Embed Size (px)
Citation preview
1
MODULUL 3: SISTEME UMERICE DESTI ATE
CO DUCERII PROCESELOR
1. Subsistemele de baza ale unei structuri de conducere cu
SCPE/CP
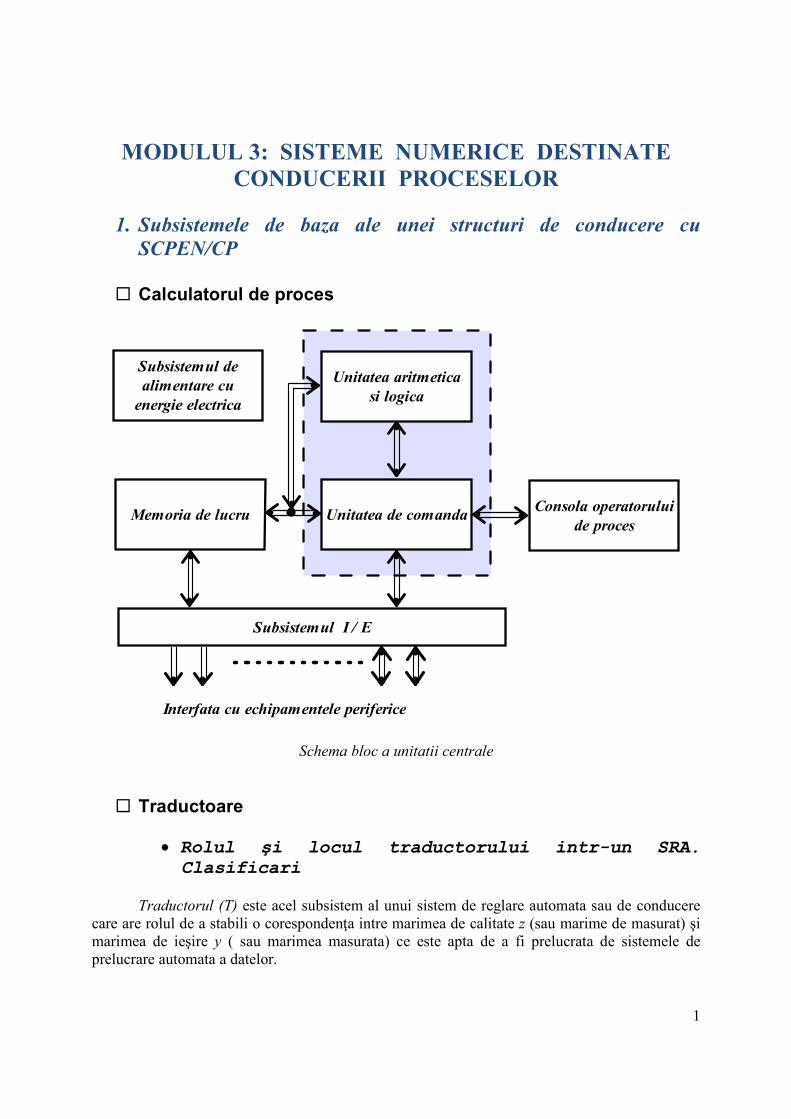
Calculatorul de proces
Subsistemul I / E
Unitatea aritmetica
si logica
Unitatea de comandaConsola operatorului
de procesMemoria de lucru
Subsistemul de
alimentare cu
energie electrica
Interfata cu echipamentele periferice
Schema bloc a unitatii centrale
Traductoare
• Rolul şi locul traductorului intr-un SRA.
Clasificari
Traductorul (T) este acel subsistem al unui sistem de reglare automata sau de conducere
care are rolul de a stabili o corespondenţa intre marimea de calitate z (sau marime de masurat) şi
marimea de ieşire y ( sau marimea masurata) ce este apta de a fi prelucrata de sistemele de
prelucrare automata a datelor.
2
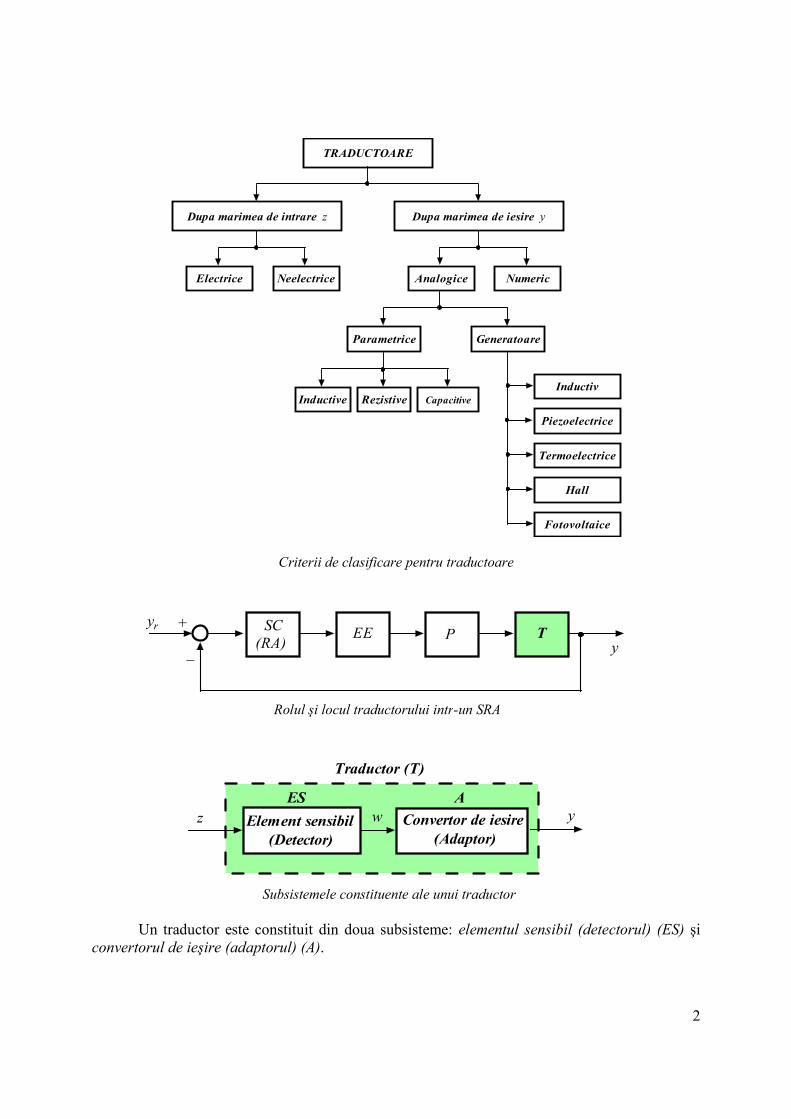
TRADUCTOARE
Dupa marimea de intrare z Dupa marimea de iesire y
Electrice eelectrice umericAnalogice
Parametrice Generatoare
Piezoelectrice
Inductiv
Termoelectrice
Hall
Fotovoltaice
RezistiveInductive Capacitive
Criterii de clasificare pentru traductoare
SC
(RA)EE P T
+
_
yr
y
Rolul şi locul traductorului intr-un SRA
ES A
Traductor (T)
z w yElement sensibil
(Detector)
Convertor de iesire
(Adaptor)
Subsistemele constituente ale unui traductor
Un traductor este constituit din doua subsisteme: elementul sensibil (detectorul) (ES) şi
convertorul de ieşire (adaptorul) (A).
3
• Elementele caracterizante ale unui traductor
Elementele ce caracterizeaza un traductor şi pe baza caruia se pot compara intre ele
diferitele traductoare sunt urmatoarele :
a) natura fizica a marimii de intrare şi de ieşire;
b) puterea consumata la intrare şi cea transmisa sarcinii;
c) caracteristica statica;
d) caracteristica dinamica;
e) pragul de sensibilitate;
f) gradul (clasa) de precizie;
g) nivelul de zgomot.
• Traductoare. Studii de caz
Traductoarele se pot clasifica in funcţie de marimea de intrare in traductoare pentru
marimi electrice şi neelectrice sau in funcţie de marimea de ieşire in traductoare analogice şi
numerice.
i) Traductoarele analogice se impart la rândul lor in doua categorii: parametrice şi
generatoare.
a) Traductoarele parametrice (modulatoare) sunt acele traductoare in care sub
influenţa marimii de intrare se modifica dupa o lege bine determinata, unul din
parametrii electrici (rezistenţa, inductanţa sau capacitate) ai circuitelor electrice a
traductorului. Pentru detectarea acestei modificari traductorul trebuie sa aiba o
sursa de energie auxiliara şi o schema de masura a parametrului care se modifica.
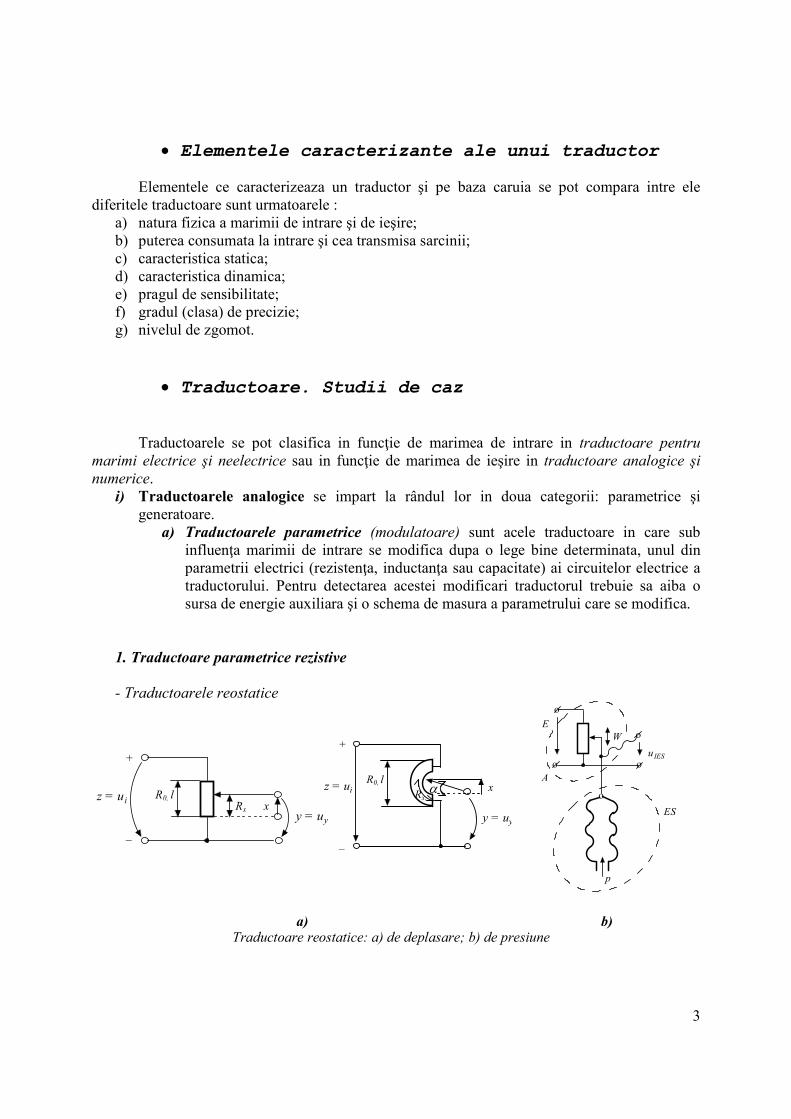
1. Traductoare parametrice rezistive
- Traductoarele reostatice
+
_
z = ui
y = uy
R0, lRx x
+
_
z = ui
y = uy
R0, l
Rx,α x
o
o o
o
o
•
p
ES
u IES
W
E
A
a) b)
Traductoare reostatice: a) de deplasare; b) de presiune
4
- Traductoare termorezistive
- Traductoare tensiometrice
oo
R1
P1
R2
UALIM
z
TC
(Compensator)
TA
(Activ)
P1
UALIM
z
TCTA
o o
R1 R2
P2
A
SM
a) b)
Punţi de masura: a) metoda prin derivaţie; b) metoda de zero
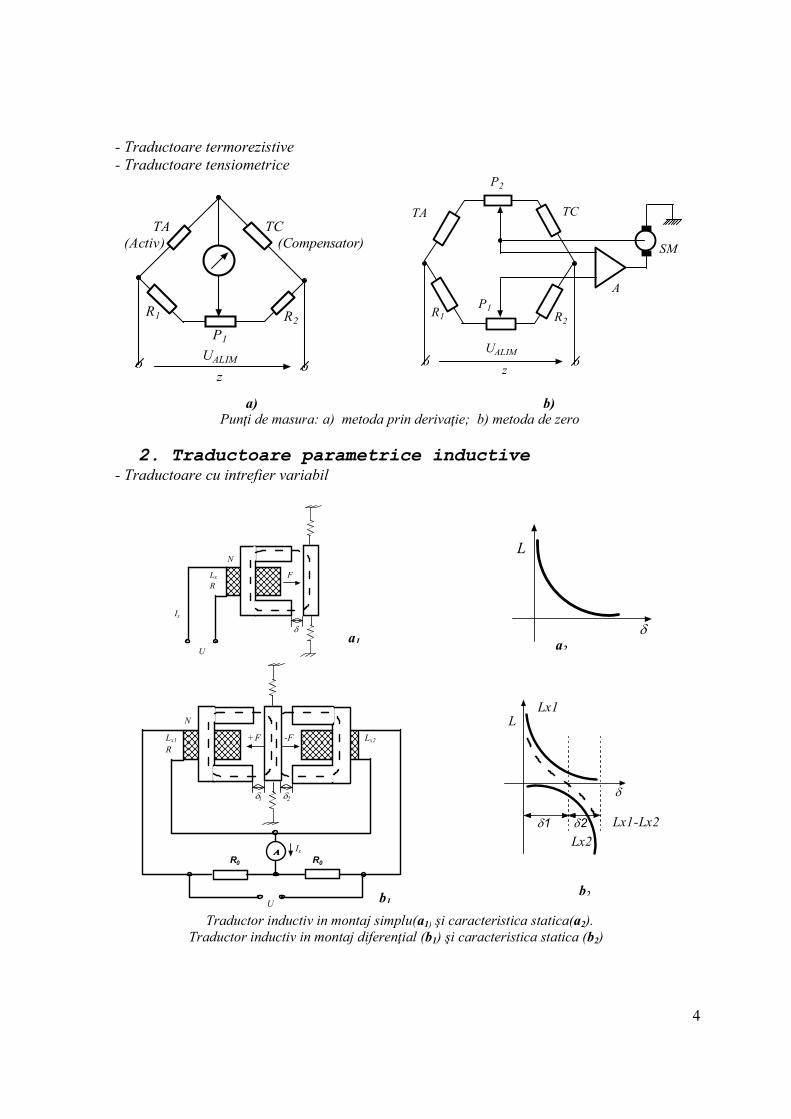
2. Traductoare parametrice inductive
- Traductoare cu intrefier variabil
U
Ix
Lx
R
3
F
δ
L
δ
U
Ix
Lx1
R
3
+F
δ1
Lx2-F
δ2
ΑΑΑΑR0 R0
L
δ
Lx1
Lx2
Lx1-Lx2δ1 δ2
Traductor inductiv in montaj simplu(a1) şi caracteristica statica(a2).
Traductor inductiv in montaj diferenţial (b1) şi caracteristica statica (b2)
a1 a2
b1 b2
5
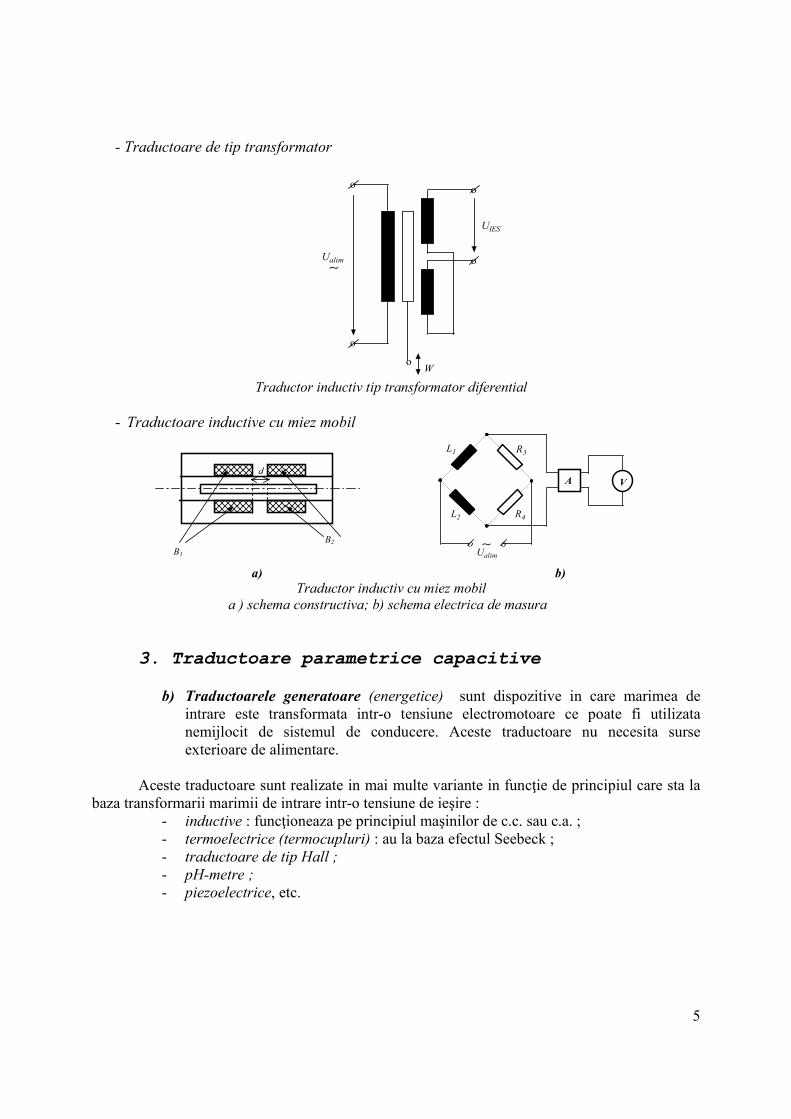
- Traductoare de tip transformator
o
o
Wo
o
oUalim
∼
UIES
Traductor inductiv tip transformator diferential
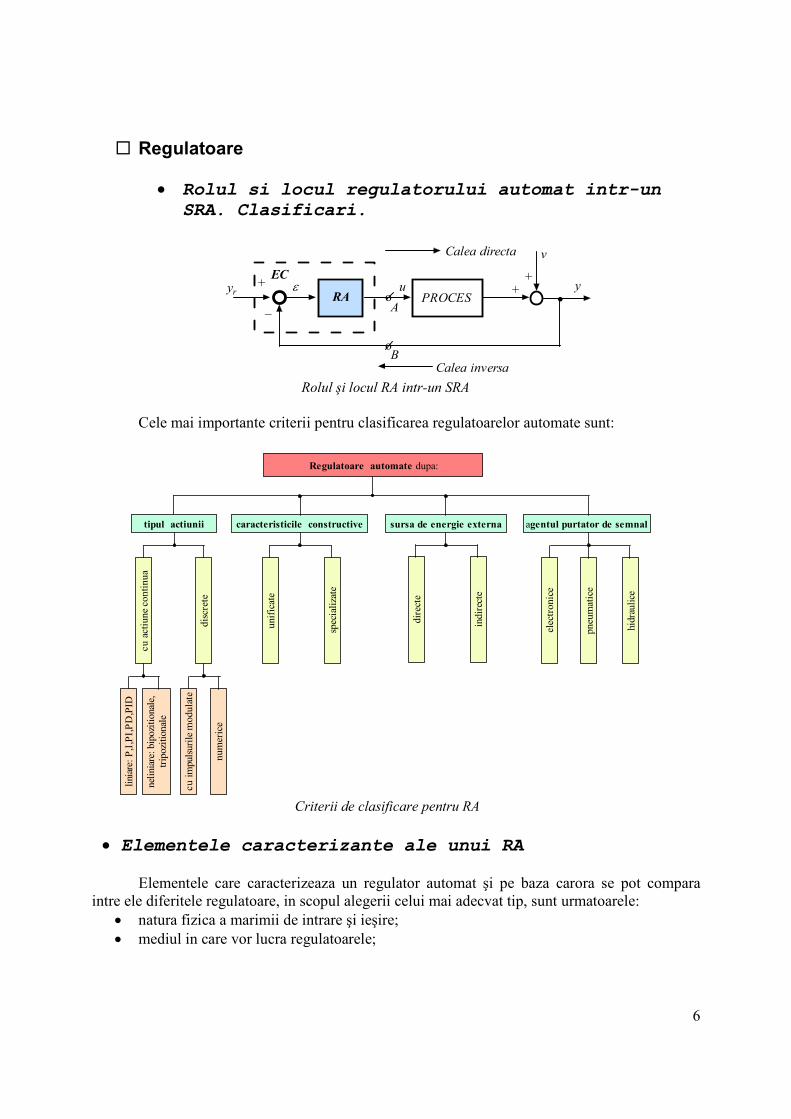
- Traductoare inductive cu miez mobil
B1
d
B2
oo
L1
L2
R3
R4
A V
∼Ualim
a) b)
Traductor inductiv cu miez mobil
a ) schema constructiva; b) schema electrica de masura
3. Traductoare parametrice capacitive
b) Traductoarele generatoare (energetice) sunt dispozitive in care marimea de
intrare este transformata intr-o tensiune electromotoare ce poate fi utilizata
nemijlocit de sistemul de conducere. Aceste traductoare nu necesita surse
exterioare de alimentare.
Aceste traductoare sunt realizate in mai multe variante in funcţie de principiul care sta la
baza transformarii marimii de intrare intr-o tensiune de ieşire :
- inductive : funcţioneaza pe principiul maşinilor de c.c. sau c.a. ;
- termoelectrice (termocupluri) : au la baza efectul Seebeck ;
- traductoare de tip Hall ;
- pH-metre ;
- piezoelectrice, etc.
6
Regulatoare
• Rolul si locul regulatorului automat intr-un SRA. Clasificari.
RA PROCES
+
_
ECεyr
o
o
A
B
u•
y++
vCalea directa
Calea inversa
Rolul şi locul RA intr-un SRA
Cele mai importante criterii pentru clasificarea regulatoarelor automate sunt:
Regulatoare automate dupa:
tipul actiunii agentul purtator de semnalsursa de energie externacaracteristicile constructive
unif
icat
e
cu
acti
une
co
nti
nu
a
dis
cret
e
spec
iali
zate
dir
ecte
indir
ecte
elec
tronic
e
pneu
mat
ice
hid
rauli
ce
lini
are:
P,I
,PI,
PD
,PID
nel
inia
re:bip
ozi
tional
e,
trip
ozi
tional
e
cu
impuls
uri
le m
odula
te
num
eric
e
Criterii de clasificare pentru RA
• Elementele caracterizante ale unui RA
Elementele care caracterizeaza un regulator automat şi pe baza carora se pot compara
intre ele diferitele regulatoare, in scopul alegerii celui mai adecvat tip, sunt urmatoarele:
• natura fizica a marimii de intrare şi ieşire;
• mediul in care vor lucra regulatoarele;
7
• gradul de complexitate al procesului şi performanţele ce se impun marimii reglate. In
general, pentru majoritatea proceselor, legile de reglare P, PI, PD sau PID sunt
satisfacatoare, dar exista procese la care se impun, datorita strategiilor complexe de
conducere, regulatoare cu structuri speciale, cum ar fi cele de tip extremal, adaptiv etc.
Astfel de structuri se realizeaza, insa, de cele mai multe ori, cu structuri numerice;
• posibilitaţile de integrare in sisteme numerice complexe de conducere (calculatoare de
proces);
• parametrii legii de reglare : constanta de timp de integrare TI, constante de timp de
derivare TD, banda de proporţionalitate BP ;
• transferul funcţionarii «automat-manual» şi invers, fara şoc şi fara echilibrare prealabila;
• viteza de raspuns a procesului automatizat (proces rapid sau lent);
• numarul de elemente de execuţie ce pot fi comandate simultan, in paralel, de catre un
regulator;
• tipul elementului de acţionare;
• tipul organului de reglare (normal inchis sau normal deschis);
• caracteristica statica a organului de reglare;
• realizarea siguranţei in funcţionare a procesului la intreruperea semnalelor de masura şi de
comanda.
• Regulatoare automate. Studii de caz.
A. Regulatoare continue
i) Regulatoare continue liniare
a. Regulatoare liniare standard
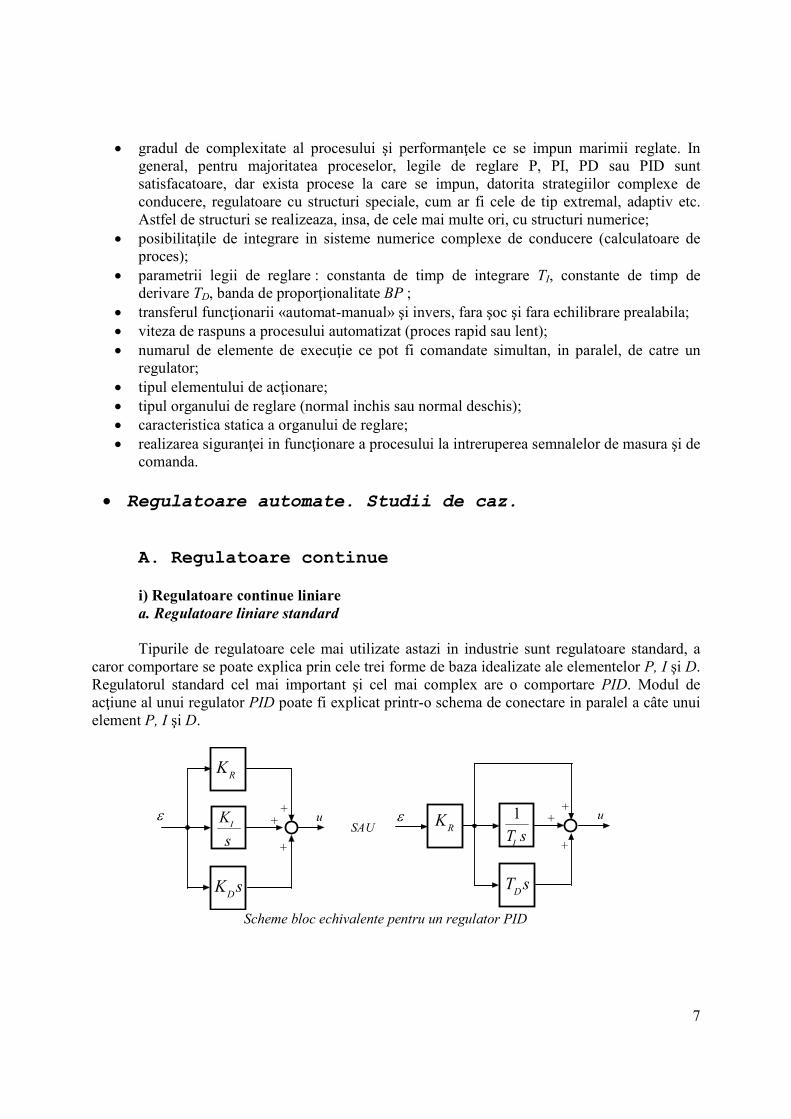
Tipurile de regulatoare cele mai utilizate astazi in industrie sunt regulatoare standard, a
caror comportare se poate explica prin cele trei forme de baza idealizate ale elementelor P, I şi D.
Regulatorul standard cel mai important şi cel mai complex are o comportare PID. Modul de
acţiune al unui regulator PID poate fi explicat printr-o schema de conectare in paralel a câte unui
element P, I şi D.
s
KI
RK
sKD
sTI
1
sTD
RK
+
++
ε uSAU
+
+
u+ε
Scheme bloc echivalente pentru un regulator PID
8
Componenta I
Componenta P
Componenta D
-TI t
a)
0
KR(1-TD)
KR
u(t)
Componenta I
Componenta P
Componenta D
-TI t
b)
0
KR
KR(1-TD/T)
u(t)
T
0 t
KR
u(t)
c)
0 td)TI
u(t)
KR
0 te)
u(t)
KR(1-TD)
KR
KR(1-TD/T)
0 tT
u(t)
KR
f)
.
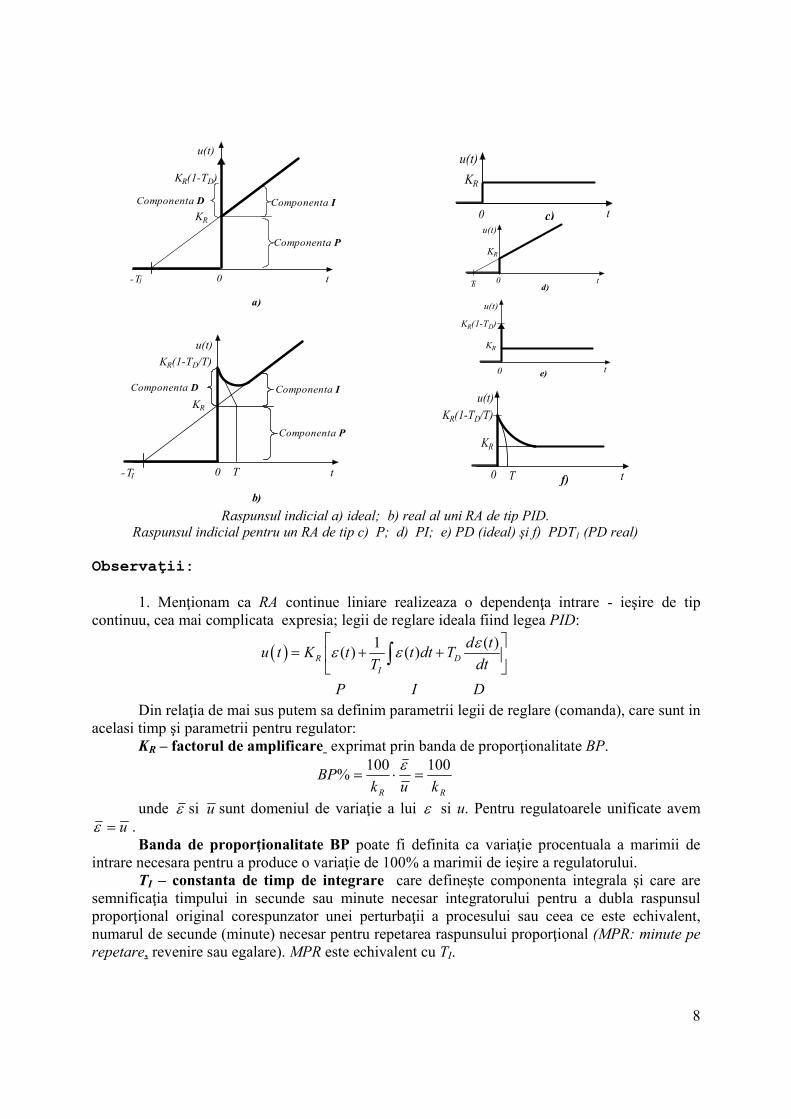
Raspunsul indicial a) ideal; b) real al uni RA de tip PID.
Raspunsul indicial pentru un RA de tip c) P; d) PI; e) PD (ideal) şi f) PDT1 (PD real)
ObservaŃii:
1. Menţionam ca RA continue liniare realizeaza o dependenţa intrare - ieşire de tip
continuu, cea mai complicata expresia; legii de reglare ideala fiind legea PID:
( ) 1 ( )( ) ( )R D
I
d tu t K t t dt T
T dt
P I D
εε ε
= + +
∫
Din relaţia de mai sus putem sa definim parametrii legii de reglare (comanda), care sunt in
acelasi timp şi parametrii pentru regulator:
KR – factorul de amplificare exprimat prin banda de proporţionalitate BP.
RR kukBP
100100% =⋅=
ε
unde ε si u sunt domeniul de variaţie a lui ε si u. Pentru regulatoarele unificate avem
u=ε .
Banda de proporţionalitate BP poate fi definita ca variaţie procentuala a marimii de
intrare necesara pentru a produce o variaţie de 100% a marimii de ieşire a regulatorului.
TI – constanta de timp de integrare care defineşte componenta integrala şi care are
semnificaţia timpului in secunde sau minute necesar integratorului pentru a dubla raspunsul
proporţional original corespunzator unei perturbaţii a procesului sau ceea ce este echivalent,
numarul de secunde (minute) necesar pentru repetarea raspunsului proporţional (MPR: minute pe
repetare, revenire sau egalare). MPR este echivalent cu TI.
9
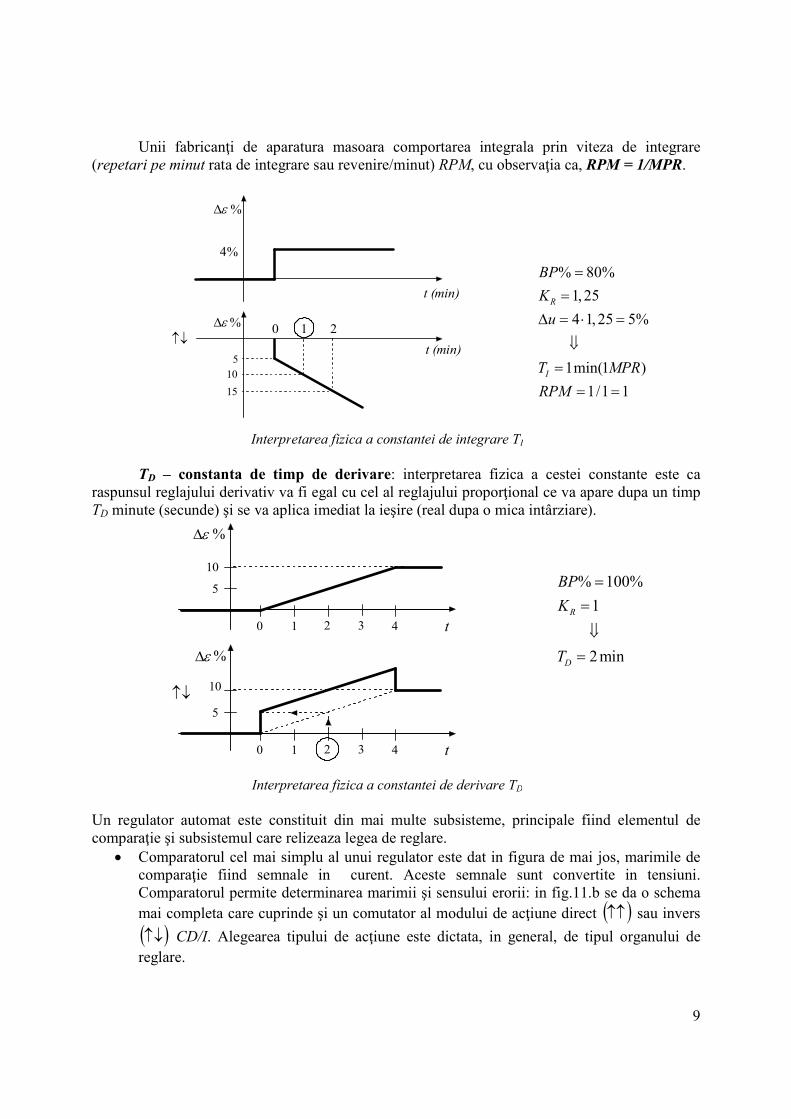
Unii fabricanţi de aparatura masoara comportarea integrala prin viteza de integrare
(repetari pe minut rata de integrare sau revenire/minut) RPM, cu observaţia ca, RPM = 1/MPR.
t (min)
4%
t (min)↑↓
0 21
5
10
15
%ε∆
%ε∆
% 80%
1, 25
4 1, 25 5%
1min(1 )
1/1 1
R
I
BP
K
u
T MPR
RPM
=
=
∆ = ⋅ =
⇓
=
= =
Interpretarea fizica a constantei de integrare TI
TD – constanta de timp de derivare: interpretarea fizica a cestei constante este ca
raspunsul reglajului derivativ va fi egal cu cel al reglajului proporţional ce va apare dupa un timp
TD minute (secunde) şi se va aplica imediat la ieşire (real dupa o mica intârziare).
↑↓
t
%ε∆
0 1 2 3 4
5
10
t0 1 2 3 4
5
10
%ε∆
% 100%
1
2 min
R
D
BP
K
T
=
=
⇓
=
Interpretarea fizica a constantei de derivare TD
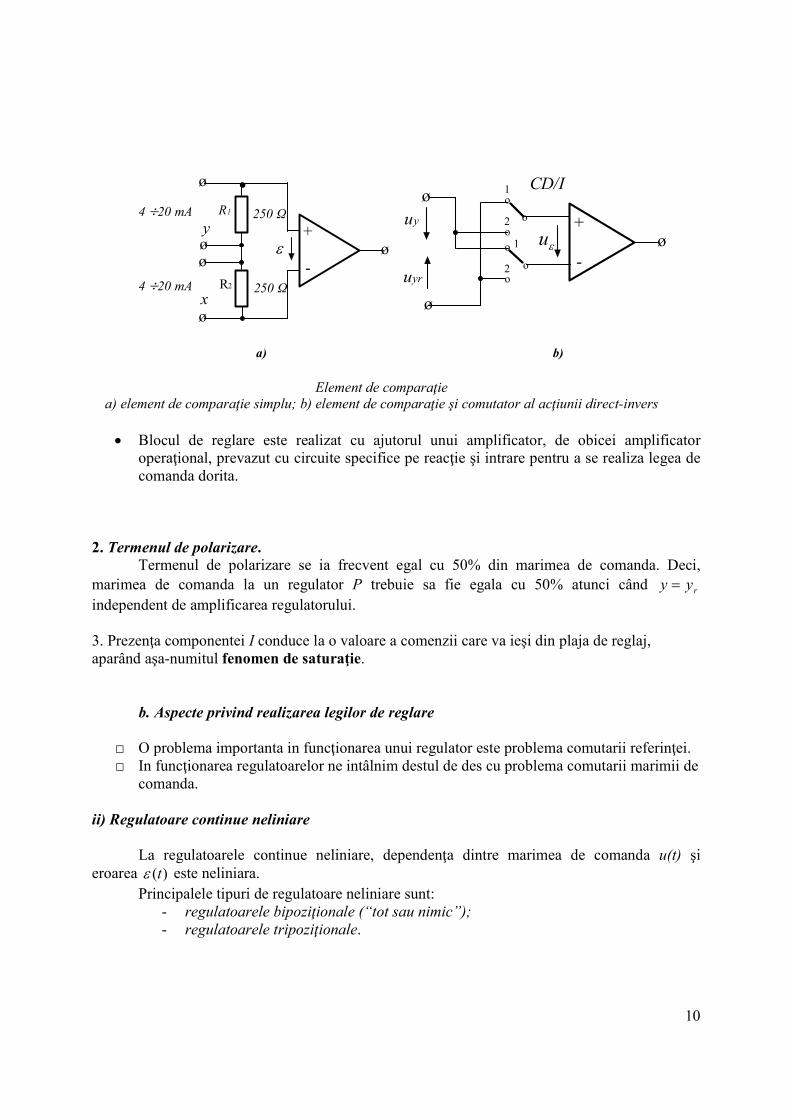
Un regulator automat este constituit din mai multe subsisteme, principale fiind elementul de
comparaţie şi subsistemul care relizeaza legea de reglare.
• Comparatorul cel mai simplu al unui regulator este dat in figura de mai jos, marimile de
comparaţie fiind semnale in curent. Aceste semnale sunt convertite in tensiuni.
Comparatorul permite determinarea marimii şi sensului erorii: in fig.11.b se da o schema
mai completa care cuprinde şi un comutator al modului de acţiune direct ( )↑↑ sau invers
( )↑↓ CD/I. Alegearea tipului de acţiune este dictata, in general, de tipul organului de
reglare.
10
.
+
-
ø
øø ø
250 ΩR1
250 ΩR2
ø
4 ÷20 mA
4 ÷20 mA
ε
x
y
+
-
ø
ø
ø
uyr
uy
o
o
o
1
2
o
o
o
1
2
CD/I
uε
a) b)
Element de comparaţie
a) element de comparaţie simplu; b) element de comparaţie şi comutator al acţiunii direct-invers
• Blocul de reglare este realizat cu ajutorul unui amplificator, de obicei amplificator
operaţional, prevazut cu circuite specifice pe reacţie şi intrare pentru a se realiza legea de
comanda dorita.
2. Termenul de polarizare.
Termenul de polarizare se ia frecvent egal cu 50% din marimea de comanda. Deci,
marimea de comanda la un regulator P trebuie sa fie egala cu 50% atunci când ryy =
independent de amplificarea regulatorului.
3. Prezenţa componentei I conduce la o valoare a comenzii care va ieşi din plaja de reglaj,
aparând aşa-numitul fenomen de saturaţie.
b. Aspecte privind realizarea legilor de reglare
O problema importanta in funcţionarea unui regulator este problema comutarii referinţei.
In funcţionarea regulatoarelor ne intâlnim destul de des cu problema comutarii marimii de
comanda.
ii) Regulatoare continue neliniare
La regulatoarele continue neliniare, dependenţa dintre marimea de comanda u(t) şi
eroarea ( )tε este neliniara.
Principalele tipuri de regulatoare neliniare sunt:
- regulatoarele bipoziţionale (“tot sau nimic”);
- regulatoarele tripoziţionale.
11
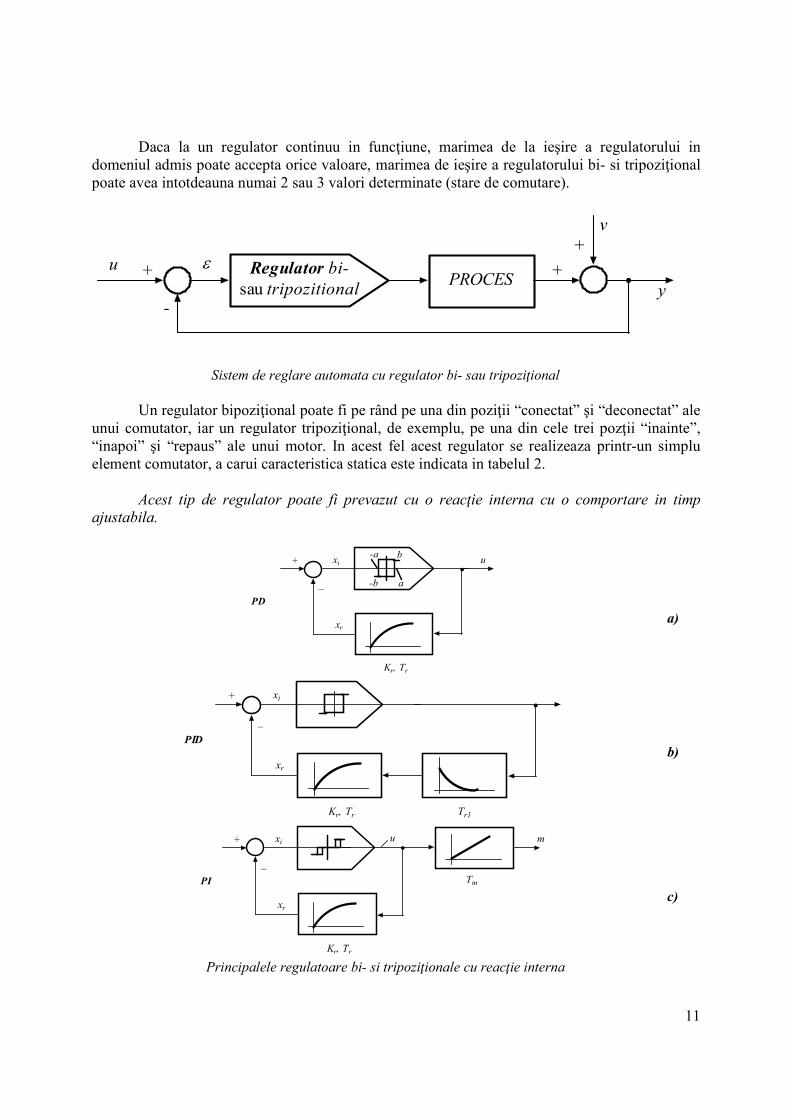
Daca la un regulator continuu in funcţiune, marimea de la ieşire a regulatorului in
domeniul admis poate accepta orice valoare, marimea de ieşire a regulatorului bi- si tripoziţional
poate avea intotdeauna numai 2 sau 3 valori determinate (stare de comutare).
u +
-
ε
y
v
+
+
Regulator bi-
sau tripozitionalPROCES
Sistem de reglare automata cu regulator bi- sau tripoziţional
Un regulator bipoziţional poate fi pe rând pe una din poziţii “conectat” şi “deconectat” ale
unui comutator, iar un regulator tripoziţional, de exemplu, pe una din cele trei pozţii “inainte”,
“inapoi” şi “repaus” ale unui motor. In acest fel acest regulator se realizeaza printr-un simplu
element comutator, a carui caracteristica statica este indicata in tabelul 2.
Acest tip de regulator poate fi prevazut cu o reacţie interna cu o comportare in timp ajustabila.
-a
a
b
-b
xi
Kr, Tr
xr
_
+ u
PD
•
a)
xi
Kr, Tr
xr
_
+
PID
Tr1
•
b)
xi
Kr, Tr
xr
_
+
PI Tm
mu•
c)
Principalele regulatoare bi- si tripoziţionale cu reacţie interna
12
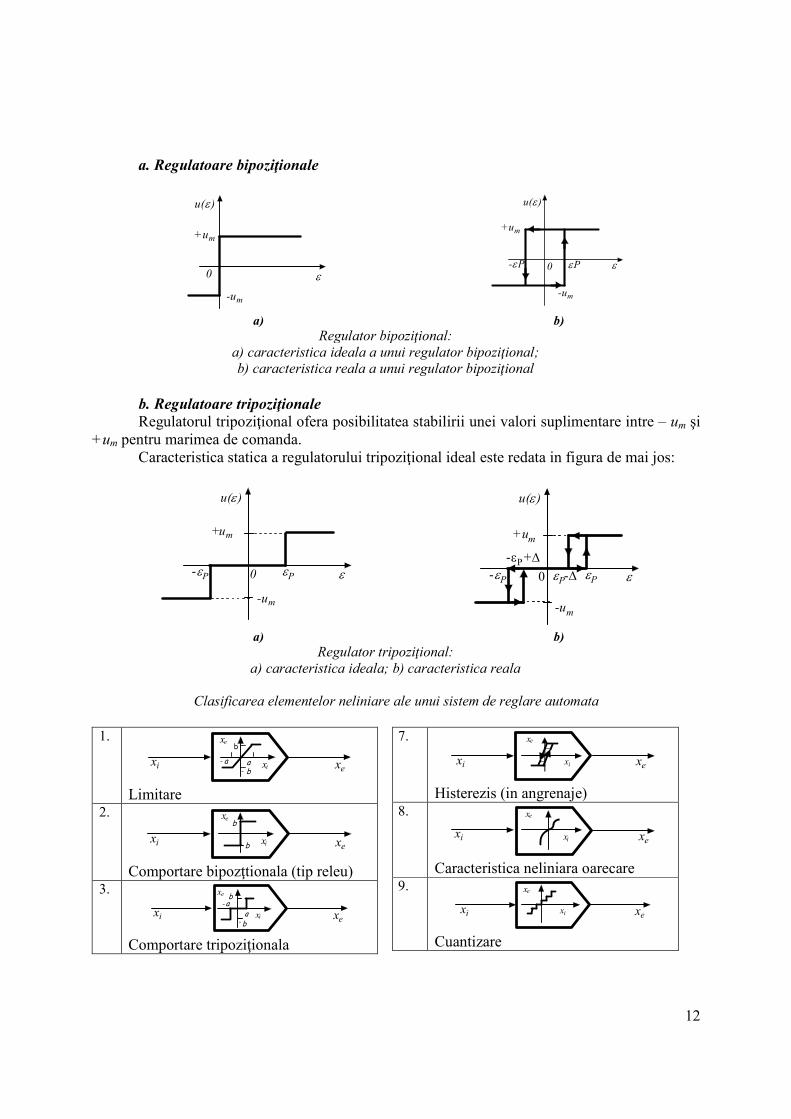
a. Regulatoare bipoziţionale
ε
u(ε)
+um
-um
0
ε
u(ε )
+um
-um
0-εP εP
a) b)
Regulator bipoziţional:
a) caracteristica ideala a unui regulator bipoziţional;
b) caracteristica reala a unui regulator bipoziţional
b. Regulatoare tripoziţionale
Regulatorul tripoziţional ofera posibilitatea stabilirii unei valori suplimentare intre – um şi
+um pentru marimea de comanda.
Caracteristica statica a regulatorului tripoziţional ideal este redata in figura de mai jos:
ε
u(ε )
+um
-um
0-εP εP
ε
u(ε )
+um
-um
0-εP εP
-εP +∆εP-∆
a) b)
Regulator tripoziţional:
a) caracteristica ideala; b) caracteristica reala
Clasificarea elementelor neliniare ale unui sistem de reglare automata
1.
- a a- b
b
xi
xe
xi xe
Limitare
2.
- b
b
xi
xe
xexi
Comportare bipozţtionala (tip releu)
3. -a
a-b
b
xi
xe
xi xe
Comportare tripoziţionala
7.
xi
xe
xi xe
Histerezis (in angrenaje)
8.
xi
xe
xi xe
Caracteristica neliniara oarecare
9.
xi
xe
xexi
Cuantizare
13
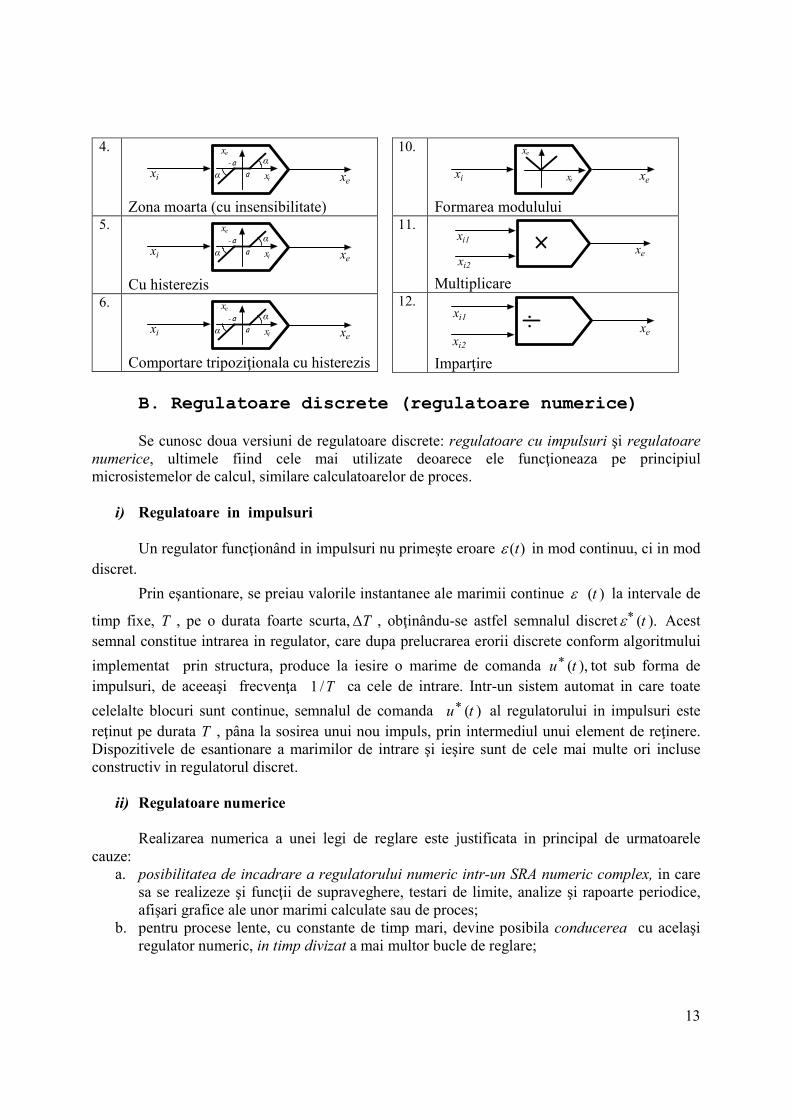
4. -a
a xi
xe
α
αxi xe
Zona moarta (cu insensibilitate)
5. -a
a xi
xe
α
αxi xe
Cu histerezis
6. -a
a xi
xe
α
αxi xe
Comportare tripoziţionala cu histerezis
10.
xi
xe
xi xe
Formarea modulului
11.
xe
xi1
xi2 Multiplicare
12.
••
xe
xi1
xi2 Imparţire
B. Regulatoare discrete (regulatoare numerice)
Se cunosc doua versiuni de regulatoare discrete: regulatoare cu impulsuri şi regulatoare
numerice, ultimele fiind cele mai utilizate deoarece ele funcţioneaza pe principiul
microsistemelor de calcul, similare calculatoarelor de proces.
i) Regulatoare in impulsuri
Un regulator funcţionând in impulsuri nu primeşte eroare )(tε in mod continuu, ci in mod
discret.
Prin eşantionare, se preiau valorile instantanee ale marimii continue ε ( )t la intervale de
timp fixe, T , pe o durata foarte scurta,∆T , obţinându-se astfel semnalul discret ε∗ ( ).t Acest
semnal constitue intrarea in regulator, care dupa prelucrarea erorii discrete conform algoritmului
implementat prin structura, produce la iesire o marime de comanda u t∗ ( ), tot sub forma de
impulsuri, de aceeaşi frecvenţa 1 /T ca cele de intrare. Intr-un sistem automat in care toate
celelalte blocuri sunt continue, semnalul de comanda u t∗ ( ) al regulatorului in impulsuri este
reţinut pe durata T , pâna la sosirea unui nou impuls, prin intermediul unui element de reţinere.
Dispozitivele de esantionare a marimilor de intrare şi ieşire sunt de cele mai multe ori incluse
constructiv in regulatorul discret.
ii) Regulatoare numerice
Realizarea numerica a unei legi de reglare este justificata in principal de urmatoarele
cauze:
a. posibilitatea de incadrare a regulatorului numeric intr-un SRA numeric complex, in care
sa se realizeze şi funcţii de supraveghere, testari de limite, analize şi rapoarte periodice,
afişari grafice ale unor marimi calculate sau de proces;
b. pentru procese lente, cu constante de timp mari, devine posibila conducerea cu acelaşi
regulator numeric, in timp divizat a mai multor bucle de reglare;

14
c. posibilitatea de integrare a regulatorului numeric intr-un sistem ierarhizat, condus prin
calculator;
d. posibilitatea modularizarii prin program (software) a structurilor de reglare (P,PI,PID,
neliniare) şi a configurarii simple, prin cuplarea rutinelor menţionate, a unor structuri de
reglare in cascada, de raport, multipla, s.a.
e. posibilitatea implementarii unor algoritmi de reglare evoluaţi (ex: conducerea dupa
stare).
Marimile cu care opereaza un regulator numeric sunt marimi eşantionate in durata şi eşantionate in amplitudine:
• Eşantionarea in durata: se preiau valorile marimilor la momente discrete de timp. Condiţia este ca frecventa de eşantionare sa fie de cel puţin de doua ori mai mare ca
frecventa maxima continuta in semnalul analogic pentru a nu apare pierdere de informaţie utila.
Practic aceasta frecventa se ia de 8 – 10 ori mai mare decât frecvenţa proprie a procesului condus.
• Eşantionarea in amplitudine consta in inlocuirea mulţimii continue a valorilor semnalului cu o mulţime discreta, finita de valori.
Algoritmii de reglare se pot prezenta in doua forme: algoritmi de poziţie şi de viteza. Pentru o lege de comanda PID avem urmatoarele expresii:
- algoritmul de poziţie (absolut)
0
0
)1()()()()( u
T
nnTj
T
TnKnu
n
j
D
I
R +
−−++= ∑
=
εεεε
- algoritmul de viteza (incremental)
[ ]
−+−−++−−=
=−−=∆
)2()1(2)()()1()(
)1()()(
nnnT
Tn
T
TnnK
nununu
D
I
R εεεεεε
cu T – perioada de esantionare;
)()();()( nTununTn == εε
ou - valoarea initiala a comenzii (polarizare);
RK - factorul de amplificare;
DT - constanta de derivare;
IT - constanta de integrare.
Pe linga numeroasele şi evidentele avantaje, reglajul numeric are şi o serie de dezavantaje,
cum ar fi:
- sensibilitate la zgomot, ceea ce impune o filtrare numerica sau analogica;
- introduce timp mort datorita procesului de eşantionare, fapt ce se poate evita prin marirea
frecvenţei de eşantionare;
- eroarea de discretizare, in special evidenţa la acţiunea derivativa: se cauta sa fie evitate
astfel de componente in legea de comanda.
15
Observatii:
1. In general, modelul discret a unui sistem se poate obţine printr-o procedura de discretizare
a funcţiei continue (exemplu: metoda dreptunghiului, metoda trapezelor, metoda Runge-
Kutta, etc.) sau direct din transformata Laplace sau cu ajutorul transformatei z.
2. Prin semnal numeric (in cadrul acestei lucrari) vom inţelege semnalele cuantizate in
valoare (amplitudine) in cuante echidistante şi eşantionate in timp.
3. Vom prezenta câteva aspecte legate de reglarea numerica:
Rezoluţia ieşirii din CA3 depinde de lungimea cuvântului in biţi. Intrucât fiecare bit
poate avea valoarea 0 sau 1 şi n biţi pot genera 2n stari. De exmplu un CA3 poate
genera 1 bit ce ne poate indica daca o temperatura se afla in jumatatea de jos a
domeniului (valoarea 0) sau in cea de sus (valoarea 1): rezoluţia va fi 0,5 sau 50%.
In practica ieşirea lui CA3 este pe 11 sau 12 biţi cu rezoluţia 0,05% (1/2048) sau 0,0025%
(1/4096).
Algoritmul de reglare numeric convenţional PID se foloseşte in special, in forma
algoritmului de viteza
)2()1()()( 321 −+−+=∆ nanananu εεε
unde a1, a2, a3 sunt constante ce depind de T, TI, TD, K. Aceasta forma necesita opt locaţii
de memorie (valoarea polarizarii, deci a valorii de regim staţionar poate fi atribuita ca valoare
iniţiala) şi efectuarea a şapte operaţii.
Semnalul inainte de a fi introdus in sistemul numeric de conducere trebuie sa fie filtrat
analogic şi/sau numeric.
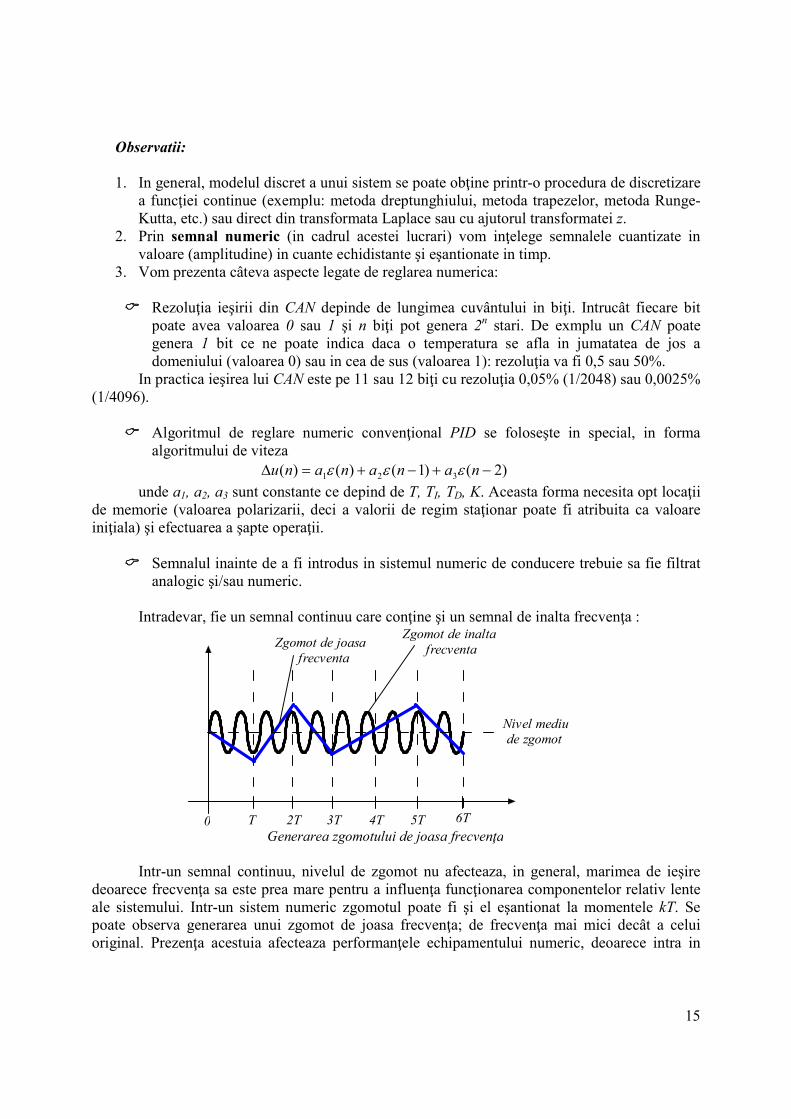
Intradevar, fie un semnal continuu care conţine şi un semnal de inalta frecvenţa :
0 T 3T 4T 5T2T 6T
Zgomot de joasa
frecventa
Zgomot de inalta
frecventa
3ivel mediu
de zgomot
Generarea zgomotului de joasa frecvenţa
Intr-un semnal continuu, nivelul de zgomot nu afecteaza, in general, marimea de ieşire
deoarece frecvenţa sa este prea mare pentru a influenţa funcţionarea componentelor relativ lente
ale sistemului. Intr-un sistem numeric zgomotul poate fi şi el eşantionat la momentele kT. Se
poate observa generarea unui zgomot de joasa frecvenţa; de frecvenţa mai mici decât a celui
original. Prezenţa acestuia afecteaza performanţele echipamentului numeric, deoarece intra in
16
domeniul frecvenţei de eşantionare şi deci in spectrul de frecvenţa al raspunsului procesului.
Acest efect este cunoscut sub numele de eroare de reprezentare.
Se impune deci filtrarea semnalului inainte de eşantionare.
Cea mai simpla forma a unui filtru numeric poate fi descrisa prin relaţia:
)()1()1()( nyqnyqny ff ⋅−+−⋅=
unde
)(ny f - marimea filtrata la a n-a eşantionare;
)(ny - marimea de la intrarea filtrului (inclusiv zgomotul) la a n-a eşantionare;
10 ≤≤ q - parametrul filtrului.
Se observa, ca la q = 0, nu evem filtrare, iar la q = 1 marimea masurata este ignorata. O
valoare curenta este q = 0,15.
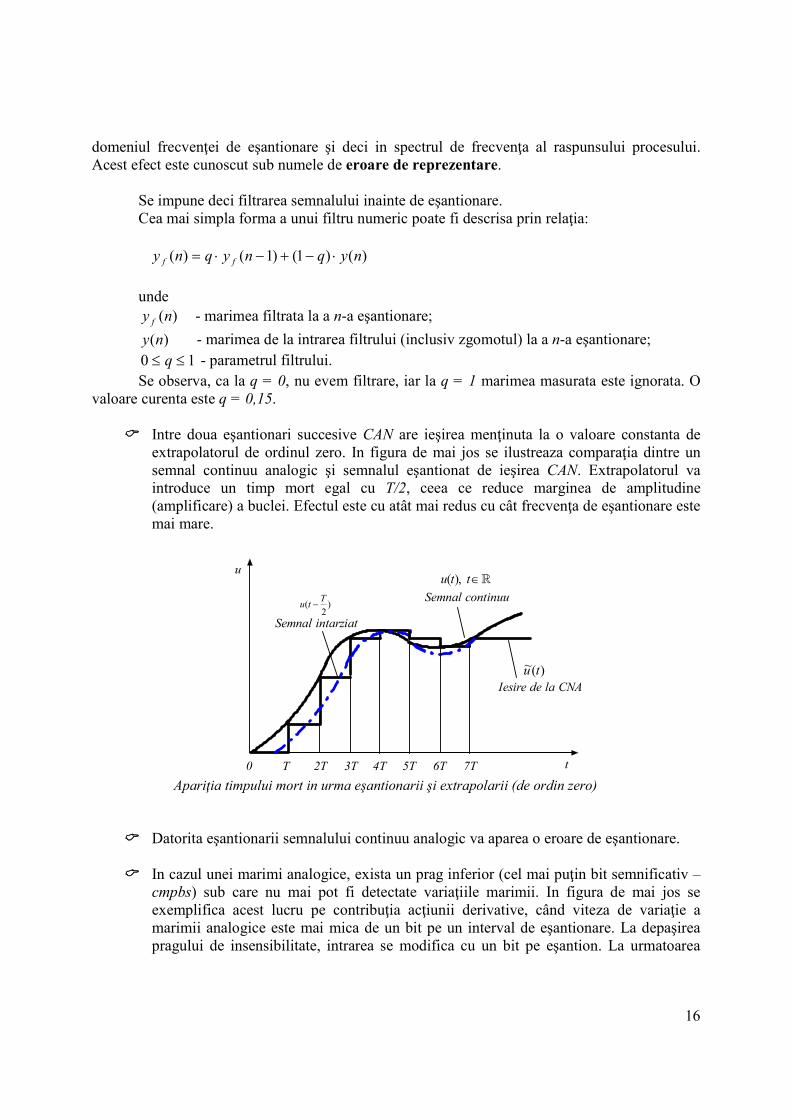
Intre doua eşantionari succesive CA3 are ieşirea menţinuta la o valoare constanta de
extrapolatorul de ordinul zero. In figura de mai jos se ilustreaza comparaţia dintre un
semnal continuu analogic şi semnalul eşantionat de ieşirea CA3. Extrapolatorul va
introduce un timp mort egal cu T/2, ceea ce reduce marginea de amplitudine
(amplificare) a buclei. Efectul este cu atât mai redus cu cât frecvenţa de eşantionare este
mai mare.
0 T 2T 7T6T5T4T3T
Iesire de la C3A
( ),u t t∈ℝSemnal continuu
Semnal intarziat
)2
(T
tu −
)(~ tu
u
t
Apariţia timpului mort in urma eşantionarii şi extrapolarii (de ordin zero)
Datorita eşantionarii semnalului continuu analogic va aparea o eroare de eşantionare.
In cazul unei marimi analogice, exista un prag inferior (cel mai puţin bit semnificativ –
cmpbs) sub care nu mai pot fi detectate variaţiile marimii. In figura de mai jos se
exemplifica acest lucru pe contribuţia acţiunii derivative, când viteza de variaţie a
marimii analogice este mai mica de un bit pe un interval de eşantionare. La depaşirea
pragului de insensibilitate, intrarea se modifica cu un bit pe eşantion. La urmatoarea
17
eşantionare, derivata este din nou zero, deoarece variabila continua s-a modificat cu o
cantitate sub pragul de insensibilitate.
Din acest exemplu rezulta şi faptul ca, acţiunea derivativa se foloseşte rar deoarece
produce pulsaţii nedorite la vanele de reglaj.
T
Iesire derivativa
Marime analogica
Eroare de discretizare
Revenind la cele doua forme ale unui algoritm de reglare numeric, de poziţie şi de
viteza, remarcam ca al doilea prezinta avantajul ca nu necesita iniţializari ca primul pe
de o parte, iar pe de alta parte permite comutari AUTOMAT-MA3UAL fara şocuri la
elementul de execuţie. Algoritmul incremental se foloseşte cu elemente de execuţie de
tip integrator.
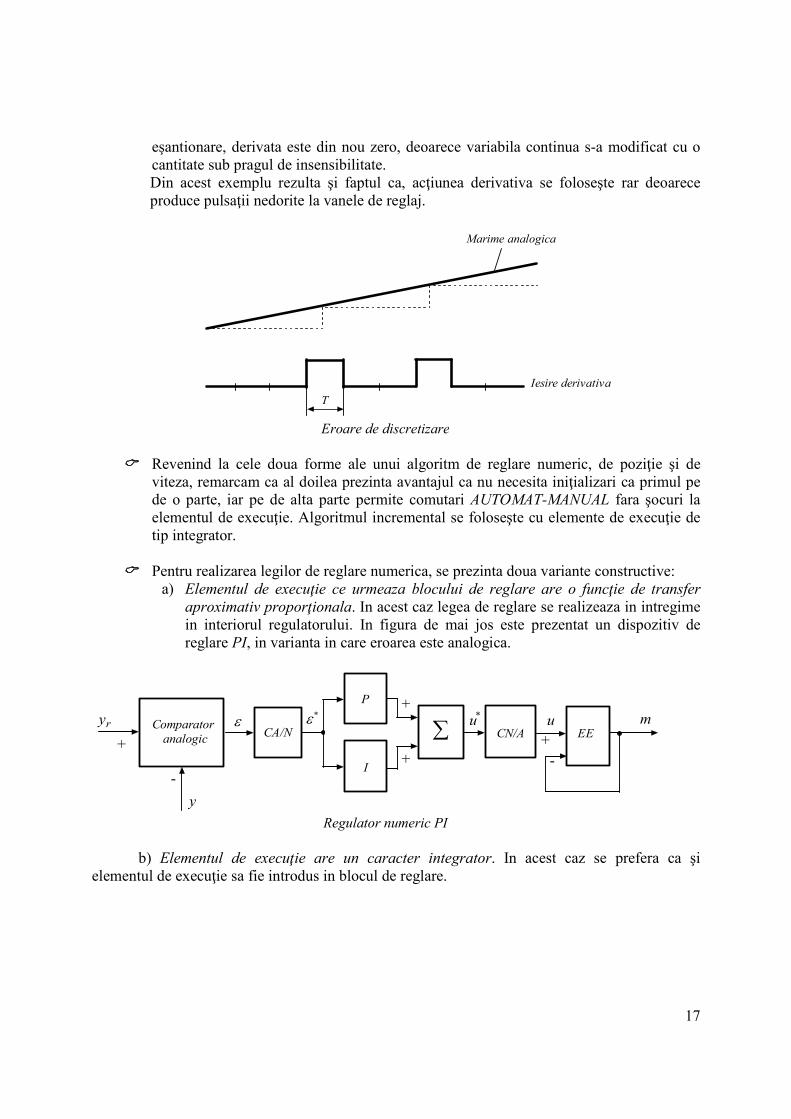
Pentru realizarea legilor de reglare numerica, se prezinta doua variante constructive:
a) Elementul de execuţie ce urmeaza blocului de reglare are o funcţie de transfer
aproximativ proporţionala. In acest caz legea de reglare se realizeaza in intregime
in interiorul regulatorului. In figura de mai jos este prezentat un dispozitiv de
reglare PI, in varianta in care eroarea este analogica.
y
-
+∑
+
+
u m
+
-
εyr*ε u*
Comparator
analogicCA/3
P
I
C3/A EE
Regulator numeric PI
b) Elementul de execuţie are un caracter integrator. In acest caz se prefera ca şi
elementul de execuţie sa fie introdus in blocul de reglare.
18
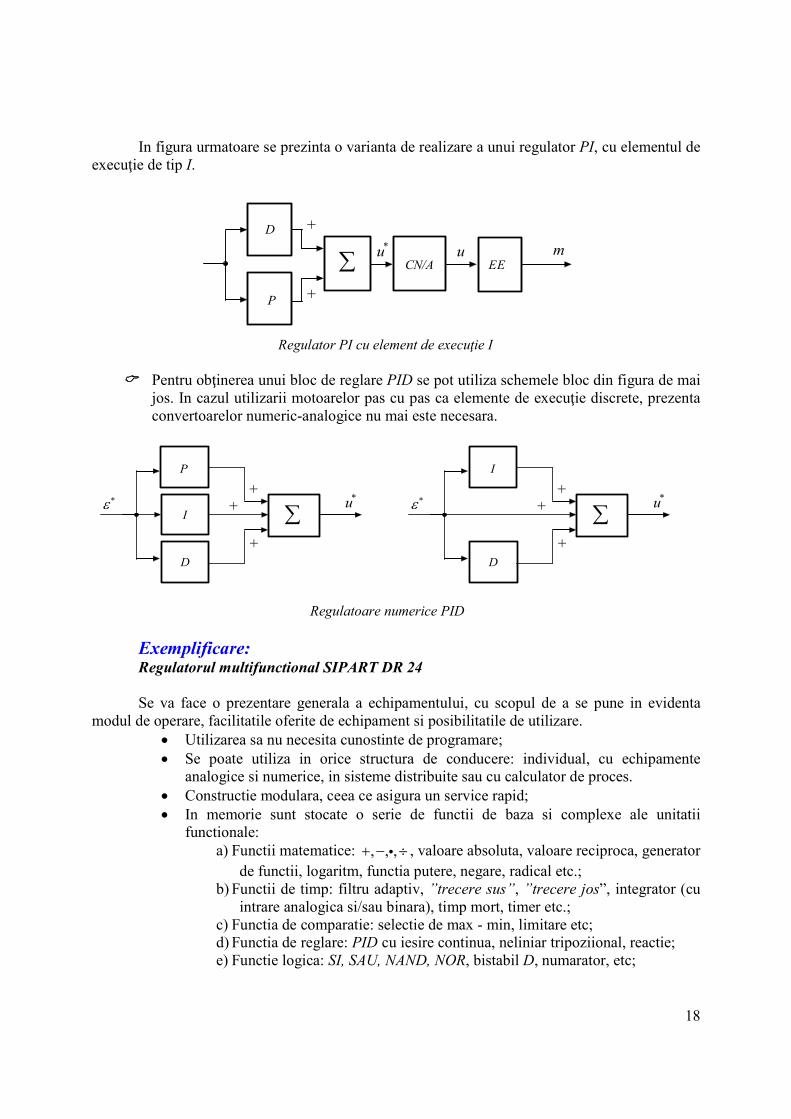
In figura urmatoare se prezinta o varianta de realizare a unui regulator PI, cu elementul de
execuţie de tip I.
∑
+
+
u mu*
D
P
C3/A EE
Regulator PI cu element de execuţie I
Pentru obţinerea unui bloc de reglare PID se pot utiliza schemele bloc din figura de mai
jos. In cazul utilizarii motoarelor pas cu pas ca elemente de execuţie discrete, prezenta
convertoarelor numeric-analogice nu mai este necesara.
I ∑+
+
D
*ε
+
u*
P
∑+
+
D
*ε
+
u*
I
Regulatoare numerice PID
Exemplificare: Regulatorul multifunctional SIPART DR 24
Se va face o prezentare generala a echipamentului, cu scopul de a se pune in evidenta
modul de operare, facilitatile oferite de echipament si posibilitatile de utilizare.
• Utilizarea sa nu necesita cunostinte de programare;
• Se poate utiliza in orice structura de conducere: individual, cu echipamente
analogice si numerice, in sisteme distribuite sau cu calculator de proces.
• Constructie modulara, ceea ce asigura un service rapid;
• In memorie sunt stocate o serie de functii de baza si complexe ale unitatii
functionale:
a) Functii matematice: , , ,+ − ÷i , valoare absoluta, valoare reciproca, generator
de functii, logaritm, functia putere, negare, radical etc.;
b) Functii de timp: filtru adaptiv, ”trecere sus”, ”trecere jos”, integrator (cu
intrare analogica si/sau binara), timp mort, timer etc.;
c) Functia de comparatie: selectie de max - min, limitare etc;
d) Functia de reglare: PID cu iesire continua, neliniar tripoziional, reactie;
e) Functie logica: SI, SAU, 3A3D, 3OR, bistabil D, numarator, etc;
19
f) Comutator: de marimi binare si analogice, multiplexor
g) Functii de memorare: analog, Max, Min, integrator, etc;
h) Generator programabil.
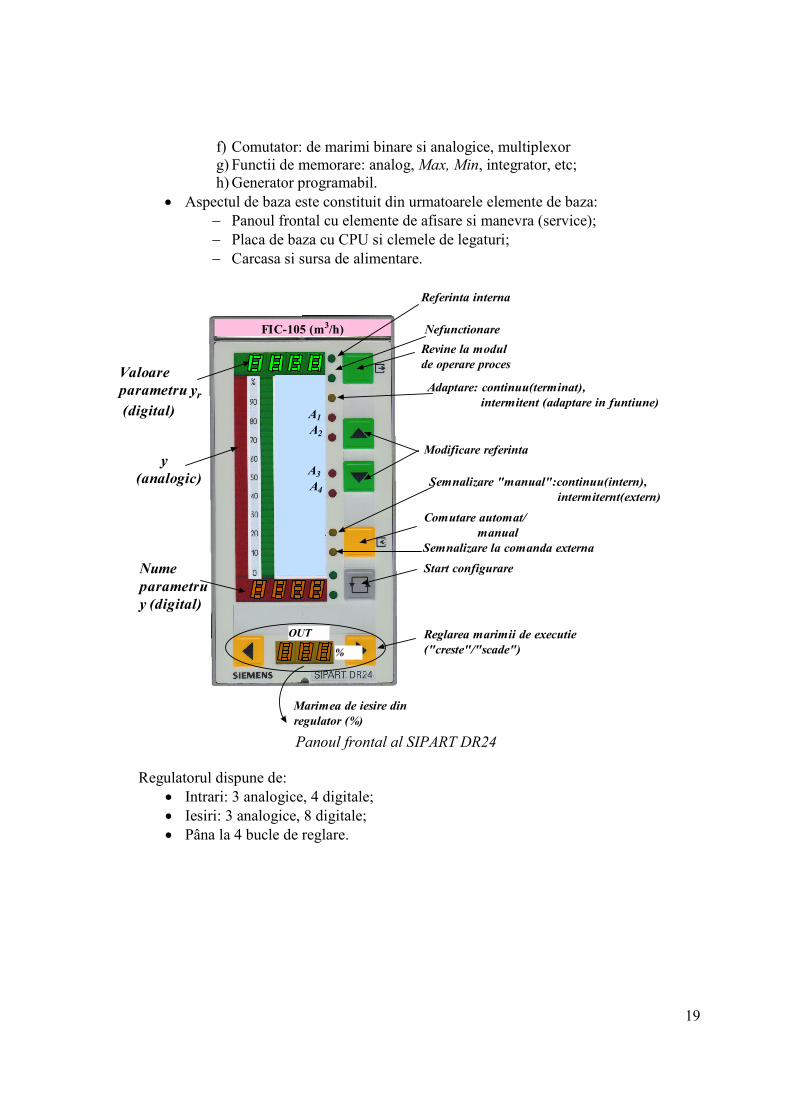
• Aspectul de baza este constituit din urmatoarele elemente de baza:
− Panoul frontal cu elemente de afisare si manevra (service);
− Placa de baza cu CPU si clemele de legaturi;
− Carcasa si sursa de alimentare.
FIC-105 (m3/h)
Revine la modul
de operare proces
Modificare referinta
Comutare automat/
manual
Start configurare
Reglarea marimii de executie
("creste"/"scade")
ume
parametru
y (digital)
Valoare
parametru yr
(digital)
y
(analogic)
Referinta interna
efunctionare
Adaptare: continuu(terminat),
intermitent (adaptare in funtiune)
Semnalizare "manual":continuu(intern),
intermiternt(extern)
Semnalizare la comanda externa
OUT
%
Marimea de iesire din
regulator (%)
A1
A2
A3
A4
Panoul frontal al SIPART DR24
Regulatorul dispune de:
• Intrari: 3 analogice, 4 digitale;
• Iesiri: 3 analogice, 8 digitale;
• Pâna la 4 bucle de reglare.
20
Elemente de executie
1. Rolul şi locul elementului de execuŃie intr-un
SRA. Clasificari.
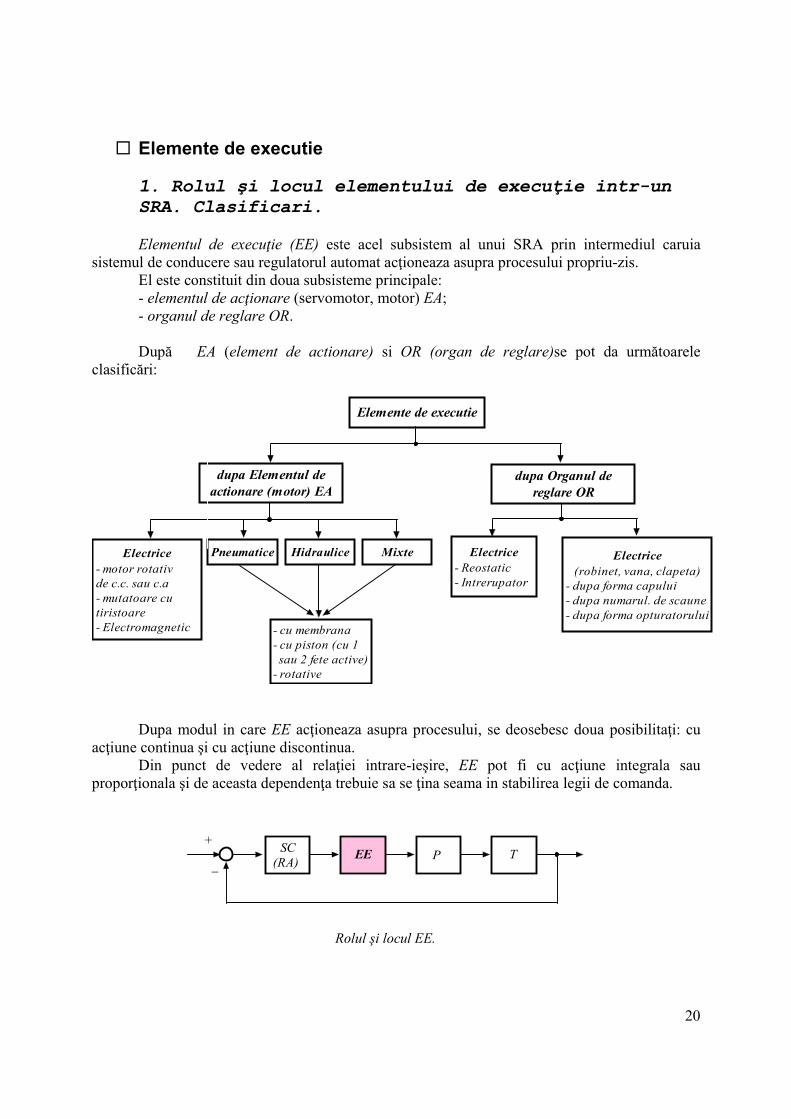
Elementul de execuţie (EE) este acel subsistem al unui SRA prin intermediul caruia
sistemul de conducere sau regulatorul automat acţioneaza asupra procesului propriu-zis.
El este constituit din doua subsisteme principale:
- elementul de acţionare (servomotor, motor) EA;
- organul de reglare OR.
După EA (element de actionare) si OR (organ de reglare)se pot da următoarele
clasificări:
Elemente de executie
dupa Elementul de
actionare (motor) EA
Electrice
- motor rotativ
de c.c. sau c.a
- mutatoare cu
tiristoare
- Electromagnetic
Pneumatice Hidraulice Electrice
- Reostatic
- Intrerupator
dupa Organul de
reglare OR
Mixte Electrice
(robinet, vana, clapeta)
- dupa forma capului
- dupa numarul. de scaune
- dupa forma opturatorului
- cu membrana
- cu piston (cu 1
sau 2 fete active)
- rotative
Dupa modul in care EE acţioneaza asupra procesului, se deosebesc doua posibilitaţi: cu
acţiune continua şi cu acţiune discontinua.
Din punct de vedere al relaţiei intrare-ieşire, EE pot fi cu acţiune integrala sau
proporţionala şi de aceasta dependenţa trebuie sa se ţina seama in stabilirea legii de comanda.
SC
(RA)EE P T
+
_
Rolul şi locul EE.
21
• Elemente caracterizante unui EE
Alegerea unui EE consta, in mod practic, in alegerea organului de reglare şi, corelat cu
acesta, a elementului de acţionare. La alegerea OR se au in vedere, in primul rând,
caracteristicile constructive legate de tipul OR (electric sau neelectric), tipul variantei
constructive (a corpului OR, numarul de scaune, forma opturatorului) şi in funcţie de
temperatura, corozivitate şi toxicitatea mediului de lucru.
EA
Element de executie (EE)
u h mElement de
actionareOrgan de reglare
OR
Subsistemele constituente ale unui element de execuţie
Dimensionarea propriu-zisa a OR se face pe baza caracteristicii intrinseci, ţinând cont de
datele iniţiale (debitul de fluid, mediul de lucru, caderea de presiune, etc). In alegerea EE trebuie
sa se ţina seama, de asemenea de asigurarea unei funcţionari sigure, de caracteristicile statice şi
dinamice, de domeniul de liniaritate, de viteza de raspuns, etc.
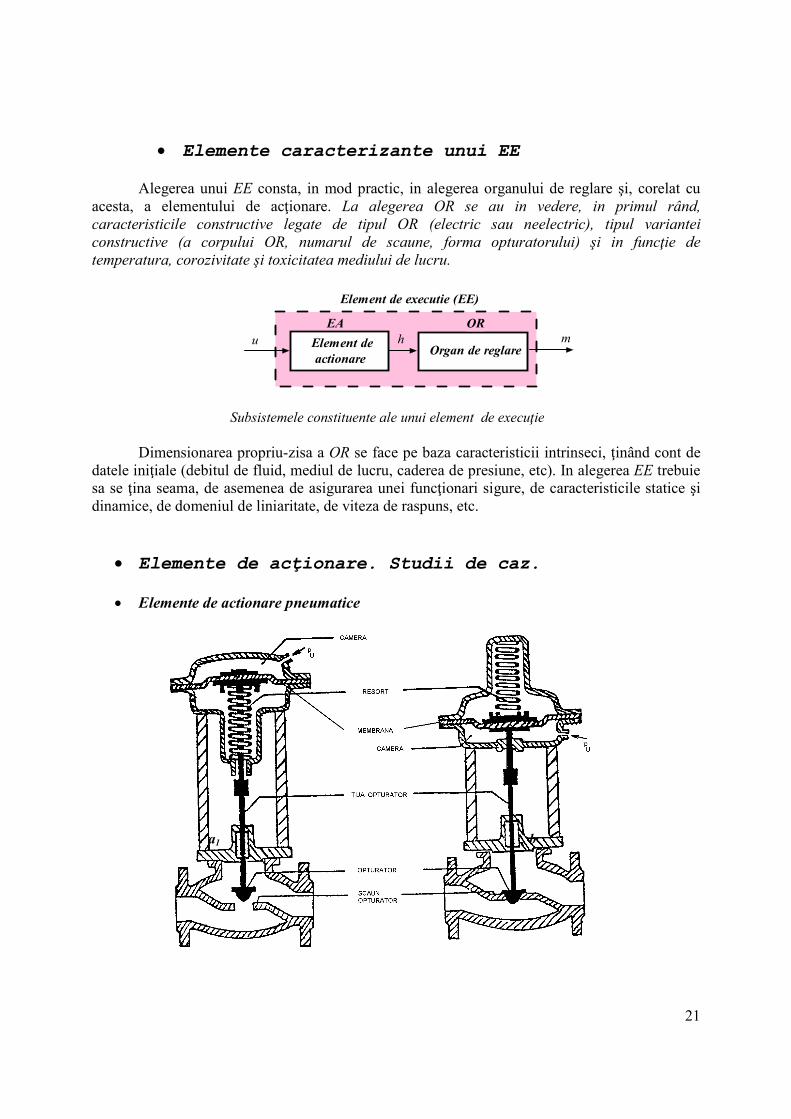
• Elemente de acŃionare. Studii de caz.
• Elemente de actionare pneumatice
b a1
22
h
t
Real
Ideal h( t )
pu(t) a2,2)
a2,1)
pu
h(t)
pu(t)
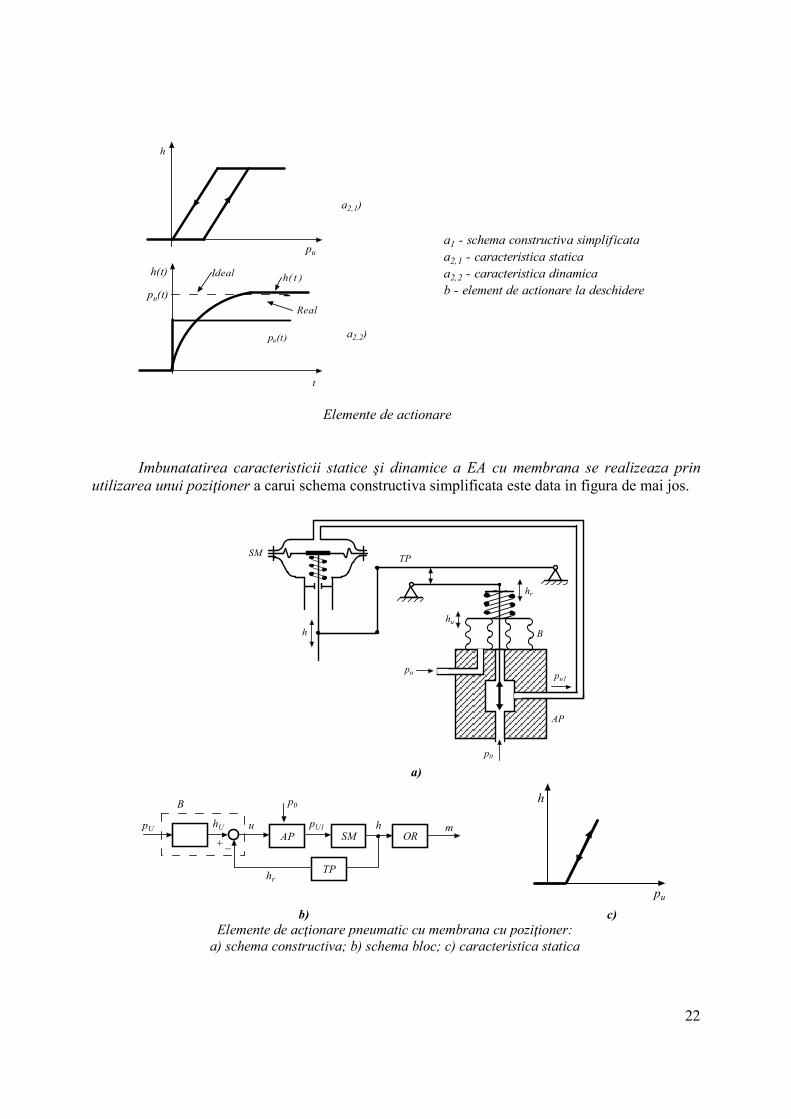
a1 - schema constructiva simplificata
a2,1 - caracteristica statica
a2,2 - caracteristica dinamica
b - element de actionare la deschidere
Elemente de actionare
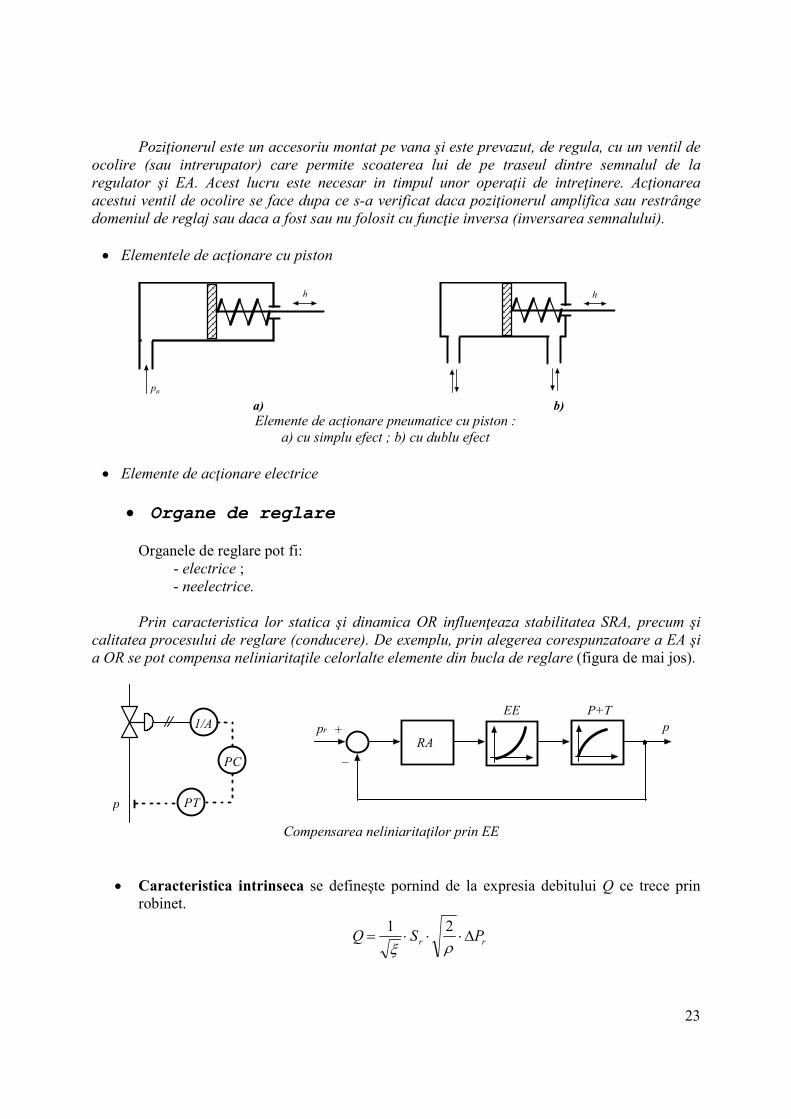
Imbunatatirea caracteristicii statice şi dinamice a EA cu membrana se realizeaza prin
utilizarea unui poziţioner a carui schema constructiva simplificata este data in figura de mai jos.
SM
h
TP
hu
pu pu1
p0
hr
B
AP
a)
+
p0
TP
pU1
AP SM ORu mh
_
pUhU
B
hr
h
pu b) c)
Elemente de acţionare pneumatic cu membrana cu poziţioner:
a) schema constructiva; b) schema bloc; c) caracteristica statica
23
Poziţionerul este un accesoriu montat pe vana şi este prevazut, de regula, cu un ventil de
ocolire (sau intrerupator) care permite scoaterea lui de pe traseul dintre semnalul de la
regulator şi EA. Acest lucru este necesar in timpul unor operaţii de intreţinere. Acţionarea
acestui ventil de ocolire se face dupa ce s-a verificat daca poziţionerul amplifica sau restrânge
domeniul de reglaj sau daca a fost sau nu folosit cu funcţie inversa (inversarea semnalului).
• Elementele de acţionare cu piston
h
pu
h
a) b)
Elemente de acţionare pneumatice cu piston :
a) cu simplu efect ; b) cu dublu efect
• Elemente de acţionare electrice
• Organe de reglare
Organele de reglare pot fi:
- electrice ;
- neelectrice.
Prin caracteristica lor statica şi dinamica OR influenţeaza stabilitatea SRA, precum şi
calitatea procesului de reglare (conducere). De exemplu, prin alegerea corespunzatoare a EA şi
a OR se pot compensa neliniaritaţile celorlalte elemente din bucla de reglare (figura de mai jos).
PC
1/A
PTp
RA
EE P+T
ppr +
_
Compensarea neliniaritaţilor prin EE
• Caracteristica intrinseca se defineşte pornind de la expresia debitului Q ce trece prin
robinet.
rr PSQ ∆⋅⋅⋅=ρξ21

24
unde:
ξ - coeficientul de pierdere (rezistenta) locala;
ρ - densitatea agentului de reglare;
Sr – secţiunea de trecere a robinetului;
rP∆ - pierderea de presiune remanenta prin frecare.
Notam cu
rv SK ⋅⋅=ξ1
2
şi obţinem
ρr
v
PKQ
∆⋅=
sau
ρr
vP
cK
∆=
Pentru un robinet de reglare, parametrul Kv se poate exprima in funcţie de cursa h a axului
acestuia
( )hKK vv =
care reprezinta caracteristica intrinseca a robinetului
Kv nu depinde de restul ansamblului, ci numai de construcţia robinetului şi se poate
exprima numeric prin debitul unui fluid de ρ = 1 kg/dm3 care trecând printr-un robinet de
reglare, determina rP∆ =1 da3/cm².
Livrarea robinetelor de reglare se face in funcţie de Kv şi acestea sunt realizate cu
caracteristici intrinseci de diverse tipuri: liniare, parabolice, logaritmice.
• Caracteristica de lucru definita prin relaţia:
( )Q Q h=
ţine cont de rezistenţa hidraulica a conductei pe care are loc o cadere de presiune ∆ Pc şi careia i
se poate asocia un parametru Kc, coeficient de debit, analog cu Kv
Q KP
cc=
∆
ρ
Factorul de amplificare al vanei este dat de panta caracteristicii. Vana liniara are 1ORk =
in timp ce caracteristica parabolica are kOR mic in vecinatatea poziţiei inchis pentru a atinge valori
mari in pozitia inchis. Vana cu inchidere rapida se comporta invers in raport cu vana parabolica.
Pentru sistemele condiţionat stabile, factorul de amplificare trebuie sa nu depaşeasca o
valoare maxima.

25
Deoarece:
RA EE P TK k k k k= ⋅ ⋅ ⋅
cu
EE EA ORk k k= ⋅
unde:
k0 - factorul de amplificare al regulatorului;
kEE - factorul de amplificare al elementului de execuţie;
kOR - factorul de amplificare al organului de reglare;
kEA - factorul de amplificare al elementului de acţionare;
kP - factorul de amplificare al procesului;
kT - factorul de amplificare al traductorului
Rezulta ca kOR trebuie sa compenseze pe kP. In caz contrar, ar trebui sa avem o ajustare
permanenta a lui k0.
Rezulta ca vana trebuie sa compenseze variaţiile amplificarii pentru un domeniu larg de
regimuri de funcţionare.Vom exemplifica modul de alegere a vanei functie de tipul procesului:
- Daca prin vana se face o tranzitare a unui debit de fluid de la un sistem cu presiune inalta
constanta la un sistem de joasa presiune, cu nivel redus de pierderi prin frecare (distincte
de cele ale vanei propriu-zise), atunci K este practic constant şi se va alege o vana cu
caracteristica liniara;
- Daca sistemul are pierderi ∆ PC mari in raport cu caderea de presiune pe vana, deci
amplificare mai mare la debite mici şi mai mici la debite mari, se alege o vana cu
caracteristica parabolica;
- Vana cu deschidere rapida se foloseşte in situaţiile unui reglaj de tip deschis/inchis, ca de
exemplu, la un sistem de avarie.
-
0.2 0.6 1
0.2
0.6
1KV
K100
h
h100
0.2 0.6 1
0.2
0.6
1
h
h100
Q
Q1001
2
3
45
a) b)
Caracteristicile statice ale organelor de reglare:
a) caracteristica intrinseca ; b) caracteristica de lucru ( 1 – ventil cu inchidere rapida ; 2 – ventil
liniar ; 3 – ventil cu bila ; 4 – ventil fluture ; 5 – ventil parabolic)
26
Sisteme de achizitie de date (DAQ)
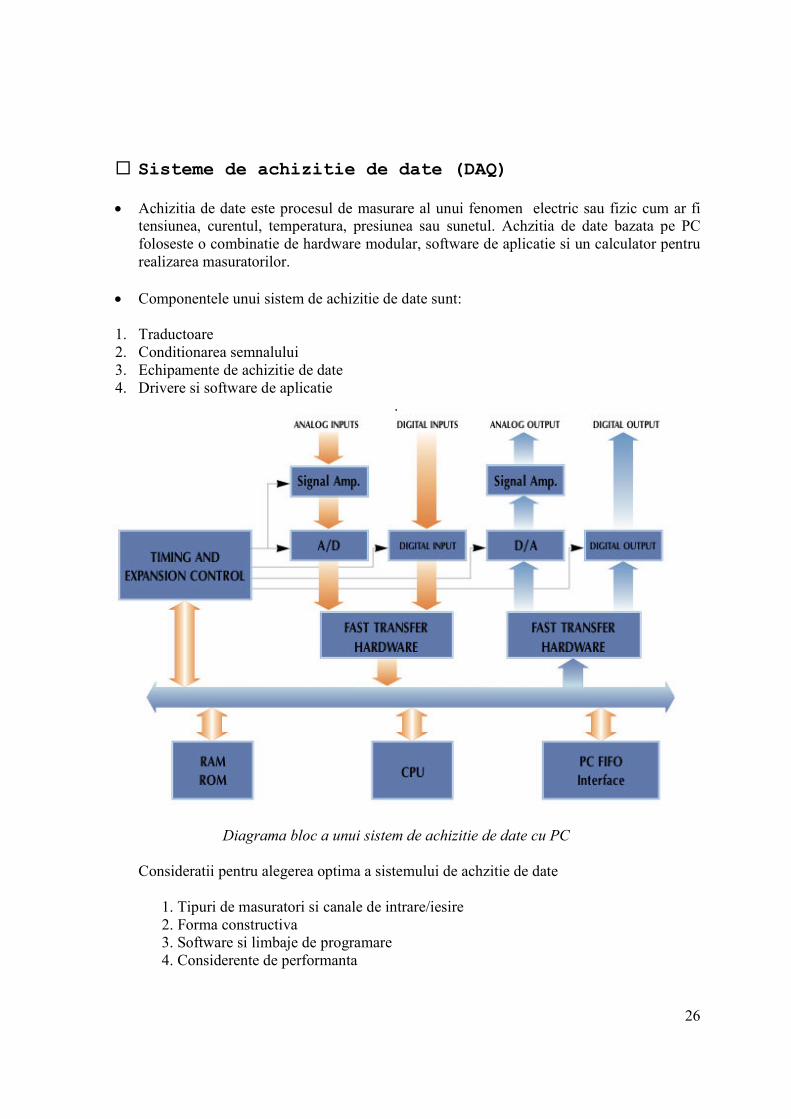
• Achizitia de date este procesul de masurare al unui fenomen electric sau fizic cum ar fi tensiunea, curentul, temperatura, presiunea sau sunetul. Achzitia de date bazata pe PC
foloseste o combinatie de hardware modular, software de aplicatie si un calculator pentru
realizarea masuratorilor.
• Componentele unui sistem de achizitie de date sunt:
1. Traductoare
2. Conditionarea semnalului
3. Echipamente de achizitie de date
4. Drivere si software de aplicatie
.
Diagrama bloc a unui sistem de achizitie de date cu PC
Consideratii pentru alegerea optima a sistemului de achzitie de date
1. Tipuri de masuratori si canale de intrare/iesire
2. Forma constructiva
3. Software si limbaje de programare
4. Considerente de performanta
27
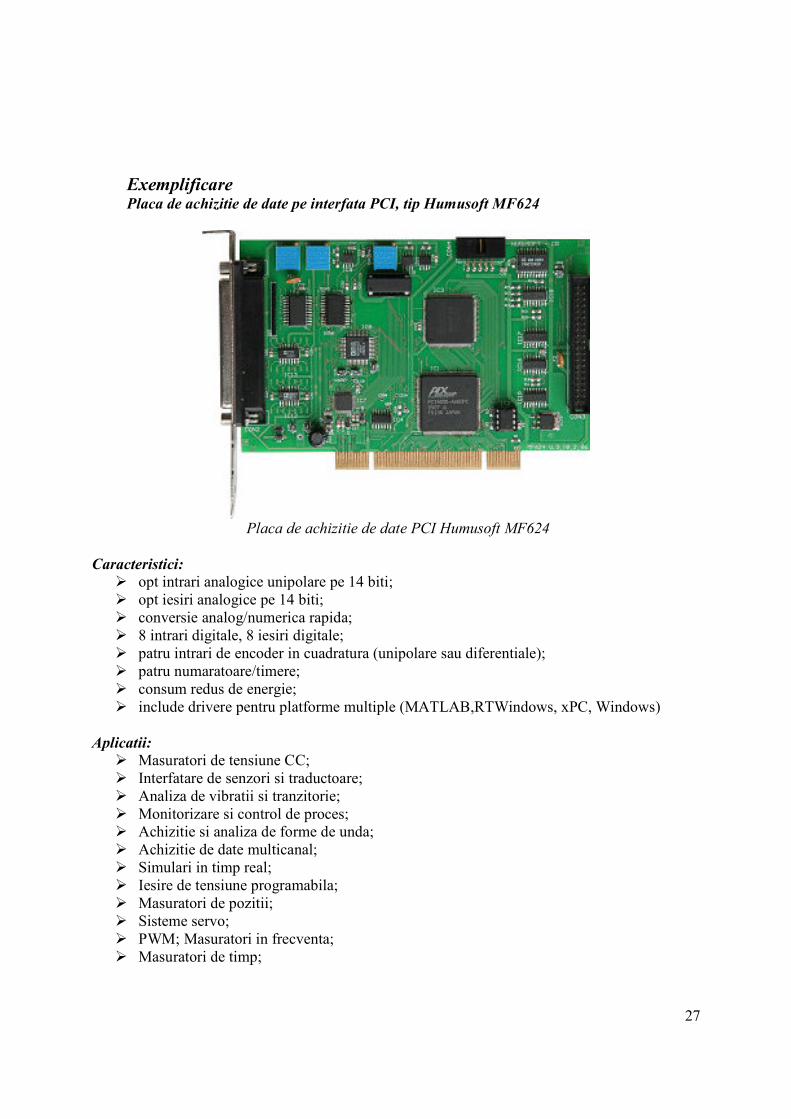
Exemplificare Placa de achizitie de date pe interfata PCI, tip Humusoft MF624
Placa de achizitie de date PCI Humusoft MF624
Caracteristici:
opt intrari analogice unipolare pe 14 biti;
opt iesiri analogice pe 14 biti;
conversie analog/numerica rapida;
8 intrari digitale, 8 iesiri digitale;
patru intrari de encoder in cuadratura (unipolare sau diferentiale);
patru numaratoare/timere;
consum redus de energie;
include drivere pentru platforme multiple (MATLAB,RTWindows, xPC, Windows)
Aplicatii:
Masuratori de tensiune CC;
Interfatare de senzori si traductoare;
Analiza de vibratii si tranzitorie;
Monitorizare si control de proces;
Achizitie si analiza de forme de unda;
Achizitie de date multicanal;
Simulari in timp real;
Iesire de tensiune programabila;
Masuratori de pozitii;
Sisteme servo;
PWM; Masuratori in frecventa;
Masuratori de timp;
28
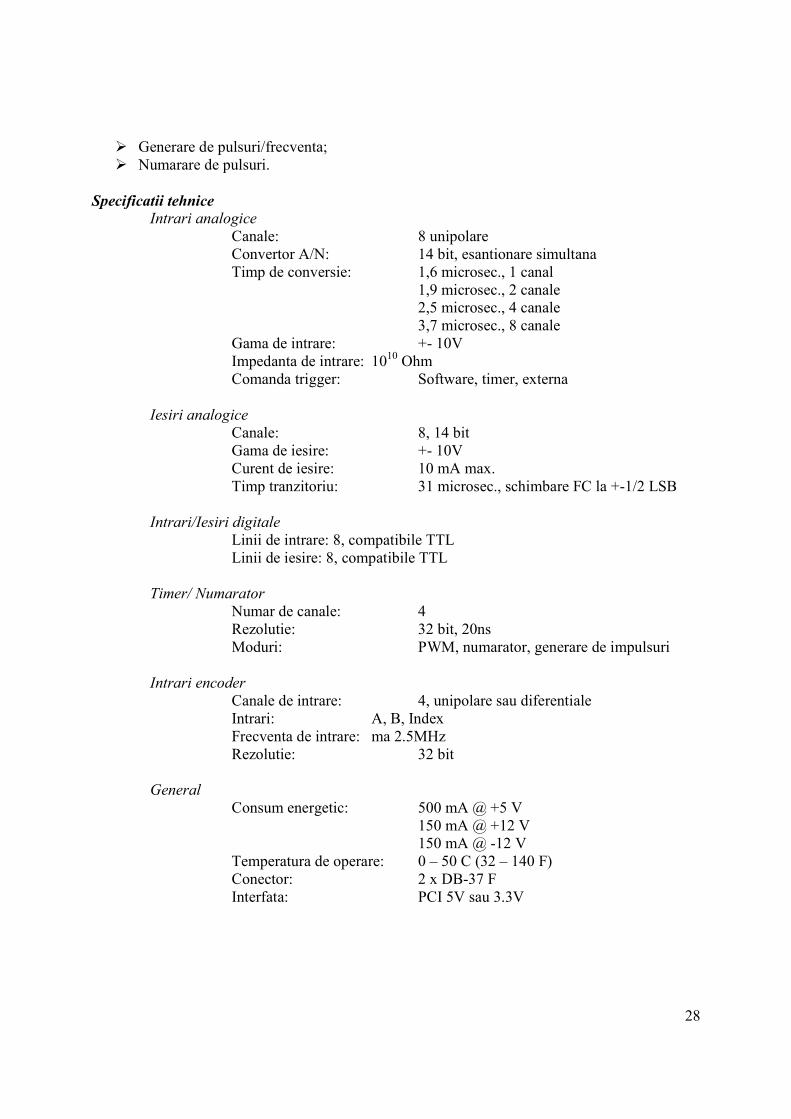
Generare de pulsuri/frecventa;
Numarare de pulsuri.
Specificatii tehnice
Intrari analogice
Canale: 8 unipolare
Convertor A/N: 14 bit, esantionare simultana
Timp de conversie: 1,6 microsec., 1 canal
1,9 microsec., 2 canale
2,5 microsec., 4 canale
3,7 microsec., 8 canale
Gama de intrare: +- 10V
Impedanta de intrare: 1010
Ohm
Comanda trigger: Software, timer, externa
Iesiri analogice
Canale: 8, 14 bit
Gama de iesire: +- 10V
Curent de iesire: 10 mA max.
Timp tranzitoriu: 31 microsec., schimbare FC la +-1/2 LSB
Intrari/Iesiri digitale
Linii de intrare: 8, compatibile TTL
Linii de iesire: 8, compatibile TTL
Timer/ 3umarator
Numar de canale: 4
Rezolutie: 32 bit, 20ns
Moduri: PWM, numarator, generare de impulsuri
Intrari encoder
Canale de intrare: 4, unipolare sau diferentiale
Intrari: A, B, Index
Frecventa de intrare: ma 2.5MHz
Rezolutie: 32 bit
General
Consum energetic: 500 mA @ +5 V
150 mA @ +12 V
150 mA @ -12 V
Temperatura de operare: 0 – 50 C (32 – 140 F)
Conector: 2 x DB-37 F
Interfata: PCI 5V sau 3.3V
29
2. Aspecte ale software-ului sistemelor informatice destinate
conducerii proceselor
Dupa cum s-a mai amintit, un calcultor devine calculator de proces, prin aceea ca, prin
intermediul elementelor de cuplare la proces (prin care se realizeaza schimbul de informatii spre/
si de la proces) si a programelor, poate sa lucreze in timp real (on real-time) cu procesul
tehnologic la care a fost cuplat.
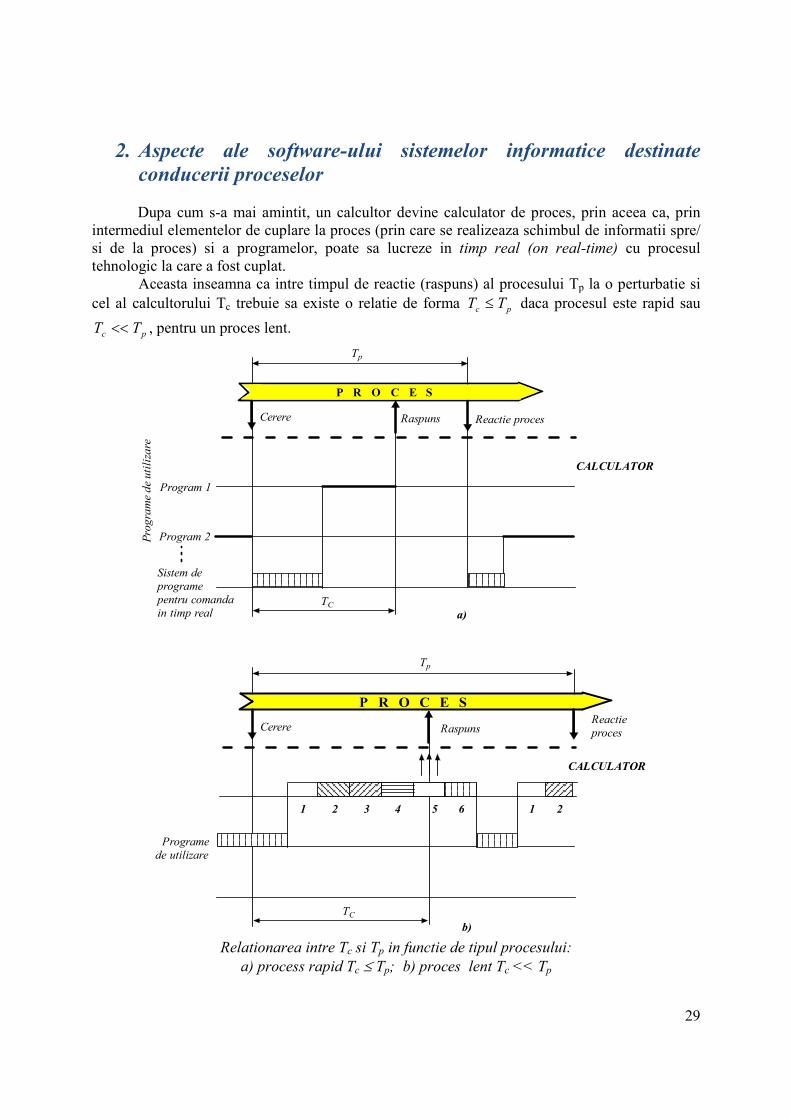
Aceasta inseamna ca intre timpul de reactie (raspuns) al procesului Tp la o perturbatie si
cel al calcultorului Tc trebuie sa existe o relatie de forma pc TT ≤ daca procesul este rapid sau
pc TT << , pentru un proces lent.
CALCULATOR
Cerere RaspunsReactie
proces
Programe
de utilizare
TC
Tp
1 2 3 4 5 6 1 2
a)
b)
CALCULATOR
Cerere Raspuns Reactie proces
Pro
gra
me
de
uti
liza
re
Program 1
Program 2
Sistem de
programe
pentru comanda
in timp realTC
Tp
P R O C E S
P R O C E S
Relationarea intre Tc si Tp in functie de tipul procesului:
a) process rapid Tc ≤ Tp; b) proces lent Tc << Tp
30
Un calculator de proces (ce functioneaza in timp real) se poate caracteriza prin coeficienti
de forma:
( )tipi
ci
i ttt
p +=1
cu
∑=
≈3
i
ip1
1
unde: tci – timpul de ciclare al prelucrarii pentru programul i;
tpi – timpul de prelucrare al programului i;
tti – timpul de transfer al programului i.
In realitate, in locul unitatii, din relatia de mai sus, se ia 0,7, deoarece se considera ca
timpul efectiv de lucru este de 70%, restul de 30% fiind rezervata intreruperilor, testarilor in
functionare, etc.
Hardware-ul are functia de a asigura suportul de implementare a software-ului. Privit din
punct de vedere al partii de software, calculatorul de proces poate fi considerat a fi organizat pe
trei nivele, asa cum se poate vedea in tabelul de mai jos.
NIVELUL 1 Translatoare, sisteme descrise in alte limbaje
decat cele ale masinii
Formule, tabele,
Scheme logice
NIVEL 2 Copilatoare, sisteme de operare Parametrii specifici
macroinstructiunilor
NIVEL 3 Asambloare, subrutine Codificare simbolica
3ivelele de organizare software in calculatoare numerice.
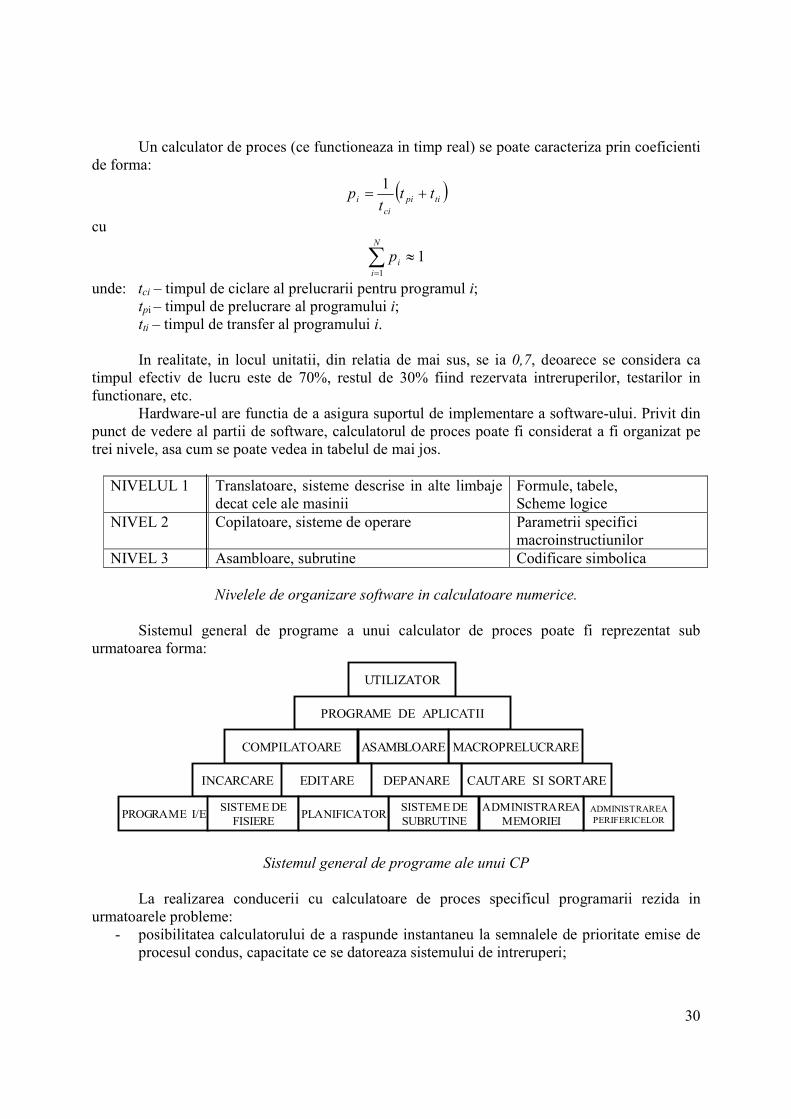
Sistemul general de programe a unui calculator de proces poate fi reprezentat sub
urmatoarea forma:
UTILIZATOR
PROGRAME DE APLICATII
MACROPRELUCRAREASAMBLOARECOMPILATOARE
CAUTARE SI SORTAREDEPANAREINCARCARE EDITARE
ADMINISTRAREA
PERIFERICELOR
ADMINISTRAREA
MEMORIEI
SISTEME DE
SUBRUTINEPROGRAME I/E
SISTEME DE
FISIEREPLANIFICATOR
Sistemul general de programe ale unui CP
La realizarea conducerii cu calculatoare de proces specificul programarii rezida in
urmatoarele probleme:
- posibilitatea calculatorului de a raspunde instantaneu la semnalele de prioritate emise de
procesul condus, capacitate ce se datoreaza sistemului de intreruperi;
31
- capacitatea sistemului de a primi date direct de la aparatajul de masura si reglare a
procesului;
- necesitatea de a se asigura o fiabilitate ridicata fluxului informational si de conducere
calculator – proces – calculator, precum si formularii corecte a restrictiilor temporale in
scopul controlului in timp real;
- cerinta ca timpul real in care calculatorul este ocupat cu o anumita operatie sa fie strict
corelata cu timpul in care se produc alte evenimente, exterioare fata de calculator;
- posibilitatea conducerii continue a procesului de catre calculator, pe de o parte si de
executie al altor algoritmi in timpul in care calculatorul nu este ocupat cu algoritmul de
conducere a procesului, pe de alta parte.
Pregatirea programelor pentru calculatorul de proces comporta principial doua etape
importante:
a) descrierea sistemului analizat si codificarea informatiei primare;
b) descrierea algoritmilor de reglare destinati conducerii procesului si efectuarea unor
calcule si operatii.
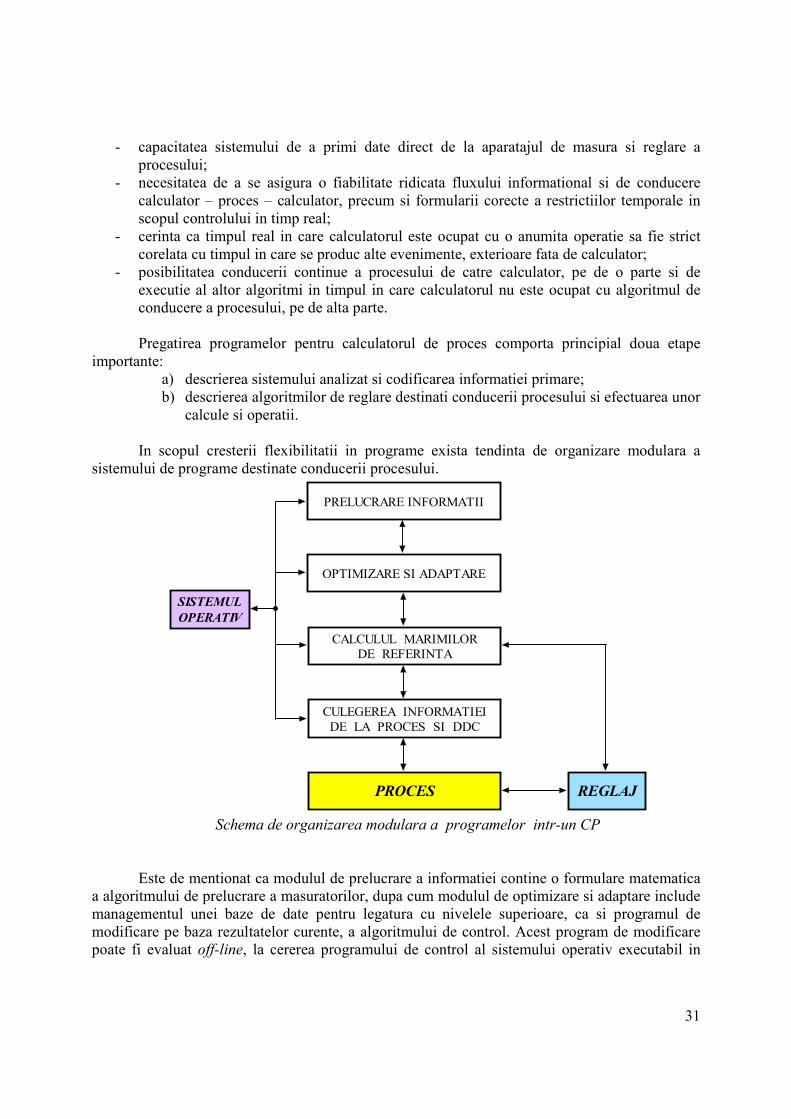
In scopul cresterii flexibilitatii in programe exista tendinta de organizare modulara a
sistemului de programe destinate conducerii procesului.
PRELUCRARE INFORMATII
PROCES
CULEGEREA INFORMATIEI
DE LA PROCES SI DDC
CALCULUL MARIMILOR
DE REFERINTA
OPTIMIZARE SI ADAPTARE
REGLAJ
SISTEMUL
OPERATIV
Schema de organizarea modulara a programelor intr-un CP
Este de mentionat ca modulul de prelucrare a informatiei contine o formulare matematica
a algoritmului de prelucrare a masuratorilor, dupa cum modulul de optimizare si adaptare include
managementul unei baze de date pentru legatura cu nivelele superioare, ca si programul de
modificare pe baza rezultatelor curente, a algoritmului de control. Acest program de modificare
poate fi evaluat off-line, la cererea programului de control al sistemului operativ executabil in
32
timp real. Este de mentionat ca sistemul operator este cel ce asigura prelucrarea si memorarea
“flexibila” a datelor si rezultatelor.
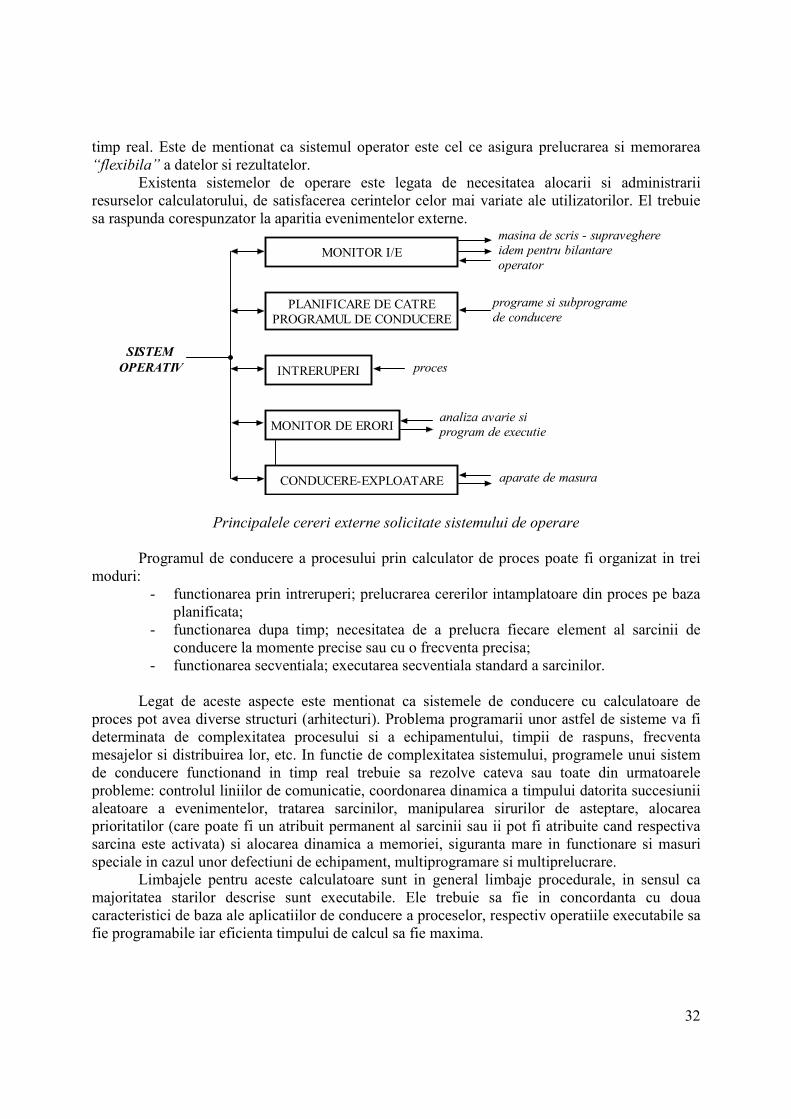
Existenta sistemelor de operare este legata de necesitatea alocarii si administrarii
resurselor calculatorului, de satisfacerea cerintelor celor mai variate ale utilizatorilor. El trebuie
sa raspunda corespunzator la aparitia evenimentelor externe.
MONITOR I/E
CONDUCERE-EXPLOATARE
PLANIFICARE DE CATRE
PROGRAMUL DE CONDUCERE
MONITOR DE ERORI
INTRERUPERI
masina de scris - supraveghere
idem pentru bilantare
operator
programe si subprograme
de conducere
proces
analiza avarie si
program de executie
aparate de masura
SISTEM
OPERATIV
Principalele cereri externe solicitate sistemului de operare
Programul de conducere a procesului prin calculator de proces poate fi organizat in trei
moduri:
- functionarea prin intreruperi; prelucrarea cererilor intamplatoare din proces pe baza
planificata;
- functionarea dupa timp; necesitatea de a prelucra fiecare element al sarcinii de
conducere la momente precise sau cu o frecventa precisa;
- functionarea secventiala; executarea secventiala standard a sarcinilor.
Legat de aceste aspecte este mentionat ca sistemele de conducere cu calculatoare de
proces pot avea diverse structuri (arhitecturi). Problema programarii unor astfel de sisteme va fi
determinata de complexitatea procesului si a echipamentului, timpii de raspuns, frecventa
mesajelor si distribuirea lor, etc. In functie de complexitatea sistemului, programele unui sistem
de conducere functionand in timp real trebuie sa rezolve cateva sau toate din urmatoarele
probleme: controlul liniilor de comunicatie, coordonarea dinamica a timpului datorita succesiunii
aleatoare a evenimentelor, tratarea sarcinilor, manipularea sirurilor de asteptare, alocarea
prioritatilor (care poate fi un atribuit permanent al sarcinii sau ii pot fi atribuite cand respectiva
sarcina este activata) si alocarea dinamica a memoriei, siguranta mare in functionare si masuri
speciale in cazul unor defectiuni de echipament, multiprogramare si multiprelucrare.
Limbajele pentru aceste calculatoare sunt in general limbaje procedurale, in sensul ca
majoritatea starilor descrise sunt executabile. Ele trebuie sa fie in concordanta cu doua
caracteristici de baza ale aplicatiilor de conducere a proceselor, respectiv operatiile executabile sa
fie programabile iar eficienta timpului de calcul sa fie maxima.





























