es
F, = ma, (7.91)
Figura 7.27
que tiene dirección tangencial; su sentido está dado por el signo de la aceleración angular (Y : si la acelera- ción angular (Y es positiva, entonces el sentido es el mismo que el de la velocidad, y s i CY es negativa, el sentido es opuesto al de la velocidad; su magnitud está dada por (véase ec. (5.67))
IF,I = mla,I = mRa (7.92)
En este caso, se tiene entonces que la fuerza total F sobre el cuerpo es
F = F, + F, (7.93)
Ejercicio 7.16. Analizar el movimiento cuando un auto que se mueve en una carretera entra en una cur- va. )Quién aplica la fuerza Centrípeta necesaria para que el auto recorra la curva?
Cuando el auto entra en la curva, para que dé vuel- ta en un círculo es necesario que se le aplique una fuerza centrípeta dada por las ecs. (7.89) y (7.90).
Consideremos en primer lugar el caso en que el pa- vimento de la curva sea horizontal (fig. 7.28a). En la fi- gura 7.28b se muestra un diagrama de cuerpo libre del auto, en donde P es su peso, con dirección vertical y sentido hacia abajo; N es la reacción del suelo sobre el auto, con dirección vertical y sentido hacia arriba. L.a fuerza total sobre el auto es, en este caso, P + N. Aplicando la segunda ley de Newton nos da
P + N = r n a (7.94)
A continuación escogemos un sistema de coordena- das, como se muestra en la figura 7.28b, y tomamos componentes de la ec. (7.94) a lo largo de los ejes. Nos damos cuenta de que ni P n i N tienen componente x, por lo que
componente x de la ec. (7.94): O = ma, (7.95) componente y de la ec. (7.94): - P + N = O (7.96)
Figura 7.28
bi
Aquí se usó el hecho de que la aceleración a no tiene componente a lo largo del eje Y, dado que no hay mo- vimiento vertical.
Como consecuencia de la ec. (7.96), la fuerza N can- cela al peso P, o sea,
N + P = O (7.97)
De la ec. (7.95) concluimos que a , = O, y como la componente y de a es también cero, entonces a = O. Esto significa que tal como están las cosas en la figura 7.28, el auto NO dará la vuelta pues no experimenta ninguna fuerza centrípeta que lo haga dar la vuelta.
Por tanto, s i se quiere que el auto dé la vuelta, la fuerza centrípeta tiene que ser proporcionada por al- gún agente adicional, ya que ni P ni N la proporcio- nan. En general, en este caso la fuerza es proporciona- da por el contacto entre e¡ suelo y la l lanta. E l suelo, por fricción, ejerce una fuerza sobre la llanta que la hace girar y así el vehículo da la vuelta. Este mecanis- m o es muy inconveniente, dado que, s i se requiere que la magnitud de la fuerza centrípeta sea grande, no hay garantía de que la fricción entre el suelo y la llanta sea suficientemente grande para proporcionar- la. Además, por tratarse de un mecanismo de fricción, la llanta se desgasta.
Otra manera de proporcionar esta fuerza centrípe- ta es la siguiente. En el caso de arriba, la reacción N del suelo sobre el auto tenía dirección vertical porque el suelo era horizontal. S i en lugar de que la curva sea horizontal se la construye peraltada, o sea, formando el ángulo 0 determinado con la horizontal (ftg 7 2%).
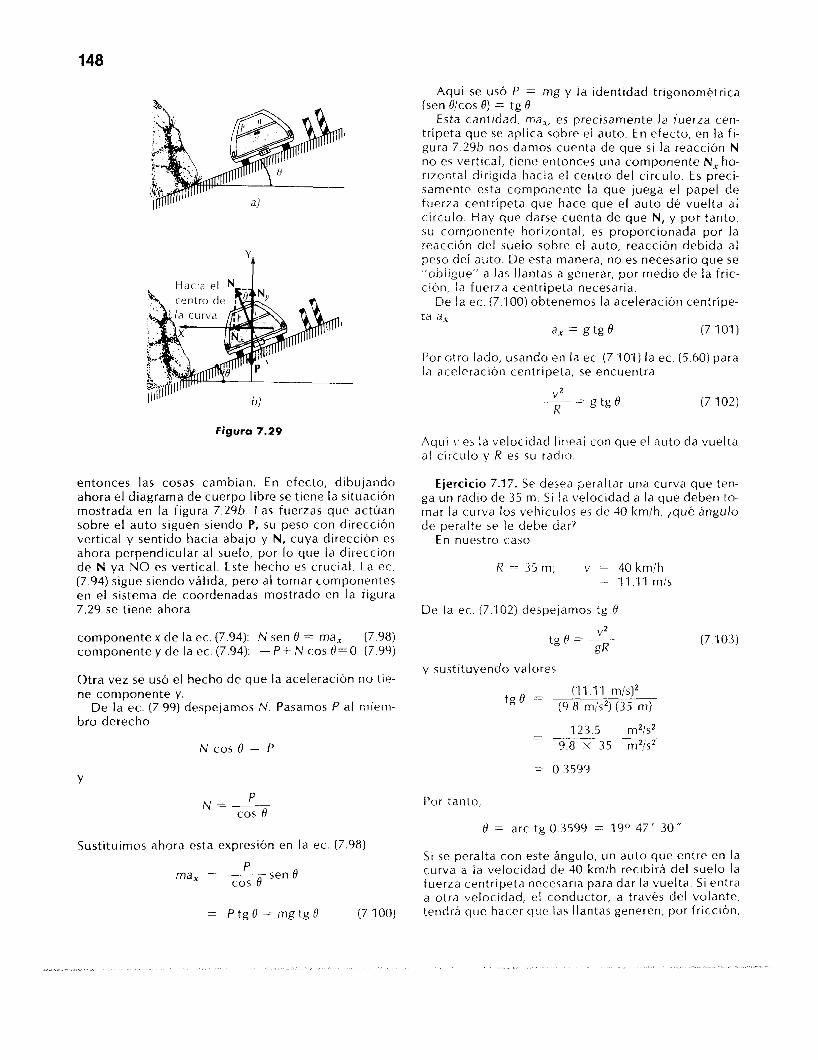
148
Aquí se usó P = mg y la identidad trigonométrica
Esta cantidad, ma,, es precisamente la fuerza cen- I trípeta que se nplica sobre el auto. En efecto, en la fi-
gura 7.29b nos damos cuenta de que si la reacción N no es vertical, tiene entonces una componente N, ho- rizontal diriglda hacia el centro del círculo. E s preci- samente esta componente la que juega el papel de tuerza centrípeta que hace que el auto dé vuelta al circulo t i a v que darse cuenta de que N, y por tanto, s u componente horizontal, es proporcionada por la reacción del sueio sobre el auto, reacción debida al peso riel auto. De esta manera, no es necesario que se "obiigue" a las llantas a generar, por medio de la fric- ción, la fuerza centrípeta necesaria.
De la ec. (7.100) obtenemos la aceleración centrípe- ta a,
a, = g tg 8 (7 101)
Por otro lado, usando en la ec. (7.101) la ec (5.60) para la aceleración centrípeta, se encuentra
(sen @cos P) = tg 8.
"2
R " - - g t g 8 (7.102)
Figura 7.29
entonces las cosas cambian. En efecto, dibujarido ahora el diagrama de cuerpo libre se tiene la situación mostrada en la figura 7.29b. Las fuerzas que actúan sobre el auto siguen siendo P I su peso con dirección vertical y sentido hacia abajo y N, cuya dirección es ahora perpendicular al suelo, por la que la direccibn de N ya NO es vertical. Este hecho es crucial. La ec. (7.94) sigue siendo válida, pero al tomar componentes en el sistema de coordenadas mostrado en la figura 7.29 se tiene ahora
componente x de la ec. (7.94): N sen 8 ma, (7.98) componente y de la ec. (7.94): - P+ N cos 8=0 (7.99)
Aquí es la velocidad lineal con que el auto da vuelta al círculo y R es su rad io
Ejercicio 7.17. Se desea peraltar una curva que ten- ga un radio de 35 m. Si ia velocidad a la que deben to- mar la curva los vehículos ps de 40 km/h, iqué ángulo de peralte se le debe dar?
En nuestro caso
De la ec. (7.102) despejamos tg 8
(7 103)
Otra vez se usó el hecho de que la aceleración no tie- ne componente y. (1 1 .I 1
De la ec. (7.99) despejamos N. Pasamos P al miem-
y sustituyendo valores
t g 8 = (9.8 mi's2) (35 m) bro derecho
N cos 8 = P
Y = 0 3599
P cos O
N="- Por tanto,
6, = arc tg 0.3599 = 19O 47' 30"
S i se peralta con este ángulo, un auto que entre en la curva a la velocidad de 40 km/h recibirá del suelo la
a otra velocidad, e! conductor, a traves del volante, = PtgO = m g t g a (7.100) tendrá que hacer que las llantas generen, por fricción,
Sustituimos ahora esta expresión en la ec. (7.98)
ma, = ___ sen O cos 8 fuerza centrípeta necesaria para dar la vuelta. Si entra

PROBLEMAS 149
la fuerza que falta para completar la fuerza centrípe- ta necesaria. Para evitar desgastes de llantas, es reco- mendable entonces tomar las curvas a la velocidad in- dicada.
De la ec. (7.103) nos damos cuenta de que el ángulo de peralte 8 no depende de la masa del vehículo. Esto significa que el MISMO ángulo dará la fuerza centrí- peta necesaria para que cualquier vehículo, ya sea de masa grande o pequeña, pueda dar la vuelta. E l ángu- lo de peralte solamente depende de la velocidad Ii- neal con que se da la vuelta y del radio de la curva.
PROBLEMAS
7.1. Un cuerpo de masa m se acelera con magnitud a. Encuentre la magnitud de la fuerza F aplicada s i :
a) m = 125 kg; a = 2.5 mis2. b) m = 250 g; a = 18.7 cm/s2. c) m = 2.4 kg; a = 3.4 km/h2.
7.2. Demuestre la ec. (7.3). 7.3. Sobre un cuerpo de masa m se aplica una fuerza de magnitud f. Encuentre la magnitud de la acelera- ción que experimenta si:
a) m = 18.6 kg; f = 26.3 N. b) m = 322 g; F = 17.4 N. c) m = 12.9 kg; F = 33.6 kg.
7.4. iCuánto pesa un cuerpo s i su masa es:
a) m = 62.5 kg? b) m = 487 g? c) m = 128 libras?
7.5. Demuestre que un cuerpo de masa 30 kg pesa 4.99 kg en la superficie de la Luna. 7.6. E l peso de un cuerpo en la Tierra es de 88.4 kg. iCuánto pesa en Júpiter?, jcuánto en Mercurio? Use los valores g, = 2.65g y g, = 0.38g. 7.7. jPor qué en el ejercicio 7.5 la aceleración A es horizontal? 7.8. justifique la ec. (7.12), válida para cables inexten- sibles. 7.9. Refiriéndonos al ejercicio 7.5, discuta el caso en que el cable sea extensible. iQué aceleración experi- menta el cuerpo? 7.10. Suponga que en el ejercicio 7.5 el cuerpo tiene masa M = 4.5 kg y la cuerda tiene masa m = 930 g. >Cuál es el porcentaje de la fuerza trasmitida por la cuerda al cuerpo? 7.11. iPuede una fuerza horizontal cancelar una fuer- za vertical? Con respecto al ejercicio 7.6. ipueden las fuerzas F , y F2 ser horizontales si se considera el peso de la cuerda P? 7.12. S i en el ejercicio 7.5 la cuerda tiene masa de 1.2 kg y se aplica en su extremo una fuerza de 9 kg, jqué ángulo formará la cuerda en su extremo con la hori-
zontal para que el peso de la cuerda se equilibre y no haya aceleración vertical? Exprese su resultado en ra- dianes. 7.13. Demuestre la congruencia dimensional de las ecs. (7.13) y (7.14). 7.14. Con respecto al ejercicio 7.7 jpor qué la acelera- ción tiene que tener dirección a lo largo del plano? iPor qué no t iene componente perpendicular al pla- no? 7.15. Verifique la congruencia dimensional de la ec. (7.24). 7.16. Haga una gráfica de a contra 8(ec. (7.24)) obteni- da en el ejercicio 7.7. 7.17. Se quiere que un cuerpo resbale a lo largo de un plano inclinado con una aceleración de 2.6 mis2. iQué inclinación debe tener el plano? 7.18. Resuelva el ejercicio 7.8 para los casos en que M < m sen 8 y en que M = m sen 8. Obtenga en cada caso las magnitudes y sentidos de la aceleración a y de la fuerza F , . 7.19. Verifique la congruencia dimensional de las ecs. (7.35) y (7.39). 7.20. S i en la figura 7.10 los valores de las masas son: m = 28 k g y M = 45 k g y el ángulo 0 es 32O, ihac ia dónde se mueve el sistema?, icon qué aceleración?, icuál es la tensión en la cuerda? Suponga que la cuer- da es de masa despreciable e inextensible. 7.21. Obtenga la magnitud de la fuerza f, del ejerci- cio 7.9. Verifique la congruencia dimensional de su re- sultado. Interprete físicamente sus resultados. 7.22. Demuestre la congruencia dimensional de la ec. (7.48a). 7.23. En una máquina de Atwood, uno de los cuerpos tiene masa de 45 g mientras que el otro tiene masa de 47 g. iHacia dónde se mueve el sistema? i c o n q u é aceleración? jCuál es la tensión en la cuerda? Supon- ga que la cuerda es de masa despreciable e inextensi- ble. 7.24. En una máquina de Atwood, uno de los cuerpos tiene masa de 17 g y el otro t iene masa de 25 g. Si ini- cialmente los dos cuerpos están en reposo y ambos a la misma altura, jen qué posición se encuentra la masa de 25 g después de 2.4 S ? 7.25. Una máquina de Atwood tiene dos pesos iguales de 210 g. En uno de los brazos se coloca una carga adicional de 8 g. Si inicialmente los dos lados de la máquina están en reposo y a la misma altura, iqué distancia recorre el brazo más cargado en 2 S ? Si en este instante se quita la carga adicional, jqué distan- cia recorre este brazo en los 2 S siguientes? 7.26. Resuelva el ejercicio 7.9 para los casos en que M < m y en que M = m. 7.27. Un cuerpo de masa 5.2 k g se mueve en una tra- yectoria dada por las ecuaciones x = 3t2, y = " 2 t 3 + 4t2 - 6t + 4, con t expresada en segundos y (x, y) en metros. Encuentre la fuerza que actúa sobre el cuerpo en el instante t = 1.5 s. 7.28. Una pelota de masa 150 g está en contacto con un bat durante un milésimo de segundo y cambia su velocidad en 25 mls. iQué fuerza se le impartió?.
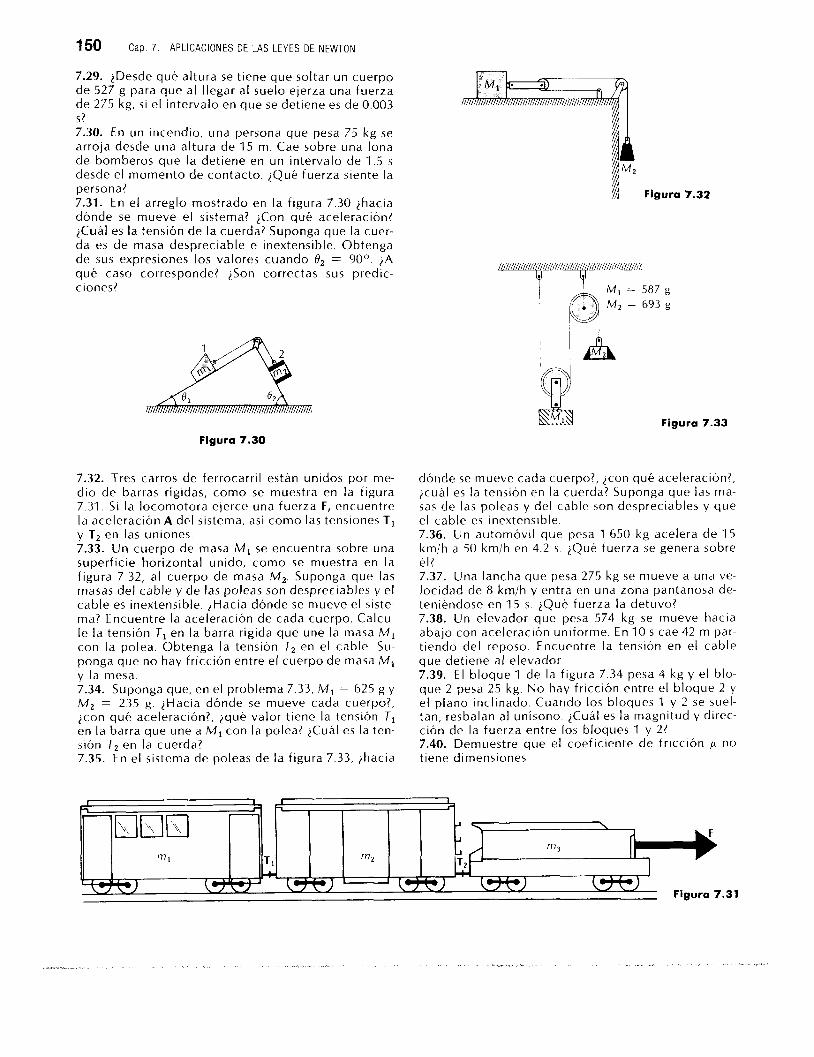
150 Cap. 7. APLICACIONES DE LAS LEYES DE NEWTON
7.29. >Desde qué altura se tiene que soltar un cuerpo de 527 g para que al llegar al suelo ejerza una fuerza de 275 kg, si el intervalo en que se detiene es de 0.003 S ? 7.30. En un incendio, una persona que pesa 75 k g se arroja desde una altura de 15 m. Cae sobre una lona de bomberos que la detiene en un intervalo de 1 . 5 S desde el momento de contacto. iQué fuerza siente la persona? 7.31. En el arreglo mostrado en la figura 7.30 ihacia dónde se mueve el sistema? icon qué aceleración? >Cuál es la tensión de la cuerda? Suponga que la cuer- da es de masa despreciable e inextensible. Obtenga de sus expresiones los valores cuando O2 = 90O. 2A qué caso corresponde? iSon correctas sus predic- ciones?
Figura 7.30
7.32. Tres carros de ferrocarril están unidos por me- dio de barras rígidas, como se muestra en la figura 7.31. S i la locomotora ejerce una fuerza F, encuentre la aceleración A del sistema, así como las tensiones 1, y T2 en las uniones. 7.33. Un cuerpo de masa M , se encuentra sobre una superficie horizontal unido, como se muestra en la figura 7.32, al cuerpo de masa M,. Suponga que las masas del cable y de las poleas son despreciables y el cable es inextensible. iHacia dónde se mueve el siste- ma? Encuentre la aceleración de cada cuerpo. Calcu- le la tensión TI en la barra rígida que une la masa M1 con la polea. Obtenga la tensión T2 en el cable. Su- ponga que no hay fricción entre el cuerpo de masa M, y la mesa. 7.34. Suponga que, en el problema 7.33, M , = 625 g y M, = 235 g. iHacia dónde se mueve cada cuerpo?, icon qué aceleración?, >qué valor tiene la tensión TI en la barra que une a M , con la polea? iCuá1 es la ten- sión T2 en la cuerda? 7.35. En el sistema de poleas de la figura 7.33, >hacia
Figura 7.32
dónde se mueve cada cuerpo?, (con qué aceleración?, jcuál es la tensión en la cuerda? Suponga que las ma- sas cle las poleas y del cable son despreciables y que el cable es inextensible. 7.36. Un automóvil que pesa 1 650 kg acelera de 1 5 kmih a 50 kmlh en 4.2 S >Qué fuerza se genera sobre éI? 7.37. Una lancha que pesa 275 kg se mueve a una ve- locidad de 8 krnlh y entra en una zona pantanosa de- teniéndose en 15 s. iQue fuerza la detuvo? 7.38. Un elevador que pesa 574 kg se mueve hacia abajo con aceleración uniforme. En 10 S cae 42 m par- tiendo del reposo. Encuentre la tensión en el cable que detiene al elevador. 7.39. E l bloque 1 de la figura 7.34 pesa 4 kg y el blo- que 2 pesa 25 kg. No hay fricción entre el bloque 2 y e l plano inclinado Cuando los bloques 1 y 2 se suel- tan, resbalan al unísono. iCuál es la magnitud y direc- ción de la fuerza entre los bloques 1 y 2? 7.40. Demuestre que el coeficiente de fricción p no tiene dimensiones
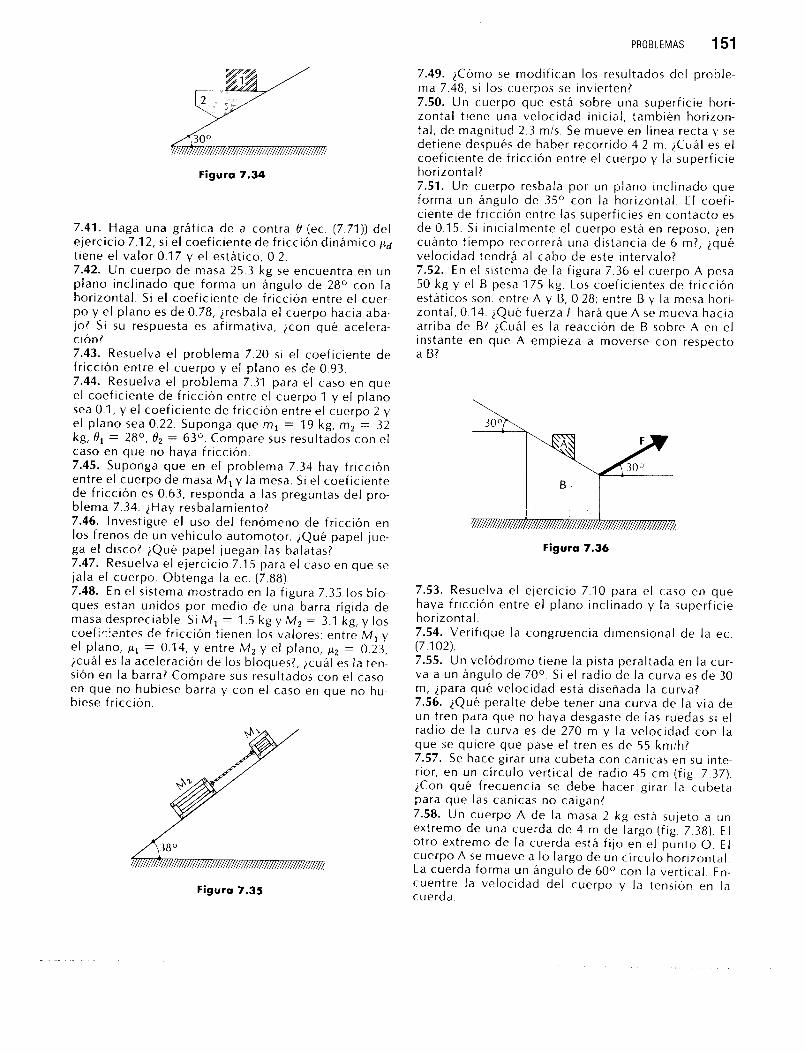
PROBLEMAS 151
Figura 7.34
7.41. Haga una gráfica de a contra 6' (ec. (7.71)) del ejercicio 7.12, s i el coeficiente de fricción dinámico pd tiene el valor 0.17 y el estático, 0.2. 7.42. Un cuerpo de masa 25.3 kg se encuentra en un plano inclinado que forma un ángulo de 28O con la horizontal. S i el coeficiente de fricción entre el cuer- p o y el plano es de 0.78, jresbala el cuerpo hacia aba- jo? S i su respuesta es afirmativa, icon qué acelera- ción? 7.43. Resuelva el problema 7 20 s i el coeficiente de fricción entre el cuerpo y el plano es de 0.93. 7.44. Resuelva el problema 7.31 para el caso en que el coeficiente de fricción entre el cuerpo 1 y el plano sea 0.1, y el coeficiente de fricción entre el cuerpo 2 y el plano sea 0.22. Suponga que m, = 19 kg, m2 = 32 kg, 8, = 28O, 0, = 63O. Compare sus resultados con el caso en que no haya fricción. 7.45. Suponga que en el problema 7.34 hay fricción entre el cuerpo de masa M , y la mesa. S i el coeficiente de fricción es 0.63, responda a las preguntas del pro- blema 7.34. )Hay resbalamiento? 7.46. Investigue el uso del fenómeno de fricción en los frenos de un vehículo automotor. iQué papel jue- ga el disco? 2Qué papel juegan las balatas? 7.47. Resuelva el ejercicio 7.1 5 para el caso en que se jala el cuerpo. Obtenga la ec. (7.88). 7.48. En el sistema mostrado en la figura 7.35 los blo- ques estan unidos por medio de una barra rígida de masa despreciable. Si M , = 1 .S kg y M, = 3.1 kg, y los coefi-isntes de fricción tienen los valores: entre M , y el plano, pl = 0.14, y entre M, y el plano, p 2 = 0.23, jcuál es la aceleración de los bloques?, jcuál es la ten- sión en la barra? Compare sus resultados con el caso en que no hubiese barra y con el caso en que no hu- biese fricción.
Figura 7.35
7.49. jCómo se modifican los resultados del proble- ma 7.48, si los cuerpos se invierten? 7.50. Un cuerpo que está sobre una superficie hori- zontal tiene una velocidad inicial, también horizon- tal, de magnitud 2.3 mis. Se mueve en línea recta y se detiene después de haber recorrido 4.2 m. iCuá1 es el coeficiente de fricción entre el cuerpo y la superficie horizontal? 7.51. Un cuerpo resbala por un plano inclinado que forma un ángulo de 35O con la horizontal E l coefi- ciente de fricción entre las superficies en contacto es de 0.15. S i inicialmente el cuerpo está en reposo, jen cuánto tiernpo recorrerá una distancia de 6 m?, iqué velocidad tendrd al cabo de este intervalo? 7.52. En el sistema de la figura 7.36 el cuerpo A pesa 50 kg y el B pesa 175 kg. Los coeficientes de fricción estáticos son: entre A y B, 0.28; entre B y la mesa hori- zontal, 0.14. jQué fuerza F hará que A se mueva hacia arriba de B? iCuá1 es la reacción de B sobre A en el instante en que A empieza a moverse con respecto a B?
I I
Figura 7.36
7.53. Resuelva el ejercicio 7.10 para el caso en que haya fricción entre el plano inclinado y la superficie horizontal. 7.54. Verifique la congruencia dimensional de la ec. (7.102). 7.55. Un velódromo tiene la pista peraltada en la cur- va a un ángulo de 70° Si el radio de la curva es de 30 m, ipara qué velocidad está diseñada la curva? 7.56. iQué peralte debe tener una curva de la vía de un tren pdra que no haya desgaste de las ruedas s i el radio de la curva es de 270 m y la velocidad con la que se quiere que pase el tren es de 55 kmih? 7.57. Se hace girar una cubeta con canicas en su inte- rior, en un círculo vertical de radio 45 cm ( f ig 7.37). icon qué frecuencia se debe hacer girar la cubeta para que las canicas no caigan? 7.58. Un cuerpo A de la masa 2 kg está sujeto a un extremo de una cuerda de 4 m de largo (fig. 7.38). E l otro extremo de la cuerda está fijo en el punto O. E l cuerpo A se mueve a lo largo de un círculo horirontal. La cuerda forma un ángulo de 60° con la vertical. En- cuentre la velocidad del cuerpo y la tensión en la cuerda.
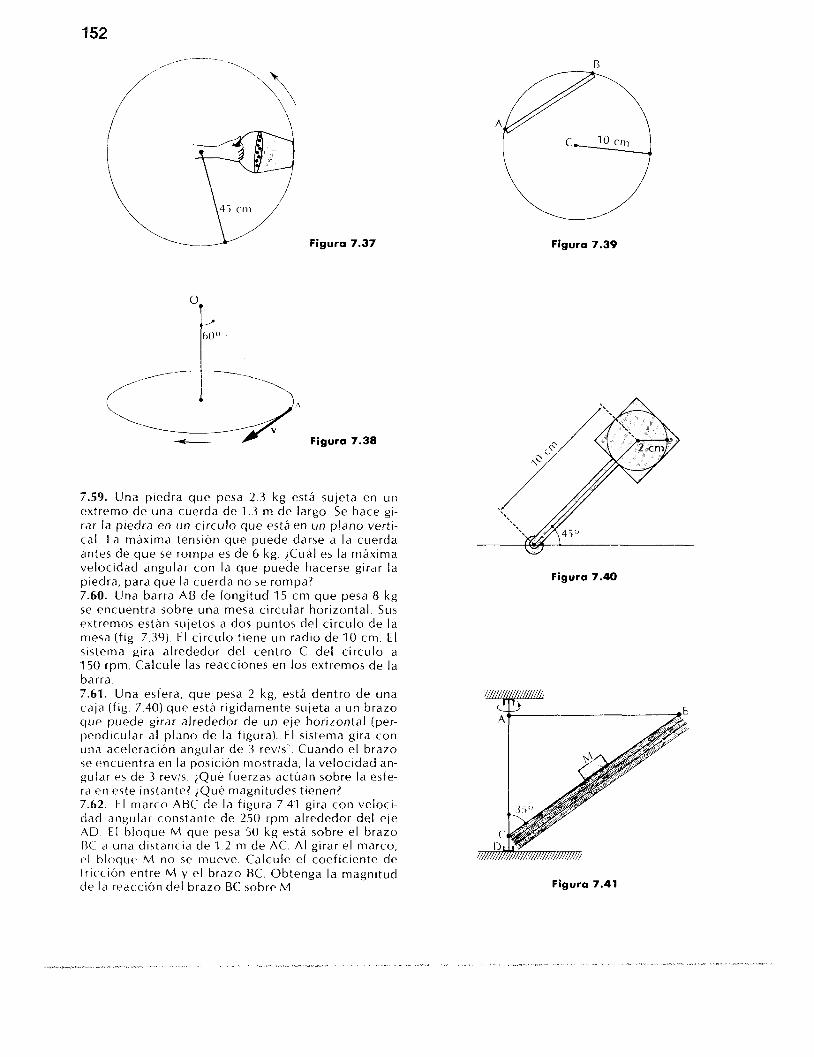
R
7.59. Una piedra que pesa 2.3 kg está sujeta en un extremo de una cuerda de 1.3 m de largo. Se hace gi- rar la piedra en un círculo que está en un plano verti- cal. La máxima tensión que puede darse a la cuerda antes de que se rompa es de 6 kg. iCuál es la máxima velocidad angular con la que puede hacerse girar la piedra, para que la cuerda no se rompa? 7.60. Una barra A B de longitud 1 5 cm que pesa 8 kg se encuentra sobre una mesa circular horizontal. Sus extremos están sujetos a dos puntos del circulo de la mesa (fig. 7.39). E l círculo t iene un radio de 10 cm. E l sistema gira alrededor del centro C del círculo a 150 rpm. Calcule las reacciones en los extremos de la barra. 7.61. Una esfera, que pesa 2 kg, está dentro de una caja (fig. 7.40) que está rígidamente sujeta a un brazo que puede girar alrededor de un eje horizontal (per- pendicular al pldno de la figura). E l sistema gira con una aceleración angular de 3 revls'. Cuando el brazo se wcuentra en la posición mostrada, la velocidad an- gular r3 de 3 revls. >Qué fuerzas actúan sobre la esfe- r d en este instante? iQué magnitudes tienen? 7.62. E l marco ABC de la figura 7.41 gira con veloci- dad angular constante de 250 rpm alrededor del eje A D E l bloque M que pesa 50 kg está sobre el brazo tSC a una distancia de 1 . 2 m de AC. Al girar el marco, ('1 bloque M no se mueve. Calcule el coeficiente de triccibn clntre M y el brazo BC. Obtenga la magnitud dr la reacci6n del brazo BC sobre M.
Figura 7.39
Figura 7.40
Figura 7.41
8.1. TRABAJO
T r a b a j o y e n e r g i a
F Ax = - (v,22 - v,12) m 2
Consideremos el caso en que una fuerza F constante se aplica a un cuerpo de masa m que se puede mover solamente a lo largo de una línea recta, sin que haya fricción entre las superficies (fig. 8.1). De la segunda ley de Newton sabemos que esta fuerza genera una Este resultado también se Puede escribir como aceleración.
1 2
- - - mvXz2 - 1 2 mv,, (8.4)
F A x = A -mv,2 a = F/m (8.1 1 í: ) (8.5)
que también es constante. En consecuencia, el movi-
muestra en la figura 8.1. Supongamos que cuando el rado. Tomemos un sistema de coordenadas, como se
dadA miento que realiza el cuerpo es uniformemente acele- Recuérdese la definición (3.1) de cambio de la canti-
el cuerpo está dada por cuerpo y de su movimiento instantáneo. Estas son la entonces, para este caso, que la distancia recorrida por dades asociadas solamente con las ProP]edades del do está en x2 tiene velocidad va. De la ec. (4.65) se tiene En el lado derecho de esta ecuación se tienen canti- cuerpo está en la posición x, tiene velocidad v,. y cuan-
cambio de A = AA = Afinar - Ai,icial
masa m y las velocidades vX1 y vX2. En el lado izquierdo I Ax = x2 - x1 = --(VX22 - VX12) (8.2) se tienen cantidades asociadas a la acción ejercida ex-
2a, ternamente sobre el cuerpo. Estas son la fuerza apli- cada y el desplazamiento. E s decir, en la ecuación (8.5) se logra una separación entre la acción externa y las propiedades intrínsecas del cuerpo. Se puede decir que
X la acción externa dada por el lado izquierdo de la ec. I I (8.5) se transforma en el cambio de la propiedad intrín-
X 1 Ax x2 seca del cuerpo (mv2/2). I
Si en lugar de que la fuerza constante F fuera hori- Figura 8. I zontal como en la figura 8.1 la fuerza tuviera una direc-
ción arbitraria (fig. 8.2), se puede demostrar que (véase problema 8.1)
Despejando de esta relación a,
1 F a, = - (vXz2 - vXl2) = - Ax m (8.31 (Fcos8)Ax = A -mvx (8.6) ( '2
Aquí Ax es la distancia recorrida y 8 el ángulo entre el Aquí se usó la ec. (8.1). Multiplicando ambos lados de vector F y el vector de desplazamiento Ar. La magnitud la última ecuación por m Ax se obtiene de Ares A x .
153
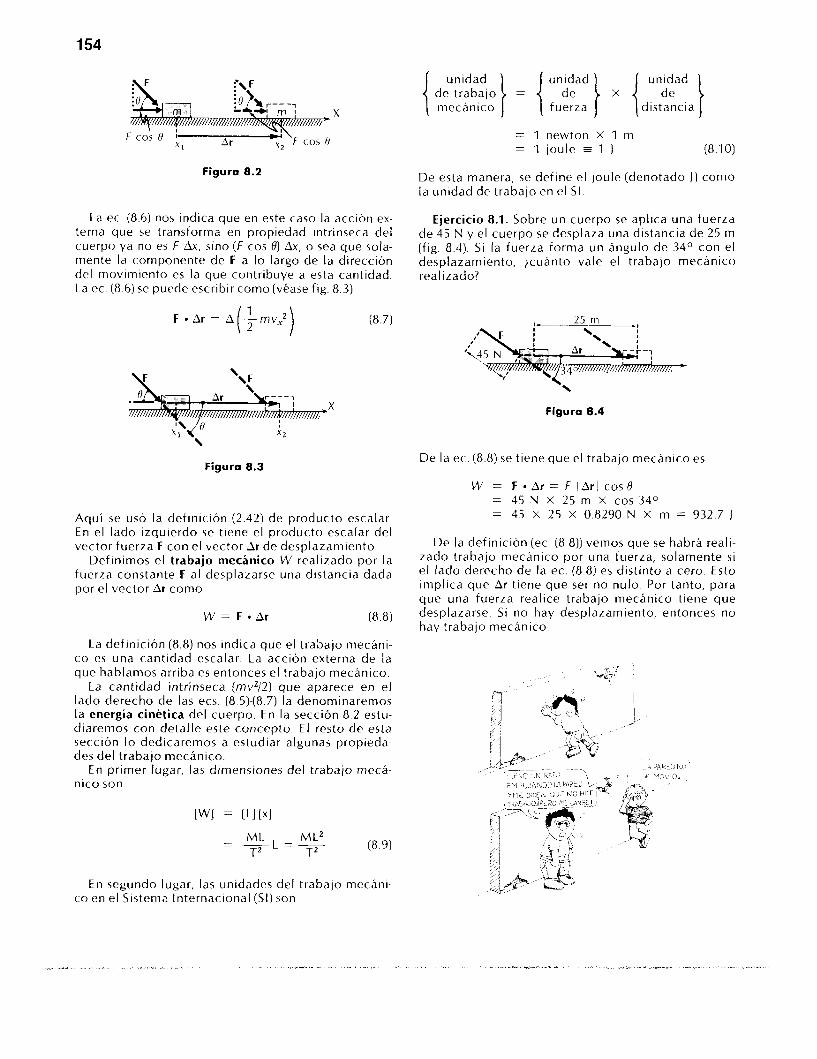
154
Figura 8.2
La ec. (8.6) nos indica que en este caso la acción ex- terna que se transforma en propiedad intrínseca del cuerpo ya no es f A x , sino (f cos 8) A x , o sea que sola- mente la componente de F a lo largo de la dirección del movimiento es la que contribuye a esta cantidad. La ec (8.6) se pucde escribir como (véase fig. 8.3)
X
Figura 8.3
Aquí se usó la definición (2.42) de producto escalar En el lado izquierdo se tiene el producto escalar del vector fuerza F con el vector Ar de desplazamiento.
Definimos el trabajo mecánico W realizado por la fuerza constante F al desplazarse una distancia dada por el vector Ar como
W = F * A r (8.8)
La definición (8.8) nos indica que el trabajo mecáni- co es una cantidad escalar. La acción externa de la que hablamos arriba es entonces el trabajo mecánico.
La cantidad intrínseca (rnv2/2) que aparece en el lado derecho de las ecs. (8.5)-(8.7) la denominaremos la energía cinética del cuerpo. En la sección 8.2 estu- diaremos con detalle este concepto. E l resto de esta sección lo dedicaremos a estudiar algunas propieda- des del trabajo mecánico.
En primer lugar, las dimensiones del trabajo mecA- nico son
En segundo lugar, las unidades del trabajo mecáni- co en el Sistema Internacional (SI) son
unidad unidad unidad z:::::: = fude:za x d i s c c i a
= 1 newton X 1 m = 1 joule = 1 1 (8.1 0)
De esta manera, se define el joule (denotado j ) como la unidad de trabajo en el SI.
Ejercicio 8.1. Sobre un cuerpo se aplica una fuerza de 45 N y el cuerpo se desplaza una distancia de 25 m (fig. 8.4). S i la fuerza forma un ángulo de 34O con el desplazamiento, jcuánto vale el trabajo mecánico realizado?
Figura 8.4
De la ec. (8.8) se tiene que el trabajo mecánico es
W = F * A r = F i A r ! cos0 = 45 N X 25 m X cos 34O = 45 X 25 X 0.8290 N X m = 932.7 J
De la definición (ec (8.8)) vemos que se habrá reali- zado trabajo mecánico por una fuerza, solamente si el lado derecho de la ec. (8.8) es distinto a cero. Esto implica que Ar tiene que ser no nulo. Por tanto, para que una fuerza realice trabajo mecánico tiene que desplazarse. Si no hay desplazamiento, entonces no hay trabajo mecánico.
En el lenguaje cotidiano uno se refiere a diversas acciones por medio de la palabra trabajo. Así, se dice que cuesta trabajo ganarse la vida, cuesta trabajo pa- sar un examen, etc. Nos damos cuenta de que este tra- bajo no es el trabajo mecánico que hemos definido. La definición precisa está dada por la ec. (8.8).
Ejercicio 8.2. Sobre un cuerpo se aplica una fuerza F que es perpendicular al desplazamiento Ar (iig. 8.5). iQué trabajo mecánico se realiza?
En este caso los vectores F y Ar son perpendicula- res, por lo que su producto escalar se anula (véase ejercicio 2 20).
W = F . A r = O
Figura 8.5
Si el desplazamiento es perpendicular a la fuerza apli- cada, el trabajo realizado por la fuerza es nulo. Tene- mos aquí un caso en que a pesar de que SI hay despla- zamiento, la fuerza aplicada NO realiza trabajo.
Podemos entender este resultado, que a primera vista nos puede sorprender. En efecto, s i la fuerza F es perpendicular al vector de desplazamiento Ar, en vir- tud del Principio de Superposición de Efectos (véase sección 5.1) dicha fuerza no afecta el movimiento a lo largo de la dirección de Ar. En particular, la fuerza F no genera ninguna aceleración a lo largo de la direc- ción de Ar, por lo que la velocidad a lo largo de esta dirección no cambia como resultado de la aplicación de F.
Ejercicio 8.3. Suponga que el ángulo entre la fuerza y el desplazamiento del ejercicio 8.1 fuera.de 126O (fig. 8.6).
25 m c I I
r( I !
Figura 8.6
¿Qué trabajo realiza en este caso la fuerza? En este caso se tiene de la ec (8.8) que
W = F Ar = F lAri cos0 = 45 N X 25 m X cos 126O = 45 X 25 X (- 0.5878) N X m = -661.3 J
En este caso el trabajo es negativo
S i el trabajo realizado por una fuerza es positivo, decimos que la fuerza realiza trabajo sobre el cuerpo.
Si el trabajo realizado por una fuerza resulta ser ne- gativo, se dice que se realiza trabajo contra la fuerza.
En el caso en que la fuerza aplicada no sea constan- te a lo largo del desplazamiento, se puede obtener el trabajo realizado de la siguiente manera.
En primer lugar consideremos el caso del movimien- to en una dimensión. Supóngase que se aplica sobre un cuerpo de masa m una fuerza f(x) que depende so- lamente de la posición. Esto significa que en distintos puntos en los que se encuentra el cuerpo, se le apli- can diferentes valores de la fuerza (fig. 8.7). De la se- gunda ley de Newton se tiene que
F(x) = m - dv dt (8.1 1)
Figura 8.7
Multipliquemos ambos miembros de esta ecuación por la velocidad v
F(x)v = mv- dv dt (8.1 2)
El lado derecho se puede escribir
como se puede comprobar inmedlatamente (véase problema 8.2). Por tanto, sustituyendo (8.13) en (8.12) obtenemos
Ahora integramos sobre el tiempo t ambos miembros de esta ecuación
De la definición de velocidad instantánea (ec. (3.18)) se tiene que vdt = dx, cantidad que sustituimos en el miembro izquierdo de la última expresión. Asimismo, las integrales las realizamos entre una posición x1 con

156 Cap. 8. TRABAJO Y ENERGiA
velocidad v1 v una posición x 2 con velocidad v2. El En este caso el trabajo resultó positivo; esto quiere miembro derecho de la últ ima ecuación es la integral decir que el agente externo que ejerce la fuerza sobre de una diferencial. Por tanto, el miembro derecho es el cuerpo realiza trabajo sobre el cuerpo. De la ec.
(8.15) podemos decir que en este caso el cambio de la ~ ~ : d ( $ m v 2 ) = ( f m v 2 ) l ~ energía cinética es positivo, o sea, la energía cinética
del cuerpo aumenta. b) La energía cinética inicial del cuerpo ( m ~ , ~ / 2 ) tiene
1 1 2 2
- - -mvZ2 - -mv12 el valor
1 1 -my: 2 = - X 2 4.2kg x ( 3.2:)
2
= A ( + m v 2 ) 1 = - X 4.2 X 10.24 kg- mz
2 S 2
E s decir, esta integral es el cambio de la energía ciné- tica del cuerpo. Por tanto, la ec. (8.1 4) queda como
= 21.5 I
1:: F(x)dx = A(+mv2 ) (8.1 5) Ahora, de la ec. (8.15) despejamos (mvZ2/2) 1 1 ,mvZ2 = W + ,mv12 (8.1 7)
En el miembro izauierdo de esta ecuación se tienen L L
lamente depende de características intrínsecas del 1 cuerpo y de su movimiento. Definimos, generalizando -mvZ2 2 = 442.71 J + 21.5 J = 464.2 J la definición (8.81. el trabajo W realizado Dor una fuer- za unidimensional F(x), que no es constante, al despla- zarse del punto x1 al punto x2, como
r x2
Ahora despejamos vZ2. Multiplicamos por 2 y dividi- mos entre m
W = x1 F(x)dx (8.16) 2 ~ 2 ’ = - X 464.2 J = ___ X 464.2 J = 221 .O5 m2/s2
Eiercicio 8.4. Una fuerza unidimensional dada por m 4.2 kg
[(x): Ax2, con A = 5 N/m2, se aplica sobre un cuerpo
x1 = 3 m hasta otro punto de coordenada x2 = 6.5 m. de de 4.2 kg, desde un punto de coordenada 1 Aqui Se UsÓ: (J/kg) = m2/s2. Véase el problema 8.7.
Por tanto, sacando raíz cuadrada se encuentra que a) 2Qué trabajo realiza l a fuerza? b) S i el cuerpo tiene una velocidad v1 = 3.2 mis v2 = J221 .O5 m2/s2 = 14.87 m/s
cuando está en xl, iqué velocidad v2 tiene cuan- do se encuentra en x,? S i se da la fuerza F(x) se puede dibujar una gráfica
de F-x. En la figura 8.8 se muestra un ejemplo. Por el a) De la ec. (8.16) se tiene que el trabajo realizado es cálculo integral sabemos que la integral de F(x) entre
dos valores x1 y x2 es el área bajo la curva. Por tanto, I “2 W = 1:: Ax2 dx = Ax3/3 I x1
Aquí se usó la ecuación (4.28). I I I
W = A (xZ3 - x13)/3
y sustituyendo valores numéricos
W = -__ N (6.53 m3 - 33m3) 3 m2
5 N X m3 3 m2 = “(274.63 - 27) t
X 2
= N X m = 442.71 J Figura 8.8

el trabajo realizado por la fuerza F(x), dado por (8.161, queda representado por el área sombreada mostrada en la figura 8.8.
E l caso más general es cuando se trata de un movi- miento tridimensional en el cual cambia la fuerza que se aplica sobre el cuerpo. S i la fuerza aplicada es una función de la posición r del cuerpo, F(r) y el cuerpo re- corre cierta trayectoria (fig. 8.9), entonces tenemos la siguiente situación. La segunda ley de Newton en este caso es
F(r) m- dv dt (8.1 8)
Multipliquemos escalarmente ambos miembros de esta ecuación por la velocidad v
F -v = mv*- dv dt (8.19)
Ahora recordamos la ec. (2.45), válida para cual- quier vector, en particular para v.
V’V = ) V I 2 = v2
Tomemos la derivada de esta ecuación con respecto al t iempo t
dv dv d v V.” + __ * V = 2v-
dt dt d t
o sea,
dv dv dt dt 2v.- = 2v-
es decir,
(8.20)
Este resultado es válido para cualquier vector. Ahora sustituimos (8.20) en la ec. (8.19), obteniendo
F*v = mv- - dv - dt
Integrando ambos miembros de esta últ ima ecuación sobre el tiempo t, se tiene que
1 F - v d t = d t m v ’ ) dt
Ahora, de la ec. (5.7) tenemos que vdt = dr. Por tanto, si la fuerza se aplica entre las posiciones 1 y 2 [fig. 8.91, en las que el cuerpo tiene vectores de posición rl y r2, así como velocidades v1 y v2, respectivamente, obtenemos que
d “2 1: F-dr = 1:: dt ( + m v 2 ) d t = ( $ m v 2 ) ”1
De manera análoga a los casos anteriores, definimos el trabajo W realizado por la fuerza variable F(r) al moverse el cuerpo del punto rl al punto r2 como
W = F-dr S: (8.22)
Esta integral se evalúa a lo largo de la trayectoria que sigue el cuerpo entre los puntos 1 y 2. En esta expre- sión notamos que al llevar a cabo el cuerpo un despla- zamiento dr a lo largo de su trayectoria (fig. 8.9), la fuerza realiza el trabajo
d W = F-dr (8.23)
Figura 8.9
Esto es congruente con la ec. (8.8), ya que a lo largo del desplazamiento infinitesimal dr se puede tomar a F(r) como constante, y por tanto, de (8.8) el trabajo está dado por (8.23). E l trabajo total al moverse el cuerpo del punto 1 al punto 2 es la suma de los traba- jos dados por (8.23). Esta suma es precisamente la in- tegral dada en (8.22), que es lo que en matemáticas se llama una integral de línea. En cursos avanzados de matemáticas se enseña cómo evaluar, en general, este tipo de integrales. Sin embargo, en casos especiales se puede encontrar su valor de manera sencilla
Ejercicio 8.5. Un carro de masa 350 kg desciende a lo largo de una montaña rusa que tiene una altura de 35 m (fig. 8.10). Calcule el trabajo realizado por la fuerza gravitatoria al ir el carro del punto A al punto B. Desprecie la fricción.
Para calcular el trabajo hecho pot el peso P, Wp, utilizaremos la ec. (8.22). En este caso se tiene que, en el sistema de coordenadas mostrado en la figura 8.10
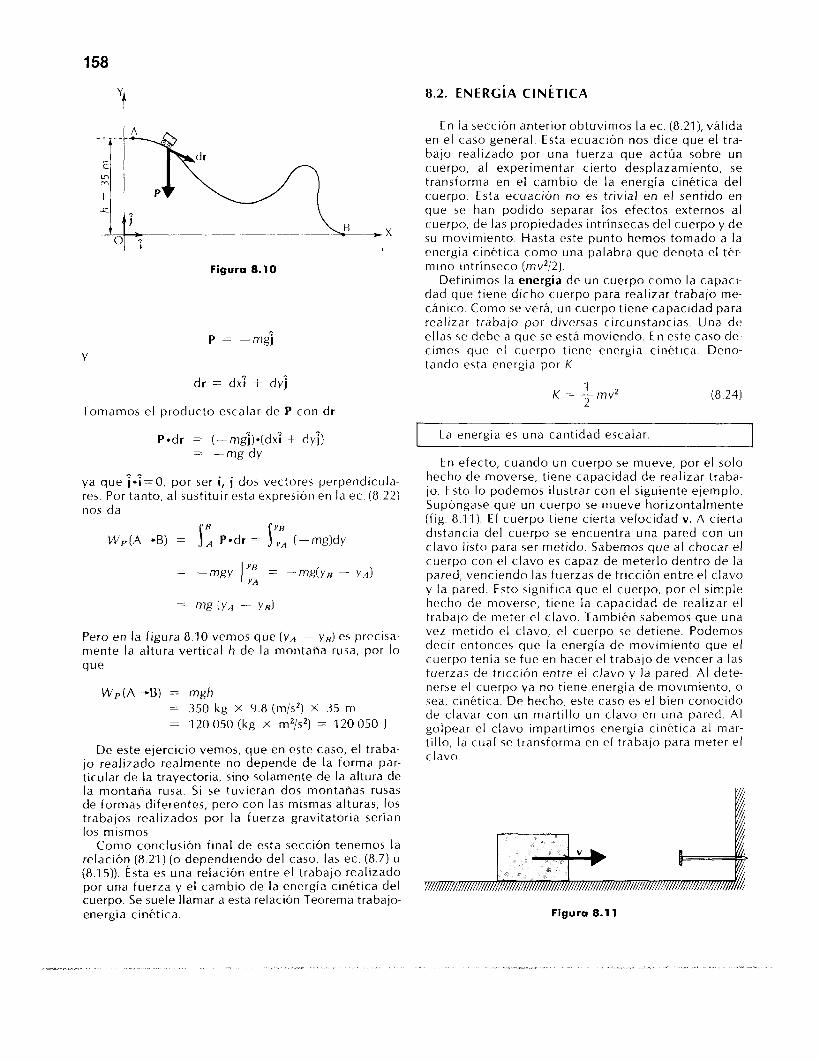
158 Yj 8.2. ENERGíA CINÉTICA
En la sección anterior obtuvlmos la ec. (8.21), válida en el caso general. Esta ecuación nos dice que el tra- bajo realizado por una fuerza que actúa sobre un cuerpo, al experimentar cierto desplazamiento, se transforma en el cambio de la energía cinética del cuerpo. Esta ecuación no es trivial en el sentido en que se han podido separar los efectos externos al cuerpo, de las propiedades intrínsecas del cuerpo y de su movimiento Hasta este punto hemos tomado a la energía cinética como una palabra que denota el tér-
Definimos la energía de un cuerpo como la capaci- dad que tiene dicho cuerpo para realizar trabajo me- cánico Como se verá, un cuerpo tiene capacidad para realizar trabajo por diversas circunstancias. Una de
p = -mgj ellas se debe a que se está moviendo. En este caso de- cimos que e l cuerpo tiene energía cinética Deno- tando esta energía por K
__ "
Figura 8.10 mino intrínseco (rnv2/2).
n
Y
dr = dx7 + d 6 1 K = - rnvz 2 (8.241
Tomamos el producto escalar de P con dr
Podr = (-rnG)*(dxi + dy?) = " m g d y
ya que ? - ? = O , por ser i, j dos vectores perpendicula- res. Por tanto, al sustituir esta expresión en la ec (8.22) nos da
R
W p ( A AB) = S A P-dr = 1: [-rng)dy
= -mgy 1 E = -rnmg(y, - Y A )
= mg ( Y A - Y R )
Pero en la figura 8.10 vemos que ( Y A - y H ) es precisa- mente la altura vertical h de la montaña rusa, por lo que
W p ( A 4 3 ) = rngh = 350 kg X 9.8 (mis2) X 35 m = 120 OSO (kg x m2/s2) = 120 050 J
De este ejercicio vemos, que en este caso, el traba- jo realizado realmente no depende de la forma par- ticular de la trayectoria, sino solamente de la altura de la montaña rusa. Si se tuvieran dos montañas rusas de formas diferentes, pero con las mismas alturas, los trabajos realizados por la fuerza gravitatoria serían los mismos.
Como conclusión final de esta sección tenemos la relació? (8.21) (o dependiendo del caso, las ec. (8.7) u (8.1s)). Esta es una relación entre el trabajo realizado por una fuerza y el cambio de la energía cinética del cuerpo. Se suele llamar a esta relación Teorema trabajo- energía cinktica.
I La energía es una cantidad escalar. I En efecto, cuando un cuerpo se mueve, por el solo
hecho de moverse, tiene capacidad de realizar traba- jo. Esto lo podemos ilustrar con el siguiente ejemplo. Supóngase que un cuerpo se mueve horizontalmente (fig. 8.11). E l cuerpo tiene cierta velocidad v. A cierta dlstancia del cuerpo se encuentra una pared con un clavo listo para ser metido. Sabemos que al chocar el cuerpo con el clavo es capaz de meterlo dentro de la pared, venciendo las fuerzas de friccion entre el clavo y la pared. Esto significa que el cuerpo, por el simple hecho de moverse, tiene la capacidad de realizar el trabalo de meter el clavo. También sabemos que una veL metldo el clavo, el cuerpo se detiene. Podemos decir entonces que la energía de movimiento que el cuerpo tenía se fue en hacer el trabajo de vencer a las fuerzas de fricción entre el clavo y la pared AI dete- nerse el cuerpo ya no tiene energía de movimiento, o sea, cinetica. De hecho, este caso es e l bien conocido de clavar con un marti l lo un clavo en una pared. AI golpear el clavo impartimos energía cinética al mar- til lo, la cual se transforma en el trabajo para meter el clavo.
Figura 8.1 1
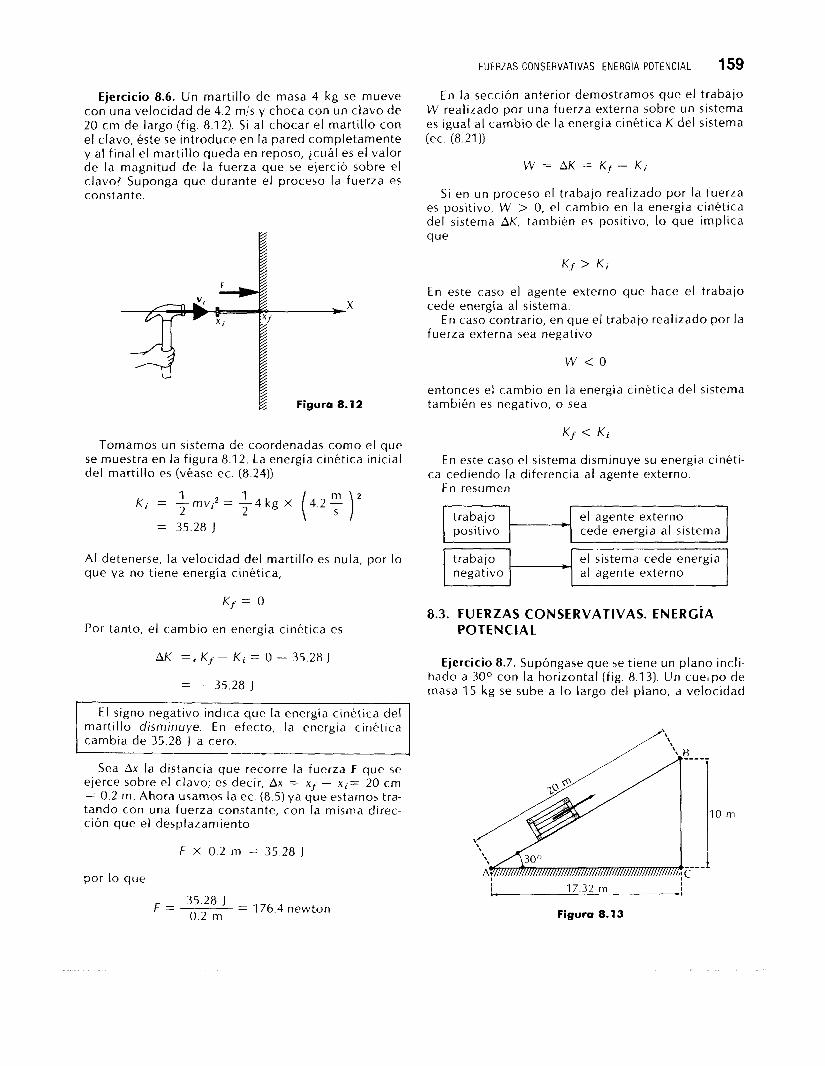
FUERZAS CONSERVATIVAS ENERGiA POTENCIAL 159
Ejercicio 8.6. Un mart i l lo de masa 4 kg se mueve con una velocidad de 4.2 mis y choca con un clavo de 20 cm de largo (fig. 8.12). Si al chocar el martillo con el clavo, éste se introduce en la pared completamente y al final el martillo queda en reposo, jcuál es el valor de la magnitud de la fuerza que se ejerció sobre el clavo? Suponga que durante el proceso la fuerza es constante.
,x
Figura 8.12
Tomamos un sistema de coordenadas como el que se muestra en la figura 8.12. La energía cinética inicial del mart i l lo es (véase ec. (8.24))
= 35.28 J
A I detenerse, la velocidad del martillo es nula, por lo que ya no tiene energía cinética,
Kf = O
Por tanto, el cambio en energía cinética es
AK =, Kf - K i = O - 35.28 J
= -35.28 J
E l signo negativo indica que la energía cinética del marti l lo disminuye. En efecto, la energía cinética cambia de 35.28 j a cero.
I " 1 Sea Ax la distancia que recorre la fuerza F que se
ejerce sobre el clavo; es decir, Ax = xf - x i = 20 cm = 0.2 m. Ahora usamos la ec. (8.5) ya que estamos tra- tando con una fuerza constante, con la misma direc- ción que el desplazamiento
F X 0.2 m = 35.28 J
por lo que
F = 35'28 ' = 176.4 newton 0.2 m
En la sección anterior demostramos que el trabajo W realizado por una fuerza externa sobre un sistema es igual al cambio de la energía cinética K del sistema (ec. (8.21))
W = AK = K f - K i
Si en un proceso el trabajo realizado por la fuerza es positivo, W > o, el cambio en la energía cinética del sistema AK, también es positivo, lo que implica que
Kf > K i
En este caso el agente externo que hace el trabajo cede energía al sistema.
En caso contrario, en que el trabajo realizado por la fuerza externa sea negativo
w < o entonces el cambio en la energía cinética del sistema también es negativo, o sea
Kf < K i
En este caso el sistema disminuye su energía cinéti-
En resumen ca cediendo la diferencia al agente externo.
trabajo
negativo el sistema cede energía trabajo
cede energía al sistema - positivo
el agente externo
al agente externo -"+
8.3. FUERZAS CONSERVATIVAS. ENERC~A POTENCIAL
Ejercicio 8.7. Supóngase que se tiene un plano incli- hado a 30° con la horizontal (fig. 8.13). Un cue,po de masa 15 kg se sube a lo largo de.1 plano, a velocidad
I I I
k r, 17.32 m
Figura 8.13
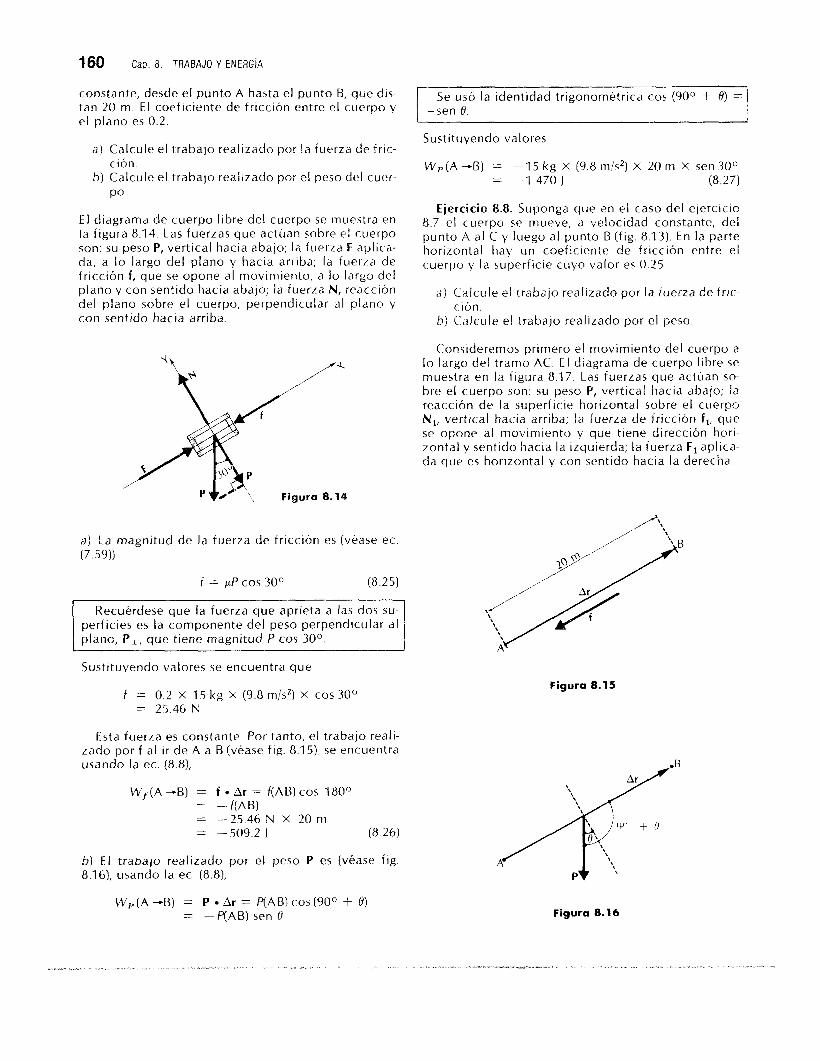
160 Cap. 8. TRABAJO Y ENERGíA
constante, desde el punto A hasta el punto 8, que dis- tan 20 m. E l coeficiente de fricción entre el cuerpo y el plano es 0.2.
a) Calcule el trabajo realuado por la fuerza de frlc-
b) Calcule el trabajo realizado por el peso del cuer- ción.
PO.
E l diagrama de cuerpo libre del cuerpo se muestra en la figura 8.14. Las fuerzas que actílan sobre el cuerpo son: su peso P, vertical hacia abajo; la fuerza F aplica- da, a lo largo del plano y hacia arriba; la fuer7a de fricción f, que se opone al movimiento, a lo largo del plano y con sentido hacia abajo; la fuerza N, reaccicin del plano sobre el cuerpo, perpendicular al plano y con sentido hacia arriba.
a) La magnitud de la fuerza de fricción es (véase ec. (7.59))
f = pP COS 30" (8.25)
Recuérdese que la fuerza que aprieta a las dos su- perficies es la componente del peso perpendicular al plano, PI, que tiene magnitud P cos 30".
Sustituyendo valores se encuentra que
I
f = 0.2 X 15 kg X (9.8 mis2) X cos 30" = 25.46 N
Esta fuerza es constante. Por tanto, el trabajo reali- zado por f al i r de A a B (véase fig. 8.15), se encuentra usando la ec. (8.8),
Wf(A AB) = f Ar = f(AB) cos 180" = -f(AB) = -25.46 N X 20 m
-509.2 J (8.26)
b) E l trabajo realizado por el peso P es (véase fig. 8.16), usando la ec. (8.8),
W p (A +3) = P Ar = P(AB) cos (90° + 8) = -P(AB) sen 8
L Se usó la identidad trigonométrica cos (90° + 8) = 1 -sen 8.
Sustituyendo valores
W p ( A 4 3 ) = -15 kg X (9.8 mis2) X 20 m X sen 30O = -1 470 J (8.27)
Ejercicio 8.8. Suponga que en el caso del ejercicio 8.7 el cuerpo se mueve, a velocidad constante, del punto A al C y luego al punto B (fig. 8.13). En la parte horizontal hay un coeficiente de fricción pntre e l cuerpo y la superficie cuyo valor er O 25
;I) Ca!cule el trabajo realizado por. la tuerza de frrc
b) (:alcule el trabajo realizado por el peso.
Consideremos primero el movimiento del cuerpo a lo largo del tramo AC. E l diagrama de cuerpo libre se muestra en Id figura 8.17. Las fuerzas que actúan so- bre el cuerpo son: su peso P, vertica! hacia abajo; fa reacción de la superficie horizontal sobre el cuerpo N,, vertical hacia arribd; la fuerza de fricción f,, que se opone al movimiento y que t iene dirección hori- zontal y sentido hacia la izquierda; la fuerza F1 aplica- da que es horizontal y con sentido hacia la derecha
ci6n.
Figura 8.15
Figura 8.16
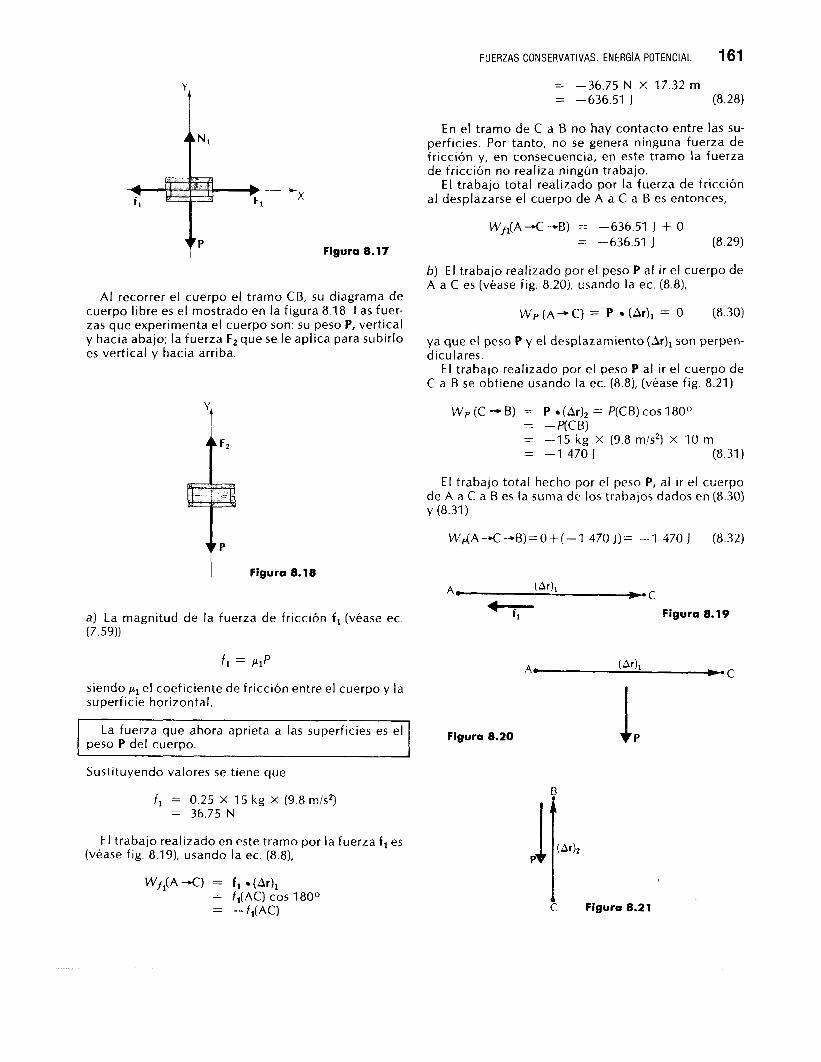
FUERZAS CONSERVATIVAS. ENERGiA POTENCIAL 161
= -36.75 N x 17.32 m = -636.51 J (8.28)
t Figura 8.17
En el tramo de C a B no hay contacto entre las su- perficies. Por tanto, no se genera ninguna fuerza de fricción y, en consecuencia, en este tramo la fuerza de fricción no realiza ningún trabajo.
E l trabajo total realizado por la fuerza de frlcción al desplazarse el cuerpo de A a C a B es entonces,
Wfl(A “c-*B) = “636.51 J + O = -636.51 J (8.29)
b) E l trabajo realizado por el peso P al ir el cuerpo de A a C es (véase fig. 8.20), usando la ec. (8.81,
AI recorrer el cuerpo el tramo CB, su diagrama de cuerpo libre es el mostrado en la f igura 8.18. Las fuer- kvp (A-+C) = P [Ar), = O (8.30) zas que experimenta el cuerpo son: su peso P, vertical Y hacia abajo; la fuerza F 2 que se le apl ica Para subirlo ya que el peso P y el desplazamiento (Ar), son perpen- es vertical y hacia arriba. diculares.
E l trabajo realizado por el peso P al ir el cuerpo de C a B se obtiene usando la ec. (8.8), (véase fig. 8.21)
I Figura 8.18
a) La magnitud de la fuerza de fricción f, (véase ec. (7.59))
f l = PIP
siendo pl el coeficiente de fricción entre el cuerpo y la superficie horizontal.
Wp (C + 6 ) = P (Ar), = P(CB) cos 180° -f(CB)
= “-15 kg X (9.8 m/s2) X 10 m = -1 470 j (8.31)
E l trabajo total hecho por el peso P, al ir el cuerpo de A a C a B es la suma de los trabajos dados en (8.30) Y (8.31 1
Wp(A-.C+B)=O+(-l 470])= -1 470 J (8.32)
Figura 8.19
I La fuerza que ahora aprieta a las superficies es el
peso P del cuerpo. I Figura 8.20
Sustituyendo valores se tiene que
f, = 0.25 X 15 kg >< (9.8 mis2) = 36.75 N
E l trabajo realizado en este tramo por la fuerza fl es (véase fig. 8.19), usando la ec. (8.8),
WfJA 4) = f , (Aril = f,(AC) cos 180° = -fl(AC)
B
P S (Arb
e C Figura 8.21
I
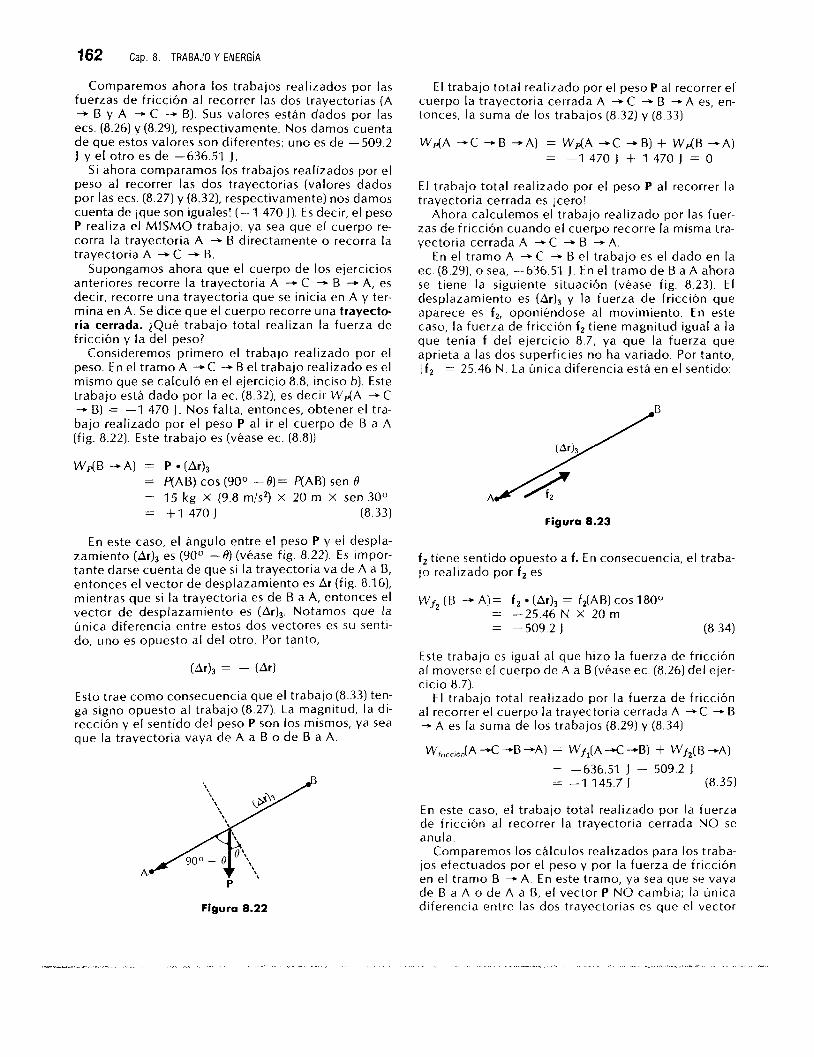
162 Cap. 8. TRABAJO Y ENERGiA
Comparemos ahora los trabajos realizados por las fuerzas de fricción al recorrer las dos trayectorias (A -+ B y A - C -+ B). Sus valores están dados por las ecs. (8.26) y (8.29), respectivamente. Nos damos cuenta de que estos valores son diferentes: uno es de -509.2 j y el otro es de -636.51 J .
S i ahora comparamos los trabajos realizados por el peso al recorrer las dos trayectorias (valores dados por las ecs. (8.27) y (8.32), respectivamente) nos damos cuenta de ¡que son iguales! (-1 470 J), E s decir, el peso P realiza el MISMO trabajo, ya sea que el cuerpo re- corra la trayectoria A + B directamente o recorra la trayectoria A + C -+ B.
Supongamos ahora que el cuerpo de los ejercicios anteriores recorre la trayectoria A -+ C + B - A, es decir, recorre una trayectoria que se inicia en A y ter- mina en A. Se dice que el cuerpo recorre una trayecto- ria cerrada. iQué trabajo total realizan la fuerza de fricción y la del peso?
Consideremos primero el trabajo realizado por el peso. En el tramo A -+C - B el trabajo realizado es el mismo que se calculó en el ejercicio 8.8, inciso b). Este trabajo está dado por la ec. (8.321, es dec i r WdA - C - B) = -1 470 J . Nos falta, entonces, obtener el tra- bajo realizado por el peso P al ir el cuerpo de B a A (fig. 8.22). Este trabajo es (véase ec. (8.8))
WdB -A ) = P (Ar), = OAB) cos (90° -O)= OAB) sen O = 15 kg X (9.8 mis2) X 20 m X sen 30° = +I 470 J (8.33)
En este caso, el ángulo entre el peso P y el despla- zamiento (Ar), es (90° -S) (véase fig. 8.22). ES impor- tante darse cuenta de que s i la trayectoria va de A a B, entonces el vector de desplazamiento es Ar (fig. 8.161, mientras que s i la trayectoria es de B a A, entonces el vector de desplazamiento es (Ar),. Notamos que la Única diferencia entre estos dos vectores es SU senti- do, uno es opuesto al del otro. Por tanto,
(Ar), = - (AT]
Esto trae como consecuencia que el trabajo (8.33) ten- ga signo opuesto al trabajo (8.27). La magnitud, la di- rección y el sentido del peso P son los mismos, ya sea que la trayectoria vaya de A a B o de B a A.
Figura 8.22
E l trabajo total realizado por el peso P al recorrer el cuerpo la trayectoria cerrada A -+ C - B - A es, en- tonces, la suma de los trabajos (8.32) y (8.33)
WdA -C - -B -A) = WdA -+C -B) + WdB -A ) = -1 470 J + 1 470 J = O
E l trabajo total realizado por el peso P al recorrer la trayectoria cerrada es ¡cero!
Ahora calculemos el trabajo realizado por las fuer- zas de fricción cuando el cuerpo recorre la misma tra- yectoria cerrada A .+ C - B -+A.
En el tramo A "+ C - B el trabajo es el dado en la ec. (8.29), o sea, -636.51 J. En el tramo de B a A ahora se tiene la siguiente situación (véase fig. 8.23). E l desplazamiento es (Ar), y la fuerza de fricción que aparece es f , , oponiéndose al movimiento. En este caso, la fuerza de fricción f2 tiene magnitud igual a la que tenía f del ejercicio 8.7, ya que la fuerza que aprieta a las dos superficies no ha variado. Por tanto, If, I = 25.46 N. La única diferencia está en el sentido:
Figura 8.23
f2 tiene sentido opuesto a f. En consecuencia, el traba- jo realizado por f 2 es
Wj2 ( 8 -+ A)= f , (Ar), = fdAB) cos 180° = -25.46 N X 20 m = -509.2 J (8.34)
Este trabajo es igual al que hizo la fuerza de fricción al moverse el cuerpo de A a B (véase ec. (8.26) del ejer- cicio 8.7).
E l trabajo total realizado por la fuerza de fricción al recorrer el cuerpo la trayectoria cerrada A - C -+ B - A es la suma de los trabajos (8.29) y (8.341
Wf,,cc,on(A -X -+E% -+A) = Wjl(A +C -+B) + Wf2(B -+A) = -636.51 J - 509.2 J = -1 145.7 J (8.35)
En este caso, el trabajo total realizado por la fuerza de fricción al recorrer la trayectoria cerrada NO se anula.
Comparemos los cálculos realizados para los traba- jos efectuados por el peso y por la fuerza de fricción en el tramo B -A . En este tramo, ya sea que se vaya de B a A o de A a B, el vector P NO cambia; la única diferencia entre las dos trayectorias es que el vector
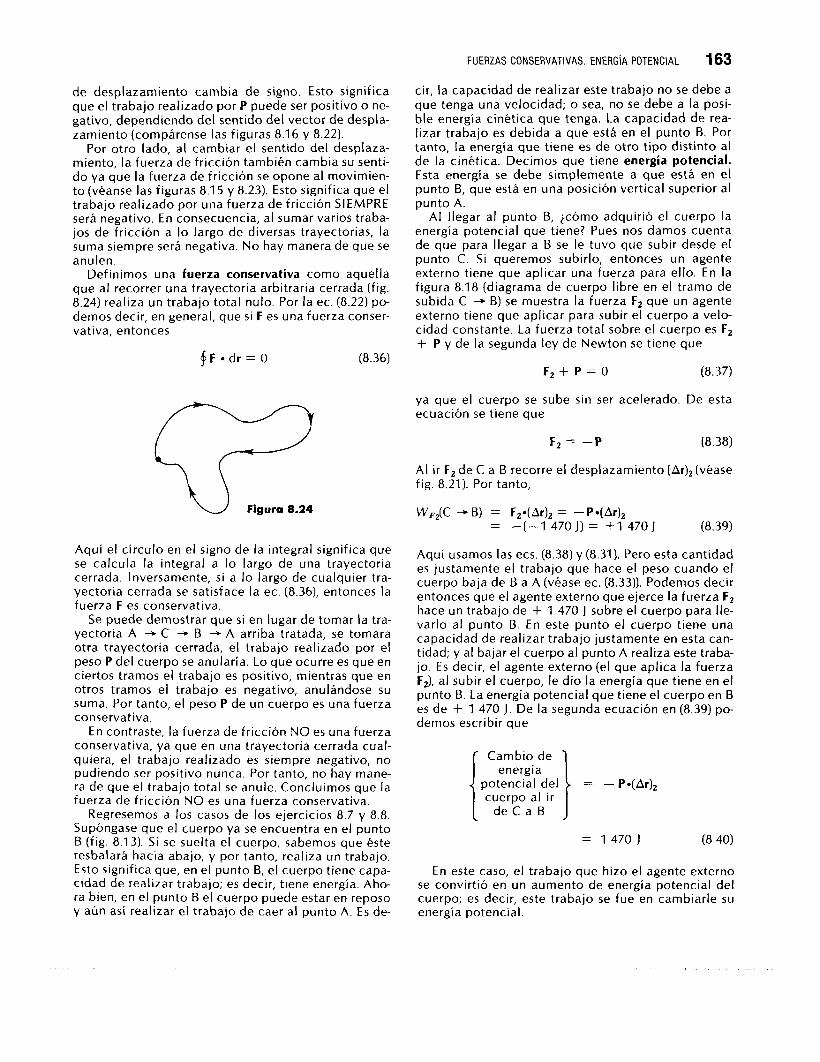
FUERZAS CONSERVATIVAS. ENERGíA POTENCIAL 163
de desplazamiento cambia de signo. Esto significa que el trabajo realizado por P puede ser positivo o ne- gativo, dependiendo del sentido del vector de despla- zamiento (compárense las figuras 8.16 y 8.22).
Por otro lado, al cambiar el sentido del desplaza- miento, la fuerza de fricción también cambia su senti- do ya que la fuerza de fricción se opone al movimien- to (véanse las figuras 8.1 5 y 8.23). Esto significa que el trabajo realizado por una fuerza de fricción SIEMPRE será negativo. En consecuencia, al sumar varios traba- jos de fricción a lo largo de diversas trayectorias, la suma siempre será negativa. No hay manera de que se anulen.
Definimos una fuerza conservativa como aquella que al recorrer una trayectoria arbitraria cerrada (fig. 8.24) realiza un trabajo total nulo. Por la ec. (8.22) po- demos decir, en general, que si F es una fuerza conser- vativa, entonces
$ F * d r = O (8.36)
Aquí el círculo en el signo de la integral significa que se calcula la integral a lo largo de una trayectoria cerrada. Inversamente, s i a lo largo de cualquier tra- yectoria cerrada se satisface la ec. (8.36), entonces la fuerza F es conservativa.
Se puede demostrar que s i en lugar de tomar la tra- yectoria A -+ C + B + A arriba tratada, se tomara otra trayectoria cerrada, el trabajo realizado por el peso P del cuerpo se anularía. Lo que ocurre es que en ciertos tramos el trabajo es positivo, mientras que en otros tramos el trabajo es negativo, anulándose su suma. Por tanto, el peso P de un cuerpo es una fuerza conservativa.
En contraste, la fuerza de fricción NO es una fuerza conservativa, ya que en una trayectoria cerrada cual- quiera, el trabajo realizado es siempre negativo, no pudiendo ser positivo nunca. Por tanto, no hay mane- ra de que el trabajo total se anule. Concluimos que la fuerza de fricción NO es una fuerza conservativa.
Regresemos a los casos de los ejercicios 8.7 y 8.8. Supóngase que el cuerpo ya se encuentra en el punto B (fig. 8.13). S i se suelta el cuerpo, sabemos que éste resbalará hacia abajo, y por tanto, realiza un trabajo. Esto significa que, en el punto B, el cuerpo tiene capa- cidad de realizar trabajo; es decir, tiene energía. Aho- ra bien, en el punto B el cuerpo puede estar en reposo y aún así realizar el trabajo de caer al punto A. Es de-
cir, la capacidad de realizar este trabajo no se debe a que tenga una velocidad; o sea, no se debe a la posi- ble energía cinética que tenga. La capacidad de rea- lizar trabajo es debida a que está en el punto B. Por tanto, la energía que tiene es de otro t ipo dist into al de la cinética. Decimos que tiene energía potencial. Esta energía se debe simplemente a que está en el punto B, que está en una posición vertical superior al punto A.
AI llegar al punto B, jcómo adquirió el cuerpo la energía potencial que tiene? Pues nos damos cuenta de que para llegar a B se le tuvo que subir desde el punto C. S i queremos subirlo, entonces un agente externo tiene que aplicar una fuerza para ello. En la figura 8.18 (diagrama de cuerpo libre en el tramo de subida C -+ B) se muestra la fuerza F, que un agente externo tiene que aplicar para subir el cuerpo a velo- cidad constante. La fuerza total sobre el cuerpo es F2 + P y de la segunda ley de Newton se tiene que
F , + P = O (8.37)
ya que el cuerpo se sube sin ser acelerado. De esta ecuación se tiene que
F 2 = -P (8.38)
Al ir F, de C a B recorre el desplazamiento (Ar), (véase fig. 8.21). Por tanto,
W,(C + B) = F2*(Ar)2 = - P*(Ar), = "(-1 470 J) = +I 470J (8.39)
Aquí usamos las ecs. (8.38) y (8.31). Pero esta cantidad es justamente el trabajo que hace el peso cuando el cuerpo baja de B a A (véase ec. (8.33)). Podemos decir entonces que el agente externo que ejerce la fuerza F, hace un trabajo de + 1 470 J sobre el cuerpo para Ile- varlo al punto B. En este punto el cuerpo tiene una capacidad de realizar trabajo justamente en esta can- tidad; y al bajar el cuerpo al punto A realiza este traba- jo. E s decir, el agente externo (el que aplica la fuerza FJ, al subir el cuerpo, le dio la energía que tiene en el punto B. La energía potencial que tiene el cuerpo en B es de + 1 470 J. De la segunda ecuación en (8.39) po- demos escribir que
Cambio de
= 1 4 7 0 J (8.40)
En este caso, el trabajo que hizo el agente externo se convirtió en un aumento de energía potencial del cuerpo; es decir, este trabajo se fue en cambiarle su energía potencial.
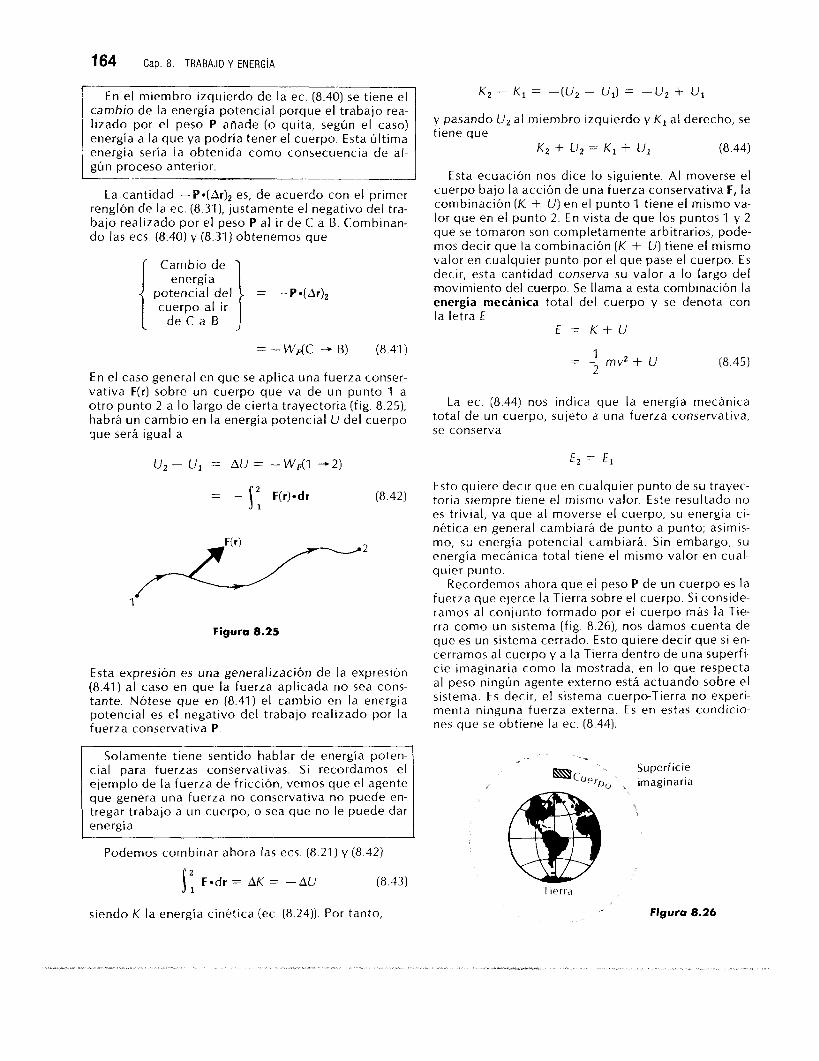
164 Cap. 8. TRABAJO Y ENERGíA
En el miembro izquierdo de la ec. (8.40) se tiene el cambio de la energía potencial porque el trabajo rea- lizado por el peso P añade (o quita, según el caso) energía a la que ya podría tener el cuerpo. Esta úl t ima energía sería la obtenida como consecuencia de al- gún proceso anterior.
La.cantidad -P*(Ar)2 es, de acuerdo con el primer renglón de la ec. (8.31), justamente el negativo del tra- bajo realizado por el peso P al ir de C a B. Combinan- do las ecs. (8.40) y (8.31) obtenemos que
Cambio de
- WdC "* B) (8.41)
En el caso general en que se aplica una fuerza conser- vativa F(r) sobre un cuerpo que va de un punto 1 a ot ro punto 2 a lo largo de cierta trayectoria (fig. 8.25), habrá un cambio en la energía potencial O del cuerpo que será igual a
F(r)*dr (8.42)
Figuro 8.25
Esta expresión es una generalización de la expresión (8.41) al caso en que la fuerza aplicada no sea cons- tante. Nótese que en (8.41) el cambio en la energía potencial es el negativo del trabajo realizado por la fuerza conservativa P.
Solamente tiene sentido hablar de energía poten- cial para fuerzas conservativas. Si recordamos el ejemplo de la fuerza de fricción, vemos que el agente que genera una fuerza no conservativa no puede en- tregar trabajo a un cuerpo, o sea que no le puede dar energía.
Podemos combinar ahora las ecs. (8.21) y (8.42)
S , F-dr = AK = -AU (8.43) 2
siendo K la energía cinética (ec. (8.24)). Por tanto,
K, - K, = -(u2 - U,) = "u' + u, y pasando Uz al miembro izquierdo y K, al derecho, se tiene que
K2 + U2 = K1 + U1 (8.44)
Esta ecuación nos dice lo siguiente. AI moverse el cuerpo bajo la acción de una fuerza conservativa F, la combinación (K. + U) en el punto I tiene el mismo va- lor que en el punto 2. En vista de que los puntos l y 2 que se tomaron son completamente arbitrarios, pode- mos decir que la combinación (K + U) tiene el mismo valor en cualquier punto por el que pase el cuerpo. E s decir, esta cantidad conserva su valor a lo largo del movimiento del cuerpo. Se llama a esta combinación la energía mecánica total del cuerpo y se denota con la letra €
E = K + U
- --mv2 + U (8.45) - I
2
La ec. (8.44) nos indica que la energía mecánica total de un cuerpo, sujeto a una fuerza conservativa, se conserva
E , =
Esto quiere decir que en cualquier punto de su trayec- toria siempre tiene el mismo valor. Este resultado no es trivial, ya que al moverse el cuerpo, su energía ci- nética en general cambiará de punto a punto; asimis- mo, su energía potencial cambiará. Sin embargo, su energía mecánica total tiene el mismo valor en cual- quier punto.
Recordemos ahora que el peso P de un cuerpo es la fuerza que ejerce la Tierra sobre el cuerpo. Si conside- ramos al conjunto formado por el cuerpo más la Tie- rra como un sistema (fig. 8.26), nos damos cuenta de que es un sistema cerrado. Esto quiere decir que s i en- cerramos al cuerpo y a la Tierra dentro de una superfi- cie imaginaria como la mostrada, en lo que respecta al peso ningún agente externo está actuando sobre el sistema. E s decir, el sistema cuerpo-Tierra no experi- menta ninguna fuerza externa. Es en estas condicio- nes que se obtiene la ec. (8.44).
Figuro 8.26

ALGUNAS APLICACIONES 165
De manera general, la ec. (8.44) es solamente válida s i el sistema que se esté considerando es un sistema cerrado; es decir, un sistema que no experimente fuer- zas ajenas a él. Podemos entonces expresar el siguien- te resultado.
PRINCIPIO DE CONSERVACIóN DE LA ENERGíA MECANICA: En un sistema cerrado en el que actúan fuerzas conservativas la energía mecánica total se conserva.
S i las fuerzas que actúan en un sistema no son con- servativas, entonces la energía mecánica total no se conserva. En particular, resulta claro que en este caso ni siquiera se puede hablar de una energía potencial.
Wp(A d B ) = P-Ar = PIAr l cos18Oo = -PI Ar I = - f l y , - YA) (8.48)
Sustituyendo esta cantidad en la ec. (8.47) nos da
Ahora pasamos al miembro izquierdo Py,(pasa con sig- no negativo), y al miembro derecho Ua (pasa con signo positivo)
con dirección vertical y sentido hacia abajo. Para obtener la energía potencial usamos la ec.
(8.42). Para este fin necesitamos considerar una tra- yectoria y dos puntos en ella, el inicial A y el f inal B. Dado que el peso es una fuerza conservativa, pode- mos considerar cualquier trayectoria que vaya de A a B. Tomemos la más sencilla que es una línea vertical (fig. 8.27). Asimismo, tomemos un sistema de coor- denadas, en este caso vertical, con el origen O en el suelo y sentido hacia arriba. La coordenada de A es y la de B, ye.
Suelo
I Figura 8.27
La constante que aquí aparece se determina de mane- ra convencional. Para los resultados físicos que de esta ecuación se obtengan, el valor de esta constante no tiene ninguna consecuencia. Determinaremos esta constante tomando la energía potencial al nivel del suelo como cero; esto es,
U(y = O) = o Evaluando la ec. (8.50) para y = O obtenemos que el valor de la constante es cero. Por tanto, de la ec. (8.50)
U(y) = Py = mgy (8.51)
Aquí se usó la ec. (8.46) para el peso del cuerpo. Éste es el valor de la energía potencial debida al peso de un cuerpo de masa m. Vemos que solamente depende de la altura y sobre el nivel, en nuestro caso el suelo, en que se encuentre el cuerpo.
E l cero de la energía potencial se escoge de manera arbitraria. Esta selección no tiene ningún efecto sobre los resultados físicos, ya que la definición de energía potencial está dada en términos de su cambio (véase ec. (8.42)). La cantidad física que se mide en un experi- mento es el trabajo realizado por la fuerza. Por tanto, añadir una constante arbitraria a la energía potencial no afecta las conclusiones físicas.
Usando la ec. (8.42) se tiene que En el ejercicio anterior se obtuvo la energía poten-
cial de la gravedad. Sustituyendo el valor (8.51) en la ec. (8.45) encontramos que la energía mecánica es, en
UB - UA = AU = - Wp (A - B) (8.47) este caso,
Ahora calculamos el trabajo realizado por la fuerza P al ir de A a B (véase ec. (8.8)) -mv2 + mgy = E
1 2 (8.52)
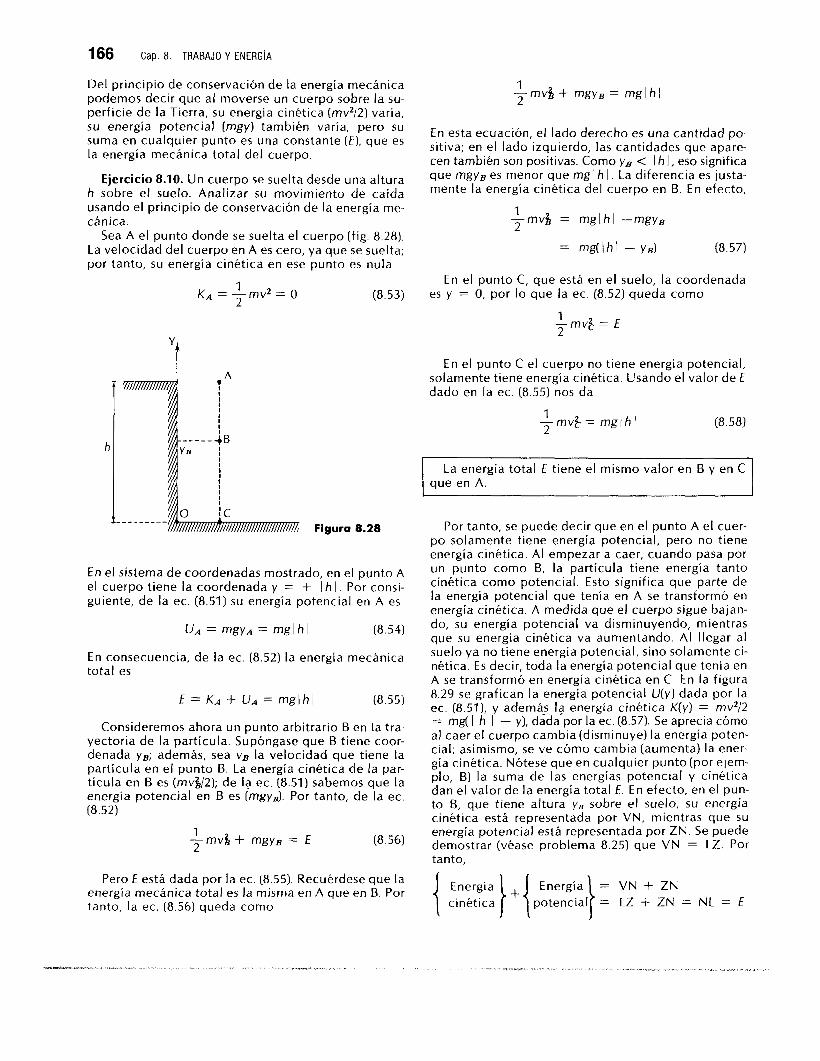
166 Cap. 8. TRABAJO Y ENERGiA
Del principio de conservación de la energía mecánica podemos decir que al moverse un cuerpo sobre la su- perficie de la Tierra, su energía cinética (mv2/2) varía, su energía potencial (mgy) también varía, pero su suma en cualquier punto es una constante (€), que es la energía mecánica total del cuerpo.
Ejercicio 8.10. Un cuerpo se suelta desde una altura h sobre el suelo. Analizar su movimiento de caída usando el principio de conservación de la energía me- cánica.
Sea A el punto donde se suelta el cuerpo (fig. 8.28). La velocidad del cuerpo en A es cero, ya que se suelta; por tanto, su energía cinética en ese punto es nula
1 2
K A = - m V 2 = 0 (8.53)
En esta ecuación, el lado derecho es una cantidad po- sitiva; en el lado izquierdo, las cantidades que apare- cen también son positivas. Como YB < 1 h I, eso significa que mgy, es menor que mgl h I . La diferencia es justa- mente la energía cinética del cuerpo en B. En efecto,
En el punto C, que está en el suelo, la coordenada es y = O, por lo que la ec. (8.521 queda como
'f
La energía total E tiene el mismo valor en B y en c que en A.
En el sistema de coordenadas mostrado, en el punto A el cuerpo tiene la coordenada y = + I h I . Por consi- guiente, de la ec. (8.51) su energía potencial en A es
UA = mgyA = mg I h I (8.54)
En consecuencia, de la ec. (8.52) la energía mecánica total es
Consideremos ahora un punto arbitrario B en la tra- yectoria de la partícula. Supóngase que B tiene coor- denada ye; además, sea V, la velocidad que tiene la partícula en el punto B . La energía cinética de la par- tícula en B es (mv&/2); de la ec. (8.51) sabemos que la energía potencial en B es (mgys). Por tanto, de la ec. (8.52)
Pero E está dada por la ec. (8.55). Recuérdese que la energía mecánica total es la misma en A que en B. Por tanto, la ec. (8.56) queda como
-mv$ = E 2 I
En el punto C el cuerpo no tiene energía potencial, solamente tiene energía cinética. Usando el valor de E dado en la ec. (8.55) nos da
1 2 = mglh I (8.581
Por tanto, se puede decir que en el punto A el cuer- po solamente tiene energía potencial, pero no tiene energía cinética. AI empezar a caer, cuando pasa por un punto como B, la partícula tiene energía tanto cinética como potencial. Esto significa que parte de la energía potencial que tenía en A se transformó en energía cinética. A medida que el cuerpo sigue bajan- do, su energía potencial va disminuyendo, mientras que su energía cinética va aumentando. AI llegar al suelo ya no tiene energía potencial, sino solamente ci- nética. Es decir, toda la energía potencial que tenía en A se transformó en energía cinética en C. En la figura 8.29 se grafican la energía potencial U(y) dada por la ec. (8.511, y ademá? I? energía cinética K(y] = mv2/2 = mgt I h 1 - y), dada por la ec. (8.57). Se aprecia cómo al caer el cuerpo cambia (disminuye) la energía poten- cial; asimismo, se ve cómo cambia (aumenta) la ener- gía cinética. Nótese que en cualquier punto (por ejem- plo, B) la suma de las energías potencial y cinética dan el valor de la energía total E. En efecto, en el pun- to B, que tiene altura ys sobre el suelo, su energía cinética está representada por VN, mientras que SU energía potencial está representada por ZN. Se puede demostrar (véase problema 8.25) que VN = LZ. Por tanto,
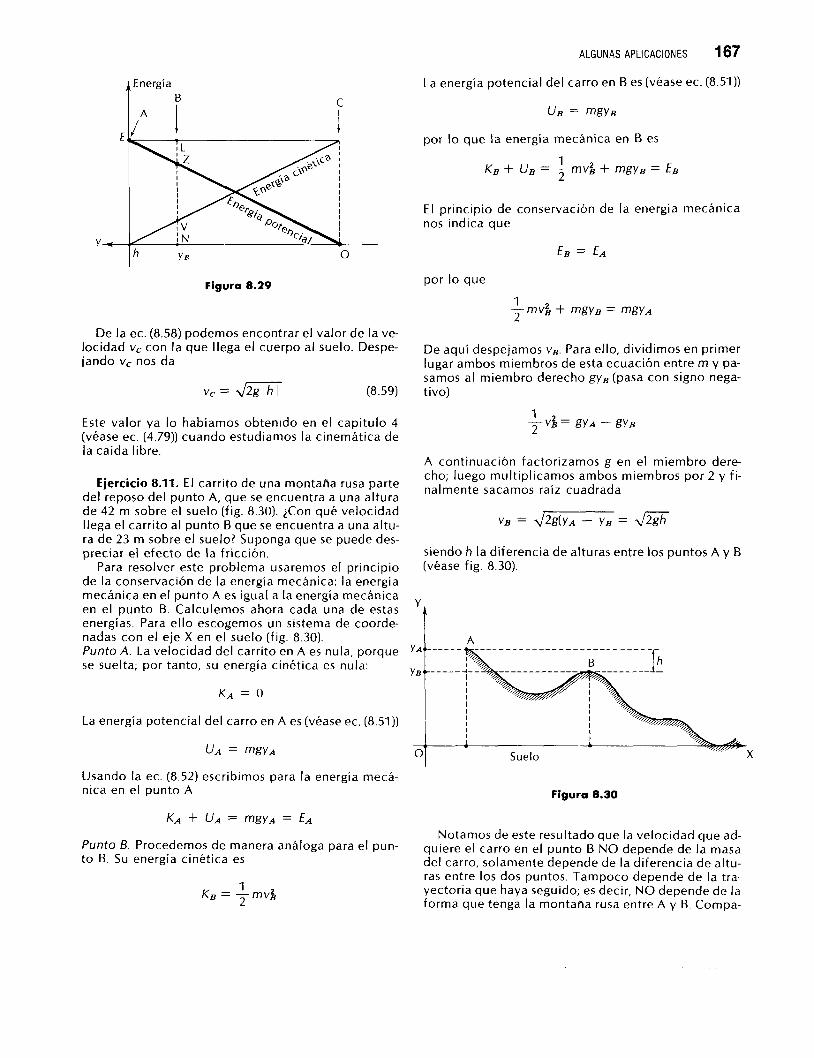
ALGUNAS APLICACIONES 167
E
Y-
Energía B C
I
h Y B O
Figura 8.29
De la ec. (8.58) podemos encontrar el valor de la ve- locidad vc con la que llega el cuerpo al suelo. Despe- iando vc nos da
(8.59)
Este valor ya lo habíamos obtenrdo en el capítulo 4 (véase ec. (4.79)) cuando estudiamos la cinemática de la caída libre.
Ejercicio 8.11. E l carrito de una montana rusa parte del reposo del punto A, que se encuentra a una altura de 42 m sobre el suelo (fig. 8.30). icon qué velocidad llega el carrito al punto B que se encuentra a una altu- ra de 23 m sobre el suelo? Suponga que se puede des- preciar el efecto de la fricción.
Para resolver este problema usaremos el principio de la conservación de la energía mecánica: la energía mecánica en el punto A es igual a la energía mecánica en el punto B. Calculemos ahora cada una de estas energía:. Para ello escogemos un sistema de coorde- nadas con el eje X en el suelo (fig. 8.30). Punto A. La velocidad del carrito en A es nula, porque se suelta; por tanto, su energía cinética es nula:
K A = O
La energía potencial del carro en A es (véase ec. (8.51))
U A = mgyA
Usando la ec. (8.52) escribimos para la energía mecá- nica en el punto A
Punto B. Procedemos de manera análoga para el pun- to B. Su energía cinética es
1 K B = --vi 2
La energía potencial del carro en B es (véase ec. (8.51))
UB = mgyB
por lo que la energía mecánica en B es
1 2 K B + U, = - mv& + mgy, = EB
E l principio de conservación de la energía mecánica nos indica que
E , = E*
por lo que
1 - mvi + mgy, = mgyA 2
De aquí despejamos vB. Para ello, dividimos en primer lugar ambos miembros de esta ecuación entre m y pa- samos al miembro derecho g y B (pasa con signo nega- tivo)
1 v& = gyA - g y B
A continuación factorizamos g en el miembro dere- cho; luego multiplicamos ambos miembros por 2 y fi- nalmente sacamos raíz cuadrada
siendo h la diferencia de alturas entre los puntos A y B (véase fig. 8.30).
Y i
A
I I I
Figura 8.30
Notamos de este resultado que la velocidad que ad- quiere el carro en el punto B NO depende de la masa del carro, solamente depende de la diferencia de altu- ras entre los dos puntos. Tampoco depende de la tra- yectoria que haya seguido; es decir, NO depende de la forma que tenga la montaila rusa entre A y B. Compa-
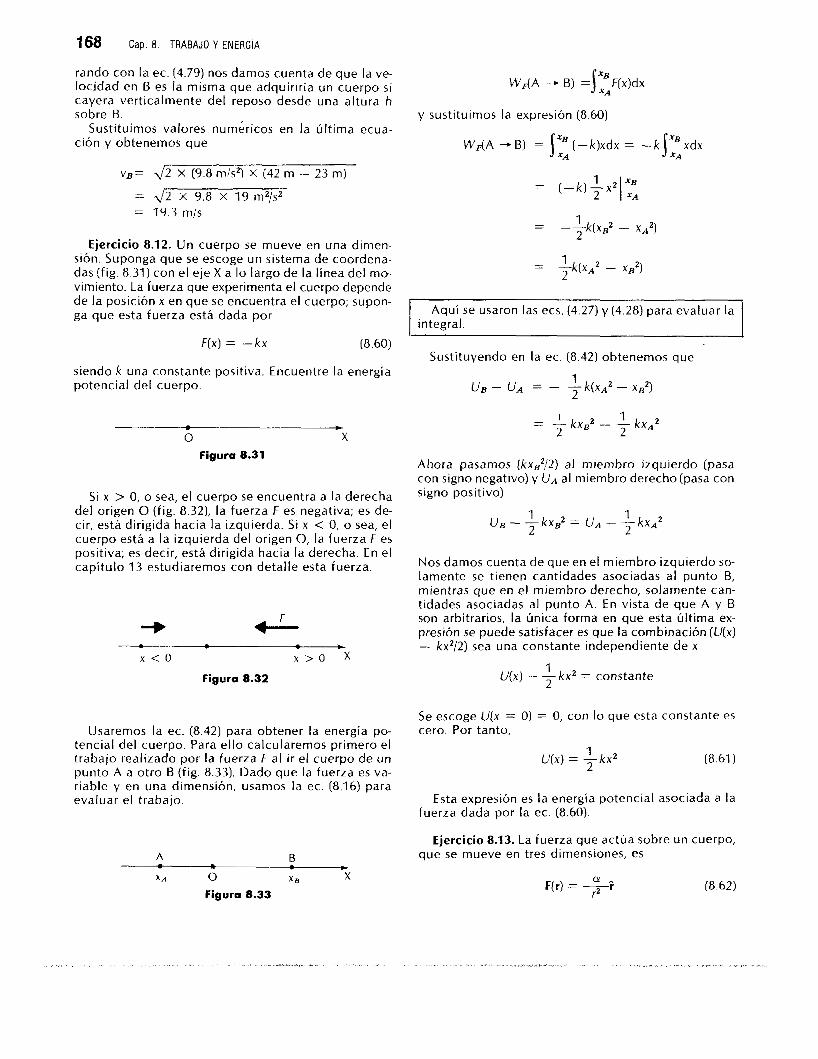
168 Cap. 8. TRABAJO Y ENERGiA
rando con la ec. (4.79) nos damos cuenta de que la ve- locidad en B es la misma que adquiriría un cuerpo s i cayera verticalmente del reposo desde una altura h sobre B.
Sustituimos valores numéricos en ta ultima ecua- ción y obtenemos que
vE= 4-8 rnls21 X (42 m - 23 m)
= 4 2 X 9.8 X 19 m2/sz = 19.3 m/s
Ejercicio 8.12. Un cuerpo se mueve en una dimen- sión. Suponga que se escoge un sistema de coordena- das (fig. 8.31) con el eje X a lo largo de la línea del mo- vimiento. La fuerza que experimenta el cuerpo depende de la posición x en que se encuentra el cuerpo; supon- ga que esta fuerza está dada por
F(x) = -kx (8.60)
siendo k una constante positiva. Encuentre la energía potencial del cuerpo.
o X Figura 8.31
Si x > O, o sea, el cuerpo se encuentra a la derecha del origen O (fig. 8.321, la fuerza F es negativa; es de- cir, está dirigida hacia la izquierda. Si x < O, o sea, el cuerpo está a la izquierda del origen O, la fuerza F es positiva; es decir, está dirigida hacia la derecha. En el capítulo 1 3 estudiaremos con detalle esta fuerza.
-P F - - \
x < o x > o x Figuro 8.32
Usaremos la ec. (8.42) para obtener la energía po- tencial del cuerpo. Para ello calcularemos primero el trabajo realizado por la fuerza F al ir el cuerpo de un punto A a otro B (fig. 8.33). Dado que la fuerza es va- riable y en una dimensión, usamos la ec. (8.16) para evaluar el trabajo.
A B
A A O xi3 X - L *
Figuro 8.33
WAA - B) =lxEF(x)dx *A
y sustituimos la expresión (8.60)
WAA -B) = 1" (-k)xdx = -kjxExdx XA XA
- - --k(XB2 - XA2) I
2
1 = -k(XA2 2 - Xg')
Aquí se usaron las ecs. (4.27) y (4.28) para evaluar la integral.
Sustituyendo en la ec. (8.42) obtenemos que
Ahora pasamos ( k x E 2 / 2 ) al miembro izquierdo (pasa con signo negativo) y UA al miembro derecho (pasa con signo positivo)
1 U g - - kXB2 = UA - - kXA2 1
2 2
Nos damos cuenta de que en el miembro izquierdo so- lamente se tienen cantidades asociadas al punto B, mientras que en el miembro derecho, solamente can- tidades asociadas al punto A. En vista de que A y B son arbitrarios, la única forma en que esta últ ima ex- presión se puede satisfacer es que la combinación (U(x) - kx2/2) sea una constante independiente de x
1 2 U(x) - --x2 = constante
Se escoge U(x = O) = O, con lo que esta constante es cero. Por tanto,
U(X) = --x2 I
2 (8.61)
Esta expresión es la energía potencial asociada a la fuerza dada por la ec. (8.60).
Ejercicio 8.13. La fuerza que actúa sobre un cuerpo, que se mueve en tres dimensiones, es
F(r) = -7 (Y
r2 (8.62)
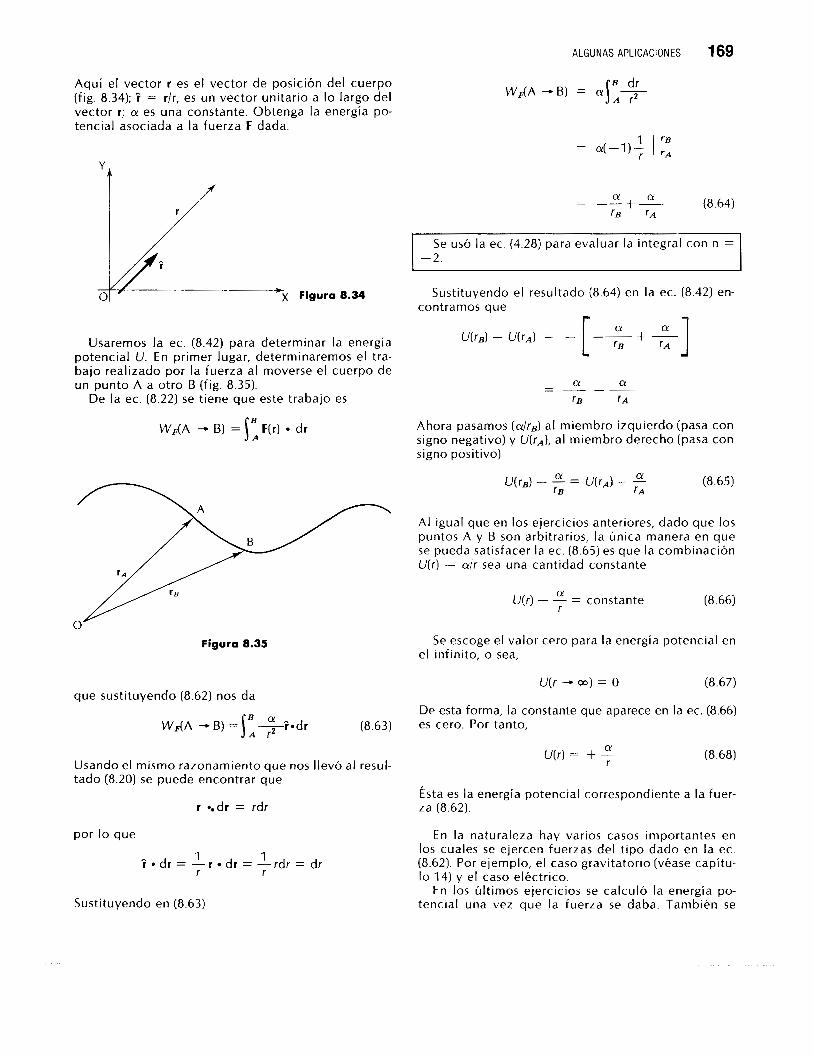
ALGUNAS APLICACIONES 169
Aquí el vector r es el vector de posición del cuerpo (fig. 8.34); 3 = rlr, es un vector unitario a lo largo del vector r; Q es una constante. Obtenga la energía po- tencial asociada a la fuerza F dada.
V
Usaremos la ec. (8.42) para determinar la energía potencial U. En primer lugar, determinaremos el tra- bajo realizado por la fuerza al moverse el cuerpo de un punto A a otro B (fig. 8.35).
De la ec. (8.22) se tiene que este trabajo es
- - -- C Y C Y t- (8.64) rA
Se usó la ec. (4.28) para evaluar la integral con n = -2.
b
Sustituyendo el resultado (8.64) en la ec. (8.42) en- contramos que
c
Ahora pasamos (a/rB) al miembro izquierdo (pasa con signo negativo) y u(rA), al miembro derecho (pasa con signo positivo)
ff U(rB) - - = U(rA) - - (8.65) 01
rA rB
AI igual que en los ejercicios anteriores, dado que los puntos A y B son arbitrarios, la única manera en que se pueda satisfacer la ec. (8.65) es que la combinación U(r) - a/r sea una cantidad constante
CY U(r) - - = constante (8.66) r
Figura 8.35 Se escoge el valor cero para la energía potencial en el infinito, o sea,
U(r - m) = O (8.67)
De esta forma, la constante que aparece en la ec. (8.66) que sustituyendo (8.62) nos da
(8.63) es cero. Por tanto,
CY U(r) = + - (8.68) Usando el mismo razonamiento que nos llevó al resul- r tad0 (8.20) se puede encontrar que
ÉSta es la energía potencial correspondiente a la fuer- r dr = rdr za (8.62).
por lo que
1 1 3 * d r = - r * d r = - r d r = d r r r
Sustituyendo en (8.63)
En la naturaleza hay varios casos importantes en los cuales se ejercen fuerzas del tipo dado en la ec. (8.62). Por ejemplo, el caso gravitatorio (véase capítu- lo 14) y el caso eléctrico.
En los últimos ejercicios se calculó la energía po- tencial una vez que l a fuerza se daba. También se

170 Cap. 8. TRABAJO Y ENERGiA
puede proceder de manera inversa, a saber, s i se da la energía potencial U uno puede encontrar la fuerza correspondiente. En efecto, tratemos por simplicidad, el caso de una dimensión. Tomemos un sistema de coordenadas, como se muestra en la figura 8.36. Con- sideremos dos puntos A y B muy próximos entre sí, de tal forma que la fuerza f(x) casi no varíe al i r de A a B. Las coordenadas de A y de B son
A B - - - - O X x + dx *X
Figura 8.36
La separación entre A y B es dx. E l trabajo dW realiza- do por la fuerza f(x) al desplazarse de A a B es (véase ec. (8.8))
Ejercicio 8.15. La energía potencial que tiene un cuerpo es, en un sistema de coordenadas en una di- mensión,
U(X) = k X 4
siendo k una constante. Calcule la fuerza aplicada al cuerpo.
Usando la ec. (8.69) obtenemos que
d (kx4) F(x) = -7 X
= -4kX3
8.5. POTENCIA
Como se estudió en secciones anteriores, cuando una fuerza se desplaza, en general realiza un trabajo. Ahora bien, el desplazamiento de la fuerza ocurre en cierto intervalo de tiempo. Supóngase que una fuerza F se aplica sobre un cuerpo y que este se desplaza dr en un t iempo dt. E l trabajo realizado es
d W = F(x) dx d W = F dr
Pero al ir de A a B hay un cambio en la energía poten- cial dU. Usamos la ec. (8.42) para calcular este cam- Y el trabajo por unidad de tiempo es bio
d W = - dU p=" d W - dr
dt dt F e - = F * v (8.70)
o sea Aquí se usó la ec. (5.7) que nos da la velocidad v del cuerpo. La cantidad P así definida es la potencia de- sarrollada por la fuerza F.
En el Sistema Internacional de Unidades, la unidad de potencia es el watt (W).
f(x) dx = - dU
por lo que
dU dx f(x) = - - (8.69) 1 w (8.71)
potencia
Esta ecuación nos dice que s i conocemos la energía potencial U(x), tomando el negativo de su derivada Ejercicio 8.16. UII agente realiza un trabajo de 247 J
F(x) aplicada. De la definición de potencia se tiene que con respecto a la posición x, obtendremos la fuerza en un tiemPo de 3.2 S . ¿QUé Potencia desarrolla?
Ejercicio 8.14. Si la energía potencial es constante,
En este caso
W - 247 J - 77,2
jcuál es la fuerza aplicada? At 3.2 S
Ejercicio 8.17. Jn motor t iene una potencia de 7 528 W. jQué trabajo desarrolla s i funciona durante 4 h?
U(x) = constante
por lo que de la ec. (8.69) encontramos que De la definición (8.70) de potencia se tiene que el trabajo W desarrollado en el intervalo At es
d constante F(x) = dx W = PAt (8.72)
= o y sustituyendo valores
La fuerza es nula. P = 7 528 W; At = 4 h = 4 X 3 600 S = 14 400 S
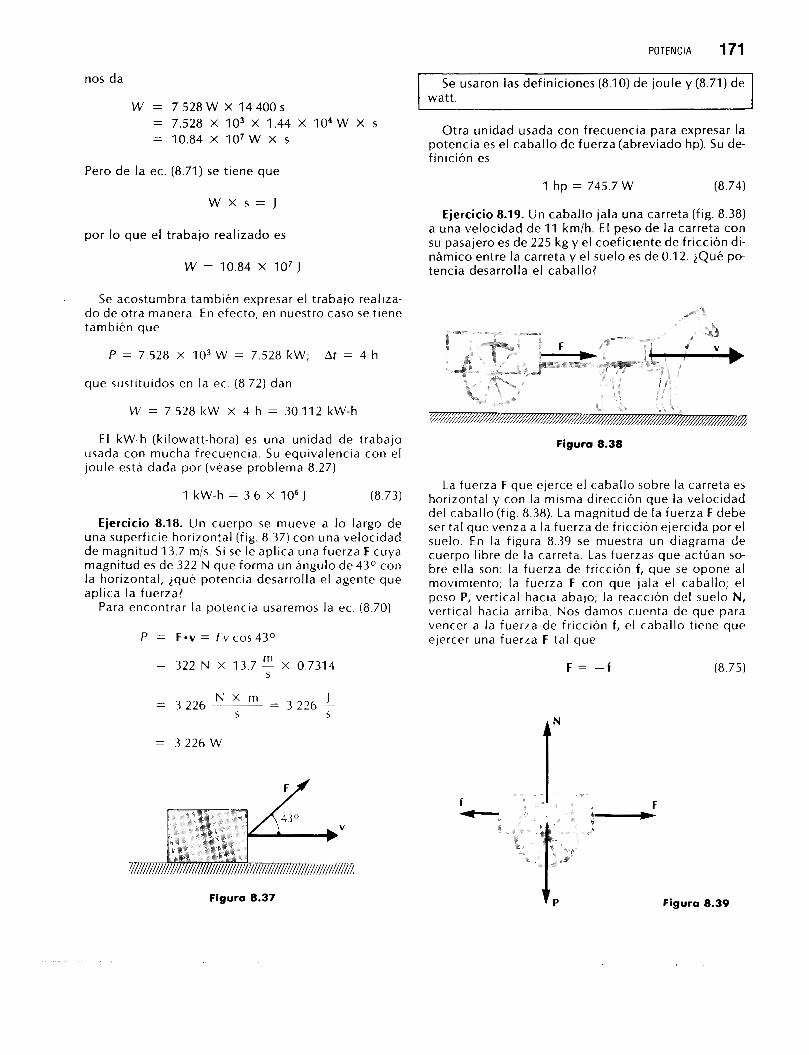
POTENCIA 171 nos da
W = 7 5 2 8 W X 1 4 4 0 0 s
= 10.84 X I O 7 W X S
= 7.528 X 103 X 1.44 x 1 0 4 w X S
I Se usaron las definiciones (8.10) de joule y (8.71) de watt. I
Otra unidad usada con frecuencia para expresar la potencia es el caballo de fuerza (abreviado hp). Su de- finición es
Pero de la ec. (8.71) se tiene que 1 hp = 745.7 W (8.74)
w x s = j
por lo que el trabajo realizado es
W = 10.84 X I O 7 J
Se acostumbra también expresar el trabajo realiza- do de otra manera. En efecto, en nuestro caso se tiene también que
P = 7.528 x I O 3 W = 7.528 kW; At = 4 h
que sustituidos en la ec. (8.72) dan
W = 7.528 k W X 4 h = 30.112 kW-h
E l kW-h (kilowatt-hora) es una unidad de trabajo usada con mucha frecuencia. Su equivalencia con el joule está dada por (véase problema 8.27)
1 kW-h = 3.6 X I O 6 j (8.73)
Ejercicio 8.18. Un cuerpo se mueve a lo largo de una superficie horizontal (fig. 8.37) con una velocidad de magnitud 13.7 mis. S i se le aplica una fuerza F cuya magnitud es de 322 N que forma un ángulo de 43O con la horizontal, iqué potencia desarrolla el agente que aplica la fuerza?
Para encontrar la potencia usaremos la ec. (8.70)
P = F * v = f v cos43O
m = 322 N X 13.7 X 0.7314
N x m J = 3 226 = 3 226 - S S
Ejercicio 8.19. Un caballo jala una carreta (fig. 8.38) a una velocidad de 11 km/h. E l peso de la carreta con su pasajero es de 225 kg y el coeficiente de fricción di- námico entre la carreta y el suelo es de 0.1 2. iQué po- tencia desarrolla el caballo?
Figura 8.38
La fuerza F que ejerce el caballo sobre la carreta es horizontal y con la misma dirección que la velocidad del caballo (fig. 8.38). La magnitud de la fuerza F debe ser tal que venza a la fuerza de fricción ejercida por el suelo. En la figura 8.39 se muestra un diagrama de cuerpo libre de la carreta. Las fuerzas que actúan so- bre ella son: la fuerza de fricción f , que se opone al movimiento; la fuerza F con que jala el caballo; el peso P, vertical hacia abajo; la reacción del suelo N, vertical hacia arriba. Nos damos cuenta de que para vencer a la fuerza de fricción f , el caballo tiene que ejercer una fuerza F tal que
F = “f (8.75)
= 3 226 W
Figura 8.37 Figura 8.39

172 Cap. 8. TRABAJO Y ENERGíA
Es decir, la magnitud de la fuerza F es la misma que la magnitud de la fuerza de fricción f. Pero recordamos que (véase ec. (7.59)) la magnitud de la fuerza de fric- ción es el producto del coeficiente de fricción por la magnitud de la fuerza que aprieta. En nuestro caso, la fuerza que aprieta es el peso de la carreta. Por tanto,
que sustituyendo valores nos da
F -- 0.12 X 225 k g X 9.8 mis2 = 264.6 N
Por otro lado, la velocidad del caballo es
k m m h v = l l - - - 3.06-
S
Por tanto, de la ec. (8.70) se tiene que la potencia de- sarrollada por el caballo es
P = F * v FV cosoo
= 264.6 N X 3.06 - m S
= 808.5 W
Pero la definición (8.74) se tiene que
1 1 w = - 745.7 hp
745.7 hp
por lo que
P = 808.5 X - 1
= 1.08 hp
Ejercicio 8.20. Una máquina que entrega una poten- cia constante P acelera un cuerpo de masa m. Si ini- cialmente el cuerpo está en reposo, obtenga la distan- cia L recorrida por el cuerpo en el tiempo t .
De la ec. (8.70) despejamos el trabajo d W realizado por la máquina en el tiempo dt
d W = P dt
Por otro lado, del teorema trabajo-energía cinética (véase sección 8.1) se tiene que (véase ec. (8.21))
d W = dK
siendo dK el cambio de la energía cinética. Por tanto,
dK = P dt
Integramos ahora esta relación, recordando que la po- tencia P es constante
j z o d K = 5 ' O P d t
o sea,
K-K,,= P l t d t = O Pt
, 1
Se usaron las ecs. (4.27) y (4.28). I Aquí KO es el valor de la energía cinética inicial, que en nuestro caso es cero, ya que el cuerpo parte del re- poso. Se tiene entonces que
1
K = L m v 2 = Pt 2
De esta ecuación despejamos la velocidad v. Mul t ip l i - camos ambos lados de la últirna ecuación por (2/m) y sacamos raíz cuadrada
- dx "
d t
Aquí se usó la ec. (3.18). Ahora despejamos dx
Integrando ambos lados de esta ecuación (la variable x va de O a L , mientras t va de O a t )
Aquí se usó el resultado (4.28)
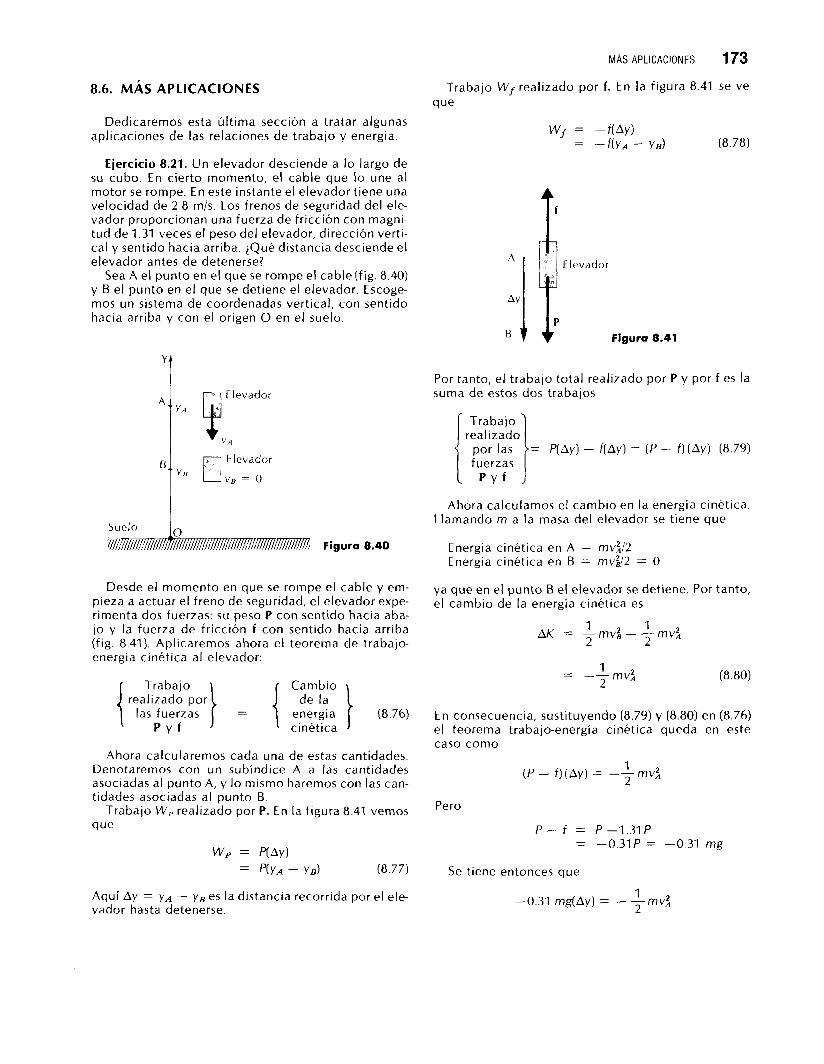
MAS APLICACIONES 173
8.6. MÁS APLICACIONES
Dedicaremos esta última sección a tratar algunas aplicaciones de las relaciones de trabajo y energía.
Ejercicio 8.21. Un elevador desciende a lo largo de su cubo. En cierto momento, el cable que lo une al motor se rompe. En este instante el elevador tiene una velocidad de 2.8 m/s. Los frenos de seguridad del ele- vador proporcionan una fuerza de fricción con magni- tud de 1.31 veces el peso del elevador, dirección verti- cal y sentido hacia arriba. iQué distancia desciende el elevador antes de detenerse?
Sea A el punto en el que se rompe el cable (fig. 8.40) y B el punto en el que se detiene el elevador. Escoge- mos un sistema de coordenadas vertical, con sentido hacia arriba y con el origen O en el suelo.
't A 1 Ya Elevador
Figura 8.40
Desde el momento en que se rompe el cable y em- pieza a actuar el freno de seguridad, el elevador expe- rimenta dos fuerzas: su peso P con sentido hacia aba- jo y la fuerza de fricción f con sentido hacia arriba (fig. 8.41). Aplicaremos ahora el teorema de trabajo- energía cinética al elevador:
Trabajo Cambio r ? ~ ~ i ~ ~ ~ z ~ ~ r = cinética e:E/;a (8.76)
Ahora calcularemos cada una de estas cantidades. Denotaremos con un subíndice A a las cantidades asociadas al punto A, y lo mismo haremos con las can- tidades asociadas al punto B.
Trabajo W p realizado por P. En la f igura 8.41 vemos que
W P = RAY) = RY, - Ye) (8.77)
Aquí Ay = ya - ye es la distancia recorrida por el ele- vador hasta detenerse.
Trabajo W, realizado por f . En la figura 8.41 se ve que
Wf = -f(Ay) = "f(Y.4 - Ys) (8.78)
Figura 8.41
Por tanto, el trabajo total realizado por P y por f es la suma de estos dos trabajos
Trabajo realizado [ ;;;;; I= RAY) - /(Ay) = (P - fl(AY) (8.79)
Ahora calculamos el cambio en la energía cinética. Llamando m a la masa del elevador se tiene que
Energía cinética en A = mv?1/2 Energía cinética en B = mv$/2 = O
ya que en el punto B el elevador se detiene. Por tanto, el cambio de la energía cinética es
1 1 2 2
AK = - m v ~ - - m v ~
1 - --mvi
2 - (8.80)
En consecuencia, sustituyendo (8.79) y (8.80) en (8.76) el teorema trabajo-energía cinética queda en este caso como
Pero
P - f = P-1.31P = -0.31P = -0.31 mg
Se tiene entonces que
-0.31 rng(Ay) = - " m v ? I 2

174 Cap. 8. TRABAJO Y ENERGíA
Dividiendo ambos miembros de esta ecuación entre (-0.31 mg) obtenemos Ay
Ay = V i 2 X 0.31 g (8.81)
y sustituyendo valores numéricos encontramos
Ay = (2.8 mls)’ 2 X 0.31 X 9.8 mis2 = 1.29 m
ÉSta es la distancia que desciende el elevador antes de detenerse.
Usando las ecs. (8.77) y (8.78), el teorema trabajo- energía cinética dado por la ec. (8.76) se puede escri- b i r como
Wp + Wf AK (8.82)
Pero dado que el peso P es una fuerza conservativa, se tiene que
W p = -AU
siendo U la energía potencial gravitacional, dada por la ec. (8.51). La ec. (8.82) queda entonces como
-AU + W f = AK
que equivale a
Wf = AK + AU = A(K + U) = A€ (8.83)
Si finalmente recordamos que el trabajo hecho por la fuerza de fricción, Wf, es una cantidad negativa (véa- se ec. (8.78)) que podemos escribir como
Wf = - IWf !
la ec. (8.83) queda como
A€ = - I WfI (8.84)
Esta ecuación nos dice que la energía mecánica total del elevador cambia; de hecho, disminuye. La energía mecánica total del elevador no se conserva. Lo que ocurre es que el sistema Tierra-Elevador, en este caso no es un sistema aislado ya que experimenta una fuer- za ajena a éI, a saber, la fuerza de fricción. Por tanto, su energía mecánica cambia, y cambia justamente en la cantidad dada por el trabajo realizado por la fuerza de fricción. En nuestro caso, la energía mecánica dis- minuye a causa de la fricción. E l propósito de aplicar la fricción es justamente disminuir la energía del ele- vador.
En general, cuando un sistema no es cerrado, su energía mecánica no se conserva, sino que cambia
justamente en la cantidad dada por el trabajo realiza- do por las fuerzas ajenas al sistema. E l algunas ocasio- nes la energía mecánica del sistema puede aumentar. En este caso, se dice que las fuerzas ajenas a éI hacen trabajo sobre el sistema. En otras ocasiones, como en el ejemplo del elevador, la energía mecánica disminu- ye. Se dice entonces que el sistema hace trabajo sobre su alrededor.
Ejercicio 8.22. Considérese la palanca mostrada en la figura 8.42. En un extremo se aplica una fuerza F para subir el cuerpo de peso P que se encuentra en el otro extremo. Usando el principio de conservación de la energía mecánica, obtenga la magnitud de la fuer- za F para subir el cuerpo a velocidad constante. Desprecie la fricción que pudiese haber en el apoyo A.
Figura 8.42
En este caso se tiene que el trabajo WF realizado por la fuerza F al recorrer la distancia (Ay)l se transfor- ma en un cambio de la energía mecánica A€ del sistema Tierra-cuerpo al moverse la distancia (Ay)2.
E l trabajo WF es
Por otro lado, dado que el proceso ocurre a veloci- dad constante, no hay cambio en la energía cinética del cuerpo. En consecuencia, el cambio en la energía mecánica es solamente el cambio en la energía poten- cial del cuerpo al recorrer la distancia (Ay)’
Igualando (8.85) con (8.86) nos da
Despejando de esta ecuación F
(8.87)

PROBLEMAS 175
En la f igura 8.42 vemos que los tr iángulos AMN y AVS son semejantes. Por tanto, por geometría sabe- mos que
que sutituyendo en la ec. (8.87) nos da
F = P- L 2
L l (8.88)
ÉSta es la fuerza que hay que aplicar para elevar el cuerpo de peso P. Si se quiere poder levantar el cuer- po con una fuerza menor a su peso, o sea,
F < P
entonces se debe tener que
E s decir,
La fuerza F se debe aplicar entonces a una distancia L , del apoyo A mayor que la distancia L 2 del cuerpo al apoyo.
Se define la ventaja mecánica de la palanca como el cociente del peso del cuerpo por levantar, P, entre la fuerza F necesaria para lograrlo. De la ec. (8.88) re- sulta que la ventaja mecánica de la palanca es
(8.89)
Este número es mayor que 1 , Mientras más grande sea el cociente (Ll/L2) , más ventajosa será la palanca y me- nor fuerza tendremos que aplicar para subir el cuerpo.
Hay que darse cuenta de que a pesar de que se apli- ca una fuerza F menor que el peso P, se tiene que re- correr una distancia (Ay), mayor que la que recorre el peso (Ay)2. En este proceso no nos ahorramos trabajo.
Una máquina es un dispositivo que nos permite mo- ver cuerpos utilizando fuerzas de magnitudes meno- res a los pesos que hay que mover. Mientras mayor sea la ventaja mecánica de una máquina, menor será la fuerza que se tenga que aplicar. Sin embargo, en una máquina uno no se ahorra trabajo,
PROBLEMAS
8.1. Demuestre la ec. (8.6) para el caso en que la fuer- za constante F forme un ángulo 8 con la dirección del desplazamiento.
8.2. Demuestre la ec. (8.13). 8.3. Desde una altura de 28 m se hace descender, con ayuda de una cuerda, una cubeta que pesa 32 kg, con una aceleración de 1.3 m/s2. 2Qué trabajo se realiza? 8.4. Un levantador de pesas levanta una masa de 120 k g hasta una altura de 1.90 m. iQué trabajo realiza? 8.5. Una persona empuja un cuerpo que pesa 25 kg, a velocidad constante, una distancia de 4.6 m. E l cuer- p o se mueve horizontalmente y l a persona aplica la fuerza formando un ángulo de 38O con la horizontal. E l coeficiente de fricción dinámico entre el cuerpo y la supgrficie horizontal es 0.14. 2Qué trabajo reali- za la persona? 8.6. Para jalar un carrito que pesa 22 kg a velocidad constante se requiere aplicar una fuerza T de magnitud 165 N formando un ángulo de 25O con la horizontal.
a) Calcule el trabajo que realiza T al moverse el carrito una distancia de 15 m horizontalmente.
b) Obtenga el valor de la fuerza de fricción entre el carrito y el piso.
c) Obtenga el coeficiente de fricción entre el carri- t o y el piso.
d ) Calcule el trabajo realizado por la fuerza de fric- ción al desplazarse horizontalmente el carrito 15 m.
8.7. Demuestre que (J/kg) = (m2/s2). 8.8. Obtenga las dimensiones y unidades en el SI de la energía cinética K dada en la ec. (8.24). 8.9. Un cuerpo que pesa 15 kg se empuja hacia arriba, con velocidad constante, a lo largo de un plano incli- nado, que forma un ángulo de 2 7 O con la horizontal. La fuerza aplicada es paralela al plano. La distancia recorrida es de 14.7 m. E l coeficiente de fricción entre el cuerpo y el plano es 0.18.
a) Obtenga los trabajos realizados por la fuerza aplicada, la de fricción y por el peso del cuerpo.
bl iCuál es el valor de la suma de los trabajos he- chos por las tres fuerzas? iQué significa su resul- tado?
8.10. Un cuerpo de masa 62 k g se mueve a lo largo de una superficie horizontal con velocidad inicial de 32 km/h. E l coeficiente de fricción dinámico entre el cuerpo y la superficie es 0.19. Usando argumentos energéticos responda a las siguientes cuestiones.
a) iQué distancia recorre el cuerpo hasta dete-
b) >Qué velocidad tiene el cuerpo después de ha- nerse?
ber recorrido una distancia de 15 m ?
8.11. Un caballo jala a una carreta que pesa 450 kg aplicando una fuerza horizontal de magnitud 165 kg. E l coeficiente de fricción dinámico entre la carreta y el suelo es 0.27. La carreta se mueve 158 m.
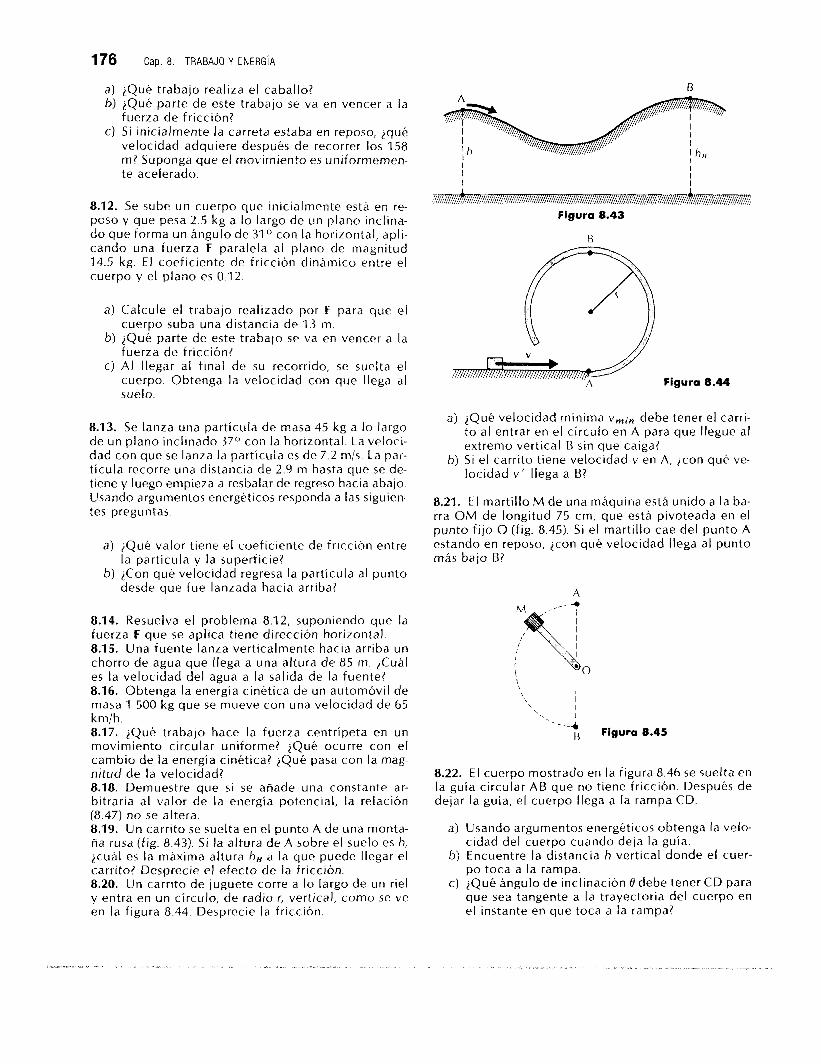
176 Cap. 8. TRABAJO Y ENERGiA
a) iQué trabajo realiza el caballo? b) 2Qué parte de este trabajo se va en vencer a la
fuerza de fricción? c) Si inicialmente la carreta estaba en reposo, iqué
velocidad adquiere después de recorrer los 158 m ? Suponga que el movimiento es uniformemen- te acelerado.
8.12. Se sube un cuerpo que inicialmente est& en re- poso y que pesa 2.5 kg a lo largo de un plano inclina- do que forma un ángulo de 31 o con la horizontal, apli- cando una fuerza F paralela al plano de magnitud 14.5 kg. E l coeficiente de fricción dinámico entre el cuerpo y el plano es 0.12.
a) Calcule el trabajo realizado por F para que el cuerpo suba una distancia de 13 m.
b) iQué parte de este trabajo se va en vencer a la fuerza de fricción?
c) A I l legar al final de su recorrido, se suelta el cuerpo. Obtenga la velocidad con que llega al suelo.
8.13. Se lanza una particula de masa 45 kg a lo largo de un plano inclinado 37” con la horizontal. La veloci- dad con que se lanza la partícula es de 7.2 mis. La par- tícula recorre una distancia de 2.9 m hasta que se de- tiene y luego empieza a resbalar de regreso hacia abajo. Usando argumentos energéticos responda a las siguien- tes preguntas.
a) 2Qué valor tiene el coeficiente de fricción entre
b) icon qué velocidad regresa la partícula al punto la partícula y la superficie!
desde que fue lanzada hacia arriba?
8.14. Resuelva el problema 8.12, suponiendo que la fuerza F que se aplica tiene dirección horizontal. 8.15. Una fuente lanza verticalmente hacia arriba un chorro de agua que llega a una altura de 85 m. iCuá1 es la velocidad del agua a la salida de la fuente? 8.16. Obtenga la energía cinética de un automóvil de masa 1 500 kg que se mueve con una velocidad de 65 km/h. 8.17. iQué trabajo hace la fuerza centrípeta en un movimiento circular uniforme? iQué ocurre con el cambio de la energía cinética? iQué pasa con la mag- nitud de la velocidad? 8.18. Demuestre que s i se atiade una constante ar- bitraria al valor de la energía potencial, la relación (8.47) n o se altera. 8.19. Un carrito se suelta en el punto A de una monta- ria rusa (fig. 8.43). S i la altura de A sobre el suelo es h, j cuá l es la máxima altura h B a la que puede llegar el carrito? Desprecie el efecto de la fricción. 8.20. Un carrito de juguete corre a lo largo de un riel y entra en un círculo, de radio r, vertical, como se ve en la figura 8.44. Desprecie la fricción.
B
I I I I
I I
Figura 8.43
4 Figura 8.44
a) iQué velocidad mínima v,in debe tener el carri- to al entrar en el círculo en A para que llegue al extremo vertical B sin que caiga?
b) Si el carrito tiene velocidad v en A, i con qué ve- locidad v ’ llega a 5?
8.21. E l mart i l lo M de una máquina está unido a la ba- rra OM de longitud 75 cm, que está pivoteada en el punto f i j o O (fig. 8.45). S i el marti l lo cae del punto A estando en reposo, )con qué velocidad llega al punto más bajo B?
A
\ I \ \ I \ I \ I -. I
‘““4 b3 Figura 8.45
8.22. E l cuerpo mostrado en la figura 8.46 se suelta et7 la guía circular A 5 que no tiene fricción. Después de dejar la guía, el cuerpo llega a la rampa CD.
a) Usando argumentos energéticos obtenga la velo- cidad del cuerpo cuando deja la guía.
b) Encuentre la distancia h vertical donde el cuer- po toca a la rampa.
c) )Qué ángulo de inclinación 0 debe tener CD para que sea tangente a la trayectoria del cuerpo en el instante en que toca a la rampa?
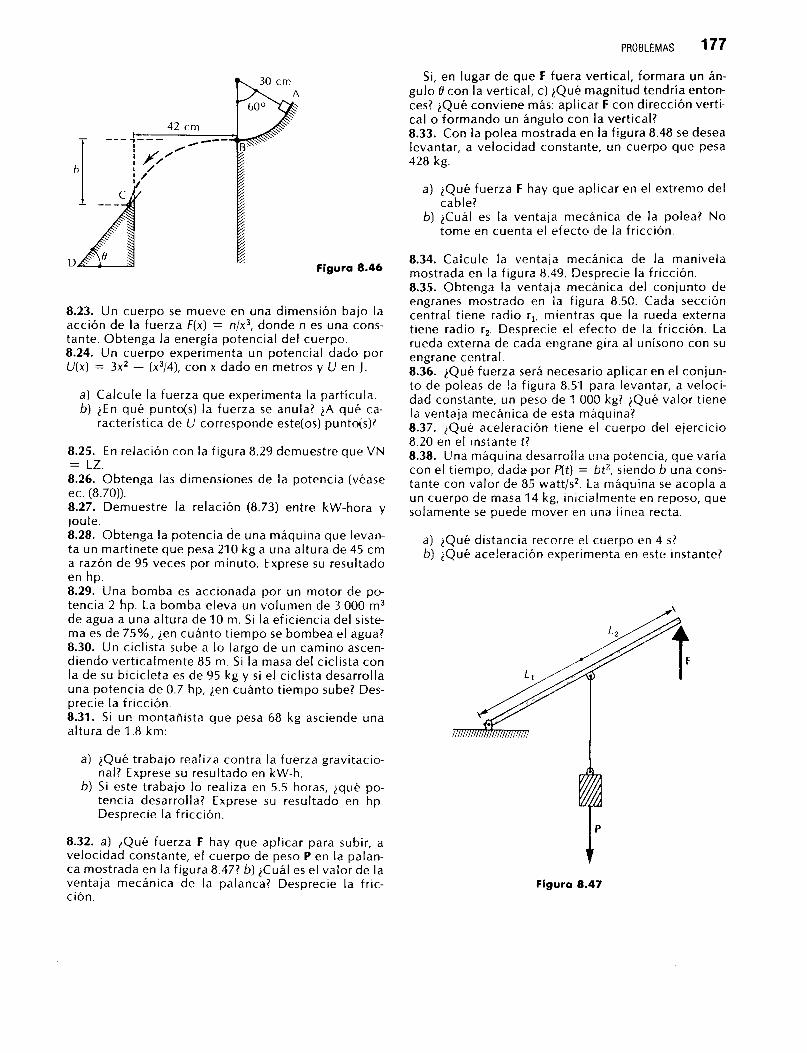
PROBLEMAS 177
Figura 8.46
8.23. Un cuerpo se mueve en una dirnensión bajo la acción de la fuerza F(x) = n/x3, donde n es una cons- tante. Obtenga la energía potencial del cuerpo. 8.24. Un cuerpo experimenta un potencial dado por U(x) = 3x2 - (x3/4), con x dado en metros y U en J.
a) Calcule la fuerza que experimenta la partícula. b) iEn qué punto(s) la fuerza se anula? >A qué ca-
racterística de U corresponde este(os) puntois)?
8.25. En relación con la figura 8.29 demuestre que VN = LZ. 8.26. Obtenga las dimensiones de la potencia (véase ec. (8.70)). 8.27. Demuestre la relación (8.73) entre kW-hora y joule. 8.28. Obtenga la potencia de una máquina que levan- ta un martinete que pesa 210 kg a una altura de 45 cm a razón de 95 veces por minuto. Exprese su resultado en hp. 8.29. Una bomba es accionada por un motor de po- tencia 2 hp. La bomba eleva un volumen de 3 000 m3 de agua a una altura de 10 m. Si la eficiencia del siste- ma es de 75%, ken cuánto t iempo se bombea el agua? 8.30. Un cicl ista sube a lo largo de un camino ascen- diendo verticalmente 85 m. S i la masa del ciclista con la de su bicicleta es de 95 kg y si el ciclista desarrolla una potencia de 0.7 hp, ien cuánto t iempo sube? Des- precie la fricción. 8.31. Si un montahista que pesa 68 kg asciende una altura de 1.8 km:
a) iQué trabajo realiza contra la fuerza gravitacio- nal? Exprese su resultado en kW-h.
b) Si este trabajo lo realiza en 5.5 horas, >qué po- tencia desarrolla? Exprese su resultado en hp. Desprecie la fricción.
8.32. a) iQué fuerza F hay que aplicar para subir, a velocidad constante, el cuerpo de peso P en la palan- ca mostrada en la figura 8.47? b) iCuá1 es el valor de la ventaja mecánica de la palanca? Desprecie la fric- ción.
Si, en lugar de que F fuera vertical, formara un án- gulo 6 con la vertical, c) jQué magnitud tendría enton- ces? 2Qué conviene más: aplicar F con dirección verti- cal o formando un ángulo con la vertical? 8.33. Con la polea mostrada en la figura 8.48 se desea levantar, a velocidad constante, un cuerpo que pesa 428 kg.
a) iQué fuerza F hay que aplicar en el extremo del
b) iCuál es la ventaja mecánica de la polea? No cable?
tome en cuenta el efecto de la fricción.
8.34. Calcule la ventaja mechnica de la manivela mostrada en la figura 8.49. Desprecie la fricción. 8.35. Obtenga la ventaja mecánica del conjunto de engranes mostrado en la figura 8.50. Cada sección central tiene radio rl, mientras que la rueda externa tiene radio rz. Desprecie el efecto de la fricción. La rueda externa de cada engrane gira al unísono con su engrane central. 8.36. iQué fuerza será necesario aplicar en el conjun- to de poleas de la figura 8.51 para levantar, a veloci- dad constante, un peso de 1 O00 kg? >Qué valor tiene la ventaja mecánica de esta máquina? 8.37. 2Qué aceleración tiene el cuerpo del ejercicio 8.20 en el Instante t? 8.38. Una máquina desarrolla una potencia, que varía con el tiempo, dada por P(t) = bt?, siendo b una cons- tante con valor de 85 watt/s2. La máquina se acopla a un cuerpo de masa 14 kg, inicialmente en reposo, que solamente se puede mover en una línea recta
a) iQu6 distancia recorre el cuerpo en 4 S ? b) ;Qué aceleración experimenta en este instante?
Figura 8.47
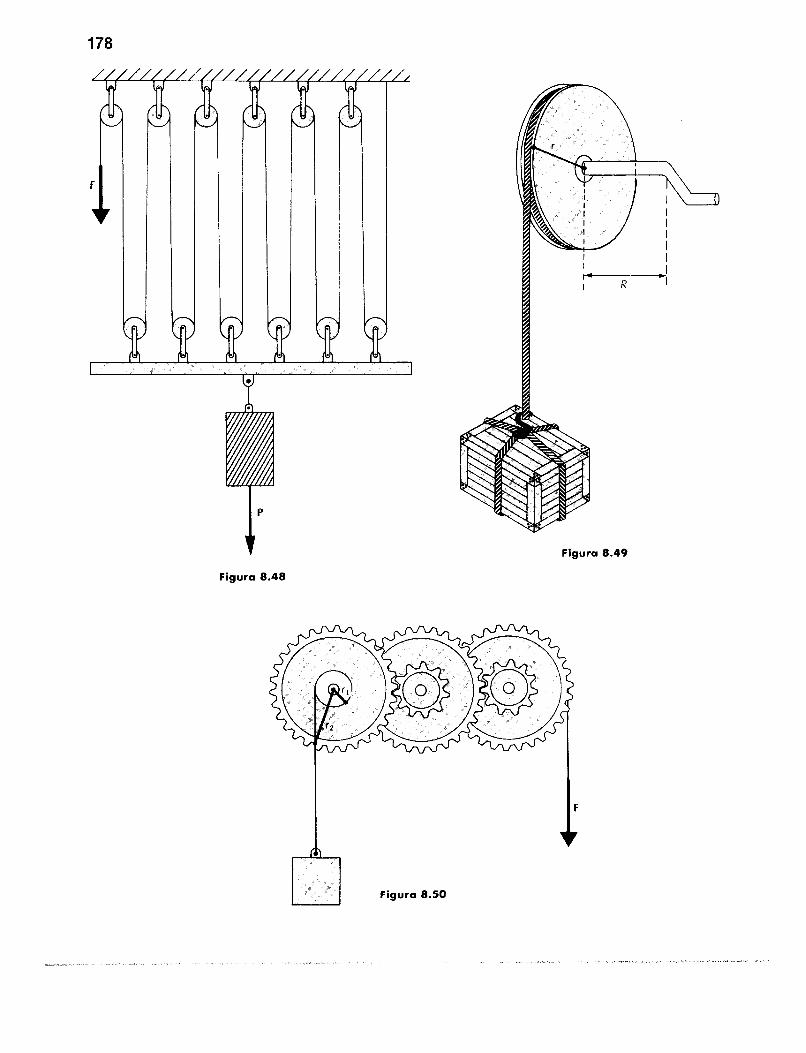
178
Figura 8.48
Figura 8.49
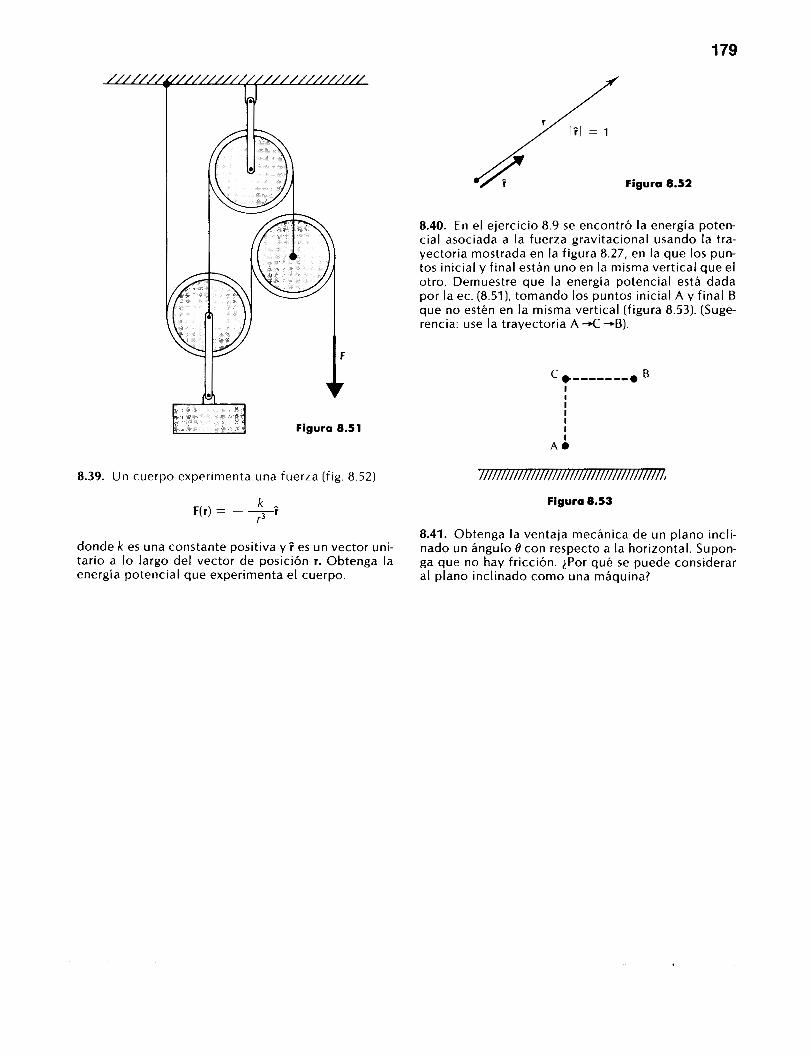
179
P I ////////////////////
1
F
r
8.39. Un cuerpo experimenta una fuerza (fig. 8.52)
F(r) = - k? r3
donde k es una constante positiva y r es un vector uni- tario a lo largo del vector de posición r. Obtenga la energía potencial que experimenta el cuerpo.
8.40. En el ejercicio 8.9 se encontró la energía poten- cial asociada a la fuerza gravitacional usando la tra- yectoria mostrada en la figura 8.27, en la que los pun- tos inicial y final están uno en la misma vertical que el otro. Demuestre que la energía potencial está dada por la ec. (8.51), tomando los puntos inicial A y final B que no estén en la misma vertical (figura 8.53). (Suge- rencia: use la trayectoria A -C +B).
I I I I I
A 0 I
Figura 8.53
8.41. Obtenga la ventaja mecánica de un plano incli- nado un ángulo 8 con respecto a la horizontal. Supon- ga que no hay fricción. >Por qué se puede considerar al plano inclinado como una máquina?
p a r t i c u I a s . Conservación del momento l i n e a l , / C e n t r o s de m a s a
En los capítulos anteriores desarrollamos la mecá- nica de una partícula. Aunque en algunas aplica- ciones hablamos de cuerpos extendidos, por ejemplo, coches, personas, etc., en realidad, en lo que se refiere a la aplicación concreta, en esos casos iba implíci to que estábamos hablando de una sola partícula.
Siguiendo el programa trazado al principio del ca- pí tu lo 3, una vez aprendida la cinemática y la dinámi- ca de una partícula emprenderemos en este capítulo el estudio de la mecánica de varias partículas. Para ello reformularemos algunos aspectos de la dinámica de una partícula que nos serán de uti l idad.
mento lineal p de una partícula de masa m que se mueve con velocidad v como
p = mv (9.3)
Si no hay confusión llamaremos a esta cantidad simplemente momento. Se le asignan también otros nombres: cantidad de movimiento, impetu, etcétera. La ec. (9.2) queda, entonces, como
(9.4)
Antes de analizar la forma (9.4) regresemos a la de- finicibn de momento (9.3). E l momento p es el produc-
9.1. M O M E N T O LINEAL DE UNA PARTíCULA to de un escalar positivo (la masa m) por un vector (la velocidad v). Por tanto (véase capítulo 2), las carac-
Consideremos la expresión (6.4) para la segunda ley terísticas del momento son: de Newton, aplicable a una partícula
a ) Su magnitud es F = ma
donde F es la fuerza que se aplica a una partícula de masa m, y a es la aceleración que experimenta. Re- b ) Su dirección es la del vector v. escribiremos esta ecuación de otra forma que será de c) Su sentido es el del vector v (véase fig. 9.1). interés. Usando la ec. (5.11) para la aceleración se tiene que Las dimensiones del momento son
/ P I = m l v l (9.5)
F = m - dv dt
Aquí v es la velocidad de la partícula. Debido a que la masa m de la partícula es una cantidad constante que no depende del tiempo, usando la ec. (3.21) podemos escribir el lado derecho de (9.1) como
F = ___ dimv) d t (9.2)
Este resultado nos sugiere definir la cantidad mv aso- ciada al movimiento de la partícula. Se define el mo- Figura 9. l
180
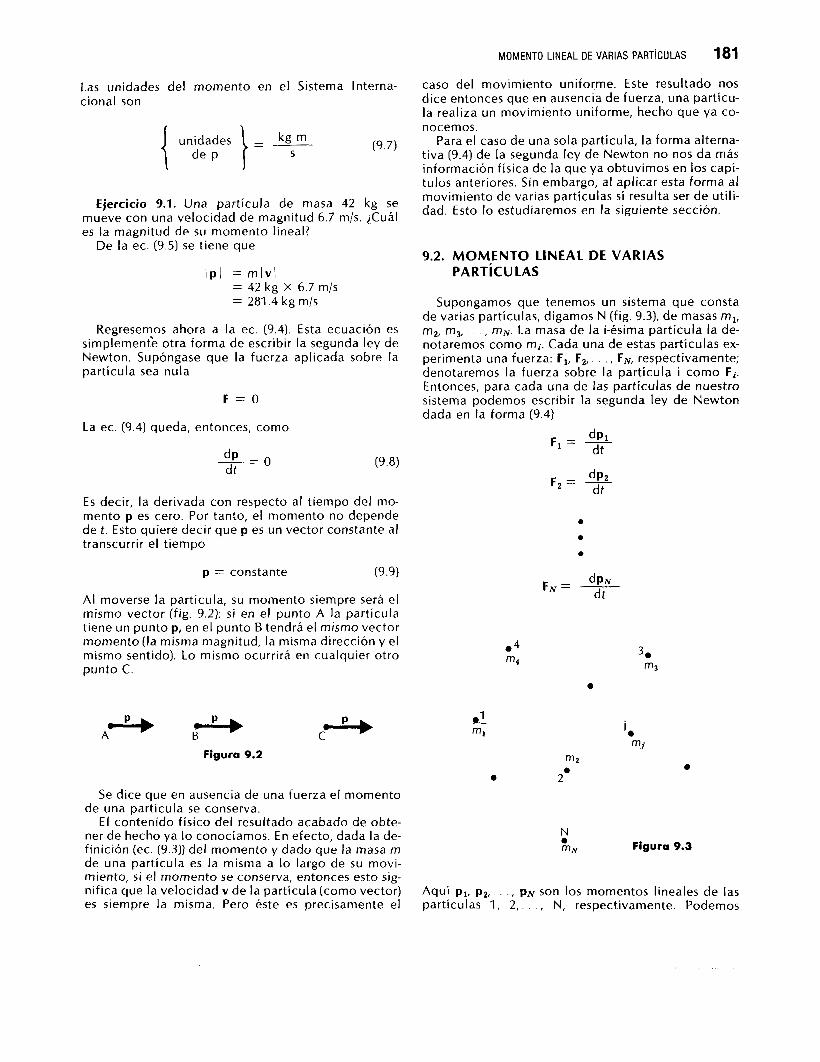
MOMENTO LINEAL DE VARIAS PART~CULAS 181
Las unidades del momento en el Sistema Interna- cional son
(9.7)
Ejercicio 9.1. Una partícula de masa 42 kg se mueve con una velocidad de magnitud 6.7 m/s. $uá1 es la magnitud de su momento lineal?
De la ec. (9.5) se tiene que
/ P I = m l v l = 42 kg X 6.7 mis = 281.4 kg m/s
Regresemos ahora a la ec. (9.4). Esta ecuación es simplementk otra forma de escribir la segunda ley de Newton. Supóngase que la fuerza aplicada sobre la partícula sea nula
F = O
La ec. (9.4) queda, entonces, como
- = o dP d t
E s decir, la derivada con respecto al tiempo del mo- mento p es cero. Por tanto, el momento no depende de t . Esto quiere decir que p es un vector constante al transcurrir el tiempo
p = constante (9.9)
AI moverse la partícula, su momento siempre será el mismo vector (fig. 9.2): s i en el punto A la partícula tiene un punto p, en el punto B tendrá el mismo vector momento (la misma magnitud, la misma dirección y el mismo sentido). Lo mismo ocurrirá en cualquier otro punto C.
Figura 9.2
C + Se dice que en ausencia de una fuerza el momento
de una partícula se conserva. E l contenido físico del resultado acabado de obte-
ner de hecho ya lo conocíamos. En efecto, dada la de- finición (ec. (9.3)) del momento y dado que la masa m de una partícula es la misma a lo largo de su movi- miento, s i el momento se conserva, entonces esto sig- nifica que la velocidad v de la partícula (como vector) es siempre la misma. Pero éste es precisamente el
caso del movimiento uniforme. Este resultado nos dice entonces que en ausencia de fuerza, una partícu- la realiza un movimiento uniforme, hecho que ya co- nocemos.
Para el caso de una sola partícula, la forma alterna- tiva (9.4) de la segunda ley de Newton no nos da más información física de la que ya obtuvimos en los capí- tulos anteriores. Sin embargo, al aplicar esta forma al movimiento de varias partículas sí resulta ser de utili- dad. Esto lo estudiaremos en la siguiente sección.
9.2. MOMENTO LINEAL DE VARIAS PARTíCULAS
Supongamos que tenemos un sistema que consta de varias partículas, digamos N (fig. 9.3), de masas m,, m2, m3, . . , mN. La masa de la i-ésima partícula la de- notaremos como mi. Cada una de estas partículas ex- perimenta una fuerza: F,, F2,. . , , FN, respectivamente; denotaremos la fuerza sobre la partícula i como Fi. Entonces, para cada una de las partículas de nuestro sistema podemos escribir la segunda ley de Newton dada en la forma (9.4)
e4 m4
e
3 , m3
Je mi
e
Figura 9.3
Aquí pl, p2, . . , pN son los momentos lineales de las partículas 1, 2,. . . , N, respectivamente. Podemos
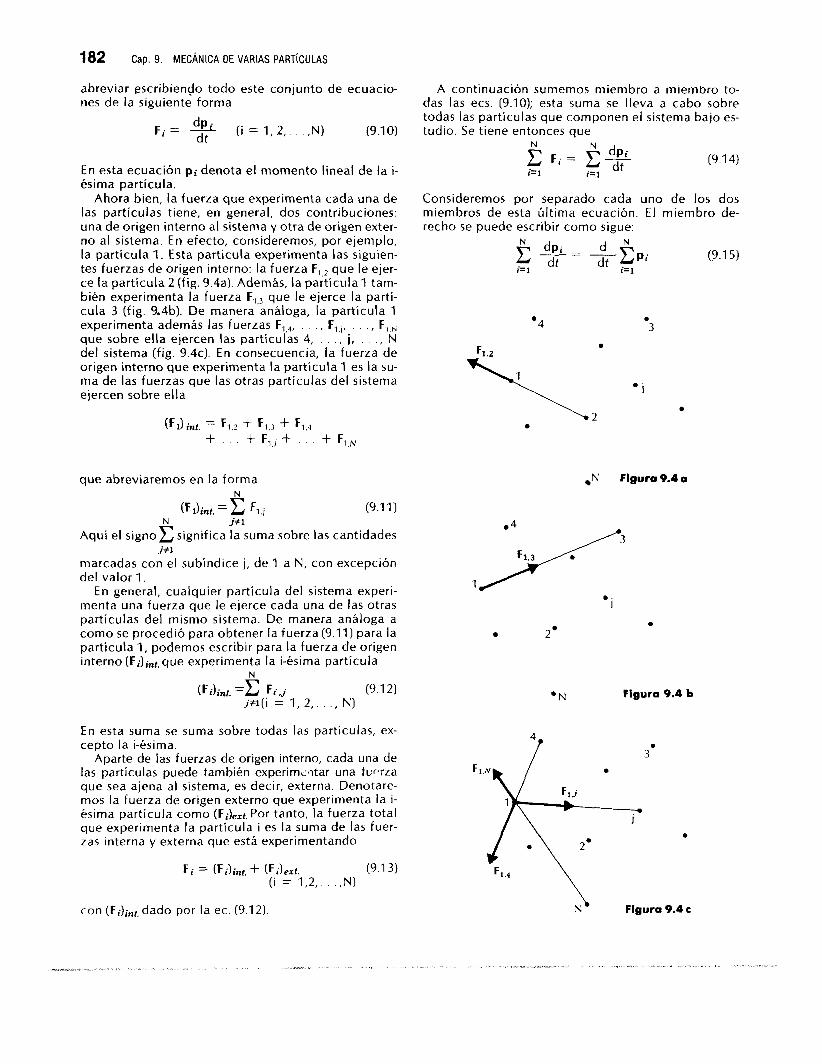
182 Cap. 9. MECANICA DE VARIAS PARTíCULAS
abreviar escribiendo todo este conjunto de ecuacio- nes de la siguiente forma
(i = 1,2, (9.1 O)
En esta ecuación pi denota el momento lineal de la i- ésima partícula.
Ahora bien, la fuerza que experimenta cada una de las partículas tiene, en general, dos contribuciones: una de origen interno al sistema y otra de origen exter- no al sistema. En efecto, consideremos, por ejemplo, la partícula 1. Esta partícula experimenta las siguien- tes fuerzas de origen interno: la fuerza F,,* que le ejer- ce la partícula 2 (fig. 9.4a). Además, la partícula 1 tam- bién experimenta la fuerza F,,3 que le ejerce la partí- cula 3 (fig. 9.4b). De manera análoga, la partícula 1 experimenta además las fuerzas F,,,, . . , F,, , , . . ., F,,N que sobre ella ejercen las partículas 4, . . . , j, . . , N del sistema (fig. 9.4~). En consecuencia, la fuerza de origen interno que experimenta la partícula 1 es la su- ma de las fuerzas que las otras partículas del sistema ejercen sobre ella
que abreviaremos en la forma N
(Fllint. = c Fl ; (9.1 1)
A continuación sumemos miembro a mlembro to- das las ecs. (9.10); esta suma se lleva a cabo sobre todas las partículas que componen el sistema bajo es- tudio. Se tiene entonces que
(9.1 4)
Consideremos por separado cada uno de los dos miembros de esta última ecuación. E l miembro de- recho se puede escribir como sigue:
m 3
N Figura 9.4 a
N j# 1
Aquí el signo significa la suma sobre las cantidades
marcadas con el subíndice j, de 1 a N, con excepción del valor 1.
En general, cualquier partícula del sistema experi- menta una fuerza que le eierce cada una de las otras
j # l
1 m .
I
partículas del mismo siste’ma. De manera análoga a como se procedió para obtener la fuerza (9.11) para la partícula 1, podemos escribir para la fuerza de origen interno (F;)int.que experimenta la i-ésima partícula
(FiIint. =C ~ i , j (9.1 2) N
j+ l ( i = 1, 2 , . . . , N)
En esta suma se suma sobre todas las partículas, ex- cepto la i-ésima.
Aparte de las fuerzas de origen interno, cada una de las partículas puede también experimc,ltar una f w r z a que sea ajena al sistema, es decir, externa. Denotare- mos la fuerza de origen externo que experimenta la i- @sima partícula como (Fi)ext. Por tanto, la fuerza total que experimenta la partícula i es la suma de las fuer- zas interna y externa que está experimentando
m m
*N Figura 9.4 b
m 3
O
* j
con (FL)~,,, , dado por la ec. (9.1 2). N’ Figura 9.4 c
(9.1 5)

Recordamos que la suma de derivadas es igual a la derivada de la suma (véase ec. (3.20)).
Definimos ahora el momento lineal total P del sistema como la suma de todos los momentos de cada una de las partículas que lo componen
De esta forma, queda como
N
P = C P i (9.1 6)
el miembro derecho de la ec. (9.14) i= 1
(9.1 7 )
Ahora consideremos el miembro izquierdo de la ec. (9.14). Sustituyendo la ec. (9.13) obtenemos
N N
Fi = C(Fi)int. +E (FAext. (9.1 8) i= 1 i= 1
El segundo sumando del miembro derecho de esta ex- presión es la suma de las fuerzas externas que se apli- can a cada una de las partículas; por tanto, es la fuer- za externa total (Fl)ext. que se aplica al sistema
N
E (FiIext. = ext. t. (9.1 9) i= 1
Ahora consideraremos la suma de todas las fuerzas in- ternas, dada por el primer sumando del miembro de- recho de la ec. (9.18). Si sustituimos en este sumando las fuerzas de origen interno que experimenta cada partícula (ec. (9.12)), se tiene una suma de la siguiente forma
N
(FJint. = F I , ~ + ~ 7 , 3 + F , , + . .
i= 1 + F2,l + F,3 + F2.4 + . ' '
+ '3,l + '3,2 + '3,4 + ' ' ' + Aquí se están sumando todas las fuerzas internas del sistema. Podemos efectuar ahora la suma cambiando el orden de los sumandos, agrupándolos por parejas
AI inspeccionar estos términos nos damos cuenta de que la suma consiste en la suma de las fuerzas que cada pareja de partículas ejerce una sobre la otra. Por ejemplo, la suma de las fuerzas que la pareja (1,2) ejerce entre sí es (véase fig. 9.5)
Fl,2 + F , ,
Pero por la tercera ley de Newton sabemos que s i la partícula 2 ejerce una fuerza F,,2 sobre la partícula 1, entonces la partícula 1 reacciona y ejerce sobre la
F1.2
04 O 3
O N
Figura 9.5
partícula 2 una fuerza F2,,. Según esta ley, la relación entre estas dos fuerzas es
por lo que la suma
Fl,* + F2,l = 0
se anula. De la misma manera, la suma de las fuerzas que cada pareja ejerce entre sí se anula. En conse- cuencia, cada uno de los paréntesis del lado derecho de la ec. (9.20) se anula y, por tanto, todo el lado de- recho es cero. E s decir,
N
(FJint. = 0 (9.21) i= 1
Por tanto, la fuerza interna total de un sistema de par- tículas es cero. Esto es una consecuencia de la tercera ley de Newton. La ec. (9.18) queda entonces como
N
(9.22) i= 1
Aquí se usó la ec. (9.19). Este resultado nos indica que la fuerza total ejercida sobre un sistema de partículas es igual a la fuerza externa total que se aplica al siste- ma. Las fuerzas internas no contribuyen a la fuerza to- tal. Sustituyendo ahora las ecs. (9.1 7 ) y (9.22) en la ec. (9.14) obtenemos
(9.23)
La ec. (9.23) nos indica que el momento total P de un sistema solamente puede cambiar debido a la ac- ción de una fuerza externa. Las fuerzas internas de un sistema NO modifican su momento total.
Ahora reescribiremos la ec. (9.23) de otra forma. E l momento p i de la partícula i es (véase ec. (9.3))
pi = mivi
- - mi - dri dt (9.24)
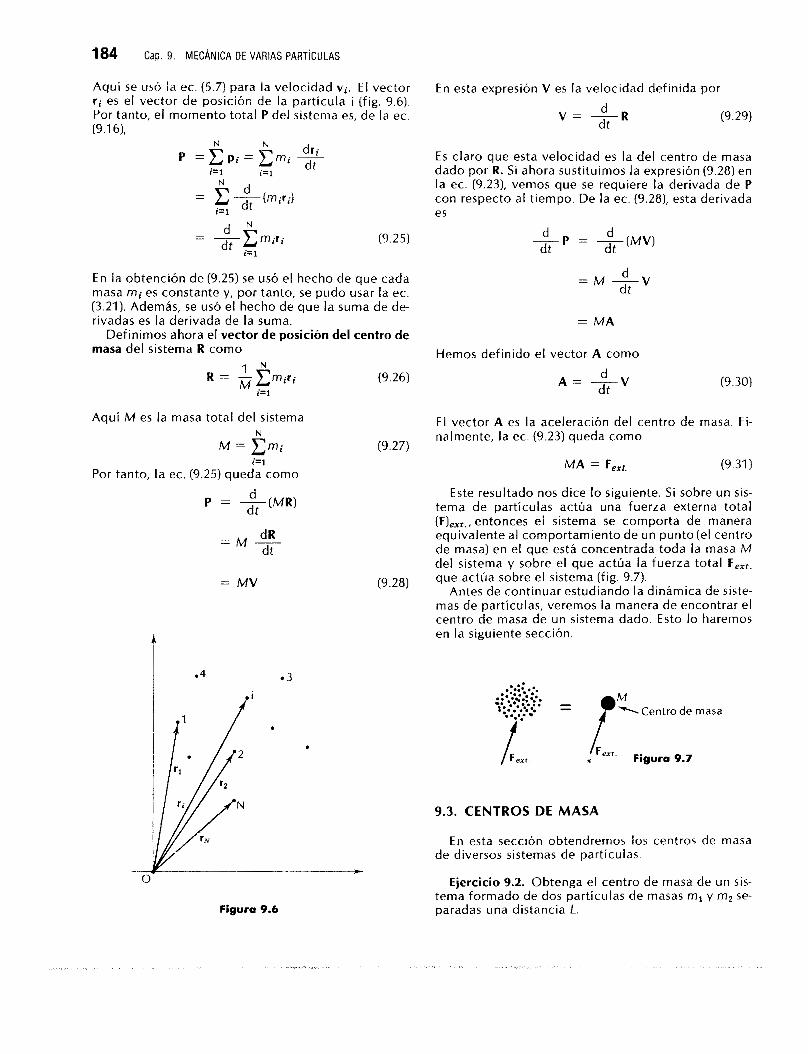
184 Cap. 9. MECANICA DE VARIAS PART/CUI.AS
Aquí se usó la ec. (5.7) para la velocidad vi. E l vector r i es el vector de posición de la partícula i (fig. 9.6). Por tanto, el momento total P del sistema es, de la ec. (9.1 61,
(9.25)
En la obtención de (9.25) se usó el hecho de que cada masa mi es constante y, por tanto, se pudo usar la ec. (3.21). Además, se usó el hecho de que la suma de de- rivadas es la derivada de la suma.
Definimos ahora el vector de posición del centro de masa del sistema R como
Aquí M es la masa total del sistema N
M = C m i
Por tanto, la ec. (9.25) queda como ¿= 1
d d t
P -(MR)
dR = M - dt
= M V
4
I '4 .3
.
Figura 9.6
, .
(9.26)
(9.27)
(9.28)
En esta expresión V es la velocidad definida por
v = - d R dt
(9.29)
E s claro que esta velocidad es la del centro de masa dado por R. Si ahora sustituimos la expresión (9.28) en la ec. (9.231, vemos que se requiere la derivada de P con respecto al tiempo. De la ec. (9.28), esta derivada es
d d dt dt
- P = -(MV)
= M - dt d V
= MA
Hemos definido el vector A como
(9.30)
E l vector A es la aceleración del centro de masa. Fi- nalmente, la ec. (9.23) queda como
MA = F&. (9.31)
Este resultado nos dice lo siguiente. Si sobre un sis- tema de partículas actúa una fuerza externa total (F)ext., entonces el sistema se comporta de manera equivalente al comportamiento de un punto (el centro de masa) en el que está concentrada toda la masa M del sistema y sobre el que actúa la fuerza total Fe,,. que actúa sobre el sistema (fig. 9.7).
Antes de continuar estudiando la dinámica de siste- mas de partículas, veremos la manera de encontrar el centro de masa de un sistema dado. Esto lo haremos en la siguiente sección.
.:**..'..:.:. ++;. f
....... - r:. . .S m. - h Centro de masa . .*.: /Fe,*. I F e x r ' Figura 9.7
9.3. CENTROS DE MASA
En esta sección obtendremos los centros de masa de diversos sistemas de partículas.
Ejercicio 9.2. Obtenga el centro de masa de un s is- tema formado de dos partículas de masas m , y m2 se- paradas una distancia L.

CENTROS DE MASA 185
Tomemos un sistema de coordenadas con el eje X a lo largo de la línea que une a las partículas (fig. 9.8), con el origen en una de las partículas, digamos la de masa m,. Llamaremos a esta partícula 1 y a la otra, 2. En este sistema de coordenadas los vectores de posi- ción de estas partículas son
partícula 1: r l = (x,, y,, z,) = (O, O, O ) partícula 2: r2 = (x,, y,, z,) = (L , O, O)
y4
Por tanto, de las ecs. (9.32) y (9.33) concluimos que la posición R del centro de masa de las dos partículas es- tá dada Dor
(9.34)
Este resultado nos indica varias cosas. En primer Iu- gar, e l vector R tiene dirección a lo largo del eje X, de- bido a que sus coordenadas Y y Z se anulan. E s decir, el centro de masa de dos partículas está en la línea que une a las dos partículas.
En segundo lugar, dado que la masa de una partícu- la (m,) es menor que la masa de todo el sistema (M),
mdM < 1
de la ec. (9.32) podemos escribir que
X < L
En consecuencia, la posición del centro de masa está 11 2 situada entre las dos partículas, como se muestra en
O + - U
X la figura 9.9. 1 V
Figura 9.8
Ahora usaremos la definición de R, el vector de posi- ción del centro de masa, dada por la ec. (9.26), con el número de particulas del sistema N = 2. Sean las componentes de R = (X,Y,Z). Tomemos la componen- te x de la ec. (9.26)
1 , X = -Cmixi
M i=,
X = -(mix, + m,x,) 1 M
Aquí M es la masa total del sistema
M = m, + m2
Sustituyendo
x 1 = 0 y x q = L
se tiene que
X = -(m, X O + m2L) 1 M
(9.32)
Se puede demostrar que, en este caso (véase proble- ma 9.3),
Y = O z = o (9.33)
Figura 9.9
La posición exacta depende, según vemos en la ec. (9.321, del cociente (mdM). Se pueden presentar varias posibilidades:
i) m, = m, = m; es decir, las partículas tienen masas iguales.
En este caso se tiene que
M = m, + m, = 2m
por lo que de la ec. (9.32)
x = - L = - L = -L (9.35) m 1
M 2m 2
En el caso de masas iguales, el centro de masa se en- cuentra a la mitad de la distancia entre ellas (fig. 9.10). i i) Sea m, > m,; es decir, la partícula que está en el origen (1) es más masiva que la otra (2). E l cociente que multiplica a L en la ec. (9.32) lo podemos escribir como
m2 - m2 "
M m1 + m2
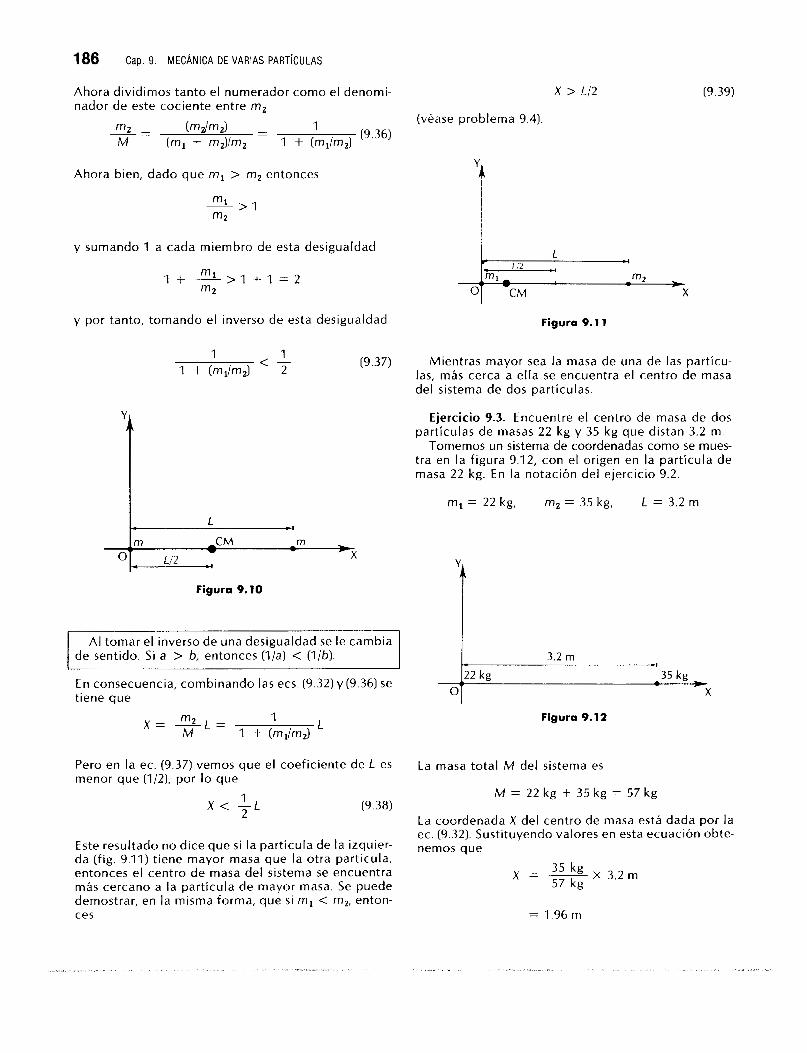
186 Cap. 9. MECANICA DE VARIAS PART~CULAS
Ahora dividimos tanto el numerador como el denomi- nador de este cociente entre m2
Ahora bien, dado que m, > m2 entonces
y sumando 1 a cada miembro de esta desigualdad
I+ - > 1 + 1 = 2 m2
y por tanto, tomando el inverso de esta desigualdad
1 1 1 + (ml/m21 2
< - (9.37)
L Figura 9.10
AI tomar el inverso de una desigualdad se le cambia de sentido. Si a > b, entonces ( l /a) < (l/b).
En consecuencia, combinando las ecs. (9.32) y (9.36) se tiene que
Pero en la ec. (9.37) vemos que el coeficiente de L es menor que (1/2), por lo que
x < "L I 2
(9.38)
Este resultado no dice que si la partícula de la izquier- da (fig. 9.11) tiene mayor masa que la otra partícula, entonces el centro de masa del sistema se encuentra más cercano a la partícula de mayor masa. Se puede demostrar, en la misma forma, que s i m, < m2, enton- ces
x > Ll2
(véase problema 9.4)
1 L U
Figura 9.1 1
(9.39)
Mientras mayor sea la masa de una de las partícu- las, más cerca a ella se encuentra el centro de masa del sistema de dos partículas.
Ejercicio 9.3. Encuentre el centro de masa de dos partículas de masas 22 kg y 35 kg que distan 3.2 m.
Tomemos un sistema de coordenadas como se mues- tra en la figura 9.12, con el origen en la partícula de masa 22 kg. En la notación del ejercicio 9.2.
m, = 22 kg, m2 = 35 kg, L = 3.2 m
35 kg /
X
Figura 9.12
La masa total M del sistema es
M = 22 kg + 35 kg = 57 kg
La coordenada X del centro de masa está dada por la ec. (9.32). Sustituyendo valores en esta ecuación obte- nemos que
x = " - 35 kg X 3.2 m 57 kg
= 1.96 m
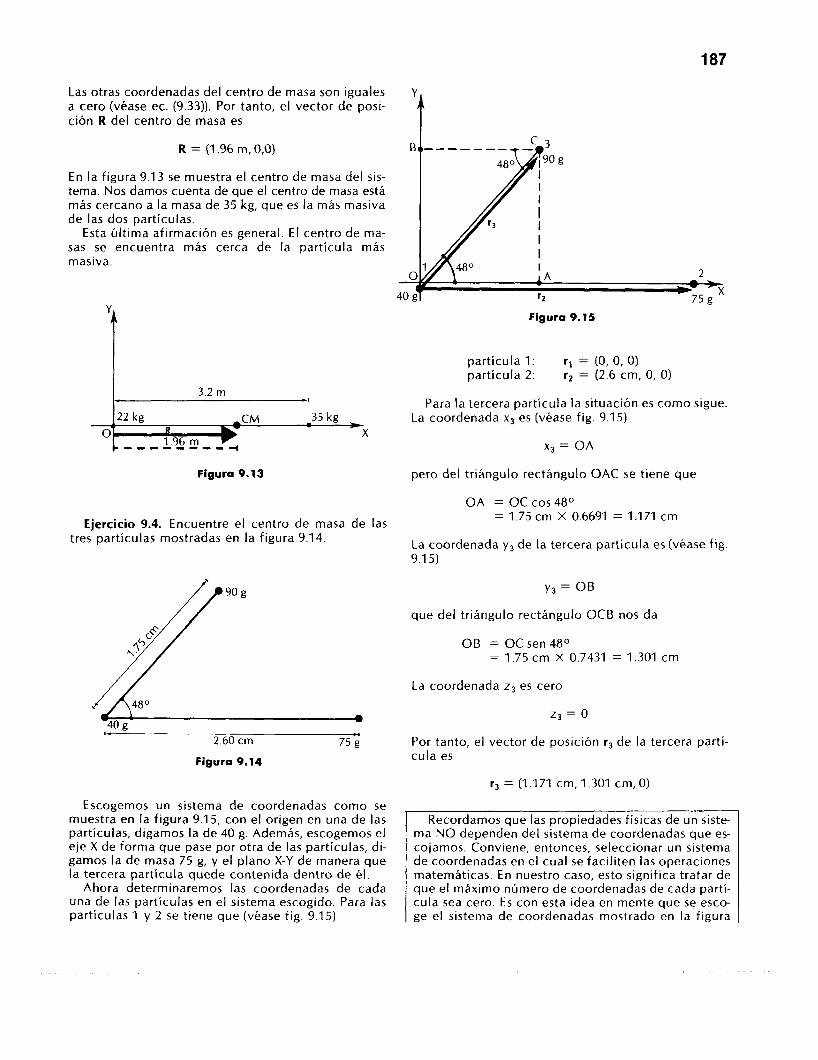
187
Las otras coordenadas del centro de masa son iguales a cero (véase ec. (9.33)). Por tanto, el vector de posi- ción R del centro de masa es
R = (1.96 m, 0.0)
En la figura 9.13 se muestra el centro de masa del sis- tema. Nos damos cuenta de que el centro de masa está más cercano a la masa de 35 kg, que es la más masiva de las dos partículas.
Esta últ ima af irmación es general. E l centro de ma- sas se encuentra más cerca de la partícula más masiva.
Figura 9.15
partícula 1: rl = (O, O, O) partícula 2: rz = (2.6 cm, O, O )
3.2 m - I Para la tercera partícula la situación es como sigue. La coordenada x 3 es (véase fig. 9.15) -
O """"4 x3 = O A
Figura 9.13 pero del triángulo rectángulo OAC se tiene que
O A = OC cos 48O Ejercicio 9.4. Encuentre el centro de masa de las = 1.75 cm X 0.6691 = 1.171 cm
tres partículas mostradas en la figura 9.14. La coordenada y3 de la tercera partícula es (véase fig. 9.1 5)
LgO y3 = O B
que del triángulo rectángulo OCB nos da
O B = OC sen 48O = 1.75 cm X 0.7431 = 1.301 cm
La coordenada z3 es cero
e z3 = o
2.60 cm
Figura 9.14
-4
75 g Por tanto, el vector de posición r3 de la tercera partí- cula es
Escogemos un sistema de coordenadas como se muestra en la figura 9.15, con el origen en una de las partículas, digamos la de 40 g. Además, escogemos el eje X de forma que pase por otra de las partículas, di- gamos la de masa 75 g, y el plano X-Y de manera que la tercera partícula quede contenida dentro de él.
Ahora determinaremos las coordenadas de cada una de las partículas en el sistema escogido. Para las partículas 1 y 2 se tiene que (véase fig. 9.15)
r3 = (1 .I 71 cm, 1.301 cm, O)
Recordamos que las propiedades físicas de un siste- ma NO dependen del sistema de coordenadas que es- cojamos. Conviene, entonces, seleccionar un sistema de coordenadas en el cual se facil i ten las operaciones matemáticas. En nuestro caso, esto significa tratar de que el máximo número de coordenadas de cada partí- cula sea cero. E s con esta idea en mente que se esco- ge el sistema de Coordenadas mostrado en la figura
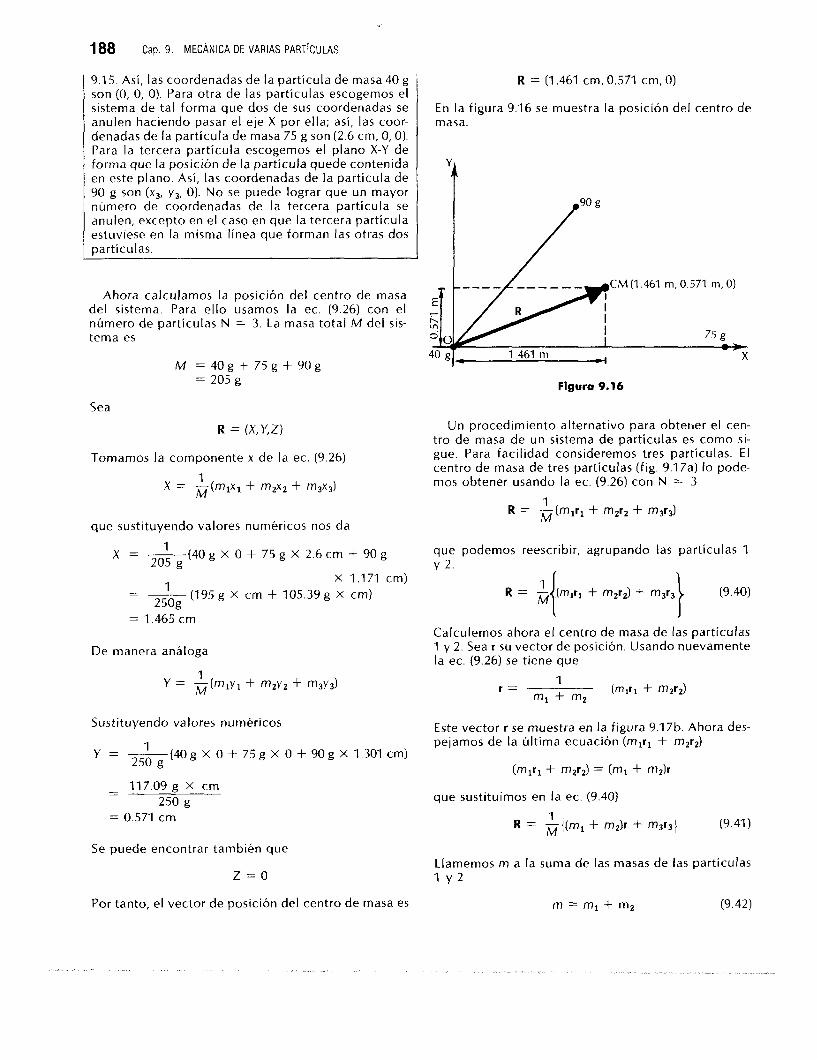
188 Cap. 9. MECANICA DE VARIAS PART~CULAS
9.1 5. Así, las coordenadas de la partícula de masa 40 g son (O, O, O). Para otra de las partículas escogemos el sistema de tal forma que dos de sus coordenadas se anulen haciendo pasar el eje X por ella; así, las coor- denadas de la partícula de masa 75 g son (2.6 cm, O, O). Para la tercera partícula escogemos el plano X-Y de forma que la posición de la partícula quede contenida en este plano. Así, las coordenadas de la partícula de 90 g son (xg, ya, O). No se puede lograr que un mayor número de coordenadas de la tercera partícula se anulen, excepto en el caso en que la tercera partícula estuviese en la misma línea que forman las otras dos partículas.
Ahora calculamos la posición del centro de masa del sistema. Para ello usamos la ec. (9.26) con el número de partículas N = 3. La masa total M del sis- tema es
M = 40g + 7 5 g + 9Og = 205 g
Sea
R = (X,Y,Z)
Tornamos la componente x de la ec. (9.26)
1 M X = -(mix, + m2x2 + m3x3)
que sustituyendo valores numéricos nos da
x = - 205 g
(40g X O + 7 5 g X 2.6cm + 9Og
X 1.171 cm) - -~
250g (195 g X cm + 105.39 g X cm)
= 1.465 cm
De manera análoga
y = "m,Yl + mzy, + m3y3) 1 M
Sustituyendo valores numéricos
y="- (40g x O + 75g x O + 9Og X 1.301 cm) 250 g
- 117.09 g X cm
= 0.571 cm
- 250 g
Se puede encontrar también que
z = o Por tanto, el vector de posición del centro de masa es
R = (1.461 cm, 0.571 cm, O)
En la figura 9.16 se muestra la posición del centro de masa.
/ q O g
Figura 9.16
Un procedimiento alternativo para obtetler el cen- tro de masa de un sistema de partículas es como si- gue. Para facilidad consideremos tres partículas. E l centro de masa de tres partículas (fig. 9.17a) lo pode- mos obtener usando la ec. (9.26) con N = 3
R = - (mlr l + m2r2 + m3r3) I
M
que podemos reescribir, agrupando las partículas 1 v 2.
(9.40)
Calculemos ahora el centro de masa de las partículas 1 y 2. Sea r su vector de posición. Usando nuevamente la ec. (9.26) se tiene que
r = 1
m1 + m2 (mlrl + m2r21
Este vector r se muestra en la figura 9.17b. Ahora des- pejamos de la última ecuación (m1rl + m2r2)
(mlr l + mzrz) = (ml + m&
que sustituimos en la ec. (9.40) 1
R = ~ ( r n , + m2)r + m3r3/ (9.41)
Llamemos m a la suma de las masas de las partículas l Y 2
m = m, + m2 (9.42)
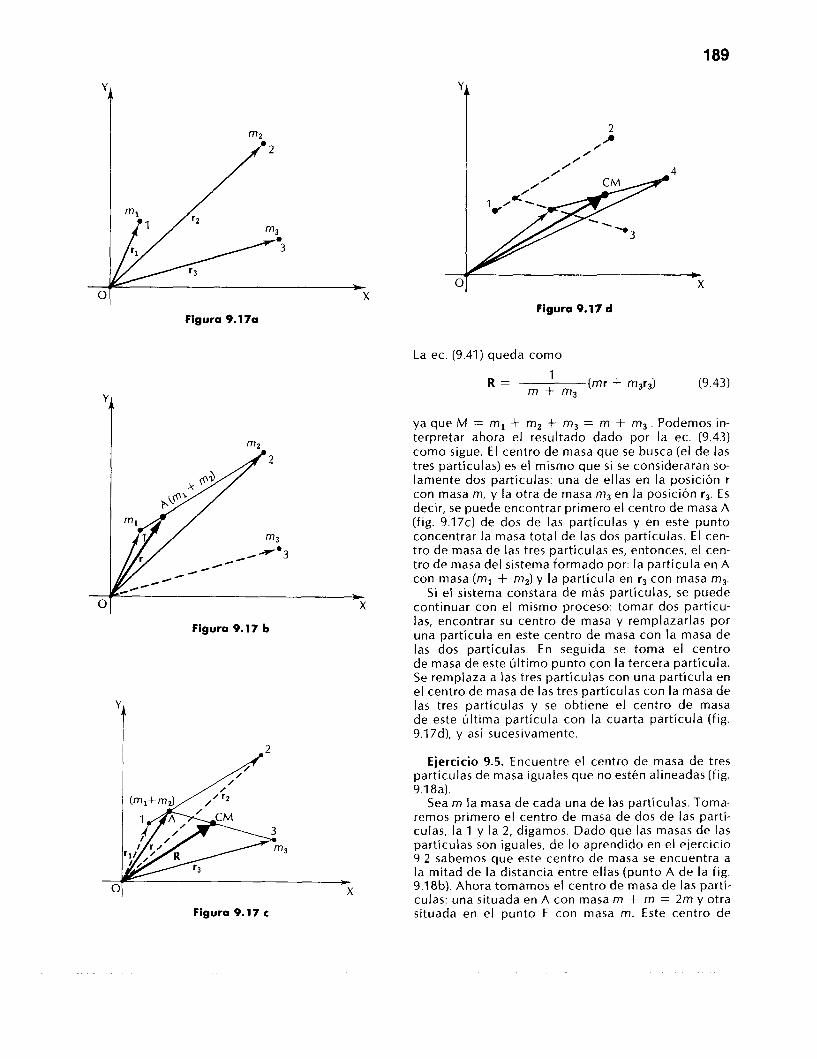
189
Figura 9.17a Figura 9.17 d
La ec. (9.41) queda como
'1.
Figura 9.17 b
yt L
O * X
Figura 9.17 c
(9.43)
ya que M = m, + m2 + m3 = m + m 3 . Podemos in- terpretar ahora el resultado dado por la ec. (9.43) como sigue. E l centro de masa que se busca (el de las tres partículas) es el mismo que s i se consideraran so- lamente dos partículas: una de ellas en la posición r con masa m, y la otra de masa m3 en la posición r3. Es decir, se puede encontrar primero el centro de masa A ( f ig . 9 .17~) de dos de las partículas y en este punto concentrar la masa total de las dos partículas. E l cen- tro de masa de las tres partículas es, entonces, el cen- t ro de masa del sistema formado por: la partícula en A con masa (m, + m,) y la partícula en r3 con masa m3.
Si el sistema constara de más partículas, se puede continuar con el mismo proceso: tomar dos partícu- las, encontrar su centro de masa y remplazarlas por una partícula en este centro de masa con la masa de las dos partículas. En seguida se toma el centro de masa de este último punto con la tercera partícula. Se remplaza a las tres partículas con una partícula en el centro de masa de las tres partículas con la masa de las tres partículas y se obtiene el centro de masa de este última partícula con la cuarta partícula (fig. 9.17d), y así sucesivamente.
Ejercicio 9.5. Encuentre el centro de masa de tres partículas de masa iguales que no estén alineadas (fig. 9.1 8a).
Sea m la masa de cada una de las partículas. Toma- remos primero el centro de masa de dos de las partí- culas, la 1 y la 2, digamos. Dado que las masas de las partículas son iguales, de lo aprendido en el ejercicio 9.2 sabemos que este centro de masa se encuentra a la mitad de la distancia entre ellas (punto A de la fig. 9.18b). Ahora tomamos el centro de masa de las partí- culas: una situada en A con masa m + m = 2m y otra situada en el punto F con masa m. Este centro de
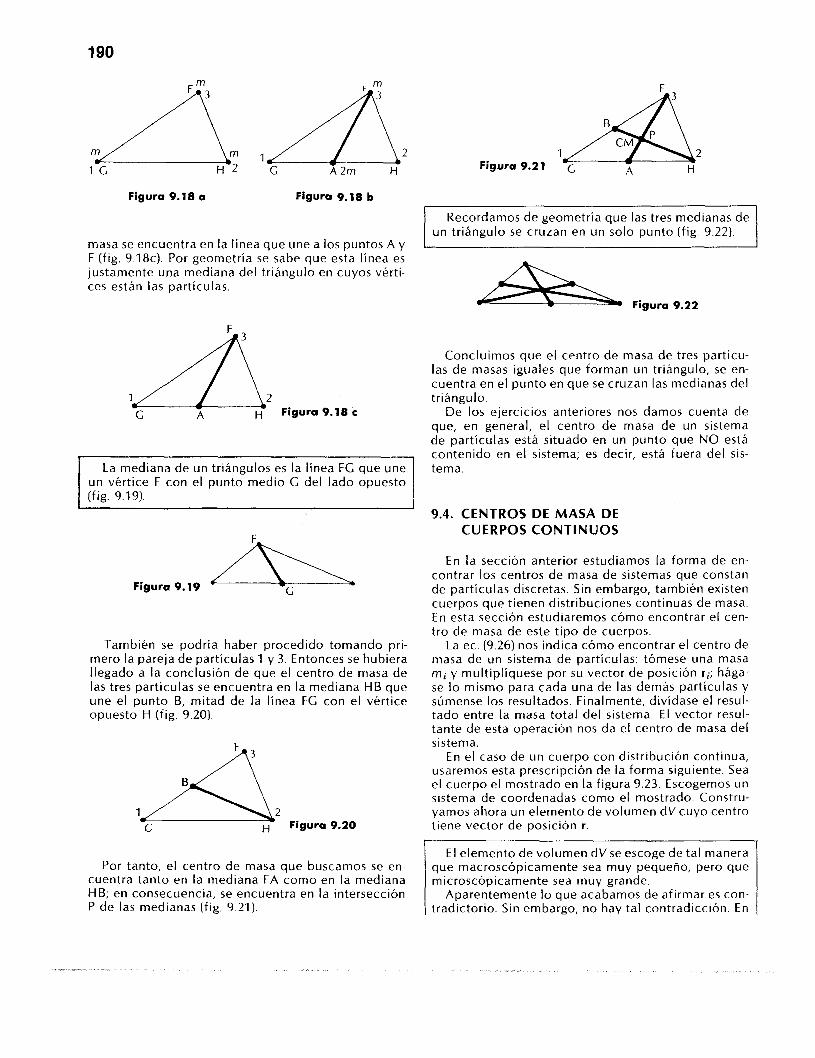
190
Figura 9.18 a Figura 9.18 b
masa se encuentra en la línea que une a los puntos A y F ( f ig . 9 .18~) . Por geometría se sabe que esta línea es justamente una mediana del triángulo en cuyos vérti- ces están las partículas.
I La mediana de un triángulos es la línea FC que une un vértice F con el punto medio C del lado opuesto (fig. 9.19).
c
También se podría haber procedido tomando pri- mero la pareja de partículas 1 y 3. Entonces se hubiera llegado a la conclusión de que el centro de masa de las tres partículas se encuentra en la mediana HB que une el punto B. mitad de la línea FC con el vértice opuesto H (fig. 9.20).
Por tanto, el centro de masa que buscamos se en- cuentra tanto en la mediana FA como en la mediana HB; en consecuencia, se encuentra en la intersección P de las medianas (fig. 9.21).
Recordamos de geometría que las tres medianas de un triángulo se cruzan en un solo punto (fig. 9.22).
& Figura 9.22
Concluimos que el centro de masa de tres partícu- las de masas iguales que forman un triángulo, se en- cuentra en el punto en que se cruzan las medianas del triángulo.
De los ejercicios anteriores nos damos cuenta de que, en general, el centro de masa de un sistema de partículas está situado en un punto que NO está contenido en el sistema; es decir, está fuera del sis- tema.
9.4. CENTROS DE M A S A DE CUERPOS CONTINUOS
En la sección anterior estudiamos la forma de en- contrar los centros de masa de sistemas que constan de partículas discretas. Sin embargo, también existen cuerpos que tienen distribuciones continuas de masa. En esta sección estudiaremos cómo encontrar el cen- tro de masa de este t ipo de cuerpos.
La ec. (9.26) nos indica cómo encontrar el centro de masa de un sistema de partículas: tómese una masa mi y multiplíquese por su vector de posición r;; hága- se lo mismo para cada una de las demás particulas y súmense los resultados. Finalmente, divídase el resul- tado entre la masa total del sistema. E l vector resul- tante de esta operación nos da el centro de masa del sistema.
En el caso de un cuerpo con distribución continua, usaremos esta prescripción de la forma siguiente. Sea el cuerpo el mostrado en la figura 9.23. Escogemos un sistema de coordenadas como el mostrado. Constru- yamos ahora un elemento de volumen dV cuyo centro tiene vector de posición r .
~~
E I elemento de volumen dV se escoge de tal manera que macroscópicamente sea muy pequeño, pero que microscópicamente sea muy grande.
Aparentemente lo que acabamos de afirmar es con- tradictorio. Sin embargo, no hay tal contradicción. En
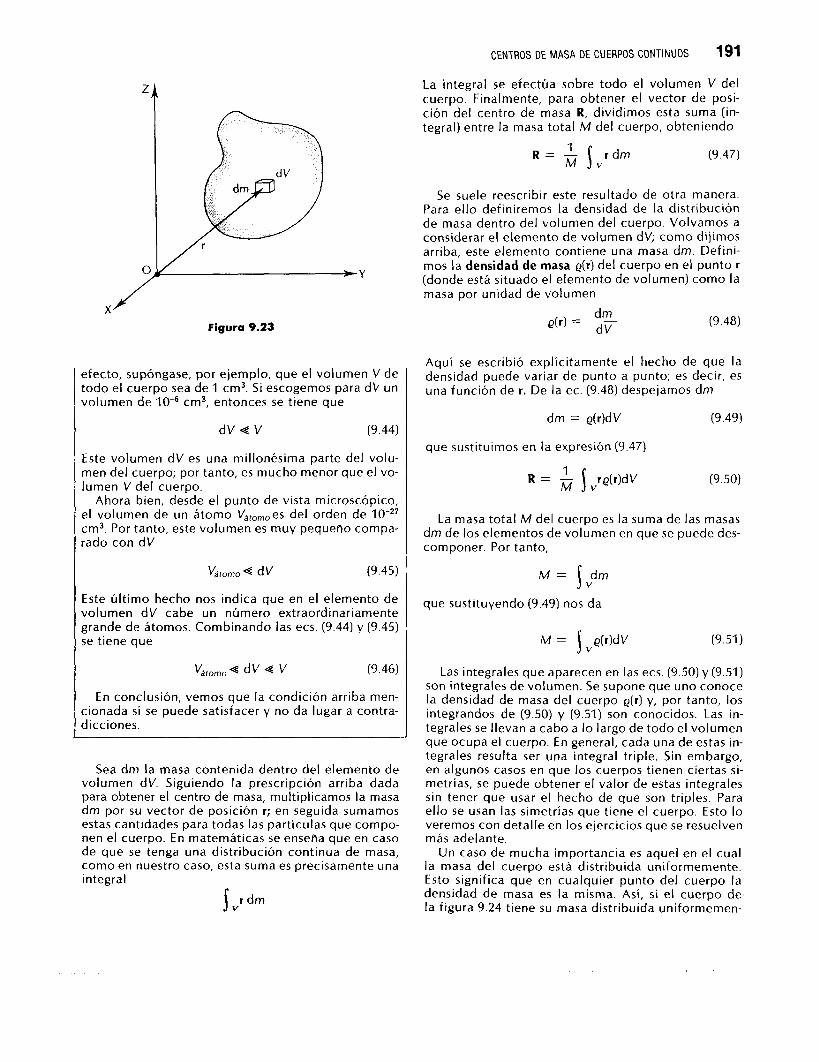
CENTROS DE MASA DE CUERPOS CONTINUOS 191
z j,
X
La integral se efectúa sobre todo el volumen V del cuerpo. Finalmente, para obtener el vector de posi- ción del centro de masa R , dividimos esta suma (in- tegral) entre la masa total M del cuerpo, obteniendo
R = 3 r d m (9.47)
Se suele reescribir este resultado de otra manera. Para ello definiremos la densidad de la distribución de masa dentro del volumen del cuerpo. Volvamos a considerar el elemento de volumen dV; como dij imos arriba, este elemento contiene una masa dm. Defini- mos la densidad de masa e(r) del cuerpo en el punto r (donde está situado el elemento de volumen) como la masa por unidad de volumen
V
=-Y
Figura 9.23
efecto, supóngase, por ejemplo, que el volumen V de todo el cuerpo sea de 1 cm3. Si escogemos para db un volumen de 10"j cm3, entonces se tiene que
dV a V (9.44)
Este volumen dV es una millonésima parte del volu- men del cuerpo; por tanto, es mucho menor que el vo- lumen V del cuerpo.
Ahora bien, desde el punto de vista microscópico, el volumen de un átomo Vátornoes del orden de cm3. Por tanto, este volumen es muy pequeño compa- rado con dV
Este últ imo hecho nos indica que en el elemento de volumen dV cabe un número extraordinariamente grande de átomos. Combinando las ecs. (9.44) y (9.45) se tiene que
Vátorno -e dV 4 V (9.46)
En conclusión, vemos que la condición arriba men- cionada sí se puede satisfacer y no da lugar a contra- dicciones.
Sea dm la masa contenida dentro del elemento de volumen dV. Siguiendo la prescripción arriba dada para obtener el centro de masa, multiplicamos la masa dm por su vector de posición r; en seguida sumamos estas cantidades para todas las partículas que compo- nen el cuerpo. En matemáticas se enseña que en caso de que se tenga una distribución continua de masa, como en nuestro caso, esta suma es precisamente una integral
S
(9.48)
Aquí se escribió explícitamente el hecho de que la densidad puede variar de punto a punto; es decir, es una función de r. De la ec. (9.48) despejamos dm
dm = e(r)dV (9.49)
que sustituimos en la expresión (9.47)
(9.50)
La masa total M del cuerpo es la suma de las masas dm de los elementos de volumen en que se puede des- componer. Por tanto,
M = ! $ m
que sustituyendo (9.49) nos da
M = e(rldV (9.51) V
Las integrales que aparecen en las ecs. (9.50) y (9.51) son integrales de volumen. Se supone que uno conoce la densidad de masa del cuerpo e(r) y, por tanto, los integrandos de (9.50) y (9.51) son conocidos. Las in- tegrales se llevan a cabo a lo largo de todo el volumen que ocupa el cuerpo. En general, cada una de estas in- tegrales resulta ser una integral triple. Sin embargo, en algunos casos en que los cuerpos tienen ciertas si- metrías, se puede obtener el valor de estas integrales sin tener que usar el hecho de que son triples. Para ello se usan las simetrías que tiene el cuerpo. Esto lo veremos con detalle en los ejercicios que se resuelven más adelante.
Un caso de mucha importancia es aquel en el cual la masa del cuerpo está distribuida uniformemente. Esto significa que en cualquier punto del cuerpo la densidad de masa es la misma. Así, s i el cuerpo de, la figura 9.24 tiene su masa distribuida uniformemen-
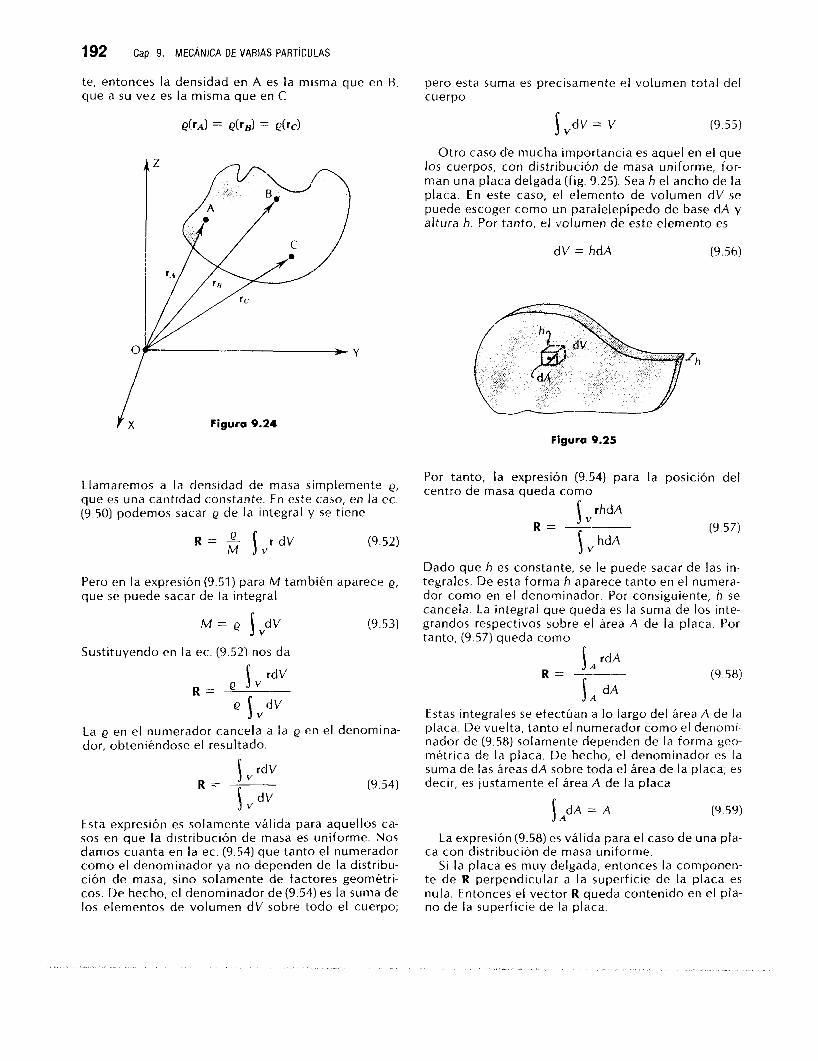
192 Cap. 9. MECANICA DE VARIAS PART~CULAS
te, entonces la densidad en A es la misma que en B, pero esta suma es precisamente el volumen total del que a su vez es la misma que en C cuerpo
e(r.4) = e(rBl = ebc) VdV = V (9.55)
z Ot ro caso de mucha importancia es aquel en el que los cuerpos, con distribución de masa uniforme, for- man una placa delgada (fig. 9.25). Sea h el ancho de la placa. En este caso, el elemento de volumen dV se puede escoger como un paralelepípedo de base dA y altura h. Por tanto, el volumen de este elemento es
dV = hdA (9.56)
c
i Figura 9.24 Figura 9.25
Llamaremos a l a densidad de masa simplemente e, centro de queda que es una cantidad constante. En este ca50, en la ec. (9.50) podemos sacar e de la integral y se tiene
Por tanto, la expresión (9.54) para la posición del
\ rhdA V R = -- (9.57)
R = 2 1 r d V (9.52) hdA M v V
Pero en la expresión (9.51) para M también aparece e, que se puede sacar de la integral
M = Q j $ V (9.53)
Sustituyendo en la ec. (9.521 nos da
\ rdV R = e v
e SvdV La e en el numerador cancela a la e en el denomina- dor, obteniéndose el resultado.
\ rdV R =
V (9.54)
Esta expresión es solamente válida para aquellos ca- s o s en que la distribución de masa es uniforme. Nos damos cuanta en la ec. (9.54) que tanto el numerador como el denominador ya no dependen de la distribu- ción de masa, sino solamente de factores geométri- cos. De hecho, el denominador de (9.54) es la suma de los elementos de volumen dV sobre todo el cuerpo;
Dado que h es constante, se le puede sacar de las in- tegrales. De esta forma h aparece tanto en el numera- dor como en el denominador. Por consiguiente, h se cancela. La integral que queda es la suma de los inte- grandos respectivos sobre el área A de la placa. Por tanto, (9.57) queda como 1 rdA
A R = (9.58)
S A
Estas integrales se efectúan a lo largo del área A de la placa. De vuelta, tanto el numerador como el denomi- nador de (9.58) solamente dependen de la forma geo- mktrica de la placa. De hecho, el denominador es la suma de las áreas dA sobre toda el área de la placa; es decir, es justamente el área A de la placa
j A d A = A (4.59)
La expresión (9.58) es válida para el caso de una pla- ca con distribución de masa uniforme.
Si la placa es muy delgada, entonces la componen- te de R perpendicular a la superficie de la placa es nula. Entonces el vector R queda contenido en el pla- no de la superficie de la placa.
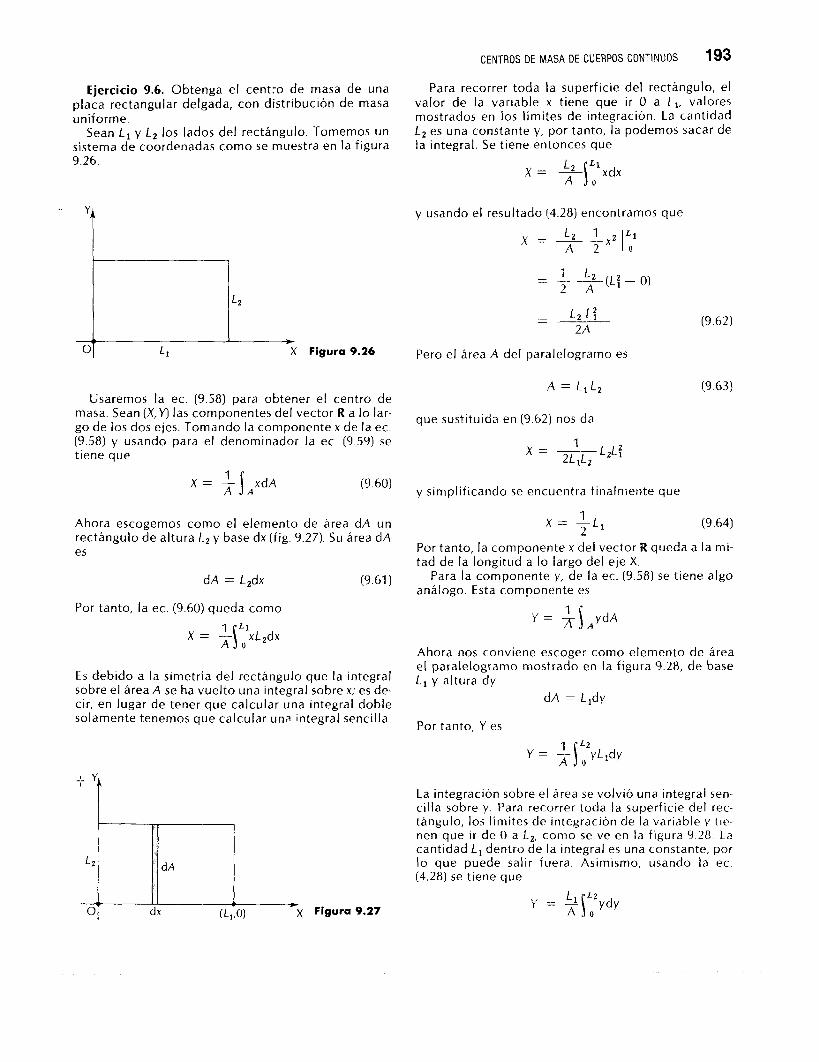
CENTROS DE MASA DE CUERPOS CONTINUOS 193
Ejercicio 9.6. Obtenga el cent:o de masa de una placa rectangular delgada, con distribución de masa uniforme.
Sean L1 y L2 los lados del rectángulo. Tomemos un sistema de coordenadas como se muestra en la figura 9.26.
I L2 I
oT L , X Figura 9.26 *
Usaremos la ec. (9.58) para obtener el centro de masa. Sean (X,y) las componentes del vector R a lo lar- go de los dos ejes. Tomando la componente x de la ec. (9.58) y usando para el denominador la ec. (9.59) se tiene que
X = - j xdA 1 A A (9.60)
Ahora escogemos como el elemento de área dA un rectángulo de altura L2 y base dx (fig. 9.27). Su área dA es
dA = L2dx (9.61)
Por tanto, la ec. (9.60) queda como
X = - xL2dx A o sL1
Es debido a la simetría del rectángulo que la integral sobre el área A se ha vuelto una integral sobre x; es de- cir, en lugar de tener que calcular una integral doble solamente tenemos que calcular una integral sencilla.
Para recorrer toda la superficie del rectángulo, el valor de la variable x tiene que ir O a L1, valores mostrados en los límites de integración. La cantidad L2 es una constante y, por tanto, la podemos sacar de la integral. Se tiene entonces que
X = -\L1xdx L2 A o
y usando el resultado (4.28) encontramos que
- 1 2
- -- --- (L: - O) 1 2
A
Pero el área A del paralelograrno es
A L1 L2
que sustituida en (9.62) nos da
(9.62)
(9.63)
y simplificando se encuentra finalmente que
1 2
x = "L, (9.64)
Por tanto, la componente x del vector R queda a la mi- tad de la longitud a lo largo del eje X.
Para la componente y, de la ec. (9.58) se tiene algo análogo. Esta componente es
1 " y = X l A Y d A
Ahora nos conviene escoger como elemento de área el paralelogramo mostrado en la figura 9.28, de base L, y altura dy
dA = L,dy
Por tanto, Y es
La integración sobre el área se volvió una integral sen- cilla sobre y. Para recorrer toda la superficie del rec- tángulo, los límites de integración de la variable y tie- nen que ir de O a L 2 , como se ve en la figura 9.28 La cantidad L , dentro de la integral es una constante, por lo que puede salir fuera. Asimismo, usando la ec. (4.28) se tiene que
Y = 'SL2ydy L A o
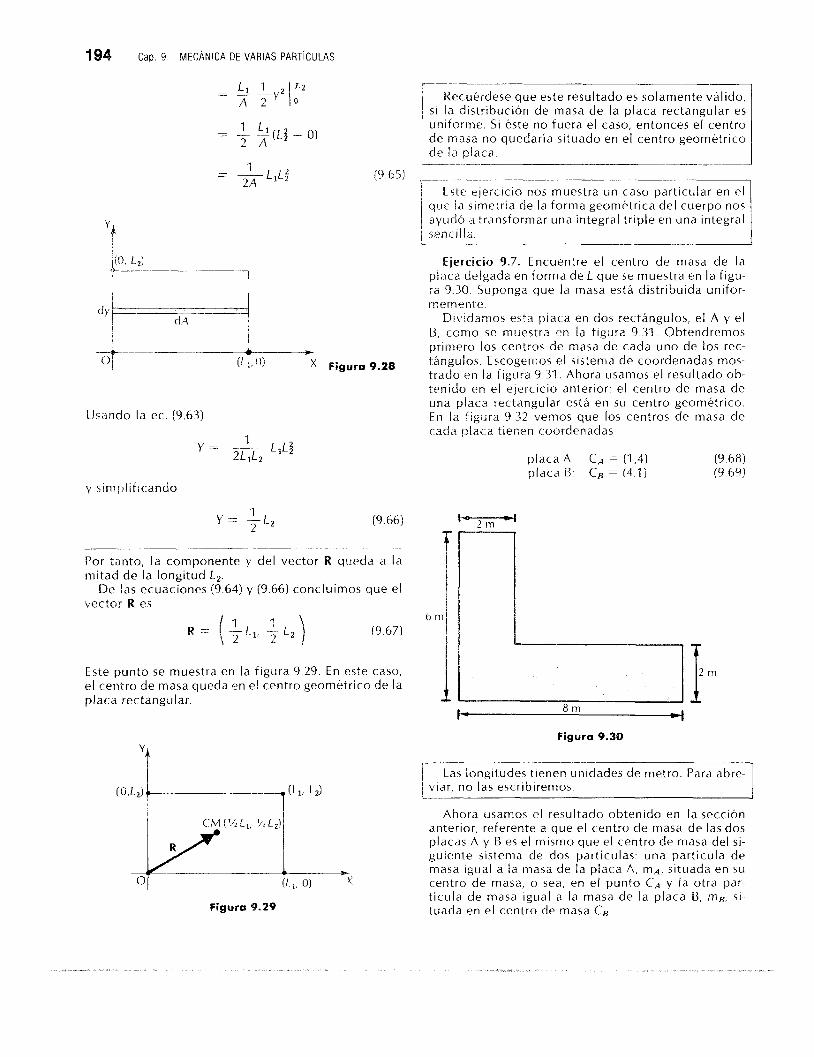
19 Cao. 9. MECANICA DE VARIAS PARTíCULAS
'f ! . 1'0, L,) I , I
Usando la ec. (9.63)
1 y = I__- 2LlL2 1112
y simplificando
1 2 Y = - L L , 19.66)
~____"____~"~~___ .. ~~~
Por tanto, la componente y del vector R qtleda a la mitad de la longitud L2.
De las ecuaciones (9.64) y (9.66) concluimos que el vector R es
(9.67)
Este punto se muestra en la figura 9.29. En este caso, el centro de masa queda en el centro geométrico de la placa rectangular.
't I
(9 65)
que id sirnetria de la forma geomktrica del cuerpo nos ayudb a transformar una integral triple en una integral
______" ~.~~
Figura 9.29
Recuérdese que este resultado es solamente válido, si la distribución de masa de la placa rectangular es uniforme. Si este no fuera el caso, entonces el centro de masa no quedaría situado en el centro geométrico de la placa.
Ejercicio 9.7. Encuentre el centro de masa de la placa delgada en forma de L que se muestra en la figu- ra 9.30. Suponga que la masa está distribuida unifor- memente.
Di::idamos esta placa en dos rectángulos, el A y el B, como se muestra en la figura 9.31. Obtendremos primero los centros de masa de cada uno de los rec- tángulos. Escogemos el sisterna de coordenadas mos- trado en la figura 9.31. Ahora usamos e l resultado ob- tenido en el ejerclcio anterior: el centro de masa de una placa rectangular está en su centro geométrico. En I d i igtira 9 32 vernos que los centros de masa de cada placa tienen coordenadas
placa A . CA = (1,4) (9.68) placa M: C R = (4.1) (9 69)
Figura 9.30
_ _ _ _ " ~ " _ ~ _ _ . _ _ _ Las longitudes tienen unidades de
viar, no las escribiremos
Ahora usamos el resultado obtenido en la sección anterior, referente a que el centro de masa de las dos placas A y B es el mismo que el centro de masa del si- guiente sistema de dos partículas: una partícula de masa igual a la masa de la placa A, mA, situada en su centro de masa, o sea, en e l punto Ca y la otra par- tícula de masa igual a la masa de la placa B, mB, S I -
tuada en el centro de masa CR.
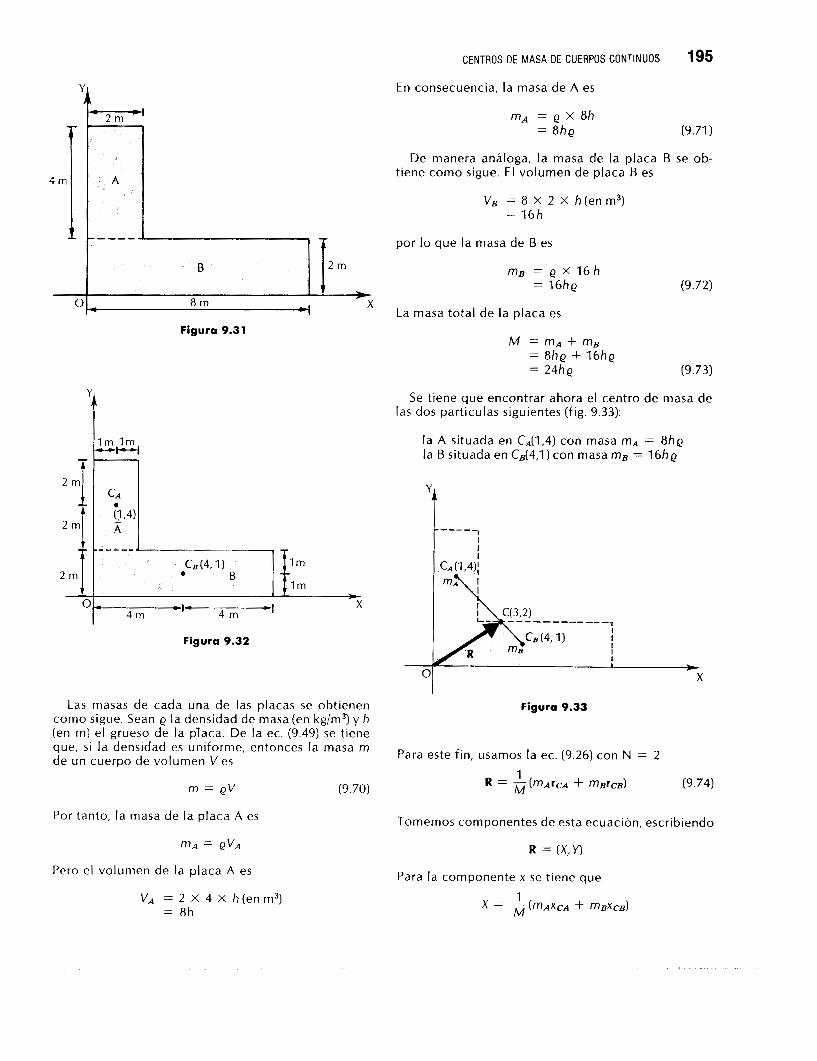
CENTROS DE MASA DE CUERPOS CONTINUOS 195
En consecuencia, la masa de A es
Figura 9.31
2 r n 2rn[M 4 C""" -
Figura 9.32
Las masas de cada una de las placas se obtienen como sigue. Sean e la densidad de masa (en kg/m3) y h (en m) el grueso de la placa. De la ec. (9.49) se tiene que, s i la densidad es uniforme, entonces la masa m de un cuerpo de volumen Ves
m = QV (9.70)
Por tanto, la masa de la placa A es
mA = eVA
Pero el volumen de la placa A es
VA = 2 X 4 X h(enm3) = 8h
mA = e x 8h = 8he (9.71)
De manera análoga, la masa de la placa B se ob- tiene como sigue. E l volumen de placa B es
VB = 8 X 2 x h (en m3) = 16h
por lo que la masa de B es
mB = e X 1 6 h = 16hg (9.72)
La masa total de la placa es
M = mA + mB = 8he + 16he = 24he (9.73)
Se tiene que encontrar ahora el centro de masa de las dos partículas siguientes (fig. 9.33):
la A situada en CA(1,4) con masa ma = 8he la B situada en Cd4,I) con masa rnB = 16hg
y4 I"", I
Figura 9.33
Para este fin, usamos la ec. (9.26) con N = 2 R = M ( ~ A ~ C A 1 + mBrcd (9.74)
Tomemos componentes de esta ecuación, escribiendo
R = K v )
Para la componente x se tiene que
X = ~ ( ~ A X C A 1 + mBxcB)
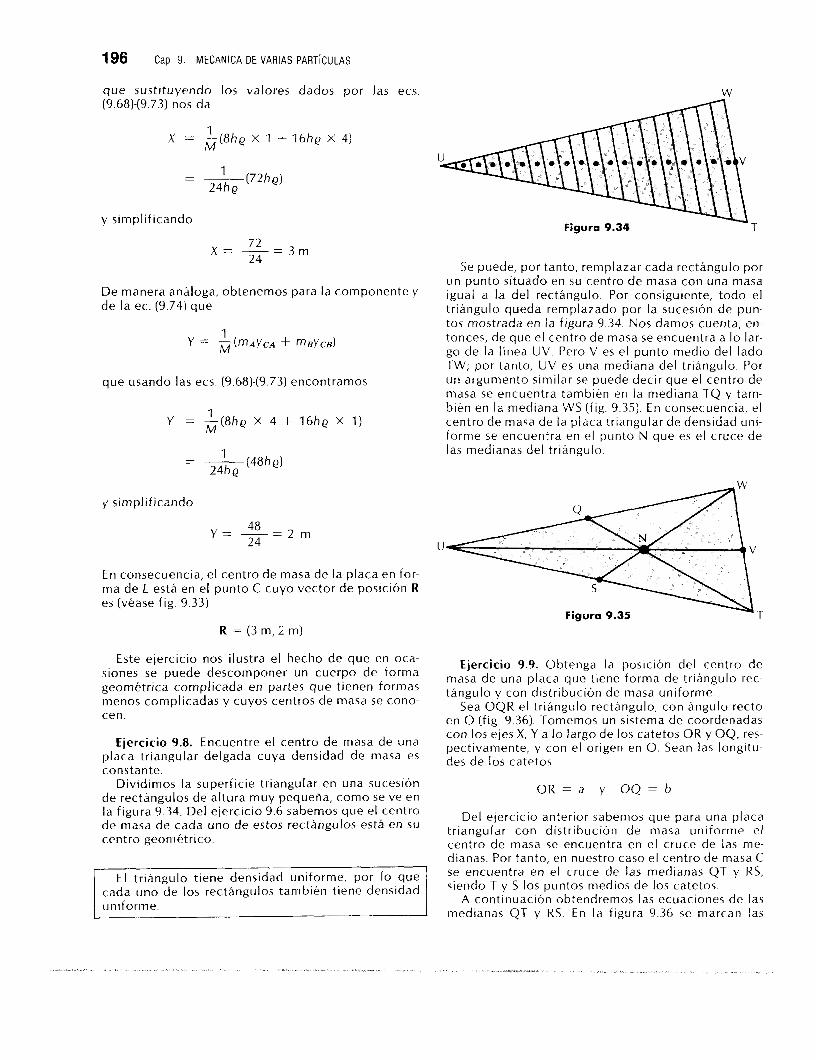
196 Cap. 9. MECANICA DE VARIAS PARTíCULAS
que sustituyendo los valores dados por las ecs (9.68H9.73) nos da
1 M X = -(8he X 1 + 16he X 4)
y simplificando
De manera análoga, obtenemos para la componente y de la ec. (9.74) que
que usando las ecs. (9.68)-(9.73) encontramos
Y = -(8he X 4 + 16he X 1) 1 M
simplif icando
En consecuencia, el centro de masa de la placa en for- ma de L está en el punto C cuyo vector de posición R es (véase fig. 9.33)
R = (3 m, 'i m)
Este ejercicio nos ilustra el hecho de que en oca- siones se puede descomponer un cuerpo de forma geométrica complicada en partes que tienen formas menos complicadas y cuyos centros de masa se cono- cen.
Ejercicio 9.8. Encuentre el centro de masa de una placa triangular delgada cuya densidad de masa es constante.
Dividimos la superficie triangular en una sucesión de rectángulos de altura muy pequeña, como se ve en la figura 9.34. Del ejercicio 9.6 sabemos que el centro de masa de cada uno de estos rectángulos está en su centro geométrico.
E l triángulo tiene densidad uniforme, por lo que cada uno de los rectángulos también tiene densidad uniforme.
W
Se puede, por tanto, remplazar cada rectángulo por un punto situado en su centro de masa con una masa igual a la del rectángulo. Por consiguiente, todo el triángulo queda remplazado por la sucesión de pun- tos mostrada en la figura 9.34. Nos damos cuenta, en- tonces, de que el centro de masa se encuentra a lo lar- go de la línea UV. Pero V es el punto medio del lado TW; por tanto, UV es una mediana del triángulo Por un argumento similar se puede decir que el centro de masa se encuentra también en la mediana TQ y tam- bién en la mediana WS (fig. 9.35). En consecuencia, e l centro de maFa de la placa triangular de densidad uni- forme se encuentra en el punto N que es el cruce de las medianas del triángulo
Ejercicio 9.9. Obtenga la posiclón del centro de masa de una placa que tiene forma de triángulo rec- tángulo y con distribución de masa uniforme.
Sea OQR el triángulo rectángulo, con ángulo recto en O (fig. 9.36). Tomemos un sistema de coordenadas con los ejes X, Y a lo largo de los catetos OR y OQ, res- pectivamente, y con el origen en O. Sean las longitu- des de los catetos
O R = a y O Q = b
Del ejercicio anterior sabemos que para una placa triangular con distribución de masa uniforme el centro de masa se encuentra en el cruce de las me- dianas. Por tanto, en nuestro caso el centro de masa C se encuentra en el cruce de las medianas QT y RS, siendo T y S los puntos medios de los catetos.
A continuación obtendremos las ecuaciones de las medianas QT y RS En la figura 9.36 se marcan las
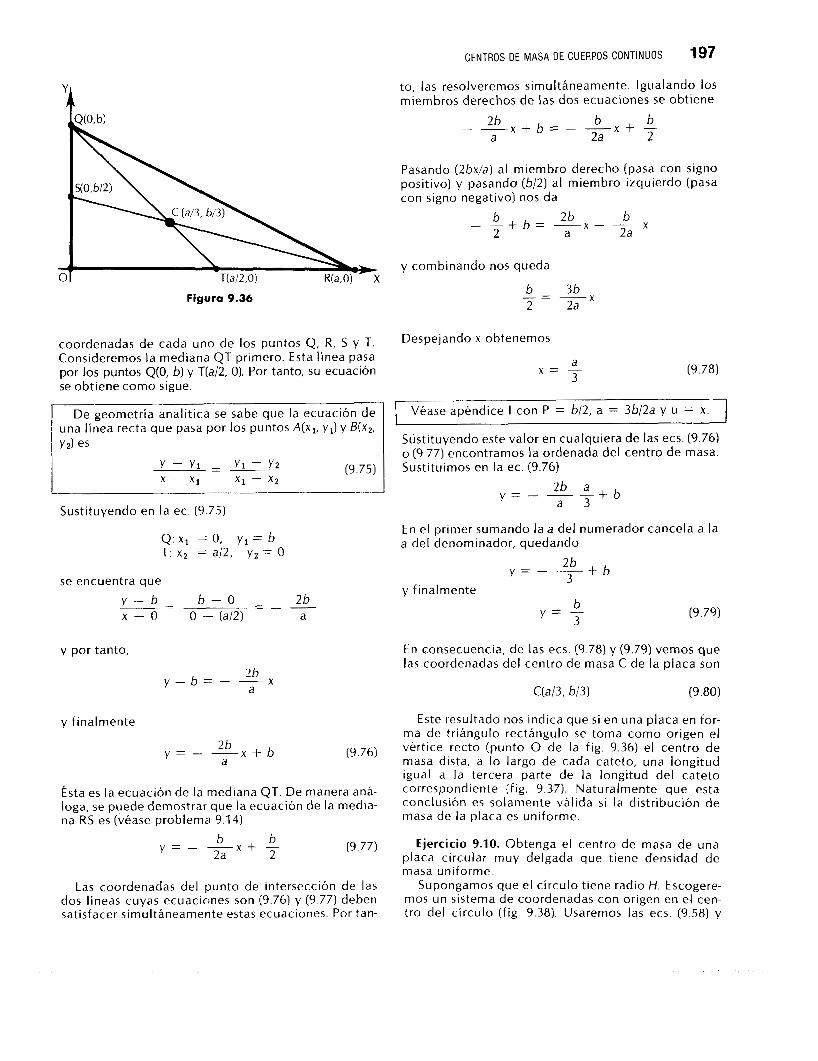
CENTROS DE MASA DE CUERPOS CONTINUOS 197
to, las resolveremos simultáneamente. Igualando los miembros derechos de las dos ecuaciones se obtiene
Figura 9.36
2b b b a
x + b = - - 2a x + -
2 “
Pasando (2bx/a) al miembro derecho (pasa con signo positivo) y pasanda (b/2) al miembro izquierdo (pasa con signo negativo) nos da
b 2b b 2 a 2a
- “+b= - x - - X
y combinando nos queda
b - 3b 2 2a ” ~ X
coordenadas de cada uno de los puntos Q, R, S y T. Despejando x Obtenemos Consideremos la mediana QT primero. Esta linea pasa por los puntos Q(0, b) y T(a/2, O). Por tanto, su ecuación x = -
a
se obtiene como sigue. 3
(9.78)
De geometría analítica se sabe que la ecuación de una línea recta que pasa por los puntos Ab , , Y I ) Y B(xz, Y21 es
Y - Y 1 = Y 1 - Y 2 (9.75) x - x 1 x 1 - x 2
Sustituyendo en la ec. (9.75)
Q: x 1 = O, y 1 = b T: x 2 = ai2, y 2 = O
se encuentra que
Y ” b = b - 0 - 2b x - O O - ( 4 2 ) a
”-
y por tanto,
y - b = - - 2b x a
I Véase apéndice I con P = b/2, a = 3b/2a y u = x. I Sustituyendo este valor en cualquiera de las ecs. (9.76) o (9.77) encontramos la ordenada del centro de masa. Sustituimos en la ec. (9.76)
En el primer sumando la a del numerador cancela a la a del denominador, quedando
Y = - - 2b + b 3 y finalmente
b Y = ” (9.79)
En consecuencia, de las ecs. (9.78) y (9.79) vemos que las coordenadas del centro de masa C de la placa son
CW3, b/3) (9.80)
y finalmente Este resultado nos indica que s i en una placa en for-
2b ma de triángulo rectángulo se toma como origen el
(9,76) vértice recto (punto O de la fig. 9.36) el centro de a masa dista, a lo largo de cada cateto, una longitud
igual a la tercera parte de la longitud del cateto Esta es la de la mediana QT, manera aná- correspondiente (fig. 9.37). Naturalmente que esta logs, se puede demostrar que la de la media- conclusión es solamente válida s i la distribución de na RS es (véase problema 9.14)
y = - - x + b
masa de la placa es uniforme.
b b Y = - - x + - 2a 2 (9.77) Ejercicio 9.10. Obtenga el centro de masa de una
placa circular muy delgada que tiene densidad de masa uniforme.
Las coordenadas del punto de intersección de las Supongamos que el círculo tiene radio H . Escogere- dos líneas cuyas ecuaciones son (9.76) y (9.77) deben mos un sistema de coordenadas con origen en el cen- satisfacer simultáneamente estas ecuaciones. Por tan- tro del círculo (fig. 9.38). Usaremos las ecs. (9.58) y
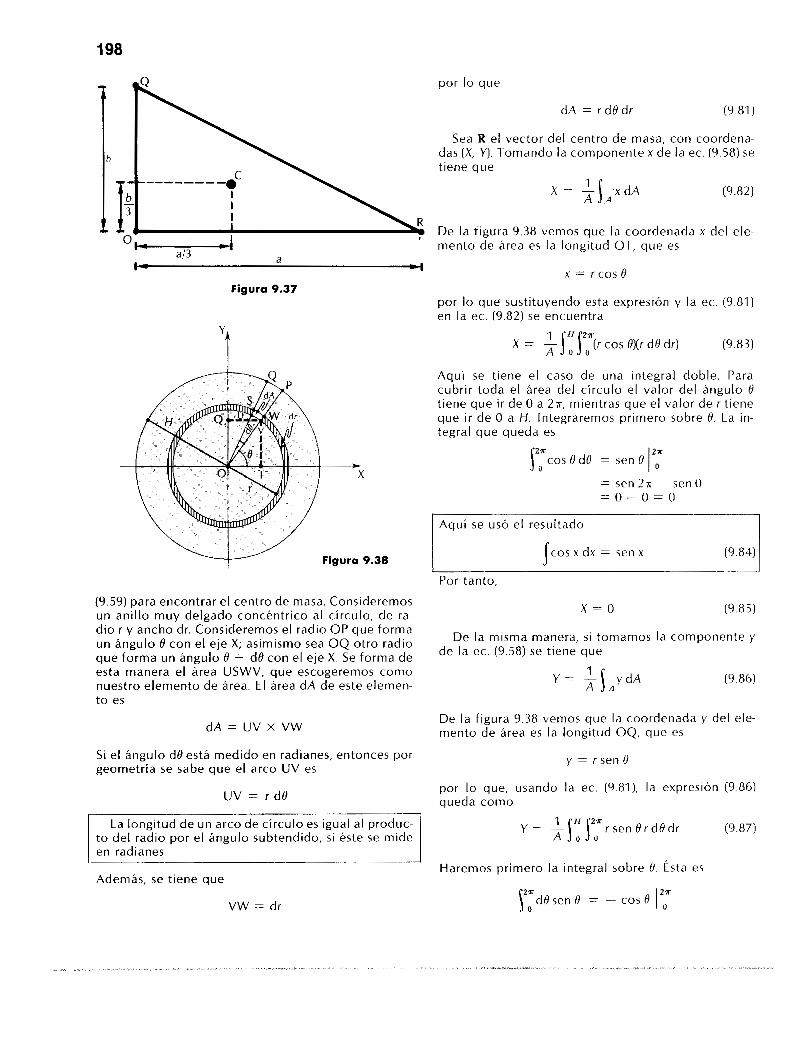
(9.59) para encontrar el centro de masa. Consideremos un anil lo muy delgado concéntrico al círculo, de ra- dio r y ancho dr. Consideremos el radio OP que forma un ángulo 8 con el eje X; asimismo sea OQ otro radio que forma un ángulo 8 + dB con el eje X. Se forma de esta manera el área USWV, que escogeremos como nuestro elemento de área. E l área dA de este elemen- t o es
dA = U V X V W
Si el ángulo dB está medido en radianes, entonces por geometría se sabe que el arco UV es
U V = r d8
La longitud de un arco de círculo es igual al produc- to del radio por el ángulo subtendido, si éste se mide en radianes.
Además, se tiene que
VW = dr
por lo que
dA = r dB dr (9.81)
Sea R el vector del centro de masa, con coordena- das (X, v). Tomando la componente x de la ec. (9.58) se tiene que
X = -1 .xdA 1 A A (9.82)
De la tigura 9.38 vemos que la coordenada x del ele- mento de área es la longitud OT, que es
x = r cos 6’
por lo que sustituyendo esta expresión y la ec. (9.81) en la ec. (9.82) se encuentra
X = nj o s o ( r cos 8)(r dB dr) (9.83) 1 H 2 7 ~
Aquí se tiene el caso de una integral doble. Para cubrir toda el área del círculo el valor del ángulo 0 tiene que ir de 0 a 27r, mientras que el valor de r tiene que ir de O a H. Integraremos primero sobre 8. La in- tegral que queda es
s”,”cos 8 d8 = sen 8 12; = sen 27r - sen O = o ” o = o
i Aquí se usó el resultado
cos x dx = sen x (9.84)
Por tanto,
X = O (9.85)
De la misma manera, s i tomamos la componente y de la ec. (9.58) se tiene que
(9.86)
De la figura 9.38 vemos que la coordenada y del ele- mento de área es la longitud OQ, que es
y = r sen 0
por lo que, usando la ec. (9.81), la expresión (9.86) queda como
Y = x s , l r sen8rdOdr (9.87) 1 H 27T
Haremos primero la integral sobre B. Ésta es

CENTROS DE MASA DE CUERPOS CONTINUOS 199 = - (cos 27r - cos O) = " ( I - 1 ) = O Y = $1; [ * ( r sen O)(r d8dr) (9.91)
O I T - Se usó el resultado ~ T l La integral sobre 8 es ahora sen x dx = - cos x ?T 1 d o s e n e = - c o s 8 l o ~-
Por tanto, Aquí se usó el resultado (9.88). Por tanto, esta integral
Y = O (9.89) es
Las ecs. (9.85) y (9.89) nos dice que !:desen 8 = - (cos T - COSO) = -(-I -1) - - " ( " 2 ) = 2 (9.92)
R = (O, O)
E s decir, el centro de masa de la placa circular unifor- me está en el centro del círculo.
Sustituyendo este resultado en (9.91) tenemos que
Ejercicio 9.11. Obtenga el centro de masa de una placa semicircular de radio H, muy delgada y de den- sidad uniforme.
En la figura 9.39 se muestra la situación en este caso. Nos damos cuenta de que el planteamiento de este problema es casi igual al del ejercicio 9.10, con la única diferencia que ahora hay que cubrir solamente la mitad del círculo, por lo que el ángulo 8 de las inte- grales (9.83) y (9.87) va de O a 7 r . Entonces, la integral sobre 8 que aparece en (9.83) ahora es
= sen 7r - sen O = b - o = o
- 2 - x ( H 3 - O)
- 2 ~ 3 - - 3A
Aquí se usó la ec. (4.28) con n = 2 .
Ahora recordamos que el área de una mitad de un círculo de radio H es
A = - aHZ 2
que sustituida en la última ecuación nos da
Y = 2 ~3
3( 7rH2/2)
y simplificando se encuentra que
y = ~ 4H 37r (9.93)
En consecuencia, el centro de masa de la placa semi- circular uniforme se encuentra en el punto C cuyo vector de posición R es
Figura 9.39 R = 0,- ( 3 Este punto se muestra en la figura 9.40.
Aquí usamos la ec. (9.84). Ejercicio 9.12. Encuentre el centro de masa de la
Por tanto, de la ec. (9.83) se tiene que mitad de una esfera de radio H con distribución de masa uniforme.
gura 9.41. Se escoge un sistema de coordenadas como Para Y se tiene ahora que se ve en esa misma figura. En este problema vamos a
x = o (9.90) Sea la semiesfera en cuestión la mostrada en la fi-
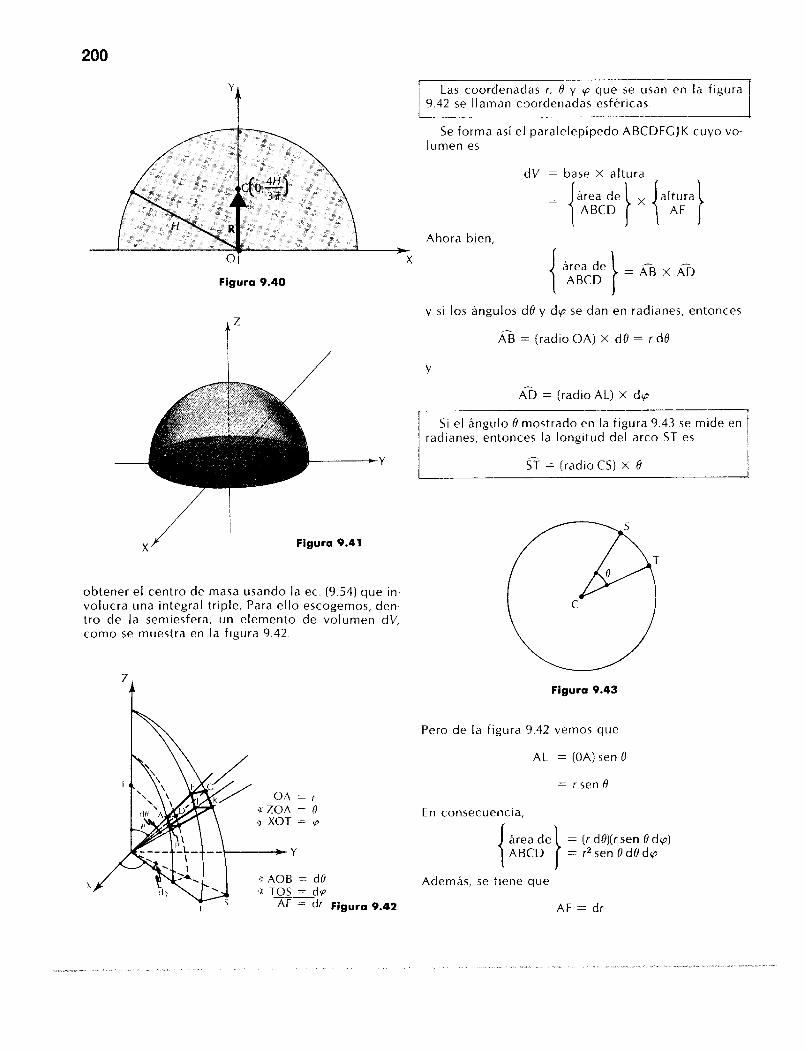
rpLas coordenadas r, 8 y p que se usan en la figura I 9.42 se llaman cDordenadas esféricas. I
"---+Y
X J I Figura 9.41
obtener el centro de masa usando la ec. (9.54) que in- volucra una integral triple. Para el lo escogemos, den- tro de la semiesfera, un elemento de volumen dv, como se muertra en la figura 9.42.
'4
% A 0 6 = d0
Figura 9.42
y s i los ángulos d8 y dp se dan en radianes, entonces
K B = (radio OA) X dB = r d0
Y
A% = (radio AL) X dp
Si el ángulo 8 mostrado en la figura 9.43 se mide -
radianes, entonces la longitud del arco ST es ! I s? = (radio CS) X 8
Figura 9.43
Pero de la figura 9.42 vemos que
AL = (OA) sen 8
= r sen 0
En consecuencia.
ABCD = r2 sen 0 d0 dp área de = ( r d8)(r sen 0 dp)
Además, se tiene que
AF = dr
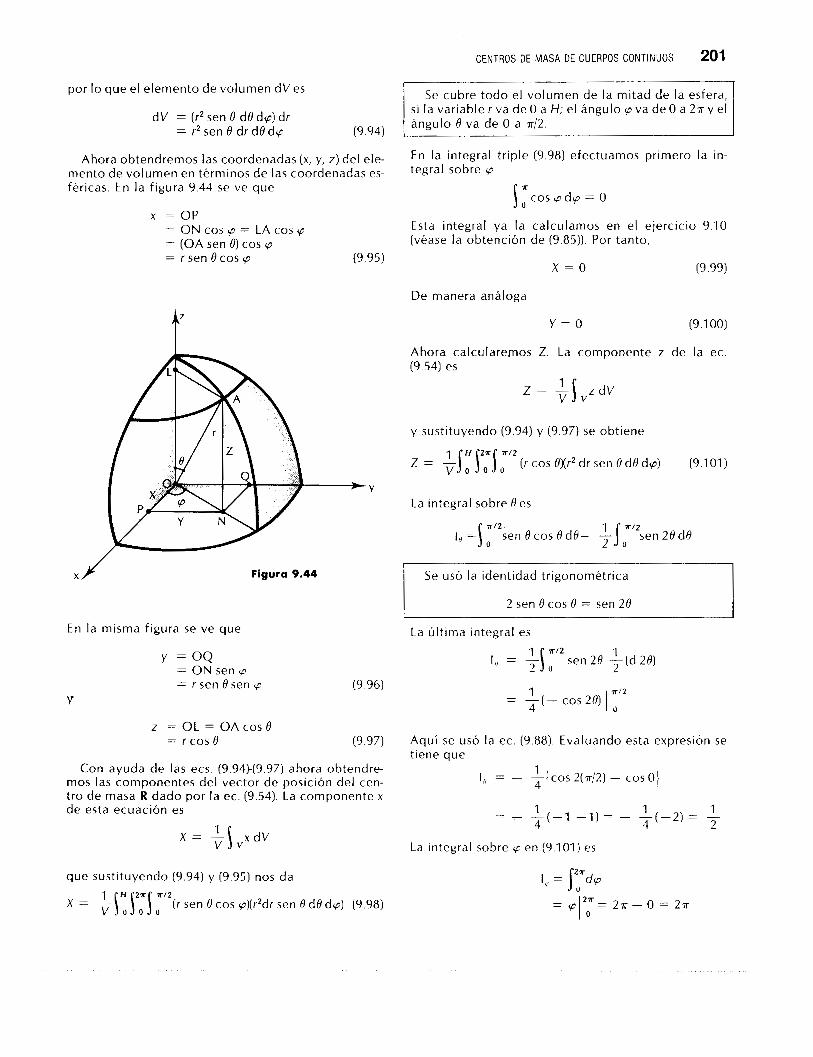
por lo que el elemento de volumen dVes
dV = (r2 sen O dB dp) dr = r2 sen O dr d8 dp (9.94)
Ahora obtendremos las coordenadas (x, y, z) del ele- mento de volumen en términos de las coordenadas es- féricas. En la figura 9.44 se ve que
x = OP = ON COS p = LA cos p = (OA sen O) cos p = rsenOcosp (9.95)
t‘
X J Figura 9.44
En la misma figura se ve que
V
Y = O Q = ON sen p = rsen Osen p (9.96)
z = OL = OAcosO = r cos 8 (9.97)
Con ayuda de las ecs. (9.94)-(9.97) ahora obtendre- mos las componentes del vector de posición del cen- tro de masa R dado por la ec. (9.54). La componente x de esta ecuación es
X = - \ x d V 1 v v
que sustituyendo (9.94) y (9.95) nos da
x = - \ 1 1 (r sen O C O S p)(r2dr sen Od8dp) (9.98) 1 H 27r ?r12
v u 0 0
CENTROS DE MASA DE CUERPOS CONTINUOS 201
Se cubre todo el volumen de la mitad de la esfera, s i la variable r va de O a H; el ángulo p va de O a 2a y el ángulo O va de O a 7r/2.
En la integral triple (9.98) efectuamos primero la in- tegral sobre p
7r s u c o s p d p = O
Esta integral ya la calculamos en el ejercicio 9.10 (véase la obtención de (9.85)). Por tanto,
x = o (9.99)
De manera análoga
Y = O (9.1 00)
Ahora calcularemos Z. La componente z de la ec (9.54) es
Z = - z ~ V ’ S v v
y sustituyendo (9.94) y (9.97) se obtiene
Z = -S S (r cos 8)(r2 dr sen 8dO dp) (9.101) 1 H 2?r 7r12
v o o o
La integral sobre 8 es
Se usó la identidad trigonométrica
2 sen 8 cos 8 = sen 20
La última integral es
I,, = -1 sen 28 - (d 20) 1 ?r12 1 2 u 2
1 4 o
- X12 - -(- cos 28) I
Aquí se usó la ec. (9.88). Evaluando esta expresión se tiene que
I H = - -cos 1 2(7r/2) - coso 4
La integral sobre p en (9.101) es
I < =
= .I*;= 27r - o = 27r
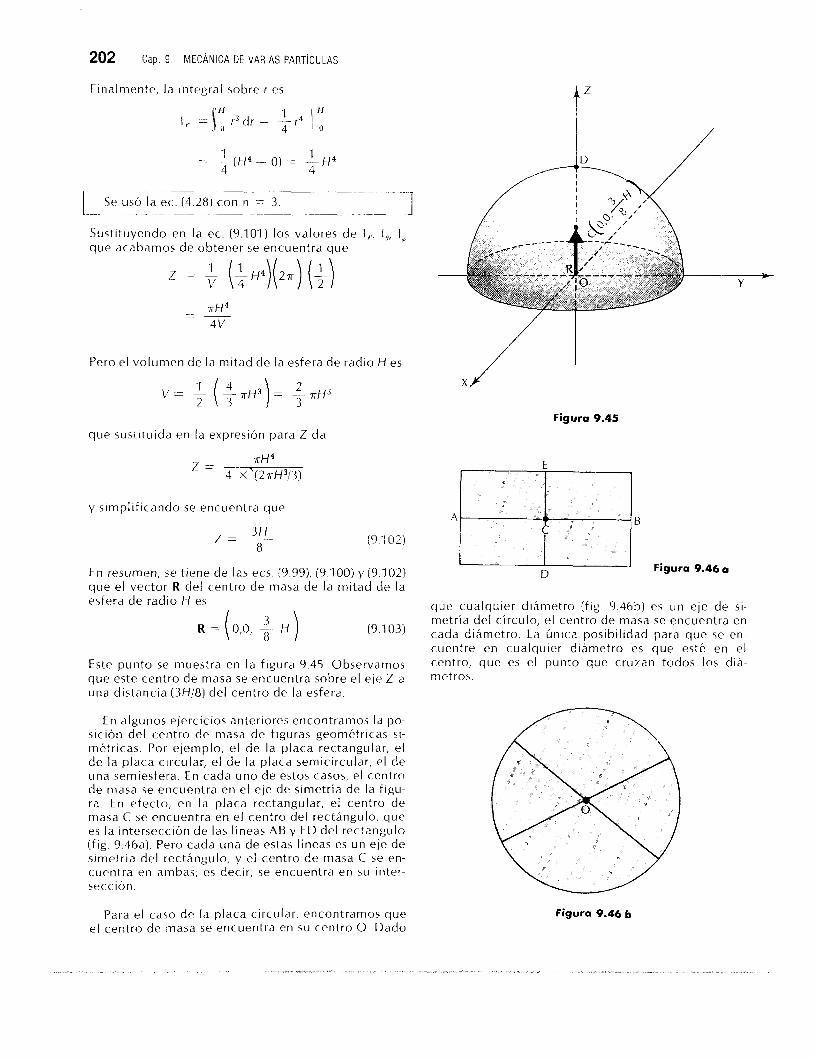
202 Cap. 9 MECANICA DE VARIAS PARTíCULAS
Finalmente, l a Integral sobre r es
I Se usó Ir\ ec. (4.28) con n = 3. 1
Sustituyendo en la ec. (9.101) los valores de I r , I , , I r quc acabamos de obtener se encuentra que
Z = (+ H4)( 2 ~ ) (t)
Pero el volumen de la mitad de la esfera de radio H es
V = 1 ( $-H3)= --rH3 2 3
que sustituida en la expresión para Z da
aH4 4 XT(2wH3/3)
]I=
y simplificando se encuentra que
(9.1 02)
En resumen, se tiene de las ecs. (9.99), (9.100) y (9.102) que el vector R del centro de masa de la mitad de la esfera de radlo H es
R = (",O, H ) (9.1 03)
Este punto se muestra en la figura 9.45. Observamos que este centro de masa se encuentra sobre el eje Z a una distancia (3H/8) del centro de la esfera
En algunos ejercicios anteriores encontramos la po- sición del centro de masa de figuras geométricas si- mtitricas. Por ejemplo, e! de la placa rectangular, el de la placa circular, el de la placa semicircular, el de una semiesfera. En cada uno de estos casos, el centro de masa se encuentra en el eje de simetria de la figu- ra. En efecto, en la placa rectangular, el centro de masa C se encuentra en el centro del rectángulo, que es la intersección de las líneas A B y ED del rectángulo (fig. 9.46a). Pero cada una de estas líneas es un eje de simetría del rectángulo, y el centro de masa C se en- cuentra en ambas; e5 decir, se encuentra en su inter- sección
I
X J Figura 9.45
que cualquier diámetro (fig 9.46b) es un eje de si- metría del círculo, el centro de masa se encuentra en cada diámetro. La únlca posibilidad para que se en- cuentre en cualquier diámetro es que esté en el centro, que es el punto que cruzan todos los diá- metros.
Para el caso de Id placa circular, encontramos que el centro de masa se encuentra en su centro O Dado
Figura 9.46 b
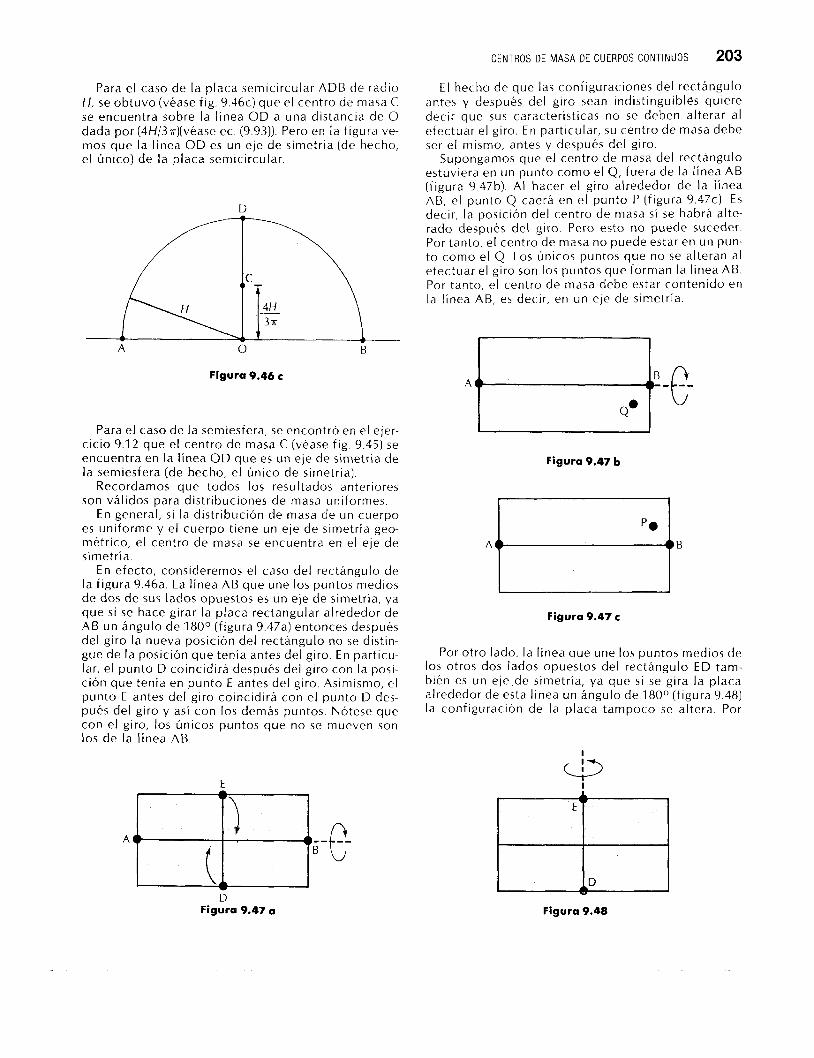
CENTROS DE MASA DE CUERPOS CONTINUOS 203
Para el caso de la placa semicircular ADB de radto H , se obtuvo (véase fig. 9 . 4 6 ~ ) q u e el centro de masa C se encuentra sobre la línea OD a una distancia de O dada por (4H/3~)(véase ec. (9.93)). Pero en la figura ve- mos que la línea OD es un eje de simetría (de hecho, el Único) de la placa semicircular.
Figura 9.46 c
Para el caso de la semiesfera, se encontró en el ejer- cicio 9.12 que el centro de masa C (véase fig. 9.45) se encuentra en la línea OD que es un eje de simetría de la semiesfera (de hecho, el Único de simetría).
Recordamos que todos los resultados anteriores son válidos para distribuciones de masa uniformes.
En general, s i la distribución de masa de un cuerpo es uniforme y el cuerpo tiene un eje de simetría geo- métrico, el centro de masa se encuentra en el eje de simetría.
En efecto, consideremos el caso del rectángulo de la figura 9.46a. La línea AB que une los puntos medios de dos de sus lados opuestos es un eje de simetría, ya que s i se hace girar la placa rectangular alrededor de AB un ángulo de 180° (figura 9.47a) entonces después del giro la nueva posición del rectángulo no se distin- gue de la posición que tenía antes del giro. En particu- lar, el punto D coincidirá después del giro con la posi- ción que tenía en punto E antes del giro. Asimismo, el punto E antes del giro coincidirá con el punto D des- pués del giro y así con los demás puntos. Nótese que con el giro, los únicos puntos que no se mueven son los de la línea AB.
E l hecho de que las configuraciones del rectángulo antes y después del giro sean indistinguibles quiere decir que sus características no se deben alterar al efectuar el giro. En particular, su centro de masa debe ser el mismo, antes y después del giro.
SGpongamos que el centro de masa del rectángulo estuviera en un punto como el Q, fuera de la línea AB (figura 9.47b). AI hacer el giro alrededor de la línea AB, el punto Q caerá en el punto P (figura 9 . 4 7 ~ ) . E s decir, la posición del centro de masa sí se habrá alte- rado después del giro. Pero esto no puede suceder. Por tanto, el centro de masa no puede estar en un pun- to como el Q . Los únicos puntos que no se alteran al efectuar el giro son los puntos que forman la línea AB. Por tanto, el centro de masa debe estar contenido en la línea AB, es decir, en un eje de simetría.
Figura 9.47 b
Figura 9.47 c
Por otro lado. la línea aue une los puntos medios de los otros dos lados opuestos del rectángulo ED tam- bién es un eje,de simetría, ya que si se gira la placa alrededor de esta línea un ángulo de 180° (figura 9.48) la configuración de la placa tampoco se altera. Por
D Figura 9.47 a Figura 9.48

204 Cap. 9. MECANICA DE VARIAS PARTíCULAS
tanto, usando un argumento simllar al arriba dado, el centro de masa también tiene que estar contenido en la línea DE
En consecuencia, vemos que el centro de masa de la placa rectangular tiene que estar al mismo tiempo en la linea A B y en la línea ED. La única manera de que se cumplan estas dos condiciones es que esté en la intersección de ellas, es decir, en su cruce, que es el centro geométrico de la placa.
En general, si una placa tiene más de un eje de simetría, entonces dado que el centro de masa debe estar en cada eje de simetría, re encontrará necesa- riamente en la intersección de estos ejes. En estos ca- sos, es fácil localizar el centro de masa. Por ejemplo, el centro de masa de una estera de masa uniforme- mente distribuida tiene que estar en cualquier diá- metro, ya que cada diámetro es un eje de simetría de la esfera (ibajo qué operación?). En consecuencia, el centro de masa de la esfera se encuentra en la inter- sección de los diámetros, que es el centro de la esfera (véase problema 9.16). Usando argumentos análogos se cor,cluye que, por ejemplo, el centro de masa de una placa circular con masa uniformemente distribui- da debe estar en su centro O (figura 9.4613) y que en una placa semicircular uniforme, su centro de masa debe estar a lo largo de la línea OD ( f igura 9 .46~) . Se deja al lector que haga esta argumentación.
Si uno reconoce en un cuerpo un eje de simetría, se puede simplificar P I cálculo de la posición del centro de masa.
Ejercicio 9.13. Obtenga el centro de masa de un cono recto de radio H y altura L (fig. 9.49). con distri- bución de masa uniforme.
x,' I Figura 9.49
Nos damos cuenta de que el eje O A del cono es un eje de simetría. Por tanto, su centro de masa se en- cuentra sobre este eje. E s decir, en el sistema de coor- denadas escogido en la figura 9.49 el centro de masa se encuentra en e l eje Z. Entonces su vector de posi- ción R tiene coordenadas
R = (O, O, Z) (9.1 04)
Se tiene que determinar Z; es decir, solamente una cantidad.
Escogemos como elemento de volumen un disco paralelo a la base del cono, a una altura z, de radio r y grueso dz (fig. 9.49). Su volumen es
dV = (área del disco) X dz = m 2 d z (9.1 05)
De la ec (9.54) tomamos la componente z
Z = - z d V : S " (9.1 06)
Pero como se ve en la figura 9.49, las cantidades r y z no son independientes. La relación entre estas canti- dades la encontramos como sigue. Los triángulos ASQ y A O K son triángulos semejantes. Por tanto, existe la siguiente relación entre lados homólogos
Pero en la figura vemos que
S() = r, A5 - L - z Ol\ = H, O/\ = L,
que sustituidas en (9.107), nos da
(9.107)
y despejando r
H L r = - (L - z) (9.1 08)
Por tanto, el elemento de volumen dV dado por (9.105) queda como
dV = ÍT -(L - z)'dz HZ L 2
(9.1 09)
Sustituyendo este valor en la ec. (9.106) nos da

CONSERVACION DEL MOMENTO LINEAL 205
Los límites de integración de z van de O a L, para cubrir todo el volumen del cono. A continuación saca- mos fuera de la integral todas aquellas cantidades constantes y desarrollamos el cuadrado que aparece en el integrando, obteniendo Io siguiente
Z = - z(L2 - 2Lz + z2) dr 7rH2 L
VL2 u
cionan entre sí . En la sección 9.2 se encontró la ec (9.23)
(9.1 13)
En esta expresión, P es el momento total del sistema, dado por la suma de los momentos de cada una de las partículas que lo componen (véase ec. (9.16)).
A continuación usamos las ecs. (4.26)-(4.28) p = P1 + PZ + + PN. (9.1 14)
- - $,(& ~ 2 ~ 4 3 4
- 7rH2 L 4
- - 7rH2L2
"- VL2 1 2
12v (9.1 1 O)
Además Fe,,. es la fuerza externa total que actúa sobre el sistema.
Como se estudih en la sección 9.2, la ec. (9.11 3 ) sig- nifica c,de el movimiento del sistema de partículas es tal que su centro de masa en cada instante coincide con el movimiento de un punto en el cual esté con- centrada toda la masa del sistema y sujeto solamente a la acción de la fuerza externa aplicada al sistema.
Supóngase que la fuerza externa F,,,. fuese nula
En este caso se tiene de la ec. (9.113) que
d dt.
- P = O (9 116)
Se usó la ec. (4.28) para cada una de las integrales. tiempo. Esto significa que al transcurrir el tiempo, el E S decir, el momento lineal total P NO depende del
momento es el mismo, o sea, Pero el volumen del cono es (véase problema 9.18)
P = constante (9.11 7 ) I
V = 17rH2L 3
(9.111) Este resultado se puede expresar como
que sustituido en la ec. (9.110) nos da
7rH2L2 12( 7rH2L/3) Z =
y simplificando se obtiene finalmente que
L z= - 4
P-RlNClPlO DE CONSERVACIóN DEL MOMENTO LI- NEAL TOTAL: En un sistema aislado el momen,o lineal total se conserva.
Un sistema sobre el cual no se ejerce ninguna fuer- za externa es un sistema aislado o cerrado.
Hay una diferencia muy importante entre este re- (9.112) sultado y el análogo obtenido para el caso de una sola
partícula (véase sección 9.1). Para el caso de una sola
E l vector de posición R del centro de masa C del el sistema está constituido de dos o más partículas partícula no existen fuerzas internas, mientras que si
sí puede haber fuerzas internas. En consecuencia, si cono es entonces (véase fig. 9.49)
R = (O, O, L/4) un sistema de partículas está aislado, cada una de sus partículas se mueve solamente bajo la acción de fuer- zas internas y, por tanto, al transcurrir el tiempo su configuración relativa cambia (fig. 9.50). E l principio
9.5. CoNsERVAClÓN DEL MOMENTO LINEAL de conservación del momento lineal nos dice que al transcurrir el tiempo, tenga el sistema la configura-
Una vez que aprendimos la manera de encontrar el ción relativa de las partículas que tenga, el vector de centro de masa de diversos cuerpos regresaremos al momento total será siempre el mismo. Así, si en cierto estudio de la dinámica de varios cuerpos que interac- instante el vector es P (fig. 9.50a), entonces al trans-

206
Figura 9.50
( 9 11 8c)
Puede ocurrir que no todas l a \ componentes de ; a fuerza externa se anulen. Si, por ejemplo, l a tamp:) nente (Fx) ,xr . de la fuerza extern2 es cero, entoncec d o la ec (9.11 8a) vemos qc!t. IC! cnrr,rmnente P, es la ~ u e se conserva.
En general, se conservaran aqriel las componentes del momento t o r a l que correspondan a la5 componen- tes de la fuerza externa Q I U C X sean c-ew Naturalmvnte que s i las tres componc':l:es d.; ia iucJrza extern,+ son cero, o sea, todo el vector Fc,l-7, (35 cero, entonces, iodo el vector P se c!,nserva
E n el caso en que la tucr ra externa s e anule, enton-- CCS de Id P C (9.31) V r i i T l O i (JUt'
LIP 11 inicldlmente e l centro de masa está en reposo, tAntonces permanecer& err reposo. Esto significa que las partículas que componen el sistema se podrán mo- v c x una con respecto a la otra, pero la posición del , P I : ~ ~ O cl r nlasa en c.acicl Instante no cambia, siempre
Id i-:i:sm¿. I ( j a r o que s i er1 lugar de que F,,,. sea cero, sola-
i?:entc una (o varias) de sus componentes se anula, en- :once\ l o mrncionado en el párrafo anterior será váli- C-lo wi,lmente para la componente correspondiente t a c t c de !a acc.ierac-ihn A del centro de masa o de su veloc Idad
La utilización del teorema de conservación del mo- mento permi te encontrar características del movi- miento de algunos de l o s cuerpos de un sistema s i n t r - ner q u r c,onocrr las f u e r r a s internas que se eierct"n en detal le. t sto implica definir e l sistema de manera ade- cuada para que no h a b a fuerza externa. En los siguien- tes C'IPrciCIo'; SC' l l y d . m < ' S t o
Ejercicio 9.14. Un nlño de masa 40 kg está encima de o n t r i c i c l o de masa 25 k g Estando el triciclo con el n i ~ o r n wposo, e l niño brinca horizontalmente con I I ~ J vt>locldad de 2 mjs. Describa el movimiento que rc>cjlizc3 el t r i c ic lo
l jeflnamos a nuestro sistema consistente del niño y el triciclo Cada uno de l o s cuerpos experimenta su peso (J\.;c es ejercido por la Tierra. Por tanto, los pesos dc ic:> cuerpo> son tuerzds externas a l sistema. Ahora bien, cada uno de los pesos es una fuerza vertical En :.i:>giP(.iretlcia, verticalmente nuestro sistema sí expe- rIrtne!-!t,? un3 fuerza externa. Sin embargo, horizontai- ; w r ; ~ c % uinguno de !os cuerpos experimenta fuerza algu- :::I Pnr tanto, horizontalmente no hay fuerza externa
Dci principio de conservación de! momento pode- r n c ~ decir entonces que la componente horizontal del mo~mc~r?to dc. nuestro sistema se conserva
Pho r i zon ra~ x constante (9.1 20)
p o r !o que e l momento horironta! in1c:I del sistema. que= c's la suma d r estas cdntidader, P
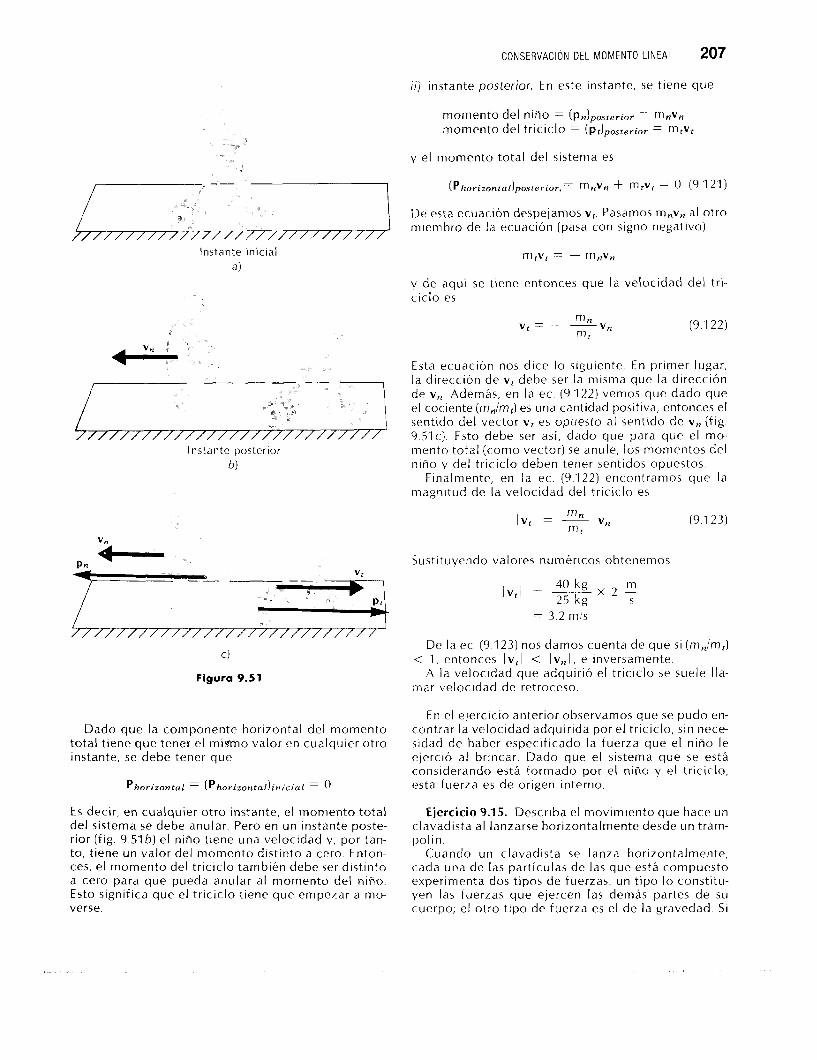
CONSERVACION DEL MOMENTO LINEAL 207
i i ) instante posterior. En este instante, se tiene que
momento del niño (Pn)posterior - m,v, momento del tr iciclo = (pJposterior = mtvt
-
y el momento total de! sistema es
"
Instante inicial a l
Instante posterior b)
Figura 9.51
Dado que la componente horizontal del momento total t iene que tener el mirmo valor en cualquier otro instante, se debe tener que
Es decir, en cualquier otro instante, el momento total del sistema se debe anular. Pero en un instante poste- rior (fig. 9.51b) el niño tiene una velocidad y, por tan- to, tiene un valor del momento distinto a cero. Enton- ces, el momento del tr lciclo también debe ser distinto a cero para que pueda anular al momento del niño. Esto significa que el triciclo tiene que empezar a mo- verse.
(Phorizonral)posterior .= m,,v, + mrvt 0 i9.121)
De esta ecuación despejamos vt. Pasamos m,vn al otro miembro de !a ecuación (pasa con signo negativo)
m,v, = - m,v,
y de aquí se tiene entonces que la velocidad del tri- ciclo es
Esta ecuación nos dice lo siguiente. En primer lugar, la dirección de vt debe ser la misma que la dirección de v,. Además, en la ec. (9.122) vemos que dado que el cociente (rnirn,) es una cantidad positiva, entonces el sentido del vector vt es opuesto a! sentido de v, (fig. 9 . 5 1 ~ ) . Esto debe ser así, dado que para que el mo- mento total (como vector) se anule, los momentos del nlño y del triciclo deben tener sentidos opuestos.
Finalmente, en la ec. (9.122) encontramos que la magnltud de la velocidad del triciclo es
Sustituyendo valores numéricos obtenemos
= 3.2 mis
(9.1 23)
De la ec (9.123) nos damos cuenta de que si (rnirn,)
A la velocidad que adquirió el tr iciclo se suele Ila- < I, entonces I v t l < IvJ, e inversamente.
mar velocidad de retroceso.
En el ejercicio anterior observamos que se pudo en- contrar la velocidad adquirida por el triciclo, sin nece- sldad de haber especificado la fuerza que el niño le ejerció al brincar. Dado que el sistema que se está considerando está formado por el niño y el tr iciclo, esta fuerza es de origen interno.
Ejercicio 9.15. Describa el movimiento que hace un clavadista al lanzarse horizontalmente desde un tram- polín.
Cuando un clavadista se lanza horizontalmente, cada una de las partículas de las que está compuesto experimenta dos tipos de fuerzas: un tipo lo constitu- yen las fuerzas que ejercen las demás partes de su cuerpo; el otro tipo de fuerza es el de la gravedad Si
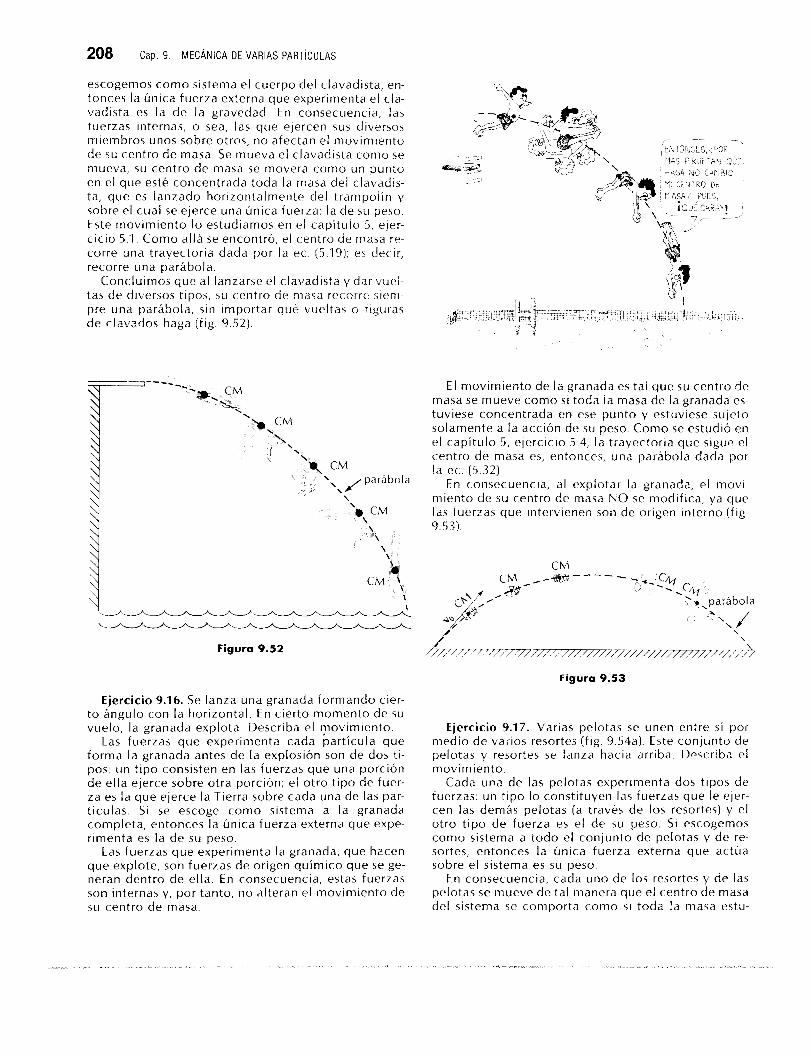
208 Cap. 9. MECANICA DE VARIAS PARTíCULAS
escogemos como sistema el cuerpo del clavadista, en- tonces la única fuerza externa que experimenta el cla- vadista es la de la gravedad. En consecuencia, las tuerzas internas, o sea, las que ejercen sus di\lersc>s miembros unos sobre otros, no afectan el movimlento de su centro cle masa. Se mueva el clavadista como se mueva, su centro de masa se moverá corno un punto en e l que est6 concentrada toda la masa del clavadis- ta, que es lanzado horizontalmente del trampolín y sobre el cual se ejerce una única fuerza: la de su peso. Este movimiento lo estudiamos en el capítulo 5, ejer- cicio 5.1. Como al lá se encontró, el centro de masa re- corre una trayectoria dada por la ec (5.19); es decir, recorre una parábola.
Concluimos que al lanzarse el clavadista y dar v u e - tas de drversos tiDos, su centro de niasa recorre siem-
,- "~ ~- ~ ~~ ~ -- , tluT;';CLS,:?Dk;
'YA; Pli(tJErACj O G E HAGA rUC C.li.1Pl3 ;<, C i t u T R O DE
i "
'a C M \ \ \ \
E l movimiento de la granada es tal que su centro de masa se mueve como s i toda la masa de la granada es- tuviese concentrada en ese punto y estuviese sujeto solamente a la acción de su peso. Como se estudio en el capítulo 5, ejercicio 5.4, la trayectoria que sigue el centro de masa es, entonces. una parábola dada por la ec (5.32).
En consecuencia, al explotar id granada, el movi- miento de. su centro de masa NO se modifica, ya que las fuerzas que intervienen son de origen interno (fig. 9.533.
\1 \
Ejercicio 9.16. Se lanza una granada formando cier- to angulo con la horizontal. En cierto momento de su vuelo, la granada explota. Describa el movimiento.
Las fuerzas que experimenta cada partícula que forma la granada antes de la explosión son de dos ti- pos: un tipo consisten en las fuerzas que una porción de ella ejerce sobre otra porción; el otro tipo de fuer- za es la que ejerce la Tierra sobre cada una de las par- tículas. Si se escoge como sistema a la granada completa, entonces la única fuerza externa que expe- rimenta es la de s u peso.
Las fuerzas que experimenta la granada, que hscen que explote, son fuerzas de origen químico que se ge- neran dentro de ella. En consecuencia, estas fuerzas son internas y, por tanto, no alteran el movimiento de su centro de masa.
Ejercicio 9.17. Varias pelotas se unen entre s i por medio de varios resortes (fig. 9.54a). Este conjunto de pelotas y resortes se lanza hacia arriba. Describa el movimiento.
Cada una de las pelotas experimenta dos tipos de tuerzas: un tipo lo constituyen las tuerzas que le ejer- cen las demás pelotas (a través de los resortes) y el otro t ipo de fuerza es el de su peso. S i escogemos como sistema a todo el conjunto de pelotas y de re- sortes, entonces la única fuerza externa que actúa sobre el sistema es su peso.
En consecuencia, cada uno de los resortes y de las pelotas se mueve de tal manera que el centro de masa del sistema se comporta como S I toda la masa estu-
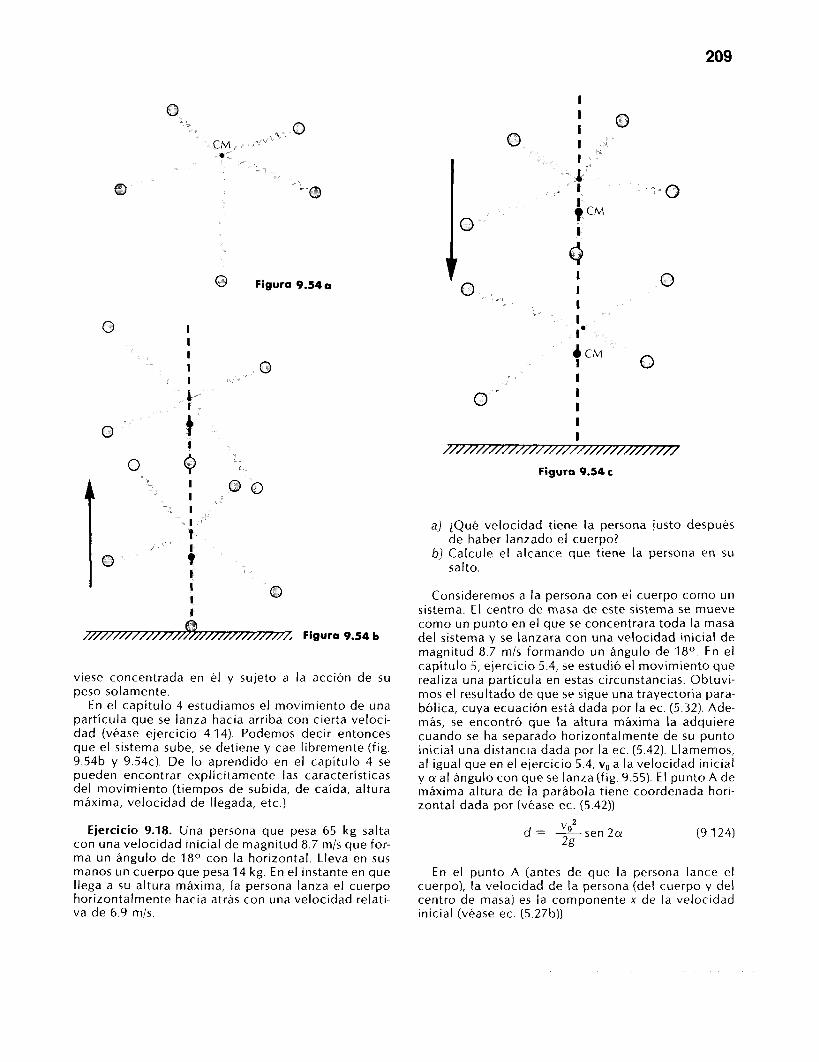
209
0 Figura 9.54a
I I 0 0 I I t
1 I O t
Figura 9.54 b
viese concentrada en éI y sujeto a la acción de su peso solamente.
En el capítulo 4 estudiamos el movimiento de una partícula que se lanza hacia arriba con cierta veloci- dad (véase ejercicio 4.14). Podemos decir entonces que el sistema sube, se detiene y cae libremente (fig. 9.54b y 9.54~). De lo aprendido en el capítulo 4 se pueden encontrar explícitamente las características del movimiento (tiempos de subida, de caída, altura máxima, velocidad de llegada, etc.).
Ejercicio 9.18. Una persona que pesa 65 k g salta con una velocidad inicial de magnitud 8.7 mis que for- ma un ángulo de 18O con la horizontal. Lleva en sus manos un cuerpo que pesa 14 kg. En el instante en que llega a su altura máxima, la persona lanza el cuerpo horizontalmente hacia atrás con una velocidad relati- va de 6.9 mis.
O
r
I
I
o
O
I I
///////////////////////////////////
Figura 9.54 c
a) iQué velocidad tiene la persona justo después
b] Calcule el alcance que tiene la persona en su de haber lanzado el cuerpo?
salto.
Consideremos a la persona con e¡ cuerpo como un sistema. E l centro de masa de este sistema se mueve como un punto en el que se concentrara toda la masa del sistema y se lanzara con una velocidad inicial de magnitud 8.7 mis formando un ángulo de 18O. En el capítulo 5, ejercicio 5.4, se estudió el movimiento que realiza una partícula en estas circunstancias. Obtuvi- mos el resultado de que se sigue una trayectoria para- bólica, cuya ecuación está dada por la ec. (5.32). Ade- más, se encontró que la altura máxima la adquiere cuando se ha separado horizontalmente de su punto inicial una distancia dada por la ec. (5.42). Llamemos, al igual que en el ejercicio 5.4, v,, a la velocidad inicial y (Y al ángulo con que se lanza (fig. 9.55). E l punto A de máxima altura de la parábola tiene coordenada hori- zontal dada por (v6ase ec. (5.42))
( j= __ '0' sen 2 a 2g
(9.1 24)
En el punto A (antes de que la persona lance el cuerpo), la velocidad de la persona (del cuerpo y del centro de masa) es la componente x de la velocidad inicial (véase ec. (5.27b3)
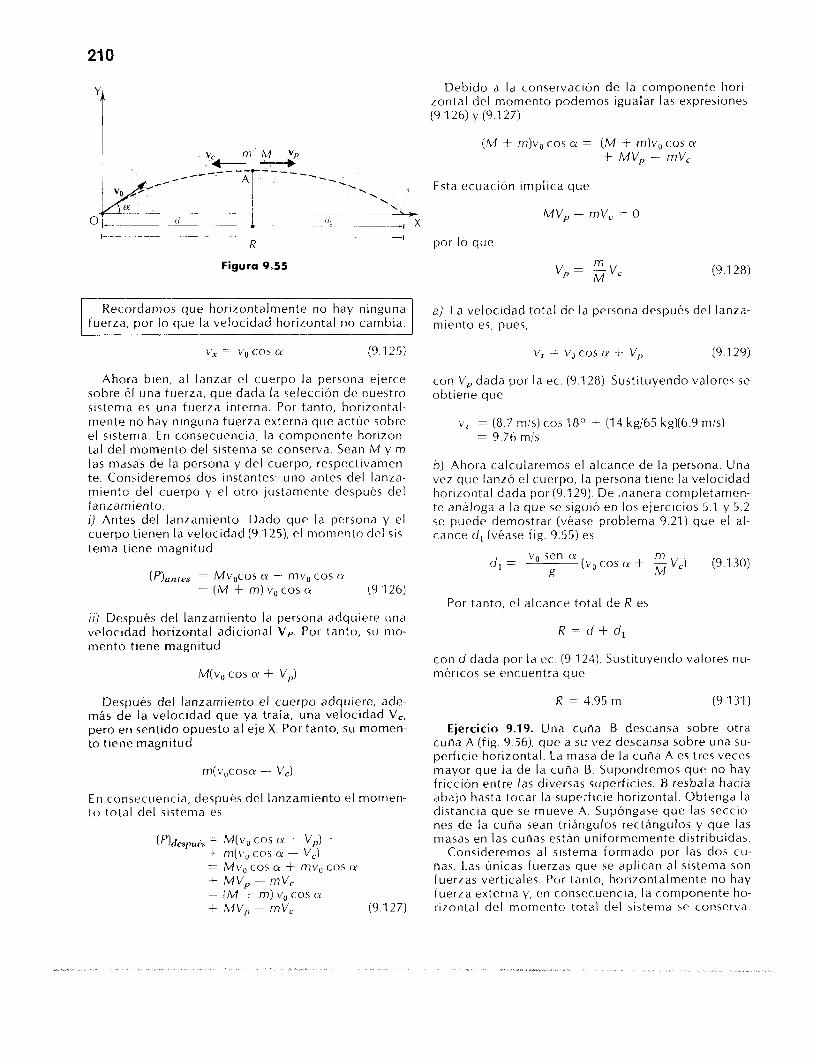
21 o Debido a la conservación de la componente hori-
zontal del momento podemos igualar las expresiones (9 126) y (9.1 27)
Recordamos que horizontalmente no hay ninguna que la velocidad horizontal no cambia.
-
vx = vo cos N (9.1 25)
Ahora bien, al lanzar el cuerpo l a persona ejerce sobre éI una fuerza, que dada la selección de nuestro sistema es una fuerza interna. Por tanto, horizontal- mente no hay ninguna fuerza externa que actúe sobre el sistema. En consecuencia, la componente horizon- tal del momento del sistema se conserva. Sean M y m las masas de la persona y del cuerpo, respectivamen- te. Consideremos dos instantes: uno antes del lanza- miento del cuerpo y el otro justamente después del lanzamiento. i) Antes del lanzamiento. Dado que la persona y el cuerpo tienen la velocidad (9.125), el momento del sis- tema tiene magnitud
(P),,,,, = Mv,cos 01 + mv, cos 01
= (M + m) v, cos LY (9.1 26)
i i ) Después del lanzamiento la persona adquiere una velocidad horizontal adicional V p . Por tanto, su mo- mento t iene magnitud
Miv, cos O1 t VP)
Después del lanzamiento el cuerpo adquiere, ade- más de la velocidad que ya traía, una velocidad V,, pero en sentido opuesto al eje X. Po r tanto, su momen- to tiene magnitud
m(v,cosa - V,)
En consecuencia, después del lanzamiento el momen- to to ta l de l sistema es
(P)tles,,"i.s = J w v , cos a + Vp) + + m(v, cos cy - V,) = M v , cos CY + mv, C O S CY + M V , - mV, = (M + m) v,, cos N + MV,, - mV, (9.1 27)
a) La velocidad total de la persona después del lanra- miento es, pues,
vf = vu cos N + v,, (9.1 29)
con Vp dada por ¡a ec. (9.128) Sustituyendo valores se obtiene que
v t = (8.7 m!s) cos 1 8 O + (1 4 kg/65 kg)(6.9 mis) = 9.76 mis
h) Ahora calcularemos el alcance de la persona. Una bez que lanzó el cuerpo, la persona tiene l a velocidad horirontal dada por (9.129). De .nanera completamen- te an6loga a la que se siguió en los ejercicios 5.1 y 5.2 se puede demostrar (véase problema 9.21) que el al- cance dl (véase fig. 9.55) es
dl = vu sen 01
g (v, cos cy + VC)
m (9.1 30)
Por tanto, e l alcance total de R es
R = d + d l
con d dada por la ec. (9.1 24). Sustituyendo valores nu- méricos se encuentra que
R = 4.95 m (9.1 31 )
Ejercicio 9.19. Una cuña B descansa sobre otra cuña A (fig. 9.56), que a s u vez descansa sobre una su- perficie horizontal. La masa de la cuña A es tres veces mayor que la de la cuña B. Supondremos que no hay fricción entre las diversas superficies. B resbala hacia abajo hasta tocar la supeyficie horizontal. Obtenga la distancia que se mueve A. Supóngase que las seccio- nes de l a cuña sean triángulos rectángulos y que las masas en las cuñas están uniformemente distribuidas.
Consideremos al sistema formado por las dos cu- ñas. Las únicas fuerzas que se aplican al sistema son fuerzas verticales. Por tanto, horizontalmente no hay fuerza externa y, en consecuencia, la componente ho- rizontal del momento total del sistema se conserva.
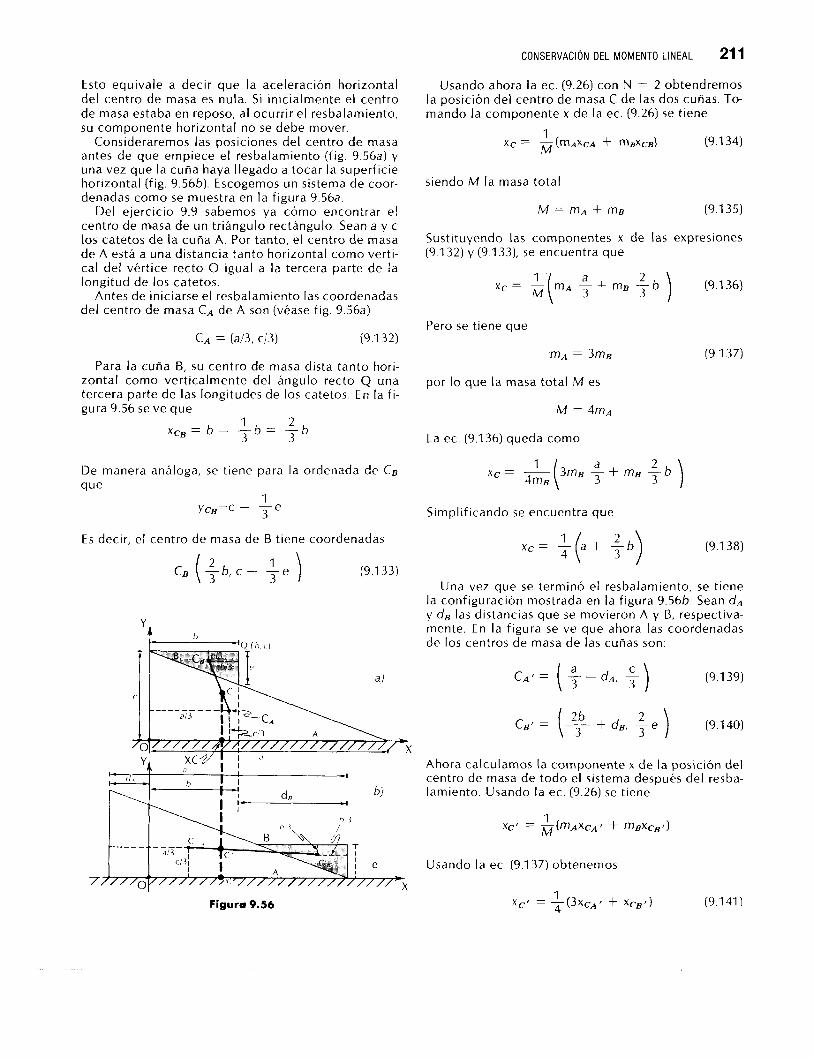
CONSERVACI~N DEL MOMENTO LINEAL 21 1
Esto equivale a decir que la aceleración horizontal del centro de masa es nula. Si inicialmente el centro de masa estaba en reposo, al ocurrir el resbalamiento, su componente horizontal no se debe mover.
Consideraremos las posiciones del centro de masa antes de que empiece el resbalamiento (fig. 9.56a) y una vez que la cuña haya llegado a tocar la superficie horizontal (fig. 9.56b). Escogemos un sistema de coor- denadas como se muestra en la figura 9.56a.
Del ejercicio 9.9 sabemos ya cómo encontrar e! centro de masa de un triángulo rectángulo. Sean a y c los catetos de la cuña A. Por tanto, el centro de masa de A está a una distancia tanto horizontal como verti- cal del vértice recto O igual a la tercera parte de la longitud de los catetos.
Antes de iniciarse el resbalamiento las coordenadas del centro de masa C A de A son (véase fig. 9.56a)
C A = (a/3, ~ / 3 ) (9.1 32)
Para la cuña B, su centro de masa dista tanto hori- zontal como verticalmente del ángulo recto Q una tercera parte de las longitudes de los catetos. En la fi- gura 9.56 se ve que
1 2 3 3
xc,=b- " b = "b
De manera análoga, se tiene para la ordenada de C B
que 1 3 ycB=c - - e
E s decir, el centro de masa de B tiene coordenadas
Usando ahora la ec. (9.26) con N = 2 obtendremos la posición del centro de masa C de las dos cuñas. To- mando la componente x de l a ec. (9.26) se tiene
"
xc = M ( m A ~ C ~ + mBxcB) (9.1 34) I
siendo M la masa total
Sustituyendo las componentes x de las expresiones (9.1 32) y (9.1 33), se encuentra que
Pero se tiene que
'mA 3mB (9.1 37)
por lo que la masa total M es
M = 4mA
La ec. (9.136) queda como
Simplificando se encuentra que
x c = '(.+ 4 fb ) (9.1 38)
(9.1 33) Una vez que se terminó el resbalamiento, se tiene
la configuración mostrada en la figura 9.56b. Sean dA y dB las distancias que se movieron A y B, respectiva- mente. En la figura se ve que ahora las coordenadas de los centros de masa de las cuñas son:
(9.1 39)
CB' = + dB, - e ) (9.140) 3
Ahora calculamos la componente x de la posición del centro de masa de todo el sistema después del resba- lamiento. Usando la ec. (9.26) se tiene
Usando la ec. (9.1 37) obtenemos
(9.1 41 1

212 cap . 9. MECANICA DE VARIAS PART~CULAS
y sustituyendo las componentes x de las expresiones (9.1 39) y (9.140) nos da
4 (9.1 42)
Pero de lo arriba discutido sabemos que la compo- nente x del centro de masa NO se mueve, por lo que
xc = X C '
Sustituyenao los valores dados por las ecs. (9.1 38) y (9.1 42) se tiene
y de esta ecuación se concluye que
- 3 d ~ + dB = 0
o sea,
dB = 3d,4 (9.1 43)
Por otro lado, en la f igura 9.566 se ve que
d A + b + d B = a
por lo que
d A + d B = a - b (9.1 44)
Sustituyendo dB dado por la ec. (9.143) en la ec. (9.144) se obtiene
4dA = a - b
por lo que
A = (a - b)/4 (9.1 45)
Ésta es la distancia que se mueve la cuña A . Vemos que se pudo obtener esta cantidad sin tener
que conocer la fuerza que ejerce E3 sobre A. Esta fuer- za es de origen interno y, por tanto, no altera la posi- ción horizontal del centro de masa.
De lo que hemos aprendido hasta ahora nos damos cuenta de que cuando en los capítulos anteriores hablábamos de cuerpos extendidos, realmente a lo que implícitamente nos estábamos refiriendo era a un punto situado en el centro de masa de dicho cuerpo en el que se concentraba la masa del cuerpo. Para es- tos cuerpos extendidos se trabajaba de hecho con la ec. (9.31).
9.6. COLISIONES
En la sección anterior obtuvimos el resultado de que en un sistema aislado el momento total se conser- va. Asimismo, en el capítulo 8 se encontró que para sistemas aislados la energía total también se conser- va. En esta sección aplicaremos estos principios de conservación al caso de las colisiones entre parti- culas.
Consideraremos por simplicidad el caso de coli- siones en una dimensión. Supongamos que dos par- tículas, la 1 y la 2, se pueden mover solamente a lo lar- go de una línea recta (fig. 9.57a). Sean m, y m2 las rnasas de las partículas, respectivamente. Además, sean v, y v2 las velocidades con que inciden las partí- culas una contra la otra. Supondremos que estos son los valores de las veiocidades cuando las partículas se encuentran muy separadas una de la otra. Esto signifi- ca que, en este instante, la fuerza que una partícula ejerce sobre la otra es despreciable. Por tanto, en esta configuracibn la energía potencial entre las partículas la podemos tomar como nula.
€ 5 importante aclarar que se está suponiendo que las partículas ejercen una fuerza una sobre la otra, es decir, están interaccionando una con la otra. Sin em- bargo, s i las partículas estan suficientemente alejadas una de la otra, entonces esta fuerza es muy pequena; a medida que esten más alejadas, la fuerza será me- nor. Una vez que se acercarr, entonces, la fuerza ya no se podrá despreciar. Para aplicar de modo convenien- te los principios de conservación sin tener que decir nada acerca de la fuerza entre las partículas, se consi- derarán configuraciones talcs que la fuerza sed despreciable Fisicamente esto ocurre solamente cuando las partículas están suficientemente sepa-
~ "" ~- -
i.a configuración de la figura 9.57a es la que tienen Ids partículas antes de chocar.
Ahora bien, las partículas se acercan una a la otra y empiezan a ejercerse una fuerza mutua (fig. 9.57b). En esta Configuración esta fuerza no se puede despre- ciar Se dice que las partículas están interaccionando entre s í .
Después de clerto tiempo, puede ocurrir que las partículas "reboten", es decir, se regresen ( f i g 9 .57~) . En general, las partículas tendrán, después de la coli- sión, velocidades vl' y v2' distintas a las velocidades v1 y v2 con que incidieron.
A resulta5 de la interacción, también pueden ocu- rrir otras cosas. Una de ellas es que las partículas se peguen una a la otra, como sucedería con dos bolas de plastilina, con el resultado de que después de la colisión solamente se tiene una partícula (fig. 9.i7d).
Otra cosa que puede suceder es que, como resulta- do de la colisión, las partículas modifiquen sus masas. Esto sucedería, por ejemplo, s i una partícula es rígida
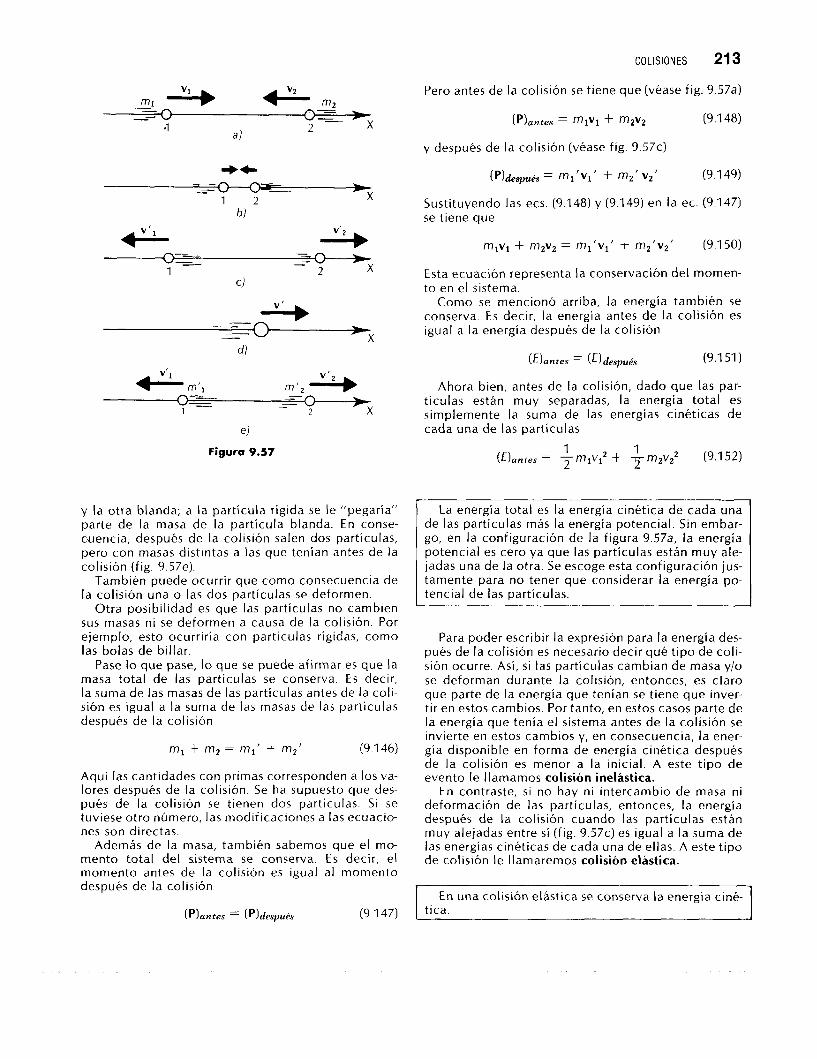
- m1 + m,
al
- - - - - - - 4 2 X
-b+ ” L - -
1 2 -X bl
4 - + - - - - L
* 1 2 X
- - Cl
~“ - ~- +X -
4
& m‘, - m‘ , ” - .~ - - *
2 X - -
1 ~-
el Figura 9.57
y la otra blanda; a la partícula rígida se le “pegaría” parte de la masa de la partícula blanda. En conse- cuencia, después de la colisión salen dos partículas, pero con masas distintas a las que tenían antes de la colisión (fig. 9.57e).
También puede ocurrir que como consecuencia de la colisión una o las dos partículas se deformen.
Otra posibil idad es que las partículas no cambien sus masas ni se deformen a causa de la colisión. Por ejemplo, esto ocurriría con partículas rígidas, como las bolas de billar.
Pase lo que pase, lo que se puede afirmar es que la masa total de las partículas se conserva. E s decir, la suma de las masas de las partículas antes de la coli- sión es igual a la suma de las masas de las partículas después de la colisión
m, f m2 = m,’ + m2’ (9.1 46)
Aquí las cantidades con primas corresponden a los va- lores después de la colisión. Se ha supuesto que des- pués de la colisión se tienen dos partículas. Si se tuviese otro número, las modificaciones a las ecuacio- nes son directas.
Además de la masa, también sabemos que el mo- mento total del sistema se conserva. E s decir, el momento antes de la colisión es igual al momento después de la colisión
(P)an tes = (Pldespués (9.1 47)
COLISIONES 21 3
Pero antes de la colisión se tiene que (véase fig. 9.57a)
(P)antf?s = m l v l + m2v2 (9.1 48)
y después de la colisión (véase f ig. 9.57~)
(P)desputS = ml‘vl’ + m2‘ v2’ (9.1 49)
Sustituyendo las ecs. (9.148) y (9.149) en la ec. (9.147) se tiene que
mlvl + m2v2 = ml’vl’ + m2’v2’ (9.150)
Esta ecuación representa la conservación del momen- to en el sistema.
Como se mencionó arriba, la energía también se conserva. Es decir, la energía antes de la colisión es igual a la energía después de la colisión
(Elantes (Qdespuds (9.1 51)
Ahora bien, antes de la colisión, dado que las par- tículas están muy separadas, la energía total es simplemente la suma de las energías cinéticas de cada una de las partículas
1 1 2 2 (€)ante, = -mlv12 + - r~12v2’ (9.1 5 2 )
La energía total es la energía cinética de cada una de las partículas más la energía potencial. Sin embar- go, en la configuración de la figura 9.57a, la energía potencial es cero ya que las partículas están muy ale- jadas una de la otra. Se escoge esta configuración jus- tamente para no tener que considerar la energía po- tencial de las partículas.
Para poder escribir la expresión para la energía des- pués de la colisión es necesario decir qué tipo de coli- sión ocurre. Así, s i las partículas cambian de masa y/o se deforman durante la colisión, entonces, es claro que parte de la energía que tenían se tiene que inver- tir en estos cambios. Por tanto, en estos casos parte de la energía que tenía el sistema antes de la colisión se invierte en estos cambios y, en consecuencia, la ener- gía disponible en forma de energía cinética después de la colisión es menor a la inicial. A este t ipo de evento le llamamos colisión inelástica.
En contraste, si no hay ni intercambio de masa ni deformación de las partículas, entonces, la energía después de la colisión cuando las partículas están muy alejadas entre sí ( f ig . 9 .57~) es igual a la suma de las energías cinéticas de cada una de ellas. A este tipo de colisión le llamaremos colisión elástica.
I En una colisión elástica se conserva la energía ciné- tica. 1

21 4 Cap. 9. MECANICA DE VARIAS PART~CULAS
En el caso de colisiones elásticas se tiene que
m,’ = m, y m2’ = m2 (9.1 53)
La energía después de la colisión es, entonces,
Sustituyendo las ecs. (9.152) y (9.154) en la ec. (9.151) se tiene
1 -m,v,2 + -m2v:
1 2 2
- 1 1 - Tml(v , ’ )2 + ~ m 2 ( v 2 ’ I 2 (9.1 55)
vo); luego pasamos m 2 v Z 2 al miembro derecho (pasa con signo negativo)
mlv12 - m,(v,’)2 = m2(v2’)2 - m 2 v z Z
Factorizamos m, en el miembro izquierdo y m2 en el derecho
m,[\/? - ( ~ 1 ’ ) ~ l - m21(v2’)2 - vz21 -
Nos damos cuenta de que cada uno de los paréntesis en cada miembro es una diferencia de cuadrados. Por tanto, esta última ecuación se puede escribir como
Nos damos cuenta de que con la ec. (9.1 53), la ecua- Por álgebra se sabe que ción de conservación de la masa total (9.146) se satis- face idénticamente. a2 - b2 = (a + b)(a - b) (9.1 58)
E l problema que se plantea ahora es el siguiente. Para colisiones elásticas, se dan las masas m, y m, de las partículas; también se dan las velocidades de inci- dencia v1 y v2. Se trata de encontrar las velocidades
ml(vl + v,’)(v, - V I ’ ) = m2(v2’ + vz)(vz’ - va) (9.1 59)
v,’ y v2’ que tienen las partículas después de la coli- sión. Para el caso del movimiento en una dimensión y usando la ec, (9,157) en el lado derecho de la última encontraremos estas incógnitas usando solamente las nos da ecs. de conservación (9.1 50), (9.1 53) y (9.1 55). En vista de que la ec. (9.150) es una ecuación vectorial, toma- remos sus componentes en algún sistema de coorde- nadas. Como estamos considerando colisiones en una dimensión, bastará t0,mar Componentes de (9.150) a 10 Dividiendo ambos miembros de esta ecuación entre largo de un S O ~ O eje. Este 1 0 escogemos como el eje X ml(vl + vl’) a lo largo de la línea de movimiento (fig. 9.57). La componente x de la ec. (9.1 50) es v1 - v,’ = v2’ - v,
m d v , + vl’)(vl - vl’) = m,(v, + vl’)(v2’ - v,)
mlvl -- m2v2 = - m,v,’ + m 2 v 2 ’ (9.156)
Se han supuesto los sentidos de los vectores de ve- locidad de la forma mostrada en las figuras 9.57a y c.
I_-
Ahora tenemos dos ecuaciones, (9.155) y (9.1 56) para dos incógnitas: vl’ y v2 ‘ . A continuación las re- solveremos.
De la ec. (9.156) pasamos el término mlvl‘ al miembro izquierdo (pasa con signo positivo); también pasamos m 2 v 2 al miembro derecho (pasa con signo po- sitivo)
mlvl + mlvl‘ = m2v2 + m 2 v 2 ’
Ahora factorizamos m, en el miembro izquierdo y fac- torizamos m2 en el miembro derecho
ml(v, + v,‘) = mz(vz + v2’ ) (9.1 57)
Despejamos v2 ’ pasando va al otro miembro (pasa con signo positivo)
v2 ’ = v, + va - vl’ (9.1 60)
E l siguiente paso consiste en sustituir (9.160) en la ec. (9.1 56)
mlvl - m 2 v 2 = - mlvl’ + m2(v1 + vz - vl ‘ )
y desarrollando el paréntesis en el miembro derecho
mlvl - m 2 v 2 = - mlvl’ + m2vl + mZvz - mZvl’ = m2v1 + m 2 v 2 - (m, + m2)vl’
Aquí se factorizó v,’ en el miembro derecho. Ahora despejaremos v,’. Para ello reescribimos esta ecua- ción como
Multiplicamos ahora la ec. (9.155) por 2 y pasamos (m, + m,)v,’ = mzvl + m 2 v 2 - mlvl + m 2 v 2 m,(v,’)2 al miembro izquierdo (pasa con signo negati- = 2m,v2 + (m, - m&,
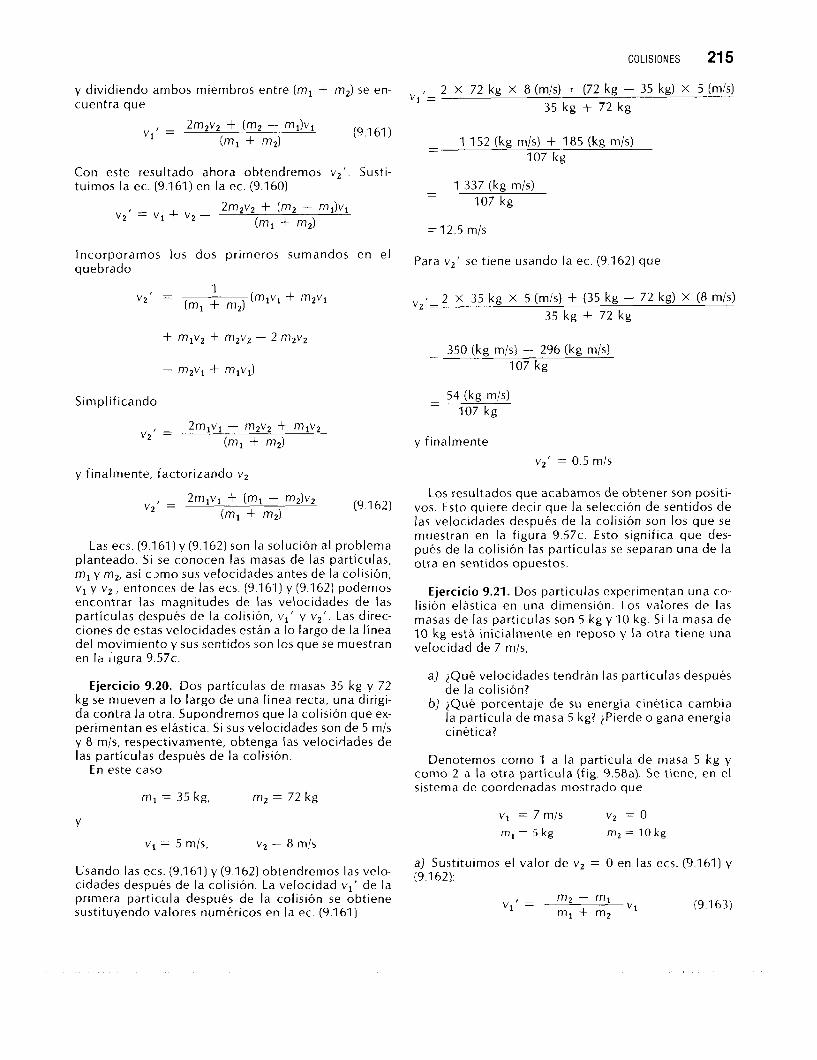
COLISIONES 21 5
y dividiendo ambos miembros entre (m, + m,) se en- cuentra que
Con este resultado ahora obtendremos v,'. tuimos la ec. (9.161) en la ec. (9.160)
Incorporamos los dos primeros sumandos quebrado
1 v,' = (mlv, + mzvl (m, + m,)
+ mlvZ + m2v2 - 2 m,v,
Simplificando
v,' = 2m,v, - m2v2 + mlvz (m1 + m,)
y finalmente, factorizando v,
Susti-
en el
(9.1 62)
Las ecs. (9.161) y (9.162) son la solución al problema planteado. S i se conocen las masas de las partículas, m, y m,, así c3mo sus velocidades antes de la colisión, v, y v 2 , entonces de las ecs. (9.161) y (9.162) podemos encontrar las magnitudes de las velocidades de las partículas después de la colisión, v i ' y v,'. Las direc- ciones de estas velocidades están a lo largo de la línea del movimiento y sus sentidos son los que se muestran en l a ;Igura 9 . 5 7 ~ .
Ejercicio 9.20. Dos partículas de masas 35 kg y 72 kg se mueven a lo largo de una línea recta, una dirigi- da contra la otra. Supondremos que la colisión que ex- perimentan es elástica. Si sus velocidades son de 5 mis y 8 mis, respectivamente, obtenga las velocidades de las partículas después de la colisión.
En este caso
m, = 35 kg, m2 = 72 kg
Y
v, = 5 mis, v2 = 8 mis
Usando las ecs. (9.161) y (9.162) obtendremos las velo- cidades después de la colisión. La velocidad v,' de la primera partícula después de la colisión se obtiene sustituyendo valores numéricos en la ec. (9.161)
2 x 72 kg X 8 (mis) + (72 kg - 35 kg) X 5 (mis) 35 k g + 72 k g
V I ' =
- - 1 152 (kg mis) + 185 (kg mis) 107 kg
- 1 337 (kg mis) -
107 kg
= 12.5 mis
Para v,' se tiene usando la ec. (9.162) que
v, = ' 2 X 35 kg x 5 (mis) + (35 kg - 72 kg) X (8 mis) 35 k g + 72 kg
- - 350 (kg mis) - 296 (kg mis) 107 kg
y finalmente v,' = 0.5 mis
Los resultados que acabamos de obtener son positi- vos. Esto quiere decir que la selección de sentidos de las velocidades después de la colisión son los que se muestran en la f igura 9.57~. Esto significa que des- pués de la colisión las partículas se separan una de la otra en sentidos opuestos.
Ejercicio 9.21. Dos partículas experimentan una co- lisión elástica en una dimensión. Los valores de las masas de las partículas son 5 kg y 10 kg. Si la masa de 10 kg está inicialmente en reposo y la otra tiene una velocidad de 7 mis,
a) iQué velocidades tendrán las partículas después de la colisión?
b) iQué porcentaje de su energía cinética cambia la partícula de masa 5 kg? iPierde o gana energía cinética?
Denotemos como 1 a la partícula de masa 5 kg y como 2 a la otra partícula (fig. 9.58a). Se tiene, en el sistema de coordenadas mostrado que
v, = 7 mis v, = o m, = 5 kg m2 10 kg
a) Sustituimos el valor de v, = O en las ecs. (9.161) y (9.1 62):
(9.1 63)

21 6
Figuro 9.58 o
y ahora sustituimos los valores numéricos
V I ' = 10 kg - 5 kg x 7- m 10 kg + 5 kg S
= 2.33 mls
Para la partícula 2 se tiene que
"1 2m1
"2' = m1 + m2
- - x kg X 7"- = 4.67 mis m 15 kg S
(9.1 64)
b) La energía cinética inicial K, de la partícula 1 es "
K1 = -rnlv12 2 I
= - X 5 kg X (7 1 2
= 122.5 joules
Aquí se usó la ec. (8.24). Para la energía cinética final K,' de la partícula 1 se tiene que
1 K,' = Trn,vl'
" = - X 5 kg X (2.33 m/sj2 I
2
= 13.57 J
E l cambio de energía cinética de la partícula 1 es en- tonces
(AK), = K,' K, = 13.57 J - 122.5 J = - 108.93 J
E l porcentaje del cambio de la energía cinética de ¡a partícula 1 es
= - 0.889 X 100%
= - 88.9%
De los resultados que acabamos de obtener vemos que la partícula que inicialmente se está moviendo pierde energía cinética al chocar, mientras que la par- tícula que inicialmente estaba en reposo empieza a moverse (fig. 9.5813) y, por tanto, adquiere energía ci- nética. E s decir, durante la colisión la partícula I transfiere energía a la partícula 2.
Figuro 9.58 b
En general, como consecuencia de una colisión ocurre un intercambio de energía cinética entre las partículas; una pierde energía cinética mientras que otra la gana. De hecho, las colisiones son un mecanis- mo para que las partículas intercambien energía ciné- tica.
Ejercicio 9.22. Dos partículas experimentan una co- lisión elástica. Una de las partículas está inicialmente en reposo. S i las dos partículas tienen la misma masa, obtenga las velocidades de las partículas después de la colisión. Sea rn la masa de cada una de las partículas. Se tiene que
m, = m, = rn
Sea la partícula 2 la que inicialmente está en reposo (fig. 9.59a)
v2 = o
Las ecs. (9.1 63) y (9.164) se obtuvieron para el caso en que una de las partículas estuviese inicialmente en re- poso y la otra, la partícula 1, tuviese en este instante una velocidad vl. Si, además, las dos masas son igua- les, entonces estas ecuaciones quedan como
V I ' = o (9.1 65)
Y
= v1 (9.1 66)
Estos resultados nos dicen que después de la colisión la partícula que inicialmente se estaba moviendo que-
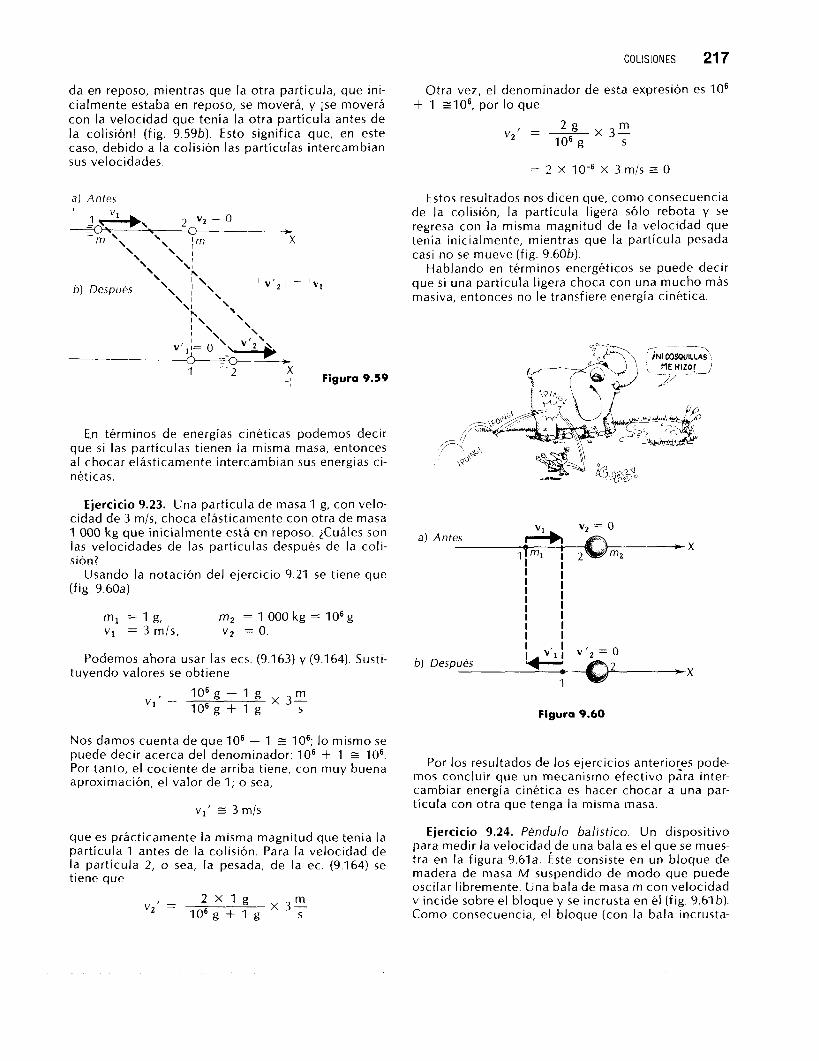
COLISIONES 21 7
da en reposo, mientras que la otra partícula, que ini- cialmente estaba en reposo, se moverá, y ¡se moverá con la velocidad que tenía la otra partícula antes de la colisión! (fig. 9.596). Esto significa que, en este caso, debido a la colisión las partículas intercambian sus velocidades.
1 v1
Figura 9.59
E.n términos de energías cinéticas podemos decir que si las partículas tienen la misma masa, entonces al chocar elásticamente intercambian sus energías ci- néticas.
Ejercicio 9.23. Una partícula de masa 1 g, con velo- cidad de 3 mis, choca elásticamente con otra de masa 1 O00 kg que inicialmente está en reposo. iCuáles son las velocidades de las partículas después de la coli- sión?
Usando la notación del ejercicio 9.21 se tiene que (fig. 9.60a)
m, = I g , r n 2 = 1 O00 kg = 106g v1 = 3 m/s, v2 = o.
Podemos ahora usar las ecs. (9.163) y (9.164). Susti- tuyendo valores se obtiene
Nos damos cuenta de que I O 6 - 1 z IO6; lo mismo se puede decir acerca del denominador: IO6 + 1 2 I O 6 . Por tanto, el cociente de arriba tiene, con muy buena aproximación, el valor de 1; o sea,
vl' 3 3 m/s
que es prácticamente la misma magnitud que tenía la partícula 1 antes de la colisión. Para la velocidad de la partícula 2, o sea, la pesada, de la ec. (9.164) se tiene que
Otra vez, el denominador de esta expresión es I O 6 + 1 =IO6, por lo que
= 2 x x 3m/s E O
Estos resultados nos dicen que, como consecuencia de la colisión, la partícula ligera scilo rebota y se regresa con la misma magnitud de la velocidad que tenía inicialmente, mientras que la partícula pesada casi no se mueve (fig. 9.60b).
Hablando en términos energéticos se puede decir que s i una partícula ligera choca con una mucho más masiva, entonces no le transfiere energía cinética.
V a ) Ant
v2 = o X
I I
I I
V a ) Ant
v2 = o X
I I
I I
I , v' ' v ' * = o b) Desp
X
Figura 9.60
Por los resultados de los ejercicios anteriores pode- mos concluir que un mecanismo efectivo para inter- cambiar energía cinética es hacer chocar a una par- tícula con otra que tenga la misma masa.
Ejercicio 9.24. Péndulo balistico. Un dispositivo para medir la velocidad,de una bala es el que se mues- tra en la f igura 9.61a. Este consiste en un bloque de madera de masa M suspendido de modo que puede oscilar libremente. Una bala de masa rn con velocidad v incide sobre el bloque y se incrusta en éI (fig. 9.61 b). Como consecuencia, el bloque (con la bala incrusta-
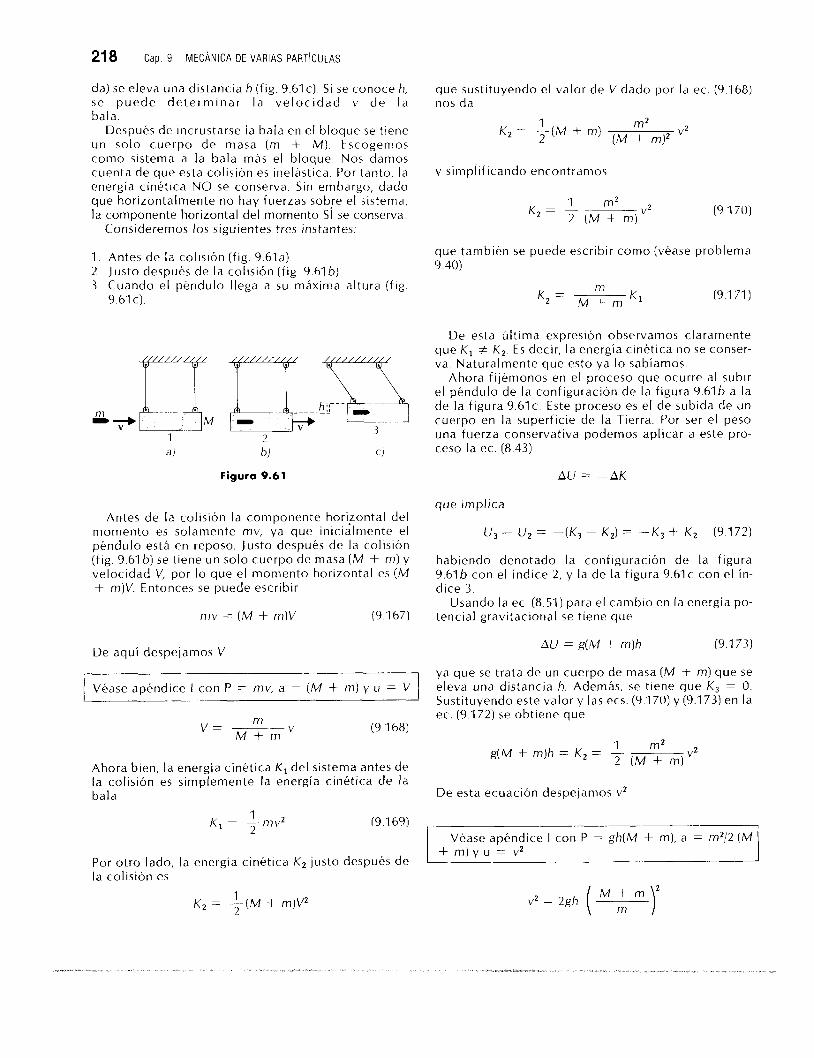
218 Cap. 9. MECANICA DE VARIAS PARTkULAS
da) se eleva una distancia h (fig. 9.61 c). Si se conoce h, se p u e d e d e t e r m i n a r l a v e l o c i d a d v de l a bala.
Después de incrustarse la bala en el bloque se tiene un solo cuerpo de masa ( m + M) . Escogemos como sistema a la bala más el bloque. Nos damos cuenta de que esta colisión es inelástica. Por tanto, la energía cinétrca NO se conserva. Sin embargo, dado que horizontalmente no hay fuerzas sobre el sistema, la componente horizontal del momento SI se conserva.
Consideremos los siguientes tres instantes:
1. Antes de la colisión (fig. 9.61a). 2. Justo después de la colisión (fig. 9.61b). 3. Cuando el péndulo llega a su máxima altura (f ig
9.61 c).
Antes de la colisión la componente horizontal del momento es solamente mv, ya que inicialmente el péndulo está en reposo. Justo después de la colisión (fig. 9.61b) se tiene un solo cuerpo de masa ( M + m) y velocidad V, por lo que el momento horizontal es (M + m)V. Entonces se puede escribir
mv = ( M + m)V (9.1 67)
D e aquí despejamos V
Véase apéndice I con P = mv, a = (M + m) y u = V I
V = m M + m V (9.1 68)
Ahora bien, la energía cinética K, del sistema antes de la colisión es simplemente la energía cinética de la bala
I
que sustituyendo el valor de V dado por la ec. (9.168) nos da
K, = - ( M + m) 1 m2 2 (M + m), v2
y simpiificando encontramos
(9 170)
que también se puede escribir como (véase problema 9.40)
K, = m ~ + m ~ , (9 1 71 )
De esta última expresión observamos claramente que K, # K,. E s decir, la energía cinética no se conser- va. Naturalmente que esto ya lo sabíamos.
Ahora fijémonos en el proceso que ocurre al subir e l péndulo de la configuración de la figura 9.61b a la de la f igura 9.61~. Este proceso es el de subida de un cuerpo en la superficie de la Tierra. Por ser el peso una fuerza conservativa podemos aplicar a este pro- ceso la ec. (8.43)
AU = - A K
que implica
U3 - U , -(K3 - K J “3 + KZ (9.1 72)
habiendo denotado la configuración de la figura 9.61b con el índice 2, y la de la figura 9 . 6 1 ~ con el ín- dice 3.
Usando la ec. (8.51) para el cambio en la energía po- tencial gravitacional se tiene que
AU = g(M + m)h (9.1 73)
ya que se trata de un cuerpo de masa (M + m) que se eleva una distancia h. Además, se tiene que K, = O. Sustituyendo este valor y las ecs. (9.1 70) y (9.1 73) en la ec. (9.172) se obtiene que
g(M + m)h = K, = - 1 m2 2 ( M + m I v 2
De esta ecuación despejamos v 2
K, = ‘mv2 2
Por otro lado, la energía cinética K, justo después de la colisión es
(9.169) Véase apéndice I con P = g h ( M + m), a = m2/2 ( M + m ) y u = vz
K, = - ( M + m)V2 1 2
v2 = 2 g h ( m ) ~ + m

PROBLFMAS 21 9
y sacando raíz cuadrada se obtiene finalmente que
(9.1 74)
Ejercicio 9.25. Sobre un péndulo balístico de masa 4.7 kg incide una bala de 30 g. Si el péndulo sube una distancia de 1.8 mm, iqué velocidad tenía la bala que se le incrustó?
En la notación del ejercicio 9.24 se tiene que
M = 4.7 kg, m = 30 g = 3 X kg h = 1 . 8 m m = 1.8 X 10-3m
Sustituyendo estos valores en la ec. (9.174) encontra- mos que
v = J2 X 9.8 X 1.8 X 10-3m m S
X 4.7 kg + 3 x kg
3 X kg
= 0.1878 - X 157.67 m S
= 29.61 mis = 106.6 km/h
Hasta este momento hemos estudiado la colisión de partículas que se mueven en una dimensión. Para colisiones elásticas se pudieron encontrar explí- citamente los valores de las magnitudes de las veloci- dades de las partículas después de la colisión (véanse ecs. (9.161) y (9.162)), usando únicamente las ecua- ciones de conservación del momento (ec. (9.1 50)) y de la energía (ec. (9.155)). No hubo necesidad de usar el valor de la fuerza que ejercen las partículas entre s í . Matemáticamente se pudo hacer lo anterior, ya que en este problema unidimensional se tienen dos ecua- ciones, (9.155) y (9.156), con dos incógnitas, v,’ y v2’ . AI resolver estas ecuaciones simultáneamente se en- contró la solución. Nótese que las incógnitas son las magnitudes de las velocidades después de la colisión.
En los casos de dos o tres dimensiones las cosas son distintas. En el caso de dos dimensiones hay que de- terminar ahora 2 vectores: v,’ y v2’, o sea, cuatro can- tidades. Pero las componentes de la’ec. (9,150) nos dan dos ecuaciones que aunadas a la ec. (9.155) son en total tres ecuaciones. Tenemos, pues, un problema con cuatro incógnitas y tres ecuaciones. Algo análogo ocurre en tres dimensiones. Esto significa que en estos casos, en general, las ecuaciones de conservación del momento y de la energía no son suficientes para de- terminar el estado después de la colisión. Como se estudiará en el capítulo próximo, existe otra ley de conservación, la del momento angular, que puede proporcionar una (o más) ecuaciones adicionales. En ocasiones esto es suficiente para poder determinar to- das las incógnitas del problema. En otras ocasiones, esto no resulta suficiente y sí se requiere del conoci-
miento de la fuerza entre las partículas para poder de- terminar completamente el problema. La solución de estos casos no corresponde a este texto, sino a uno más avanzado.
PROBLEMAS
9.1. Un r i f le de masa 9.6 kg dispara una bala de masa 33 g. E l rifle retrocede con una velocidad de 2.7 mis.
a) iQué velocidad adquiere la bala? b) )Por qué retrocede el rifle?
9.2. Demuestre la congruencia dimensional de la ec. (9.32). 9.3. Demuestre la ec. (9.33). 9.4. Demuestre la ec. (9.39). 9.5. Dos masas de 45 kg y 97 kg distan 4.2 m. Localice su centro de masa. 9.6. Obtenga el centro de masa de 3 partículas de ma- sas m,, m2 y m3 que están alineadas. La partícula de masa m2 está entre las otras dos. Suponga que la dis- tancia entre las primeras dos de ellas es h, y la distan- cia entre las dos últimas es h2. 9.7. Tres partículas de masas iguales se encuentran en los vértices del triángulo rectángulo mostrado en la figura 9.62.
Obtenga la posición del centro de masa. iDónde se encuentra el punto en que se cruzan las medianas del triángulo? 9.8. Obtenga el centro de masa de cuatro partículas que se encuentran en la configuración de la figura 9.63.
7rn
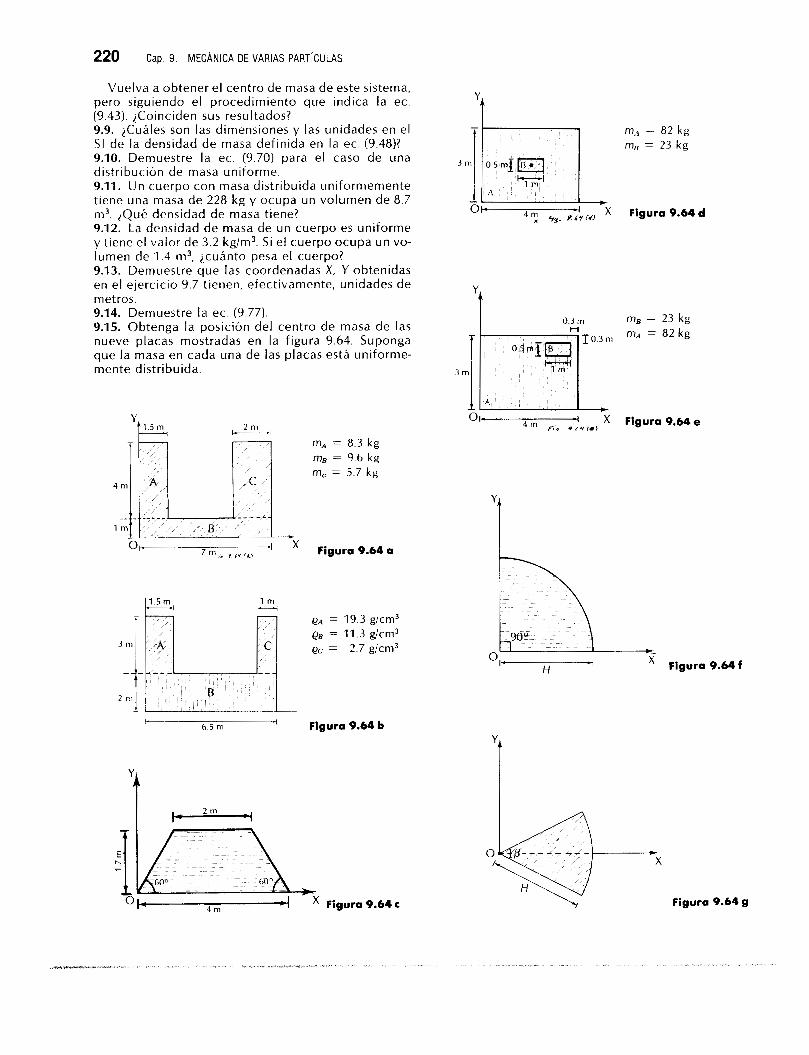
220 Cap. 9. MECANICA DE VARIAS PARTíCULAS
Vuelva a obtener el centro de masa de este sistema, pero siguiendo el procedimiento que indica la ec. (9.43). iCoinciden sus resultados? 9.9. iCuáles son las dimensiones y las unidades en el mA = 82 kg SI de la densidad de masa definida en la ec. (9.48)? mB = 23 kg 9.10. Demuestre la ec. (9.70) para el caso de una distribución de masa uniforme. 9.11. Un cuerpo con masa distribuida uniformemente tiene una masa de 228 kg y ocupa un volumen de 8.7 m3. iQué densidad de masa tiene? Figura 9.64 d 9.12: La densidad de masa de un cuerpo es uniforme y tiene el valor de 3.2 kg/m3. S i el cuerpo ocupa un vo- lumen de 1.3 m3, jcuánto pesa el cuerpo? 9.13. Demuestre que las coordenadas X, Y obtenidas en el ejercicio 9.7 tienen, efectivamente, unidades de metros. 9.14. Demuestre la ec. (9.77). 9.15. Obtenga la posición del centro de masa de las nueve placas mostradas en la figura 9.64. Suponga que la masa en cada una de las placas está uniforme- mente distribuida. 3 r n I
4 f j B L; m, = 8.3 kg mB = 9.6 kg m, = 5.7 kg
I r n " - ""_ _"" -
O ". "
7 m > * 9 ' ? ( U x Figura 9.64 a
eA = 19.3 g/crn3
ec = 2.7 g/crn3 @B = 11.3
ic 6 .5 r n 4 Figura 9.64 b
i C
0.3 rn mB = 23 kg H mA = 82 kg
4 m 6." .L, x Figura 9.64 e
YI Figura 9.64 f
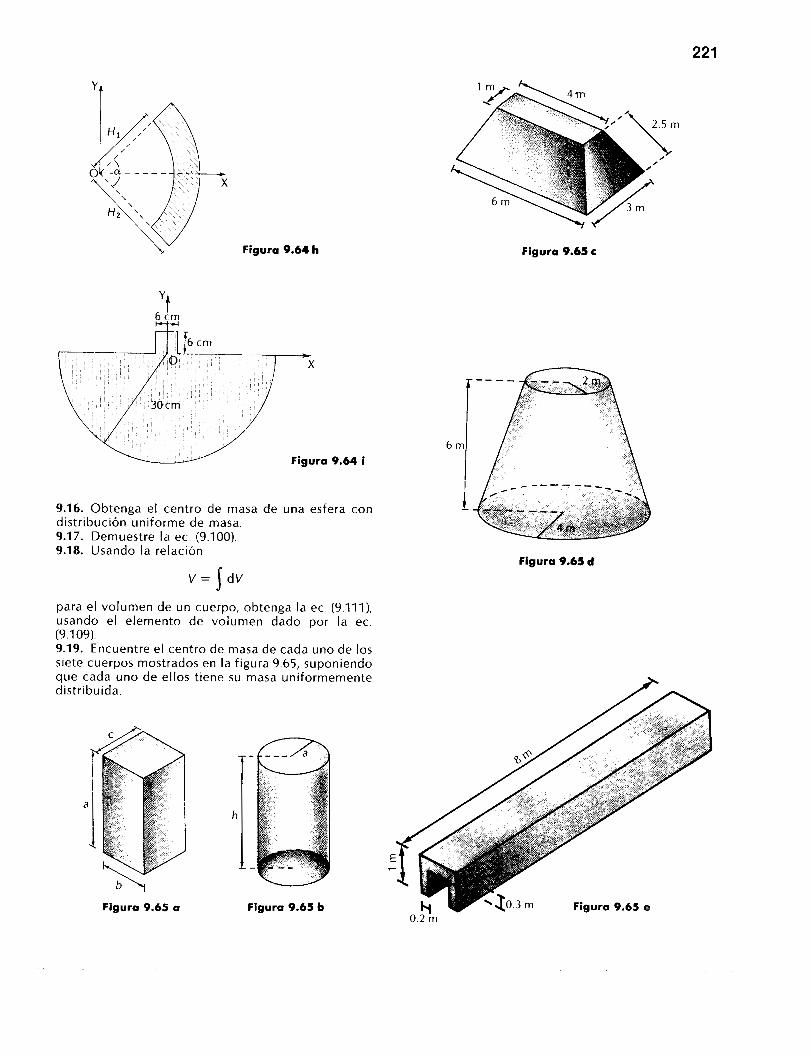
221
Figura 9.64 h Figura 9.65 c
9.16. Obtenga el centro de masa de una esfera con distribución uniforme de masa. 9.17. Demuestre la ec. (9.100). 9.18. Usando la relación
Figuro 9.65 d v = dV 3
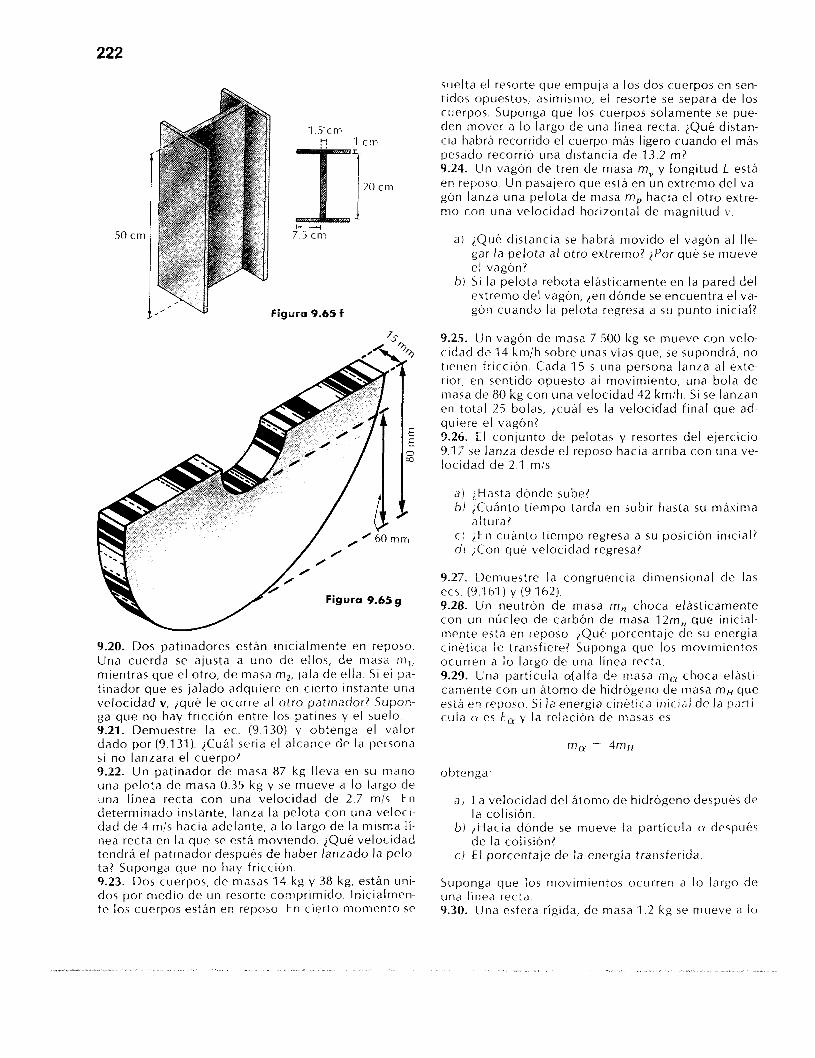
222
I
SO cm
1 .5cm
7.5 cm b-"!
,,, u1 Figuro 9.65 f
E E O c c
9.20. Dos patinadores están inicialmente en reposo. Una cuerda se ajusta a uno de ellos, de masa m l ,
mientras que P I otro, de masa r n 2 , l a la de ella. Si el pn- tinador que es jalado adquiere en cierto instante und velocidad v, iqué le ocurre al otro patinador? Supon- ga que no hay fricción entre l o s patines y el suelo 9.21. Demuestre la ec. (9.130) y obtenga el valor dado por (9,131). iCuál sería el alcance de la persona s i no lanzara el cuerpo? 9.22. Un patinador de niasa 87 kg l leva en s u mano una pelota de masa 0.35 kg y se mueve a lo largo de una línea recta con una velocidad de 2 7 mis. En determinado instante, lanza la pelota con una veloci- dad de 4 mis hacia adelante, a lo largo de la misma I i - nea recta en la que se está moviendo. iQué velocidad tendrá el patinador despuPs de haber lanzado la pelo- t a ? Suponga que no hay frlcción. 9.23. Dos cuerpos, de masas 14 kg y 38 kg, están uni- dos por medio de un resorte comprimido. Inicialmen- te los cuerpos están en reposo En cierto momento se
suelta el resorte que empuja a los dos cuerpos en sen- tidos opuestos, asimismo, e¡ resorte se separa de los cuerpos. Suponga que los cuerpos solamente se pue- den mover a lo largo de una línea recta. iQué distan- cia habrá recorrido el cuerpo más ligero cuando el más pesado recorrió una distancia de 13.2 m ? 9.24. U n vagón de tren de masa mV y longitud L está en reposo Un pasajero que está en un extremo del va- gón lanza una pelota de masa mp hacia el otro extre- mo con una velocidad horizontal de magnitud v.
a ) iQué distancia se habrá movido el vagón a l Ile- gar la pelota a l otro extremo? iPor qué se mueve el vagón?
b) Si la pelota rebota elásticamente en l a pared del extremo del vagón, ien dónde se encuentra el va- gón cuando la pelota regresa a su punto inicial?
9.25. Un vagón de masa 7 500 kg se mueve con velo- cidad de 14 km/h sobre unas vías que, se supondrá, no tienen fricción. Cada 1 5 S una persona lanza al exte- rior, en sentido opuesto al movimiento, una bola de rnasa de 80 kg con una velocidad 42 km/h. Si se lanzan en total 25 bolas, )cuál es la velocidad final que ad- quiere el vagón? 9.26. E l conjunto de pelotas y resortes del ejercicio 9.17 se lanza desde e l reposo hac ia arriba con una ve- locidad de 2.1 mis
a ) (Hasta dónde sube? bi >Cuánto tiempo tarda en subir hasta su máxima
ci iEn cuánto t iempo regresa a su posición inicial? d! icon qué velocidad regresa?
altura?
9.27. Demuestre la congruencia dimensional de las ecs. (9,161) y (9.162). 9.28. Un neutrón de masa m, choca elásticamente con un núcleo de carbón de masa 12m, que inicial- mente está en reposo i Q u é porcentaje de su energía cinétlca le transfiere? Suponga que los movimientos ocurren a ¡o largo de una línea recta. 9.29. Una partícula dalfa de masa m, choca elástl- camente con un átorno de hidrógeno de masa mH que es t6 en rehmso. S i la energía cinkticd inici;il de la pcir!i- cula a es t , y la relación de masas es
m, = 4rnN
obtenga:
a i La velocidad del átomo de hidrógeno despuks de
b) iHacia dónde se mueve la partícula a después
ci E l porcentaje de la energía transferlda.
la colisión.
de la colisión?
Suponga que ¡os movimientos ocurren a lo largo de una línea recta. 9.30. Una esfera rígida, de masa 1.2 kg se mueve a lo
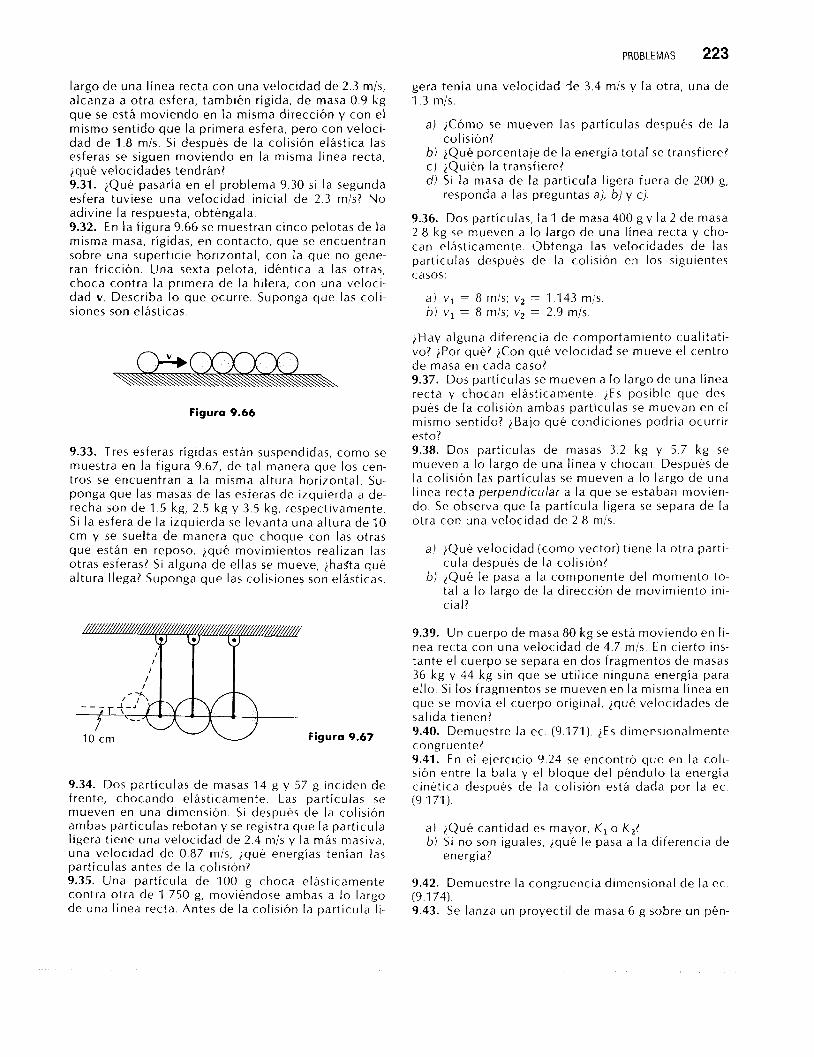
PROBLEMAS 223
largo de una línea recta con una velocidad de 2.3 mis, alcanza a otra esfera, también rígida, de masa 0.9 kg que se está moviendo en la misma dirección y con el mismo sentido que la primera esfera, pero con veloci- dad de 1.8 mis. S i después de la colisión elástica las esferas se siguen moviendo en la misma línea recta, iqué velocidades tendrán? 9.31. iQué pasaría en el problema 9.30 si la segunda esfera tuviese una velocidad inicial de 2.3 mis? No adivine la respuesta, obténgala. 9.32. En la figura 9.66 se muestran cinco pelotas de la misma masa, rígidas, en contacto, que se encuentran sobre una superficie horizontal, con la que no gene- ran fricción. Una sexta pelota, idéntica a las otras, choca contra la primera de la hilera, con una veloci- dad v. Describa lo que ocurre. Suponga que las coli- siones son elásticas.
Figura 9.66
9.33. Tres esferas rígidas están suspendidas, como se muestra en la figura 9.67, de tal manera que los cen- tros se encuentran a la misma altura horizontal. Su- ponga que las masas de las esferas de izquierda a de- recha son de 1.5 kg, 2.5 kg y 3.5 kg, respectivamente. S i la esfera de la izquierda se levanta una altura de 10 cm y se suelta de manera que choque con las otras que están en reposo. iqué movimientos realizan las otras esferas? Si alguna de ellas se mueve, ihafta qué altura llega? Suponga que las colisiones son elásticas.
' I ' r X
- -- - J-,
"
10 cm Figura 9.67
9.34. Dos partículas de masas 14 g y 57 g inciden de frente, chocando elásticamente. Las partículas se mueven en una dimensión. Si después de la colisión ambas partículas rebotan y se registra que la partícula ligera tiene una velocidad de 2 4 mis y la más masiva, una velocidad de 0.87 mis, i qué energías tenían las partículas antes de la colisión? 9.35. Una partícula de 100 g choca elásticamente contra otra de 1 750 g, moviéndose ambas a lo largo de una línea recta. Antes de la colisión la partícula Ii-
gera tenía una velocidad l e 3.4 mis y la otra, una de 1 .3 mis.
a) 2CÓmo se mueven las partículas después de la
b ) >Qué porcentaje de la energía total se transfiere? c) iQuién la transfiere? d ) Si la masa de la partícula ligera fuera de 200 g,
colisión?
responda a las preguntas a), b) y c).
9.36. Dos partículas, la 1 de masa 400 g y la 2 de masa 2.8 kg se mueven a lo largo de una línea recta y cho- can elásticamente. Obtenga las velocidades de las partículas después de la colisión en los siguientes casos:
a ) v1 = 8 mis; v2 = 1 143 mis 6) v1 = 8 mls; v2 = 2.9 mis.
)Hay alguna diferencia de comportamiento cualitati- vo? 2Por qué? icon qué velocidad se mueve el centro de masa en cada caso? 9.37. Dos partículas se mueven a lo largo de una línea recta y chocan elásticamente. 2Es posible que des- pués de la colisión ambas partículas se muevan en el mismo sentido? iBajo qué condiciones podría ocurrir esto? 9.38. Dos partículas de masas 3.2 kg y 5.7 kg se mueven a lo largo de una línea y chocan. Después de la colisión las partículas se mueven a lo largo de una línea recta perpendicular a la que se estaban movien- do. Se observa que la partícula ligera se separa de la otra con una velocidad de 2.8 mis.
a ) >Qué velocidad (como vector) tiene la otra partí- cula después de la colisión?
b ) 2Qué le pasa a la componente del momento to- tal a lo largo de la dirección de movimiento ini- cial?
9.39. Un cuerpo de masa 80 kg se está moviendo en lí- nea recta con una velocidad de 4.7 mis. En cierto ins- tante el cuerpo se separa en dos fragmentos de masas 36 kg y 44 kg sin que se utilice ninguna energía para ello. Si los fragmentos se mueven en la misma línea en que se movía el cuerpo original, iqué velncidades de salida tienen? 9.40. Demuestre la ec (9.171). i E s dimensionalmente congruente? 9.41. En el ejercicio 9.24 se encontró que en la coli- sión entre la bala y el bloque del péndulo la energía cinética después de la colisión está dada por la ec. (9 171).
a ) iQué cantidad es mayor, K1 o K,? b) Si no son iguales, iqué le pasa a la diferencia de
energía?
9.42. Demuestre la congruencia dimensional de la ec. (9.1 74). 9.43. Se lanza un proyectil de masa 6 g sobre un pén-

224 Cap. 9. MECANICA DE VARIAS PARTíCULAS
dulo balistico de masa 750 p. E l proyectil se incrusta distribución de masa uniforme, debe estar en su cen- en el péndulo. Se requiere que el péndulo se eleve tro geométrico (véase fig. 9.4613). una altura de 1 . 5 cm. iQuc? velocidad debe tener el 9.45. Usando argumentos de simetría, demuestre que proyecti l? e l centro de masa de una placa semicircular delgada, 9.44. Usando argumentos de simetría, demuestre que con distribución de masa uniforme, debe estar sobre el centro de masa de una placa circular delgada. con la línea OD (véase fig. 9 . 4 6 ~ ) .
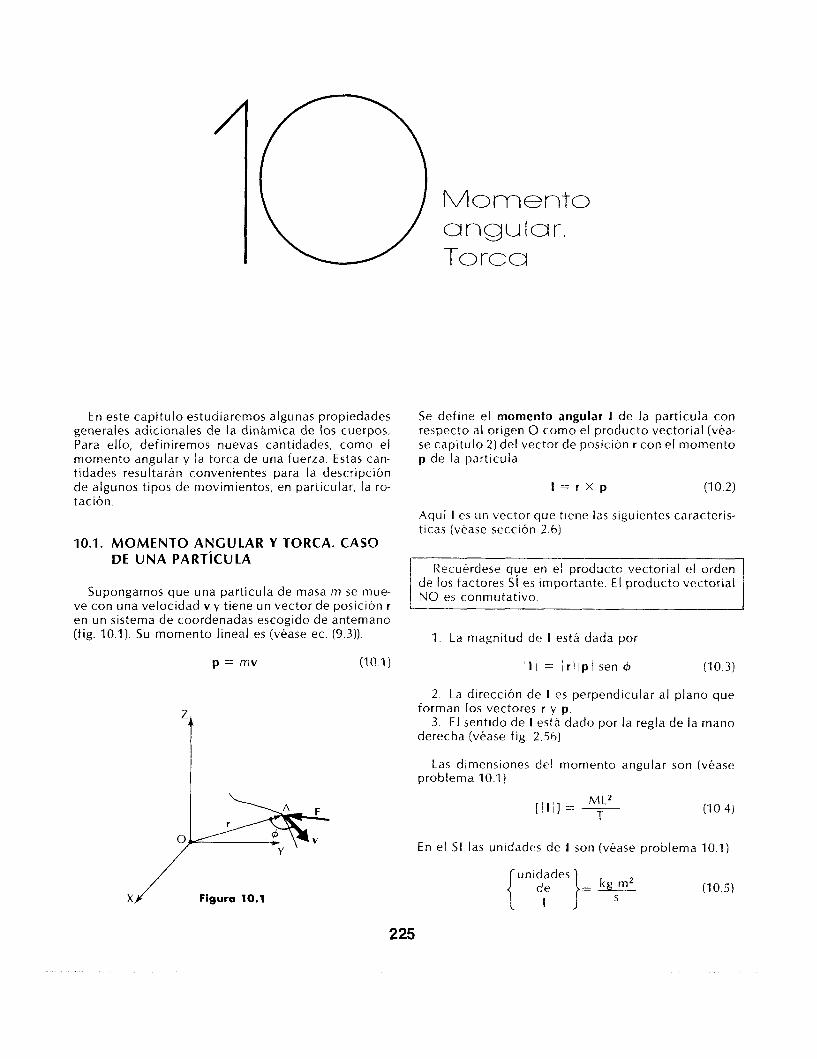
IO Momento angular. T o r c a
En este capitulo estudiaremos algunas propiedades Se define el momento angular I de la partícula con generales adicionales de la dinámica de los cuerpos. respecto al origen O como el producto vectorial (véa- Para ello, definiremos nuevas cantidades, como el se capítulo 2) del vector de posicibn r con el momento mornento angular y la torca de una fuerza. Estas can- p de la partícula tidades resultarán convenientes para la descripción de algunos tipos de movimientos, en particular, la ro- l = r X p (1 0.2) tación.
Aqui I es un vector que tiene las siguientes caracteris- ticas (véase sección 2.6)
10.1. MOMENTO ANGULAR Y TORCA. CASO DE UNA PARTíCULA 1 Recuérdese que en el producto vectorial el orden I
Supongamos que una partícula de masa m se mue- 1 de los factores Sí es importante. E l producto vectorial . . NO es conmutativo.
ve con una velocidad v y tiene un vector de posición r ~
en un sistema de coordenadas escogido de antemano
~~
(fig. 10.1). Su momento l ineal es (véase ec. (9.3)),. 1. La magnitud de I está dada por
p = mv (10.1) ill = í r l l p l sen 4 (1 o. 3 )
X / Figura 10.1
2. La dirección de I es perpendicular al plano que
3. E l sentido de I está dado por la regla de la mano forman los vectores r y p.
derecha (véase fig. 2.56)
Las dimensiones del momento angular son (véase problema l O . ~ l )
(1 0.4)
En el SI las unidadps de I son (véase problema 10.1)
unidades
S (1 0.5)
225

I
(10.61 j l
.. _. .... _ _ ..-,..I_ " .... "_ ..... ..
F Inatmentt?, se tiene, entonces,
dl d t - = 7 (10.11)
t s t a er.uaci6i: nos Indica que l a torca de una fuerza causa un cambio en el momento angular de la partí- c u / a h'otese que la información física que contiene l a ca- (1011) e s la contenida en la segunda ley de New- ton lev que se usó en su obtención.
La\ cizme.nslone5 de Id torca son (véase ejercicio 10 2 )
(10.1 2)
= m X N (10.1 3)
Ejercicio 18.'1, Una partícula de masa 22 kg tiene en cierto instante una velocidad de magnitud 7.2 mls, or;Ll tiirec ción y sentido que forman un ángulo de 37" ron el vector de posición. En este mismo instante, la o, ir t icuId dtstd 3.6 m de origen de coordenadas. 2Qué v < ; I o r t ienc la magnitud de su momento angular?
c.:., irido ¡as ecs (10.1) y (10.3). se tiene para la mag- I I ! I ~ ; : ! ( i d momento angl;lar
i i = , r I i p : sen4 = sen c$
= 3.6 m X 22 kg X (7 2 m;s) x sen 37O = 343.2 kg m2/s
Supongamos que una partícula se encuentra en el rlclnto P mostrado en la figura (10 2) El vector de posi- < !brl d e la partícula P T r, mientras que la fuerza que ac:ua sobre el la es F. E s t o s dos vectores torman un án- gula 0 Consideraremos dos posibilidades para calcu- iar l a t o r c a d t F con re5pecto J 0
-+ o
1 ""* ,
- ,
Figura 10.2
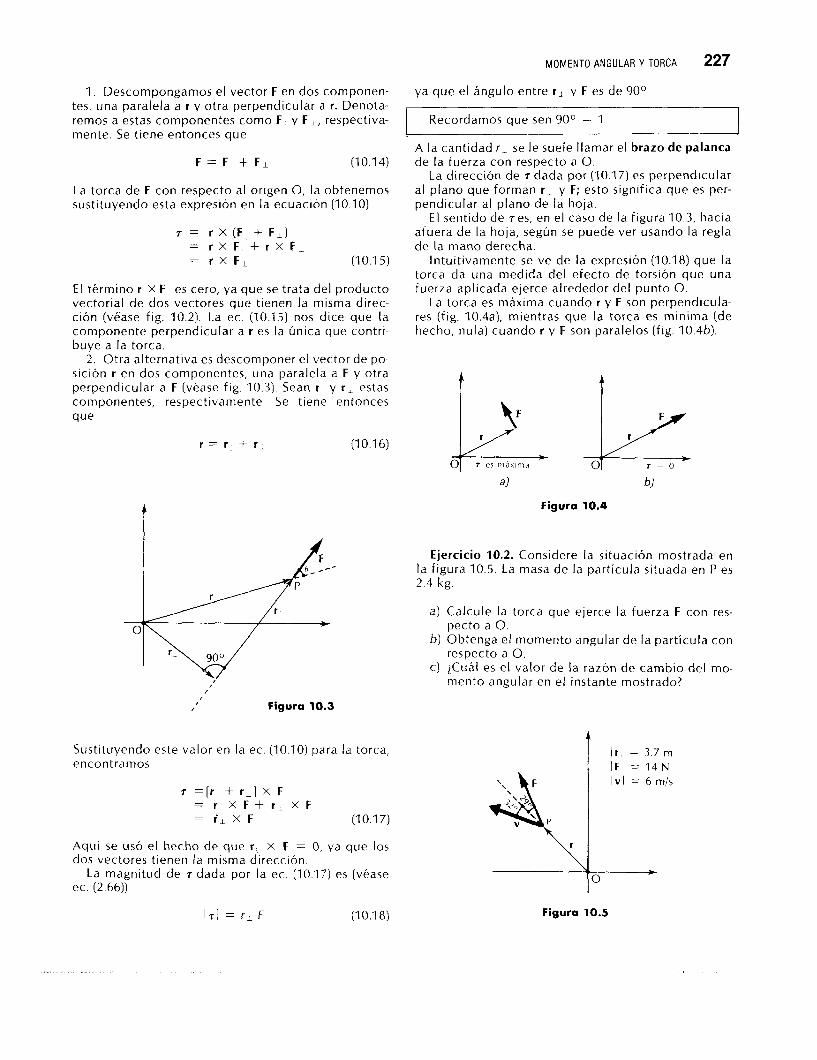
MOMENTO ANGULAR Y TORCA 227 1. Descompongamos el vector F en dos componen-
tes, una paralela a r y otra perpendicular a r. Denota- remos a estas componentes como F y F I , respectiva- mente. Se tiene entonces que
F F , f F I (1 0.1 4)
La torca de F con respecto al origen O, la obtenemos sustituyendo esta expresión en la ecuación (10.10)
7 = r X (F + F,) = r X F + r X F , = r X F I (1 0.1 5)
E l término r x Fil es cero, ya que se trata del producto vectorial de dos vectores que tienen la misma direc- ción (vease fig. 10.2). La ec. (10.15) nos dice que la componente perpendicular a r es la única que contri- buye a la torca.
2. Otra alternativa es descomponer el vector de po- sición r en dos componentes, una paralela a F y otra perpendicular a F (véase fig. 10.3). Sean r y rI estas componentes, respectivamente. Se tiene entonces que
r = r + r l (1 0.1 6)
ya que el ángulo entre ri y F es de 90°
I Recordamos que sen 90° = 1 I A la cantidad r , se le suele llamar el brazo de palanca de la fuerza con respecto a O.
La dirección de T dada por (10.17) es perpendicular al plano que forman ri y F; esto significa que es per- pendicular al plano de la hoja.
E l sentido de 7es, en el caso de la figura 10.3, hacia afuera de la hoja, según se puede ver usando la regla de la mano derecha.
lntuit ivamente se ve de la expresión (10.18) que la torca da una medida del efecto de torsión que una fuerza aplicada ejerce alrededor del punto O.
La torca es máxima cuando r y F son perpendicula- res (fig. 10.4a), mientras que la torca es mínima (de hecho, nula) cuando r y F son paralelos (fig. 10.4b).
t t
f Figura 10.4
I Figura 10.3
Sustituyendo este valor en la ec. (10.10) para la torca, encontramos
7 =[r + r L l X F = r X F + r , X F = i i X F (1 0.1 7 )
Aquí se usó el hecho de que r X F = O, ya que los dos vectores tienen la misma direccibn.
La magnitud de 7 dada por la ec. (10.17) es (véase ec. (2.66))
Ejercicio 10.2. Considere la situación mostrada en la figura 10.5. La masa de la partícula situada en P es 2.4 kg.
Calcule la torca que ejerce la fuerza F con res- pecto a O. Obtenga el momento angular de la partícula con respecto a O. )Cuál es el valor de la razón de cambio del mo- mento angular en el instante mostrado?
t Ir1 = 3.7 m IF1 = 1 4 N Iv I = 6 mis
I T ( = r l F (10.1 8) Figura 10.5
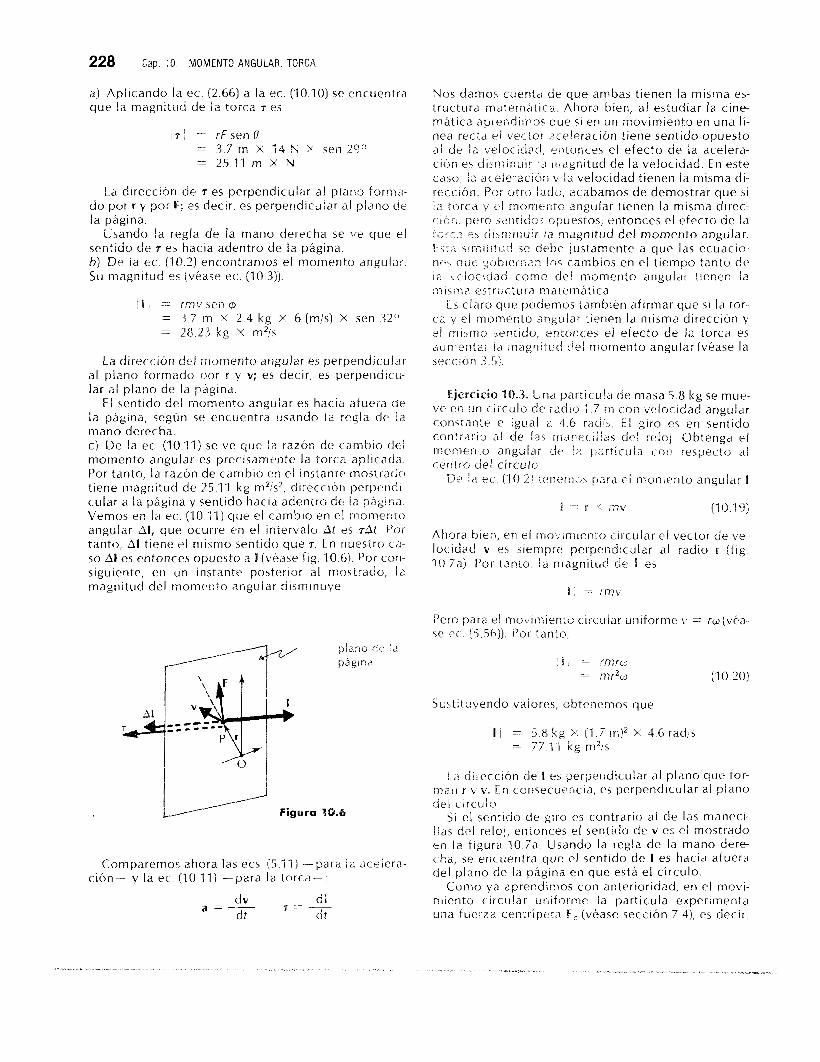
228 cap. I O . MOMENTO ANGULAR. TORCA
a) Aplicando l a ec. (2.66) a la ec. (10.10) se encuentra que la magnitud de la torca S es
i r / = rFsen 15' -y= 3.7 m X 14 N X sen 29') = 25.11 m X N
La dlreccion de T es perpendicuiar ai p i a n o forma- do por r y por S; t s decir, es perpendicular dl plano cie la pagina.
Usando la regla de la mano derecha se ve que el sentido de T e; hacia adentro de la página. b) De la ec. (10.2') encontramos el momento angular. Su magnitud es (vkase ec. (10.3)).
I I i = rmvsen @ = 3.7 rl-I ?: 2.4 kg >(: 6 (m/s) X sen 32" = 28.23 kg X m2/s
La direcci6n del momento angular es perpendicular al plano formadc por r y v; es decir, es perpendicu lar al plano de I J p ig ina
€ 1 sentido dei momento angular es hacia afuera de la página, según se encuentra usando la regla de la mano derecha. c) De la ec. (10.11) se ve que la razon de cambio dei momento angular es precisamente la torca apl!catin. Por tanto, la rarbn de cambio en el instante mostrado tiene magnitud de 25 11 kg m2!s2, clireccibn perpendi- cular a la pagina y sentido hacla adentro de la pAg/~:i*. Vernos en la t'c. (10.11) que el cambio en el r-come:rro angular Al, que ocurre en el intervalo At es T&. Por- tanto, AI tiene el mismo sentido que T. En nuestro ca- so AI es entonces opuesto a l (véase fig. 1 0 . b j Por con- siguiente, en un instante posterior ai mostrado, Id magnitud del momen!o angular disminuye
L"--" Figura 10.6
Comparemos ahora las ecs (5.11) -par;: la zceiera- cibn- y la ec (1011) "para la torca-
dv d i d l d l
a = __ " ".
Scstituvendo valores, obtc,nemos
(10.20)
que
x 4.6 radis
! il dirección d e I e s perpendicular al plano que tor- JXdll r y v. En consecuenc~a, e~ perpendicular al plano del L i r L u I c .
SI e l sentido de giro es contrario al de las manecl- lids d r i reloj, entonces el sentido tie v es el mostrado en la figura 10.7a. Usando la regla de Id mano dere- cha, se encuentra que el sentido de I es hacia afuera del plano de la pagina en que esta el círculo.
Como ya aprendimos con anterioridad, en el movi- miento circular Gniiorme la partícula experimetnta una fuerza cenrripota F , (vkase secclbn 7 4), es decir,
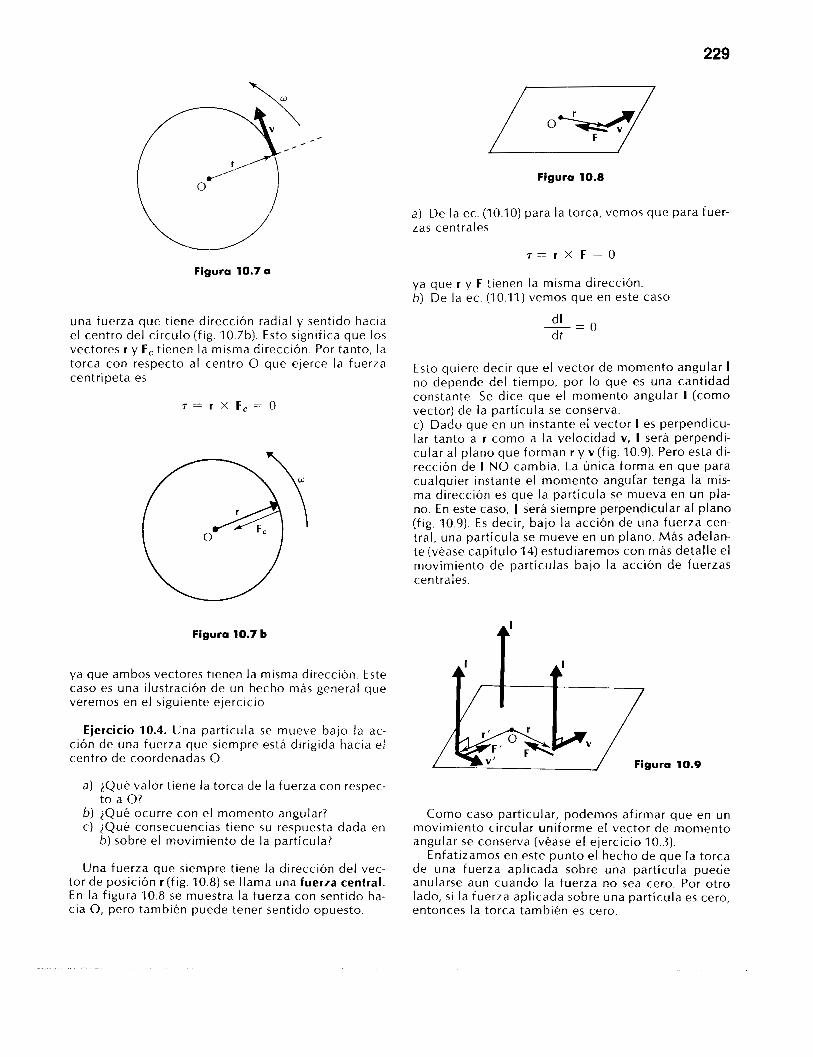
Figura 10.8
a) De la ec. (10.10) para la torca, vemos que para fuer- zas centrales
T = r X F = O Figura 10.7 o
ya que r y F tienen la misma dirección. b) De la ec. (10.11) vemos que en este caso
una fuerza que tiene dirección radial y sentido hacia el centro del círculo (fig. 10.7b). Esto significa que los vectores r y F, tienen la misma dirección. Por tanto, la torca con respecto al centro O que ejerce la fuerza centrípeta es
7 = r X F C = O
Figura 10.7 b
ya que ambos vectores tlenen la misma dirección. Este caso es una ilustración de un hecho más general que veremos en el siguiente ejercicio.
Ejercicio 10.4. Una partícula se mueve bajo la ac- ción de una fuerza que siempre esta dirigida hacia el centro de coordenadas O.
a) iQué valor tiene la torca de la fuerza con respec-
b) iQué ocurre con el momento angular? c) iQué consecuencias tiene su respuesta dada en
to a O?
b) sobre el movimiento de la partícula?
Una fuerza que siempre tiene la dirección del vec- tor de posición r (fig. 10.8) se llama una fuerza central. En la figura 10.8 se muestra la fuerza con sentido ha- cia O, pero también puede tener sentido opuesto.
Esto quiere decir que el vector de momento angular I no depende del tiempo, por lo que es una cantidad constante. Se dice que el momento angular I (como vector) de la partícula se conserva. c) Dado que en un instante el vector I es perpendicu- lar tanto a r como a la velocidad v, I será perpendi- cular al plano que forman r y v (fig. 10.9). Pero esta di- rección de I NO cambia. La única forma en que para cualquier instante el momento angular tenga la mis- ma dirección es que la partícula se mueva en un pla- no. En este caso, I será siempre perpendicular al plano (fig. 10.9). E s decir, bajo la acción de una fuerza cen- tral, una partícula se mueve en un plano. Más adelan- te (véase capítulo 14) estudiaremos con más detalle el movimiento de partículas bajo la acción de fuerzas centrales.
Como caso particular, podemos afirmar que en un movimiento circular uniforme el vector de momento angular se conserva (véase el ejercicio 10.3).
Enfatizarnos en este punto el hecho de que la torca de una fuerza aplicada sobre una partícula puetie anularse aun cuando la fuerza no sea cero. Por otro lado, s i la fuerza aplicada sobre una partícula es cero, entonces la torca también es cero.
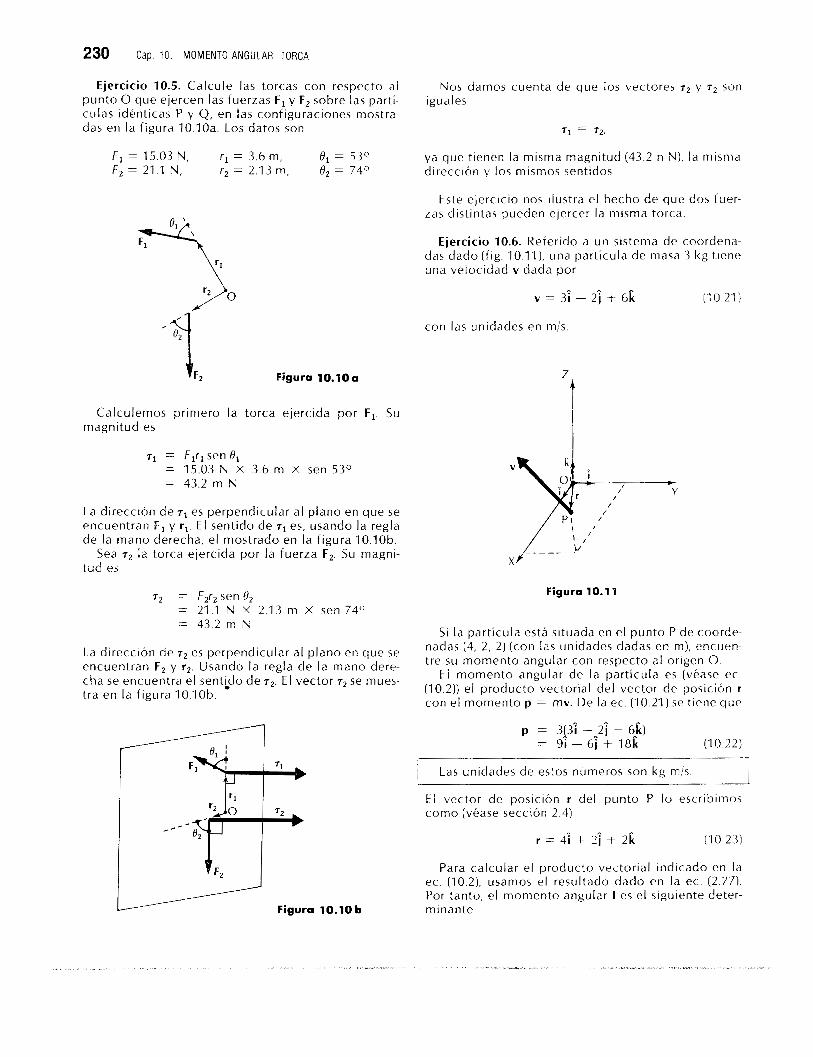
230 Cap. 1cl. MOMENTO ANGULAR TORCA
Ejercicio 10.5. Calcule las torcas con respecto al Nos damos cuenta de que los vectores 72 y 7, son punto O que ejercen las fuerzas F , y F, sobre las partí- iguales culas idénticas P y Q, en las configuraciones mostra- das en la figura 10.10a. Los datos son 71 72,
F, = 15.03 N, r l = 3.6 m, dl = 530 ya que tienen la misma magnitud (43.2 n N), la misma F, = 21 .I N, r2 = 2.13 m, 0, = 74" dirección y los mismos sentidos.
Este ejercicio nos ilustra el hecho de que dos fuer- zas distintas pueden ejercer la misma torca.
Figura 10.10a
Calculemos primero la torca ejercida por F l . Su magnitud es
7, = F,r, sen 0, = 15.03 N X 3.6 m X sen 53O = 43.2 m N
La dirección de I , es perpendicular al plano en que se encuentran F , y r,. El sentido de T, es, usando la regla de la mano derecha, el mostrado en la figura 10.10b.
Sea 72 la torca ejercida por la fuerza Fa. Su magni- tud es
Ejercicio 10.6. Referido a un sistema de coordena- das dado (f ig. lO.l l), una partícula de masa 3 kg tiene una velocidad v dada por
v = 37 - 21 + 6& (10.21)
con las unidades en m!s
z
r , = F,r, sen Figura 10.1 1
= 21 1 N X 2.13 m X sen 74O = 43.2 m N Si la partícula está situada en el punto P de coorde-
La dirección de 72 es perpendicular al plano en que se encuentran F, y r,. Usando la regla de la mano dere- cha se encuentra el sentido de 72. E l vector 72 se mues- tra en la figura 10.10b.
nadas (4, 2, 2) (con las unidades dadas en m), encuen- tre su momento angular con respecto al origen O
E1 momento angular de la partícula es (véase ec. (10.2)) el producto vectorial del vector de posición r con el momento p = mv. De la ec. (10.21) se tiene que
p = 313; --_21 + 6&) = 9i - 6j + I S & (10.22)
Las unidades de estos números son kg m!s.
E l vector de posición r del punto P lo escribirnos como (véase sección 2.4)
Figura 10.10b
Para calcular el producto vectorial indicado en la ec. (10.2), usamos el resultado dado en la ec. (2.77). Por tanto, el momento angular I es el siguiente deter- minante
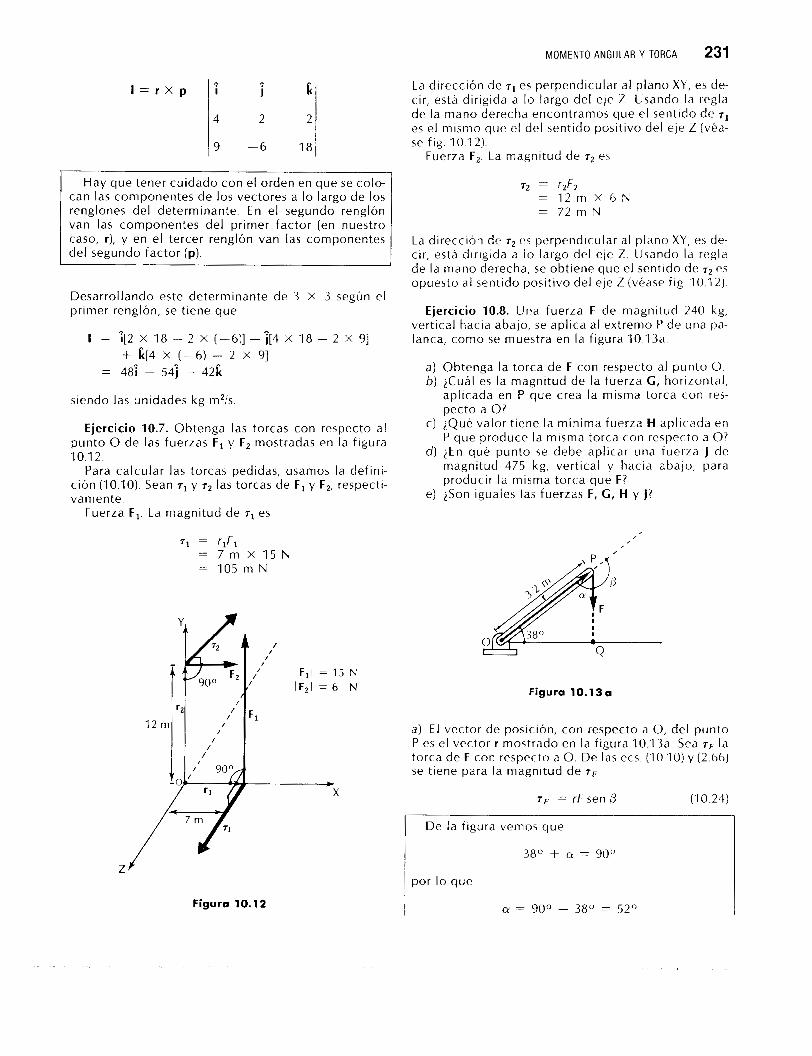
I = r x p
Hay que tener cuidado con el orden en que se colo- can las componentes de los vectores a lo largo de los renglones del determinante. En el segundo renglón van las componentes del primer factor (en nuestro caso, r), y en el tercer renglón van las componentes del segundo factor (p).
Desarrollando este determinante de 3 X 3 según el primer renglón, se tiene que
I = ?[2 X 18 - 2 X ( -6) ] -;[4 X 18 - 2 X 91 + G[4 x ( " 6 ) - 2 x 91
= 481 - 54; - 42k
siendo las unidades kg m2/s
Ejercicio 10.7. Obtenga las torcas con respecto a l punto O de las fuerzas F , y F, mostradas en la flgura 10.1 2.
Para calcular las torcas pedidas, usamos la defini- ción (10.10). Sean 7 , y T~ las torcas de F , y F,, respecti- vamente.
Fuerza F, . La magnitud de 7 , es
= r,F, = 7 m X 1 5 N = 10.5 m N
Z J
MOMENTO ANGULAR Y TORCA 231
La dirección de 7 , es perpendicular al plano XY, es de- cir, está dirigida a lo largo del eje Z. Usando la regla de la mano derechd encontramos que el sentido de 7 ,
es el mismo que el del sentido positivo del eje Z (véd- se fig. 10.12).
Fuerza F,. La magnitud de T~ t 's
72 = r,F, = 12 m S 6 N = 7 2 m N
La dirección de T~ es perpendicular al plano XY, es de- cir, está dirlgida a jo largo del eje L. Usando l a regla de la mano derecha, se obtiene que el sentido de T~ es opuesto al sentido positivo del eje Z (véase f ig 10 1 2 ) .
Ejercicio 10.8. Una fuerza F de magnitud 240 kg, vertical hacia abajo, se aplica al extremo P de una pa- lanca, como se muestra en la figura 10.13a
a) Obtenga la torca de F con respecto al punto O. b) iCuá1 es la magnitud de la fuerza G , horizontal,
aplicada en P que crea la misma torca con res- pecto a O?
c) iQué valor tiene la mínima fuerza H aplicada en P que produce la misma torca con respecto a O?
d ) iEn qué punto se debe aplicar una fuerza j de magnitud 475 kg, vertical v hacia abajo, para producir la misma torca que F ?
e) i s o n iguales las fuerzas F, G , H y J <
,
O r
Figura 1 O. 13 a
a) E l vector de posición, con respecto a O, del punto P es el vector r mostrado en la figura 10.13a. Sea T~ la torca de F con respecto a O. De las ecs. (10.10) y (2.66) se tiene para la magnitud de T ~ -
T~ = rFsen /3 (10.24)
38" + 01 = 90"
por lo que
CY = 90° - 38O = 52"
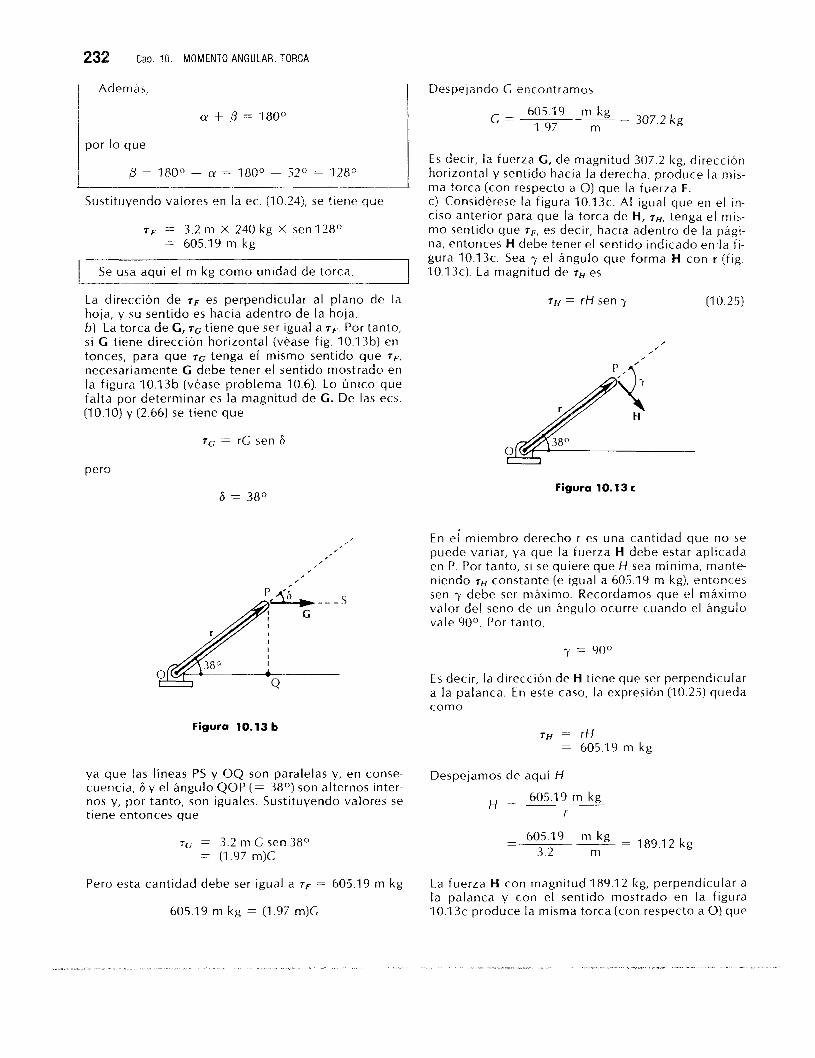
23 C m . 10. MOMENTO ANGULAR. TORCA
i Además, I Despejando C encontramo5
CY + /3 = 180°
por lo que
/3 = 180" - LY = 180' - 52' = 128O
Sustituyendo valores en la ec. (10.241, se tiene que
T~ = 3.2 m X 240 kg X sen 128O = 605.19 m kg
usa aquí el m kg como unidad de torca. 1 La dirección de T~ es perpendicular al plano de la hoja, y su sentido es hacia adentro de la hoja. b) La torca de G , TG tiene que ser igual a TF. Por tanto, s i C tiene dirección horizontal (véase fig. lO.13b) en- tonces, para que 76 tenga el mismo sentido que T ~ , necesariamente C debe tener el sentido mostrado en la figura 10.13b (véase problema 10.6). Lo Único que falta por determinar es la magnitud de C . De las ecs. (10.10) y (2.66) se tiene que
T~ = rC sen 6
pero
6 = 38O
L
Figura 10.13 b
C = 605 19 m kg 1.97 m " - 307.2 k g
E s decir, la fuerza C , de magnitud 307.2 kg, dirección horizontal y sentido hacia la derecha, produce l a mis- ma torca (con respecto a O) que la fuerza F. c) Considérese la figura 1 0 . 1 3 ~ . A l igual que en el in- ciso anterior para que la torca de H, T ~ , tenga el mis- mo sentido que T ~ , es decir, hacia adentro de la pági- na, entonces H debe tener el sentido indicado en la ti- gu ra 10 .13~ . Sea y el ángulo que forma H con r (fig. 10 .13~) . La magnitud de T~ es
TH = rH sen y (I 0.25)
/ /
Figura 10.13 c
En e¡ miembro derecho r es una cantidad que no se puede variar, ya que la fuerza H debe estar aplicada en P. Por tanto, s i se quiere que H sea mínima, mante- niendo rH constante (e igual a 605.19 m kg), entonces sen y debe ser máximo. Recordamos que el máximo valor del seno de un ángulo ocurre cuando el ángulo vale goo. Por tanto,
ya que las líneas PS y OQ son paralelas y, en conse- cuencia, 6 y el ángulo QOP ( = 38O) son alternos inter- nos y, por tanto, son iguales. Sustituyendo valores se tiene entonces que
7G = 3.2 m C sen38" = (1.97 m)C
Pero esta cantidad debe ser igual 51 rF = 605.19 m kg
605.19 m kg = (1.97 m)C
y = 900
E s decir, la dirección de H tiene que ser perpendicular a la palanca. En este caso, la expresión (10.25) queda como
TH = rH = 605.19 m kg
Despejamos de aquí H
H = 605.19 m kg r
- - 605.19 m kg - 189,1 kg 3.2 m
~-
La fuerza H con magnitud 189.12 kg, perpendicular a la palanca y con el sentido mostrado en la figura 10.1 3c produce la misma torca (con respecto a O) que
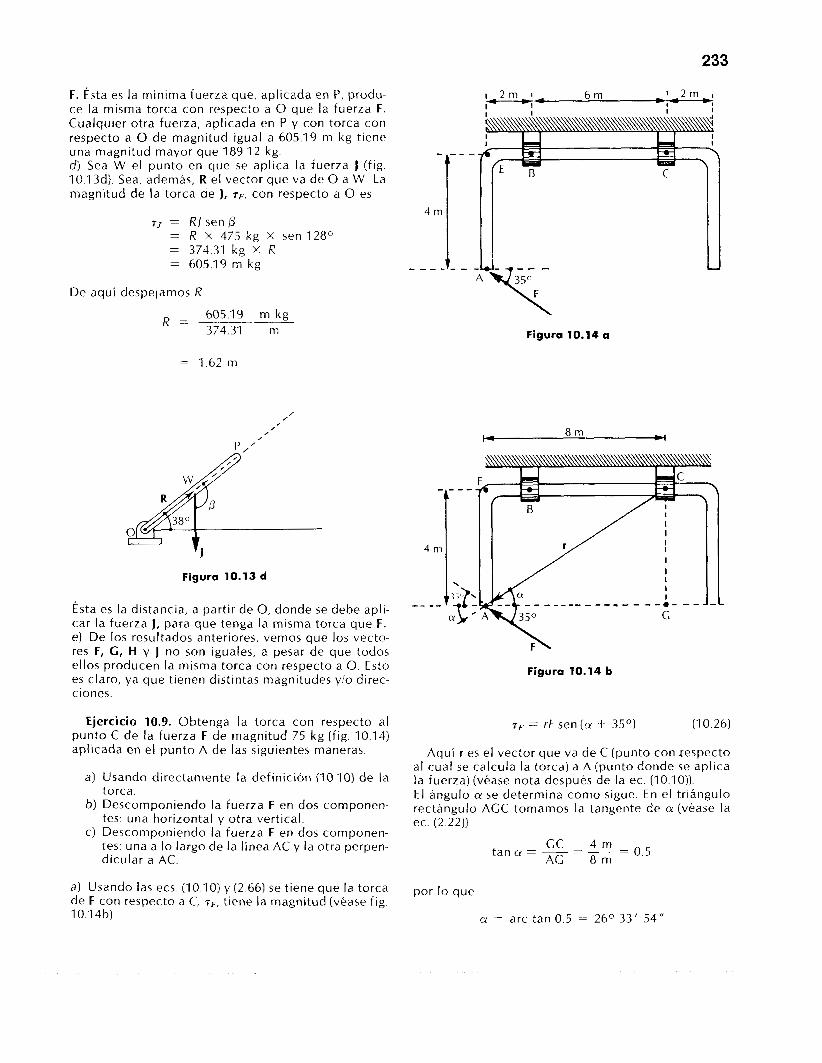
233
F. Ésta es la mínima fuerza que, aplicada en P, produ- ce la misma torca con respecto a O que la fuerza F . Cualquier otra fuerza, aplicada en P y con torca con respecto a O de magnitud igual a 605.19 m kg tiene una magnitud mayor que 189.12 kg. d ) Sea W el punto en que se aplica la fuerza J (f ig 10.13d). Sea, además, R el vector que va de O a W. La magnitud de la torca de 1, T ~ , con respecto a O es
75 = R/ seni3 4 m
= R X 475 kg X sen 128O = 374.31 kg X U = 605.19 m kg ”””
De aquí despejamos R
R = 605.19 m kg 374.31 m
= 1.62 m
Figura 10.13 d
ÉSta es la distancia, a partir de O, donde se debe apli- car la fuerza J , para que tenga la misma torca que F. e) De los resultados anteriores, vemos que los vecto- res F, G , H y J no son iguales, a pesar de que todos ellos producen la misma torca con respecto a O. Esto es claro, ya que tienen distintas magnitudes y/o direc- ciones.
Ejercicio 10.9. Obtenga la torca con respecto al punto C de la fuerza F de magnitud 75 kg (fig. 10.14) aplicada en el punto A de las siguientes maneras.
a) Usando directamente la definición (10.10) de la torca.
b) Descomponiendo la fuerza F en dos componen- tes: una horizontal y otra vertical.
c) Descomponiendo la fuerza F en dos componen- tes: una a lo largo de la línea AC y la otra perpen- dicular a AC.
a) Usando las ecs. (10.10) y (2.66) se tiene que l a torca de F con respecto a C, T ~ , tiene la magnitud (véase fig. 10.1 4bj
\ Figura 10.14 a
F\
Figura 10.14 b
T~ = rF sen (CY + 35O) (10.26)
Aquí r es el vector que va de C (punto con respecto al cual se calcula la torca) a A (punto donde se aplica la fuerza) (véase nota después de la ec. (10.10)). E l ángulo CY se determina como sigue. En el triángulo rectángulo ACC tomamos la tangente de CY (véase la ec. (2.22))
por lo que
CY = arc tan 0.5 = 26O 33‘ 54”
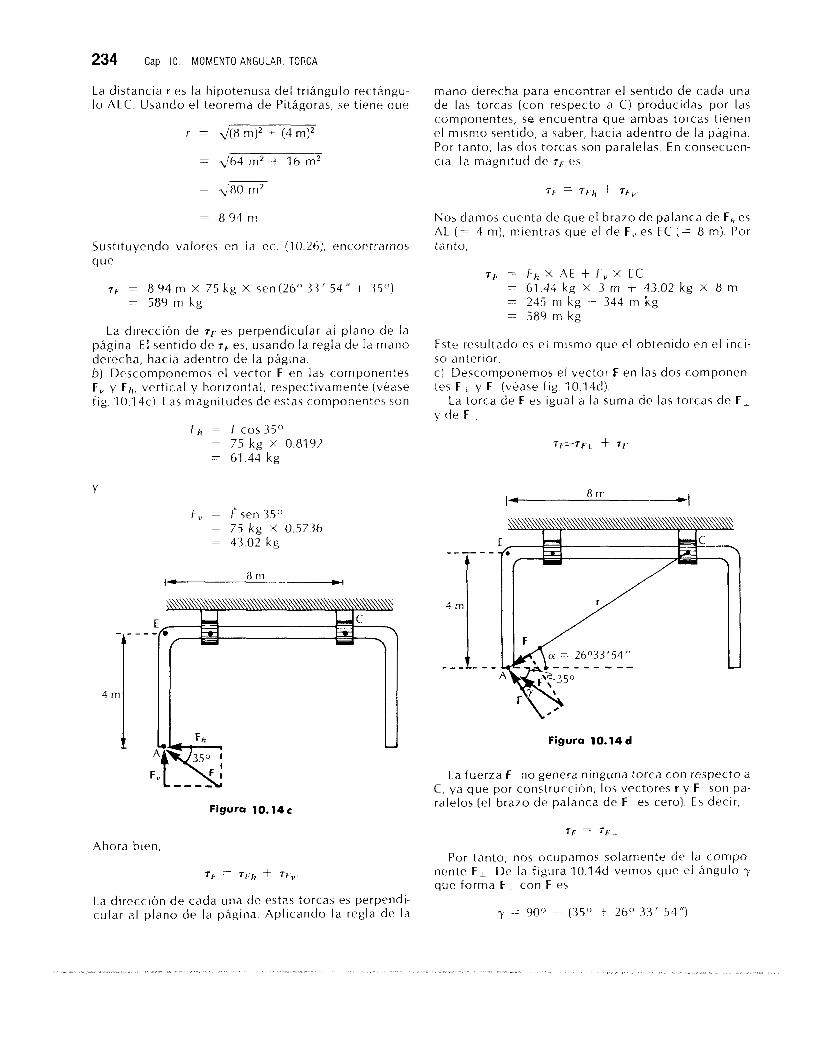
234 Cap. 10 MOMENTO ANGULAR. TORCA
La distancia res la hipotenusa del triángulo rectángu- lo AFC Usando el teorema de Pitágoras, se tiene que
r = J’(8 m12 + (4 m)*
= 4‘64 m2 + 16 m*
= ~ ‘ 8 0 m2 -
= 8 94 m
Sustituyeqdo valores en la e<:. (10.26), encontramos qup
71; = 8.94 m X 75 kg X sen (26” 3 3 ’ 54” + 3 S 0 )
= 589 m kg
La dirección de rF es perpendicular al plano de la phgina E I sentido de r F es, usando la regla de la mano derecha, hacia adentro de la página. b) Descomponemos el vector F en las componentes F, y Fh, vertical y horizontal, respectlvamente (véase t ig 10 .14~) . Las magnitudes d~ estas componentes 5on
4 m
L
F , = Fsen 35” = 75 kg X 0.5736 = 43.02 kg
tr 8 m H
Figura 10.14 c
Ahora bien,
rF = rph + r e ,
La direccibn de cada una de estas torcas es perpendi- cular al plano de la página Aplicando la rpgla de la
mano derecha para encontrar el sentido de cada una de las torcas (con respecto a C) producidas por las componentes, se encuentra que ambas torcas tienen el mismo sentldo, a saber, hacia adentro de la página. Por tanto, las dos torcas son paralelas. En consecuen- cia, la magnitud de 7J es
rt. = 71.h + TI-”
Nos damos cuenta de que e l brazo de palanca de Fh es AL ( = 4 m), mientras que e l de F , es EC ( = 8 ni). Por tdnto,
T F = Fh X AE + F, X EC = 61.44 kg X 3 m + 43.02 kg X 8 m = 24.5 m kg + 344 m kg = S89 m kg
Este resultado es e l mismo que el obtenido en el inci- so anterior. c) Descomponemos e l vector F en las dos componen- tes F ~ y F (véase fig. 10.14d)
La torca de F es igual a la suma de las torcas de F _ y d e F
T F = T F l + 7 F
””- -
4 m
14 8 m +I
o( = 26O33‘54” “”“-
Figura 10.14 d
La tuerza F no genera ninguna torca con respecto a C, ya que por construcción, los vectores r y F son pa- ralelos (el brazo de palanca de F es cero). E s decir,
rF = rF
Por tanto, nos ocupamos solamente de la compo- nente F I . De la figura 10.14d vemos que el ángulo y que forma F I con F es
7 == 90° - (35O + 26” 3 3 ’ 54”)
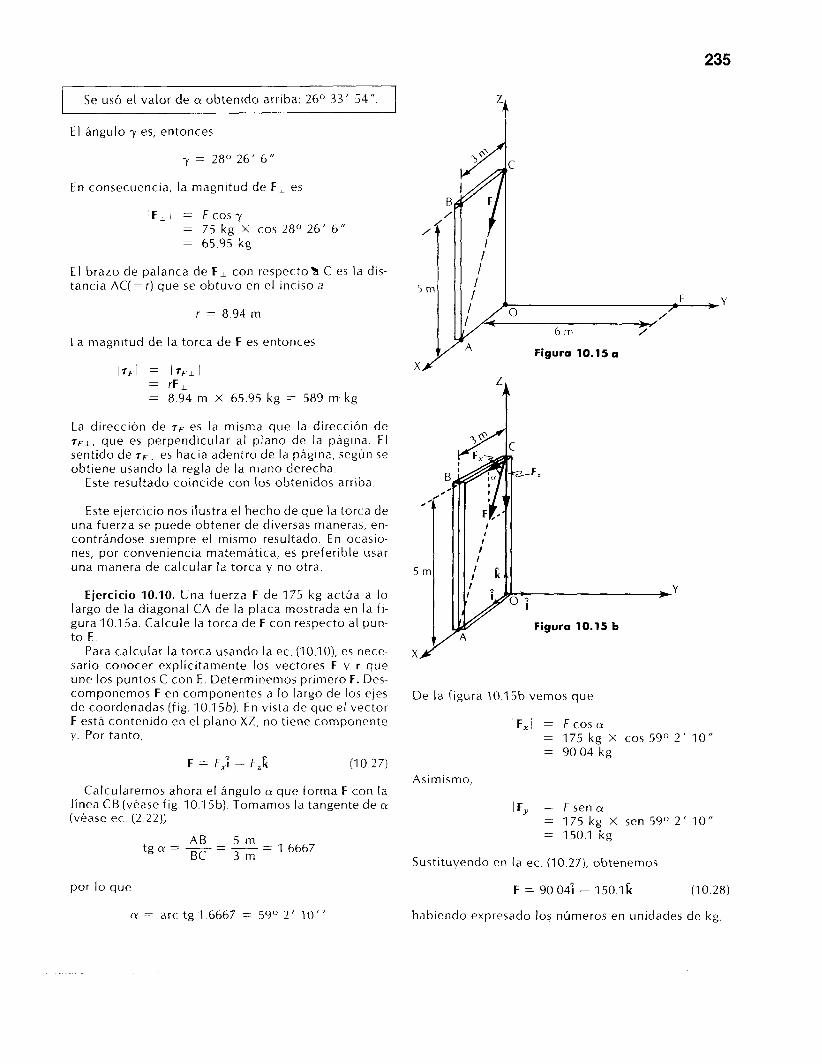
235
Se us6 el valor de a obtenido arriba: 26O 33 ' 54".
E l ángulo y es, entonces
y = 28O 26 ' 6 "
En consecuencia, la magnitud de F , es
I F I / = F c o s y = 75 kg X cos 2 8 O 26' 6 " = 65.95 k g
E l brazo de palanca de F I con respecto% C es la dis- tancia AC( = r ) que se obtuvo en el inciso a
r = 8.94 m
La magnitud de la torca de F es entonces
b F / = / T F l / = rF L = 8.94 m x 65.95 kg = 589 m . kg
La dirección de 7 F es la misma que la direccijn de T ~ ~ , que es perpendicular al plano de la página. E l sentido de r F l es hacia adentro de la página, según se obtiene usando la regla de la mano derecha.
Este resultado coincide con los obtenidos arriba.
Este ejercicio nos ilustra el hecho de que la torca de una fuerza se puede obtener de diversas maneras, en- contrándose siempre el mismo resultado. En ocasio- nes, por conveniencia matemática, es preferible usar una manera de calcular la torca y no otra.
Ejercicio 10.10. Una fuerza F de 175 kg actúa a lo largo de la diagonal CA de la placa mostrada en la fi- gura 10.15a. Calcule la torca de F con respecto al pun- to E .
Para calcular la torca usando la ec. (IO.lO), es nece- sario conocer explícitamente los vectores F y r que une los puntos C con E . Determinemos primero F. Des- componemos F en componentes a lo largo de los ejes de coordenadas (fig. 10.15b). En vista de que el vector F está contenido en el plano XZ, no tiene componente y . Por tanto,
F = Fxi - F,k (10.27)
Calcularemos ahora el ángulo a que forma F con la línea CB (véase fig. 10.15b). Tomamos la tangente de CY
(vkase ec. (2.22))
AB - 5 m BC 3 m
tgCY=---- - 1.6667
por lo que
01 = arc tg 1.6667 = 59O 2 ' I O "
-4 I
/
5 n
7
B .e
I 0
I I I
I I
5rn / ,Y P
Figura 10.15 b
De la figura 10.1 5b vemos que
IFx/ = F c o s a = 175 kg X cos 59" 2 ' I O " = 90.04 kg
Asimismo,
IF,I = Fsencu = 175 kg X sen 59O 2 ' I O " = 150.1 k g
Sustituyendo en la ec. (10.27), obtenemos
F = 90.041 - 150.1 (10.28)
habiendo expresado los números en unidades de kg.
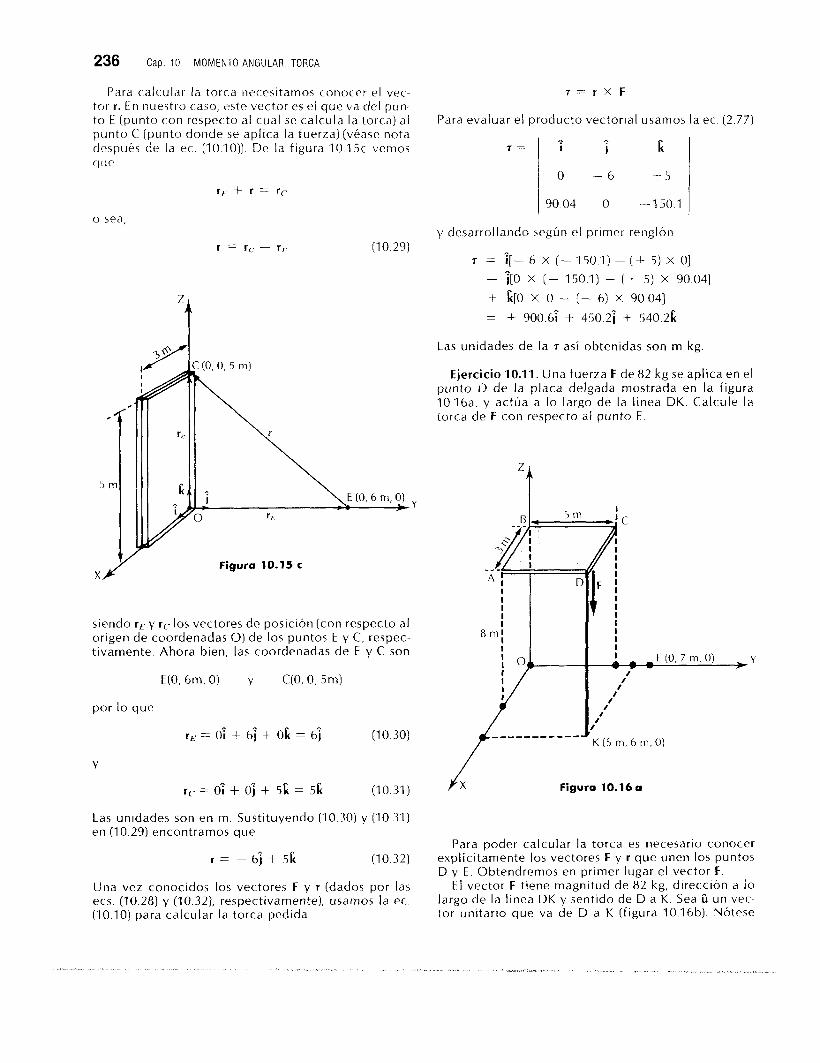
236 Cap. I O . MOMENTO ANGULAR. TORCA
Pdra calcular la torca necesitamos conocPr el vec- tor r. E n nuestro caso, este vector es el que va del pun- to E (punto con respecto al cual se calcula la torca) al punto C (punto donde se aplica la fuerza) (véase nota después de la ec. (10.10)). De la figura 10.15c vemos q u e
rE; + r = rc
o sea
T = r X F
Para evaluar el producto vectorial usamos la ec. (2.77) - ..
7 = I I C 0 - 6 + S
90 04 0 -1 50.1
y desarrollando según el primer renglón
7 i[- 6 X ( - ISO.l] - ( + 5) X O] - ;[O X ( - 1.50.1) - ( + S) X 90.041 + &[O X 0 -. ( - 6) X 90.043 = + 900.61 + 450.21 + 540.2k
r = rc - rr (10.29)
zt Las unidades de la T así obtenidas son m kg
Ejercicio 10.11. Una fuerza F de 82 kg se aplica en el punto D de la placa delgada mostrada en la figura 10.16a, y actúa a lo largo de la línea DK. Calcule la torca de F con respecto al punto E.
't
siendo rE y rc los vectores de posición (con respecto al origen de coordenadas O) de los puntos E y C, respec- tivamente. Ahora bien, las coordenadas de E y C son
E(0,6m, 0) y C(0, 0 , Sm)
por lo que
rE = 0: + 6; + 0k = 61 (1 0.30)
Y
rc = 0; + 0; + 5C = 5k (10.31) Figura 10.16 a
Las unidades son en m. Sustituyendo (10.30) y (10.31) en (10.29) encontramos que
Para poder calcular la torca es necesario conocer r = -6; + SE (10.32) explícitamente los vectores F y r que unen los puntos
Una vez conocidos los vectores F y r (dados por las E l vector F tiene magnitud de 82 kg, dirección a lo ecs. (10.28) y (10.32). respectivamente), usamos la ec. largo de la línea DK y sentido de D a K . Sea un vec- (10.10) para calcular la torca pedida tor unitario que va de D a K (figura 10.16b). Nótese
D y E . Obtendremos en primer lugar el vector F .
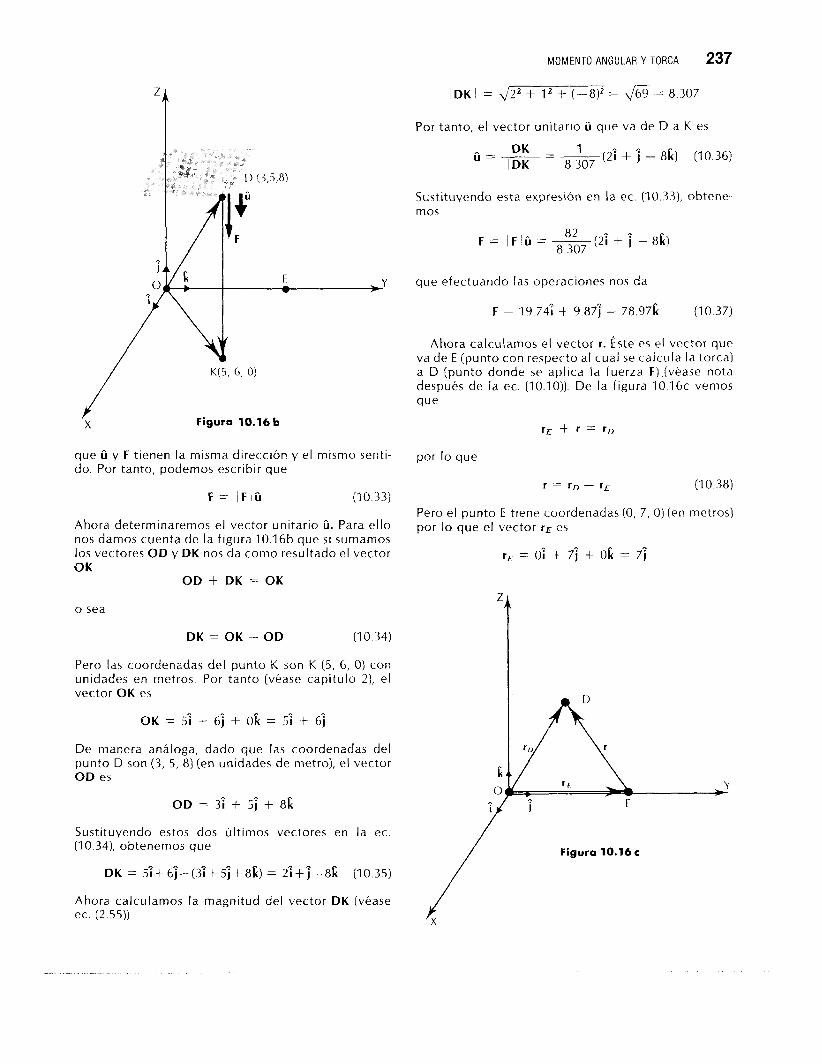
MOMENTO ANGULAR Y TOHCA 237
X
I
Figura 1 O. 16 b
que ir y F tienen la misma dirección y el mismo senti- do. Por tanto, podemos escribir que
F = I F l B (10.33)
Ahora determinaremos el vector unitario ir. Para ello nos damos cuenta de la figura 10.16b que s i sumamos los vectores OD y DK nos da como resultado el vector OK
OD + DK = OK
o sea
DK = OK -- OD (1 0 34)
Pero las coordenadas del punto K son K (5, 6, O) con unldades en metros. Por tanto (véase capitulo 2), el vector OK es
OK = 51 + 61 + Ok = 51 + 61
De manera análoga, dado que las coordenadas del punto D son (3, 5, 8) (en unidades de metro), el vector OD es
OD = 31 + 5; + 8[;
Sustituyendo estos dos últimos vectores en la ec. (10.34), obtenemos que
DK = 51+6;--(31+57+8/;) = 2?+;-8[; (10.35)
Ahora calculamos la magnitud del vector DK (véase ec. (2.55))
IDKi = d22 + l 2 + (-8j2 = 8.307
Por tanto, el vector unitario u que va de D a K es
a DM - ”=”- /DKl 8.307 ’ (21 + ; - 8k) (10.36)
Sustituyendo esta expresión en la ec. (10.33), obtene- mos
que efectuando las operaciones nos da
F = 19.741 + 9.877 - 78.97k (10.37)
Ahora calcularnos el vector r . Éste es el vector que va de E (punto con respecto al cual se calcula la torca) a D (punto donde se aplica la fuerza F).(v(?ase nota después de la ec. (10.10)). De la f igura 10.16~ vemos que
rE + r = r D
por lo que
I = rD - rE (1 0.38)
Pero el punto E tlene coordenadas (O, 7, O) (en metros) por lo que el vector rE e5
/ Figura 10.16 c
i

238 Cap. I O . MOMENTO ANGULAR. TORCA
Además, el vector ru = OD, arriba obtenido
OD = 37 + 5; t 8c
Sustituyendo estas dos illtimas ecuaciones c r t l a P C (10.38) obtenemos que
r = (37+Sl+Sk) - 7; = 37 - 2; + 8k (10 39)
Una vez conocidos los vectores F y r (dados por las c'cs (10.37) y (10.39), respectivamente), podemos cal- cular la torca de F con Irespecto a E usando la ec. (10.10) y la expresihn ( 2 77) para evaluar el producto vectorial ,.
7 = r X F = i
Desarrollando según el primer renglón encontramos que
7 = I[( - 2) X ( - 78.97) - ti x 9.871 ,. - j13 x I - 78.97) - 8 x 19.741 + c[3 X 9.87 -- ( - 2) X 19.741
= 791 + 3951 + 69G
en unidades de m kg
10.2. M O M E N T O A N G U L A R DE UN SlSTEMA DE PARTíCULAS
Consideremos ahora un sistema de N particulas (fig. 10.17) de masas m,, m2, , mi , mN, con velocida- des vl, vZr , vi, , vN y vectores de posición rl, r2, , ri, , rN, respectivamente. Aquí los vectores de posición están referidos a un sistema de coordena- das con origen O, escogido de antemano. E l momento de la i-ésima partícula es
pi = mivi (i = 12, ,N) (10.40)
t .N
3.
Figura 10.17
De manera análoga a la definición (10.2), definimos el momento angular i i de la i-ésima partícula con res- pecto al origen O como el producto vectorial de su vector de posición r i con su momento pi
li = r i X pi (i = 1,2, .,N) (10.41)
Siguiendo un procedimiento idéntico a como se llegó a la ec ( lO . I l ) , se puede escribir para cada uno de los momentos angulares I; la siguiente ecuación
(10.42)
(i = 1,2, ,N)
siendo Fi la fuerza que experimenta la partícula i, y 7i la torca de esta fuerza con respecto al origen O.
Ahora bien, como se estudió en el capítulo 9, cuando se tiene un sistema de partículas, la fuerza que experi- menta cada una de las partículas tiene dos contribu- ciones, una de origen interno y otra de origen externo, según nos indica la ec. (9 13). Sustituyendo esta úl t lma pcuacibn en la ec. (10.42) se obtiene
" I - ri X (Fijinr,+ r i X (Fi)ext. (10.43) d t
(i = 1,2, ,N)
En seguida sumemos, miembro a miembro, cada una de las ecuaciones (10.43)
Hay que darse cuenta de que la ec. (10.$3) en reali- dad representa N ecuaciones vectoriales. Estas se ob- tienen sustituyendo el índice i por cada uno de los ín- dices 1,2, ,N.
(10.44)
Consideremos por separado cada uno de los dos miembros de esta ecuación. L I miembro lzqulerdo se puede escribir como sigue
(10 45)
La suma de derivadas es igual a la derivada de la suma (véase ec. (3.20))
Definrmos el momento angular total I. del sistema de partículas con respecto al punto 0 como la suma de los

MOMENTO ANGULAR DE UN SISTEMA DE PARTiCULAS 239
momentos angulares (con respecto al mismo punto O) de todas las partículas que forman el sistema
L = li (1 0.46)
En consecuencia, el miembro izquierdo de la ec. (10.44) queda como
N
i = t
(10.47)
Tratemos ahora el miembro derecho de la ec. (10.44). E l primer sumando (el que contiene las fuerzas inter- nas) lo podemos escribir como
F1 , y r12 tienen la misma dirección. Por tanto, la expre- sión (10.49) es el producto vectorial de dos vectores que tienen la misma dirección. En consecuencia, su valor es cero (véase sección 2.6). E s decir, la suma
rl X F , , + r, X F,, = O (1 0.50)
Nos damos cuenta de que en la expresión (10.48) aparecen sumas de parejas del tipo (10.50). De la mis- ma forma que ocurre para la pareja (1,2), la suma de cada pareja se anula, y por tanto, la suma (10.48) es cero. Es decir,
i=t (10.51)
f: T i X (Filint. = r l X (FJint. + r2 X (Fzlint. + E l sumando restante en el miembro derecho de la i=l ec. (10.44) es la suma de las torcas externas (con res-
y usando la expresión (9.12) para las fuerzas internas pecto a O) aplicadas a cada una de las partículas se tiene que f: X (FiIexf.= 2 (7 i )ext .= rext. (10.52) 2 T i X (Filint.
i=l que es la torca externa total aplicada al sistema. Susti-
i=t i=l
= rl x ( F l , 2 + F1 ,3 + f F1.N) tuyendo los resultados (10.47). (10.51) y (10.52) en la ec (10.44) obtenemos que + r2 x ( F Z , l + F2 ,3 + . + F2.N) + r3 X (F3,1 + F3,z + . . . + F3,N)+ . .
= rl X Fl,2 + r , X Ft,3 + . . + rl X F1,N r2 X F2,, 4- r, X F2,3 + . . + r2 X FZ.N
f r3X F , , + r 3 X F3,2 + . . . + 13 X F3,N + . . (1 0.48)
Consideremos ahora dos de los sumandos que apare- cen en esta suma:
r l x F l , Y r 2 x F2,
Usando la tercera ley de Newton para las dos fuerzas que aparecen
F2 , = - F,,
se tiene que
y sacando F,, como factor común, esta suma queda como
siendo
el vector que va de la partícula 2 a la partícula 1 (véa- se fig. 10.18). Ahora bien, dado que la fuerza F , , que la partícula 2 ejerce sobre la partícula 1 tiene la direc- ción de la línea que une a las dos partículas, entonces
(10.53)
E l cambio del momento angular total de un sistema de partículas arbitrario es causado solamente por la aplicación de una torca externa al sistema. Las torcas de origen interno NO tienen ningún efecto sobre el momento angular total. Este resultado es análogo al obtenido en el capítulo 9 para el momento lineal total del sistema, en que las fuerzas de origen interno no cambian el momento lineal total.
S i sobre un sistema de partículas se aplican fuerzas externas, entonces simultáneamente la fuerza externa total cambia el momento l ineal total y la torca exter- na (causada por las fuerzas externas) modif ica el mo- mento angular total del sistema.
Supongamos el caso en que la torca externa total rex-. sea cero
7ext.= 0 (10.54)
t
Figura 10.18
.. . . .
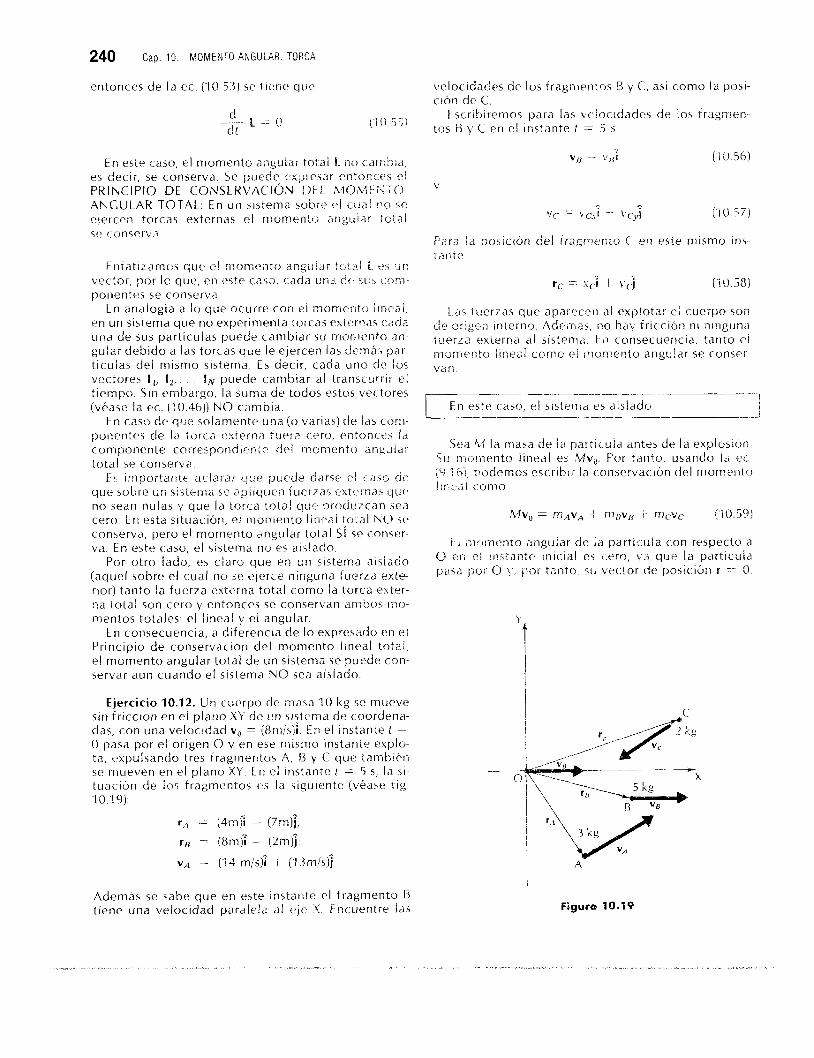
240 Cap. I G . MOMENTO A ~ G U L A R . TORCA
entonces de la ec. (10 53) se Ilene que
d d t " h L () (1 o 555:
t n este caso, el momento dagular totai h no c,amk;lcl, es decir, se conserva. S e puedth t:xp:il'esar entonces t'i
ANGULAR TOTAL: En un slstema sobre el Luzil no se ejercen torcns externas e l momentc; a ~ g t r i a r totai se conserv.?.
PRINCIPIO DE CONSEKL'ACI6N DEL MOM::pJTO
Enfatirarnos que el r n o m c > n r o ang,uicir t:,t*.li i_ t l - . IJr)
vector, por Io que, ei: este cara, cada cnd de ~ v m - ponentes se conwrvd
En analogía a lo que acurre c o n ei momeniu í~r :ec~i , en un sistema que no experimenta torcas ex i rmas cdda u r ~ a de sus partículas puede cambiar su rnor:lento an- gular debido a las torcas que íe ejercen Ids demás par ticulas del mismu sistema E s decir, cada uno de ¡os vectores I,, I , . Irv puede cambiar al transcurrir cl t iempo. S i n t,mbargo, la suma de todos estos vec-tores (véase la ec. (:O.&)) NO cambia.
En caso de que solamente una (o varias) de la5 coni- ponentes de i d torca externa fuerz cero, entonces Id componente corresi,ondil.r-ii~: del momento angtildr total s e conserva P. irrlportartte ..lclarsr ~ 4 ~ : o puede darse P I c.;j.jo dc, que sobre urr sistefr j<i st' ,~p i iq ! r t~ ; l fuerz,?~ t'x1t:rnas que. no sean nulas y que la to !ca rota1 que produzcan sea cero t .n esta situación, el morrrento lineal total N O se conserva, pero el momento angular tota! S Í se cnnser- va. En este caso, el sistema no es ais!ado.
Por o t ro lado, e5 claro que en t ; n sistema aislado (aquel sobre el cual nc se ejerce ninguna fuerza exte- rior) tanto la fuerza externa total como l a torca exter- na totdl son cero y entonces se conservan ambo.; mo rnentos totales: el lineal y e¡ angular.
En consecuencia, a diferencia de lo expresado en e l Principio de conservacion del momento iineal totai, el momento angular total de un sistema se puede c3n- servnr aun cuando el sistema NO sea aislado.
Ejercicio 10.12. Un cuerpo de ma5a 10 kg se mueve sin fricción en el (oldno x\i d r í.In s ~ i t u m a de coordena- das, con una velocidad vo =: (8mis)i. En ei instante t = 0 pasd por el origen O y en ese mismo instante explo- ta. expulsando tres fragmentos A , t3 y O que tamhien se mueven en el plano XY. En el instante t = 5 S , la si- tuación de i o 5 fragmentos es la siguiente (véase rig .lo.? 9):
rA = (4rn$ - (7rn)i,
= (8mii' - urn$. vA =. (14 mis$ + (1 3m,'sfi
Además se sabe que en este instante t'l fragmento B tiene una velocidad paralelJ al eje X Fncuentre
velocidades de los fragnlentos 3 y C, así como la posi- ción de C
Escribiremos para las \e:iocidades de los tragmen tos B y C en el instante t = i S
I
i 1
I A
Figura 10.19

MOMENTO ANGULAR DE UN SISTEMA DE PART~CULAS 241
En consecuencia, usando la ec. (10.46) podemos escri- bir la conservación del momento angular como
Y
rB X mBVB = IOVBG (1 0.66)-
r X Mv, = O = rA X mAvA + rB X mBvB + rc X mCvC (1 0.60) rc X mcvc = 2(xcvc,,- ycvCx)G [ I 0.67)
Por tanto, sustituyendo las expresiones (10.65H10.67) Por otro lado, dado que no se ejercen fuerzas exter- en la ec,
nas sobre el sistema, su centro de masa se mueve todo el tiempo con la misma velocidad (véase capítulo 9, ec. (9.119)). En vista de que inicialmente (en t = O) la
Pero esta posición debe coincidir con el centro de masa de los tres fragmentos mostrados en la figura 10.19. = (52 + 2xcF + ( - 31 + 2ycfi Usando la ec. (9.26) para l a posición del centro de masa, se tiene entonces que al tiempo t = 5 S
= (12; - 217) + (40; - 107) 3- @xc; + 2yc;j
Tomando componentes x, y nos da
M R = mArA + mBrB + mCrC (1 0.62) 400 = 52 + 2 x C (10.69)
Ahora tomaremos las componentes (x,y) de ambos y miembros de la ec. (10.59) (sustituimos los valores nu- méricos dados y no escribimos las unidades para abre- viar)
De esta forma, hemos encontrado las cinco ecua- componente x: Mv, = 10 X 8 = 3 2: 14 + 5vB ciones (10.63), (10.64), (10.68), (10.69j y (10.70) para las
cinco incógnitas xc, yc, vex, v,+ vB. En seguida las rejolveremos en forma simultanea. En primer lugar, + 2vc*
o sea de la ec. (10.64) despejamos I'~-, obteniendo
Mv, =z 80 = 42 + 5vg + 2vcX (10.63)
componente y: O = 3 X 1 3 + 5 X O + 2vcy
- 39 vc,, - --__ - - -19.5 ~ 1 1 s (10.71) 2
o sea De la ec. (10.69) despejamos xc
0 = 39 + 2VCy (1 0.64) 2xc = 400 - 52 = 348
Antes de tomar las componentes de la ec.(10.60) para por l o que el momento angular, calcularemos cada uno de los productos en el miembro derecho. Usando la ec. (2.77) xc = 34812 = 174 m (1 0.72) y las expresiones para ril y vq se tiene que
Ahora, de la ec. (10.71)) despejamos yc ,. I T L /
yc = 31/2 = 15.5 m (10.73)
Sustituyendo los va!ores (10.71)-i10.73) en la ec. (10.68), obtenemos
rAXmAVA 4 "7
42 39 O O i
= ;[(-7)XO-OX39]-;[4XO-O X 421 O = 450 + IOVR + 2[174 X (-19.5) - 15.5Vcxl
+ L[4X39-( -7)X42] = 450k (1065)
De la misma forma se puede encontrar que (véase pro- blema 10.24) 1 0 ~ ~ - 31 vCx 6 336 11 0.74)
que es equivalente a
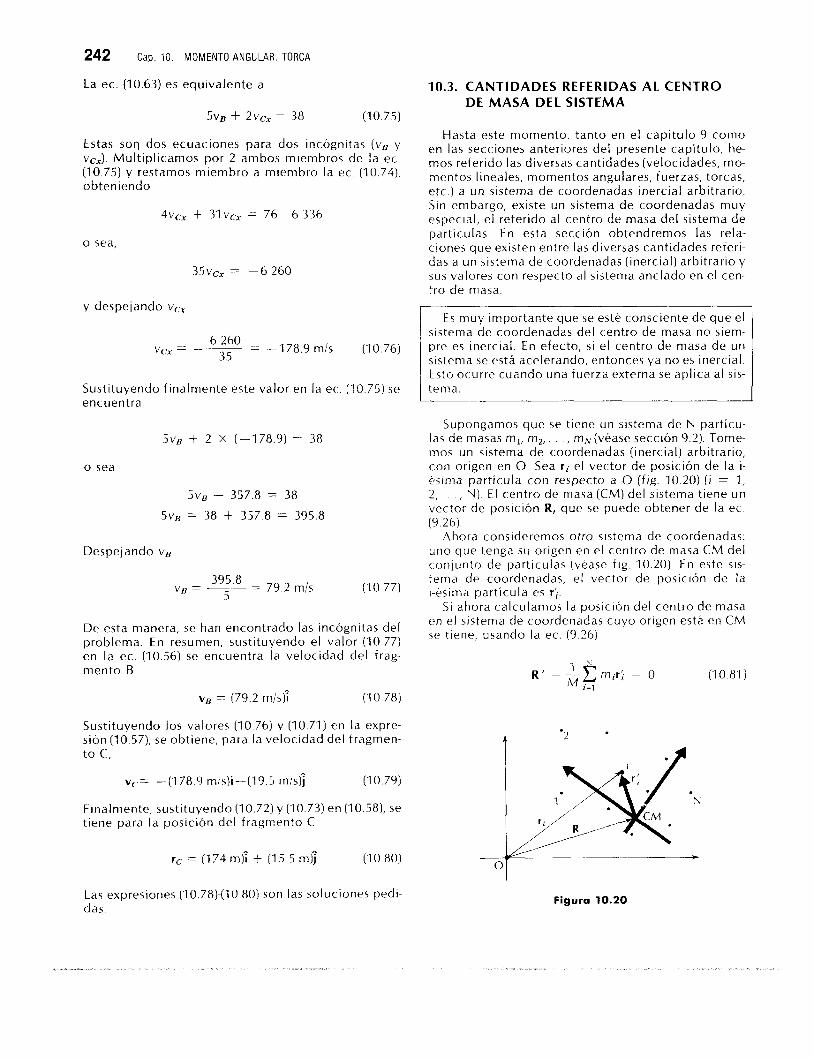
242 Cap. I O . MOMENTO ANGULAR. TORCA
La ec. (10.63) es equivalente a
5vB + 2vcX = 38 (1 0.75)
Estas son dos ecuaciones para dos incógnitas (va y vex). Multiplicamos por 2 ambos miembros de la ec. (10.75) y restamos miembro a miembro la ec (10.74), obteniendo
4vcX + 31 vcX = 76- 6 336
o sea,
35vcX = -6 260
y despejando vcx
vcx = -~ 260 - - -1 78.9 mis (10.76) 3s
Sustituyendo finalmente este valor en la ec. (10.75) se encuentra
SVB + 2 X (-1 78.9) 38
o sea
5va - 357.8 = 38
5vg = 38 + 357.8 = 395.8
Despejando va
395.8 5
vB = ___ = 79.2 mls (10.77)
De esta manera, se han encontrado las incógnitas del problema. En resumen, sustituyendo el valor (10.77) en la ec. (10.56) se encuentra la velocidad del frag- mento B
vB = (79.2 mis$ (1 0.78)
Sustituyendo los valores (10.76) y (10.71) en la expre- sión (10.57), se obtiene, para la velocidad del fragmen- t o C,
., ve= -(178.9 m/s)i-(19.5 m/s)j (10.79)
Finalmente, sustituyendo (10.72) y (10.73) en (10.58), se tiene para la posición del fragmento C
re = (1 74 mf + (I 5.5 mfi (1 0.80)
Las expresiones (10.78)-(10.80) son las soluciones pedi- das
10.3. CANTIDADES REFERIDAS AL CENTRO DE MASA DEL SISTEMA
Hasta este momento, tanto en el capítulo 9 como en las secciones anteriores del presente capítulo, he- mos referido las diversas cantidades (velocidades, mo- mentos lineales, momentos angulares, fuerzas, torcas, etc.) a un sistema de coordenadas inercial arbitrario. Sin embargo, existe un sistema de coordenadas muy especial, el referido al centro de masa del sistema de partículas. En esta sección obtendremos las rela- ciones que existen entre las diversas cantidades referi- das a un sistema de coordenadas (inercial) arbitrario y sus valores con respecto al sistema anclado en el cen- tro de masa.
E 5 muy importante que se esté consciente de que el sistema de coordenadas del centro de masa no siem- pre es inercial. En efecto, s i el centro de masa de un sistema se está acelerando, entonces ya no es inercial. Esto ocurre cuando una fuerza externa se aplica al sis- tema.
Supongamos que se tiene un sistema de N partícu- las de masas m,, m2, . , mN(véase sección 9.2). Tome- mos un sistema de coordenadas (inercial) arbitrario, con origen en O. Sea r i e l vector de posición de la i- ésima partícula con respecto a O (fig. 10.20) (i = 1, 2 , , N). f l centro de masa (CM) del sistema tiene un vector de posición R, que se puede obtener de la ec (9 26).
Ahora consideremos otro sistema de coordenadas: uno que tenga su origen en el centro de masa C M del c.onjunto de partículas (véase fig. 10.20). En este sis- tema de coordenadas, el vector de posición de la i-&¡ma partícula es r;.
Si ahora calculamos la posición del centro de masa en e l sistema de coordenadas cuyo origen está en CM se tiene, usando la ec. (9.26)
4 '2
N
* O
Figura 10.20
, . .

CANTIDADES REFERIDAS AL CENTRO DE MASA DEL SISTEMA 243
E l valor es cero, ya que el centro de masa coincide con el origen del sistema de coordenadas. Aquí M es la masa total del sistema.
La relación de los vectores de posición de la partí- cula ¡ referidos a los dos sistemas de coordenadas es (véase fig. 10.20)
r i = R + r l (1 0.82)
Tomando la derivada con respecto al tiempo en am- bos miembros de esta ecuación, se encuentra que la relación entre las velocidades de esta partícula en los dos sistemas de coordenadas es
v i = v + vi‘ (1 0.83)
Usaremos primas para denotar cantidades referidas al sistema cuyo origen está en el centro de masa. Una cantidad sin prima está referida al sistema de coorde- nadas cuyo origen está en O.
Asimismo, de la ec. (10.83) se tiene para las acelera- ciones
ai = A + a; (1 0.84)
En las ecs. (10.82)-(10.84) R, V y A son los vectores de posición, de velocidad y de aceleración del centro de masa, respectivamente, que están dados por las ecs. (9.26), (9.29) y (9.30), respectivamente.
A continuación calcularemos algunas cantidades dinámicas del sistema de partículas. Empezaremos por la energía cinética del sistema. La energía cinética del conjunto de partículas con respecto a O es la suma de las energías cinéticas de cada una de las par- tículas que componen al sistema. Denotando con la letra KO la energía cinética total del sistema con res- pecto a O, se tiene que (véase ec. (8.24))
K~ = -mivi N 1 2
i= 1 2 (1 0.85)
Ahora sustituirnos la relación (10.83) en (10.85)
E l cuadrado de una suma de vectores a y b es
(a + b)2 = a2 + 2a b + b2 (I 0.86)
por lo que al desarrollar, se tiene
Separamos términos en el miembro derecho. Además, en el primer sumando factorizamos en la suma v2 ya que tiene el mismo valor para cada uno de los suman-
dos. De la misma forma, en el segundo sumando se factoriza V. Así se obtiene que
+ - miv;” N 1
2 i= 1 (1 0.87)
En el segundo miembro la suma se anula. En efecto, tomando la derivada con respecto al tiempo de la ec. (10.81) se tiene que
por lo que N
mivi = O (1 0.88) i= 1
Usando este resultado en la ec. (10.87), nos queda
Aquí se usó la ec. (9.27) para la masa total M del siste- ma. E l segundo término del miembro derecho es la suma de las energías cinéticas de cada una de las par- tículas con respecto al sistema cuyo origen está en el centro de masa. Por tanto, este término es la energía cinética del conjunto de partículas en el sistema del centro de masa, cantidad que denotamos como KCM
(10.89)
Finalmente se tiene, entonces que
KO = - MV2 + KC,, 1 2 (10.90)
Este resultado nos indica que la energía cinética del sistema con respecto a O es igual a la suma de la ener- gía cinética del centro de masa (con toda la masa con- centrada en éI) más la energía cinética del sistema con respecto al centro de masa.
En seguida haremos el mismo tipo de cálculo para el momento angular. Sea Lo el momento angular del sistema con respecto a O (véase ec. (10.46))
Si ahora sustituimos las relaciones (10.82) y (10.83) en (1 0.91), obtenemos

244 Cap. 10. MOMENTO ANGULAR. TORCA
y desarrollando se tiene que
+ rL' X V + rL' X v: )
En el primer sumando sacamos como factor común (R X V); en el segundo sumando sacamos como factor común R a la i;.quierda; en el tercer sumando saca- mos como factor común V a la derecha. Así se en- cuentra que
que en un producto vectorial hay que mantener el orden de los factores, ya que este produc- t o no es conmutativo.
Usando la ec. (9.27) para la masa total M del sistema, y las ecs. (10.81) y (10.88) se encuentra que
N Lo = M R X V + E m i r / X v( (10.92)
i= 1 Pero el segundo término en el miembro derecho e s el momento angular del conjunto de partículas con res- pecto al centro de masa. En consecuencia, la última ecuación la rsodemos escribir como
Lo = M R X V 4- LcM (10.93)
donde
(1 0.94) i= 1
La ec. (10.93) nos dice que el momento angular de u n conjunto de partículas con respecto a un sistema (inercial) arbitrario con origen en O, es igual a la s d m a del mornento angular con respecto a O del centro de masa (como si toda la masa estuviese concentrada en éI) más el momento angular del conjunto de partícu- las con respecto a su centro de masa.
De manera análoga, se puede demostrar para la tor- ca externa que (véase problema 10.30)
y (véase problema 10.31) que
Esta últ ima ecuación no es nada trivial, ya que el sis- tema del centro de masa NO es, en general, un siste- ma inercial. La relación (10.53) que se obtuvo arriba es
solamente válida cuando se evalúan ¡as diferentes cantidades en sistemas de referencia inerciales. Si el sistema de referencia no es inercial, entonces la reia- ción (10.53) ya n o e, válida. Hay, sin embargo. una ex- cepción a esta i i i t ima afirmación: la relación es válida s i el sistema es cl del centro de masa, sea o no iner- cia;.
4 / i
PROBLEMAS
10.1. Demuestre las expresiones (IO 4) y (10.5) 10.2. Demuestre las expresiones (10.12) y (10.13). 10.3. Demuestre a partir de la ec. (10.15) que
r = rF sen 0
(véase fig. 10.21 10.4. Calcule las torcas de las tuerzas F , , F,, F , , F., y F , mostradas en la Iigura 10.21 10.5. Obtenga las direcciones y /os ser;tidos de las torcas con respecto a O, de las fuerzas mostradas en la figura 10.22.
I r , = 8 5 m
Figura 10.21
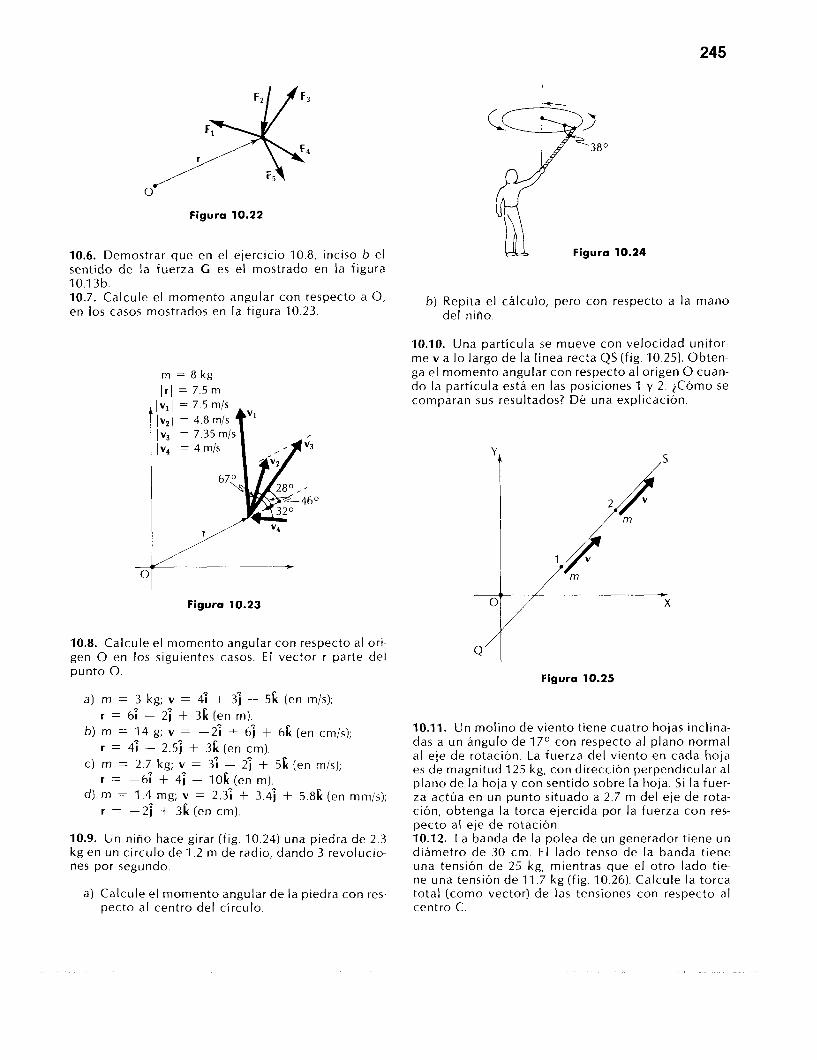
245
Figura 10.22
10.6. Demostrar que en el ejercicio 10.8, inciso b el sentido de la fuerza C es el mostrado en la figura 10.1 3 b. 10.7. Calcule el momento angular con respecto a O, en los casos mostrados en la figura 10.23.
m = 8 k g Ir1 = 7.5 m
Figura 10.23
10.8. Calcule el momento angular con respecto al ori- gen O en los siguientes casos. E l vector r parte del punto o.
a) m = 3 kg; v = 41 + 31 - SC( (en mis);
b) m = 1 4 g; v = -2; + 61 + 6k (en cm/s);
C) m = 2.7 kg; v = 31 - 2; + 5G (en mis);
d) m = 1.4 mg; v = 2.31 + 3.4; + 5.Sk (en mmis);
r = 61 - 21 + 3G (en m).
r = 41 - 2.51 + 3G (en cm).
r = -6; + 4; - IOk (en m).
r = -21 + 3G (en cm).
10.9. Un niño hace girar (fig. 10.24) una piedra de 2.3 kg en un círculo de 1.2 m de radio, dando 3 revolucio- nes por segundo.
a) Calcule el momento angular de la piedra con res- pecto al centro del círculo.
M Figura 10.24
b) Repita el cálculo, pero con respecto a la mano del niño.
10.10. Una partícula se mueve con velocidad unifor- me v a lo largo de la línea recta QS (fig. 10.25). Obten- ga el momento angular con respecto al origen O cuan- do la partícula está en las posiciones 1 y 2. 2CÓmo se comparan sus resultados? Dé una explicación
Figura 10.25
10.11. Un molino de viento t iene cuatro hojas inclina- das a un ángulo de 17O con respecto al plano normal al eje de rotación. La fuerza del viento en cada hoja es de magnitud 125 kg, con dirección perpendicular al plano de la hoja y con sentido sobre la hoja. S i la fuer- za actúa en un punto situado a 2.7 m del eje de rota- ción, obtenga la torca ejercida por la fuerza con res- pecto al eje de rotación. 10.12. La banda de la polea de un generador tiene un diámetro de 30 cm. E l lado tenso de la banda tiene una tensión de 25 kg, mientras que el otro lado tie- ne una tensión de 11.7 kg (fig. 10.26). Calcule la torca total (como vector) de las tensiones con respecto al centro C.
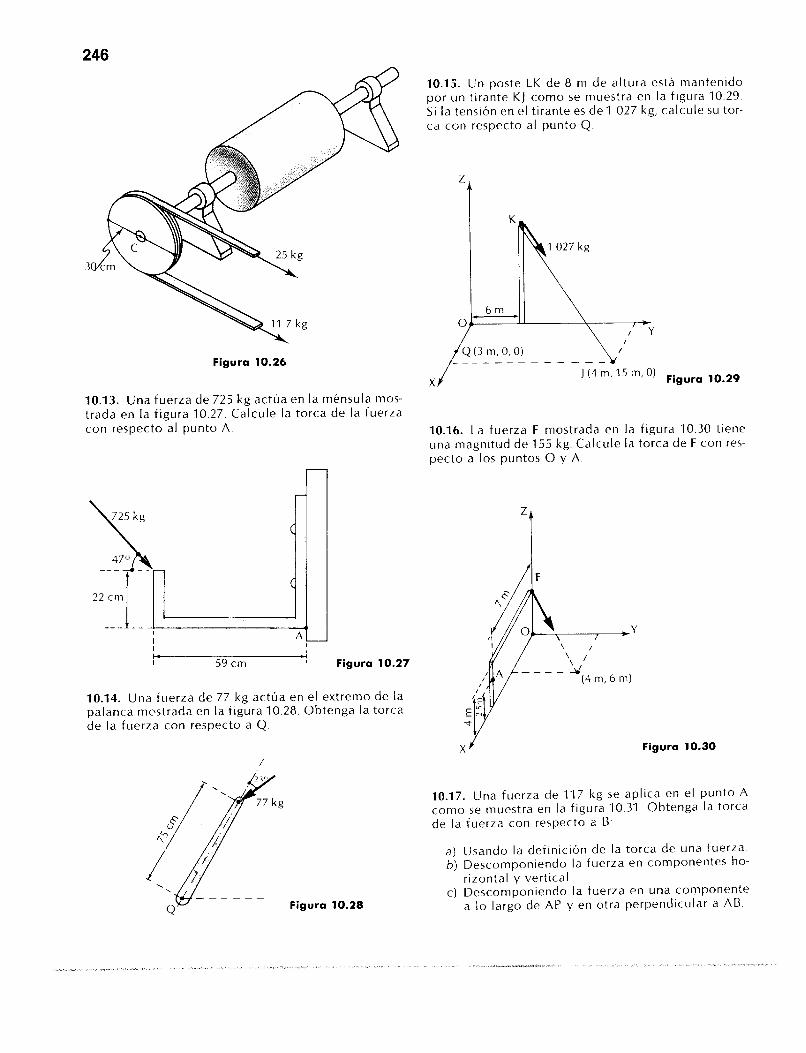
246
\ Figura 10.26
X /
10.15. Un poste LK de 8 m de altura está mantenido por un t irante KJ como se muestra en la figura 10.29. Si la tensibn en el tirante es de 1 027 kg, calcule su tor- ca con respecto al punto Q.
' (4 m' m' O) Figura 10.29
10.13. Una fuerza de 725 kg actúa en la ménsula mos- trada en la figura 10.27. Calcule la torca de la fuerza con respecto al punto A . 10.16. La fuerza F mostrada en la figura 10.30 tiene
una magnitud de 155 kg. Calcule la torca de F con res- pecto a los puntos O y A .
I- r( I 59 cm ' Figura 10.27
10.14. Una fuerza de 77 kg actúa en el extremo de la palanca mcstrada en la figura 10.28. Obtenga la torca de la fuerza con respecto a Q.
"""
Figura 10.28
Figura 10.30
10.17. Una fuerza de 117 kg se aplica en el punto A como se muestra en la figura 10.31. Obtenga la torca de la fuerza con respecto a B-
a ) Usando la definición de la torca de una fuerza. b) Descomponiendo la fuerza en componentes ho-
c) Descomponiendo la fuerza en una componente rizontal y vertical.
a lo largo de AP y en otra perpendicular a AB.
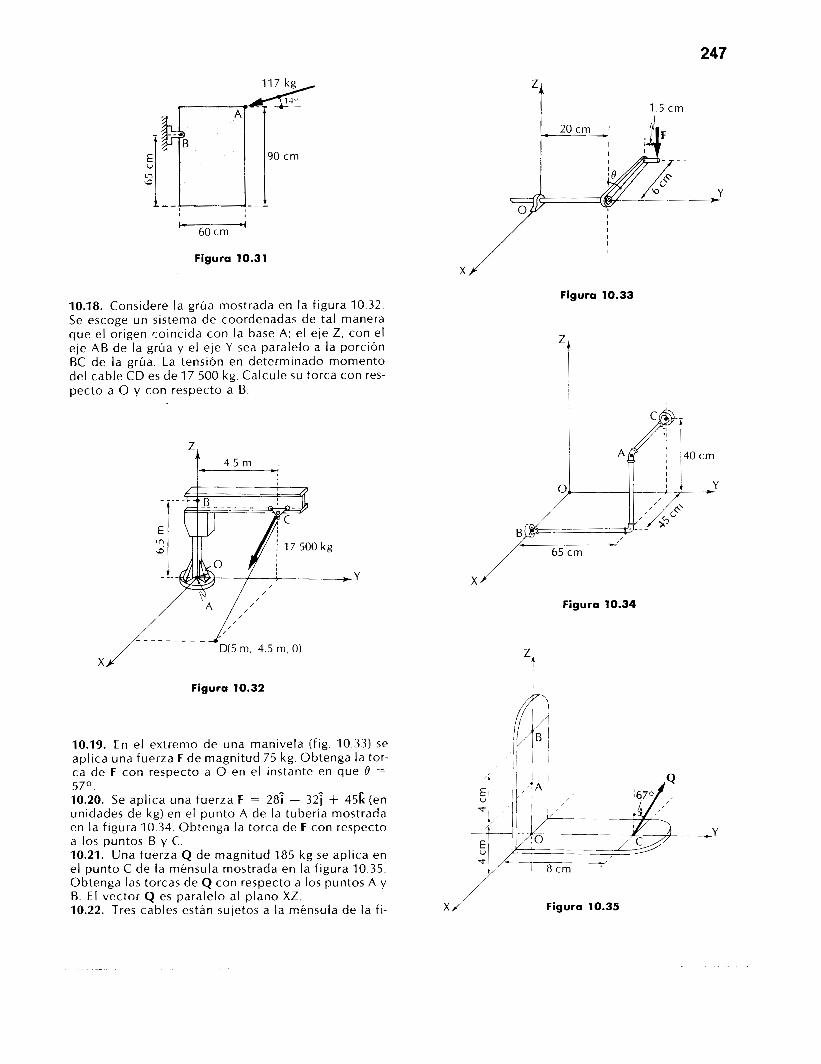
247
60cm
Figura 10.31
90 c m
10.18. Considere la grúa mostrada en la figura 10.32. Se escoge un sistema de coordenadas de tal manera que el origen coincida con la base A; el eje Z, con el eje AB de la grúa y el eje Y sea paralelo a la porción BC de la grúa. La tensión en determinado momento del cable CD es de 17 500 kg. Calcule su torca con res- pecto a O y con respecto a B.
Y
Figura 10.32
10.19. En el extremo de una manivela (fig. 10.33) se aplica una fuerza F de magnitud 75 kg. Obtenga la tor- ca de F con respecto a O en el instante en que 8 = 570. 10.20. Se aplica una fuerza F = 28; - 321 + 45G (en unidades de kg) en el punto A de la tubería mostrada en la figura 10.34. Obtenga la torca de F con respecto a los puntos B y C. 10.21. Una fuerza Q de magnitud 185 kg se aplica en el punto C de la ménsula mostrada en la figura 10.35. Obtenga las torcas de Q con respecto a los puntos A y B. E l vector Q es paralelo al plano XZ. 10.22. Tres cables están sujetos a la ménsula de la fi-
Zt 1.5 cm
J I I I
X
Figura 10.33
X J
Figura 10.34
zi
,Y
X / Figura 10.35
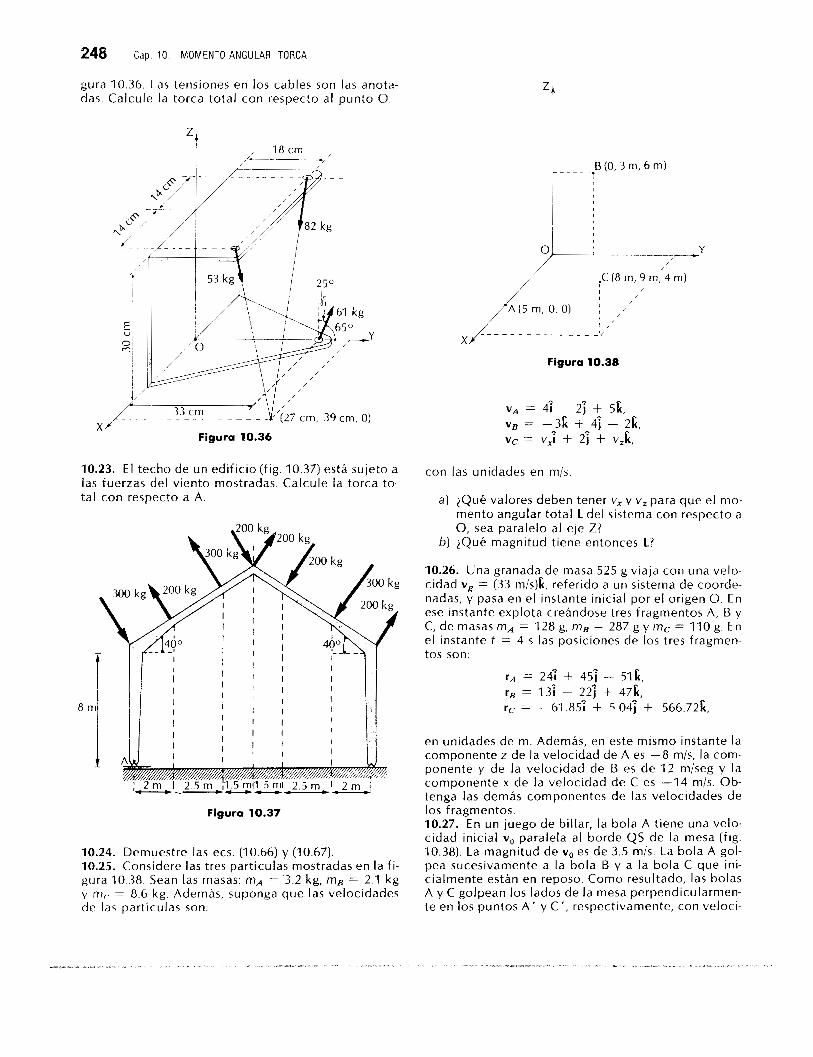
248 Cap. i o . MOMENTO ANGULAR. TORCA
gura 10.36. Las tensiones en los cables son las anota- das. Calcule la torca total con respecto al punto O.
10.23. E l techo de un edificio (fig. 10.37) está sujeto a ias fuerzas del viento mostradas. Calcule la torca to- tal con respecto a A.
Figura 10.37
10.24. Demuestre las ecs. (10.66) y (10.67). 10.25. Considere las tres partículas mostradas en la fi- gura 10.38. Sean las masas: mA = '3.2 kg, mB = 2.1 kg y m,. = 8.6 kg. Además, suponga que las velocidades de las partículas son:
con las unidades en mis.
a) iQué valores deben tener v, y vz para que el mo- mento angular total L del sistema con respecto a O, sea paralelo al eje Z?
b) )Qué magnitud tiene entonces L?
10.26. Una granada de masa 525 g viaja con una velo- cidad vg = (33 m/s)k, referido a un sistema de coorde- nadas, y pasa en el instante inicial por el origen O. En ese instante explota creándose tres fragmentos A, B y C, de masas mA = 128 g, r n B = 287 g y m, = 110 g. En el instante t = 4 S las posiciones de los tres fragmen- tos son:
rA = 24; + 457 - 51G. rB = 13; - 221 + 4 4 , rc = -61 .SS; + 5.04; + 566.72k,
en unidades de m. Además, en este mismo instante la componente z de la velocidad de A es -8 mis, la com- ponente y de la velocidad de B es de 12 m/seg y la componente x de la velocidad de C es -14 mis. Ob- tenga las demás componentes de las velocidades de los fragmentos. 10.27 . En un juego de billar, la bola A tiene una velo- cidad inicial v,, paralela al borde Q S de la mesa (fig. 10.38). La magnitud de vo es de 3.5 mis. La bola A gol- pea sucesivamente a la bola B y a la bola C que ini- cialmente están en reposo. Como resultado, las bolas A y C golpean los lados de la mesa perpendicularmen- te en los puntos A ' y C ', respectivamente, con veloci-
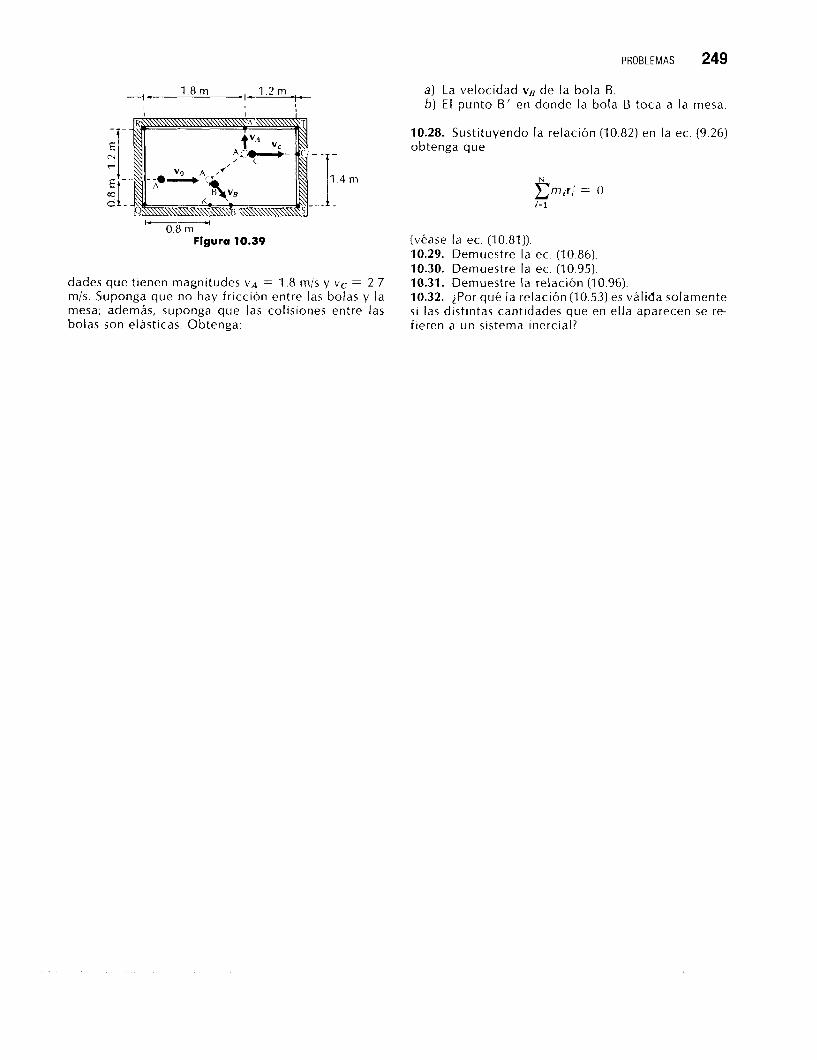
PROBLEMAS 249
"
7
q- o -
1 4 1 . 8 m _ , . 1 . 2 m _ ,
1 . I !
0.8m Figura 10.39
1 . 4 m
"
a) La velocidad vn de la bola B. b) E l punto 6' en donde la bola B toca a la mesa.
10.28. Sustituyendo la relación (10.82) en la ec. (9 26) obtenga que
(véase la ec. (10.81)). 10.29. Demuestre la ec. (10.86) 10.30. Demuestre la ec. (10.95).
dades que tienen magnitudes VA = 1.8 mis y vc = 2.7 10.31. Demuestre la relación (10.96). mis. Suponga que no hay fricción entre las bolas y la 10.32. >Por qué la relación (10.53) es válida solamente mesa; además, suponga que las colisiones entre las s i las distintas cantidades que en ella aparecen se re- bolas son elásticas. Obtenga: fieren a un sistema inercial!
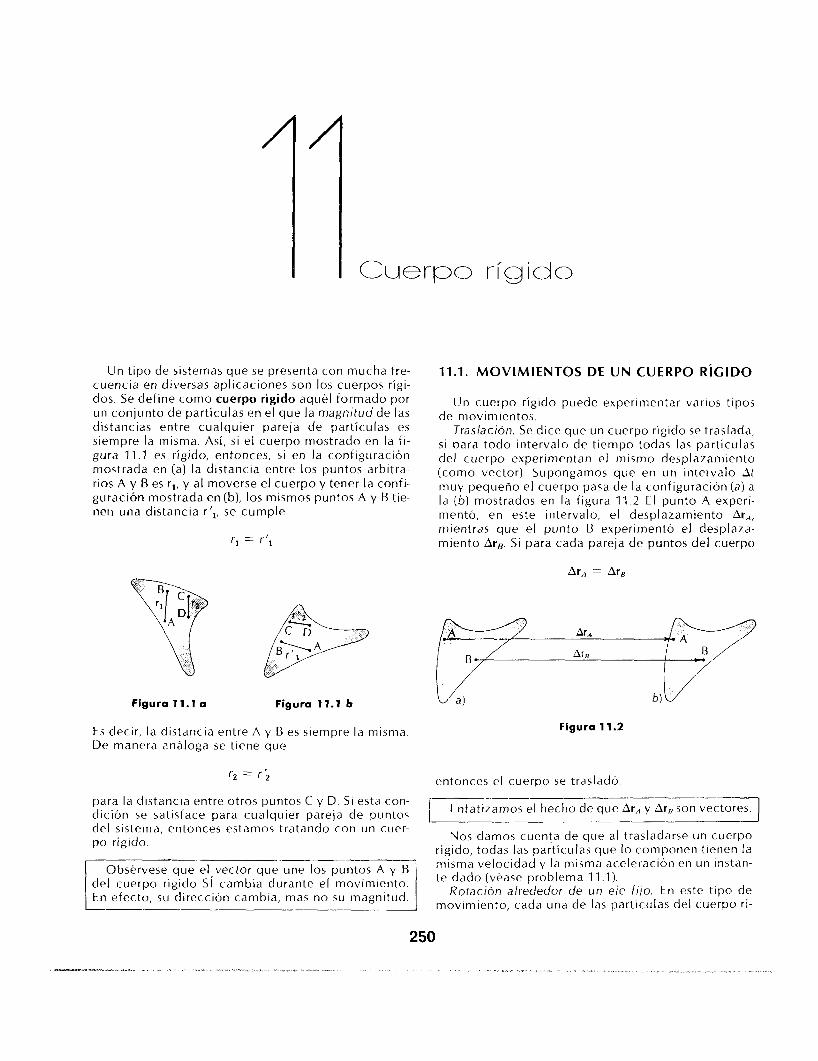
11 Cuerpo r i g i d o
Un t ipo de sistemas que se presenta con mucha fre- cuencia en diversas aplicaciones son los cuerpos rígi- dos. Se define como cuerpo rígido aquél formado por un conjunto de partículas en el que la magnitud de las distancias entre cualquier pareja de partículas es siempre la misma. Así, si el cuerpo mostrado en la fi- gura 11.1 es rígido, entonces, s i en la configuración mostrada en (a) la distancia entre los puntos arbitra- rios A y B es rl, y al moverse el cuerpo y tener la confi- guración mostrada en (b), los mismos puntos A y B tie- nen una distancia rll, se cumple
1 1 . 1 . MOVIMIENTOS DE UN CUERPO RíGIDO
Un cuerpo rígido puede experimentar varios tipos de movimientos.
Traslación. Se dice que un cuerpo rígido se traslada, s i para todo intervalo de tiempo todas las partículas del cuerpo experimentan el mismo desplazamiento (como vector). Supongamos que en un intervalo At muy pequeño el cuerpo pasa de la configuración (a) a la (b) mostrados en la figura 11.2 E l punto A experi- mentó, en este intervalo, el desplazamiento Ar,, mientras que el punto B experimentó el desplara- miento ArB. Si para cada pareja de puntos del cuerpo rl = rfl
Ar, = Ar,
Figura 1 1.1 a Figura 11.1 b
Es decir, la distancia entre A y B es siempre la misma De manera análoga se tiene que
Figura 1 1.2
r2 = r ‘2 entonces el cuerpo se trasladó
para la distancia entre otros puntos C y D. Si esta con- dición se satisface para cualquier pareja de puntos
- Enfatizamos el hecho de que Ar, y
del sistema, entonces estamos tratando con un cuer- po rígido. Nos damos cuenta de que a l trasladarse un cuerpo
rígido, todas las rnartículas que lo componen tienen la Y .
Obsérvese que el,vector que une los puntos A y B del cuerpo rígido SI cambia durante e l movimiento. En efecto, su dirección cambia, mas no su magnitud.
misma velocidad y la misma aceleracion en un instan- te dado (véase problema 11 .I).
Rotacion alrededor de un eje fijo. En este t ipo de - movimiento, cada una de las partículas del cuerpo r i-
250
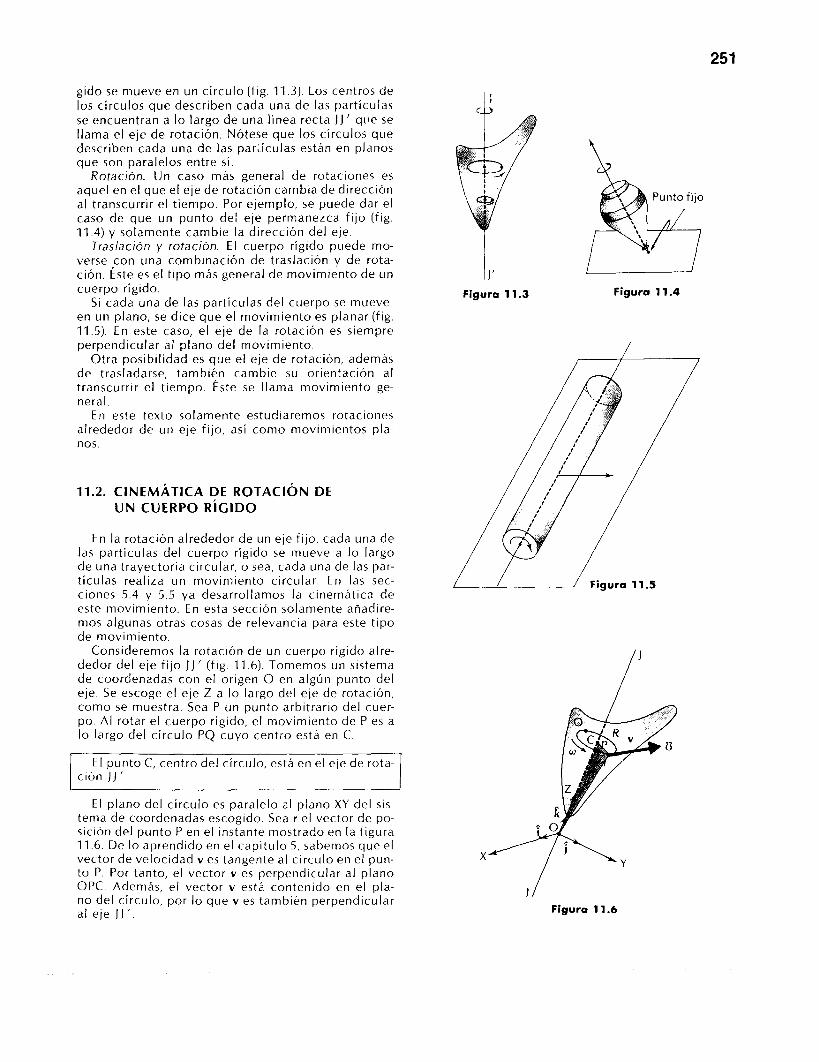
251
gido se mueve en un círculo (tig. 11.3). Los centros de los círculos que describen cada una de las partículas se encuentran a lo largo de una línea recta j j ’ qtle se llama el eje de rotación. Nótese que los círculos que describen cada una de las par,ículas están en planos que son paralelos entre s í .
Rotación. U n caso más general de rotaciones es aquel en el que el eje de rotación cambia de dirección al transcurrir el tiempo. Por ejemplo, se puede dar el caso de que un punto del eje permanezca fijo (fig. 11.4) y solamente cambie la dirección del eje.
Traslación y rotación. E l cuerpo rígido puede mo- verse ,con una combinación de traslación y de rota- ción. Este es el t ipo más general de movimiento de un cuerpo rígido.
Si cada una de las partículas del cuerpo se mueve en un plano, se dice que el movimiento es planar (fig. 11.5). En este caso, el eje de la rotación es siempre perpendicular al plano del movimiento.
Otra posibil idad es que el eje de rotación, además de trasladarse, tambien cambie su orientación al transcurrir el tiempo. Este se l lama movimiento ge- neral.
En este texto solamente estudiaremos rotaciones alrededor de un eje fijo, así como movimientos pla- nos.
11.2. CINEMÁTICA DE ROTACIÓN DE UN CUERPO RIGID0
En la rotación alrededor de un eje fijo, cada una de las partículas del cuerpo rígido se mueve a lo largo de una trayectoria circular, o sea, cada una de las par- tículas realiza un movimiento circular. En las sec- ciones 5.4 y 5.5 ya desarrollamos la cinemática de este movimiento. En esta sección solamente añadire- mos algunas otras cosas de relevancia para este tipo de movimiento.
Consideremos la rotación de un cuerpo rígido alre- dedor del eje f i jo J J ’ (fig. 11.6). Tomemos un sistema de coordenadas con el origen O en algún punto del eje. Se escoge el eje Z a lo largo del eje de rotación, como se muestra. Sea P un punto arbitrario del cuer- po. AI rotar el cuerpo rígido, el movimiento de P es a lo largo del círculo PQ cuyo centro está en C.
E l punto C, cen t rode l i r cu lo , está en el eje de rota- clón J J ‘ I
E l plano del círculo es paralelo al plano XY del sis- tema de coordenadas escogido. Sea r el vector de po- sición del punto P en el instante mostrado en la figura 11.6. De lo aprendido en el capítulo 5, sabemos que el vector de velocidad v es tangente al círculo en el pun- to P. Por tanto, el vector v es perpendicular al plano OPC. Además, el vector v está contenido en el pla- no del círculo, por lo que v es también perpendicular al eje J J ’ .
Figura 1 1.3
B
Figura 1 1.4
/
x
Figura 11.6
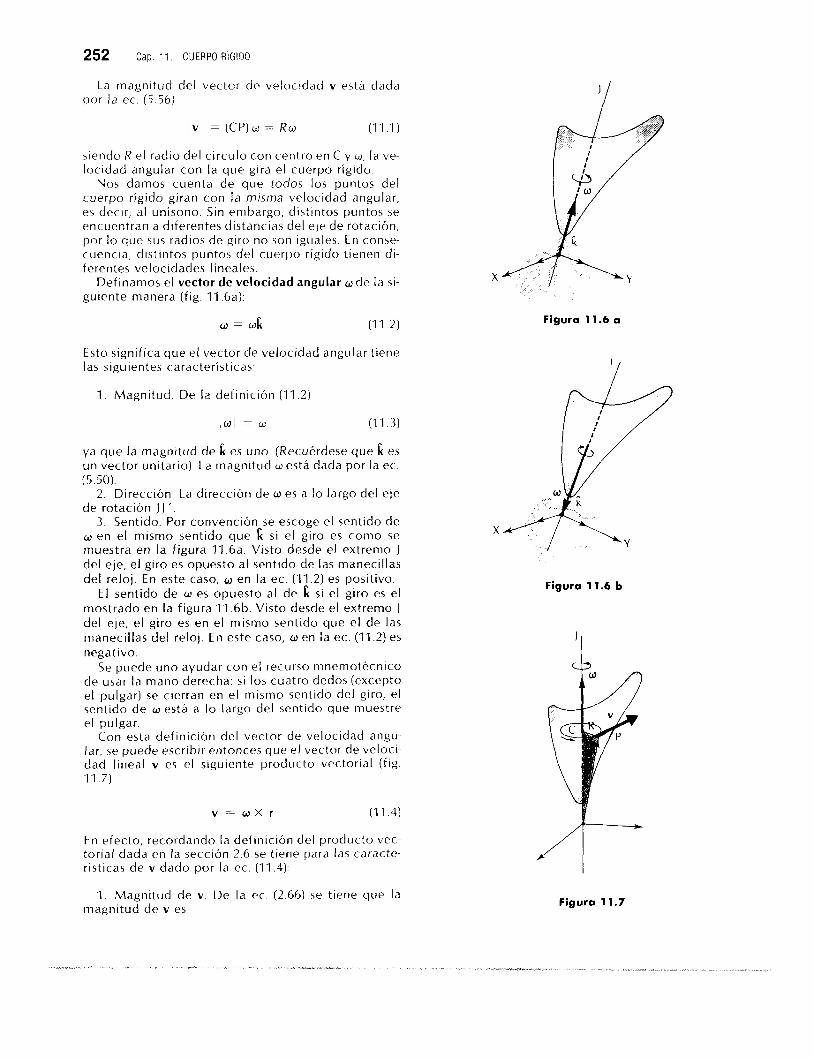
252 Cap. 11 C U E R P O R ~ G I D O
La magnitud del vector de veiocrdad v está dada por la ec. (5.56)
Ivl = (CP), = R o (1 1 .I )
siendo R e l radio del círculo con centro en C y a, la ve- locidad angular con la que gira el cuerpo rígido.
Nos damos cuenta de que todos los puntos del cuerpo rigido giran con la misma velocidad angular, es decir, al unísono. Sin embargo, distintos puntos se encuentrdn a diferentes distancias del eje de rotación, por lo quc sus radios de giro no son iguales. En conse- cuencia, distintos puntos del cuerpo rígido tienen di- ferentes velocidades lineales.
Definamos el vector de velocidad angular w de la si- guiente manera (fig. l l .6aj:
Esto significa que el vector de velocidad angular tiene las siguientes características:
1. Magnitud. De la definición (11.2)
1wl = W (1 1 3 )
ya que la magnitud de i; es uno. (Recuérdese que k es un vector unitario). La magnitud westá dada por la ec. (5.50).
2. Dirección. La dirección de w es a lo largo del eje de rotación 11 ' .
3. Sentido. Por convención se escoge el sentido de w en el mismo sentido que i ; s i el giro es como se muestra en la figura 11.6a. Visto desde el extremo J del eje, el giro es opuesto al sentido de las manecillas del reloj. En este caso, en la ec. (11.2) es positivo.
E l sentido de w es opuesto al de i; si el giro es el mostrado en la figura 11.6b. Visto desde el extremo J del eje, el giro es en el mismo sentido que el de las manecillas del reloj. En este caso, w en la ec. (11.2) es negativo.
Se puede uno ayudar con el recurso mnemotécnico de usar la mano derecha: si los cuatro dedos (excepto el pulgar) se cierran en el mismo sentido del giro, el sentido de westá a lo largo del sentido que muestre el pulgar.
Con esta definición del vector de velocidad angu- lar, se puede escribir entonces que e l vector de veloci- dad lineal v es el siguiente producto vectorial (fig. 11 7 )
v = w X r (1 1.4)
En efecto, recordando la definición del producto vec- torial dada en la sección 2.6 se tiene para las caracte- rísticas de v dado por la ec. (11.4):
1. Magnitud de v. De la ec (2.66) se tiene que la magnitud de v es
'/
Figura 11.6 b
' I
Figura 1 1.7

CINEMÁTICA DE ROTACIÓN DE UN CUERPO RíGIDO 253
l v l = t u l Ir1 sen4 (11.5) mos supuesto que el eje de rotación se mantiene fijo al transcurrir el tiempo. Por tanto,
siendo 4 el ángulo entre w y r. Pero en el triángulo rec- tángulo OCP (fig. 11.7) r (= OP) es la hipotenusa, por 10 que
dt ( I 1 .S))
que es precisamente la ec. (11.1) para la magnitud de la velocidad lineal.
2 . Dirección de v. La dirección del vector v es per- pendicular al plano que fo’rman w y r, es decir, al pla- no OPC. Pero esta dirección es justamente la direc- ción tangencial al círculo en el punto P.
3. Sentido de v. Usando la regla de la mano dere- cha se encuentra que el sentido de v es justamente el mostrado en la figura 11.7.
En resumen, se puede decir que la expresión (11.4) nos da todas las características del vector de veloci- dad lineal v que ya conocíamos.
ducto vectorial (11.4) tienen que mantenerse en el or- den escrito. Recuérdese que el producto vectorial NO es conmutativo.
A continuación escribiremos una expresión para la aceleración lineal del punto P que será muy conve- niente. Para ello sustituimos la ec. (11.4) en la ec. (5.11)
(1 1.7)
Definimos ahora el vector de aceleración angular cu como ,.
a = ak (1 1 .I O)
Este vector tiene magnitud a; dirección a lo largo del eje de rotación 1 I ’; el mism_o sentido que k s i a es po- sitiva y sentido opuesto a k si a es negativa.
Por tanto, se tiene que
(y= - dw dt
(11.11)
Sustituyendo las ecs. (11.11) y (5.7) en la ec. (11.8) se encuentra que
a = a X r + a X v I1 1 .I 2)
Ahora analicemos cada uno de estos sumandos
1. a X r. E t 1 la figura 11.8 se muestran los vectores a y r. Usando la definición de producto vectorial (véa- se la sección 2.61, se encuentra que (Y X r tiene las si- guientes características:
a) Magnitud. De la ec. (2.66) se tiene que
Usando ahora la ec. (10.6) para la derivada de un pro- donde se usó la ec. (11.6). Nótese que tanto (y
ducto (conservando el orden de los vectores), se tiene como w forman el mismo ángulo 4 con r, ya que que a y w tienen la misma dirección (a lo largo del eje
La derivada (dridt) es igual al vector de velocidad v (véase la ec. (5.7)). Consideremos ahora la otra deriva- da que aparece en la ec. (11.8): dw,’dt. Derivando la ec. (11.2) con respecto al tiempo t se tiene que (usamos la ec. (10.6))
” da - d/; d w dt dt dt -a -+-
Pero dkldt = O ya que el vector G es constante, no cambia con el tiempo. Esto úl t imo se debe a que he-
J J ‘1. b) Dirección. a x r es perpendicular al plano que
forman a y r, es decir, es perpendicular al plano O C P (fig. 11.81, y por tanto, tangente al círculo.
c) Sentido. Usando la regla de la mano derecha, se encuentra que a X r tiene el sentido mostrado en la figura 11.8.
Recordando lo aprendido en la sección 5.5, vemos que (Y x r es precisamente la aceleración tangencial a ya que tiene la misma magnitud (véase ec. (5.67)), la misma dirección y el mismo sentido. La aceleración tangencial es tangente al círculo en el punto P
a X r = a (1 1 .I 4)
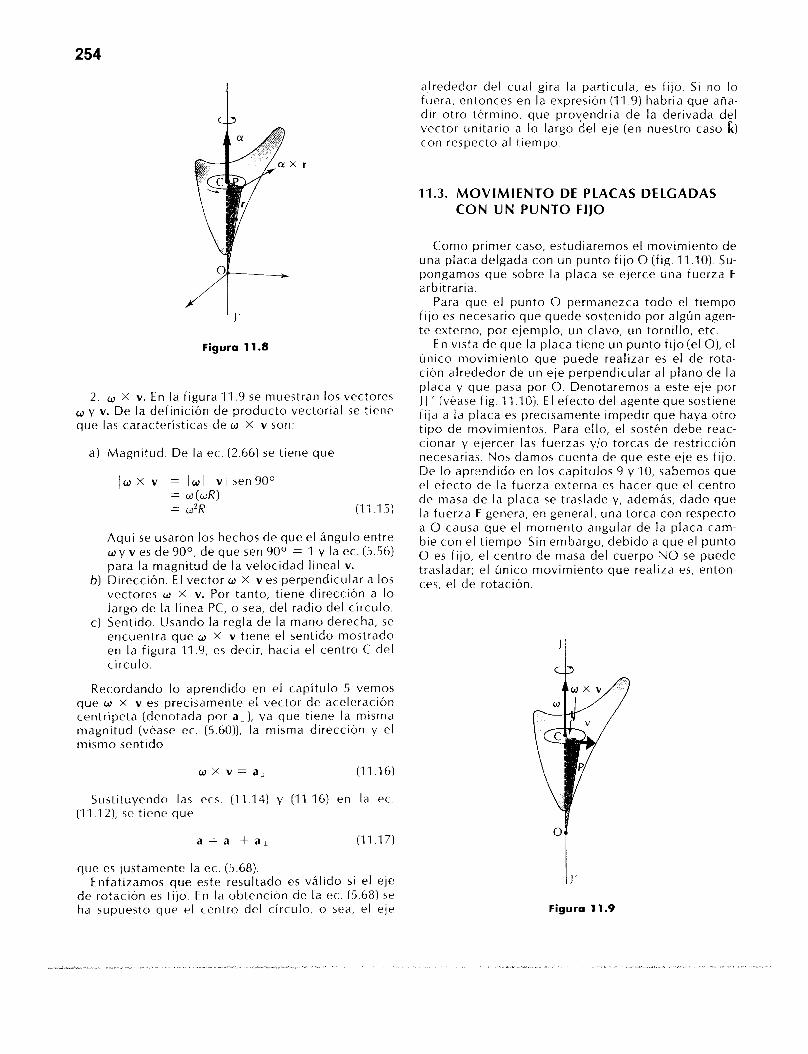
254
' I '
Figura 11.8
2 . w X v. En la figura 11.9 se muestran los vectores y v. De la definición de producto vectorial se tiene
que las características de w x v son:
a) Magnitud. De la ec. (2.66) se tiene que
/ w X V I = l w l h i sen90° = w ( o R ) = w'R (1 1 .I S)
Aquí se uSaron los hechos de que el ánguio entre w y v es de 90°, de que sen 90" = 1 y la ec. (5.56) para la magnitud de la velocidad lineal v.
b) Dirección. E l vector w X ves perpendicular a los vectores w X v. Por tanto, tiene dirección a lo largo de la línea PC, o sea, del radio del círculo.
c) Sentido. Usando la regla de la mano derecha, se encuentra que O X v tiene e l sentido mostrado en la figura 11.9, es decir, hacia el centro C del círculo.
Recordando lo aprendido en el capítulo 5 vemos que o x v es precisamente el vector de aceleracibn centrípeta (denotada por a ? ) , ya que tiene la misma magnitud (véase ec. (5.60)), la misma dirección y el mismo sentido
w X v = a . (11 16)
Sustituyendo las ecs (11.14) y (11 16) en la ec. (11 12). se tiene que
a = a + a i (11 .I 7)
que es justamente la ec. (5.68). Enfatiramos que este resultado es válido s i el eje
de rotación es f i jo. En la obtención de la ec. (5.68) se ha supuesto que el centro del círculo, o sea, el eje
alrededor del cual gira la partícula, es fi jo. S i no lo fuera, entonces en la expresión (11.9) habría que aña- dir otro término, que provendría de la derivada del vector unitario a lo largo del eje (en nuestro caso i ; ) con respecto al tiempo.
11.3. MOVIMIENTO DE PLACAS DELGADAS CON UN PUNTO FIJO
Como primer caso, estudiaremos el movimiento de una placa delgada con un punto f i jo O (fig. 11.10). Su- pongamos que sobre la placa se ejerce una fuerza F arbitraria.
Para que el punto O permanezca todo el tiempo f i jo es necesario que quede sostenido por algún agen- te externo, por ejemplo, un clavo, un tornillo, etc.
En vista de que la placa tiene un punto fijo (el O), el Único movimiento que puede realizar es el de rota- ción alrededor de un eje perpendicular al plano de la placa y que pasa por O. Denotaremos a este eje por J J ' (véase f ig 11 .I Gj . E I efecto del agente que sostiene fija a la placa es precisamente impedir que haya otro t ipo de movimientos. Para ello, el sostén debe reac- cionar y ejercer las fuerzas y10 torcas de restricción necesarias. Nos damos cuenta de que este eje es fi jo. De lo aprondido en los capítulos 9 y 10, sabemos que el efecto de la fuerza externa es hacer que el centro de masa de la placa se traslade y, además, dado que la fuerza F genera, en general, una torca con respecto a O causa que el momento angular de la placa cam- bie con el t iempo Sin embargo, debido a que el punto O es fijo, el centro de masa del cuerpo NO se puede trasladar; el Único movimiento que realiza es, enton- ces, el de rotación.
1 I '
Figura 11.9
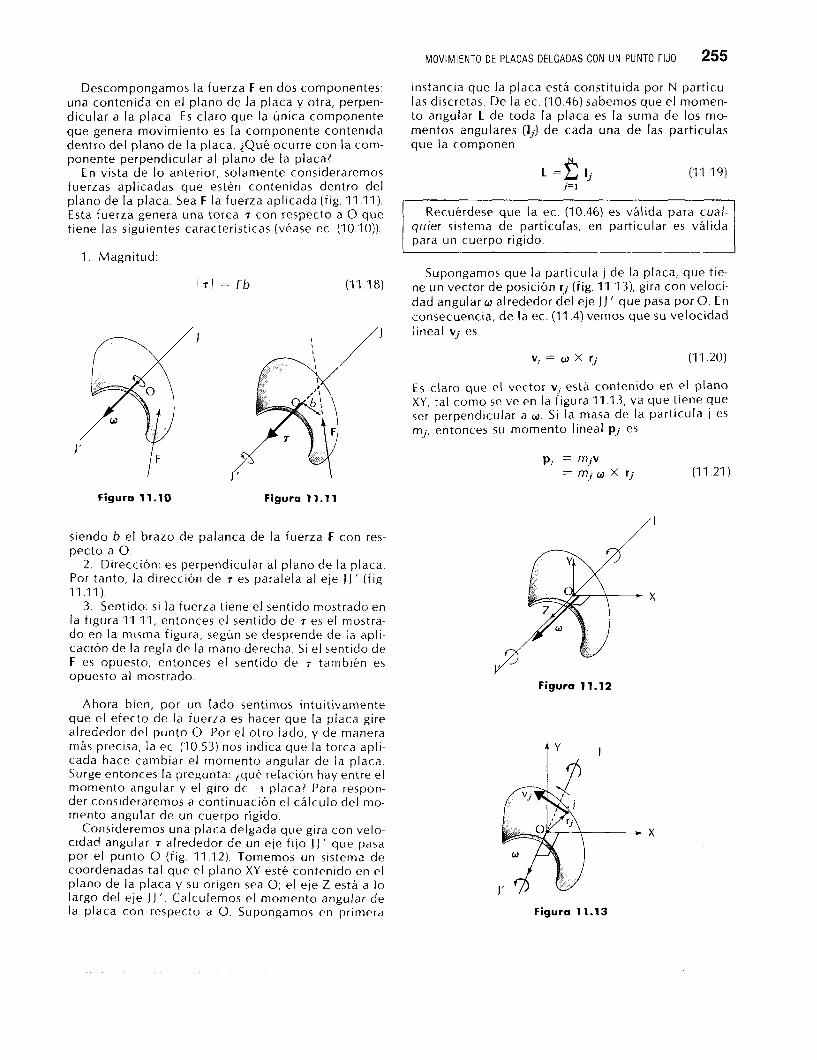
MOVIMIENTO DE PLACAS DELGADAS CON UN PUNTO FIJO 255
Descompongamos la fuerza F en dos componentes: instancia que la placa está constituida por N partícu- una contenida en el plano de la placa y otra, perpen- las discretas. De la ec. (10.46) sabemos que el momen- dicular a la placa. Es claro que la única componente to angular 1 de toda la placa es la suma de los mo- que genera movimiento es la componente contenida mentos angulares (Ij) de cada una de las partículas dentro del plano de la placa. iQué ocurre con la com- que la componen ponente perpendicular al plano de la placa?
En vista de lo anterior, solamente consideraremos 1 =t Ij (1 1 .I 9) fuerzas aplicadas que estén contenidas dentro del ;= 1 plano de la placa. Sea F la fuerza aplicada (fig. 11.11). Esta fuerza genera una torca 7 con respecto a O que Recuérdese que la ec. (10.46) es válida para cual- tiene las siguientes características (véase ec. (IO.IO)): quier sistema de partículas; en particular es válida
para un cuerpo rígido. 1. Magnitud:
Supongamos que la partícula j de la placa, que tie- 171 = Fb (11.18) ne un vector de posición r; (fig. 11.13), gira con veloci-
dad angular o alrededor del eje J J ' que pasa por O. En consecuencia, de la ec. (11.4) vemos que su velocidad
J J l ineal vj es
v, = o X r j (1 1.20)
Es claro que el vector v, está contenido en el plano XY, tal como se ve en la figura 11.13, ya que tiene que ser perpendicular a o. Si la masa de la partícula j es mj, entonces su momento lineal pj es
I p, = mjv
= mj o X r j (1 1.21 1 Figura 11.10 Figura 11.1 1
siendo b el brazo de palanca de la fuerza F con res- pecto a O.
2. Dirección: es perpendicular al plano de la placa. Por tanto, la dirección de T es paralela al eje J J ' (fig. 11.11).
3 . Sentido: si la fuerza tiene el sentido mostrado en la figura 11.11, entonces el sentido de T es el mostra- do en la misma figura, según se desprende de la apli- cación de la regla de la mano derecha. S i el sentido de F es opuesto, entonces el sentido de T también es opuesto al mostrado.
Ahora bien, por un lado sentimos intuitivamente que el efecto de la fuerza es hacer que la placa gire alrededor del punto O. Por el otro lado, y de manera más precisa, la ec. (10.53) nos indica que la torca apli- cada hace cambiar el momento angular de la placa. Surge entonces la pregunta: >qué relación hay entre el momento angular y el giro de I placa? Para respon- der consideraremos a continuación el cálculo del mo- mento angular de un cuerpo rígido.
Consideremos una placa delgada que gira con velo- cidad angular 7 alrededor de un eje f i jo J J ' que pasa por el punto O (fig. 11.12). Tomemos un sistema de coordenadas tal que el plano XY esté contenido en el plano de la placa y su origen sea O; el eje Z está a lo largo del eje J J I . Calculemos el momento angular de la placa con respecto a O. Supongamos en primera
Y' Figura 1 l . 12
x
Figura 11.13
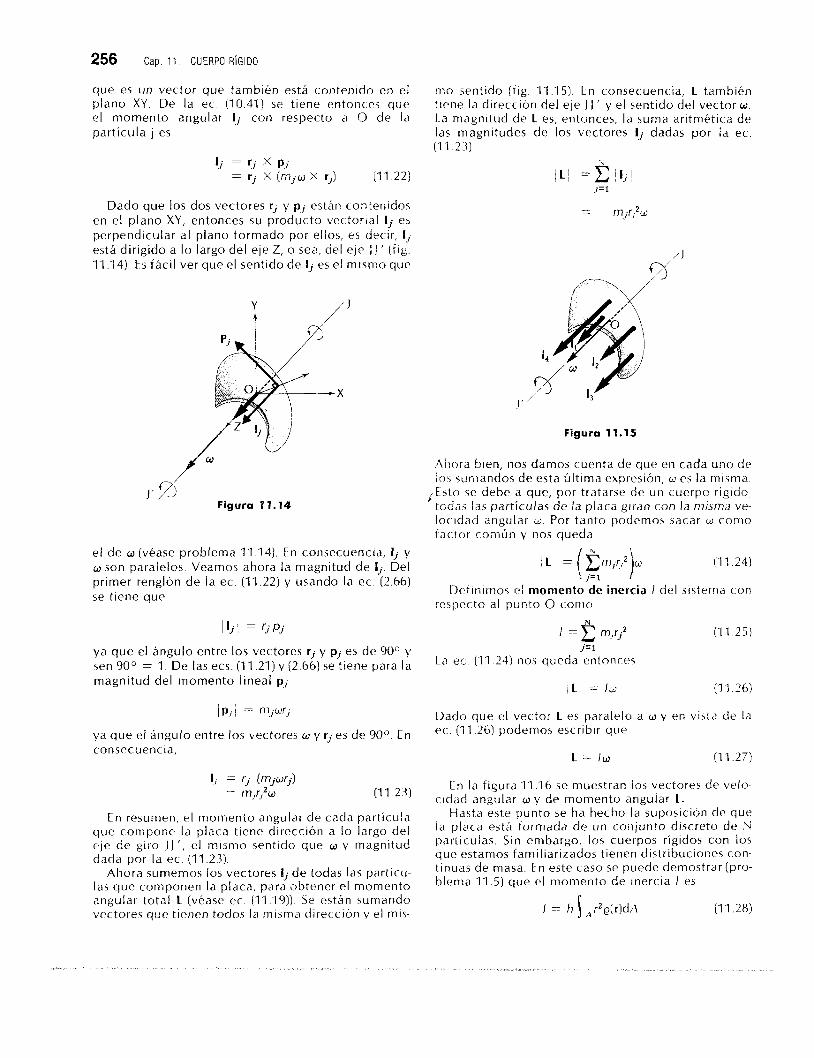
256 CaD. 11. CUERPO RíGIDO
que es un vector que tambien está contenido en el plano XY. De la ec. (10.4'1) se tiene entonces que el momento angular I; con respecto a 0 de Id
partícula j es
I; = r,j X p.i = r,; X (m? u] X r,) (1 1.22)
Dado que los dos vectores r j y pj están con:ertidos en el plano XY, entonces su producto vectorial I j e; perpendicular al plano formado por ellos, es decir, l; está dirigido a lo largo del eje Z, o sea, del eje j i ' (Fig. 11.14). E s fáci l ver que el sentido de I j es el mismo que
mo sentldo (fig. 11.15). En consecuencia, 1 también tiene la dirección del eje J j ' y e l sentido del vector w. La magnitud de L es, entonces, l a suma aritmética de las magnitudes de los vectores Ij dadas por la ec. (1 I .23)
I' '
Figura 1 l . 15
J"
el de w (vease problema 11.14). En consecuencid. l j y O son paralelos Veamos ahora la magnitud de l j . Del primer renglón de la ec, (11.22) y usando la ec. (2.66) se tiene que
1 I, j = r j pj
ya que el ángulo entre los vectores r.i y p, es de 90° y sen 90° = 1. De las ecs. (11.21) y (2.66) se tiene para la magnitud del momento l ineal p.i
1 pi ~ = n7.prj
ya que el ángulo entre los vectores w y rj es de 90°. En consecuencia,
l i = r j (mjwrj) = rnjri2w (1 1.23)
En resumen, el momento angular de cada partícula que compone la placa tiene dirección a lo largo del eje de giro I J I , e l mismo sentido que w y magnitud dada por la ec. (11.23).
Ahora sumemos los vectores l; de todas las partícu- las que componen la placa, para abtener el momento angular total L (véase ec. (11:l9)) Se están sumando vectores que tienen todos la mi5rna clrrección el mis-
Ahora bien, nos damos cuenta de que en cada uno de / o s sumandos de esta última expresión, G' es la misma.
,Esto se debe a que, por tratarse de un cuerpo rígido ' tcda; las partículas de la placa giran con la misma ve-
locidad angular w. Por tanto podemos sacar w como factor común y nos queda
~ 1 I = ( Cnli'i2j" (1 1 .24) I ._ * 1-1
Definirnos el momento de inercia / del sistema con respecto al punto O conlo
I = 2 rn.,rj2 ;= 1
La ec. (11 24) nos queda en!onces
(11 25)
Dado que el vector 1 es paralelo a w y en v i j t s d e la ec. (11.26) podernos escribir que
L = /o (1 I ,271
En la figura 11.16 se muestran io3 vectores de velo- cld;d angular w y de momento angular L.
Hasta este punto se ha hecho la suposicibn de que la placa estA formada de un cvnjunto discreto de N partículas. Sin embargo, los cuerpos rígidos con los que estamos familiarizados tienen distribuciones con- tinuas de masa. En este caso se puede demostrar (pro- blema 11.5) que el momento de inercia I es
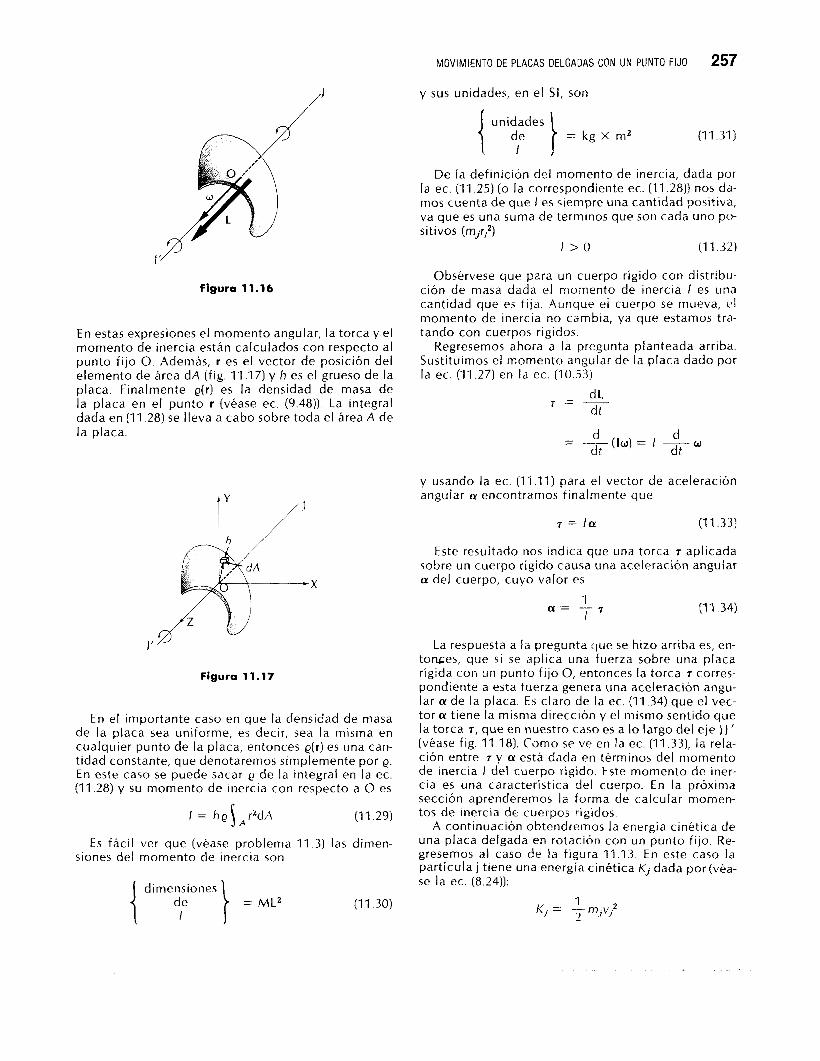
MOVIMIENTO DE PLACAS DELGADAS CON UN PUNTO FIJO 257
Figura 1 l . 16
En estas expresiones el momento angular, la torca y el momento de inercia están calculados con respecto al punto f i jo O. Además, r es el vector de posición del elemento de área dA (fig. 11 .I 7 ) y h es el grueso de la placa. Finalmente e(r) es la densidad de masa de la placa en el punto r (véase ec. (9.48)). La integral dada en (11.28) se lleva a cabo sobre toda el área A de la placa.
Figura 11.17
En el importante caso en que la densidad de masa de la placa sea uniforme, es decir, sea la misma en cualquier punto de la placa, entonces e(r) es una can- tidad constante, que denotaremos simplemente por e. En este caso se puede sacar e de la integral en la ec. (11.28) y su momento de inercia con respecto a O es
I = heSArzdA (1 1.29)
E s fácil ver que (véase problema 11.3) las dimen- siones del momento de inercia son
d,e = ML2 dimensiones
y sus unidades, en el SI, son
d,e = kg X m2 (11.31) unidades
De la definición del momento de inercia, dada por la ec. (11.25) (o la correspondiente ec. (11 28)) nos da- mos cuenta de que I es siempre una cantidad positiva, ya que es una suma de términos que son cada uno po- sitivos (mjr,2)
/ > o (I 1.32)
Obsérvese que para un cuerpo rígido con distribu- ción de masa dada e! momento de inercia I es una cantidad que es fila. Aunque el cuerpo se mueva, el momento de inercia no cambia, ya que estamos tra- tando con cuerpos rígidos.
Regresemos ahora a la pregunta planteada arriba. Sustituimos el momento angular de la placa dado por la ec. (11.27) en la ec. (10.53)
d L. dt
7 = "
- d d " -(la) = I -
dt dt w
y usando la ec. (11.11) pard el vector de aceleración angular (Y encontramos finalmente que
r = /(Y (11.331
Este resultado nos indica que una torca r aplicada sobre un cuerpo rígido causa una aceleraci6n angular a! del cuerpo, cuyo valor es
1 (Y= r 7 (1 1 .34)
La respuesta a la preguntd ciue se hizo arriba es, en- tonces, que s i se aplica una fuerza sobre una placa rígida cot-I un punto f i jo O, entonces la torca T corres- pondiente a esta fuerza genera una aceleracibn angu- lar a! de la placa. Es claro de la ec. (11.34) que el vec- tor a! tiene la misma direccion y el mismo sentido que la torca T, que en nuestro caso es a lo largo del eje I J ' (véase fig. 11.18). Como se ve en la ec. (11.33), la rela- ción entre 7 y a! está dada en términos del momento de inercia I del cuerpo rígido. Este momento de iner- cia es una característica del cuerpo. En la próxima sección aprenderemos la forma de calcular momen- tos de inercia de cuerpos rígidos.
A continuación obtendremos la energía cinktica de una placa delgada en rotaci6n con un punto fijo. Re- gresemos al caso de la figura 11.13. En este caso ta partícula j tiene una energía cinética Kj dada por (véa- se la ec. (8.24)):
(1 1.30)
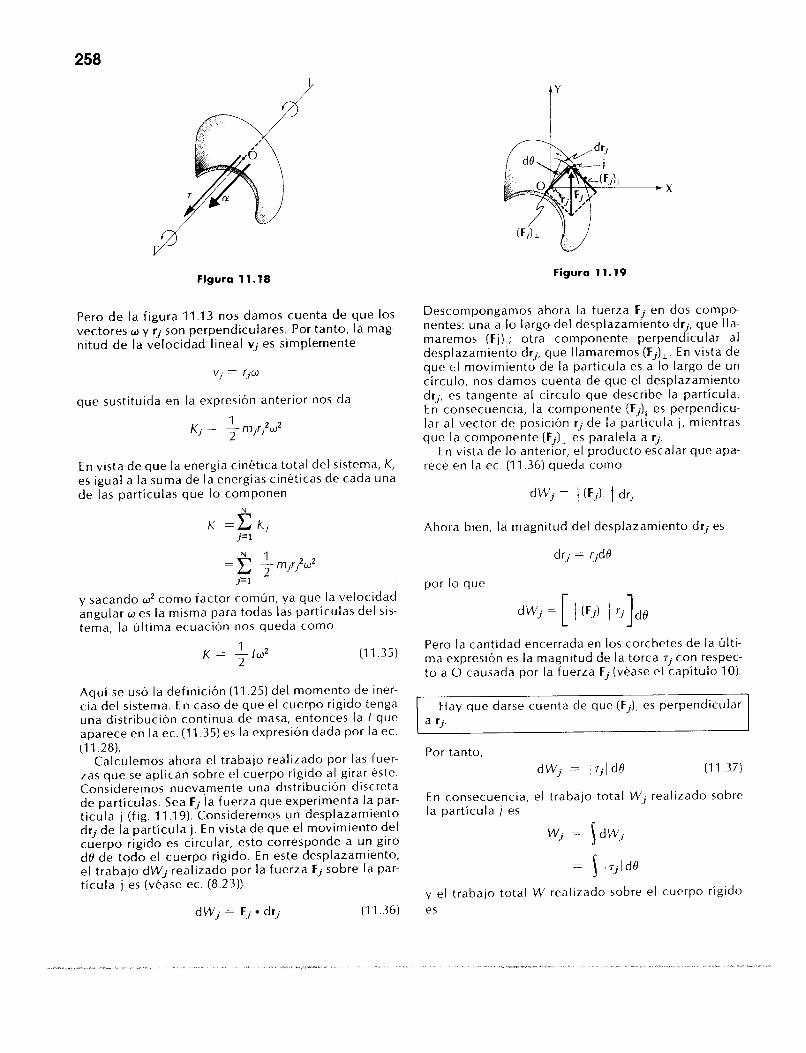
258
Figura 11.18 Figura 11.19
Pero de la f igura 11.13 nos damos cuenta de que los vectores w y r j son perpendiculares. Por tanto, la mag- ni tud de la velocidad l ineal v j es simplemente
v j = r jw
que sustituida en la expresión anterior nos da
En vista de que la energía cinética total del sistema, K, es igual a la suma de la energías cinéticas de cada una de las partículas que lo componen
K = k j j = 1
N 1 = mjr j2w2 j=1 -
y sacando w2 como factor común, ya que la velocidad angular w es la misma para todas las partículas del sis- tema, la últ ima ecuación nos queda como
K = L i w 2 2 (1 1.35)
Aquí se usó la definición (11.25) del momento de iner- cia del sistema. En caso de que el cuerpo rígido tenga una distribución continua de masa, entonces la I que aparece en la ec. (11.35) es la expresión dada por la ec. (1 1.28).
Calculemos ahora el trabajo realizado por las fuer- zas que se aplican sobre el cuerpo rígido al girar éste. Consideremos nuevamente una distribución discreta de partículas. Sea Fj la fuerza que experimenta la par- t ícula j (fig. 11.19). Consideremos un desplazamiento drj de la partícula J. En vista de que el movimiento del cuerpo rígido es circular, esto corresponde a un giro dB de todo el cuerpo rígido. En este desplazamiento, e l t rabajo dWj real izado por la fuerza F j sobre la par- tícula j es (véase ec. (8.23))
d W j = Fj d r j (1 1.36)
Descompongamos ahora la fuerza F j en dos compo- nentes: una a lo largo del desplazamiento drt que I la- maremos (Fj) ; otra componente perpendicular al desplazamiento drj, que llamaremos (FJl. En vista de que el movimiento de la partícula es a lo largo de un círculo, nos damos cuenta de que el desplazamiento drj, es tangente al círculo que describe la partícula. En consecuencia, la componente (Fj),, es perpendicu- lar al vector de posición r j de la partícula j, mientras que la componente (Fj), es paralela a rj.
En vista de lo anterlor, el producto escalar que apa- rece en la ec. (11.36) queda como
Ahora bien, la magnitud del desplazamiento drj es
d r j = rjd8
por lo que
Pero la cantidad encerrada en los corchetes de la últi- ma expresión es la magnitud de la torca rj con respec- to a O causada por la fuerza Fj (véase el capítulo IO).
Hay que darse cuenta de que (Fj) es perpendicular a r j .
Por tanto, d W j = / 7 i I d 8 (11.37)
En consecuencia, el trabajo total Wj realizado sobre la partícula j es
= 1 17jldB
y el trabajo total W realizado sobre el cuerpo rígido es
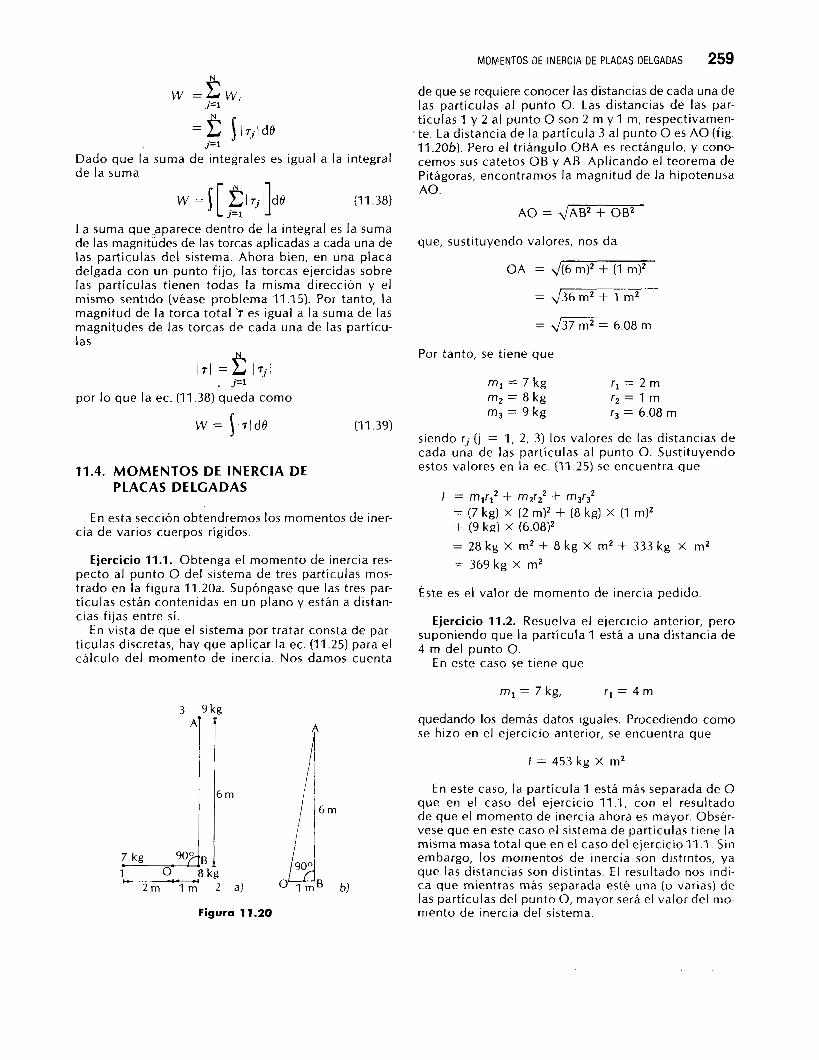
MOMENTOS DE INERCIA DE PLACAS DELGADAS 259 N
w = c w ; j= 1
J "
j= 1
Dado que la suma de integrales es igual a la integral de la suma
(1 1.38)
La suma quepparece dentro de la integral es la suma de las magnitudes de las torcas aplicadas a cada una de las partículas del sistema. Ahora bien, en una placa delgada con un punto f i jo, las torcas ejercidas sobre las partículas tienen todas la misma dirección y el mismo sentido [véase problema 11.15). Por tanto, la magnitud de la torca total i es igual a la suma de las magnitudes de las torcas de cada una de las partícu- I as
por lo que la ec. (11.38) queda como
W = \i71dO (11.39)
11.4. M O M E N T O S DE INERCIA DE PLACAS DELGADAS
En esta sección obtendremos los momentos de iner- cia de varios cuerpos rígidos.
Ejercicio 11.1. Obtenga el momento de inercia res- pecto al punto O del sistema de tres partículas mos- trado en la figura 11.20a. Supóngase que las tres par- tículas están contenidas en un plano y están a distan- cias fijas entre sí.
En vista de que el sistema por tratar consta de par- tículas discretas, hay que aplicar la ec. (11.25) para el cálculo del momento de inercia. Nos damos cuenta
3 9ks A*
6rn
1 1 Figura 1 1.20
de que se requiere conocer las distancias de cada una de las partículas al punto O. Las distancias de las par- tículas 1 y 2 al punto O son 2 m y 1 m, respectivamen- te. La distancia de la partícula 3 al punto O es A 0 (fig. 11.20b). Pero el triángulo OBA es rectángulo, y cono- cemos sus catetos OB y AB. Aplicando el teorema de Pitágoras, encontramos la magnitud de AO.
A 0 = JAB2 + OB2
que, sustituyendo valores, nos da
OA = J(6 m), + (1 m)'
= J36m2 + I m 2
= &%?-= 6.08 m
a hipotenusa
Por tanto, se tiene que
m, = 7 k g r l = 2 m m, = 8 k g r Z = l m m3 = 9 k g r3 = 6.08 m
siendo r j ( j = 1, 2, 3) los valores de las distancias de cada una de las partículas al punto O. Sustituyendo estos valores en la ec. (11.25) se encuentra que
/ = m1rl2 + m2rz2 + m,r,2 = (7 kg) X (2 mI2 + (8 kg) X (1 m)2 + (9 kg) x (6.081, = 28 kg X m2 + 8 k g x m2 + 333 k g x m2 = 369 kg X m2
Éste es el valor de momento de inercia pedido
Ejercicio 11.2. Resuelva el ejercicio anterior, pero suponiendo que la partícula 1 está a una distancia de 4 m del punto O.
En este caso se tiene que
m, = 7 kg, r1 = 4 m
quedando los demás datos iguales. Procediendo como se hizo en el ejercicio anterior, se encuentra que
/ = 453 kg X m2
En este caso, la partícula 1 está más separada de O que en el caso del ejercicio 11.1, con el resultado de que el momento de inercia ahora es mayor. Obsér- vese que en este caso el sistema de partículas tiene la misma masa total que en el caso del ejercicio 11 .l. Sin embargo, los momentos de inercia son distintos, ya que las distancias son distintas. E l resultado nos indi- ca que mientras más separada esté una (o varias) de las partículas del punto O, mayor será el valor del rno- mento de inercia del sistema.
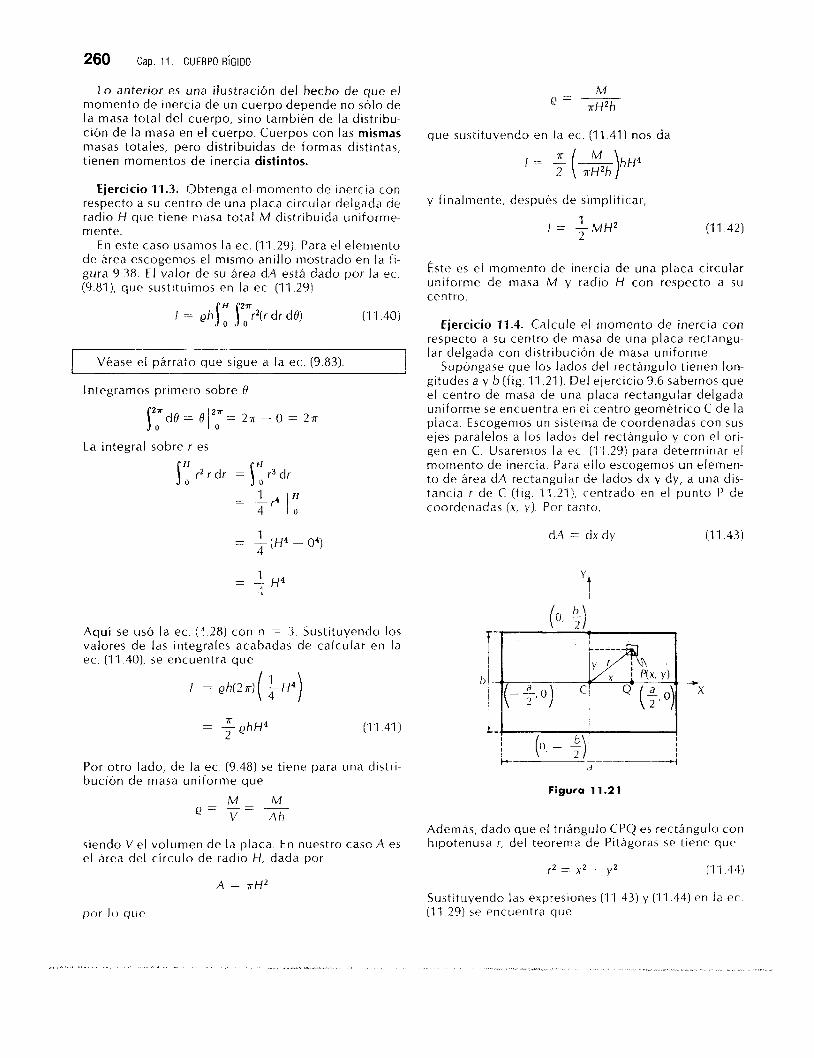
260 Cap. 11 CUERPO RíGIDO
Lo anterior es una ilustración del hecho de que el momento de inercia de un cuerpo depende no sólo de la masa total del cuerpo, sino también de la distribu- ción de la masa en el cuerpo. Cuerpos con las mismas masas totales, pero distribuidas de formas distintas, tienen momentos de inercia distintos.
Ejercicio 11.3. Obtenga el.momento de inercia con respecto a su centro de una placa circular delgada de radio H que tiene rlasa total M distribuida uniforme- mente.
En este caso usamos la ec. (11.29). Para el elemento de área escogemos el mismo anillo mostrado en la f i - gura 9.38. E l valor de su área dA está dado por !a ec. (9.81), que sustituimos en la ec. (11.29)
! = e h j o S , r2(r dr dB) H 2?r
(1 1.40)
)GL;o"Tie sigue a la ec. (9.83). I
I Integramos primero sobre
La integral sobre r es H S, r 2 r d r = \ il r 3 d r
H
= " 4 1 1': 4
Aquí se usó la ec. :1.28) con n = 3. Sustituyendo los valores de las integrales acabadas de calcular en la ec. (1 1.40), se encuentra que
= - @ h H 4 x 2
(1 1.41 )
Por otro lado, de la ec. (9.48) se tiene para una dlstri- bución de masa uniforme que
M M @ = v = Ah
siendo Vel volumen de la placa. En nuestro caso A es P I área del círculo de radio H, dada por
A = a H 2
que sustituyendo en la ec. (11.41) nos da
y finalmente, después de simplificar, 1 I = - M H z 2 (1 1.42)
Éste es el momento de inercia de una placa circular uniforme de masa M y radio H con respecto a su centro.
Ejercicio 11.4. Calcule el momento de inercia con respecto a SU centro de masa de una placa rectangu- lar delgada con distribución de masa uniforme.
Supóngase que los lados del rectángulo tienen lon- gitudes a y b (fig. 11 21). Del ejercicio 9.6 sabemos que el centro de masa de una placa rectangular delgada uniforme se encuentra eTr el centro geométrico C de la placa. Escogemos un sistema de coordenadas con sus ejes paralelos a 105 lado5 del rectángulo y con el ori- gen en C. Usaremos la ec. (1.1.29j para determinar e l momento de inercia. Para ello escogemos un elemen- to de área dA rectangular de lados dx y dy, a una dis- tancia r de C (fig. I l . 2 l j , centrado en el punto P de coordenadas (x, y). Por tan to ,
dA = dx dy (1 1.43)
Figura 1 1.2 1
Además, dado que el triángulo CPQ e5 rectángulo con hipotenusa r, del teorema de Pitágoras se tiene que
r2 = x z + y2 (1 1.44)
Sustituyendo las expresiones (11.43) y (11 44) en la ec. (11.29) se encuentra que
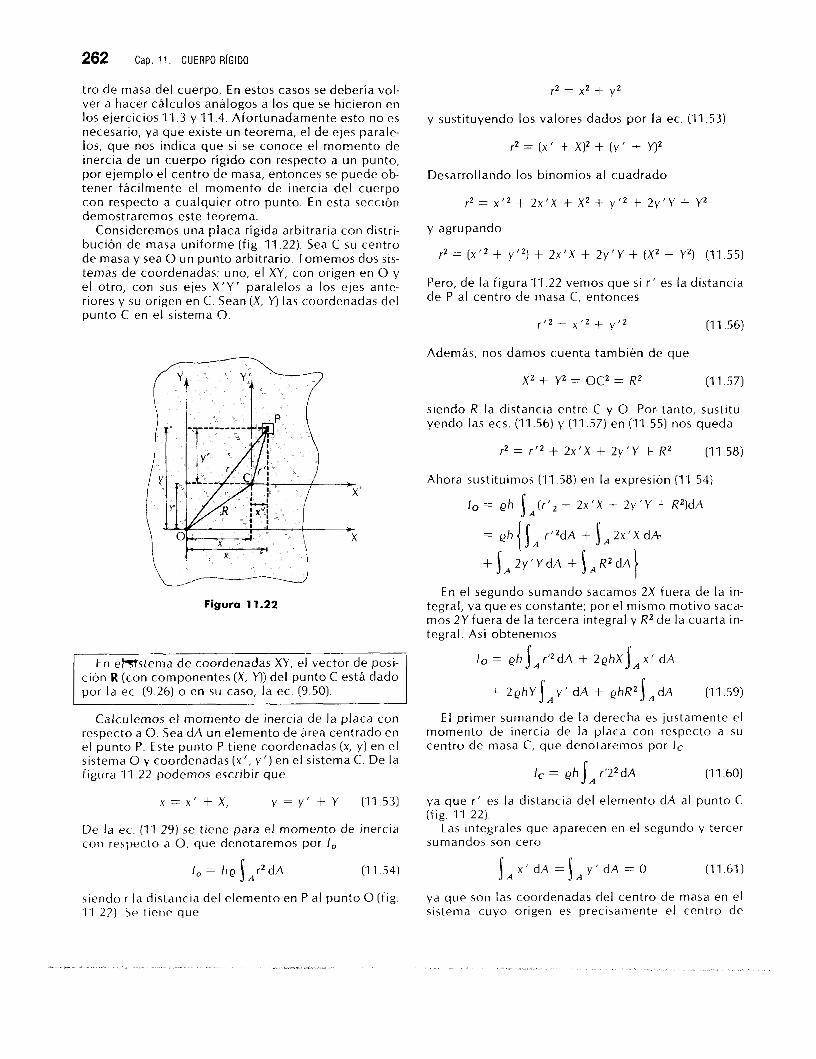
262 Cap. 11. CUERPO RíGIDO
t ro de masa del cuerpo. En estos casos se debería vol- ver a hacer cálculos análogos a los que se hicieron en los ejercicios 11.3 y 11.4. Afortunadamente esto no es necesario, ya que existe un teorema, el de ejes parale- los, que nos indica que si se conoce el momento de inercia de un cuerpo rígido con respecto a un punto, por ejemplo el centro de masa, entonces se puede ob- tener fácilmente el momento de inercia del cuerpo con respecto a cualquier otro punto. En esta sección demostraremos este teorema.
Consideremos una placa rígida arbitraria con distri- bución de masa uniforme (fig. 11.22). Sea C su centro de masa y sea O un punto arbitrario. Tomemos dos sis- temas de coordenadas: uno, el XY, con origen en O y el otro, con sus ejes X ’ Y ‘ paralelos a los ejes ante- riores y su origen en C. Sean (X, Y) las coordenadas del punto C en el sistema O.
u Figura 11.22
En emstema de coordenadas XY, el vector de posi- ción R (con componentes (X, Y)) del punto C está dado por la ec (9.26) o en su caso, la ec. (9.50). I
Calculemos el momento de inercia de la placa con respecto a O. Sea dA un elemento de área centrado en el punto P. Este punto P tiene coordenadas (x, y) en el sistema O y coordenadas (x ’ , y’) en el sistema C. De la figura 11.22 podemos escribir que
r2 = x2 + y2
y sustituyendo los valores dados por la ec. (11.53)
r2 = (x’ + X)2 + (y ’ + Desarrollando los binomios al cuadrado
r2 = x ’ 2 + 2x’X + x2 + y’2 + 2y’Y + Y‘
y agrupando
r2 = ( x ” + y’2) + 2x’X + 2y‘Y + (X2 + Y2) (11.55)
Pero, de la figura 11.22 vemos que s i r ‘ es la distancia de P al centro de masa C, entonces
r r 2 = x ‘ 2 + y ! 2 (1 1.56)
Además, nos damos cuenta también de que
siendo R la distancia entre C y O. Por. tanto, sustitu- yendo las ecs. (11.56) y (11.57) en (11.55) nos queda
r2 = r r Z + 2x’X + 2y’Y + R2 (11.58)
Ahora sustituimos (11.58) en la expresión (11.54)
lo = eh S A ( r I 2 + 2x’X + 2y’Y + R2)dA
= r’2dA + j A 2 x ’ X d h
+ J A 2 y ‘ y d ~ + l A R 2 d A i En el segundo sumando sacamos 2X fuera de la in-
tegral, ya que es constante; por el mismo motivo saca- mos 2Y fuera de la tercera integral y R2 de la cuarta in- tegral. Así obtenemos
1 0 = ehJ’,rJ2dA + í!QhXJ’,x‘ dA
+ 2ehYSAy‘ dA + ehRZI,dA (11.59)
E l primer sumando de la derecha es justamente el momento de inercia de la placa con respecto a su centro de masa C, que denotaremos por I C
IC = eh S, r‘22 dA (1 1.60)
x = x ’ + x, y = y ’ + Y (11.53) ya que r ’ es la distancia del elemento dA al punto C (fig. 11.22).
De la ec. (1 1.29) se tiene para el momento de inercia Las integrales que aparecen en el segundo y tercer con respecto a O, que denotaremos por I , sumandos son cero
I , = he SAr2dA (11 54) (11.61)
siendo r l a distancia del elemento en P al punto O (fig. ya que son las coordenadas del centro de masa en el 11 22) Se1 tiene que sistema cuyo origen es precisamente el centro de

TEOREMA DE EJES PARALELOS 263
masa (véase ec. (10.81) y problemas 10.28 y 11.8). Fi- nalmente, la integral que aparece en el último suman- do (11.59) es justamente el área A de la placa
SadA = A (11.62)
Sustituyendo las expresiones (11.60)-(11.62) en la ec. (11.59) se obtiene que
lo = lc + ebAR2 (1 1.63)
Ahora bien, para una placa con distribución de masa uniforme, la ec. (9.48) para la densidad de masa es
M M e = v = Ah
siendo V ( = Ab) el volumen de la placa y M su masa total. Por tanto,
eha = M (1 1.64)
Sustituyendo este valor en la ec. (11.63), obtenemos fi- nalmente que
lo = lc + MR2 (1 1.65)
Esta relación constituye el teorema de ejes paralelos: el momento de inercia con respecto a un punto arbi- trario O de una placa delgada uniforme es igual al momento de inercia con respecto a su centro de masa C más el producto de la masa total M de la placa por el cuadrado de la distancia R del centro de masa C al punto O.
De la ec. (11.65) es claro que si se conoce el momento de inercia de una placa con respecto a su centro de masa, entonces se puede obtener muy fácil- mente el momento de inercia con respecto a cual- quier otro punto. En consecuencia, dada una placa, es suficiente calcular su momento de inercia con respec- to a su centro de masa.
Ejercicio 11.5. Una placa rectangular delgada, uni- forme, tiene masa de 3.7 kg. Los lados de la placa mi- den 4 m y 6 m. Obtenga el momento de inercia de la placa con respecto a un vértice.
Sea O el vértice en cuestión (fig. 11.23). E I centro de
c 6rn
masa C de la placa se encuentra en su centro geomé- t r ico C.
E l momento de inercia de la placa con respecto al centro de masa ya se obtuvo y está dado por la ec. (11.52). La distancia R entre el centro de masa C y el punto O es (usando la misma notación del ejercicio 11.4)
R2 = (+)'+ (+) 2
= 4(a2 + b2) I
(1 1.66)
Por tanto, sustituyendo las ecs. (11.52) y (11.66) en la ec. (11.65), se obtiene que
l o = lc + MR2 = - M(a2 + b2) + M (a2 + b2) I I
12
= - M(a2 + b2) 1 3 (1 1.67)
Sustituyendo valores se encuentra que
10 = - X 3.7 kg X 1 3 1
- " 3.7 x (16 + 36) kg X m2
3 = 64.13 kg X m2
Ejercicio 11.6. Obtenga el momento de inercia de una placa circular delgada, uniforme, con respecto a un punto sobre la circunferencia. La masa de placa es de 25.7 kg y su radio es de 3.5 m.
En el ejercicio 11.3 se obtuvo el momento de iner- cia de una placa circular uniforme, delgada, con res- pecto a su centro de masa (véase ec. (1 1.42)). Por tan- to, usando la ec. (11.65) se tiene para el momento de inercia de la placa con respecto a un punto O de su periferia
lo = lc + MHz
siendo M la masa total de la placa y H su radio. Susti- tuyendo la ec. (11.42) nos da
Sustituyendo valores se encuentra que
lo = - X 25.7 kg X (3.5 m)* 3 2
- - 3 X 25.7 X 12.25 kg x m2 2
Figura 1 1.23 = 472.24 kg x m2
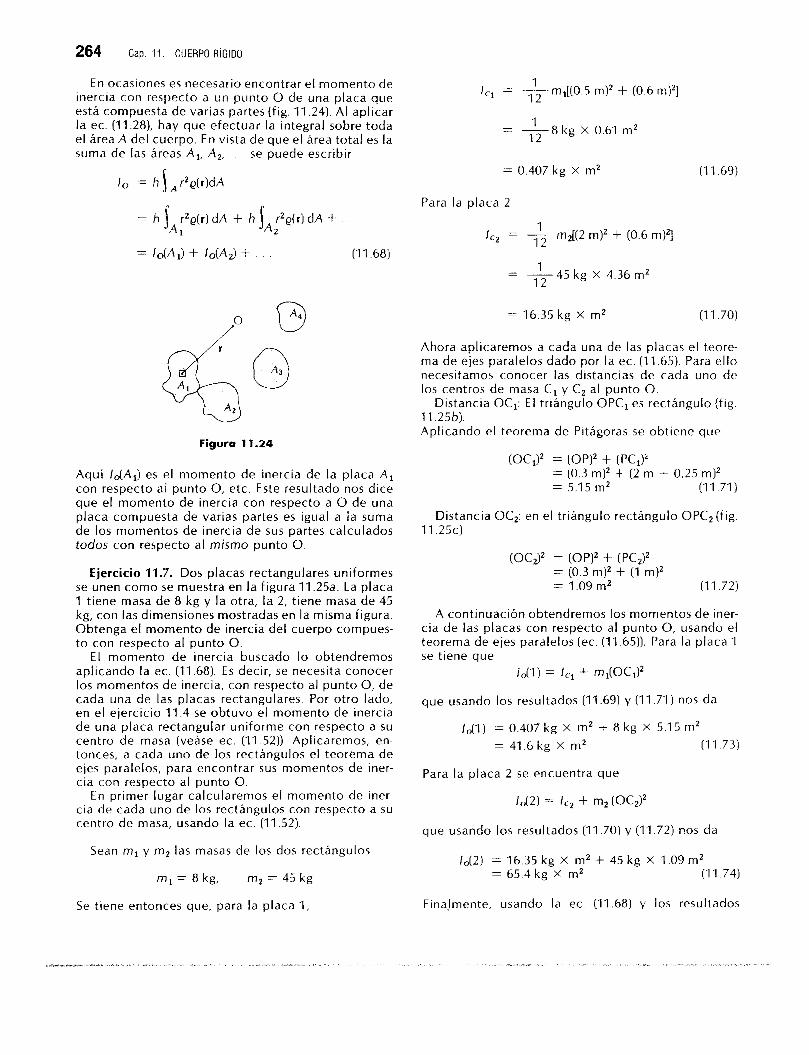
264 Cap. 11. CUERPO RiGlDO
En ocasiones es necesario encontrar el momento de inercia con respecto a un punto O de una placa que está compuesta de varias partes (fig. 11.24). AI aplicar la ec. (11.281, hay que efectuar la integral sobre toda el área A del cuerpo. En vista de que el área total es la suma de las Breas A,, A,, se puede escribir
I C , = - 1 2 ml[(0.5 m), + (0.6 mi7
- -~ 1 2 8 kg X 0.61 m2
= 0.407 kg X m2
Para la placa 2
I,, = - 1 2 m2[(2 m), + (0.6 mI2]
I - - 1 2 45 kg X 4.36 m2
n
Figura 11.24
Aquí /AA,) es el momento de inercia de la placa A, con respecto al punto O, etc. Este resultado nos dice que el momento de inercia con respecto a O de una placa compuesta de varias partes es igual a la suma de los momentos de inercia de sus partes calculados todos con respecto al mismo punto O.
Ejercicio 11.7. Dos placas rectangulares uniformes se unen como se muestra en la figura 11.25a. La placa 1 tiene masa de 8 kg y la otra, la 2, tiene masa de 45 kg, con las dimensiones mostradas en la misma figura. Obtenga el momento de inercia del cuerpo compues- to con respecto al punto O.
E l momento de inercia buscado lo obtendremos aplicando la ec. (11.68). Es decir, se necesita conocer los momentos de inercia, con respecto al punto O, de cada una de las placas rectangulares. Por otro lado, en el ejercicio 11.4 se obtuvo el momento de inercia de una placa rectangular uniforme con respecto a su centro de masa (veáse ec. (11.52)). Aplicaremos, en- tonces, a cada uno de los rectángulos el teorema de ejes paralelos, para encontrar sus momentos de iner- cia con respecto al punto O.
En primer lugar calcularemos el momento de iner- cia de cada uno de los rectángulos con respecto a su centro de masa, usando la ec. (11.52).
Sean m, y m2 las masas de los dos rectángulos
m, = 8 kg, m2 = 45 kg
Se tiene entonces que, para la placa 1,
(1 1.69)
= 16.35 kg X m 2 (11.70)
Ahora aplicaremos a cada una de las placas el teore- ma de ejes paralelos dado por la ec. (11.65). Para ello necesitamos conocer las distancias de cada uno de los centros de masa C, y Cz al punto O.
Distancia OC,: E l triángulo OPC, es rectángulo (fig. 11.25b). Aplicando el teorema de Pitágoras se obtiene que
(OC,)2 = (0P)Z + (PC$ = (0.3 m)2 + ( 2 m + 0.25 m), = 5.15 m2 (11.71)
Distancia OC2: en el triángulo rectángulo OPC2(fig. 11.25cl
(OC2)2 = (0P)Z + (PC212 = (0.3 m)2 + (1 m)’ = I .O9 m2 (11.72)
A continuación obtendremos los momentos de iner- cia de las placas con respecto al punto O, usando el teorema de ejes paralelos (ec. (11.65)). Para la placa 1 se tiene que
/dl) = I , , + m,(OC1)2
que usando los resultados (11.69) y (11.71) nos da
/dl) = 0.407 kg X In2 + 8 kg X 5.15 m2 = 41.6 kg X m2 (1 1.73)
Para la placa 2 se encuentra que
Id21 = I C , + m2 (OC,)2
que usando los resultados (11.70) y (11.72) nos da
ld2) = 16.35 kg X m2 + 45 kg X 1 .O9 m’ = 65.4 kg X m2 (I 1.74)
Finajmente, usando la ec. (11.68) y los resultados
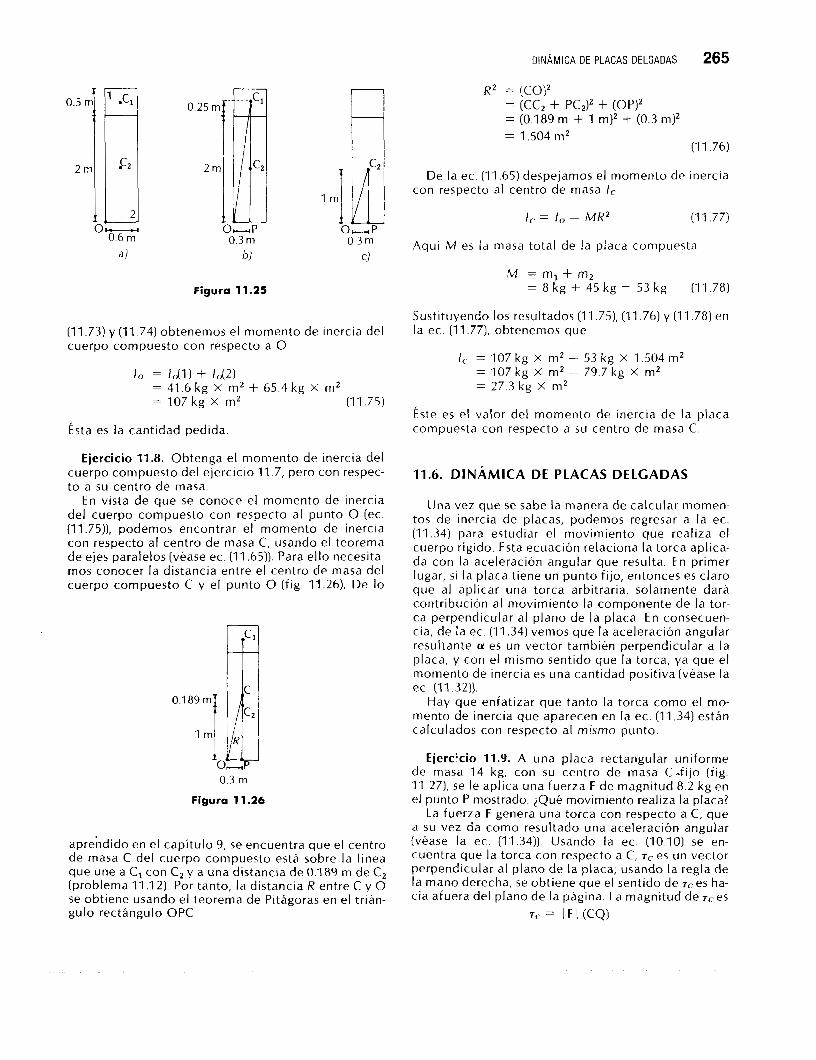
1- 0.6 m
0.25 m
2;;
o-P 0.3 m
O W P 0 3 m
Figura 11.25
(11.73) y (11.74) obtenemos el momento de inercia del cuerpo compuesto con respecto a O
lo = lo(1) + 10(2) = 41.6 kg X m2 + 65.4kg X m2 = 107 kg X m2 (1 1.75)
ÉSta es la cantidad pedida
Ejercicio 11.8. Obtenga el momento de inercia del cuerpo compuesto del ejercicio 11.7, pero con respec- to a su centro de masa.
En vista de que se conoce el momento de inercia del cuerpo compuesto con respecto al punto O (ec. (11.75)), podemos encontrar el momento de inercia con respecto al centro de masa C, usando el teorema de ejes paralelos (véase ec. (11.65)). Para ello necesita- mos conocer la distancia entre el centro de masa del cuerpo compuesto C y el punto O (fig. 11.26). De lo
89 “i C
t R
-P 0.3 m
Figura 1 1.26
aprendido en el capítulo 9, se encuentra que el centro de masa C del cuerpo compuesto está sobre la línea que une a C1 con C, y a una distancia de 0.189 m de C2 (problema 11.12). Por tanto, la distancia R entre C y O se obtiene usando el teorema de Pitágoras en el trián- gulo rectángulo OPC
DINÁMICA DE PLACAS DELGADAS 265
R2 = (coy = (CC2 + PC*I2 + (OPY = (0.189 m + 1 m)2 + (0.3 m)’ = 1.504 m2
(1 1.76)
De la ec. (11.65) despejamos el momento de inercia con respecto al centro de masa Ir
I , = I, - MR2 ( I 1.77)
Aquí M es la masa total de la placa compuesta
M = m, + r n 2
= 8 kg + 45 kg = 53 kg (11.78)
Sustituyendo los resultados (11.75), (11.76) y (11.78) en la ec. (11.77), obtenemos que
I , = 107 kg x m 2 - 53 kg x 1.504 m2 = 107 kg x m2 - 79.7 kg X m2 = 27.3 kg X m 2
Éste es el valor del momento de inercia de la placa compuesta con respecto a su centro de masa C.
11.6. DINÁMICA DE PLACAS DELGADAS
Una vez que se sabe la manera de calcular momen- tos de inercia de placas, podemos regresar a la ec. (11.34) para estudiar el movimiento que realiza el cuerpo rígido. Esta ecuación relaciona la torca aplica- da con la aceleración angular que resulta. En primer lugar, si la placa t iene un punto f i jo, entonces es claro que al aplicar una torca arbitraria, solamente dará contribución al movimiento la componente de la tor- ca perpendicular al plano de la placa. En consecuen- cia, de la ec. (11.34) vemos que la aceleración angular resultante 01 es un vector también perpendicular a la placa, y con el mismo sentido que la torca, ya que el momento de inercia es una cantidad positiva (véase la ec. (11.32)).
Hay que enfatizar que tanto la torca como el mo- mento de inercia que aparecen en la ec. (11.34) están calculados con respecto al mismo punto.
Ejerc’cio 11.9. A una placa rectangular uniforme de masa 14 kg, con su centro de masa C-fijo (fig. 11.27), se le aplica una fuerza F de magnitud 8.2 kg en el punto P mostrado. iQué movimiento realiza la placa?
La fuerza F genera una torca con respecto a C, que a SU vez da como resultado una aceleración angular (véase la ec. (11.34)). Usando la ec. (10.10) se en- cuentra que la torca con respecto a C, Tc es un vector perpendicular al plano de la placa; usando la regla de la mano derecha, se obtiene que el sentido de T~ es ha- cia afuera del plano de la página. La magnitud de Tees
T C I F I (CQ)
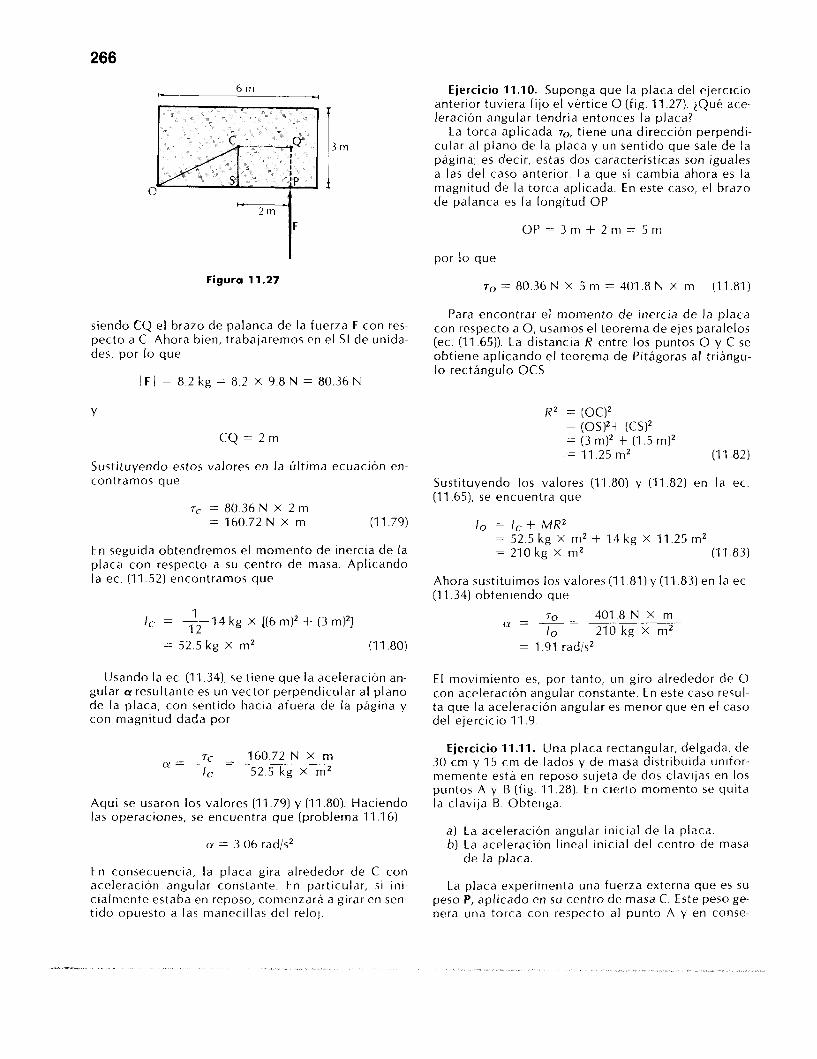
266
)c- 6 m
Y
Figura 1 1.27
Ejercicio 11.10. Suponga que la placa del ejercicio anterior tuviera fijo el vértice O (fig. 11.27). iQué ace- leración angular tendría entonces la placa?
La torca aplicada 70, tiene una dirección perpendi- cular al plano de la placa y un sentido que sale de la página; es decir, estas dos características son iguales a las del caso anterior. La que sí cambia ahora es la magnitud de la torca aplicada. En este caso, el brazo de palanca es la longitud OP
O P = 3 m + 2 m = 5 m
por lo que
T~ = 80.36 N X 5 m = 401.8 N X m (11.81)
Para encontrar el momento de inercia de la placa siendo CQ el brazo de Palanca de la fuerza F con res- con respecto a O, usamos el teorema de ejes paralelos Pecto a c. Ahora bien, trabajaremos en el SI de unida- (ec. (11.65)). La distancia R entre los puntos O y C se des, por lo que obtiene aplicando el teorema de Pitágoras al triángu-
lo rectángulo OCS 1 F 1 = 8.2 kg = 8.2 X 9.8 N = 80.36 N
V
C Q = 2 m
Sustituyendo estos valores en la última ecuación en- contramos que
rc = 80.36 N X 2 m = 160.72 N X m (1 1.79)
En seguida obtendremos el momento de inercia de la placa con respecto a su centro de masa. Aplicando la ec. (11.52) encontramos que
l~ = -14 kg X [(6 m)2 + (3 m)2] 1 1 2
= 52.5 kg X m2 (11.80)
R2 = (OC)* = (OS)2+ (CS)2 = (3 m)2 + (1.5 m)2 (= 11.25 m2 (1 1.82)
Sustituyendo los valores (11.80) y (11.82) en la ec. (11.65), se encuentra que
/ o = IC + M R 2 = 52.5 kg x m2 + 14 kg X I 1 2 5 m 2 = 210 kg X m2 (11.83)
Ahora sustituimos los valores (11.81) y (11.83) en la ec. (11.34) obteniendo que
70 - 401.8 N X m / O 210 kg X m2
cy = __-
= 1.91 radls2
Usando la ec. (11.34), se tiene que la aceleración an- E l movimiento es, por tanto, un giro alrededor de O gular (Y resultante es un vector perpendicular al plano con aceleración angular constante. En este caso resul- de la placa, con sentido hacia afuera de la página y ta que la aceleración angular es menor que en el caso con magnitud dada por del eiercicio 11.9.
(y= ~- rc - 160.72 N X m IC 52.5 kg x m*
Aquí se usaron los valores (11.79) y (11.80). Haciendo las operaciones, se encuentra que (problema 1 I .I 6)
cy = 3.06 radls2
En consecuencia, la placa gira alrededor de C con aceleración angular constante. En particular, si in!- cialmente estaba en reposo, comenzará a girar en sen- tido opuesto a las manecillas del reloj.
Ejercicio 11.11. Una placa rectangular, delgada, de 30 cm y 1 5 cm de lados y de masa distribuida unifor- memente está en reposo sujeta de dos clavijas en los puntos A y B (fig. 11.28). En cierto momento se quita la clavija B. Obtenga:
a) La aceleración angular inicial de la placa. b) La aceleración lineal inicial del centro de masa
de la placa.
La placa experimenta una fuerza externa que es su peso P, aplicado en su centro de masa C. Este peso ge- nera una torca con respecto al punto A y en conse-
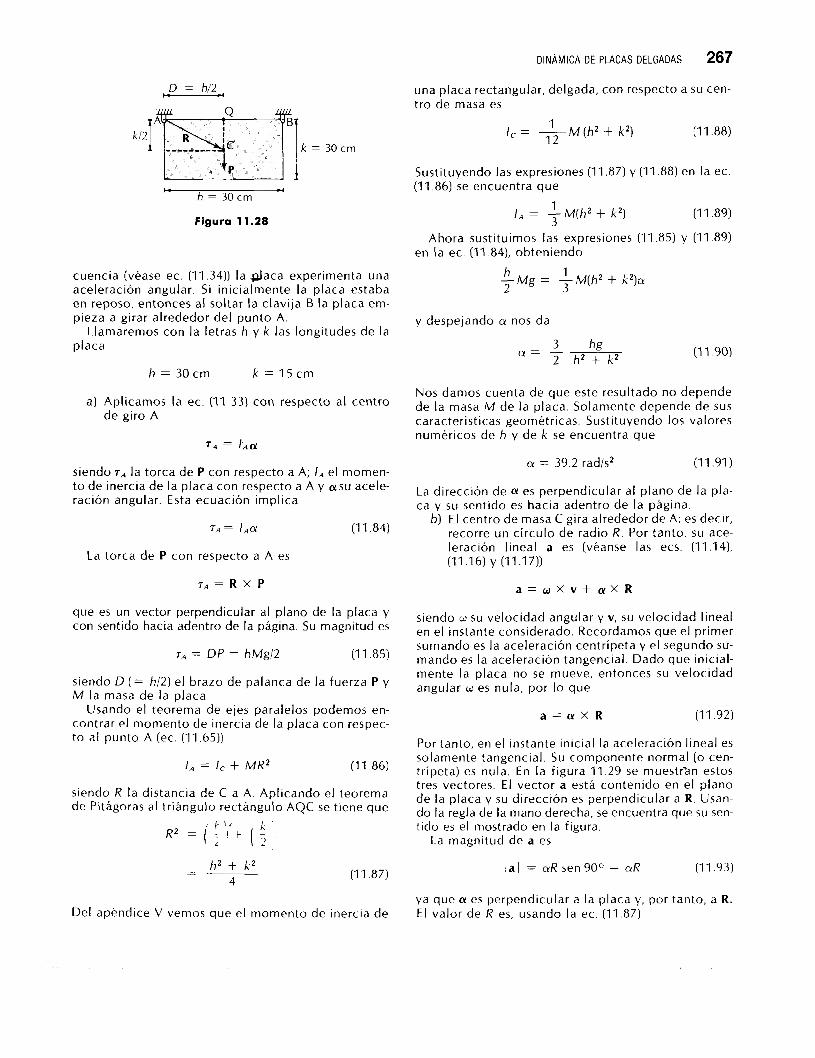
DINÁMICA DE PLACAS DELGADAS 267
D = h/2 - c u
h = 3 0 c m
Figura 11.28
cuencia (véase ec. (11.34)) la placa experimenta una aceleración angular. S i inicialmente la placa estaba en reposo, entonces al soltar la clavija B la placa em- pieza a girar alrededor del punto A.
Clamaremos con la letras h y k las longitudes de la placa
h = 3 0 c m k = 15cm
a) Aplicamos la ec. (11.33) con respecto al centro de giro A
siendo 7,4 la torca de P con respecto a A; la el momen- to de inercia de la placa con respecto a A y asu acele- ración angular. Esta ecuación implica
r A = l A ( Y (1 1.84)
La torca de P con respecto a A es
T A = R X P
que es un vector perpendicular al plano de la placa y con sentido hacia adentro de la página. Su magnitud es
7 A = D f = hMg/2 (1 1.85)
siendo D ( = h/2) el brazo de palanca de la fuerza P y M la masa de la placa.
Usando el teorema de ejes paralelos podemos en- contrar el momento de inercia de la placa con respec- to al punto A (ec. (11.65))
I, = I, + M R ~ (1 1.86)
siendo R la distancia de C a A. Aplicando el teorema de Pitágoras al triángulo rectángulo AQC se tiene que
- - h2 + k 2 4 (1 1.87)
Del apéndice V vemos que el momento de inercia de
una placa rectangular, delgada, con respecto a su cen- tro de masa es
1, = - M (h2 + k2) 1
1 2 (1 1.88)
Sustituyendo las expresiones (11.87) y (11.88) en la ec. (1 1.86) se encuentra que
/ A = 7 M ( h 2 + k2) I
(1 1.89)
Ahora sustituimos las expresiones (11.85) y (11.89) en la ec. (11.84), obteniendo
h -Mg -M(h2 + k2)a 1
2 3
y despejando LY nos da
3 hs 2 h2 + k 2
(y= - (1 I ,901
Nos damos cuenta de que este resultado no depende de la masa M de la placa. Solamente depende de sus características geométricas. Sustituyendo los valores numéricos de h y de k se encuentra que
a = 39.2 rad/s2 (11.91)
La dirección de a es perpendicular al plano de la pla- ca y su sentido es hacia adentro de la página.
b) E l centro de masa C gira alrededor de A; es decir,. recorre un círculo de radio R. Por tanto, su ace- leración lineal a es (véanse las ecs. (11.14), (11.16) y (11 .I 7))
a = w X v + a x R
siendo w su velocidad angular y v, su velocidad lineal en el instante considerado. Recordamos que el primer sumando es la aceleración centrípeta y el segundo su- mando es la aceleración tangencial. Dado que inicial- mente la placa no se mueve, entonces su velocidad angular o es nula, por lo que
a = a X R (11.92)
Por tanto, en el instante inicial la aceleración lineal es solamente tangencial. Su componente normal (o cen- trípeta) es nula. En la figura 11.29 se muestr'an estos tres vectores. E l vector a está contenido en el plano de la placa y su dirección es perpendicular a R. Usan- do la regla de la mano derecha, se encuentra que su sen- tido es el mostrado en la figura.
La magnitud de a es
la1 = aR sen 900 = aR (1 1.93)
va que 01 es perpendicular a la placa y. por tanto, a R. E l valor de K es, usando la ec. (11.87)
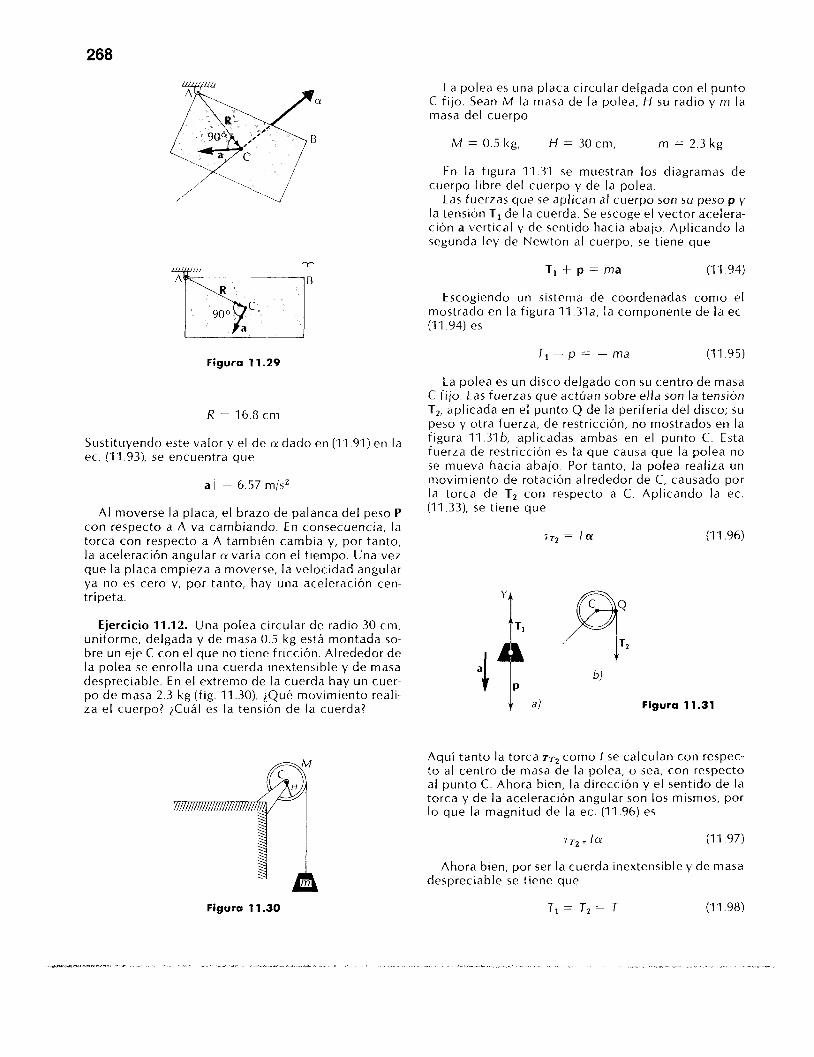
268
Figura 11.29
R = 16.8 cm
Sustituyendo este valor y el de a dado en (11.91) en Id ec. (11.93), se encuentra que
1 a I = 6.57 mis2
AI moverse la placa, el brazo de palanca del peso P con respecto a A va cambiando. En consecuencia, la torca con respecto a A también cambia y, por tanto, la aceleración angular a varía con el tiempo. Una vez que la placa empieza a moverse, la velocidad angular ya no es cero y, por tanto, hay una aceleración cen- trípeta.
Ejercicio 11.12. Una polea circular de radio 30 cm, uniforme, delgada y de masa 0.5 kg está montada so- bre un eje C con el que no tiene fricción. Alrededor de la polea se enrolla una cuerda inextensible y de masa despreciable. En el extremo de la cuerda hay un cuer- po de masa 2.3 kg (fig. 11.30). iQué movimiento reali-
La polea es una placa circular delgada con el punto C fi jo. Sean M la masa de la polea, H su radio y m la masa del cuerpo
M = 0.5 kg, H = 30 cm, m = 2.3 kg
En la f igura 11.31 se muestran los diagramas de cuerpo libre del cuerpo y de la polea.
Las fuerzas que se aplican al cuerpo son su peso p y la tensión T, de la cuerda. Se escoge el vector acelera- ción a vertical y de sentido hacia abajo. Aplicando la segunda ley de Newton al cuerpo, se tiene que
1, + p = ma (1 1.94)
Escogiendo un sistema de coordenadas como el mostrado en la figura 11.31a, la componente de la ec. (11.94) es
7 , - p = - m a (1 1.95)
La polea es un disco delgado con su centro de masa C fijo. Las fuerzas que actúan sobre elld son la tensión T,, aplicada en el punto Q de la periferia del disco; su peso y otra fuerza, de restricción, no mostrados en la figura 11.31b, aplicadas ambas en el punto C. Esta fuerza de restricción es la que causa que la polea no se mueva hacia abajo. Por tanto, la polea realiza un movimiento de rotación alrededor de C, causado por la torca de 1, con respecto a C. Aplicando la ec. (11.33), se tiene que
1 . q = I cy (1 1.96)
J. a) Figura 11.31 za el cuerpo? 2Cuál es la tensrón de la ”
cuerda?
Aquí tanto la torca TT, como I se calculan con respec- t o al centro de masa de la polea, o sea, con respecto al punto C. Ahora bien, la dirección y el sentido de la torca y de la aceleración angular son los mismos, por lo que la magnitud de la ec. (11.96) es
Figura 1 1.30
TT2 = la (1 1.97)
Ahora bien, por ser la cuerda inextensible y de masa despreciable se tiene que
7 , = T, = 7 (1 1.98)
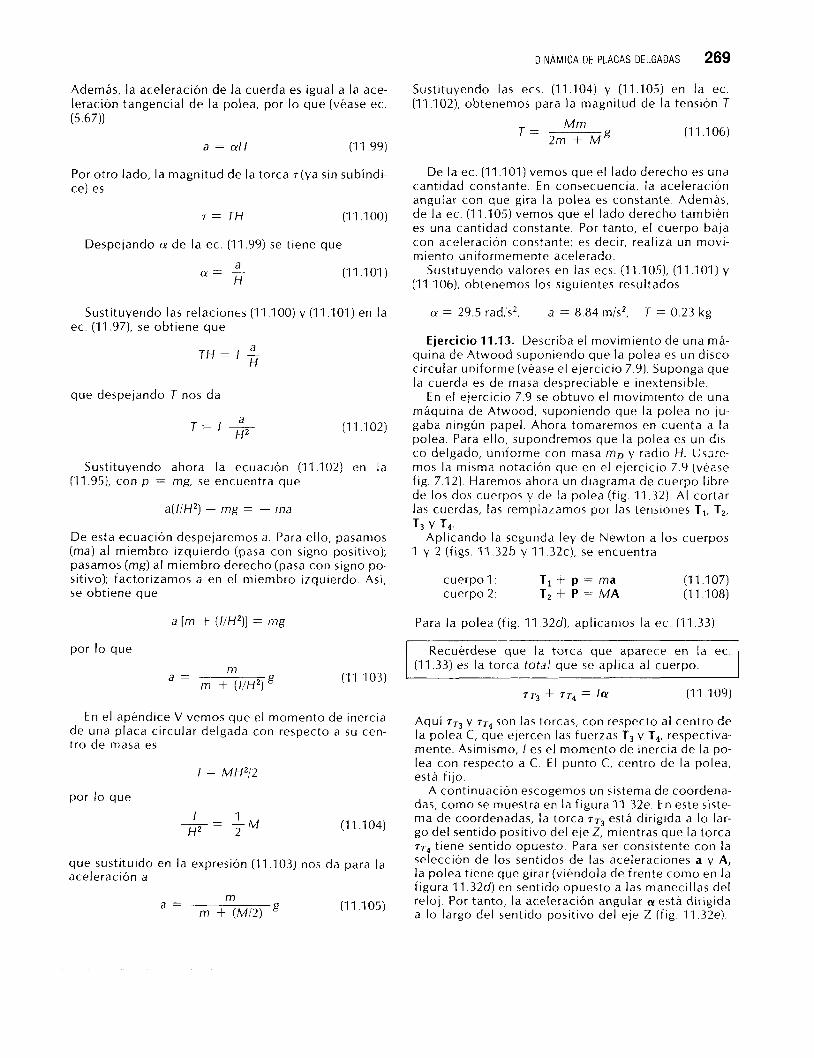
DINÁMICA DE PLACAS DELGADAS 269
Además, la aceleración de la cuerda es igual a la ace- leración tangencia1 de la polea, por lo que (véase ec. (5.67))
a = aH (1 1.99)
Por otro lado, la magnitud de la torca 7(ya sin subíndi- cel es
r = T H (1 1 .I 00)
Despejando (Y de la ec. (11.99) se tiene que
(Y= - a H (1 1 .I o1 )
Sustituyendo las relaciones (11.100) y (11.101) en la ec. (11.97), se obtiene que
T H = / - H J
que despejando
Sustituyendo (11.95), con p =
T nos da
T = / - a H2
(1 1 .I 02)
ahora la ecuación (11.102) en la mg, se encuentra que
a(/iH2) - mg = - rna
De esta ecuación despejaremos a. Para ello, pasamos (ma) al miembro izquierdo (pasa con signo positivo); pasamos (mg) al miembro derecho (pasa con signo po- sitivo); factorizamos a en el miembro izquierdo. Así, se obtiene que
a [m + [//Hz)] = mg
por lo que
(1 1 .I 03)
En el apéndice V vemos que el momento de inercia de una placa circular delgada con respecto a su cen- tro de masa es
I = MH2/2
por lo que / 1
Hz 2 " - - M (1 1 .I 04)
que sustituido en la expresión (11.103) nos da para la aceleración J
(1 1 .I 05)
Sustituyendo las ecs. (11.104) y (11.105) en la ec. ( l I . l02) , obtenemos para la magnitud de la tensión T
(1 1 .I 06)
De la ec. (11.101) vemos que el lado derecho es una cantidad constante. En consecuencia, la aceleración angular con que gira la polea es constante. Además, de la ec. (11.10.5) vemos que el lado derecho también es una cantidad constante. Por tanto, el cuerpo baja con aceleración constante; es decir, realiza un movi- miento uniforrnemente acelerado.
Sustituyendo valores en las ecs. (11.105), (11.101) y (11.106), obtenemos los siguientes resultados
(Y = 29.5 rad,", a = 8.84 mis2, T = 0.23 kg
Ejercicio 11.13. Describa el movimiento de una má- quina de Atwood suponiendo que la polea es un disco circular uniforme (véase el ejercicio 7.9). Suponga que la cuerda es de masa despreciable e inextensible.
En el ejercicio 7.9 se obtuvo el movimiento de una máquina de Atwood, suponiendo que la polea no ju- gaba ningún papel. Ahora tomaremos en cuenta a la polea. Para ello, supondremos que la polea es un dis- co delgado, uniforme con masa rnD y radio H. Ussre- mos la misma notación que en el ejercicio 7.9 (véase fig. 7.12). Haremos ahora un diagrama de cuerpo libre de los dos cuerpos y de la polea (fig. 11.32). Al cortar las cuerdas, las remplazamos por las tensiones TI, T,, 1 3 Y 1 4 .
Aplicando la segunda ley de Newton a los cuerpos 1 y 2 (figs. 11.32b y 11.32c), se encuentra
cuerpo 1 : 1, t p = ma (1 1 .I 07) cuerpo 2: 1, + P = MA (1 1 .I 08)
Para la polea (fig. 11 32d), aplicamos la ec. (11.33)
7r3 + 7T4 = /a (1 1 .I 09)
Aquí 773 y T~~ son las torcas, con respecto al centro de la polea C, que ejercen las fuerzas T3 y T,, respectiva- mente. Asimismo, / es el momento de inercia de la po- lea con respecto a C. El punto C. centro de la polea, está fijo.
A continuación escogemos un sistema de coordena- das, como se muestra en la figura 11.32e. En este siste- ma de coordenadas, la torca 7T3 está dirigida a lo lar- go del sentido positivo del eje Z, mientras que la torca 7T4 tiene sentido opuesto. Para ser consistente con la selección de los sentidos de las aceleraciones a y A, la polea tiene que girar (vikndola de frente como en la figura 11.32d) en sentido opuesto a las manecillas del reloj. Por tanto, la aceleración angular a está dirigida a lo largo del sentido positivo del eje Z (fig. 11.32e)
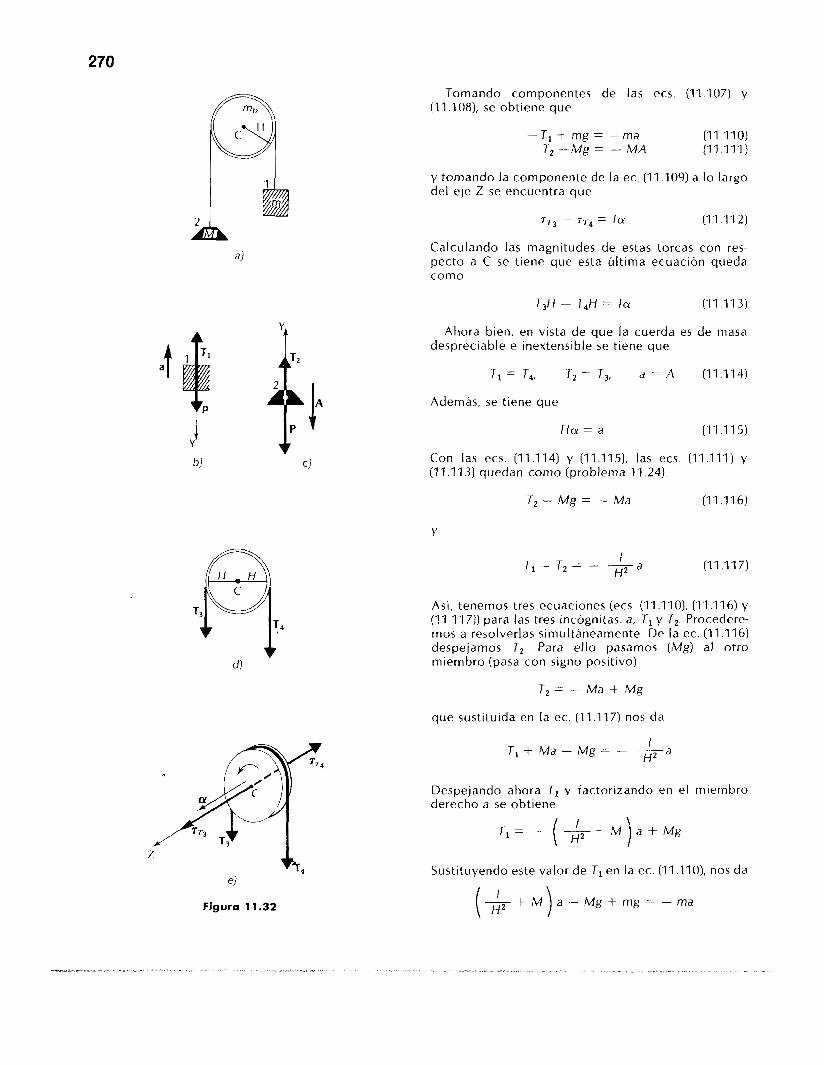
270
1.
dl
Z
Figura 1 1.32
Tomando componentes de las ecs. (11.107) y (11.108), se obtiene que
-T1 + mg = -ma (11.110) T2 " M g = - M A [11.111)
y tomando la componente de la ec. [11.109) a lo largo del eje Z se encuentra que
Calculando las magnitudes de estas torcas con res- pecto a C se tiene que esta última ecuación queda como
T3H - T,H la (1 1 .I 13)
Ahora bien, en vista de que la cuerda es de masa despreciable e inextensible se tiene que
Tl = T4, T, = T,, a = A (11.114)
Además, se tiene que
H a = a (1 1 .I 15)
Con las ecs. (11.114) y (11.115), las ecs. (11.111) y (11 .I 13) quedan como (problema 11.24).
1, - M g = - M a (11.116)
I T," T* = - - (1 1 .I 17) H z a
Así, tenemos tres ecuaciones (ecs. (11.110), (11.116) y (1 1 .I 17)) para las tres incógnitas: a, T , y T2. Procedere- mos a resolverlas simultáneamente. De la ec. (11.116) despejamos T,. Para ello pasamos (Mg) al otro miembro (pasa con signo positivo)
r, = - M a + Mg
que sustituida en la ec. (11.117) nos da
T , + M a - M g = - __ I
H z a
Despejando ahora TI y factorizando en el miembro derecho a se obtiene
Sustituyendo este valor de Tl en la ec. (11.110), nos da
b- ) + M a - M g + m g = - ma
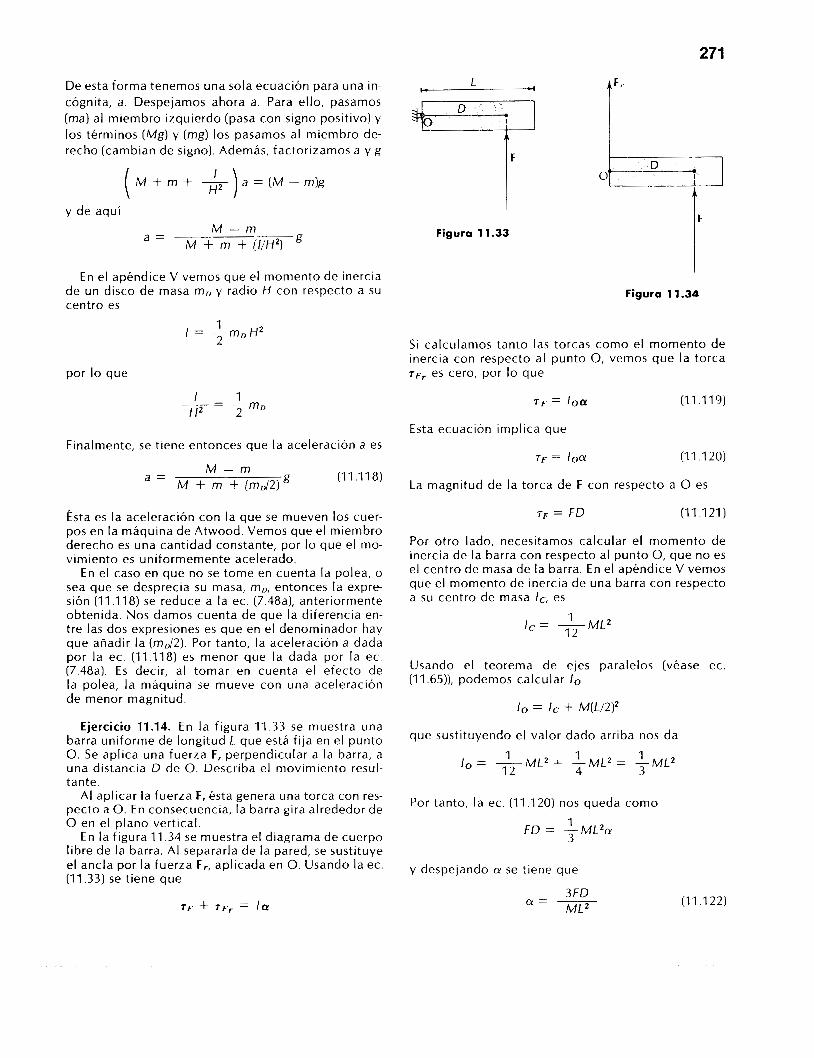
271
De esta forma tenemos una sola ecuación para una in- cógnita, a. Despejamos ahora a. Para ello, pasamos (ma) al miembro izquierdo (pasa con signo positivo) y los términos (Mg) y (mg) los pasamos al miembro de- recho (cambian de signo). Además, factorizamos a y g
y de aquí
a = M - m M + m + ///Hz) g
En el apéndice V vemos que el momento de inercia de un disco de masa mu y radio H con respecto a su centro es
1 2 I = -muHz
por lo que
Finalmente, se tiene entonces que la aceleración a es
a = M - m
M + m + (m,/2) (1 1 .I 18)
ÉSta es la aceleración con la que se mueven los cuer- pos en la máquina de Atwood. Vemos que el miembro derecho es una cantidad constante, por lo que el mo- vimiento es uniformemente acelerado.
En el caso en que no se tome en cuenta la polea, o sea que se desprecia su masa, m,, entonces la expre- sión (11.118) se reduce a la ec. (7.48a), anteriormente obtenida. Nos damos cuenta de que la diferencia en- tre las dos expresiones es que en el denominador hay que añadir la (md2). Por tanto, la aceleración a dada por la ec. (11.118) es menor que la dada por la ec. (7.48a). Es decir, al tomar en cuenta el efecto de la polea, la máquina se mueve con una aceleración de menor magnitud.
Ejercicio 11.14. En la figura 11.33 se muestra una barra uniforme de longitud L que está fija en el punto O. Se aplica una fuerza F, perpendicular a la barra, a una distancia D de O. Describa el movimiento resul- tante.
Al aplicar la fuerza F, ésta genera una torca con res- pecto a O. En consecuencia, la barra gira alrededor de O en el plano vertical.
En la figura 11.34 se muestra el diagrama de cuerpo libre de la barra. AI separarla de la pared, se sustituye el ancla por la fuerza F, , aplicada en O. Usando la ec. (11.33) se tiene que
7 F + 7 F r = I @
L c -I 4 F r
t
Figura 1 1.33
Figura 1 1.30
Si calculamos tanto las torcas como el momento de inercia con respecto al punto O, vemos que la torca 7Fr es cero, por lo que
Esta ecuación implica que
TF = lock! (1 1 .I 20)
La magnitud de la torca de F con respecto a O es
TF FD (11.121)
Por otro lado, necesitamos calcular el momento de inercia de la barra con respecto al punto O, que no es el centro de masa de la barra. En el apéndice V vemos que el momento de inercia de una barra con respecto a su centro de masa IC, es
IC = - ML2 12 I
Usando el teorema de ejes paralelos (véase ec. (11.65)), podemos calcular l o
lo = IC + M(L/2)*
que sustituyendo el valor dado arriba nos da 1 1 1
12 4 3 l o = - ML2 + -ML2 = -ML2
Por tanto, la ec. (11 .I 20) nos queda como 1
FD = - ML2a 3
y despejando Q se tiene que
3 FD ML2
o(= ~ (1 1 .I 22)
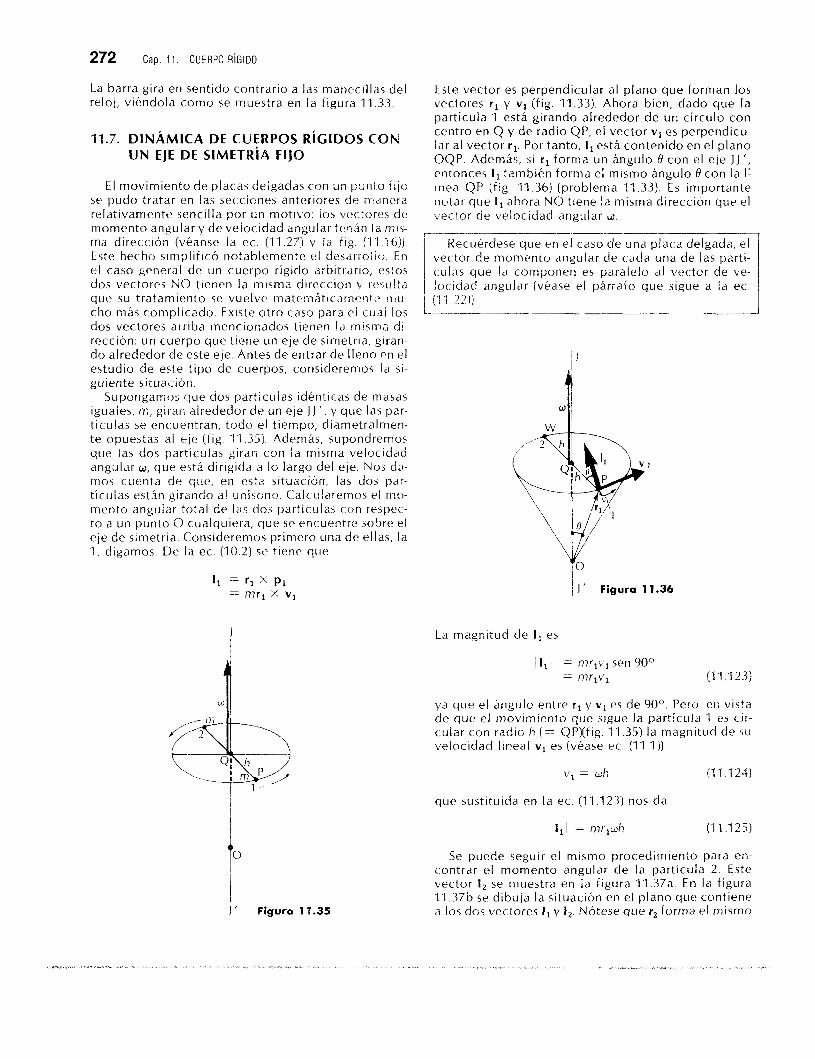
272 Cap. 11. CUERPO R h D O
La barra gira en sentido contrario a las manecillas del reloj, viéndola como se muestra en la figura 11.33.
11.7. DINÁMICA DE CUERPOS RíGIDOS CQN UN EJE DE SIMETK~A FIJO
E l movimiento de placas delgadas con u n punto ti jo se pudo tratar en las secciones anteriores de mdnera relativamente sencilla por un motivo: los vectores de momento angular y de velocidad angular tenán i a mis- ma dirección (véanse la ec. (11.271 v l a tig. (11 16)j. tste hecho simplif icó notablemente? el de~arro i io . En el caso general de un cuerpo rígido arbitrarlo, estos dos vectores NO tienen la misma dirección y res~!lta que su tratamiento se vuelve matemáticd!ne,?t:~~ m u - cho más complicado. Existe otro caso para el cual los dos vectores arriba mencionados tienen 1'1 misma di- rección: un cuerpo que tiene un eje de simetría, gtran- do alrededor de este eje. Antes de entrar de lleno en el estudio de este tipo de cuerpos, consideremos la s i - guiente situación
Supongamos que dos partículas idénticas de Inasas iguaies, m, giran alrededor de un ele Ji I , y que las par- tículas se encuentran, todo el tiempo, diametralmen- te opuestas al eje (fig. 11.75). Ademas, supondremos que las dos partículas giran con Ía misma velocidad anguldr U, que está dirigida a lo largo del eje. Nos C ~ J -
nos cuenta de que, en esta situación, las dos par- tículas estin girando al unisono. CaÍcularemos el mo- mento anguiar total de las dos partículas ron respec- to a un punto 0 cualquiera, qt!e se encuentre sobre el eje de simetría. Consideremos primero una de ellas, l a 1 , digamos. De la ec. (10.2) se tiene que
I , r- rl X pt = mr, X v,
J
to I I ' figura 11.35
Este vector es perpendicular al piano que forman los vectores r , y v1 (fig. 11.33). Ahora bien, dado que la partícula 1 está girando alrededor de un círculo con centro en Q y de radio Q P , el vector v1 es perpendicu-. Íar al vector r , . Por tanto, I, está contenido en el plano OQP. Ademhs, si rl forma un ángulo 8 con el eje J J ', entonces I, también forma e¡ mismo ángulo 8 con la I: !nea QP (fig. 11.36) (problema 11.33). Es importante notar que I, ahora NO ttene la misma dirección que el vector de veiocidad argu la r w.
~~
Kecu6rdese que en PI caso de una vector de momento angular de cada una de las parti- culas que Id componen es paralelo al vector de ve- locidad angui<u (vease el párrafo que sigue a la ec. (1 1 .22) ]
La magnitud de I, es
~ I, j = mrlv l sen 90" = r n r l v l (1 1 .I 23)
ya que el ángulo entre r1 y v1 es de 90". Pero en vista de q u e el movimiento que sigue la particula I e5 c i r - cular con radio h ( = QP)(fig. 11.35) la magnitud de ? u velocidad lineal v, es (véase ec (Il.1j)
v , = wh i l l 124)
que 5ustituicla en la ec. (11.123) nos da
~ I , ~ = mr,wh (I I .I 25)
Se puede seguir e l mismo procedimiento para en- contrar el momento angular de la partícula 2. Este vector I , se muestra en la figura 11.37a. Fn la figura 11 ..37b se dibuja la situación en el plano que contiene n los das vectores 1, y I,. Nbtese que rz forma el mismo
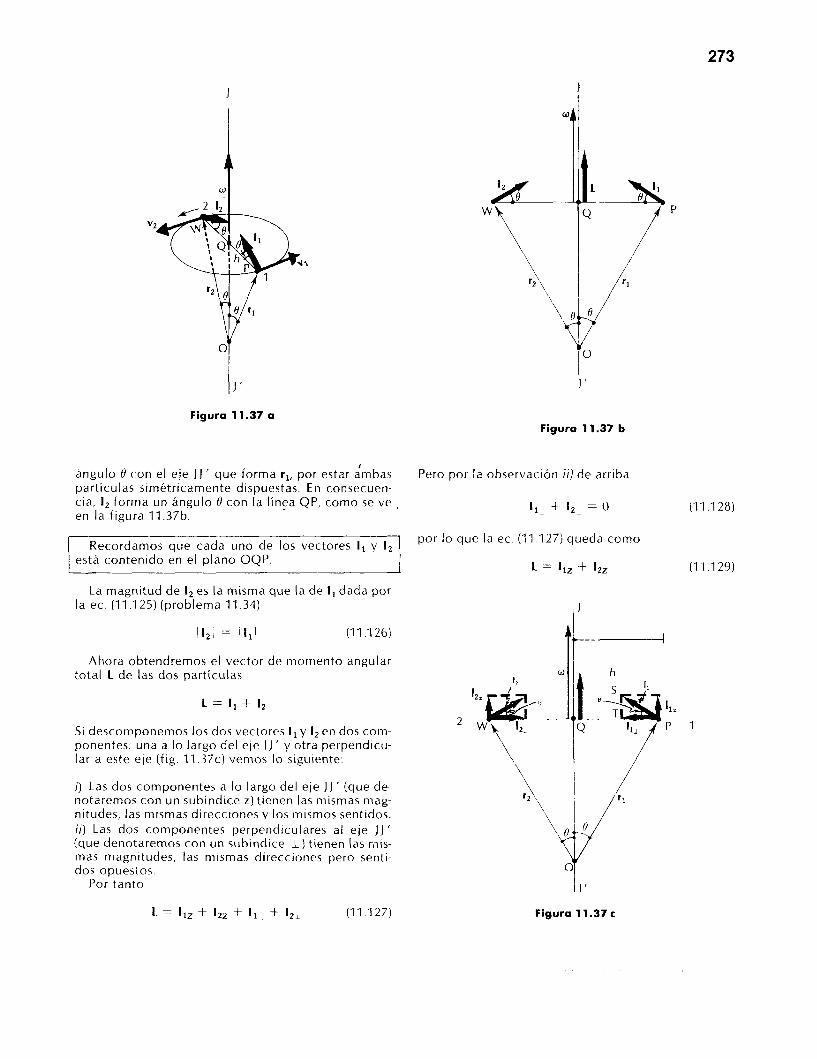
273
J
I J '
Figura 11.37 a Figura 11.37 b
angulo 0 con el eje J J ' que forma r,, por estar imbas Pero por la observación ii] de arribd partículas simétricamente dispuestas. En consecuen- cia, I , forma un ángulo 0 con la línea QP, como se ve en la figura 11.37b.
I,, + 12, = u
Recordamos que cada uno de los vectores I, y l2 por lo que la ec. (11.127) queda como
está contenido en el plano OQP. 1 = I , , + lzz
La magnitud de I, es la misma que la de I , dada por la ec. (11 .I 25) (problema 11.34)
1121 = i l l 1 (1 1 .I 26)
Ahora obtendremos el vector de momento angular total L de las dos partículas
L = I , + 1 2
Si descomponemos los dos vectores I, y I, en dos com- ponentes: una a lo largo del eje J J ' y otra perpendicu- lar a este eje (fig. 11.37cj vemos lo siguiente: /
\ i ) Las dos componentes a lo largo del eje J J ' (que de- notaremos con un subíndice z) tienen las mismas mag- nitudes, las mismas direcciones y los mismos sentidos. i i ) Las dos componentes perpendiculares al eje J J ' (que denotaremos con un subíndice I) tienen las m is - mas magnitudes, las mismas direcciones pero senti- dos opuestos.
Por tanto
L = I , , + 12, + I l L + I,, (1 1 .I 27)
(1 1 .I 28)
(1 1 .I 29)
( I '
Figura 11.37 c
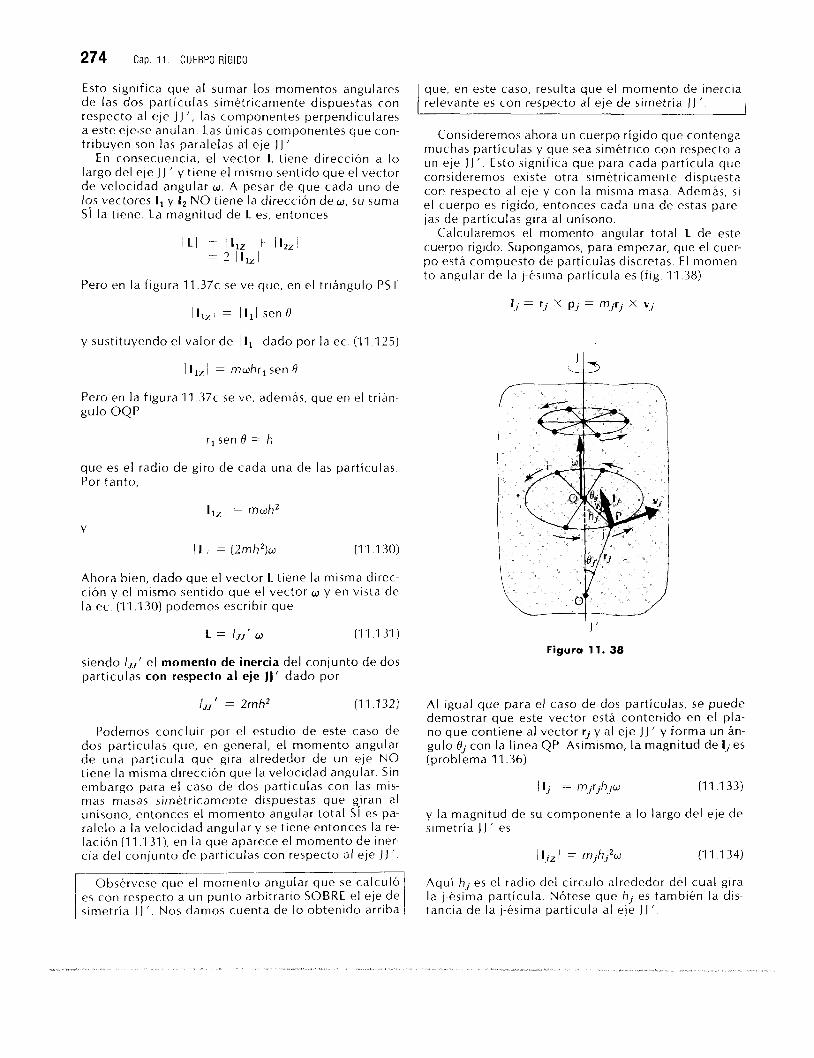
274 Cap. 11. CUERPO RíGIDO
Esto significa que al sumar los momentos angulares de las dos particulas simétricamente dispuestas con respecto al eje J J ', las componentes perpendiculares a este ejease anulan. Las únicas componentes que con- tribuyen son las paralelas a'l eje J J '
En consecuencia, el vector L tiene dirección a lo largo del eje J J ' y tiene el mismo sentido que el vector de velocidad angular W . A pesar de que cada uno de Iqs vectores I , y I, NO tiene la dirección de U , su suma SI la tiene. La magnitud de L es, entonces
i l l = ~ l , z l + l I z z ! = 2 lI,,l
Pero en la figura 1 1 . 3 7 ~ se ve que, en el triángulo PST
I D l z ! = ; I l l sen H
y sustituyendo el valor de 1 I , 1 dado por la ec. (11 .I 25)
1 I I z i = mohr, sen 6
Pero en la figura 11 37c se ve, además, que en el trián- gulo OQP
r , sen 0 = h
que es el radio de giro de cada una de las partículas Por tanto,
l I lZ l = mwh2 Y
I L 1 = (2mb2)w (1 1 .I 30)
Ahora bien, dado que el vector L tiene la misma direc- ción y el mismo sentido que el vector w y en vista de la ec. (11.130) podemos escribir que
L = IJJ' w (1 I .I 31)
siendo IJJ' el momento de inercia del conjunto de dos partículas con respecto al eje j j ' dado por
iJJ' = 2mh2 (I 1 .I 32)
Podemos concluir por el estudio de este caso de dos particulas que, en general, el momento angular de una partícula que gira alrededor de un eje NO tiene la mlsma dirección que la velocidad angular. Sin embargo para el caso de dos partículas con las mis- mas masas simétricamente dispuestas que gjran al unísono, entonces el momento angular total SI es pa- ralelo a la velocidad angular y se tiene entonces la re- lación (11 .I 31), en la que aparece el momento de iner- cia del conjunto de partículas con respecto al eje J J I .
1 Obsérvese que el momento angular es con respecto a un punto arbitrario SOBRE el eje de simetria J J I . Nos damos cuenta de lo obtenido arriba
que, en este caso, resulta que el momento de inercia relevante es con respecto al eje de simetría J J '.
Consideremos ahora un cuerpo rígido que contenga muchas particulas y que sea simétrico con respecto a un eje J J ' . Esto significa que para cada partícula que consideremos existe otra simétricamente dispuesta con respecto al eje y con la misma masa Además, si el cuerpo es rigido, entonces cada una de estas pare- jas de partículas gira al unísono.
Calcularemos el momento angular total L de este cuerpo rigido. Supongamos, para empezar, que el cuer- po está compuesto de partículas discretas. E l momen- to angular de la j-ésima partícula es (fig. 11.38)
I ] ' Figura 11. 38
AI igual que para el caso de dos partículas, se puede demostrar que este vector está contenido en el pla- no que contiene al vector rj y al eje J J ' y forma un án- gulo 19, con la linea QP. Asimismo, la magnitud de l j es (problema 11.36)
I I j I = mjfjhjo (1 1 .I 33)
y la magnitud de su componente a lo largo del eje de simetría J J ' es
1 Ij, 1 = mjh+ (I 1 .I 34)
Aquí bj es el radio del círculo alrededor del cual gira la j-ésima partícula. Nótese que hj es también la dis- tancia de la j-ésima partícula al eje J J '
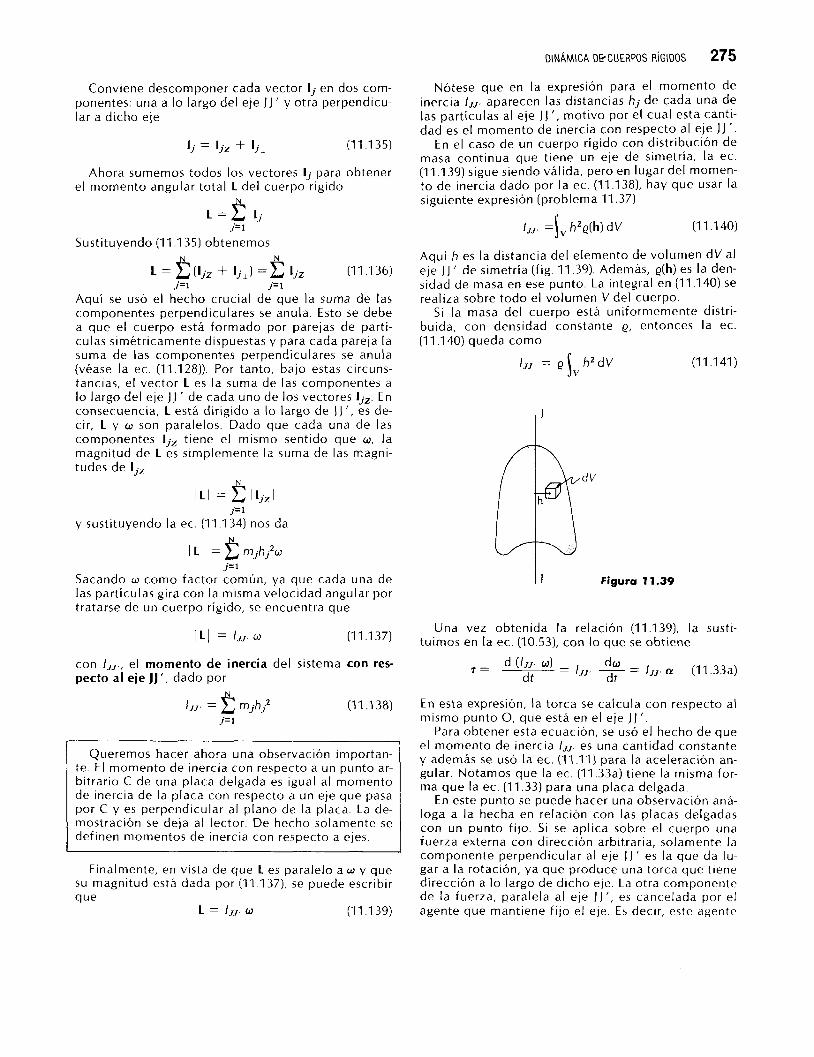
DINÁMICA DPCUERPOS RíGIDOS 275
Conviene descomponer cada vector I j en dos com- ponentes: una a lo largo del eje J J ’ y otra perpendicu- lar a dicho eje
I j = l j z + I j , (1 1 .I 35)
Ahora sumemos todos los vectores I jpara obtener el momento angular total L del cuerpo rlgido
L = 2 I j j=1
Sustituyendo (11 .I 35) obtenemos N
L = f: ( I j z + l j L ) = l j z (1 1 .I 36) j=1 j = 1
Aquí se usó el hecho crucial de que la suma de las componentes perpendiculares se anula. Esto se debe a que el cuerpo está formado por parejas de partí- culas simétricamente dispuestas y para cada pareja la suma de las componentes perpendiculares se anula (véase la ec. (11.128)). Por tanto, bajo estas circuns- tancias, el vector L es la suma de las componentes a lo largo del eje J J ‘ de cada uno de los vectores I j z . En consecuencia, L está dirigido a lo largo de J J ’, es de- cir, l y w son paralelos. Dado que cada una de las componentes l j z tiene el mismo sentido que w , la magnitud de L es simplemente la suma de las magni- tudes de l j z
N
I L I = / l . j z l j = 1
y sustituyendo la ec. (11 .I 34) nos da N
I1 I = rnjhj2w j= 1
Sacando w como factor común, ya que cada una de las partículas gira con la misma velocidad angular por tratarse de un cuerpo rígido, se encuentra que
111 = I J J , 0 (1 1 .I 37)
con / J J s , el momento de inercia del sistema con res- pecto al eje JJ ’, dado por
IJJ, = f: mjhj2 (1 1 .I 38) $1
Queremos hacer ahora una observación importan- te. E l momento de inercia con respecto a un punto ar- bitrario C de una placa delgada es igual al momento de inercia de la placa con respecto a un eje que pasa por C y es perpendicular al plano de la placa. La de- mostración se deja al lector. De hecho solamente se definen momentos de inercia con respecto a ejes.
Finalmente, en vista de que L es paralelo a w y que su magnitud está dada por (11.137). se puede escribir que
L /JJ, (1 1 .I 39)
Nótese que en la expresión para el momento de inercia /JJ? aparecen las distancias h j de cada una de las partículas al eje J J ’, motivo por el cual esta canti- dad es el momento de inercia con respecto al eje J J ’ .
En el caso de un cuerpo rígido con distribución de masa continua que tiene un eje de simetría, la ec. (11.139) sigue siendo válida, pero en lugar del momen- to de inercia dado por la ec. (11.138), hay que usar la siguiente expresión (problema 11.37)
(1 1 .I 40)
Aquí h es la distancia del elemento de volumen dV al eje J J ’ de simetría (fig. 11.39). Además, e(h) es la den- sidad de masa en ese punto. La integral en (11.140) se realiza sobre todo el volumen V del cuerpo.
S i la masa del cuerpo está uniformemente distri- buida, con densidad constante e , entonces la ec. (11.140) queda como
/JJ, = e h2 dV (11.141) V
I ’
I , Figura 1 1.39
Una vez obtenida la relación (11.139), la susti- tuimos en la ec. (10.53), con lo que se obtiene
7 = (11.33a)
En esta expresión, la torca se calcula con respecto al mismo punto O, que está en el eje J J ’ .
Para obtener esta ecuación, se usó el hecho de que el momento de inercia /JJ, es una cantidad constante y además se usó la ec. (11.11) para la aceleración an- gular. Notamos que la ec. (11.33a) tiene la misma for- ma que la ec. (1 1.33) para una placa delgada.
En este punto se puede hacer una observación aná- loga a la hecha en relación con las placas delgadas con un punto f i jo. Si se aplica sobre el cuerpo una fuerza externa con dirección arbitraria, solamente la componente perpendicular al eje J J ’ es la que da Iu- gar a la rotación, ya que produce una torca que tiene dirección a lo largo de dicho eje. La otra componente de la fuerza, paralela al eje J J ‘, es cancelada por el agente que mantiene fijo el eje. E 5 decir, este agente
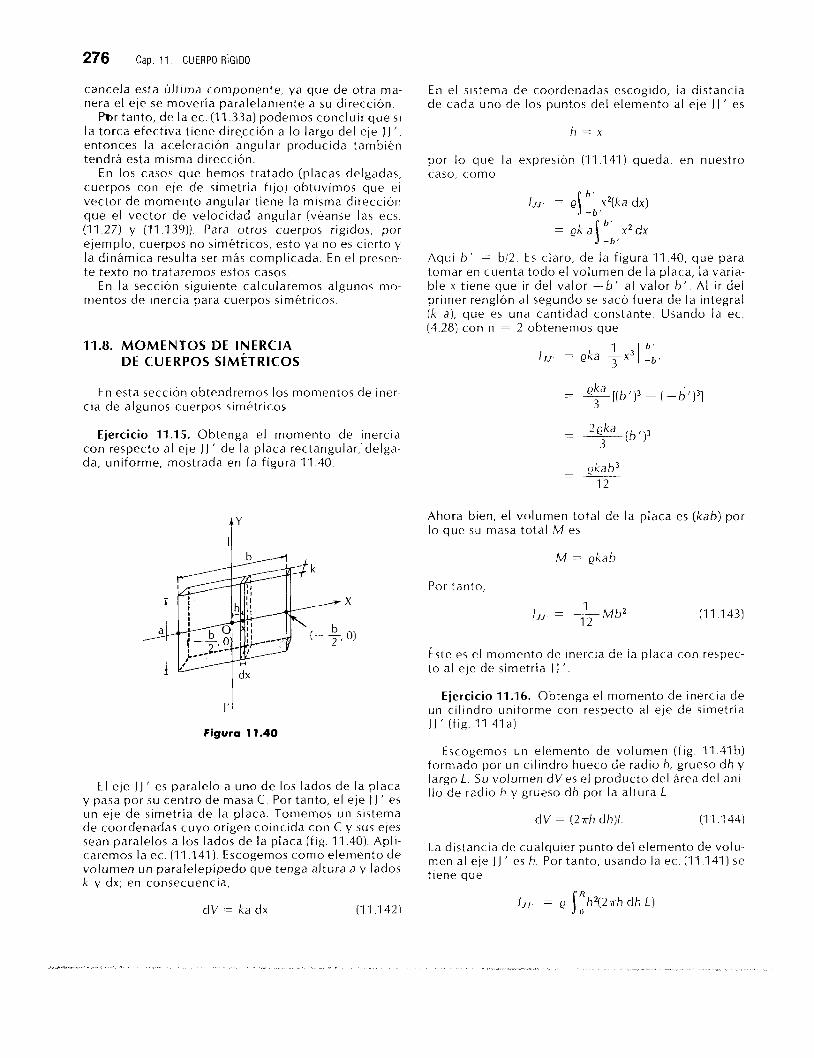
276 Cap. 11 . CUERPO R ~ G I D O
cancela esta última componente, ya que de otra ma- nera el eje se movería paralelamente a su dirección.
Pbr tanto, de la ec. (11.33a) podemos concluir que SI la torca efectiva tiene dirqcción a lo largo del eje J J I ,
entonces la aceleración angular producida también tendrá esta misma dirección.
En los casos que hemos tratado (placas delgadas, cuerpos con eje de simetría fijo) obtuvimos que e l vector de momento angular tiene l a misma dirección que el vector de velocidad angular (véanse las ecs (11.27) y (11.139)). Para otros cuerpos rígidos, por ejemplo, cuerpos no simétricos, esto ya no es cierto y la dinámica resulta ser más complicada. En e l presen- te texto no trataremos estos casos.
En la secci6n siguiente calcularemos algunos mo- mentos de inercia para cuerpos simétricos
11.8. MOMENTOS DE INERCIA DE CUERPOS SIMÉTRICOS
En esta sección obtendremos los momentos de iner- cia de algunos cuerpos simktricos.
Ejercicio 11.15. Obtenga e l momento de inercia con respecto al eje J J ' de la placa rectangular,'delga- da, uniforme, mostrada en la figura 11.40.
I '
Figura 1 1.40
E l eje J J ' es paralelo a uno de los lados de la placa y pasa por su centro de masa C. Por tanto, el eje J J ' es un eje de simetría de la placa. Tomemos un sistema de coordenadas cuyo origen coincida con C y sus ejes sean paralelos a los lados de la placa (fig. 11.40). Apli- caremos l a ec. (11.141). Escogemos como elemento de volumen un paralelepípedo que tenga altura a y lados k y dx; en consecuencia,
dV = k a dx (1 1 .I 421
En el sistema de coordenadas escogido, ¡a distancia de cada uno de los puntos del elemento al eje J J ' es
h = x
por lo que la expresión (11.141) queda, en nuestro caso, como
/J.T = e\ ?(ka dx) b'
- b '
= e k a i x2dx b'
-b'
Aqui b ' = bi2. Es claro, de la figura 11.40, que para tonlar en cuenta todo el volumen de l a placa, la varia- ble .x tiene que ir del valor "b' al valor b' AI ir del primer renglón al segundo se sacó fuera de la integral (k a) , que es una cantidad constante. Usando la ec. (4.28) con n = 2 obtenemos que
( - - d I 133
Ahora bien, el volumen total de la piaca es (kab) por lo que su masa total M es
M = @kah
Por tanto,
i s t e es el momento de inercia de la placa con respec- to al eje de simetría J J I .
Ejercicio 11.16. Obtenga el momento de inercia de un cilindro uniforme con respecto al eje de simetría J J ' (fig. 11.41 a).
Escogemos un elemento de volumen (fig 11.41 b) formado por un clllndro hueco de radio h, grueso dh y largo L. Su volumen dVes el producto del área del ani- llo de radio h y grtieso dh por la altura L
dV = (27rh dh)L (1 1 .I 44)
La distancia de cualquier punto del elemento de volu- men al eje J J ' es h. Por tanto, usando la ec. (11.141) se tiene que
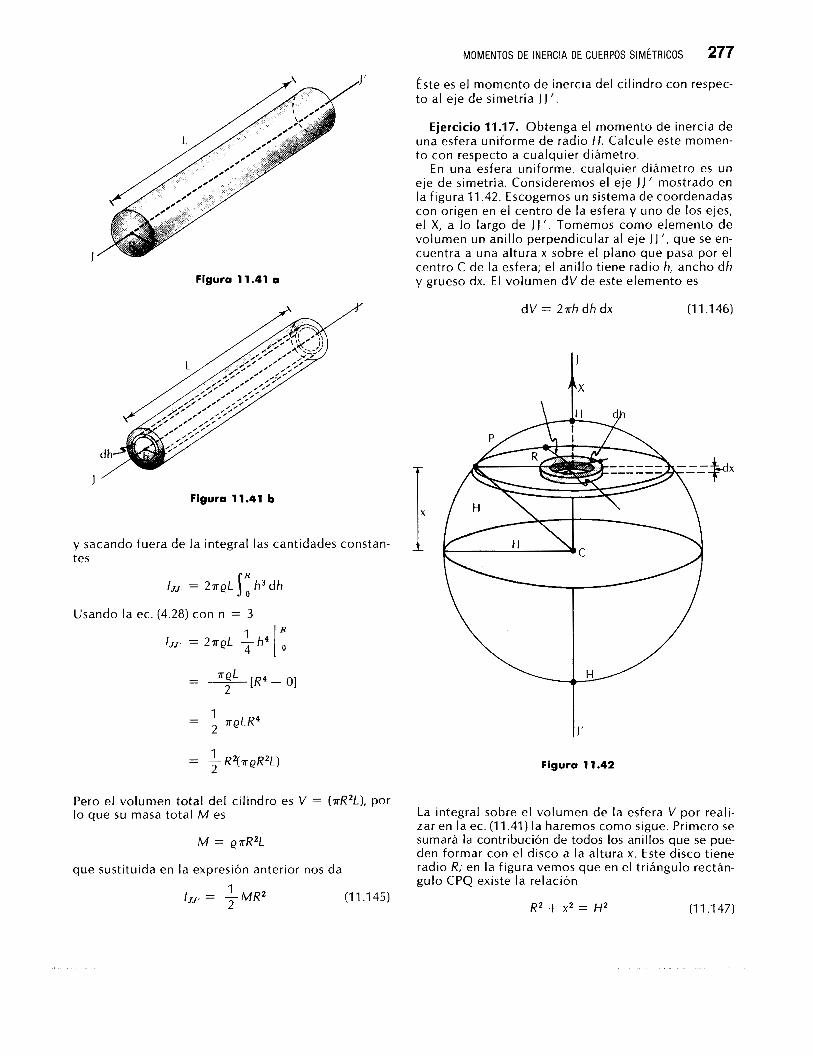
Figura 1 1.41 a
Figura 11.41 b
y sacando fuera de la integral las cantidades constan- tes
= - + ~ 4 1 2
= R2(*eR21) I
Pero el volumen total del ci l indro es V = (aR2L), por lo que su masa total M es
M = eaR2L
que sustituida en la expresión anterior nos da
/ J J r = - MR2 1 2 (1 1 .I 45)
MOMENTOS DE INERCIA DE CUERPOS SIMÉTRICOS 277 Éste es el momento de inercia del cilindro con respec- to al eje de simetría J J ’.
Ejercicio 11.17. Obtenga el momento de inercia de una esfera uniforme de radio H. Calcule este momen- to con respecto a cualquier diámetro.
En una esfera uniforme, cualquier diámetro es un eje de simetría. Consideremos el eje J J ’ mostrado en la figura 11.42. Escogemos un sistema de coordenadas con origen en el centro de la esfera y uno de los ejes, el X, a lo largo de J J ’ . Tomemos como elemento de volumen un anillo perpendicular al eje J J ’, que se en- cuentra a una altura x sobre el plano que pasa por el centro C de la esfera; el anillo tiene radio h, ancho dh y grueso dx. E l volumen dV de este elemento es
dV = 2ah dh dx (1 1 .I 46)
I J ’
Figura 1 1.42
La integral sobre el volumen de la esfera V por reali- zar en la ec. (11.41) la haremos como sigue. Primero se sumará la contribución de todos los anillos que se pue- den formar con el disco a la altura x. Este disco tiene radio R; en la figura vemos que en el triángulo rectán- gulo CPQ existe la relación
R2 + x2 = Hz (1 1 .I 47)

278 CaD. 11. CUERPO RíGIDO
Una vez efectuada la integral sobre el disco, suma- que despejando e da mos las contribuciones de todos los discos en que se puede descomponer la esfera. Por tanto, sustituyendo (11.146) en I? ec. (11.141) obtenemos que e = m 3 M
R IJJ, = e jyHj o h2(27rh dh dx) (11.148) y sustituyendo en la ec. (11.149) se obtiene
En esta integral, los límites se toman como sigue: la 8íT 3 variable h va de O a R (así se integra primero sobre el disco de radio R); la integral sobre x va de "H a H (así se integra sobre todos /os posibles discos). Efectuare- ~ i ~ ~ l , ~ ~ ~ ~ ~ , esta queda mos primero la integral sobre h. Usando la ec. (4.28)
1JJ _ _ X - " H 5 1 5 4 r H 3
con n = 3 se tiene que
= dx [R4 - O] H
2 -H
Ahora expresamos R en términos de x, usando la ec. (11.147). Despejamos R 2 y elevamos al cuadrado
R4 = (Hz - x2)2
= H4 - 2H2x2 + x4
Por tanto,
/.N, = S" dx [H4 - 2H2 X' + x4] 2 -H
Ahora usamos el hecho de que la integral de una su- ma es la suma de las integrales; además, sacamos de cada una de las integrales las cantidades constantes (recuérdese que H, el radio de la esfera, es constante) y usamos la ec. (4.28) en cada integral, obteniendo
- (-HI3] 4- -[H5 - (-H)5] 1 S
(1 1 .I 49)
Éste es el momento de inercia de una esfera con res- pecto a un diámetro.
11.9. T R A S L A C I ~ N Y R O T A C I ~ N DE CUERPOS R ~ G I D O S
En las secciones anteriores estudiamos dos casos: el movimiento de una placa delgada, rígida con un pun- to f i j o y el movimiento de un cuerpo rígido que t iene un eje de simetría f i jo que coincide con el eje de rota- ción. En ambos casos el movimiento resultaba ser una rotación: en el primer caso alrededor del punto fijo y en el segundo caso alrededor del eje de simetría. Res- pecto de este último caso, es importante notar que debido a que el eje de simetría pasa por el centro de masa del cuerpo, entonces este punto está fijo, ya que el eje de simetría lo está. E s decir, en este caso el centro de masa del cuerpo rígido permanece en reposo.
En esta sección consideraremos los dos tipos de cuerpos ya estudiados (placas delgadas y cuerpos si - métricos), quitando la restricción de que un punto permanezca fijo. Sin embargo, nos restringiremos so- lamente al caso en el que el eje de rotación siempre tenga una dirección fija.
En la sección 9.2 se demostró que, para cualquier sistema de partículas, la fuerza externa total aplicada daba lugar a una traslación del centro de masa con una aceleración dada por la ec. (9.31). Naturalmente que este resultado es válido para el caso particular de un cuerpo rígido
Por otro lado, s i las fuerzas externas son tales que la torca externa total con respecto al centro de masa no se anula, entonces el momento angular con respec- to al centro de masa cambia con el tiempo (véase ec (10.96)). En consecuencia, una torca externa no nula genera un movimiento con respecto al centro de ma- sa. Este resultado también es vál ido Dara un sistema
por otro lado, la totG( M de l a esfera es igual al arbitrario de Partículas, aunque no sea un cuerpo producto de la densidad e por su volumen V ( = rígido. 4sH3,'3) En el caso particular de un cuerpo rígido, si la torca
externa no es nula, esta genera un movimiento alrede- dor del centro de masa, y por tratarse de un cuerpo rí-
3 sido la única posibilidad es que sea una rotación. En 4 M = - rH3 e
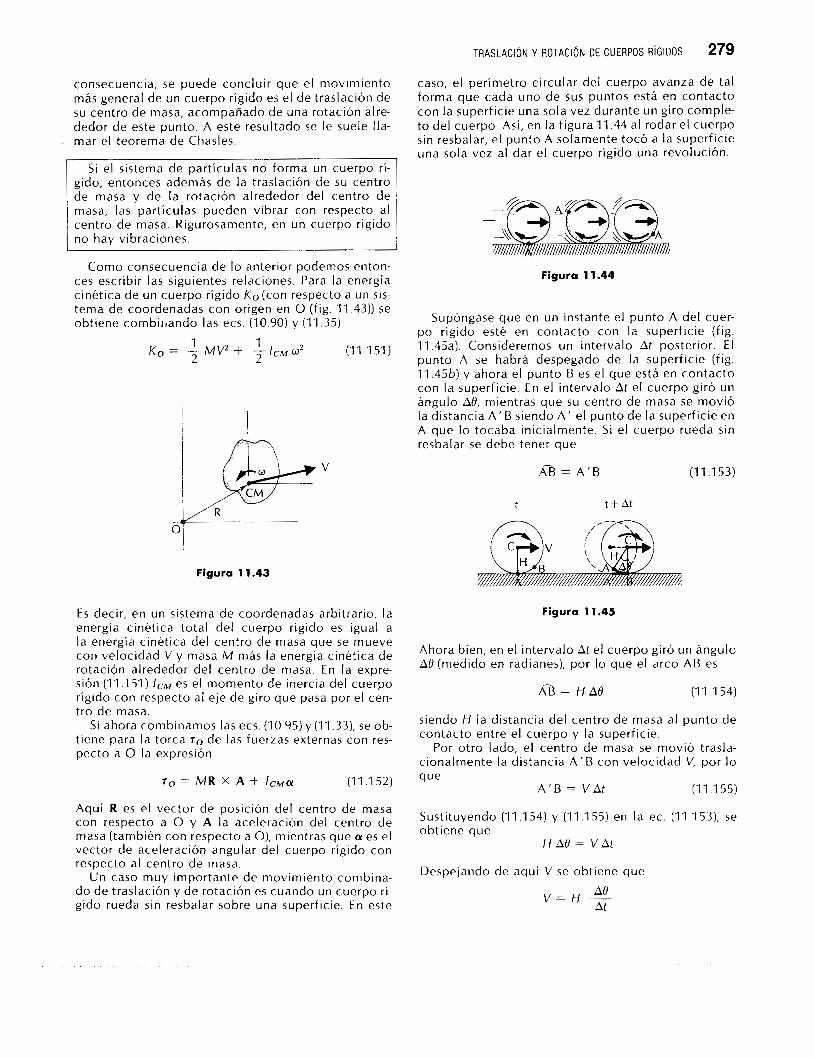
TRASLACIóN Y ROTACIóN DE CUERPOS RíGIDOS 279
consecuencia, se puede concluir que el movimiento caso, el perímetro circular del cuerpo avanza de tal más general de un cuerpo rígido es el de traslación de forma que cada uno de sus puntos está en contacto su centro de masa, acompañado de una rotación alre- con la superficie una sola vez durante un giro comple- dedor de este punto. A este resultado se le suele Ila- to del cuerpo. Así, en la f igura 11.44 al rodar el cuerpo mar el teorema de Chasles. sin resbalar, el punto A solamente tocó a la superficie
una sola vez al dar el cuerpo rígido una revolución. S i el sistema de partículas no forma un cuerpo rí-
gido, entonces además de la traslación de su centro de masa y de la rotación alrededor del centro de masa, las partículas pueden vibrar con respecto al centro de masa. Rigurosamente, en un cuerpo rígido no hay vibraciones.
Como consecuencia de lo anterior podemos enton- ces escribir las siguientes relaciones. Para la energía Figura 1 1.44 cinética de un cuerpo rígido Ko(con respecto a un s is- tema de coordenadas con origen en O (fig. 11.43)) se obtiene combirtando las ecs. (10.90) y (11.35) Supóngase que en un instante el punto A del cuer-
PO rígido esté en contacto con la superficie (fig. (11,151) 11.45a). Consideremos un intervalo At posterior. E l
11.45b) y ahora el punto B es el que está en contacto con la superficie. En el intervalo At el cuerpo giró un
la distancia A'B siendo A' el punto de la superficie en A que lo tocaba inicialmente. S i el cuerpo rueda sin resbalar se debe tener que
1 1 2
KfJ = " V * + " C M W 2 2 punto A se habrá despegado de la superficie (fig.
I ángulo AO, mientras que su centro de masa se movió
Figura 1 1.43
E s decir, en un sistema de coordenadas arbitrario, la energía cinética total del cuerpo rígido es igual a la energía cinética del centro de masa que se mueve con velocidad V y masa M más la energía cinética de rotación alrededor del centro de masa. En la expre- sión (11.151 ) es el momento de inercia del cuerpo rígido con respecto al eje de giro que pasa por el cen- tro de masa.
S i ahora combinamos las ecs. (10.95)y(11.33), se ob- tiene para la torca ro de las fuerzas externas con res- pecto a O la expresión
7 0 = MR X A + / C M a (1 1 .I 52)
A% = A ' B (1 1 .I 53)
t t + A t
Figura 1 1.45
Ahora bien, en el intervalo At el cuerpo giró un ángulo AO (medido en radianes), por lo que el arco AB es
A% = H AO (1 1 .I 54)
siendo H la distancia del centro de masa al punto de contacto entre el cuerpo y la superficie.
Por otro lado, el centro de masa se movió trasla- cionalmente la distancia A'B con velocidad V, por lo que
A ' B = V A t ( 1 1 155)
Aquí R es el vector de posición del centro de masa con respecto a O y A la aceleración del centro de Sustituyendo (11 .I 54) y (1 1 .I 55) en la ec. (1 1 .I 53), se masa (también con respecto a O), mientras que Q! es el obtiene que vector de aceleración angular del cuerpo rígido con H A 8 = V A t respecto al centro de masa.
Un caso muy importante de movimiento combina- Despejando de aquí V se obtiene que do de traslación y de rotación es cuando un cuerpo rí- A8 gido rueda sin resbalar sobre una superficie. En este At V = H ~
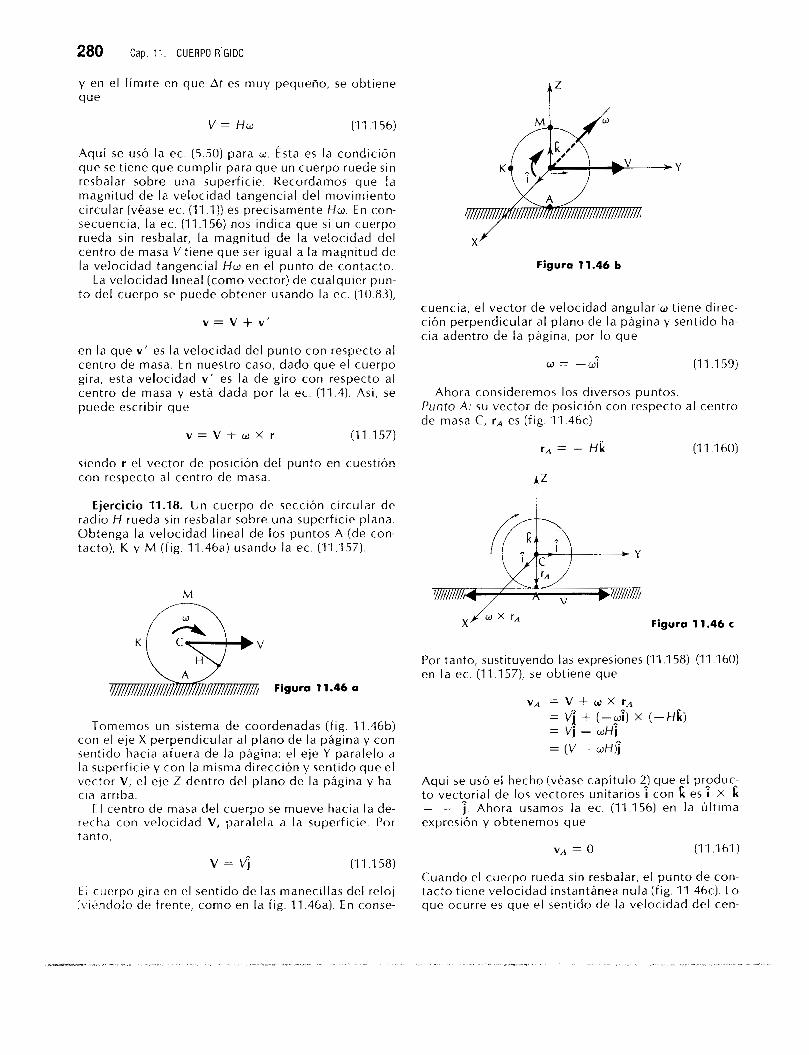
280 Cap. 11. CUERPO RíGIDO
y en el límite en que At es muy pequeño, se obtiene que
V = Hw (1 1 .I 56)
Aquí se usó la ec. (5.50) para w. ÉSta es la condici6n que se tiene que cumplir para que un cuerpo ruede sin resbalar sobre una superficie. Recordamos que !a magnitud de la velocidad tangencial del movimiento circular (véase ec. (11.1)) es precisamente Hw. En con- secuencia, la ec. (11.156) nos indica que s i un cuerpo rueda sin resbalar, la magnitud de la velocidad del centro de masa V tiene que ser igual a la magnitud de la velocidad tangencial Ho en el punto de contacto.
La velocidad l ineal (como vector) de cualquier pun- to del cuerpo se puede obtener usando la ec. (10.83),
v = V + v '
en la que v ' es la velocidad del punto con respecto al centro de masa. En nuestro caso, dado que el cuerpo gira, esta velocidad v ' es la de giro con respecto al centro de masa y está dada por la ec. (11.4). Así, se puede escribir que
v = V + w X r (1 1 .I 57)
siendo r el vector de posición del punto en cuestión con respecto al centro de masa.
Ejercicio 11.18. Un cuerpo de sección circular de radio H rueda sin resbalar sobre una superficie plana. Obtenga la velocidad lineal de los puntos A (de con- tacto), K y M (fig. 11.46a) usando la ec. (11.157).
K (?$)"" Figura 11.46 a
Tomemos un sistema de coordenadas (fig. 11.46b) con el eje X perpendicular al plano de la página y con sentido hacia afuera de la página; el eje Y paralelo a la superficie y con la misma dirección y sentido que el vector V; e l eje Z dentro del plano de la página y ha- cia arriba.
E l centro de masa del cuerpo se mueve hacia la de- recha con velocidad V, paralela a la superficie. Por tanto.
v = v; (1 1 .I 58)
t l cuerpo gira en el sentido de las manecillas del reloj (vl6ndolo de frente, como en la fig. 11.46a). En conse-
t'
Figura 11.46 b
cuencia, el vector de velocidad angular w tiene direc- ción perpendicular al plano de la página y sentido ha- cia adentro de la página, por lo que
,. w = " W I (1 1 .I 59)
Ahora consideremos los diversos puntos. Punto A: su vector de posición con respecto al centro de masa C, rA es ( f i g . 11 .46~)
rA = - HC (1 1 .I 60)
t'
Figura 11.46 c
Por tanto, sustituyendo las expresiones (11 .I 58) <11.160) en la ec. (11.157), se obtiene que
Aquí se usó el hecho (véase capítulo 2) que el prcduc- t o vect_oriaI de los vectores unitarios i con C es i X C = - j . Ahora usamos la ec. (11.156) en la última expresión y obtenemos que
Cuando el cuerpo rueda sin resbalar, el punto de con- tacto tiene velocidad instantánea nula (fig. 11.46~). Lo que ocurre es que el sentido de la velocidad del cen-
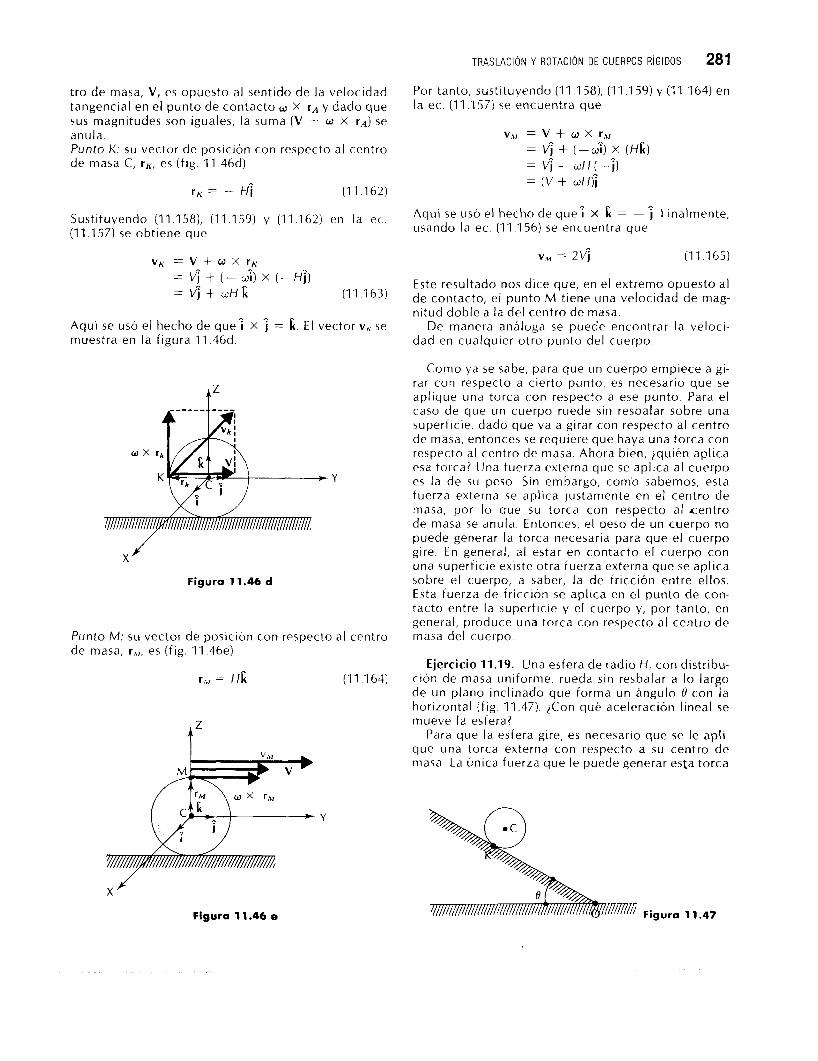
TRASLACIóN Y ROTACIóN DE CUERPOS RíGIDOS 281
tro de masa, V, es opuesto al sentido de la velocidad tangencia1 en el punto de contacto w X r A y dado que sus magnitudes son iguales, la suma (V + w X ra) se anula. Punto K: su vector de posición con respecto al centro de masa C, rK, es (fig. 11.46d)
a
rK = - Hj (1.1 .I 62)
Sustituyendo (11.158), (11.159) y (11.162) en la ec. (11.157) se obtiene que
Aquí se usó el hecho de que i X j = I;. E l vector v h se muestra en la figura 11.46d.
"
-7
x J
Figura 11.46 d
Punto M: su vector de posición con respecto al centro de masa, rM, es (fig. 11.46e)
r,,, = HI; (1 1 .I 64)
tZ " M b
'Y
Por tanto, sustitu\/endo (1 1 .I 58), (1 1 .I 59) y (1 1 .I 64) en la ec. (11 .I 57) se encuentra que
VM = v + w x r , = vi + (-ai) x (HI;) = v; - aH(- i ) = ( V + wH) j
Aquí se usó el hecho de que? X k = - j. Finalmente, usando la ec (11 l56) se encuentra que
v,w = 2 v j (1 1 .I 65)
Este resultado nos dice que, en el extremo opuesto al de contacto, el punto M tiene una velocidad de mag- nitud doble a la del centro de masa.
De manera análoga se puede encontrar la veloci- dad en cualquier otro punto del cuerpo.
Como ya se sabe, para que un cuerpo empiece a gi- rar con respecto a cierto punto, es necesario que se aplique una torca con respecto a ese punto. Para el caso de que un cuerpo ruede sin resbalar sobre una superficie, dado que va a girar con respecto al centro de masa, entonces se requiere que haya una torca con respecto al centro de masa. Ahora bien, iquién aplica esa torca? Una fuerza externa que se aplica al cuerpo es la de su peso. Sin embargo, com'o sabemos, esta fuerza externa se aplica justamente en el centro de masa, por lo que su torca con respecto al centro de masa se anula. Entonces, el peso de un cuerpo no puede generar la torca necesaria para que el cuerpo gire. En general, al estar en contacto el cuerpo con una superficie existe otra fuerza externa que se aplica sobre el cuerpo, a saber, la de fricción entre ellos. Esta fuerza de fricción se aplica en el punto de con- tacto entre la superficie y el cuerpo y, por tanto, en general, produce una torca con respecto al centro de masa del cuerpo.
Ejercicio 11.19. Una esfera de radio H, con distribu- ción de masa uniforme, rueda sin resbalar a lo largo de un plano inclinado que forma un ángulo 0 con la horizontal (fig. 11.47). icon qué aceleración l ineal se mueve la esfera?
Para que l a esfera gire, es necesario que se le apli- que una torca externa con respecto a su centro de masa. La única fuerza que le puede generar esta torca
Figura 11.46 e
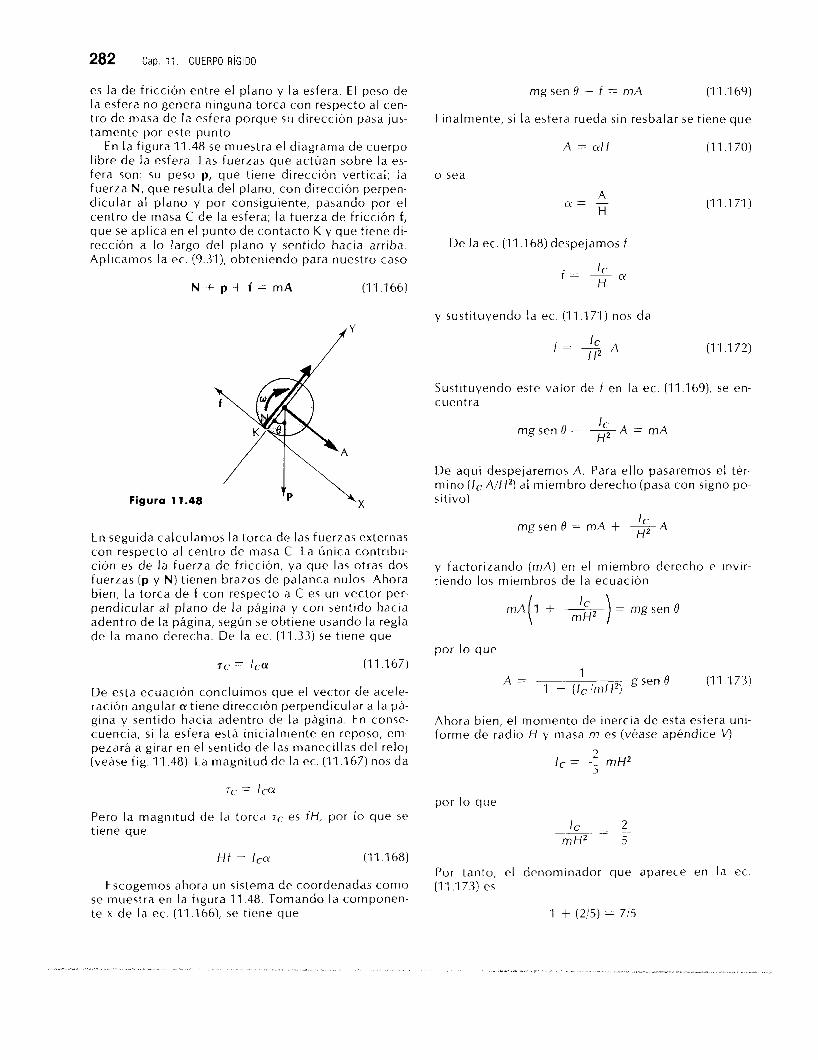
282 Cap. I i. CUERPO RiGlDO
es la de fricción entre el plano y la esfera. E l peso de la esfera no genera ninguna torca con respecto al cen- tro de masa de la esfera porque su dirección pasa jus- tamente por este punto.
En la figura 11.48 se muestra el diagrama de cuerpo libre de la esfera. Las fuerzas que actilan sobre la es- fera son: su peso p, que tiene dirección vertical; la fuerza N, que resulta del plano, con dirección perpen- dicular al plano y por consiguiente, pasando por el centro de masa C de la esfera; la fuerza de fricción f , que se aplica en el punto de contacto K y que tiene di- rección a lo largo del plano y sentido hacia arriba. Aplicamos la ec. (9.31), obteniendo para nuestro caso
N + p + f = m A (1 1 .I 66)
/ y
Figura 1 1.48
En seguida calculamos la torca de las fuerzas externas con respecto al centro de masa C. La única contribu- ción es de la fuerza de fricción, ya que las otras dos fuerzas (p y N) tienen brazos de palanca nulos. Ahora bien, la torca de f con respecto a C es un vector per- pendicular al plano de la página y con sentido hacia adentro de la página, según se obtiene usando la regla de la mano derecha. De la ec (11.33) se tiene que
7c = Ica (1 1 .I 67)
De esta ecuación concluimos que el vector de acele- ración angular a tiene dirección perpendicular a la pá- gina y sentido hacia adentro de la página. En conse- cuencia, si la esfera está inicialmente en reposo, em- pezará a girar en e l sentido de las manecillas del reloj (veáse fig. 11.48). La magnitud de la ec. (11.167) nos da
TC = Ica
Pero la magnitud de la torca rc es fH, por lo que se tiene que
H i = Ica (1 1 .I 68)
Escogemos ahora un sistema de coordenadas como se muestra en la figura 11.48. Tomando la componen- te x de la ec. (11.166), se tiene que
mgsen 0 - f = mA (1 1 .I 69)
Finalmente, s i la esfera rueda sin resbalar se tiene que
A = aH (1 1 .I 70)
o sea A H
cy= - (I1 .I 71)
De la ec. (1 1 .I 68) despejamos f
y sustituyendo la ec. (11.171) nos da
(1 1 . I 72)
Sustituyendo este valor de i en la ec. (11.169), se en- cuentra
mg sen H - - A = mA IC
De aquí despejaremos A. Para ello pasaremos el tér- mino ( IcAIH2) al miembro derecho (pasa con signo po- sitivo)
mg sen O = mA + __ HZ lC A
y factorizando (mA) en el miembro derecho e invir- tiendo los miembros de la ecuación
mA(1 + +) = mg sen
por lo que
1 1 + (Ic.imH2) A = g sen 0 (11 173)
Ahora bien, el momento de inercia de esta esfera uni- forme de radio H y masa m es (véase apéndice V)
2 I C = ,mH2 3
por lo que
Por tanto, el denominador que aparece en la ec. (1 1 .I 73) es
1 + (215) = 715
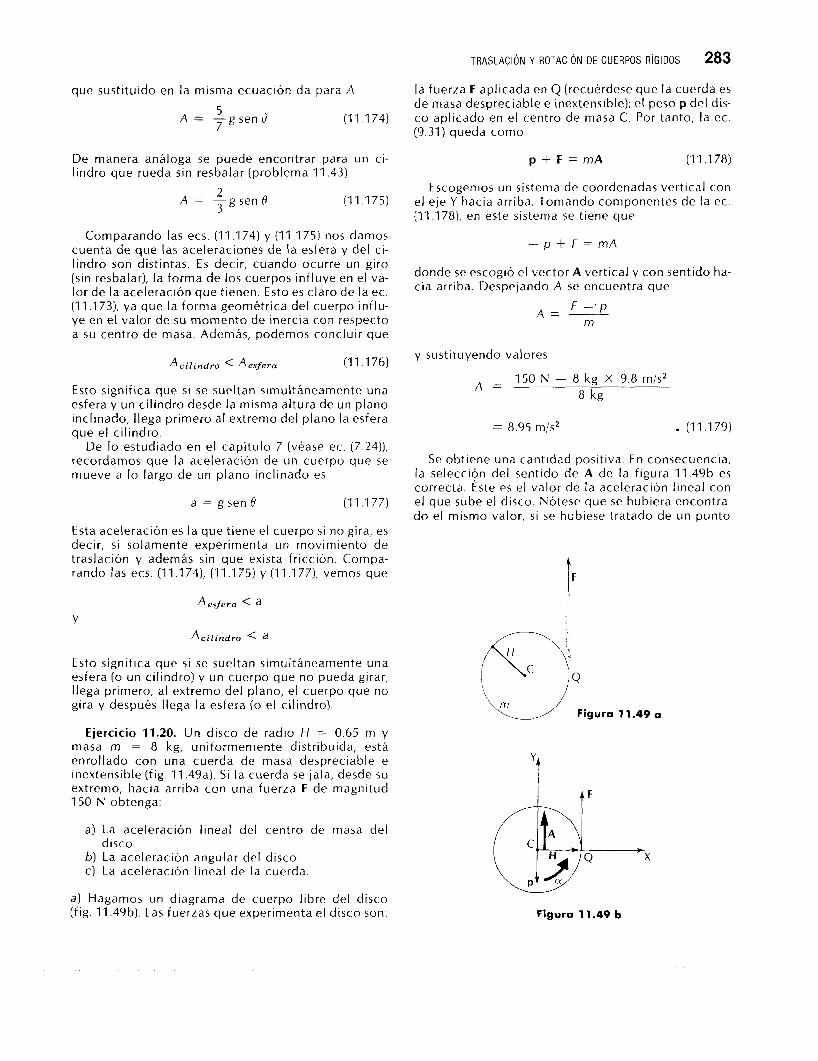
que sustituido en la misma ecuación da para A 5 A = " g s e n 3 7 (1 1 .I 74)
De manera análoga se puede encontrar para un ci- lindro que rueda sin resbalar (problema 11.43)
1 L A = ~ g s e n 8 (1 1 .I 75)
Comparando las ecs. (11 .I 74) y (11 .I 75) nos damos cuenta de que las aceleraciones de la esfera y del ci- l indro son distintas. E s decir, cuando ocurre un giro (sin resbalar), la forma de los cuerpos influye en el va- lor de la aceleración que tienen. Esto es claro de la ec. (11.173), ya que la forma geométrica del cuerpo influ- ye en el valor de su momento de inercia con respecto a su centro de masa. Además, podemos concluir que
A c i l i n d r o Aesfera (1 1 .I 76)
Esto significa que s i se sueltan simultáneamente una esfera y un cilindro desde la misma altura de un plano inclinado, llega primero al extremo del plano la esfera que el cilindro.
De lo estudiado en el capítulo 7 (véase ec. (7.24)), recordamos que la aceleración de un cuerpo que se mueve a lo largo de un plano inclinado es
a = gsen 19 (1 1 .I 77)
Esta aceleración es la que t iene el cuerpo s i no gira, es decir, s i solamente experimenta un movimiento de traslación y además sin que exista fricción. Compa- rando las ecs. (1 1 .I 74), (1 1 .I 75) y (1 1 .I 77), vemos que
Aesfera < a Y
A c i l i n d r o < a
Esto significa que s i se sueltan simultáneamente una esfera (o un cil indro) y un cuerpo que no pueda girar, llega primero, al extremo del plano, el cuerpo que no gira y después llega la esfera (o el cilindro).
Ejercicio 11.20. Un disco de radio H = 0.65 m y masa m = 8 kg, uniformemente distribuida, está enrollado con una cuerda de masa despreciable e inextensible (fig. 11.49a). Si la cuerda se jala, desde su extremo, hacia arriba con una fuerza F de magnitud 150 N obtenga:
a) La aceleración lineal del centro de masa del
b) La aceleración angular del disco. c) La aceleración lineal de la cuerda.
disco.
a) Hagamos un diagrama de cuerpo libre del disco (fig. 11.49b). Las fuerzas que experimenta el disco son:
TRASLACIóN Y ROTACIóN DE CUERPOS RíGIDOS 283
la fuerza F aplicada en Q (recuérdese que la cuerda es de masa despreciable e inextensible); el peso p del dis- co aplicado en el centro de masa C. Por tanto, la ec. (9.31) queda como
p + F = m A (1 1 .I 78)
Escogemos un sistema de coordenadas vertical con el eje Y hacia arriba. Tomando componentes de la ec. (11.178), en este sistema se tiene que
- - p + F = r n A
donde se escogió el vector A vertical y con sentido ha- cia arriba. Despejando A se encuentra que
A = - F - - ' p m
y sustituyendo valores
A = 150 N - 8 kg X 9.8 mis2 8 kg
= 8.95 mis2 . (11 .I 79)
Se obtiene una cantidad positiva. En consecuencia, la seleccion del sentido de A de la figura 11.49b es correcta. Este es el valor de la aceleración lineal con el que sube el disco. Nótese que se hubiera encontra- do el mismo valor, si se hubiese tratado de un punto
11.49 a
't 1 4 F
Figura 11.49 b
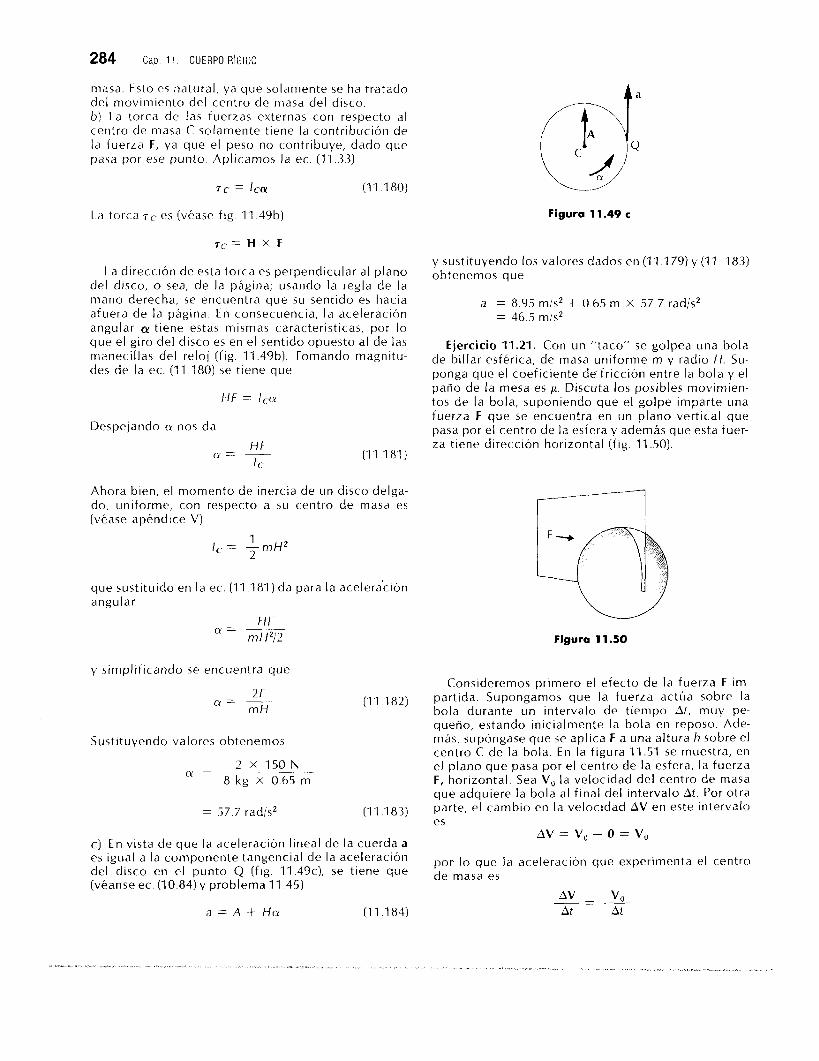
284 Cap. 11 CUERPO R ~ G I O O
masa. Esto es natural, ya que solamente se ha tratado del movimiento del centro de masa del disco. 5) La torca de las fuerzas externas con respecto a l centro de masa C solamente tiene la contribución de la fuerza F, ya que el peso no contribuye, dado que pasa por ese punto. Aplicamos la ec. (11 33)
7r /col (1 1 .I 80)
La torca 7 c es (véase fig. 11.49b)
T C = H X F
La dirección de esta torca es perpendicular al plano del disco, o sea, de la página; usando la regla de la mano derecha, se encuentra que su sentido es hacia afuera de la página En consecuencia, la aceleracihn angular a tiene estas mismas características, por lo que el giro del disco es en el sentido opuesto al de las manecillas del reloj (fig. 11.49bj. Tomando magnitu- des de la ec. (11.180) se tiene que
H F = Ira
Despejando o( nos da
(1 1 .I 81 )
Ahora bien, el momento de inercia de un disco delga- do, uniforme, con respecto a su centro de masa es (vease apéndice V)
1 IC = "mH2 2
que sustituido en la ec. (11 .I81 j da para la acelera'ción angular
HF rnH212
a = ~
y simplif icando se encuentra que
(11.182)
Sustituyendo valores obtenemos
2 X 150 N 8 kg X 0.65 m CY=
= 57.7 rad/s2 (1 1 .I 83)
c) En vista de que la aceleración lineal de la cuerda a es igual a la componente tangencia1 de la aceleración del disco en el punto Q (flg. 11.49c), se tiene que (véanse ec. (10.84) y problema 11.45)
a = A + H a (11 184)
Figura 11.49 c
y sustituyendo los valores dados en (11.179) y (11. 183) obtenemos que
a = 8.95 mis2 + 0.65 m x 57.7 rad/s2 = 46.5 mis2
Ejercicio 11.21. Con un "taco" se golpea una bola de billar esférica, de masa uniforme m y radio H. Su- ponga que el coeficiente de,fricción entre la bola y el paño de la mesa es ,x. Discuta los posibles movimien- tos de la bola, suponiendo que el golpe imparte una fuerza F que se encuentra en un plano vertical que pasa por el centro de l a esfera y además que esta fuer- za tiene dirección horizontal (fig. 11.50).
r"l
Figura 1 1.50
Consideremos primero el efecto de la fuerza F im- partida. Supongamos que la fuerza actúa sobre la bola durante un intervalo de t iempo At, muy pe- queño, estando inicialmente la bola en reposo. Ade- más, supóngase que se aplica F a una altura h sobre el centro C de la bola. En la figura 11.51 se muestra, en el plano que pasa por el centro de la esfera, la fuerza F, horizontal. Sea V, la velocidad del centro de masa que adquiere la bola al f inal del intervalo Af. Por otra parte, e l cambio en la velocidad AV en este intervalo es
AV = Vu - O = Vu
por lo que la aceleración que experimenta el centro de masa es
AV - V" ~- __
At At

T R A S L A C I ~ N Y R O T A C I ~ N DE CUERPOS RIGIDOS 285
Figura 11 .S 1
De la ec. (9.31) se tiene entonces que
F = m - v, At
Sustituyendo (F At) dado por la ec. (11 185) en la ec. (1 1 .I 86) obtenemos
mV,h = Iw, (1 1 .I 87)
En el apéndice V vemos que el momento de inercia de una esfera uniforme con respecto a un eje que pasa por su centro de masa es
2 I = - -Hz 5
que sustituida en la ec. (11.187) nos da
2 5 mV,h = - m H 2 w ,
y de aquí y multiplicando ambos miembros por (5/2 m H ) se en-
Hw, = V, (* $) (1 1 .I 88)
cuentra que FAt = mV,
y tomando la magnitud de esta ecuación nos da
FAt = mV, (1 1 .I 85)
Por otro lado, la fuerza F genera una torca 7 con res- pecto al centro de masa C que tiene dirección perpen- dicular al plano de la página y sentido hacia adentro de la página. De la ec. (11.33) concluimos que se gene- ra una aceleración angular que también tiene estas características. S i la bola estaba inicialmente en repo- so, entonces empezará a girar con una velocidad an- gular con las mismas características, es decir, el giro de la bola será en el sentido de las manecillas del re- loj, como se muestra en la figura 11 .SI. Sea u, la velo- cidad angular que adquiere la bola al final del interva- lo At. E l cambio de la velocidad angular Au es
Au = U" - O 1 W"
por lo que su aceleración angular es
Aplicando la ec. (11 33) se tiene entonces que
En esta ecuación I es el momento de inercia de la es- fera con respecto al eje de rotación, que pasa por su centro de masa. De aquí se tiene que
TAt = I w ~
Tomando la magnitud de esta ecuación y dándonos cuenta de que 7 = Fh se tiene
(FAt)h = Iw, (1 1 .I 86)
Esta ecuación nos da la relación entre las magnitudes de la velocidad del centro de masa V, y de la veloci- dad angular wo que adquiere la bola debido al impulso que le da el "taco". Supondremos de ahora en adelan- te que el instante en que cesa el contacto con el "taco", es decir, en el instante en que la bola adquiere los va- lores de V, y wo acabados de obtener, será el instante inicial.
i ) h = 2H/5. En este caso, la cantidad encerrada en el paréntesis de l a ec. (11.188) es
Consideraremos varios casos.
5 h - - " = I 2 H
por lo que
Hw, = V, (1 1 .I 89)
Pero ésta es precisamente la condición para que la es- fera ruede sin resbalar (véase ec. ( l l . lS6) ) . Es decir, s i se aplica el golpe del "taco" a una altura (2H/5) sobre el centro de la esfera, desde un principio la bola gira sin resbalar. De lo estudiado arriba (véase ejercicio 11.18. ec. (11.161)), sabemos que en estas circunstan- cias, la velocidad lineal de la bola en el punto de con- tacto con la mesa es nula. Esto es, el punto de contac- to está en reposo instantáneo, o sea, no se mueve. Por otro lado, sabemos que si no hay movimiento entre dos superficies, no se genera una fuerza de fricción entre ellas. En consecuencia, en nuestro cdso no se ge- nera ninguna fuerza de fricción entre la bola y la mesa y, en consecuencia, no hay nada que haga cam- biar la velocidad lineal de su centro de masa. Por tan- to, la bola continúa rodando sin resbalar indefinida- mente, manteniendo todo el t iempo la velocidad de
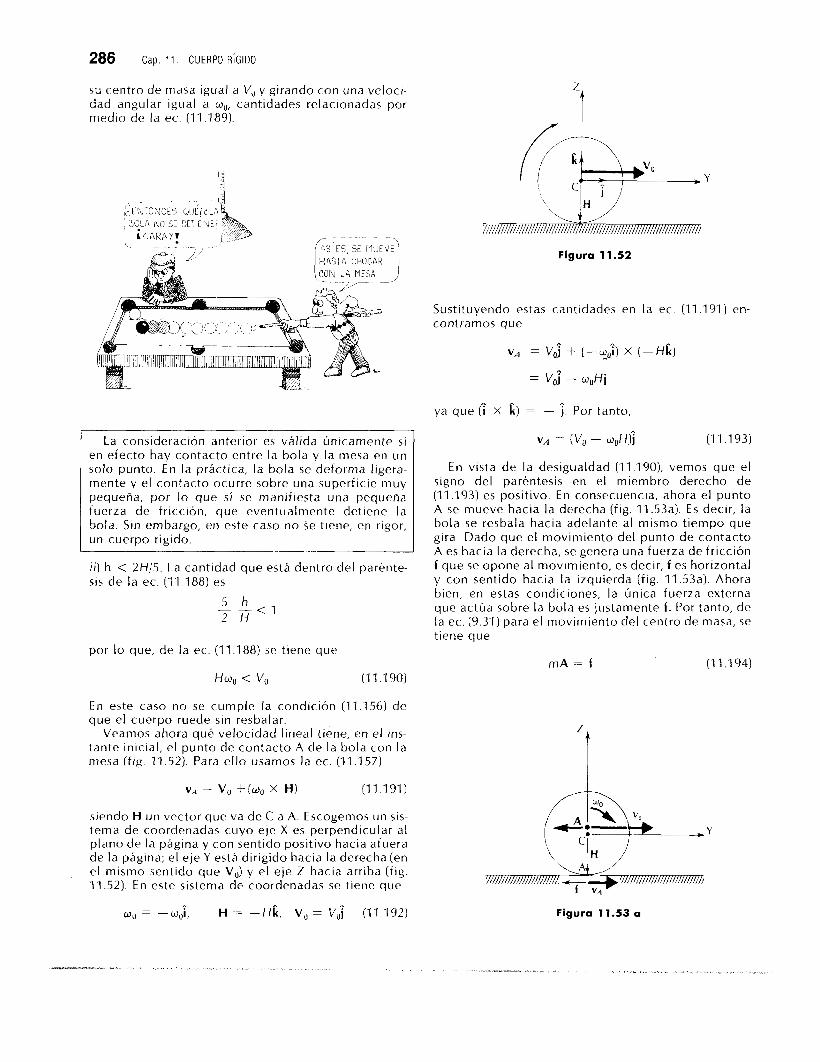
286 Cap. 11. CUERPO RíGIDO
su centro de masa igual a V,, y girando con una velocl- dad angular igual a o", cantidades relacionadas por medio de la ec. (11.189).
La consideración anterior es válida únicamente s i en efecto hay contacto entre la bola y la mesa en un solo punto. En la práctica, la bola se deforma ligera- mente y el contacto ocurre sobre una superficie muy pequeña, por lo que s i se manifiesta una pequeña fuerza de fricción, que eventualmente detiene la bola. Sin embargo, en este caso no se tiene, en rigor, un cuerpo rígido.
i i ) h < 2H/5. La cantidad que está dentro del parénte- sis de la ec. (11.188) es
5 h --<I 2 H
zt
Figura 11.52
Sustituyendo estas cantidades en la ec. (11.191) contramos que
V A = Vo? + (-E,;) x (-Hlk)
= VoT - w,Hj
en-
ya que fi X &) = - 1. Por tanto, n
V A = (V, - w,H)j (1 1 .I 93)
En vista de la desigualdad (11.190), vemos que el signo del paréntesis en el miembro derecho de (11.193) es positivo. En consecuencia, ahora el punto A se mueve hacia la derecha (fig. 11.53a). Es decir, la bola se resbala hacia adelante al mismo tiempo que gira. Dado que el movimiento del punto de contacto A es hacia la derecha, se genera una fuerza de fricción f que se opone al movimiento, es decir, f es horizontal y con sentido hacia la izquierda (fig. 11.53a). Ahora bien, en estas condiciones, la única fuerza externa que actúa sobre la bola es justamente f. Por tanto, de la ec. (9.31) para el movimiento del centro de masa, se tiene que
por lo que, de la ec. (11,188) se tiene que rnA = f (1 1 .I 94)
Ha , < V, (1 1 .I 90)
En este caso no se cumple la condición (11.156) de que el cuerpo ruede sin resbalar.
Veamos ahora qué velocidad lineal tiene, en el ins- tante inicial, el punto de contacto A de l a bola con la mesa (fig 11.52). Para el lo usamos la ec. (11.157)
VA = Vu +(@o X H) (11.191)
siendo H un vector que va de C a A. Escogemos un s is- tema de coordenadas cuyo eje X es perpendicular al plano de la página y con sentido positivo hacia afuera de la página; el eje Y está dirigido hacia la derecha (en el mismo sentido que V,) y el eje Z hacia arriba (fig. 11.52). En este sistema de coordenadas se tiene que t-
VA
wu = - wi, H = - Hlk, V, = Vu; (11.192) Figura 1 1.53 a

TRASLACIóN Y ROTACIóN DE CUERPOS RiGlDOS 287 En consecuencia, sobre el centro de masa actúa, en
el instante inicial, una aceleración A horizontal y con sentido hacia la izquierda. Como esta aceleración A tiene la misma dirección, pero sentido opuesto a V,, su efecto es disminuir la magnitud de la velocidad del centro de masa.
Por otro lado, la fuerza de fricción genera una torca con respecto al centro de masa C, 7f, con dirección perpendicular al plano de la página y con sentido ha- cia adentro de la página. De la ec. (11.33) se concluye que, en el instante inicial, se genera una aceleración angular a que también tiene estas características. Dado que la velocidad angular inicial u, tiene tam- bién estas características, se tiene la situación de que la aceleración angular y la velocidad angular tienen la misma dirección y el mismo sentido. En consecuen- cia, al transcurrir el tiempo, la magnitud de la veloci- dad angular ¡aumenta!
En resumen, podemos decir que s i h < (2H/5), en- tonces la velocidad lineal V, es mayor que la veloci- dad tangencial de la bola en el punto de contacto (ec. (11.190)); al transcurrir el tiempo, la velocidad lineal del centro de masa disminuye su magnitud mientras que la velocidad angular la aumenta. Llegará enton- ces un momento en el cual las velocidades del centro de masa y la tangencial en el punto de contacto sean iguales. En este momento la bola empezará a rodar sin resbalar. Calculemos cuánto tiempo tarda en cumplirse esta condición. Para ello necesitaremos co- nocer los valores de las velocidades lineal del centro de masa y angular de la bola en cada instante. Vea- mos primero la velocidad del centro de masa. Toman- do la magnitud de la ec. (11.194) nos da
Aquí se usó el hecho de que la magnitud de la fuerza de fricción f es igual al producto del coeficiente de fricción + por la magnitud de la fuerza que aprieta a las superficies, que en este caso es el peso de la bola ( = mg). La aceleración A es constante, por lo que el movimiento que realiza el centro de masa es unifor- memente acelerado. En vista de que los vectores A y V, tienen sentidos opuestos, se puede escribir para la velocidad del centro de masa en el instante t, V(t), lo siguiente (véase sección 4.3)
V(t) Vu - A t = V, - pgr (1 1 .I 96)
Por otro lado, la fuerza de fricción genera una tor- ca. Tf, con respecto al centro de masa C, dada por (véase ec. (11.33))
7f = la (1 1 .I 97)
Tomando la magnitud de esta ecuación obtenemos que
- 5 Pg 2 H
(1 1 .I 98)
Aquí usamos el hecho de que el momento de inercia de la esfera con respecto a un eje pasa por su centro es igual a (2mH2/5) (véase apéndice V). La velocidad angular de la bola en el instante t, dt), la obtenemos de (véase la ec. (5.52))
Sustituyendo (11.198) y usando la ec. (4.28) con n = 1 se encuentra que
w(t) = - - 5 V,h 5 tLg + -~ (1 I .I 99) 2 H 2 2 H
Aquí se usó el valor de o. dado por la ec. (11.188).
que la bola ruede sin resbalar Sea t , el instante en que se cumple la condición de
Sustituyendo las expresiones (11.196) y (11.199) en la ec. (11.200). obtenemos que
i s t a es una ecuación con una incógnita, a saber, t l . Se resuelve como sigue. Pasando el término que contie- ne t , del miembro izquierdo al derecho (pasa con sig- no positivo) y pasando el término que no contiene rl del miembro derecho al izquierdo (pasa con signo ne- gativo) se tiene
Factorizando V, en el miembro izquierdo y sumando los términos del derecho, se encuentra
( z ) 2 7 v, 1 - - - = " g t l
Finalmente multiplicamos ambos miembros por (2/7 pg), obteniendo
(1 1.201)
En este instante t , la bola empieza a rodar sin resba- lar. Ahora bien, como se discutió en el inciso i], arriba, una vez que la bola está rodando sin resbalar no se ge- nera ninguna fuerza de fricción y, por tanto, no hay agente que modifique la velocidad V(t,) que tiene el centro de masa. En consecuencia, la bola continuará rodando sin resbalar indefinidamente. E l valor de la
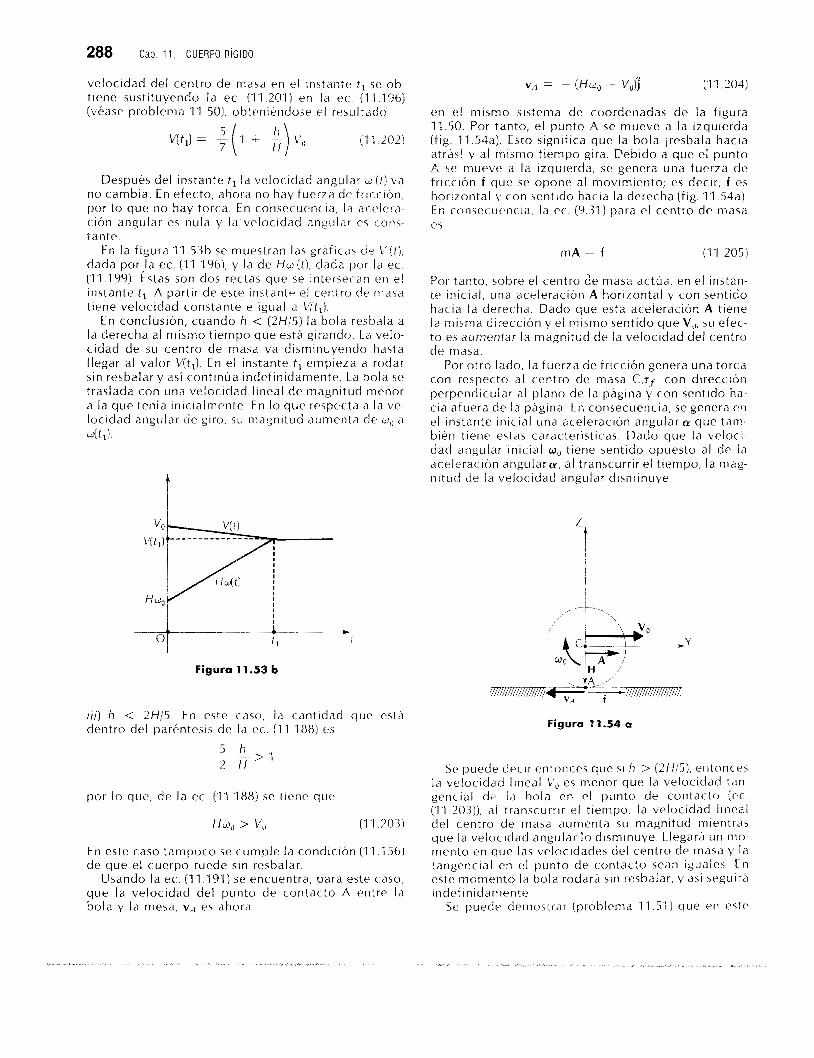
288 Cap. 1 1 . CUERPO R~GIDO
velocidad del centro de masa en el instante t l se ob- tiene sustituyendo la ec. (11.201) en la ec (11.1S)h) (véase problema 11 SO), obtcnikndose el resultado
(1 1 .Li12)
Después del instante t , la velociddd angular w (t) ya no cambia. En efecto, ahora no hay fuer7a de fricción, por lo que no hay torca En consecuenc ¡a, la dceler+ ción angular es nula y la.velocidad angular CIS con i - lante
En la figura 11.53b se muestran las grátlcds tit: V ( t ) , dada por la ec. (11.1961, y la de /Hu ( t ) , dada por la ec. (1 1 .I 99). Éstas son dos rectas que se inter.;ecarl cn e l instante t l . A partir de este instant? el cer:tro d c lnasd tiene velocidad constante e igual a L T t J
En conclusión, cuando h < (2H/5) la bola resbala a la derecha al mismo tiempo que está girando. [La velo- cidad de su centro de masa va disminuyendo \IdSta llegar a l valor V(t,). En el instante t, empieza a rodar sin resbalar y así continúa indefinidamente. La bola se traslada con Lirla velocidad lineal de magnitud menor a la que tenía inicialmente En lo que respec-ta J la ve- locrdad angular de giro, su magnitud aumenta dc 'L,, a 4 t l ) .
"" O
Figura
i/i) h < 2H15 En este dentro del paréntesis de
por lo que, de la ec (11
VA = - (Ha , - vofi (11.2041
en e l mismo sistema d p coordenadas de la figura 11.50. Por tanto, el punto A se mueve a la izquierda (fig. 11.54aj. Esto significa que la bola iresbala hacia atrás! y a l mismo tiempo gira. Pebido a que e¡ punto i: se rnueve d la izquierda, se genera una fuerza de fricción f que se opone al movimiento; es decir, f es horizontal y con sentido hacia la derecha (fig. 11 54a). E n consecuencia, la ec. (9.31) para el centro de masd es
mA = f (11 20.5)
Por tanto, sobre el centro de masa actúa, en el Instan- te i l l tcial, una aceleración A hori7ontal v con sentido hacia la derecha. Dado que esta aceleración A tiene la misma direccl6n y el mismo sentido que V,, su efec- t o es aumentar Id magnitud de la velocidad del centro de nldsa.
Por otro lado, la fuerza de fricción genera una torca con respecto al centro de masa C , T . ~ con direcci jn perpendicular al plano de la página y con sentido ha- cia afuera de la página. En consecuencia, se genera en e l instante inicial una aceleración angular (Y que tam- bién trene estas características. Dado que la ve1oc1- dad angular inicial a,, tiene sentido opuesto al de la dceieraclhn anguiara, dl transcurrir el tiempo, la mag- ni tud d e la velocidad angular dlsminuve
7
L f i
t l f
11.53 b
caso, Id cantidad que est6 I n ('C (11 188) es
->I h H
188) se tiene qc~e
En este caso tampoco se cumple la condición (11 156) de que el cuerpo ruede sin resbalar.
Usando l a ec (11.191) se encuentra, para este caio, que la velocidad del punto de contacto A entre Id bola y la mesa, VA es ahora
Figura 11.54 a
Se puede decrr entonces que SI h > (2fiJ'.-' J ~ J , entonces la velocidad lineal V, es menor que la vrloc-iddd tal l- gcncial de ¡ a bola en el punto de contacto ( e c (1.1 20.3)), a l transcurrir el tiempo, la velocidad Ilneai del centro de masa aumenta s u magnitud mientras que ia velocidad angular lo disminuye Llegará un mo- mento en que las velocidades del centro de masd y l a tangencia1 en el punto de contacto sean iguales t n este momento lc3 bola rodar5 sin resbalar, y así seguir:) indefinidamente
Se puede deinostrdr (problema 11 51 j que en este
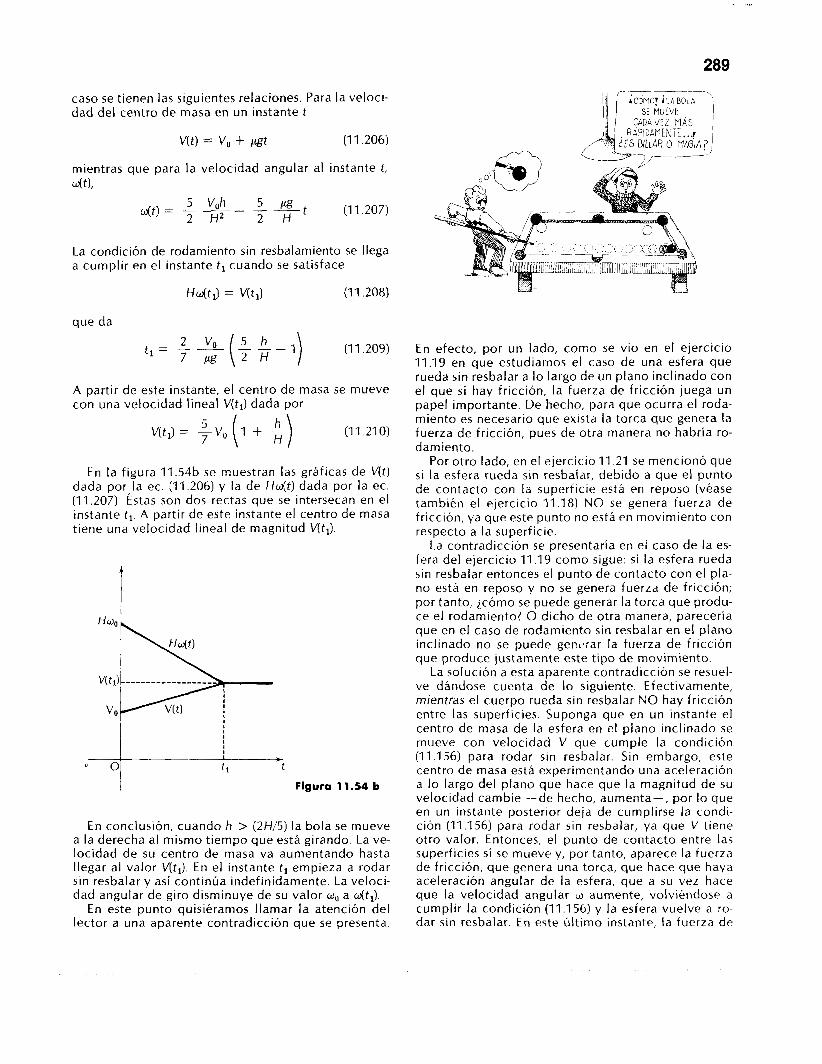
caso se tienen las siguientes relaciones. Para la veloci- dad del centro de masa en un instante t
V( t ) = v, + pgt (1 1.206)
mientras que para la velocidad angular al instante t, 4 1 ,
La condición de rodamiento sin resbalamiento se llega a cumplir en el instante t l cuando se satisface
que da
t - ?-&(A 7 pg 2 h-I) H (11.209)
A partir de este instante, el centro de masa se mueve con una velocidad l ineal V(t,) dada por
En la figura 11.54b se muestran las gráficas de V(t ) dada por la ec. (11.206) y la de Hwft) dada por la ec. (11.207). Éstas son dos rectas que se intersecan en el instante t,. A partir de este instante el centro de masa tiene una velocidad lineal de magnitud V(tl).
V(t,)C """""""""
vo li;) - I I I I :t1 I
t Figura 11.54 b
En conclusión, cuando h > (2H/5) la bola se mueve a la derecha al mismo tiempo que está girando. La ve- locidad de su centro de masa va aumentando hasta llegar al valor V(tl). En el instante t , empieza a rodar sin resbalar y así continúa indefinidamente. La veloci- dad angular de giro disminuye de su valor wo a w(tl).
En este punto quisiéramos llamar la atención del lector a una aparente contradicción que se presenta.
En efecto, por un lado, como se vio en el ejercicio 11.19 en que estudiamos el caso de una esfera que rueda sin resbalar a lo largo de un plano inclinado con el que sí hay fricción, la fuerza de fricción juega un papel importante. De hecho, para que ocurra el roda- miento es necesario que exista la torca que genera la fuerza de fricción, pues de otra manera no habría ro- damiento.
Por otro lado, en el ejercicio 11.21 se mencionó que s i la esfera rueda sln resbalar, debido a que el punto de contacto con la superficie está en reposo (véase también el ejercicio 11.18) NO se genera fuerza de fricción, ya que este punto no está en movimiento con respecto a la superficie.
La contradicción se presentaría en el caso de la es- fera del ejercicio 11.19 como sigue: s i la esfera rueda sin resbalar entonces el punto de contacto con el pla- no está en reposo y no se genera fuerza de fricción; por tanto, jcómo se puede generar la torca que produ- ce el rodamiento? O dicho de otra manera, parecería que en el caso de rodamiento sin resbalar en el plano inclinado no se puede ger?t'rar la fuerza de fricción que produce justamente este tipo de movimiento.
La solución a esta aparente contradicción se resuel- ve dándose cuenta de lo siguiente. Efectivamente, mientras el cuerpo rueda sin resbalar NO hay fricción entre las superficies. Suponga que en un instante el centro de masa de la esfera en el plano inclinado se mueve con velocidad V que cumple la condición (11.156) para rodar sin resbalar. Sin embargo, este centro de masa está experimentando una aceleración a lo largo del plano que hace que la magnitud de su velocidad cambie -de hecho, aumenta-, por lo que en un instante posterior deja de cumplirse la condi- ción (11.156) para rodar sin resbalar, ya que V tiene otro valor. Entonces, el punto de contacto entre las superficies sí se mueve y, por tanto, aparece la fuerza de fricción, que genera una torca, que hace que haya aceleración angular de la esfera, que a su vez hace que la velocidad angular w aumente, volviéndose a cumplir la condición (11.156) y la esfera vuelve a ro- dar sin resbalar. En este último instante, la fuerza de
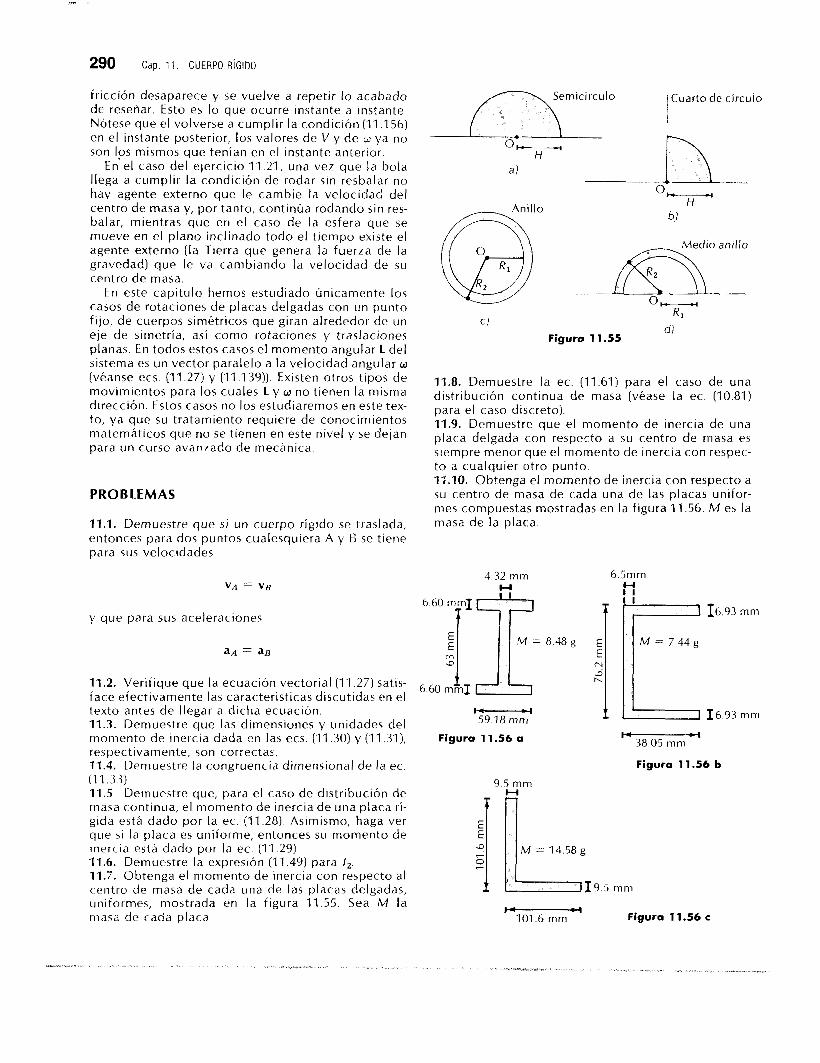
?m .
290 Cap. 11. CUERPO R ~ G I D O
fricción desaparece y se vuelve a repetir lo acabado de reseñar. Esto es lo que ocurre instante a instante. Nótese que el volverhe a cumplir la condición (11.156) en el instante posterior, los valores de V y de w ya no son Ips mismos que tenían en el instante anterior.
En el caso del ejercicio 11.21, una vez que la bola llega a cumplir la condición de rodar sin resbalar no hay agente externo que le cambie la velocidad del centro de masa y, por tanto, continúa rodando sin res- balar, mientras que en el caso de la esfera que se mueve en el plano inclinado todo el tiempo existe el agente externo (la Tierra que genera la fuerza de la gravedad) que le va cambiando la velocidad de su centro de masa.
En este capitulo hemos estudiado únicamente los casos de rotaciones de placas delgadas con un punto fijo, de cuerpos simétricos que giran alrededor de un eje de simetría, así como rotaciones y traslaciones planas. En todos estos casos el momento angular 1 del sistema es un vector paralelo a l a velocidad angular w (véanse ecs. (11.27) y (11.139)). Existen otros tipos de movimientos para los cuales 1 y w no tienen la misma dirección. Estos casos no los estudiaremos en este tex- to, ya que su tratamiento requiere de conocimientos matemáticos que no se tienen en este nivel y se dejan para un curso avan7ado de mecánica.
PROBLEMAS
11.1. Demuestre que s i un cuerpo rígido se traslada, entonces para dos puntos cualesquiera A y 6 se tiene para sus velocidades
V A Z Z vg
y que para sus aceleraciones
aA = a B
11.2. Verifique que la ecuación vectorial (11.27) satis- face efectivamente las características discutidas en el texto antes de llegar a dicha ecuación. 11.3. Demuestre que las dimensiones y unidades del momento de inercia dada en las ecs. (11.30) y (11.31), respectivamente, son correctas. 11.4. Demuestre la congruencia dimensional de la ec. (1 1.33). 11.5 Demuestre que, para el caso de distribución de masa continua, el momento de inercia de una placa ri- gida está dado por la ec. (11.28). Asimismo, haga ver que s i la placa es uniforme, entonces su momento de inercia está dado por la ec. (11.29). 11.6. Demuestre la expresión (11.49) para I,. 11.7. Obtenga el momento de inercia con respecto al centro de masa de cada una de las placas delgadas, uniformes, rnostrada en la figura 11.55. Sea M la masa de cada placa
-" .-. ,1_,_ "/_ ,,*_.. I . -
H ai
Cuarto de circulo
- H
d) Figura 1 1 .S5
11.8. Demuestre la ec. (11.61) para el caso de una distribución continua de masa (véase la ec. (10.81) para el caso discreto). 11.9. Demuestre que el momento de inercia de una placa delgada con respecto a su centro de masa es siempre menor que el momento de inercia con respec- to a cualquier otro punto. 71.10. Obtenga el momento de inercia con respecto a su centro de masa de cada una de las placas unifor- mes compuestas mostradas en la figura 11.56. M es la masa de la placa.
~=
4.32 mrn
- 59.18 mrn
Figura 1 1.56 a
8.48 g
6.5mm U I I
16.93
M = 7 4 4 g
I6 93 - 38 OS mm
Figura 11.56 b
9.5 rnrn
M = 14.58g
1 9 . 5 mm - 101.6 mm Figura 11.56 c
mrn
rnm
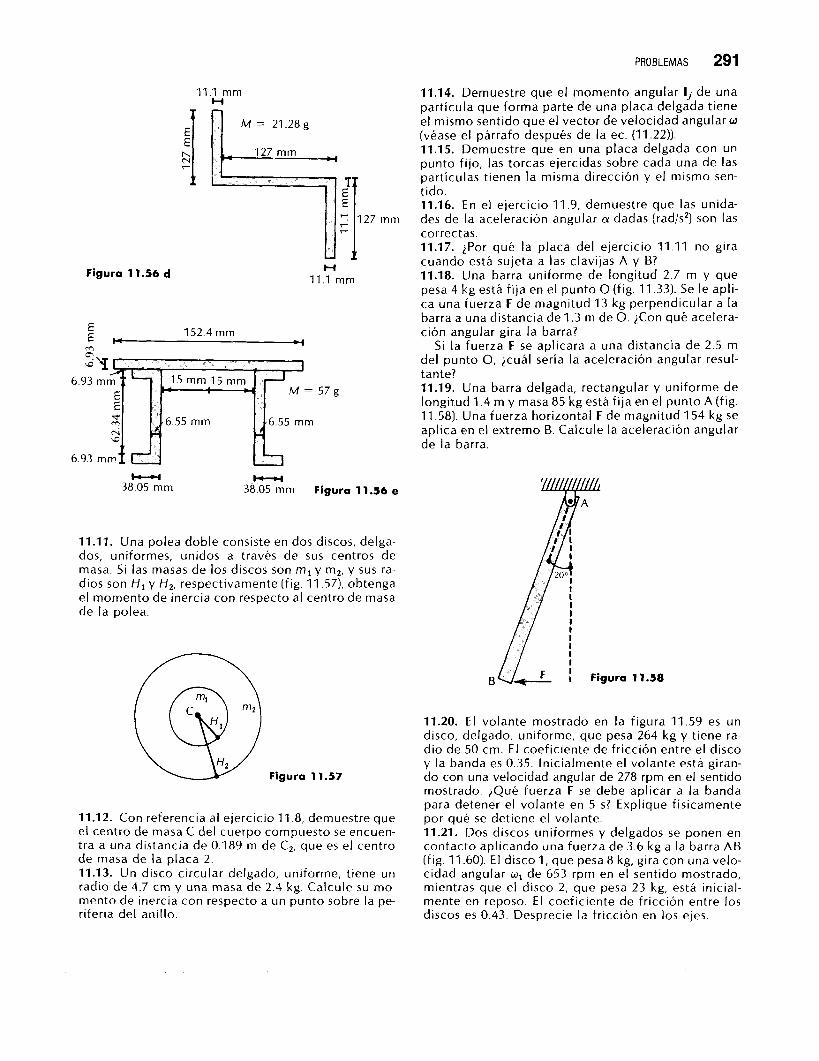
PROBLEMAS 291 11.1 rnrn
H
Figura 11.56 d H 11.1 rnrn
E E w 152.4 rnrn
Y W
15rnrn15rnrn 1 I
E E
c( M = 5 7 g
d
cu 1 ~6.55 rnrn -6.55 rnrn a r: tfi
6.93 m r n x k-H
38.05 rnrn " 38.05 rnrn Figura 11.56 e
11.11. Una polea doble consiste en dos discos, delga- dos, uniformes, unidos a través de sus centros de masa. Si las masas de los discos son m, y m2t y sus ra- dios son H, y Hz, respectivamente (fig. 11.57), obtenga el momento de inercia con respecto al centro de masa de la polea.
11.12. Con referencia al ejercicio 11.8, demuestre que el centro de masa C del cuerpo compuesto se encuen- tra a una distancia de 0.189 m de C2, que es el centro de masa de la placa 2. 11.13. Un disco circular delgado, uniforme, tiene un radio de 4.7 c m y una masa de 2.4 kg. Calcule su mo- mento de inercia con respecto a un punto sobre la pe- riferia del anillo.
11.14. Demuestre que el momento angular I j de una partícula que forma parte de una placa delgada tiene el mismo sentido que el vector de velocidad angular w (véase el párrafo después de la ec. (11.22)). 11.15. Demuestre que en una placa delgada con UP punto fijo, las torcas ejercidas sobre cada una de las partículas tienen la misma dirección y el mismo sen- tido. 11.16. En el ejercicio 11.9, demuestre que las unida- des de la aceleración angular a dadas (rad/s2) son las correctas. 11.17. iPor qué la placa del ejercicio 11.11 no gira cuando está sujeta a las clavijas A y B? 11.18. Una barra uniforme de longitud 2.7 m y que pesa 4 kg está f i ja en el punto O (fig. 11.33). Se le apli- ca una fuerza F de magnitud 13 kg perpendicular a la barra a una distancia de 1.3 m de O. )Con que acelera- ción angular gira la barra?
S i la fuerza F se aplicara a una distancia de 2.5 m del punto O, )cuál sería la aceleración angular resul- tante? 11.19. Una barra delgada, rectangular y uniforme de longitud 1.4 m y masa 85 k g está f i ja en el punto A (fig. 11 .SS). Una fuerza horizontal F de magnitud 154 kg se aplica en el extremo B. Calcule la aceleración angular de la barra.
I
11.20. E l volante mostrado en la figura 11.59 es un disco, delgado, uniforme, que pesa 264 k g y tiene ra- dio de 50 cm. E l coeficiente de fricción entre el disco y la banda es 0.35. Inicialmente el volante está giran- do con una velocidad angular de 278 rpm en el sentido mostrado. 2Qué fuerza F se debe aplicar a la banda para detener el volante en 5 S ? Explique físicamente por qué se detiene el volante. 11.21. Dos discos uniformes y delgados se ponen en contacto aplicando una fuerza de 3.6 kg a la barra A B (fig. 11.60). E l disco 1, que pesa 8 kg, gira con una velo- cidad angular o1 de 653 rpm en el sentido mostrado, mientras que el disco 2, que pesa 23 kg, está inicial- mente en reposo. E l coeficiente de fricción entre los discos es 0.43. Desprecie la fricción en los ejes.
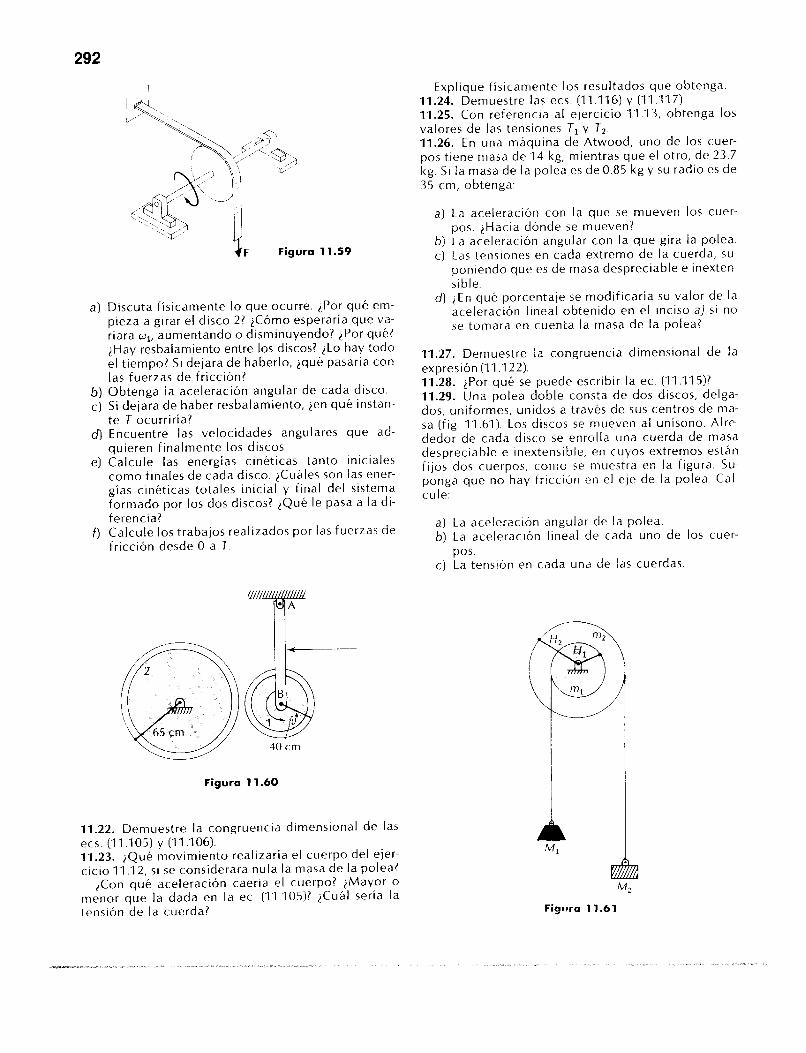
292 1
)F Figura 11.59
Discuta físicamente lo que ocurre. iPor qué em- pieza a girar el disco 23 >Cómo esperaría que va- riara a,, aumentando o disminuyendo? iPor qué? >Hay resbalamiento entre los discos? iLo hay todo el t iempo? Si dejara de haberlo, iqué pasaría con las fuerzas de fricción? Obtenga la aceleración angular de cada disco. S i dejara de haber resbalamiento, jen qué instan- te T ocurriría? Encuentre las velocidades angulares que ad- quieren finalmente los discos. Calcule las energías cinéticas tanto iniciales como finales de cada disco. >Cuáles son las ener- gías cinéticas totales inicial y final del sistema formado por los dos discos? iQué le pasa a la di- ferencia? Calcule los trabajos realizados por las fuerzas de fricción desde O a J .
'T ! !-
40 cm
Figura 11.60
11.22. Demuestre la congruencia dimensional de las ecs. (11.105) y (11.106). 11.23. iQué movimiento realizaría el cuerpo del ejer- cicio 11.12, s i se considerara nula la masa de la polea?
¿Con qué aceleración caerla el cuerpo? iMayor o menor que la dada en la ec. (11 105)? iCuál sería la tension de la cuerda?
Explique fisicamente los resultados que obtenga. 11.24. Demuestre las ecs. (11.116) y (11.117). 11.25. Con referencia al ejercicio I 1 .I 3, obtenga los valores de las tensiones T, y T,. 11.26. En una máquina de Atwood, uno de los cuer- pos tiene masa de 14 kg, mientras que el otro, de 23.7 kg. S i la masa de la polea es de 0.85 kg y su radio es de 35 cm, obtenga:
a) La aceleración con la que se mueven los cuer-
O ) La aceleración angular con la que gira la polea. c) Las tensiones en cada extremo de la cuerda, su-
poniendo que es de masa despreciable e inexten- sible.
dj iEn qué porcentaje se modificaría su valor de la aceleración lineal obtenido en el inciso a) si no se tomara en cuenta la masa de la polea?
pos. >Hacia dónde se mueven?
11.27. Demuestre la congruencia dimensional de la expresión ( I 1 .I 22). 11.28. iPor qué se puede escribir la ec. (11.115)? 11.29. Una polea doble consta de dos discos, delga- dos, uniformes, unidos a través de sus centros de ma- sa (fig. 11.61). Los discos se mueven al unísono. Alre- dedor de cada disco se enrolla una cuerda de masa despreciable e inextensible, en cuyos extremos están fijos dos cuerpos, como se muestra en la figura. Su- ponga que no hay friccihn en el eje de la polea Cal- cule:
a) La aceleración angular de la polea. b) La aceleración lineal de cada uno de los cuer-
c) La tensión en cada una de las cuerdas. pos.
M:
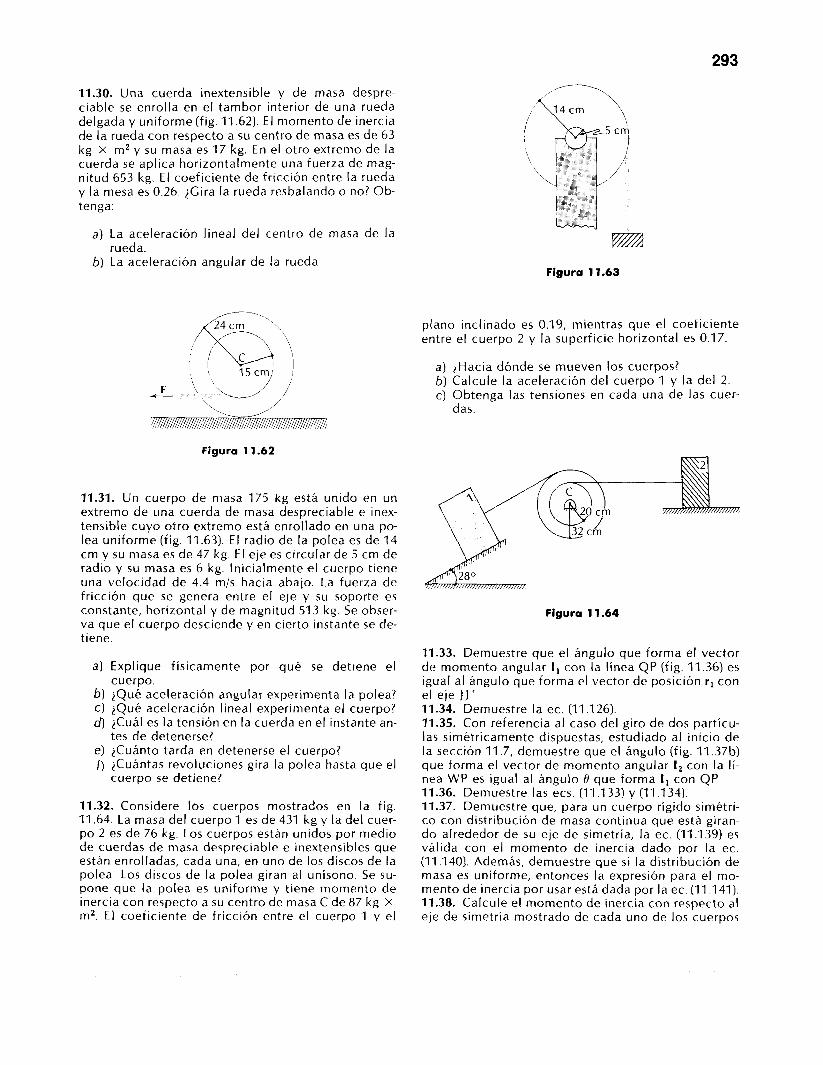
293
11.30. Una cuerda inextensible y de masa despre- ciable se enrolla en el tambor interior de una rueda delgada y uniforme(fig. 11.62). E l momento de inercia de la rueda con respecto a su centro de masa es de 63 kg X m, y su masa es 1 7 kg. En el otro extremo de la cuerda se aplica horizontalmente una fuerza de mag- nitud 653 kg. E l coeficiente de fricción entre la rueda y la mesa es 0.26. 2Cira la rueda resbalando o no? Ob- tenga:
a) La aceleración lineal del centro de masa de la
b) La aceleración angular de la rueda rueda.
Figura 1 1.62
11.31. Un cuerpo de masa 175 kg está unido en un extremo de una cuerda de masa despreciable e inex- tensible cuyo otro extremo está enrollado en una po- lea uniforme (fig. 11.63). E l radio de la polea es de 14 cm y su masa es de 47 kg. E l eje es circular de 5 cm de radio y su masa es 6 kg. Inicialmente el cuerpo tiene una velocidad de 4.4 mis hacia abajo. La fuerza de fricción que se genera entre el eje y su soporte es constante, horizontal y de magnitud 51 3 kg. Se obser- va que el cuerpo desciende y en cierto instante se de- tiene.
a) Explique físicamente por qué se detrene el
b) iQué aceleración angular experimenta la polea? c) iQué aceleración lineal experimenta el cuerpo? d) iCuál es la tensión en la cuerda en el instante an-
e) 2Cuánto tarda en detenerse el cuerpo? f) iCuántas revoluciones gira la polea hasta que el
cuerpo.
tes de detenerse?
cuerpo se detiene?
11.32. Considere los cuerpos mostrados en la fig. 11.64. La masa del cuerpo 1 es de 431 kg y la del cuer- po 2 es de 76 kg. Los cuerpos están unidos por medio de cuerdas de masa despreciable e inextensibles que están enrolladas, cada una, en uno de los discos de la polea. Los discos de la polea giran al unísono. Se su- pone que la polea es uniforme y t iene momento de inercia con respecto a su centro de masa C de 87 kg x m,. E l coeficiente de fricción entre el cuerpo 1 y el
Figura 1 1.63
plano inclinado es 0.19, mientras que el Coeficiente entre el cuerpo 2 y la superficie horizontal es 0.17.
a) iHacia dónde se mueven los cuerpos? b) Calcule la aceleración del cuerpo 1 y la del 2. c) Obtenga las tensiones en cada una de las cuer-
das.
Figura 1 1.64
11.33. Demuestre que el ángulo que forma el vector de momento angular I , con la línea QP (fig. 11.36) es igual al ángulo que forma el vector de posición r, con el eje J J ' 11.34. Demuestre la ec. (11.126). 11.35. Con referencia al caso del giro de dos partícu- las simétricamente dispuestas, estudiado al inicio de la sección 11.7, demuestre que el ángulo (fig. 11.37b) que forma el vector de momento angular I , con la Ií- nea WP es igual al ángulo 0 que forma I , con QP 11.36. Demuestre las ecs. (11.133) y (11.134). 11.37. Demuestre que, para un cuerpo rígido simétri- co con distribución de masa continua que está giran- do alrededor de su eje de simetría, la ec. (11.139) es válida con el momento de inercia dado por la ec. (11.140). Además, demuestre que s i la distribución de masa es uniforme, entonces la expresión para el mo- mento de inercia por usar está dada por la ec. (11.141). 11.38. Calcule el momento de inercia con respecto al eje de simetría mostrado de cada uno de los cuerpos
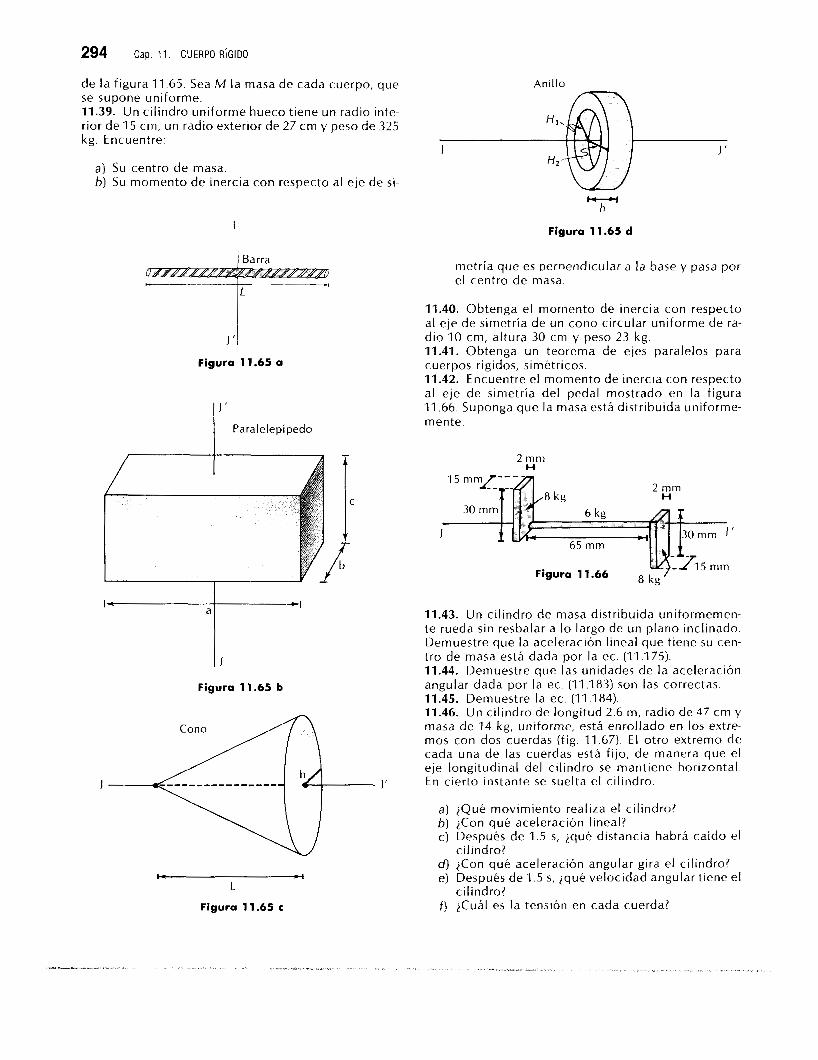
294 Cap. 11. CUERPO RíGIDO
de la figura 11.65. Sea M la masa de cada cuerpo, que Anillo se supone uniforme. 11.39. Un cil indro uniforme hueco t iene un radio inte- rior de 1 5 cm, un radio exterior de 27 cm y peso de 325 kg. Encuentre:
J I' a) Su centro de masa. b) Su momento de inercia con respecto al eje de si- -
h
' j Figura 11.65 d
Figura 1 1.65 a
l J ' Paralelepípedo
metria que es Dernendicular a la base y pasa por el centro de masa.
11.40. Obtenga el momento de inercia con respecto al eje de simetría de un cono circular uniforme de ra- dio 10 cm, altura 30 cm y peso 23 kg. 11.41. Obtenga un teorema de ejes paralelos para cuerpos rígidos, simétricos. 11.42. Encuentre el momento de inercia con respecto al eje de simetría del pedal mostrado en la figura 11.66. Suponga que la masa está distribuida uniforme- mente.
2 mm H
'I5 mm
11.43. Un cilindro de masa distribuida uniformemen- te rueda sin resbalar a lo largo de un plano inclinado. Demuestre que la aceleración lineal que tiene su cen- tro de masa está dada por la ec. (11.175). 11.44. Demuestre que las unidades de la aceleración
11.45. Demuestre la ec. (11.184). 11.46. Un cilindro de longitud 2.6 m, radio de 47 cm y masa de 14 kg, uniforme, está enrollado en los extre- mos con dos cuerdas (fig. 11.67). E l otro extremo de cada und de las cuerdas está fijo, de manera que el eje longitudinal del cilindro se mantiene horizontal.
Figura 11.65 b angular dada por la ec. (11.183) son las correctas.
J En cierto instante se suelta el cilindro.
E -I L
Figura 11.65 c
a ) >Qué movimiento realiza el ci l indro? b) >Con qué aceleración lineal? c) Después de 1.5 S, iqué distancia habrá caído el
d) icon qué aceleración angular gira el ci l indro? e) Despuks de 1 .S S, iqué velocidad angular tiene el
f) >Cuál es la tensión en cada cuerda?
cil indro?
cil indro?
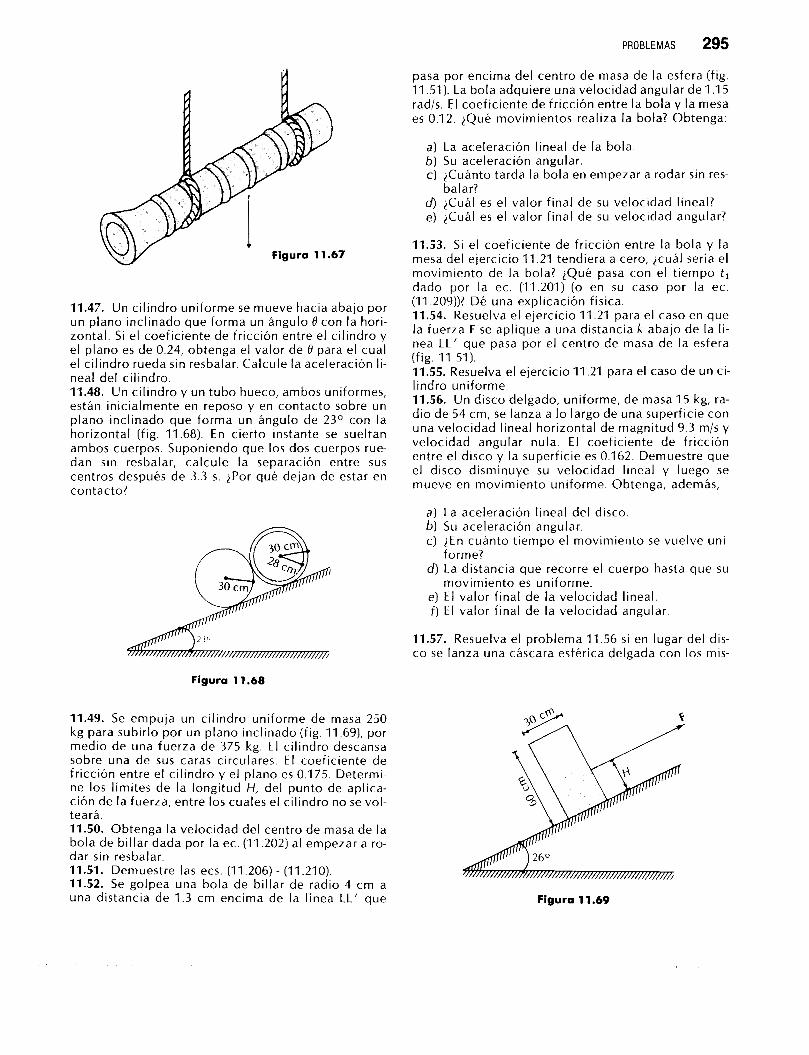
PROBLEMAS 295
pasa por encima del centro de masa de la esfera (fig. 11.51). La bola adquiere una velocidad angular de 1 .I 5 radis. E l coeficiente de fricción entre la bola y la mesa es 0.12. )Qué movimientos realiza la bola? Obtenga:
a) La aceleración lineal de la bola. b) Su aceleración angular. c) iCuánto tarda la bola en empezar a rodar sin res-
d) )Cuál es el valor final de su velocidad lineal? e) )Cuál es el valor final de su velocidad angular?
11.53. Si el coeficiente de fricción entre la bola y la mesa del ejercicio 11.21 tendiera a cero, )cuál sería el movimiento de la bola? )Qué pasa con el t iempo t l dado uor la ec. Ill .201) lo en su caso Dor la ec.
balar?
11.47. Un cil indro uniforme se mueve hacia abajo por un plano inclinado que forma un ángulo 8 con la hori- zontal. Si el coeficiente de fricción entre el cilindro y el plano es de 0.24, obtenga el valor de 8 para el cual el cilindro rueda sin resbalar. Calcule la aceleración Ii- neal del cilindro. 11.48. Un ci l indro y un tubo hueco, ambos uniformes, están inicialmente en reposo y en contacto sobre un plano inclinado que forma un ángulo de 23O con la horizontal (fig. 11.68). En cierto instante se sueltan ambos cuerpos. Suponiendo que los dos cuerpos rue- dan sin resbalar, calcule la separación entre sus centros después de 3.3 s. )Por qué dejan de estar en contacto?
(11.209))? Dé una explicacion física. 11.54. Resuelva el ejercicio 11.21 para el caso en que la fuerza F se aplique a una distancia k abajo de la l í - nea LL’ que pasa por el centro de masa de la esfera (fig. 11.51). 11.55. Resuelva el ejercicio 11.21 para el caso de un ci- lindro uniforme. 11.56. Un disco delgado, uniforme, de masa 15 kg, ra- dio de 54 cm, se lanza a lo largo de una superficie con una velocidad lineal horizontal de magnitud 9.3 m/s y velocidad angular nula. E l coeficiente de fricción entre el disco y la superficie es 0.162. Demuestre que el disco disminuye su velocidad lineal y luego se mueve en movimiento uniforme. Obtenga, además,
a) La aceleración lineal del disco. b) Su aceleración angular. c) iEn cuánto tiempo el movimiento se vuelve uni-
d ) La distancia que recorre el cuerpo hasta que su
e) E l valor final de la velocidad lineal. f ) E l valor final de la velocidad angular.
forme?
movimiento es uniforme.
11.57. Resuelva el problema 11.56 s i en lugar del dis- co se lanza una cáscara esférica delgada con los mis-
Figura 1 1.68
11.49. Se empuja un cilindro uniforme de masa 250 kg para subirlo por un plano inclinado (f ig. 11.69), por medio de una fuerza de 375 kg. E l cilindro descansa sobre una de sus caras circulares. E l coeficiente de fricción entre el cilindro y el plano es 0.175. Determi- ne los límites de la longitud H, del punto de aplica- ción de la fuerza, entre los cuales el cilindro no se vol- teará. 11.50. Obtenga la velocidad del centro de masa de la bola de billar dada por la ec. (11.202) al empezar a ro- dar sin resbalar. 11.51. Demuestre las ecs. (11,206) - (11.210). 11.52. Se golpea una bola de billar de radio 4 cm a una distancia de 1.3 cm encima de la línea LL’ que Figura 1 1.69

296 Cap. 11. CUERPO RíGIDO
mos valores de la masa, radio, velocidad y coeficiente de fricción. S i obtiene resultados distintos a los del problema 11.56, explique la causa. 11.58. En el ejercicio 11.21 se encontraron los tiem- pos t l después de los cuales la bola empieza a rodar sin resbalar para los dos casos posibles (véanse las ecs. (11.201) y (11,209)). En ambos casos, el t iempo t l resulta ser inversamente proporcional al coeficiente
de fricción entre la bola y el paño de la mesa p. 2Qué ocurre si p - O ? ¿O s i p - a? Dé una explicación físi- ca de sus respuestas. 11.59. En relación con la placa delgada que gira con un punto fijo, tratada en el ejercicio 11.11, vemos que cada punto de la placa recorre un círculo. ¿Quién ejerce la fuerza centrípeta necesaria? 2Quién ejerce la fuerza tangencial?
12 Estd t i ca
12.1. ESTÁTICA
La estática es aquella parte de la mecánica que tra- ta de las condiciones bajo las cuales un cuerpo, sujeto a diversas fuerzas externas, permanece en reposo. Así, por ejemplo, el caso de un edificio o de un puente, que son estructuras que están sujetas a diferentes fuerzas y que obviamente deben permanecer en reposo.
Solamente consideraremos cuerpos rígidos. De lo aprendido en el capítulo 11 sabemos que los movi- mientos más generales que puede realizar un cuerpo rígido son el de traslación de su centro de masa auna- do al de rotación alrededor del mencionado punto. E l movimiento de traslación del centro de masa está re- gido por la ec. (9.31)
Fext. = MA (12.1)
En esta ecuación Fexr, es la fuerza externa total que se aplica sobre el cuerpo; M es su masa total y A es la
aceleración del centro de masa. Por otro lado, el mo- vimiento de rotación alrededor del centro de masa está regido por la ec. (1 1.33)
(Text.)CM = I C C U (1 2.2)
siendo la torca de las fuerzas externas con respecto al centro de masa, IC el momento de inercia del cuerpo rígido con respecto a un eje que pasa por su centro de masa y, por último, a la aceleración angu- lar resultante.
Ahora bien, si se quiere que un cuerpo rígido no se mueva, entonces su centro de masa no debe trasla- darse y además no debe haber rotación alguna con respecto a éste. Por tanto, s i inicialmente el cuerpo está en reposo, se quiere que siga estando en reposo. En consecuencia, las aceleraciones tanto lineal como angular deben anularse
A = O (1 2.3)
a = o (1 2.4)
Por tanto, las ecs (12.1) y (12.2) quedan en este caso como
(1 2.5)
V
Recordemos ahora la ec. (10.95) que nos relaciona las torcas de las fuerzas externas con respecto a dos puntos: el centro de masa y un punto arbitrario O
297
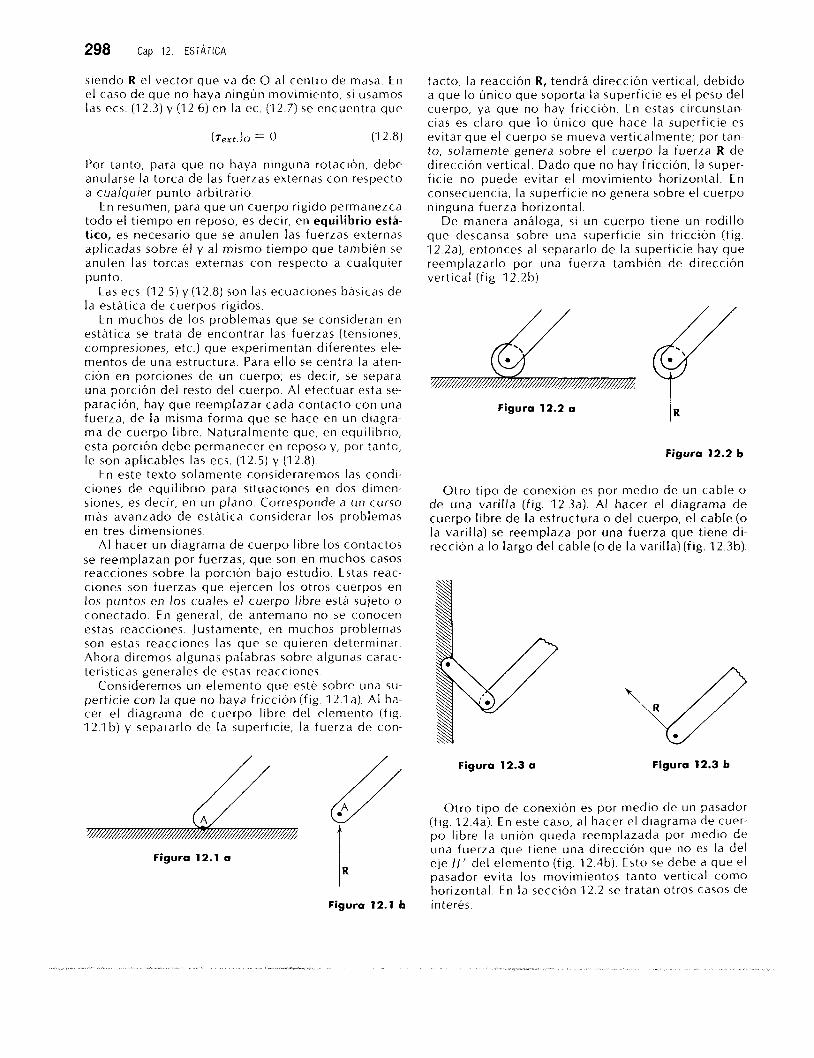
298 Cap. 12. ESTÁTICA
siendo R el vector que va de O al centro de masa. En el caso de que no haya ningún movimiento, si usamos las ecs. (1 2.3) y (1 2.6) en la ec. (1 2.7) se encuentra que
( 7 e x t h = 0 (I 2.8)
Por tanto, para que no haya ninguna rotación, debe anularse la torca de las fuerzas externas con respecto a cualquier punto arbitrario.
En resumen, para que un cuerpo rígido permanezca todo el t iempo en reposo, es decir, en equilibrio está- tico, es necesario que se anulen las fuerzas externas aplicadas sobre éI y al mismo tiempo que también se anulen las torcas externas con respecto a cualquier punto.
Las ecs. (12.5) y (12.8) son las ecuaciones básicas de la estática de cuerpos rígidos.
En muchos de los problemas que se consideran en estática se trata de encontrar las fuerzas (tensiones, compresiones, etc.) que experimentan diferentes ele- mentos de una estructura. Para el lo se centra la aten- ción en porciones de un cuerpo; es decir, se separa una porción del resto del cuerpo. AI efectuar esta se- paración, hay que reemplazar cada contacto con una fuerza, de la misma forma que se hace en un diagra- ma de cuerpo l ibre. Naturalmente que, en equil ibrio, esta porción debe permanecer en reposo y, por tantc, le son aplicables las ecs. (12.5) y (12.8).
En este texto solamente consideraremos las condi- ciones de equilibrio para situaciones en dos dimen- siones, es decir, en un plano. Corresponde a un curso más avanzado de estática considerar los problemas en tres dimensiones.
AI hacer un diagrama de cuerpo libre los contactos se reemplazan por fuerzas, que son en muchos casos reacciones sobre la porción bajo estudio. Estas reac- ciones son fuerzas que ejercen los otros cuerpos en los puntos en los cuales el cuerpo libre está sujeto o conectado. En general, de antemano no se conocen estas reacciones. Justamente, en muchos problemas son estas reacciones las que se quieren determinar Ahora diremos algunas palabras sobre algunas carac- terísticas generales de estas reacciones
Consideremos un elemento que esté sobre una su- perficie con la que no haya fricción (fig. 12.1 a). AI ha- cer el diagrama de cuerpo libre del elemento (fig. 12 . l b ) y separarlo de la superficie, la fuerza de con-
Figura 12.1 a I R Figura 12.1 b
tacto, la reacción R, tendrá dirección vertical, debido a que lo Único que soporta la superficie es el peso del cuerpo, ya que no hay fricción. En estas circunstan- cias es claro que lo Único que hace la superficie es evitar que el cuerpo se mueva verticalmente; por tan- to, solamente genera sobre el cuerpo la fuerza R de dirección vertical. Dado que no hay fricción, la super- ficie no puede evitar e l movimiento horizontal. En consecuencia, la superficie no genera sobre el cuerpo ninguna fuerza horizontal.
De manera análoga, s i un cuerpo tiene un rodillo que descansa sobre una superficie sin fricción (fig. 12.2a), entonces a l separarlo de la superficie hay que reemplazarlo por una fuerza también de dirección vertical (fig 12.2b).
Figura 12.2 a / R
Figura 12.2 b
Otro t ipo de conexión es por medio de un cable o de una varilla (fig. 12.3a). AI hacer el diagrama de cuerpo libre de la estructura o del cuerpo, el cable (o la varil la) se reemplaza por una fuerza que tiene di- rección a lo largo del cable (o de la varilla) (fig. 12.3b).
Figura 12.3 a Figura 12.3 b
Otro t ipo de conexión es por medio de un pasador (fig. 12.4a). En este caso, al hacer el diagrama de cuer- po libre la unión queda reemplazada por medio de una fuerza que tiene una dirección que no es la del eje 1)’ del elemento (fig. 12.4b). Esto se debe a que el pasador evita los movimientos tanto vertical como horizontal. En la sección 12.2 se tratan otros casos de interés.
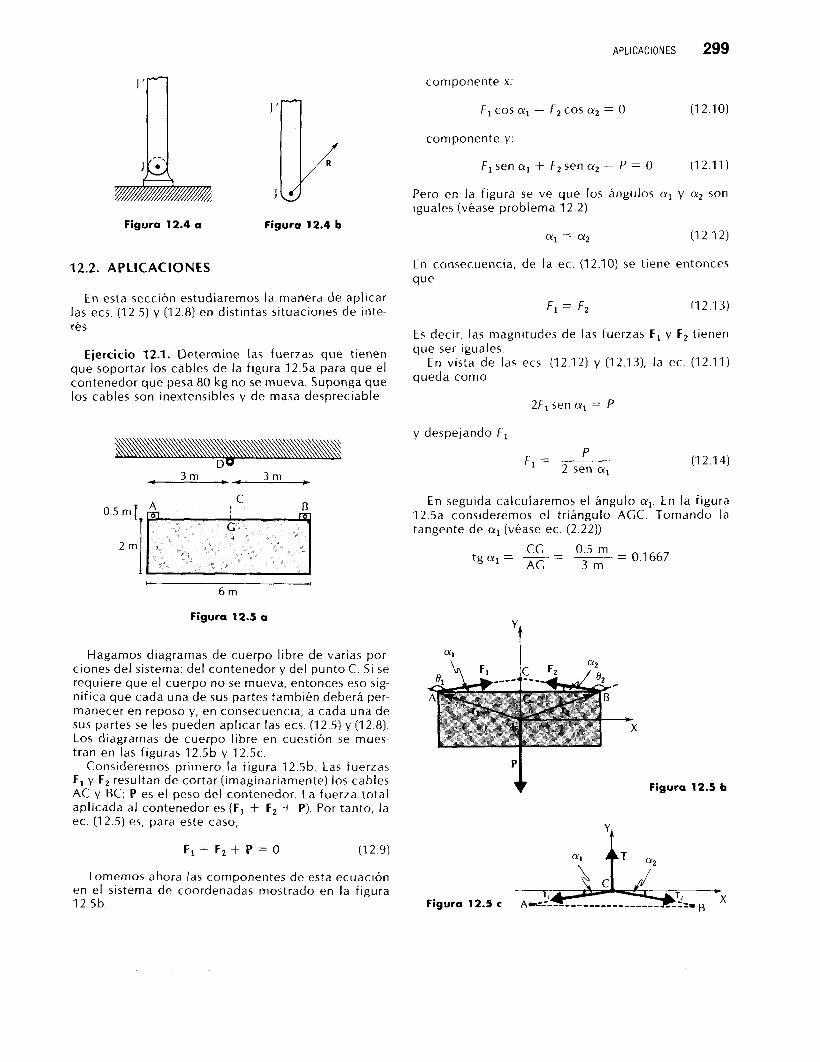
APLICACIONES 299
componente x:
F , COS CY, - F, COS CY, = O (1 2.1 O)
componente y:
F , sen cy, + F, sen 01, - P = O (12.11)
Pero en la figura se ve que los ángulos cy, y cy2 son iguales (véase problema 12.2)
Figura 12.4 a Figura 12.4 b CY, = CY2 (1 2.1 2)
12.2. APLICACIONES
En esta sección estudiaremos la manera de aplicar las ecs. (12.5) y (12.8) en distintas situaciones de inte-
En consecuencia, de la ec. (12.10) se tiene entonces que
f , = F, I1 2.1 3) rés E s decir, las magnitudes de las fuerzas F , y F2 tienen
En vista de las ecs. (12.12) y (12.13), la ec. (12.11) Ejercicio 12.1. Determine las fuerzas que tienen que ser iguales.
que soportar los cables de la figura 12.5a para que el contenedor que pesa 80 kg no se mueva. Suponga que queda 'Orno los cables son inextensibles y de masa despreciable. 2F, sen CY, = P
y despejando F , P
2 sen CY, F , = 3 m - ~ 3 m *
(1 2.1 4)
r
I 6 m
En seguida calcularemos el ángulo cy,. En la figura 12.5a consideremos el triángulo ACC. Tomando la tangente de CY, (véase ec. (2.22))
Figura 12.5 a
Hagamos diagramas de cuerpo libre de varias por- ciones del sistema: del contenedor y del punto C. Si se requiere que el cuerpo no se mueva, entonces eso sig- nifica que cada una de sus partes también deberá per- manecer en reposo y, en consecuencia, a cada una de sus partes se les pueden aplicar las ecs. (12.5) y (12.8). Los diagramas de cuerpo libre en cuestión se mues- tran en las figuras 12.5b y 1 2 . 5 ~ .
Consideremos primero la figura 12.5b. Las fuerzas F, y F, resultan de cortar (imaginariamente) los cables AC y BC; P es el peso del contenedor. La fuerza total aplicada al contenedor es (F, + F , + P). Por tanto, la ec. (12.5) ec, para este caso,
F , + F , + P = O (1 2.91
Tomemos ahora las componentes de esta ecuación en el sistema de coordenadas mostrado en la figura 12.5b.
ff1 t. ff2
Figura 12.5 b
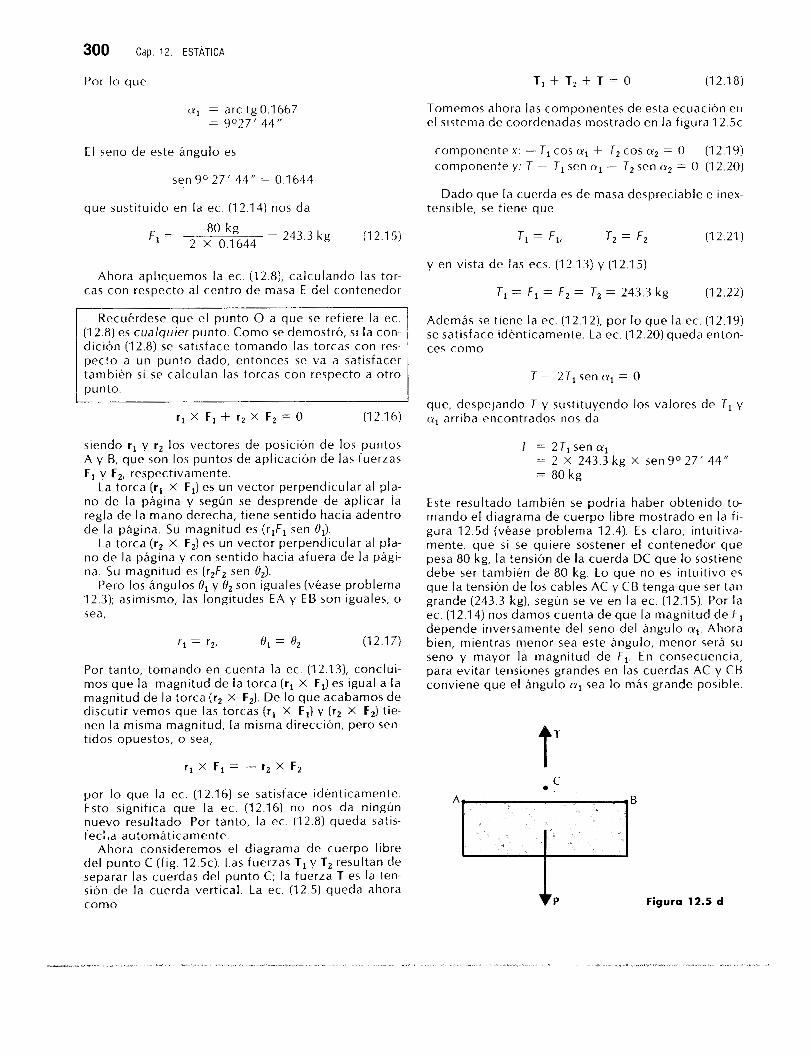
300 Cap. 1 2 . ESTATICA
Por lo que T , + T , + T = O (1 2.1 8)
CY, = arc tg 0.1667 = 9O27 ' 44"
E l seno de este ángulo es
sen 9 O 27 ' 44" = 0.1644
que sustituido en la ec. (12.14) nos dd
F, = 8o kg = 243.3 kg (12.15) 2 X 0.1644
Tomemos ahora las componentes de esta ecuación en el sistema de coordenadas mostrado en la figura 12 5c
componente x: - T , cos a, + T, cos CY, = O (12.19) componente y: T - T, sen CY, - T , sen CY, = O (1 2.20)
Dado que la cuerda es de masa despreciable e inex- tensible, se tiene que
(12.21)
y en vista de las ecs. (12.13) y (12.1 5) Ahora apliquemos la ec. (12.8), calculando las tor-
cas con respecto al centro de masa E del contenedor 1, = F, = F , = T , = 243.3 kg (1 2.22)
(1 2.8) es cualquier punto. Como se demostró, s i la con- dición (12.8) se satisface tomando las torcas con res- pecto a un punto dado, entonces se va a satisfacer también s i se calculan las torcas con respecto a otro punto.
r , X F , + r , X F , = O (1 2.1 6)
siendo r , y r2 los vectores de posición de los puntos A y B, que son los puntos de aplicación de las fuerzas F , y F,, respectivamente.
La torca (r , X F,) es un vector perpendicular al pla- no de la página y según se desprende de aplicar la regla de la mano derecha, tiene sentido hacia adentro de la página. Su magnitud es (r,F, sen 0,).
La torca (r, X F,) es un vector perpendicular al pla- no de la página y con sentido hacia afuera de la pági- na. Su magnitud es (r,Fz sen O,).
Pero los ángulos 0, y O , son iguales (véase problema 12.3); asimismo, las longitudes EA y E6 son iguales, o sea,
r l = r2, O , = 8, (1 2.1 7)
Por tanto, tomando en cuenta la ec. (12.13), conclui- mos que la magnitud de la torca (r , X F,) es igual a la magnitud de la torca (r , x F,). De lo que acabamos de discutir vemos que las torcas (r , X F,) y (r, X F2) tie- nen la misma magnitud, la misma dirección, pero sen- tidos opuestos, o sea,
r , X F , = - r2 X F 2
Además se tiene la ec. (12.12), por lo que la ec. (12.19) se satisface identicamente. La ec. (1 2.20) queda enton- ces como
T - 2T, sen a, = O
que, despejando T y sustituyendo los valores de 7 , y CY, arriba encontrados nos da
T = 2T, sen 01, = 2 X 243.3 kg X sen 9 O 27' 44" = 80 kg
Este resultado también se podría haber obtenido to- mando el diagrama de cuerpo l ibre mostrado en la f i- gclra 12.5d (véase problema 12.4). E s claro, intuitiva- mente, que s i se quiere sostener el contenedor que pesa 80 kg, la tensión de la cuerda DC que lo sostiene debe ser también de 80 kg. Lo que no es intuit ivo es que la tensión de los cables AC y C B tenga que ser tan grande (243.3 kg), según se ve en la ec. (12.15). Por la ec. (12.14) nos damos cuenta de que la magnitud de F, depende inversamente del seno del ángulo a,. Ahora bien, mientras menor sea este ángulo, menor será su seno y mayor la magnitud de F,. En consecuencia, para evitar tensiones grandes en las cuerdas AC y CB conviene que el ángulo CY, sea lo más grande posible.
t' I ,- L
por lo que la ec. (12.16) se satisface idénticamente. Esto significa que la ec. (12.16) no nos da ningún
A ) , .I3 nuevo resultado, Por tanto, la ec. (12.8) queda satis- feci,ct automáticamente.
Ahora consideremos el diagrama de cuerpo libre del punto C (f ig. 1 2 . 5 ~ ) . Las fuerzas T, y T, resultan de separar las cuerdas del punto C; la fuerza T es la ten- sión de la cuerda vertical. La ec. (12.5) queda ahora como VP Figura 12.5 d
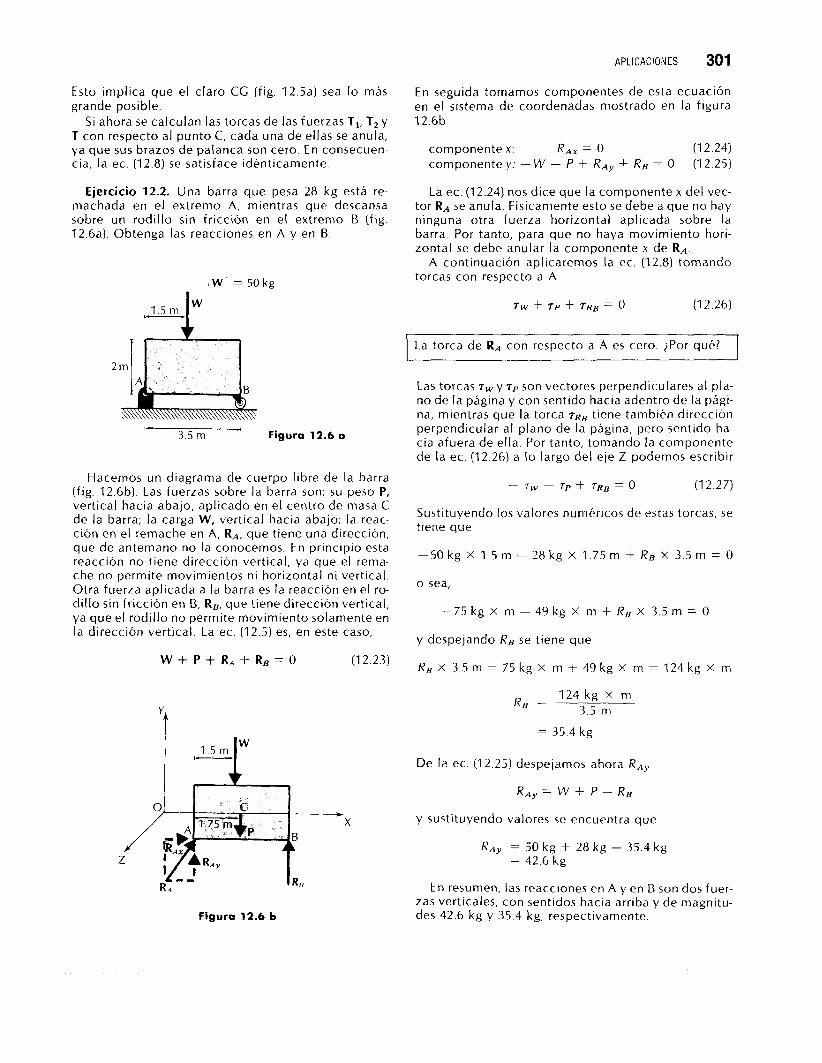
APLICACIONES 301
Esto implica que el claro CC (fig. 12.5a) sea lo más grande posible.
S i ahora se calculan las torcas de las fuerzas TI, T, y T con respecto al punto C, cada una de ellas se anula, ya que sus brazos de palanca son cero. En consecuen- cia, la ec. (12.8) se satisface idénticamente.
Ejercicio 12.2. Una barra que pesa 28 k g está re- machada en el extremo A, mientras que descansa sobre un rodillo sin fricción en el extremo B (fig. 12.6a). Obtenga las reacciones en A y en B.
I W I = 5 0 k g
4 1 . 5 m
1 La torca de RA con respecto a A es cero. ?Por qué? I
3 .5 m Figura 12.6 a i
Hacemos un diagrama de cuerpo libre de la barra (fig. 12.6b). Las fuerzas sobre la barra son: su peso P, vertical hacia abajo, aplicado en el centro de masa C de la barra; la carga W, vertical hacia abajo; la reac- ción en el remache en A, RA, que tiene una dirección, que de antemano no la conocemos. En principio esta reacción no tiene dirección vertical, ya que el rema- che no permite movimientos ni horizontal ni vertical. Otra fuerza aplicada a la barra es la reacción en el ro- dillo sin fricción en B. RB, que tiene dirección vertical, ya que el rodil lo no permite movimiento solamente en la dirección vertical. La ec. (12.5) es, en este caso,
W + P + R , + R g = O (1 2.23)
‘t
+ X
Figura 12.6 b
En seguida tomamos componentes de esta ecuación en el sistema de coordenadas mostrado en la figura 12.6b
componente x: Rax = O (12.24) componente y: - W - P + RAY + Rg = O (12.25)
La ec. (12.24) nos dice que la componente x del vec- tor RA se anula. Físicamente esto se debe a que no hay ninguna otra fuerza horizontal aplicada sobre la barra. Por tanto, para que no haya movimiento hori- zontal se debe anular la componente x de RA.
A continuación aplicaremos la ec. (12.8) tomando torcas con respecto a A
7 W + 7 P + 7Rg = O (1 2.26)
Las torcas 7 w y 7p son vectores perpendiculares al pla- no de la página y con sentido hacia adentro de la pági- na, mientras que la torca 7Hs tiene también dirección perpendicular al plano de la página, pero sentido ha- cia afuera de ella. Por tanto, tomando la componente de la ec. (12.26) a lo largo del eje Z podemos escribir
- Tw - T p + 7178 = 0 (12.27)
Sustituyendo los valores numéricos de estas torcas, se tiene que
-50 kg X 1 . 5 m - 28 kg x 1.75 m + RB X 3.5 m = O
o sea,
-75 kg X m - 49 kg X m + RR X 3.5 m = O
y despejando Re se tiene que
RR X 3.5 m = 75 kg X m + 49 kg X m = 124 kg X m
Rs = 124 kg X m 3.5 m
= 35.4 kg
De 12 ec. (12.25) despejamos ahora RAY
RAY = W + P - Rs
y sustituyendo valores se encuentra que
R A ~ = 50 kg + 28 kg - 35.4 kg = 42.6 kg
En resumen, las reacciones en A y en B son dos fuer- zas verticales, con sentidos hacia arriba y de magnitu- des 42.6 kg y 35.4 kg, respectivamente.
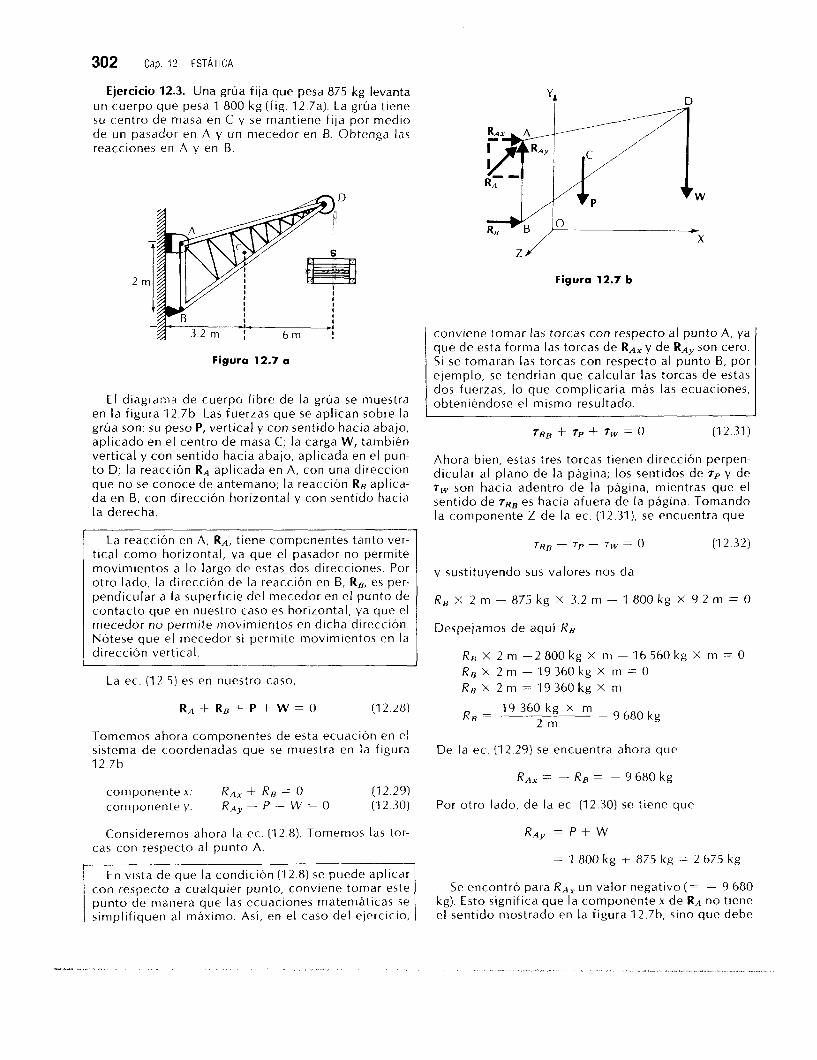
302 Cap. 1 2 . ESTATICA
Ejercicio 12.3. Una grúa fija que pesa 875 kg levanta un cuerpo que pesa 1 800 kg (fig. 12.7a). La grúa tiene su centro de masa en C y se mantiene fija por medio de un pasador en A y un mecedor en B. Obtenga las reacciones en A v en B.
2 1
Figura 12.7 a
E l diagiaml de cuerpo l ibre de la grúa se muestra en la figura 12.7b. Las fuerzas que se aplican sobre la grúa son: su peso P, vertical y con sentido hacia abajo, aplicado en el centro de masa C; la carga W, también vertical y con sentido hacia abajo, aplicada en el pun- to D; la reacción RA aplicada en A, con una dirección que no se conoce de antemano; la reacción Re aplica- da en B, con dirección horizontal y con sentido hacia la derecha.
La reacción en A, RA, tiene componentes tanto ver- tical como horizontal, ya que el pasador no permite movimientos a lo largo de estas dos direcciones. Por otro lado, la dirección de la reacción en B, RB, es per- pendicular a la superficie del mecedor en el punto de contacto que en nuestro caso es horizontal, ya que el mecedor no permite movimientos en dicha dirección. Nótese que el mecedor sí permite movimientos en la dirección vertical.
La ec. (12.5) es en nuestro caso,
R A + R ~ + P + W = O (1 2.18)
Tomemos ahora componentes de esta ecuación en e! sistema de coordenadas que se muestra en la figura 12.7b
componente x: R A ~ + RR = O (1 2.29) componente y : R A Y - P - W = O (12 30)
Consideremos ahora la ec. (12.8). Tomemos las tor- cas con respecto al punto A.
En vista de que la condición (12.8) se puede aplicar con respecto a cualquier punto, conviene tomar este punto de manera que las ecuaciones matemáticas se simplifiquen al máximo. Así, en el caso del ejercicio,
D
W
Z
Figura 12.7 b
conviene tomar las torcas con respecto al punto A, ya que de esta forma las torcas de Rax y de RAY son cero. Si se tomaran las torcas con respecto al punto B, por ejemplo, se tendrían que calcular las torcas de estas
1 dos fuerzas, lo que complicaría más las ecuaciones, obteniéndose el mismo resultado.
7~~ + Tp + 7w 0 (12.31)
Ahora bien, estas tres torcas tienen dirección perpen- dicular al plano de la página; los sentidos de TP y de T~ son hacia adentro de la página, mientras que el sentido de rRB es hacia afuera de la página. Tomando la componente Z de la ec. (12.31), se encuentra que
TRR - T p - rw = 0 (1 2.32)
y sustituyendo sus valores nos da
Re X 2 m - 875 kg X 3.2 m - 1 800 kg X 9.2 m = 0
Despejamos de aquí RB
Re X 2 m -2 800 kg X m - 16 560 kg X m = O Re X 2 m - 1 9 3 6 0 k g X m = O Re X 2 m = 1 9 3 6 0 k g X m
RB = l 9 360 kg x m = 9 680 kg 2 m
De la ec. (12.29) se encuentra ahora que
RAx = - RE = - 9 680 kg
Por otro lado, de la ec. (12.30) se tiene que
RAY = P + W
= 1 800 kg + 875 kg = 2 675 kg
Se encontró para Rax un valor negativo ( = - 9 680 kg). Esto significa que la componente x de RA no tiene el sentido mostrado en la figura 12.7b, sino que debe
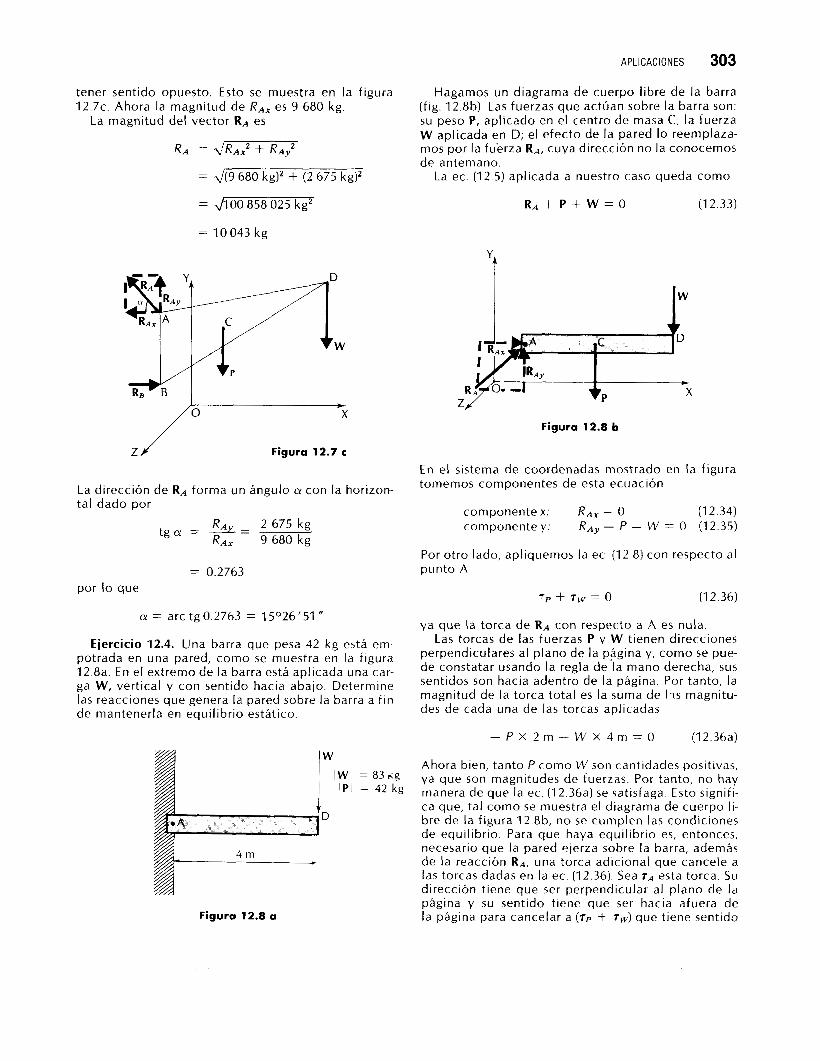
APLICACIONES 303
tener sentido opuesto. Esto se muestra en la figura 12.7~. Ahora la magni tud de RAx es 9 680 kg.
La magnitud del vector RA es
RA = . J R ~ ~ ~ + ~~~2
= d(9 680 kg)* + (2 675 kgj2
= 4100 858 025 kg2
= 10043 kg
/" x
Z Figura 12.7 c
La dirección de RA forma un ángulo (Y con la horizon- tal dado por
t g a = RAy= 2 675 kg RAx 9 680 kg
= 0.2763 por lo que
(Y = arc tg 0.2763 = 15O26'51 "
Ejercicio 12.4. Una barra que pesa 42 kg está em- potrada en una pared, como se muestra en la figura 12.8a. En el extremo de la barra está aplicada una car- ga W, vertical y con sentido hacia abajo. Determine las reacciones que genera la pared sobre la barra a fin de mantenerla en equilibrio estático.
D
Figura 12.8 a
W
IW I P
I = I =
83 kg 42 kg
Hagamos un diagrama de cuerpo libre de la barra (fig. 12.8b). Las fuerzas que actúan sobre la barra son: su peso P, aplicado en el centro de masa C; la fuerza w aplicada en D; el efecto de la pared lo reemplaza- mos por la fuerza RA, cuya dirección no la conocemos de antemano.
La ec. (12.5) aplicada a nuestro caso queda como
R A + P + W = O (1 2.33)
Iw I ,C D
I I
Figura 12.8 b
En el sistema de coordenadas mostrado en la figura tomemos componentes de esta ecuación
componentex: RAx = O (12.34) componente y : R A ~ - P - W = O (12.35)
Por otro lado, apliquemos la ec (12.8) con respecto al punto A
T p + 7 w = o (1 2.36)
ya que la torca de RA con respecto a A es nula. Las torcas de las fuerzas P y W tienen direcciones
perpendiculares al plano de la pagina y, como se pue- de constatar usando la regla de la mano derecha, sus sentidos son hacia adentro de la página. Por tanto, la magnitud de la torca total es la suma de 11s magnitu- des de cada una de las torcas aplicadas
- P x 2 m " W x 4 m = O (1 2.36a)
Ahora bien, tanto P como W son cantidades positivas, ya que son magnitudes de fuerzas. Por tanto, no hay manera de que la ec. (12.36a) se satisfaga. Esto signifi- ca que, tal como se muestra el diagrama de cuerpo Ii- bre de la f igura 12.8b, no se cumplen las condiciones de equilibrio. Para que haya equilibrio es, entonces, necesario que la pared ejerza sobre la barra, además de la reacción RA, una torca adicional que cancele a las torcas dadas en la ec. (12.36). Sea 7A esta torca. Su dirección tiene que ser perpendicular al plano de la página y su sentido tiene que ser hacia afuera de la página para cancelar a (7p + T ~ ) que tiene sentido
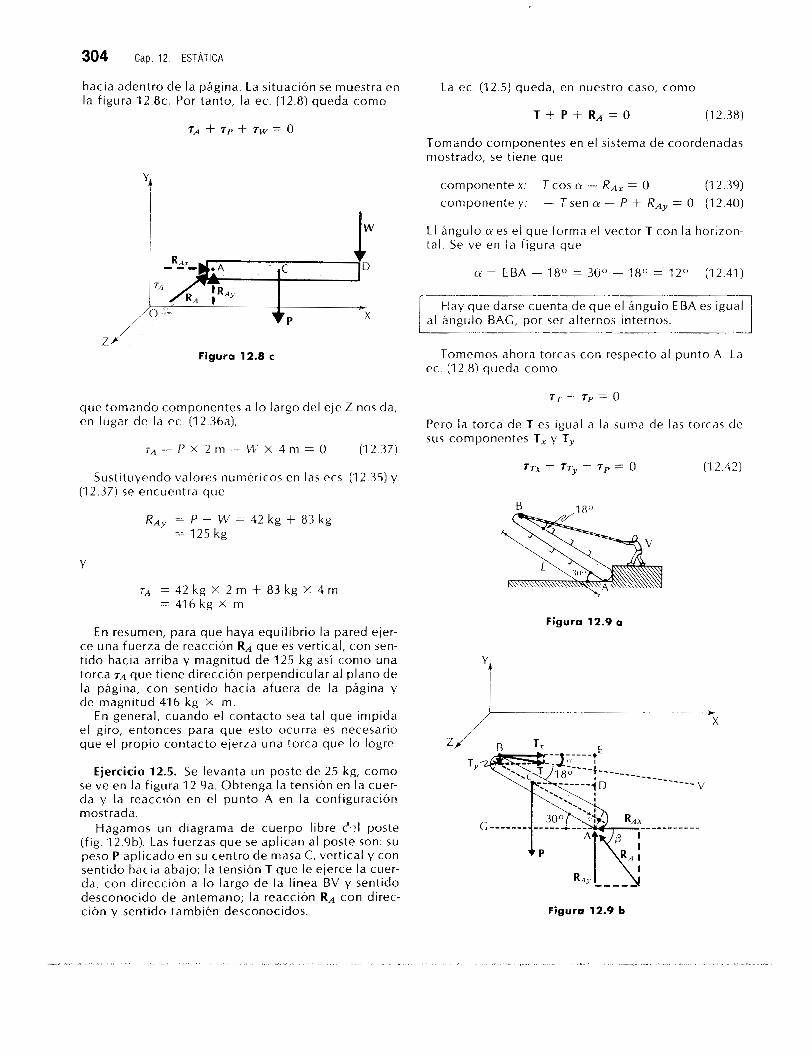
304 Cap. 12. ESTÁTICA
hacia adentro de la página. La situación se muestra en la figura 1 2 . 8 ~ . Por tanto, la ec. (12.8) queda como
Iw
z Figura 12.8 c
que tomando componentes a lo largo del eje Z nos da, en lugar de la ec. (12.36a1,
T~ - P X 2 m - W X 4 m = O (12.37)
Sustituyendo valores numéricos en las ecs. (1 2.35) y (12.37) se encuentra que
R A , ~ P + W = 42 kg + 83 kg = 125 kg
V
T A = 4 2 k g X 2 m + 8 3 k g X 4 m = 416kg X m
En resumen, para que haya equilibrio la pared ejer- ce una fuerza de reacción RA que es vertical, con sen- tido hacia arriba y magnitud de 125 kg así como una torca 7.4 que tiene dirección perpendicular al plano de la página, con sentido hacia afuera de la página y de magnitud 416 kg X m.
En general, cuando el contacto sea tal que impida e l giro, entonces para que esto ocurra es necesario que el propio contacto ejerza una torca que lo logre.
Ejercicio 12.5. Se levanta un poste de 25 kg, como se ve en la figura 12.9a. Obtenga la tensión en la cuer- da y la reacción en el punto A en la configuración mostrada.
Hagamos un diagrama de cuerpo libre c',?l poste (fig. 12.9b). Las fuerzas que se aplican al poste son: s u peso P aplicado en su centro de masa C, vertical y con sentido hacia abajo; la tensión T que le ejerce la cuer- da, con dirección a lo largo de la línea BV y sentido desconocido de antemano; la reacción RA con direc- ción y sentido también desconocidos.
La ec. (12.5) queda, en nuestro caso, como
T + P + R n = O (1 2.38)
Tomando componentes en el sistema de coordenadas mostrado, se tiene que
componente x: J cos N - RA, = O (12.39) componente y: - Tsen CY - P + RAY = O (12.40)
E l hngulo N es el que forma el vector T con la horizon- tal. Se ve en la figura que
r CY EBA - 18O = 30' - 18" = 12" (12.41)
Elay que darse cuenta de que el ángulo EBA es igual al ángulo BAG, por ser alternos internos.
Tomemos ahora torcas con respecto al punto A. La ec. (12.8) queda como
7 r f 7 p = 0
Pero la torca de T es igual a la suma de las torcas de sus componentes T, y 1,
73-, + 7 T J , + T p = o (1 2.42)
I "
Figura 12.9 a
"L X
4 ' T.vT$;q" t -"" \i
c"""- ""- "" """""-
R.4 I
Figura 12.9 b
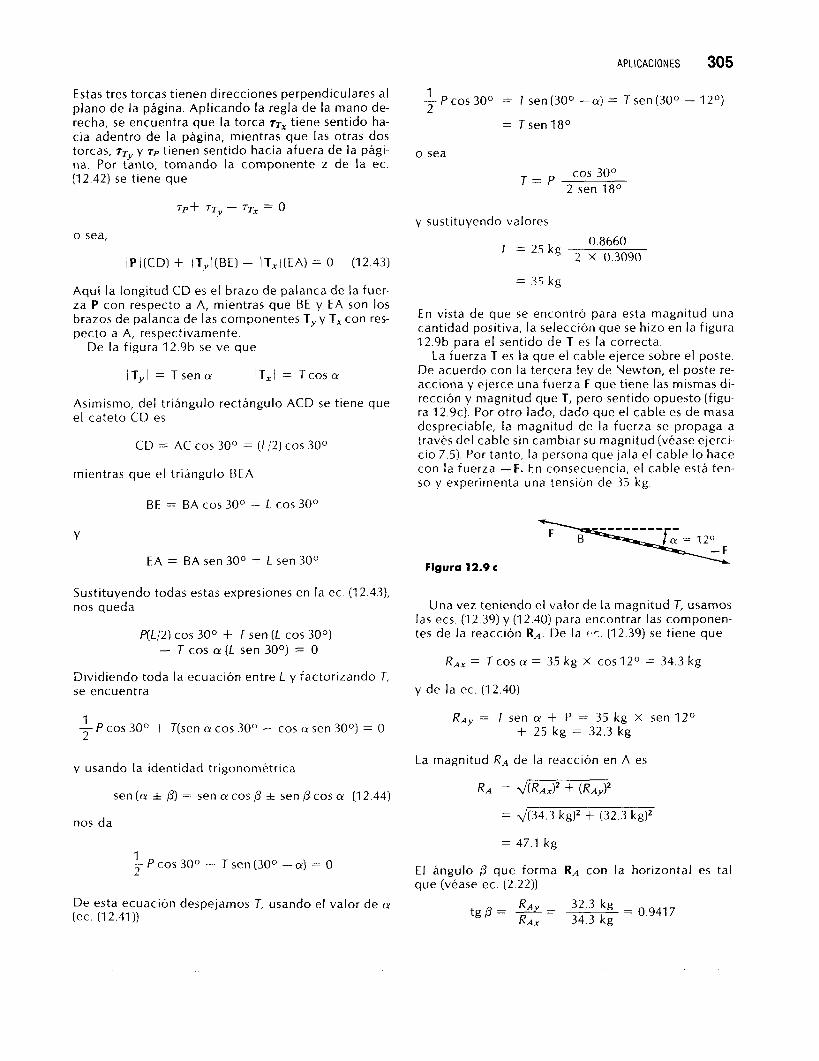
APLICACIONES 305
Estas tres torcas tienen direcciones perpendiculares al plano de la página. Aplicando la regla de la mano de- recha, se encuentra que la torca 7Tx tiene sentido ha- cia adentro de la página, mientras que las otras dos torcas, T~,, y 7p tienen sentido hacia afuera de la pági- na. Por tanto, tomando la componente z de la ec. (12.42) se tiene que
7 p + 7 T y - 7 T x = o
o sea,
/ P / ( C D ) + /Ty/(BE) - ITXI(EA1 = O (12.43)
Aquí la longitud CD es el brazo de palanca de la fuer- za P con respecto a A, mientras que BE y EA son los brazos de palanca de las componentes 1, y 1, con res- pecto a A, respectivamente.
De la figura 12.9b se ve que
lTyl = T sen a I T X I = TCOSCY
Asimismo, del triángulo rectángulo ACD se tiene que el cateto CD es
CD = AC cos 30° = (L/2) cos 30°
mientras que el triángulo BEA
BE = BA cos 30' = L COS 30'
Y
EA = BA sen 30° = L sen 30°
Sustituyendo todas estas expresiones en la ec. (12.43), nos queda
P(L/2) cos 30° + T sen ( L cos 30°) - T cos CY ( L sen 30°) = O
Dividiendo toda la ecuación entre L y factorizando T, se encuentra
1 - P cos 30° + T(sen a cos 30° - cos a sen 30°) = O 2
y usando la identidad trigonométrica
sen (a f @) = sen CY cos @ f sen @cos a (1 2.44)
nos da
-Pcos30° - Tsen(30' -a) = O 1 2
De esta ecuación despejamos T, usando el valor de CY (ec. (12.41))
- I p COS 300 = T sen (300 -CY) = T sen (30' - 12') 2
= Tsenl8O
o sea
T = P cos 30° 2 sen 18O
y sustituyendo valores
T = 25 kg 0.8660 2 X 0.3090
= 3.5 kg
En vista de que se encontró para esta magnitud una cantidad positiva, la selección que se hizo en la figura 12.9b para el sentido de T es la correcta.
La fuerza T es la que el cable ejerce sobre el poste. De acuerdo con la tercera ley de Newton, el poste re- acciona y ejerce una fuerza F que tiene las mismas di- recclón y magnitud que T, pero sentido opuesto (figu- ra 1 2 . 9 ~ ) . Por otro lado, dado que el cable es de masa despreciable, la magnitud de la fuerza se propaga a través del cable sin cambiar su magnitud (véase ejerci- cio 7.5). Por tanto, la persona que jala el cable lo hace con la fuerza -F. En consecuencia, el cable está ten- so y experimenta una tensión de 35 kg.
Figura 12.9 c
Una vez teniendo el valor de la magnitud T, usamos las ecs. (12.39) y (12.40) para encontrar las componen- tes de la reacción RA. De la <.<. (12.39) se tiene que
RAx = T COS CY 35 kg X C O S I ~ O 34.3 kg
y de la ec. (12.40)
RAY = T sen CY + P = 35 kg X sen I Z O + 25 kg = 32.3 kg
La magnitud RA de la reacci6n en A es
= 47.1 kg
E l ángulo 0 que forma que (véase ec. (2.22))
RA con la horizontal es ta l
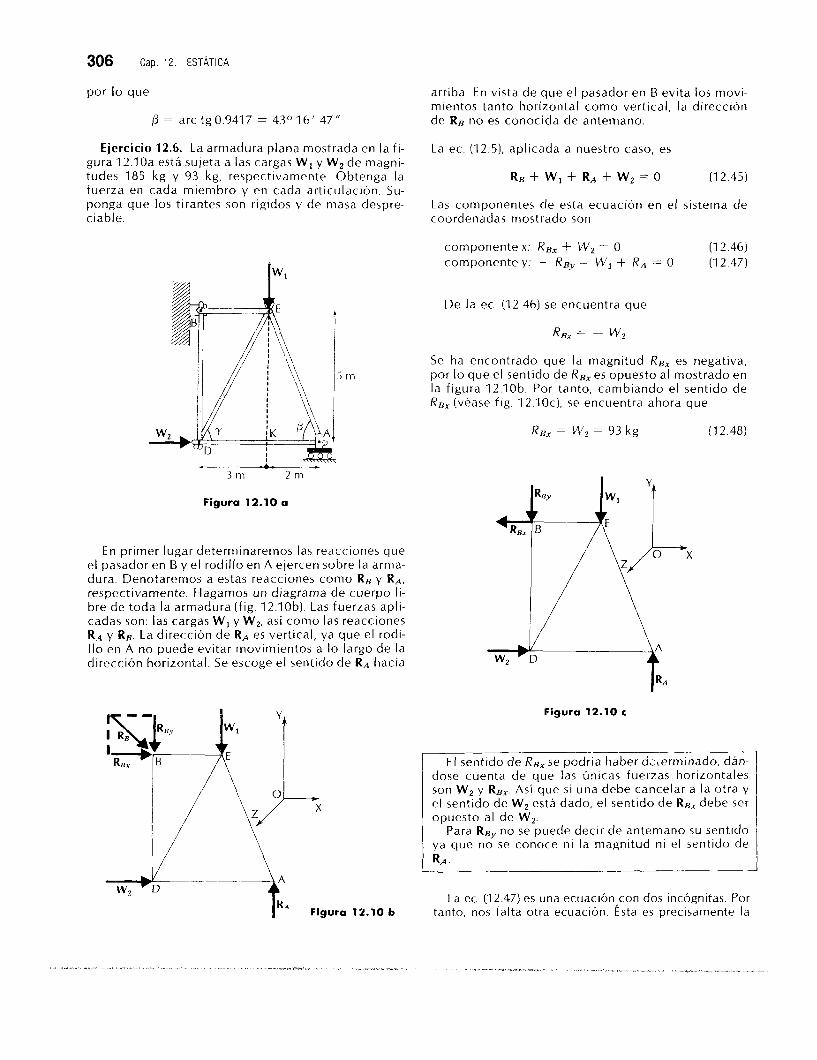
306 Cap. 1 2 . ESTÁTICA
por lo que
0 = arc tg0.9417 = 43O16' 47"
Ejercicio 12.16. La armadura plana mostrada en la f i- gura 12.10a está sujeta a las cargas W, y W, de magni- tudes 185 kg y 93 kg, respectivamente. Obtenga la fuerza en cada miembro y en cada articulación. Su- ponga que los tirantes son rígidos y de masa despre- ciable.
3m 2 m
Figura 12.10 a
En primer lugar determinaremos las reacciones que el pasador en B y el rodillo en A ejercen sobre la arma- dura. Denotaremos a estas reacciones como RB y RA, respectivamente. Hagamos un diagrama de cuerpo Ii- bre de toda la armadura (fig. 12.10b). Las fuerzas apli- cadas son: las cargas W, y W,, así como las reacciones RA y RB. La dirección de RA es vertical, ya que el rodi- llo en A no puede evitar movimientos a lo largo de la direcci6n horizontal. Se escoge el sentido de RA hacia
+ X
Figura 12.10 b
arriba. En vista de que el pasador en B evita los movi- mientos tanto horizontal como vertical, la dirección de Re no es conocida de antemano.
La ec. (12.5), aplicada a nuestro caso, es
Re + W, + RA + W, = O (1 2.45)
Las componentes de esta ecuación en el sistema de coordenadas mostrado son
componente x: Rex + W, = O (1 2.46) componente y: - Rey - W1 + RA = 0 (1 2.47)
De la ec. (12.46) se encuentra que
Se ha encontrado que la magnitud RBx es negativa, por lo que el sentido de Rex es opuesto al mostrado en la figura 12.10b. Por tanto, cambiando el sentido de RBx (véase fig. 12.10c), se encuentra ahora que
Rex = W, = 93 kg (1 2.48)
Figura 12.10 c
E l sentido de Rex se podria haber dccerminado, dán- dose cuenta de que las únicas fuerzas horizontales son W, y RBx. Así que s i una debe cancelar a la otra y PI sentido de W, está dado, el sentido de RBx debe ser opuesto al de W,.
Para Rey no se puede decir de antemano su sentido ya que no se conoce ni la magnitud ni el sentido de RA .
La ec. (12.47) es una ecuación,con dos incógnitas. Por tanto, nos falta otra ecuación. Esta es precisamente la
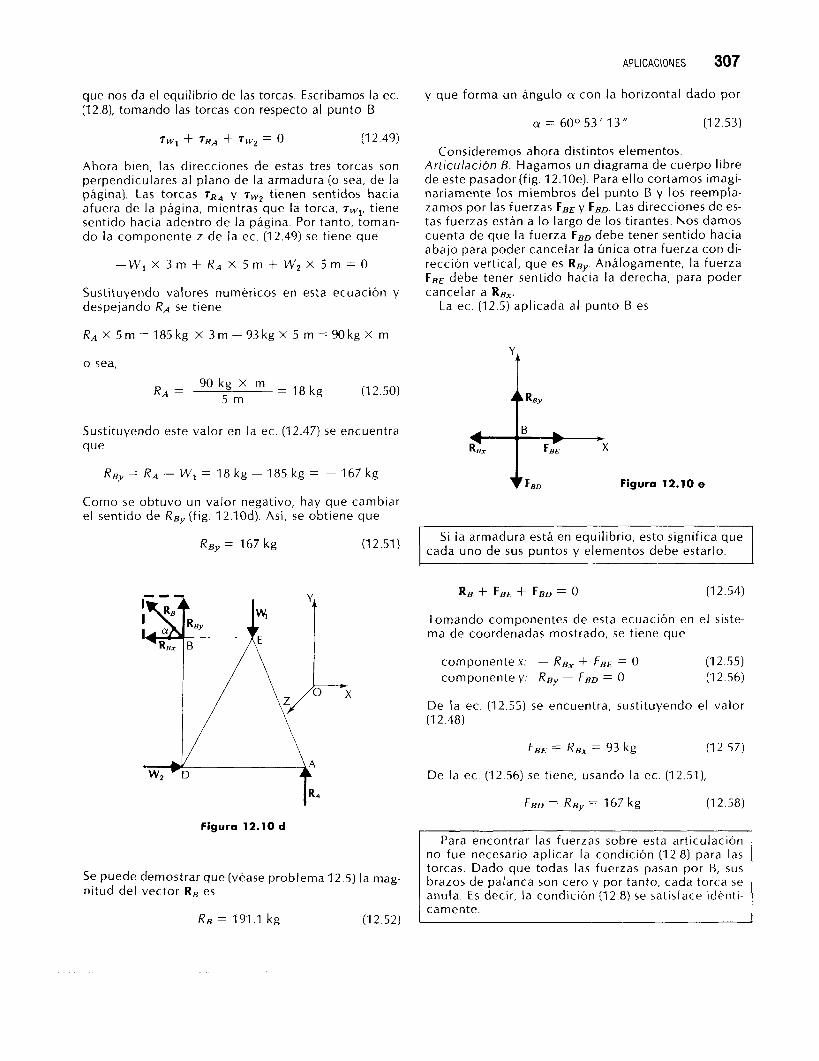
APLICACIONES 307
que nos da el equilibrio de las torcas. Escribamos la ec. (12.8), tomando las torcas con respecto al punto B
7wl + TRA + 7w2 = O (1 2.49)
Ahora bien, las direcciones de estas tres torcas son perpendiculares al plano de la armadura (o sea, de la página). Las torcas 7RA y T~~ tienen sentidos hacia afuera de la página, mientras que la torca, 7w1, tiene sentido hacia adentro de la página. Por tanto, toman- do la componente z de la ec. (12.49) se tiene que
- W l X 3 m + R A X 5 m + W 2 X 5 m = 0
Sustituyendo valores numéricos en esta ecuación y despejando RA se tiene
RA X 5 m = 185kg X 3 m - 9 3 k g X 5 m = 90kg x m
o sea,
RA = 90 k g x m = 1 8 k g (1 2.50) 5 m
Sustituyendo este valor en la ec. (12.47) se encuentra que
Rey RA - W1 = 18 kg - 185 kg = - 167 kg
Como se obtuvo un valor negativo, hay que cambiar el sentido de Rey (fig. 12.10d). Así, se obtiene que
RBy 167 kg (12.51)
Figura 12.10 d
Se puede demostrar que (véase problema 12.5) la mag- nitud del vector R B es
Re 191.1 kg (12.52)
y que forma un ángulo (Y con la horizontal dado por
(Y = 60° 5 3 ' 1 3 " (1 2.53)
Consideremos ahora distintos elementos. Articulación B. Hagamos un diagrama de cuerpo libre de este pasador (fig. 12.10e). Para ello cortamos imagi- nariamente los miembros del punto B y los reempla- zamos por las fuerzas FBE y Feo. Las direcciones de es- tas fuerzas están a lo largo de los tirantes. Nos damos cuenta de que la fuerza FBD debe tener sentido hacia abajo para poder cancelar la única otra fuerza con di- rección vertical, que es Rey.. Análogamente, la fuerza FBE debe tener sentido hacla la derecha, para poder cancelar a Rex.
La ec. (12.5) aplicada al punto B es
f
+ FBD Figura 12.10 e
Si ¡a armadura está en equilibrio, esto significa que cada uno de sus puntos y elementos debe estarlo.
..
RB + FBE + Feo O (1 2.54)
Tomando componentes de esta ecuación en el siste- ma de coordenadas mostrado, se tiene que
componente x: - Rex + FBE = O (1 2.55) componente y: RBy - FBD = O (12.56)
De la ec. (12.55) se encuentra, sustituyendo el valor (1 2.48)
FBE = RBx = 93 kg (12.57)
De la ec. (12.56) se tiene, usando la ec. (12.51),
FBD RBy = 167 kg (12.58)
no fue necesario aplicar la condición (12.8) para las torcas. Dado que todas las fuerzas pasan por B, sus brazos de palanca son cero y por tanto, cada torca se anula. E s decir, la condición (12.8) se satisface idénti- camente.
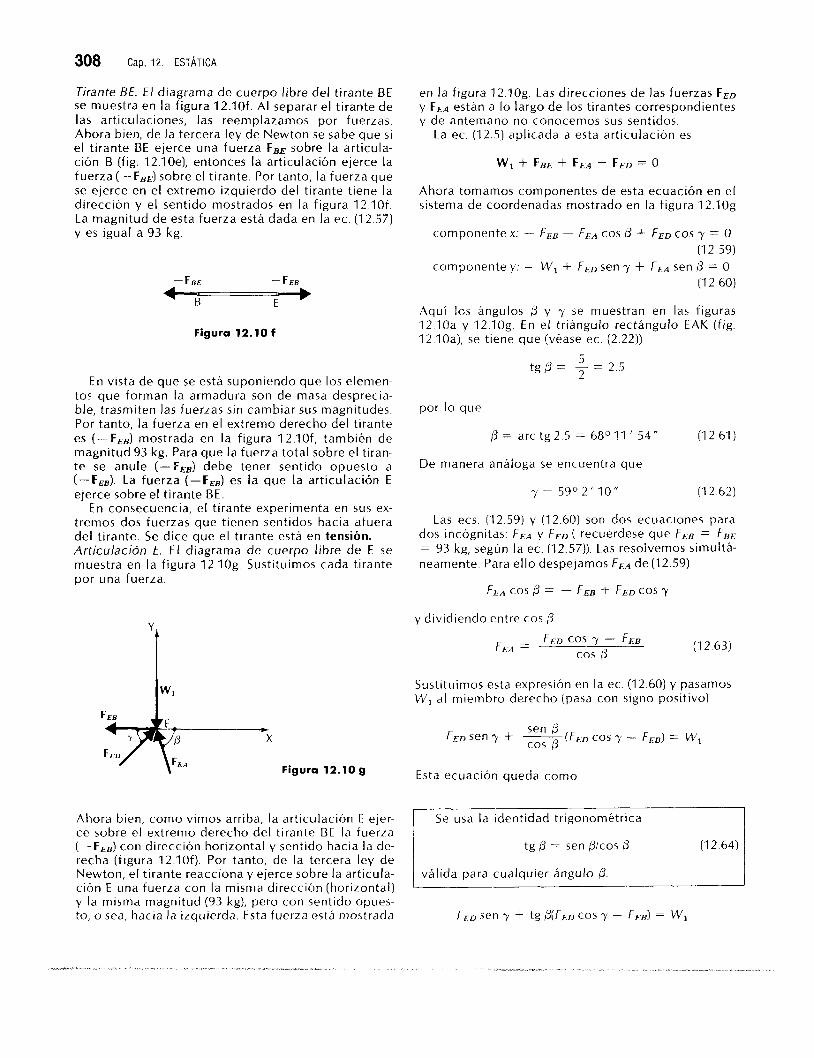
308 Cap. 12. ESTÁTICA
Tirante BE. E l diagrama de cuerpo libre del tirante BE se muestra en la figura 12.10f. Al separar el tirante de las articulaciones, las reemplazamos por fuerzas. Ahora bien, de la tercera ley de Newton se sabe que si el t irante BE ejerce una fuerza FEE sobre la articula- ción B (fig. 12.10e), entonces la articulación ejerce la fuerza ( - F E E ) sobre el tirante. Por tanto, la fuerza que se ejerce en el extremo izquierdo del tirante tiene la dirección y el sentido mostrados en la figura 12.10f. La magnitud de esta fuerza está dada en la ec. ( I 2.57) y es igual a 93 kg.
Figura 12.10 f
En vista de que se está suponiendo que los elemen- tos que forman la armadura son de masa desprecia- ble, trasmiten las fuerzas sin cambiar sus magnitudes. Por tanto, la fuerza en el extremo derecho del tirante es ( - F E E ) mostrada en la figura 12.10f, también de magnitud 93 kg. Para que la fuerza total sobre el tiran- te se anule ( - F E B ) debe tener sentido opuesto a ( - - F A La fuerza ( - F E s ) es la que la art iculación E ejerce sobre el tirante BE.
En consecuencia, el tirante experimenta en sus ex- tremos dos fuerzas que tienen sentidos hacia afuera del tirante. Se dice que el tirante está en tensión. Articulación E. E l diagrama de cuerpo libre de E se muestra en la figura 12.10g. Sustituimos cada tirante por una fuerza.
1 Figura 12.10 g
Ahora bien, como vimos arriba, la articulación E ejer- ce sobre el extremo derecho del tirante BE la fuerza ( - F E B ) con dirección horizontal y sentido hacia la de- recha (figura 12.1Of). Por tanto, de la tercera ley de Newton, el tirante reacciona y ejerce sobre la articula- ción E una fuerza con la misma dirección (horizontal) y la misma magnitud (93 kg), pero con sentido opues- to, o sea, hacia la izquierda. Esta fuerza está mostrada
en la figura 12.10g. Las direcciones de las fuerzas FED y FEA están a lo largo de los tirantes correspondientes y de antemano no conocemos sus sentidos.
La ec. (12.5) aplicada a esta articulación es
Ahora tomamos componentes de esta ecuación en el sistema de coordenadas mostrado en la figura 12.1Og
Componente x: - FEE - FEA cos (3 + FED cos y = O (12.59)
componente y: - W , + FED sen y + FEA sen = O (I 2.60)
Aquí los ángulos 0 y y se muestran en las figuras 12 10a y 12.1Og. En el tr iángulo rectángulo EAK (fig. '12.10a), se tiene que (véase ec. (2.22))
5 tg 6 = - = 2.5 2
por lo que
(3 = arc tg 2.5 = 6 8 O 11 ' 54" (12.61)
De manera análoga se encuentra que
y = 5 9 O 2 ' I O " (1 2.62)
Las ecs. (12.59) y (12.60) son dos ecuaciones para dos incógnitas: F E A y FED ( recuérdese que FEB = FBE
= 93 kg, según la ec. 112.57)). Las resolvemos simultá- neamente. Para ello despejamos FEA de (12.59)
FIiA COS (3 = - FEE + F E D COS y
y dividiendo entre cos /3
(1 2.63)
Sustituimos esta expresión en la ec. (12.60) y pasamos al miembro de.recho (pasa con signo positivo)
FED sen y + Esta ecuación queda como
I Se usa la identidad trigonométrica
tg 0 = sen Picos P (1 2.64)
I válida para cualquier ángulo P.
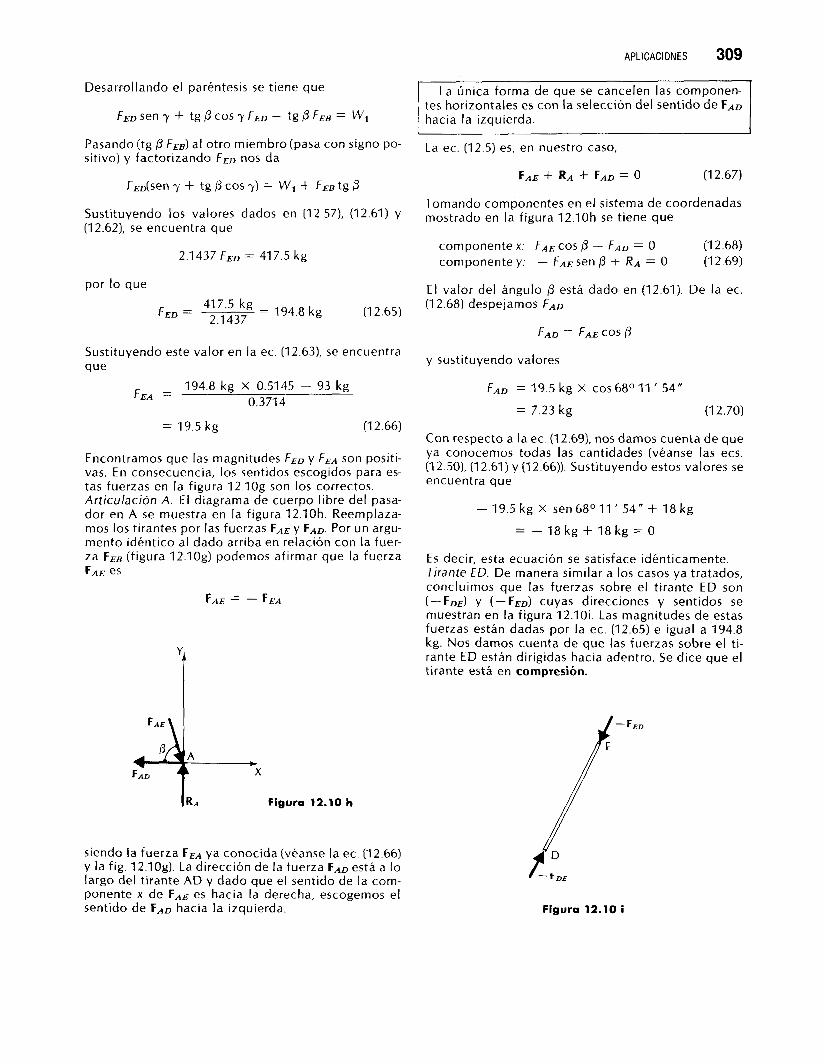
APLICACIONES 309
Desarrollando el paréntesis se tiene que
FED sen y + tg 0 cos y FED - tg 0 FE^ = W,
Pasando (tg 0 FEB) al otro miembro (pasa con signo po- sitivo) y factorizando F E D nos da
FED(sen y + tg /3 cos y) = W1 + FEE tg 0
Sustituyendo los valores dados en (12.57), (12.61) y (12.62), se encuentra que
2.1 437 FED = 41 7.5 kg
La única forma de que se cancelen las componen- tes horizontales es con la selección del sentido de FAD 1 hacia la izquierda.
La ec. (12.5) es, en nuestro caso,
FA€ + RA + FAD = O ( I 2.67)
Tomando componentes en el sistema de coordenadas mostrado en la figura 12.10h se tiene que
componente x: FAE cos 0 - FAD = O (1 2.68) componente y: - FAE sen /3 + RA = O (1 2.69)
por lo que E l valor del ángulo 0 está dado en (12.61). De la ec. (1 2.68) despejamos FAD
F E D = 41 7'5 kg z 194.8 kg (1 2.65) 2.1 437 FAD = FAE COS (I
Sustituyendo este valor en la ec. (12.63), se encuentra que
y sustituyendo valores
FEA = 194.8 kg X 0.51 45 - 93 kg
0.371 4
= 19.5 kg (1 2.66)
Encontramos que las magnitudes FED y FEA son positi- vas. En consecuencia, los sentidos escogidos para es- tas fuerzas en la figura 12.1Og son los correctos. Articulación A. E l diagrama de cuerpo libre del pasa- dor en A se muestra en la figura 12.10h. Reemplaza- mos los tirantes por las fuerzas FA€ y FAD. Por un argu- mento idéntico al dado arriba en relación con la fuer- za FEE (figura 12.10g) podemos afirmar que la fuerza FA€ es
F A E - F E A
I R.4 Figura 12.10 h
siendo la fuerza FEA ya conocida (véanse la ec. (12.66) y la fig. 12.10g). La dirección de la fuerza FAD está a lo largo del tirante AD y dado que el sentido de la com- ponente x de FAE es hacia la derecha, escogemos el sentido de FAD hacia la izquierda.
FAD 19.5 kg X COS 68'11 ' 54"
= 7.23 kg (1 2.70)
Con respecto a la ec. (12.69), nos damos cuenta de que ya conocemos todas las cantidades (véanse las ecs. (12.501, (12.61) y (12.66)). Sustituyendo estos valores se encuentra que
- 19.5 kg X sen 68O 11 ' 54" + 18 kg
= - 1 8 k g + 1 8 k g = O
E s decir, esta ecuación se satisface idénticamente. Tirante €D. De manera similar a los casos ya tratados, concluimos que las fuerzas sobre el tirante ED son (-FDE) y (-FED) cuyas direcciones y sentidos se muestran en la figura 12.1Oi. Las magnitudes de estas fuerzas están dadas por la ec. (12.65) e igual a 194.8 kg. Nos damos cuenta de que las fuerzas sobre el ti- rante ED están dirigidas hacia adentro. Se dice que el tirante está en compresión.
Figura 12.10 i
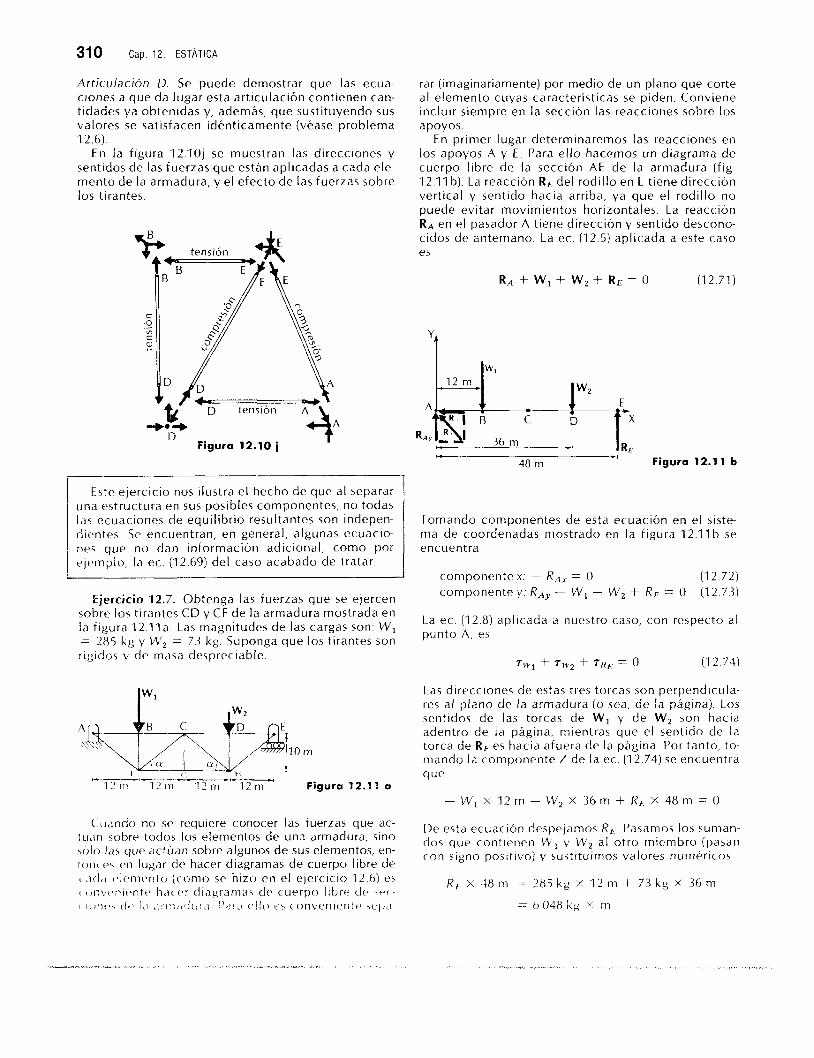
310 Cap. 1 2 . ESTÁTICA
Articulación D. Se puede demostrar que las ecua- ciones a que da lugar esta articulación contienen can- tidades ya obtenidas y, además, que sustituyendo sus valores se satisfacen idénticamente (véase problema 12.6).
En la figura 12.101 se muestran las direcciones y sentidos de las fuerzas que están aplicadas a cada ele- mento de la armadura, y el efecto de las fuerzas sobre los tirantes
U Figura 12.10 j I
I 1
Este ejercicio nos ilustra el hecho de que al separar una estructura en sus posibles componentes, no todas las ecuaciones de equilibrio resultantes son indepen- dientes. Se encuentran, en general, algunas ecuacio- ne5 que no dan información adicional, como por ejemplo, la ec. (12.69) del caso acabado de tratar.
Ejercicio 12.7. Obtenga las fuerzas que se ejercen sobre los tirantes CD y CF de la armadura mostrada en la figura 12.11a. Las magnitudes de las cargas son: W , = 285 kg y W, = 7_1 kg. Suponga que los tirantes son rígidos y de masa despreciable.
I","-
I 2 t v 12111 1 2 m 1 2 m Figura 12.1 1 a
rar (imaginariamente) por medio de un plano que corte al elemento cuyas características se piden. Conviene incluir siempre en la sección las reacciones sobre los apoyos.
En primer lugar determinaremos las reacciones en los apoyos A y E . Para ello hacemos un diagrama de cuerpo libre de la sección AE de la armadura (fig. 12.11 b). La reacción RE del rodillo en E tiene dirección vertical y sentido hacia arriba, ya que el rodillo no puede evitar movimientos horizontales. La reacción Ra en el pasador A tiene dirección y sentido descono- cidos de antemano. La ec. (12.5) aplicada a este caso es
RA + W, + W, + RE = O (12.71)
't
.I 48 m Figura 12.1 1 b
Tomando componentes de esta ecuación en el siste- ma de coordenadas mostrado en la figura 12.11 b se encuentra
componente x: - RAx = O (1 2.72) componente y: RAY - W , - W , + RF = O (12.73)
La ec. (12.8) aplicada a nuestro caso, con respecto al punto A, es
Tw, + 7 1 ~ + T R E = 0 (1 2 74)
Las direcciones de estas tres torcas son perpendicula- res al plano de la armadura (o sea, de la página) Los sentidos de las torcas de W, y de W, son hacia adentro de la página, mientras que el sentido de l a torca de RE es hacia afuera de la página. Por tanto, to- mando la componente Z de la ec (12.74) se encuentra que
- W , X 12 m - W, X 36 m + RE- X 48 m = O
De esta ecuación despejamos RE Pasamos los suman- dos que contienen !", y W2 al otro miembro (pasan con signo positivo) y sustituimos valores numéricos
R,, X 48 m = 285 kg X 1 2 m + 73 kg X 36 nl
= 6 O48 k g X m
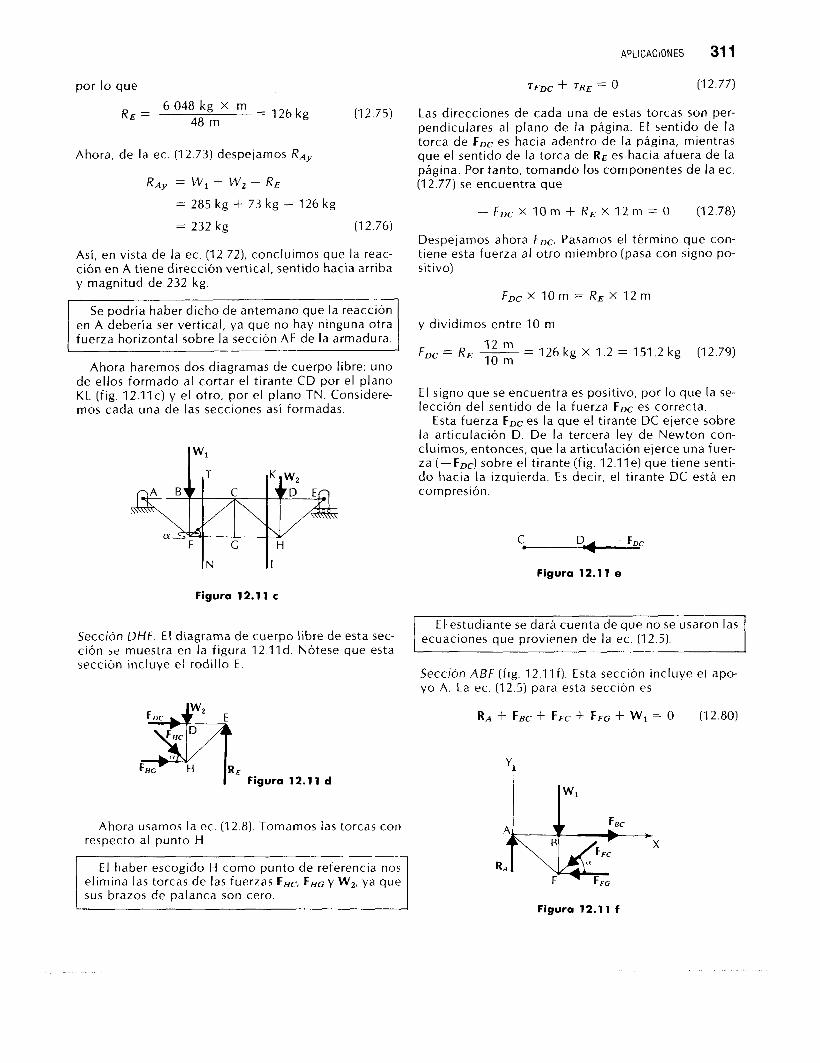
APLICACIONES 31 1
por lo que TFDC f TRE 0 (1 2.77)
(12.75) Las direcciones de cada una de estas torcas son per- pendiculares al plano de la página. E l sentido de la torca de F D c es hacia adentro de la página, mientras
Ahora, de la ec. (12.73) despejamos R A ~ que el sentido de la torca de R E es hacia afuera de la página. Por tanto, tomando los componentes de la ec.
RE = kg x m = 126kg 48 m
RAY = w, + w, - RE (12.77) se encuentra que
= 285 kg + 73 kg - 126 kg
= 232 kg (1 2.76)
Así, en vista de la ec. (12.72), concluimos que la reac- ción en A tiene dirección vertical, sentido hacia arriba y magnitud de 232 kg.
Se podría haber dicho de antemano que la reacción en A debería ser vertical, ya que no hay ninguna otra fuerza horizontal sobre la sección AE de la armadura.
Ahora haremos dos diagramas de cuerpo libre: uno de ellos formado al cortar el tirante CD por el plano K L ( f ig . 12.11~) y el otro, por el plano TN. Considere- mos cada una de las secciones así formadas.
I_____
I w1
Despejamos ahora FDc. Pasamos el término que con- tiene esta fuerza al otro miembro (pasa con signo po- sitivo)
y dividimos entre 10 m
F D c = RE ___ l2 m - - 126 kg X 1.2 = 151.2 kg (12.79) 10 m
E l signo que se encuentra es positivo, por lo que la se- lección del sentido de la fuerza FDC es correcta.
Esta fuerza FDc es la que el t irante DC ejerce sobre la articulación D. De la tercera ley de Newton con- cluimos, entonces, que la articulación ejerce una fuer- za ( - F D c ) sobre el tirante (fig. 12.11e) que tiene senti- do hacia la izquierda. Es decir, el tirante DC está en compresión.
Figura 12.1 1 e
Figura 12.1 1 E
Elestudiante se dará cuenta de que no se usaron las Sección DHE. E l diagrama de cuerpo libre de esta sec- ción se muestra en la figura 12.11d. Nótese aue esta .
ecuaciones que provienen de la ec, (12.5). Y
sección incluye el rodil lo E .
Ahora usamos la ec. (12.8). Tomamos las torcas con respecto al punto H
E l haber escogido H como punto de referencia nos elimina las torcas de las fuerzas FHc, FHG y W,, ya que sus brazos de palanca son cero.
Sección ABF (fig. 12.11fj. Esta sección incluye el apo- yo A. La ec. (12.5) para esta sección es
Ra + F B c + FFC + F8-c + W, = O (12.80)
Figura 12.1 1 f
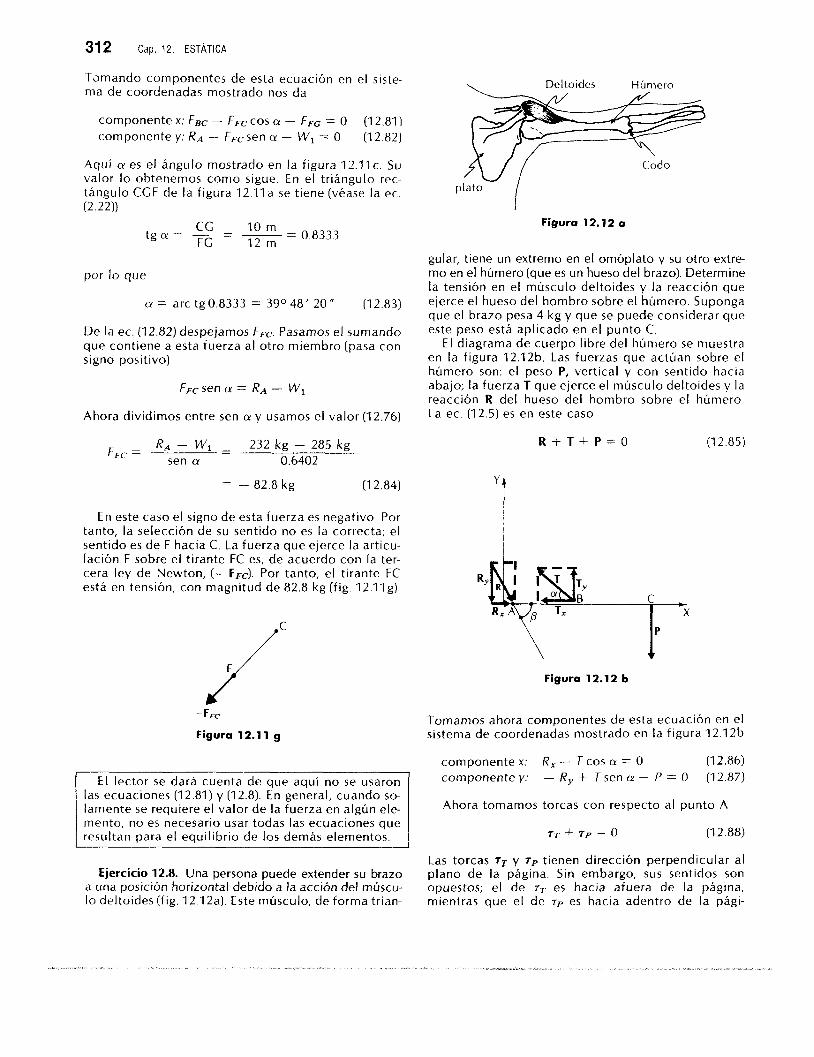
312 Cap. 12. ESTÁTICA
Tamando componentes de esta ecuación en el siste- ma de coordenadas mostrado nos da
Deltoides Húmero
componente x: FBc - FFC cos (Y - FFG = O (1 2.81 I componente y: RA - FFcsen EY - W, = O (12.82)
Aquí a es el ángulo mostrado en la figura 12.11 c. Su valor lo obtenemos como sigue. En el triángulo rec- tángulo CCF de la f igura 12.11a se tiene (véase la ec. (2.22))
plato
\ Codo
cc - 10 m t g a = ” “ - 0.8333 Figura 12.12 a
FC 1 2 m gular, tiene un extremo en el omóplato y su otro extre-
por lo que mo en el húmero (que es un hueso del brazo). Determine la tensión en el músculo deltoides y la reacción que
= arc tg 0.8333 = 390 48’ 20” (12,831 ejerce el hueso del hombro sobre el húmero. Suponga que el brazo pesa 4 kg y que se puede considerar que
De la ec. (12.82) despejamos FFC. Pasamos el sumando este Peso está aplicado en el Punto c. que contiene a esta fuerza al otro miembro (pasa con E l diagrama de cuerpo libre del húmero se muestra signo positivo) en la figura 12.12b. Las fuerzas que actúan sobre el
húmero son: el peso P, vertical y con sentido hacia FFcsen a = RA - W1 abajo; la fuerza T que ejerce el músculo deltoides y la
reacción R del hueso del hombro sobre el húmero. Ahora dividimos entre sen (Y y usamos el valor (12.76) La ec. (12.5) es en este cas0
RA - w1 - 232 k g - 285 k g FFC = -
sen (Y 0.6402
= - 82.8 kg (1 2.84)
R + T + P = O (I 2.85)
En este caso el signo de esta fuerza es negativo Por tanto, la selección de su sentido no es la correcta; el sentido es de F hacia C. La fuerza que ejerce la articu- lación F sobre el tirante FC es, de acuerdo con la ter- cera ley de Newton, (-FFc). Por tanto, el tirante FC está en tensión, con magnitud de 82.8 kg (f ig. 12. l lg) .
C X
P
+
- F m
Figura 12.1 1 g
Figura 12.12 b
Tomamos ahora componentes de esta ecuación en el sistema de coordenadas mostrado en la figura 12.1 2b
componente x: R, - T COS (Y = O (1 2.86) componente y: - R, + Tsen a - P = O (12.87)
las ecuaciones (12.81) y (12.8). En general, cuando so- lamente se requiere el valor de la fuerza en algún ele- Ahora tomamos torcas con respecto al punto A mento, no es necesario usar todas las ecuaciones que resultan para el equilibrio de los demás elementos. 73- + 7 p = o (12.88)
Las torcas 7T y 7p tienen dirección perpendicular al Ejercicio 12.8. Una persona puede extender su brazo plano de la página. Sin embargo, sus sentidos son
a una posición horizontal debido a la acción del múscu- opuestos; el de 77. es hacia afuera de la página, lo deltoides(fig. 12.12a). Este músculo, de forma trian- mientras que el de 7 p es hacia adentro de la pági-
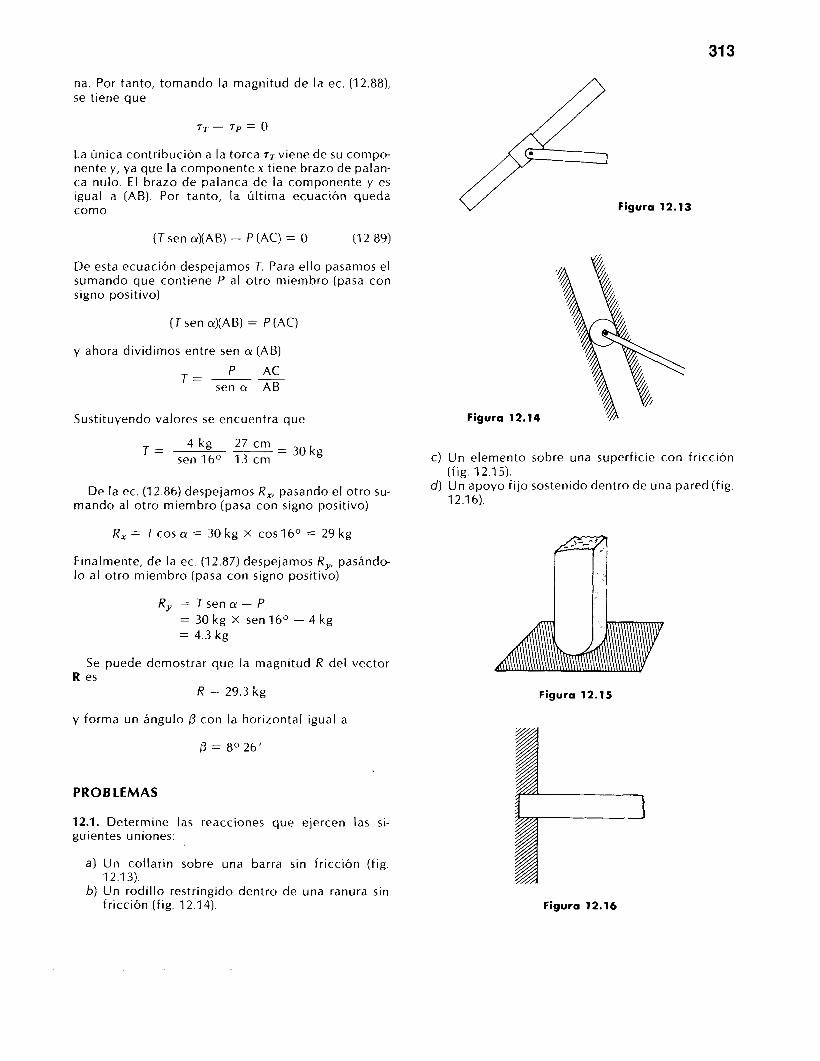
31 3
na. Por tanto, tomando la magnitud de la ec. [12.88), se tiene que
7T - 7 p = o La única contr ibución a la torca rTviene de su compo- nente y, ya que la componente x tiene brazo de palan- ca nulo. E l brazo de palanca de la componente y es igual a (AB). Por tanto, la últirna ecuación queda como
(T sen a)(AB) - P (AC) = O (1 2.89)
De esta ecuación despejamos T. Para ello pasamos el sumando que contiene P al otro miembro (pasa con signo positivo)
(T sen &AB) = P (AC)
y ahora dividimos entre sen CY (AB) P AC
sen (Y AB T = ___-
Sustituyendo valores se encuentra que
T = 4 kg 27 cm sen 16O 1 3 cm " - 30 kg
De la ec. (12.86) despejamos R,, pasando el otro su- mando al otro miembro (pasa con signo positivo)
R,= T c o s ( ~ = 3 0 k g X c o s 1 6 " = 2 9 k g
Finalmente, de la ec. (12.87) despejamos R,, pasándo- lo al otro miembro (pasa con signo positivo)
R, = T s e n a - P = 30 kg X sen16O - 4 kg = 4.3 kg
Se puede demostrar que la magnitud R del vector R es
R = 29.3 kg
y forma un ángulo 0 con la horizontal igual a
P = 8O 26'
PROBLEMAS
12.1. Determine las reacciones que ejercen las si- guientes uniones:
a) Un col larín sobre una barra sin fricción (fig.
b) Un rodillo restringido dentro de una ranura sin 12.1 3).
fricción (fig. 12.14).
I
Figura 12.13
c) Un elemento sobre una superficie con fricción
d) Un apoyo fijo sostenido dentro de una pared (fig. (fig. 12.1 5 ) .
12.1 6).
Figura 12.15
Figura 12.16
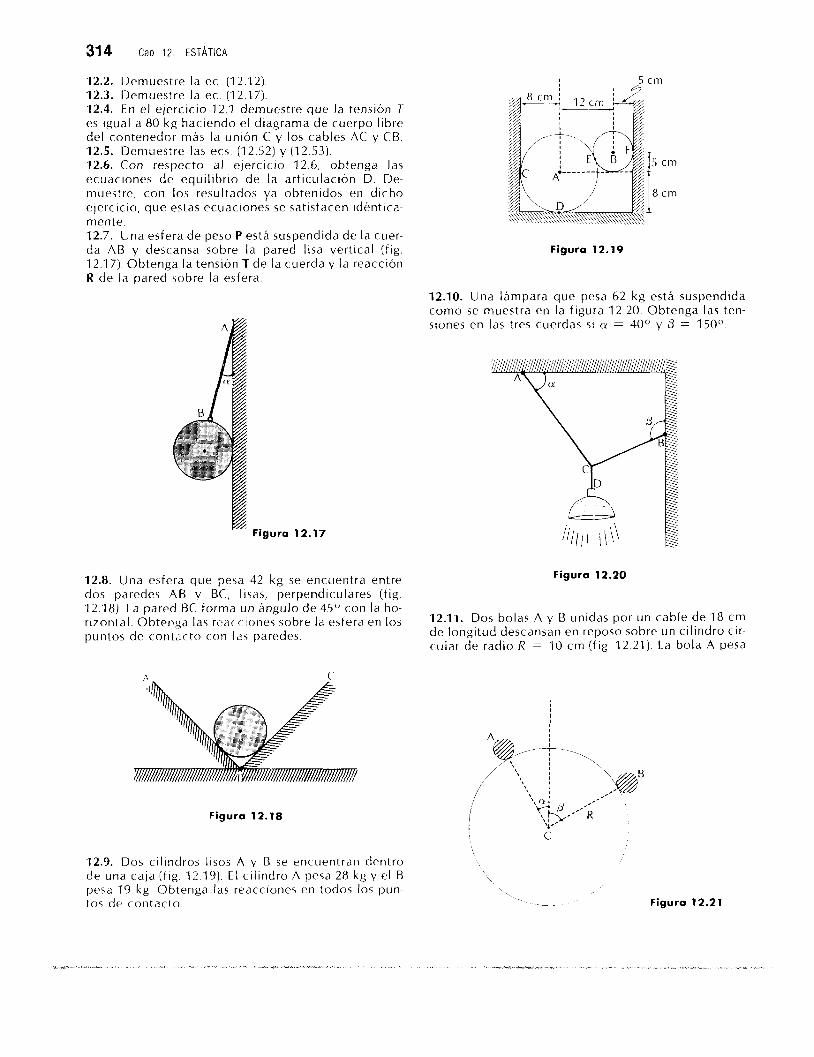
314 Cap 12. ESTÁTICA
12.2. Demuestre la ec. (12.12) 12.3. Demuestre la ec. (12.17). 12.4. En el ejercicio 12.1 demuestre que la tensión T es igual a 80 kg haciendo el diagrama de cuerpo libre del contenedor más la unión C y los cables AC y CB. 12.5. Demuestre las ecs. (12.52) y (12.53). 12.6. Con respecto al ejercicio 12 6, obtenga las ecuaciones de equilibrio de la articulación D. De- muestre, con los resultados ya obtenidos en dicho ejercicio, que estas ecuaciones se satisfacen idéntica- mente. 12.7. Una esfera de peso P está suspendida de la cuer- da AB y descansa sobre la pared lisa vertical (fig. 12.1 7 ) . Obtenga la tensión T de la cuerda y la reacción R de la pared sobre la esfera.
Figura 12.17
1
cm
cm
Figura 12.19
12.10. Una lámpara que pesa 62 kg está suspendida como se muestra en la figura 12.20. Obtenga las ten- siones en las tres cuerdas s i a = 40" y /3 = 150".
12.8. Una esfera que pesa 42 kg se encuentra entre dos paredes AB y BC, lisas, perpendiculares (fig. 12.18) La pared BC forma un ángulo de 45" con la ho- rizontal. Obtengd l d s rea( c iones sobre la esfera en los puntos de cont'lrto con la, paredes.
Figura 12.20
12.1-1. Dos bolas A y B unidas pot un cable de 18 cm de longitud descansan en reposo sobre un cilindro cir- cular de radio R = 10 cm (fig. 12.21). La bola A pesa
Figura 12.18
12.9. Dos cilindros lisos A y B se encuentran dentro de una caja (fig. 12.19). E l ci l indro A pesa 28 kg y el B pesa 19 kg. Obtenga las reacciones en todos los pun- to5 de contacto ,-\
..~ ~ Figura 12.21
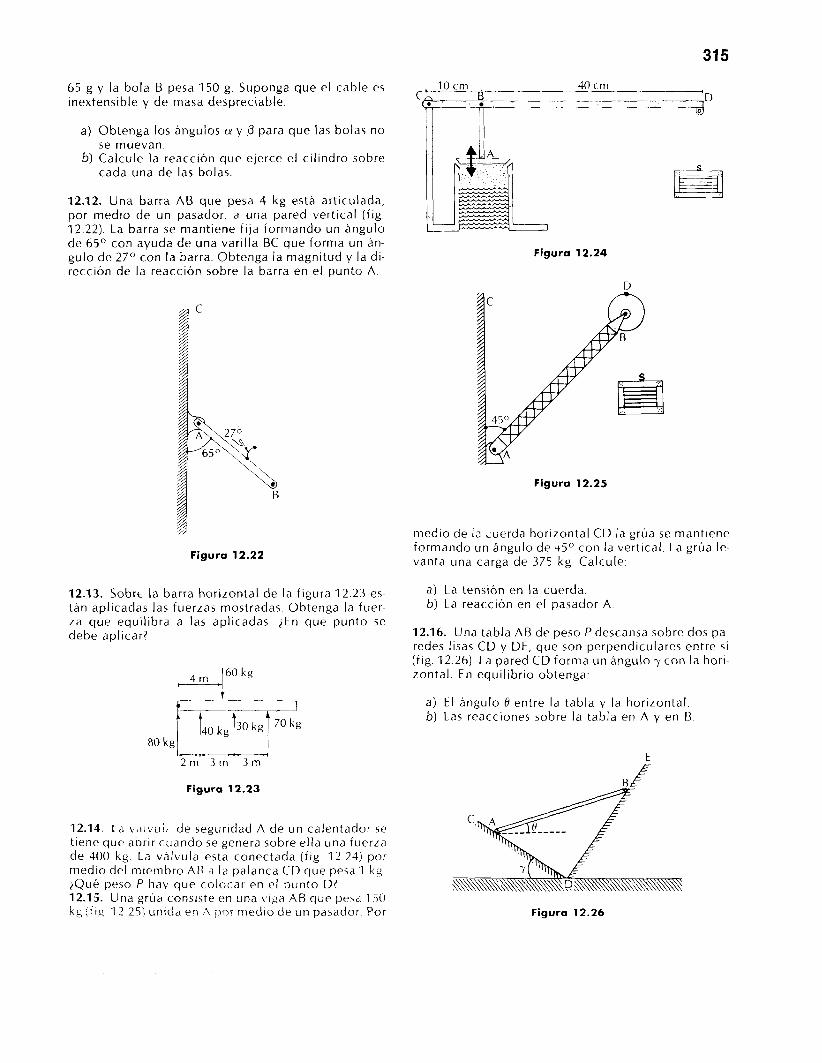
31 5
65 g y la bola B pesa 150 g. Suponga que el cable es 10cm . 40 cm inextensible y de masa despreciable. C ' 6
"
0
7 a) Obtenga los ángulos o( y f l para que las bolas no
b) Calcule la reacción que ejerce el cilindro sobre se muevan.
cada una de las bolas.
12.12. Una barra AB que pesa 4 kg está articulada, por medio de un pasador, a una pared vertical (fig. 12.22). La barra se mantiene fija formando un ángulo de 65O con ayuda de una varilla BC que forma un án- gulo de 2 7 O con la barra. Obtenga la magnitud y la di- rección de la reacción sobre la barra en el punto A .
Figura 12.22
12.13. Sobrt la barra horizontal de la figura 12.23 es- tán aplicadas las fuerzas mostradas. Obtenga la fuer- L d que equilibra a las aplicadas. iEn qué punto se debe aplicar?
Figura 12.23
12.14, La \ ~ ~ i l ~ d c i ~ de seguridad A de un calentador se tiene que abrir cuando se genera sobre ella una fuerza de 400 kg. La válvula esta conectada (fig. 12.24) por medio del miembro A B a la palanca C D que pesa 1 k g >Qué peso P hay que colocar en el punto D! 12.15. Una grúa consiste en una viga A B que pesa 150 kg : i ! g 1 2 25) unida en -4 \ )or medio de un pasador Por
Figura 12.24
u
Figura 12.25
medio de ¡a cuerda horizontal CD la grúa se mantiene formando un ángulo de 4 5 O con la vertical. La grúa le- vanta una carga de 375 kg. Calcule:
a) La tensión en la cuerda. b) La reacción en el pasador A
12.16. Una tabla AB de peso P descansa sobre dos pa- redes lisas CD y DE, que son perpendiculares entre s í (fig. 12.26) 1.a pared CD forma un ángulo y con la hori- zontal. En equilibrio obtenga:
a) E l ángulo 19 entre la tabla y la horizontal. b) Las reacciones sobre la tabla en A y en B
E
Figura 12.26
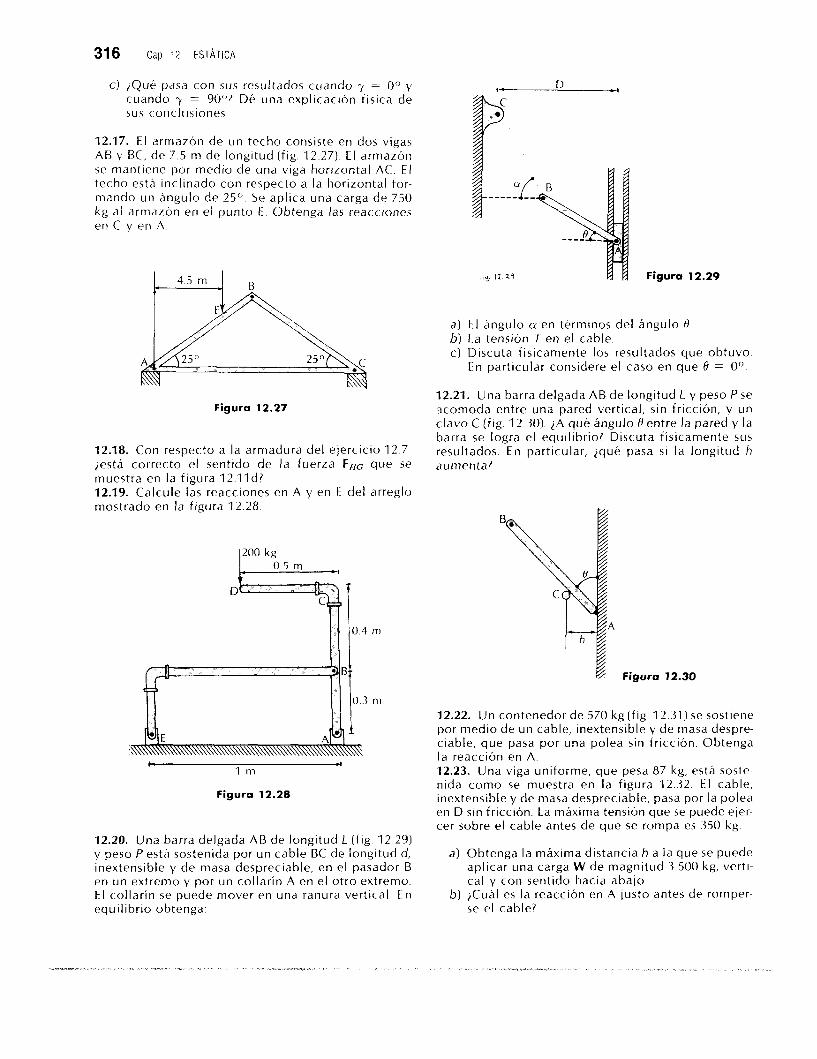
31 6 Cap 1 2 . ESTÁTICA
c) jQu+ pasa con sus resultados cuando y = 0" y cuando y = 90°! DP una explicación física de sus conclusiones
12.17. E l armazón de un techo consiste en dos vigas A B y BC, de 7.5 m de longitud (fig. 12.27). E l armazón se mantiene por medio de una viga horizontal AC. E l techo está inclinado con respecto a la horizontal for- mando un ángulo de 25O. St. aplica una carga de 750 kg al armazón en el punto E Obtenga las reacciones en C v en A .
a) E l ángulo CY en tPrminos del ángulo B. b) La tensión 7 en el cable. c) Discuta físicamente los resultados que obtuvo
En particular considere el caso en que 0 = O O .
Figura 12.27
12.18. Con respecto a la armadura del ejercicio 12.7 jestá correcto el sentido de la fuerza FHG que se muestra en la figura I 2 . I I d ? 12.19. Calcule las reacciones en A y en E del arreglo mostrado en la figura 12.28.
0.3 m
. - I m
_.
Figura 12.28
12.20. Una barra delgada A B de longitud L (flg. 12 29) y peso P está sostenida por un cable BC de longitud d, inextensible y de masa despreciable, en el pasador B en un extremo y por un collarín A en el otro extremo. E l collarín se puede mover en una ranura vertical. En equilibrio obtenga:
I t D CI
Figura 12.29
12.21. Una barra delgada AB de longitud L y peso P se 3comoda entre una pared vertical, sin fricción, y un clavo C (fig. 12.30). i A qué ángulo 0 entre la pared y la barra se logra el equilibrio? Discuta físicamente s u s resultados. En part icular, iqué pasa s i la longitud h aumenta?
12.22. Un contenedor de S70 kg (fig. 12.31) se sostiene por medio de un cable, inextensible y de masa despre- ciable, que pasa por una polea sin fricción. Obtenga la reacción en A . 12.23. Una viga uniforme, que pesa 87 kg, está soste- nida como se muestra en la figura 12.32. E l cable, inextensible y de masa despreciable, pasa por la polea en D sin fricción. La máxima tensión que se puede ejer- cer sobre el cable antes de que se rompa es 350 kg.
a) Obtenga la máxima distancia h a la que se puede aplicar una carga W de magnitud 3 500 kg, verti- cal y con sentido hacia abajo.
b ) >Cuál es la reacción en A justo antes de romper- se el cable?
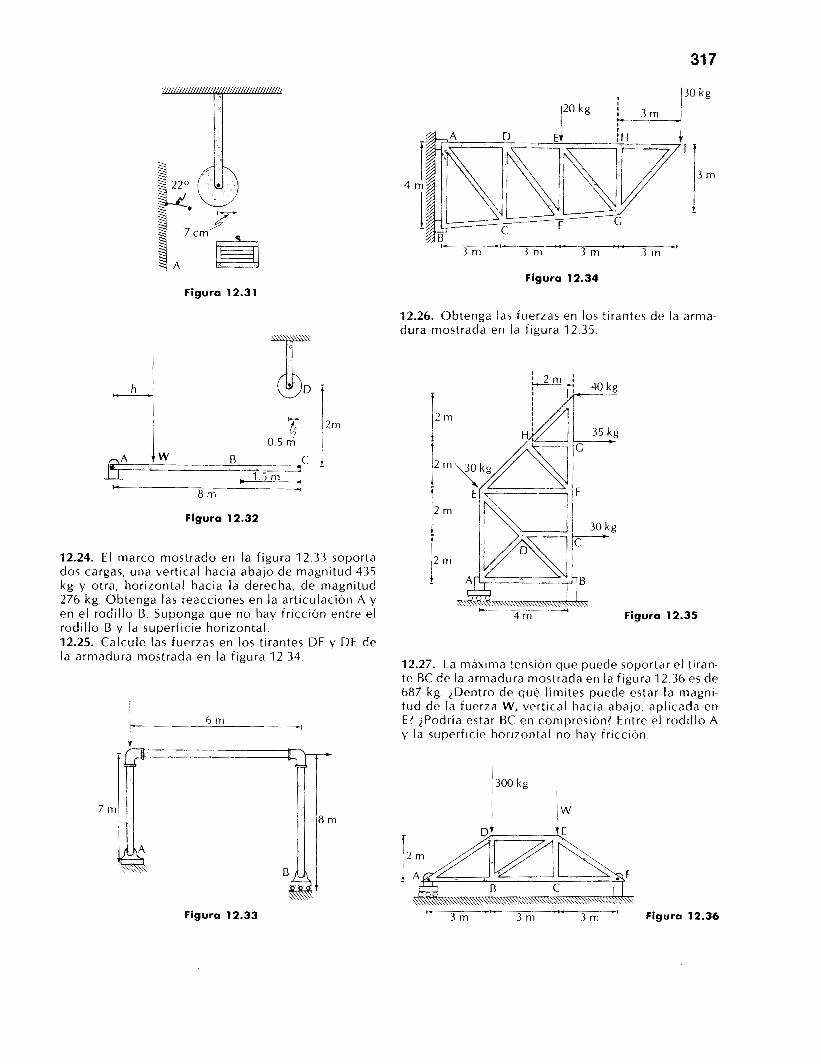
31 7
Figura 12.31
Figura 12.32
12.24. E l marco mostrado en la figura 12.33 soporta dos cargas, una vertical hacia abajo de magnitud 435 kg y otra, horizontal hacia la derecha, de magnitud 276 kg. Obtenga las reacciones en la articulación A y en el rodillo B. Suponga que no hay fricción entre el rodillo B y la superficie horizontal, 12.25. Calcule las fuerzas en los tirantes DF y DE de la armadura mostrada en la figura 12.34.
B
Figura 12.33
Figura 12.34
12.26. Obtenga las fuerzas en los tirantes de la arma- dura mostrada en la figura 12.35
i f
!
I /
35 kg -
30 kg - I
4 r n I
Figura 12.35
12.27. La máxima tensión que puede soportar el tiran- te BC de la armadura mostrada en la figura 12.36 es de 687 kg iDentro de qué límites puede estar la magni- tud de la fuerza W, vertical hacia abajo, aplicada en E ? iPodría estar BC en compresión? Entre el rodillo A y la superficie horizontal no hay fricción.
300 kg
l b
~~~ B C
\
' 3 r n ' 3 r n ' 3 m " Figura 12.36
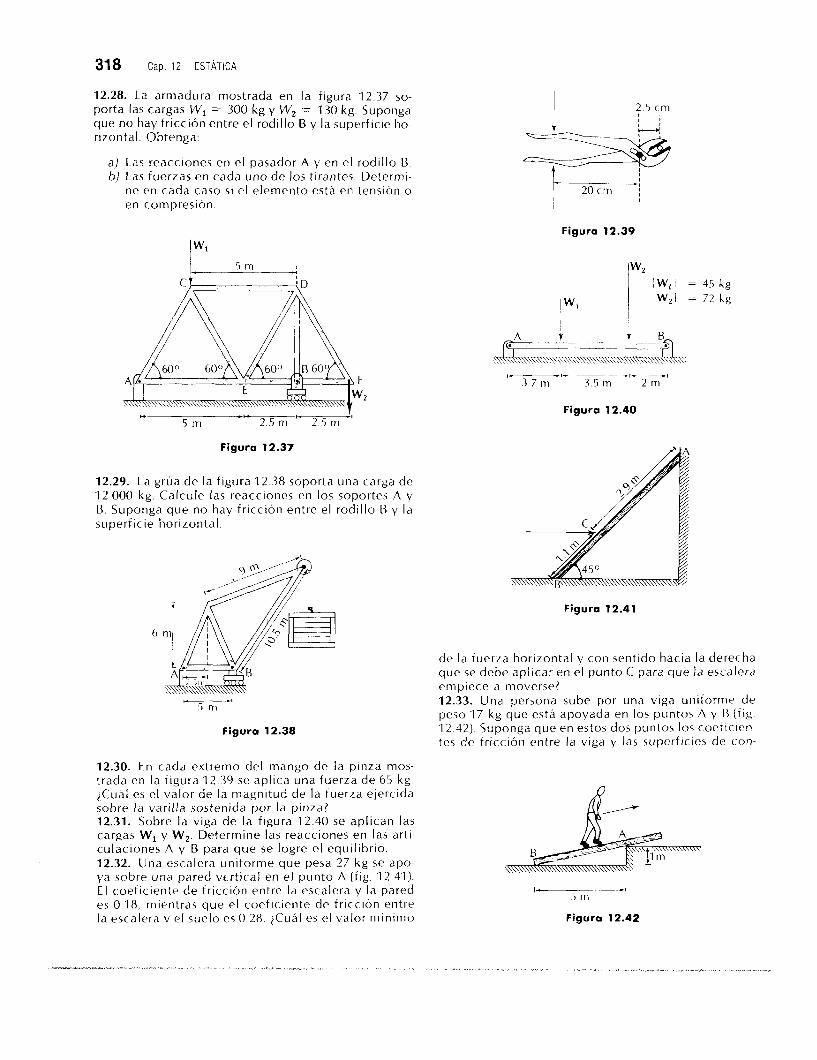
31 8 Cap 1 2 ESTÁTICA
12.28. La armadura mostrada en la figura 12.37 so- porta las cargas w, = 300 kg y w, = 130 kg. Suponga que no hay fricción entre el rodillo B y la superficie ho- rizontal. Obtenga:
a] Las reacciones en el pasador A y en el rodillo B. b] l a s fuerzas en cada uno de los tirantes. Determi-
ne en cada caso s i el elemento está en tensión o en compresión.
c - 5 m 2.5 m 2 5 m ,'I
Figura 12.37
12.29. La grúa de la figura 12.38 soporta una carga de 12 000 kg. Calcule las reacciones en los soportes A y B. Suponga que no hay fricción entre el rodillo H y la superficie horizontal.
Figura 12.38
12.30. En cada extremo del mango de la pinza mos- trada en la figura 12.39 se aplica una fuerza de 65 kg iCuá1 es el valor de la magnitud de la fuerza ejercida sobre la varilla sostenida por la pinza? 12.31. Sobre la viga de la figura 12.40 se aplican las cargas W, y W,. Determine las reacciones en las arti- culaciones A y B para que se logre el equilibrio. 12.32. Una escalera uniforme que pesa 27 kg se apo- ya sobre una pared vtrt ical en el punto A (fig. 12.41). E l coeficiente de fricción entre la escalera y la pared es 0.18, mientras que el coeficiente de fricción entre la escalera v el suelo es 0 . 2 8 . 2Cuál es el valor mínimo
I 2.5 cm
Figura 12.39
Figura 12.40
Figura 12.4 1
de l a fuerra horizontal y con sentido hacia la derecha que se debe aplicar en el punto C para que la escalera empiece a moverse! 12.33. Una persona sube por una viga uniforme de peso 17 kg que está apoyada en los puntos A y B (fig. 12.42) Suponga que en estos dos puntos los coeficlen- tes de fricción entre la viga y las superficies de con-
D
I- 5 m
-1
Figura 12.42
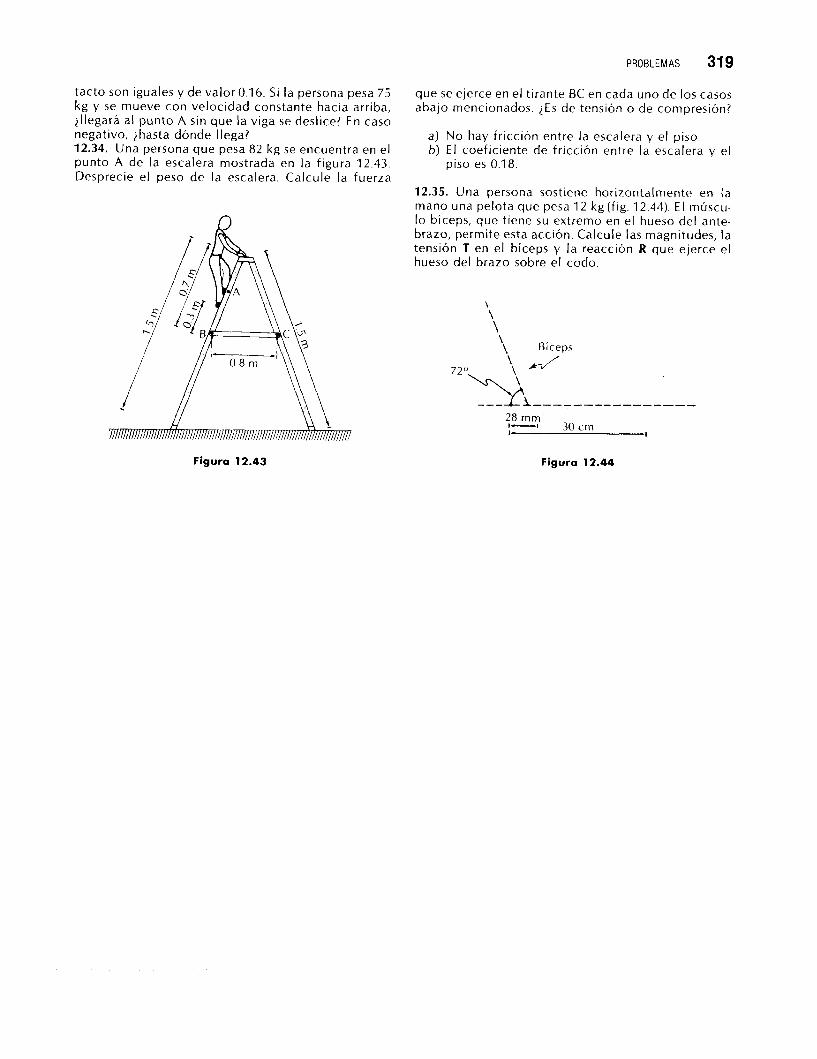
PROBLEMAS 31 9 tacto son iguales y de valor 0.16. S i la persona pesa 75 que se ejerce en el tirante BC en cada uno de los casos kg y se mueve con velocidad constante hacia arriba, abajo mencionados. iEs de tensión o de compresión? il legará al punto A sin que la viga se deslice? En caso negativo, ihasta dónde llega? a) No hay fricción entre la escalera y el piso. 12.34. Una persona que pesa 82 kg se encuentra en el b) E l coeficiente de fricción entre la escalera y el punto A de la escalera mostrada en la figura 12.43. piso es 0.18. Desprecie el peso de la escalera. Calcule la fuerza
12.35. Una persona sostiene horizontalmente en la mano una pelota que pesa 12 kg (fig. 12.44). E l múscu- lo bíceps, que tiene su extremo en el hueso del ante- brazo, permite esta acción. Calcule las magnitudes, la tensión T en el bíceps y la reacción R que ejerce el hueso del brazo sobre el codo.
\ \ \ '\ Bíceps
28 rnrn 30 cm 4
Figura 12.43 Figura 12.44
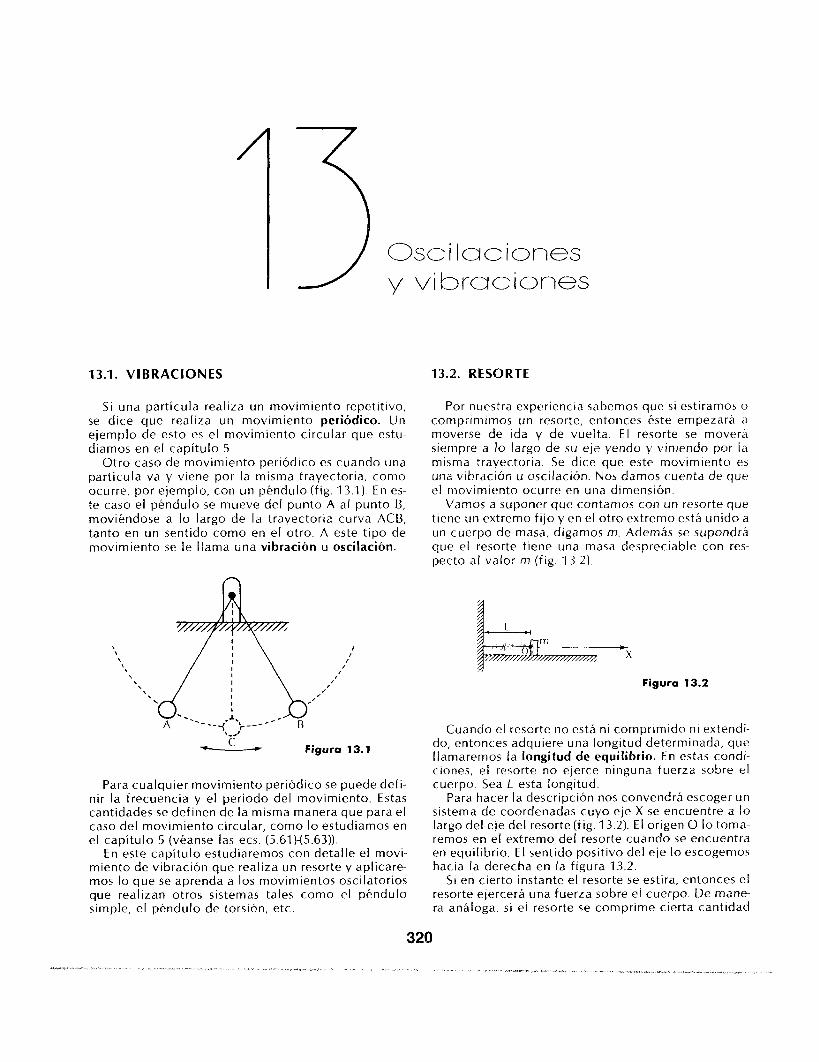
O s c i l a c i o n e s y v i b r a c i o n e s
13.1. VIBRACIONES 13.2. RESORTE
Si una partícula realiza un movimiento repetitivo, se dice que realiza un movimiento periódico. Un ejemplo de esto es el movimiento circular que estu- diamos en el capítulo 5.
Ot ro caso de movimiento periódico es cuando una partícula va y viene por la misma trayectoria, como ocurre, por ejemplo, con un péndulo (fig. 13.1). En es- te caso el péndulo se mueve del punto A al punto B, moviéndose a lo largo de la trayectoria curva ACB, tanto en un sentido como en el otro. A este t ipo de movimiento se le l lama una vibración u oscilación.
Por nuestra experiencia sabemos que s i estiramos o comprimimos un resorte, entonces éste empezará a moverse de ida y de vuelta. E l resorte se mover& siempre a lo largo de su eje yendo y viniendo por la misma trayectoria. Se dice que este movimiento es una vibración u oscilación. Nos damos cuenta de q u e el movimiento ocurre en una dimensión.
Vamos a suponer que contamos con un resorte que t iene un extremo f i jo y en el otro extremo está unido a un cuerpo de masa, digamos m. Además se supondrá que el resorte tiene una masa despreciable con res- pecto at valor m (fig. 13.2).
\ \ \ , ,
\
I I
I
I
I ,
. - <"'
- C Figura 13.1
Para cualquier movimiento periódico se puede defi- nir la frecuencia y el periodo del movimiento. Estas cantidades se definen de la misma manera que para el caso del movimiento circular, como lo estudiamos en el capítulo 5 (véanse las ecs. (5.61)-(5.63)).
En este capítulo estudiaremos con detalle el movi- miento de vibración que realiza un resorte y aplicare- mos lo que se aprenda a los movimientos oscilatorios que realizan otros sistemas tales como el péndulo simple, el péndulo de torsión, etc.
- X
Figura 13.2
Cuando el resorte no está ni comprimido ni extendi- do, entonces adquiere una longitud determinada, que llamaremos la longitud de equilibrio. En estas condi- ciones, el resorte no ejerce ninguna fuerza sobre el cuerpo. Sea L esta longitud.
Para hacer la descripción nos convendrá escoger un sistema de coordenadas cuyo eje X se encuentre a lo largo del eje del resorte (fig. 13.2). E l origen O lo toma- remos en el extremo del resorte cuando se encuentra en equilibrio. E l sentido positivo del eje lo escogemos hacia la derecha en la figura 13.2.
S i en cierto instante el resorte se estira, entonces el resorte ejercerá una fuerza sobre e¡ cuerpo. De mane- ra análoga, s i el resorte se comprime cierta cantidad
320
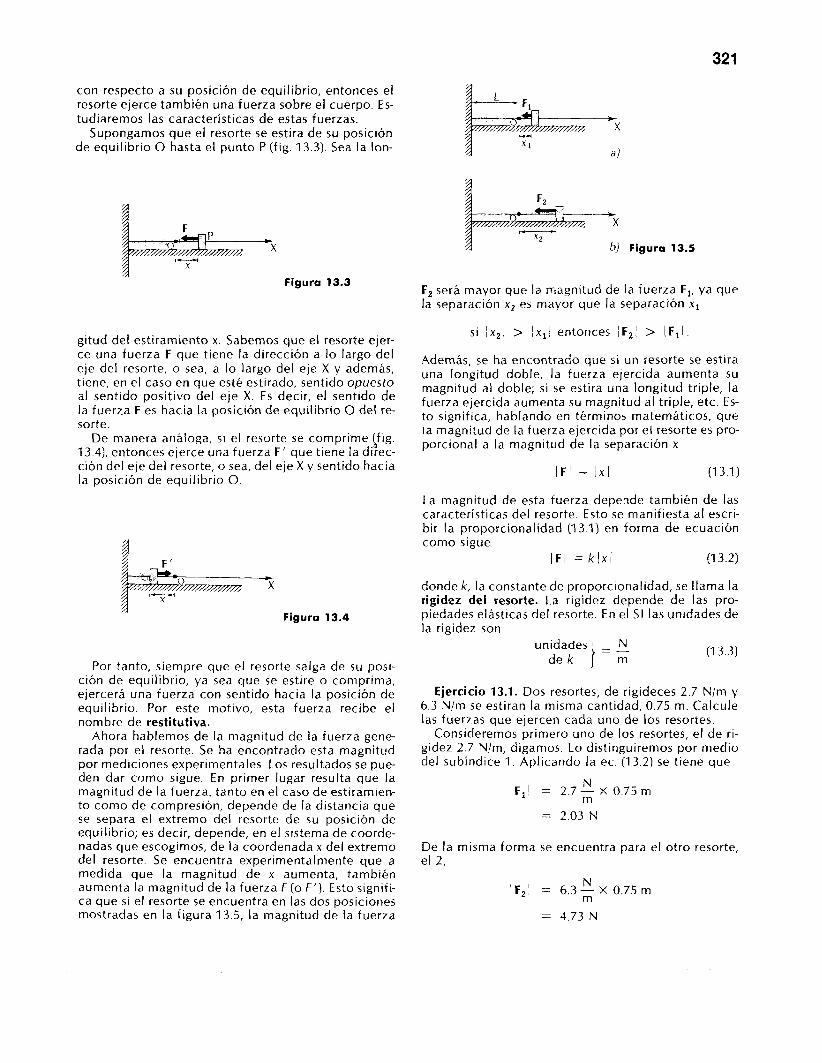
321
con respecto a su posición de equilibrio, entonces el resorte ejerce también una fuerza sobre el cuerpo. Es- tudiaremos las características de estas fuerzas.
Supongamos que el resorte se estira de su posición de equil ibrio O hasta el punto P (fig. 13.3). Sea la lon-
L
X
Figura 13.3
gitud del estiramiento x. Sabemos que el resorte ejer- ce una fuerza F que tiene la dirección a lo largo del eje del resorte, o sea, a lo largo del eje X y además, tiene, en el caso en que esté estirado, sentido opuesto al sentido positivo del eje X. E s decir, el sentido de la fuerza F es hacia la posición de equil ibrio O del re- sorte.
De manera análoga, st el resorte se comprime if ig. 13.4), entonces ejerce una fuerza F ’ que tiene la direc- ción del eje del resorte, o sea, del eje X y sentido hacia la posición de equil ibrio O.
3 Figura 13.4
Por tanto, siempre que el resorte salga de su posi- ción de equilibrio, ya sea que se estire o comprima, ejercerá una fuerza con sentido hacia la posición de equilibrio. Por este motivo, esta fuerza recibe el nombre de restitutiva.
Ahora hablemos de la magnitud de la fuerza gene- rada por el resorte. Se ha encontrado esta magnitud por mediciones experimentales. Los resultados se pue- den dar como sigue. En primer lugar resulta que la magnitud de la fuerza, tanto en el caso de estiramien- to como de compresión, depende de la distancia que se separa el extremo del resorte de su posición de equilibrio; es decir, depende, en el sistema de coorde- nadas que escogimos, de la coordenada x del extremo del resorte. Se encuentra experimentalmente que a medida que la magnitud de x aumenta, también aumenta la magnitud de la fuerza F(o F ’ ) . Esto signifi- ca que s i el resorte se encuentra en las dos posiciones mostradas en la figura 13.5, la magnitud de la fuerza
F, será
0) Figura 13.5
mayor que la magnitud de la fuerza F,, ya que la separación xz es mayor que la separación x1
s i l x z i > ] x 1 / entonces !F21 > ! F l ! .
Además, se ha encontrado que s i u n resorte se estira una longitud doble, la fuerza ejercida aumenta su magnitud al doble; s i se estira una longitud triple, la fuerza ejercida aumenta su magnitud al triple, etc. Es- to significa, hablando en términos matemáticos, que la magnitud de la fuerza ejercida por el resorte es pro- porcional a la magnitud de la separación x
I F I - 1x1 (1 3.1)
La magnitud de esta fuerza depende también de las características del resorte. Esto se manifiesta al escri- bir la proporcionalidad (13.1) en forma de ecuación como sigue
I F ¡ = k l x l (1 3.2)
donde k, la constante de proporcionalidad, se l lama la rigidez del resorte. La rigidez depende de las pro- piedades elásticas del resorte. En el SI las untdades de la rigidez son
unidades I = 3 d e k 1 m
(1 3.3)
Ejercicio 13.1. Dos resortes, de rigideces 2.7 N/m y 6.3 Nim se estiran la misma cantidad, 0.75 m. Calcule las fuerzas que ejercen cada uno de los resortes.
Consideremos primero uno de los resortes, el de ri- gidez 2.7 Nim, digamos. Lo distinguiremos por medio del subíndice 1. Aplicando la ec. ( I 3.2) se tiene que
/ F , j = 2 . 7 E X 0.75m m = 2.03 N
De la misma forma se encuentra para el otro resorte, el 2,
= 4.73 N
Cap 13 OSCIIAC!ONES Y VIBRACIONES
P o r estos resultados nos damos cuenta de que, para las mismdS rndgniltjdes de estiramiento (0.75 m), el re-- sorte (;UP :lene mayor rigidez ejerce una fuerza ma- vor.
i < ~ ia f igura 13.6 se muestra la gráfica de la magni- t~ud de la fuerza ejercida por un resorte como función de la magnitud del estiramiento. Se podrá apreciar que l a gráfica es una línea recta hasta determinado valor del estiramiento. A la región entre O y A se le llama elástica. Esta corresponde a estiramientos que es t i n entre O y h. Si se continúa estirando el resorte más allá del valor I?, entonces deja de ser ei6stico. En este caso, a l soltar el resorte no regresa a si! posición de equilibrio. Soiamente consideraremo, resortes dentro del dominio clistico.
I o que se acaba de, exponer para el caso en que se estira crn resorte también e s válido pard el caso en que sc3 comprime el resorte. Tanto la gráfica de la figura 7 .'$ 6 corno la ec(l.3.2) son válidas en este caso. con el mismo valor cir la r ig idrr k
ra cierta longitud y se le comprime la misma longitud, las fuerzas ejercidas en ambos casos tienen las mis- mas magnitudes.
Todo io anteriormente expuesto acerca de las ca- racterísticas de la fuerza que ejerce un resorte se pue- de resumir por medio de la siguiente relación para la fuerza F ( x ) que ejerce cuando experimenta una sepa- ración x de su posición de equilibrio
F ( x ) = -kx. (I 3.4)
I Se ha indicado la fuerza F como función de x. 1 Aquí se supondrá que la cantidad F tiene signo en el
sistema de coordenadas escogido. Así, s i el resorte se estira, entonces x > O (véase la fig. 13.3), y en la ec. (13.4) vemos que F tiene entonces signo negativo; es decir tiene sentido opuesto al sentido positivo del eje X, como se muestra en la figura 13.3.
I La rigidez k del resorte es siempre una cantidad po- i sitiva.
5 1 el resorte se comprime, entonces x < O (véase íig. 13.4), y por la ec. (13.4) se ve que F tiene entonces signo positivo; es decir, tiene el mismo sentido que el eje X, tal como se muestra en la figura 13.4.
Por tanto, fa ec. (13.4) incluye toda la información que se encuentra experimentalmente acerca de la fuerza ejercida por un resorte, dentro de la región eI6st1ca. va sea que esté estirado o comprimido.
La expresión (13.4) para la fuerza F solamente de- pende de x. Además, la dirección de la fuerza siempre
I está a Io largo del eje del resorte, o sea, a lo largo del I eje X. Por tanto, se tiene una fuerza en una dimensión.
En este caso, a diferencia de los casos tratados an- teriormente en este texto, la fuerza ejercida depende de la posiclon. Recuérdese que, en los casos tratados en capítulos anteriores, la fuerza (o en su caso, la aceleración) dependía del tiempo o era constante.
Una vez conocida la fuerza que ejerce el resorte podemos encontrar, según lo aprendido en capítulos anteriores la trayectoria que sigue el cuerpo unido a él. Antes de hacerlo con todo rigor matemático, va- mos a entender físicamente el motivo por el cual osci- ia el resorte.
Supongamos que se estira e l resorte hasta una posi- ción como la que se muestra en la figura 13.7a y luego se suelta. En estas condiciones, el cuerpo experimenta una fuerza F con sentido hacia la izquierda (hacia la posición de equilibrio). Además, por la segunda ley de Newton (véase ec. (6.4)), el resorte ejerce una acelera-
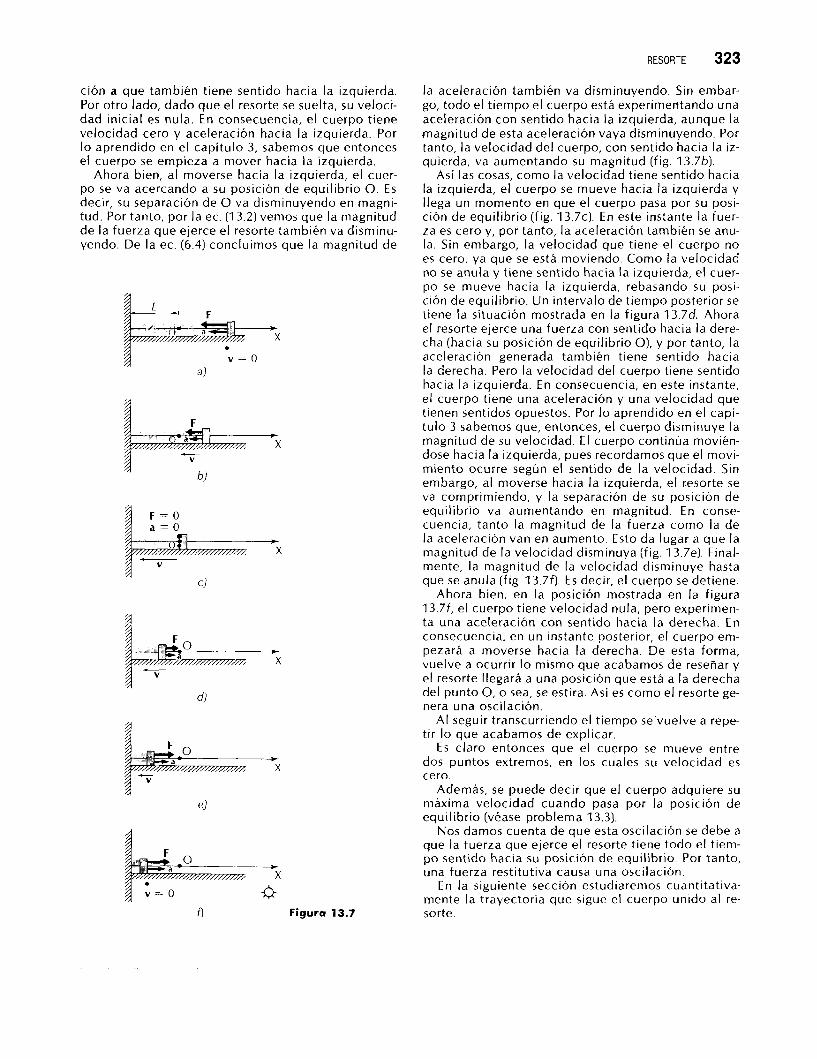
RESORTE 323
ción a que también tiene sentido hacia la izquierda. Por otro lado, dado que el resorte se suelta, su veloci- dad inicial es nula. En consecuencia, el cuerpo tiene velocidad cero y aceleración hacia la izquierda. Por lo aprendido en el capítulo 3, sabemos que entonces el cuerpo se empieza a mover hacia la izquierda.
Ahora bien, al moverse hacia la izquierda, el cuer- po se va acercando a su posición de equilibrio O. Es decir, su separación de O va disminuyendo en magni- tud. Por tanto, por la ec. ( I 3.2) vemos que la magnitud de la fuerza que ejerce el resorte también va disminu- yendo. De la ec. (6.4) concluimos que la magnitud de
v = o a )
f) Figura 13.7
la aceleración también va disminuyendo. Sin embar- go, todo el t iempo el cuerpo está experimentando una aceleración con sentido hacia la izquierda, aunque la magnitud de esta aceleración vaya disminuyendo. Por tanto, la velocidad del cuerpo, con sentido hacia la iz- quierda, va aumentando su magnitud (fig. 13.7b).
Así las cosas, como la velocidad t iene sentido hacia la izquierda, el cuerpo se mueve hacia la izquierda y llega un momento en que el cuerpo pasa por su posi- c ión de equi l ibr io ( f ig. 13.7~). En este instante la fuer- za es cero y, por tanto, la aceleración también se anu- la. Sin embargo, la velocidad que tiene el cuerpo no es cero, ya que se está moviendo. Como la velocidad no se anula y tiene sentido hacia la izquierda, el cuer- po se mueve hacia la izquierda, rebasando su posi- ción de equil ibrio. Un intervalo de t iempo posterior se tiene la situación mostrada en la figura 13.7d. Ahora el resorte ejerce una fuerza con sentido hacia la dere- cha (hacia su posición de equilibrio O), y por tanto, la aceleración generada también tiene sentido hacia la derecha. Pero la velocidad del cuerpo tiene sentido hacia la izquierda. En consecuencia, en este instante, el cuerpo tiene una aceleración y una velocidad que tienen sentidos opuestos. Por lo aprendido en el capí- tulo 3 sabemos que, entonces, el cuerpo disminuye la magnitud de su velocidad. E l cuerpo continúa movién- dose hacia la izquierda, pues recordamos que el movi- miento ocurre según el sentido de la velocidad. Sin embargo, al moverse hacia la izquierda, el resorte se va comprimiendo, y la separación de su posición de equil ibrio va aumentando en magnitud. En conse- cuencia, tanto la magnitud de la fuerza como la de la aceleración van en aumento. Esto da lugar a que la magnitud de la velocidad disminuya (fig. 13.7e). Final- mente, la magnitud de la velocidad disminuye hasta que se anula (fig. 13.7f). Es decir, el cuerpo se detiene.
Ahora bien, en la posición mostrada en la figura 13.7f, el cuerpo tiene velocidad nula, pero experimen- ta una aceleración con sentido hacia la derecha. En consecuencia, en un instante nosterior, el cuerpo em- pezará a moverse hacia la derecha. De esta forma, vuelve a ocurrir lo mismo que acabamos de reseñar y el resorte llegará a una posición que está a la derecha del punto O, o sea, se estira. Así es como el resorte ge- nera una oscilación.
AI seguir transcurriendo el tiempo se'vuelve a repe- tir lo que acabamos de explicar.
E S claro entonces que el cuerpo se mueve entre dos puntos extremos, en los cuales su velocidad es cero.
Además, se puede decir que el cuerpo adquiere su máxima velocidad cuando pasa por la posición de equil ibrio (véase problema 13.3).
Nos damos cuenta de que esta oscilación se debe a que la fuerza que ejerce el resorte tiene todo el tiem- po sentido hacia su posición de equilibrio. Por tanto, una fuerza restitutiva causa una oscilación.
En la siguiente sección estudiaremos cuantitativa- mente la trayectoria que sigue el cuerpo unido al re- sorte.
324 13.3. RESORTE. TRAYECTORIA siendo A, B y u cantidades constantes. Ahora veremos
bajo qué condiciones, la expresión (13.10) es solución
m unido al resorte bajo la de la fuerza (13.8). Primero calcularemos la segunda derivada de
ec. (6.4) y (3.21) así como las ecs. (3.25) y (3.35) para las deriva-
Para encontrar la trayectoria que sigue el cuerpo de de la ec. (1 3.8). Para ello sustituimos (1 3.10) en la ec.
( I 3,4), usaremos la segunda ley de Newton dada por la x(t) con respecto a t. Para el lo usaremos las ecs. (3.20)
das de las funciones seno y coseno: F(x) = " k x = ma (13.5)
En seguida usamos la ec. (3.32) para obtener la acele- dx ración a que experimenta el cuerpo por la acción del d t resorte
Primera derivada
" - - " A u sen ( u t ) + Bu cos (u t ) (13.11)
d2x a = - d t2
Ahora tomamos la derivada de esta expresión con (13'6) respecto a t, para obtener la segunda derivada de x(t)
La aceleración es igual a la segunda derivada de la po- Segunda derivada sición con respecto al tiempo. Sustituyendo esta can- d2x t idad en la ec. (13.5), se encuentra que d t 2
" - - A u 2 cos (u t ) - Bu2 sen (u t )
d2x mdt2 = -kx
Dividimos ambos miembros entre m y pasamos el tér- mino con x al otro miembro (pasa con signo positivo). Así se encuentra que
(13.7) Sacamos (-u2) como factor común en el miembro de- recho y obtenemos
~- d2X - -u2 [A cos (ut) + B sen (u t ) (13.12)
2% + = 0 3,8) Nos damos cuenta de que la cantidad encerrada den-
dt2
dt2 tro de los corchetes es precisamente x(t), dada por la ec. (13.10). Por tanto, la ec. (13.12) se puede escribir como con la definición
w2 = k/m (I 3.9) d2x d t2 " - "U2 x(t)
Finalmente, pasamos el miembro derecho al izquier- La cantidad w2 así definida es positiva, ya que tanto do (pasa con signo positivo) y encontramos que
k como m son positivas. d2x d t2 - + U 2 X ( t ) = o (1 3.1 3)
La ecuación (13.8) es una ecuación que la cantidad x(t) debe satisfacer en todo instante. Esta ecuación nos indica que la x(t) que se anda buscando es tal que su segunda derivada con respecto al tiempo sumada al producto de w2 con x(t) tiene que dar cero en todo instante. La ec. (1 3.9) es distinta al tipo de ecuaciones que nos hemos encontrado hasta ahora. En efecto, ahora van involucradas derivadas. A diferencia de las otras ecuaciones que hemos tratado, que son ecuacio- nes algebraicas, ahora tenemos una ecuación llamada diferencial. No entraremos en detalles sobre cómo re- solver ecuaciones diferenciales. Lo que nos interesa es encontrar la solución de la ec. (1 3.8). Tomaremos la actitud de plantear la solución y demostrar que efec- tivamente la expresión propuesta es solución de la ec. (1 3.8).
Propondremos como solución de la ec. (13.9) la for- ma
x(t) = A cos (ut) + B sen (u t ) (1 3.1 O)
Comparando la ec. (13.13) con la ec. (13.8) nos da- mos cuenta de que la expresión (13.10) efectivamente satisface la ec. diferencial (13.8) s i
u = w (1 3.1 4)
donde w esta dada por la ec. (13.9). Por tanto, se puede decir que
x(t) = A cos (ut) + B sen (ut) (1 3.1 5)
es la solución de la ecuación diferencial (13.8). Nótese que las cantidades constantes A y B son arbitrarias; hasta este momento no han sido especificadas. En se- guida especificaremos estas cantidades. En el capítulo 4 estudiamos el hecho de que la expresión de la tra- yectoria de una partícula contiene dos constantes, que pueden ser ¡a posición y la velocidad iniciales. Esta información no la hemos considerado en la solución

RESORTE. TRAYECTORIA 325
(13.15). Supondremos que en el instante inicial, el re- De esta ecuación despejamos B sorte se encuentra en el punto de coordenadas x. y tie- ne una velocidad inicial vo (fig. 13.8). B = v0/w (1 3.1 9)
# t = O
* X
En consecuencia, las cantidades A y B quedan espe- cificadas en términos de las condiciones iniciales x. y vo (ecs. (1 3.1 7) y (1 3.1 9)).
Sustituyendo (1 3.1 7) y (1 3.19) en la ec. (1 3.1 51, obte- nem.os
x(t) = x. cos (of) + "sen (ut) (1 3.20) o
Figura 13.8 La expresión (13.20) es la solución de la ecuación di-
ferencial (13.8) sujeta a las condiciones iniciales da- das. En matemáticas se demuestra que la ec. (1 3.20) es la solución más general de la ecuación diferencial
Sustituyendo los valores (13.1 7) y (13.19) en la ec. se encuentra que la velocidad del cuerpo en el
instante t es
Ahora bien, la expresión (1 3.1 5) para x(t) es válida en TODO instante de tiempo. En particular, tiene que ser válida en el instante inicial t = O. Por tanto, escribi- mos la ec. (13.15) para este instante
x(t = O) = x0
= A cos (w X O) + B sen (o X O)
= A (1 3.1 6)
cos (O) = 1 y sen (O) = O
O sea
A = x. (1 3.1 7)
Por otro lado, la velocidad del cuerpo en cualquier instante la podemos obtener a partir de la expresión (1 3.1 5), usando la relación (3.1 8)
v( t ) = - = " A w sen (ut) + B o cos (ut) (1 3.18)
Al igual que para x(t), la expresión (13.18) es válida en todo instante de tiempo. En particular debe ser vá- lida en el instante inicial. Evaluando (13.18) para el instante inicial se tiene que
dx dt
v(t) = vo cos (ut) - xow sen (ut) (1 3.21)
Para la aceleración, se tiene que
a(t) = - xowz cos (ut) - wvo sen(ot)
y sacando w2 como factor común en el miembro de- recho
y usando la ec. (13.20) se obtiene que
a(t) = - o* x(t) (1 3.22)
Este resultado es justamente la ec. (13.8). En la solución dada por (13.20) se tienen identifica-
das .físicamente todas las cantidades que aparecen, excepto o. Para este fin, calculemos la posición que tiene el cuerpo al tiempo ( t + 27r/w). De la expresión (13.20), que es válida par: todo tiempo, en particular en el instante ( t + 27r/w), obtenemos que
x t +- = xocos o t + - ( 3 [ ( :>I +- 'O w sen [ w ( t + +)]
v(t = O) = vo Ahora recordamos que las funciones trigonométri- cas seno y coseno son funciones periódicas de sus ar-
= " A w sen (o X O) + Bw cos (w X O) gumentos. En particular se tiene que
= B o sen (a + 27d= sen a y cos (a + 27r)= cos a (1 3.23)
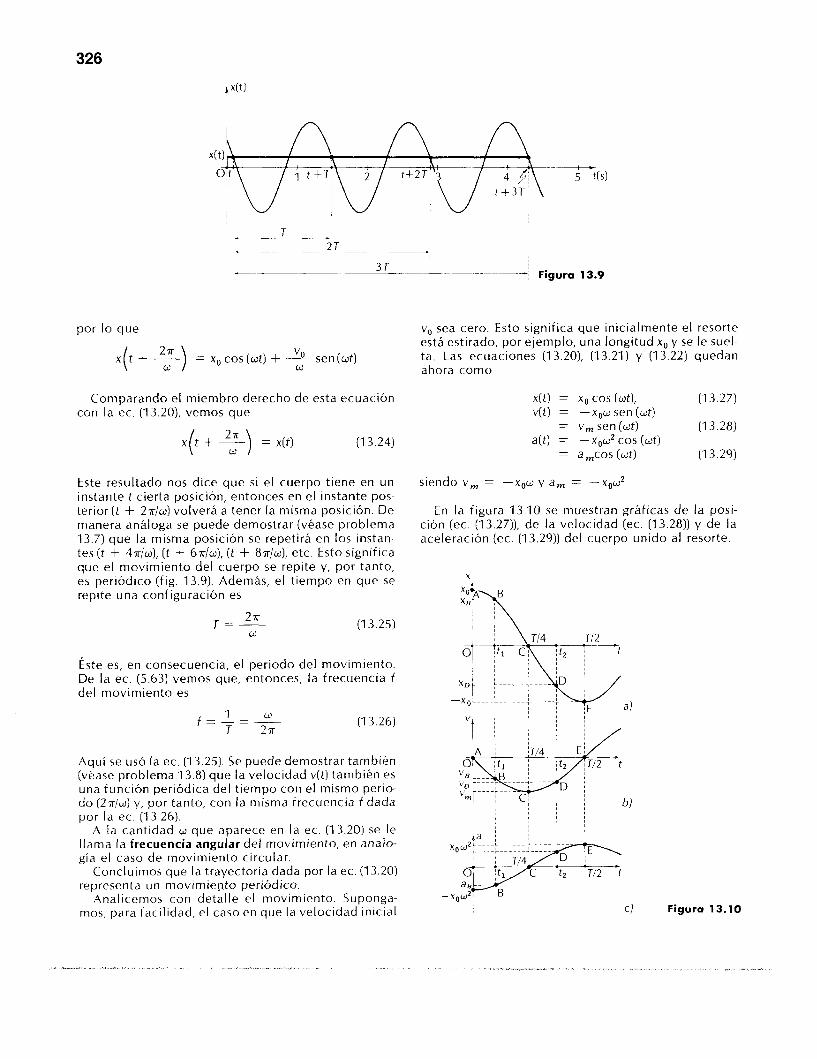
326
por lo que
x t + __ = x. cos ( w t ) + 1 sen(wt) ( 3 V
w
Comparando el miembro derecho de esta ecuación con la ec. (13.20), vemos que
x ( t + +) = x( t ) (1 3.24)
Este resultado nos dice que s i el cuerpo t iene en un instante t cierta posición, entonces en el instante pos- terior ( t + 2a/w) volverá a tener la misma posición. De manera análoga se puede demostrar (véase problema 13.7) que la misma posición se repetirá en los instan- tes ( t + 4 a / w ) , ( t + 6a/w), ( t + 8.1r/w), etc. Esto significa que el movimiento del cuerpo se repite y, por tanto, es periódico (fig. 13.9). Además, el tiempo en que se repite una configuración es
T = - 2íT W
(1 3.25)
Éste es, en consecuencia, el periodo del movimiento. De la ec. (5.63) vemos que, entonces, la frecuencia i del movimiento es
1 W
1 2 a f = - = " - (1 3.26)
Aquí se usó la ec. (1 3.25). Se puede demostrar también (véase problema 13.8) que la velocidad v( t ) también es una función periódica del t iempo con el mismo perio- do (27r/w) y, por tanto, con la misma frecuencia f dada por la ec. (13.26).
A la cantidad w que aparece en la ec. (13.20) se le llama la frecuencia angular del movimiento, en analo- gía el caso de movimiento circular.
Concluimos que la trayectoria dada por la ec. (13.20) representa un movimiento periódico.
Analicemos con detalle el movimiento. Suponga- mos, para facilidad, el caso en que la velocidad inicial
"
--: Figura 13.9
vo sea cero. Esto significa que inicialmente el resorte está estirado, por ejemplo, una longitud x. y se le suel- ta. Las ecuaciones (13.201, (13.21) y (1 3.22) quedan ahora como
x(t) = x0 cos (w t ) , (1 3.27) v( t ) = -xow sen (at)
a( t ) = -xou2cos ( w t ) = v, sen ( w t ) (1 3.28)
= a,cos (ut) (1 3.29)
siendo v, = -x0w y a, = -x0w2
En la figura 13.10 se muestran gráficas de la posi- ción (ec. (13.27)), de la velocidad (ec. (13.28)) y de la aceleración (ec. (13.29)) del cuerpo unido al resorte.
C l Figuro 13.10
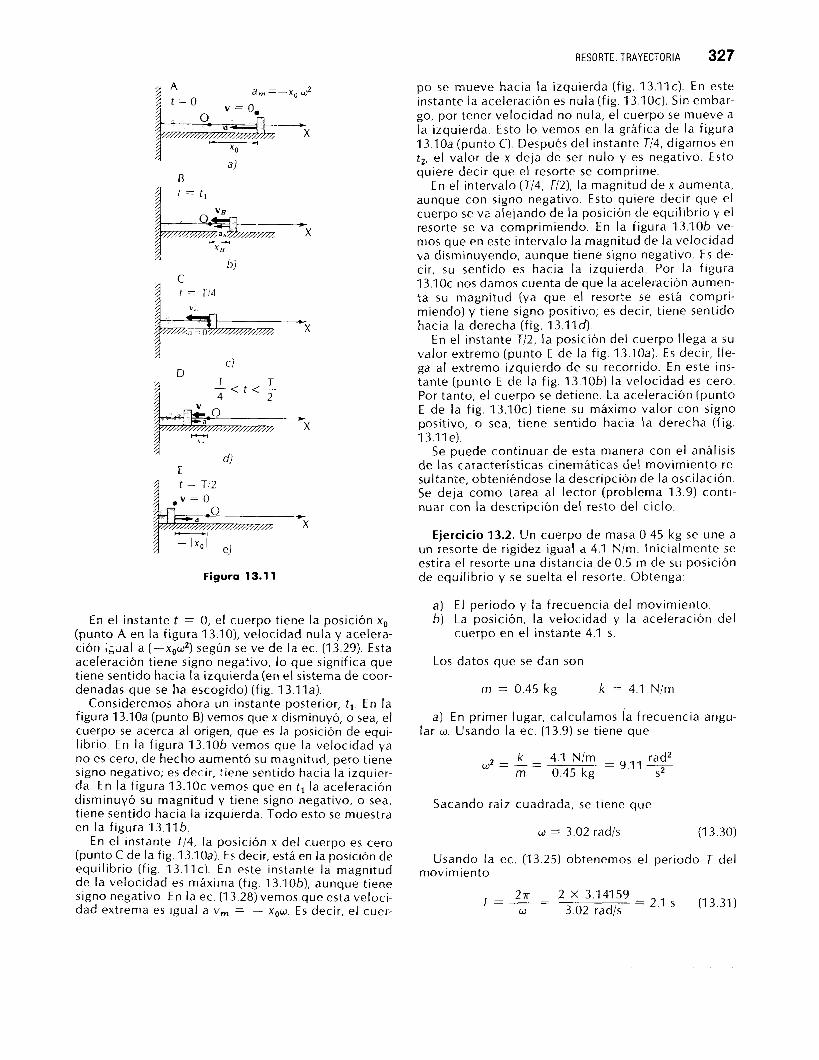
RESORTE. TRAYECTORIA 327
Figura 13.1 1
En el instante t = O, el cuerpo tiene la posición x. (punto A en la figura 13.10), velocidad nula y acelera- ción ;&da1 a (-xow2) según se ve de la ec. (13.29). Esta aceleración tiene signo negativo, lo que significa que tiene sentido hacia la izquierda (en el sistema de coor- denadas que se ha escogido) (fig. 13.11a).
Consideremos ahora un instante posterior, t,. En la figura 13.10a (punto B) vemos que x disminuyó, o sea, el cuerpo se acerca al origen, que es la posición de equi- librio. En la figura 13.10b vemos que la velocidad ya no es cero, de hecho aumentó su magnitud, pero tiene signo negativo; es decir, tiene sentido hacia la izquier- da. En la figura 1 3 . 1 0 ~ vemos que en t l la aceleración disminuyó su magnitud y tiene signo negativo. o sea, tiene sentido hacia la izquierda. Todo esto se muestra en la figura 13.11b.
En el instante T/4, la posición x del cuerpo es cero (punto C de la fig. 13.10a). Es decir, está en la posición de equi l ibr io ( f ig. 13.11~). En este instante la magnitud de la velocidad es máxima (fig. 13.10b), aunque tiene signo negativo. En la ec. (1 3.28) vemos que esta veloci- dad extrema es igual a v, = - xow. E s decir, el cuer-
p o se mueve hacia la izquierda (f ig. 13.11~). En este instante la aceleración es nula ( f ig. 13.10~). Sin embar- go, por tener velocidad no nula, el cuerpo se mueve a la izquierda. Esto lo vemos en la gráfica de la figura 13.10a (punto C). Después del instante Tl4, digamos en t2, el valor de x deja de ser nulo y es negativo. Esto quiere decir que el resorte se comprime.
En el intervalo (T/4, 7/21, la magnitud de x aumenta, aunque con signo negativo. Esto quiere decir que el cuerpo se va alejando de la posicibn de equil ibrio y el resorte se va comprimiendo. En la figura 13.10b ve- mos que en este intervalo la magnitud de la velocidad va disminuyendo, aunque tiene signo negativo. Es de- cir, su sentido es hacia la izquierda. Por la f igura 1 3 . 1 0 ~ nos damos cuenta de que la aceleración aumen- ta su magnitud (ya que el resorte se está compri- miendo) y tiene signo positivo; es decir, tiene sentido hacia la derecha (fig. 13.11d).
En el instante T/2, la posición del cuerpo l lega a su valor extremo (punto E de la fig. 13.10a). E s decir, Ile- ga al extremo izquierdo de su recorrido. En este ins- tante (punto E de la f ig. 13.10b) la velocidad es cero. Por tanto, el cuerpo se detiene. La aceleración (punto E de la f ig. 13.10~) t iene su máximo valor con signo positivo, o sea, tiene sentido hacia la derecha (fig. 13.1 1 e).
Se puede continuar de esta manera con el análisis de las características cinemáticas del movimiento re- sultante, obteniéndose la descripción de la oscilación. Se deja como tarea al lector (problema 13.9) conti- nuar con la descripción del resto del ciclo.
Ejercicio 13.2. Un cuerpo de masa 0.45 kg se une a un resorte de rigidez igual a 4.1 N/m. Inicialmente se estira el resorte una distancia de 0.5 m de su posición de equil ibrio y se suelta el resorte. Obtenga.
a) E l periodo y la frecuencia del movimiento. b) La posición, la velocidad y la aceleración del
cuerpo en el instante 4.1 s.
Los datos que se dan son
m = 0.45 kg k = 4.1 Nlm
a) En primer lugar, calculamos ¡a frecuencia angu- lar w. Usando la ec. (13.9) se tiene que
k 4.1 N/m m 0.45 kg S 2
w 2 = - = rad2 = 9.11 __
Sacando raíz cuadrada, se tiene que
w = 3.02 rad/s (1 3.30)
Usando la ec. (13.25) obtenemos el periodo T del movimiento
27r - 2 X 3.14159 TI-.--” W 3.02 radls = 2.1 S (13.31)

328 Cap. 13. OSCILACIONES Y VIBRACIONES
De la ec. (13.26) encontramos que la frecuencia f es
1 f=-=---” 7- 2.1 S
- 0.48 Hz (1 3.32)
6) Las condiciones iniciales que se dan, usando el mismo sistema de coordenadas de la figura 13.8 son
x. = 0.5 m y vo = O (1 3.33)
ya que inicialmente el resorte se suelta. Sustituyendo los valores dados en (1 3.30) y (1 3.33) en las ecs. (I 3.20), (13.21) y (13.22), se obtiene que la posición es
x(t) = 0.5 cos (3.02 t ) (1 3.34)
No escribimos las unidades, pero se sobreentiende que el tiempo t está dado en segundos y la posición x(t), en metros. Para la velocidad, encontramos que
v(t ) = “(0.5 X 3.02) sen (3.02 t ) = -1.51 sen(3.02 t ) (1 3.35)
Nuevamente, con el tiempo dado en segundos y la ve- locidad, en m/s. Para la aceleración se tiene que
a(t) = -4.56 cos (3.02 t ) (1 3.36)
estando dada en rn/sz.
= 4.1 s. Para la posición (ec. (13.34)). Ahora evaluamos estas cantidades para el instante t
x( t = 4.1 S) = 0.5 cos(3.02 X 4.1) = 0.5 cos (12.38 rad) = 0.5 X 0.9831 = 0.49 m
funciones trigonométricas arriba escritas es (ut). Si w está expresada en unidades de (radis) y el t iempo t en S, entonces el argumento tiene unidades de (radis) x S = rad.
Para la velocidad, usamos la ec. (13.35)
v(t = 4.1 S) = -1.51 sen (12.38 rad)
= 0.28 mis
Para la aceleración obtenemos de la ec. (13.36)
a(t = 4.1 S) = -4.56 cos (1 2.38 rad)
= -1.51 X (“0.1833)
= -4.56 X 0.9831 = -4.48 m/sZ
Estos valores nos dicen que, en el instante 4.1 S, el cuerpo se encuentra separado de la posición de equi- librio en una distancia de 0.49 m. Como el signo es po-
“/O* X”.‘” ^I I.. .- ~. . . . 1 - ., .,. ~ - ) . . . ” . -
sitivo, entonces el resorte está estirado. La velocidad del cuerpo tiene magnitud de 0.28 mis, y como el sig- no es positivo, tiene sentido hacia la derecha. La ace- leración tiene magnitud de 4.48 m/s2 y signo negativo, o sea, tiene sentido hacia la izquierda. Por tanto, la velocidad y la aceleración tienen sentidos opuestos. En consecuencia, la magnitud de la velocidad va dis- minuyendo.
Como se verá más adelante, otros sistemas tísicos, distintos al resorte, realizan movimientos que están descritos por ecuaciones de la forma (13.8). Un siste- ma que está descrito por esta ecuación recibe el nom- bre de oscilador armónico. El resorte es, entonces, un ejemplo de oscilador armónico.
13.4. ENERGíA
En esta sección estudiaremos aspectos energéticos en el movimiento del resorte.
La fuerza que ejerce el resorte sobre el cuerpo está dada por la ec. (13.4). La fuerza que genera el resorte es una fuerza conservativa (problema 13.17). Por tan- to, como se estudió en el capítulo 8, a este t ipo de tuerzas se le puede asociar una energía potencial. En particular, a la fuerza expresada por la ec. (13.4) le corresponde una energía potencial que ya calculamos en el ejercicio 8.12. Allí se obtuvo la ec. (8.61) para la energía potencial.
U(x) = “x* 1 2
(1 3.37)
Nos damos cuenta de que en el ejercicio 8.12 se ob- 1 tuvo esta expresión en la cual la coordenada x está re- ferida al mismo sistema de coordenadas en el que he- mos estado trabajando en este capítulo.
Además, recordamos que en el ejercicio 8.12, al ob-
Para el caso en que se estén considerando fuerzas conservativas, se aplica el principio de la conserva- ción de la energía mecánica. E s decir (véase ec. (8.45)), la cantidad
E = K + U
- -mv2 + - -x2 (13.38)
se conserva al transcurrir el tiempo. Aquí K es la ener- gía cinética, dada por la ec. (8.24). Esto significa que los valores numéricos que adquiere E en dos instantes distintos son los mismos.
- 1 1 2 2
Ejercicio 13.3. Se suelta un resorte que está estirado 3.7 cm de su posición de equilibrio. >Hasta dónde llega el cuerpo del otro lado de la posición de equi l ibr io?
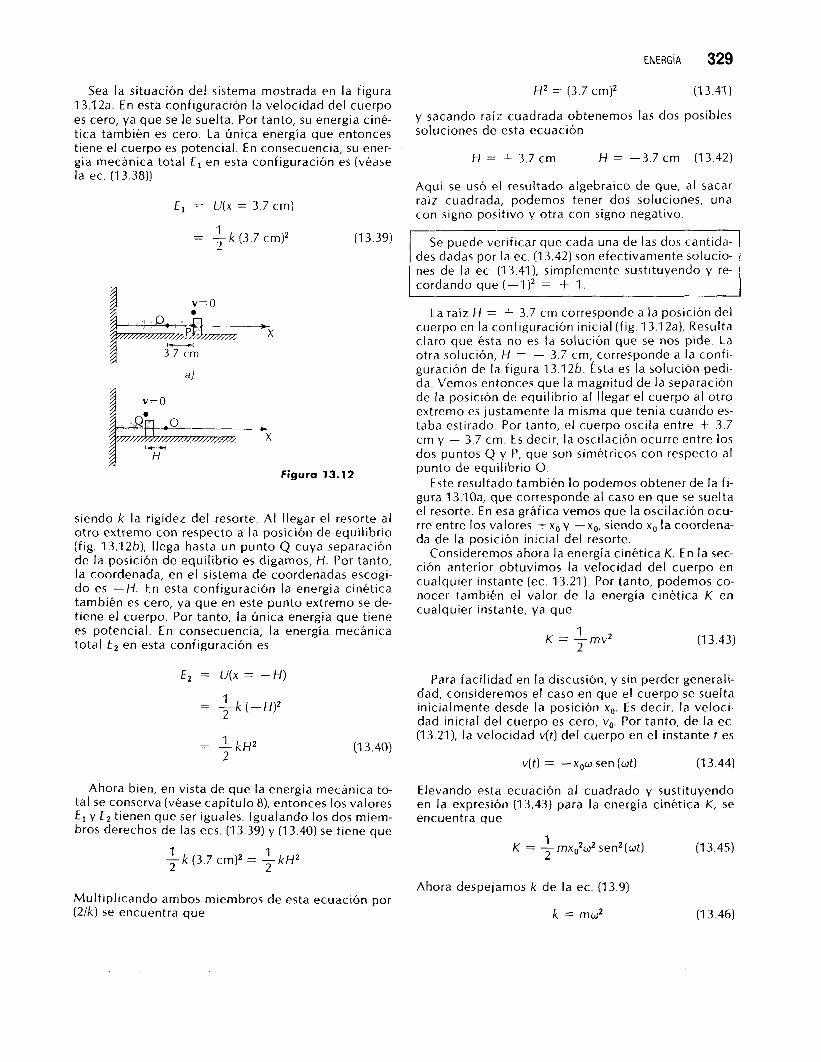
ENERG~A 329
Sea la situación del sistema mostrada en la figura Hz = (3.7 cm)? (1 3.41) 13.12a. En esta configuración la velocidad del cuerpo es cero, ya que se le suelta. Por tanto, su energía tiné- Y sacando raíz cuadrada obtenemos las dos posibles tica también es cero. La única energía que entonces soluciones de esta ecuación tiene el cuerpo es potencial. En consecuencia, su ener- gía mecánica total E, en esta configuración es (véase H = + 3.7 cm H = -3.7 cm (13.42) la ec. (13.38))
Aquí se usó el resultado algebraic0 de que, al sacar E , = U(x = 3.7 cm) raíz cuadrada, podemos tener dos soluciones, una
con signo positivo y otra con signo negativo. 1 = 7 k (3.7 cm)? -
i 3 7 cm
Figura 13.12
siendo k la rigidez del resorte. AI llegar el resorte al otro extremo con respecto a la posición de equil ibrio (fig. 13.12b), llega hasta un punto Q cuya separación de la posición de equilibrio es digamos, H. Por tanto, la coordenada, en el sistema de coordenadas escogi- do es -H. En esta configuración la energía cinética también es cero, ya que en este punto extremo se de- tiene el cuerpo. Por tanto, la única energía que tiene es potencial. En consecuencia, la energía mecánica total E z en esta configuración es
La raíz H = + 3.7 cm corresponde a la posición del cuerpo en la configuración inicial (fig. 13.12a). Resulta claro que ésta no es la solución que se nos pide. La otra solución, H = - 3.7 cm,,corresponde a la confi- guración de la figura 13.12b. Esta es la solución pedi- da. Vemos entonces que la magnitud de la separación de la posición de equilibrio al llegar el cuerpo al otro extremo es justamente la misma que tenía cuando es- taba estirado. Por tanto, el cuerpo oscila entre + 3.7 cm y - 3.7 cm. Es decir, la oscilación ocurre entre los dos puntos Q y P, que son simétricos con respecto al punto de equil ibrio O.
Este resultado también lo podemos obtener de la fi- gura 13.10a, que corresponde al caso en que se suelta el resorte. En esa gráfica vemos que la oscilación ocu- rre entre los valores + x. y -xo, siendo x. la coordena- da de la posición inicial del resorte.
Consideremos ahora la energía cinética K. En la sec- ción anterior obtuvimos la velocidad del cuerpo en cualquier instante (ec. 13.21). Por tanto, podemos co- nocer también el valor de la energía cinética K en cualquier instante, ya que
K = -mv2 2 I
(1 3.43)
€2 = U(X = - H) Para facilidad en la discusión, y sin perder generali-
1 -k(-H) ’ 2
1 2
dad, consideremos el caso en que el cuerpo se suelta inicialmente desde la posición xo. E s decir, la veloci- dad inicial del cuerpo es cero, vo. Por tanto, de la ec. (1 3.21), la velocidad v(t) del cuerpo en el instante t es
v(t) = - x o o sen (at) (1 3.44)
Ahora bien, en vista de que la energía mecánica to- Elevando esta ecuación al cuadrado y sustituyendo tal se conserva (véase capítulo 8), entonces los valores en la expresión (13.43) para la energía cinética K, se E y E2 tienen que ser iguales. Igualando los dos miem- encuentra que bros derechos de las ecs. (1 3.39) y (1 3.40) se tiene que
= (1 3.40)
“k (3.7 cm)? = -kHz 1 1 2 2
Ahora despejamos k de la ec. (13.9) Multiplicando ambos miembros de esta ecuación por (2/k) se encuentra que k = ma2 (1 3.46)
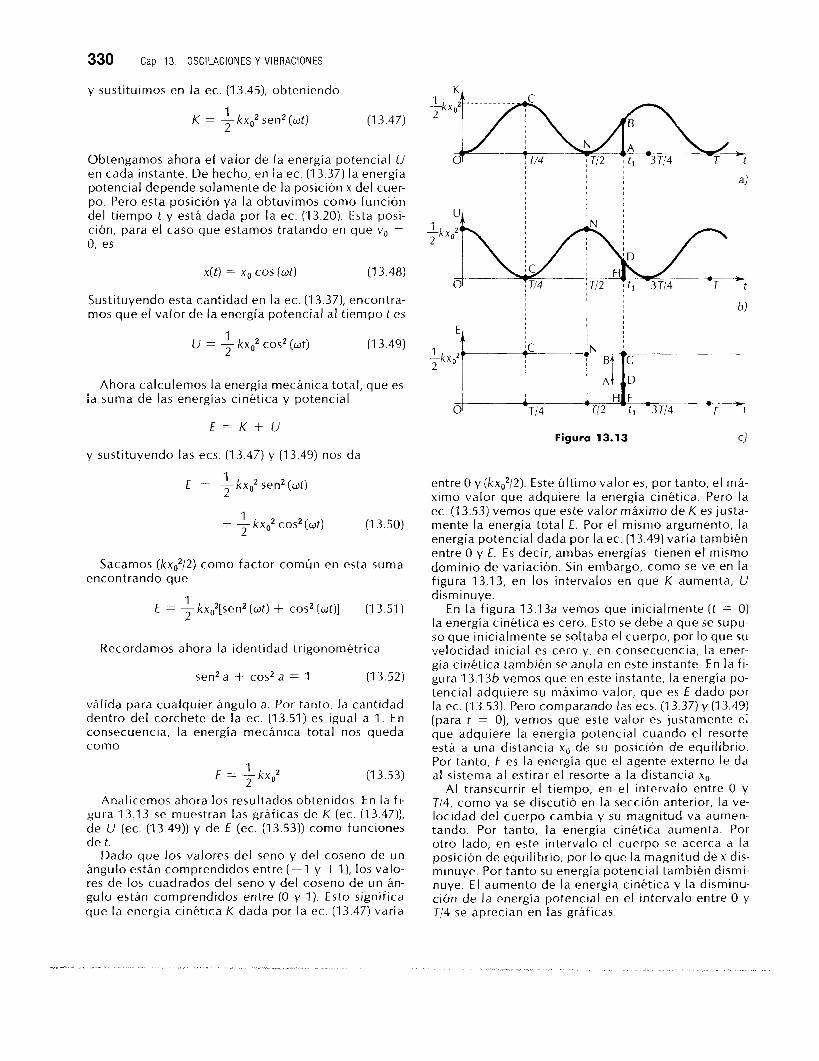
330 Cap. 13 OSCILACIONES Y VIBRACIONES
y sustituimos en la ec. (13.45), obteniendo
1 2
K = - kxo2 sen2 (ut) (1 3.47)
Obtengamos ahora el valor de la energía potencial U O 4 v4 ; TI2 tl 3Ti4 en cada instante. De hecho, en la ec. (13.37) la energía potencial depende solamente de la posición x del cuer- PO. Pero esta posición ya la obtuvimos como función del t iempo t y está dada por la ec. (13.20). Esta posi- ción, para el caso que estamos tratando en que vg = O, es
+ t ai
"1 -kxo2 2
1
'D x ( t ) = x g cos (ut) (1 3.48) IC
O ; TI4 :T/2 ; t , 3T/4 +
t Sustituyendo esta cantidad en la ec. ( I 3.37), encontra- mos que el valor de la energía potencial al tiempo t es bl
1 2 u = - kX,Z cos2 (ut) (1 3.49)
Ahora calculemos la energía mecánica total, que es la suma de las energías cinética y potencial I
O TI4 t E = K + U
y sustituyendo las ecs. (13.47) y (13.49) nos da
1 2
E = --x$ sen2 (ut)
+ kx$ COS' (ut) (1 3.50) 2
Sacamos (kx,2/2) como factor común en esta suma encontrando que
E = -kxg2[sen2 (ut) + cos2 (ut)] (13.51) I
2
Recordamos ahora la identidad trigonométrica
senZ a + cos2 a = 1 (1 3.52)
válida para cualquier ángulo a. Por tanto, la cantidad dentro del corchete de la ec. (13.51) es igual a 1. En consecuencia, la energía mecánica total nos queda como
1 E = -kxoZ 2
(13.53)
Analicemos ahora los resultados obtenidos. En la fi- gura 13.1 3 se muestran las gráficas de K (ec. (1 3.47)), de U (ec. (1 3.49)) y de E (ec. (13.53)) como funciones de t.
Dado que los valores del seno y del coseno de un ángulo están comprendidos entre ("1 y + I ) , los valo- res de los cuadrados del seno y del coseno de un án- gulo están comprendidos entre (O y 1). E s t o significa que la energía cinética K dada por la ec. (13.47) varía
Figura 13.13 ci
entre O y (kxO2/2). Este últ imo valor es, por tanto, el má- ximo valor que adquiere la energía cinética. Pero la ec. (1 3.53) vemos que este valor máximo de K es justa- mente la energía total E . Por el mismo argumento, la energía potencial dada por la ec. (1 3.49) varía también entre O y f . Es decir, ambas energías tienen el mismo dominio de variación. Sin embargo, como se ve en la figura 13.13, en los intervalos en que K aumenta, U disminuye.
En la figura 13.13a vemos que inicialmente ( t = O) la energía cinética es cero. Esto se debe a que se supu- so que inicialmente se soltaba el cuerpo, por lo que su velocidad inicial es cero y, en consecuencia, la ener- gía cinética también se anula en este instante. En la fi- gura 13.13b vemos que en este instante, la energía po- tencial adquiere su máximo valor, que es E dado por la ec. (1 3.53). Pero comparando las ecs. (1 3.37) y (1 3.49) (para t = O), vemos que este valor es justamente e; que adquiere la energía potencial cuando el resorte está a una distancia xg de su posición de equilibrio. Por tanto, E es la energía que el agente externo le da al sistema al estirar el resorte a la distancia x,,.
AI transcurrir el tiempo, en el intervalo entre O y 7/4, como ya se discutió en la sección anterior, la ve- locidad del cuerpo cambia y su magnitud va aumen- tando. Por tanto, la energía cinética aumenta. Por otro lado, en este intervalo el cuerpo se acerca a la posición de equilibrio, por lo que la magnitud de x dis- minuye. Por tanto su energía potencial también dismi- nuye. El aumento de la energía cinética y la disminu- ción de la energía potencial en el intervalo entre O y J/4 se aprecian en las gráficas.
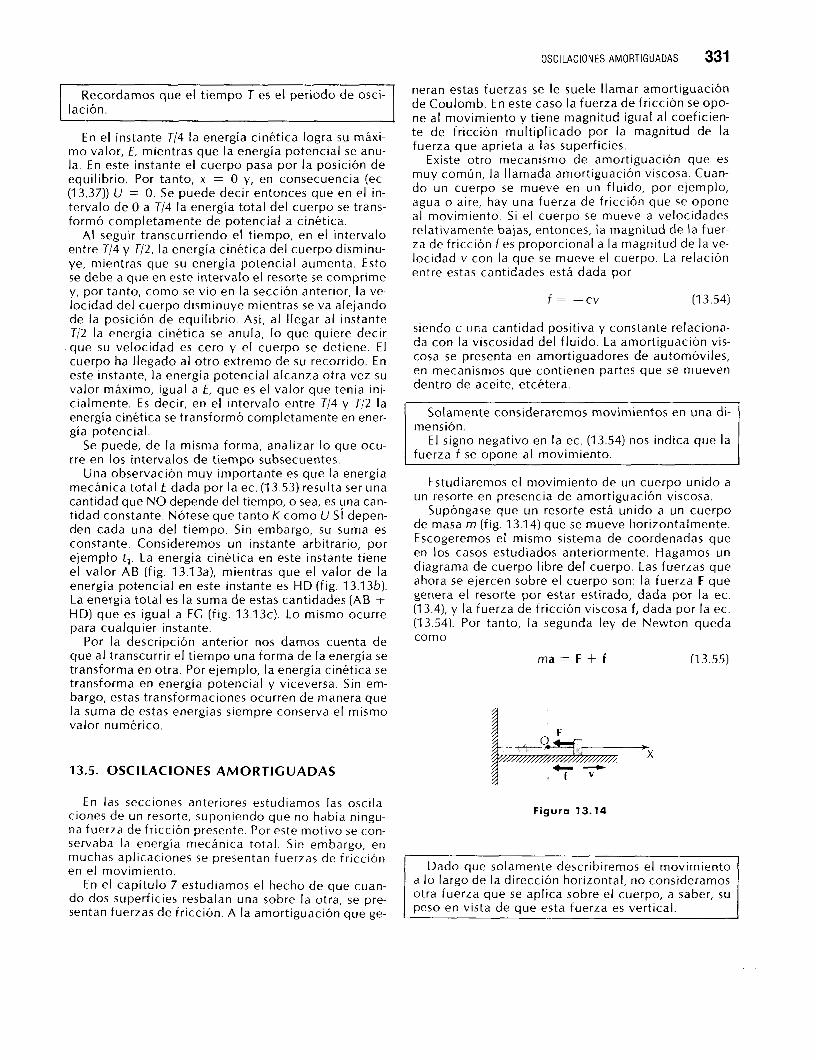
OSCILACIONES AMORTIGUADAS 331
Recordamos que el t iempo T es el periodo de osci- lación.
En el instante T/4 la energía cinética logra su máxi- m o valor, E, mientras que la energía potencial se anu- la. En este instante el cuerpo pasa por la posición de equilibrio. Por tanto, x = O y, en consecuencia (ec. (13.37)) U = O. Se puede decir entonces que en el in- tervalo de O a T/4 la energía total del cuerpo se trans- formó completamente de potencial a cinética.
AI seguir transcurriendo el tiempo, en el intervalo entre T/4 y T/2, la energía cinética del cuerpo disminu- ye, mientras que su energía potencial aumenta. Esto se debe a que en este intervalo el resorte se comprime y, por tanto, como se vio en la sección anterior, la ve- locidad del cuerpo disminuye mientras se va alejando de la posición de equilibrio. Así, al llegar al instante T/2 la energía cinética se anula, lo que quiere decir
. que su velocidad es cero y el cuerpo se detiene. E l cuerpo ha llegado al otro extremo de su recorrido. En este instante, la energía potencial alcanza otra vez su valor máximo, igual a E, que es el valor que tenía ini- cialmente. E s decir, en el intervalo entre T/4 y T / 2 la energía cinética se transformó completamente en ener- gía potencial.
Se puede, de la misma forma, analizar lo que ocu- rre en los intervalos de tiempo subsecuentes.
Una observación muy importante es que la energía mecánica total E dada por la ec. (1 3.53) resulta ser una cantidad que NO depende del tiempo, o sea, es Una can- tidad constante. Nótese que tanto K como U SI depen- den cada una del tiempo. Sin embargo, su suma es constante. Consideremos un instante arbitrario, por ejemplo t,. La energía cinética en este instante tiene el valor A B (fig. 13.13a), mientras que el valor de la energía potencial en este instante es HD ( f ig. 13.13b). La energía total es la suma de estas cantidades (AB + HD) que es igual a FC ( f ig . 13.13~) . Lo mismo ocurre para cualquier instante.
Por la descripción anterior nos damos cuenta de que al transcurrir el tiempo una forma de la energía se transforma en otra. Por ejemplo, la energía cinética se transforma en energía potencial y viceversa. Sin em- bargo, estas transformaciones ocurren de manera que la suma de estas energías siempre conserva el mismo valor numérico.
13.5. OSCILACIONES AMORTIGUADAS
En las secciones anteriores estudiamos las oscila- ciones de un resorte, suponiendo que no había ningu- na fuerza de fricción presente. Por este motivo se con- servaba la energía mecánica total. Sin embargo, en muchas aplicaciones se presentan fuerzas de fricción en el movimiento.
En el capítulo 7 estudiamos el hecho de que cuan- do dos superficies resbalan una sobre la otra. se Dre-
neran estas fuerzas se le suele llamar amortiguación de Coulomb. En este caso la fuerza de fricción se opo- ne al movimiento y tiene magnitud igual al coeficien- te de fr icción mult ipl icado por la magnitud de la fuerza que aprieta a las superficies.
Existe otro mecanismo de amortiguación que es muy común, la llamada amortiguación viscosa. Cuan- do un cuerpo se mueve en un fluido, por ejemplo, agua o aire, hay una fuerza de fricción que se opone al movimiento. Si el cuerpo se mueve a velocidades relativamente bajas, entonces, la magnitud de la fuer- za de fricción f es proporcional a la magnitud de la ve- locidad v con la que se mueve el cuerpo. La relación entre estas cantidades está dada por
f = “ C V (1 3.54)
siendo c una cantidad positiva y constante relaciona- da con la viscosidad del fluido. La amortiguación vis- cosa se presenta en amortiguadores de automóviles, en mecanismos que contienen partes que se mueven dentro de aceite, etcétera.
Solamente consideraremos movimientos en una di-
E l signo negativo en la ec. (13.54) nos indica que la mensión.
fuerza f se oDone al movimiento.
Estudiaremos el movimiento de un cuerpo unido a un resorte en presencia de amortiguación viscosa.
Supóngase que un resorte está unido a un cuerpo de masa m (fig. 13.14) que se mueve horizontalmente. Escogeremos el mismo sistema de coordenadas que en los casos estudiados anteriormente. Hagamos un diagrama de cuerpo libre del cuerpo. Las fuerzas que ahora se ejercen sobre el cuerpo son: la fuerza F que genera el resorte por estar estirado, dada por la ec. (13.4), y la fuerza de fricción viscosa f , dada por la ec. (13.54). Por tanto, la segunda ley de Newton queda como
m a = F + f (1 3.55)
t X
Figura 13.14
Dado que solamente describiremos el movimiento a lo largo de la dirección horizontal, no consideramos otra fuerza que se aplica sobre el cuerpo, a saber, su peso en vista de que esta fuerza es vertical. sentan fuerzas de fricción, A la amortiguación que ge- I
I ~, ~
J
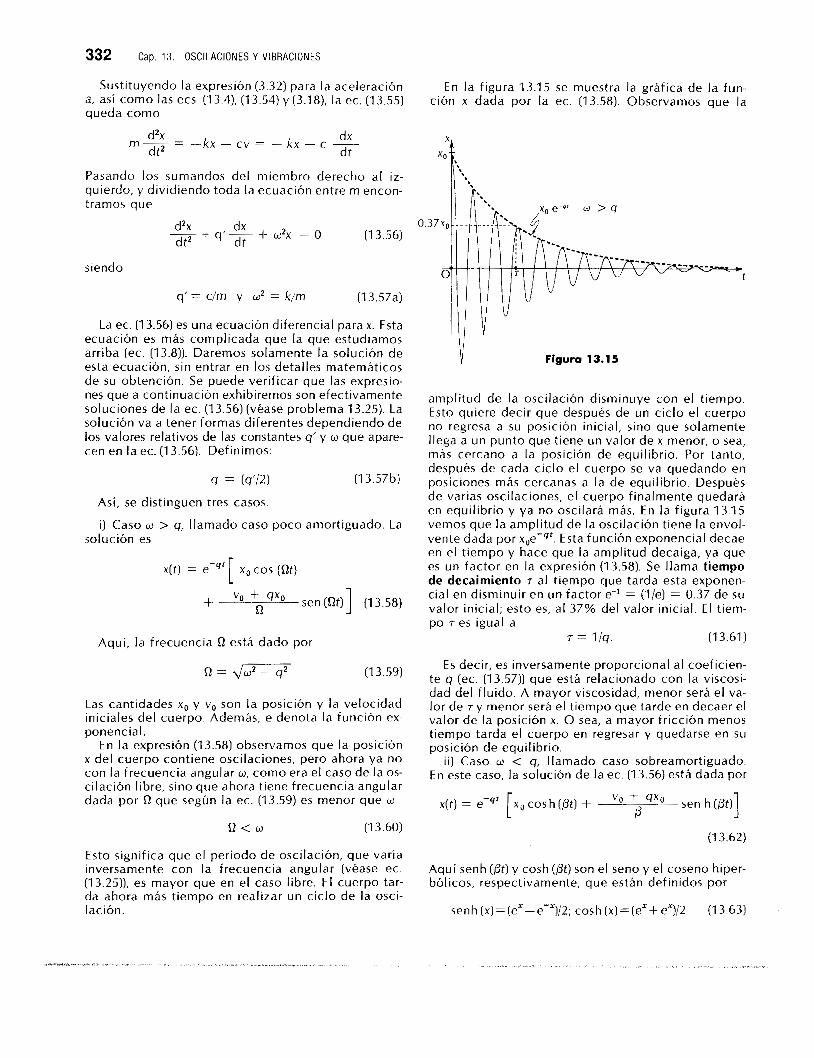
332 Cap. 13. OSCILACIONES Y VIBRACIONES
Sustituyendo la expresión (3.32) para la aceleración En la figura 13.15 se muestra la gráfica de la fun- a, así como las ecs. (13.4), (13.54) y (3.18), la ec. (13.55) ción x dada por la ec. (1 3.58). Observamos que la queda como
Pasando los sumandos del miembro derecho al iz- quierdo, y dividiendo toda la ecuación entre m encon- tramos que
d2x dx d t2 dt
~ + q" + W2X = o (1 3.56)
siendo
qf = c/m y w2 = k/m (1 3.57a)
La ec. (13.56) es una ecuación diferencial para x. Esta ecuación es más complicada que la que estudiamos arriba (ec. (13.8)). Daremos solamente la solución de esta ecuación, sin entrar en los detalles matemáticos de su obtención. Se puede verificar que las expresio- nes que a continuación exhibiremos son efectivamente soluciones de la ec. (13.56) (véase problema 13.25). La solución va a tener formas diferentes dependiendo de los valores relativos de las constantes q' y w que apare- cen en la ec. (13.56). Definimos:
Así, se distinguen tres casos.
i) Caso w > q, llamado caso poco amortiguado. La solución es
x(t) = e-qt [ x,, cos (fit)
+ + qxo sen (fit)] (13.58) fi
Aquí, la frecuencia Q está dado por
fi = Jw2 - q 2 (1 3.59)
Las cantidades x. y vo son la posición y la velocidad iniciales del cuerpo. Además, e denota la función ex- ponencial.
En la expresión (13.58) observamos que la posición x del cuerpo contiene oscilaciones, pero ahora ya no con la frecuencia angular w, como era el caso de la os- cilación libre, sino que ahora tiene frecuencia angular dada por Q que según la ec. (13.59) es menor que w
f i < w (1 3.60)
Esto significa que el periodo de oscilación, que varía inversamente con la frecuencia angular (véase ec. (13.25)), es mayor que en el caso libre. E l cuerpo tar- da ahora más tiempo en realizar un ciclo de la osci- lación.
Figura 13.15
amplitud de la oscilación disminuye con el t iempo. Esto quiere decir que después de un ciclo el cuerpo no regresa a su posición inicial, sino que solamente llega a un punto que tiene un valor de x menor, o sea, más cercano a la posición de equilibrio. Por tanto, después de cada ciclo el cuerpo se va quedando en posiciones más cercanas a la de equilibrio. Después de varias oscilaciones, el cuerpo finalmente quedará en equilibrio y ya no oscilará más. En la figura 13.15 vemos que la amplitud de la oscilación t iene la envol- vente dada por xoe-q'. Esta función exponencial decae en el t iempo y hace que la amplitud decaiga, ya que es un factor en la expresión (13.58). Se llama tiempo de decaimiento r al tiempo que tarda esta exponen- cia1 en disminuir en un factor e-l = ( l ie) = 0.37 de su valor inicial; esto es, al 37% del valor inicial. El t iem- po res igua l a
7 = 119. (1 3.61)
E s decir, es inversamente proporcional al coeficien- te q (ec. (13.57)) que está relacionado con la viscosi- dad del fluido. A mayor viscosidad, menor será el va- lor de 7 y menor será el tiempo que tarde en decaer el valor de la posición x. O sea, a mayor fricción menos tiempo tarda el cuerpo en regresar y quedarse en SU posición de equilibrio.
ii) Caso w < q, llamado caso sobreamortiguado. En este caso, la solución de la ec. (1 3.56) está dada por
x(t) = e-@ [x,, cos h (P t ) + + q x o sen h (Bt )] P
( I 3.62)
Aquí senh (Pt) y cosh (Pt) son el seno y el coseno hiper- bólicos, respectivamente, que están definidos por
senh(x)=(e"-ee-")/2; cosh(x)=(ex+ex)/2 (13.63)
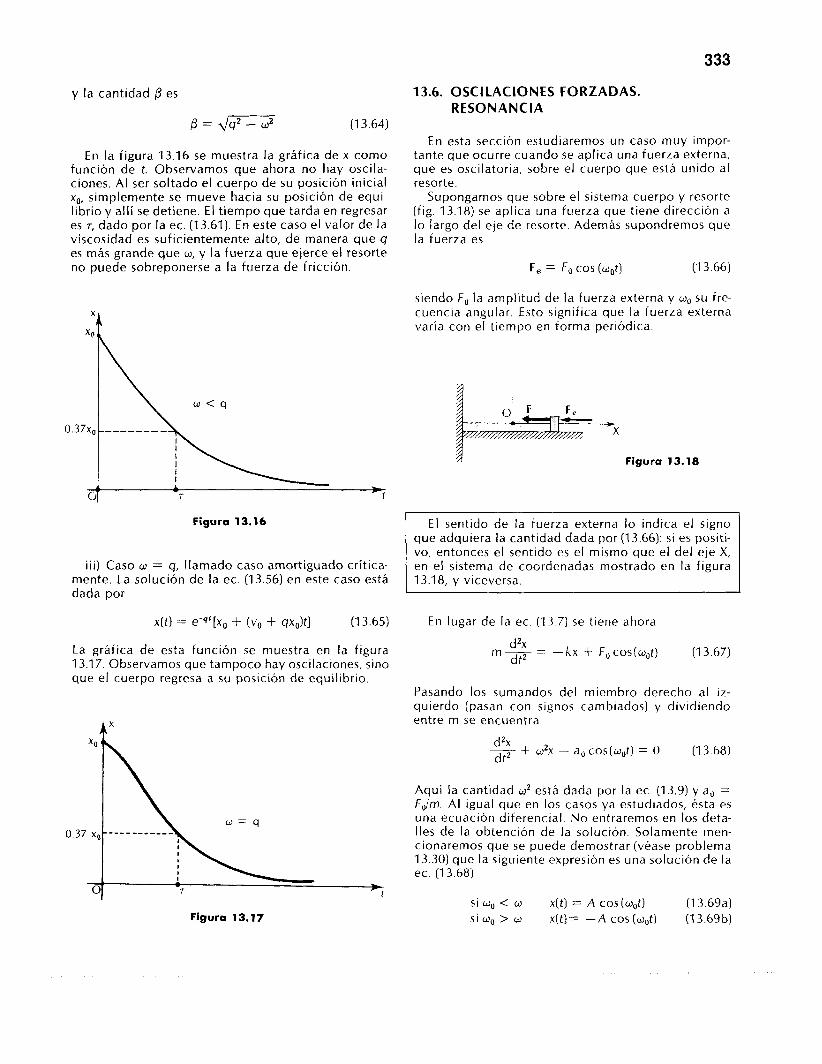
y la cantidad 0 es
p = J W (1 3.64)
333
13.6. OSCILACIONES FORZADAS. RESONANCIA
En la figura 13.16 se muestra la gráfica de x como función de t. Observamos que ahora no hay oscila- ciones. AI ser soltado el cuerpo de su posición inicial xo, simplemente se mueve hacia su posición de equi- l ibr io y allí se detiene. E l tiempo que tarda en regresar es 7, dado por la ec. (13.61). En este caso el valor de la viscosidad es suficientemente alto, de manera que g es más grande que w, y la fuerza que ejerce el resorte no puede sobreponerse a la fuerza de fricción.
En esta sección estudiaremos un caso muy impor- tante que ocurre cuando se aplica una fuerza externa, que es oscilatoria, sobre el cuerpo que está unido al resorte.
Supongamos que sobre el sistema cuerpo y resorte (fig. 13.18) se aplica una fuerza que tiene dirección a lo largo del eje de resorte. Además supondremos que la fuerza es
Fe = F, COS (mot) (I 3.66)
siendo F , la amplitud de la fuerza externa y o, su fre- cuencia angular. Esto significa que la fuerza externa varía con el tiempo en forma periódica.
24 Figura 13.18
Figura 13.16 E l sentido de la fuerza externa lo indica el signo que adquiera la cantidad dada por (1 3.66): s i es positi- vo, entonces el sentido es el mismo que el del eje X,
ii i) Caso w = g, llamado caso amortiguado crítica- mente. La solución de la ec. (13.56) en este caso está dada por
x(t) = e-qr[xo + (vo + gxo)t] (1 3.65) En lugar de la ec. (13.7) se tiene ahora
La gráfica de esta función se muestra en la figura 13.17. Observamos que tampoco hay oscilaciones, sino que el cuerpo regresa a su posición de equilibrio.
d 2x = “ k x + F,cos(~,~) (13.67)
Pasando los sumandos del miembro derecho al iz- quierdo (pasan con signos cambiados) y dividiendo entre m se encuentra A X
d2X
d t2 ___ + 02x - a, cos(w,t) = O (1 3.68)
Aquí la cantidad w2 está dada por la ec. (13.9) y a, = FJm. AI igual que en los casos ya estudiados, esta es una ecuación diferencial. No entraremos en los deta- lles de la obtención de la solución. Solamente men- cionaremos que se puede demostrar (véase problema 13.30) que la siguiente expresión es una solución de la ec. (1 3.68)
7 ** s i w, < w x(t) = A cos(w,t) (1 3.69a)
Figura 13.17 Si > x(t)= - A COS(OJ,~) (13.69b)
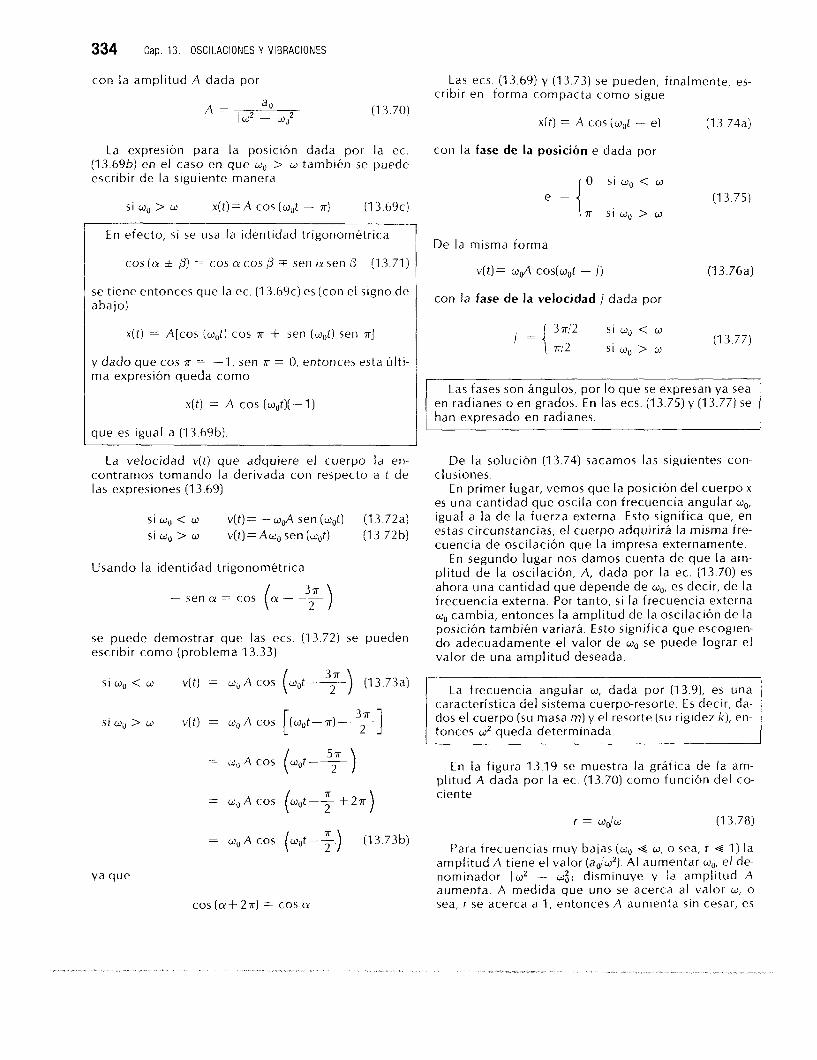
334 Cap. 13. OSCILACIONES Y VIBRACIONES
con la amplitud A dada por
A = a , ! o2 - Wu2 I ( I 3.70)
La expresión para la posición dada por la ec. (13.696) en el caso en que w,, > i~' también se puede escribir de la siguiente manera
SI wu > w x(t)=A C O S ( ~ , t - x) (1 3 . 6 9 ~ ) ~~~ ~ ~
En efecto, s i se usa la identidad trigonomPtrica
cos (a f 8) := cos a cos 0 F sen CY sen @ (1 3.71)
se tiene entonces que la ec. (1 3 . 6 9 ~ ) es (con el signo de abajo)
x(t) = A[cos (mot) cos x + sen (wut) sen a]
y dado que cos a = -1, sen T = O, entonces esta últi- ma expresión queda como
x ( t ) = A COS (~+t)(- l )
que es igual a (13.6913).
La velocidad v(t) que adquiere el cuerpo la en- contramos tomando la derivada con respecto a t de las expresiones (1 3.69)
s i o. < o v( t )= - wJ sen (aut) ( I 3.72a) siw" > w v(t)=Aw,sen(w,t) (13.72b)
Usando la identidad trigonométrica
- sen CY = cos CY - __ ( 3 se puede demostrar que las ecs. (13.72) se pueden escribir como (problema 13.33)
s i wU < w v(t) = wUA COS
S i W U > (L' v(t)
= w,A cos (wut--.) (13.7313) Ir
2
cos (a+ 2a) = cos CY
Las ecs. (13.69) y (13.73) se pueden, finalmente, es- cribir en forma compacta como sigue
x( t ) = A cos (w,t - e) (1 3 74a)
con la fase de la posición e dada por
0 s i O" < w
x s i U" > w e = (1 3.75)
De la misma forma
v(t)= w g cos(w,f - j) (1 3.76a)
con la fase d e la velocidad j dada por
(1 3.77) S I W" > w
Las fases son ángulos, por lo que se expresan ya sea en radianes o en grados. En las ecs. (13.75) y (13.77) se , han expresado en radianes.
De la solución (13.74) sacamos las siguientes con- clusiones.
En primer lugar, vemos que la posición del cuerpo x es una cantidad que oscila con frecuencia angular wo, igual a la de la fuerza externa. Esto significa que, en estas circunstancias, el cuerpo adquirirá la misma fre- cuencia de oscilación que la impresa externamente.
En segundo lugar nos damos cuenta de que la am- pl i tud de la oscilación, A, dada por la ec. (13.70) es ahora una cantidad que depende de wo, es decir, de la frecuencia externa. Por tanto, s i la frecuencia externa o. cambia, entonces la amplitud de la oscilación de la posición también variará. E s t o significa que escogien- do adecuadamente el valor de w, se puede lograr el valor de una amplitud deseada.
La frecuencia angular w, dada por (13.9), es una característica del sistema cuerpo-resorte. Es decir, da- dos el cuerpo (su masa m) y el resorte (su rigidez k), en- tonces o* queda determinada
En la figura 13.19 se muestra la gr6fica de la am- pl i tud A dada por la ec. (13.70) como función del co- ciente
r = oo/o (1 3.78)
Para frecuencias muy balas (au 6 w, o sea, r 4 1) la amplitud A t iene el valor (acJwZ). AI aumentar u", el de- nominador !a2 - w:\ disminuye y la amplitud A aumenta. A medida que uno se acerca al valor w, o sea, r se acerca a 1, entonces A aumenta sin cesar, es
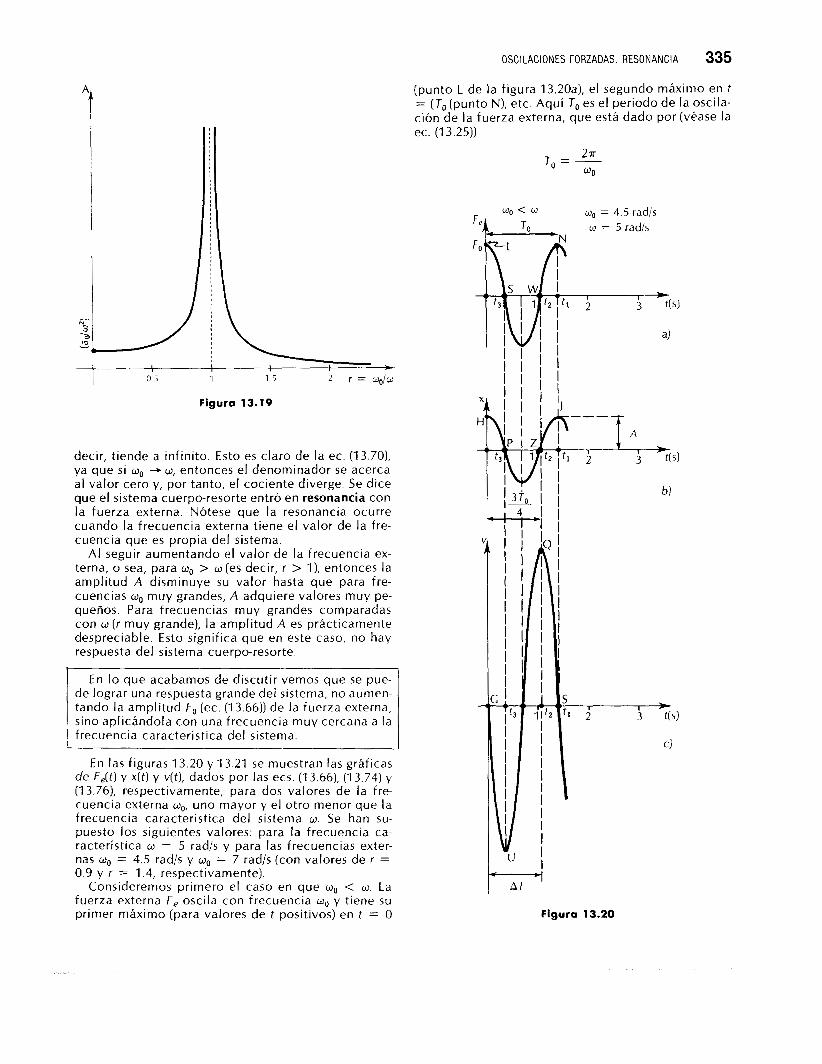
OSClLAClONES FORZADAS. RESONANCIA 335
3
, I o 5 1 1 5 2 r = wo/w
4
Figura 13.19
decir, tiende a infinito. Esto es claro de la ec. (13.701, ya que si wo +u, entonces el denominador se acerca al valor cero y, por tanto, el cociente diverge. Se dice que el sistema cuerpo-resorte entró en resonancia con la fuerza externa. Nótese que la resonancia ocurre cuando la frecuencia externa tiene el valor de la fre- cuencia que es propia del sistema.
AI seguir aumentando el valor de la frecuencia ex- terna, o sea, para wo > o (es decir, r > I ) , entonces la amplitud A disminuye su valor hasta que para fre- cuencias wo muy grandes, A adquiere valores muy pe- queños. Para frecuencias muy grandes comparadas con w ( r muy grande), la amplitud A es prácticamente despreciable. Esto significa que en este caso, no hay respuesta del sistema cuerpo-resorte.
de lograr una respuesta grande del sistema, no aumen- tando la amplitud F, (ec. (13.66)) de la fuerza externa, sino aplicándola con una frecuencia muy cercana a la
En las figuras 13.20 y 13.21 se muestran las gráficas de FAt) y x(t) y v(t), dados por las ecs. (1 3.661, (1 3.74) y (13.76), respectivamente, para dos valores de la fre- cuencia externa wo, uno mayor y el otro menor que la frecuencia característica del sistema u. Se han su- puesto los siguientes valores: para la frecuencia ca- racterística w = 5 radis y para las frecuencias exter- nas wo = 4.5 rad/s y wo = 7 rad/s (con valores de r = 0.9 y r = 1.4, respectivamente).
Consideremos primero el caso en que wo < w. La fuerza externa Fe oscila con frecuencia wo y tiene su primer máximo (para valores de t positivos) en t = O
(punto L de la f igura 13.20a), el segundo máximo en t = ( T o (punto N), etc. Aquí To es el periodo de la oscila- ción de la fuerza externa, que está dado por (véase la ec. (1 3.25))
To = - 2a U 0
wo = 4.5 rad15 w = 5 rad15
b
Figura 13.20
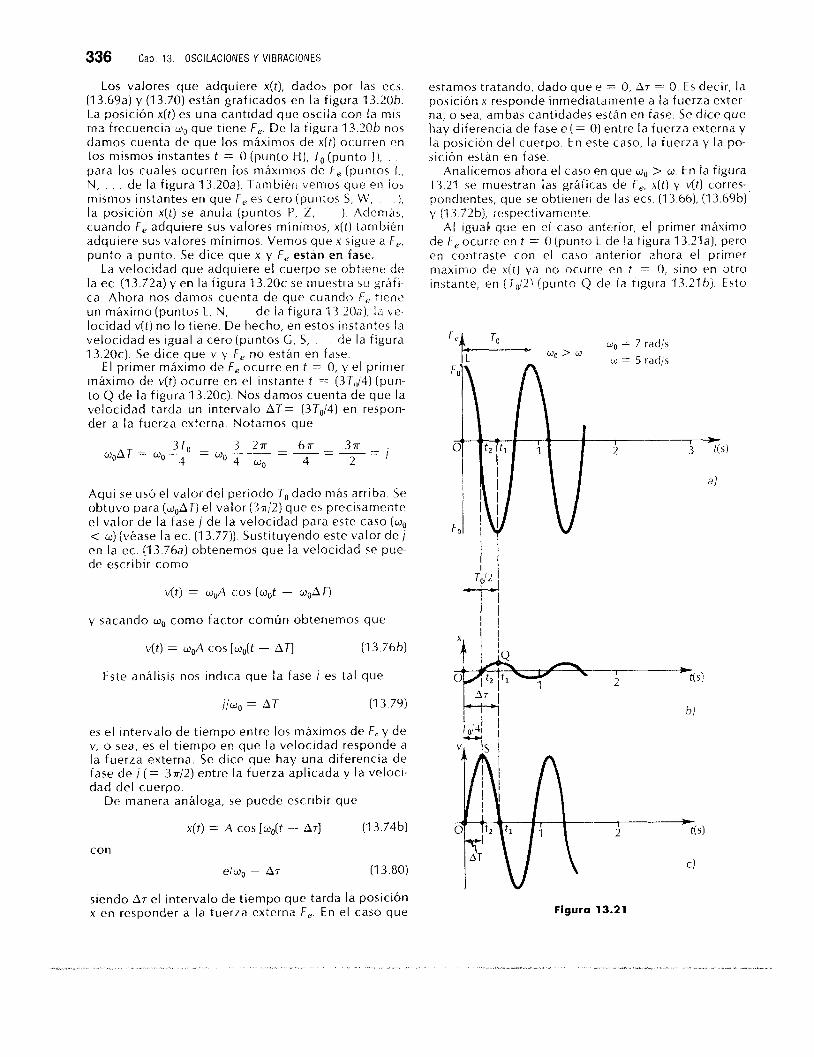
336 CaD. 13. OSCILACIONES Y VIBRACIONES
Los valores que adquiere x(t), dados por las ecs. (1 3.69a) y (1 3.70) están graficados en la figura 13.2Ob. La posición x(t) es una cantidad que oscila con la mis- ma frecuencia u,, que tiene F e . De la figura 13.20b nos damos cuenta de que los máximos de x(t) ocurren cn los mismos instantes t = O (punto H ) , To (punto 11, para los cuales ocurren los máximos de F e (puntos L , N, . de la figura 13.2Oa). También vemos que en ¡os mismos instantes en que Fe es cero (puntos S, N', ), la posición x([) se anula (puntos P, Z, ). Adem;ls, cuando F , adquiere sus valores mínimos, xi t ) también adquiere sus valores mínimos. Vemos que x sigue a Fe, punto a punto. Se dice que x y Fe están en fase.
La velocidad que adquiere el cuerpo se obtiene de la ec. (1 3.72a) y en la figura 1 3 . 2 0 ~ se muestra su gráfi- ca. Ahora nos damos cuenta de que cuando Fe tiene un máximo (puntos L, N, de la figura 1'3 N a j , ¡a ve- locidad v(tj no lo tiene. De hecho, en estos instantes la velocidad es igual a cero (puntos C, S, . de la figura 13 2Ocj. Se dice que v y F e no están en fase.
E l primer máximo de F e ocurre en t = O, y el primer máximo de v(t) ocurre en el instante t = (37,/4) (pun- t o Q de la figura 13.20~). Nos damos cuenta de que la velocidad tarda un intervalo A7-= (37,/4) en respon- der a la fuerza externa. Notamos que
Aquí se u s 6 el valor del periodo T, dado mhs arriba. Se obtuvo para (LJ,AT) el valor (3d2) que es precisamente el valor de la fase j de la velocidad pard este caso (u, < w) [véase la ec. (1 3.77)). Sustituyendo este valor de j en la ec. (13.76a) obtenemos que la velocidad se pue- de escribir como
~ ( t ) = WJ COS (w,t - w ~ A T )
y sacando w0 como factor común obtenemos que
~ ( t ) = w,A COS [w,(t - AT] (1 3.76b)
Este análisis nos indica que la fase j es tal que
j / w o = AT (1 3.79)
es el intervalo de t iempo entre los máximos de F, y de v, o sea, es el tiempo en que la velocidad responde a la fuerza externa. Se dice que hay una diferencia de fase de j [ = 3r /2 ) entre la fuerza aplicada y la veloci- dad del cuerpo.
De manera análoga, se puede escribir que
~ ( t ) = A COS [w&t -- AT] (1 3.7413)
con
eiw, = AT (1 3.80)
siendo AT el intervalo de tiempo que tarda la posición x en responder a la fuerza externa F e . En el caso que
estamos tratando, dado que e = O, A7 = O. Es decir, la posición x responde inmediatamente a la fuerza exter- na, o sea, ambas cantidades están en fase. Se dice que hay diferencia de fase e ( = O) entre la fuerza externa y la posición del cuerpo. En este caso, la fuerza y la po- sición están en fase.
Analicemos ahora el caso en que u,, > w. En la figura 13.21 se muestran las gráficas de fe, x(t) y v(t) corres- pondientes, que se obtienen de las ecs. (13.66), (13.69b) y (13.72b), respectivamente.
Al igual que en el caso anterior, et primer máximo de Fe ocurre en t = O (punto L de la tigura 13.21a), pero en contraste con el caso antertor ahora el primer máximo de x(t) y a no ocurre en t = 0 , sino en atro instante, en (Td2) (punto Q de la tigura 13.21b). Esto
Figura 13.21

OSCILACIONES FORZADAS CON AMORTlGUACldN 337
significa que x(t) y F e no están en fase. A la posición x le l leva un intervalo A7 dado por (Jd2) en responder a la fuerza externa. Calculemos ahora
que es justamente la fase e de x dada por la ec. (1 3.75) para wo > w.
De manera análoga, se observa de la figura 1 3 . 2 1 ~ que la velocidad vtt) tampoco está en fase con la fuerza externa. E l primer máximo de v ocurre en el instante (Jd4) (punto S de la f igura 13.21~). Es decir, el intervalo A J entre los máximos es ahora
AT = (Td4)
Calculemos el producto
que es justamente igual a la fase j de v por la ec. (13,77) para wo > w.
Se dice que hay una diferencia de fase de e (= .n) entre la fuerza aplicada y la posición, así como una diferencia de fase j ( = 62) entre dicha fuerza y la ve- locidad.
De lo que acabamos de analizar concluimos que la fase de cualquiera de las dos cantidades x o v es pro- porcional al intervalo de t iempo que estas cantidades tardan en responder a la fuerza externa aplicada al sistema resorte-cuerpo (véanse las ecs. (13.79) y (1 3.80)).
E l fenómeno de resonancia es muy común. En gene- ral, cuando un sistema mecánico puede oscilar, lo hace con valores de la frecuencia característicos del siste- ma. En nuestro caso del cuerpo-resorte hay solamente un valor característico de la frecuencia. Sin embargo, para sistemas más complicados pueden existir varios valores de las frecuencias características.
Ahora bien, s i a un sistema mecánico que puede os- cilar se le aplica una fuerza externa que tiene una fre- cuencia que es igual a alguna de las frecuencias ca- racterísticas del sistema, entonces el sistema entra en resonancia y la amplitud de la oscilación adquirida aumenta mucho.
Acabamos de encontrar que en la resonancia la am- plitud de la oscilación es infinita. Esto quiere decir que el cuerpo se aleja de la posición de equil ibrio una distancia infinita. Es claro que si esto ocurriera, enton- ces, en primer lugar llegaría un momento en que el re- sorte entraría en una región no elástica (fig. 13.6) y posteriormente el sistema se destruiría. Si no existe al- gún mecanismo que lo impida, esto es en efecto lo que ocurre. Un mecanismo para evitar esta destruc- ción puede ser la amortiguación viscosa. Esto lo estu- diaremos en la siguiente sección.
Es importante resaltar que la destrucción a que nos referimos en el párrafo anterior también puede ocu-
rrir en cualquier otro sistema mecánico que puede os- cilar. Si el sistema entra en resonancia con una fuerza externa, entonces su amplitud de oscilación puede aumentar tanto que el sistema se destruya. Un ejemplo impresionante de lo anterior ocurrió en el aiio de 1940 en el puente de Tacoma, Estados Unidos. Unos meses después de haber sido completado, un temporal azotó la región, y ocurrió que una de las componentes de la fuerza del viento fue de frecuen- cia justamente igual a una de las frecuencias caracte- rísticas del puente E l puente entró en resonancia con el viento y empezó a oscilar con una amplitc~d muy grande que lo destruyó.
O t ro caso fue el de¡ terremoto que sacudió a la ciu- dad de México en 1985. Esta perturbación contenia una frecuencia de 0.5 Hz. Resultó que un buen núme- ro de edificios de alrededor de 6 pisos tenían entre s u s frecuencias naturales una de valor de alrededor de 0.5 Hz. Estos edificios entraron en resonancia, sus ampli- tudes de oscilación crecieron mucho y, como resulta- do, se destruyeron.
Cuando se diselian estructuras es importante hacer- lo de manera que sus frecuencias características sean tales que estén lo más lejanas posibles de las fre- cuencias de las perturbaciones a las que la estructura pueda estar sujeta, como por ejemplo, vientos, terre- motos, etcétera.
Por otro lado, existen otros fenómenos en los que la resonancia se utiliza de manera ventajosa. Por ejemplo, el sintonizador de un aparato de radio o de televisión es un circuito electrónico que se ajusta para que esté en resonancia con la onda electromag- n6tica que emite la estación de radio. AI ser iguales las frecuencias de la estación y la característica del circuito, su respuesta es muy grande y asi se logra se- leccionar, de las ondas que emiten todas las estacio- nes de la localidad, la que se desea.
Otro fenómeno en el que se presenta la resonancia ocurre en la absorción y emisibn de luz por las sustan- cias.
13.7. OSCILACIONES FORZADAS CON A M O R T I C U A C I ~ N
Consideremos ahora el caso en que el sistema cuer- po-resorte exper imenta s imultáneamente una amortiguación viscosa y una fuerza externa oscilato- ria. Usando la misma notación que en las secciones anteriores, se tiene que ahora la ecuación de movi- miento es
ma =m- - - d % d t2
“ k x - c v + F, COS (wet) (1 3.81)
Esta ecuación se puede escribir entonces como
d t2 dt d t - + q’”. dx + W2x--ao cos (wet) = O (13 821

338 Cap. 1 3 . OSCILACIONES Y VIBRACIONES
La solución de esta ecuación es (véase problema con n un número entero positivo. La fase e está dada 13.35) por la ec. (13.86).
x(t) = A(w,) cos (w,t - e) (1 3.83)
siendo ahora la amplitud A(w, ) de la oscilación igual a
(1 3.84)
Además, la fase e que aparece en (13.83) está dada por
Aquí se usaron dos resultados:
1. - sena = cos ( a + +) V
2. si dos ángulos difieren en un múltiplo entero de 27r, entonces sus cosenos tienen el mismo valor. Se esco- ge aquel valor de n en la ec. ( I 3.88) de tal forma que j tenga e l mínimo valor positivo.
cos e =r w2 - u o 2
R , sene = - (13.86) Ahora interpretamos estos resultados. La ec. (13.83)
nos indica que el cuerpo oscila con la misma fre- R
En matemáticas se demuestra que la solución más general de la ecuación diferencial (13.82) es la suma de dos cantidades: la primera cantidad es la solución de la ec. (1 3.56) y la otra cantidad es la expresión ( I 3.83). Sin embargo, como se puede ver de la ec. (13.58) o de las ecs. (13.62) y (13.65), que son las soluciones de la ec (13.56), la prirnera contribución a la solución gene- ral de la ec. (13.82) decae exponencialmente en el tiem- po. Por tanto, para tiempos suficientemente grandes sÓ10 queda la expresión (13.83).
Se dice que la solución de (13.82) tiene una contri- bución transitoria (la correspondiente de las expresio- nes (-13.581, (13.62) o (13.65)) y una contribución esta- cionaria (la expresión (13.83)).
Observamos que las condiciones iniciales del siste- ma solamente se presentan en la parte transitoria de la solución. Por tanto, después de que ha pasado un tiempo suficientemente grande y la contribución tran- sitoria ya no existe, el sistema se rige según la contri- bución estacionaria que no depende de las condicio- nes iniciales. E l sistema ha “olvidado” sus condi- ciones inicales. Este “olvido” se debe a la fricción, que ha disipado la contribución transitoria.
Solamente se estudiará ahora ,la contribución esta- cionaria.
La velocidad v(t) del cuerpo la obtenemos a partir de la ec. (13.83)
v(t) := - dx d t
- -- - wo C\(q,) sen (mo t - e)
= w,A(w,)cos (w,t - e) + - = w O A ( q J cos (u,t - j) (1 3.87)
i 2 “ I siendo ahora la fase de la velocidad j
j 2 n s $- e - - 2 H (1 3.88)
cuencia angular wo de l a fuerza externa. Asimismo, al igual que en el caso estudiado en la
sección anterior, la amplitud de la oscilación, dada en la ec. (13.84) depende de la frecuencia wo de la fuerza aplicada. Sin embargo, ahora la dependencia es más complicada que la dada en la ec. (1 3.70). Para analizar ahora la amplitud conviene introducir la cantidad Q definida como
Q = wlq’ (1 3.89)
Despejando q’ se tiene que
q’ = wlQ (1 3.90)
Sustituimos esta cantidad en la ec. (13.84). La ampli- tud A(wo) queda dada por la misma expresión (13.84), pero ahora con
R = d ( w 2 - o:)* + (wwdQ)’ (1 3.91)
La cantidad Q definida en (13.89) nos da una medi- da de la magnitud de la fricción: mientras mayor sea la fricción, mayor será q’ y menor será Q, y viceversa. Esto quiere decir que para valores grandes de Q nos estaremos acercando al caso de un sistema con una fuerza externa sin fricción. En el caso contrario, valo- res pequeños de Q nos indican que la fricción es muy grande. Nótese que Q es una cantidad sin dimensio- nes (véase problema 13.36).
En la figura 13.22 se muestran gráficas de la magni- t ud A(wo) como funcil jn del cociente r = u,/w, para va- lores de Q iguales a IO, 8, 5, 3 y l
En primer lugar vemos que ahora la magnitud de A ya no adquiere valores infinitos (véase problema 13.37). Es to significa que el hecho de que haya fric- ción evita que las oscilaciones adquieran amplitudes extraordinariamente grandes. Sin embargo, se ve en la figura que para valores de Q grandes, por ejemplo, de I O , la amplitud, aunque finita, es grande. Es decir, en estos casos en que hay una pequeña fricción la amplitud de la oscilación es bastante grande.
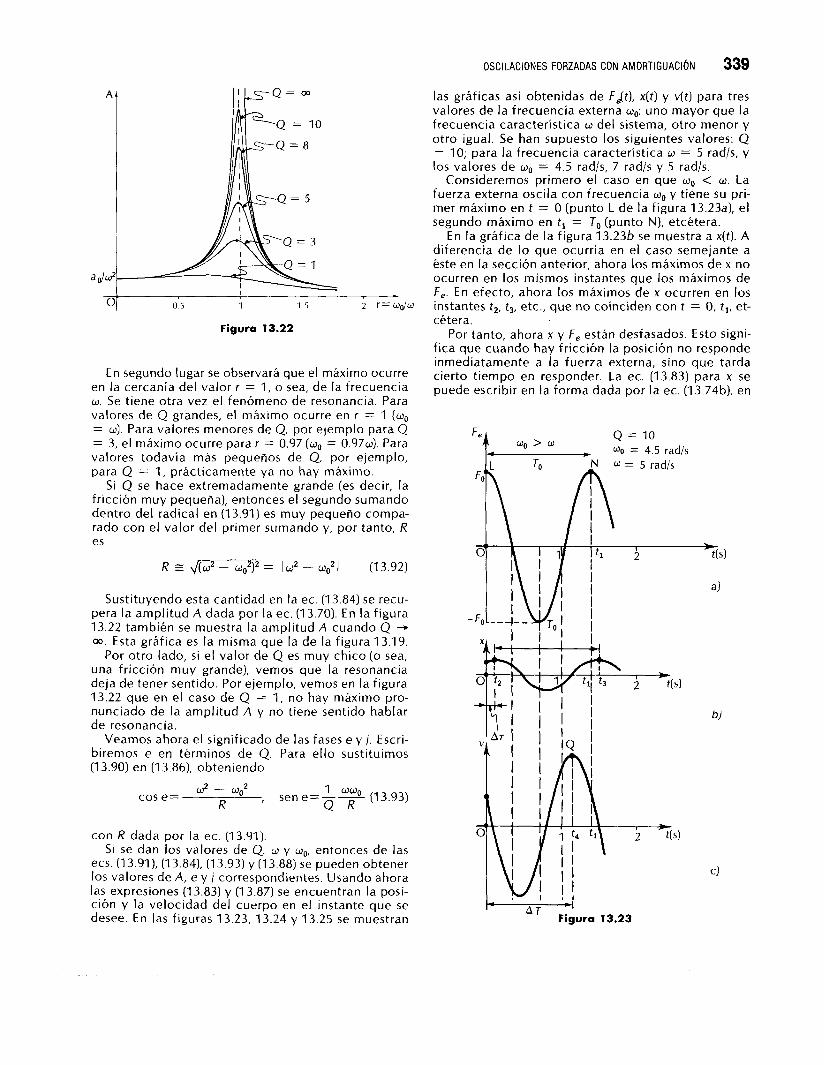
OSCILACIONES FORZADAS CON AMORTlGUACldN 339
a ,,/u2
01 O 5 1 1 5 2 r= wdw
Figura 13.22
En segundo lugar se observará que el máximo ocurre en la cercanía del valor r = 1, o sea, de la frecuencia u. Se tiene otra vez el fenómeno de resonancia. Para valores de Q grandes, el máximo ocurre en r = 1 (uo = a). Para valores menores de Q, por ejemplo para Q = 3, el máximo ocurre para r = 0.97 (u,, = 0 . 9 7 ~ ) . Para valores todavía más pequeños de Q, por ejemplo, para Q = 1, prácticamente ya no hay máximo.
Si Q se hace extremadamente grande (es decir, la fr icción muy pequeña), entonces el segundo sumando dentro del radical en (13.91) es muy pequeño compa- rad0 con el valor del primer sumando y, por tanto, R es
Sustituyendo esta cantidad en la ec. (1 3.84) se recu- pera la amplitud A dada por la ec. (13.70). En la figura 13.22 también se muestra la amplitud A cuando Q +
m. Esta gráfica es la misma que la de la figura 13.19. Por otro lado, s i el valor de Q es muy chico (o sea,
una fricción muy grande), vemos que la resonancia deja de tener sentido. Por ejemplo, vemos en la figura 13.22 que en el caso de Q = 1, no hay máximo pro- nunciado de la amplitud A y no tiene sentido hablar de resonancia.
Veamos ahora el significado de las fases e y j. Escri- biremos e en términos de Q. Para ello sustituimos (1 3.90) en (1 3.86), obteniendo
3 - Wo2 1 O W 0 , sen e = - - (1 3.93)
Q R cos e = R
con R dada por la ec. (13.91). S i se dan los valores de Q, w y w0, entonces de las
ecs. (1 3.91), (1 3.84), (1 3.93) y (1 3.88) se pueden obtener los valores de A, e y j correspondientes. Usando ahora las expresiones (13.83) y (1 3.87) se encuentran la posi- ción y la velocidad del cuerpo en el instante que se desee. En las figuras 13.23, 13.24 y 13.25 se muestran
las gráficas así obtenidas de F i t ) , x ( t ) y v(t) para tres valores de la frecuencia externa wo: uno mayor que la frecuencia característica w del sistema, otro menor y otro igual. Se han supuesto los siguientes valores: Q = I O ; para la frecuencia característica w = 5 rad/s, y los valores de wo = 4.5 rad/s, 7 rad/s y 5 rad/s.
Consideremos primero el caso en que wo < w. La fuerza externa oscila con frecuencia wo y tiene su pri- mer máximo en t = O (punto L de la figura 13.234, el segundo máximo en t , = To (punto N), etcétera.
En la gráfica de la figura 13.23b se muestra a x(t). A diferencia de lo que ocurría en el caso semejante a este en la sección anterior, ahora los máximos de x no ocurren en los mismos instantes que los máximos de Fe. En efecto, ahora los máximos de x ocurren en los instantes t,, t3, etc., que no coinciden con t = O, t,, et- cétera.
Por tanto, ahora x y Fe están desfasados. Esto signi- fica que cuando hay fricción la posición no responde inmediatamente a la fuerza externa, sino que tarda cierto tiempo en responder. La ec. (13.83) para x se puede escribir en la forma dada por la ec. (1 3.74b), en
Q = 10 00 = 4.5 rad/s
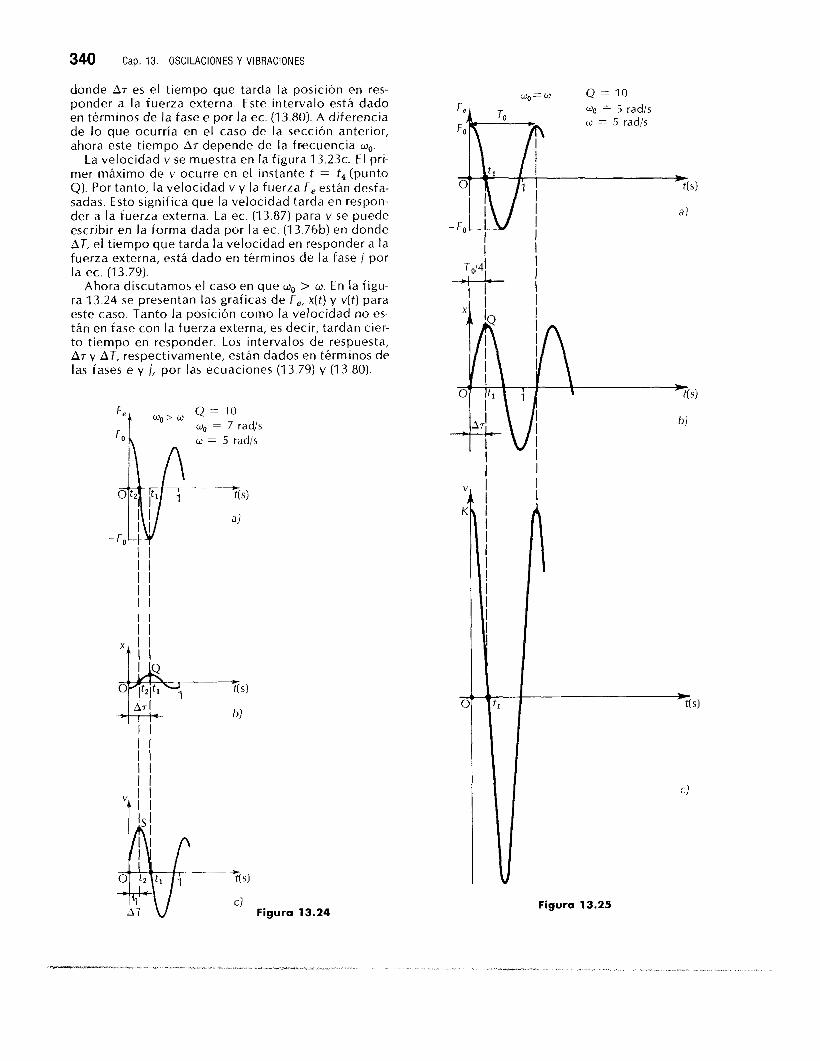
340 Cap. 13. OSCILACIONES Y VIBRACIONES
donde Ar es el t iempo que tarda la posición en res- ponder a la fuerza externa. Este intervalo está dado en términos de la fase e por la ec. (13.80). A diferencia de lo que ocurría en el caso de la sección anterior, ahora este tiempo AT depende de la frecuencia wo.
La velocidad v se muestra en la f igura 13.23~. E l pri- mer máximo de v ocurre en el instante t = t, (punto Q). Por tanto, la velocidad v y la fuerza fe están desfa- %I sadas. Esto significa que la velocidad tarda en respon- der a la fuerza externa. La ec. (13.87) para v se puede escribir en la forma dada por la ec. (1 3.76b) en donde AT, el t iempo que tarda la velocidad en responder a la fuerza externa, está dado en términos de la fase j por la ec. (13.79).
Ahora discutamos el caso en que wo > u. En la f igu- ra 13.24 se pre5entan las graficas de F e , x(t) y v( t ) para este caso. Tanto la posición como la velocidad no es- tán en fase con la fuerza externa, es decir, tardan cier- to tiempo en responder. Los intervalos de respuesta, Ar y AT, respectivamente, están dados en términos de las fases e y j, por las ecuaciones (1 3.79) y (1 3.80).
u o = w Q = 10
O?, = 5 rad/s w = 5 rad/s
al
L
9 s )
bl Q = 10 w, = 7 radls w = 5 rad/s
wg > w
\i
K
¿
I I
Figura 13.25
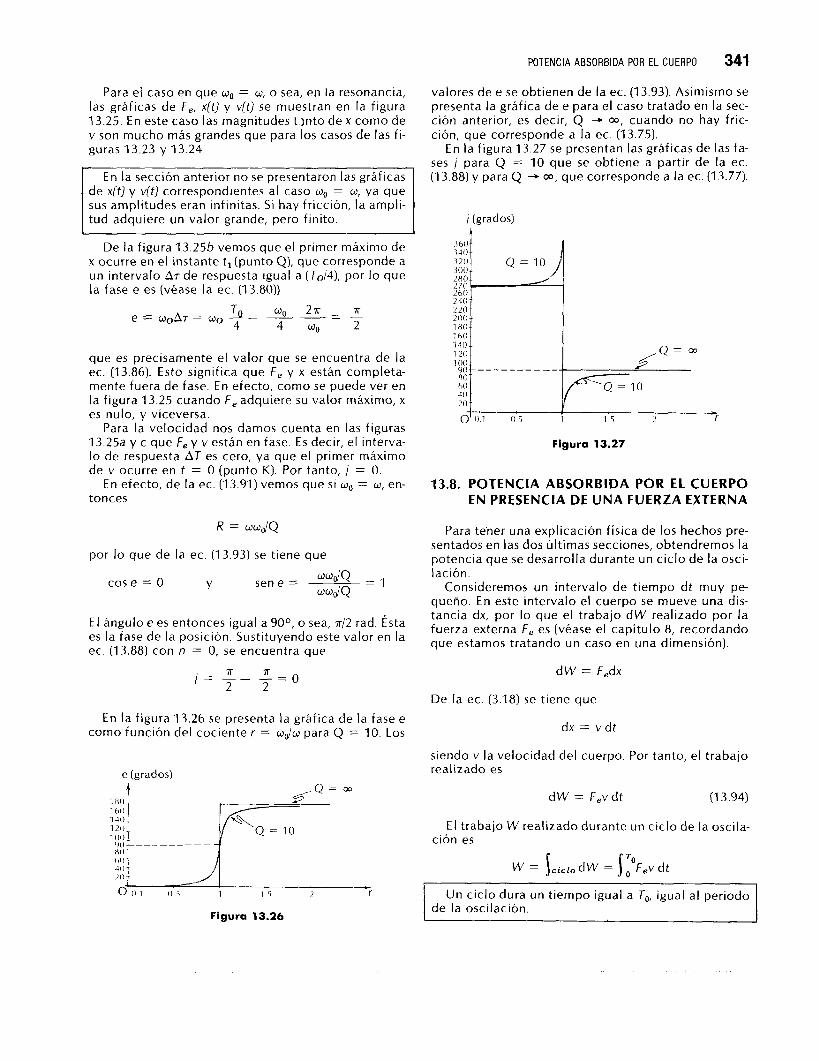
POTENCIA ABSORBIDA POR EL CUERPO 341
Para el caso en que wo = w, o sea, en la resonancia, las gráficas de Fe, x[t) y v[t) se muestran en la figura 13.25. En este caso las magnitudes t.)nto de x como de v son mucho más grandes que para los casos de las fi- guras 13.23 y 13.24.
-1 En la sección anterior no se presentaron las gráficas de x(t) y v[t) correspondientes al caso wo = w, ya que sus amplitudes eran infinitas. Si hay fricción, la ampli- tud adquiere un valor grande, pero finito.
De la figura 13.25b vemos que el primer máximo de x ocurre en el instante t,(punto Q), que corresponde a un intervalo Arde respuesta igual a (To/4), por lo que la fase e es (véase la ec. (13.80))
que es precisamente el valor que se encuentra de la ec. (13.86). Esto significa que F e y x están completa- mente fuera de fase. En efecto, como se puede ver en la figura 13.25 cuando F e adquiere su valor máximo, x es nulo, y viceversa.
Para la velocidad nos damos cuenta en las figuras 13.25a y c que Fe y v están en fase. E s decir, el interva- lo de respuesta AT es cero, ya que el primer máximo de v ocurre en t = O (punto K). Por tanto, j = O.
En efecto, de la ec. (13.91) vemos que s i wo = u, en- tonces
R = wwdQ
por lo que de la ec. (13.93) se tiene que
cos e = O Y sen e = wwdQ = WwdQ
E l ángulo e es entonces igual a 90°, o sea, 7ri2 rad. ÉSta es la fase de la posición. Sustituyendo este valor en la ec. (13.88) con n = O, se encuentra que
En la figura 13.26 se presenta la gráfica de la fase e como función del cociente r = wdw para Q = I O . Los
e (grados)
Figura 13.26
valores de e se obtienen de la ec. (13.93). Asimismo se presenta la gráfica de e para el caso tratado en la sec- ción anterior, es decir, Q + 00, cuando no hay fric- ción, que corresponde a la ec. (13.75).
En la figura 13.27 se presentan las gráficas de las fa- ses j para Q = 10 que se obtiene a partir de la ec. (1 3.88) y para Q -+ m, que corresponde a la ec. (1 3.77).
j (grados) 4
Figura 13.27
13.8. POTENCIA ABSORBIDA POR EL CUERPO EN PRESENCIA DE U N A FUERZA EXTERNA
Para te'ner una explicación física de los hechos pre- sentados en las dos últimas secciones, obtendremos la potencia que se desarrolla durante un ciclo de la osci- lación.
Consideremos un intervalo de tiempo dt muy pe- queño. En este intervalo el cuerpo se mueve una dis- tancia dx, por lo que el trabajo dW realizado por la fuerza externa Fe es (véase el capítulo 8, recordando que estamos tratando un caso en una dimensión).
d W = Fedx
De la ec. (3.18) se tiene que
dx = v d t
siendo v la velocidad del cuerpo. Por tanto, el trabajo realizado es
d W = Fevdt (1 3.94)
E l trabajo W realizado durante un ciclo de la oscila- ción es
Un ciclo dura un t iempo igual a To, igual al periodo de la oscilación.

342 Cap. 13. OSCILACIONES Y VIBRACIONES
En consecuencia, la potencia f desarrollada en el Recordamos que cic lo es (véase la sección 8.5)
P = - = -1 F,vdt w 1 To
To To o (1 3.95) cos (271.) = 1 Y sen (271.) = O 1
p = ~ fd acos; (1 3.96) Obsérvese que en esta expresión aparece la veloci- To
dad y no la posición del cuerpo. En esta expresión tanto A como To depende de w,,. Re-
Para calcular la potencia f, sustituimos ahora en la escribiremos el cociente AIT, como sigue. Para A usa- ec. (1 3.95) las expresiones para Fe y para v dadas en las mos la ec. (1 3.84) y para To usamos (27r/u0) ecs. (1 3.66) y (1 3.87), respectivamente A - aowo - _ -
To R 271. (1 3.97) I T Jo o
P = -S O F o C O S ( W ~ ~ ) ~d COS ( ~ o t - j) dt Ahora, de la ec. (13.93) despejamos (I/R)
1 - R wwg
- - 7 1 , F , w g To cos Iw,t) cos (coot - j) dt " __ Q sene (1 3.98)
Para efectuar la integral se usa la identidad trigono- métrica I1 3.71 1 Pero de la ec. (13.88) se tiene que
To (1 3.99)
Efectuando el producto, y recordando que la fase j que sustituida en la ec. (13.98) nos da no depende del tiempo t, por lo que es una cantidad constante, se tiene que " ~
1 - cos; (1 3.100)
F w g TO Sustituyendo esta ecuación en la ec. (13.971, obtene-
R WW"
P = -2." cos; io cos2 (wet) d t To rnos que
+ sen j S?cos(w,t) sen (w,t) d t 1 Ahora usaremos las siguientes integrales indefini-
das - " aoQ 2 7rw
cos 1
[cos2 (w,t) d t = - sen (wet) cos (wet) + - w,t WO 2 Sustituyendo ahora en la ec. (13.96), obtenemos
para la potencia P Y
s f = for ---"--cosjcosj a Q sen (oat) cos (w,t) d t = - - COS2(W"t) 2 T W
2 wo o sea,
Por tanto, al evaluar las cantidades correspondien- tes entre los límites O y T, se encuentra que
P = Pres cos2 ; con
(1 3.101)
Finalmente, se tiene que
__- - cos2; (1 3.1 02) P res
Pero de 13 ec. (5.611 vemos que la combinación (woTo), que aparece aquí, es justamente igual a 27r, por Este resultado nos indica que ¡a potencia de- lo que sarrollada en un ciclo depende de la fase j entre la
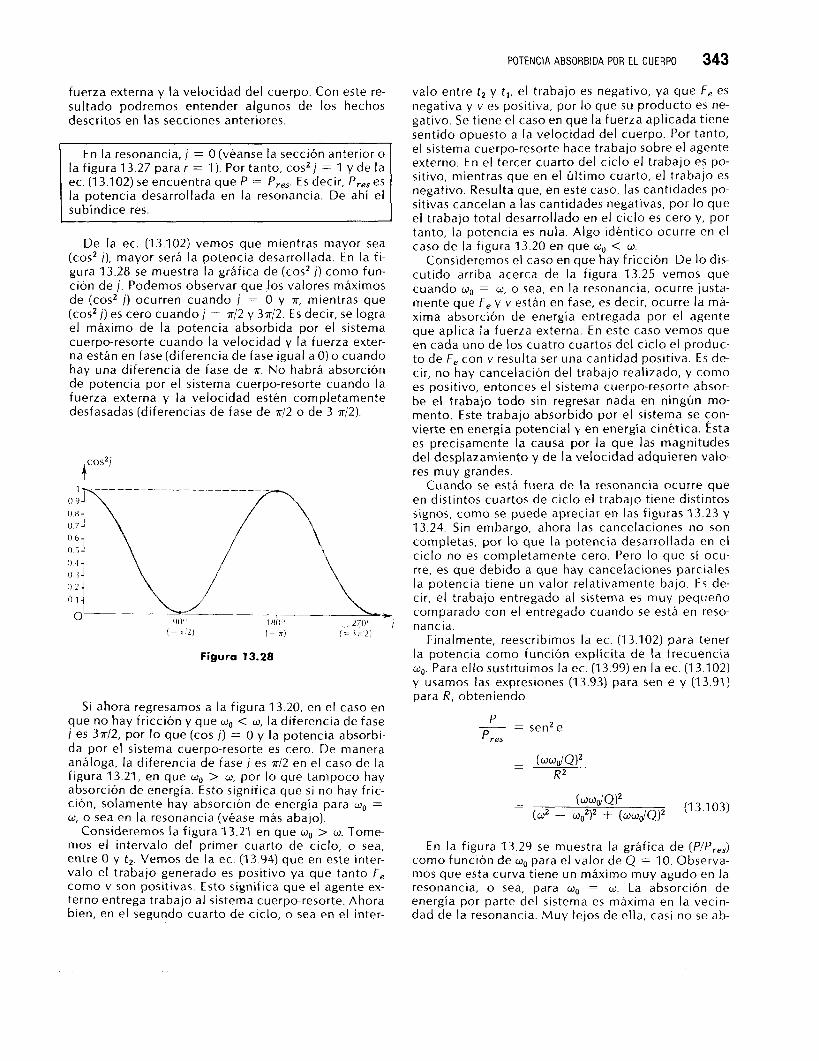
POTENCIA ABSORBIDA POR EL CUERPO 343
fuerza externa y la velocidad del cuerpo. Con este re- valo entre t2 y tl, el trabajo es negativo, ya que Fe es sultado podremos entender algunos de los hechos negativa y v es positiva, por lo que su producto es ne- descritos en las secciones anteriores. gativo. Se tiene el caso en que la fuerza aplicada tiene
sentido oDuesto a la velocidad del cuerpo. Por tanto, En la resonancia, j = O (véanse la sección anterior o
la figura 13.27 para r = 1). Por tanto, cos2j = 1 y de la ec. (13.102) se encuentra que P = Pres. E s decir, Preses la potencia desarrollada en la resonancia. De ahí el subíndice res.
De la ec. (13.102) vemos que mientras mayor sea (cos2 j), mayor será la potencia desarrollada. En la fi- gura 13.28 se muestra la gráfica de (cos2 i ) como fun- ción de j. Podemos observar que ,los valores máximos de (cos2 i ) ocurren cuando i = O y T, mientras que (cos2;) es cero cuando j = ~ / 2 y 3 ~ / 2 . E s decir, se logra el máximo de la potencia absorbida por el sistema cuerpo-resorte cuando la velocidad y la fuerza exter- na están en fase (diferencia de fase igual a O) o cuando hay una diferencia de fase de T. No habrá absorción de potencia por el sistema cuerpo-resorte cuando la fuerza externa y la velocidad estén completamente desfasadas (diferencias de fase de 7r/2 o de 3 7r/2).
f O S Z i
( = x 2 )
Figura 13.28
Si ahora regresamos a la figura 13.20, en el caso en que no hay fricción y que w,, < w, la diferencia de fase i es 3d2, por lo que (cos i ) = O y la potencia absorbi- da por el sistema cuerpo-resorte es cero. De manera análoga, la diferencia de fase j es ~ / 2 en el caso de la figura 13.21, en que wo > w, por lo que tampoco hay absorción de energía. Esto significa que s i no hay fric- ción, solamente hay absorción de energía para wo = w, o sea en la resonancia (véase más abajo).
Consideremos la figura 13.21 en que w,, > w. Tome- mos el intervalo del primer cuarto de ciclo, o sea, entre O y t,. Vemos de la ec. (13.94) que en este inter- valo el trabajo generado es positivo ya que tanto Fe como v son positivas. E s t o significa que el agente ex- terno entrega trabajo al sistema cuerpo-resorte. Ahora bien, en el segundo cuarto de ciclo, o sea en el inter-
el sistema cuerpo-resorte hace trabajo sobre el agente externo. En el tercer cuarto del ciclo el trabajo es po- sitivo, mientras que en el último cuarto, el trabajo es negativo. Resulta que, en este caso, las cantidades po- sitivas cancelan a las cantidades negativas, por lo que el trabajo total desarrollado en el ciclo es cero y, por tanto, la potencia es nula. Algo idéntico ocurre en el caso de la figura 13.20 en que w,, < w.
Consideremos el caso en que hay fricción. D e lo dis- cutido arriba acerca de la figura 13.25 vemos que cuando u,, = w, o sea, en la resondncia, ocurre justa- mente que F e y v están en fase, es decir, ocurre la má- xima absorción de energía entregada por el agente que aplica la fuerza externa. En este caso vemos que en cada uno de los cuatro cuartos del ciclo el produc- to de F e con v resulta ser una cantidad positiva. E s de- cir, no hay cancelación del trabajo realizado, y como es positivo, entonces el sistema cuerpo-resorte absor- be el trabajo todo sin regresar nada en ningún mo- mento. Este trabajo absorbido por el sistema se yon- vierte en energía potencial y en energía cinética. Esta es precisamente la causa por la que las magnitudes del desplazamiento y de la velocidad adquieren valo- res muy grandes.
Cuando se está fuera de la resonancia ocurre que en distintos cuartos de ciclo el trabajo tiene distintos signos, como se puede apreciar en las figuras 13.23 y 13.24. Sin embargo, ahora las cancelaciones no son completas, por lo que la potencia desarrollada en el ciclo no es completamente cero. Pero lo que sí ocu- rre, es que debido a que hay cancelaciones parciales la potencia tiene un valor relativamente bajo. E s de- cir, el trabajo entregado al sistema es muy pequeño comparado con el entregado cuando se está en reso- nancia.
Finalmente, reescribimos la ec. (13.102) para tener la potencia como función explícita de la frecuencia wo. Para ello sustituimos la ec. (13.99) en la ec. (13.102) y usamos las expresiones (13.93) para sen e y (13.91) para R, obteniendo
P - = sen2e P,,,
En la figura 13.29 se muestra la gráfica de (f/fres) como función de o,, para el valor de Q = IO. Observa- mos que esta curva tiene un máximo muy agudo en la resonancia, o sea, para u,, = w. La absorción de energía por parte del sistema es máxima en la vecin- dad de la resonancia. M u y lejos de ella, casi no se ab-
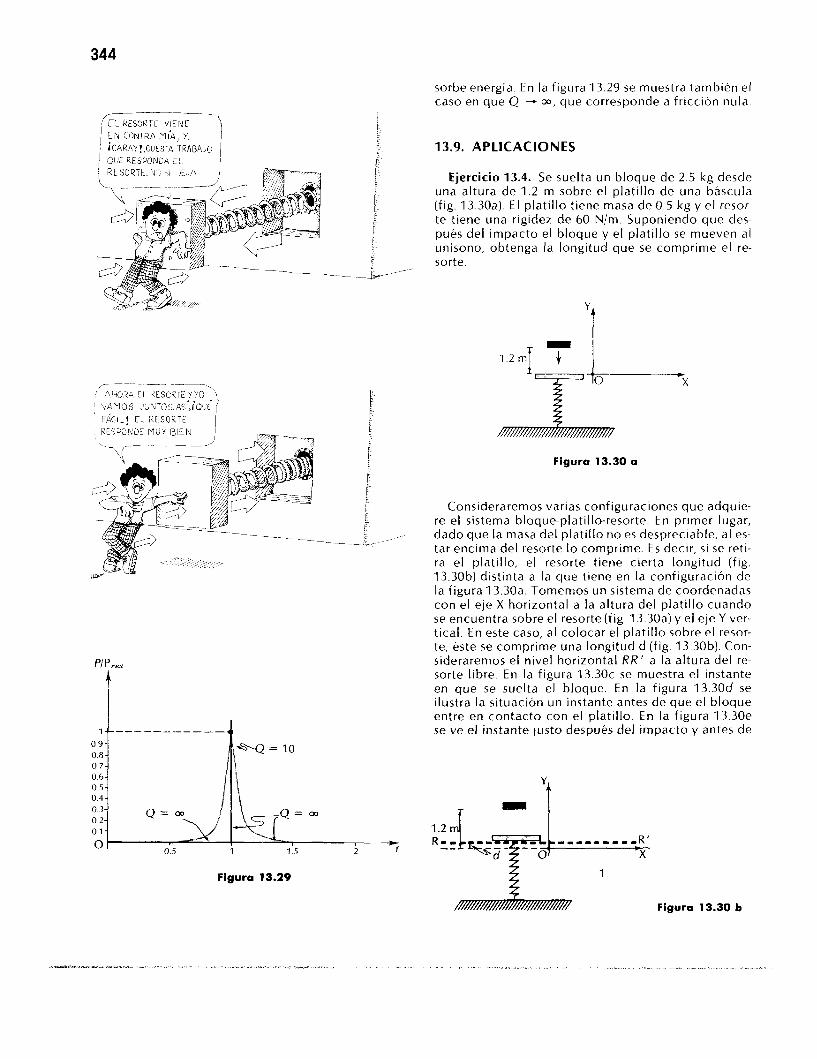
344
sorbe energía. En la figura 13.29 se muestra también el caso en que Q "+ m, que corresponde a fricción nula.
(EL RESOKTE VIENE j !N CONTRA MÍA~ Y ,
~CARAY!,CUESTA TRABAdO OUi RESPONDA iL
"_ ""
PI pres
I J """""_ 4
0 9 0 8
0 6 07
o 5 0.4 0 3 0 2 o 1 O
- I"
Figura 13.29
13.9. APLICACIONES
Ejercicio 13.4. Se suelta un bloque de 2.5 kg desde una altura de 1.2 m sobre el platillo de una báscula (fig. 13.30a). El plat i l lo t iene masa de 0.5 kg y el resor- te tiene una rigidez de 60 Nim. Suponiendo que des- pués del impacto el bloque y el plat i l lo se mueven al unísono, obtenga la longitud que se comprime el re- sorte.
Figura 13.30 a
Consideraremos varias configuraciones que adquie- re el sistema bloque-platillo-resorte. En primer lugar, dado que la masa del plati l lo no es despreciable, al es- tar encima del resorte lo comprime. E s decir, s i se reti- ra el platillo, e l resorte tiene cierta longitud (fig. 13.30b) distinta a la que tiene en la configuración de la figura 13.30a. Tomemos un sistema de coordenadas con el eje X horizontal a la altura del plati l lo cuando se encuentra sobre el resorte (fig. 13.30a) y el eje Y ver- t ical. En este caso, al colocar el platillo sobre el resor- te, éste se comprime una longitud d (fig. 13.30b). Con- sideraremos el nivel horizontal R R ' a la altura del re- sorte libre. En la f igura 13.30~ se muestra el instante en que se suelta el bloque. En la f igura 13.30d se ilustra la situación un instante antes de que el bloque entre en contacto con el platillo. En la figura 13.30e se ve el instante justo después del impacto y antes de
f - 1
Figura 13.30 b
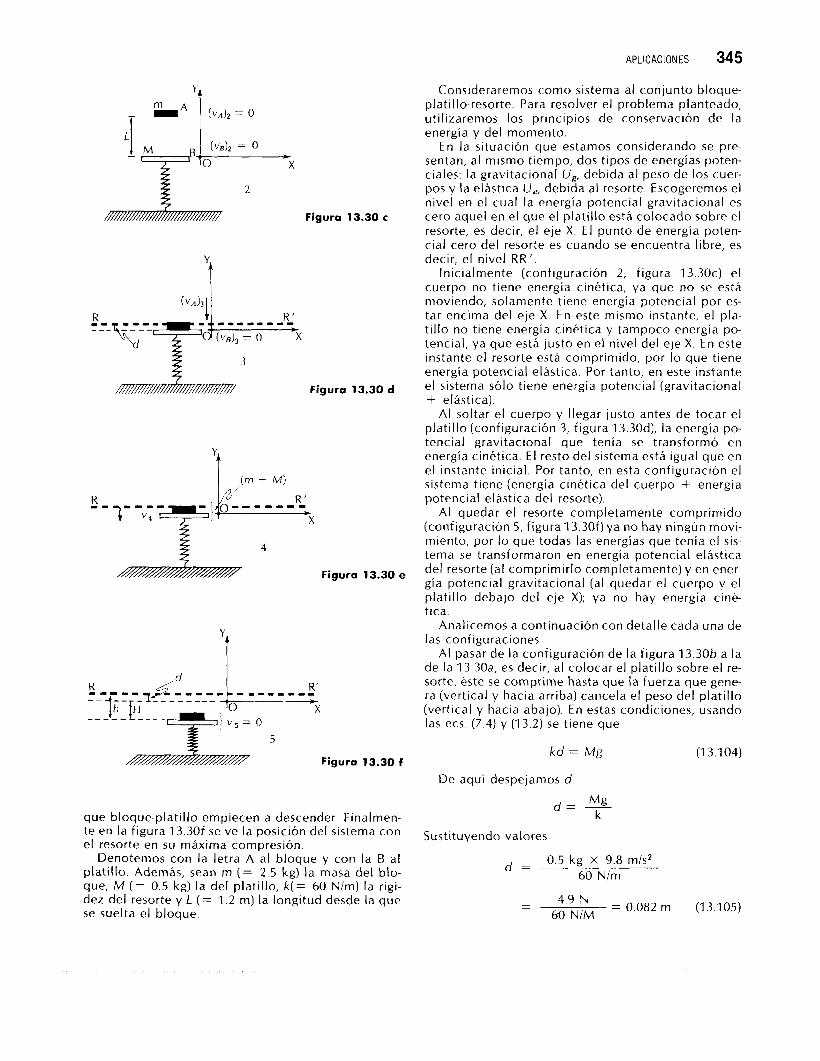
A2 Figura 13.30 c
'i (m + M )
L4 Figura 13.30 e
que bloque-platillo empiecen a descender. Finalmen- te en la figura 13.30f se ve la posición del sistema con el resorte en su máxima compresión.
Denotemos con la letra A al bloque y con la B al p lat i l lo. Además, sean m (= 2.5 kg) la masa del blo- que, M ( = 0.5 kg) la del plati l lo, k(= 60 N/m) la rigi- dez del resorte y L (= 1.2 m) la longitud desde la que se suelta el bloque.
APLICACIONES 345
Consideraremos como sistema al conjunto bloque- platillo-resorte. Para resolver el problema planteado, utilizaremos los principios de conservación de la energía y del momento.
En la situación que estamos considerando se pre- sentan, al mismo tiempo, dos tipos de energías poten- ciales: la gravitacional U,, debida al peso de los cuer- pos y la elástica U,, debida al resorte. Escogeremos el nivel en el cual la energía potencial gravitacional es cero aquel en el que el platillo está colocado sobre el resorte, es decir, el eje X. E l punto de energía poten- cial cero del resorte es cuando se encuentra libre, es decir, el nivel R R ' .
Inicialmente (configuración 2, f igura 13.30~) e l cuerpo no tiene energía cinética, ya que no se está moviendo; solamente tiene energía potencial por es- tar encima del eje X. En este mismo instante, el pla- til lo no tiene energía cinética y tampoco energía PO- tencial, ya que está justo en el nivel del eje X. En este instante el resorte está comprimido, por lo que tiene energía potencial elástica. Por tanto, en este instante el sistema sólo tiene energía potencial (gravitacional + elástica).
AI soltar el cuerpo y llegar justo antes de tocar el plati l lo (configuración 3, figura 13.30d), la energía po- tencial gravitacional que tenía se transformó en energía cinética. E l resto del sistema está igual que en el instante inicial. Por tanto, en esta configuración el sistema tiene (energía cinética del cuerpo + energía potencial elástica del resorte).
A I quedar el resorte completamente comprimido (configuración 5, figura 13.30f) ya no hay ningún movi- miento, por lo que todas las energías que tenía el sis- tema se transformaron en energía potencial elástica del resorte (al comprimirlo completamente) y en ener- gía potencial gravitacional (al quedar el cuerpo y el plat i l lo debajo del eje X); ya no hay energía ciné- tica.
Analicemos a continuación con detalle cada una de las configuraciones.
AI pasar de la configuración de la figura 13.30b a la de la 13 30a, es decir, al colocar el platillo sobre el re- sorte, éste se comprime hasta que la fuerza que gene- ra (vertical y hacia arriba) cancela el peso del platillo (vertical y hacia abajo). En estas condiciones, usando las ecs. (7.4) y (13.2) se tiene que
k d = Mg
De aquí despejamos d
Sustituyendo valores
d = 0.5 kg X 9.8 mis2 60 N/m
(1 3.1 04)
(1 3.1 05)

346 Cap. 13. OSCILACIONES Y VIBRACIONES
Ahora consideremos varias configuraciones. Configuración 2 (f ig. 13.30~). Las velocidades del
bloque (VA), y del plat i l lo (v& son nulas, por lo que la energía cinética total K, también es nula. La energía potencial U, es la suma de las energías potenciales gravitacional y elástica (véanse las ecs. (8.51) y (13.37))
U z = mgL + -kd2 1 2
La energía potencial gravitacional del platillo es cero, ya que se encuentra en el nivel del eje X. Por tanto, la energía total E , es
€2 = K2 + U2
1 2 = mgL + -kd2 (1 3.1 06)
Configuración 3 (fig. 13.30d). E l bloque tiene ahora velocidad ( v ~ ) ~ , mientras que la velocidad del plati l lo ( v ~ ) ~ es cero. Por tanto, la energía cinética K3 es
K3 = m(VA)$ 2
En esta configuración la energía potencial gravita- cional de ambos cuerpos es nula, ya que se encuen- tran justamente sobre el nivel en que es cero. La única energía potencial es la elástica, debida a que el resor- te está comprimido una longitud d por el peso del pla- t i l lo. Por tanto,
1 U3 = T k d 2
En consecuencia, la energía total es
€ 3 = K, + U3
= "(VA): + " k d 2 (13.107) 1 1 2 2
Ahora bien, al pasar el sistema de la configuración 2 a la 3 la energía total se conserva, o sea
E , = E,
que sustituyendo las ecs. (13.106) y (13.107) nos da
De esta ecuación despejamos (va):. Para el lo se can- celan los dos términos iguales (kd2/2), dividimos lo que resta entre m, multiplicamos por 2 y sacamos raíz cuadrada, obteniendo que
En la configuración 3 el momento lineal P, del sistema es la suma de los momentos del bloque y del plati l lo. E l momento del plat i l lo es nulo, ya que su velocidad también lo es. Por tanto, el momento total es sola- mente el momento del bloque, y su magnitud está dada por (véase la ec. (9.5))
P 3 = (PA13 = m(VA)3
= 2.5 kg X 4.85 mis = 12.125 kg x mis (13.109)
Configuración 4 (fig. 13.30e). Ésta corresponde al instante justo después del impacto. Ahora el bloque y el plat i l lo se mueven al unísono, o sea como un cuer- po de masa (M + m) = 3 kg. Sea v, la velocidad que tiene este cuerpo. La magnitud del momento lineal ahora es
P4 = (M + m)v4 (1 3.1 1 O)
Como las únicas Fuerzas que ocurren durante el im- pacto son internas, el momento lineal total se conser- va al pasar e l sistema de la configuración 3 a la 4, o sea
P , = P4
Sustituyendo las ecs. (13.109) y (13.110), obtenemos que
12.125 kg X m/s = (M + m)v4 = 3 kg v4
y despejando v4
v4 = 12.125 kg x m's = 4.04 mis (13.111) 3 kg
La energía cinética K, del sistema es, en este ins- tante,
K4 = -- [M + m)v$ 1 2
= - 3 kg X (4.04 mis)2 = 24.48 I (1 3.11 2) 1 2
La energía potencial gravitacional del sistema es nula. La única energía potencial que no es cero es la elástica debida a que el resorte está comprimido una longitud d
U4 = -kd2 1 2
= " 6 0 N/m) X (0.082 m)2 I
2
= 0.2) (1 3.1 13) Por tanto, la energía total en esta configuración es
€4 = K4 + U4
= 24.48 I + 0.2 1 = 24.68 I (13.114)

APLICACIONES 347
Configuración 5 (fig. 13.30f). En esta configuración el resorte llega a su máxima compresión y el sistema está en reposo. Por tanto, su energía cinética es nula. La energía potencial gravitacional es
U, = - (M + m)gH (I 3.1 15)
Esta cantidad tiene signo negativo, ya que el cuerpo de masa (M + m) se encuentra debajo del eje X, que es el nivel del cero de la energía potencial. Aquí H es la distancia que baja el sistema desde la posición en que el p lat i l lo sólo está en equilibrio (fig. 13.30a).
AI llegar a la configuración 5, el resorte se ha com- primido la longitud
h = (d + H) (13.116)
por lo que la energía potencial elástica es
U, = -kh2 I
2 (1 3.11 7)
Por tanto, la energía total es
€ 5 = u, + u, que sustituyendo las ecs. (13.115) y (13.117) nos da
E , = - (M + m ) g H + -kh2 (13.118) 1 2
La energía total se conserva al pasar el sistema de la configuración 4 a la 5, o sea,
que sustituyendo las ecs. (13.114) y (13.118) y los valo- res numéricos nos da
24.68 I = - 29.4 k g X (m/s2)H - 30 (N/m)h2
Ahora sustituimos h en términos de H, según la ec. (13.116), con el f in de tener una ecuación para una sola incógnita, a saber H. No escribiremos las unida- des; en vista de que estamos trabajando en el SI, el re- sultado final lo obtendremos en m. Así se obtiene que
24.68 = - 29.4H + 30 X (0.082 + H)*
Se usó el valor de d, dado en la ec. (13.105). Usando ahora el teorema del binomio para desarrollar el cuadrado indicado, nos da
30 H2 - 24.5H - 24.48 = O (1 3.1 19)
Para resolver esta ecuación cuadrática en H usa- mos la solución dada en el apéndice I l l con a = 30, b = - 24.5 y c = -24.48
H = 24.5 f 4600.25 + 2 937.6 60
- 24.5 f 59.48 - 60
que nos da las dos raíces
HI = 1.40 m y H2 = - 0.58 m (13.120)
La raíz negativa no tiene sentido para nuestro caso, ya que H es una magnitud y, por tanto, debe ser positi- va. En consecuencia el resultado buscado es la raíz positiva. E s decir, el bloque comprime el resorte, des- de la posición de equilibrio de la báscula (con el pla- t i l lo colocado) una longitud de 1.40 m.
Ejercicio 13.5. Un collarín de masa 10 kg se mueve sin fricción en una barra que forma un ángulo de 400 con la vertical (fig. 13.31a). E l resorte tiene una rigidez de 328 N/m y no está estirado cuando el collarín está en la posición B. Si el collarín se encuentra en la posición C, iqué aceleración experimenta?
0.9 m
24.68 = - 29.4H + 30 X (0.0067 + 0.1633H + Hz)
= - 29.4H + 0.2 + 4.9H + 30H2
Combinando términos semejantes y pasando todos los términos al mismo miembro de la ecuación, se en- cuentra que
Cuando el collarín se encuentra en la posición C el resorte tiene una longitud igual a AC, que es mayor que la longitud de equil ibrio AB. Por tanto, el resorte ejerce una fuerza F (fig. 13.31 b) a lo largo de la línea AC y con sentido de C a A. E l collarín experimentará
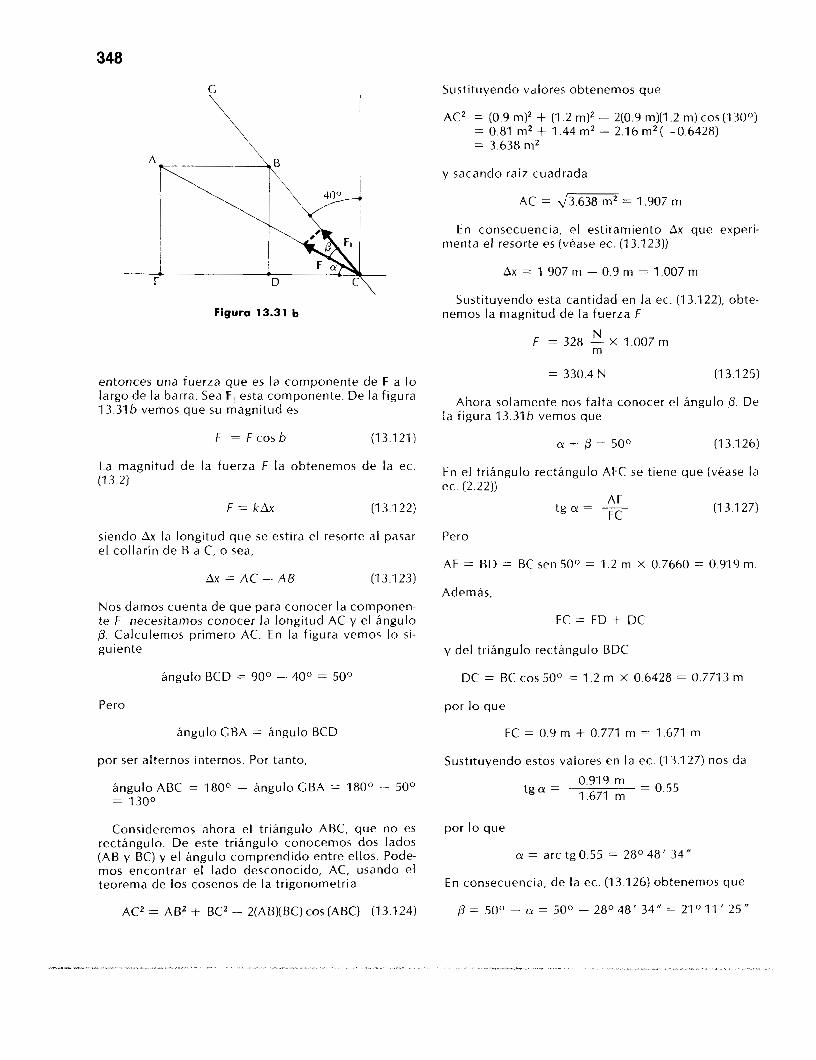
348
c
A
F D C
Figura 13.31 b
entonces una fuerza que es la componente de F a lo largo de la barra. Sea F , esta componente. De la figura 13.31 b vemos que su magnitud es
F = Fcosb (1 3.1 21)
La magnitud de la fuerza F la obtenemos de la ec. (1 3.2)
F = kAx (1 3.1 22)
siendo Ax la longitud que se estira el resorte al pasar el collarín de B a C, o sea,
Sustituyendo valores obtenemos que
AC2 = (0.9 m)2 + (1.2 m)2 - 2(0.9 ml(l.2 m) cos (1 30’) = 0.81 m2 + 1.44 m2 - 2.16 m2(-0.6428) = 3.638 m2
y sacando raíz cuadrada
AC = d m = 1.907 m
En consecuencia, el estiramiento Ax que experi- menta el resorte es (véase ec. (1 3.123))
Ax = 1.907 m - 0.9 m = 1 .O07 m
Sustituyendo esta cantidad en la ec. (13.122), obte- nemos la magnitud de la fuerza F
F = 328 - X 1.007 m N m
= 330.4 N (1 3.1 25)
Ahora solamente nos falta conocer el ángulo 0. De la figura 13.31 b vemos que
a + p = 500 (I 3.1 26)
En el triángulo rectángulo AFC se tiene que (véase la ec. (2.22))
AF FC t g a = __
Pero
(1 3 127)
AF = BD = BC sen SO0 = 1 . 2 m X 0.7660 = 0.919 m. Ax=AC-AAB (I 3.1 23)
Nos damos cuenta de que para conocer la componen- te F , necesitamos conocer la longitud AC y el ángulo 0. Calculemos primero AC. En la figura vemos lo si- guiente
ángulo BCD = 90° - 40” = 50”
Pero
ángulo CBA = ángulo BCD
por ser alternos internos. Por tanto,
ángulo ABC = 180° - ángulo CBA = 180° - 50° = 130°
Consideremos ahora el triángulo ABC, que no es rectángulo. De este triángulo conocemos dos lados (AB y BC) y el ángulo comprendido entre ellos. Pode- mos encontrar el lado desconocido, AC, usando el teorema de los cosenos de la trigonometría
AC2 = AB2 + BC2 - 2(AB)(BC) cos (ABC) (13.124)
Además,
FC = FD + DC
y del triángulo rectángulo BDC
DC = BC cos 50° = 1 . 2 m x 0.6428 = 0.771 3 m
por lo que
FC = 0.9 m + 0.771 m = 1.671 m
Sustituyendo estos valores en la ec. (1 3.1 27) nos da
por lo que
a = arc tg 0.55 = 2 8 O 48’ 34”
En consecuencia, de la ec. (1 3.1 26) obtenemos que
p = SO0 - a = 50° - 28O 48’ 34” = 21° 11 ’ 25”
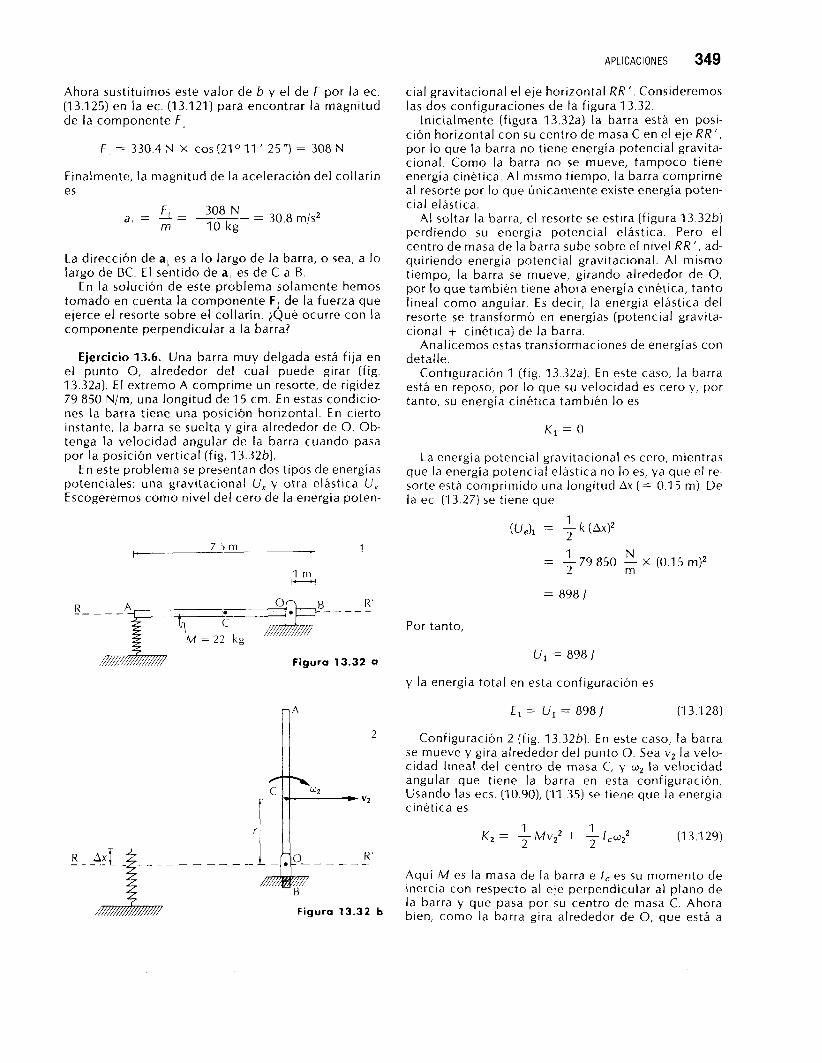
APLICACIONES 349
Ahora sustituimos este valor de b y el de f por la ec. (13.125) en la ec. (1 3.121) para encontrar la magnitud de la componente f ,
F = 330.4N X c 0 s ( 2 1 ~ 1 1 ’ 2 5 ” ) = 308N
Finalmente, la magnitud de la aceleración del collarín es
f 8 a , = - = m 10 kg
308 N = 30.8 mis2
La dirección de a,, es a lo largo de la barra, o sea, a lo largo de BC. E l sentido de a , es de C a B.
En la solución de este problema solamente hemos tomado en cuenta la componente F ; de la fuerza que ejerce el resorte sobre el collarín. iQué ocurre con la componente perpendicular a la barra?
Ejercicio 13.6. Una barra muy delgada está fija en el punto O, alrededor del cual puede girar (fig. 13.32a). E l extremo A comprime un resorte, de rigidez 79 850 N/m, una longitud de 15 cm. En estas condicio- nes la barra tiene una posición horizontal. En cierto instante, la barra se suelta y gira alrededor de O. Ob- tenga la velocidad angular de la barra cuando pasa por la posición vertical (fig. 13.32b).
En este problema se presentan dos tipos de energías potenciales: una gravitacional U , y otra elástica U, Escogeremos como nivel del cero de la energía poten-
7 i m t- -i 1
i”--1 I r n
R R’ ”_” 0
II C
_””
M = 22 kg - Figura 13.32 a
Figura 13.32 b
cia1 gravitacional el eje horizontal R R ’ . Consideremos las dos configuraciones de la figura 13.32.
Inicialmente (figura 13.32a) la barra está en posi- ción horizontal con su centro de masa C en el eje RR’ , por lo que la barra no tiene energía potencial gravita- cional. Como la barra no se mueve, tampoco tiene energía cinética. AI mismo tiempo, la barra comprime al resorte por lo que únicamente existe energía poten- cial elástica.
AI soltar la barra, el resorte se estira (figura 13.32b) perdiendo su energía potencial elástica. Pero el centro de masa de la barra sube sobre el nivel RR’ , ad- quiriendo energía potencial gravitacional. AI mismo tiempo, la barra se mueve, girando alrededor de O, por lo que también tiene ahora energía cinética, tanto lineal como angular. E s decir, la energía elástica del resorte se transformó en energías (potencial gravita- cional + cinética) de la barra.
Analicemos estas transformaciones de energías con detalle.
Configuración 1 (fig. 13.32a). En este caso, la barra está en reposo, por lo que su velocidad es cero y, por tanto, su energía cinética también lo es
K1 = O
La energía potencial gravitacional es cero, mientras que la energía potencial elástica no lo es, ya que el re- sorte está comprimido una longitud Ax (= 0.1 5 m). De la ec. (1 3.27) se tiene que
(U& = k (Ax)’ 1
1 N 2 = - 79 850 m X (0.1 5 m)2
For tanto,
U1 = 898)
y la energía total en esta configuración es
€1 U1 = 898) (1 3.1 28)
Configuración 2 (fig. 13.32b). En este caso, la barra se mueve y gira alrededor del punto O. Sea v2 la velo- cidad lineal del centro de masa C, y w2 la velocidad angular que tiene la barra en esta configuración. Usando las ecs. (10.90), (11.35) se tiene que la energía cinética es
1 1 K2 = - Mv,‘ + - lCw2’ 2 2 (1 3.1 29)
Aquí M es la masa de la barra e I, es su momento de inercia con respecto al eje perpendicular al plano de la barra y que pasa por su centro de masa C. Ahora bien, como la barra gira alrededor de O, que está a

350 Cap. 13. OSCILACIONES Y VIBRACIONES
una distancia r ( = 2.75 m) de C, de la ec. (11 . I ) se tiene que
v2 = rw2
Sustituyendo esta cantidad en la ec. (1 3.1 29), obtene- mos para la energía cinética
1 Kz = - M r 2 wZ2 + -/, coz2 1
2 2
= - (Mr2 + /,)wz2 1 2 (1 3.1 30)
E l momento de inercia de la barra con respecto al eje perpendicular al plano de la barra y que pasa por su centro de masa lo calculamos usando la ec. (11.52), despreciando uno de los lados
1 I , = -ML2 1 2
- -~ 1 2 22 kg X (7.5 m)2 = 103.1 kg X m2
Sustituyendo valores en la ec. (13.130), obtenemos que
1 2 K2 = -122 kg X (2.75 m)2 + 103.1 kg X m*] wZ2
= 134.7 u 2 2 (1 3.1 31)
Las cantidades están expresadas en el SI. En la configuración 2 no hay energía potencial elás-
tica, ya que el resorte no se está comprimiendo. La única energía potencial que hay es la gravitacional debido a que el centro de masa C de la barra está en- cima del eje RR'. Por tanto
U2 = (U& = M g r = 22 k g X 9.8jmls2) X 2.75 m
= 592.9)
En consecuencia, la energía total es
€ 2 = K 2 + U2
= 134.7 wZ2 + 592.9 (13.132)
En vista de que la energía total se conserva
E, = E,
Sustituyendo las ecs. (13.128) y (13.132). obtenemos clue
898 = 592.9 + 134.7 w22
Despejamos de aquí coz2
134.7 = 898 - 592.9 = 305.1
. ~ ~ ~ ~ ~ " , , ~ " ~ ~ " ~ " ~ . . " ~ . .' " . . .. ~ x ." ~ . . __ ...~~,. , , ., . . .
Y
Sacando raíz cuadrada, obtenemos que
w2 = 1.51 radis
En este caso, al pasar la barra de la configuración 1 a la 2, la energía potencial elástica del resorte compri- mido se transformó en energía cinética (tanto lineal como angular) más energía potencial gravitacional.
Ejercicio 13.7. Un cañón se diseña de manera que, al dispararlo, el tubo retrocede contra un resorte que lo regresa a su posición inicial. Al f inal del retro- ceso hay un mecanismo amortiguador para que el tubo regrese en el mínimo tiempo posible y sin que haya os- cilación. iQué valor debe tener la constante de amor- tiguamiento c (véase la ec. (13.54)) para un tubo que pesa 1 700 kg y un resorte de rigidez 16 700 N/m?
Para que el tubo regrese a su posición inicial en el mínimo tiempo posible y sin oscilación, el mecanismo debe estar diseñado para que haya amortiguamiento crítico. En este caso la constante q debe ser igual a la frecuencia característica del sistema tubo-resorte.
q = w
De la ec. (13.57) despejamos c
c = q ' m = 2wrn
y usando la ec. (13.9) se tiene que
c = 2 m G = a
Sustituyendo valores, se obtiene N 16700 m X 1700kg
= 10 656 kgis
Ejercicio 13.8. E l disco de radio r = 0.8 cm mostra- do en la figura 13.33 gira con velocidad angular wo. E l disco está unido por medio de una biela a un extremo de un cuerpo de masa 1 .3 kg. Este cuerpo está unido en su extremo opuesto a un resorte de rigidez 42 Nlm. Obtenga las amplitudes de las oscilaciones del cuer- po cuando wo = 6 radls y 7.1 radls.
En este ejemplo el disco, a través de la biela y la barra, imprime al cuerpo una fuerza externa. E s claro que esta fuerza es periódica, con la misma frecuencia con la que gira el disco. Por tanto, se trata del movi- miento del sistema cuerpo-resorte en presencia de una fuerza externa periódica.
En primer lugar calcularemos la frecuencia angular
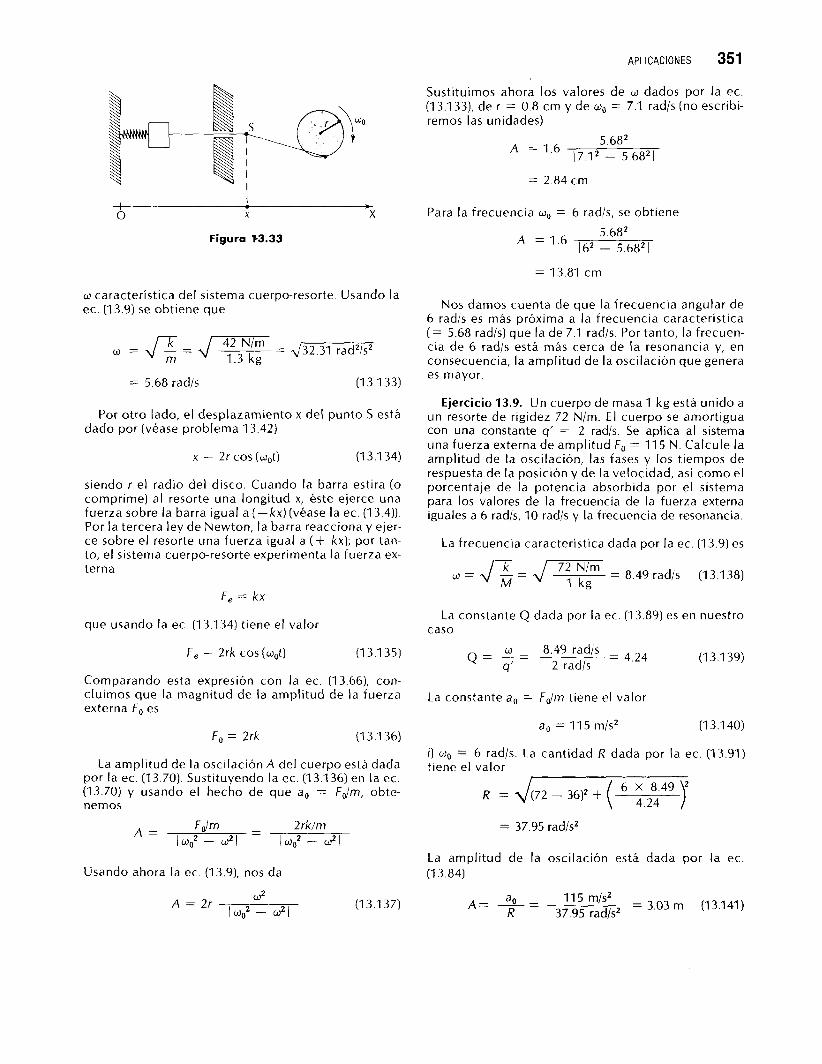
APLICACIONES 351
O
I * O X X
Figura 13.33
o característica del sistema cuerpo-resorte. Usando la ec. (1 3.9) se obtiene que
w = pG = J- = J32.31 rad2/s2 1.3 kg
= 5.68 radis (1 3.1 33)
Por otro lado, el desplazamiento x del punto S está dado por (véase problema 13.42)
x = 2r cos(w,t) (1 3.1 34)
siendo r el radio del disco. Cuando la barra estira (o comprime) al resorte una longitud x, este ejerce una fuerza sobre la barra igual a (-kx) (véase la ec. (13.4)). Por la tercera ley de Newton, la barra reacciona y ejer- ce sobre el resorte una fuerza igual a (+ kx); por tan- to, el sistema cuerpo-resorte experimenta la fuerza ex- terna
Fe = kx
que usando la ec. (13.134) tiene el valor
F e = 2rk cos (w,t) (1 3.1 35)
Comparando esta expresión con la ec. (13.66), con- cluimos que la magnitud de la amplitud de la fuerza externa F, es
F , = 2rk (1 3.1 36)
La amplitud de la oscilación A del cuerpo está dada por la ec. (1 3.70). Sustituyendo la ec. (1 3.1 36) en la ec. (13.70) y usando el hecho de que a , = Fdm, obte- nemos
A = Fdm = 2rk/m I wo2 - w2 I Iw; - 0 2 1
Usando ahora la ec. (13.9), nos da
A = 2r 0 2
l w 2 - u21 (1 3.1 37)
Sustituimos ahora los valores de w dados por la ec. (13.133), de r = 0.8 cm y de wo = 7.1 rad/s (no escribi- remos las unidades)
A = 1.6 5.6B2 17.1’ - 5.68’1
= 2.84 cm
Para la frecuencia w, = 6 radis, se obtiene
A = 1 . 6 5.6B2 16’ - 5.68’1
= 13.81 cm
Nos damos cuenta de que la frecuencia angular de 6 rad/s es más próxima a la frecuencia característica ( = 5.68 radis) que la de 7.1 radis. Por tanto, la frecuen- cia de 6 radls está más cerca de la resonancia y, en consecuencia, la amplitud de la oscilación que genera es mayor.
Ejercicio 13.9. Un cuerpo de masa 1 kg está unido a un resorte de rigidez 72 N/m. E l cuerpo se amortigua con una constante q’ = 2 rad/s. Se aplica al sistema una fuerza externa de amplitud F, = 1 1 5 N. Calcule la amplitud de la oscilación, las fases y los tiempos de respuesta de la posición y de la velocidad, así como el porcentaje de la potencia absorbida por el sistema para los valores de la frecuencia de la fuerza externa iguales a 6 rad/s, 10 radis y la frecuencia de resonancia.
La frecuencia característica dada por la ec. (1 3.9) es
w = c& = 4- = 8.49 radis (13.138) 1 k g
La constante Q dada por la ec. (1 3.89) es en nuestro caso
Q = ”= w 8.49 radls = 4,24 q’ 2 rad/s (1 3.1 39)
La constante a , = Fdm tiene el valor
a , = 11 5 mis2 (1 3.1 40)
i ) wo = 6 radls. La cantidad R dada por la ec. (13.91) tiene el valor
R = d ( 7 2 - 36)2 + ( 4,24 7 6 X 8.49
= 37.95 radls’
La amplitud de la oscilación está dada por la ec. (1 3.84)
A = ”= R 37.95 rad/s2 ’I5 m’s2 = 3.03 m (13.141)

352 Cap. 13. OSCILACIONES Y VIBRACIONES
La fase e de la posición es tal que (véase la ec. (13.93)) P " - cosz j =(cos 288O 27'12 = (0.3165)2 = 0.1
8.4g2 - 62 - cos e = 36 = 0.9486 37 95 37.95
8.49 X 614.24 _ _
Pi-,, "
Por tanto, el porcentaje de la potencia absorbida es sen e = -
37.95 ( P / P r e s ) x 100 = 10%
e = 1 8 O 27'
De la ec. (13.88) obtenemos la fase j de la velocidad /? = 4 7 2 - + ( 8'49 x '2)' = 34.42 rad/sz
4.24 (con n = 1)
j = 27r + e - -- = 360° + 18O 27' - 90° = 288O 27' c,6n T
I-" De l a ec. (1 3.84) se tiene para la amplitud de la osciia-
2 a 11 5 R 14.42 En la ec. (1 3.88) se escoge el valor de n de tal forma
que j tenga el mínimo valor positivo. En el caso que
= O daría un valor negativo para j .
A = -0 = -__ = 3 34n1 (13.142)
estamos tratando, esto corresponde a n = 1 , Ya que n Para la fase e de ia oscilación usamos la ec. (13.93)
72 - 100 34.42 cos e = - = - 0.8135
expresado los ángulos en radianes, mientras que en el segundo término lo han sido en grados. Recuérdese Y
8.49 X 1014.24 - o,5817 sen e = 34.42 "
Para calcular los tiempos de respuesta, tanto de la posición como de la velocidad, usaremos las ecs. Como el seno de e es positivo y su coseno es negati- (1 3.80) Y (1 3.79) En estas ecuaciones, las fases e Y / de- vo, e está en el segundo cuadrante. E l valor de e es ben estar expresadas en radianes, SI la frecuencia an- gular uo está expresada en (radlseg). La transforma- e = 144O 26' ción de grados a radianes se hace multiplicando por (27r/360), por lo que Para la fase j de ia velocidad usamos la ec. (1 3.88) con
n = O e = 18" 27' x (2~ /360) = 0.3221 rad
= e - - 1440 26' - 900 540 26' 7
Y 2
j = 2 8 8 O 27' X (2~ /360) = 5.0345 rad Aquí se usó n = 0 que da el mínimo valor de j posi- two. Si se usara n = I , la ec. (13.86) daría un valor de j
Por tanto, de la ec. (13.80) encontramos que el tiem- positivo, pero mayor que el de arriba. PO de respuesta Arde la pos ic ión es
Expresados en radianes, estos ángulos son,
e = 144O 26' X ( 2 ~ / 3 6 0 ) = 2.5209 rad
De la ec. (1 3.79) obtenemos que el tiempo de respues- y ta AT de la velocidad es
j = 54O 26' X (2n/360) = 0.9501 rad
E l tiempo de respuesta AT de la posición es (ec. (1 3.80))
De la ec. (13.102) obtenemos la potencia absorbida A T = " e - 2.5209 rad - o,252 s por el sistema cuerpo-resorte
___ " m0 1 0 radls

OTROS SISTEMAS QUE VIBRAN 353
E l tiempo de respuesta AT de la velocidad es (ec. (1 3.79))
A T = - _ j - 0.9501 rad = o.o95 u0 10 radls
Para la potencia absorbida usamos la ec. (13.102) P
pres __ = COS' j = (COS 54' 26')' = (0,5816)' = 0.338
En consecuencia, el porcentaje de la potencia absor- bida es
(P/Pres) X 100 = 33.8%
i i i) En la resonancia wo = w = 8.49 radis, según se ve en la ec. (13.138). En este caso, de la ec. (13.91) se tiene para R
R = 4 I w ~ d Q ) ~ = (wwO/Q) = (8.49 x 8.49/4.24) = 17
Por tanto, la amplitud de la oscilación es, de la ec. (1 3.84)
A = -- = 6.76 m (13.143) I1 5 17
Para la fase e usamos la ec. (13.93)
cos e = - 0 wz - u; - R
ya que wo = w,
u21Q - 8.49'14.24 - sen e = __ - -" R 17 17
17 - 1
E l ángulo e que satisface estas ecuaciones es de 90° (o TI2 1
e = 900
Para la fase j de la velocidad usamos la ec. (13.88) con n = O
7r / = e - - = 2 900 - goo = oo
Esto es precisamente Io que ocurre en la resonancia: la posición tiene una diferencia de fase con respecto a la fuerza externa de 90°, mientras que la velocidad y la fuerza externa están en fase (véase fig. 13.25).
Las fases obtenidas son, en radianes,
e = ~ / 2 = 1.5708 rad
Y
j = O rad
E l t iempo de respuesta de la posición es
En este caso, el periodo To de la fuerza externa es
2* - T o = " 6.2832 rad = o,74 U 0 8.49 rad/s
por lo que
Es decir,
AT = 0.25 To = Td4
que es precisamente lo que se muestra en la figura 13.25b.
Para la velocidad, el tiempo de respuesta es
A T = -- i - o *O
La velocidad responde inmediatamente a la fuerza ex- terna (véase fig. 13.25~).
Usando la ec. (1 3.102) se encuentra que la potencia absorbida es
P
Pres " - cos'; = (cos00)2 = 1
por lo que el porcentaje de la potencia absorbida es
(P/Pres) x 100 = 100%
Los resultados que acabamos de obtener nos ilus- tran el hecho de que fuera de la resonancia (casos i ) y ii)) las amplitudes de la oscilación (3.03 m y 3.34 m) son bastante menores que cuando se está en resonan- cia (caso i i i ) ) , en cuyo caso tiene un valor de 6.76 m. Además, vemos que fuera de la resonancia las poten- cias absorbidas son muy pequeñas, mientras que en la resonancia la potencia es de 100%. En la resonancia se absorbe toda la energid que entrega el agente ex- terno que ejerce la fuerza. Esto ul t imo se debe a que, en la resonancia, la fuerza externa y la velocidad estan justamente en fase (j = O), mientras que fuera de la re- sonancia hay diferencias de fase entre estas cantida- des, que tiene como consecuencia que la energía no se absorba eficazmente.
13.10. OTROS SISTEMAS QUE VIBRAN
Hasta este momento hemos estudiado en este capí- tu lo un solo sistema que vibra, a saber, un cuerpo uni-
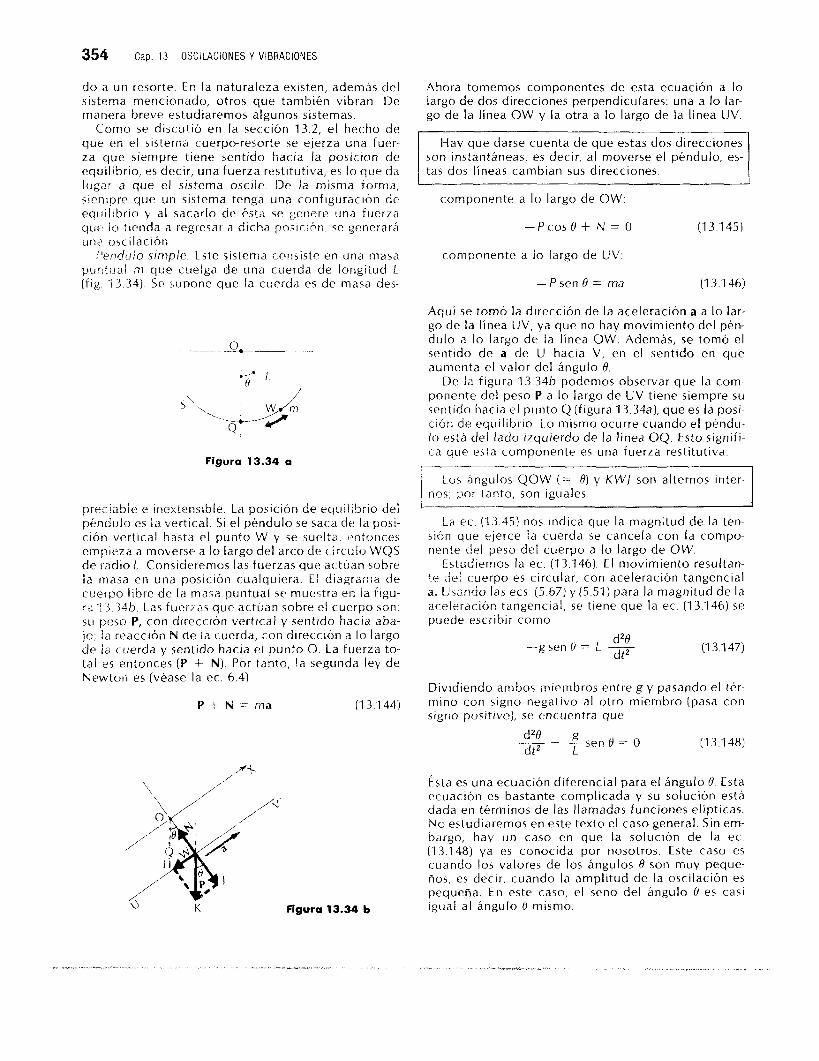
3 Cap. 13 OSCiLACiONES Y VIBRACIONES
do a un resorte En la naturaleza existen, además del sistema mencionado, otros que también vibran. De manera breve estudiaremos algunos sistemas.
Como se discutió en la sección 13.2, el hecho de que en e ! sistema cuerpo-resorte se ejerza una fuer- za que siempre tiene sentido hacia la posicion de equilibrio, es decir, una fuerza restitutiva, es lo que da lugar a que el sistema oscile De la misma forma, Giempre que un sistema tenga una Configuración de equilibrio y al sacarlo de esta se gerlew una fuerza que I o tienda a regresar a dicha pmic ihn , se generará una oscilacihn.
k d g l o sirnpie. Este sistema consiste en und masa puntuai m que cuelga de una cuerda de longitud L [f ig. 13 34) Se :,uDone que la cuerda es de masa des-
Figura 13.34 Q
prc1::Iabie e inextenstble. La posición de equilibrio del pPnduio es la vertical. S i el péndulo se saca de la posi- ción vertical hasta el punto W y se susl:a entonces empieza a moverse a lo largo del arco de c i r c u l o W Q S de radio L . Consideremos las fuerzas que a c t b a n sobre la masa en una posición cualquiera. E l diagrama de cuerpo libre de la masa puntual se muestra en la figu- ra 11.34b. Las fuerzas qae actúan sobre el cuerpo son: SLI peso P, con dirección vertical y sentido hacia aba- jo; la reacción N de la cuerda, con dirección a lo largo de la cuerda y sentido hacia el punto O. La fuerza to- tal es entonces (P + N). Por tanto, la segunda ley de Newton es (véase la ec. 6.4)
P i F\i - - ma (1 3 .I 44)
Ahora tomemos componentes de esta ecuación a lo largo de dos direcciones perpendiculares: una a l o lar- go de la línea OW y la otra a lo largo de la linea UV.
Hay que darse cuenta de que estas dos direcciones SOR instantáneas, es decir, al moverse el péndulo, es- tas dos lineas cambian sus direcciones.
componente a lo largo de OW:
" p c o s 0 + N = o (I 3 .I 45)
componente a lo largo de UV:
-. P sen B = ma (1 3.1 46)
Aquí se tomó la dirección de la aceleración a a lo lar- go de la línea UV, ya que no hay movimiento del pén- dulo a Io largo de la linea OW. Además, se tomó el sentido de a de U hacia V, en el sentido en que aumenta el valor del ángulo 0.
De la figura 13.346 podemos observar que la com- ponente del peso P a lo largo de UV tiene siempre su sentido hacia el punto Q (figura 13.34a), que es la posi- c i6n de equil ibrio Lo mismo ocurre cuando el péndu- l o está del lado izquierdo de la línea OQ. Esto signifi- ca que esta componente es una fuerza restitutiva.
I". ¡.o\ ángulos QOW ( = 0) y KWI son alternos inter- w s . Flor tanto, son iguales.
La ec. (13.45) nos indica que la magnitud de la ten- sibn que ejerce la cuerda se cancela con la compo- nente d e l peso del cuerpo a lo largo de OW.
Estudiemos la ec. (13 146). E l movimiento resultan- te riel cuerpo es circular, con aceleración tangencial a. Usnncio las ecs. (5.67) y (5.51) para la magnitud de l a aceleración tangencial, se tiene que la ec. (13.146) se puede escribir como
d20 --g sen 0 = L - dt2 (1 3.1 47)
Dividiendo ambos miembros entre g y pasando el tér- mino con signo negativo al otro miembro (pasa con signo positivo), se encuentra que
d28 ,q dt2 L __ + --sen 0 = O (1 3.1 48)
fl" /'
\, Ésta es una ecuación diferencial para el ángulo 0. Esta ecuación es bastante complicada y su solución está dada en términos de las llamadas funciones elípticas. No estudiaremos en este texto el caso general. Sin em- bargo, hay un caso en que la solucibn de la ec. (13.148) ya es conocida por nosotros. Este caso es cuando los valores de los ángulos 8 son muy peque- ños, es decir, cuando la amplitud de la oscilación es pequeña En este caso, el seno del ángulo 0 es casi
Figura 13.34 b igual al ángulo 0 mismo.
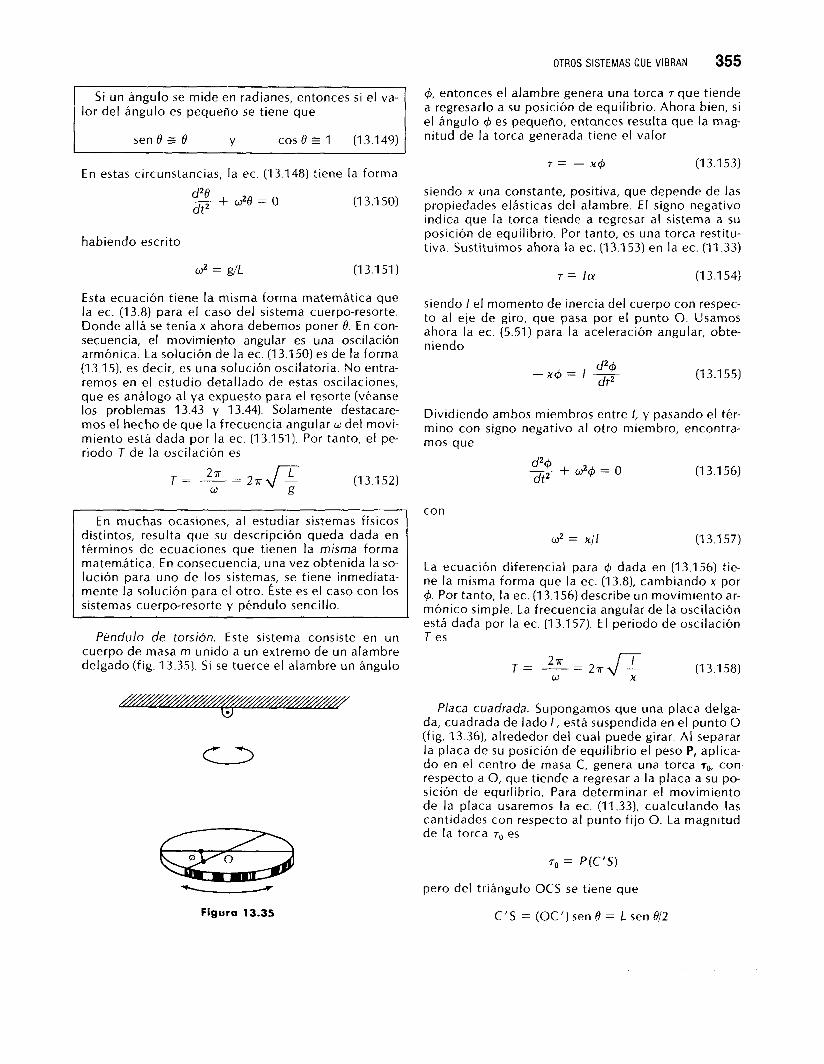
En estas circunstancias, la ec. (13.148) tiene la forma
d28 + = 0 dt2
(1 3.1 50)
habiendo escrito
a2 = dl (1 3.1 51 )
Esta ecuación t iene la misma forma matemática que la ec. (13.8) para el caso del sistema cuerpo-resorte. Donde allá se tenia x ahora debemos poner 8. En con- secuencia, el movimiento angular es una oscilación armónica. La solución de la ec. (1 3.1 50) es de la forma (13.15), es decir, es una solución oscilatoria. No entra- remos en el estudio detallado de estas oscilaciones, que es análogo al ya expuesto para el resorte (véanse los problemas 13.43 y 13.44). Solamente destacare- mos el hecho de que la frecuencia angular w del movi- miento está dada por la ec. (13.151). Por tanto, el pe- riodo T de la oscilación es
En muchas ocasiones, al estudiar sistemas físicos distintos, resulta que su descripción queda dada en términos de ecuaciones que tienen la misma forma matemática. En consecuencia, una vez obtenida la so- lución para uno de los sistemas, se tiene inmediata- mente la solución para el otro. Este es el caso con los sistemas cuerpo-resorte y péndulo sencillo.
Péndulo de torsión. Este sistema consiste en un cuerpo de masa m unido a un extremo de un alambre delgado (fig. 13.35). Si se tuerce el alambre un ángulo
OTROS SISTEMAS QUE VIBRAN 355
$, entonces el alambre genera una torca 7 que tiende a regresarlo a su posición de equilibrio. Ahora bien, s i el ángulo $ es pequeño, entances resulta que la mag- nitud de la torca generada tiene el valor
7 = - x $ (1 3.1 53)
siendo x una constante, positiva, que depende de las propiedades elásticas del alambre. E l signo negativo indica que la torca t iende a regresar al sistema a su posición de equilibrio. Por tanto, es una torca restitu- tiva. Sustituimos ahora la ec. ( I 3.1 53) en la ec. (11.33)
r = ICY (1 3.1 54)
siendo I el momento de inercia del cuerpo con respec- to al eje de giro, que pasa por el punto O. Usamos ahora la ec. (5.51) para la aceleración angular, obte- niendo
d2$ -x$ = I - dt2 (1 3.1 55)
Dividiendo ambos miembros entre I, y pasando el tér- mino con signo negativo al otro miembro, encontra- mos que
5% + w2@ = 0 dt2 (1 3.1 56)
con
0 2 = x// (1 3.1 57)
La ecuación diferencial para $ dada en (13.156) tie- ne la misma forma que la ec. (13.8), cambiando x por 4. Por tanto, la ec. (13.156) describe un movimiento ar- mónico simple. La frecuencia angular de la oscilación está dada por la ec. (13.157). E l periodo de oscilación T es
T = ” 2* - 2 4 (1 3.1 58) w
Placa cuadrada. Supongamos que una placa delga- da, cuadrada de lado 1, está suspendida en el punto O (fig. 13.36), alrededor del cual puede girar. AI separar la placa de su posición de equilibrio el peso P, aplica- do en el centro de masa C, genera una torca T ~ , con- respecto a O, que tiende a regresar a la placa a su po- sición de equilibrio. Para determinar el movimiento de la placa usaremos la ec. (11.33), cualculando las cantidades con respecto al punto fijo O. La magnitud de la torca r0 es
To = f (C’S)
pero del triángulo OCS se tiene que
C’S = (OC’) sen 8 = L sen 0/2

356
Figura 13.36
ya que O C = OC’ = L/2. Por tanto
70 = mgL sen 0/2 (1 3.1 59)
Por otro lado, el momento de inercia io con respec- t o al eje de giro, que pasa por el punto O lo podemos obtener usando el teorema de ejes paralelos dado por la ec. !11.65)
I , = IC + m(OC ‘12 (1 3.1 60)
E l momento de inercia de la placa con respecto a su centro de masa C es (véase la ec. (11.52) con a = b = L )
IC = -m(L2 + L2) = -mL2 (13.161) I I
12 6
Además, como (OC’) = L/2 , la ec. (1 3.160) queda como
I, = - m í 2 + m 1 6
= “ m L Z + I 6
- mL2 1 4
- ”
12 mL2 (1 3 .I 62)
Usando ahora las ecs. (13.1591, (13.162) y (5.51) en la ec. (11.33), encontramos que
Se usó el.hecho de que la torca tiene sentido opues- to al sentido en el cual aumenta el ángulo. Debido a esto aparece el signo negativo en e l miembro derecho de la últ ima ecuación.
Dividiendo ambos miembros entre (5mL2/12) y pasan- do el término negativo al otro miembro se encuentra que
siendo
(1 3.1 63)
( I 3.1 64)
L.a e(:. (13.163) tiene la misma forma matemática que l a ec. (13.148). S i la amplitud de la oscilación es pequeña, entonces, podemos reemplazdr e l seno del ángulo 6’ por el angulo 6’ (véase ec. (13.149)) obte- niendo
(1 3 .I 65)
Esta ecuación tiene la misma forma que la ec. (13.150). Por tanto, la placa oscila armónicamente alrededor del punto O con una frecuencia angular w dada por la ec. (13.1641. E l periodo T de oscilación es
Como se acaba de ilustrar, en diferentes situaciones físicas ocurre que un sistemd oscila. En particular, s i la amplitud de las oscilaciones es pequeña, resulta que el movimiento es armónico simple, descrito por ecuaciones del tipo (13.8). Como se habrá podido per- cibir, se llega a la ecuación diferencial que describe el movimiento usando, según el caso, la segunda ley de Newton, para movimiento traslacional, o la ec (11.33) para movimiento de rotación de un cuerpo rígido. E l coeficiente de x (o del ángulo correspondiente) es el cuadrado de la frecuencia angular w del movimiento. De esta manera se encuentra el periodo de la oscila- ción.
A l igual que en el caso del sistema cuerpo-resorte, estudiado con detalle en este capitulo, para los otros sistemas tratados en esta sección se pueden conside- rar movimientos amortiguados, así como casos en que una íuerza externa oscilatoria actúe sobre ellos. Para dichos sistemas se encuentran las mismas conclusio- nes que estudiamos para cl srstema cuerpo-resorte
PROBLEMAS
13.1. 2Qué fuerza genera un resorte de rigidez h75 N/m al comprimirse una longitud de 87 cm? 13.2. Termine de reseñar lo que ocurre con el resurtc’ a l seguir transcurriendo el tiempo en la explicación re- lacionada con la flgura 13.7 13.3. Demuestre físicamente que, al pasar- ei cuerpo
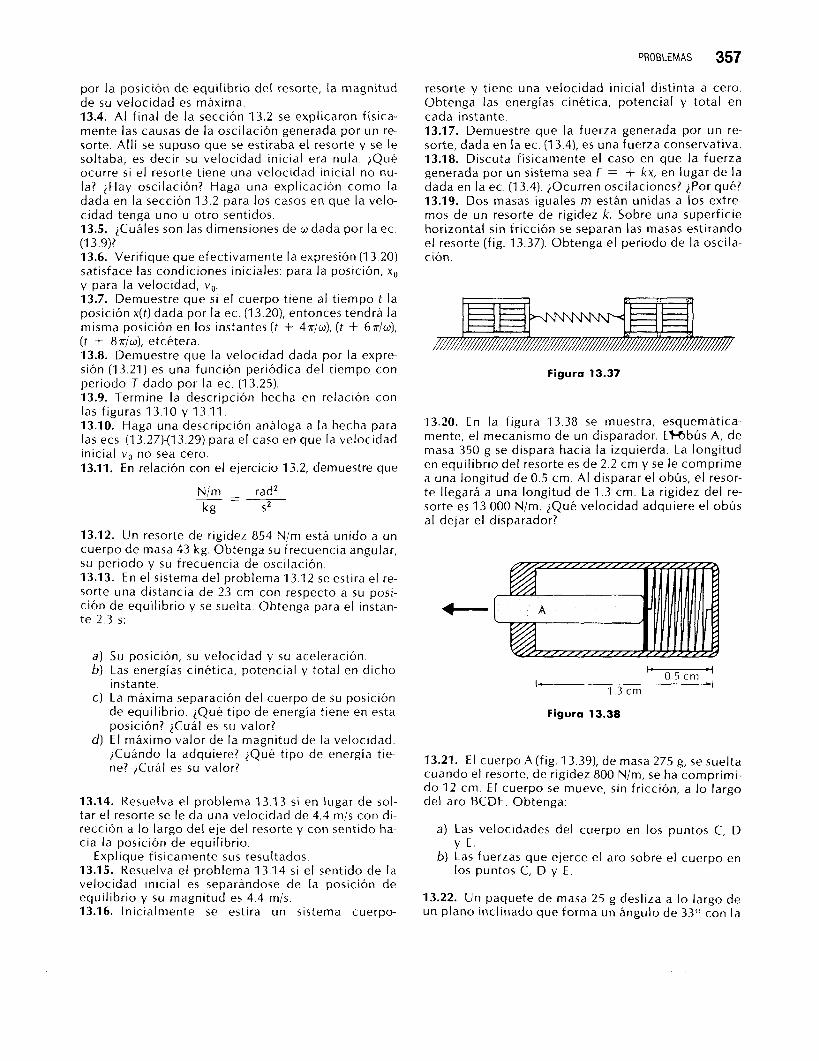
PROBLEMAS 357
por la posición de equilibrio del resorte, la magnitud de su velocidad es máxima. 13.4. AI final de la sección 13.2 se explicaron física- mente las causas de la oscilación generada por un re- sorte. Allí se supuso que se estiraba el resorte y se le soltaba, es decir su velocidad inicial era nula. >Qué ocurre si el resorte tiene una velocidad inicial no nu- la? >Hay oscilación? Haga una explicación como la dada en la sección 13.2 para los casos en que la velo- cidad tenga uno u otro sentidos. 13.5. iCuáles son las dimensiones de w dada por la ec. (1 3.9)? 13.6. Verifique que efectivamente la expresión (1 3.20) satisface las condiciones iniciales: para la posición, x" y para la velocidad, vg. 13.7. Demuestre que s i el cuerpo tiene al tiempo t la posición x ( t ) dada por la ec. (13.20), entonces tendrá la misma posición en los instantes ( t + 4.lr/w), (t + Gniw), ( t + 87r/w), etcétera. 13.8. Demuestre que la velocidad dada por la expre- sión (13.21) es una función periódica del t iempo con periodo T dado por la ec. (13.25). 13.9. Termine la descripción hecha en relación con las figuras 13.10 y 13.11. 13.10. Haga una descripción análoga a la hecha para las ecs. (1 3.27)-(13.29) para el caso en que la velocidad inicial vo no sea cero. 13.11. En relación con el ejercicio 13.2, demuestre que
N/m - rad2 "- kg S2
13.12. Un resorte de rigidez 854 N/m está unido a un cuerpo de masa 43 kg. Obtenga su frecuencia angular, SU periodo y su frecuencia de oscilación. 13.13. En el sistema del problema 13.12 se estira el re- sorte una distancia de 23 cm con respecto a su posi- ción de equil ibrio y se suelta. Obtenga para el instan- te 2.3 S:
Su posición, su velocidad y su aceleración. Las energías cinética, potencial y total en dicho instante. La máxima separación del cuerpo de su posición de equi l ibr io. iQué t ipo de energía tiene en esta posición? iCuál es su valor? E l máximo valor de la magnitud de la velocidad. >Cuándo la adquiere? 2Qué t ipo de energía tie- ne? >Cuál es su valor?
13.14. Resuelva el problema 13.13 si en lugar de sol- tar el resorte se le da una velocidad de 4.4 mis con di- rección a lo largo del eje del resorte y con sentido ha- cia la posición de equilibrio.
13.15. Resuelva el problema 13.14 s i el sentido de la velocidad inicial es separándose de la posición de equil ibrio y su magnitud es 4.4 mis. 13.16. Inicialmente se estira un sistema cuerpo-
Explique físicamente s u s resultados.
resorte y tiene una velocidad inicial distinta a cero. Obtenga las energías cinética, potencial y total en cada instante. 13.17. Demuestre que la fuerza generada por un re- sorte, dada en la ec. (13.4), es una fuerza conservativa. 13.18. Discuta físicamente el caso en que la fuerza generada por un sistema sea F = + kx, en lugar de la dada en la ec. (1 3.4). >Ocurren oscilaciones? >Por qué? 13.19. Dos masas iguales m están unidas a los extre- mos de un resorte de rigidez k . Sobre una superficie horizontal sin fricción se separan las masas estirando el resorte (fig. 13.37). Obtenga el periodo de la oscila- ción.
Figura 13.37
13.20. En la figura 13.38 se muestra, esquemática- mente, el mecanismo de un disparador. EMbús A, de masa 350 g se dispara hacia la izquierda. La longitud en equilibrio del resorte es de 2.2 cm y se le comprime a una longitud de 0.5 cm. A I disparar el obús, el resor- te llegará a una longitud de 1.3 cm. La rigidez del re- sorte es 13 O00 N/m. >Qué velocidad adquiere el obús al dejar el disparador?
e"
Figuro 13.38
13.21. E l cuerpo A (fig. 13.391, de masa 275 g, se suelta cuando el resorte, de rigidez 800 N/m, se ha comprimi- do 12 cm. E l cuerpo se mueve, sin fricción, a lo largo del aro BCDE. Obtenga:
a) Las velocidades del cuerpo en los puntos C, D
b) Las fuerzas que ejerce el aro sobre el cuerpo en Y E.
los puntos C, D y E.
13.22. Un paquete de masa 25 g desliza a lo largo de un plano inclinado que forma un ángulo de 33O con la
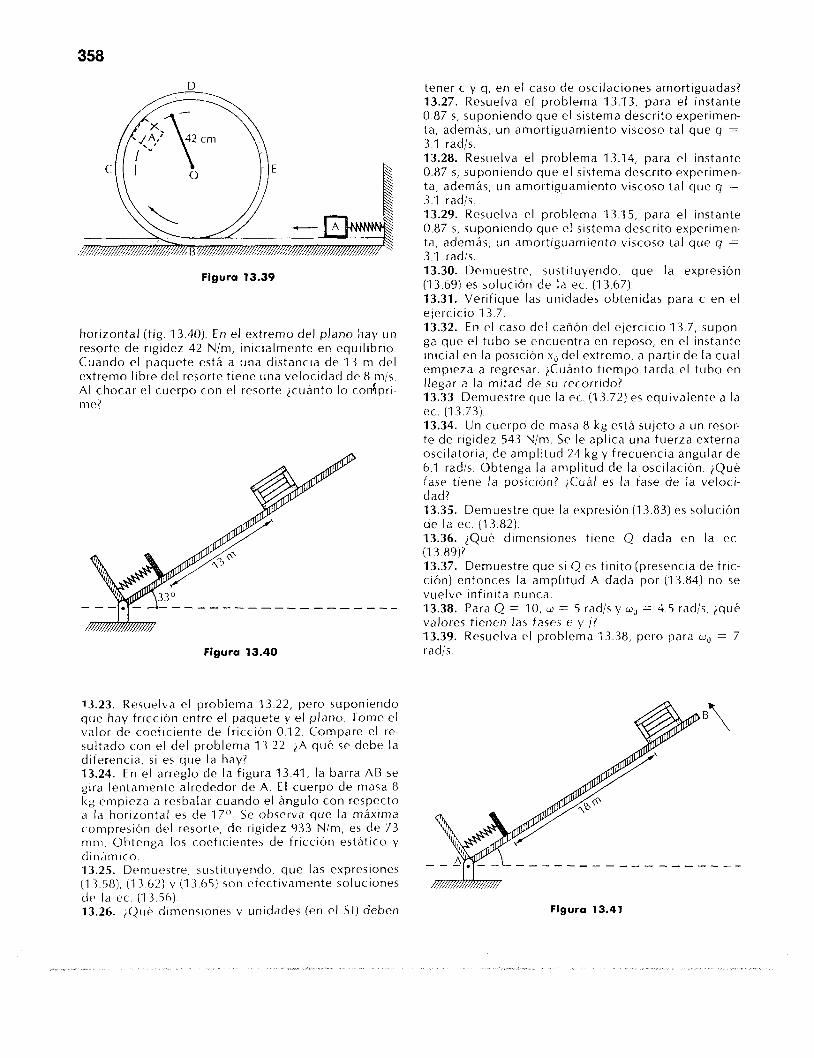
358
Figura 13.39
horizontal (fig. 13.40). En el extremo del plano hay un resorte de rigidez 42 Njm, inicialmente en equilibrio. Cuando el paquete está a una distancia de 1 3 nl del extremo libre del resorte tiene una velocidad de 8 mls. AI chocar e l cuerpo con el resorte jcuánto lo codpr i - m e?
Figura 3 3.40
tener c y q, en el caso de oscilaciones amortiguadas? 13.27. Resuelva e l problema 13.13, para el instante 0.87 S, suponiendo que el sistema descrito experimen- ta, además, un amortiguamiento viscoso tal que q = 3.1 radls. 13.28. Resuelva el problema 13.14, para el instante 0.87 S, suponiendo que el sistema descrito experimen- ta, además, un amortiguamiento viscoso tal que q = 3.1 radls. 13.29. Resuelva el problema 13.15, para el instante 0.87 5, suponiendo que el sistema descrito experimen- ta, además, un amortiguamiento viscoso tal que q = 3.1 radis. 13.30. Demuestre, sustituyendo, que la expresión (13.69) es solución de la ec. (13.67). 13.31. Verifique las unidades obtenidas para c en el ejercicio 13.7. 13.32. En e l caso del cañón del ejercicio 13.7, supon- ga que el tubo se encuentra en reposo, en el instante inicial en la posición x. del extremo, a partir de la cual empieza a regresar. ?Cuánto tiempo tarda el tubo en llegar a la mitad de su recorrido? 13.33 Demuestre que la ec. (13.72) es equivalente a la ec. (1 3.73). 13.34. Un cuerpo de masa 8 kg está sujeto a un resor- te de rigidez 543 Nim. Se le aplica una fuerza externa oscilatoria, de amplitud 24 kg y frecuencia angular de 6.1 radis. Obtenga la amplitud de la oscilación. iQué fase tiene la posición? iCuá1 es la fase de la veloci- dad? 13.35. Demuestre que la expresión (13.83) es solución de la ec. (13.82). 13.36. i Q u é dimensiones tiene Q dada en la ec (1 3.89), 13.37. Demuestre que s i Q es finito (presencia de fric- ción) entonces la amplitud A dada por (13.84) no se vuelve infinita nunca. 13.38. Para Q = I O , w = 5 radis y u,, = 4.5 radis, i qué valores tienen las fases e y j? 13.39. Resuelva e l problema 13.38, pero para o. = 7 radls.
13.23. Resuelva el problema 13.22, pero suponiendo que hay fricci6n entre el paquete y el plano Tome el valor de coeficiente de fricción 0.12. Compare el re- sultado con el del problema 13.22. i A qué se debe la diferencia, s i es que la hay? 13.24. En el arreglo de la figura 13.41, la barra A B se glra lentamente alrededor de A. E l cuerpo de masa 8 kg empieza a resbalar cuando el ángulo con respecto CI la hor i rontal es de 17". Se observa que la máxima compresión del resorte, de rigidez 933 N/m, es de 73 mn1 Obtenga los coeficientes de fricción estático y dinAmlco 13.25. Demuestre, sustituyendo, que las expresiones - - (1 3.58), (1 3 62) y (1 3.65) son efectivamente soluciones d t ~ la ec (13.56). 13.26. jQu6 dimensiones y unldades (en el SI) deben Figura 13.41
""" """"""_
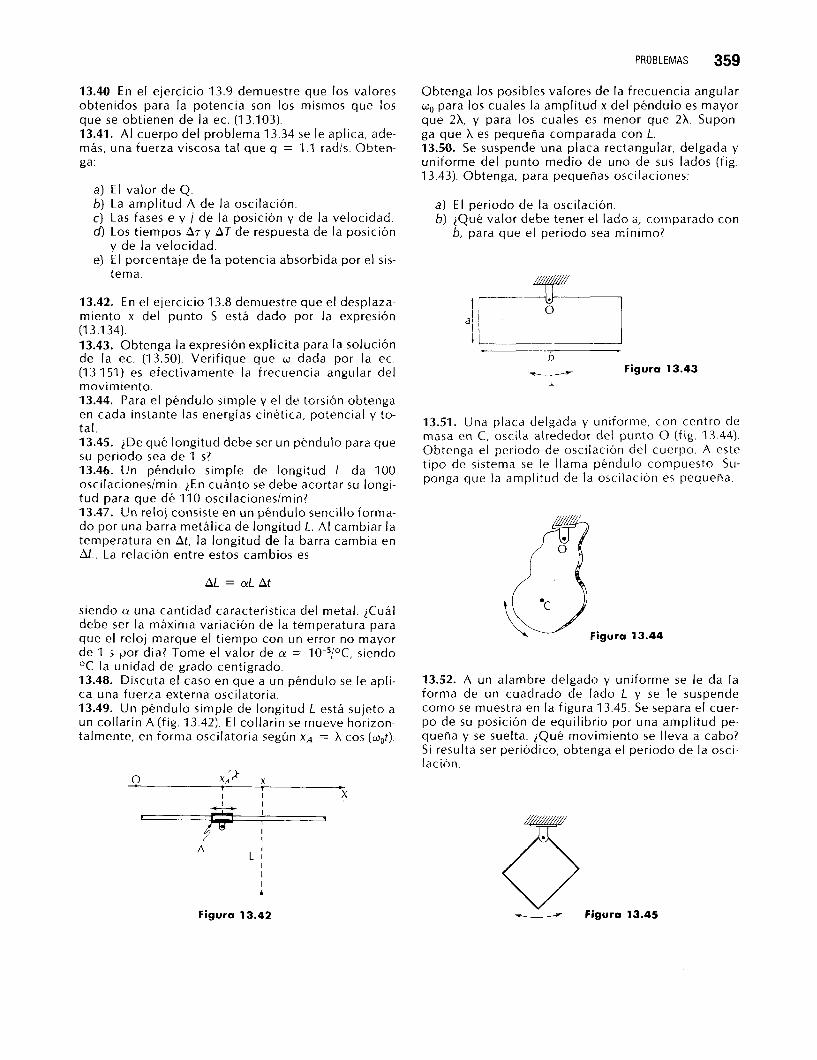
PROBLEMAS 359
13.40 En el ejercicio 13.9 demuestre que los valores obtenidos para la potencia son los mismos que los que se obtienen de la ec. (13,103). 13.41. A I cuerpo del problema 13.34 se le aplica, ade- más, una fuerza viscosa tal que q = ‘I .I radis. Obten- ga:
a) E l valor de Q. b) La amplitud A de la oscilación. c) Las fases e y j de la posición y de la velocidad. d ) Los tiempos Ar y AT de respuesta de la posición
e) E l porcentaje de la potencia absorbida por el sis- y de la velocidad.
tema.
13.42. En el ejercicio 13.8 demuestre que el desplaza- miento x del punto S está dado por la expresión (1 3 .I 34). 13.43. Obtenga la expresión explícita para la solución de la ec. (13.50). Verifique que o dada por la ec. (13.151) es efectivamente la frecuencia angular del movimiento. 13.44. Para el péndulo simple y el de torsión obtenga en cada instante las energías cinética, potencial y to- tal. 13.45. )De qué longitud debe ser un péndulo para que su periodo sea de 1 S ? 13.46. Un péndulo simple de longitud L da 100 oscilaciones/min. iEn cuánto se debe acortar su longi- tud para que dé 110 oscilaciones/min? 13.47. Un reloj consiste en un péndulo sencillo forma- do por una barra metálica de longitud L . Al cambiar la temperatura en At, la longitud de la barra cambia en A l . La relación entre estos cambios es
AL = aL At
siendo CY una cantidad característica del metal. iCuá1 debe ser la máxima variación de la temperatura para que el reloj marque el t iempo con un error no mayor de 1 S por día? Tome el valor de CY = 10-5/0C, siendo O C la unidad de grado centígrado. 13.48. Discuta el caso en que a un péndulo se le apli- ca una fuerza externa oscilatoria. 13.49. Un péndulo simple de longitud L está sujeto a un collarín A (fig. 13.42). E l collarín se mueve horizon- talmente, en forma oscilatoria según XA = X cos (o,t).
Obtenga los posibles valores de la frecuencia angular o. para los cuales la amplitud x del péndulo es mayor que 2X, y para los cuales es menor que 2 X . Supon- ga que X es pequeña comparada con L. 13.50. Se suspende una placa rectangular, delgada y uniforme del punto medio de uno de sus lados (fig. 13.43). Obtenga, para pequeñas oscilaciones:
a) E l periodo de la oscilación. h) iQué valor debe tener el lado a, comparado con
b, para que el periodo sea mínimo?
b u Figura 13.43
I
13.51. Una placa delgada y uniforme, con centro de masa en C. oscila alrededor del punto O (fig. 13.44). Obtenga el periodo de oscilación del cuerpo. A este tipo de sistema se le llama péndulo compuesto. Su- ponga que la amplitud de la oscilación es pequeña.
13.44
13.52. A un alambre delgado y uniforme se le da la forma de un cuadrado de lado L y se le suspende como se muestra en la figura 13.45. Se separa el cuer- po de su posición de equil ibrio por una amplitud pe- queña y se suelta. iQué movimiento se lleva a cabo? Si resulta ser periódico, obtenga el periodo de la osci- lación.
A l L I
I I I &
Figuro 13.42
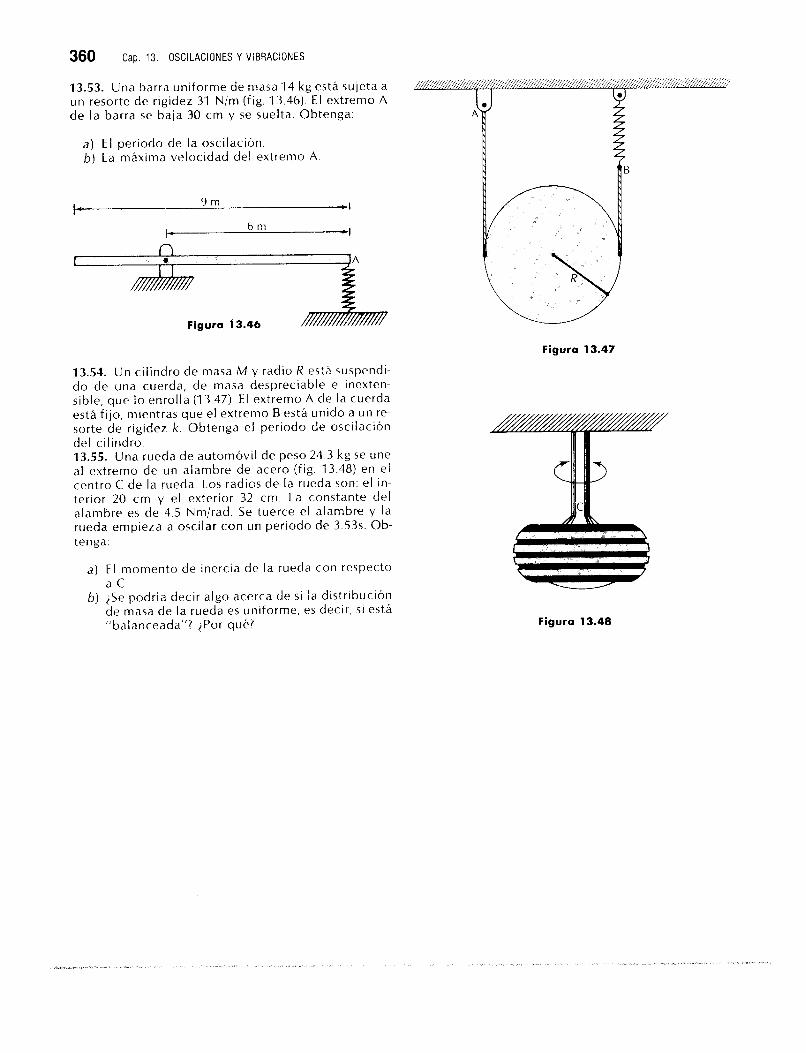
360 Cap. 13. OSCILACIONES Y VIBRACIONES
13.53. Una barra uniforme de masa 1 4 kg está sujeta a un resorte de rigidez 31 Nlm (f ig. 13.46). E l extremo A de la barra se baja 30 cm y se suelta. Obtenga:
a) E l periodo de la oscilación. b) La máxima velocidad del extremo A.
Figura 13.46
13.54. Un c i l indro de masa M y radio R está suspendi- do de una cuerda, de masa despreciable e inexten- sible, que lo enrolla (13.47) E l extremo A de la cuerda está fijo, mientras que el extremo B está unido a un re- sorte de rigidez k . Obtenga el periodo de oscilación del ci l indro. 13.55. Una rueda de automóvil de peso 24.3 kg se une al extremo de un alambre de acero (fig. 13.48) en e l centro C de la rueda. Los radios de la rueda son: el in- terior 20 cm y el exterior 32 cm. La constante del alambre es de 4.5 Nmlrad. Se tuerce el alambre y la rueda empieza a oscilar con un periodo de 3.53s. Ob- tenga:
a) E l momento de inercia de la rueda con respecto a C
b) iSe podria decir algo acerca de si la distribución de masa de la rueda es uniforme, es decir, s i está "balanceada"? ¿Por qui.?
Figura 13.47
Figura 13.48
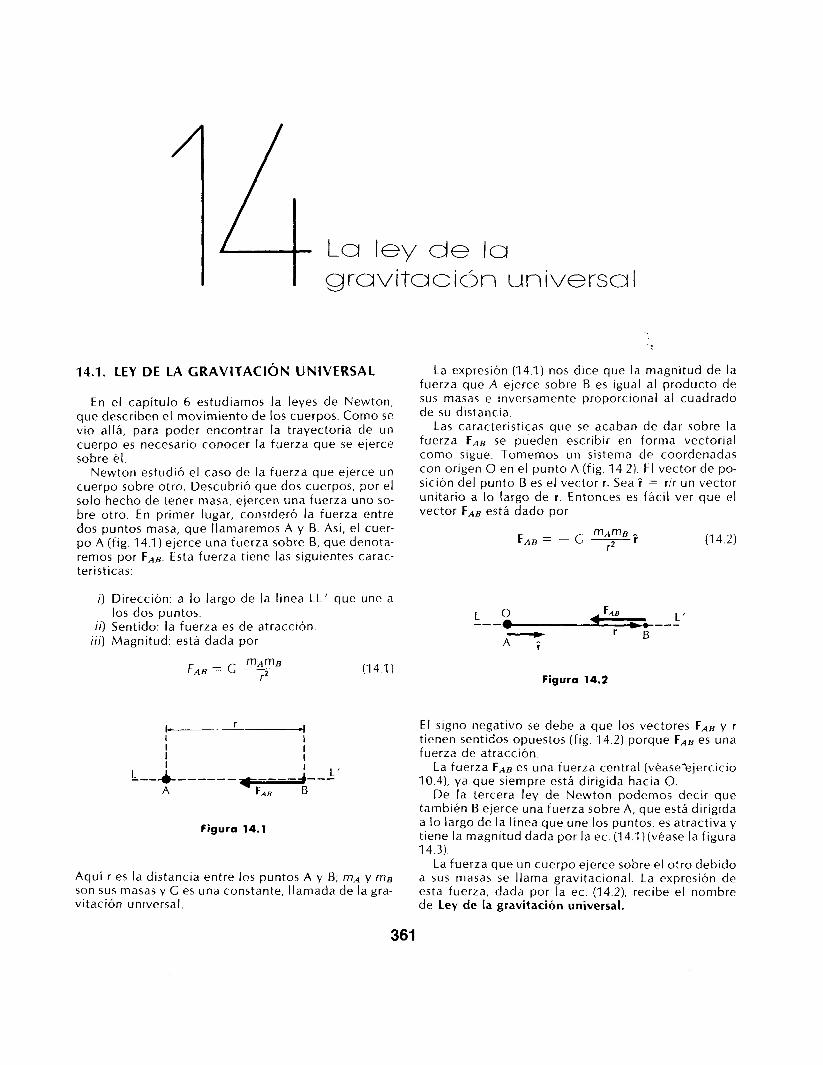
L!! - LCI ley de ICI gravitación u n i v e r s a l
14.1. LEY DE LA GRAVITACIóN UNIVERSAL
En el capítulo 6 estudiamos la leyes de Newton, que describen el movimiento de los cuerpos. Como se vio allá, para poder encontrar la trayectoria de un cuerpo es necesario conocer la fuerza que se ejerce sobre él.
Newton estudió el caso de la fuerza que ejerce un cuerpo sobre otro. Descubrió que dos cuerpos, por el solo hecho de tener masa, ejercen una fuerza uno so- bre otro. En primer lugar, consideró la fuerza entre dos puntos masa, que llamaremos A y B. Así, el cuer- po A (fig. 14.1) ejerce una fuerza sobre B, que denota- remos por FAB. Esta fuerza tiene las siguientes carac- terísticas:
i ) Dirección: a lo largo de la línea LL' que une a
i i ) Sentido: la fuerza es de atracción. i i i ) Magnitud: está dada por
los dos puntos.
(I 4.1 1
I I I
L.-+- """ ' L '
A F B - "
Figura 14.1
Aquí r es la distancia entre los puntos A y 6; mA y mB son sus masas y C es una constante, llamada de la gra- vitación universal.
La expresión (14.1) nos dice que la magnitud de la fuerza que A ejerce sobre B es igual al producto de sus masas e inversamente proporcional al cuadrado de su distancia.
Las características que se acaban de dar sobre la fuerza FAB se pueden escribir en forma vectorial como sigue. Tomemos un sistema de coordenadas con origen O en el punto A (fig. 14.2) . E l vector de po- sición del punto B es el vector r. Sea i = r/r un vector unitario a lo largo de r . Entonces es fácil ver que el vector FAB está dado por
mAmB FAB = - C ___ r2
(1 4.2)
L '
A T ' 8
-"
Figura 14.2
E l signo negativo se debe a que los vectores FAB y r tienen sentidos opuestos (fig. 14.2) porque FAB es una fuerza de atracción,
La fuerza FAB es una fuerza central (véase'ejercicio 10.4) , ya que siempre está dirigida hacia O.
De la tercera ley de Newton podemos decir que también B ejerce una fuerza sobre A, que está dirigida a lo largo de la línea que une los puntos, es atractiva y tiene la magnitud dada por la ec. (14.1) (véase la figura 14.3) .
La fuerza que un cuerpo ejerce sobre el otro debido a sus masas se llama gravitacional. La expresión de esta fuerza, dada por la ec. (14.2), recibe el nombre de Ley de la gravitación universal.
361
362
a "_ L L ' """*"- i; FBA ' 8
Figura 14.3
Una vez establecidas las características de la fuer- za gravitacional, el mismo Newton trabajó con ella usando s u s ecuaciones de movimiento. De esta mane- ra obtuvo la trayectoria que debería seguir un cuerpo sujeto a dicha fuerza. Las predicciones que encontró se verificaron experimentalmente de manera especta- cular. Antes de encontrar algunas de las predicciones, hablaremos brevemente sobre la motivación que tuvo Newton para llegar a la expresión de la fuerza gravita- toria.
Newton hizo las siguientes consideraciones para es- tablecer las características de la fuerza gravitacional. En primer lugar, sabia que la Luna gira alrededor de la Tierra. En consecuencia, la Luna tiene que experimen- tar una fuerza centrípeta, dirigida hacia el centro de la Tierra. iQuién genera esta fuerza centrípeta? Pues claramente que nuestro planeta. Newton hizo la au- daz suposición de que esta fuerza se genera por el hecho de que tanto la Tierra como la Luna t ienen ma- sa. E s decir,
la fuerza centrípeta es por la fuerza que hace que la Luna generada gravitacional que 1 gire alrededor de
* la Tierra ejerce la Tierra sobre la Luna
Newton pensó que s i la Tierra ejerce una fuerza atrac- tiva sobre cualquier cuerpo que se encuentre sobre su superficie, entonces no veía por qué no debería ejer-
cer también una fuerza de la misma naturaleza sobre cuerpos que estén más alejados de su superficie.
De esta argumentación, Newton concluyó que la Tierra ejerce una fuerza sobre la Luna que tiene direc- ción a lo largo de la línea que une los centros de masa de estos cuerpos y sentido hacia la Tierra.
Lo Único que le faltaba encontrar ahora era la mag- nitud de esta fuerza. Newton se motivó a establecer que la fuerza gravitacional entre dos cuerpos es inver- samente proporcional al cuadrado de la distancia, por el resultado dado en el ejercicio 5.12, ec. (5.66), que éI había obtenido. AI igual que nosotros, de considera- ciones puramente cinemáticas, encontró que la rela- ción de la aceleración que se ejerce sobre un cuerpo que está en la superficie de la Tierra (g) y la acelera- ción centrípeta que se ejerce sobre la Luna es inversa- mente proporcional a los cuadrados de las distancias al centro de la Tierra. Por tanto, la relación entre las fuerzas correspondientes (que son proporcionales a las aceleraciones) también tiene que seguir la propor- ción inversa del cuadrado de las distancias.
Recordamos que al obtener la relación (5.66), sola- mente se usaron los valores de g, de la distancia de la Luna a la Tierra, y el periodo de la Luna en su movi- miento alrededor de la Tierra.
En resumen, en este tren de ideas Newton hizo las importantes suposiciones:
i ) La tierra es el agente que genera la aceleración centrípeta que hace que la Luna, gire a su alre- dedor. Por tanto, de su segunda ley, es la Tierra la que ejerce la fuerza sobre la Luna.
i i ) La fuerza que ejerce la Tierra sobre la Luna es de la misma naturaleza que la que ejerce la Tie- rra sobre un cuerpo situado sobre su superficie.
i i i ) Estas fuerzas se deben a que los cuerpos tienen masa.
iv) La fuerza está dada por la ec. (14.2).
E n la actualidad nos podrán parecer triviales algu- nas de estas suposiciones. Sin embargo, en la época de Newton estaba todavía muy arraigada la creen- cia de que los fenómenos que ocurrían en la Tierra tenían un carácter distinto a los que se llevaban a cabo en los cielos. Fue un acto muy valeroso de New- ton ir contra esta creencia y establecer que los fenó- menos tanto terrestres como celestiales son de la mis- ma naturaleza.
Apliquemos ahora la ley de la gravitación universal al movimiento de la Luna. De la segunda ley de New- ton se tiene que la magnitud de la aceleración aL que experimenta la Luna es
(14.3)
ALGUNAS APLICACIONES 363
Sustituyendo el valor de aL ( = 2.7 X IOw3 misz) que se obtuvo en el ejercicio 5.12 y el valor de la distancia Tierra-Luna (= 3.84 X IO8 m) obtenemos que
Aquí FTL es la magnitud de la fuerza que la Tierra ejer- ce sobre la Luna y mL es la masa de la Luna. De la ec. (14.1) se tiene que
(1 4.4)
Aquí RTL es la distancia entre la Tierra y la Luna (fig. 14.4); mT es la masa de la Tierra. Dividiendo ambos miembros entre mL y sustituyendo en la ec. (14.3) se obtiene que
a L = C - mT R T L ~
(1 4.5)
Luna
Figura 14.4
Multiplicando ambos miembros de esta ecuación pol. R T L ~ se encuentra
C m , = 2.7 X 10-3(m/s2) X (3.84 X IO8 m)2
= 3.981 X IOl4 m3/s2 (I 4.7)
Queremos hacer énfasis en que hasta este momento no se ha dicho nada acerca de la constante C que apa- rece en la ec. (14.1). De hecho, Newton solamente la iptrodujo como una constante de proporcionalidad. E l no tuvo forma de obtener su valor numérico. Lo Único a lo que llegó fue justamente a la ec. (14.7). Pero en esta ecuación también aparece otra incógni- ta, la masa de la Tierra mT, que éI tampoco conocía. No fue sino mucho tiempo después, en 1798, cuando Newton ya no vivía, que Henri Cavendish determinó experimentalmente el valor de C, midiendo la fuerza entre dos esferas de plomo cuyas masas y distancia conocía (véase problema 14.7). E l valor de C obtenido de mediciones más precisas es
C = 6.673 X IO-" N m2/kg2 (1 4.8)
Con este valor de C, se puede encontrar entonces la masa de la Tierra, a partir de la ec. (14.7)
3.981 X IOl4 m3/s2 6.673 X IO-" N m2/kg2
m7 =
= 5.967 X IOz4 kg (1 4.9)
Éste es el valor de la masa de la Tierra, Mucha gente se ha referido al experimento de Cavendish como el de "pesar la Tierra", ya que de sus resultados se pudo obtener, por primera vez, su masa.
De hecho, Cavendish también comprobó en sus ex- perimentos que la fuerza gravitacional entre dos masas efectivamente era atractiva y, además, era pro- porcional al producto de las masas de los cuerpos e in- versamente proporcional al cuadrado de su distancia. Sin embargo, para cuando hizo esto ya no se dudaba de la validez de la ec. (14.2), ya que sus predicciones, justa- mente basadas en estas dependencias, ya se habían veri- ficado.
14.2. ALGUNAS APLICACIONES
Ejercicio 14.1. Dos masas de 1 5 kg cada una se en- cuentran separadas una distancia de 2.2 m. iQué fuer- za ejerce una sobre la otra?
Span m (= 1 5 kg) la masa de cada uno de los cuer- pos y r (= 2.2 m) la distancia entre ellos. De la ec. (14.1) se tiene, para este caso, que la magnitud de la fuerza F ente los dos cuerpos es
F = C - m2 r2
364 Cap. 14. LA LEY DE LA GRAVlTAClÓN UNIVERSAL
Sustituyendo tos valores de m, r dados y de (14.8)), obtenemos
F = 6.673 X I O - " __ N m2 (15 kg)2 kg2 (2.2 m)2
C (ec.
= 3.1 x 10-9 N
La dirección de la fuerza es a lo largo de la línea que une a lo5 cuerpos y el sentido es de atracción (fig. 14.5)
Esta fuerza es extremadamente pequeña, y para todo efecto práctico es imperceptible. Solamente en el caso en que las masas sean de gran tamaño, por ejemplo, para cuerpos celestes, el valor de la fuerza de gravitación es apreciable y sus efectos se dejan sentir.
Figura 14.5
Ejercicio 14.2. Obtenga la aceleración que experi- menta un cuerpo situado sobre la superficie de la Tierra.
En este caso, la situación es la mostrada en la figura 14.6. La distancia entre el cuerpo y el centro de masa de la Tierra es justamente el radio terrestre R r (= 6 378 kg). Si denotamos por m la masa del cuerpo, la ec. (14.1) queda en este caso como
Figura 14.6
(1 4.1 0)
Aquí F es la magnitud de la fuerza que la Tierra ejerce sobre el cuerpo, La dirección de esta fuerza está diri- gida a lo largo del radio y su sentido es hacia el centro de la Tierra (fig. 14.6). Pero de lo aprendido anterior- mente, sabemos que esta fuerza es precisamente el peso del cuerpo, La magnitud de la aceleración a que expe- rimenta el cuerpo la obtenemos dividiendo la ec. (14.10) entre m
(14.11)
Sustituyendo el valor del producto (Cm,) dado por la ec. (14.7) y el radio terrestre, se encuentra que
a = 3.981 x m%' = 9,786 (6.378 X I O 6 m)2
que es precisamente el valor de la aceleración de la gravedad y que hemos denotado por g.
En este ejercicio se ha supuesto que la Tierra es un cuerpo perfectamente esférico. Sin embargo, no l o es. La Tierra tiene una forma que está más achatada en los polos que en el ecuador. Por tanto, un cuerpo si- tuado en un polo dista menos del centro de la Tierra que un cuerpo situado en el ecuador. En vista de que la ec. (14.10) nos indica que la aceleración varía inver- samente con el cuadrado de la distancia a l centro, concluimos que la aceleración de la gravedad en el polo es mayor que en el ecuador (véase problema 14.8). A medida que se va del polo al ecuador, la dis- tancia al centro de la Tierra va aumentando y, por tan- to, la aceleración de la gravedad va disminuyendo. E l valor de g que se ha usado anteriormente en el texto (9.8 mis2), es un valor medio.
Ejercicio 14.3. Obtenga la aceleración que experi- menta un cuerpo que se encuentra a una altura de 10 km sobre la superficie terrestre.
En este caso, la distancia del cuerpo al centro de la Tierra C es igual a AC (fig. 14.7). Pero
AC = AB + BC
= 10 km + 6 378 km
= 6 388 km = 6.388 X I O 6 m
Figura 14.7
En consecuencia, de la ec. (14.11) se tiene que
que sustituyendo valores (véase ec. (14.7)) nos da
3.981 x 1014 ~ I Y S ~ a = (6.388 X I O 6 m)2
= 9.756 m/s2
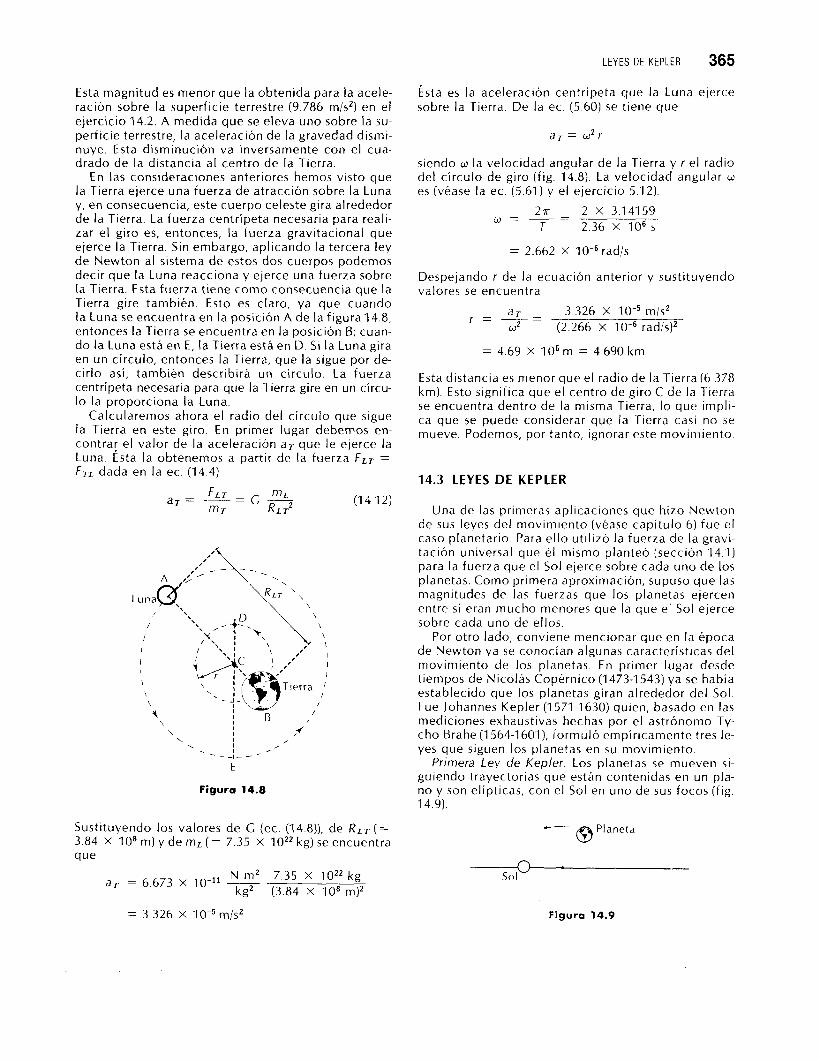
LEYES DE KEPLER 365
Esta magnitud es menor que la obtenida para la acele- ración sobre la superficie terrestre (9.786 mis2) en el ejercicio 14.2. A medida que se eleva uno sobre la su- perficie terrestre, la aceleración de la gravedad dismi- nuye. Esta disminución va inversamente con el cua- drado de la distancia al centro de la Tierra.
En las consideraciones anteriores hemos visto que la Tierra ejerce una fuerza de atracción sobre la Luna y, en consecuencia, este cuerpo celeste gira alrededor de la Tierra. La fuerza centrípeta necesaria para reali- zar el giro es, entonces, la fuerza gravitacional que ejerce la Tierra. Sin embargo, aplicando la tercera ley de Newton al sistema de estos dos cuerpos podemos decir que la Luna reacciona y ejerce una fuerza sobre la Tierra. Esta fuerza tiene como consecuencia que la Tierra gire también. Esto es claro, ya que cuando la Luna se encuentra en la posición A de la figura 14.8, entonces la Tierra se encuentra en la posición 6; cuan- do la Luna está en €, la Tierra está en D. Si la Luna gira en un círculo, entonces la Tierra, que la sigue por de- cirlo así, también describirá un circulo. La fuerza centrípeta necesaria para que la Tierra gire en un círcu- lo la proporciona la Luna.
Calcularemos ahora el radio del circulo que sigue la Tierra en este giro. En primer lugar debemos en- contrar el valor de la aceleración a T que le ejerce la Luna. ÉSta la obtenemos a partir de la fuerza FL7. = F T ~ dada en la ec. (14 4)
(1 4.1 2)
E
Figura 14.8
Sustituyendo los valores de C (ec. (14.8)), de RLT ( = 3.84 X IO8 m) y de mL ( = 7.35 X IO2* kg) se encuentra que
a T = 6.673 X IO-" - N m2 7.35 X kg kg2 (3.84 x IO8 m)2
ÉSta es la aceleración centrípeta que la Luna ejerce sobre la Tierra. De la ec. (5.60) se tiene que
a T = w 2 r
siendo w la velocidad angular de la Tierra y r el radio del circulo de giro (f ig. 14.8). La velocidad angular w es (véase la ec. (5.61) y el ejercicio 5.12).
2 a - 2 X 3.14159 T 2.36 X IO6 S
= "
= 2.662 x rad/s
Despejando r de la ecuación anterior y sustituyendo valores se encuentra
r = a r - 3.326 X mis2 w2 (2.266 X rad/sI2
= 4.69 X IO6 m = 4 690 k m
Esta distancia e5 menor que el radio de la Tierra (6 378 km). Esto significa que el centro de giro C de la 7-ierra se encuentra dentro de la misma Tierra, lo que impli- ca que se puede considerar que la Tierra casi no se mueve. Podemos, por tanto, ignorar este movimiento.
14.3 LEYES D E KEPLER
Una de las primeras aplicaciones que hizo Newton de sus leyes del movimiento (véase capítulo 6) fue el caso planetario. Para ello uti l izó la fuerza de la gravi- tación universal que éI mismo planteó (sección 14.1) para la fuerza que el Sol ejerce sobre cada uno de los planetas. Como primera aproximación, supuso que las magnitudes de las fuerzas que los planetas ejercen entre sí eran mucho menores que la que el Sol ejerce sobre cada uno de ellos.
Por otro lado, conviene mencionar que en la época de Newton ya se conocían algunas características del movimiento de los planetas En primer lugar desde tiempos de Nicolás Copérnico (1473-1543) ya se había establecido que los planetas giran alrededor del Sol. Fue Johannes Kepler (1571-1630) quien, basado en las mediciones exhaustivas hechas por el astrónomo Ty- cho Brahe (1564-16Ol), formuló empíricamente tres le- yes que siguen los planetas en su movimiento.
Primera Ley de Kepler. Los planetas se mueven si - guiendo trayectorias que están contenidas en un pla- no y son elípticas, con el Sol en uno de sus focos (fig. 14.91.
- 8 Planeta
n SolW
= 3.326 X mis2 Figura 14.9
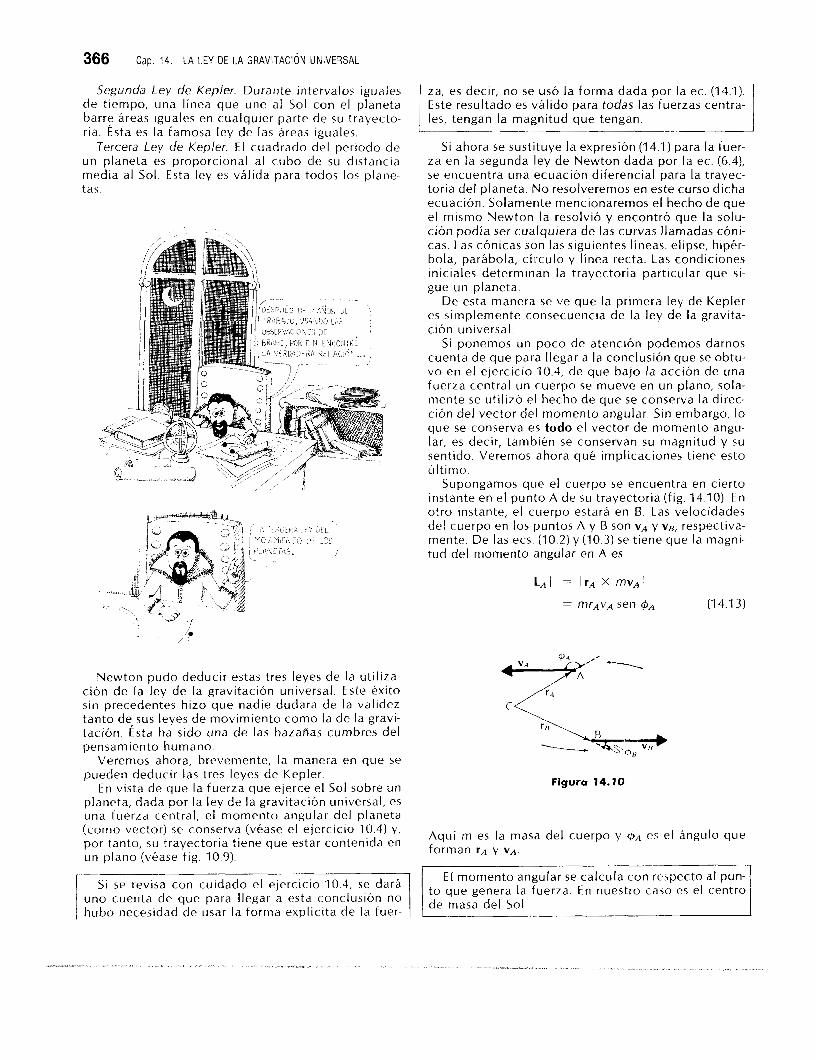
366 Cap. 14. LA LEY DE LA GRAVITACI~N UNIVERSAL
Segunda Lev de Kepler. Durante intervalos iguales de tiempo, una línea que une al Sol con el planeta barr? áreas iguales en cualquier parte de su trayecto- ria. Esta es la famosa ley de las áreas iguales.
Tercera Ley de Kepler. E l cuadrado del periodo de un planeta es proporcional al cubo de su distancia media al Sol. Esta ley es válida para todos l o s plane- tas
Newton pudo deducir estas tres leyes de la uti l iza- ción de la ley de la gravitación universal. Este éxito sin precedentes hizo que nadie dudara de la validez tanto de, s u s leyes de movimiento como la de la gravi- tación. Esta ha sido una de las hazañas cumbres del pensamiento humano.
Veremos ahora, brevemente, la manera en que se pueden deducir las tres leyes de Kepler.
En vista de que la fuerza que ejerce el Sol sobre un planeta, dada por la lev de la gravitación universal, es una fuerza central, el momento angular del planeta (como vector) se conserva (véase el ejercicio 10.4) y, por tanto, su trayectoria tiene que estar contenida en un plano (véase fig. 10.9).
S i se revisa con cuidado el ejercicio 10.4, se dará uno cuenta de que para llegar a esta conclusión no hubo necesidad de usar la forma explícita de l a fuer-
za, es decir, no se usó la forma dada por la ec. (14.1). tste resultado es válido para todas las fuerzas centra- les, tengan la magnitud que tengan.
S i ahora se sustituye la expresión (1 4.1) para la fuer- za en la segunda ley de Newton dada por la ec. (6.4), se encuentra una ecuación diferencial para la trayec- toria del planeta. No resolveremos en este curso dicha ecuación. Solamente mencionaremos el hecho de que el mismo Newton la resolvió y encontró que la solu- ción podía ser cualquiera de las curvas llamadas cóni- cas. Las cónicas son las siguientes líneas: elipse, hipér- bola, parábola, círculo y línea recta. Las condiciones iniciales determinan la trayectoria particular que si- gue un planeta.
De esta manera se ve que la primera ley de Kepler es simplemente consecuencia de la ley de la gravita- ción universal.
S i ponemos un poco de atención podemos darnos cuenta de que para llegar a la conclusión que se obtu- vo en el ejercicio 10.4, de que bajo la acción de una fuerza central un cuerpo se mueve en un plano, sola- mente se uti l izó el hecho de que se conserva la direc- ción del vector del momento angular. Sin embargo, lo que se conserva es todo el vector de momento angu- lar, es decir, también se conservan s u magnitud y su sentido. Veremos ahora qué implicaciones tiene esto úl t imo.
Supongamos que el cuerpo se encuentra en cierto instante en el punto A de su trayectoria (fig. 14.10). En otro instante, el cuerpo estará en B. Las velocidades del cuerpo en los puntos A y B son VA y vB, respectiva- mente. De las ecs. (10.2) y (10.3) se tiene que la magni- tud del momento angular en A es
I L A / = 1rA x mvA/
= mrAVA sen $A (14.1 3)
Figura 14.10
Aquí m es la masa del cuerpo y +A es e l ángulo que forman rA y VA.
E l momento angular se calcula con respecto al pun- to que genera la fuerza. En nuestro caso es el centro de masa del Sol. -1
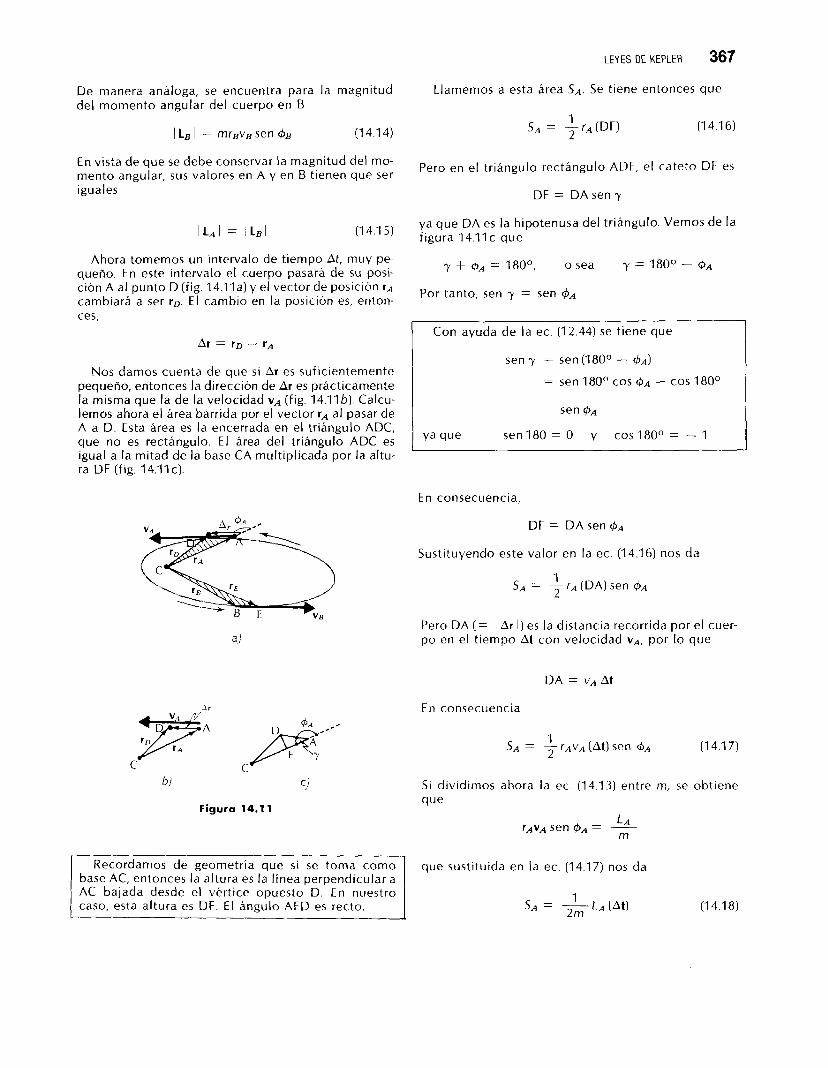
De manera análoga, se encuentra para la magnitud del momento angular del cuerpo en B
1 LB I = mrBvB sen (1 4.1 4)
En vista de que se debe conservar la magnitud del mo- mento angular, sus valores en A y en B tienen que ser iguales
/ L A 1 = / L B 1 (1 4.1 5)
Ahora tomemos un intervalo de tiempo At, muy pe- queño. En este intervalo el cuerpo pasará de su posi- ción A al punto D (fig. 14.11a) y el vector de posición rA cambiará a ser rD. E l cambio en la posición es, enton- ces,
A r = rD - rA
Nos damos cuenta de que s i A r es suficientemente pequeño, entonces la dirección de A r es prácticamente la misma que la de la velocidad VA (fig. 14.11b). Calcu- lemos ahora el área barrida por el vector rA al pasar de A a D. Esta área es la encerrada en el triángulo ADC, que no es rectángulo. E l área del triángulo ADC es igual a la mitad de la base CA multiplicada por la altu- ra DF (f ig. 14.11~).
a i
c!
Figura 14.1 1
LEYES DE KEPLER 367
Llamemos a esta área SA. Se tiene entonces que
SA = - f A (DF) 1 2
(1 4.1 6)
Pero en el triángulo rectángulo ADF, el cateto DF es
DF = DA sen y
ya que DA es la hipotenusa del triángulo. Vemos de la figura 1 4 . 1 1 ~ q u e
y + $A = 180°, O sea y = 180' - $A
Por tanto, sen y = sen $A
Con ayuda de la ec. (12.44) se tiene que
sen y = sen (180' - 4 ~ ) = sen 180' cos $A - cos 180'
sen +A
Ya que sen180 = O y cos18Oo = - 1
En consecuencia,
DF = D A sen @A
Sustituyendo este valor en la ec. (14.16) nos da
1 2 SA = - fA (DA) sen $A
Pero DA ( = 1 A r I ) es la distancia recorrida por el cuer- po en el tiempo At con velocidad vA, por lo que
DA VA At
En consecuencia
SA - ~ A V A (At) sen (PA (1 4.1 7 ) 1 2
S i dividimos ahora la ec. (14.13) entre m, se obtiene que
~ A V A sen $A = - LA m
Recordamos de geometría que s i se toma como que sustituida en la ec. (14.17) nos da base AC, entonces la altura es la línea perpendicular a AC bajada desde el vértice opuesto D. En nuestro caso, esta altura es DF. E l ángulo AFD es recto. SA - L A ( A t )
1 2m
(1 4.1 8)
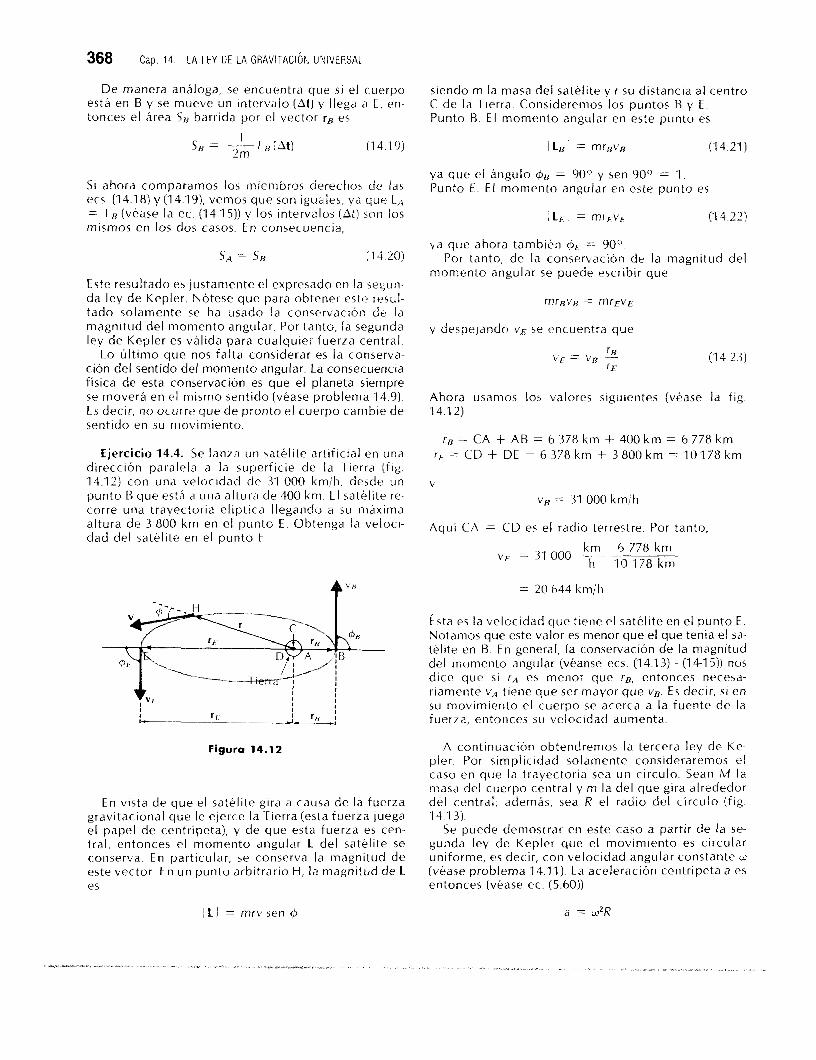
368 Cap. 14. LA LEY DE LA GRAVITACIóN UNIVERSAL
De manera análoga, se encuentra que s i el cuerpo está en B y se mueve un intervalo (At) y llega a E , en- tonces el área SR barrida por e l vector rR e>
(1 3:1 O)
Si ahora comparamos los miembros derechos de las ecs. (1 4.1 8) y (1 4.1 91, vemos que son iguaies, ya quc LA = LB (véase la ec. (14.15)) y los intervalos ( & J son /os mismos en los dos casos. En consecuencia,
Este resultado es justamente el expresado en la srgtin- da ley de Kepier. Nótese que para obtener e 5 t ~ rt5uI- tad0 solamente se ha usado la conservación de la magnitud del momento angular. Por tanto, la segunda ley de Kepler es válida para cualquier fuerza central.
(.o úl t imo que nos falta considerar es ia conserva- ción del sentido del momento angular. La consecuencia fisica de esta conservacibn es que el planeta siempre se moverá en e 1 mismo sentido (véase problema 14.9). Es decir, no ocurre yue de pronto e l cuerpo cambie de sentido en su movimiento.
Ejercicio 14.4. Se lanza tin 3atélite artificial en una dirección paralela a l a superficie de la Tierra ( t ~ g 14.12) con una velociddd de 31 000 km/h, desde un punto t3 que está n una altura de 400 km. E l satklite re- corre una travectoria elíptica llegando a su máxima altura de 3 800 km en el punto E . Obtenga la velocl- dad del satélite en el punto E
siendo m la masa del satélite y r su distancia al centro C de In Tierra. Consideremos los puntos B y E . Punto B. E l momento angular en este punto es
i LB I = r n r g v R (1 4.21)
ya que el ángulo & = 90" y sen 90" = 1 Punto E . FI momento angular en este punto es
~ Lt , = m E v E (14.22)
va que ahora también br.. == 90".
momento angular se puede escribir que Por tanto, de la conservación de la magnitud del
y despejando vI; se encuentra que
Ahora usamos los valores siguientes (vkase ¡a tig. 14.1 2)
~ L I = rnrvsen 4
rR = CA + AB = 6 378 k m + 400 k m = 6 778 k m r E 1 CD t DE = 6 378 km + 3 800 k m = 10178 km
V
vB = 31 000 kmi'h
Aquí CA = CD es el radio terrestre. Por tanto,
Figura 14.12
En vista de que el satélite gira a causa de la fuerza gravitacional que le ejerce la Tierra (esta fuerza juega el papel de centrípeta), y de que esta fuerza es cen- t r a l , entonces el momento angular L del satélite se conserva. En particular, se conserva la magnitud de este vector. En un punto arbitrario H, la magnitud de 1 es
Ésta es la velccidad que t iene el satélite en el punto E . Notamos que este valor es menor que el que tenía el sa- télite en t3. En general, la conservación de la magnitud del mclmento angular (véanse ecs. (14.13) - (14-15)~ nos dice que si rA es menor que rB, entonces necesa- riamente vA tiene que ser mayor que vB. E s decir, s i en su movimiento el cuerpo se acerca a la fuente de la fuerza, entonces su velocidad aumenta.
A contintiacihn obtendremos la tercera ley de Ke- pier Por stmplicidad solamente consideraremos el caso en que la trayectoria sea un círculo. Sean M la masa del cuerpo central y m la del que gira alrededor del central; ddemás, sea R el radio del círculo (fig. 14.1 3) .
Se puede demostrar en este caso a partir de la se- gunda ley de Kepler que el movimiento es circular uniforme, es decir, con velocidad angular constante w (vkase problema 14.11). La aceleración centrípeta a es entonces (véase ec. (5.60))
a = w2R
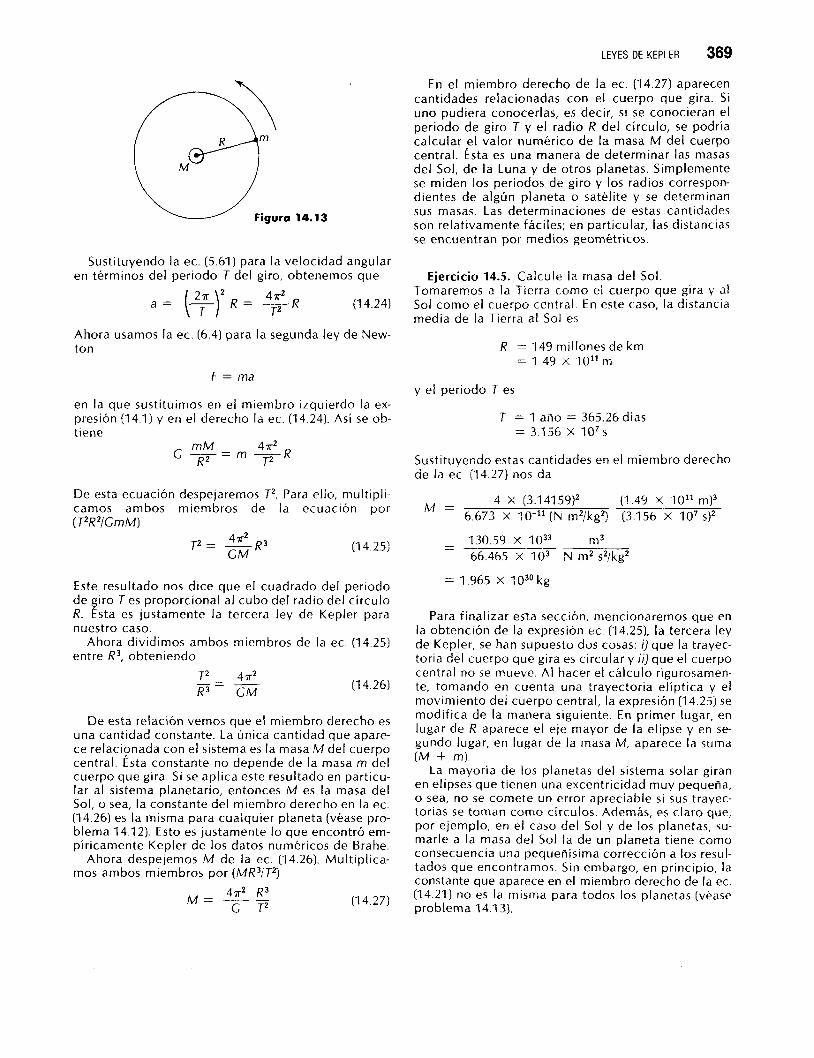
LEYES DE KEPLER 369
14.13
Sustituyendo la ec. (5.61) para la velocidad angular en términos del periodo 1 del giro, obtenemos que
(14.24)
Ahora usamos la ec. (6.4) para la segunda ley de New- ton
F = ma
en la que sustituimos en el miembro izquierdo la ex- presión (14.1) y en el derecho la ec. (14.24). Así se ob- tiene
De esta ecuación despejaremos T2. Para elio, multipli- camos ambos miembros de la ecuación por ( T2R2/CmM)
(1 4.25)
Este resultado nos dice que el cuadrado del periodo de giro 1 es proporcional al cubo del radio del círculo R . Esta es justamente la tercera ley de Kepler para nuestro caso.
Ahora dividimos ambos miembros de la ec. (14.25) entre R3, obteniendo
(1 4.26)
D e esta relación vemos que el miembro derecho es una cantidad constante. La única cantidad que apare- ce relacionada con el sistema es la masa M del cuerpo central. Esta constante no depende de la masa m del cuerpo que gira. S i se aplica este resultado en particu- lar al sistema planetario, entonces M es la masa del Sol, o sea, la constante del miembro derecho en la ec. (14.26) es la misma para cualquier planeta (véase pro- blema 14.12). Esto es justamente lo que encontró em- píricamente Kepler de los datos numéricos de Brahe.
Ahora despejemos M de la ec. (14.26). Mult ip l ica- mos ambos miembros por (MR3/T2)
En el miembro derecho de la ec. (14.27) aparecen cantidades relacionadas con el cuerpo que gira. S i uno pudiera conocerlas, es decir, s i se conocieran el periodo de giro T y el radio R del círculo, se podría calcular , e l valor numérico de la masa M del cuerpo central. €Sta es una manera de determinar las masas del Sol, de la Luna y de otros planetas. Simplemente se miden los periodos de giro y los radios correspon- dientes de algún planeta o satélite y se determinan sus masas. Las determinaciones de estas cantidades son relativamente fáciles; en particular, las distancias se encuentran por medios geométricos.
Ejercicio 14.5. Calcule li? masa del Sol. Tomaremos a la Tierra como el cuerpo que gira y a1 Sol como el cuerpo central. En este caso, la distancia media de la Tierra al Sol es
R = 149 millones de km = 1.49 i< 10" m
y el periodo 1 es
1 = 1 año = 365.26 días = 3.156 X 10' S
Sustituyendo estas cantidades en el miembro derecho de la ec. (14.27) nos da
4 X (3.141 5912 (7.49 X loll m)3 6.673 x IO-" (N m2/kg2) i3.156 x IO7 s ) ~ M =
- 130.59 X 1 0 3 3 m 3 - 66.465 x IO3 N m 2 s2/kg2
= 1.965 x IO3O kg
Para finalizar esta sección, mencionaremos que en la obtención de la expresión ec. (14.25), la tercera ley de Kepler, se han supuesto dos cosas: i) que la trayec- toria del cuerpo que gira es circular y i i ) que el cuerpo central no se muwe. A l hacer el cálculo rigurosamen- te, tomando en cuenta una trayectoria elíptica y el movimiento del cuerpo central, la expresión (14.25) se modifica de la manera siguiente. En primer lugar, en lugar de R aparece el eje mayor de la elipse y en se- gundo lugar, en lugar de la masa M, aparece la suma (M + m).
La mayoria de los planetas del sistema solar giran en elipses que tienen una excentricidad muy pequeña, o sea, no se comete un error apreciable si sus trayec- torias se toman como circulos. Además, es claro que, por ejemplo, en el caso del Sol y de los planetas, su- marle a la masa del Sol la de un planeta t iene como consecuencia una pequeñísima corrección a los resul- tados que encontramos. Sin embargo, en principio, la constante que aparece en el miembro derecho de la ec. (14.21) no es la misma para todos los planetas (véase problema 14.1 3).
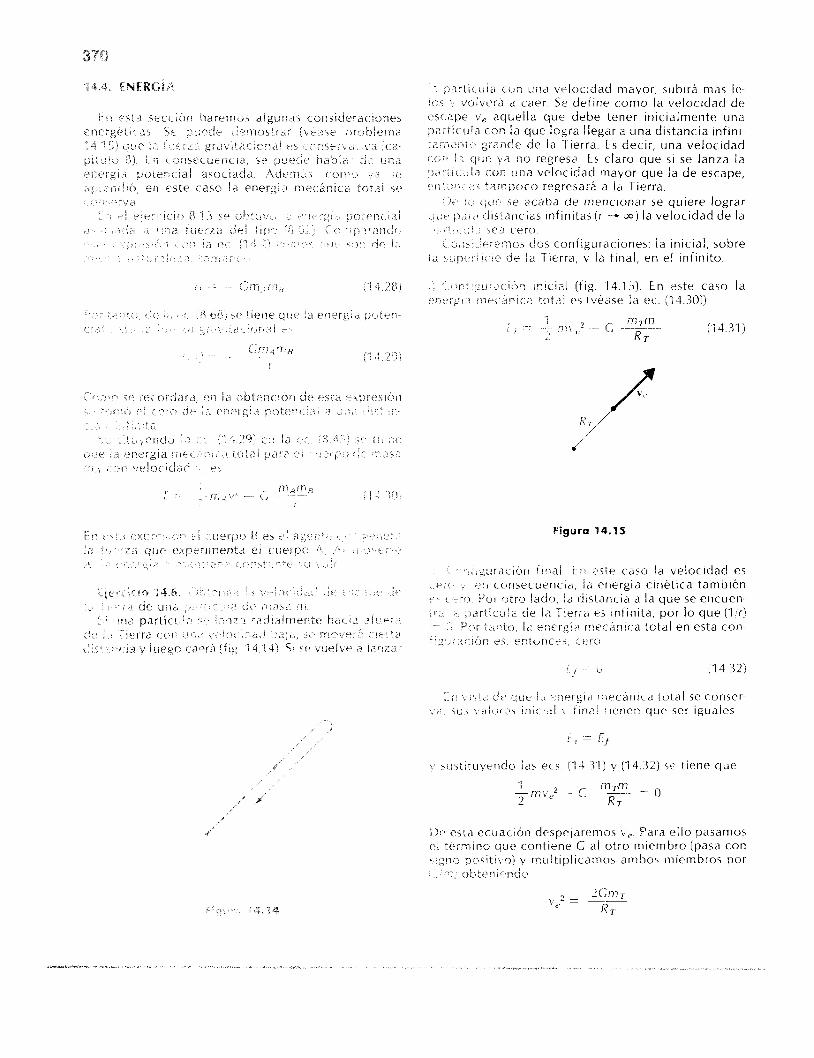
r"
Figuro 14.15
' f - í.* (1 4.32)
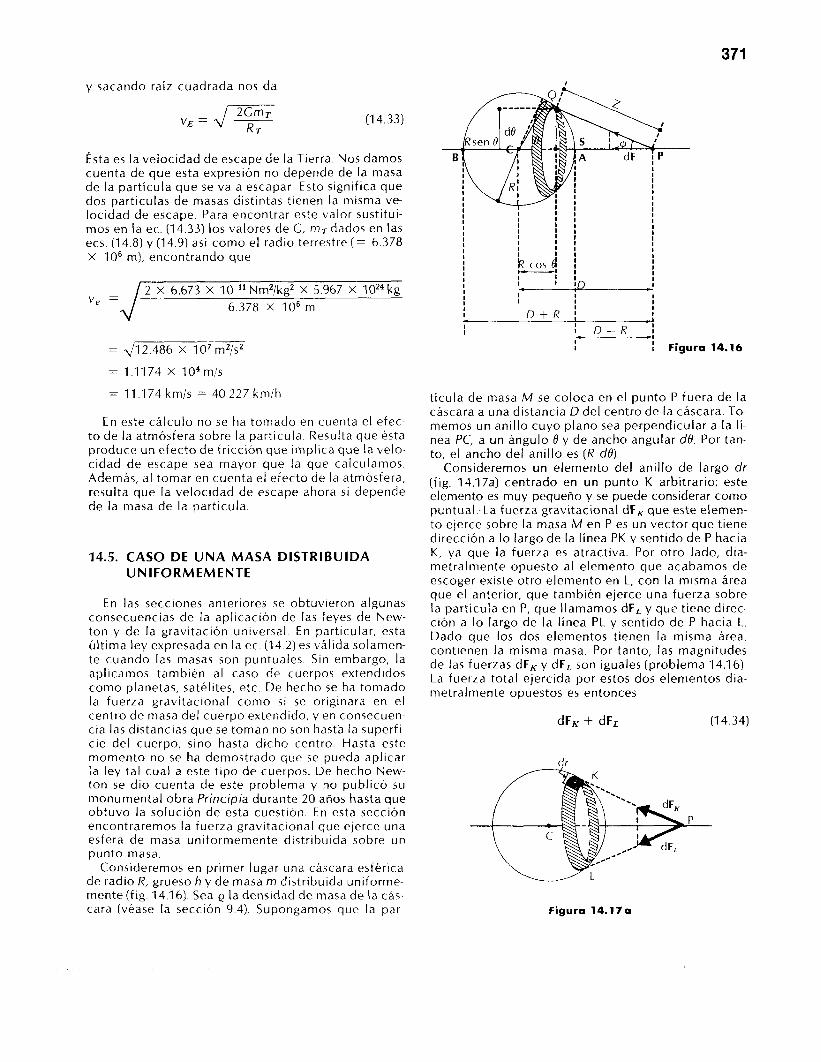
371
y sacando raíz cuadrada nos da
(1 4.33)
ÉSta es la velocidad de escape de la Tierra. Nos damos cuenta de que esta expresión no depende de la masa de la partícula que se va a escapar. Esto significa que dos partículas de masas distintas tienen la misma ve- locidad de escape. Para encontrar este valor sustitui- mos en la ec. (14.33) los valores de C, rnT dados en las ecs. (14.8) y (14.9) así como el radio terrestre ( = 6.378 X I O 6 m), encontrando que
2 X 6.673 X Nm2/kg2 X 5.967 X kg 6.378 X I O 6 m
v, =
= 412.486 X I O 7 mz/s2
= 1.1174 X 104m/s
= 11.174 km/s = 40 227 kmih
En este cálculo no se ha tomado en cuenta el efec- to de la atmósfera sobre la partícula. Resulta que ésta produce un efecto de fr icción que implica que la velo- cidad de escape sea mayor que la que calculamos. Además, al tomar en cuenta el efecto de la atmósfera, resulta que la velocidad de escape ahora sí depende de la masa de la partícula
14.5. CASO DE U N A M A S A D I S T R I B U I D A U N I F O R M E M E N T E
En las secciones anteriores se obtuvieron algunas consecuencias de la aplicación de las leyes de New- ton y de la gravitación universal. En particular, esta úl t ima ley expresada en la ec. (14.2j es válida solamen- te cuando las masas son puntuales. Sin embargo, la aplicamos también al caso de cuerpos extendidos como planetas, satélites, etc. De hecho se ha tomado la fuerza gravitacional como s i se originara en el centro de masa del cuerpo extendido, y en consecuen- cia las distancias que se toman no son hasta la superfi- cie del cuerpo, sino hasta dicho centro. Hasta este momento no se ha demostrado que se pueda aplicar la ley tal cual a este tipo de cuerpos. De hecho New- ton se dio cuenta de este problema y no publ icó su monumental obra Principia durante 20 años hasta que obtuvo la solución de esta cuestión. En esta sección encontraremos la fuerza gravitacional que ejerce una esfera de masa uniformemente distribuida sobre un punto masa.
Consideremos en primer lugar una cáscara esférica de radio R, grueso h y de masa m distribuida uniforme- mente (fig. 14.16). Sea e la densidad de masa de la cás- cara (véase la sección 9.4). Supongamos que la par-
I
I
I
- P
Figura 14.16
tícula de masa M se coloca en el punto P fuera de la cáscara a una distancia D del centro de la cáscara. To- memos un anillo cuyo plano sea perpendicular a la lí- nea PC, a un ángulo 8 y de ancho angular dB. Por tan- to, el ancho del anillo es (R do).
Consideremos un elemento del anillo de largo dr (fig. 14.17a) centrado en un punto K arbitrario; este elemento es muy pequeño y se puede considerar como puntual.-La fuerza gravitacional dFK que este elemen- to ejerce sobre la masa M en P es un vector que t iene dirección a lo largo de la línea PK y sentido de P hacia K, ya que la fuerza es atractiva. Por otro lado, dia- metralmente opuesto al elemento que acabamos de escoger existe otro elemento en L, con la misma área que el anterior, que también ejerce una fuerza sobre la partícula en P, que llamamos dF, y que tiene direc- ción a lo largo de la línea PL y sentido de P hacia L. Dado que los dos elementos tienen la misma área, contienen la misma masa. Por tanto, las magnitudes de las fuerzas dFK y dF, son iguales (problema 14.1 6). La fuerza total ejercida por estos dos elementos dia- metralmente opuestos es entonces
dFK + dF, (I 4.34)
dr
Figura 14.17a
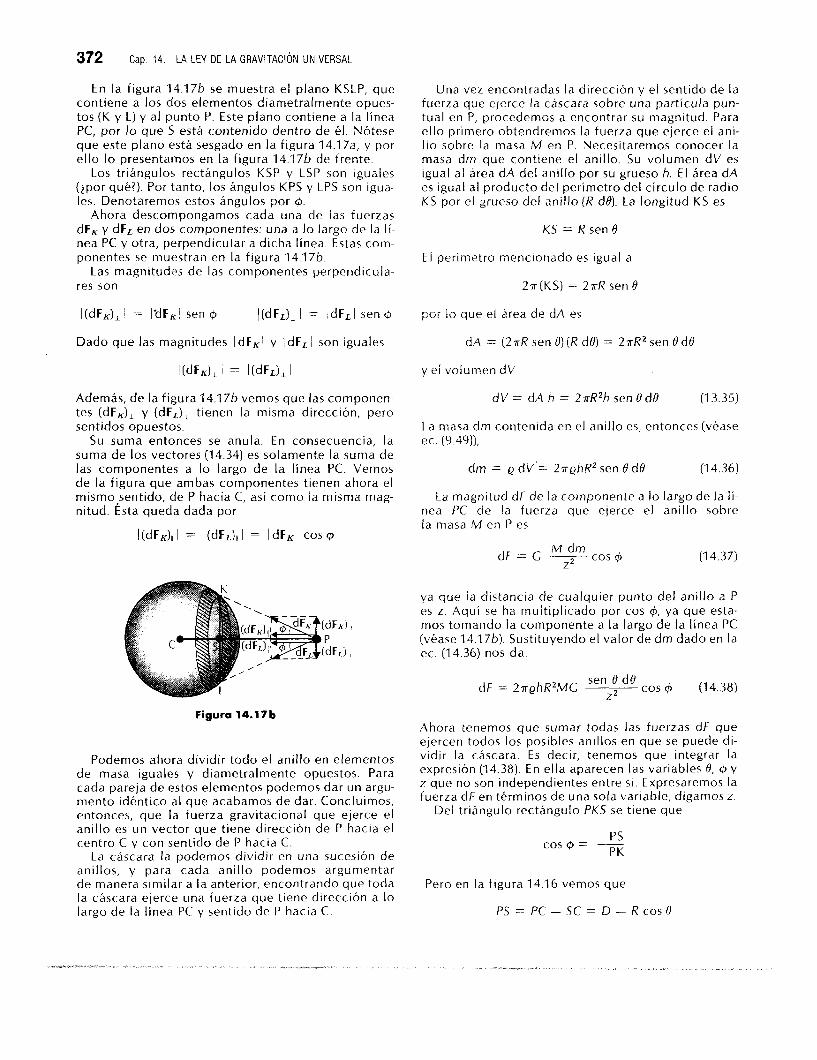
372 Cap. 14. LA LEY DE LA GRAVITACIóN UNIVERSAL
En la f igura 14.17b se muestra el plano KSLP, que contiene a los dos elementos diametralmente opues- tos (K y L) y al punto P. Este plano contiene a la línea PC, por lo que S está contenido dentro de 61. Nótese que este plano está sesgado en la figura 14.17a, y por el lo lo presentamos en la figura 14.176 de frente.
Los triángulos rectángulos KSP y LSP son iguales (ipor qué?). Por tanto, los ángulos KPS y LPS son igua- les. Denotaremos estos ángulos por 4.
Ahora descompongamos cada una de /as tuerzas dF, y dFL en dos componentes: una a lo largo de la Ii- nea PC y otra, perpendicular a dicha línea. Estas com- ponentes se muestran en la figura 14.17b.
Las magnitudes de las componentes perpendicula- res son
Además, de la figura 14.1 7b vemos que las componen- tes (dFK). y (dFL), tienen la misma dirección, pero sentidos opuestos.
Su suma entonces se anula. En consecuencia, Id suma de los vectores (14.34) es solamente la suma de las componentes a lo largo de la línea PC. Vemos de la figura que ambas componentes tienen ahora el mismo,sentido, de P hacia C, así como la misma mag- nitud. Esta queda dada por
I(dF& I = I(dFL)II I = I dFKI COS 4
Figura 14.17 b
Podemos ahora dividir todo el anillo en elementos de masa iguales y diametralmente opuestos. Para cada pareja de estos elementos podemos dar un argu- mento idéntico al que acabamos de dar. Concluimos, entonces, que la fuerza gravitacional que ejerce el anil lo es un vector que tiene dirección de P hacia el centro C y con sentido de P hacia C.
La cáscara la podemos dividir en una sucesión de anillos, y para cada anil lo podemos argumentar de manera similar a la anterior, encontrando que toda la cáscara ejerce una fuerza que tiene dirección a lo largo de la línea PC y sentido de P hacia C.
Una vez encontradas la dirección y el sentido de la fuerza que ejerce la cáscara sobre una partícula pun- tual en P, procedemos a encontrar su magnitud. Para ello primero obtendremos la fuerza que ejerce el ani- llo sobre la masa M en P. Necesitaremos conocer la masa dm que contiene el anillo. Su volumen dV es igual al área dA del anillo por su grueso h. E l área dA es igual al producto del perímetro del círculo de radio KS por el grueso del anillo (R dB). La longitud KS es
KS = R sen O
E l perímetro mencionado es igual a
27r(KS) = 2aR sen I9
por lo que el área de dA es
dA = (27rR sen 0 ) (R dB) = 2aR2 sen I9 d0
y ei voiumen dV
dV = dA h = 2aR2h sen BdB (1 3.35)
La masa dm contenida en el anil lo es, entonces (véase ec. (9.49)),
dm = Q dV'= 2aehR2 sen I9 d0 (14.36)
La magnitud dF de la Componente a lo largo de la I í - nea PC de la fuerza que ejerce el anillo sobre fa masa M en P es
d F = C - cos 4 M dm 22
(14.37)
va que la distancia de cualquier punto del anillo a P es I . Aquí se ha multiplicado por cos 4, ya que esta- mos tomando la componente a la largo de la línea PC (vease 14.17b). Sustituyendo el valor de dm dado en la ec. (14.36) nos da.
dF = 2aehR2MC sen 19 dB cos 22
(1 4.38)
Ahora tenemos que sumar todas las fuerzas dF que ejercen todos los posibles anillos en que se puede di- vidir la cáscara. E s decir, tenemos que integrar la expresión (14.38). En ella aparecen las variables O, 4 y z que no son independientes entre s í . Expresaremos la fuerza dF en términos de una sola variable, digamos z.
Del triángulo rectángulo P K S se tiene que
PS c o s 4 = ___ PK
Pero en la figura 14.16 vemos que
PS = PC - SC = D - R COS H

CASO DE UNA MASA DISTRIBUIDA UNIFORMEMENTE 373
Y
PK = z
por lo que
cos 4 = D - R COS e Z
(1 4.39)
Como siguiente paso usamos el teorema de los cose- nos de la trigonometría (véase ec. (13.124)) en el trián- gulo CKP, que no es rectángulo
Z' = D2 + R 2 - 2DR COS O (1 4.40)
En el miembro derecho de esta expresión sumamos y restamos D2 y luego factorizamos 2 0
z2 = R2 - D2 + 2D2 - 2DR COS O = R2 - D2 + 2D[D - R COS O)
De esta igualdad despejamos ahora ( D - R cos O), combinación que aparece en la ec. (14.39). Pasamos R2 y D2 al otro miembro (pasan con sus signos cam- biados) y luego dividimos entre 2 0 , obteniendo
D - R C O S O = z2 - R2 + D2
2 0 (1 4.41 )
Sustituyendo esta expresión en la ec. (14.39), obtene- mos que
cos q5 = z2 - R2 + D2 2 D z (1 4.42)
De esta manera hemos expresado cos q5 en términos de la variable z. Ahora haremos lo mismo para el án- gulo O. Tomemos la diferencial de ambos miembros de la ec. (14.40), usando la ec. (3 .25) y recordando que D y R son constantes
2z dz = 2DR sen O dO
y despejando sen 8 de
sen Ode= -z dz (1 4.43) 1
DR
Así encQntramos directamente la combinación (sen O dB) que aparece en la ec. (14.38) en términos de la va- riable z. Sustituyendo ahora las ecs. (14.42) y (14.43) en la ec. (14.38), obtenemos la fuerza dF en términos de z
dF = 2nehR2MC - DR z d z - 1 1 Z' - R2 + D2 2 2 2 Dz
Simplificando, se encuentra que
d f = C ___ RM [ I + D2s R 2 ] d ~ (14.44) D2
Ahora ya tenemos a d f en términos de una sola va- riable, z. En seguida integramos esta expresión. De la figura 14.16 vemos que para recorrer todos los anillos que se pueden formar con la cáscara, el valor de z tiene que ir de ( D - R ) que corresponde al punto A hasta el valor de (D + R ) que corresponde al punto 6. Por tanto, la magnitud F de la fuerza que experimenta la partícula de masa M en P es
F = C " - RM [1 + R2]dz (14.45) 0 2 13-R
Usamos ahora las ecs. (4.27) y (4.28) con n = 1 y n = - 2 , obteniendo
Efectuamos la evaluación entre los límites
f = C D + R - ( D - R )
- (D2 - R2) [ + - 1
R D - R
Ahora recordamos del álgebra que
D2 - R2 = ( D + R)(D - R )
por lo que
F = C ___ RM[2R - (D - R ) + D + R] 0 2
= C * RM(4 R ) D2
= c 47reR2h M 0 2
(1 4.46)
Como estamos suponiendo que la densidad de masa e es constante, de la ec. (9.53) vemos que la masa total m de la cáscara es
rn = eV siendo V su volumen. Pero este volumen es igual al área de la superficie de la esfera de radio R mult ipl i- cada por el ancho h
V = 4aR2h
por lo que la masa m es
m = 47reR2h
que sustituida en la ec. (14.45) nos da para f
f = C - Mrn D2 (1 4.47)
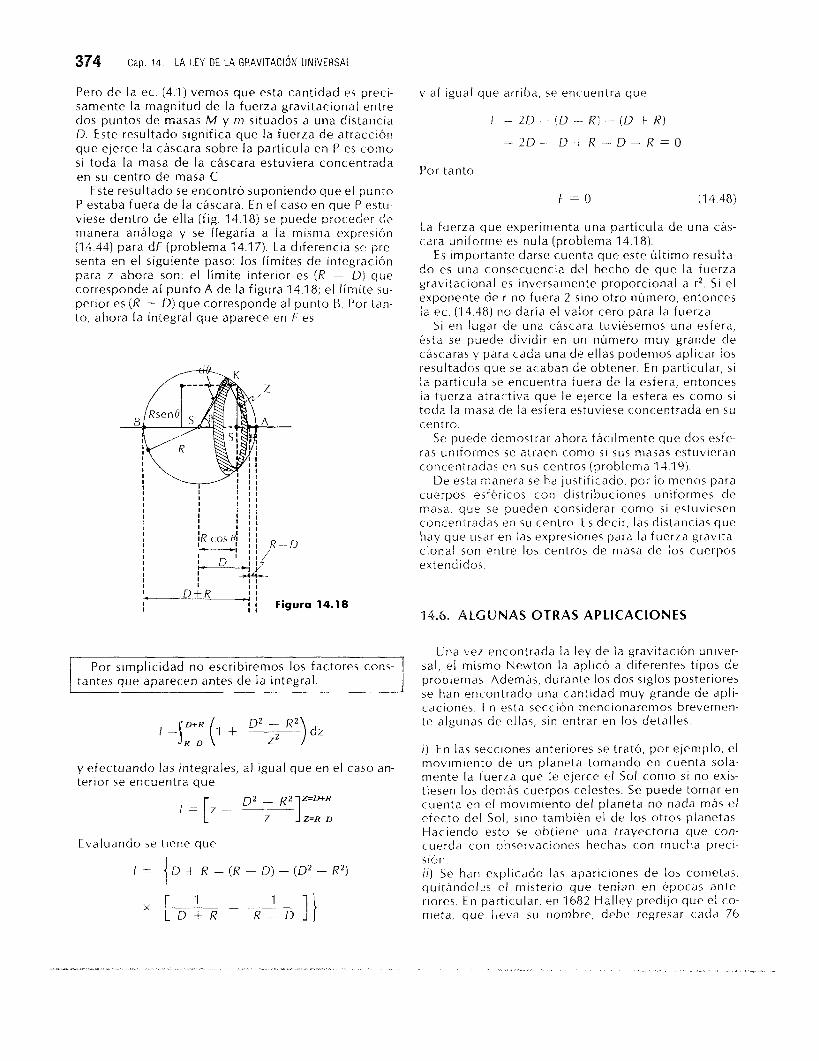
374 Cap. 14 LA LEY DE LA GRAVITACIóN UNIVERSAL
Pero de la ec. (4.1) vemos que esta cantidad es preci- samente la magnitud de la fuerza gravitacional entre dos puntos de masas M y m situados a una distancia D. Este resultado significa que la fuerza de atracción que ejerce la cáscara sobre la partícula en P es como si toda la masa de la cáscara estuviera concentrada en su centro de masa C.
Este resultado se encontró suponiendo que e l punto P estaba fuera de la cáscara. En el caso en que P estu- viese dentro de ella (fig. 14.18) se puede proceder de manera análoga y se llegaría a la misma expresibn (14.44) para dF (problema 14.17). La diferencia se pre- senta en el siguiente paso: los límites de integración para z ahora son: el límite inferior es (R - Di que corresponde al punto A de la figura 14.18; el límite su- perlor es (R + D) que corresponde a l punto B. Por tan- to, ahora la integral que aparece en F es
Por simplicidad no escribiremos los factores cons- tantes que aparecen antes de la integral.
D2 - R 2 ) dr R-D
y efectuando las integrales, a l igual que en el caso an- terior se encuentra que
/ = z- [ O2 - z R21z=D+R Z=R-D
Evaluando se tiene que
I = D + R - ( R - V ) - ( D Z - R 2 )
1 x [ V i R R - D
-
ai Igual que arriba, se encuentra que
= m -- (D -- R) -- (D + R)
= 2 D - - D + R - V - R =
Por tanto
F = O
O
(1 4.48)
La fuerza que experimenta una partícula de una cás- cara uniforrne es nula (problema 14.18).
Es importante darse cuenta que este último resulta- do es una consecuencia del hecho de que la fuerza gravitacional es inversarnente proporcional a r2. Si el exponente de r no fuera 2 sino otro número, entonces la ec. (14 48) no daría el valor cero para la fuerza.
Si en lugar de una cáscara tuviksemos una esfera, esta se puede dividir en un número muy grande de cáscaras y para cada una de ellas podemos aplicar los resultados que se acaban de obtener En particular, s i la partícula se encuentra fuera de la esfera, entonces la tuerza atrartiva que le ejerce la esfera es como si toda la masa de la esfera estuviese concentrada en su centro.
Se puede demostrar ahora fácilmente que dos esfe- ras uniformes se atraen como s i sus masas estuvieran concentradas en sus centros (problema 14.19).
De esta manera se ha justificado, por Io menos para cuerpos esféricos con distribuciones uniformes de masa. que se pueden considerar como si estuviesen concentradas en su centro. E s decir, las distancias que hay que usar en las expresiones para la fuerza gravita- cional son entre los centros de masa de los cuerpos extendidos.
14.6. ALGUNAS OTRAS APLICACIONES
Una vez encontrada la ley de la gravitaclón unlver- sal, el mismo Newton l a aplicó a diferentes tipos de problemas. Además, durante los dos siglos posteriores se han encontrado una cantidad muy grande de apli- caciones. En esta sección mencionaremos brevernen- te algunas de ellas, sin entrar en los detalles
i ) En las secciones anteriores se trató, por ejemplo, el movimiento de un planeta tomando en cuenta sola- mente la tuerza que le ejerce el Sol corno s i no exis- tiesen los demás cuerpos celestes. Se puede tomar en cuenta en el movimiento del planeta no nada más el efecto del Sol, sino también el de los otros planetas Haciendo esto se obtiene una trayectoria que con- cuerda con observaciones hechas con mucha precl- sión i i ) Se han explicado las apariciones de los cometas, quitándolds el misterio que tenían en epocas ante- riores. En particular, en 1682 Halley predijo que el co- meta, que l leva su nombre, debe regresar cadd 7h

años, aproximadamente. Encontró que s u trayectoria es una elipse muy alargada, que llega hasta mhs allA de la órbita de Neptuno. i i i ) Newton usó sus leyes para dar una explicac ~ b n de las mareas. Reconoció que este fenbmerw st1 debt I P V
esencia, a la atracción que ejerce la Luna, y ~n mt.;7or medida el Sol, sobre las masas de agua oceánlcas. i v ) Basándose en la ley de la gravitación universal se pudo predecir teóricamente la existencia, primero, del planeta Neptuno (en 1846) y posteriormente la de Plutón (en 1930). En particular, se predijeron sus ma- sas y sus posiciones, que fueron verificadas por obser- vaciones telescópicas.
Las anteriores son solamente algunas de las conse- cuencias de la aplicación de las leyes de Newton acompañadas de la expresión para la fuerza de la gra- vitación universal.
PROBLEMAS
14.1. Demuestre que las unidades para m, obtenida\ en la ec. (14.9) son efectivamente en kg. 14.2. Demuestre que las unidades para la fuerza en el ejercicio 14.1 son N. 14.3. Determine las unidades de la aceleración en el ejercicio 14.2 14.4. Obtenga las unidades de M en el ejercicio 14.5 14.5. Demuestre que las unidades de C en el S I son las dadas en la ec. (14.8). 14.6. Si la fuerza que la Tierra ejerce sobre la Luna es atractiva, ipor qué nuestro satélite no cae sobre el planeta? 14.7. Investigue la manera en que Cavendish realizó sus experimentos para confirmar la ley de la gravita- ción universal. En particular, cómo obtuvo el valor numérico de la constante C . 14.8. Calcule las aceleraciones de la gravedad en el polo y en el ecuador terrestres si los radios son: polar, 6 355.6 km; ecuatorial, 6 376.5 km. 14.9. Demuestre que la conservación del sentido del vector de momento angular implica que el planeta se mueve siempre en el rnismo sentido 14.10. Describa un posible método para obtener la masa de la Luna, enviando un cuerpo que quedara atrapado por s u atracción gravitacional y girara en una órbita como su satélite. 14.11. Demuestre a partir de la segunda ley de Kepler que S I la órbita de un planeta es circular, entonces el movimiento es circular uniforme. Sugerencia: recuer- de que la segunda ley de Kepler está asociada a la conservación del momento angular. 14.12. En la siguiente tabla se dan los valores del pe- riodo sideral T y de la distancia media R de varios pla-
de ( T 2 / R 3 ) . netas al Sol. Obtenga los valores correspondientes
Mercurio Venus Tierra Marte Júpiter Saturno Urano Neptuno Plutón
58 1 O8 149 228 778
1 426 2 869 4 495 5 900
14.13. Exprcse el miembro derecho de ia ec (14 16) con ¡a corrección debida al movimiento del Sol men- ciorlada < ~ i irnal (!ti la sección 14 11. Calcule ahora la cantidad qae nparcce en el miembro derecho de la ecuación, tomando las masas de los planetas dada., en la siguiente tabla.
Planeta M a s a (en unidades dt. k masa de la Tierra]
iVercurio Venus Tierra Marte 1 úplter Saturno Urano Neptuno
Compare con los valores que obtuvo en el problema 14 12. 14.14. Obtenga las unidades de la velocidad de esca- pe en el ejercicio 14 6 . 14.15. Demuestre que la fuerza de la gravi~c~ción tlni- versa1 es conservativa. Calcule los trabajos reaiizcldos al moverse un cuerpo entre dos puntos tiios a lo largo de dos caminos distintos. 14.16. Demuestre que las magnitudes de las fuerrds dF, y dFL de la figura 14.17 son iguales. 14.17. Demuestre que s i la partícula de masa M se en- cuentra dentro de la cáscara mostrada en la figura 14.18, entonces se obtiene la misma expresión (14.44) para dF 14.18. Una manera de ver que la fuerza que experi- menta una partícula dentro de una cáscara uniforme es nula es la siguiente. Con vértice r n la posición P de la partícula (fig. 14.19) torme u n doble cono de aber- tura muy pequeña que intercepta a la cáscara, tor- mando sobre ella las áreas A, y A,. Calcule Ids masas interceptadas por estas áreas. Muestre que la suma de las fuerzas que cada una de Ids masas contenidas en las áreas interceptadas ejercen sobre la partícula se anula. Ahora argumente lo necesario para hacer ver que la fuerza total de la cáscara sobre la partícula es cero. 14.19. Con base en lo demostrado en la sección 14 5, obtenga la fuerza con que se atraen dos esferas unifor- mes.

376 ,--.- y..
Figura 14.19
14.20. Una partícula de masa m se introduce dentro de una esfera sólida uniforme de radio R y masa M hasta una distancia r de su entro ( r < R).
a) iQué fuerza experimenta? b) )Cuál es la aceleración de la gravedad que se
ejerce sobre la partícula? c) i A qué profundidad la aceleración es igual a la
mitad de la que prevalece en la superficie? d) iCuál es la fuerza cuando la partícula está en el
centro de la esfera? Explique físicamente su re- sultado.
14.21. Uno de los satélites de Saturno, Mimas, recorre
una trayectoria prácticamente circular de 187 O00 k m de radio y tiene un periodo de 23 h. Calcule la masa de Saturno. 14.22. La masa del Sol es 1.965 X IO3O kg y su radio es 695 300 km. Calcule la aceleración de la gravedad en su superficie. 14.23. Calcule la aceleración de la gravedad en la su- perficie de la Luna. E l radio lunar es 1 738 k m y su masa es 7.35 x IOz2 kg. 14.24. Un satélite de comunicaciones terrestres debe ser "geoestacionario", es dec'ir, tiene que permanecer todo el t iempo en la misma posición sobre la Tierra. Esto significa que su periodo es de 24 h. > A qué altura sobre la superficie de la Tierra se le debe colocar? 14.25. Calcule la magnitud de la fuerza con que el Sol atrae a la Tierra. icon qué fuerza atrae la Tierra a la l u n a ? 14.26. En la sección 14.4 se encontró que la energía potencial asociada a la fuerza gravitacional es negati- va (véase ec. (14.29)). Dé una explicación física de este hecho. Recuerde que se ha tomado el cero de la ener- gía potencial en el infinito. Calcule el trabajo que se necesita hacer para llevar una partícula del infinito a una distancia r del centro que genera la fuerza. iQuién hace el trabajo?
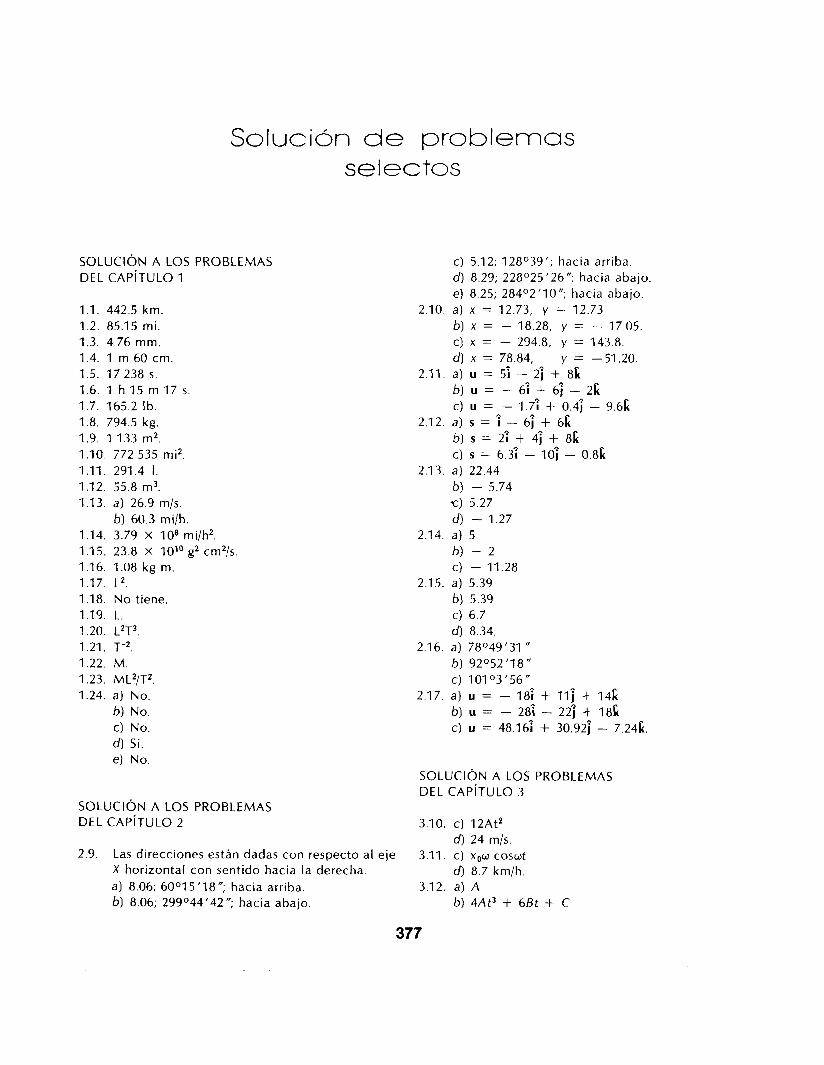
Solución de p r o b l e m a s s e l e c t o s
S O L U C I ~ N A LOS PROBLEMAS DEL CAPíTULO 1
1.1. 442.5 km. 1.2. 85.15 mi. 1.3. 4.76 mm. 1.4. 1 m 60 cm. 1.5. 17 238 s. 1.6. 1 h 15 m 17 s. 1.7. 165.2 lb. 1.8. 794.5 kg. 1.9. 1 133 m2. 1.10. 772 535 mi2. 1.11. 291.4 I . 1.12. 55.8 m3. 1.13. a) 26.9 m/s.
b) 60.3 milh. 1.14. 3.79 X I O 8 mi/h2. 1.15. 23.8 X 1010 g2 cm2/s. 1.16. 1.08 kg m. 1.17. L2. 1.18. No t iene. 1.19. L. 1.20. L2T3. 1.21. T-?. 1.22. M. 1.23. ML2/T2. 1.24. a) No.
b) No. c) No. d) Sí. e) No.
SOLUCIóN A LOS PROBLEMAS DEL CAPíTULO 2
2.9. Las direcciones están dadas con respecto al eje X horizontal con sentido hacia la derecha. a) 8.06; 60°15 ’18”; hacia arriba. b) 8.06; 299O44’42”; hacia abajo.
c) 5.12; 128O39’; hacia arriba. d) 8.29; 228O25’26”; hacia abajo. e) 8.25; 284O2’10”; hacia abajo.
2.10. a) x = 12.73, y = 12.73 b) X = - 18.28, y - 17.05. C) X = - 294.8, y 143.8. d) x = 78.84, y = -51.20.
b) u = - 6; + 6; - 2C c) u = - 1.7; + 0.4; - 9.6k
b) S = 21 + 4; + S& c) S = 6.31 - 10; - 0.8k
2.11. a) u = 5; - 2; + 8k
2.12. a) S = ; - 6; + 6k
2.13. a) 22.44 b) - 5.74 ‘c) 5.27 d) - 1.27
2.14. a) 5 b) - 2 C) - 11.28
2.15. a) 5.39 b) 5.39 c) 6.7 d) 8.34.
2.16. a) 78O49‘31 “ b) 92O52 ’1 8 ” c) 1OIo3’56”
2.17. a) u = - 18; + 11; + 14k b) u = - 281 - 22; + I 8 k c) u = 48.16; + 30.92; - 7.241;.
SOLUCIóN A LOS PROBLEMAS DEL CAPíTULO 3
3.10. c) 12At2 d) 24 mis.
d) 8.7 km/h.
b) 4At3 + 6Bt + C
3.11. C) x00 coset
3.12. a) A
377
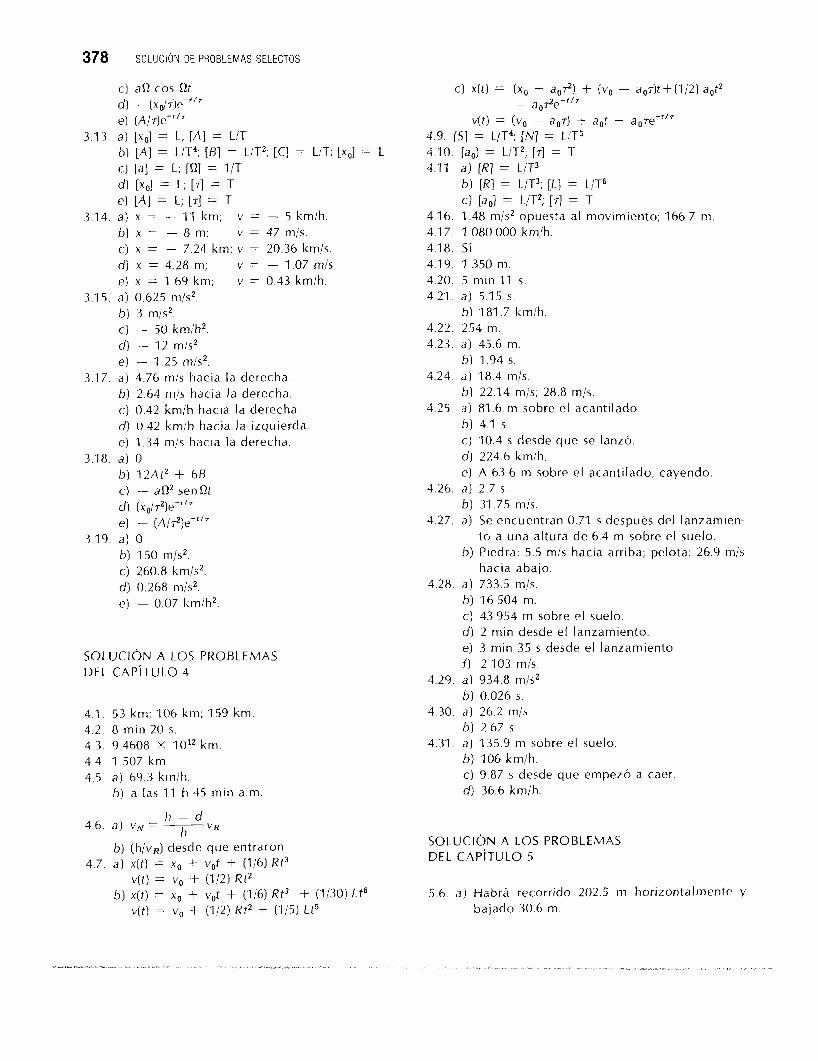
378 S O L U C I ~ N DE PROBLEMAS SELECTOS
c) all cos Rt d ) - - ( X O / ~ J ~ - " ~ e) (Ai7)e""
b) [A] = L/T4; [B] = L/T2; [C] = LjT; [xo] = L c) [a] = L; [a] = 1/T
e) [A] = L; [7] = T 3.14. a) x = -- 11 km; v = - 5 km/h.
b) x = -- 8 m; v = 47 mis. c ) x = -- 7.24 km; v = 20.36 kmis. d ) x = 4.28 m; v = - 1.07 mis e) x = 1.69 km; v = 0.43 km/h.
b) 3 mis2. c) - 50 km/h2. d ) - I 2 mis'. e) - 1.25 mis2.
3.17. a ) 4.76 m i s hacia la derecha. b) 2.64 mis hacia la derecha. c ) 0.42 km/h hacia la derecha. d ) 0.42 kmih hacia la izquierda. e) 1.34 m i s hacia la derecha.
3.13. a) [x,] = L; [A] = L/T
d ) [Xo] = L; [TI = T
3.15. a) 0.625 mis'.
3.18. a) O b) 1%At2 + 6B c) - aQ2 seni2t d ) ( ~ ~ / 7 ' ) t ? - ~ ' ~ e) - (A/7Z)e"''
b) 150 m/s2. c) 260.8 km/s2. d ) 0.268 mis'. e) - 0.07 kmih'.
3.19. a) O
SOLUCIÓN A LOS PROBLEMAS DEL CAPíTULO 4
4.1. 53 km; 106 km; 159 km. 4.2. 8 min 20 s. 4.3. 9 4608 X IO1* km. 4.4. 1.507 k m 4.5. a) 69.3 km/h.
b) a las 11 h 45 min a.m.
4.6. a) VN = -- h - d
h vR b) (h/vR) desde que entraron
4.7. a ) x(t) = x, + vot + (1/6) Rt3 v(t) = v0 -t (1/2) Rt'
v( t ) = v, + (1/2) Rt2 + (115) Lt5 6) x(t) = x, + v,t + (1/6) Rt3 + (1/30) Lt6
c ) x ( t ) = (x, + a,?) + (v, - ao-r)t+(1/2) aot2 - aO72e""
4.9. [ S ] = LIT4; [N] = L/T5
4.11 a) [R] = LIT3
v(t) = (va - ao7) + a,t + a , ~ e - " ~
4.10. [a,) = LIT2; [TI = T
b) [R] = LIT3; [L ] = LIT6 c) [ao] = L/T2; [ T I = T
4.16. 1.48 m/s2 opuesta al movimiento; 166.7 m. 4.1 7 1 080 O00 km/h. 4.18. S í 4.19. 1 350 m. 4.20. 5 min I 1 s. 4.21 a) 5.15 s.
4.22. 254 m. 4.23. a) 45.6 m.
4.24. a ) 18.4 mis.
4.25. a ) 81.6 m sobre el acantilado.
b) 181.7 km/h.
b) 1.94 s.
b) 22.14 mis; 28.8 m/s.
6) 4.1 s . c) 10.4 S desde que se lanzó. d) 224.6 km/h. e) A 63.6 m sobre el acantilado, cayendo.
b) 31.75 mis. 4.26. a ) 2.7 s .
4.27. a) Se encuentran 0.71 S después del lanzamien-
b) Piedra: 5.5 mis hacia arriba; pelota: 26.9 mis to a una altura de 6.4 m sobre el suelo.
hacia abajo. 4.28. a ) 733.5 mis.
b) 16 504 m. c ) 43 954 m sobre el suelo. d ) 2 min desde el lanzamiento. e) 3 min 35 S desde el lanzamiento. f ) 2 103 mis.
4.29. a) 934.8 mis' b) 0.026 s.
4.30. a ) 26.2 mis. b) 2.67 s.
4.31. a) 135.9 m sobre el suelo. b) 106 km/h. c ) 9.87 S desde que empezó a caer. d ) 36.6 km/h.
SOLUCIóN A LOS PROBLEMAS DEL CAPíTULO 5
5.6. a ) Habrá recorrido 202.5 m horizontalmente y bajado 30.6 m
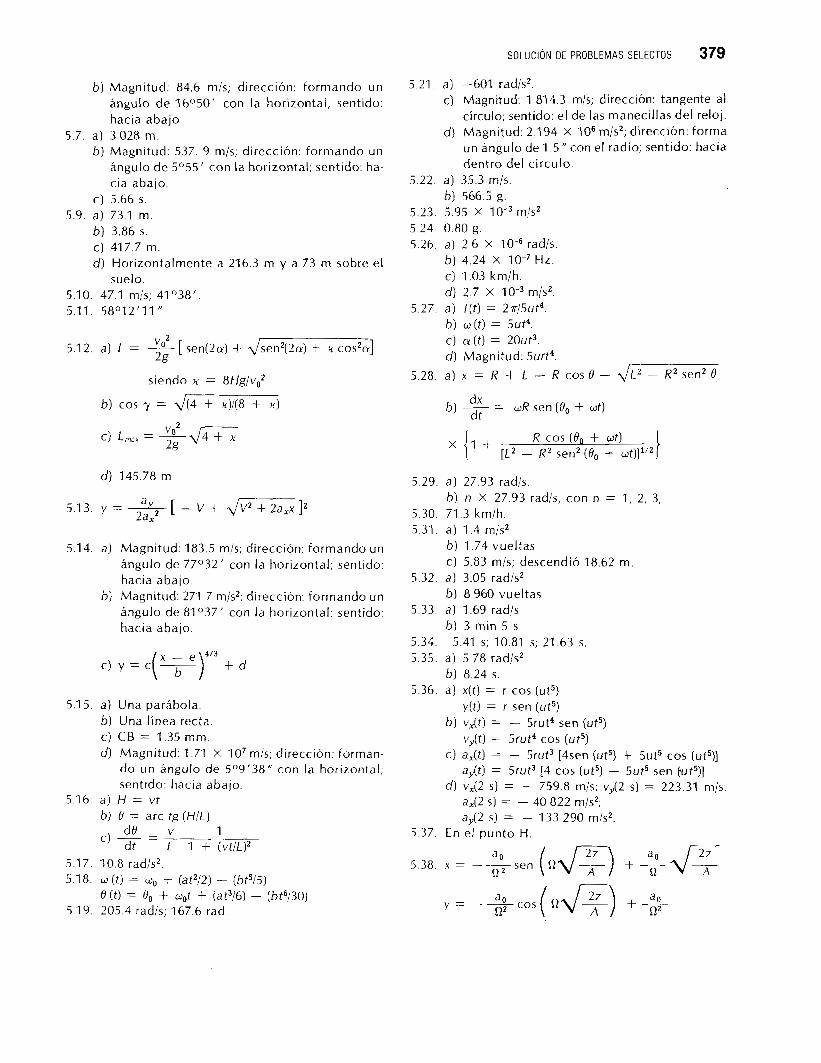
SOLUCIÓN DE PROBLEMAS SELECTOS 379
b) Magnitud: 84.6 mis; dirección: formando un ángulo de 16O50’ con la horizontal; sentido: hacia abajo.
5.7. a) 3028 m. b) Magnitud: 537. 9 mis; dirección: formando un
ángulo de 5O55’ con la horizontal; sentido: ha- cia abajo.
c) 5.66 s.
b) 3.86 s.
c) 417.7 m. d ) Horizontalmente a 216.3 m y a 73 m sobre el
suelo. 5.10. 47.1 mis; 41O38’ 5.11. 58O12’11 ”
5.9. a) 73.1 m.
5.12. a) L = l[ sen(2oc) + Z/sen2(20() + Y cos2a] v 2 2g
siendo M = 8Hg/vo2
b) cos y = d ( 4 + ~ ) / ( 8 + w)
d ) 145.78 m
5.13. y = ay [ - v + . J v 2 + 2 a , x ] 2 2ax2
5.14. a) Magnitud: 183.5 mis; dirección: formando un ángulo de 77O32‘ con la horizontal; sentido: hacia abajo.
b) Magnitud: 271.7 mis2; dirección: formando un ángulo de 81 O37’ con la horizontal; sentido: hacia abajo.
5.15. a) Una parábola. b) Una línea recta. c ) C B = 1.35 mm. d ) Magnitud: 1.71 X I O 7 m/s; dirección: forman-
do un ángulo de 5O9‘38” con la horizontal; sentido: hacia abajo.
5.16. a) H = vt b) 0 = arc tg (HIL)
de - v 1 dt L 1 + ( V ~ / L ) ~
c) - ”
5.17. 10.8 rad/s2. 5.18. w ( t ) = w0 + (at2i2) - (bt5/5)
5.19. 205.4 radis; 167.6 rad. e ( t ) = o0 + wot + (at3/6) - (bt6130)
5.21. a ) -601 rad/?. c) Magnitud: 1 814.3 mis; dirección: tangente al
círculo; sentido: el de las manecillas del reloj. d) Magnitud: 2.194 x I O 6 m/s2; dirección: forma
un ángulo de 1.5” con el radio; sentido: hacia dentro del círculo.
5.22. a) 35.3 m/s. b) 566.5 g.
5.23. 5.95 X misz. 5.24. 0.80 g. 5.26. a) 2.6 X rad/s.
c) 1 .O3 km/h. d ) 2.7 X mis2.
5.27. a ) T(t) = 2.1r/5ut4.
b) 4.24 X 10-7 HZ.
b) w ( t ) = 5Ut4. c) cy ( t ) = 20ut3. d ) Magnitud: 5urt4.
5.28. a) x = R + L - R cos 0 - J L 2 - R 2 sen2 0
b) - dx - - u~ sen (eo + wt ) dt
5.29. a) 27.93 radis.
5.30. 71.3 km/h. 5.31. a) 1.4 mis2
b) n X 27.93 radis, con n = 1, 2, 3,
b) 1.74 vueltas c) 5.83 mis; descendió 18.62 m.
5.32. a) 3.05 rad/$ 6) 8 960 vueltas
5.33. a) 1.69 rad/s b) 3 min 5 S
5.34. 5.41 S; 10.81 S; 21.63 s. 5.35. a) 5.78 rad/s2
5.36. a) x(t) = r cos (u t5) y ( t ) = r sen (ut5)
b ) v,(t) = - 5rut4 sen (ut5) vJt) = 5rut4 cos (ut5)
c) a,(t) = - 5rut3 [&en (ut5) + 5ut5 cos (uts)] a,(t) = 5rut3 [4 cos (ut5) - 5ut5 sen fut5)]
d ) v,(2 S) = - 759.8 mis; vy(2 S) = 223.31 mis. a,(2 S) = - 40 822 m/s2; a,(2 S) = - 133 290 mis2.
6) 8.24 s.
5.37. En el punto H.
380
SOLUCIóN A LOS PROBLEMAS DEL CAPíTULO 7
7.1. a) 312.5 N b) 0.047 N c) 6.3 x 10-4 N
7.3. a) 1.41 mis2. b) 54.04 m/s2. c) 25.5 rn /s2 .
7.4. a) 62.5 kg. b) 0.487 kg. c) 58.06 kg.
7.6. En Júpiter: 234.3 kg; en Mercurio: 33.6 kg. 7.10. 7.1 2. 7.1 7.
7.18.
7.20.
7.21.
7.23. 7.24. 7.25. 7.27. 7.28. 7.29. 7.30. 7.31.
7.32.
7.33.
83%. 0.0667 rad 15O23'
rn sen 8 - M Mm a =
m + M = m + M g(sen 8 + 1)
E l cuerpo pesado baja y el ligero sube; 4.05 m/s2; 26.41 kg.
F1 2 M m
m + M
E l cuerpo pesado baja; 0.213 m/s2; 46 g Habrá bajado 5.38 m. 0.366 m; 0.733 m.
383 kg. 12 m. 87.5 kg. S i m, sen O2 > m, el cuerpo m, sube;
F, = 31.2 N, F, = - 52 N.
A = m, sen O2 - m, sen 8, m, + m2
g;
T = m, g (sen 8, + sen 0,) m, + m2
A = F m, + m2 + m3'
1, =
1, =
m1 m, + m2 + m3 F;
m, + m2 F m, + m, + m3
1 2 = T,/2
7.34. 2.94 m/s2; 188 g; 94 g.
7.36. 390 kg. 7.37. 4.2 kg. 7.38. 525 kg. 7.39. Sobre el bloque 1: 3.46 kg, formando un ángulo
7.42. No resbala. 7.43. E I cuerpo pesado baja; I .O8 m/s2; 40 kg. 7.44. E l cuerpo 1 se mueve hacia arriba; 283 rn/s2; 16
7.45. 0.478 m/s2; 424 g; 212 g. 7.48. 4.48 m/s2; 0.072 kg. 7.50. 0.064. 7.51. 1.65 S; 7.28 m/s. 7.53. F = ( M + m) g (tg 8 + p ) . 7.55. 102.3 km/h. 7.56. 5O2'. 7.57. 44.56 rpm. 7.58. 7.67 m/s; 4 kg. 7.59. 33.25 rpm. 7.60. 10.1 kg. 7.61. Centrípeta: 8.7 kg; tangencial: 0.46 kg. 7.62. 0.69; 4 197 kg.
de 30° con la vertical y sentido hacia arriba.
kg.
SOLUCIóN A LOS PROBLEMAS DEL CAPíTULO 8
8.3. 7616 J . 8.4. 2 234.4 J .
8.5. 177.2 J . 8.6. a) 2 243 J .
b) 15.3 kg. c) 1.025 d ) - 2243 J .
8.9. a) 1 327.6 J ; - 346.6 I; - 981 J .
8.10. a) 21.22 m. 6) 17.3 km/h.
8.11. a) 255 486 I .
c ) 62.3 km/h. 8.12. a) 1 847.3 J .
b) 32.76 J .
c) 113 km/h.
b) 4.07 m/s.
b) 146.93 J . c) 100.8 km/h.
bl 0
b) -188130. 6 J.
8.13. a) 0.388
8.14. a) I 583.45 J .
SOLUCIÓN DE PROBLEMAS SELECTOS 381
8.1 5. 146.9 km/h. 8.16. 244 502 J. 8.17. O; no cambia. 8.19. h 8.20. a) (4gr)”’
8.21. 19.5 km/h. 8.22. a) 1.71 mis.
b) 29.4 cm. c) 54O27’44“
8.23. U(x) = ni(2x‘) 8.24. a) F(x) = - 6x + (314)~’
b) O; 8 m. 8.28. 1.966 hp. 8.29. 3 días 1 h 40 s. 8.30. 2 min 31.6 s. 8.31, a) 0.33 kwatt-h.
b) 0.08 hp. 8.32. a) F = (fL,)/(L, + L,)
b) (v2 - 4gr)“,
bl t1 + (M,)I c) F = (fL,)/[(L, + L,) cos 01
8.33. a) 35.67 kg. b) 12
8.34. (Rir) 8.35. (rJrJ3 8.36. 500 kg; 2 8.37. a) = (f/2mt)1’2 8.38. a) 25.75 m.
8.39. U(r) = - k/(2r2) 8.41. ( l /sen O).
b) 6.04 mls’.
SOLUCIóN A LOS PROBLEMAS DEL CAPíTULO 9
9.1. a) 2 828 km/h. 9.5. En la línea que une a las masas y a 2.87 m de la
masa ligera. 9.6. En la línea que une a las masas y a la distancia de
[(m, + mJh, + m,h,]/M de la masa m,. 9.7. A una distancia horizontal de 1.33 m a la izquier-
da del vértice recto y a 1 m vertical del mismo vértice.
9.8. A una distancia horizontal de 3.21 m a la derecha de la partícula de 8 kg y a 2.75 m vertical de la misma partícula.
9.9. [e] = M/L3; unidades de e = kg/m3. 9.11. 26.21 kg/m3. 9.12. 4.48 kg. 9.15. a) (3.14 m, 1.98 m).
b) (2.44 m, 1.98 m) c) (2 m, 0.7698 m).
d) (2 m, 1.5 m). e) (2.22 m, 1.676 m). f) (4H/3T, 4H/3T).
P
(o1 en radianes). i) (O, - 12.43 cm).
9.16. En el centro de la esfera. 9.20. Se mueve con velocidad V dada por,
9.22. 2.69 mis. 9.23. 35.83 m. 9.24. a) (m,L)i(m. + m,).
9.25. 28.93 km/h. 9.26. a) 0.225 m.
b) En su posición inicial.
b) 0.21 s. c) 0.42 S desde que salió. d ) 2.1 m/s dirigida hacia abajo.
9.28. 28.4%
c) 64% 9.30. Ambas esferas se mueven con el mismo sentido
que inicialmente tenía la partícula más pesada, con velocidades 1.87 mis y 2.37 mis.
9.33. La esfera de la derecha sube 3.9 cm. 9.34. 5.02 X j y 0.057 J . 9.35. a) Ambas se mueven con el mismo sentido en el
que inicialmente se movía la partícula pe- sada.
b) 45.2%. c) La partícula pesada. d ) 52.4%.
9.36. a) Las partículas se separan vl’ = 8 mis; v,’ = 1.743 mis.
b) Las partículas se mueven con la misma direc- ción y sentido que inicialmente tenía la par- tícula ligera, vl’ = 11.075 mis; v,’ = 0.175 mis.
9.37. Sí es posible. 9.38. a) Magnitud: 1.57 mis; dirección: la misma en la
que se separa la otra partícula; sentido opuesto al de la otra partícula.
b) Es nula.
382 SOLUCiÓN DE PROBLEMAS SELECTOS
SOLUCIÓN A LOS PROBLEIMAS DEL CAPíTULO 11
939. 4.7 mis. 9.41. a) Kz < K1 3.43. 246 km/h.
SOLUCIÓN A LOS PROBLEMAS DEL CAPíTULO 10
10.4. Todas son iguales con magnitud 510 kg m .
10.7. 1 I , ~ = 414.2 kg m2/s. I 1 2 i = 207.2 kg m2/s. 1 I,/ = 207.3 kg m2,is. 11,; = 127.2 kg m2/s.
b) - 426; - 4207 + 2666 (en g cm2/s). c) o d ) - 305.2; + 97.027 + 64.686 (en mg mm2,;s).
10.9. a) 62.43 kg m2]s. b) 79.22 kg m2is.
10.11. 1291 kg m. 10.12. Magnitud: 1.995 kg m; dirección: perpendicu-
lar al plano de la polea; sentido: hacia adentro. 10.1 3. Magnltud: 204.06 kg m; dirección: perpendicu-
lar al plano; sentido: hacia afuera. 10 14 . Magnitud: 22.56 kg m; dirección. perpendicular
al plano de la figura; sentido: hacla c i i w r a 10.15. 9 712 71 + 647.6; - 4127.96 (en kg m). 10.16. T~ = - 451.1; + 300.7c (en kg m).
TA = - 169.2; - 413.51 -- 789k (en kg m ) .
10.17. Magnitud: 11.4 kg m; dirección: perpendicular al plano de la figura; sentido: hacia afuera.
10.18. ro = -62 419; + 69 3551 -- 48 O1 5k (en kg m). T~ = - 62 4191 - 48 Ol5& (en kg m).
10.19. ro = - 16.131 - 3.771 (en kg m). 10.20. TB = 42.051 + 11.20; - 18.20c (en kg n l j .
rc = - 20.251 - 14.406 (en kg m). 10.21. T A = 5.78; + 6 817 + 1 3.h26 (en kg m).
T~ = 5.781 + 13.62; + 13.62k (en kg m). 10.22. T~ = -15.17; -t 23 131 - 14.57k (en kg m). 10.23. Magnitud: 704 kg m; dirección: perpendicular al
10.25. a) v, = 6.8 mis; v , = 1.7 mis.
10.8 a ) 31 + 1261 + 78k (en kg m2/s).
plano de la figura; sentido: hacia afuera.
b) 404 kg m2/s. 10.26, VA^ =; 6.79; VA,, = 21.91
VS, == 2 34; vHz -= 13.11 VC,. 1 - 5.79; vez =z 133.75 en m!s.
10.27 a) 1.97 m/s, formando un ángulo de 66O2’ con la línea Q S .
b) a 0.457 m d e K .
b) ( + - $ ) M H z
1 d ) - M(RI2 + R2’) - 7 M 16 (RI2 + R I R z + RZ2)’ 2 97r (R, + RJ2
11 10. a) 10202 g mm2. b) 7 069.8 g mm2 c) 28 682.7 g mm2. d) 83 907 g mm2. e) 103 588 g mm?
11 11. (rn1Hl2 + mzHz2)/2. 11 13. 79.524 kg cm2 11 18. 17.04 rad/s2; 32.77 rad/s2. 11 19. 32.16 rad/s2. 11.20. 112 kg. 11.21 b ) al = 9.48 rad/s2;
a2 = 2.03 rad/s2. c) 5.35 s. d ) w1 = 17.65 radis;
w2 = 10.86 radis. e) Inicial: K , = 1 496.3 J; K2 O; f = 1 496.3 I ;
final: K , = 99 69 I ; K Z = 286.6 I ; E = 386.28 J .
f) Sobre 1: 1 396.63 J; sobre 2: 286.6 J .
11 2 5 TI = rng ZM + (m,/2)
M + m + (rn,,i2!
?-, = Mg __ 2rn + (m,,i2)
M +- m + (m,,i2i
11 26. a) 2.493 mis2 b) 7.12 rad/s2. c) 17 56 kg; 17.67 kg. d ) 1 .3%.
6) al=a I-f,;a2 = 01 Hz 11 29. a) a = (M2H2 - MIHl)g/I‘
C ) T,=M,T’g
x [(M2+m2/2)HZ2+M2H1H2+(rnl~12/2)1
x [ (M, + rnl/2)Hl2 + MIH,H, + (rnzHZ2/2)1
r = [(M,+ rn1i2)HI2 + ( M ~ -t m,/2)H,2]-1
T, = M,rg
con
11.30. a) 373.9 mis2. b) 9.99 radis2.
SOLUCIÓN DE PROBLEMAS SELECTOS 383
11.31. b) 3.81 rad/s2. c) 0.53 mis2. d) 184.5 kg. e) 8.26 s. f) 20.66.
11.32. b) a, = 0.91 m/s2;a2 = 0.57 mis2.
11.38. a) ML2/12. C) T , = 89.9 kg; T , = 17.3 kg.
b) M(a2 + bz)/l 2. c) 3Mh2/10. d) M(HZ2 + H12)/2.
11.39. a) Sobre el eje J J ‘ a la mitad b) 15.50 kg m2,
11.40. 0.069 kg m,. 11.42. 72.1 25 kg cm2. 11.46. a) Uniformemente acelerado hacia abajo, con
giro alrededor del eje. b) 6.53 mis2. c) 7.35 m. d ) 13.9 rad/s2. e) 20.85 rad/s. f ) 2.33 kg.
11.47. 35O45’14”; 3.81: mis2. 11.48. 3.1 m. 11.49. O I H I 35.84 cm. 11.52. a) 1 .I 76 mis2.
b) 73.5 rad/s2.
d) 0.0536 mis. e) 1.34 radis.
11 .56. a) 1 .S9 mis2. 6) 5.88 rad/s2. c) 1.95 s. dl 15.13 m. e) 6.2 mis. f ) 11.48 rad/s.
b) 4.41 radis2. c) 2.34 s. d ) 17.43 m. e) 5.58 mis. f ) 10.33 rad/s.
C) 2.6 x 10-3 S.
11.57. a) 1.59 mis2.
SOLUCIóN A LOS PROBLEMAS D E L CAPíTULO 12
12.7. T = Picos a; R = P tg (Y. 12.8. 29.7 kg. 12.9. C : 45.6 kg; horizontal hacia la derecha
D: 47 kg; vertical hacia arriba. E: 49.4 kg; a lo largo de la línea AB.
F: 45.6 kg; horizontal hacia la izquierda. 12.10. AC: 31.48 kg; BC: 48.23 kg; CD: 62 kg. 12.11. a) cy = 78O3’: 0 = 25O5’.
b) Sobre A: 13.46 g; sobre 6: 135.9 g. 12.12. Magnitud: 2.60 kg; dirección: 19O8’41 “ con la
horizontal; sentido: hacia arriba. 12.13. Magnitud: 160 kg; vertical y sentido hacia aba-
jo; a 3.44 m del extremo izquierdo. 12.14. 79.5 kg.
12.1 5. a) 375 kg. b) Magnitud: 645.2 kg; dirección: con la hori-
zontal 54O27’44”, sentido: hacia arriba. 12.16. a) I9 = 9O0 - 2y + n X 360° (con n tal que
O I I9 5 360O). b) A: P cos y; 6: P sen y; en ambos casos con di-
rección perpendicular a la tabla. 12.1 7. C: 248. 26 kg; A: 501.74 kg ; ambas verticales y
con sentidos hacia arriba. 12.19. A. 100 kg; E: 100 kg; ambas verticales y con
12.20. a) cos cy = (D - L cos @/d.
12.21. sen I9 = (2h/L)1’3 12.22. 570 kg. 12.23. a) 1.33 m.
sentidos hacia arriba.
b) 7 = P cos 0 /[2 sen (a - O)].
b) Magnitud: 2 899 kg; forma un ángulo de 91 40’42” con la viga; sentido: hacia arriba.
12.24. A: 322 kg, vertical con sentido hacia arriba. 9: 298.2 kg; dirección: formando un ángulo de
157O44’ con la horizontal; sentido: hacia arriba.
12.25. DF: 53.81 kg; en tensión;
12.26. AB: 1 5 kg; en compresión; DE: 54 kg; en tensión;
BD: 44.14 kg; en compresión; BC: 22.5 kg; en tensión; AD: 21.2 kg; en tensión; DC: 30 kg; en tensión; CF: 22.5 kg; en tensión; AE: 27.5 kg; en compresión; DE: 22.93 kg; en compresión; E F : 17.5 kg; e n tensión; EH: 31.82 kg; en compresión; HF: 24.75 kg; en compresión; FC: 40 kg; en tensión; CH: 35 kg; en tensión; CJ: 40 kg; en tensión; HJ: 56.57 kg; en compresión,
12.27 O 5 W I 537 kg. 12.28. a l A: 156.67 kg; B: 273.33 kg; ambas verticales
y con sentidos hacia arriba.
384
12.29.
12.30. 12.31.
12.32. 12.33.
12.34.
12.35.
SOLUCIóN DE PROBLEMAS SELECTOS
b) AC: 180.91 kg; en compresión; AE: 90.45 kg; en tensión; CE: l65.5 kg; en Compresión; CD: 7.7 kg; en compresión; DE: ‘165.5 kg; en tensión; EB: 75.05 kg; en compresión; BD: 273.33 kg; en compresión; BF: 75.05 kg; en compresión; FD: 150.1 kg; en tensión.
A: 14 738 kg; vertical hacia abajo; B: 26 738 kg; vertical hacia arriba. 520 kg. A: 42.55 kg; B: 74.45 kg; ambas verticales y con sentidos hacia arriba. 38.3 kg. No; llega a 4.5 m desde B; le faltan O.b nl para llegar a A. a) 36.16 kg; en tensión. b) 26.82 kg; en tensión. T = 12.62 kg; R = 3.9 kg.
I E = --(mvo2 2 + kxO2)
13.18. No ocurren oscilaciones.
13.19. 271. Jm!2k 13.20. I O km/h. 13.21. a] vc = VE = 5.80 mis; vD = 5.04 mis.
-
b) Fc = FE = 2.25 kg; fD = 1.70 kg; las direc- ciones son radiales y con sentidos hacia el centro.
13.22. 35 cm. 13.23. 32.7 cm. 13.14. .u, = 0.306; pd =I 0.175. 13.26. [c] = M/T; unidades de c = kgis;
[q! = 1/T; unidades de q = radjs. 13.27. a) Comprimido a 0.93 cm de su posición de
equilibrio; 3.4 cm/s comprimiéndose; 8.1 cmis2 con sentido de estiramiento.
b) 0.024 1; 0.037 J; 0.061 J .
c) 23 cm; energía potencial; 22.60 J .
d ) 47.2 cm/s comprimiéndose; 0.25 S; 4.78 J .
SOLL‘CION A LOS PROBLEMAS 13.28. a) Comprimido a 4.2 cm de s u posición de
DEL CAPíTULO 13 equilibrio; 34.4 cm/s estirándose; 24.2 cm/s2
13.1. 587.25 N. 13.12. 4.46 rad/s; 1.41 S; 0.71 Hz. 13.13. a) Comprimido a 15.6 cm de SU posición de
equilibrio; 75.36 cm/s estirándose; 309.9
con sentido de compresión. b) 2.55 J; 0.739 J; 3.289 J .
13.29. a) Estirado a 2.3 cm de su posición de equilibrio; 41.2 cmis comprimiéndose; 82 cm/s2 con sentido de estiramiento.
cm/s2 con sentido de estiramiento. 12.21 J; 10.39 J ; 22.60 J .
23 cm; energía potencial; 22.60 J .
1.025 m/s; energía cinética; 22.60 J .
Estirado a 56.9 cm de su posición de equilibrio; 373.8 cmis estirándose; 1 130 cm/s2 con sentido de compresión. 300 J; 138 J; 438 J . 1 .O1 m; energía potencial; 438 J .
4.52 m/s; energía cinética; 433 J .
Compiimido a 88.1 cm de su posición de equilibrio; 223 cm/s comprimiéndose; 1 750 cm/s2 con sentido de estiramiento. 107 J; 331 J; 438 J .
b) 3.64 J ; 0.226 J; 3.87 J .
13.32. 6.54 s. 13.34. A = 0.96 m; e = O; j = 3 d 2 . 13.38. e = 25O20’46”; j = 295O20’46“. 13.39. e = 171O42’; i = 8‘1O42’. 13.41. a ) 7.49.
b) 0.94 m. c) e = 12020’33‘’; i = 282O20’33” (j) AT = 0.04 S; AT = 0.81 s. e) 4.57%.
13.45. 24.8 cm. 13.46. 1.55 cm. 13.47. 2.31 “C.
1.01 m. d) 4.52 m/s. 13.49. x>2Xsi <+U<%< 2/2w
1 2
X sen2wt - 2xovow sen at cos wt]
13.16. K = - m [voz cos2 wt + xo2 w2 x <2x s i U d <
U = - k [X? cos2wt + - 1 VOZ
i 3 2 2
X sen2wt + 2- x o v ~ sen ut cos wt ]
o bien do> J2w‘
W Aquí w2 = g/L.
385
13.50. a) T = 2 a ,,/4a2 + b2 bag
b) a = b/2
13.53. a) 2.1 s. b) 2.40 m i s
I
13.54. T = a d ? 13.55. a) 1.42 kg m2.
b) No está balanceada
SOLUCION A LOS PROBLEMAS DEL CAPíTULO 1 4
-14.8. Polar: 9.856 misz; ecuatorial: 9.791 m/s2
14.20. a) F = (y) r con dirección radial y sentido hacia el centro
c) Ri2 40
14.21. 5.6429 X IOzs kg. 14.22. 271.23 m/5:.
14.23. 1.62 mis2. 14.24. 35845 km. 14.25. FST = 3.59 X IOz1 kg.
FLT = 2.02 X kg

Apendices

APÉNDICE I
Se tiene la siguiente ecuación
P = au ( I . l j
y se quiere despejar u. En el lado derecho de [ ¡ . I ) a está mult ip l icando a u . Para despejar u, dividimos am- bos lados de la ec. (1.1) entre a
ya que ala = l . Por tanto,
P a
L, = -
APÉNDICE 1 1
Se tiene l a siguiente ecuación
v se quiere despejar v. En e l lado derecho de (11.1) b est2 dividiendo a v. Para despejar v, multiplicarnos ambos lados de la ec. (11.1) por b
APÉNDICE 111
La.- raíces de la ecuación cuadrática
ax2 + bx + c = o
S O t l
(11.2)
(111.1)
(111.2)
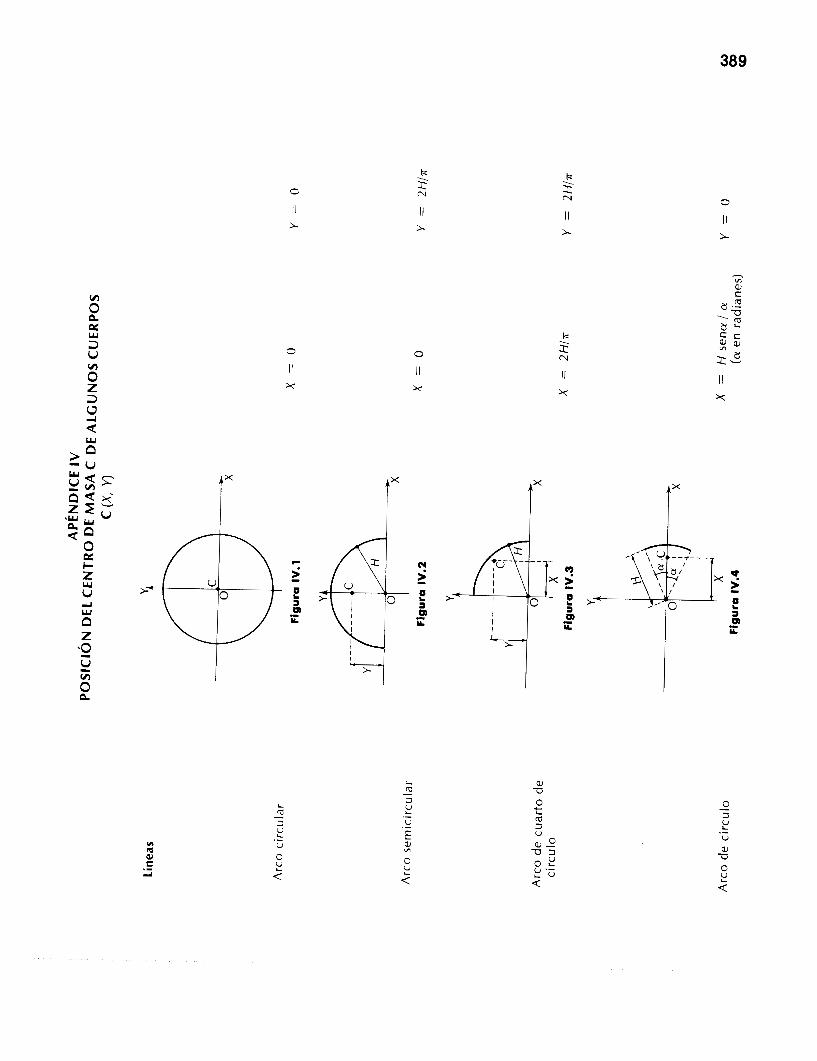
389
k
c Z
U w
-I u n
O
I I r
O
I 1 Z
. k
5 I / r
O
I 1 x
X
1
. k
z I I Z
hl
r q ?"- - " -
I I o f I P I Y
-
? D a,
O Y
O
I 1 r
I 1 x
- O 3
.- U
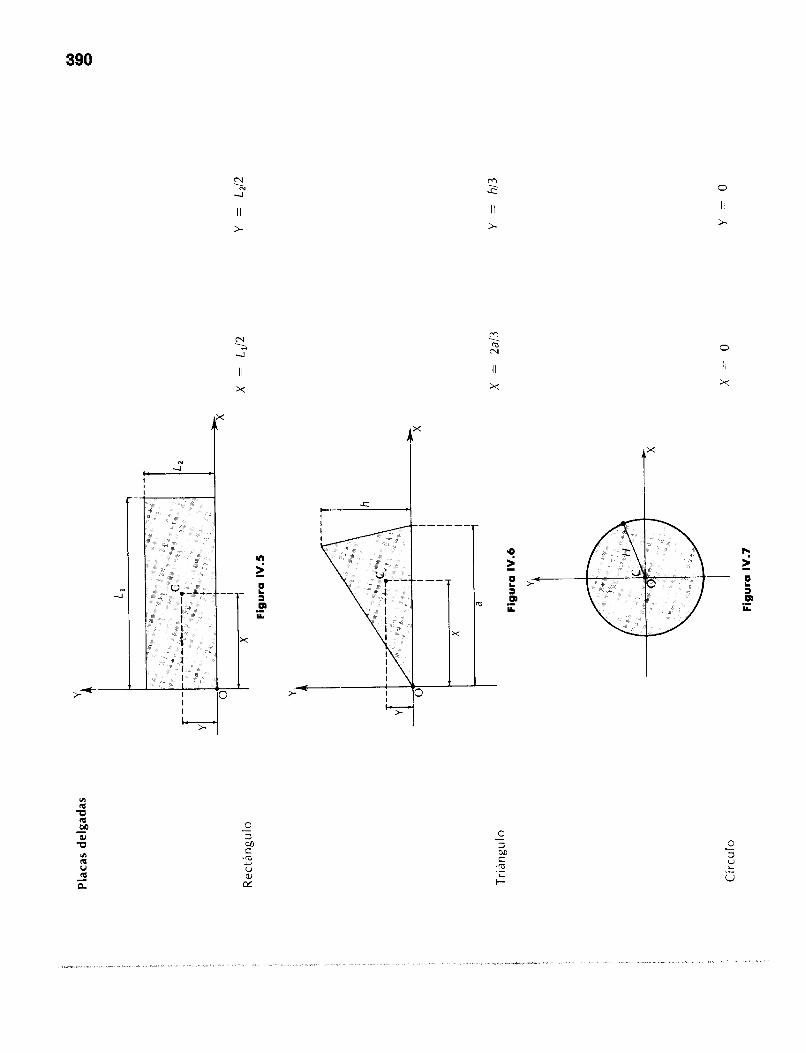
390
>-
. N
hl
4
I1 z
. r(
N
4
1 1 x
f """
I f
v) m U
L m -
- O 3 M
.m K Y
S
I t 1
. m
hl m
I I Z
O
I 1 1
O
I / Y
I- L
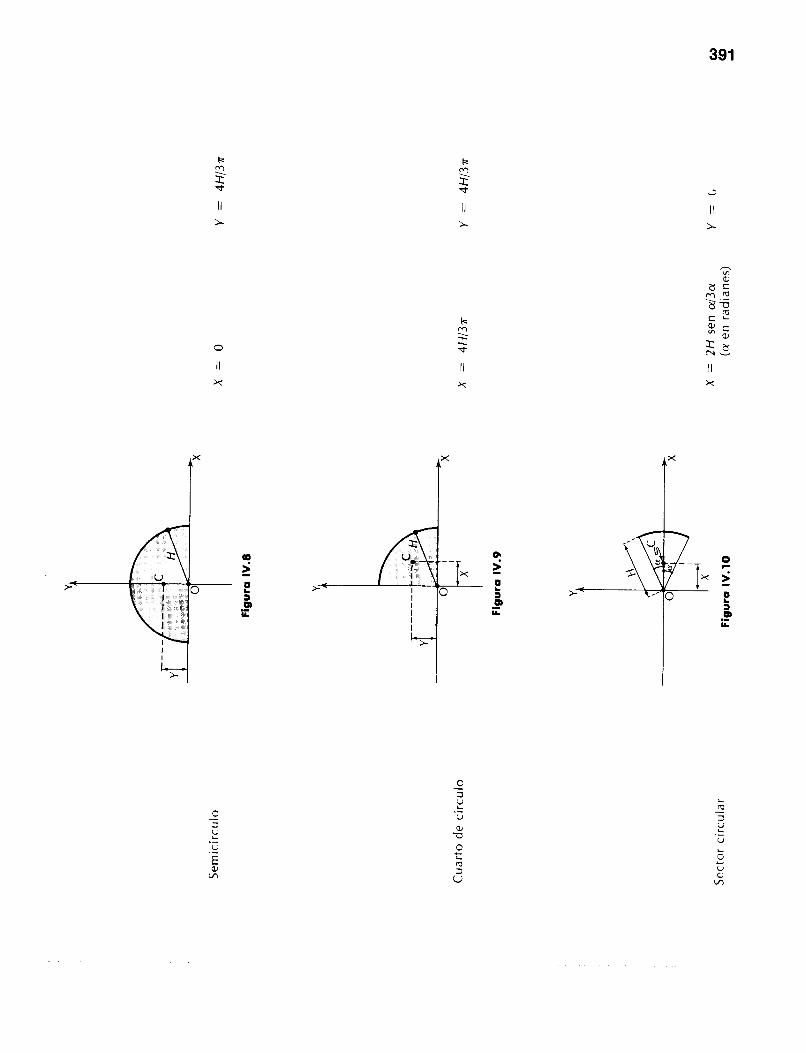
391
W k . 5
I I L
O
I I Z
W k . 5
I 1 Z
f
"i I
3
I I z
> + -' o
L
-cI O U
LA a,
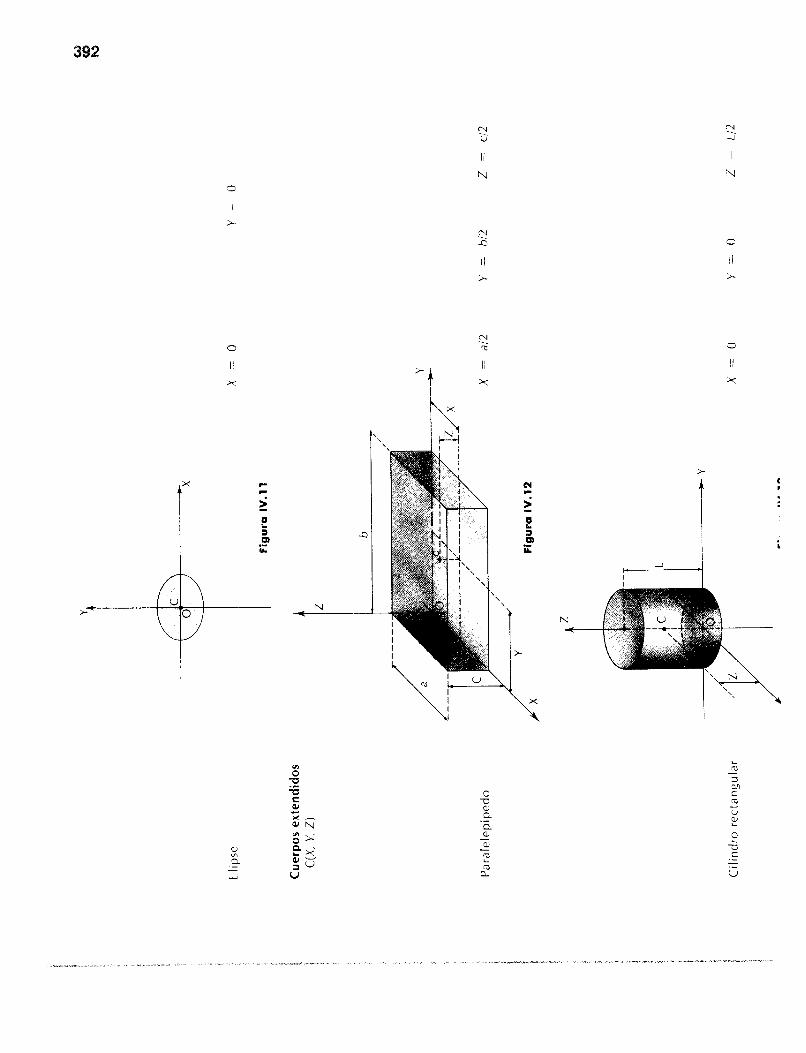
... N c,
/ I N
O I I
x
X c c
?i e a .I P u-
N
-0 ._
/ I 1-
-. N
rg
I I x
I
\r I
\
1_
t
t I
C
/ I >
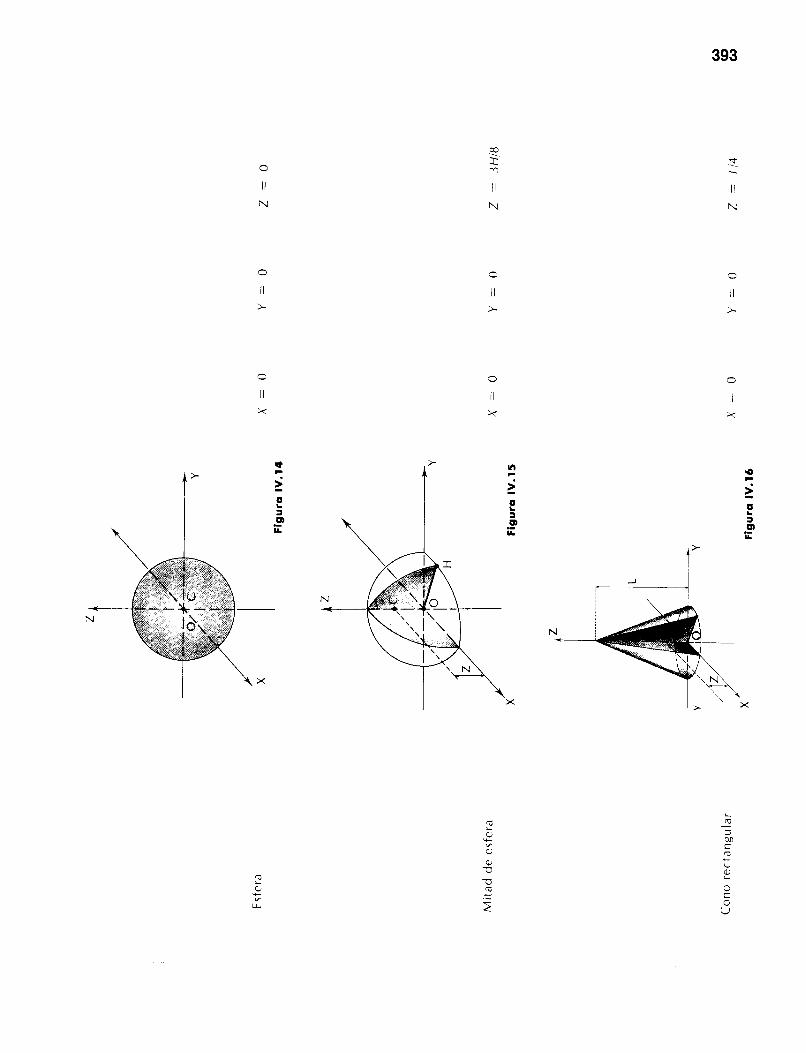
393
" 4:
t m O
I / N
O
/ I r
O
I I Y
O
/ I r
O
/ I Y
t
X
m c
2
F 'c VI
aJ
a,
O
/ I r
O
I1 Y
.- Y m
U a,
c 30
u 5
u a,
U 5 u .- 2
L
O c O o
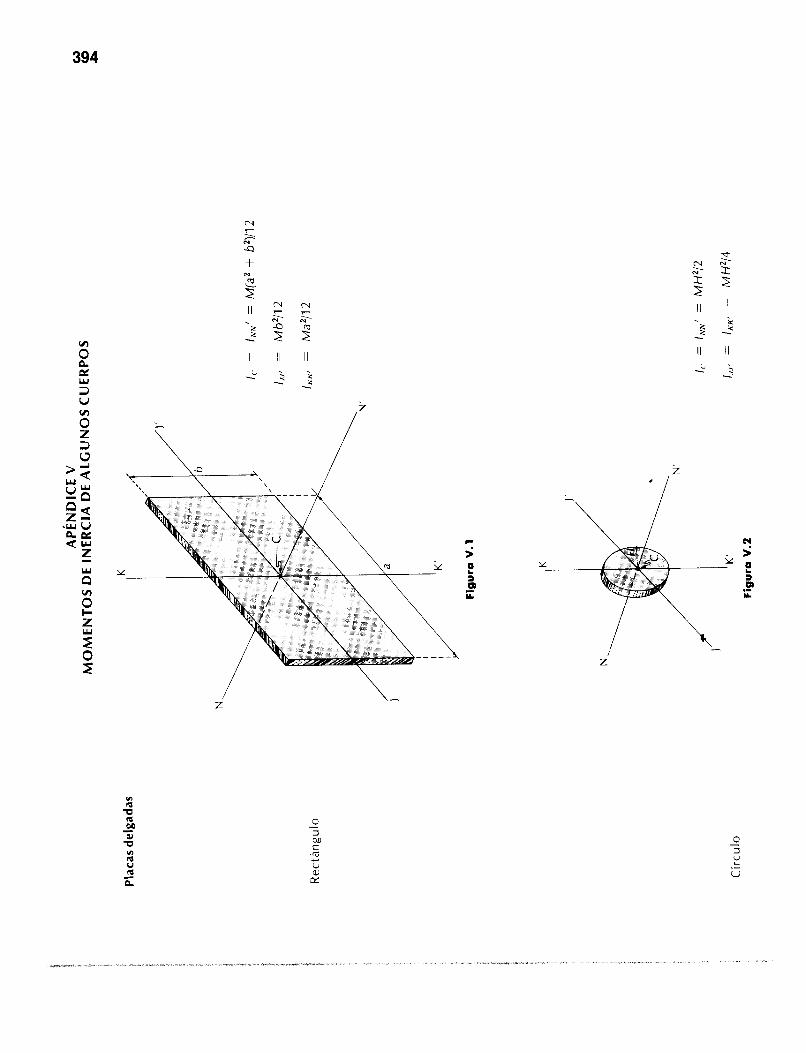
394
N Y- . N
+
Y
n
Z
Z \-
. /z
"\ Y I \
I-
O
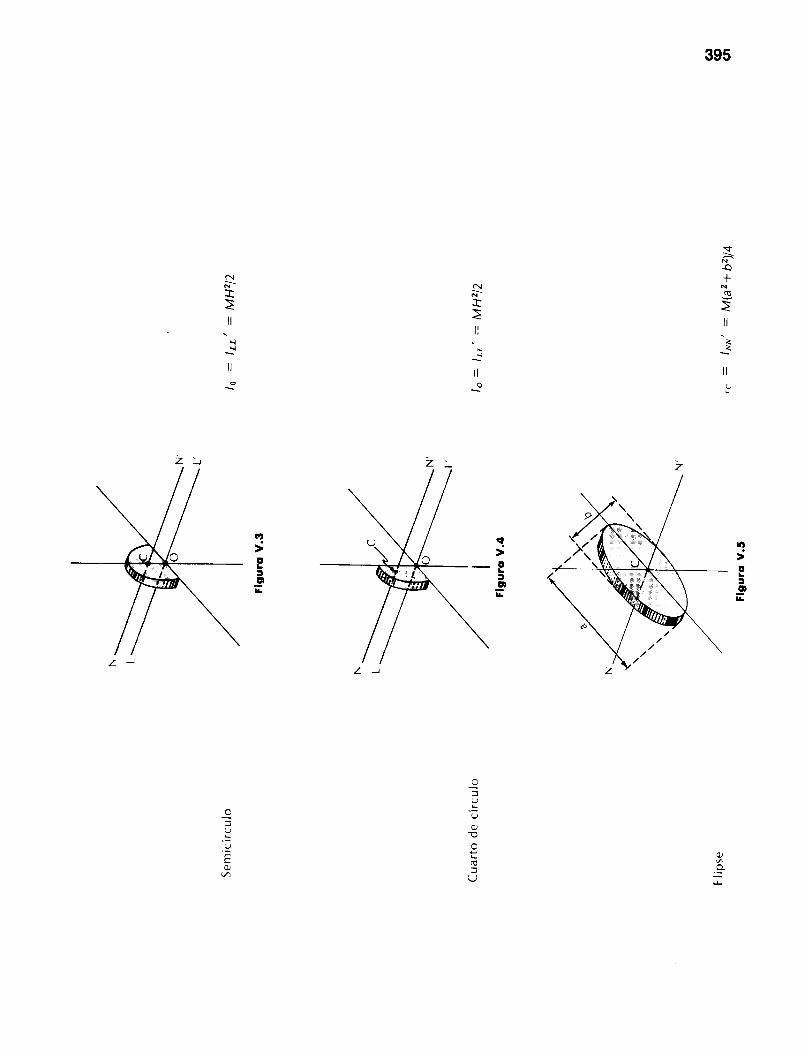
395
I!
+ N m
S I 1
Y >
73 a,
O
m 3
Y L
O
L
w
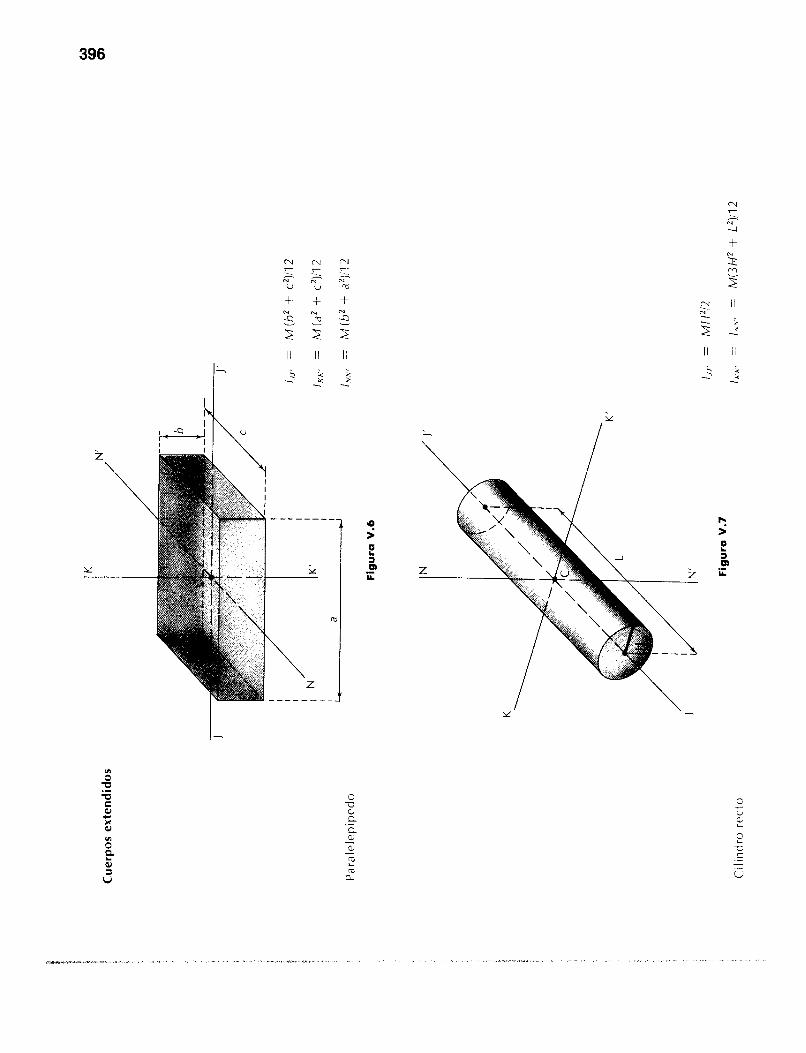
396
z \
Y
E -a C
r; Et. aJ
V 5
7 9
!! > a P .- Y
I-
h. > O a P .- Y
c C
G,
O
U
i
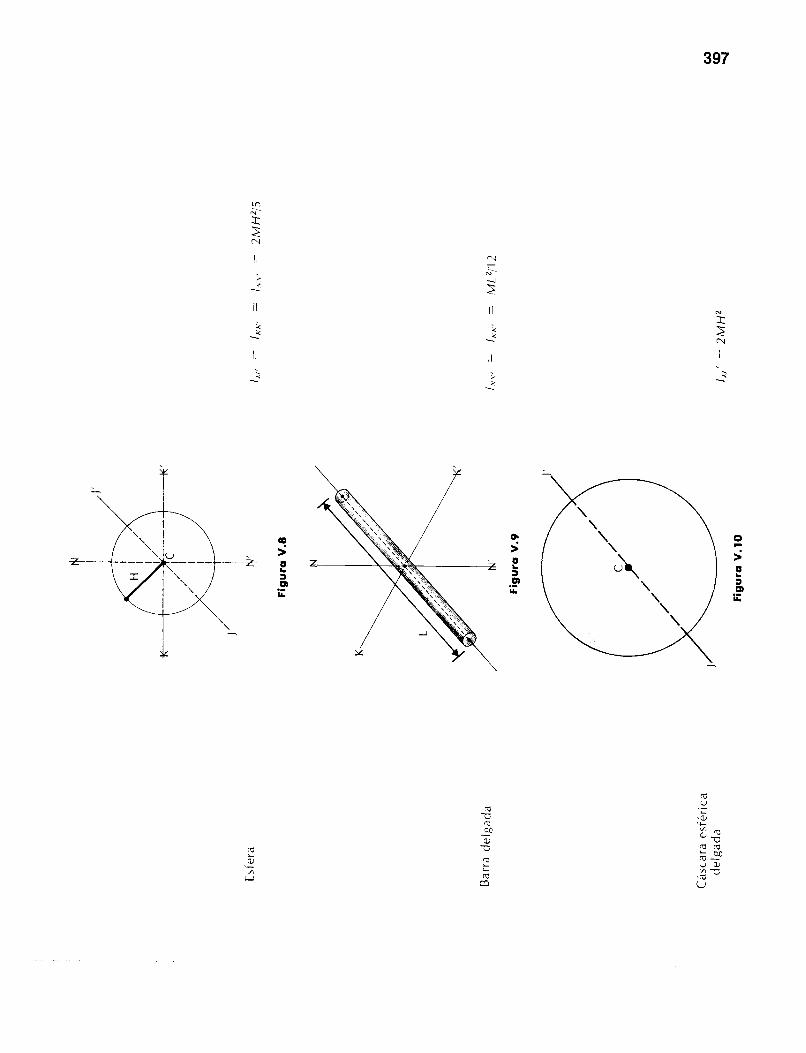
397
00 >
Y
*
? >
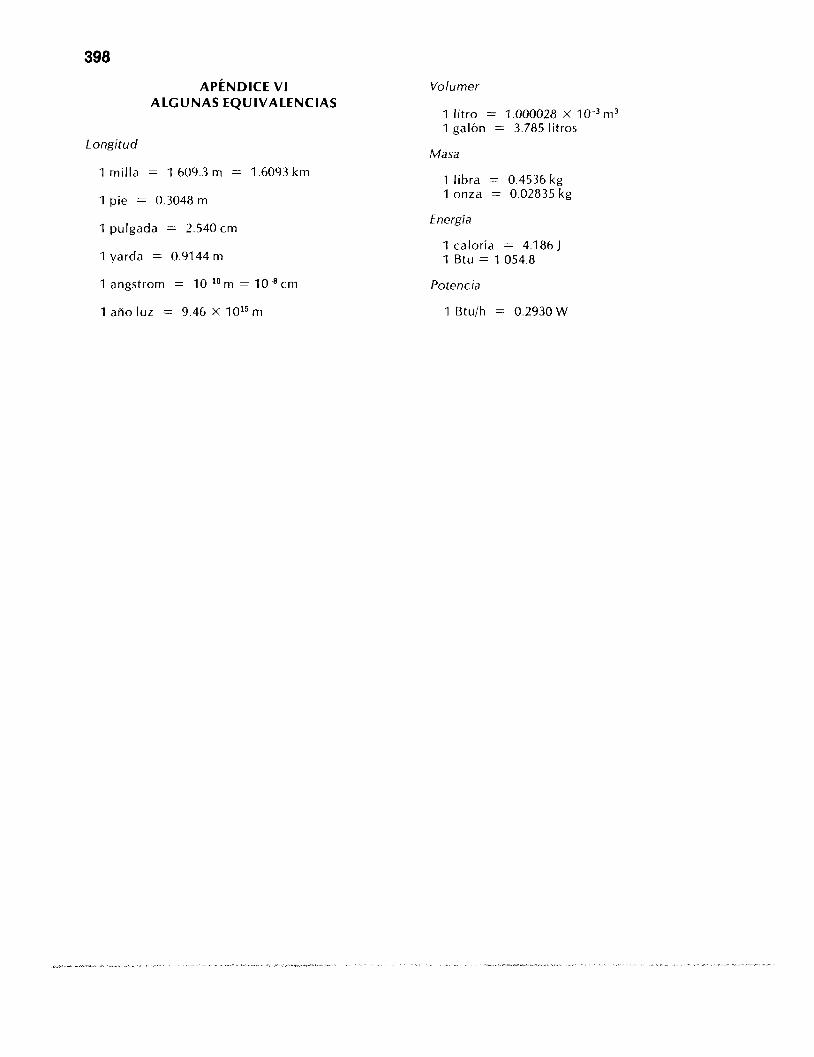
398 APÉNDICE VI
ALGUNAS EQUIVALENCIAS
Longitud
1 mi l la = 1 609.3 m = 1.6093 k m
1 pie = 0.3048 m
1 pulgada = 2.540 cm
1 yarda = 0.9144 m
I angstrom = IO"O m = IO-* cm
1 año luz = 9.46 X m
Volumer
1 l i tro = 1.000028 X m3 1 galón = 3.785 litros
Masa
1 l ibra = 0.4536 kg 1 onza = 0.02835 kg
Energía
1 caloría = 4.186 J 1 Btu = 1 054.8
Potencia
1 Btulh = 0.2930 W
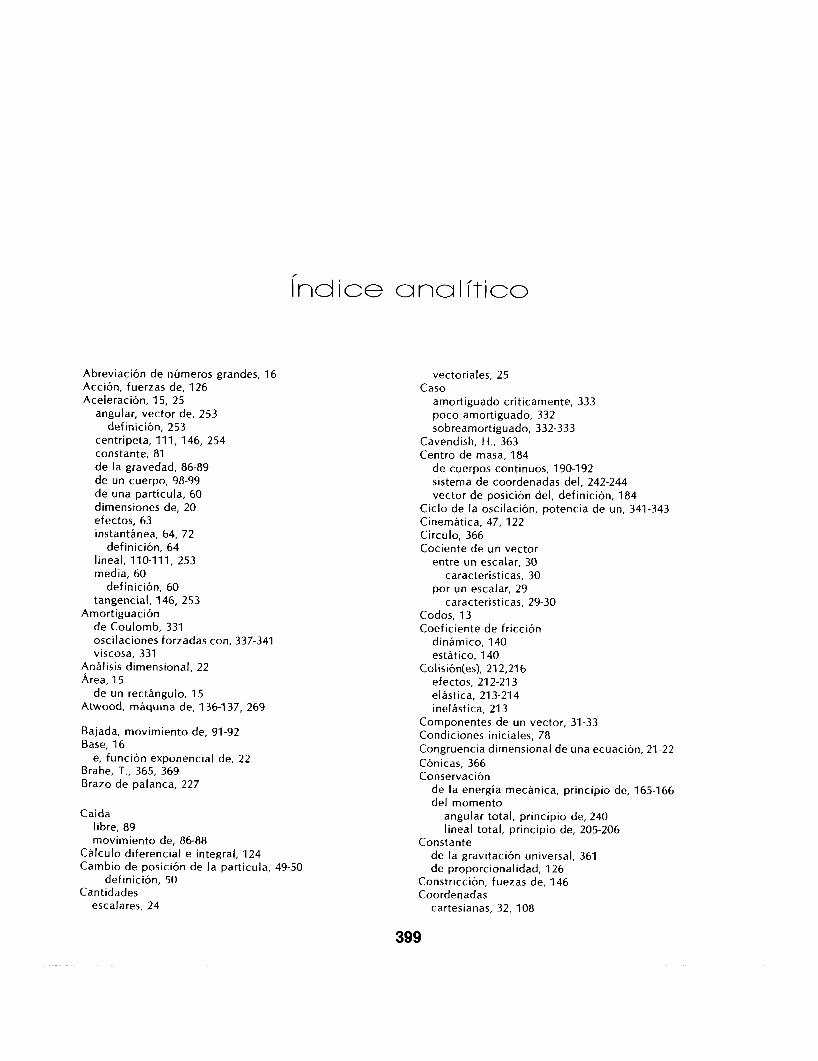
hdice analitico
Abreviación de números grandes, 16 Acción, fuerzas de, 126 Aceleración, 15, 25
definición, 253 angular, vector de, 253
centrípeta, 111, 146, 254 constante, 81 de la gravedad, 86-89 de un cuerpo, 98-99 de una partícula, 60 dimensiones de, 20 efectos, 63 instantánea, 64, 72
definición, 64 lineal, 110-111, 253 media, 60
definición, 60 tangencia!, 146, 253
de Coulomb, 331 oscilaciones forzadas con, 337-341 viscosa, 331
Amortiguación
Análisis dimensional, 22 Area, 1 5
de un rectángulo, 15 Atwood, máquina de, 136-1 37, 269
Bajada, movimiento de, 91-92 Base, 16
Brahe, T., 365, 369 Brazo de palanca, 227
e, función exponencial de, 22
Caída libre, 89 movimiento de, 86-88
Cálculo diferencial e integral, 124 Cambio de posición de la partícula, 49-50
Cantidades definición, 50
escalares, 24
vectoriales, 25
amortiguado críticamente, 333 poco amortiguado, 332 sobreamortiguado, 332-333
Caso
Cavendish, H., 363 Centro de masa, 184
de cuerpos continuos, 190-192 sistema de coordenadas del, 242-244 vector de posición del, definición, 184
Ciclo de la oscilación, potencia de un, 341-343 Cinemática, 47, 122 Círculo, 366 Cociente de un vector
entre un escalar, 30 características, 30
por un escalar, 29 caracteristicas, 29-30
Codos, 13 Coeficiente de fricción
dinámico, 140 estático, 140
Colisión(es), 212,216 efectos, 21 2-21 3 elástica, 213-214 inelástica, 21 3
Componentes de un vector, 31-33 Condiciones iniciales, 78 Congruencia dimensional de una ecuación, 21-22 Cónicas, 366 Conservación
de la energía mecánica, principio de, 165-166 del momento
angular total, principio de, 240 lineal total, principio de, 205-206
Constante de la gravitación universal, 361 de proporcionalidad, 126
Constricción, fuezas de, 146 Coordenadas
cartesianas, 32, 108
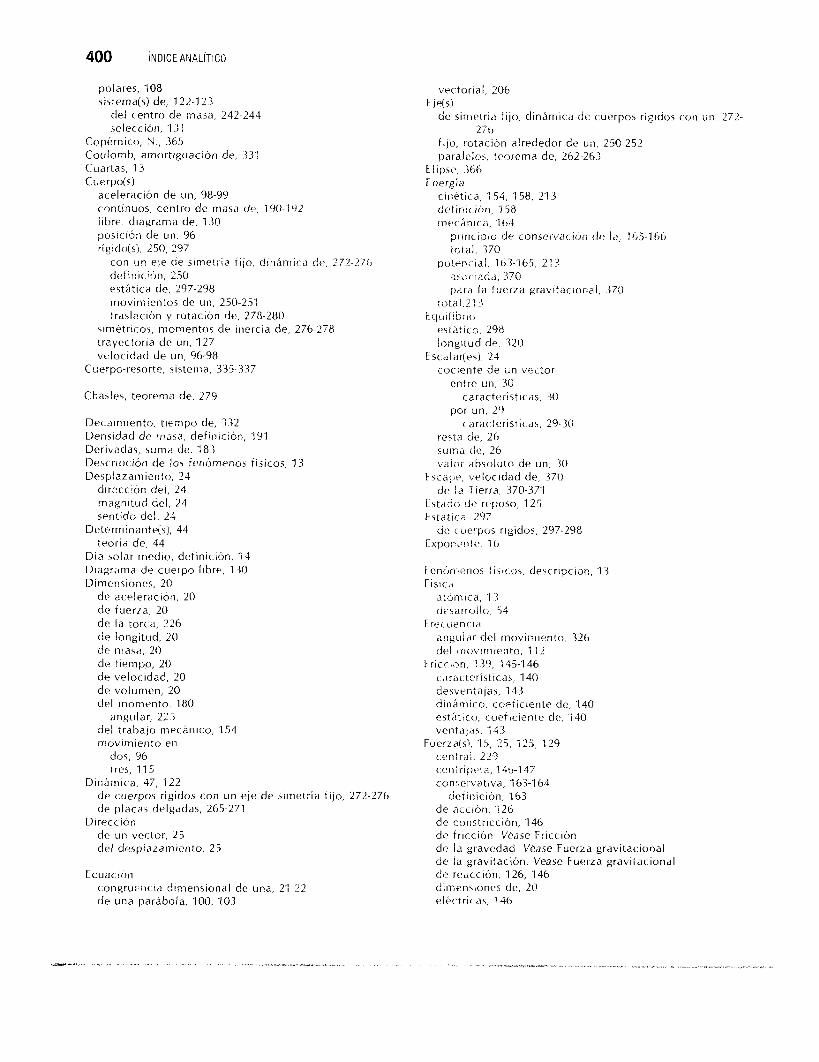
400 iNDlCE ANALíTICO
polares, 108 sistemais) de, 122-1 23
tiel centro de masa, 242-244 seletción, 131
Copérnico, N., 365 Coulomb, amortiguacibn de, 3 3 ; Cuartas, 13 Cuerpo(sj
aceleracion de un, 98-99 continuos, centro de niasa de, 190~192 libre, diagrama de, 130 posicicin de un. 96 rípido(s). 250, 3 7
con un e]e de simeti-id fijo, dinámicd de, 272-270 definIc:on, 2.50 estática de, 197-298 n~ovimientos de un, 250-251 traslacion y rotación de. 278-280
srmPtrico5, monlentos d e inercia de, 276-278 trayectoria de un, 127 velocidad de un, 96-98
Cuerpo-resorte, \istenla, 335-377
Chasles. teorema de. 279
Decalmlento, tiempo de, 332 Lknsidad de masa, deiin~crón, 191 Derivadas, suma de, 183 Desc r ip ión de los fenlimeno3 iísicos, 13 Desplazamiento. 24
dlrc-cclórr del, 24 magnitud del, 24 sentido de!. 24
DeterminantcA(sj. 44 teoría de, 44
Día solar rnedio, definicihn; 14 Lllagr'trna de cuelpo libre, 130 Dimensiones, 20
de dceleracion, 20 de fuerza, 20 de la torca, 226 de> longitud, 20 de ITlasa. 20 de tiempo, 20 dt. \delocidad, 20 de volumen, 20 del momento, 180
angular, 225 del trabajo mecárllco, 154 movimiento t'n
d o r , 96 tres, 115
Dlnárnica, 47, 122 d e cuerpos rigidos con un eje de simetría fijo, 272-276 de placas delgadas, 265-271
de un vector, 25 del dejpiaLarnlento, 25
Dirección
EcuaciiJn congruerrcid dimensional de una, 21-22 de una pardbola, 100, 103
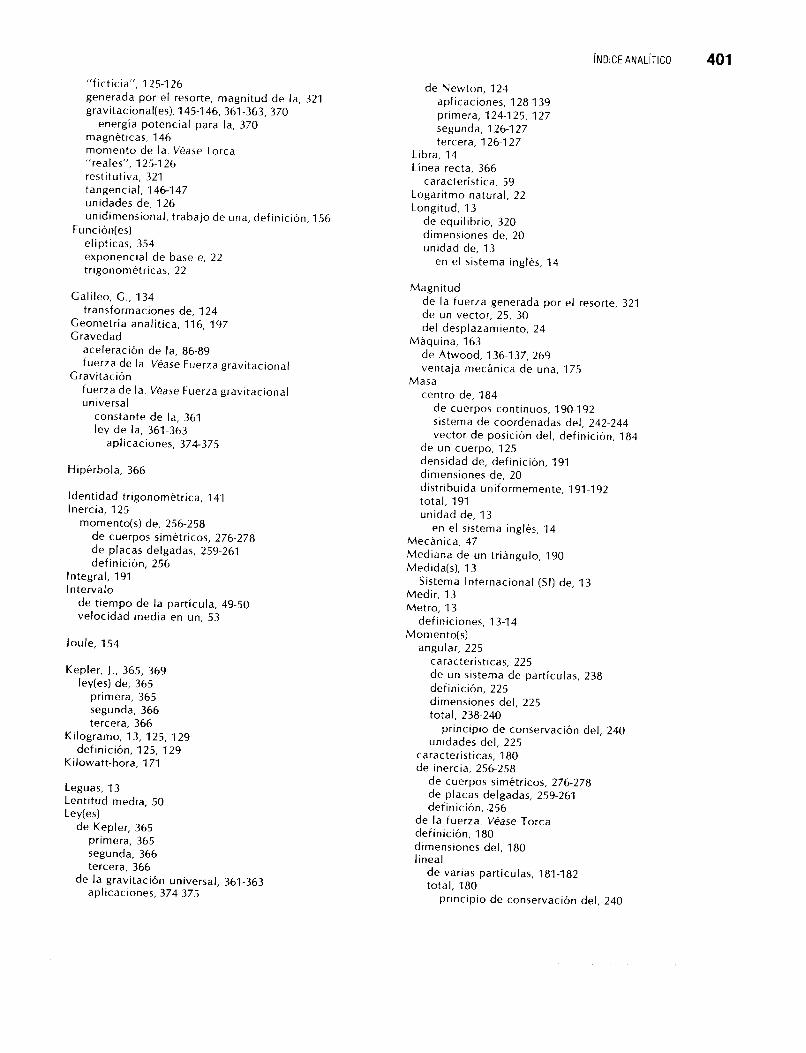
¡NDlCE ANALíTICO 401 "ficticia", 125-126 generada por el resorte, magnitud de la, 321 gravitacional(es), 145-1 46, 361-363, 370
magnéticas, 146 momento de la. Véase Torca "reales", 125-1 26 restitutiva, 321 tangencial. 146-147 unidades de, 126 unidimensional, trabajo de una, definición, 156
elípticas, 354 exponencial de base e, 22 trigonométricas. 22
energía potencial para la, 370
Función(es)
Calileo, C., 134 transformaciones de, 124
Geometría analítica, 116, 197 Gravedad
aceleración de la, 86-89 fuerza de la. Véase Fuerza gravitacional
Gravitación fuerza de la. Véase Fuerza gravitacional universal
constante de la, 361 ley de la, 361-363
aplicaciones, 374-375
Hipérbola, 366
Identidad trigonométrica, 141 Inercia, 125
momento(s) de, 256-258 de cuerpos simétricos, 276-278 de placas delgadas, 259-261 definición, 256
Integral, 191 Intervalo
de tiempo de la partícula, 49-50 velocidad media en un, 53
joule, 154
Kepler, J., 365, 369 ley(es) de, 365
primera, 365 segunda, 366 tercera, 366
Kilogramo, 13, 125, 129 definición, 125, 129
Kilowatt-hora, 171
Leguas, 13 Lentitud media, 50 Ley(es)
de Kepler, 365 primera, 365 segunda, 366 tercera, 366
aplicaciones, 374-375 de la gravitación universal, 361-363
de Newton, 124 aplicaciones, 128-1 39 primera, 124-1 25, 127 segunda, 126-1 27 tercera, 126-1 27
Libra, 14 Línea recta, 366
característica, 59 Logaritmo natural, 22 Longitud, 13
de equilibrio, 320 dimensiones de, 20 unidad de, 13
en el sistema inglés, 14
Magnitud de la fuerza generada por el resorte, 321 de un vector, 25, 30 del desplazamiento, 24
de Atwood, 136-1 37,269 ventaja mecánica de una, 175
centro de, 184
Máquina, 163
Masa
de cuerpos continuos, 190-192 sistema de coordenadas del, 242-244 vector de posición del, definición, 184
de un cuerpo, 125 densidad de, definición, 191 dimensiones de, 20 distribuida uniformemente, 191-192 total, 191 unidad de, 13
en el sistema inglés, 14 Mecánica, 47 Mediana de un triángulo, 190 Medida(s), 13
Medir, 13 Metro, 13
Momento[s)
Sistema Internacional (SI) de, 13
definiciones, 13-14
angular, 225 características, 225 de un sistema de partículas, 238 definición, 225 dimensiones del, 225 total, 238-240
unidades del, 225 características, 180 de inercia, 256-258
principio de conservación del, 240
de cuerpos simétricos, 276-278 de placas delgadas, 259-261 definición, ,256
de la fuerza. Véase Torca definición, 180 dimensiones del, 180 lineal
de varias partículas, 181-182 total, 180
principio de conservación del, 240
402 íNDlCE ANALíTICO
unidades del, 181
causas, 124 circular, 108-109,146
caracteristica, 11 2 general, 11 O no Uniforme, 114, 146 uniforme, 110. 146
Movimlento(sj, 47
velocidad l ineal en el. 110 de bajada, 91-92 de caída, 86-88 de la partícula, 47-48 de los planetas, 36.5 de placas delg,adas con un punto f i jo, 254-256 de subida. 90-91 de un cuerpo rigido, 250-251 de v lbración de un resorte, 320-327
aspectos energéticos, 328-331 en dos dimensiones, 95 en tres dimensiones, 115 en un plano. Véase Movimiento en dos dimensiones frecuencia del, 1.12
angular, 326 general, 251 horizontal, 96, 99 periódico, 320 planar, 251 relativo, 122-124 uniforme, 60, 72-73
unlformemente acelerado, 81
vertical, 96,99
velocidad Instantánea en el, 60
caracteristlcas. 81, 85
Negativo de un vector, 28
Newton, definición, 126 Newton, I , 11 3, 124-1 26, 361, 363, 365-366, 371, 374-375
definicibn, 28
ley(es) de, 124 aplicaciones, '128-139 primera, 124-125, 127 segunda, 126-1 27 tercera, 126-1 27
Notación exponencial, 16 Número(s). 1 3
grandes abreviación, 16 desventajas, 16
Observador inercial, 125 Oscilaclón(esj, 320. Véase también Vibración
amortlguadas, 331-333 forzadas, 333-337
con amortiguación, 337-341 potencla de un c ic lo de, 341-343
Oscilador armbnico, 328
Palanca, brazo de, 227 Parábola, 366
ecuación de una, 100, 103 Paralelogramo. regla del, 27 Particula(s)
aceleración de una, 60 cambio de posición de la, 49-50
Intervalo de tiempo de la, 49-50 momento
angular de un sistema de, 238 lineal
defintción, 50
d c a und. Vease ,Mornetjto cie varias, 181-182
rnovimiento de la, 47-48 poslclón de una, 47 rapidez de una, 50 trayectorla de la, 48 velocidad de una, 50-51
Péridulo bdIiStICo. 217-218 de torsión, 355 simpie, 354-35s
Periodo, 11 2 Peso, 13, 129 Pithgora,. ?eorema de, 34-3.5, 265 Placa(s)
cuadrada, 355-356 delgadas
con un punto fijo. rnovirnienio de, 254-256 dinámica de, 265-271 momentos de inercia de. 2.59-261
Planetas, movimiento de 105, 365 Plano(s)
inclinados, 134 movrn-liento en un Véase Mo\:ilniento en dos dimensiones
de un cuerpo. 96 de una partícula, 47
Posición
cambio de. 49-50 definición, 50
& I centro de masa. vector de, deilulcibn, 184
constante. 172 de un C I C I O dr i d oscilación, 341-343
de Kepler, 35.5 de Newton, 124-12.5, 127
tie conservación de la energía mecánica, 165-166 del momento
Potencia, 170
Primera ley
Prirlciplo
angular total, 240 lineal total, 205-206
de superposición de efectos, 96,116
escalar de dos vectores, 38-40 vectorla1 de dos vectores, 38, 40-41. 225
Producto
Propiedades físicas, 135, 187 Proporcionalidad, constante de, 126
Rapidez de una partícula. 50 Reacción, fuerzas de, 126. 145 Rectángulo, área de un, 15 Referencia inercial, sistema de, 124
definición, 124
íNDlCE ANALiTlCO 403 Regla
del paralelogramo, 27 del triángulo, 27
Reposo, estado de, 125 Resonancia, 335, 337, 353 Resorte
magnitud de la fuerza generada por el, 321 movimlento de vibración de un, 320-327
rigidez del, 321 aspectos energéticos, 328-331
Resta de escalares, 26 Resultante, 27 Rigidez del resorte, 321 Rotación, 251
alrededor de un eje fijo, 250-252 y traslación, 251
de cuerpos rígidos, 278-280
Segunda ley de Kepler, 366 de Newton, 126-127
definictones, 14 Segundo, 13-14
Selección de sistemas de coordenadas, 131 Sentido
de un vector, 25 del desplazamiento, 24
cuerpo-resorte, 335, 337 de coordenadas, 122-1 23
Sistema(s)
del centro de masa, 242-244 selección, 131
de partículas, momento angular de un, 238 de referencia inercial, 124
de unidades, 14 definición, 124
inglés, 14 unidades básicas del, 14
Internacional (SI) de medidas, 1 3 mecánico que puede oscilar, 337 que vibran, 353-356 0,122
Subida, movimiento de, 90-91 Suma
de derivadas, 183 de escalares, 26 de vectores, 26-28
Superposición de efectos, principio de, 96, 116
Tensión, 132 Teorema
de Chasles, 279 de ejes paralelos, 262-263 de Pitágoras, 34-35, 265 trabajo-energía cinética, 158
Teoría de determinantes, 44 Tercera ley
de Kepler, 366 de Newton, 126-127
de decaimiento, 332 dimensiones de, 20
Tiempo, 13
unidad de, 13 en el sistema inglés, 1 4
Tierra, velocidad de escape de la, 370-371 Torca
definición, 226 dimensiones de la, 226 externa total, 239 unidades de la, 226
Torsión, péndulo de, 355 Trabajo
de una fuerza unidimensional, definición, 156 mecánico, 154
definición, 154 dimensiones del, 154 unidades del, 154
Trabajo-energía cinétlca, teorema, 158 Transformaciones de Calileo, 124 Traslación, 250
y rotación, 251 de cuerpos rígidos, 278-280
Trayectoria cerrada, 162 de la partícula, 48 de un cuerpo, 127
mediana de un, 190 regla del, 27
Triángulo
Unldad(es), 13 básicas, 13
de fuerza, 126 de la torca, 226 de longitud, 13
de mas%, 1 3
de medida, 13 de tiempo, 13
en el sistema inglés, 14 del momento, 181
angular, 225 del trabajo mecánico, 154 derivadas, 15
sistema(s) de, 1 4
del slstema de unidades inglés, 14
en el sistema inglés, 14
en el sistema inglés, 14
característica, 15
inglés, 14
Valor absoluto de un escalar, 30 Varas, 13 Vector(es), 25
antiparalelos, 28 cociente de un
entre un escalar, 30 características, 30
por un escalar, 29 características, 29-30
componentes, 31-33 de posición del centro de masa, definición, 184 de velocidad
angular, 252 características. 252
404 iNDlCE ANALíTICO
definición, 252
Características, 252-253 definición, 252
lineal, 252
dirección de un, 25 distintos, 26 iguales, 25, 38 magnitud de un, 25, 30 negativo de un, 28
definición, 28 paralelos, 28 perpendiculares, 39 producto
escalar de dos, 38-40 vectorial de dos, 38, 40-41
sentido de un, 25 suma de, 26-28 tridimensionales, 40 unitarios, 33
Velocidad, 15, 25 angular
instantánea, definición, 108 media, definición, 108 vector de, 252
características, 252 definición, 252
de un cuerpo, 96-98 de una partícula, 50 dimensiones de, 20 escape de, 370
instantánea, 55-57, 72 de la Tierra, 370-371
definición, 55 en el movimiento uniforme, 60
en el movimiento circular uniforme, 110 vector de, 252
lineal, 109
características, 252-253 definición, 252
en un intervalo, 53 inconvenientes, 54
media, 50-51
Ventaja mecánica de una máquina, 175 Vibración, 320. Véase también Oscilación
de un resorte, movimiento de, 320-327 aspectos energéticos, 328-331
Volumen, 15 dimensiones de, 20
Watt, 170
Yarda, 14