Embed Size (px)
Citation preview

Modal Parameter Estimation: A Unified Matrix Polynomial Approach
Randall J. Allemang, PhD
Professor David L Hrown, PhD
Professor William Fladung
Research Assistant
Structural Dynamics Research I "aboratory Department of Mechanical. Industrial and N udcar Engmccring
University of Cincinnati
Cincinnati, Ohio 4-"221-0072 U.S. A.
ARSTRACT
As many different modal parameter estimation algorithms have evolved over the past twenty years, the ability to view all algorithms from a unified perspective becomes important in order to compare and contrast the numerical characteristics of each algoritlun. An approach that
recognizes the underlying matrix polynomial structme of the numerical algorithms is one approach that achieves this goal. The fnl\nwing development serves a<; a framework to most modal parameter estimation algorithms that have been documented in the literature. Tht: overall approach is given as wdl a.<> the fundamental or basic equation fonnulation for each method. While there arc many implementations of these algorithms in use, that may or may not utilize the theoretical approach given here, the ability to view each method in a conunun framework allows the numerical characteristics of each algorithm to be identified a." advantages and disadvantages of the various methods.
Note that the practical or commercial implementation of these algorithms may be presenteU differently elsewhere in order to reflect the specific numerical solution utilized.
1. Introduction
Modal parameter estimation is a special case of system identification where the a priori model nf the system is known to he in the funn of modal parameters. ( lver the past twenty years, a number
of algorithms have been develnpeU to estimate modal parameters from measured frequency or impulse response function Uata.
Modal Parameter Estimation Algorithms
CEA Complex Exponential Algorithm P-21
LSCE I ,ea.<;t Squares Complex Exponential [1.2]
PTll Polyreference Time J)omain [30,31]
lTD Ibrahim Time Domain 19 -121
MRITD Multiple Reference Ibrahim Time I )omain [9[
ERA Eigensystem Realization Algorithm [l:"\,2:"1]
PFD Polyreferencc Frequency Domain rg,1~-21.24.33J
SFD Simultaneous Frequem:y Domain Pl
MRFD Multi-Reference Frequency Domain [4[
RFP Rational Fraction Polynomial 1281
OP Orthogonal Polynomial 125.26.2~1
CMIF Complex Mode Indication Function [26)
1:"-BLE 1. Acronyms- Modal Parameter Estimation Algorithms
While must of these individual algonthms. summarized in Table I and 2. ,u-c well undcrstoud. the comparison of one algmithm to another has become one of the thrusts nf current research in this Jrca. Comparison of the different al~mithms is possible when the
algmithms are refonnulated using a corrunon mathmatical struc
ture. This reformulation attempts to characterize different classes of modal parameter estimation techniques in terms of the structure of the underlying matrix polynomials rather than the phys1cally based models useU historically. Since the modal parameter estima
tion process involves a greatly over-determined problem (mme data than independent equations). this refonnulation is helpful 111
understandmg the different numerical characteristics tlf each algorithm and, therefore, the slightly different estimates of modal parameters that each algorithm yields. As a part nf this refonnula
tion of the algorithms, this work ha." focussed on the development of a conceptual understanding of modal parameter estimation technology. This understanUing involves the ability to conceptualize the measured data in terms of the concept of Chamcteri.Hic s·pace. the data domain (time. frequency, spatial), the evaluation nf the order of the problem, the condensatiun of the data. anU a conmwn parameter estimation theory that can serve <L" the hasis for developmg. any of the algorithms in use today. The following sections will review these concepts as applied to the current modal p.trameter estimation metbotlology.
2. Definition: Modal Parameters
Modal identification involves estimating the modal parameters of a structural system from measureU input-output data. Most cum~nt modal parameter estimation is ba.-.ed upon the measured data heing the fn:quency response function or the equivalent impulse resptlllSC function. typically fouml hy inverse Fourier transfonnin,? the fre
quency response function. Modal parameters include the complex-
501
( )utput I)( )r
Input DOF
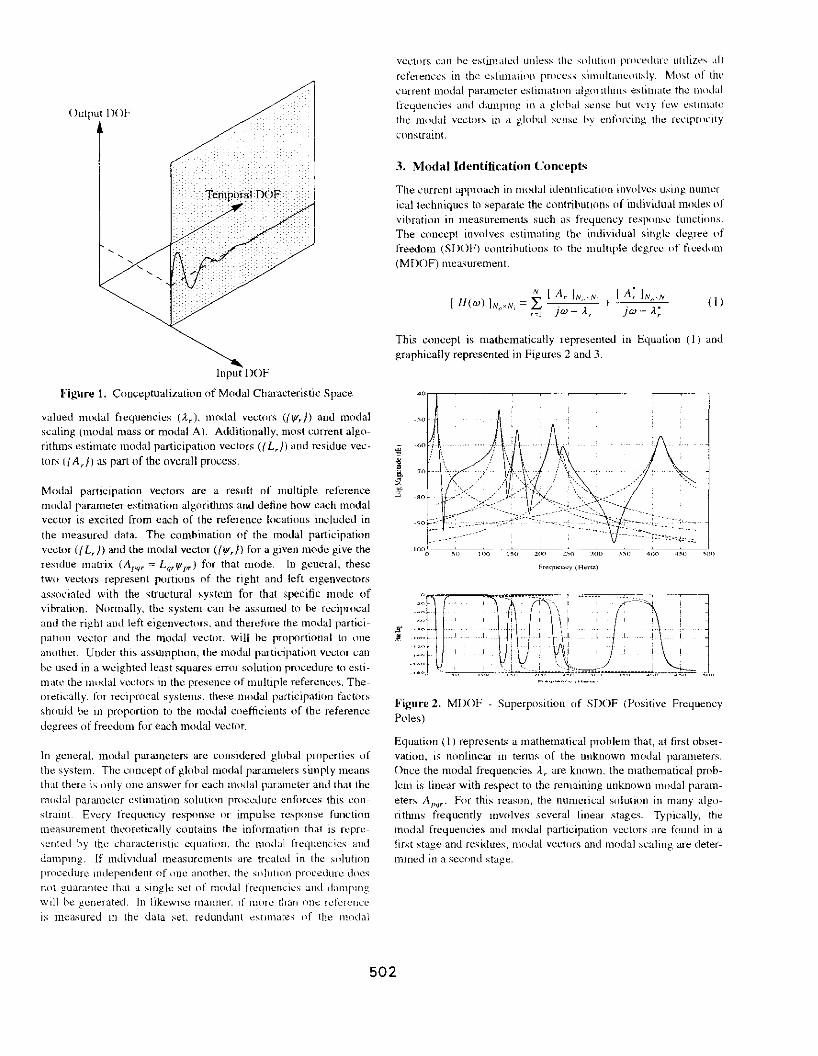
Figure 1. Conceptualization of Modal Characteristic Space
valued modal frequencies (A,), modal vectors ({IfF,}) and modal scaling (modal mass or modal A). Additionally, most current algorithms estimate modal participation vectors ({ L,}) and residue vectors ({A,}) a.·.; part of the overall process.
Modal participation vectors are a result of multiple rc!Crence modal parameter estimation algorithms and define how each modal vedor is excited from each of the reference locations induded in the measured data. The combination of the modal participation vector ({ Lr}) and tbe modal vector ({IfF,}) for a given mode give the residue matrix (A1"i,:::: Lqr'l'pr) for that mode. In general. these two vectors represent portions of the right and left eigenvectors asso(.'iat~d with the structural system for that specific mmlc of vibration. Normally, the system can he assumeJ to be reciprocal ami the right and left eigenvedors. and tht:refore the modal participatinn vector and the modal vector. will he proportional to lllle another. Under this assumptton, the modal participation vector can he used in a weighted least squares error solution procedure to estimate the mudal vectors in the presence of multiple references. Theoretically. for reciprocal systems. these modal participation factors should be in proportion to the modal coefficients of the reference degrees of freedom for each modal vector.
In general. modal parameters are considered global pmperties uf the system. The concept of global mmlal parameters simply means that there is only one answer for each modal parameter and that the modal par~uneter estimation solutinn procedure enforces this constraint Every frequency response nr impulse rt---sponse function measurement theoretically contains the infnrmation that is repre<;entcd hy the charactenstJc equation, !he modal frequencies ami Liampmg. If mdividual measurements are treated in the solution procedure independem of (me another. the S!dution procedure docs not guarantee thai a -"Ingle set of modal frequencies and dampmg wdl be generated. In likewJsc manner. if more thaTl nnL: n:ferenn.' is mea:-.ured Ill the data sd, redundant eslimares (lf the modal
vectms can he estlln<1ted unless th!..-' S!dlltlon pn1cedure utililt''- ,dl references in the estimatinn pruccss simultant:nllsly. Most tlf the current modal parameter estimatinn algorithm . ..; estimate the modal fr!..-'4uencies and d;unpin~ in a glnhal s.:nsc hut vc1 y few estimalc the modal vedors 111 a global s!..-'nsc by enfurcing the renpwcity
constraint.
3. Modal Identification Concepts
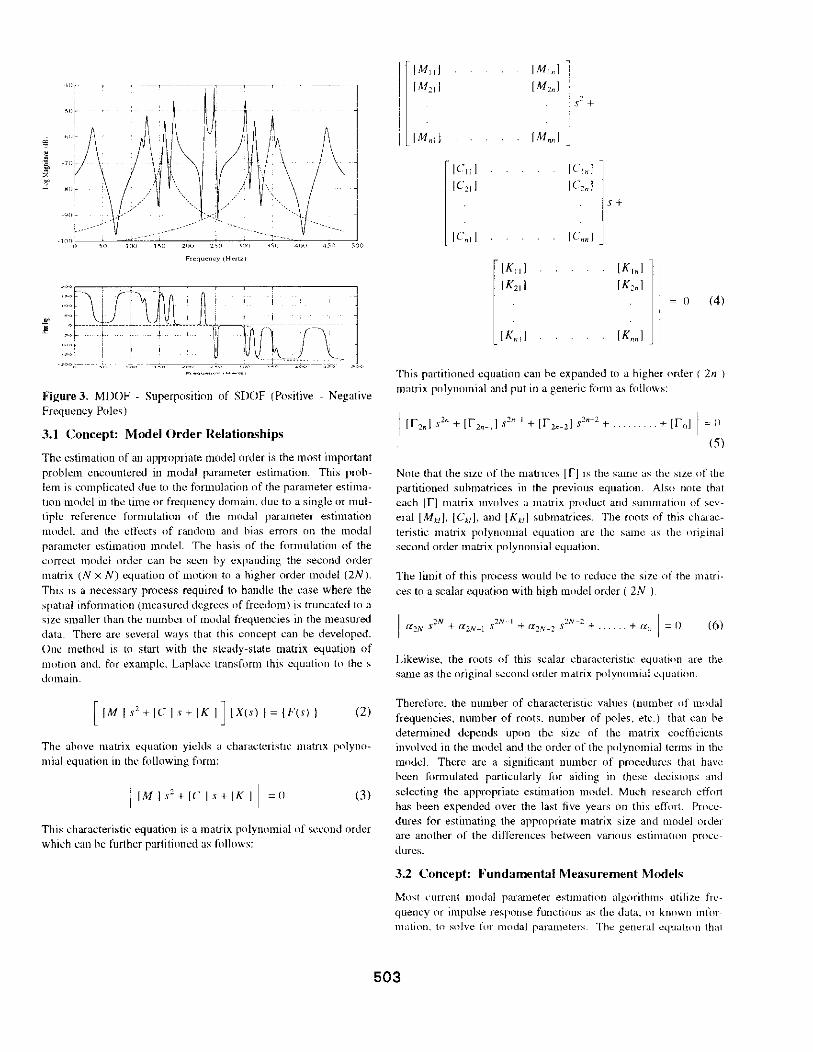
The current approach in modal identification invulvcs using numerical techniques to separate the contributions uf individual modes of vibration in measurements such as frequency response functions. The concept involves estimating the individual single degree of freedom (SDOF) t:ontributions to the multiple degree of fr!..-'edum (MDOF) mca<;urcment.
N
[ H(w) IN0,N, = L (I)
,-1
This concept is mathematically represented in Equation ( 1) and graphically represented in Figures 2 and 3.
"" --~0
w ~
~ :t ;o
3 '"
Figure 2. MDOF - Superposition of SDOF (Positive Frequency Poles)
Equation (1) represents a mathematical problem that, at first observation, is nonlinear in terms of the unknown modal parameters. Once the modal frequencies II., arc known. the mathematical prnhlcm is linear with respect to the remaining unknown modal parameters Apqr· For this reason, the numeri!..-'al solution in many algonthms frequently mvolves several linear stage.'-'. Typically, the modal fn:t.juencies and modal participation vectors are found in a first stage and residues, modal vectors and modal scaling arc determmed in a second stage.
502
40 r
"I
j ' ·v ~ ~
-70 r ~
~ "or
1 -40 ~
~------
-lOr! .c-----
0 "' j()(J ]~0 100 l~O 4f)() 45(> 50()
F<e'luency (H.,.rtz)
·_--·-·f_·--~:_r· '.\u· , ~~ .. _ , , 'J 1_, Lt;·· : -_·iriN- ~---·-·· ·J· --y ! ! ' ~ ;' ·- __ t\=-"·-~- \_ __
Figure 3. MDOF Superposition of SDOF (Positive Negative Frequency Poles)
3.1 Concept: Model Order Relationships
The estimation nf an appropriate model order is the most important problem encounteretl in modal parameter estimation. This problem is complicated due to the formulation of the parameter estimation model in the time or frequency domain. due to a single or multiple reference formulation of the modal parameter estimation mudd. and the effects of random and hias errors on the modal parameter estimation model. The basis of the formuhltinn of the correct model order can he seen by expanding the second order matrix (N x N) equation of motion to a higher order model (2N).
This ts a necessary process required to handle the case where the spatial information (measured degrees of freedom) is truncated to a stze smaller than the number of modal frequencies in the measureti data. There arc several ways that this concept can he developed.
Om:: method is to start with the steady-state matrix equ<ltion of motion and. for example. Lapla~..~e transform this equation tn the s d(Jmain.
[ IM Is'+ IC I'+ [K I] IX(sl I~ {F(sl I (2)
The above matrix equation yields a charadcristic matrix polyno
mial equation in the following form:
(3)
This characteristic cquatinn is a matrix polynomial of second order which can he further partitioned as follows:
[M11J IM,,I [M, I [M,,I
s: +
IM,11i IMnnJ
[C, I [Crnl
1 IC, I [C,,I
Is+ [C,, I fCnnl j
[K, I [K,,[ IK, I [K,,I
0 (4)
[K,,[ [K,.,,]
This partitioned equation can he expanded to a higher order ( 2n ) matrix polynomial and put in a generic fnrm as follows:
llr I 2" If I '" ' If I '" 2n S + 2n-l S + 2n-2 S '+ ......... +Ifni I :::()
( 5)
Note that the size of the matrices [f] is the same as the size of the partitioned suhmatrices in the previous equation. Also note that each rn matrix involves a matrix pwduct and summation of scv~ era] [Mkd• [Ck1], and (Kkfl suhmatrices. The mots of this ch.rrac
teristic matrix polynomial equation arc the same as the mi,~;inal
second order matrix polynomial equation.
The limit of this process would he to reduce the size of the matri
ces to a scalar equation with high model order ( 2N ).
. + ul! I ::: () (6)
Likewise, the roots of this scalar characteristic equation are the same as the original second order matrix polynomial equation.
Thcrcfurc. the number of characteristic values (number of modal
frequencies, number of roots. number of poles. etc.) that can he determined depends upon the size of the matrix cocfficienls involved in the model and the order of the polynomial terms in the model. There arc a significant number of procedures that have been formulated particularly for aiding in these decis1011" and
selecting the appropriate e"timatinn model. Much research effort has been expended over the last five years on this cffnrL Prncedures for estimating the appropriate matrix size and model nnle1 are another nf the differences helween various estima(inn proce
dures.
3.2 Concept: Fundamental Measurement Models
Most current modal parameter estimation algorithms utilize fre
quency nr impulse response functions as the data. nr known informalwn. tn solve for mndal rarameters The general equatJOn tha1
503

~.-an be us\.'d ((l represenlth~o: rdatH•nship b\::tWt:en the m..::a.-;un:d frequ~.:ncy response function matrix and the modal par;uneters is shuwn in Equations (7) and (81.
(7)
Impulse respnnsl: functions are rarely directly measured but are ..._·akuhltcd frnm a:-.sociated frequency response functions VJa the inverse fFT algorithm. The general equation that can be used to represent the relarionship between the impulse response function m<Jtrix and the mm!Jl parameters is shown in Equatior1s (9) and
I I IJ).
Many mmbl parameter estimation algorithms have been originally formulated from Equations (7) through ( 10). Hnwever. a more general development for all algorithms is based upon relating the above equations to a general matrix polynomial approach
3.3 Concept: Characteristic Space
From a conceptual viewpoint, the measurement spa~..:e of a modal identification problem can be visualized as occupying a volume wtth the coordinate axes defined in tt!nns of the three sets of char
acteristics. Two axes of the conceptual volume correspond tn spatial information and the third axis to temporal information. The spatial coordinates arc in terms of the input and output degrees of freedom (I)( )f) of the system. The temporal axis is either time or
frequency depending up()ll the domain of the measurements. These three axes define a 3-D volume which is referred to as the Clw.mcteristic Space as noted previously in Figure I.
This space or volume represt:nts all possibk measun.:!l1etlt data as expressed by Equations (7) through ( 10). This conceptual representation ts very useful in understanding what data supspace ha..<> been measured. Also, this conceptual representation is very useful in recognizing hnw the data is organized and utilized with respect
to different modal parameter cstimatinn algorithms. Information parallel to nne of the axis consists tJf a .'-'olution compused of the -..uperposition of the charaderistics defined hy that axis. The other twu characteristics determine the scaling of each term tn the superptlSition
Any stmctural testing procedure measures a subspace of the tntal pnssihle data available. Modal parameter estunatiun algonthms may then usc all of this subspace or may choose tn further limit the data to a more restrictive subspace. This is nnl a problem ~ince Jt
i::- themetically po:-;sihlc to estimate the characteristto. pf the total
~pare by measuring a suh~pace which samples all three charadertsttcs. Experimentally, any point in this space can be measured The p<rrticular suhsp<K·c which is measured and the wetghting of the data within the subspace iu an algorithm ..1re the main differ
ences between the various modal identification prnt:cdures whtch have been developed historically
In general, the amount of information in a measured :-.uhspace greatly exceeds that which is necessary tn solve for the unknown parameters. Another majllr difference between the various modal parameter estimation procedures ts the type of condensation algorithms that arc used to reduce to the data to match the number of unknowtJs (for example, ]ea."t syut.~res (LS). singular value decom
position (SVD), elt:). As is the case with any uvcr-specitled solution procedure. there is no umque answer. The answet that is obtained depends upon the data that is selected. the weighting of the data and the unique algorithm used in the solution prot:ess_
Historically, this point has created some nmfusion since many users expect different methoJ.s to give exactly the same answer
An important realization is lhat various moJ.al identification algn
rithms use a different data subspace. As might be expected, the selection of the subspace has a significant influence on the results. In order to estimate all of the modal parameters, the suhspa~.:e must encompa..;;s a region which includes contributions from all three characteristics. A cla<>stc example is the necessity to use multiple reference (inputs and outputs) data in order to estimate repeul1'd
mots.
Jn the past, many modnl techniques used informatjtlll {data ,"lJh
space) where only nne or two characteristics wen: varied. Fnr example. in the early 1970's, the modal parameter estimation methods of that era only fit one unit impulse function nr one frequency response at a time. In this case, only the temporal charac
teristic is used and as might be expected only temporal characteristics (modal frequencies) can be estimated from the single measurement. In practice. multiple measurements were taken and the spatial information was extracted frnm the multiple measurements hy successive estimation of the residues for each mode frnm each
mea..;;urcment.
As the sophistication of data a~:quisitinn equipment and modal parameter estimation algorithms evolved. later techniques fit the
data in a plane of the characteristic space. For example. this corresponds to the data taken at a number of response points hut from a single excitation point or reference. This representation of a column of measurements is shuwn as one of the planes of information
in Figure 4. Fur this situation. which represents a single input (reference), it is not possible to compute repeated roots ami it is difficult to separate closely coupled modes due to the lack of spatial data. Many modal identification algorithms utilize data taken at a large number nf output DOFs due to excitation at a small number uf tnput DOFs. Data taken in thi:-. manner is consistent with a multi-exCitor type of test. The conceptual representation of several columns nf this potential measurement matrix is shown in Figure 4.
504
Output DOF
Input DOF
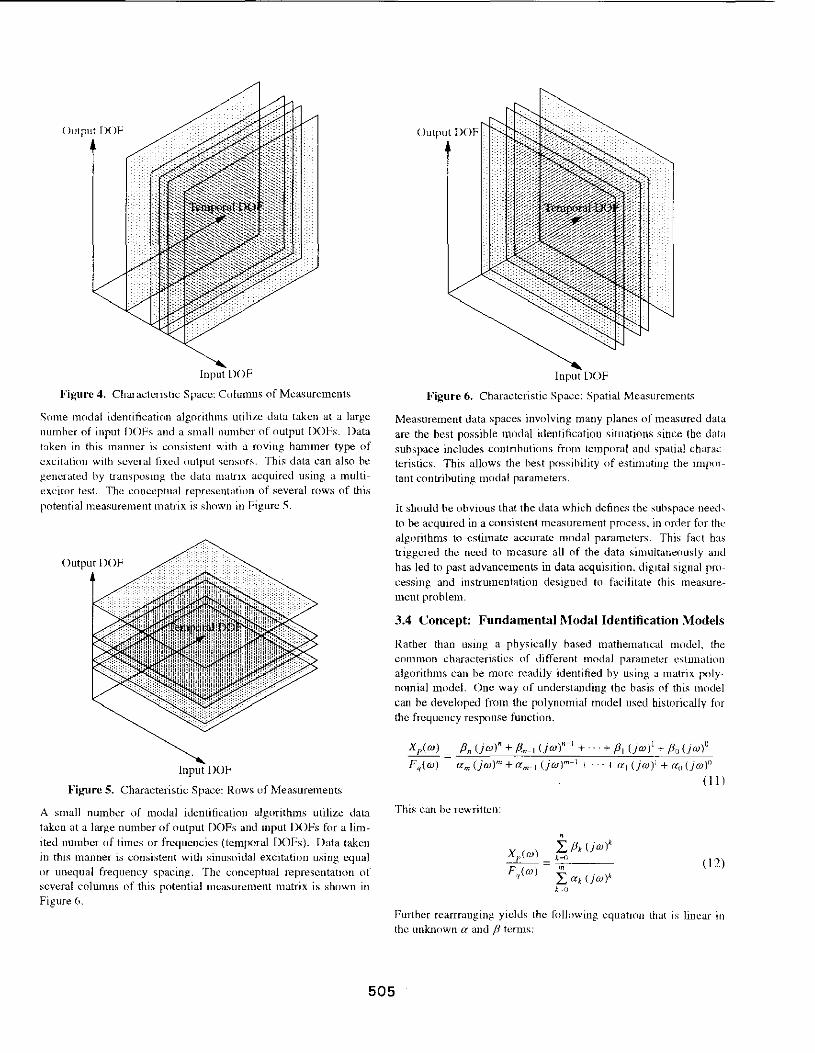
Figure 4. Characteristic Space: Columns of Mea<>urements
Some modal identification algorithms utilize data taken at a large number of input f)OFs and a small number of output DOFs. Data taken in this manner is consistent with a roving hammer type of excitation with several fixed output sensors. This data can also he generated by transposing the data matrix acquired using a multiexcitor test. The conceptual representation of several rows of this potential measurement matrix is shown in Figure~-
Output DOF
Input
Figure 5. Characteristic Space: Rows of Measurements
A small number of modal identification algorithms utilize data taken at a large number of output DOFs and input DOFs for a limited number of times or frequencies {temporal DOFs). Data taken in this manner is consistent with sinusoidal excitation using equal or unequal frequency spacing. The conceptual representation nf several columns of this potential measurement matrix is shown in Figure 6.
505
Output DOF
DOF
Figure 6. Characteristic Space: Spatial Measurement<>
Measurement data spaces involving many planes of mea'iured data are the best possible modal identification situations since the data subspace includes contributions frnm temporal and ~patial characteristics. This allows the best possibility of estimating the important contributing modal parameters.
It should be obvious that the data which defines the subspace need~ to be acquired in a consistent mea<;urement process, in order fur tht: algorithms to estimate accurate modal parameters. This fact ha.<,; triggered the need to measure all of the data simultaneously and has. led to past advancemenL'i in data acquisition, dig1tal signal processing and instrumentation designed to facilitate this measurement problem.
3.4 Concept: Fundamental Modal Identification Models
Rather than using a physically based mathematical model, the common characteristics of different modal parameter estimation algorithms can be more readily identified hy using a matrix poly
nomial model. One way of understanding the ba<>is of this model can he developed from the polynomial model used historically fnr the frequency response function.
P" (jw)" + P." 1 (jw)"- 1 + · · · + p, (jw) 1 +Po (jw)0
am (jw)m +am-I (jw)m 1 + · · · + al (jw): + u 0 (jw)0
This can be rewritten:
m
L fXJ.: (jw)k J.:~o
(II)
(12)
Further rearrranging yields the following equation that is linear in the unknown a and f3 terms:

± "' (jw)' X,.(rul ~ ± jJ, (jw{ 1-q(oJI (13) k- ,, k--0
Th1s model can be generalized to represent the general multiple
1nput, multiple output C<L"c as follows:
Note that the size of the coefficient matrices [ad and [fid wtll nor
mally be N; x N; or N" x N, when the equations are developed from experimental data.
Rather than developing the basic model in terms of force and response infommtion, the models can he stated in terms of frequency response information. The response vector {X(w)} can be replaced hy a vector of frequem:y response functions { H(w)}
where either the input or output is held fixed. The force vector (F(w)j is then replaced by an incidence matrix {R) of the same
size which is composed of all zeroes except for unity at the position in the vector consistent with the driving point measurement (common input and output DOF).
where:
H 1q(w)
rol H 2q(w) 0
H3,(w) 0
(H(wl} ~ (R} ~
Hqq(m)
IH,,,IWI ()
The above model, in the frequency domain, corresponds to an AutoRegressive-Moving-Average (ARMA) model that is developed from a set of finite difference equations in the time domain. The general matrix polynomial modd concept recognizes that both the time and frequency domain models generate essentially the same matrix polynomial models. 1-'or that reason. the Unijit'd Matrix flo(vnrmziul Approach (UMPA) terminology is used to
describe both domains since the ARMA tenninnlogy has been connected primarily with the time domain. Equation (15) can be rearranged into a linear matrix equation a" shown in Appendices D. E and F
Paralleling thi.! development tlf Equation ( I:'), a time domain model repre,.enting the relationaship between a single response degree of freedom and a sin~le input degree of freedom can be stated as follows:
"' " L "' x(l,.' I~ L /3, f(t,.; I (16) k-0
In the time domain, this nndel is commonly known <h the AutoRe
gressive Moving-Average (ARMA(nLn)) model. For the general multiple input multiple output case:
m 11
L [",j (x(l,,, I}~ L [jJ,J 1/it,,, I} ( 17) k-0 k-11
If the discussion is limited to the use uf free decay or impulse response function data, the previous time domain equations can he simplified by noting that the forcing function can be assumed to he
zero for all time greater than zero. If this is the case. the [/h J coefficients can he eliminated from the equations.
(!X)
Equation ( 18) can he rearranged into a linear matrix equation as shown in Appendices A, B and C.
In light of the above discussion, it is now apparent that most of the modal parameter estimation processes avmlable could have been developed by starting from a general matrix polynomial furmulation that is justifiable hased upon the underlying matrix differential equation. The general matrix polynomial formulation yields essentially the same characteristic matrix polynomial equation, for both time and frequency domain data. For the frequency domam data case, this yields:
· · + [ (,r ol :::::: 0 (19)
For the time domain data case, this yields:
[am]Zm+[am-tlZm-l+lam-21zm-2 + ......... +[ao] ::::::()
(20)
With respect to the previous discussion of model order. the characteristic matrix polynomial equation, Equation ( 19) or Equation (20) has a model order of m and the number of moJ.al frequencies or roots that will he found from this characteristic matrix polyno
mial equation will he m times the size of the coefficient matices [a]. In terms of sampled data, the time domain matrix polynomial results from <l set of finite difference equations and the frequellcy domain matrix polynomial results from a set of linear equations
where each equation is formulated at one of the frequencies of the measured data. This distinction is llntxJrtant to note since the roots of the matrix characteristic equation fonnulated in the tUne J.omain are in the z-domain (Zr) and must he converted converted tn the frequency domain ( A.r) while the roots of the matrix characteristic
equation formulated in the frequency domain (A.r) arc already in
the desired domain 1141 Note that the roots that are estimated in the time domain are limited to maximum values J.etennined by the Sampling Theorem relationship (discrete time steps).
[In z, ]
(fr= Rc ~ [
In z, ] mr:::::: Irn Tt
506
Domain Matrix Pnlynomial Order Cneffictents
Algorithm Time FrelJ Zero Low High Scalar Matrix
Complex Exponential Algorithm (CEAJ . . . Least Squares Complex Exponential (LSCE) . . . Polyreference Time Domain (PTD) . . N,xN,
Ibrahim Time Dnmam (lTD) . . N0
X N,
Multi-Reference Ibrahim Time Domain (MRITD) . . N0 xN" Eigensystem Realization Algorithm (ERA) . . N"xN" Polyreference Frequency Domain (PFD) . . N,xN,
Simultaneous Frequency Domain (SFD) . . N,xN,
Multi-Reference Frequency Domain (MRFD) . . N,xN,)
Rational Fraction Polynomial (RFP) . . . Hnth
Orthogonal Polynomial (OP) . . . Hoth
Complex Mode Indication Function (CMIF) . . N"xN,
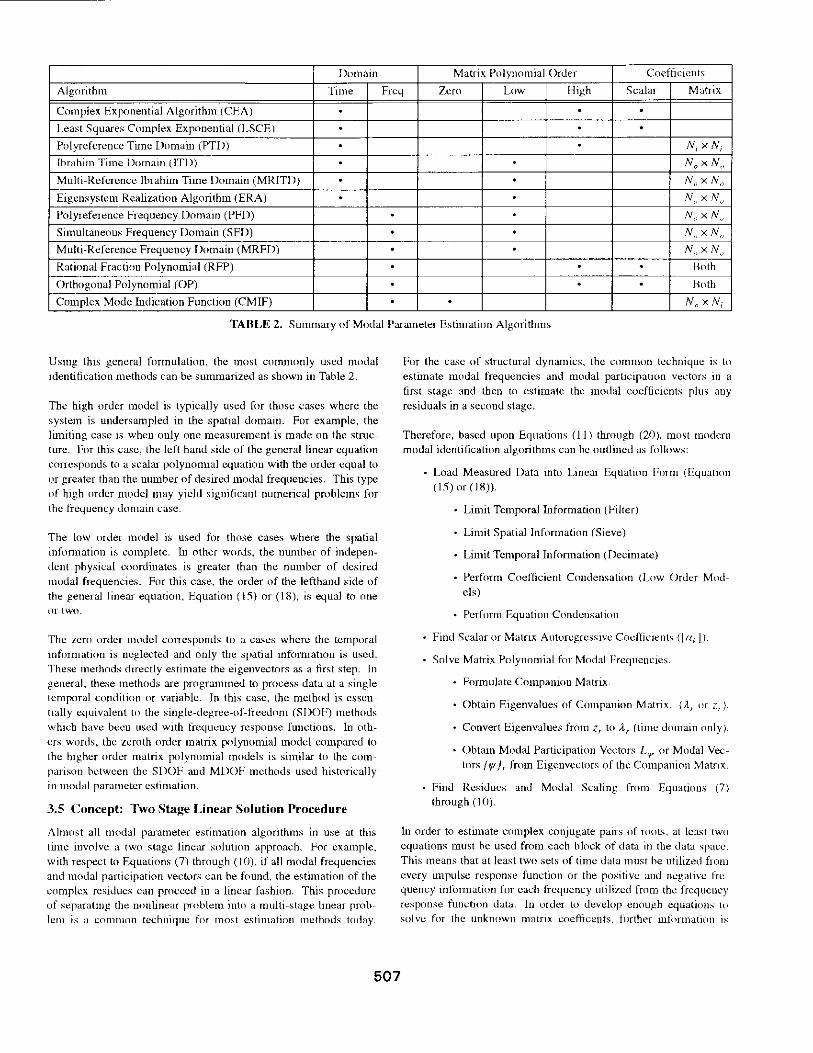
TABLE 2. Summary of Modal Parameter Estimation Algorithms
Usmg this general formulation, the most commonly used modal identification methods can he summarized as shown in Table 2.
The high order model is typically used for those cases where the system is undersampled in the spatial domain. For example, the limiting ca<>e ts when only one measurement is made on the structure. for this case, the left hand side of the general linear equation corresponds to a scalar polynomial equation with the order equal to or greater than the number of desired modal frequencies. This type of high order model may yield significant numerical problems for the frequency domain case.
The low order model is used for those cases where the spatial infunnation is complete. In other words, the number of independent physical coordinates is greater than the number of desired modal frequencies. For this ca<>e. the order of the lefthand side of the general linear equation, Equation (I)) or (18), is equal to one nr two.
The zero order model corresponds to a cases where the temporal information is neglected and only the spatial infonnation is used. These methods directly estimate the eigenvectors a<> a first step. In general. these methods are progranuned to process data at a single tem[XJral condition or variable. In this case, the method is essentmlly equivalent to the single-degree-of-freedom (SDOP) methods which have been used with frequency response functions. In others words, the zeroth order matrix polynomial model compared to the higher order matrix [XJlynomial models is similar to the comparison between the SDOF and MDOF methods used historically in modal parameter estimation.
3.5 Concept: Two Stage Linear Solution Procedure
Almost all modal parameter estimation algorithms in use at this time involve a two stage linear solution approach. For example, with respect to Equations (7) through (10), if all modal freLJUencies and modal participation vectors can he found, the estimation of the complex residues can proceed in a linear fashion. This procedure of separating the nonlinear problem into a multi-stage linear problem is a common technique for most estimation methods today.
507
For the case of structural dynamics, the common technique is to estimate modal frequencies and modal participation vectors in a first stage and then to estimate the modal coefficient.<> plus any residuals in a second stage.
Therefore, based upon Equations (11) through (211), most modem modal identification algorithms can he outlined as follows:
Load Measured Data into Linear Equation Form (Equation (15) or (18)).
Limit Temporal Information (Filter)
Limit Spatial Information (Sieve)
Limit Temporal Information (Decimate)
Perform Coefficient Condensation (Low Order Mndcls)
Perform Equation Condensation
Find Scalar or Matrix Autoregressive Coefficients (] ak J ).
Solve Matrix Polynomial for Modal Frequencies.
Formulate Companion Matrix.
Obtain Eigenvalues of Companion Matrix. (it,. or Zr)·
Convert Eigenvalues from Zr to itr (time domain only).
Obtain Modal Participation Vectors 1-qr or Modal Vectors { ljl j r from Eigenvectors of the Companion Matrix.
Find Residues and Modal Scaling from Eljuations (7) through (I 0).
In order to estimate complex conjugate pairs of rooL,, at least two equations must be used from each block of data in the data space. This means that at least two sets of time data must be utilized from every impulse response function or the positive and negative frequency infonnation for each frequency utilized from the frequency response function data. In order to develop enough equations tu solve for the unknown matrix coefficents, further infnrmatitl\1 is
l:lkcn f[llfll the same block of data nr from uthcr blocks !l[ data in 1he data space until the number of equations equals (If exceeds the number of unknnwns (cocflicients). The exact form and requirements for Equation (IS) or (lR) for many of the com_m(,nly used modal identification algorithms is given in Appendices A through r
Once the matrix cneHit..:ients ((a J) have hecn found, the modal frequencies (A.r or Zr) can be found using a number of numerical techmqucs. V..'hile m certain numerical s1tU<Hions. other numerical approaches may he more robust_ a companion matrix approach
y1elds a consistent concept fot Llt1de!'standing the process. Thcrefnre. the roots of the matrix characteristic equation can he found as the eigenvalues of the associated t:ompanion matrix. The companion matrix can be formulated in one of several ways. The most common formulation is as follows:
-[a],_! -[u],,_::: -[a],_, -[a[, -[ rt[o
l [/] [OJ I 01 I OJ [0]
[OJ [/] [OJ [OJ [0]
I o I [0] [/] [0] [0]
[C[~
[0] [0] [0] [0] Ill]
[0] [0] [0] [0] [OJ
[01 [OJ [0] [/] [0] (21)
Note again !hal the numcri(.;aJ characteristics of the eigenvalue solution of the companion matrix will he different for low order c<~ses compared to high order ca.o;;es for a given data set. The companion matrix ~;an he used in the following eigenvalue formulation to determine the modal frequencies for the original matrix cocmCJcnl equatiOn:
[CJIX l ~ .l[/] {X I (22)
The ei~envcctors that can be found from the cigenvalucCI~envcctor solution utilizing the companion matrix may. or may not. he useful in terms uf modal parameters. The cigcnvectlll' that
is found. associated with each eigenvalue. is of length model order times matrix coefficient size. In fact, the unique (meaningful) portion of the eigenvector is of length equal tn the size of the coeffiCient matrices and is repeated in the eigenvector a model order numher of times. Each time the unique portion of the eigenvector is repeatet.l, the unique portion is multiplied by a scalar multiple uf the associated modal frequency. Therefore, the eigenvectors of the companion matrix have the following form:
!23)
Nutc that. unless the size of the coefficient matrice" is at least as
large as the number of mea~urcment degrees of freedom. only a p;rrtial set of modal coefficienl". the modal participation cncffictents (Lqr) will be found. Fnr the case involving scalar cuefticients, no meaningful modal codticients will he found.
If the s1ze uf the coeffit:ient matricl.!s, and therefore the modal pm·
ticipatmn vector. is less than the largest spatial dimension of the prohlem, then the modal vectors are typically found in a separate solution process using une of Equations (7) through (I 0). Even if
the complete modal vector ({1/f}) of the system is found frnm the eigenvectors of the companion matrix approach, the modal scaling and modal participation vectors for eat:h modal frequency arc nor
mally found in this second stage formulation.
Once the modaJ frequencies and moJaJ participation vectors (DI
modal vectors) have been estimated, the associated modal vectors (or modal participation vectors and modal scaling (residues) can be found with standard least square.<. mcthmls in either the time or fre
quency domain using one of the Equations (7) through (10). The most common approach is to estimate residues in the frequency domain utilizing residuals if appropriate.
The residues are calculated from the product of the modal partici
pation vectors L and the mm1al coefficients If/ (ApQr = L 9,rp,,). Note that if one column q of the modal participation matrix L is normalized to unity, the modal coefficients that arc found will be equal to the residues for that reference Apqr·
3.6 Concept: Data Filtering/Sieving/Decimation
For almost all cases of modal identification, a large amount uf redundancy or overdetenninatinn exists. This means that the num
ber of equations available compared to the number required tu
form an exactly determined solution. defined as the nvcrdetennination factor, will be quite large. Beyond some value of nven.letennination factor, the additional equations contribute little to the result but may add significantly to the solution time. For this rea~rm, the
data space is often filtered (limited within minimum and maximum temporal axis vaJucs), sieved (lim1ted to prescribed input DOFs and/or output DOFs) and/nr decimated (limited number of equations frotn the allowahle tempnral data) in order tn obtain a reason
able result in the minimum time. For frequency response functitHJ (frequency domain) data, the filtering process nonnally involves limiting the usable data within a minimum and maximum frequency at..:corLiing tn the desired frequency range nf interest. l-ior impulse response function {time domain) data, the filtering process normally involves limiting the data within a starting and ending time value. Data sieving involves limiting the data set to t:ertain degrees of freedom that are of primary interest. This nonnally involves restricting the data to spet:ific directions (X, Y and/or Z directions) or specific locations or groups of degrees of frt::ed(Jm. such as components of a large structural system. Even when the available data has been filtered and sieved, as dc,<;<.:ribed ahove, a large ovcrdeternnination factor may still exist. When this occurs, the number of cquatiuns and. therefore, the nverdetermination factor can he further reduced by del:imating some of the remaining available equations. For frequency domain data. this means that information at selected frequencies within the freqent.:y range of
508

mterest can he eliminated. For time domain data, thn., means that information from different portions of the remaming available time range (overlaps, numher of overlaps, time shift between overlaps) can he eliminated.
3.7 Concept: Coefficient Condensation
For the low order modal identilication algorithms, lht.: number of physical coordinates (typically N,,) i>. often much larger than the number of desired modal frequencies (2N). For this situation. the
numerical solution procedure is constrained to solve for N,, or 2N" modal frequencies. This can be very time consuming and is unnecessary. The number of physical coordinates (N") can he reduced to a more n:asonahle size (Nr"" N,, or Np"'" 2N") hy using a decomposition transformation from phys1cal coordinates (N,) to the approximate number of effective modal frequencies (Nr). Currently, singular value decompositions (SVD) or eigenvalue decompositions (ED) arc used to preserve the principal modal mfmmation prior to formulating the linear equation solution for unknown
matrix coefficients 17 ·17] In most cases, even when the spatial information must be condt.:!nscd, it is necessary to use a model urder greater than two to compensate for distortion errors or noise in the data and to compensate for the ca.se where the location of the
transducers is not sufficient to totally define the structure.
3.!1 Concept: Equation Condensation
Several important concepts should be delineated in the area of
equation condensation methods. Equation condensation methods arc used to reduce the number of equations ba.sed upon measured data to more closely match the number of unknowns in the modal parameter estimation algorithms. There are a large number of con
densation algorithms available. Hased upon the modal parameter estJJnation algorithms in use today, the three types of algorithms most often used are:
Least Squares: Least squares (LS), weighted least squares
(WLS), total least squares (TLS) or double least squares (DLS) is used to minirnia: the squared error between the measured data and the estimation model. Historically, this is one of the most popular procedures for finding a pseudo
inverse solution to an over specified system. The main advantage of this method is computational speed and ease of implementation while the major disadvantage is numerical prects1on
Transformations: There arc a large number nf transfnnnation that can he used to reduce the data. In the transfonnation methods, the measured data is reduced by appmximatmg the data hy the superposition of a set of significant vectors. The number of significant vectors is equal to the
amount of mdependent mca'iurcd data. This set of vectors is used to approximate the measured data and used as input tn the parameter estimation procedures.
Singular Value Dccompositwn: Singular Value Decomposition (SVD) i~ an example of one of thl' 11111rc p11pular transformati11n methods. The maJor advantage of these methods is numerical precis inn ;md the disadvantage is etnnputatinnal speed and memory req u 1remcn ts
Coherent Averaging: Cohercnl averaging is an1Jther popular method for reducing the data. In the coherent averaging method, the data is weighted by performing a dot product between the data and a weighting vector (spahal filkr). Information in the data which is not coherent With the weighting vectors is averaged nut of the data. The method IS
often referred to as a spatial or modal filtering procedure. This method has both spt.:!td and precision hut. in nrder to achieve precision. requires a good set of weighting vectors. In general, the optimum weighting vectors are connected with the solution which is unknown. It should he noted that least squares is an example of o non-coherent av\:ragmg pnl
cess.
The least squares ami the transformation procedure>. tends to weight those modes 11f vibration which are well excited This can be a problem when trying to extract modes which are nut well excited. The solution is to use a weighting function for condensa
tion which tends to enhance the mode of interest. This can be accomplished in a number of ways:
In the time domain, a spatial filtt.:!r or a cohertnt averaging process can be used to filter the response to enhance a particular mode or set of modes. For example, hy averaging the data from two symmetric exciter locations the symmetric modes of vibration can be enhanced. A second example would he using only the data in a local area of the system Ill
enhance local modes. The third method is usin~ cstunates of the modes shapes as weighting functions to enhance particu
lar modes.
In the frequency domain, the data can be enhanced in the same manner as the time domain plus the data can he additionally enhanced by we1ghting the data in a frequency band ncar the natural frequency of the mode of interest.
Obviously, the type of equation condensation method that is utilized in a modal identification algorithm has a significant influence on the result" of the parameter estimation process.
3.9 Concept: Model Order Determination
Much of the work concerned with modal parameter esti.matitln since 1975 has involved methodology for determining the cnm.:ct model order for the modal parameter model. Technically. mndd
order refers to the highest power in the matrix polynomial e4uation. The number of modal frequencies found will be equal to the model order times the size of the matrix coefficients, nnnnally N" or N,. For a given algorithm, the size of the matrix coefficients is normally fixed; therefore, dctennining the model order is duectly linked to estimating N, the number of modal frequencies that are of interest in the measured data. As has always been the ease. ;111
estimate for the minimum number of modal frequencies can he easily found hy countmg the number of peaks in the frcqu-.:nc}
response function in the frequency hand of analys1s. This 1s a mmimum estnnate of N since the frequency response function mea
surement may he at a node of one or more mndes nf the system. repeated roots may exist and/or the frequency resolutHlll uf the measurement may be ton coarse to ohscrvc modes that arc close]} spaced in frequency. for these reasons. an appropn<Jtc e-.;timatc td the urder uf the model is of pmne conc~.:rn and 1s the single most
509
illlf1('1t,mt pnthkm ttl nHtdal par:.uneter estllllil{Htn
tn unkr tu determine a rea...,unahle estimate uf the Jll(ll!t:! urder for
c.~ ~et pf tepte:..entalivc data. a number of tt\.:hnH . .JUC::> have been developed a~ guide~ or aids to the user. Much uf the user mter;ll:uon involved in modal parameter estimation invnlves the u:-.:c uf 1hc:-.:e ruuls. Most of the techniques that have been developed alltJ\V
the ust:r to t:stablisb a maximum nwdcl ~trder to l1e t:valuatcd \111 many cases, thi~ is .-.:ct by the memnry limits of the computer algnnthmJ. I lata i.:-; <1cquued hased upon an assumption that the mndcl
urder 1s etJual to this maximum. In a sequential fashion, this data 1s evaluated to dett=rminc if a model order less than the maximum
wdi describe the data sufficiently. This is the point that the user's JUdgement and the use of vanous evaluation aids becomes importatH. SlllllC of the nmunonly used techniques are:
Ern.1r Chart.
Stability Diagram.
~v1ode Indication Functions.
Rank Estimation.
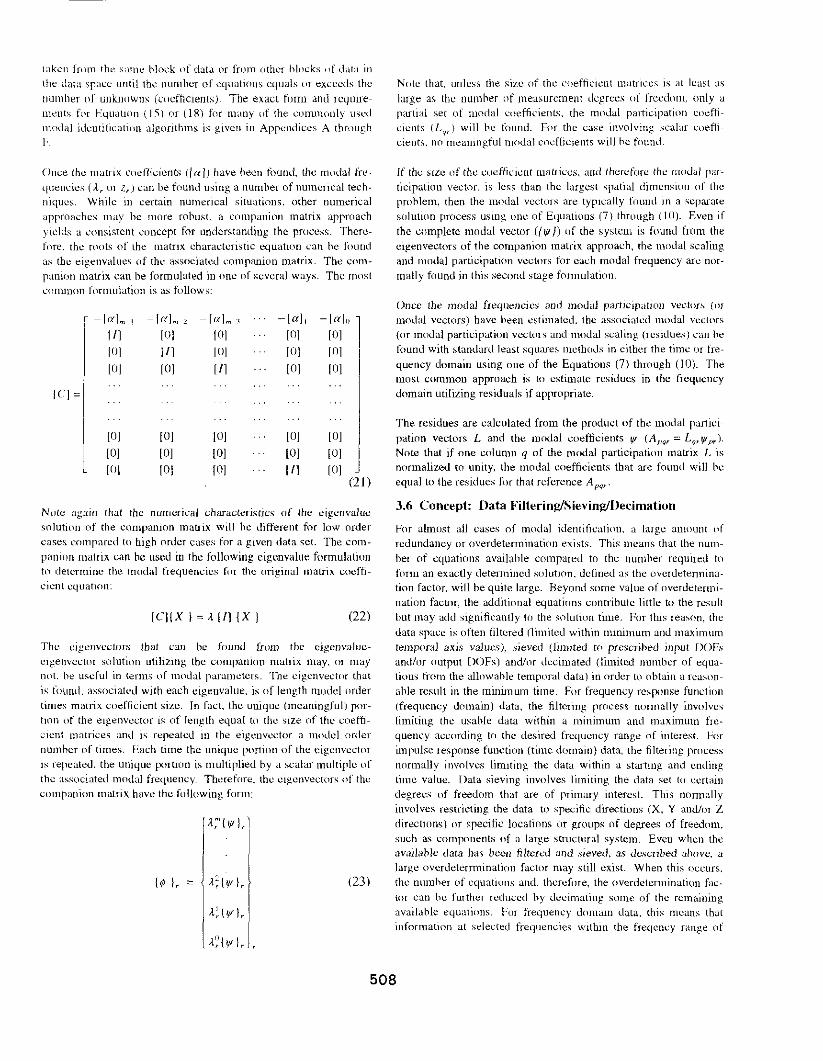
3.9.1 Error Chart One method that has been used to directly indicate the correct model order is the error chart. Essentially, the error chart is a plot of the error in the model as a function of increasmg model order. The error in the model is a normalized quant1ty that represents the ability of the model to predict data that was not involved in the estimate of the model parameters. When the model nrder is insufficient. this model enor will he large but
when the model error reaches the "correct" value, further increase in the model order will not result in a further decrease in the error. Figure 7 is an example of an error chart.
.":
Figure 7. Model Order Determination: Error Chart
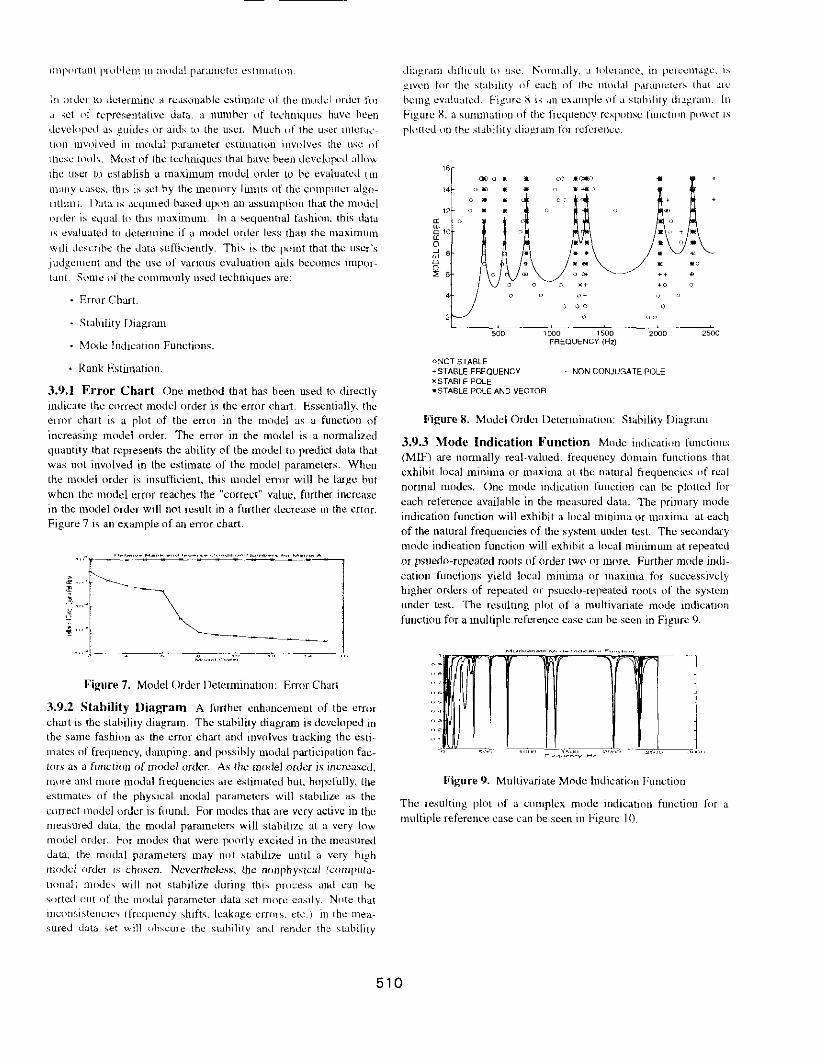
3.9.2 Stahility Diagram A further enhancement of the error chart is the stability diagram. The stability diagram is developed in the same fashion as the error chart and involves tracking the estimates of frequency, damping. and possibly modal participation factors as a function of model order. As the model order is increased, more and more modal frequencies arc estimated but. hopefully, the estunal~.:s of the physical modal parameters will stabilize as the
correct model order is fuund. For mndes that are very active in the measured data, the modal parameters will stabilize at a very low model order. For modes that were poorly excited in the measured data, the mndal parameters may not .'>tabilize until a very high model order is chosen. Neverthele.<.:s, the nonpby.qca! lcnmruta
tinnal l mnde" will not stahilize during thi.'"> proc.:ess and can he sorted out nf the modal parameter data set more easily. Note that I!H:on~i~tcnclC'-. (frequency ~hift<•. leakage errors. etc.) in the measured tbta '-Ct will ohscure the >;tahility and render th<:". '">tahility
diagram difflcull tu usc. Nurm,lily. ~ tuleranc~. in percenta~c. 1:.
~1ven for the stability uf each uf the mmlal p<~r:.Ullctcrs that ,uc bcmg evaluated. Figure X 1s ,m example uf a stability diagran1. In
Figure X, a sununati11l1 of the frequency rexpunsc functi111l powcr 1~ pJutted Ull the stability dia~ram for rcfcre!lcC.
" 000 • • 00 •c::.o 14 0~ • • ·~' 0 • • 12 • •
~ w 010 • ~ 0 • • • ~ 6 . • w • 0 0
~
~ 6 0 ~ H
0 0 •o 4 0 o•
0 00 0
500 1000 1500 2000
oNOT STABLE +STABLE FREQUENCY XSTABLE POLE •STABLE POLE AND VECTOR
FREQUENCY (Hz)
NON-CONJUGATE POLE
• 0 •
•c •
2500
Figure 8. Model Order Determination: Stability Diagram
3.9.3 Mode Indication Function Mndc indication functions (MIF) are nonnally real-valued. frequency dnmain functions that exhibit local minima or maxima at the natural frequencies of real normal modes. One mode indication function can be plotted fnr
each reference available in the measured data. The primary mode indication function will exhibit a local minima or maxima at each of the natural frequencies of the system under test. The secondary mode indication function will exhibit a lol:a! minimum at repeated
or psuedo-rcpeated mots of order two nr more. Further mode indication functions yield local minima or maxima for successively higher orders of repeated or psucdo-repeated roots of the system under test. The resulting plot of a multivariate mode indication function for a multiple reference case can be seen in Figure 9.
I'
'',.,
Figure 9_ Multivariate Mode Indication Function
The resulting plot of a complex mode indication function for a multiple reference case can he seen in Figure 10.
510
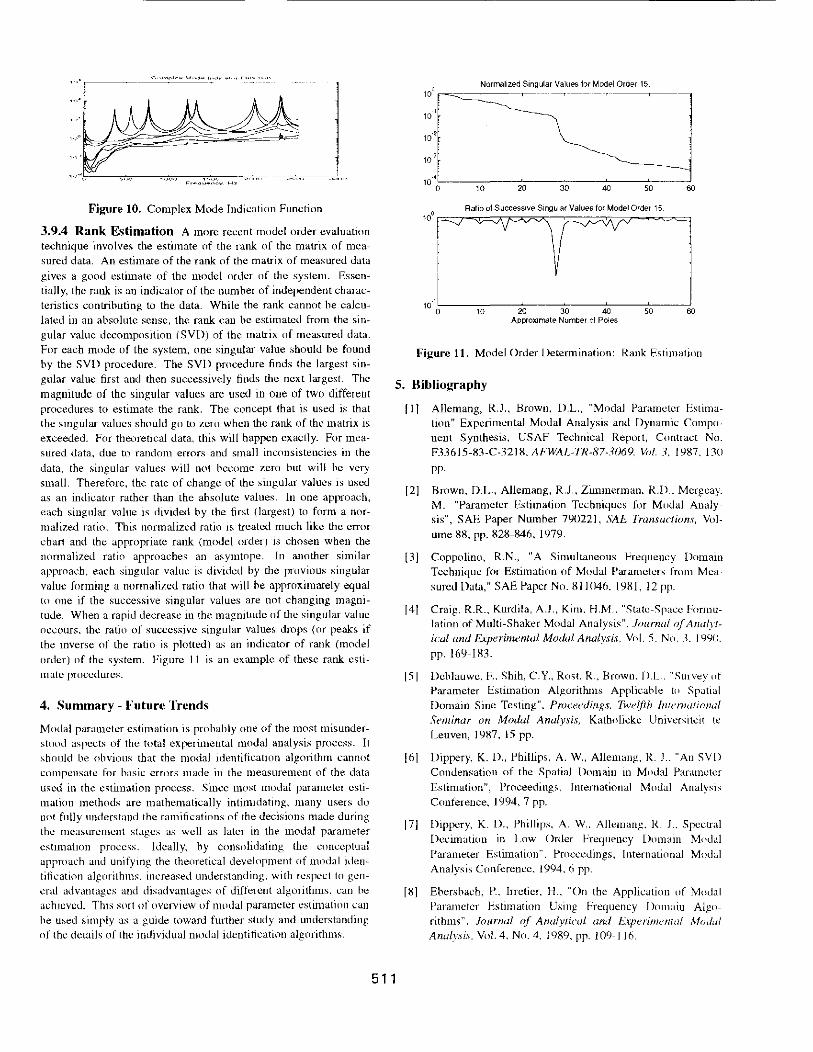
Figure 10. Complex Mode Indication Function
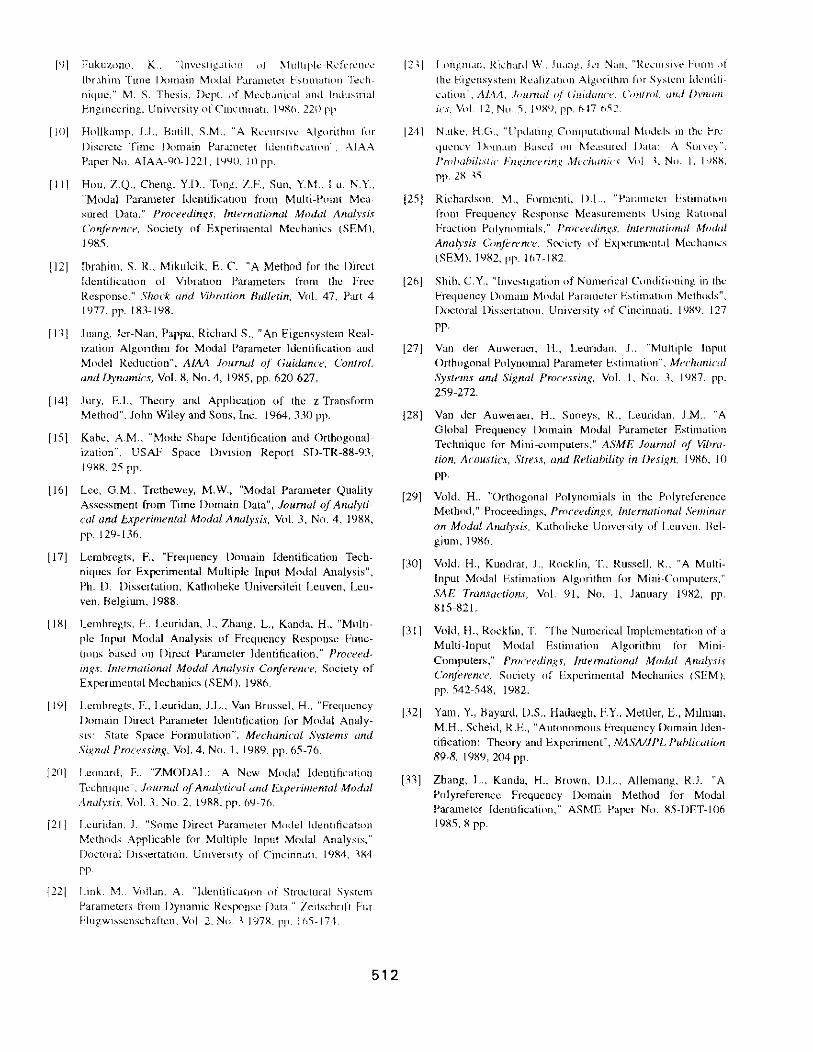
3.9.4 Rank E~timation A more recent model order evaluation technique involves the estimate of the rank of the matrix of nH.:a~ surcd data. An estimate of the rank of the matrix of measured data gives a good estimate of the model nrder of the system. Essentially, the rank is an indicator of the number of independent characteristics contributing to the data. While the rank cannot he calculated in an absolute sense, the rank can be estimated from the singular value decomposition ( SVD) of the matrix of measured data. For each mode of the system, one singular value should be found by the SVD procedure. The SVD procedure finds the largest singular value first and then successively finds the next largest. The magnitude of the singular values are used in one of two different procedures to estimate the rank. The concept that is used is that the smgular values should go to zero when the rank of the matrix is exceeded. For theoretical data. this will happen exactly. For measured data, due to random errors and small inconsistencies in the data, the singular values will not become zero hut will he very small. Therefore, the rate of change of the singular values is used as an mdicator rather than the absolute values. In one approach, each singular value is divided by the first (largest) to form a normalized ratio. This normalized ratio 1s treated much like the error chart and the appropriate rank (model order) is chosen when the normalized ratio approaches an m;ymtope. In another similar approach, each singular value is divided by the provious singular value forming a normalized ratio that will he approximately equal to one if the successive singular values are not changing magnitude. When a rapid decrea'ie in the magnitude of the singular value occours. the ratio of successive singular values drops (or peaks if tht! inverse of the ratio is plotted) a..;.; an indicator of rank (model order) of the system. Figure 11 is an example of these rank estimate procedures.
4. Summary - Future Trends
Modal parameter estimation is probably one of the most misunderstood aspects of the total experimental modal analysis process. It should be obvious that the modal identification algn1ithm cannot compensate for basic errors made in the measurement of the data used in the estimation process. Since most modal parameter estimation methods are mathematically intimidating, many users do not fully understand the ramifications of the decisions made during the measurement stages a." well as later in the modal parameter cstunallon process. Ideally, hy CmiS(Jlidatirig the Conceptual approach and unifying the theoretical development of modal identillcatinn algorithms. increased understanding. with respect to general advantages and disadvantages of different algorithms, can be achieved. This sPrt of overview of nwdal parameter estimation can he uo,ed simply as a guide toward further study and understanding of the details nf the individual modal identification algorithms.
10'
10·~~-----,~oc-----~,o~----~3~0------40~-----o,o~----~60
0 Ratio of SuccessiVe Singular Values for Model Order 15
10
[~~ =~1
, I • 0 10 ~ ~ ~ ~ 00
Approximate Numoer of Poles
Figure 11. Model Order Determination: Rank Estimation
5. Biblio1,..-aphy
[1J Allemang, R.J., Brown, D.L., "Modal Parameter Estimation" Experimental Modal Analysis and Dynamic Component Synthesis, USAF Technical Report, Contract No. F33615-83-C-3218. AFWAL-TR-87-3069. Vol. 3. ln7. 130
pp.
[2J Brown, D.L., Allemang, R.J., Zimmerman, R.D .. Mcrgeay. M. "Parameter Estimation Techniques for Modal Analysis", SAE Paper Number 790221, SAE Tranwctions, Volume 88. pp. 828-846, 1979.
[3 J Coppolino, R.N., "A Simultaneous hequency Domain Technique for Estimation of Modal Parameters from Measured Data," SAE Paper No. 811046. 1981, 12 pp.
[41 Craig. R.R., Kurdi!a, A.J .. Kim. H.M .. "State-Space Formulation of Multi-Shaker Modal Analysis", Journal (if Analytical and Experimental Modal Analysis. Vol.). Nn. ~. I 991l. pp. 169-183.
511
[5] Dcblauwe, F.. Shih, C.Y., Rost. R., Brown. D.L.. "'Survey of Parameter Estimation Algorithms Applicable tP Spatta! Domain Sine Testing". Pmn:edinxs. Twelfth /nremational Seminar on Modal Analysis, Katholieke Univcrsitcit te Leuven, 1987, 15 pp.
[6[ Dippery, K. D., Phillips, A. W., Allemang, R. 1.. '"An SVD Condensation of the Spatial Domain in M11dal Parameter Estimation". Proceedingf.., International Mt1dal Analysis Conference, I 994, 7 pp.
[71 Dippery, K. D .. Phillips. A. W., Allemang. R. 1.. Spccu·al Decimation in Low Order frequency Domain Modal Parameter Estimation·· Proceedings. International Modal Analysis Conference, 1994, 11 pp.
pq Ebersbach, P .. Irretier, H .. "On the Application uf Modal Parameter Estimation Using Frequency Domain Algorithms", Journal of Analyiical and I!J..paimema/ Modal Analysis. Vol. 4, No.4, 19R9, pp. 109-116.
flJ[ Fukuzuno. K.. "lnvc~tt~.Jtiun lll ~1ullipk-Rdcrcnce
lhr~lhim Tune Domain Mudal Parameter b'~timatam Tech
nique." M. S. Thesis. Depl. llf Mt::ch.J.nica\ and lnduSirlal Engmeering. University of C'uKumatl. I YXO. 22( l PI'
[ \0[ Hollkamp . .! . .!.. Hatill. S.M .. "A Recur..;tve -\l~urithm fur
J)iscrete Time \)omain Paramekr ldcntitic,Ltlllll" .-\IAA
Paper No. AIAA-90-1221, I YYtl, I 0 pp.
{II] Hou. Z.Q .. Cheng. Y.D .. Tong. Z.F .. Sun. Y.M .. lu. N.Y., "Modal Parameter ldcntili~;atl~1ll frutn Multi-Pumt Mea
sured Data." Procndings. /!llt'rrwtional Modal Anulvsis Con_fat'nct'. Society nf Experimental Mechanics [SEMl.
198S.
[121 Ibrahim. S. R .. Mikulcik. E. C. "A Method for the llircct fdentitication of Vibration Parameters frnm the Free Response." S'Jwck and Vihration Rullt'tin, Vnl. 47. Part 4
1 Y77. rr- 183-I Y8.
[13] .luang, Jer-Nan. Pappa. RichardS .. "An Eigensystem Real
ization Algorithm for Modal Parameter Identification and Mndd Reduction". AIM Journal of (1uidanct', Control. and !Jynamics, Vol. 8, No.4, 1985, pp. 620-627.
[ !4J Jury, E. I.. Theory and Application of the z-Transform Method". John Wiley and Sons, Inc. 1964,330 pp.
[ 15] Kabe, A.M .. "Mode Shape Identification and Orthogonal
ization" USAF Space Division Report SD-TR-88-93,
I9XX. 2'> rr-
[ 16] Lee, G.M .. Trethewey, M.W., "Modal Parameter ()uality
Assessment from Time Domain Data", Journal of Analytical and Experitnt'ntal Modal Analysis, Vol. 3. No.4, 198R,
rr- 129-m,_
[ I7] Lcmbregt<>, F., "Frequency Domain Identification Tech
niques for Experimental Multiple Input Modal Analysis",
Ph. D. Dissertation, Katholiekc Universiteit Leuven, Leu· ven, Belgiwn. 1988.
[ 18[ Lemhrcgts, F .. Lcuridan . .1 .• Zhang. L., Kanda. H., "Multi
ple Input Modal Analysis of Frequency Response Func
tions bascO un Direct Parameter Identification." Proct't'dings. International Modal Analysis Conference, Society of Ex.perunental Mechanics (SEM). IY86.
[ IY] Lembregl<>, F., Leuridan. J.L.. Van Hrussel. H .. "Frequency
Domain Direct Parameter Identification for Modal AnalySis· State Space Fnnnulatwn". Mahanical .\vstt'ms and Signal Processing. Vol. 4. No. I. 1989. pp. 65-76.
(20] Leonard. F.. ''ZMODAL: A New Modal Identification
Techmque". Journal of Analytiealand Expaimental Modal Analysis. Vol. .'. No. 2. 1988. pp. 69-76.
[21] I .curidan . .1. "Some Direct Parameter Model IdentificatHlll
Methods Applicable fnr Multiple Input Modal Analys1s,"
Doctoral Dtssercatwn. Umversrty of Cincinnati. 1984. 1R4
rr
[22] !.ink. M Vn\Lm. A. "IdentitlcatJnn ()f Structural System
Parameters from Dynamic Rcspnnsc Data." /.cJtschnft F-u1 FlugwJ:>.,.,enschaften. Vol. 2_ Nu. ~ I 97X. pp. I t-:"i-! 7-1-
512
[2 q I ungm.tn, Ri ... ·h~trd W. Ju~l!l~ .. l.-1 Nan, "R,_·.._·tiiSJ\'t' hnm llf
the Eigensy.-.;tem Kt~,llizatilltl Algorithm fm Sy~tcm ldentili
c .. tti()n" .1./A.A . .luumai ~~1 (;uidwu·t>_ Control. u11d 0\'1111111· in·. Vul. 12, NP. "i. 19X9, pp. O---l7-0'i2
[24] Natke, H.Cl .. "Upd<lling C'llmputational Mllliels in the r--n: qucnn \)umaltl Hased un Me,tsured !lata· A Survey".
l'rol>ahiltstic F'nginet'ring ,\tlecfwnid Yld. ~. Nu. \. l lJXX,
pp. 2X- ~."i
[25} Richardson, M., Fmmenti, lU ... "~'aramdcr btunat1un
frum Frequency RcspllllSC Measurements Using Ratiunal
Fwction Polynmmals." Pmceedings, lnlt'malionai iHodal Analysis Confen:-nce. Society nf C:xpcruncntJl Mel.'hanJc . ..;
(SEM). IYn pp. ln7-IX2.
[26] Shih. C.Y.. "Inve~tigation uf Numerical Conditinnin~ in the
frequency l)JHnain MlHlal Parameter E:--.timutillll Mcth1Kls". Doctoral Dissertation. University of Cincinnati. JLJ89. 127
rr-{27] Van der Auweraer. H., Leuridan. .1.. "Multiple Input
Orthugonal Polynomial Parameter Estimation". Mechllniml Systems and Signal Proct>Ssing, Vol. 1. No.3. 1987. pp.
259-272.
{28] Van dcr Auweraer, H .. Snoeys, R., Leuridan. J.M .. "A Global Frequency Domain Modal Parameter Estimation
Technique for Mini-computers," ASME Journal n.f Vilmi· lion. Acoustio, Strl!ss, and Rl'liahility in [)esign, 19XO. 10 pp.
[29] Void, H., "Orthogonal Polynomials in the Polyrcferencc Method," Proceedings. Pmcet'dings, lntt'rnatiotwl Seminllr on Modal Analysis, Katholicke University of Leuvcn. Hclgium, 1986.
[30] Vol d. H., Kundrat, J., Rocklin, T.. Russell. R .. "A MultiInput Modal Estimatitlll Algt1rithm f(Jf Mini-Ctllnputcrs."
SAE Transactions, Vol. 91, No. 1, January I YX2, pp. 815-821.
{31] Vold, H., Rocklin, T "The Numerical Implementation of a
Multi-Input Modal Estimatinn Algorithm for Mini
Computers," Pron't'Jings, Jnrarwtional Modal AnalyJi.\· Confaence. Society of Experimental Mechanics (SEM}.
rr- 542-548, !982.
[321 Yam, Y., Bayard, lJ.S., Hadaegh, FY., Mettler. E., Milman, M.H., Scheid, k.E., "Autonomous Frequency Domain Iden
tification: Theory and Experiment", NA.\'A/1 /'L /'ubiication 89-8. 1989, 204 pp.
[33] Zhang, L.. Kanda, H .. Hrown. D.L. Allemang, R.J. "A Pnlyreference Frequency Domain Method for Modal Parameter Identification." ASME Paper Nn. X:"i-DET-106
I98'i. s rr-

Appendix A: High Order Time Domain Algorithm'
Typtcal Algorithms
Complex Exp(mential (CE}
Lea"t Squares Complex Exponential {LSCJ-::)
Polyrcference Time Domain (PTD)
General Linear Equation Formulation
High Order (m ~ 2N!N, or mN, ~ 2N)
Matrix Coefficients (N, x N,)
Basic Equation:
[
I rr,l l [ J
lrrtl fh(t,)]]h(ll )] · · · fh(lm-1 )] . . =
[0:',.,_1 J
where:
- fh(lmJJ
Appendix 8: First Order Time Domain Algorithms
Typical Algorithms
Ibrahim Time Domain (TTl))
Multiple Reference Time Domain (MRITD)
Eigensystem Realization Algorithm (ERA)
General Linear Equation Formulation
Low Order (m::: I and 2N0 :::: 2N)
Matrix Cocfllcients (2N, x 2N,)
Hasi~: Equation:
where:
(24)
(25)
513
Appendix C: Second Order Time Domain Al):orithms
Typical Algorithms
Time Domain Equivalent to Polyreferencc Frequency Dum am
General I jncar Equation Fonnulation
Low Order (m::::: 2 and 2N0 ::::: 2N}
Matrix Cncflicients ( N, x N" )
Hasil: Equation;
where:
(26)

Appendix D: High Order Frettuenfy Domain Algorithms
Typtcal Alg!1rlthm~
Ralinna! Fractit1n Pnlynnmial (RFPl
OrtbtJgonal Pulynomial (OP)
General Linear Jc:quatiun Fonnulatnm
High Order(m ~ 2NIN, ur mN, ~ 2N)
Matnx CpeffiCietHs (N, x N,)
K.tsJc b.jUJtion:
IHJ
where:
IRJ J [rt,._ 1 J
I Pol
I p, J
127)
[H] =[[H(w0 )j (jw0 )1[H(w0 )] (jw,,)'[H(w0 )] · ·· (jw11 )"'
1[H(w0 )]]
I R[ = [ -[R] - l)wo)1 I R] - (JwoJ'IR] · ·- Uwol"IRI]
0 o I
Appendix E: First Order Fre<Juency l>omain Algorithms
Typical Algonthm~
Simultaneous Frequency Domain (SFD)
Multi-Reference Frequency Domain (MRFD)
Frequency Domain Equivalent to lTD, MRITD, ERA
General Linear Equation Formulation
Low Order (m:::: I and 2N., ~ 2N)
Matrix Coefficient~ (2N., x 2N,)
Ha:-;1,_· Equ:llHlll
where:
llj
Appendix F: Second Order Frequency Domain Algorithms
Typical Algorithms
• Pnlyreference Frequency Domam (PFD)
General Linear Equation Fllfll1Uiatinn
Luw Order (m::: 2 and 2N" = 2N)
Matrix Coefficients ( N, x N, )
Basic Equation:
(24)
where:
OJ
514













![Masteroppgave i kryptografi - COnnecting REpositories · 2018-04-14 · Definition2.2(Polynomialparameter[3]). A parameter ais called a polynomial parameter if there exists a constant](https://img.pdfslide.net/doc/110x75/5f4b4997d5678f59a81330db/masteroppgave-i-kryptografi-connecting-repositories-2018-04-14-deinition22polynomialparameter3.jpg)















