Embed Size (px)
Citation preview

Multicontroller SMC21 _ Informations sur le produit

PISM
C21_
03.F
M
2

PISM
C21_
03.F
M
3
Table des matières
1 Propriétés du Multicontroller 1.1 Description..................................................................................................................... 41.2 Propriétés particulières du Multicontroller.............................................................. 41.3 Description du fonctionnement.................................................................................. 51.4 Sécurité des données .................................................................................................. 5
2 Avertissements et erreurs 2.1 Avertissements ............................................................................................................. 82.2 Erreurs ............................................................................................................................ 9
3 Branchement électrique 3.1 Entrées.......................................................................................................................... 103.1.1 Entrées du boîtier de commande ............................................................................. 103.1.2 Entrées du capteur de charge.................................................................................. 103.1.3 Entrées de la température......................................................................................... 113.1.4 Fonctions additionnelles............................................................................................ 113.1.5 Branchement micro-ordinateur / portable ............................................................. 113.2 Sorties........................................................................................................................... 123.2.1 Éléments de commutation pour levage et descente ........................................... 123.2.2 Relais -err et -option .................................................................................................. 12
4 Caractéristiques mécaniques 4.1 Dimensions .................................................................................................................. 134.2 Possibilités de fixation ............................................................................................... 134.3 Branchement des fils ................................................................................................. 134.4 Affectation des bornes .............................................................................................. 13
5 Caractéristiques techniques 5 Caractéristiques techniques .................................................................................... 14
Sous réserve de modifications techniques, d'erreurs et de fautes d'impression
06.08

PISM
C21_
03.F
M
4
1 Propriétés du Multicontroller
1.1 Description • Le Multicontroller est un appareil de commande, d’analyse et de couplage pro-grammable pour moteurs à une ou deux vitesses. Il est assorti de façon optimale à l’application pratique des moteurs de levage, et donne pour cet usage une solution globale compacte. Pour le responsable de l’exploitation, il constitue la base d’un travail sûr, d’une grande longévité et de la preuve de l’utilisation effective du palan. Avec le Multicontroller, STAHL CraneSystems crée une nouvelle norme de sécurité pour appareils et installations de levage.
1.2 Propriétés particulières du Multicontroller
• Surveillance continue de la charge par déconnexion en cas de surcharge, aussi en état arrêté du palan
• Protection contre la surcharge par contrôle automatique de la charge (ALC) (ne s’applique pas dans le cas d’opération avec convertisseur de fréquence)
• Protection permanente contre la surcharge par contrôle automatique de la charge (ALC) avec protection intégrée contre la surcharge.
• Mémoire d'état de sollicitation pour la totalisation du temps de fonctionnement en fonction de la charge
• Surveillance de la température du moteur de levage et du moteur de direction• Saisie des données d’exploitation, comme p. ex. heures de fonctionnement,
démarrages du moteur et alternances de charges• Possibilité de régler différentes fonctions de temps, p. ex. anti-pianotage sur la
vitesse lente et rapide du moteur• Anti-mou de câble en cas de fonctionnement avec éléments de préhension de la
charge• Réalisation simple d'un deuxième point de déconnexion sous charge• Raccordement simple de transmetteurs de signaux optiques et acoustiques• Raccordement en option d’un affichage de grandes dimensions de la charge• Raccordement en option d’un affichage de la charge dans l’interrupteur de
commande HBC • Raccordement en option d’un affichage des fonctions dans l’interrupteur de
commande radio• Fonction de tarage pour affichage de charge• Échange de données avec un micro-ordinateur possible (commutable) par
interface sérielle RS 232 ou par interface USB • Interface de communication CAN est intégrée • Grande sécurité des données grâce à une mémorisation redondante• Mémorisation des données fiable en cas de panne du secteur, sans batterie-
tampon• Affichage des fonctions par LED • Activation du contrôle du palan possible par actionnement d'une touche ou par
l'intermédiaire du logiciel.• Possibilité de communiquer avec une radiotélécommande HBC
09.08

PISM
C21_
03.F
M
5
1 Propriétés du Multicontroller
1.3 Description du fonctionnement 1.3.1 Contrôle automatique de la charge ALC
La fonction de base de l’ALC est la protection contre la surcharge. Le système empêche le levage de la charge du sol. Un caractêristique important pour le levage de la charge est la progression de la charge par unité de temps.
Si pendant le levage d’une charge du sol en levage normal une progression imper-missible de la charge soit identifiée, le Multicontroller commute forcément le moteur sur la vitesse lente. Après que le Multicontroller ait identifié la charge et si la charge soit plus basse que le seuil de déconnexion, le levage normal est de nouveau permis (voir Fig. 1)
Si pendant la phase de levage d’une charge du sol en levage normal une progression impermissible de la charge soit identifiée, le Multicontroller commute forcément le moteur sur la vitesse lente. Grâce à la vitesse de levage lente la charge augmente très lentement. Si la charge dépasse le seuil de déconnexion, une surcharge est identifiée et le mouvement de levage est déconnecté. Grâce à la vitesse de levage lente la distance de freinage est courte et la sollicitation du palan n’est guère au-dessus du seuil de déconnexion (voir Fig. 2).
Grâce au contrôle automatique de la charge ALC, on a la plus grande sécurité possi-ble même pendant le travail avec charge suspendue. Des situations dangereuses comme par exemple le fait que la charge suspendue au crochet heurte quelque chose ou reste accrochée à quelque chose, ainsi que des vibrations de la charge sont immédiatement identifiées par le Multicontroller qui commute sur la vitesse lente. S’il n’y a plus de situation dangereuse, le Multicontroller commute sur la vitesse rapide si l’opérateur actionne la touche pour la vitesse rapide. Mais si une surcharge est identifiée, le mouvement de levage est déconnecté immédiatement (voir fig. 3 et 4).
Le contrôle automatique de surcharge empêche de façon fiable des surcharges extrêmes qui pourraient entraîner la destruction de la structure porteuse, ou la rup-ture du câble ou bien de la chaîne. Il est ainsi atteint un nouveau niveau de sécurité pour appareils de levage et systèmes de ponts roulants et palans .
Identification de la charge
VitesseSignal de
Fig. 2 Identification d’une surcharge avec ALC
Signal de
Signal de
Fig. 3 Changement de la charge par heurtage de la charge, avec ALC
Signal de
Signal de
Signal de
Signal de
Fig. 4 Changement de la charge par accrochage de la charge avec ALC
Signal de
charge
sortieSMC
charge
sortieSMC
charge
sortieSMC
charge
sortieSMC lente
t
t
t
t
t
t
t
t
Fig. 1 Levage d’une charge avec ALC(charge au-dessus du seuil de déconnexion)
(charge au-dessous du seuil de déconnexion)
09.08

PISM
C21_
03.F
M
6
1 Propriétés du Multicontroller
1.3.2 Surveillance de la températureEn version standard, la température du moteur de levage est surveillée. En cas d’activation du conducteur à froid du moteur, une indication est donnée par DELs sur le Multicontroller, et il n’est plus possible de mouvoir la charge qu’après le moteur de levage soit refroidi. Les fonctions de temps programmables dans le Multicontroller, permettent d’empêcher différents pianotages (vitesse rapide, changement de direction). De ce fait, un échauffement rapide du moteur est exclu, ce qui garantit une protection fia-ble du moteur contre l’échauffement. En option, il peut être raccordé une deuxième thermistance (par exemple avertissement préalable pour la température). Cette entrée pour température peut être utilisée aussi pour la surveillance de la température du moteur de déplacement. La sortie se fait par la sortie Moteur de déplacement à gauche/à droite et peut, de plus, se faire par le contact de relais "Option". L'affectation des sorties et entrées est déterminée lors de la configuration du Multicontroller (chapitre 3.1.3).
1.3.3 Arrêt en cas de mou de câbleLors de la descente d’une charge, il est nécessaire, dans certaines applications, d’identifier que la charge est déposée ou que le câble ne supporte plus la charge. Dans ce cas, le mouvement de descente ne doit pas se poursuivre. La fonction Arrêt en cas de mou de câble entraîne la coupure du mouvement de descente dès que le Multicontroller identifie que le câble ne supporte plus la charge. Il n'est plus alors possible de commander le palan qu'en montée. Pour la fonction Arrêt en cas de mou de câble, un poids mort permanent est nécessaire comme c’est le cas par exemple lors du travail avec pince preneuse (réglable de 5-30%). La précision de coupure dépend du capteur de charge utilisé. Si le signal venant du capteur de charge est incorrect, l’arrêt en cas de mou de câble est désactivé automatiquement. Il est possible de déactiver la fonction mou de câble par un signal d’entrée sur le Multicontroller (chapitre 3.1.4).
1.3.4 État de sollicitationLe Multicontroller enregistre à sécurité intégrée l’utilisation effective du palan selon F. E. M. 9.755. Des données existantes sont déduites les heures sous pleine charge et ainsi la durée restante d’utilisation, compte tenu de la charge, du temps de fonctionnement et de la vitesse de levage. Le Multicontroller peut indiquer quand est atteinte la valeur limite de l’état de sollicitation qui est spécifiée par le groupe d’entraînement concerné selon F. E. M. 9.511 (p.ex. 2 m = 1.600 heures sous pleine charge).
1.3.5 Caractéristiques de serviceOutre l’état de sollicitation, d’autres données importantes sont encore comptées, mémorisées et calculées dans le Multicontroller. Les caractéristiques de services suivantes sont déterminées séparément pour la vitesse de levage/descente rapide et la lente :• Nombre total d’heures de fonctionnement• Démarrages du moteur• Facteur de marche (FM)• Couplages par heure (c/h)En outre, le Multicontroller enregistre le• Nombre de surcharges• Nombre de coupures imputables à la température• Nombre des alternances de charge et d’alternances sous pleine charge en résultant. • Redémarrages du systèmeCela permet aussi d’obtenir des informations sur la fatigue à laquelle sont soumises les structures porteuses. Les caractéristiques de service peuvent, si nécessaire, être lues par un micro-ordinateur (portable), interprétées graphiquement, imprimées et archivées. L’enregistrement des caractéristiques de service permet de déterminer l’utilisation effective de l’installation de levage.
06.08

PISM
C21_
03.F
M
7
1 Propriétés du Multicontroller
1.3.6 Contrôle du pont roulant (levage de charges d'épreuve)
Pour effectuer le contrôle du pont roulant, il faut lever une charge d'épreuve (125 % de la charge nominale). On communique cela au Multicontroller par actionnement de la touche S5 ou, en cas de radiotélécommande HBC, de la touche micron 6 en mode auxiliaire. Mais lors d'un contrôle du palan, on ne renonce pas à une surveillance de la charge, on augmente seulement le point de déconnexion à environ 135 % de la charge nominale. Ainsi une surcharge du palan n'est pas possible, même pendant le contrôle du pont roulant. Quand le mode Contrôle du palan est activé, la DEL rouge du Multicontroller clignote. Après 15....120 mn (réglable, standard 30 mn) et après redémarrage, le Multicontroller commute automatiquement de nouveau sur mode normal.
1.3.7 Affichage de charge
En option, le Multicontroller permet de piloter un affichage de charge. Plusieurs modèles d’affichage sont disponibles à cet effet. La précision de la valeur affichée dépend du capteur de charge utilisé. Avec les capteurs de câble proposés par STAHL CraneSystems, il est atteint des précisions d’affichage de <±5 de la charge suspendue au crochet.Il est possible de tarer la charge (voir 3.1.4). Il est ainsi possible d’afficher aussi très facilement le poids utile dans le cas déterminé, quels que soient les moyens de suspension utilisés.En combinaison avec une radiotélécommande de la société HBC, les données sui-vantes du palan peuvent être représentées par le visuel de l'émetteur manuel micron 6 pendant le fonctionnement.
• le type d’appareil• la charge actuelle ou la surcharge • la charge, tenue compte d’un tarage existant • le nombre de commutations en levage normal • le nombre de commutations en descente normale • le nombre de commutations en levage très lent • le nombre de commutations en descente très lente • le nombre des heures de fonctionnement en levage normal • les heures de fonctionnement en levage très lent • les heures de fonctionnement sous pleine charge• la durée restante d’utilisation• Les messages actuels d'erreur ou d'avertissement sont représentés cycliquement
sur le visuel tant qu'ils existent.
1.4 Sécurité des données Grâce à des mesures spéciales affec-tant le matériel et le logiciel, une très haute sécurité des données est garantie dans le Multicontroller. Toutes les données font l’objet d’une mémorisation redondante. Une panne d’appareil n’équivaut pas à une perte de données. Un appareil de secours peut être initialisé avec les données accu-mulées jusqu’ici.
Contrôle du palan
Diode allumée
Diode clignotant
Diode éteinte
06.08

PISM
C21_
03.F
M
8
2 Avertissements et erreurs
2.1 Avertissements Les avertissements ont un caractère informatif pour l’utilisateur du palan. Un avertissement identifié et affiché par le Multicontroller n’entraîne pas de restriction des mouvements de levage. L’avertissement est donné par trois DELs (qui clignotent) sur la face frontale du Multicontroller. De plus la sortie peut avoir lieu par le relais option par moyen d’un paramétrage approprié (chapitre 3.2.2).
Spécification de Cause Éliminationl’avertissement
Dépassement de Charge partielle atteinte Réduire la chargecharge partielle
Avertissement préalable Moteur de direction Faire refroidir le moteur pour la température surchauffé, température de direction
dépassée
Erreur de la mémoire Erreur interne Envoyer au fabricant
Erreur de la mémoire Erreur interne Envoyer au fabricant
Information:Tarage d’affichage de charge, Tarage d’affichage de charge actionné,relais temporisé activé arrêt en cas de mou de câble, surveillance
de l’usage du frein, surveillance de la réactiondu frein pontés
Information:arrêt en cas de mou de câble Crochet ou palonnier activé sur le sol
Information:SMC en mode Contrôle Touche S5 actionnée pour mode du pont roulant Contrôle du pont roulant
voir chapitre 1.3.6
Information:Durée restante d’utilisation dépassée (S.W.P)
Une fois que la cause de l’avertissement est éliminée, l’avertiss-ment est affiché pendant encore 2 s par le Multicontroller puis il est automatiquement effacé.
06.08

PISM
C21_
03.F
M
9
2 Avertissements et erreurs
2.2 Erreurs Dans le système capteur de charge – conducteur à froid – Multicontroller, différents états peuvent apparaître. Si la valeur de signal du capteur de charge ne peut plus être identifiée, par exemple en cas de rupture de câble, le Multicontroller doit afficher cet état. Les états qui ne garantissent plus l’aptitude au fonctionnement parfait de l’appareil de levage, sont affichés en tant que erreurs. Cela se reconnaît immédiatement a l’indisponibilité du palan en montée. Les mouvements de descente sont cependant toujours permis. En plus de la DEL d’erreur rouge, le code d’erreur correspondant est donné sur la face frontale du Multicontroller par trois DELs (allumage ininterrompu). Outre l’affichage d’erreurs, il est possible aussi de prévoir une sortie d’erreurs par l’intermédiaire du relais "err". Le clignotement de la DEL d’erreur (rouge) signale que le mode Contrôle du palan est activé dans le IMulticontroller.
Spécification de l’erreur Cause Élimination
Erreur de capteur Vis de raccordement Vérifier raccordementsCourant du capteur <3,2 mA desserrées, rupture de fil
Rupture de fil de la Remplacer le ligne de mesure capteur de chargecapteur de charge défectueux
Surcharge Capacité de charge Descendremax. dépassée Réduire la chargeüberschritten au crochet
Température Conducteur à froid 1 Faire refroidir le excessive activé, moteur surchauffé moteur
ou capteur défectueux remplacer le oder Sensor defekt conducteur à froid
Surveillance du frein activée Contrôler le freinEntrée DI~
Défaut d’actionnement Entrées de commande Vérifiergauche+droit l’actionnement simultanément
Défaut d’initialisation Défaut dans le Multicontroller Redémarrer lemanque de tension de dispositifcommande, borne 6
06.08

PISM
C21_
03.F
M
10
3 Branchement éléctrique
3.1 Entrées 3.1.1 Entrées du boîtier de commande
Aux bornes 3, 4 et 5 sont raccordées les fonctions Levage / Descente du boîtier de commande. La borne 3 est l’entrée pour levage très lent, la borne 4 pour descente très lente, et la broche 5 pour la vitesse principale. Tous les boîtiers de commande courants dans la technique de levage peuvent être branchés. La tension de com-mande raccordée aux entrées 3, 4 et 5 doit coïncider avec la tension de fonctionne-ment du Multicontroller (voir indications figurant sur la plaque signalétique).Les condensateurs intégrés aux unités de pilotage aux entrées de commande dans le Multicontroller, neutralisent les signaux parasites sur les lignes arrivant aux ent-rées.
3.1.2 Entrées du capteur de charge
Au Multicontroller peuvent être raccordés capteurs de charge de 4...20 mA à 2 fils. Pour cela, un pont doit être raccordé entre les bornes 20 (terre) et 22 (I1-). Puis le capteur de charge est raccordé aux bornes 21 (l1+) et 19 (UBS). La résistance d’ent-rée du Multicontroller entre les bornes 21 et 22 est de 39,2Ω. Le capteur de charge correspondant doit présenter un comportement au transfert approximativement linéaire. Quand l’appareil de levage est à l’état sans charge, le signal du capteur de charge doit être de 4,0 mA. Il est ainsi garanti que le Multicontroller identifie sûre-ment une rupture de fil de liaison avec le capteur de charge.
Pour l’alimentation électrique de capteurs de charge ou d’amplificateurs de 4...20 mA, deux tensions sont disponibles :• 15 VDC±5%, 50mA geregelt über die Klemmen 19 (UBS) und 20 (GD, Masse)• 24 VDC, ±2%, 50mA geregelt über die Klemmen 24 (UB) und 20 (GD).
• 15 V c. c., ± 5 %, 50 mA, régulationpar les bornes 19 (UBS) et 20 (GD, masse)• 24 V c. c., ± 2 %, 50 mA, gulation par les bornes 24 (UB) et 20 (GD),
Si l’alimentation électrique du capteur de charge n’est pas assurée par le Multicon-troller, la masse de l’alimentation électrique extérieure doit être reliée à la borne 20.Au Multicontroller peut être raccordé aussi un capteur de charge de 4...20 mA à 2 fils. La ligne d’alimentation allant au capteur doit, dans ce cas, être raccordée à la borne 21. De plus, les bornes 20 et 22 doivent être reliées.
Au moyen du DCC1* de STAHL Cranesystems peut aussi un signal de charge digital (commutateur/ressort) être évalué, cependant la fonctionnalité du SMC21 est réduite.
-B273
W
+Hu
PE
2322212019 24
UBS GD l1+ l1- l2+ UB
WH
GN
*) Digital Current Converter
12.07

PISM
C21_
03.F
M
11
3 Branchement éléctrique
3.1.3 Entrées de la température
Aux bornes 16 et 17 se branche(nt) la (les) sonde(s) de température du moteur de levage. Si l’entraînement de levage a deux moteurs dont la température est sur-veillée, les deux sondes de température sont branchées en série. Si le (les) moteur(s) de levage n’a (n’ont) pas de sondes de température correspondantes, les bornes 16 et 17 doivent être reliées par une résistance de 250 Ω. Les valeurs des sondes de température à raccorder doivent correspondre aux indications de la DIN 44 080. Une résistance d’entrée élevée ou un court-circuit sont identifiés comme température excessive, et traités en tant que erreur par le Multicontroller et tous sorties (7...10) sont déconnectées. Après refroidissement du moteur, l’erreur est acquittée automa-tiquement par le Multicontroller, et les mouvements de levage sont de nouveau per-mis.
Aux bornes 25, 26, il peut de plus être raccordé une ou plusieurs sondes de tempéra-ture en vue de l’avertissement préalable pour la température. Les valeurs des sondes de température à raccorder doivent correspondre aux indications de la DIN 44 080. Une résistance d’entrée élevée est identifiée comme température excessive, et trai-tée en tant que avertissement par le Multicontroller. Après refroidissement du moteur, l’avertissement est acquittée automatiquement par le Multicontroller. Cette fonction peut aussi être utilisée pour la surveillance de la température des moteurs de direction et en option commutée au relais option.
3.1.4 Fonctions additionnellesL’entrée de la température, bornes 25 et 26, peut être utiliséeen alternative pour les fonctions suivantes :
• Pontage de la fonction Arrêt en cas de mou de câble , si cette fonction est pro-grammée.
• Tarage de l’affichage de charge, c.-à-d. la valeur 0,00 t est affichée sur le visuel.
Ces fonctions peuvent être paramétrisiées par moyen du ConfigTool.
3.1.5 Branchement micro-ordinateur / portable
Pour le branchement d’un micro-ordinateur ou d’un portable, le Multicontroller a, sur la face frontale de l’appareil, une prise subminiature D9 et une prise USB type B. Au moyen de les deux interfaces, l’appareil peut être raccordé selon choix, c.-à-d. commutable, paramétré par interrupteur.
USB RS232
Hoist motor temperature sensors
Travel motor temperature sensors

PISM
C21_
03.F
M
12
3 Branchement éléctrique
3.2 Sorties 3.2.1 Éléments de commutation pour levage et descente
• À la borne 6 est raccordée la tension de commande pour les contacteurs de levage
• La borne 7 est le départ pour le contacteur «levage lent»• La borne 8 est le départ pour le contacteur «levage rapide»• La borne 9 est le départ pour le contacteur «descente lente»• La borne 10 est le départ pour le contacteur «descente rapide»
• Pouvoir nominal de coupure du relais 250 V c. a., 5 A, mode de fonctionnement AC1
3.2.2 Relais -err et -optionLe relais err, bornes 27 et 28, est prévu pour la sortie d’erreurs. La sortie de relais sans potentiel peut être câblée avec un transmetteur de signaux optiques ou acou-stiques pour la télésignalisation d’erreurs dans le système. À cet effet sont disponi-bles les types de sorties : signal permanent et signal d’horloge.Il peut être configuré au choix comme contact de travail ou contact de repose.
Le relais option, bornes 29 et 30, est prévu pour la sortie d’avertissements du système. La sortie de relais sans potentiel peut être câblée avec un transmetteur de signaux optiques pour la télésignalisation d’avertissements (p. ex. point de charge partielle dépassé). Il peut être configuré au choix comme contact de travail ou con-tact de repose.Le temps de réponse et l’hystérésis pour le point de charge partielle peuvent être programmés.
• Pouvoir nominal de coupure du relais 250 V c. a., 5 A, mode de fonctionnement AC1

PISM
C21_
03.F
M
13
4 Caractéristiques mécaniques
4.1 Dimensions • 100 x 110 x 75 mm (La. x Ht. x Pr.)
4.2 Possibilités de fixation • Fixation encliquetable sur profilé chapeau 35 mm (NE 50022-35)• Fixation par vis au fond du boîtier (M4) (option)
4.3 Branchement des fils • 30 bornes avec vis plus-moins imperdables• Chaque borne : 1 x 4 mm² solide ou1 x 2,5 mm² toron à manchon DIN 46 228 ou
2 x 1,5 mm² toron à manchon DIN 46228 4.4 Affectation des bornes
Les entrées/sorties sont identiques à celles du SLE21. Un temps de ralentissement peut être réglé pour les sorties K.
Relais pour moteurde direction à gauche
Relais pour moteurde direction à droite
Entrée digitalecomme tension de service
Sortie descente rapide
Sortie descente lente
Sortie levage rapide
Sortie levage lent
Entrée levage/descente
Entrée levage rapide
Entrée descente rapide
Entrée levage rapide
Secteur - N
Secteur - L
Capteur de la température dumoteur de levage
Alimentation du capteur +15 c.c.
Masse pour capteur + entrées c.c.
Commutateur de chargeélectrique (I)
Alimentation du capteur +24V c.c.
Capteur de la températurep.ex. moteur de direction
Relais erreur
Relais options

PISM
C21_
03.F
M
14
5 Caractéristiques techniques
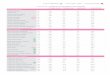
5 Caractéristiques techniques
Puissance absorbée < 9 VAGamme de la température : Fonctionnement
Stockage
-40°C ... + 55°C (standard)-40°C ... + 70°C (en option)-40°C ... + 70°C
Type de protection IP 20 EN 60 529CEM EN 61000-6-3 (2001)
EN 61000-6-2 (2001-10)Entrées de la température-Résistance totale à froid max. 1500 Ω DIN 0660-Résistance de réponse 2800 Ω ... 3500 Ω-Valeur de relâchement max. 1650 ΩSorties de relais 250 V / 5 A/2A
500 VAEntrées de commutation < 10 mAEntrée digitale IN (18) 24 V c.c.Bornes de connexion Bornes pour max. 2x1,5 mm² à manchonFixation Profilé chapeau NE 50022 TS35 ou par visPoidst 0,5 kgLogicielAffichage DEL Pwr Err III II I
} Numéros des erreurs/avertissements codés
Tensions de fonctionnement-10 ... + 15%, 50/60 Hz
24 V c.c.24 V c.a.42 V c.a.48 V c.a.110/120 V c.a.230 V c.a.
Alimentation du capteur UB (24) UBS (19)
24 V c.c.15 V c.c.totale < 50 mA
Entrées de capteur (analogique) à 2 fils à 4 fils
R in = 39.2 Ω; 0 ... 25 mA
Précision de commutation ± 1 % de la valeur finale

PISM
C21_
03.F
M
15

Vertriebspartnersales partner
Tochtergesellschaftsubsidiary
Europe T F E
Austria Steyregg +43 732 641111-0 +43 732 641111-33 [email protected]
France Paris +33 1 39985060 +33 1 34111818 [email protected]
Great Britain Birmingham +44 121 7676414 +44 121 7676490 [email protected]
Italy S. Colombano +39 0185 358391 +39 0185 358219 [email protected]
Netherlands EL Haarlem +31 23 51252-20 +31 23 51252-23 [email protected]
Portugal Lissabon +351 21 44471-61 +351 21 44471-69 [email protected]
Spain Madrid +34 91 484-0865 +34 91 490-5143 [email protected]
Switzerland Däniken +41 62 82513-80 +41 62 82513-81 [email protected]
America/Asia T F E
China Shanghai +86 21 6257 2211 +86 21 6254 1907 [email protected]
India Chennai +91 44 4352-3955 +91 44 4352-3957 [email protected]
Singapore Singapore +65 6271 2220 +65 6377 1555 [email protected]
U.A.E. Dubai +971 4 805-3700 +971 4 805-3701 [email protected]
USA Charleston, SC +1 843 767-1951 +1 843 767-4366 [email protected]
F-PI
-5.1
-FR-
09.0
8-m
p
STAHL CraneSystems GmbH, Daimlerstr. 6, 74653 Künzelsau, GermanyTel +49 7940 128-0, Fax +49 7940 55665, [email protected]