DESIGN OF MACHINERY SOLUTION MANUAL 8-8- 1 PROBLEM 8-8 S tat ement: Desig n a double- dwell c am to mov e a follower from 0 to 1 .5 in in 45 deg , dwell f or 150 deg , fall 1. 5 i in 90 deg and dwell for the rema inder. The total cy cle must take 6 sec. Choose suita ble progr ams for rise and fall to minimize velocities. Plot the SVAJdiagrams. Given: RISE DWELL FALL DWELL 1 45 deg2 150 deg3 90 d eg4 75 degh 1 1.5in h 2 0 in h 3 1.5in h 4 0 in Cycle time: 6 sec S olution: See Mathcad file P0808. 1. The camshaf t turn s 2 rad during the time for one cy cle. Thus, its spee d is 2rad1.047 radsec 2. The modi fied sinu soidal mot ion is defi ned in loca l coordin ates by equation s 8.15 thro ugh 8.19 . The nume rical constants in these SCCA equations are given in Table 8-2. b 0.25 c 0.00 d0.75 Ca 5.5280 3. The SC CA eq uations for th e rise or fal l inter val ( ) are div ided into 5 su binterv als. These ar e: for 0 <=x<=b /2 where , for these equatio ns,x is a local coordinate that ranges from 0 to 1y 1 x ( ) Ca x b b 2 sin b x y'1 x ( ) Ca b 1 cos b x y''1 x ( ) Ca sin b x y'''1 x ( ) Ca b cos b x forb/2 <=x <= (1 - d)/2 y 2 x ( ) Ca x 2 2 b 1 1 2 x b 2 1 8 1 2 y'2 x ( ) Ca x b 1 1 2 y''2 x ( ) Ca y'''2 x ( ) 0 for (1 -d)/2 <=x <= (1 +d)/2 y 3 x ( ) Ca b c 2 x d2 b 2 1 8 1 2 1 d( ) 2 8 d2 cos dx 1 d2 y'3 x ( ) Ca b c 2 dsin dx 1 d2 y''3 x ( ) Ca cos dx 1 d2 y'''3 x ( ) Ca dsin dx 1 d2
Statement: Design a double-dwell cam to move a follower from 0
to 1.5 in in 45 deg, dwell for 150 deg, fall 1.5 inin 90 deg and
dwell for the remainder. The total cycle must take 6 sec. Choose
suitable programsfor rise and fall to minimize velocities. Plot the
SVAJ diagrams.
Given: RISE DWELL FALL DWELL
1 45 deg 2 150 deg 3 90 deg 4 75 degh1 1.5 in h2 0 in h3 1.5 in
h4 0 inCycle time: 6 sec
Solution: See Mathcad file P0808.
1. The camshaft turns 2rad during the time for one cycle. Thus,
its speed is
2 rad 1.047 rad
sec
2. The modified sinusoidal motion is defined in local
coordinates by equations 8.15 through 8.19. The numericalconstants
in these SCCA equations are given in Table 8-2.
b 0.25 c 0.00 d 0.75Ca 5.5280
3. The SCCA equations for the rise or fall interval () are
divided into 5 subintervals. These are:for 0
DESIGN OF MACHINERY SOLUTION MANUAL 8-8-2
for (1 + d)/2
DESIGN OF MACHINERY SOLUTION MANUAL 8-8-3
7. Write the local svaj equations for the second interval,1
DESIGN OF MACHINERY SOLUTION MANUAL 8-8-4
0 60 120 180 240 300 3600
0.5
1
1.5
2DISPLACEMENT, S
Cam Rotation Angle, deg
Dis
plac
emen
t,in
S ( )in
deg
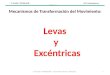
11. Write the complete global equation for the velocity and plot
it over one rotation of the cam, which is the sum ofthe four
intervals defined above.
V v1 1
R 1 2 v2 12 1
R 2 3 v3 23 2
R 3 4 v4
34 3
0 60 120 180 240 300 3602
0
2
4VELOCITY, V
Cam Rotation Angle, deg
Vel
ocity
,in
V ( )in
deg
12. Write the complete global equation for the acceleration and
plot it over one rotation of the cam, which is the sumof the four
intervals defined above.
A a1 1
R 1 2 a2 12 1
R 2 3 a3 23 2
R 3 4 a 4
34 3
DESIGN OF MACHINERY SOLUTION MANUAL 8-8-5
0 60 120 180 240 300 36020
10
0
10
20ACCELERATION, A
Cam Rotation Angle, deg
Acce
lera
tion,
in
A ( )in
deg
13. Write the complete global equation for the jerk and plot it
over one rotation of the cam, which is the sum of thefour intervals
defined above.