Embed Size (px)
Citation preview
Mr. Tool
“Because you’re a tool and left the garage dirty, again!”
Max Koessick IMDL Summer 2003
Mr. Tool Project Brief Autonomous vehicle that will
detect and collect ferrous tools from a garage floor in a random pattern Based on 1/16th scale R/C tank
chassis (Originally >$300) Behaviors implemented
include: metal detection, obstacle avoidance, target acquisition, target collection

Mr. Tool Processor Overview Originally used ATMega 128 with Atmel
STK500/501 ($79/$79) ATMega323 (Included) Uses:
4 PWM’s (8 Bit) 3 External IRQ’s I2C (Two Wire Interface) 12V (10 1.2V/1800mAH NiMH AA’s)
Mr. Tool Mechanical Overview Powered by single Marubuchi RS-540S 6V, 1A,
11,000 RPM motor and stout gearbox
Metal track and 28 wheel independent torsion bar suspension; 4 fixed wheels 2 front wheels control track tension 2 rear drive sprockets
Dual clutch for track control (one motor = no turn in place)
Mr. Tool Mechanical Overview Servos move mechanical arm for clutch and
switch for speed control Direction control (clutch)
Slip turn Pivot turn
3 Forward and 3 Reverse Speeds Only use lower two in both F/R Third speed only effective in O’Dome or for
chasing cars
Mr. Tool Mechanical Overview Carbon fiber/aluminum lifting arm (Free!!)
Original direct drive ineffective New winch style much more effective
Tamiya Planetary Gearbox ($11) 400:1 Reduction at 18,000 RPM Advertised 15Kg lifting force
Mr. Tool Mechanical Overview Tamiya Planetary Gearbox (Continued)
Required 3V input is supplied by PWM 7.2V H-Bridge .5A Stall Current Draw 1A Texas Instruments SN754410 Quadruple H-Bridge (Free!!)
Electromagnet ($35) 30 lbs of lifting force Control by TTL Power FET Fairchild H76107P (Free!!) Shares main 7.2V Battery
Mr. Tool Mechanical Overview Power Supply
(24) 1.2V 1800 mAH NiMH 10 required, others for backup Fabricated 10 cell battery holder
(2) 7.2V 3000 mAH 1 required, 1 backup
Provisions for ‘Shore Power’
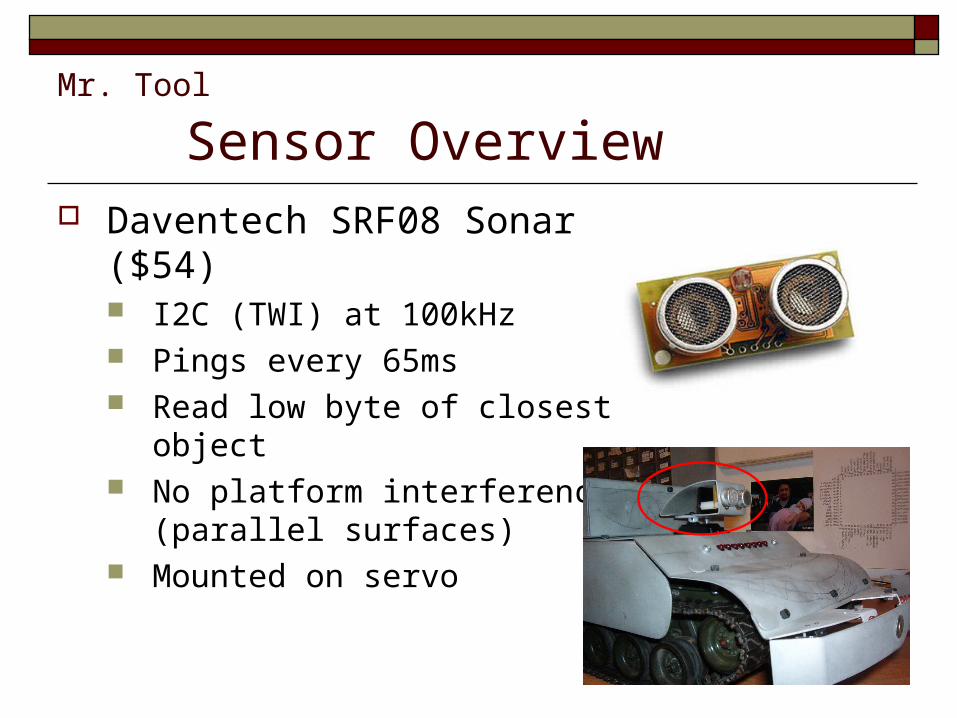
Mr. Tool Sensor Overview Daventech SRF08 Sonar ($54)
I2C (TWI) at 100kHz Pings every 65ms Read low byte of closest object No platform interference (parallel
surfaces) Mounted on servo
Mr. Tool Sensor Overview Bump Switches (¢65)
Front Collision – Replaced by Sonar Rear Collision – Replaced by digital IR—now used to start
code (bump to start) Target Acquisition
Determines possible target (2) located on front collector Selectable negative or positive logic through 10k pullup In series, normally closed Port protection through 150Ω series resistor
Mr. Tool Sensor Overview Hall Effect Geartooth Sensor—Cherry Sensors
GS100701 ($32) Metal Detection, no external magnet needed Negative logic External IRQ
Mr. Tool Sensor Overview Sharp GP2D12 IR Sensor
Originally used digital GP2D15—toasted with reverse battery
Devised digital conversion instead of using ‘Next Day Air’ to buy new one (@ $43)
Digital conversion uses LM311 Comparator and a reference voltage set by a potentiometer
Distance (in) Output (V)
15 .4
14 1.1
13 5.32 (Vcc)
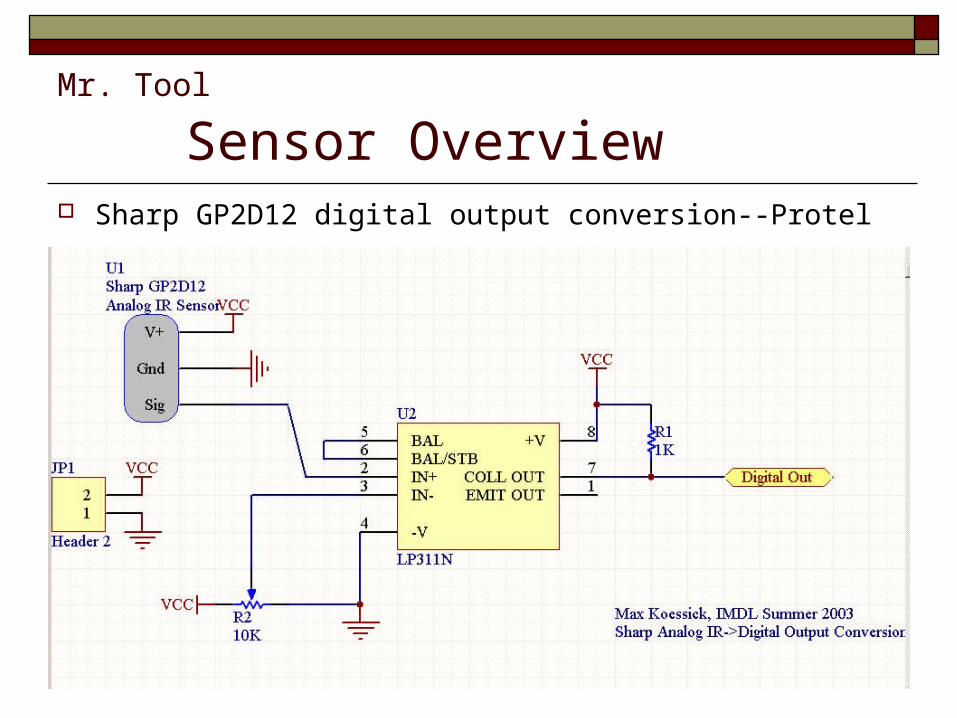
Mr. Tool Sensor Overview Sharp GP2D12 digital output conversion--Protel
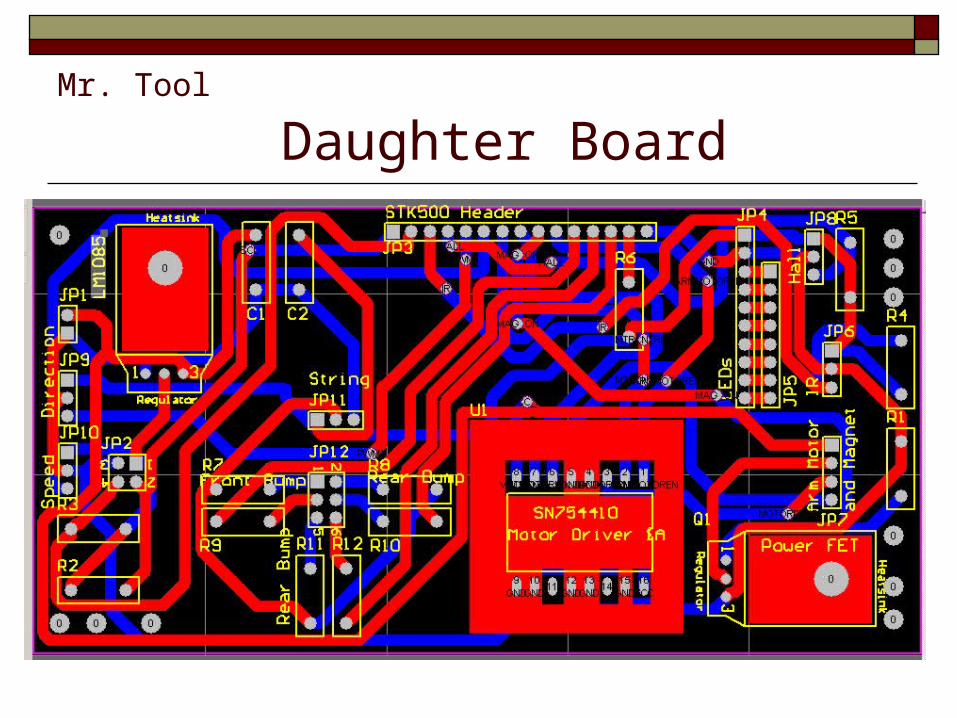
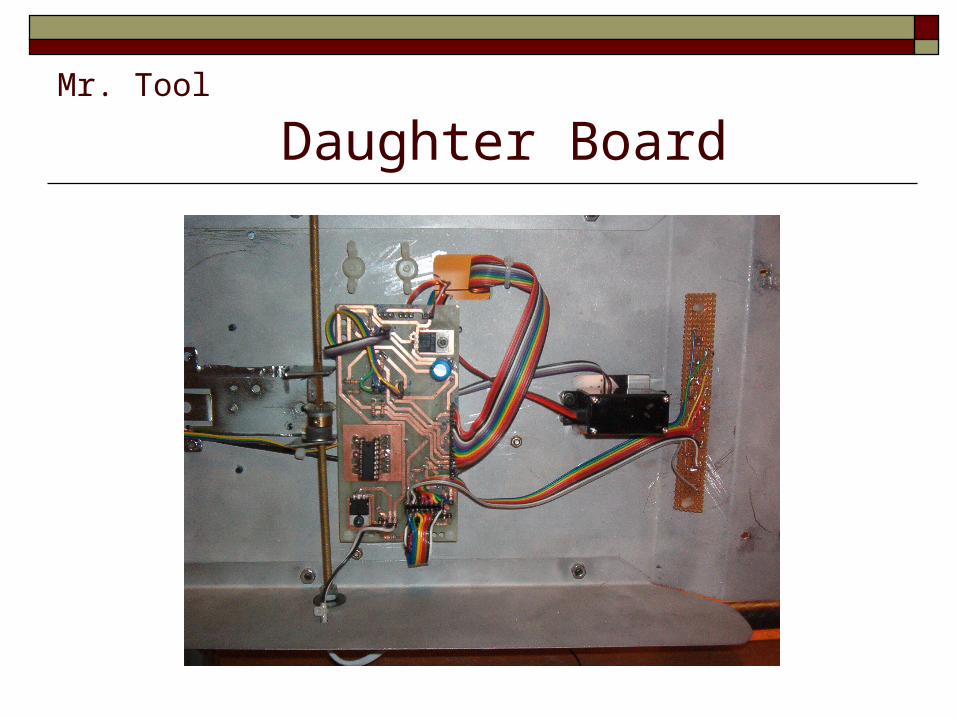
Mr. Tool Daughter Board 2 Layer Protel design, intermediate between sensors
and development board (4.9”x2.8”)
National LM1085 5V, 3A regulator on large copper heatsink
Power supplied by 7.2V motor battery
Noise suppressed by 100uF input capacitor
Mr. Tool Daughter Board Houses Power FET, H-Bridge, pull-ups, and
sensor jumpers Large board mounted copper heatsink planes for H-
Bridge and TO-220 Packages
To prevent unwanted shorts, rubbed out entire board by hand with Dremel
60 mil traces—handles large amounts of power, not susceptible to board flex
Mr. Tool Daughter Board
Mr. Tool Daughter Board
Mr. Tool LED Board Constructed on protoboard
+5V→Anode Cathode→330Ω→Port Pin
Mr. Tool Concluding Remarks Will it be done by Thursday?
Will I sleep? Maybe and maybe
Behavioral code complete-mostly tested 1 day to add winch assembly, front bump switches
(circuitry in place), and basket 1 day left for Murphy Painted by Media Day (Orange and Blue splinter
camo)