Embed Size (px)
Citation preview

MECANISMOS DE TRANSMISION LEVAS METODO GRAFICO

INTRODUCCION
En ingeniería mecánica, una leva es un elemento mecánico hecho de algún material (madera, metal, plástico, etc.) que va sujeto a un eje y tiene un contorno con forma especial, comúnmente ovoide en su mayoría. De este modo, el giro del eje hace que el perfil o contorno de la leva toque, mueva, empuje o conecte una pieza conocida como seguidor. Existen dos tipos de seguidores, según su movimiento : traslación y de rotación. En todos los sistemas de levas el diseñador debe asegurarse de que la leva y el seguidor siempre estén en contacto esto se logra de tres formas; por gravedad, por medio de un resorte o por medio de una restricción mecánica.

CLASIFICACION DE LAS LEVAS
Las levas se clasifican según sus formas básicas o según su contorno ; en la siguiente figura se ilustran cuatro tipos diferentes: • Leva de placa, también llamada de disco o radial.
• Leva de cuña.
• Leva cilíndrica o de tambor.
• Leva lateral o de cara.


CONTACTO POR FUERZA

CONTACTO POR FORMA

CONTACTO POR GRAVEDAD

También se pueden clasificar según la forma básica del seguidor; en la siguiente figura se ilustran los cuatro tipos conocidos: • Seguidor de cuña.
• Seguidor de cara plana.
• Seguidor de rodillo.
• Seguidor de cara esférica o zapata curva.

Otra clasificación es según el movimiento de salida: • Movimiento alternativo (traslación).
• Movimiento oscilatorio (rotación).

DIAGRAMAS DE DESPLAZAMIENTO
Por lo común un sistemas de leva es un dispositivo con un solo grado de libertad y el cual necesita un solo movimiento de entrada conocido θ(t) y entrega uno de salida Y ; por lo regular este movimiento lo efectúa un motor el cual entrega una velocidad constante al eje donde esta montada la leva.
Y = una distancia en un seguidor alternativo
Y = un ángulo en un seguidor oscilatorio

Para la subida y el retorno se escoge el movimiento mas indicado de los cuales pueden ser: • Movimiento rectilíneo uniforme ( no sirve para subida completa debido a sus
vértices, el cual posee una pendiente de magnitud constante y se utiliza entre secciones curvas porque se eliminan los vértices generados por la línea recta).
• Movimiento rectilíneo uniforme acelerado • Movimiento parabólico • Movimiento armónico simple • Movimiento cicloidal

M.R.U
M.PARABOLICO
La combinación de estos movimientos es un movimiento rectilíneo modificado
Como graficar un movimiento parabólico.
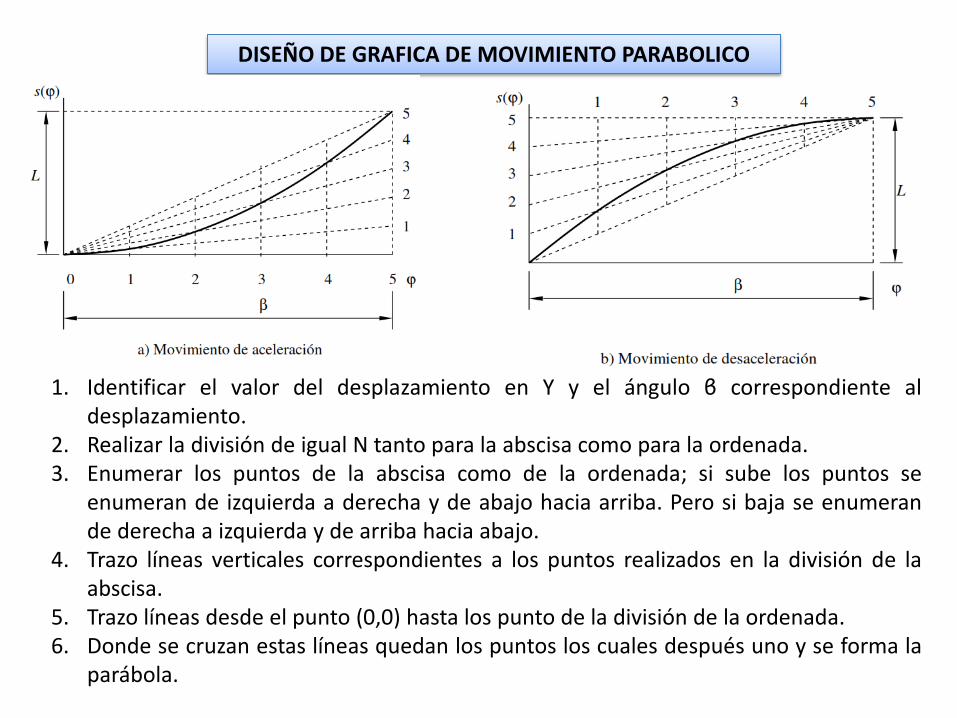
1. Identificar el valor del desplazamiento en Y y el ángulo ϐ correspondiente al desplazamiento.
2. Realizar la división de igual N tanto para la abscisa como para la ordenada. 3. Enumerar los puntos de la abscisa como de la ordenada; si sube los puntos se
enumeran de izquierda a derecha y de abajo hacia arriba. Pero si baja se enumeran de derecha a izquierda y de arriba hacia abajo.
4. Trazo líneas verticales correspondientes a los puntos realizados en la división de la abscisa.
5. Trazo líneas desde el punto (0,0) hasta los punto de la división de la ordenada. 6. Donde se cruzan estas líneas quedan los puntos los cuales después uno y se forma la
parábola.
DISEÑO DE GRAFICA DE MOVIMIENTO PARABOLICO

Creación de M. Armónico Simple
MOVIMIENTO ARMONICO SIMPLE
1. Identificar el valor del desplazamiento en Y y el ángulo ϐ correspondiente al desplazamiento.
2. Realizar un circulo de diámetro igual al desplazamiento Y. 3. Dividir en N partes el semicírculo y el ángulo ϐ correspondiente. 4. Si es de subida enumero de izquierda a derecha las divisiones de la abscisa y el
circulo lo enumero en el sentido de las manecillas del reloj. Pero si es de bajada hago todo lo contrario.
5. Trazo líneas verticales que coinciden con las divisiones de la abscisa y líneas horizontales que coinciden con las divisiones del semicírculo.
6. Uno todos los puntos generados y se forma el movimiento.

Creación de M. Cicloidal
MOVIMIENTO CICLOIDAL

1. Identificar el valor del desplazamiento en Y y el ángulo ϐ correspondiente al desplazamiento.
2. Se realiza un circulo donde termina el movimiento de radio igual a L/2∏.
3. Se divide igualmente en N veces el ángulo ϐ y el circulo creado.
4. Se traza desde el punto (0,0) o 0 una línea hasta la esquina donde termina el desplazamiento.
5. Se proyectan líneas paralelas a la anterior desde los punto medios de las líneas horizontales generadas en el circulo de radio L/2∏ hasta la ordenada.
6. Luego se generan líneas verticales desde las divisiones generadas en la abscisa que chocan con las líneas anteriores.
7. Después uno esos puntos y se genera la geometría cicloide deseada.

DISEÑO GRAFICO DE PERFILES DE LEVAS

NOMENCLATURA DE LEVAS
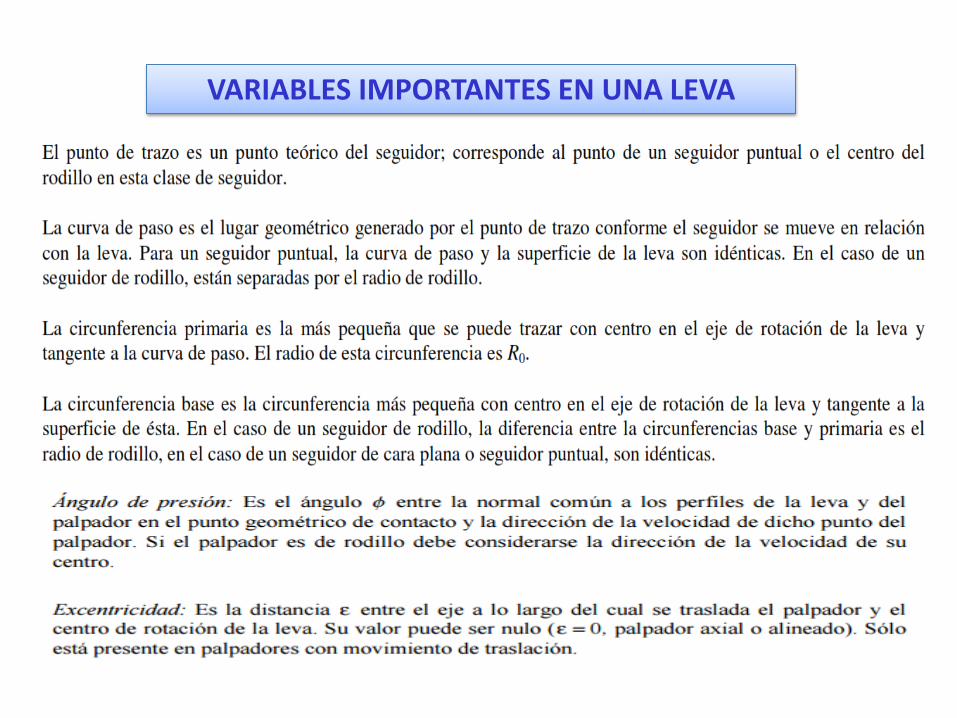
VARIABLES IMPORTANTES EN UNA LEVA

DISEÑO DE LEVA CONCENTRICA DE RODILLO CON MOVIEMIENTO DE TRANSLACION


DISEÑO DE LEVA EXCENTRICA DE RODILLO CON MOVIEMINTO DE TRANSLACION


DISEÑO DE LEVA DISCO CON SEGUIDOR DE CARA PLANA

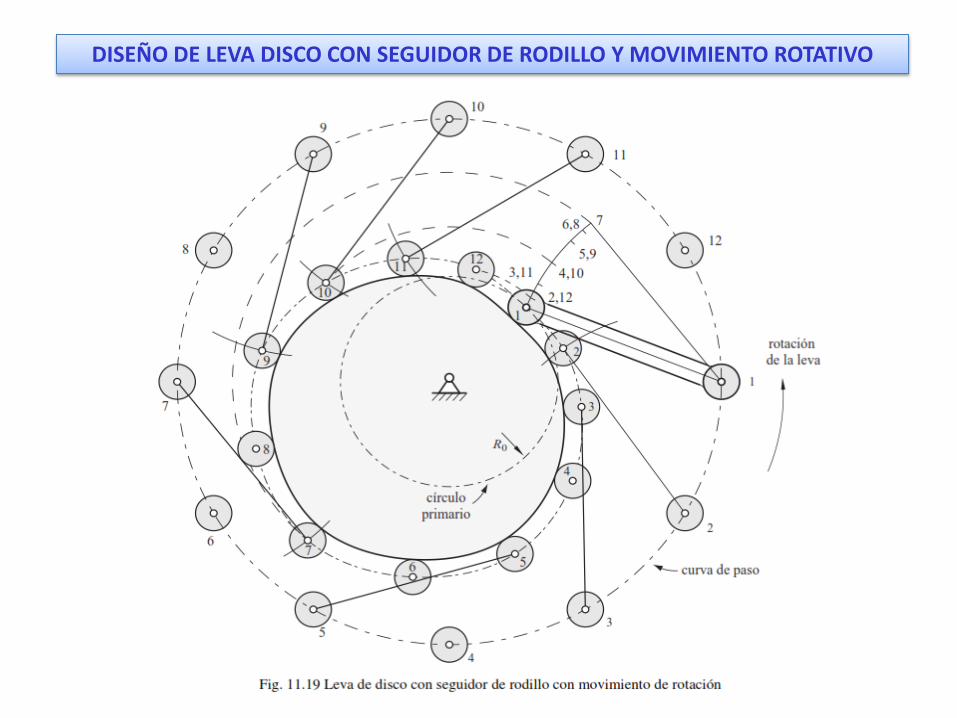
DISEÑO DE LEVA DISCO CON SEGUIDOR DE RODILLO Y MOVIMIENTO ROTATIVO

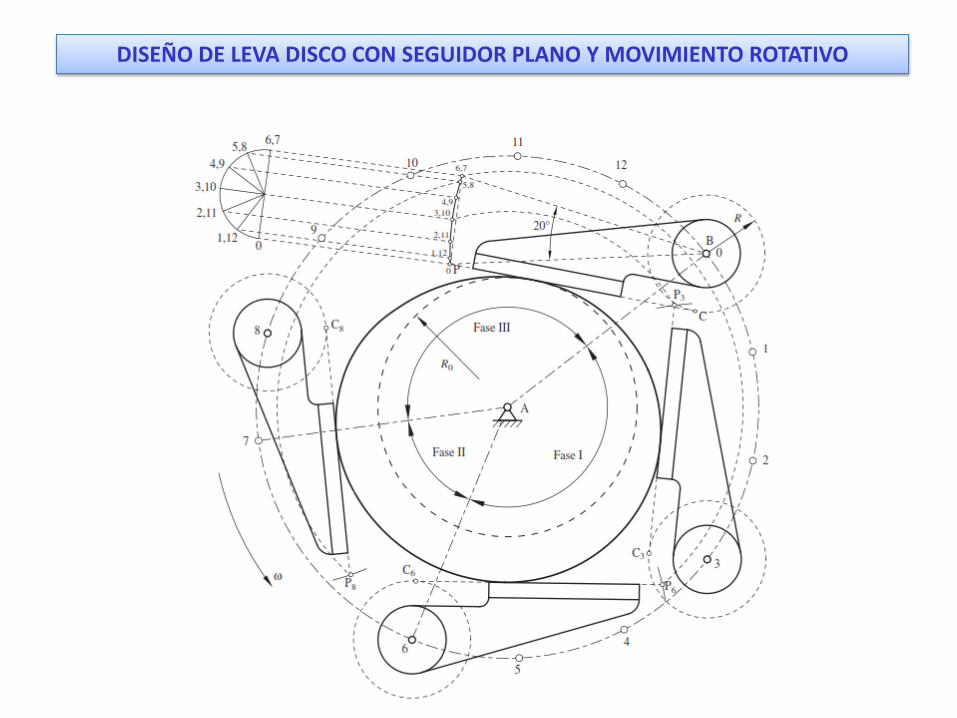
DISEÑO DE LEVA DISCO CON SEGUIDOR PLANO Y MOVIMIENTO ROTATIVO


EJEMPLO DE LEVAS
ANGULO θ MOVIMIENTO DESPLAZAMIENTO
0 - 60 PARABOLICO (a= constante (+) 40 mm
60 - 120 Movimiento Rectilíneo uniforme V=( constante)
20 mm
120 – 180 PARABOLICO (a= constante (-) 40 mm
180 - 240 REPOSO 0
240 - 300 MOVIMIENTO ARMONICO SIMPLE 100 mm
1. Realizar el siguiente diagrama de desplazamientos y sus respectivas curvas?.
2. Realizar el perfil de la siguiente leva de placa y de seguidor de rodillo concéntrico?, teniendo en cuenta el diagrama de desplazamiento anterior.
Radio del circulo primario R0 = 30 mm Radio del rodillo Rr = 10 mm Velocidad angular de 250 rpm y movimiento manecillas del reloj.

3. Realizar el perfil de la siguiente leva de placa excéntrica y de seguidor de rodillo?, teniendo en cuenta el diagrama de desplazamientos anterior.
Radio del circulo primario R0 = 40 mmm Radio del rodillo Rr = 5 mm Excentricidad e=10 mm Velocidad angular de 800 rpm y movimiento manecillas del reloj.
4. Realizar el perfil de la siguiente leva zapata plana?, teniendo en cuenta el diagrama de desplazamientos anterior.
Radio del circulo primario R0 = Rr= 25 mm Velocidad angular de 800 rpm y movimiento manecillas del reloj.

5. Realizar el siguiente diagrama de desplazamientos y sus respectivas curvas?, para una leva de seguidor de rodillo oscilante.
ANGULO θ MOVIMIENTO Angulo ф
0 - 90 MOVIMIENTO ARMONICO SIMPLE 40 grados sube
90 - 180 REPOSO 0
180 – 270 MOVIMIENTO ARMONICO SIMPLE 40 grados baja
270 - 360 REPOSO 0
• w = 800 RPM contrario a la manecillas del reloj • Ro= 40 mm y Rr= 5mm • Ubicación del pivote del seguidor respecto al centro de la leva es de 70 mm a la
derecha y 50 mm por encima. • Longitud del vástago del seguidor L=P0*A0
EJEMPLO DE LEVAS 2

6. Realizar el siguiente diagrama de desplazamientos y sus respectivas curvas?, de la siguiente leva de seguidor de rodillo.
ANGULO θ MOVIMIENTO DESPLAZAMIENTO
0 - 60 PARABOLICO (a= constante) (+) 10 mm
60 - 120 Movimiento Rectilíneo uniforme V=( constante)
10 mm
120 – 180 PARABOLICO (a= constante) (-) 10 mm
180 - 360 MOVIMIENTO ARMONICO SIMPLE 30 mm
7. Realizar el perfil de la siguiente leva de placa y de seguidor de rodillo concéntrico?, teniendo en cuenta el diagrama de desplazamiento anterior.
Radio del circulo primario R0 = 15 mm Radio del rodillo Rr = 8 mm Velocidad angular de 800 rpm y movimiento contrario del reloj.
TALLER N.1
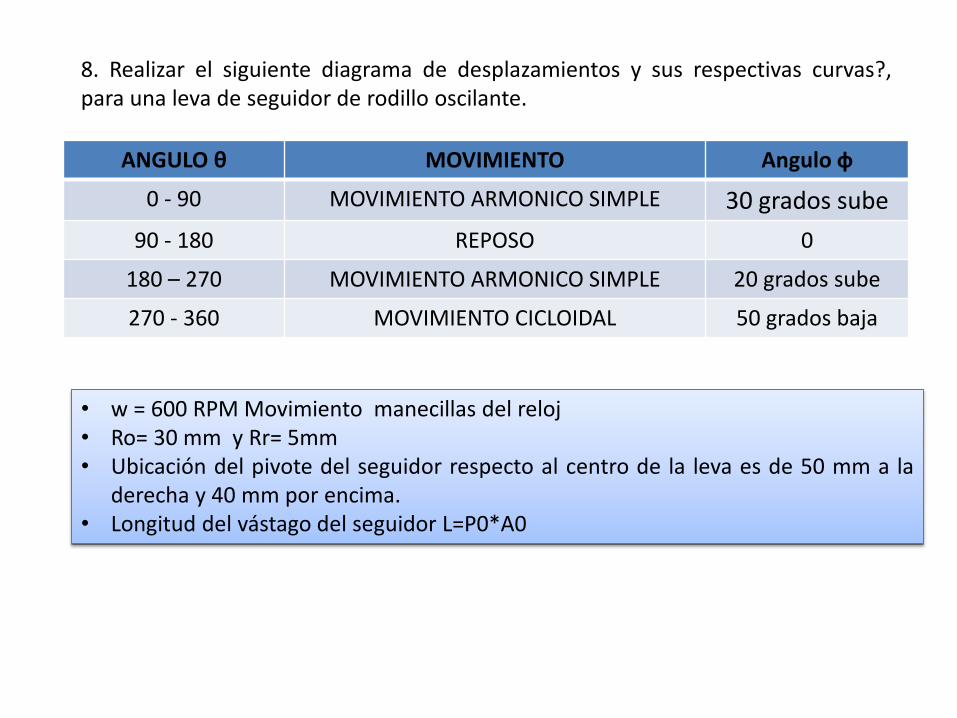
8. Realizar el siguiente diagrama de desplazamientos y sus respectivas curvas?, para una leva de seguidor de rodillo oscilante.
ANGULO θ MOVIMIENTO Angulo ф
0 - 90 MOVIMIENTO ARMONICO SIMPLE 30 grados sube
90 - 180 REPOSO 0
180 – 270 MOVIMIENTO ARMONICO SIMPLE 20 grados sube
270 - 360 MOVIMIENTO CICLOIDAL 50 grados baja
• w = 600 RPM Movimiento manecillas del reloj • Ro= 30 mm y Rr= 5mm • Ubicación del pivote del seguidor respecto al centro de la leva es de 50 mm a la
derecha y 40 mm por encima. • Longitud del vástago del seguidor L=P0*A0
![indexadores [Modo de compatibilidad] · --El eje de levas donde se montan 2 levas planas de perfiles conjugados.--El eje de salida en el que se montan los seguidores de leva transmisores](https://img.pdfslide.net/doc/110x75/5bb224e409d3f206648b90b6/indexadores-modo-de-compatibilidad-el-eje-de-levas-donde-se-montan-2-levas.jpg)




























